Зевообразующее устройство, ткацкий станок, оборудованный таким устройством, и способ образования зева с использованием такого устройства - RU2359076C2
Код документа: RU2359076C2
Чертежи

Описание
Настоящее изобретение относится к зевообразующему устройству ткацкого станка, а также к ткацкому станку, оборудованному таким устройством. Это изобретение также относится к способу образования зева на таком ткацком станке.
В ткацких станках для ткани типа Жаккарда (см., например, патенты FR-В-2772796 или FR-В-2808812) известно использование электрических приводных устройств для приведения в движение тросиковых элементов управления положением ремизок, сквозь ушки которых проходят нити основы. Указанные электрические приводные устройства приводят в движение ролики намотки тросиковых элементов, а управление этими приводными устройствами осуществляется при помощи электронных средств в зависимости от требуемого рисунка плетения.
В случае, когда ткацкий станок содержит большое число электрических приводных устройств, например 10000, вычислительные средства, предназначенные для определения заданного положения каждого приводного устройства в функции времени, должны быть очень мощными и между этими вычислительными средствами и этими приводными устройствами проходят весьма значительные потоки информации. Возможности шин передачи информации могут ограничивать эти информационные потоки, что может оказаться стесняющим обстоятельством, в том случае, когда ткацкий станок должен функционировать с высокой скоростью.
В основу настоящего изобретения поставлена задача устранения указанных недостатков путем создания зевообразующего устройства, которое может содержать большое число электрических приводных устройств и в котором потоки информации оптимизированы, а используемые вычислительные средства не являются слишком мощными.
Поставленная задача решена путем создания зевообразующего устройства типа машины Жаккарда, которое содержит множество электрических приводных устройств и средства управления этими приводными устройствами. Зевообразующее устройство характеризуется тем, что средства управления содержат
по меньшей мере одно первое вычислительное устройство,
по меньшей мере одно второе вычислительное устройство для управления несколькими приводными устройствами посредством по меньшей мере одного сигнала, являющегося репрезентативным для по меньшей мере одного параметра, определяемого вторым вычислительным устройством на основе по меньшей мере одного сигнала, принимаемого от первого вычислительного устройства и являющегося репрезентативным для по меньшей мере одного другого параметра.
Благодаря предлагаемому изобретению средства управления электрическими приводными устройствами распределены между одним или несколькими первыми вычислительными устройствами, с одной стороны, и одним или несколькими вторыми вычислительными устройствами, с другой стороны, причем эти вычислительные устройства могут представлять собой стандартные изделия, надежность и стоимость которых хорошо известны. Такое распределение позволяет оптимизировать информационные потоки вычислительными устройствами.
В соответствии с предпочтительными аспектами изобретения:
второе вычислительное устройство смещено относительно первого вычислительного устройства, причем второе вычислительное устройство расположено ближе к сервоприводам, которыми оно управляет, чем первое вычислительное устройство;
второе вычислительное устройство содержит средства вычисления, которые на основе одного или нескольких сигналов, принятых от первого вычислителя, могут рассчитать для данного периода времени заданное положение подвижной части каждого из сервоприводов, которыми управляет второе вычислительное устройство;
электрические сервоприводы представляют собой устройства вращательного типа и способны приводить в движение ролик намотки тросикового элемента привода ремизки, тогда как второе вычислительное устройство способно определить заданное угловое положение этого ролика в данный момент времени;
один или несколько сигналов, передаваемых первым вычислительным устройством во второе вычислительное устройство, являются репрезентативными, т.е. указывают положение ткацкого станка в его цикле функционирования в некоторый момент времени, а также тип профиля перемещения, выбранного для подвижного органа, перемещаемого каждым приводным устройством, управляемым этим вторым вычислительным устройством;
устройство содержит несколько вторых вычислительных устройств, которые принимают сигналы от одного и того же первого вычислительного устройства.
Предлагаемое изобретение также касается ткацкого станка, оборудованного зевообразующим устройством описанного выше типа. Такой ткацкий станок может функционировать с высокой скоростью без ограничений технических средств.
Предлагаемое изобретение также касается способа формирования зева, который может быть реализован с использованием описанного выше устройства и который заключается в том, что:
передают в первое вычислительное устройство в заданные моменты времени некоторый параметр, являющийся репрезентативным для положения ткацкого станка в его цикле функционирования;
присваивают каждому приводу некоторый тип профиля перемещения подвижного органа, управляемого этим сервоприводом, и определяют в первом вычислительном устройстве по меньшей мере один параметр, являющийся репрезентативным для этого типа профиля;
передают во второе вычислительное устройство по меньшей мере один сигнал, сформированный первым вычислителем и являющийся репрезентативным для упомянутых выше параметров;
рассчитывают во втором вычислительном устройстве на основе сигнала, принятого из первого вычислительного устройства, по меньшей мере один параметр управления по меньшей мере одним сервоприводом в течение заданного периода времени;
передают на привод сигнал, являющийся репрезентативным для указанного последнего параметра.
Первое вычислительное устройство может передавать параметры во второе вычислительное устройство через равномерные интервалы. Кроме того, профиль перемещения может быть определен несколькими параметрами, в частности амплитудой и/или смещением во времени по отношению к положению ткацкого станка в цикле функционирования, причем профиль присваивается индивидуально для каждого приводного устройства.
Предлагаемое изобретение поясняется ниже описанием предпочтительных вариантов его реализации со ссылками на сопровождающие чертежи, на которых:
Фиг.1 изображает общий вид ткацкого станка, содержащего зевообразующее устройство, согласно изобретению;
Фиг.2 изображает схему подключения средств управления приводными устройствами ткацкого станка согласно изобретению;
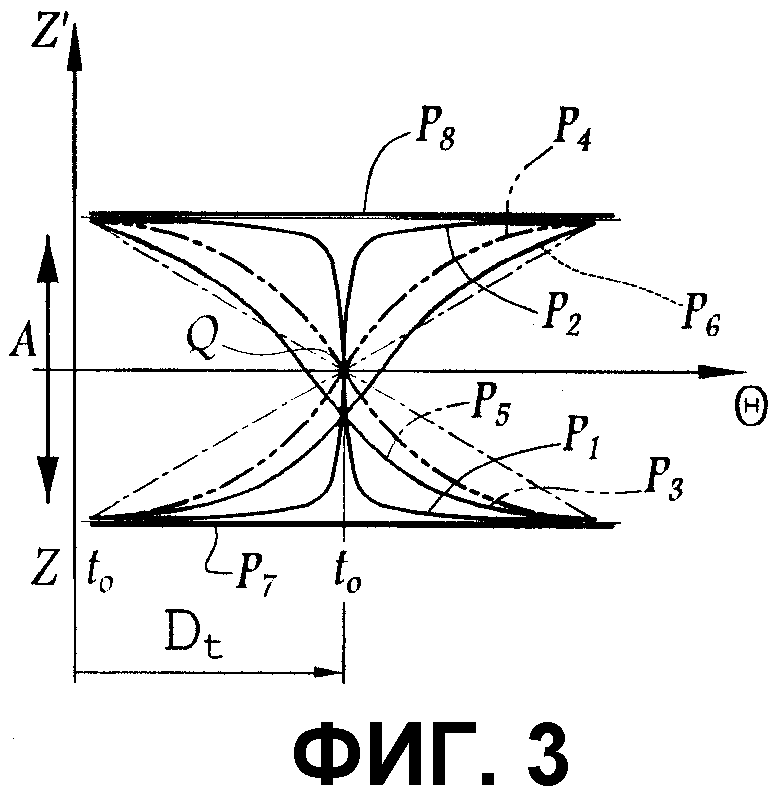
Фиг.3 изображает диаграммы различных возможных характерных профилей при изменении по времени положения ремизки, управляемой приводным устройством ткацкого станка, согласно изобретению.
Ткацкий станок М (фиг.1) снабжен нитями основы 1, каждая из которых проходит через ушко 2 ремизки 3, приводимой в колебательное движение в вертикальном направлении, условно показанное двойной стрелкой F1, причем это движение в целом осуществляется в направлении, перпендикулярном направлению движения уточных нитей, условно представленному двойной стрелкой F2. Каждая ремизка связана при помощи шнура 4 с роликом 5, приводимым во вращательное движение электрическим сервоприводом 6. В нижней части каждая ремизка 3 связана при помощи стержня 7 с возвратной пружиной 8, которая жестко закреплена на станине 9 ткацкого станка М.
На практике количество приводных устройств 6 в конструкции ткацкого станка М может быть значительным и составлять около 10000.
Для управления некоторыми приводными устройствами 6 использовано центральное вычислительное устройство С1, работающее совместно со смещенным вычислительным устройством С21. Вычислительное устройство С21 расположено в непосредственной близости от электрических сервоприводов 6, которыми оно управляет, тогда как вычислительное устройство С1 относительно удалено от этих сервоприводов. Вычислительное устройство С21 соединено с центральным вычислительным устройством С1 посредством электрической связи L21, по которой могут проходить один или несколько электрических сигналов, являющихся репрезентативными для параметров управления, передаваемых вычислительным устройством С1 в вычислительное устройство С21.
На практике предусмотрено использование множества вычислительных устройств С22, С23, … C2i, каждое из которых соединено с центральным вычислительным устройством С1 посредством связи L22, L23, … L2i и с несколькими приводными устройствами 6.
Вычислительное устройство С1 принимает сигнал S1, являющийся репрезентативным для мгновенного положения ткацкого станка М в цикле функционирования, например для мгновенного положения Θ главного вала 10.
Вычислительное устройство С2 также соединено с блоком U1, где находятся опорные элементы требуемого рисунка плетения. В функции подлежащего реализации рисунка плетения это вычислительное устройство получает из блока U1 сигнал S2, являющийся репрезентативным для типа профиля перемещения, которому должна следовать каждая ремизка 3, приводимая в движение каждым сервоприводом 61, … 6к, управляемым вычислительным устройством С21.
Множество типов профилей перемещений заложено в блоке U1 и эти профили могут иметь форму, представленную на фиг.3. Эти типы профилей перемещения соответствуют типам движения ушка 2 ремизки в функции положения Θ ткацкого станка в момент времени t вдоль вертикального направления Z-Z′, соответствующего направлению, показанному двойной стрелкой F1. Типы профилей Р1, Р3 и Р5 соответствуют смещению положения ушка в направлении вниз, тогда как типы профилей Р2, Р4 и Р6 соответствуют смещению положения ушка в направлении вверх. Тип профиля Р7 соответствует удержанию ушка в его нижнем положении, тогда как тип профиля Р8 соответствует удержанию ушка в его верхнем положении.
На фиг.3 все профили представлены как кривые, проходящие через некоторую особую точку Q. Однако это не является обязательным, точка изгиба некоторого типа профиля необязательно располагается на одинаковом расстоянии от его верхней и нижней границ.
На практике сигнал S2 соответствует для каждого сервопривода 6к, управляемого вычислительным устройством С21, опорному типу профиля Pm, который должен быть воспроизведен ремизкой 3 или ушком 2, управляемым этим сервоприводом.
Таким образом, в соответствии с требуемым рисунком плетения вычислительное устройство С1 имеет возможность передавать в вычислительное устройство С21 сигнал S21, который содержит для каждого сервопривода 61, 62, … 6к, управляемого вычислительным устройством С21, опорные элементы типа профиля Р1-Р8, который должен быть воспроизведен в последующий период времени. Другими словами, сигнал S21 содержит для каждого сервопривода 61, 62, … 6к опорные элементы типа профиля Pm и т.д., причем показатель к может иметь значение в диапазоне от 1 до 10000 в представленном варианте реализации, тогда как показатель m имеет значение в диапазоне от 1 до 8. Сигнал S21 также содержит составляющую, относящуюся к значению положения Θ ткацкого станка в его цикле функционирования в момент времени t, когда этот сигнал передается, что позволяет обеспечить синхронизацию сервоприводов 6.
Принимая во внимание характер передаваемой информации, сигнал S21 является относительно простым и может легко передаваться по линии связи L21.
На практике положение ткацкого станка в цикле функционирования передается с частотой, более высокой, чем частота, с которой передаются опорные элементы типов профиля, подлежащего отслеживанию. При этом осуществляется разделение информации, относящейся к типам профиля, и информации, относящейся к положению ткацкого станка.
В функции величины принятого параметра Pm вычислительное устройство С21 имеет возможность определить для каждого сервопривода 61, 62, … 6к, которым он управляет, величину параметра К1, … Кк управления, представляющего собой заданное положение ротора сервопривода, то есть на практике заданное положение его ролика 5. Это определение может быть выполнено, поскольку вычислительное устройство С21 снабжено запоминающим устройством М21, образующим библиотеку, в которой сохраняются величины, являющиеся репрезентативными для каждого из типов профиля Р1-Р8, или алгоритмы расчета этих величин.
На основе типа профиля, который был передан в вычислительное устройство С21, это вычислительное устройство имеет возможность рассчитать параметрированный профиль перемещения ремизки 3, приводимой в движение каждым из сервоприводов 61, 62, … 6к, которыми вычислительное устройство управляет.
На практике заданное положение каждого приводного устройства рассчитывается в вычислительном устройстве С21 для периода времени Δt до приема нового сигнала S21 от вычислительного устройства С1. Другими словами, заданная величина К1, К2, … Кк для каждого сервопривода 61, 62, … 6к представляет собой последовательность заданных мгновенных величин. При этом рассчитанная заданная величина К1, … Кк поступает в виде сигнала S′211, … S′21к в блок управления А211, … А21к, предназначенный соответственно для управления каждым сервоприводом 61, … 6к.
Аналогичным образом, каждое из смещенных вычислительных устройств С22, С23, … C2i принимает от центрального вычислительного устройства С1 сигнал S22, S23, … S2i, который позволяет также обеспечить управление сервоприводами 61-6к, которым центральное вычислительное устройство передает сигнал S′221, … S′22к, S′231, … S′23к, … через блок управления А221, … А22к, А231, … А23к, ….
Кроме того, можно предусмотреть, чтобы сигнал S′2ik, передаваемый через второе вычислительное устройство C2i на сервопривод 6к, содержал информацию, относящуюся к амплитуде А перемещения между верхней точкой и нижней точкой профиля Pm и к его смещению по отношению к положению ткацкого станка в его цикле функционирования, например смещение Dt точки изгиба Q по отношению к опорному моменту времени t0.
Благодаря предлагаемому изобретению поток информации между центральным вычислительным устройством С1 и смещенными вычислительными устройствами С21, С22, … C2i минимизируется в той мере, в какой этот поток информации содержит только данные о положении ткацкого станка в его цикле функционирования и об опорных элементах типа профиля Pm, который необходимо отслеживать в данном случае, причем вычисление заданного положения для каждого приводного устройства производится в смещенных вычислительных устройствах, которые могут иметь относительно небольшие вычислительные возможности, как и центральное вычислительное устройство.
Предлагаемое изобретение было представлено здесь в предположении использования электрических сервоприводов вращательного типа. Однако изобретение может быть использовано и в случае применения электрических приводных устройств любого другого типа, например линейных электрических приводных устройств.
Предлагаемое изобретение было представлено здесь в предположении использования электрических связей L21, … L2i, выполненных по схеме звезды между центральным вычислительным устройством и смещенными вычислительными устройствами. Разумеется, электрические связи могут быть реализованы и при помощи общей шины.
Предлагаемое изобретение было представлено здесь для случая, когда используется одно центральное вычислительное устройство. На практике могут быть использованы несколько таких центральных вычислительных устройств, причем каждый из них может быть связан с несколькими смещенными вычислительными устройствами.
Предлагаемое изобретение было представлено здесь для случая использования восьми типов профилей перемещения, но количество типов профилей может быть переменным по выбору проектировщика такого устройства или пользователя.
Реферат
Изобретение относится к области ткацких станков. Зевообразующее устройство ткацкого станка содержит множество электрических приводов (61, … 6к) и средства управления этими приводами, которые содержат по меньшей мере одно первое вычислительное устройство (С1), по меньшей мере одно второе вычислительное устройство (С21, … C2i) для управления несколькими приводами (6к) посредством сигнала (S'211, … S'21к, … S'2ik), являющегося репрезентативным для по меньшей мере одного параметра (К1, … Кк), определяемого вторым вычислительным устройством (С21, … С2к) на основе по меньшей мере одного сигнала (S21, … S2i), принимаемого от первого вычислительного устройства (С1) и являющегося репрезентативным для по меньшей мере одного другого параметра (Θ, Pm). Изобретение позволяет увеличить количество приводных средств с оптимизацией процесса управления. 3 н. и 7 з.п. ф-лы, 3 ил.
Формула
по меньшей мере одно первое вычислительное устройство (С1),
по меньшей мере одно второе вычислительное устройство (С21, … C2i) для управления несколькими приводами (61, … 6к) посредством по меньшей мере одного сигнала (S'211, … S'21к, … S'2iк), являющегося репрезентативным для по меньшей мере одного параметра (К1, … Кк), определяемого вторым вычислительным устройством на основе по меньшей мере одного сигнала (S21, … S2i), принимаемого от первого вычислительного устройства и являющегося репрезентативным для по меньшей мере одного другого параметра (Θn, Pm, A, Dt).
передают в первое вычислительное устройство (С1) в заданные моменты времени сигнал (S1), являющийся репрезентативным для положения (Θ) ткацкого станка в цикле функционирования,
присваивают в блоке (U1) каждому приводу (6, … 6к) некоторый тип профиля перемещения ремизки (3), перемещаемой приводом, и определяют в первом вычислительном устройстве по меньшей мере один параметр (Pm), являющийся репрезентативным для этого типа профиля,
передают во второе вычислительное устройство (С21, … C2i) по меньшей мере один сигнал (S21, … S2i), сформированный первым вычислительным устройством и являющийся репрезентативным для упомянутых параметров,
рассчитывают во втором вычислительном устройстве на основе сигнала, принятого от первого вычислительного устройства, по меньшей один параметр (Кк) управления по меньшей мере одним приводом в течение заданного периода времени,
передают на привод сигнал (S'211, … S'2ik), сформированный вторым вычислительным устройством и являющийся репрезентативным для параметра (К1, … Кк), рассчитанного во втором вычислительном устройстве (С21, … C2i).
Комментарии