Способ управления работой микроволновой печи - RU2125683C1
Код документа: RU2125683C1
Чертежи
Описание
Изобретение относится к технике пищевой промышленности и может быть использовано для термической обработки пищевых продуктов.
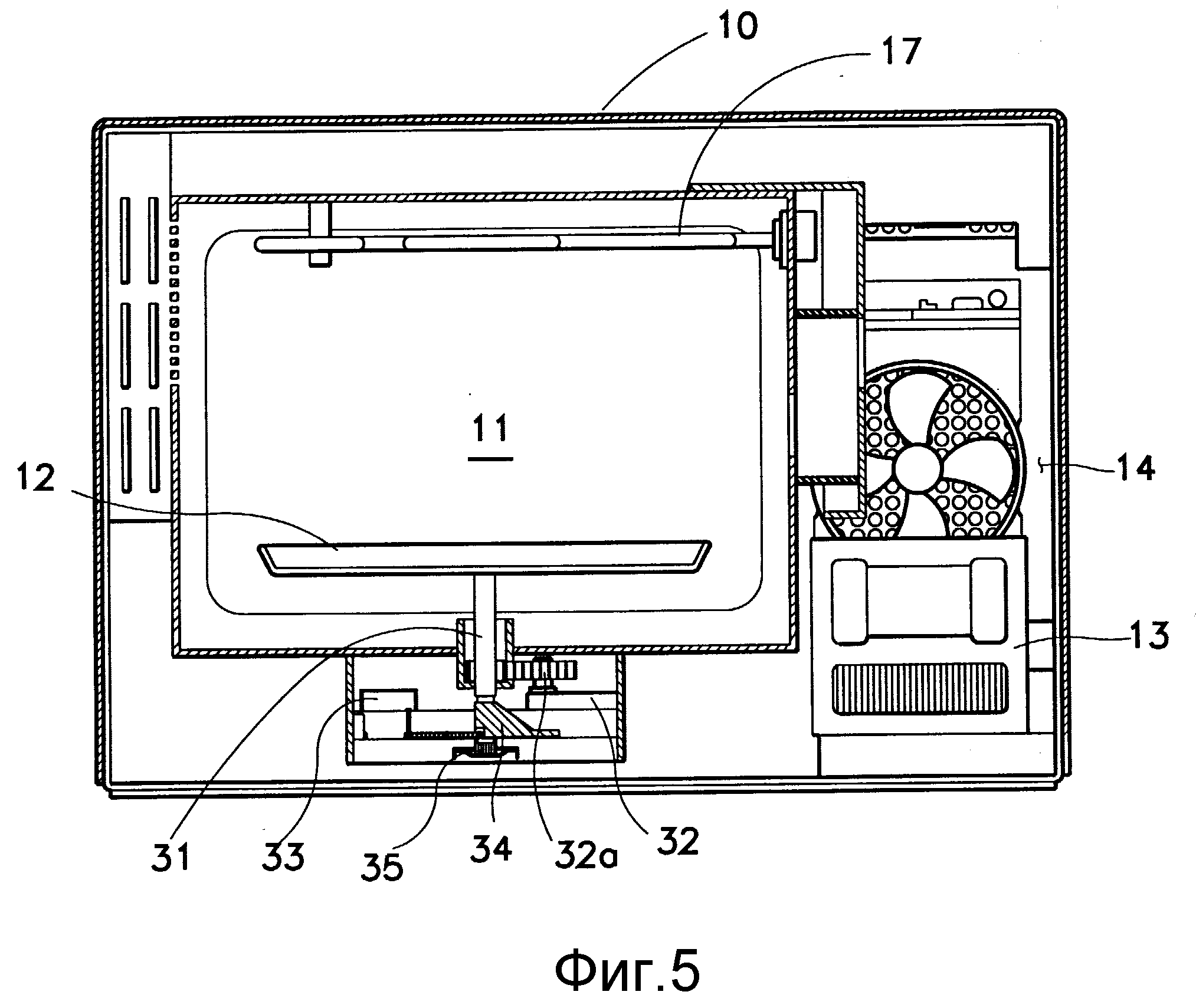
Наиболее близким к рассматриваемому изобретению является способ управления работой микроволновой печи, использующей микроволны и тепло, в которой пищу готовят на лотке, при этом осуществляют подъем лотка и его вращение (SU 223956, F 24 C 7/02, 1968).
В ранее известной печи, если вес размещенной на лотке пищи слишком велик для вращения вала и подъема лотка, то двигатель для подъема может быть перегружен, что может вызвать неправильную работу микроволновой печи и выход ее из строя.
Поэтому в основу настоящего изобретения положена задача создания способа управления работой микроволновой печи, в которой блок определения веса определяет вес пищи, размещенной на лотке, определяет, превышает ли этот вес заранее определенный вес, что обеспечивает соответствующее управление подъемом и/или вращением лотка, тем самым предотвращая неправильную работу печи из-за перегрузки устройств подъема и вращения лотка, а также блока определения веса.
Поставленная задача решается тем, что в способе управления работой микроволновой печи, использующей микроволны и тепло, в которой приготовляют пищу на лотке, включающем подъем лотка и его вращение, вращение лотка осуществляют путем включения устройства вращения во время приема сигнала начала работы, определяют вес пищи, помещенной на лоток, сравнивают вес пищи с заранее определенным предельным весом, при этом если вес пищи меньше, чем предельный вес, то поднимают лоток вверх на заранее определенную высоту, после того как запускают подъемное устройство, а если вес пищи превышает предельный вес, то выключают подъемное устройство.
Кроме того, в рассматриваемом способе могут сравнивать вес пищи с заранее определенным максимально допустимым весом, если вес пищи превышает предельный вес, и выключить устройство подъема и устройство вращения, а также указать на возникновение ошибки, если вес пищи превышает максимально допустимый вес. В рассматриваемом способе величина максимально допустимого веса может быть установлена больше величины предельного веса. В рассматриваемом способе процесс приготовления пищи может быть осуществлен без поднятия лотка, если вес пищи находится между предельным весом и максимально допустимым весом.
В дальнейшем изобретение поясняется конкретными чертежами.
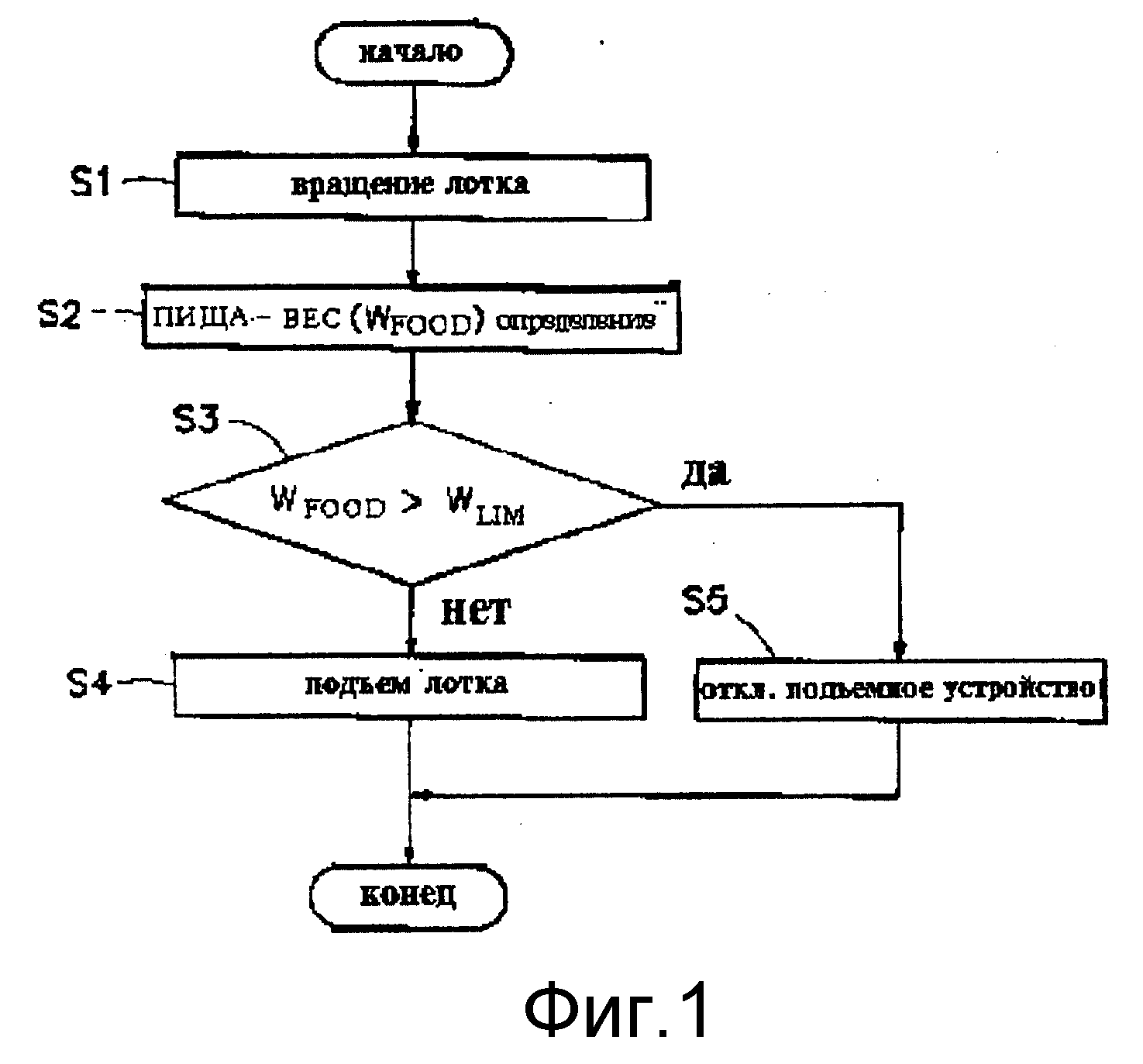
Фиг. 1 изображает последовательность операций, показывающую
способ управления работой микроволновой печи в соответствии с первым исполнением настоящего изобретения;
на фиг. 2 показан вид спереди на поперечное сечение микроволновой печи в соответствии
с первым исполнением настоящего изобретения;
на фиг. 3 показана схематичная диаграмма системы управления микроволновой печи в соответствии с первым исполнением настоящего изобретения;
фиг. 4 изображает последовательность операций, показывающую способ управления работой микроволновой печи в соответствии с другим исполнением настоящего изобретения; а
фиг. 5 является видом
спереди на поперечное сечение ранее известной микроволновой печи.
Предпочтительные исполнения настоящего изобретения будут описаны детально со ссылкой на сопутствующие чертежи.
Ниже дано описание работы настоящего изобретения со ссылкой на фиг. 1. В описанной выше микроволновой печи вначале осуществляют вращение лотка путем включения устройства вращения после приема сигнала начала работы (S1). Затем определяют вес пищи, помещенной на лоток (S2). После этого вес пищи Wfood сравнивают с заранее определенным пределом веса Wlim для определения, больше ли Wfood ,чем Wlim (S3). Если вес пищевого продукта Wfood меньше, чем предел веса Wlim на шаге S3, то лоток поднимается на заранее определенный уровень подъемным устройством (S4), но если вес пищи Wfood превышает предел веса Wlim , то подъемное устройство отключается (S5).
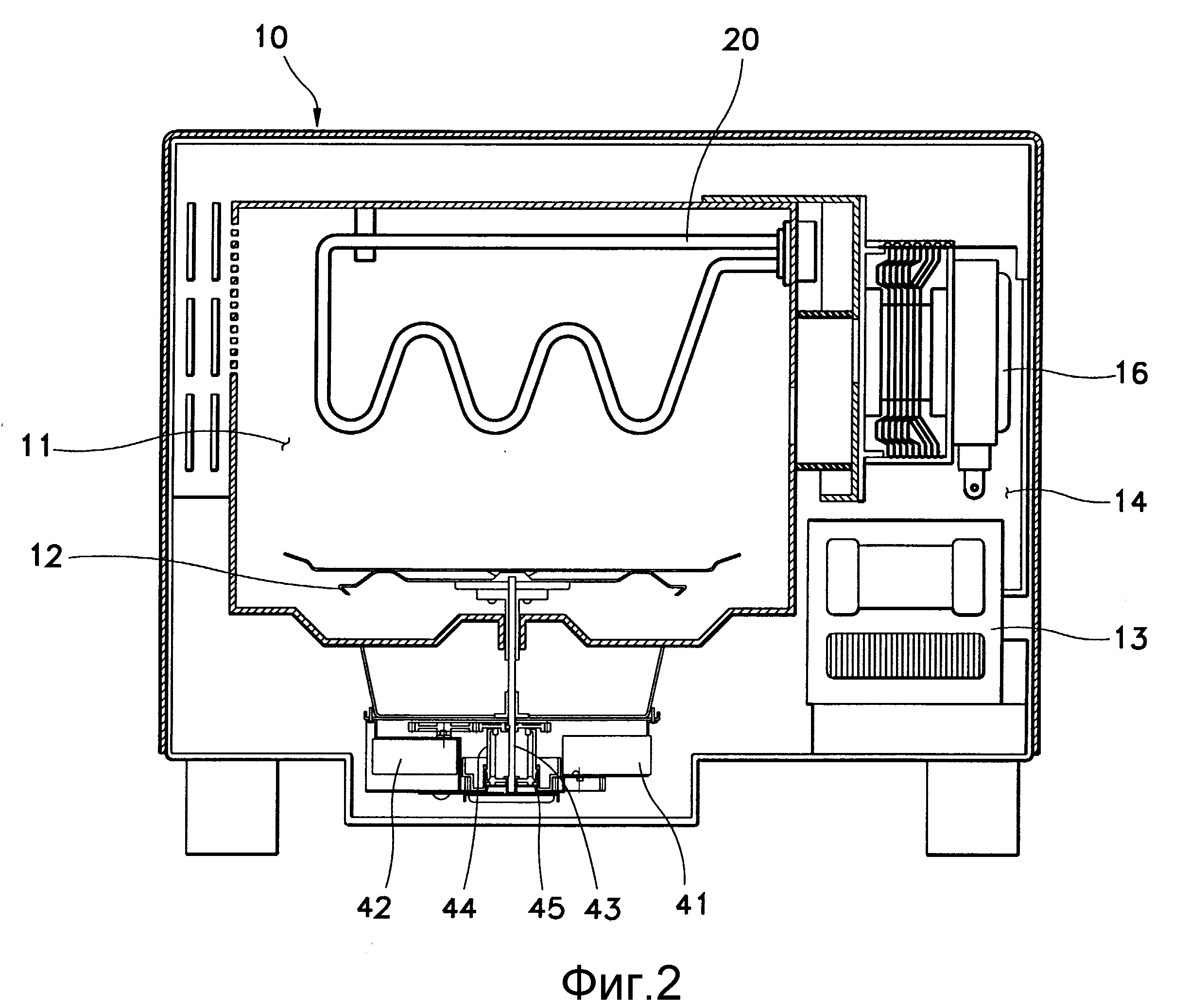
На фиг. 2 показан вид спереди на поперечное сечение микроволновой печи в соответствии с первым исполнением настоящего изобретения, на фиг. 3 показана схематичная диаграмма системы управления микроволновой печи в соответствии с первым исполнением настоящего изобретения, а фиг. 4 является последовательностью операций, показывающей способ управления работой микроволновой печи в соответствии со вторым исполнением настоящего изобретения.
Как показано на фиг. 2, микроволновая печь в соответствии с настоящим изобретением имеет камеру для готовки 11, магнетрон 16, размещенный в камере электрических компонент 14 для излучения микроволн в камеру для готовки 11, высоковольтный трансформатор 13, который осуществляет питание магнетрона 16, нагреватель 20, смонтированный в верхней части камеры для готовки 11, при помощи которого осуществляется приготовление пищи посредством излучаемого и конвекционного тепла, вращающийся лоток 12, имеющийся на дне камеры для готовки 11, который принимает пищу и который предназначен для поднятия или опускания, вал 43, верхний конец которого связан с центром нижней части лотка 12, а его нижний конец выступает из нижней части камеры для готовки 11, вращающий двигатель 42, который сообщает вращающий момент вращающей шестеренке для вращения вала 43 и тем самым вращает лоток 12, часть направляющая подъем 44, расположенная под валом 42, двигатель для подъема 41, который приводит в движение часть, направляющую подъем 44 для подъема вала 43, а также блок определения веса 45, расположенный под частью, направляющей подъем 44, который измеряет вес пищи, помещаемой на лоток 12, путем определения давления, приложенного к валу 43, когда вал 43 и лоток 12 расположены в своей самой нижней позиции.
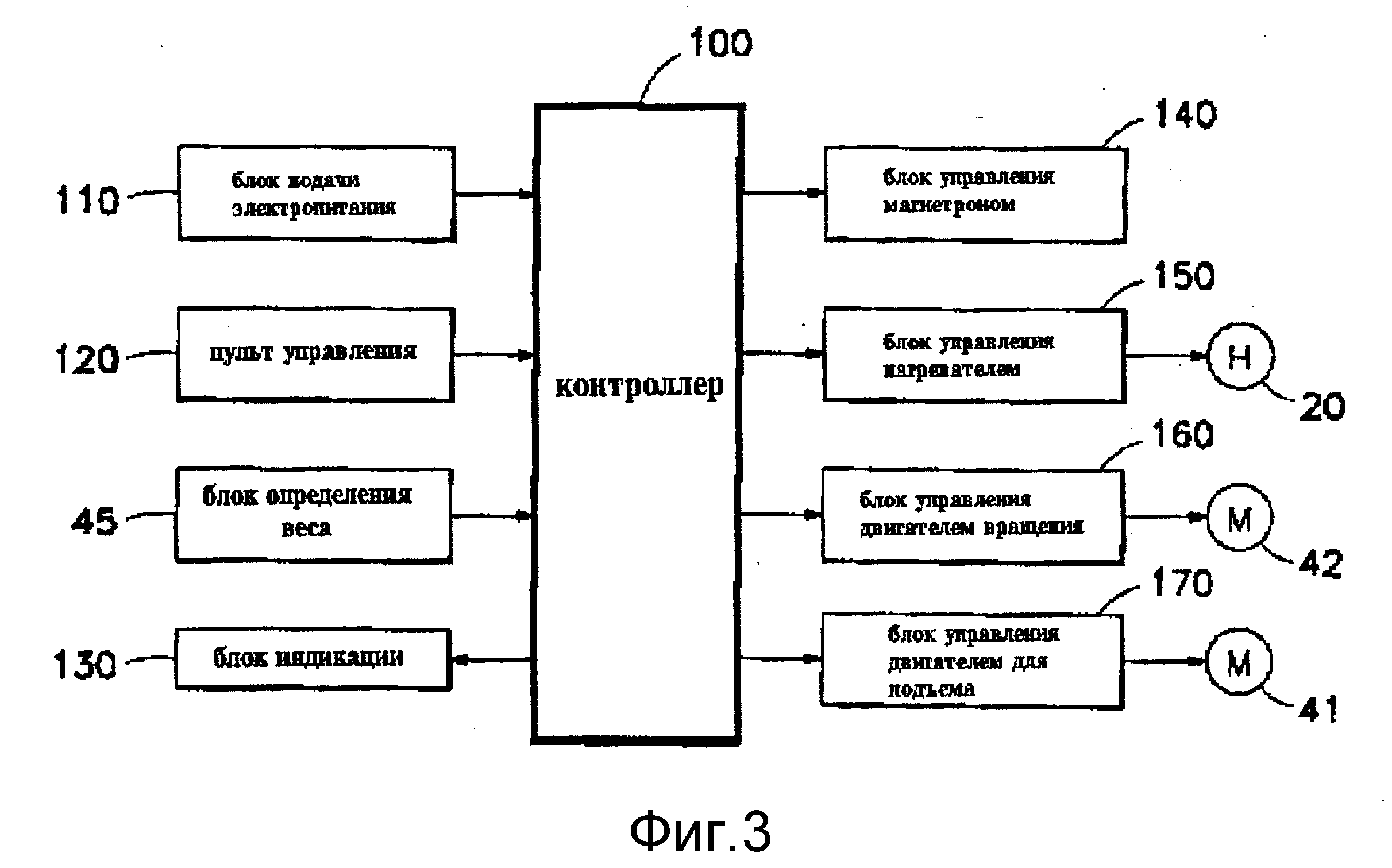
Система управления микроволновой печи в соответствии с настоящим изобретением показана на фиг. 3.
Она включает контроллер 100, который управляет всей работой микроволновой печи с момента начала до момента завершения приготовления пищи, блок подачи электропитания 110, который подает электропитание на контроллер 100, пульт управления 120, используемый для ввода необходимого режима и длительности обработки пищи, блок индикации 130, который отображает состояние печи и условия приготовления пищи в течение работы, блок управления нагревателем 150, который управляет работой нагревателя 20, блок управления магнетроном 140, который управляет работой магнетрона 16, блок управления двигателем для подъема 170, который управляет работой двигателя для подъема 41, который поднимает лоток 12 под управлением контроллера 100; блок управления вращающим двигателем 160, который управляет работой вращающего двигателя 42, который вращает лоток 12, а также блок определения веса 45 для определения веса пищи, помещенной на лоток 12.
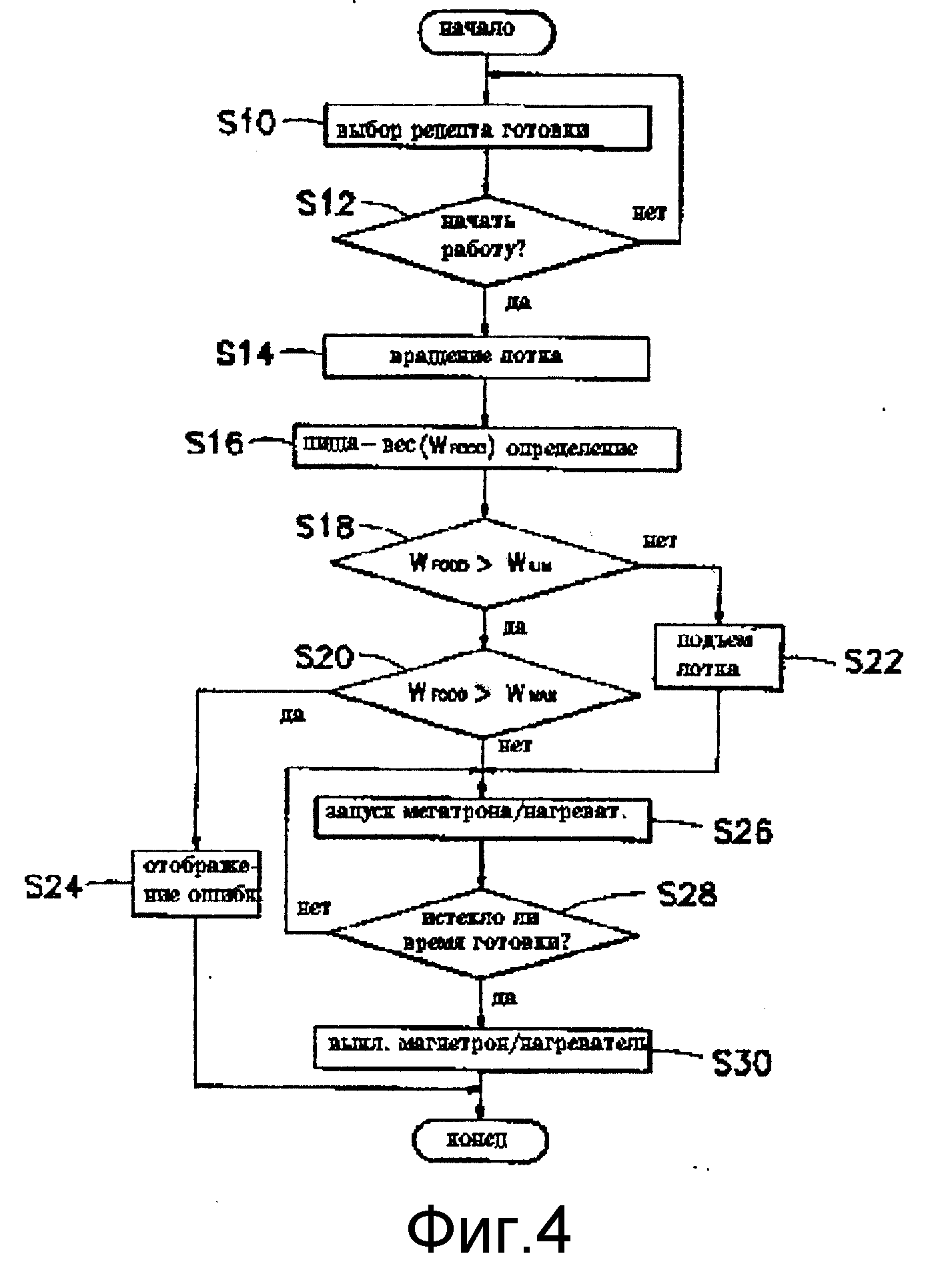
Далее будет описан способ управления работой микроволновой печи второго исполнения настоящего изобретения со ссылкой на фиг. 4. Этот способ содержит шаги:
помещают пищу на лоток 12 и подают электропитание на микроволновую печь с последующим выбором необходимого режима приготовления пищи (S10);
определяют, началась ли работа после введения
сигнала начала работы с пульта управления 120 (S12);
передают сигнал управления на блок управления вращающим двигателем 160, который управляет вращающим двигателем 42, осуществляя вращение
лотка 12 (S14);
определяют вес пищи Wfood на основании разности между частотами выходных сигналов от блока определения веса 45 перед и после помещения пищи на лотке 12 (S16);
осуществляют сравнение веса пищи Wfood, определенного на шаге S16 с заранее определенным пределом веса Wlim для определения, больше ли Wfood , чем Wlim
(S18);
осуществляют сравнение веса пищи Wfood заранее определенным максимально возможным весом Wmax для определения больше или Wfood чем Wmax,
если вес пищи Wfood превышает предел веса Wlim (S20);
осуществляют сравнение веса пищи Wfood с заранее определенным максимально возможным весом Wmax
для определения больше ли Wfood, чем Wmax, если вес пищи Wfood превышает предел веса Wlim (S20);
осуществляют подъем лотка 12 на соответствующую
высоту путем расчета высоты на основании рецепта приготовления и веса пищи Wfood, определенного на шаге S16 посредством программы, введенной в контроллер 100, если вес пищи Wfood
меньше предела веса Wlim (S22);
осуществляют индикацию ошибки для указания пользователю о возникновении ошибки для предотвращения воздействия давления, превышающего допустимый вес,
на блок определения веса 45, если вес пищи Wfood превышает максимально допустимый вес Wmax (S24);
запускают магнетрон 16 и нагреватель 20, но вращение лотка выполняется
только в том случае, если вес пищи Wfood меньше, чем максимально допустимый вес Wmax, или после завершения шага S22 (S26);
определяют, истекло ли время, необходимое на
приготовление пищи, и если оно не истекло, то возвращаются к шагу S26, если время готовки не дошло до 28, и отключают магнетрон 16 и нагреватель 20, если время, необходимое для приготовления пищи,
истекло (S30).
Ниже дается описание работы предлагаемой микроволновой печи.
Как показано на фиг. 2, изобретенная микроволновая печь может быть разделена на камеру для готовки 11, находящуюся внутри шкафа 10, в которой готовится пища, а также на отсек электрических компонент 14, который содержит электрические компоненты печи.
Магнетрон 16, питаемый от высоковольтного трансформатора 13, помещается в отсек электрических компонент 14 и излучает микроволны в камеру приготовления пищи 11. Нагреватель 20, смонтированный в верхней части камеры для готовки 11, осуществляет там приготовление пищи путем воздействия излучаемого и конвекционного тепла.
Вращающийся лоток 12 располагается на дне камеры для приготовления пищи 11, на нем размещается пища, и его можно поднимать и опускать.
Верхний конец вала 43, установленного в вертикальном положении, соединен с центром нижней части лотка 12, а его нижний конец выступает из нижней части камеры для готовки 11.
Имеются две шестеренки, связанные друг с другом и расположенные под камерой для готовки 11, одна из них является вращающей шестеренкой, приводимой во вращение вращающим двигателем 42, другая связана с валом 43. Благодаря вращению вращающей шестеренки вращаются другая шестеренка, вал 43 и лоток 12, неотъемлемо связанный с валом 43.
Часть, направляющая подъем 44, приводимая в движение двигателем для подъема 41, размещается под валом 43 и поднимает лоток 12 и вал 43 во время своего движения.
Блок определения веса 45, размещенный под частью, направляющей подъем 44, определяет вес пищи, размещенной на лотке 12, путем определения давления, действующего на вал 43, когда вал 43 и лоток 12 снижены до их самого низкого положения.
Контроллер 100 измеряет вес пищи путем определения разности между частотой исходного выходного сигнала, полученного от блока определения веса 45, и выходного сигнала, получаемого после снижения вала 43 до его самого низкого положения.
Теперь будет описана работа системы управления изобретенной микроволновой печи со ссылкой на фиг. 3.
Контроллер 100 управляет всей работой микроволновой печи с момента начала до момента завершения приготовления пищи, а блок подачи электропитания 110 подает электропитание на контроллер 100. Пульт управления 120 используется для ввода необходимого режима и длительности приготовления пищи, блок индикации 130 отображает состояние микроволновой печи и условия приготовления в течение работы, а блок управления нагревателем 150 управляет работой нагревателя 20. Блок управления магнетроном 140 управляет работой магнетрона 16, блок управления двигателем для подъема 170 управляет работой двигателя для подъема 41, а блок управления вращающим двигателем 160 управляет работой вращающего двигателя 42. Блок определения веса 45 определяет вес пищи, помещенной на лоток 12.
Обратимся к фиг. 4, далее будет описан способ управления работой микроволновой печи в соответствии со вторым вариантом исполнения настоящего изобретения.
Вначале пользователь размещает пищу на лотке 12 и подключает электропитание к микроволновой печи, а затем выбирает необходимый режим приготовления пищи (S10).
Контроллер 100 начинает процедуру обработки после ввода сигнала начала работы с пульта управления 120 (S12).
Затем контроллер 100 передает сигнал управления на блок управления вращающим двигателем 160, который управляет вращающим двигателем 42, вращающим лоток 12 (S14). Так как вал 43 располагается в своем самом низком положении, то давление, соответствующее весу пищи, помещенной на лоток 12, воздействует на блок определения веса 45, который находится под валом 43.
После этого контроллер 100 определяет вес пищи Wfood на основании разности между частотами выходных сигналов, получаемых от блока определения веса 45 до и после помещения пищи на лоток 12 (S16).
Затем контроллер 100 сравнивает вес пищи Wfood, определенный на шаге S16, с заранее определенным пределом веса Wlim для определения, больше ли Wfood, чем Wlim (S18). Например, предел веса Wlim устанавливается равным приблизительно 1,5 кг во время выбора автоматического режима приготовления пищи, оттаивания, подогревания.
Если вес пищи Wfood превышает предел веса Wlim, то контроллер 100 сравнивает вес пищи Wfood с заранее определенным максимально допустимым весом Wmax, который устанавливается больше, чем Wlim для определения, больше ли Wfood, чем Wmax (например 4 кг) (S20).
Если вес пищи Wfood меньше, чем предел веса Wmax на шаге S18, то контроллер 100 запускает двигатель для подъема 41 для осуществления подъема лотка 12 на высоту, соответствующую оптимальному режиму приготовления пищи, рассчитанному программой, введенной в контроллер 100 на основании режима приготовления пищи и веса пищи Wfood (S22).
Если вес пищи Wfood превышает максимально допустимый вес Wmax на шаге S20, то контроллер 100 отображает сообщение, сообщающее пользователю о возникновении ошибки, предотвращая возможную порчу печи весом пищи (S24).
Если вес пищи Wfood меньше, чем максимально допустимый вес Wmax, или после завершения шага S22 выполняется шаг S26, на котором контроллер 100 запускает магнетрон 16 и нагреватель 20, что позволяет, не выполняя поднятия лотка, когда Wfood превышает Wlim, но не превышает Wmax, продолжать приготовление пищи, предотвращая перегрузку вала 43 и двигателя для подъема 41.
После этого контроллер 100 определяет, прошло ли установленное или расчетное время приготовления пищи, и, если нет, то возвращается на шаг S26 (S28).
Если время приготовления пищи истекло, то контроллер 100 выключает магнетрон 16 и нагреватель 20, завершая процесс приготовления пищи (S30).
Таким образом, в соответствии с настоящим изобретением имеется возможность предотвратить непрерывное воздействие избыточного давления на двигатель для подъема и на блок определения веса, тем самым предотвращая неправильную работу микроволновой печи.
Реферат
Изобретение относится к технике пищевой промышленности и может быть использовано для термической обработки пищевых продуктов. В способе управления работой микроволновой печи лоток для помещения пищи не поднимается, если вес пищи превышает заранее определенный эталонный вес, для предотвращения воздействия избыточного давления на подъемное устройство и блок определения веса. Тем самым предотвращается порча или неправильная работа микроволновой печи. В микроволновой печи, имеющей камеру для приготовления пищи, в которой осуществляется приготовление пищи путем воздействия энергии микроволн и тепла, подъемное устройство, которое поднимает лоток, и устройство вращения, которое вращает поднос, способ состоит из шагов: вращения упомянутого лотка путем включения упомянутого устройства вращения в случае приема сигнала начала работы; определения веса пищи, помещенной на упомянутый лоток; сравнения веса пищи с заранее определенным пределом веса; поднятия упомянутого лотка вверх до заранее определенной высоты путем запуска упомянутого устройства подъема, если вес пищи меньше предела веса; а также выключения устройства подъема, если вес пищи превышает предел веса. 3 з.п.ф-лы. 5 ил.
Комментарии