Устройство для контроля сорных примесей в пробе волокнистого материала - RU2060500C1
Код документа: RU2060500C1
Чертежи










Описание
Изобретение относится к измерению посторонних веществ в пробах волокна.
Известно устройство для контроля сорных примесей в пробе волокнистого материала, содержащее процессор для обработки данных, включающий вычислительный блок, а также взвешивающее устройство для определения в веса пробы, и по меньшей мере один датчик контроля примесей в пробе, электрически соединенные со входами процессора обработки данных.
Недостатком известного устройства является отсутствие информации о размерах, типах или категориях сорных примесей, о способности к очищению, отсутствует информация о том, в какой степени сорные примеси или какая-либо их конкретная разновидность негативно повлияет на данный процесс текстильного производства.
Целью изобретения является устранение указанных недостатков.
С этой целью в устройстве для контроля сорных примесей в пробе волокнистого материала, содержащем процессор для обработки данных, включающий вычислительный блок, а также взвешивающее устройство для определения веса пробы и по меньшей мере один датчик контроля примесей в пробе, электрически соединенные со входами процессора обработки данных, дополнительно содержит сепаратор для отделения волокон от сорных примесей, имеющий выходы для сорных примесей и выход для волокон, по меньшей мере один оптический датчик для волокон сепаратора и соединенный с входом процессора обработки данных, датчик контроля примесей в пробе, установленный на выходе для сорных примесей сепаратора выполнен оптическим, процессор содержит блок памяти, входы которого являются входами процессора, а выход подключен к блоку вычисления количества сорных частиц и количества волокон на единицу веса пробы.
Устройство также содержит средство формирования пряди из пробы волокнистого материала. Оптический датчик контроля примесей в пробе, содержащий источник генерирования светового пучка и фотоприемник, установлен с возможностью пропускания сорных примесей между источником света и фотоприемником в направлении перпендикулярном направлению светового пучка и пересечением его сорными примесями. Оптический датчик примесей в пробе выполнен в виде двух детекторов света, рабочие оси первого детектора и второго детектора, определяющего рассеяние света вперед, расположены перпендикулярно направлению перемещения сорных частиц, выходы оптических детекторов света являются выходами датчика контроля примесей в пробе, и вычислительный блок выполнен с возможностью вычисления дополнительно величины проецируемого эффективного диаметра каждой сорной частицы.
Оптический датчик примесей в пробе выполнен в виде двух детекторов света, рабочая ось первого детектора света, расположена перпендикулярно направлению перемещения сорных частиц, а рабочая ось второго детектора света с фокусирующими линзами, определяющего рассеяние света назад, расположена под углом к направлению перемещения сорных частиц, выходы оптических детекторов света, являются выходами датчика контроля примесей в пробе, а вычислительный блок выполнен с возможностью вычисления дополнительно величины проецируемого эффективного диаметра каждой сорной частицы.
Угол между рабочими осями первого и второго детекторов света составляет 40о.
На фиг.1 изображена блок-схема устройства для контроля сорных примесей; на фиг. 2 малая сорная частица и датчик; на фиг.3 крупная сорная частица и датчик; на фиг.4 сорная частица, вид сбоку; на фиг.5 то же, план; на фиг.6 то же, вид спереди; на фиг.7 график, у которого по оси Y отложена вероятность, а по оси Х нормализованная проецируемая площадь сорной частицы; на фиг.8 график, где на оси Х отложен диаметр сорной частицы, на оси Y напряжение, получаемое при проходе частицы перед датчиком; I размеры сорных частиц, мкм; II размеры стеклянных шариков, мкм; на фиг.9 график, на котором показана информация, аналогичная той, что представлена на фиг.8; на фиг.10 и 11 график и таблица соответственно, на которых показана корреляция между проецируемой площадью на грамм при замере согласно изобретению и определенной вручную процентной долей видимого постороннего вещества; на фиг.12 и 13 соответственно таблица и график (пример типовой выходной информации, получаемой от устройства; на фиг. 14 вариант осуществления с использованием видеокамеры, просматривающей тонкий волоконный слой с сорными примесями.
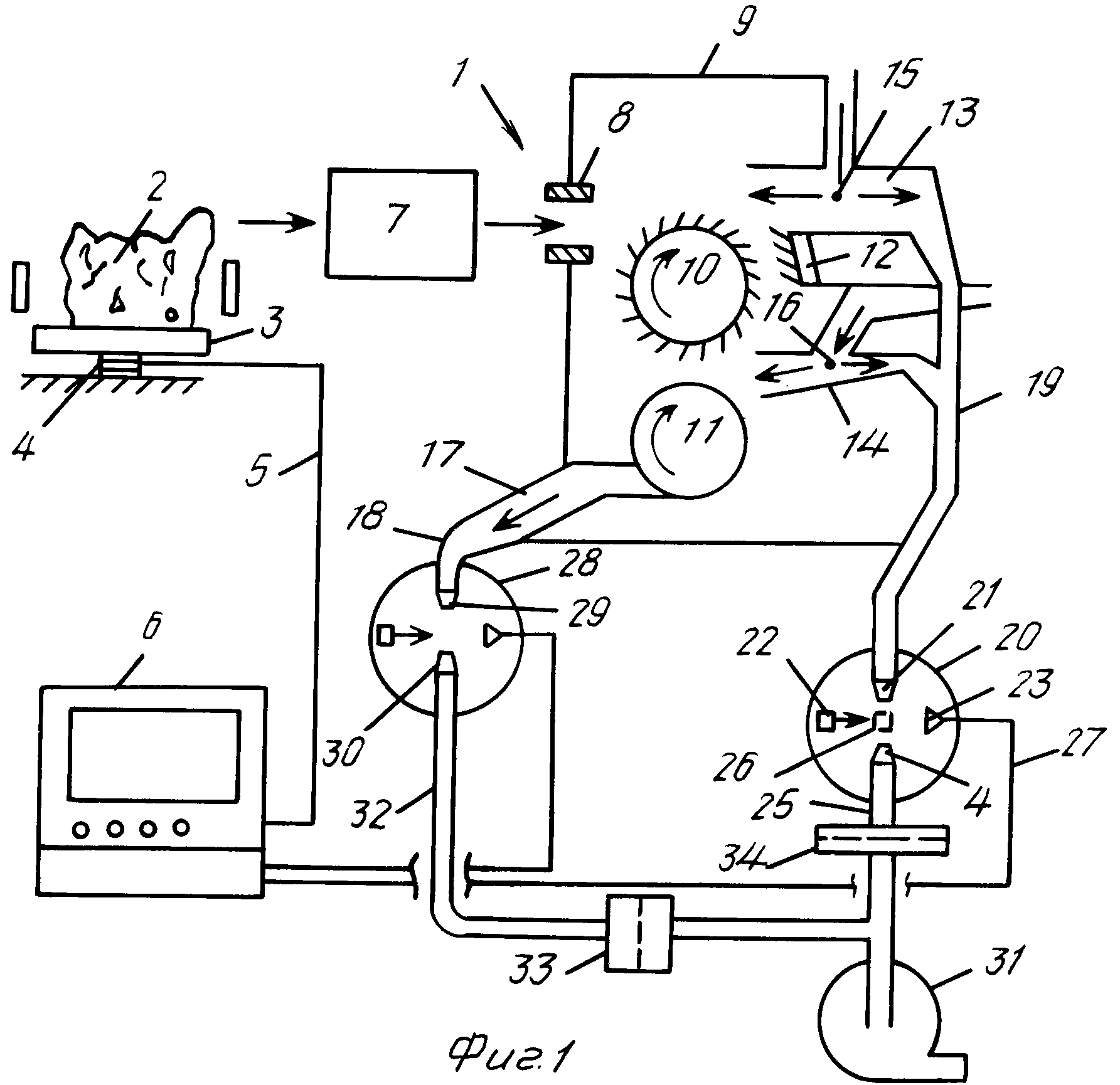
На фиг.1 изображено устройство 1 для контроля сорных примесей в пробе 2 волокна, где содержится как волокно, так и примеси. Вначале пробу помещают на весы 3, при этом преобразователь 4, чувствительный к давлению (или к весу), вырабатывает в линии 5 сигнал, соответствующий весу пробы. Сигнал в линии 5 передается в компьютер 6, где имеются соответствующие аналого-цифровые преобразователи, на которые и поступает аналоговый сигнал веса. Компьютер 6 по сигналу, поступающему по линии 5, рассчитывает и запоминает вес пробы.
Затем проба вручную или с помощью механического приспособления 7 формируется в удлиненную конфигурацию, называемую прядью, которая по каналу 8 подается в сепаратор 9. Там проба волокна входит в контакт с сепараторными барабанами 10 и 11 и чесальными шляпками 12, а также другими известными элементами, которые отделяют волокна от сорных примесей. Примеси собираются в каналах 13 и 14, внутри которых существуют воздушные потоки, идущие к барабанам 10 и 11 в направлении, противоположном движению частиц, поступающих в каналы 13 и 14.
Подобные воздушные потоки обычно называют противотоками, а канал называют противоточным. Воздушный противоток возвращает назад волокна, втянутые в каналы 13 и 14, однако скорость сорных частиц оказывается достаточной, чтобы преодолеть противоток и достичь точек поворота 15 и 16, откуда сорные частицы увлекаются воздушным потоком в каналы 13 и 14 в направлении, противоположном движению противотока. Точки поворота представляют собой небольшие объемы пространства внутри каналов, откуда сорные частицы либо возвращаются назад к барабанам 10, 11, либо уносятся от них. Размер уносимых сорных частиц можно регулировать.
В канале 17 собирается линт (пух), откуда он подается к каналу 18, где за счет разрешения создается воздушный поток. Аналогичный воздушный поток создается внутри канала 19, куда сорные частицы увлекаются из каналов 13 и 14. Сепаратор 9 сконструирован таким образом, чтобы все сорные частицы отделялись от волокон и сразу поступали в канал 19, тогда как все волокна сразу подаются в канал 18. Наиболее предпочтительна аэромеханическая сепарация частиц сорных примесей от волокон с подачей их в различные воздушные потоки, однако объекты, образующие пробу 2, могут не только разделяться механически, но и совместно подаваться в едином воздушном потоке, а затем разделяться на типы или категории с помощью оптического средства. Иными словами, эти объекты можно разделять на категории сорных примесей и волокна с помощью оптических средств.
По каналу 19 сорные частицы подаются к оптическому датчику 20, куда они поступают через сопло 21 и проходят через свет, создаваемый источником света 22, в результате чего они обнаруживаются фотоприемником 23. Затем частицы собираются всасывающим соплом 24 и увлекаются всасывающим воздушным потоком в канал 25. По мере того, как сорные частицы поступают к датчику 20, они проходят через чувствительный объем 26, где присутствуют при случайной ориентации. Т. е. хотя сопло 21 ускоряет частицы, а сопло 24 их замедляет, однако они сконструированы так, что частицы присутствуют внутри чувствительного объема 26 при практически случайной ориентации.
По восприятии света датчик 23 передает в линию 27 сигнал напряжения, откуда он поступает в компьютер 6, где имеются соответствующие аналого-цифровые преобразователи, принимающие и преобразующие этот сигнал. В соответствии с предпочтительным вариантом реализации датчик 23 и источник света 22 сконструированы так, чтобы обнаруживать ослабление света, возникающее при прохождении сорной частицы через чувствительный объем. Также можно воспользоваться рассеянием света и его различными сочетаниями. Хотя предпочтительный вариант реализации рассматривается прежде всего в случае обнаружения ослабления света, однако датчик 23 может представлять собой комбинированный детектор, обнаруживающий рассеяние света вперед, рассеяние света назад и его ослабление, возникающее при прохождении частиц через чувствительный объем 26.
В канале 18 предусмотрен аналогичный электрооптический датчик 28, воспринимающий оптические характеристики волокон во время прохода через датчик 28. При использовании такой конструкции можно подавать в нее одиночную пробу и получать различную информацию по волокнам и сорным примесям. Датчики 28 и 20 практически одинаковы за тем исключением, что датчик 28 содержит нагнетающее сопло 29 и всасывающее сопло 30, сконструированные таким образом, чтобы правильно сориентировать волокно при его проходе через датчик 28. Возможность правильной ориентации волокна весьма полезна при проведении его измерений, однако она не является абсолютно обязательной, что же касается сорных примесей, то необходимость их строгой угловой ориентации до входа в чувствительный объем 26 отсутствует. Желательно, чтобы сорные примеси присутствовали при случайной ориентации.
Вакуумный насос 31, соединяющийся с датчиком 20 через канал 25, с датчиком 28 через канал 32, обеспечивает всасывание или вакуум, необходимый для создания воздушного потока. В канале 25 перед насосом 31 размещен фильтр 34, где собираются частицы сорных примесей, и кроме того, в канале 32 размещен фильтр 33, где собираются все волокна. Полученные от пробы волокна и сорные примеси можно отдельно извлечь из фильтров 34 и 43 и подвергнуть ручному анализу, например взвесить на весах 3. Ручной анализ производится в первую очередь для калибровки инструмента, связанной с замерами и вычислениями, производимыми на основе выходных сигналов от датчиков 20 и 28, а также для проверки оптических измерений и для их дополнения.
На фиг. 2 изображена небольшая сорная частица 35, приближающаяся к оптическому датчику 23. Площадь частицы существенно меньше ширины датчика, поэтому во время прохода частицы перед датчиком она вызовет ослабление света, которое будет связано с проецируемой площадью этой частицы.
На фиг.3 изображена крупная частица 36, приближающаяся к оптическому датчику 23. Когда частица 36 пройдет перед датчиком 23, то оно перекроет его, поэтому количество света, поглощенного частицей 36, которое могло бы попасть на датчик 23, будет пропорционально эффективному диаметру частицы.
Сборные частицы 37 (фиг.4-6) имеют аналогичную форму и потому их вид или представление будет зависеть от того, как будет сориентирована подобная частица или чешуйка при прохождении перед датчиком. Поэтому получаемая от датчика 20 информация и особенно данные, связанные с ослаблением света, будут иметь ограниченную полезность.
На фиг.7 изображен график, на котором представлена вероятность того, что сорная частица вроде чешуйки 37 предстанет при нормализованной или перпендикулярной ориентации вроде той, что показана на фиг.5. Из кривой 38 видна вероятность различной ориентации сорной частицы при ее свободном вращении вокруг одной оси, и можно заранее прогнозировать, что нормальная проекция такой частицы будет существовать чуть больше 14% времени. Вместе с тем можно прогнозировать, что проекция в одну десятую нормализованной проецированной площади будет существовать лишь приблизительно 3% времени.
Если сорная частица может свободно вращаться по двум перпендикулярным осям, то из кривой 39 видно, что нормальная проекция сорной частицы 37 согласно прогнозу займет менее 2% времени, тогда как проекция приблизительно 10% от нормализованной проецируемой площади согласно прогнозу составит приблизительно 9% времени. Аналогичным образом проекция в 15% от нормализованной проецируемой площади займет приблизительно 7,5% времени, тогда как проекция в 200% займет приблизительно 7% времени.
На основании кривой 39, построенной для случая случайной ориентации сорной частицы, можно сделать вывод о том, что частица будет редко видна в нормальной проекции. Отсюда вывод, что в сигнале, получаемом с выхода оптического датчика при случайной ориентации сорных частиц, будет содержаться мало полезной информации об их размере, поскольку вероятность нормального падения света на частицу мала.
Однако из результатов, представленных на фиг.8, видна хорошая корреляция выходного сигнала датчика 23 с эффективным диаметром частицы и следовательно хорошая корреляция с проецируемой площадью. На фиг.8 по оси Y отложены средние значения пиковых напряжений от датчика 23, а по оси Х диаметр частицы. Определение действительного эффективного диаметра частиц осуществлялось вручную пропусканием частиц через сита с постепенно уменьшающимися ячейками. Кружками графически изображена информация, полученная по стеклянным шарикам, имеющим форму сферы, а ромбиками информация по сорным частицам. Из графиков видно, что среднее значение пиковых напряжений хорошо коррелируется с диаметром как сорных частиц, так и стеклянных шариков. (Изображенные на фиг.8 сигналы напряжения на самом деле снимаются с двух усилителей, причем коэффициент усиления у более чувствительного каскада в 2,5 раза больше, чем у другого. Отсчеты нормализованы для каскада с большим коэффициентом усиления. Необходимость в двух каскадах связана с потребностью перекрыть большой динамический диапазон).
Показанные на фиг.9 участки кривых 40 и 41 аналогичны кривым на фиг.8. Из фиг.9 видно, что функциональная взаимосвязь между выходными сигналами датчика 23 и размерами частиц является различной для мелких и для крупных частиц. Если частицы малы, то связь между выходным напряжением (V) датчика 23 и размером частицы описывается уравнением V a + bX + cX2, где Х размер частицы в одном измерении, например, ее эффективный диметр. Так, для хлопковых сорных частиц размером менее 488 мкм взаимосвязь можно описать таким уравнением: V 0,0000303Х2 + 0,00475Х 0,0403. Если частицы крупные, то взаимосвязь описывается уравнением в виде V mХ + b. В частности, для хлопковых сорных частиц диаметром более 488 мкм такая взаимосвязь описывается следующей формулой: V 0,0313Х- 5,78.
Прохождение отдельных сорных частиц типа тех, что изображены на фиг.2-6 через оптический датчик 20, приводит к появлению в линиях 27 сигналов. Компьютер 6 по меньшей мере подсчитывает сигналы, представляющие сорные частицы, и в сочетании с весом пробы вырабатывает новый информационный продукт в виде количества частиц на грамм пробы.
Однако, в сигналах, поступающих по линиям 27, кроме того содержится информация по размерам, форме и ориентации сорных частиц. Подобную детальную электрооптическую информацию можно использовать для определения веса каждой частицы. Так, чтобы найти суммарный вес сорных частиц, можно перемножить найденные количества на грамм в каждом специфичном размером диапазоне и просуммировать все размерные диапазоны. Если разделить на вес пробы, то можно прогнозировать содержание видимых веществ в процентах.
На фиг.8 и 9 представлены необходимые и достаточные калибровочные результаты по пробам с известными размерами, формами и составом. В калибровку также входит информация по ориентации.
Первый этап измерения неизвестной пробы заключается в вычислении эффективного диаметра D для каждого сигнала напряжения от сорной частицы. В частности, компьютер 6 пользуется выходным сигналом датчика 20 для вычисления одномерного размерного критерия D (эффективный диаметр) для каждой частицы. Пусть к примеру из фиг.8 или 9 найдем, что пиковое напряжение в 9,5 В соответствует в среднем частицам с эффективным диаметром D 488 кмк. В среднее значение входят все эффекты, связанные с размером, формой, составом и ориентацией. Преобразование напряжения в эффективный диаметр D (фиг.8) производится компьютером с помощью справочной таблицы или квадратного и линейного уравнений.
Второй этап заключается в вычислении электрооптических единиц согласно определению: электрооптические единицы (D/1000)2.
Тем самым для каждой сорной частицы осуществляется интерпретация проецируемой площади в квадратных миллиметрах. Третий этап заключается в суммировании вкладов от электрооптических единиц для всех частиц в пробе.
На фиг. 10а по оси Y отложен гравиметрический вес видимых посторонних веществ в процентах, представлены сорные частицы, уловленные фильтром 34.
По оси Х отложены электрооптические единицы (Е-О), при этом прослеживается хорошая корреляция с весом видимых посторонних веществ в широком диапазоне измерений. Представленный результат подтверждает предположение о том, что вес сорных частиц пропорционален их электрооптическим единицам. И наконец суммарное количество электрооптических единиц на грамм имеет интуитивно удовлетворительную интерпретацию, а именно суммарные электрооптические единицы в квадратных миллиметрах представляют проецируемую площадь сорных частиц, удаленных из одного грамма пробы.
На фиг. 12 представлена типовая выходная информация для пяти повторных проб хлопкового волокна: в первом столбце номер пробы или номер повтора; в столбце вес пробы указан вес исходной хлопковой пробы, в столбце "Итоговая сумма" количество сорных частиц на грамм исходной пробы; далее в столбце "средний размер" средний эффективный диаметр всех сорных частиц для каждой пробы в микрометрах; затем в столбце "Пыль" информация о количестве на грамм. Чтобы найти это количество, компьютер подсчитывает, сколько всего имеется частиц меньше некоторого размера (когда выходное напряжение датчика меньше некоторого порога) и делит найденное число на суммарный вес исходной пробы в граммах. В столбце примеси указано, сколько частиц на грамм имеют размеры больше заранее определенной величины (когда выходное напряжение датчика больше порогового значения). В случае хлопка частицы размером в среднем менее 500 мкм обычно рассматривают как пыль, а частицы больших размеров как сорные примеси.
Следовательно, выходной сигнал указывает как на наличие пыли, так и сорных частиц. Однако термин "сорные частицы" означает вообще любое неволоконное вещество, имеющееся в пробе, и потому в него включаются и понятия пыли, и понятия сора. В последнем столбце представлено расчетное процентное содержание видимых посторонних веществ (ВПВ), представляющее единицу измерения количества сорных примесей в хлопковых волокнах. Расчеты проводились на основе описанных электрооптических единиц.
Три последних числа в каждой колонке представляют среднее от пяти повторов, стандартное отклонение и CV в процентах.
На фиг. 13 показано, как данные выводятся на экран, при этом изображены два графика, где по оси Х отложены количества частиц на грамм, а по оси Y размер частиц (эффективный диаметр). Для первого графика, находящегося в левом верхнем углу, используются шкалы, изображенные с левой и верхней стороны графика. Для второго графика, находящегося в нижнем углу, используются шкалы, изображенные с нижней и правой стороны экрана. На графиках представлено размерное распределение сорных частиц в пробе волокон, однако приведенная информация была нормализована для каждого размера по количеству на грамм пробы. В верхнем правом углу изображен квадрат, представляющий электрооптические единицы, которые представляют проецируемую площадь сорных примесей в пробе.
Подобный вывод информации приведен в качестве примера вывода данных из устройства, при этом количество частиц на грамм было приведено как для всей пробы, так и для различных категорий сора, а именно для размерных категорий. Аналогичным образом подсчет количества сора на грамм можно выполнять и для других категорий или типов сорных примесей или пробы. К примеру, на компьютер также поступают электрооптические данные от датчика 28 чистых волокон, при этом электрооптическим образом определяется количество и вес. Следовательно, устройство 1 способно вывести количества сорных примесей на количество чистых волокон или количество примесей на грамм чистых волокон, что является различными вариантами вывода выходной информации.
На фиг.12 показан пример, где волокна 42 и сорные примеси 43 присутствуют в тонкопланарном формате. При этом волокна и сорные частицы должны быть в достаточной степени рассеяны с тем, чтобы можно было идентифицировать сорную частицу, а чтобы просмотровая камера смогла увидать все сорные частицы в чувствительном объеме, волоконный слой должен быть достаточно тонким. В данном варианте реализации чувствительный объем ограничивается площадью пробы 44, просматриваемой камерой 45, и глубиной пробы, при этом камера видит практически все сорные частицы в чувствительном объеме, представленном в пробе. От камеры должна поступать информация об изображении, охватывающая как видимый участок спектра, так и за его пределами. В частности, предусматриваются средства для работы в ближней инфракрасной области, а также средства для получения изображений при свете самой различной длины. Для освещения используется один или несколько источников света 46, находящихся над пробой, а также один или несколько источников света 47 под пробой. В этом случае применяются типовые методы цифрового анализа изображений, которые позволяют идентифицировать все объекты, геометрическая конфигурация и проецируемая площадь достаточны, чтобы представлять сорные примеси. Узелки тоже обычно соответствуют этим критериям, и потому приходится анализировать все встреченные объекты, чтобы отклонить блестящие или матовые узелки. Как только узелки отбрасываются, производится подсчет всех оставшихся объектов, и компьютер определяет проецируемую площадь каждой частицы, подсчитывая отдельные элементы изображения (пиксели), занимаемые сорными частицами 43. По завершении подсчета количества и нахождения проецируемой площади можно рассчитывать другую требуемую информацию по изложенной методике.
Кроме того, получая новый информационный продукт в виде количества сорных частиц на грамм пробы, также можно электрооптически найти вес волоконный пробы с помощью датчика волокна 28.
Реферат
Использование: изобретение относится к устройствам для контроля посторонних веществ в пробах волокна. Сущность изобретения: устройство для контроля сорных примесей в пробе, состоящей из волокон и сорных частиц, содержит весы для определения веса пробы, который передается в компьютер. Затем проба подается в чувствительный объем, и оптический датчик вырабатывает выходной сигнал, соответствующий по меньшей мере наличие сорной частицы в чувствительном объеме. В первом варианте реализации изобретения выходной сигнал представляет ослабление света, возникающее из-за наличия частицы в чувстительном объеме. Во втором варианте реализации осуществляется анализ изображения сорных частиц, присутствующих в чувствительном объеме, в результате получается выходной сигнал, соответствующий размерам, форме или составу частиц. Весовая информация вместе с выходным сигналом оптического датчика подается в компьютер, который вырабатывает выходную информацию в виде количества по меньшей мере некоторой доли сорных частиц на единицу веса пробы. Компьютер также выводит информацию в виде эффективного диаметра, проецируемой площади и веса сорных частиц и количества и веса волокон или соответствующей им информации. В частности компьютер классифицирует сорные частицы и выводит информацию по конкретной категории частиц. 1 с. п., 5 з. п. ф-лы, 14 ил.