Устройство контроля ленточки основы и круглая ткацкая машина - RU2592177C2
Код документа: RU2592177C2
Чертежи







Описание
Изобретение касается устройства контроля ленточки основы для ткацких машин, в частности круглых ткацких машин, имеющего сенсорный элемент, у которого имеется проход для ленточки основы, при этом сенсорный элемент может совершать возвратно-поступательное движение между исходным положением, в котором он имеет предварительное напряжение, и рабочим положением, в которое он может перемещаться за счет натяжения проходящей через проход ленточки основы, и имеющего детектор исходного положения, который обнаруживает нахождение сенсорного элемента в исходном положении или приближение сенсорного элемента к исходному положению, и при обнаруженном исходном положении сенсорного элемента или его приближении к исходному положению подает сигнал исходного положения.
Изобретение касается также круглой ткацкой машины, у которой множество ленточек основы может подводиться к круглому берду, имеющей основной привод и устройство управления, при этом круглая ткацкая машина оснащена устройствами контроля ленточки основы.
Круглые ткацкие машины известны давно. Они имеют обычно круглое бердо, к которому от называемой «шпулярником» рамы или так называемого навоя подводится множество ленточек основы. Этим ленточкам основы в круглом берде с помощью расположенных вокруг центральной оси средств подъема ленточек основы, которые чаще всего выполнены в виде групп лент с проушинами, которые могут совершать возвратно-поступательное движение посредством верхних и нижних роликов, попарно сообщается встречное восходящее и нисходящее переменное движение, благодаря чему между группами ленточек основы образуется зев, в котором одна или несколько катушек с ленточками утка циркулируют на ткацких челноках вокруг центральной оси и при этом укладывают ленточку утка между двумя группами ленточек основы, благодаря чему образуется рукавная ткань, которая вытягивается из круглой ткацкой машины и подвергается дальнейшей обработке или наматывается в тюки.
Круглые ткацкие машины этого рода известны, например, из документа EP 0 786 026 B1.
Шпулярник, снабженный всегда множеством (обычно сотнями) катушек ленточки основы, или навои, которые всегда состоят из вращающейся оси и множества независимо друг от друга наматываемых на эту ось намоток ленточек основы, обычно располагаются по бокам круглой ткацкой машины с двух или более сторон. Ленточки основы каждой катушки по отдельности подводятся к круглому берду круглой ткацкой машины. Каждый раз когда катушка ленточки основы или соответственно намотка ленточки основы израсходовалась, т.е. находящаяся на ней ленточка основы достигла своего конца, соответствующая пустая катушка с ленточкой основы должна заменяться полной катушкой (например, весь навой) и новая/новые ленточки основы заправляться в круглую ткацкую машину. Этот процесс заправки может осуществляться проще, если конец предыдущей ленточки основы еще не был втянут в круглую ткацкую машину. Тогда можно, в частности, просто связать узлом конец предыдущей ленточки основы с началом новой ленточки основы, так чтобы заправка новой ленточки основы в круглую ткацкую машину не потребовалась. Для этого нужно, впрочем, иметь возможность своевременно распознавать израсходование катушки ленточки основы, что при иногда нескольких сотнях катушек ленточки основы непросто.
Для этой цели в прошлом были разработаны устройства контроля ленточки основы, которые могут распознавать израсходование катушки ленточки основы и подавать предупреждающий сигнал. Такое устройство контроля известно, например, из документа DE 562975.
Впрочем, оказалось, что одно лишь указание конца ленточки основы часто не может предотвратить повреждения круглой ткацкой машины, потому что вследствие неизбежной потери натяжения, которая наступает когда конец ленточки основы сходит с катушки, соответствующая ленточка основы неопределенным образом перемещается в круглой ткацкой машине, может образовывать петли, которые перематываются с другими ленточками основы или наматываются вокруг подвижных частей круглой ткацкой машины и мешают их надлежащему движению. Последствие таких неопределенным образом «болтающихся» в круглой ткацкой машине концов ленточки основы может быть фатальным и приводить к значительному разрушению круглой ткацкой машины. Независимо от этого, вследствие внезапно ослабляющегося натяжения при израсходовании катушки ленточки основы конец ленточки основы, как резиновая лента, выбрасывается вперед, из-за чего он чаще всего попадает в положение, в котором его больше невозможно схватить, чтобы привязать запасную ленточку основы.
Задачей настоящего изобретения является предложить решение для изложенных проблем уровня техники.
Настоящее изобретение решает эту задачу в первом аспекте путем усовершенствования упомянутого выше устройства контроля ленточки основы, при этом предусматривается зажимное устройство ленточки основы, между которым и сенсорным элементом может зажиматься ленточка основы, когда сенсорный элемент перемещается в свое исходное положение. Благодаря этой мере не только надежно обнаруживается достижение конца и вместе с тем сход ленточки основы со своей катушки, но и одновременно удерживается концевая область ленточки основы, прежде чем она может втягиваться в круглую ткацкую машину. Таким образом надежно предотвращается возможность причинения сошедшей ленточкой основы вреда в круглой ткацкой машине. Кроме того, конец ленточки основы находится в распоряжении в хорошо определяемом положении для привязки запасной ленточки основы.
Начальное натяжение сенсорного элемента в его исходном положении может, например, осуществляться за счет силы тяжести и/или силы пружины.
Настоящее изобретение решает вышеназванную задачу во втором аспекте путем предоставления круглой ткацкой машины, на которой множество ленточек основы может подводиться к круглому берду, которая имеет основной привод и устройство управления, при этом круглая ткацкая машина оснащена предлагаемыми изобретением устройствами контроля ленточки основы, сигналы исходного положения которых могут передаваться в устройство управления, при этом устройство управления при возникновении сигнала исходного положения останавливает основной привод. Благодаря остановке основного привода можно вставлять новую катушку ленточки основы и связывать начало новой ленточки основы с концом обнаруженной сошедшей ленточки основы, в то время как он зажат предлагаемым изобретением устройством контроля ленточки основы.
Другие преимущества и признаки вариантов осуществления предлагаемого изобретением устройства контроля ленточки основы поясняются ниже.
В одном из усовершенствований устройства контроля ленточки основы проход для ленточки основы в сенсорном элементе выполнен поперек направления его возвратно-поступательного движения между исходным положением и рабочим положением. Тем самым создается короткий и, следовательно, с малыми потерями на трение путь ленточки основы через сенсорный элемент. Кроме того, предотвращается возникновение отклоняющих сил, действующих на сенсорный элемент наискосок к направлению смещения. Наконец, при этом варианте осуществления изменения натяжения ленточки основы и связанное с этим более или менее сильное провисание приводят к значительным смещениям сенсорного элемента, которые, конечно, могут обнаруживаться легче, чем небольшие смешения.
Предпочтительно проход для ленточки основы в сенсорном элементе выполнен в виде открытого сбоку паза, благодаря чему достигается большая экономия времени при навешивании ленточки основы при подготовке круглой ткацкой машины к эксплуатации.
Чтобы обеспечивать заданные зажимные усилия между зажимным устройством и сенсорным элементом, предпочтительно, если сенсорный элемент оперт с фиксацией от вращения.
Высокие зажимные усилия, действующие на ленточку основы, могут достигаться, когда в предлагаемом изобретением устройстве контроля ленточки основы зажимное устройство оснащено выполненной в виде фрикционной поверхности зажимной поверхности, при этом предпочтительно фрикционная поверхность выполнена в виде фрикционного покрытия, такого как, например, резиновая обкладка или шероховатость поверхности, или выполненные зазубрины.
Чтобы обеспечить, чтобы ленточка основы зажималась между зажимным устройством и сенсорным элементом, в одном из вариантов изобретения предусмотрено выполнение зажимной поверхности и/или поверхности сенсорного элемента, обращенной к зажимной поверхности, в выпуклом исполнении, обращенными друг к другу.
В качестве другой меры для создания высокого зажимного действия может предусматриваться, что зажимное устройство, по меньшей мере, на отдельных участках охватывает сенсорный элемент в плоскости, поперечной направлению возвратно-поступательного движения сенсорного элемента. Благодаря этой мере даже при изменяющемся положении ленточки может достигаться надежное зажимное действие.
В одном из предпочтительных вариантов осуществления предлагаемого изобретением устройства контроля ленточки основы предусмотрено, что сенсорный элемент имеет головку и хвостовик, при этом в головке выполнен проход для ленточки основы, и ленточка основы может зажиматься между головкой и зажимным устройством, когда сенсорный элемент приближается к своему исходному положению. Такой сенсорный элемент дешев и точен в изготовлении, при этом также возникающие между сенсорным элементом и зажимным устройством зажимные усилия хорошо поддаются определению.
В одном из предпочтительных вариантов осуществления изобретения хвостовик установлен с возможностью осевого смещения. Осевая подвижность хвостовика определяет направление возвратно-поступательного движения сенсорного элемента между исходным положением и рабочим положением как линейного движения. Это линейное движение может просто обнаруживаться детектором, из-за чего при этом варианте осуществления предпочтительно, чтобы детектор обнаруживал приближение сенсорного элемента к своему исходному положению по положению хвостовика.
Чтобы устройство контроля ленточки основы могло адаптироваться к различным весам ленточки и жесткостям ленточки, в одном из предпочтительных вариантов осуществления изобретения предусмотрено, что на головке могут крепиться заменяемые веса, предпочтительно веса от 10 г до 100 г, или хвостовик является сменным, и предусмотрены хвостовики с различными весами, предпочтительно весами от 10 г до 100 г. Крепление весов или сменных хвостовиков к головке может, например, осуществляться посредством вставления, ввертывания или приклеивания.
Высокого зажимного действия между сенсорным элементом и зажимным устройством достигают, когда головка имеет форму, сужающуюся в направлении исходного положения, при этом она предпочтительно имеет угол (α) сужения от 5° до 120°, еще предпочтительнее от 5° до 60°. Другими словами, при этом варианте осуществления головка выполнена в виде «клина», благодаря чему ленточка основы «заклинивается». Чем меньше угол сужения, тем, естественно, выше достигаемое зажимное усилие; нижний предел угла сужения достигается, когда сенсорный элемент приобретает тенденцию к застреванию в зажимном устройстве. Верхний предел угла сужения достигнут, когда достигаемые зажимные усилия становятся слишком малыми.
Предпочтительно головка выполнена из керамического материала, потому что он долговечен и износостоек.
В качестве материала для хвостовика предпочитается металл, предпочтительно сталь, потому что он может хорошо и дешево обрабатываться и пригоден для самых разных детекторов.
Чтобы обеспечивать стабильное направление движущихся ленточек основы, могут быть предусмотрены направляющие ленточек основы, которые, если смотреть в направлении возвратно-поступательного движения сенсорного элемента, расположены сбоку от сенсорного элемента, при этом сенсорный элемент может продвигаться между направляющими ленточек основы.
Кроме того, предлагается применять в предлагаемых изобретением устройствах контроля ленточки основы детекторы, основанные на оптическом, электрическом или магнитном принципе. Такие детекторы могут быть выполнены, например, в виде световых затворов, в виде выключателей, при этом сенсорный элемент замыкает накоротко или разъединяет переключающие контакты, или в виде индуктивных или емкостных устройств, при этом смещение сенсорного элемента влияет на индуктивность или емкость.
Во время эксплуатации круглой ткацкой машины постоянно возникают также колебания натяжения ленточки основы, которые не имеют никакого отношения к израсходованию катушки ленточки основы, а обусловлены оперативно, например, при этом краевой виток катушки ленточки основы падает вниз на ось катушки и тем самым вызывает кратковременное, переходное падение натяжения, которое, однако, устраняется само, когда ленточка основы была втянута в круглую ткацкую машину на длину упавшего вниз витка. Чтобы в таких случаях предотвратить неправильную интерпретацию потери натяжения ленточки основы как достижения конца ленточки основы, в соответствии с изобретением предусмотрено, что детектор подает сигнал исходного положения только после того, как он обнаружил наличие сенсорного элемента в исходном положении в течение заданного промежутка времени. Благодаря этой мере временные колебания ленточки основы, которые вызывают смещение сенсорного элемента в исходное положение или близко к нему, не интерпретируются неправильно как закончившаяся катушка ленточки основы. Эта предложенная мера может быть также введена в программное обеспечение (например, в управлении).
Для сокращения до минимума трудоемкости прокладки кабелей у предлагаемого изобретением устройства контроля ленточки основы может быть предусмотрено, чтобы один единственный детектор обнаруживал исходное положение множества сенсорных элементов.
Теперь изобретение поясняется подробнее на примерах осуществления со ссылкой на чертежи.
На фиг.1 показан первый вариант осуществления предлагаемого изобретением устройства контроля ленточки основы на виде сбоку.
На фиг.2 показана деталь первого варианта осуществления предлагаемого изобретением устройства контроля ленточки основы на виде сбоку.
На фиг.3 показана другая деталь первого варианта осуществления предлагаемого изобретением устройства контроля ленточки основы на виде спереди.
На фиг.4 показан первый вариант осуществления предлагаемого изобретением устройства контроля ленточки основы в перспективе.
На фиг.5 показан альтернативный вариант осуществления сенсорного элемента устройства контроля ленточки основы.
На фиг.6 снова показан другой вариант осуществления сенсорного элемента устройства контроля ленточки основы.
На фиг.7 показан сенсорный элемент с фиг.6 с другим зажимным устройством.
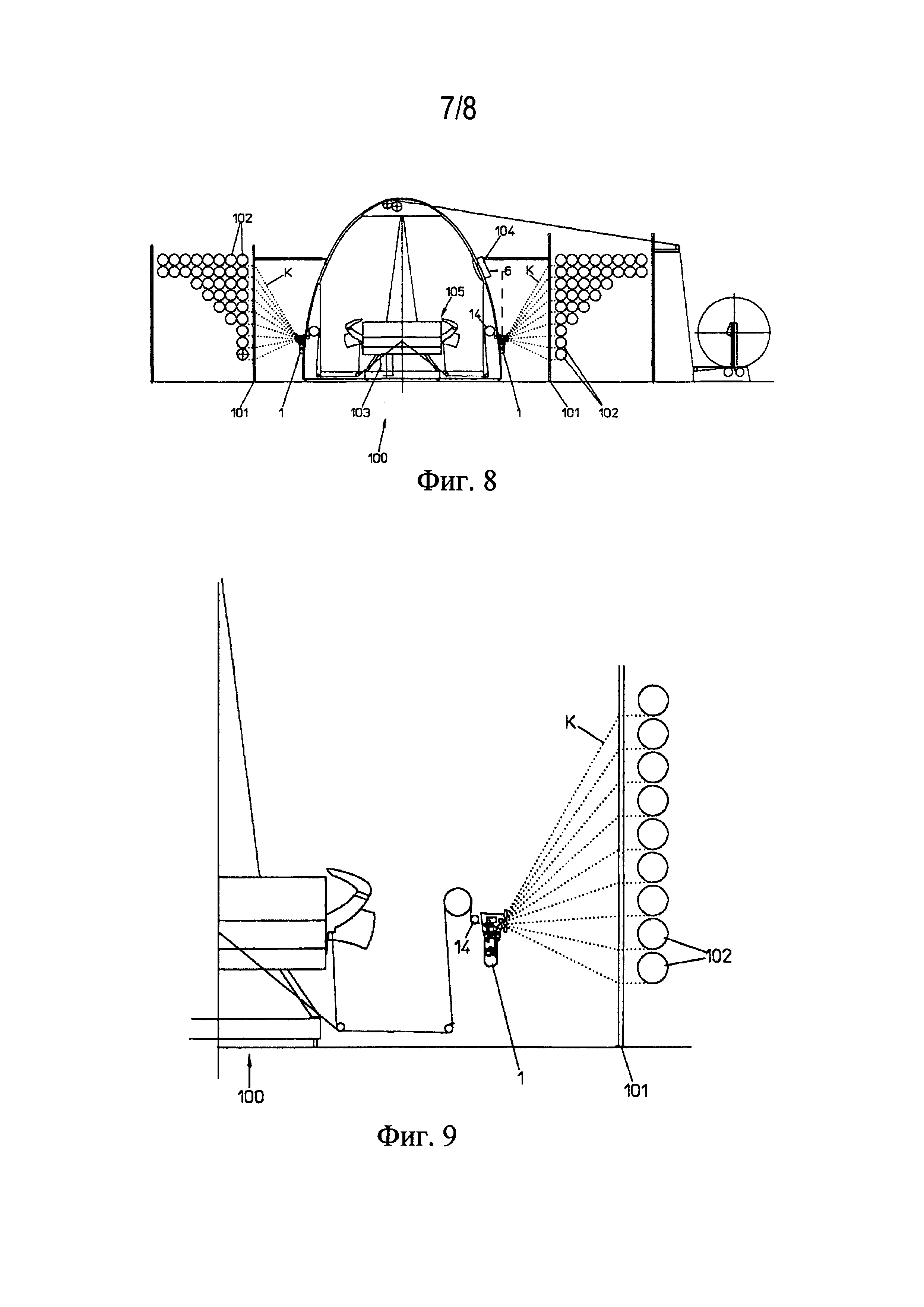
На фиг.8 показана круглая ткацкая машина, снабженная предлагаемым изобретением устройством контроля ленточки основы, на схематичном виде сбоку.
На фиг.9 показан детальный вид круглой ткацкой машины с фиг.8.
На фиг.10 показан детальный вид круглой ткацкой машины с фиг.8, у которой предлагаемые изобретением устройства контроля ленточки основы размещены в других местах.
На фиг.1, 2, 3 и 4 изображен первый вариант осуществления предлагаемого изобретением устройства 1 контроля ленточки основы для ткацких машин, в частности для круглых ткацких машин. Сначала делается ссылка на фиг.1, на которой на виде сбоку показаны два расположенных рядом устройства 1 контроля ленточки основы, и фиг.4, на которой в перспективе показано множество расположенных двумя рядами рядом друг с другом и друг за другом устройств 1 контроля ленточки основы. Каждое устройство 1 контроля ленточки основы включает в себя сенсорный элемент 2, который имеет проход 3a для ленточки K1, K2 основы. Сенсорный элемент 2 может совершать возвратно-поступательное движение между исходным положением R, в котором он имеет предварительное напряжение за счет силы тяжести, альтернативно за счет натяжения пружины, и рабочим положением A, в которое он может смещаться за счет натяжения F проходящей через проход ленточки K1, K2 основы. Сенсорный элемент 2 оперт в направляющей 7 с фиксацией от вращения.
На фиг.1 сенсорный элемент 2 правого устройства 1 контроля ленточки основы находится в исходном положении R. Начерченная штриховой линией ленточка K1 основы приходит справа сверху от не изображенного шпулярника ленточки основы или навоя, на верхнем валике 10 и нижнем валике 11 изменяет направление, затем перемещается через проход 3a сенсорного элемента 2, дальше перемещается к первой стержневидной направляющей 12 ленточки основы, на которой она снова изменяет направление, затем перемещается дальше по второй стержневидной направляющей 13 ленточки основы, и наконец, по обводному ролику 14 в не изображенную круглую ткацкую машину. Следует заметить, что сенсорный элемент 2 находится в исходном положении R потому, что ленточка K1 основы своим концом уже сошла со своей не изображенной катушки ленточки основы и поэтому больше не находится под натяжением.
На фиг.1 сенсорный элемент 2 левого устройства 1 контроля ленточки основы находится в рабочем положении A. Начерченная сплошной линией ленточка K2 основы приходит справа снизу от не изображенного шпулярника ленточки основы или навоя, на нижнем валике 11 изменяет направление, затем перемещается по первой направляющей 12 ленточки основы через проход 3a сенсорного элемента 2, затем перемещается дальше по второй направляющей 13 ленточки основы, и наконец, по обводному ролику 14 в не изображенную круглую ткацкую машину. Следует заметить, что сенсорный элемент 2 находится в рабочем положении A потому, что ленточка K2 основы находится под натяжением F, которое обусловливается, с одной стороны, ее втягиванием в круглую ткацкую машину, а с другой стороны, противодействующей силой катушки ленточки основы, на которую намотана ленточка K2 основы.
Верхний и нижний валик 10, 11, а также первая и вторая направляющая 12, 13 ленточки основы, если смотреть в направлении T возвратно-поступательного движения сенсорного элемента 2, расположены сбоку от сенсорного элемента 2, при этом сенсорный элемент 2 может продвигаться между направляющими 10, 11, 12, 13 ленточки основы.
Каждое устройство 1 контроля ленточки основы включает в себя также детектор 5 исходного положения, который обнаруживает нахождение сенсорного элемента 2 в исходном положении R или приближение сенсорного элемента 2 к этому исходному положению R, и при обнаруженном исходном положении R сенсорного элемента 2 или его приближении к исходному положению R подает сигнал 6 исходного положения. На фиг.1 правый сенсорный элемент 2 находится в исходном положении R, так что правый детектор 5 исходного положения подает сигнал 6 исходного положения.
Существенным признаком предлагаемого изобретением устройства 1 контроля ленточки основы является образованное в этом варианте осуществления двумя стержнями зажимное устройство 15, 16 ленточки основы для правого устройства контроля ленточки основы или соответственно зажимное устройство 16, 17 ленточки основы для левого устройства контроля ленточки основы. Ленточка K1 основы зажата между зажимным устройством 15, 16 ленточки основы и находящимся в исходном положении сенсорным элементом 2 правого устройства 1 контроля ленточки основы.
Теперь также делается ссылка на фиг.2, на которой показано левое устройство 1 контроля ленточки основы в увеличенном изображении сплошной линией в исходном положении R и штриховой линией в рабочем положении A. Сенсорный элемент 2 включает в себя головку 3 и хвостовик 4, при этом в головке 3 выполнен проход 3a для ленточки K2 основы. Ленточка K2 основы зажимается между головкой 3 сенсорного элемента 2 и зажимным устройством 16, 17, когда сенсорный элемент 2 приближается к своему исходному положению, при этом головка 3 вдвигается внутрь образованного из двух стержней зажимного устройства 16, 17, причем эти два стержня расположены параллельно друг другу на таком расстоянии, которое меньше, чем ширина головки 3, так что головка 3 застревает между стержнями. Для повышения трения стержни зажимного устройства 16, 17 оснащены, каждый, выполненной в виде фрикционной поверхности зажимной поверхностью 16a, 17a, при этом, например, фрикционная поверхность зажимного устройства 16 выполнена в виде фрикционного покрытия, такого как, например, резиновая обкладка, а фрикционная поверхность другого зажимного устройства 17 - в виде шероховатости поверхности или выполненных зазубрин. Стержни имеют круглое поперечное сечение, так что зажимные поверхности 16a, 17a, выполненные выпукло, обращены к поверхности головки 3 сенсорного элемента 2. Это дает очень хорошее зажимное действие.
Хвостовик 4 имеет прямоугольное поперечное сечение и установлен в прямоугольных выемках 7a (см. также фиг.4) направляющей 7, но с возможностью возвратно-поступательного движения (двойная стрелка T) по своей продольной оси L между рабочим положением A и исходным положением R. Видно, что проход 3a для ленточки K2 основы в сенсорном элементе 2 выполнен поперек направления T его возвратно-поступательного движения между исходным положением R и рабочим положением A. На виде спереди фиг.3, на который теперь также делается ссылка, отчетливо видно, что проход 3a для ленточки K2 основы выполнен в головке 3 сенсорного элемента 2 в виде открытого сбоку (3c) паза. Это позволяет навешивать ленточку основы, экономя время, при подготовке ткацкой машины к эксплуатации. В этом варианте осуществления детектор 5 обнаруживает приближение сенсорного элемента 2 к своему исходному положению R по положению хвостовика 4. Детектор 5 может быть основан на оптическом, электрическом или магнитном принципе и, например, быть выполнен в виде светового затвора или выключателя, при этом хвостовик 4 сенсорного элемента 2 замыкает накоротко или разъединяет переключающие контакты в детекторе 5, или в виде индуктивного или емкостного детектора 5, при этом обнаруживается смещение хвостовика 4 сенсорного элемента 2, которое влияет на индуктивность или емкость.
На головке 3 закреплен заменяемый вес 3b, который предпочтительно составляет от 10 г до 100 г, при этом крепление веса 3b к головке 3 может осуществляться посредством вставления, ввертывания или приклеивания. Кроме того, хвостовик 4 также может быть соединен с головкой 3 с возможностью смены, и могут предусматриваться хвостовики с различными весами, предпочтительно весом от 10 г до 100 г. Крепление хвостовика 4 к головке 3 может, например, осуществляться посредством вставления, ввертывания или приклеивания. Благодаря этим заменяемым весам сенсорный элемент может адаптироваться к различным весам и жесткостям ленточки.
Головка 3 имеет форму, сужающуюся в направлении исходного положения R, при этом она предпочтительно имеет угол (α) сужения от 5° до 120°, еще предпочтительнее от 5° до 60°. Чем меньше угол α сужения, тем выше достигаемое зажимное усилие. Однако если он выбирается меньше 5°, существует опасность, что головка 3 застрянет в зажимном устройстве 16, 17.
Предпочтительно головка 3 выполнена из керамического материала. Хвостовик 4 выполнен из металла, предпочтительно стали.
На фиг.4 видно, что в связи с занимаемым местом множество сенсорных элементов 2 расположены в направляющей 7 двумя параллельными рядами и со смещением друг относительно друга. Это расположение сенсорных элементов может целесообразным образом применяться для того, чтобы посредством одного единственного детектора обнаруживать нахождение множества сенсорных элементов в исходном положении. Для этого детектор выполняют в виде светового затвора и располагают его так, чтобы один детектор обнаруживал целый ряд сенсорных элементов. Для этого световой затвор устраивается так, чтобы в рабочем положении всех сенсорных элементов этого ряда путь света светового затвора не прерывался; но когда только один сенсорный элемент опускается в свое исходное положение, он попадает на путь света светового затвора. При расположении всех сенсорных элементов двумя параллельными рядами можно, таким образом, обойтись только двумя детекторами.
На фиг.5 показан похожий на фиг.2 вид сбоку альтернативного сенсорного элемента 22, который отличается от сенсорного элемента, примененного на фиг.2, только формой головки 23. Головка 23 выполнена, в частности, с вогнутыми наружными поверхностями 23a, 23b, которые обращены к выпуклым зажимным поверхностям 16a, 17a зажимного устройства 16, 17. Сторонами угла α сужения следует считать касательные в точках касания между наружными поверхностями 23a, 23b и зажимными поверхностями 16a, 17a. Прочие части соответствуют варианту осуществления устройства 1 контроля ленточки основы с фиг.1-фиг.4 и пронумерованы также теми же самыми ссылочными обозначениями.
На фиг.6 показан похожий на фиг.2 вид сбоку другого альтернативного сенсорного элемента 32, который отличается от сенсорного элемента, примененного на фиг.2, только формой головки 33. Головка 33 в своей нижней части выполнена дисковидной, так что она имеет выпуклую наружную поверхность 33a, которая обращена к зажимному устройству 34, 35. В этом варианте осуществления зажимное устройство 34, 35 выполнено в виде двух параллельных балок с прямоугольным поперечным сечением, которые задают плоские зажимные поверхности 34a, 35a, наклоненные друг к другу. Сторонами угла α сужения следует считать касательные в точках касания между наружной поверхностью 33a и зажимными поверхностями 34a, 35a. Прочие части соответствуют варианту осуществления устройства 1 контроля ленточки основы с фиг.1-4 и пронумерованы также теми же самыми ссылочными обозначениями.
На фиг.7 показан сенсорный элемент 32 во взаимодействии с показанным на фиг.1-4 зажимным устройством 16, 17, которое образуется двумя находящимися на расстоянии стержнями с круглым поперечным сечением. При этом варианте осуществления как зажимные поверхности зажимного устройства, так и поверхность сенсорного элемента в выпуклом исполнении обращены друг к другу.
На фиг.8 показан схематичный вид сбоку круглой ткацкой машины 100. Детальный вид круглой ткацкой машины 100 изображен на фиг.9. Слева и справа от круглой ткацкой машины 100 расположено по шпулярнику 101. На каждом шпулярнике установлено множество катушек 102 ленточки основы, с которых ленточки K основы по отдельности могут оттягиваться и по различным устройствам для изменения направления, таким как отводной ролик 14, подводиться к круглому берду 105 круглой ткацкой машины 100. Круглая ткацкая машина имеет также основной привод 103 и устройство 104 управления, при этом основной привод 103 приводит в движение подвижные элементы круглой ткацкой машины 100, а устройство управления 104 осуществляет электронное управление всеми функциями круглой ткацкой машины 100. Принцип действия такой круглой ткацкой машины хорошо известен специалисту, и поэтому не требует более подробного пояснения. Особенностью этой круглой ткацкой машины 100 является расположение предлагаемых изобретением устройств 1 контроля ленточки основы на пути ленточек K основы между катушками 102 ленточки основы и их втягиванием в круглую ткацкую машину 100. На изображении фиг.8 и 9 устройства 1 контроля ленточки основы расположены вблизи отводного ролика 14. Существенно, что сигналы 6 исходного положения устройств 1 контроля ленточки основы передаются в устройство 104 управления. Когда устройство 104 управления принимает сигнал 6 исходного положения, оно останавливает основной привод 103. Благодаря этому круглая ткацкая машина 100 приходит в состояние останова и обслуживающий персонал может заменять пустую катушку 102 ленточки основы, на которой совсем закончилась ленточка K основы, при этом потеряла свое натяжение, вследствие чего, в свою очередь, предусмотренный сенсорный элемент 2 принял свое исходное положение и устройство 1 контроля ленточки основы подало сигнал 6 исходного положения.
Однако иногда случается, что отдельные витки ленточек K основы падают со своей катушки 102 ленточки основы вниз на ось катушки. Это относится, в частности, к виткам, расположенным по краям катушки 102 ленточки основы. Это падение вниз отдельных винтов ленточки основы не имеет также никаких негативных последствий, а слабый виток постепенно сматывается. Впрочем, падение вниз витка ленточки основы приводит к временной потере натяжения соответствующей ленточки основы. Чтобы в таких случаях предотвратить неправильную интерпретацию потери натяжения ленточки K основы как израсходования катушки 102 ленточки основы, предусмотрено, что детектор устройства 1 контроля ленточки основы подает сигнал 6 исходного положения только тогда, когда он обнаружил наличие сенсорного элемента в исходном положении в течение заданного промежутка времени. Благодаря этой замедляющей мере временные колебания натяжения ленточки основы, которые вызывают смещение сенсорного элемента в исходное положение или близко к нему, не учитываются. Эта мера может быть также введена в программное обеспечение в устройстве 104 управления, когда это устройство запрограммировано так, что оно реагирует на сигнал 6 исходного положения только тогда, когда оно принимало его в течение некоторого заранее определенного периода времени.
На фиг.10 показан детальный вид круглой ткацкой машины с фиг.8, на котором предлагаемые изобретением устройства 1 контроля ленточки основы размещены непосредственно на шпулярнике 101.
Реферат
Устройство контроля ленточки основы для ткацких машин, в частности круглых ткацких машин, имеет сенсорный элемент, у которого имеется проход для ленточки основы. Сенсорный элемент может совершать возвратно-поступательное движение между первоначально натянутым исходным положением и рабочим положением, в которое он может перемещаться за счет натяжения проходящей через него ленточки основы. Детектор исходного положения обнаруживает нахождение сенсорного элемента в исходном положении или соответственно приближение сенсорного элемента к исходному положению. При обнаруженном в исходном положении сенсорного элемента или его приближении к исходному положению детектор подает сигнал исходного положения. Предусмотрено зажимное устройство ленточки основы, между которым и сенсорным элементом может зажиматься ленточка основы, когда сенсорный элемент перемещается в свое исходное положение. 2 н. и 17 з.п. ф-лы, 10 ил.
Формула
отличающееся тем, что проход (3a) для ленточки основы в сенсорном элементе (2, 22, 32) выполнен в виде открытого сбоку (3c) паза.
Комментарии