Механизм зевообразования, трехпозиционная ремизоподъемная каретка и ткацкий станок, оснащенный такой кареткой - RU2363782C2
Код документа: RU2363782C2
Чертежи


Описание
Изобретение относится к механизму зевообразования, трехпозиционной ремизоподъемной каретке, а также к ткацкому станку, оснащенному такой ремизоподъемной кареткой.
Ткацкий станок, содержащий ремизоподъемную каретку, способную производить три положения нитей основы, используется в основном для выполнения особых тканей, в частности бархата или сукна.
Из патентной заявки EP-A-0839937 известна трехпозиционная ремизоподъемная каретка, в которой предусмотрены подвижные крючки для парного перемещения ножами каретки, причем один крючок каждой из пар опирается непосредственно на второй крючок этой пары. Крючки объединены попарно канатными элементами и связаны с несколькими шкивами, которые могут быть отодвинуты друг от друга различным образом, в зависимости от положения этих четырех крючков.
Также из EP-A-0899367 известна возможность предусмотреть в устройстве селекции для трехпозиционной ремизоподъемной каретки две пары поворотных рычагов, расположенных с двух сторон от двух расположенных друг над другом электромагнитов, при этом рычаги каждой пары могут управляться одним из электромагнитов и оснащены каждый стопором подвижного крючка, принадлежащего паре крючков, наложенных друг на друга и способных совместно перемещаться под действием ножа. Это устройство эффективно в эксплуатации, но относительно сложно в изготовлении, в случае когда один из поворотных рычагов простирается с двух сторон от оси его вращения с усовершенствованный формой, что ведет к увеличению себестоимости. Кроме того, масса волокна может накапливаться в зоне, предусмотренной между каждым рычагом и прилегающей частью электромагнита, который служит для управления его поворотом, что с течением времени может привести к ошибкам селекции, которые приводят к образованию «ошибок» на ткани или сукне в ходе изготовления.
В этом известном устройстве два подвижных крючка достигают окрестности мертвой точки своей траектории, между стопорами рычагов, и выполнены из пластика, и имеют переменную ширину в зависимости от допусков на изготовление, причем различия ширины подвижных крючком могут привести к неправильному позиционированию одного или другого поворотных рычагов удержания, что опять же может вызвать «ошибки» на ткани или сукне во время тканья.
Задача настоящего изобретения состоит в устранении недостатков вышеуказанных устройств за счет механизма зевообразования, предназначенного для использования в трехпозиционной ремизоподъемной каретке, и более простого в изготовлении и использовании и более надежного по сравнению с системами, известными из уровня техники.
Поставленная задача решается тем, что в механизме зевообразования для трехпозиционной ремизоподъемной каретки ткацкого станка типа Жаккарда, содержащем, по меньшей мере, два расположенных друг над другом электромагнита, которые могут быть выборочно задействованы, а также две пары поворотных рычагов удержания, причем рычаги удержания одной пары расположены с одной стороны от электромагнитов и оснащены каждый металлической арматурой, способной взаимодействовать с одним из электромагнитов и стопором для удержания подвижного крючка, принадлежащего паре крючков, способных перемещаться совместно под действием ножа, согласно изобретению внутри одной и той же подвижной пары крючков первый крючок содержит тело, предназначенное для опирания на нож, а также гибкую пластину, предназначенную для взаимодействия с одним из рычагов удержания, тогда как второй крючок содержит тело, предназначенное для опирания на тело первого крючка, а также гибкую пластину, предназначенную для взаимодействия с другим рычагом удержания той же пары рычагов, причем каждая пластина закреплена на соответствующем теле с возможностью отклонения, стопор каждого рычага удержания выполнен со стороны рычага, противоположной соответствующему электромагниту, стопоры рычагов одной пары смещены один относительно другого одновременно по направлению, параллельному направлению перемещения соответствующих подвижных крючков, и по направлению, перпендикулярному этому направлению перемещения, а части гибких пластин, предназначенные для взаимодействия с этими стопорами, имеют точно такое же смещение между собой в двух вышеупомянутых направлениях, когда тело второго подвижного крючка опирается на тело первого.
Благодаря изобретению, гибкая пластина, закрепленная на теле каждого подвижного крючка, предназначена для взаимодействия с одним из рычагов удержания пары рычагов, ее геометрия хорошо определена, так как допуски на изготовление пластины могут быть очень точными. С другой стороны, тело каждого крючка, которое преимущественно выполнено из синтетического материала, может быть прочным, так как имеет относительно большую массу. Гибкость пластины используется для того, чтобы обеспечить ее отклонение напротив тела каждого крючка, что позволяет ей эффективно входить в зацепление с соответствующим рычагом удержания во время выравнивания поворотных рычагов или для удержания крючка в окрестности верхнего положения его траектории. Так как стопоры двух рычагов одной пары направлены в одном направлении, усилие выравнивания, передаваемое гибкой пластиной на рычаги, полностью сопоставимо между двумя рычагами и, напротив, усилие удержания, передаваемое стопором каждого рычага, полностью сопоставимо между двумя крючками одной пары. Кроме того, электромагниты, их соответствующие устройства управления и соответствующие рычаги могут быть совершенно идентичными, что облегчает разработку станка, улучшает надежность, снижает себестоимость и позволяет получить более компактный механизм. Это важно в случае когда ремизоподъемная каретка может насчитывать более 10000 таких механизмов.
В соответствии с преимущественными, но не обязательными аспектами изобретения, такой механизм может иметь один или несколько отличительных признаков, взятых во всех технически возможных комбинациях:
- Пластины одной пары крючков способны упираться в рычаги удержания со стороны их соответствующих фиксаторов и прижимать эти рычаги к электромагнитам во время операции выравнивания.
- Каждый рычаг удержания поворачивается вокруг оси, неподвижной относительно корпуса механизма, и тянется по отношению к этой оси, главным образом, по направлению, перпендикулярному этой оси, и только с одной стороны от нее. Рычаги удержания являются более компактными и более прочными, чем рычаги из EP-A-0899367.
- Два рычага удержания одной пары совершенно идентичны, что ведет к получению экономии при изготовлении и облегчает управление складом запасных частей.
- Каждый рычаг удержания оснащен, по меньше мере, одним дефлектором, способным изолировать снаружи камеру переменного объема в зависимости от его углового положения. Это исключает накопления волокна в массе в такой камере и ограничивает риски нарушения работоспособности.
- Тело первого крючка оснащено, с первой стороны, стопором, способным упираться в соответствующий нож, и, на второй стороне, противоположной первой стороне, выступом, пригодным для опоры части тела второго крючка. Передача усилия от первого ко второму крючку одной пары, таким образом, имеет место без напряжения гибких пластин, установленных на каждом из этих тел, причем механические характеристики этих пластин могут быть оптимизированы в соответствии с их соответствующими функциями выравнивания и/или закрепления крючков на рычагах удержания. В этом случае стопор и выступ на теле первого крючка тянутся преимущественно с двух сторон от гибкой пластины, закрепленной на этом теле.
- Гибкие пластины подвижных крючков одной пары имеют различную ширину и направлены таким образом, что они могут сгибаться в одинаковых условиях, что позволяет прикладывать точно такое же усилие к соответствующим рычагам во время выравнивания.
Изобретение относится также к трехпозиционной ремизоподъемной каретке ткацкого станка Жаккарда, который содержит, по меньшей мере, один механизм селекции, такой как вышеописанный. Такая каретка более надежна и более экономична, чем каретки, известные из уровня техники.
Наконец, изобретение относится к ткацкому станку, оснащенному ремизоподъемной кареткой, такой как упомянутая выше. Такой станок более надежен и более прост в использовании, чем станки, известные из уровня техники.
Изобретение в дальнейшем поясняется описанием варианта осуществления ткацкого станка, ремизоподъемной каретки и механизма селекции, соответствующего его принципу, приведенного исключительно в качестве примера со ссылками на приложенные фигуры, в числе которых:
Фиг.1 изображает основной продольный разрез части зевообразующего механизма согласно изобретению в первой конфигурации;
Фиг.1A - детальный вид зоны взаимодействия между подвижным крючком и рычагом удержания в более крупном масштабе и в направлении стрелки A с фиг.1;
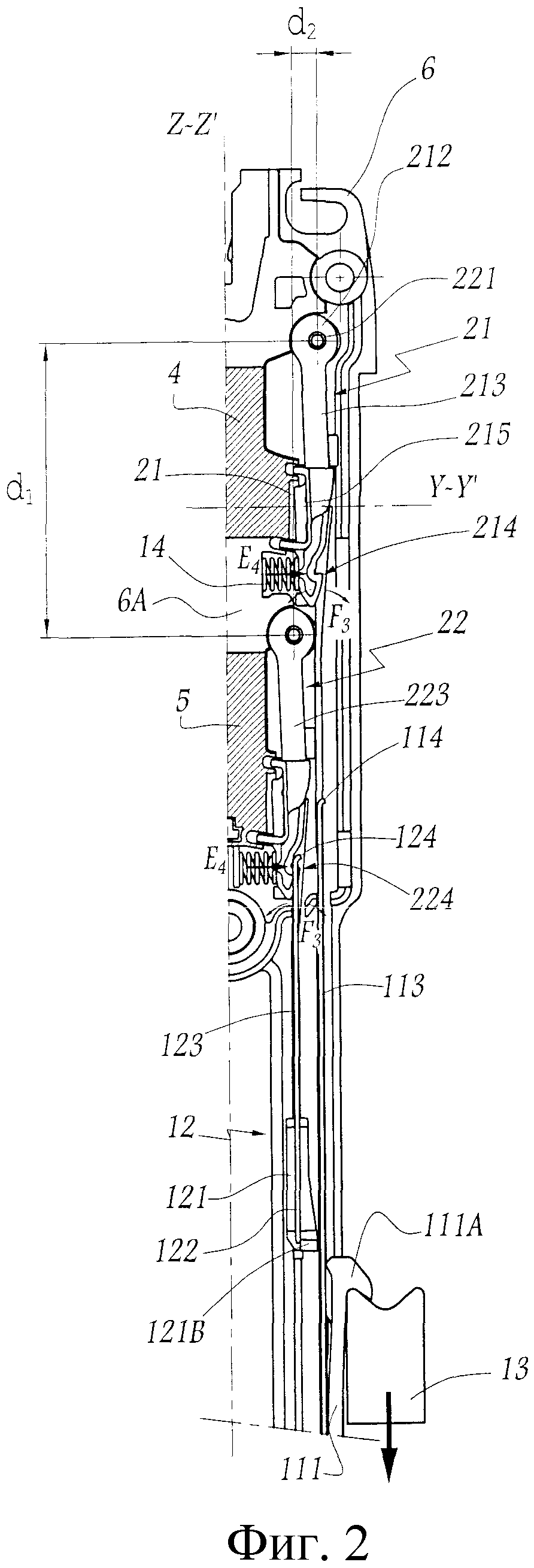
Фиг.2 - полуразрез, соответствующий правой части фиг.1, в то время как механизм находится во второй конфигурации; и
Фиг.3 - полуразрез, аналогичный фиг.2, в то время как механизм находится в третьей конфигурации.
Механизм зевообразования, представленный на фиг.1-3, предназначен для интеграции в трехпозиционную ремизоподъемную каретку, установленную на ткацком станке для изготовления сукна. Он позволяет управлять положением батана или крючка нижнего конца аркады, к которой подвешен или подвешены одна или несколько ремизок. Часть механизма, показанная на чертежах, соединена с несколькими шкивами, установленными в соответствии с технической инструкцией из EP-A-0839937, относительное положение шкивов позволяет управлять высотой батана или крючка вышеупомянутого конца. Для управления положением этих шкивов, два из которых схематически изображены только на фиг.1 с обозначениями P1 и P2, два канатных элемента 1 и 2 выполнены в виде шнуров, связывающих соответственно два внешних подвижных крючка 11 и 11' и два внутренних подвижных крючка 12 и 12'. Крючки 11 и 12, с одной стороны, и 11' и 12', с другой стороны, предусмотрены для того, чтобы перемещаться совместно под действием ножа 13 или 13', причем внутренний крючок каждой пары крючков опирается в этом случае на внешний крючок той же пары, что соответствует техническому решению по EP-0839937.
Механизм M содержит также два электромагнита 4 и 5, установленных параллельно направлению строго вертикальной оси Z-Z' на фиг.1 и которая соответствует направлению перемещения шкивов P1 и P2. Электромагниты 4 и 5 могут быть выборочно активированы посредством не показанного модуля управления.
С двух сторон от электромагнитов 4 и 5 расположены две пары рычагов 21 и 21' и соответственно 22 и 22'. Рычаги 21, 21', 22 и 22' являются структурно идентичными и каждый из них установлен с возможностью поворота вокруг оси 211, 211', 221 и 221' соответственно, геометрическая ось которой X211, X211', X221, X221' неподвижна относительно корпуса 6 механизма, неподвижного относительно конструкции станка. Оси X211 и оси эквивалентные им в общем случае перпендикулярны оси Z-Z'. Рычаг 21 содержит верхнее ушко 212, в котором выполнено отверстие для прохода оси 211 и тянется в основном ниже оси 211 на фиг.1, то есть на самом деле к низу по направлению, в общем параллельному оси Z-Z'. Рычаг 21 содержит металлическую арматуру 213, расположенную строго напротив электромагнита 4 и которая тянется по направлению, в основном параллельному оси Z-Z' и перпендикулярному оси X211. Рычаг 21 оснащен стопором 214, на который может быть прикреплена часть подвижного крючка 11, таким образом, как будет показано ниже.
Рычаг 21 несет также дефлектор 215, который позволяет изолировать снаружи камеру C21 переменного объема в зависимости от углового положения рычага 21 вокруг оси X211. Действительно, рычаг 21 установлен с возможностью поворота вокруг оси X211 таким образом, как следует из двойной стрелки F1, камера C21 ограничена двумя контактными полярными поверхностями, предусмотренными соответственно на рычаге 21 и на электромагните 4. Угловое положение рычага 21 может контролироваться посредством электромагнита 4 и пружины сжатия 14, которая вставлена между рычагом 21 и центральной частью 6A корпуса 6. Пружина 14 действует на рычаг 21 упругим усилием E4, которое стремится отвести стопор 214 от оси Z-Z'.
Рычаги 21', 22 и 22' структурно идентичны рычагу 21 и каждый из них оснащен металлической арматурой 213', 223 и 223', стопором 214', 224 и 224' и дефлектором 215', 225 и 225' и подвергнут воздействию пружины 14', 15 и 15'.
Рычаги 21', 22 и 22' тянутся также каждый по направлению, в основном параллельному оси Z-Z' относительно осей X211', X221 и X221'. Эти рычаги установлены с возможностью поворота вокруг их соответствующих осей, в направлении стрелок F'1, F2 и F'2 и их положение может контролироваться электромагнитами 4 или 5 и пружинами 14 и эквивалентными им.
Оси X211и X221 смещены параллельно оси Z-Z' на расстояние d1, превосходящее длину рычага 21. Эти оси также смещены по направлению Y-Y', перпендикулярному оси Z-Z' и осям X211 и X221, на расстояние d2, ось X211 более удалена от оси Z-Z', чем ось X221. Так как рычаги 21 и 22 идентичны, то и стопоры 214 и 224 также смещены на расстояния d1 и d2 одновременно параллельно оси Z-Z' и перпендикулярно этой оси.
Тот факт, что рычаги удержания тянутся только с одной стороны от их соответствующих осей вращения, позволяет легко достичь их хорошей геометрии, что обуславливает в значительной мере надежность функционирования механизма M. В частности, инерция вращения этих рычагов относительно мала, что позволяет использовать пружины возврата 14 и эквивалентные им, производящие усилие возврата E4 или эквивалентное ему усилие меньшей интенсивности и, следовательно, электромагниты 4 и 5 относительно менее мощные и значит более компактные.
Крючок 11 является двураздельным и содержит тело 111 из синтетического материала относительно массивное и в которое залит конец 112 гибкой металлической пластины 113, предназначенной для взаимодействия с рычагом 21. Эта двураздельная структура может быть близка к структуре, описанной в EP-A-1413657 для двухпозиционной ремизоподъемной каретки. Однако механизм настоящего изобретения существенным образом отличается от предшествующего уровня техники тем, что его особая конфигурация приспособлена для трехпозиционной ремизоподъемной каретки.
Пластина 113 оснащена в окрестности ее конца 114, наиболее удаленного от тела 111, отверстием 115 для приема стопора 214 рычага 21. Таким образом, как показано на правой стороне фиг.1, крючок 11 может удерживаться в положении в окрестности верхней мертвой точки своей траектории рычагом 21.
Таким же образом, крючок 12 содержит тело 121 из синтетического материала, в котором залит нижний конец 122 гибкой металлической пластины 123, предназначенной для взаимодействия с рычагом 22. В окрестности ее верхнего края 124 пластина оснащена отверстием для приема стопора 224 рычага 22.
Пластина 113 заметно длиннее, чем пластина 123, что соответствует тому факту, что в положении удержания подвижных крючков 11 и 12 в окрестности верхней мертвой точки их траектории расстояние между телом 111 и стопором 214 значительно превосходит расстояние между телом 121 и стопором 224.
Пластины 113 и 123 за счет их гибкости способны на угловое отклонение относительно их зоны закрепления на телах 111 и 121, как показано стрелками F3.
Пластины 113 и 123 направляются каждая по направляющей 116 или 126, образованной корпусом 6 и которая тянется до окрестности рычага 21 или 22. На том же расстоянии d6 от крючков 214 и 224 направляющие 116 и 126 расширяются, отдаляясь от оси Z-Z' и возвращаясь к стопорам, чтобы позволить изгибание пластин 113 и 123 на одной высоте, в окрестности их верхних концов соответственно 114 и 124. Таким образом, даже если пластины 113 и 123 имеют различные длины, они изгибаются в аналогичных условиях, что означает, что усилия выравнивания, передаваемые на рычаги 21 и 22, совершенно идентичны.
Когда крючок 12 опирается на крючок 11, концы 113 и 124 пластин 113 и 123 и, в частности, их отверстия 115 и эквивалентные им имеют такое же пространственное смещение, что и стопоры 214 и 224. Иначе говоря, концы 214 и 224 смещены на расстояние d1 параллельно Z-Z' и на расстояние d2 параллельно Y-Y', что позволяет им одновременно взаимодействовать с крючками 213 и 224.
Структура подвижных крючков 11' и 12' соответственно идентична структуре крючков 11 и 12.
Стопоры 214 и 224 направляются относительно основной части рычагов 21 и 22 напротив магнитов 4 и 5. Таким же образом, стопоры 214' и 224' направляются напротив электромагнитов. Таким образом, пластины 113, 123, в частности соответствующие пластины 113' и 123' подвижных крючков 11' и 12', контактируют с рычагами 21, 22, 21' и 22' снаружи напротив электромагнитов 4 и 5, что является особенно выгодным во время выравнивания рычагов удержания, то есть в положении, показанном на левой стороне фиг.1, когда нож 13' перемещает крючок 11' так, чтобы верхние концы 114' и 124' пластин 113' и 123' двигали рычаги 21' и 22' в направлении электромагнитов 4 и 5. Если один или другой из электромагнитов 4 или 5 активирован модулем управления, рычаг или рычаги 21' и 22' эффективно удерживаются в совершенно прижатом состоянии к электромагниту или электромагнитам, что позволяет крючку 11' и, в случае необходимости, крючку 12', опускаться, опираясь на нож 13', когда он начинает свой ход вниз.
Такая конфигурация показана на правой части фиг.2 и соответствует опусканию ножа 13, после того как выравнивание было осуществлено, как показано на левой части фиг.1. В этом случае электромагнит 4 был активирован, в то время как электромагнит 5 не был активирован так, чтобы стопор 224 рычага 22, который отодвинут пружиной 15, задержал в некотором положении пластину 123 и, следовательно, узел крючка 12, в то время как, принимая во внимание активацию электромагнита 4, стопор 214 рычага 21 отведен назад с траектории пластины 113, что позволяет крючку 11 снова опуститься, опираясь на нож 13.
Как и пластины 113 и 123, пластины 113' и 123' направляются по направляющим, обеспечивающим равенство усилий выравнивания, действующих на рычаги 21' и 22'.
В конфигурации фиг.3 электромагниты 4 и 5 были активированы таким образом, что стопоры 214 и 224 рычагов 21 и 22 были отведены назад с траекторий опускания пластин 113 и 123 после выравнивания. В этом случае крючки 11 и 12 снова опускаются с ножом 13, опираясь на него.
Тело 111 содержит стопор 111A, предназначенный для опирания на нож 13, во время перемещения крючка 11, так же как выступ 111B, расположенный со стороны тела 111, противоположной стопору 111A, относительно пластины 113; этот выступ 111B предназначен для опоры выступа 121B, образованного телом 121, в частности в конфигурациях фиг.1 и 3. Таким образом, взаимодействие между телами 111 и 121 крючков 11 и 12 не влияет на части этих крючков, используемые для их удержания в верхнем положении, так же как в случае материалов известных из EP-A-0839937 и EP-A-0899367.
Ремизоподъемная каретка согласно изобретению включает в себя несколько механизмов, таких как механизм, описанный выше и показанный на чертежах; на практике это механизм ремизок или групп ремизок, положение которого должно быть управляемым.
Ткацкий станок согласно изобретению и оснащенный ремизоподъемной кареткой, такой как вышеописанная, может быть использован для тканья особых тканей, в частности бархата или сукна. Он более экономичен при покупке и при эксплуатации и имеет малые риски ошибок.
Изобретение было представлено с двумя электромагнитами 4 и 5, расположенными между рычагами 21, 21', 22 и 22'. Оно также применимо в случае, когда число электромагнитов равно четырем, один электромагнит для каждого рычага.
Кроме того, лезвия 113, 113', 123 и 123' не обязательно являются металлическими. Они могут быть выполнены из синтетического материала, имеющего механические характеристики, пригодные для их функций, например из углеродных волокон или из пластика с добавлением нитей усиления.
Реферат
Изобретение относится к текстильному машиностроению и касается механизма зевообразования, трехпозиционной ремизоподъемной каретки, а также ткацкого станка, оснащенного такой ремизоподъемной кареткой. Механизм содержит два установленных друг над другом электромагнита, а также две пары поворотных рычагов удержания, расположенных попарно и оснащенных стопором подвижного крючка, принадлежащего паре крючков. В одной паре первый подвижный крючок содержит тело, предназначенное для опоры на нож, а также гибкую пластину, взаимодействующую с рычагом удержания, тогда как второй крючок содержит тело, предназначенное для опирания на тело первого крючка, а также гибкую пластину, взаимодействующую с другим рычагом удержания той же пары рычагов. Каждая пластина закреплена на соответствующем теле с возможностью отклонения, и стопор каждого рычага выполнен со стороны рычага, противоположной соответствующему магниту. Изобретение обеспечивает надежность и простоту в использовании ткацкого станка типа Жаккард, снабженного такой трехпозиционной ремизоподъемной кареткой. 3 н. и 7 з.п. ф-лы, 4 ил.
Комментарии