Транспортное средство с возможностью управления фарами и соответствующий способ - RU2680947C2
Код документа: RU2680947C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к фарам транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Некоторые транспортные средства включают в себя адаптивные фары (левую адаптивную фару и правую адаптивную фару). Фары испускают лучи света (т.е. профили луча). Адаптивные фары поворачивают лучи света, когда транспортное средство входит в поворот во время поворота. Необходимо решение для обеспечения удобного управления фарами (и, таким образом, лучами) с помощью дисплея с сенсорным экраном.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Транспортное средство в соответствии с настоящим изобретением включает в себя: фару, которая создает луч, сенсорный экран, камеру, процессор(ы), выполненный(ые) с возможностью: (a) отображения изображений, захватываемых камерой, на сенсорном экране; (b) перестройки луча в соответствии с сенсорными вводами на изображениях; (c) запрещения выполнения пункта (b), когда транспортное средство превышает заданную скорость; (d) перестройки луча путем поворота луча из исходного положения в конечное положение.
Согласно другому аспекту предложен также способ, содержащий этапы, на которых с помощью процессора(ов) транспортного средства, включающего в себя фару, которая создает луч, сенсорный экран и камеру:
(a) отображают изображения, захватываемые камерой, на сенсорном экране;
(b) перестраивают луч в соответствии с сенсорными вводами на изображениях;
(c) запрещают выполнение этапа (b), когда транспортное средство превышает заданную скорость.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0004] Для лучшего понимания изобретения можно обратиться к вариантам осуществления, показанным на следующих далее чертежах. Компоненты на чертежах не обязательно изображены в масштабе, и связанные элементы могут быть пропущены, или в некоторых случаях пропорции могут быть преувеличены, чтобы подчеркнуть и наглядно проиллюстрировать новые признаки, описанные в данном документе. В дополнение, компоненты системы могут быть размещены различным образом, как известно в уровне техники. Дополнительно, на чертежах одинаковые ссылочные позиции обозначают соответствующие части на всех видах.
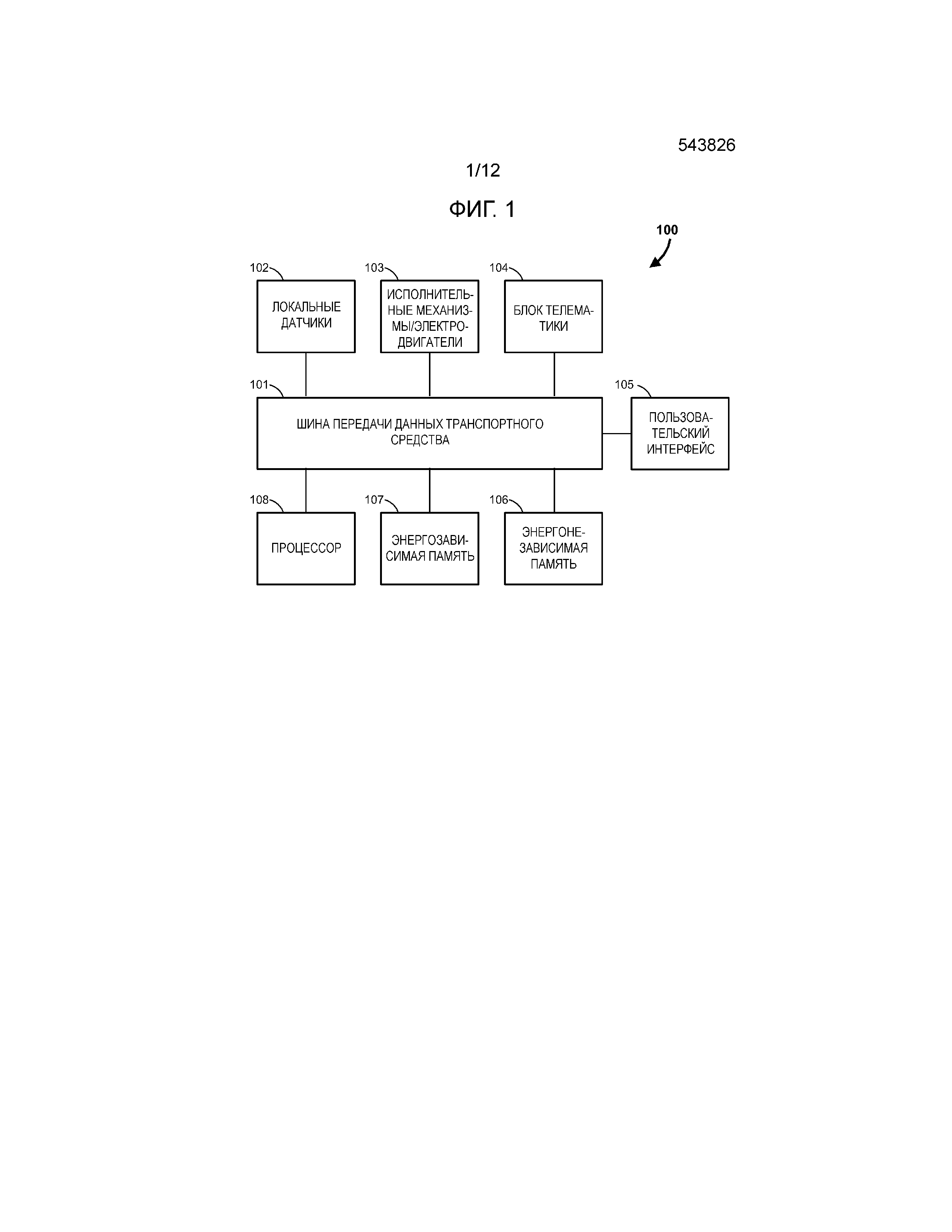
[0005] Фигура 1 представляет собой блок-схему вычислительной системы транспортного средства.
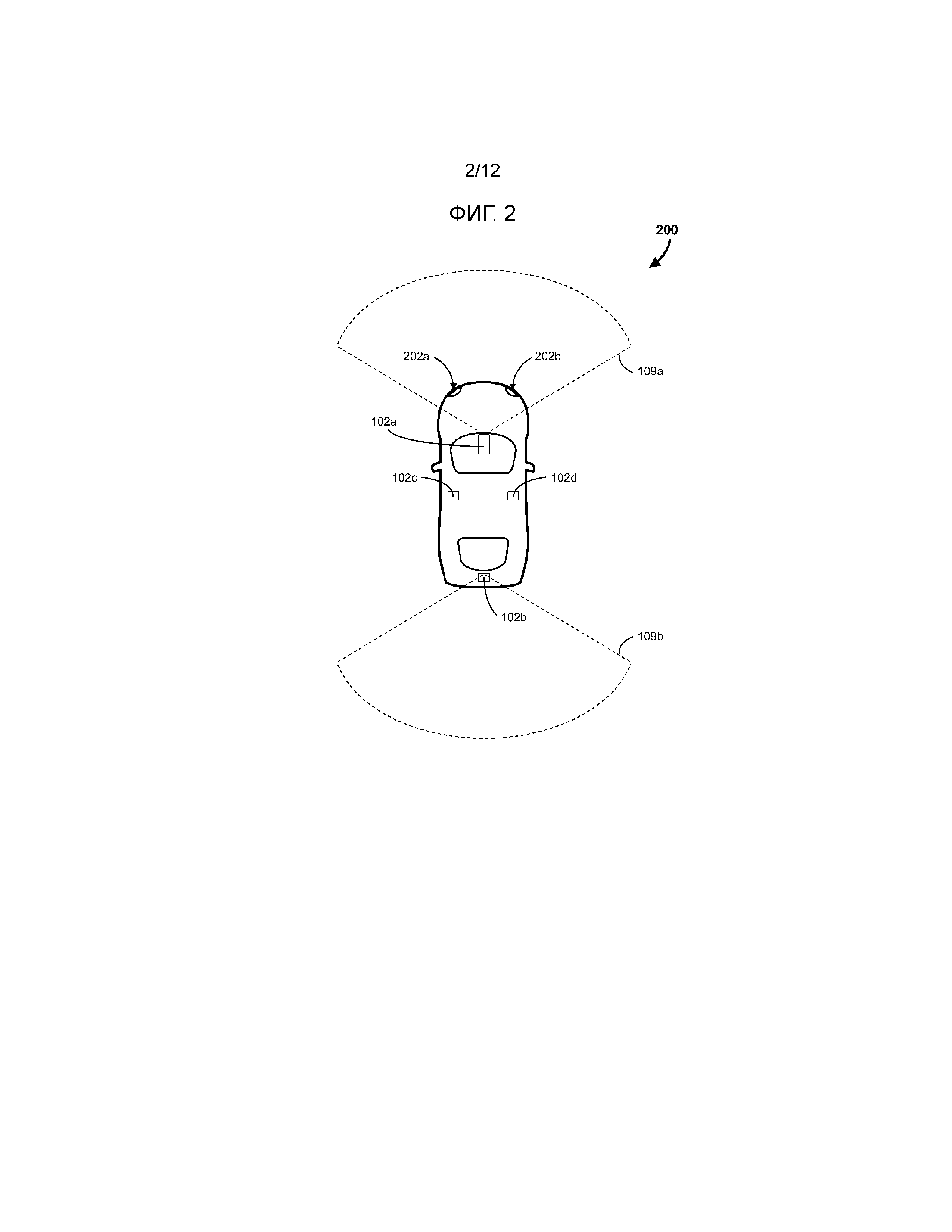
[0006] Фигура 2 представляет собой схему транспортного средства, включающего в себя вычислительную систему транспортного средства.
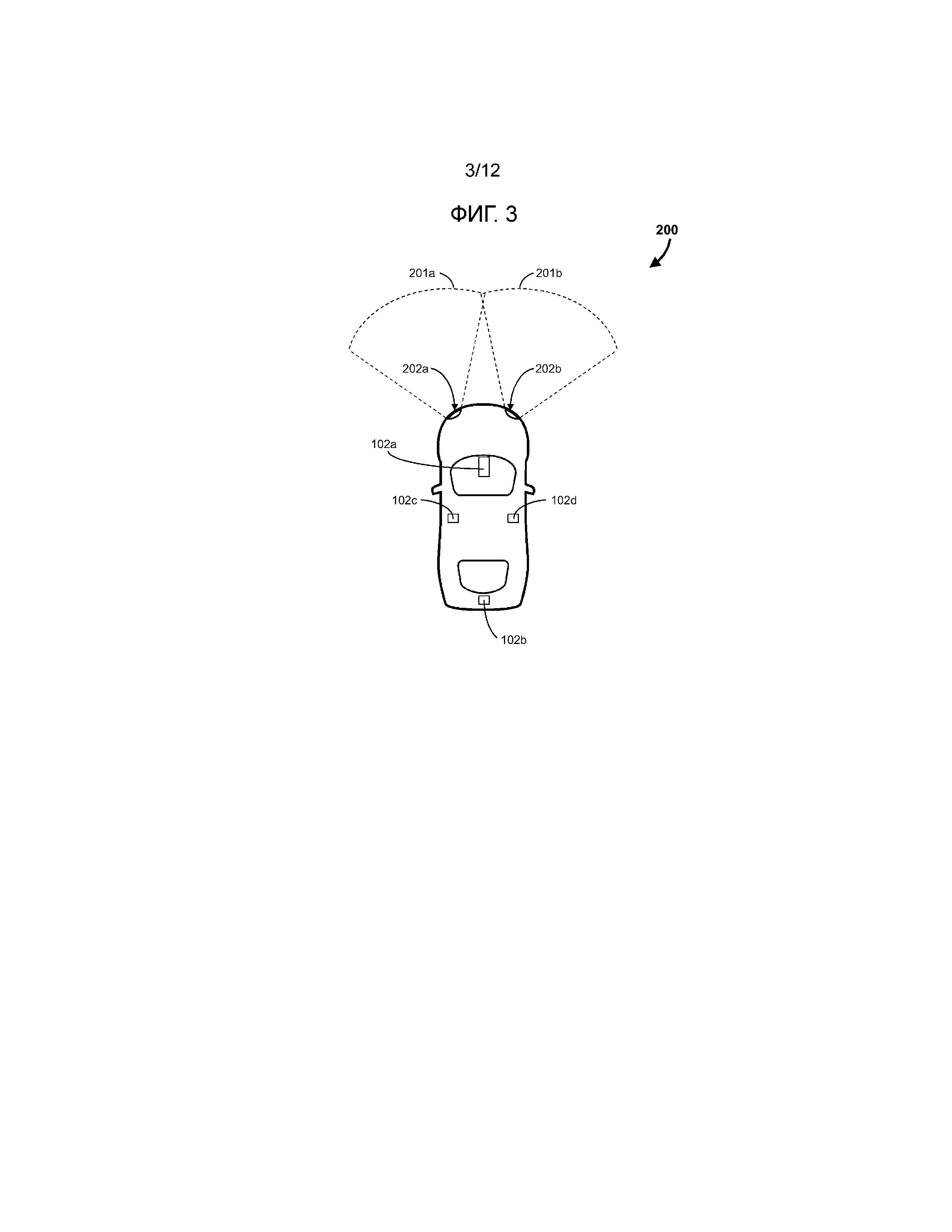
[0007] Фигура 3 представляет собой схему транспортного средства.
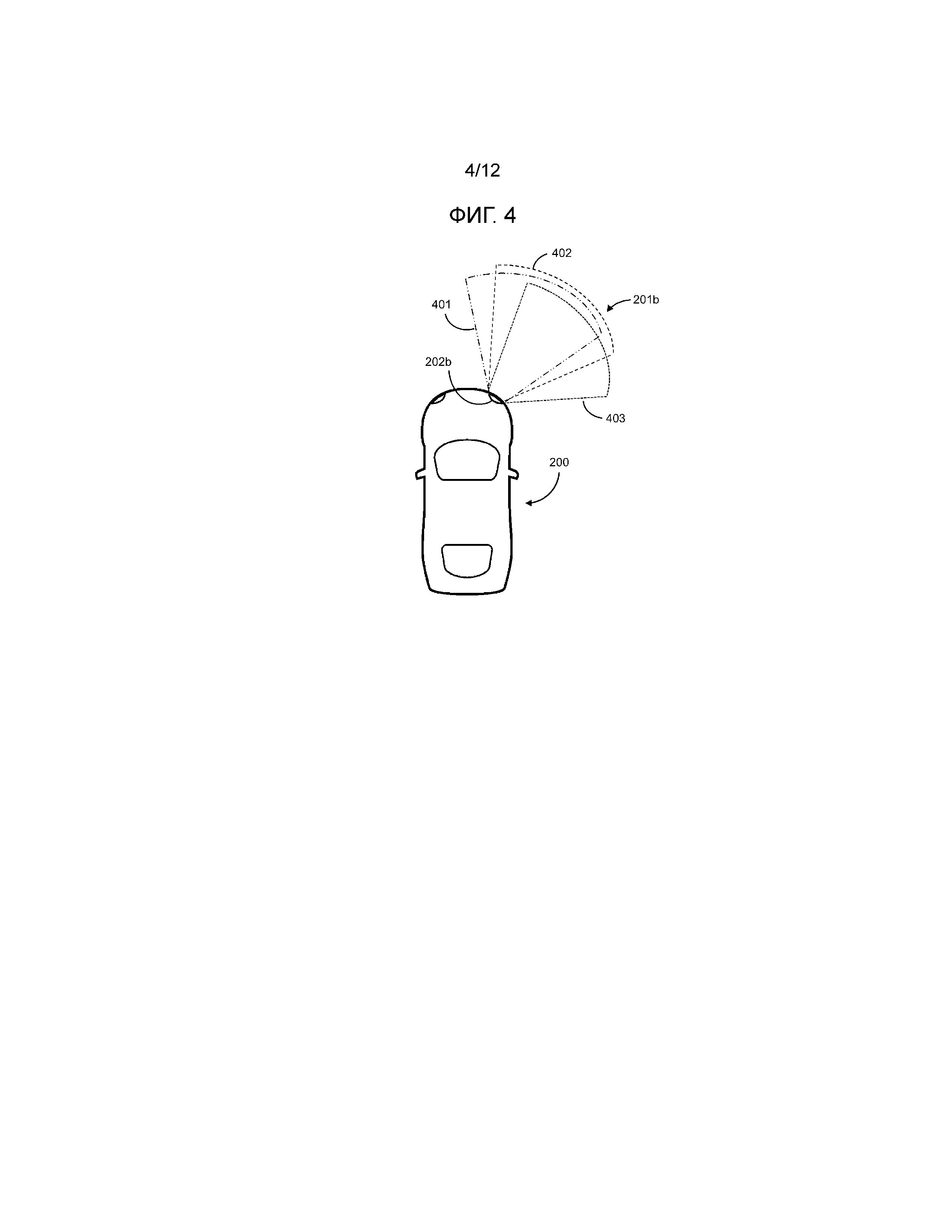
[0008] Фигура 4 показывает различные профили луча.
[0009] Фигуры 5-10 показывают пользовательский интерфейс с фоном изображения и различными элементами, наложенными на изображение.
[0010] Фигура 11 показывает кнопку направления.
[0011] Фигура 12 показывает калибровочную карту с множеством зон.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0012] Хотя изобретение может быть осуществлено в различных формах, на чертежах показаны и далее будут описаны некоторые примерные и неограничивающие варианты осуществления с пониманием того, что настоящее раскрытие следует рассматривать как иллюстрацию изобретения, и оно не предназначено для ограничения изобретения определенными проиллюстрированными вариантами осуществления.
[0013] В этой заявке использование разделительных союзов предназначено для включения соединительных союзов. Использование формы единственного числа не предназначено для указания количества элементов. В частности, ссылка на «объект» предназначена для обозначения одного из возможного множества таких объектов. Дополнительно, союз «или» может быть использован для передачи одновременно присутствующих признаков в качестве одного варианта, а не взаимоисключающих альтернатив в качестве другого варианта. Другими словами, союз «или» следует понимать как включающий в себя «и/или» в качестве варианта и «либо/или» в качестве другого варианта.
[0014] Фигура 1 показывает вычислительную систему 100 примерного транспортного средства 200. Транспортное средство 200 также называется первым транспортным средством 200. Транспортное средство 200 включает в себя электродвигатель, аккумулятор, по меньшей мере одно колесо, приводимое в движение электродвигателем, и систему рулевого управления, выполненную с возможностью поворота по меньшей мере одного колеса вокруг оси. Транспортные средства описаны, например, в заявке на патент США №14/991,496 на имя Miller и др. («Miller») и в патенте США №8,180,547 на имя Prasad и др. («Prasad»), оба из которых включены в данный документ посредством ссылки во всей их полноте.
[0015] Вычислительная система 100 обеспечивает автоматическое управление механическими системами в устройстве. Вычислительная система 100 также обеспечивает связь с внешними устройствами. Вычислительная система 100 включает в себя шину 101 передачи данных, один или более процессоров 108, энергозависимую память 107, энергонезависимую память 106, пользовательские интерфейсы 105, блок 104 телематики, исполнительные механизмы и электродвигатели 103 и локальные датчики 102.
[0016] Шина 101 передачи данных передает электронные сигналы или данные между электронными компонентами. Процессор 108 выполняет операции над электронными сигналами или данными для получения измененных электронных сигналов или данных. Энергозависимая память 107 хранит данные для непосредственного вызова процессором 108. Энергонезависимая память 106 хранит данные для вызова в энергозависимую память 107 и/или процессор 108. Энергонезависимая память 106 включает в себя ряд энергонезависимых запоминающих устройств, включая жесткие диски, SSD, DVD, Blu-Ray и т.д. Пользовательский интерфейс 105 включает в себя дисплеи, дисплеи с сенсорным экраном (например, сенсорный экран 105а), клавиатуры, кнопки (например, контроллер 105b направления) и другие устройства, которые позволяют пользователю взаимодействовать с вычислительной системой. Блок 104 телематики обеспечивает как проводную, так и беспроводную связь с внешними процессорами с помощью Bluetooth, сотовых данных (например, 3G, LTE), USB и т.д. Блок 104 телематики может быть выполнен с возможностью передачи сигналов на определенной частоте.
[0017] Исполнительные механизмы/электродвигатели 103 производят физические действия. Примеры исполнительных механизмов/электродвигателей включают в себя топливные форсунки, рулевое управление, электродвигатель для передачи крутящего момента на колеса, стеклоочистители, цепи тормозных фонарей, цепи фар, передачи, подушки безопасности, тактильные моторы или двигатели и т.д. Локальные датчики 102 передают цифровые показания или измерения на процессор 108. Примеры подходящих датчиков включают в себя температурные датчики, датчики поворота, датчики ремней безопасности, датчики скорости, камеры, лидарные датчики, радиолокационные датчики, ультразвуковые датчики, инфракрасные датчики и т.д. Следует понимать, что различные соединенные компоненты на Фигуре 1 могут включать в себя отдельные или специализированные процессоры и память. Более подробно конструкция и операции вычислительной системы 100 описаны, например, в заявке на патент на имя Miller и/или в патенте на имя Prasad.
[0018] Фигура 2 в общем показывает и иллюстрирует транспортное средство 200, которое включает в себя вычислительную систему 100. Хотя не показано, транспортное средство 200 находится в оперативной беспроводной связи с мобильным устройством, таким как мобильный телефон. Некоторые из локальных датчиков 102 установлены на внешней стороне транспортного средства 200. Локальный датчик 102a может быть ультразвуковым датчиком, лидарным датчиком, камерой, видеокамерой и/или микрофоном и т.д. Локальный датчик 102a может быть выполнен с возможностью обнаружения объектов впереди транспортного средства 200, как обозначено передним диапазоном 109a обнаружения. Локальный датчик 102b может включать в себя один или более из ультразвукового датчика, лидарного датчика, инфракрасного датчика, камеры, видеокамеры и/или микрофона и т.д. Локальный датчик 102b может быть выполнен с возможностью обнаружения объектов позади транспортного средства 200, как обозначено задним диапазоном 109b обнаружения. Левый датчик 102c и правый датчик 102d могут быть выполнены с возможностью выполнения тех же функций для левой и правой сторон транспортного средства 200. Транспортное средство 200 включает в себя множество других датчиков 102, расположенных в салоне транспортного средства или снаружи транспортного средства. Эти датчики могут включать в себя какой-либо или все из датчиков, раскрытых в патенте на имя Prasad.
[0019] Следует понимать, что транспортное средство 200 выполнено с возможностью выполнения способов и операций, описанных ниже. В некоторых случаях транспортное средство 200 выполнено с возможностью выполнения этих функций с помощью компьютерных программ, хранящихся в энергозависимой и/или энергонезависимой памяти вычислительной системы 100. Процессор «выполнен с возможностью» выполнения раскрытой операции, когда процессор находится в оперативной связи с памятью, хранящей программное обеспечение с кодом или инструкциями, воплощающими раскрытую операцию. Дополнительное описание того, как процессор, запоминающие устройства и программы взаимодействуют, содержится в патенте на имя Prasad. Следует понимать, что мобильное устройство и/или внешний сервер в оперативной связи с транспортным средством 200 выполняет некоторые или все из способов и операций, обсуждаемых ниже.
[0020] В соответствии с различными вариантами осуществления транспортное средство 200 включает в себя признаки транспортного средства 100a в патенте на имя Prasad. В соответствии с различными вариантами осуществления вычислительная система 100 включает в себя признаки VCCS 102 на Фигуре 2 в патенте на имя Prasad. В соответствии с различными вариантами осуществления транспортное средство 200 находится в связи с некоторыми или всеми из устройств, показанных на Фигуре 1 в патенте на имя Prasad, включая мобильное устройство 110, башню 116 связи, телекоммуникационную сеть 118, Интернет 120 и центр 122 обработки данных.
[0021] Выражение «загруженное транспортное средство» при использовании в формуле изобретения настоящим определяется как означающее: «транспортное средство, включающее в себя: электродвигатель, множество колес, источник питания и систему рулевого управления; причем электродвигатель передает крутящий момент на по меньшей мере одно из множества колес, тем самым приводя в движение по меньшей мере одно из множества колес; причем источник питания подает энергию на электродвигатель; и причем система рулевого управления выполнена с возможностью управления по меньшей мере одним из множества колес». Выражение «оборудованное электрическое транспортное средство» при использовании в формуле изобретения настоящим определяется как означающее «транспортное средство, включающее в себя: аккумулятор, множество колес, электродвигатель, систему рулевого управления; причем электродвигатель передает крутящий момент на по меньшей мере одно из множества колес, тем самым приводя в движение по меньшей мере одно из множества колес; причем аккумулятор является перезаряжаемым и выполнен с возможностью подачи электроэнергии на электродвигатель, тем самым приводя в движение электродвигатель; и причем система рулевого управления выполнена с возможностью управления по меньшей мере одним из множества колес».
[0022] Как показано на Фигурах 2 и 3, транспортное средство 200 включает в себя левую фару 202a и правую фару 202b. Фары 202 являются адаптивными, это означает, что фары 202 во время адаптивного рулевого управления выполнены с возможностью проецировать луч света, имеющий профиль, основанный на угле поворота и/или скорости транспортного средства 200. В соответствии с различными вариантами осуществления фары 202 имеют конструкцию системы 10 передних фар, описанную в патенте США №8,433,479 на имя Lukacs и др. («Lukacs»), который включен в данный документ посредством ссылки во всей своей полноте.
[0023] Одна из фар 202 может иметь конфигурацию, показанную на Фигуре 1 в патенте на имя Lukacs. Другая фара 202 может иметь зеркальное отображение конфигурации, показанной на Фигуре 1 в патенте на имя Lukacs. В соответствии с различными вариантами осуществления транспортное средство 200 выполнено с возможностью управления фарами 202 с помощью некоторых или всех из функций и операций, описанных в патенте на имя Lukacs, и, таким образом, транспортное средство 200 настоящего изобретения может иметь некоторые или все из признаков транспортного средства, описанного в патенте на имя Lukacs.
[0024] Как показано на Фигуре 1 в патенте на имя Lukacs, каждая из фар 202 настоящего изобретения может включать в себя основной источник света и множество дополнительных источников света. Как показано на Фигуре 2 в патенте на имя Lukacs, транспортное средство 200 настоящего изобретения может регулировать лучи фар путем активации, деактивации и/или регулирования дополнительных источников света. Как показано на Фигуре 3 в патенте на имя Lukacs, транспортное средство 200 настоящего изобретения регулирует лучи во время адаптивного рулевого управления, основываясь на угле поворота и скорости транспортного средства (когда адаптивное рулевое управление активно).
[0025] Альтернативно или в дополнение к дополнительным источникам света транспортное средство 200 может быть выполнено с возможностью поворота основного источника света вокруг (a) вертикальной оси (подобно маяку) и (b) горизонтальной оси. Один или более электродвигателей приводят во вращение основной источник света. Когда адаптивное рулевое управление активно, транспортное средство управляет электродвигателями, основываясь на угле поворота и скорости транспортного средства.
[0026] Таким образом, следует понимать, что транспортное средство 200 оборудовано с возможностью перестраивать или регулировать лучи фар с помощью по меньшей мере одной из двух возможных конфигураций: (a) путем поворота фары вокруг вертикальной оси и горизонтальной оси с помощью одного или более электродвигателей; (b) путем активации, деактивации и/или регулирования питания основной фары и дополнительных фар, чтобы поворачивать луч по горизонтали и/или по вертикали.
[0027] Следующее далее обсуждение относится к перестройке или регулированию лучей фар 202 в соответствии с пользовательскими вводами, принимаемыми через сенсорный экран 105a и/или клавишную панель 105b направления. В соответствии с различными вариантами осуществления регулирование пользователем лучей в соответствии с описанными ниже способами доступно только в том случае, если транспортное средство находится в режиме парковки. В соответствии с различными вариантами осуществления регулирование пользователем лучей автоматически отключается тогда, когда обнаружено превышение транспортным средством определенной заданной скорости (например, 0 миль/ч (0 км/ч) или 10 миль/ч (16, 09 км/ч)).
[0028] Когда транспортное средство перестраивает или регулирует лучи фар, лучи, выходящие из фар, поворачиваются из их исходного положения в их новое или выбранное положение. Как отмечено выше, новое или выбранное положение может быть разнесено по горизонтали и/или по вертикали от исходного положения.
[0029] Когда транспортное средство 200 оборудовано конфигурацией (a), транспортное средство 200 дает команду одному или более электродвигателям (i) поворачивать фару вокруг вертикальной оси в новое горизонтальное положение и (ii) поворачивать фару вокруг горизонтальной оси (т.е. оси, параллельной осям транспортного средства) в новое или выбранное вертикальное положение. Таким образом, лучи поворачиваются из исходного положения в новое заданное пользователем положение.
[0030] Когда транспортное средство 200 оборудовано конфигурацией (b), транспортное средство 200 может имитировать вращение (и, таким образом, достигать эффекта поворота) путем последовательного прохождения через заданные профили луча (каждый профиль луча связан с уровнем мощности основной фары и уровнем мощности дополнительной фары для каждой из дополнительных фар).
[0031] Например, транспортное средство 200 может достигать профиля (1) луча путем активации основной фары и ни одной из дополнительных фар, чтобы построить луч, который проходит в общем параллельно прямой дороге. Транспортное средство 200 может достигать профиля (2) луча путем активации основной фары и некоторых из дополнительных фар, чтобы построить луч, который проходит под углом 5 градусов по горизонтали относительно в общем прямой дороги и под углом 5 градусов по вертикали относительно в общем прямой дороги. Транспортное средство 200 может достигать профиля (3) луча путем активации основной фары и всех дополнительных фар, чтобы построить луч, который проходит под углом 10 градусов по горизонтали относительно в общем прямой дороги и под углом 10 градусов по вертикали относительно в общем прямой дороги. Путем последовательного прохождения через профили (1), (2), и (3) выбранная фара поворачивается от профиля (1) к профилю (3). Следует понимать, что обе фары могут поворачиваться одновременно, и что одна фара может поворачиваться независимо от другой фары.
[0032] Фигура 4 в общем показывает и иллюстрирует три профиля луча. Транспортное средство 200 чередует первый профиль 401 луча, второй профиль 402 луча и третий профиль 403 луча. Первый профиль 401 луча может быть профилем (1) луча, второй профиль 402 луча может быть профилем (2) луча, и третий профиль 403 луча может быть профилем (3) луча. Первый профиль 401 луча параллелен дороге. Второй профиль 402 луча находится под углом X по горизонтали и под углом Y по вертикали относительно дороги. Третий профиль 403 луча находится под углом 2*X по горизонтали и под углом 2*Y по вертикали относительно дороги.
[0033] Когда транспортное средство 200 оборудовано конфигурацией (b), транспортное средство 200 имитирует вращение фары (т.е. создает эффект поворота) путем последовательного прохождения через профили луча в соответствии со следующим массивом: [профиль (1) луча, профиль (2) луча, профиль (3) луча], предполагая, что профиль (1) луча соответствует исходному положению, и профиль (3) луча соответствует указанному пользователем конечному положению. С помощью дополнительных профилей луча (например, 20 профилей луча) транспортное средство 200 может производить более достоверное имитирование вращения.
[0034] Со ссылкой на Фигуры 5-10 транспортное средство 200 включает в себя дисплей 105a с сенсорным экраном, который установлен на приборной панели транспортного средства. Транспортное средство 200 выполнено с возможностью представления самого последнего изображения, захватываемого передним локальным датчиком 102a, на дисплее 105a. Когда передний локальный датчик 102a представляет собой видеокамеру, изображение обновляется с заданной частотой (например, 24 раза в секунду). Хотя передний локальный датчик 102a показан как установленный на ветровом стекле на Фигуре 3, передний локальный датчик 102a может быть расположен в любом подходящем месте (например, может быть установлен непосредственно над передним бампером транспортного средства 200).
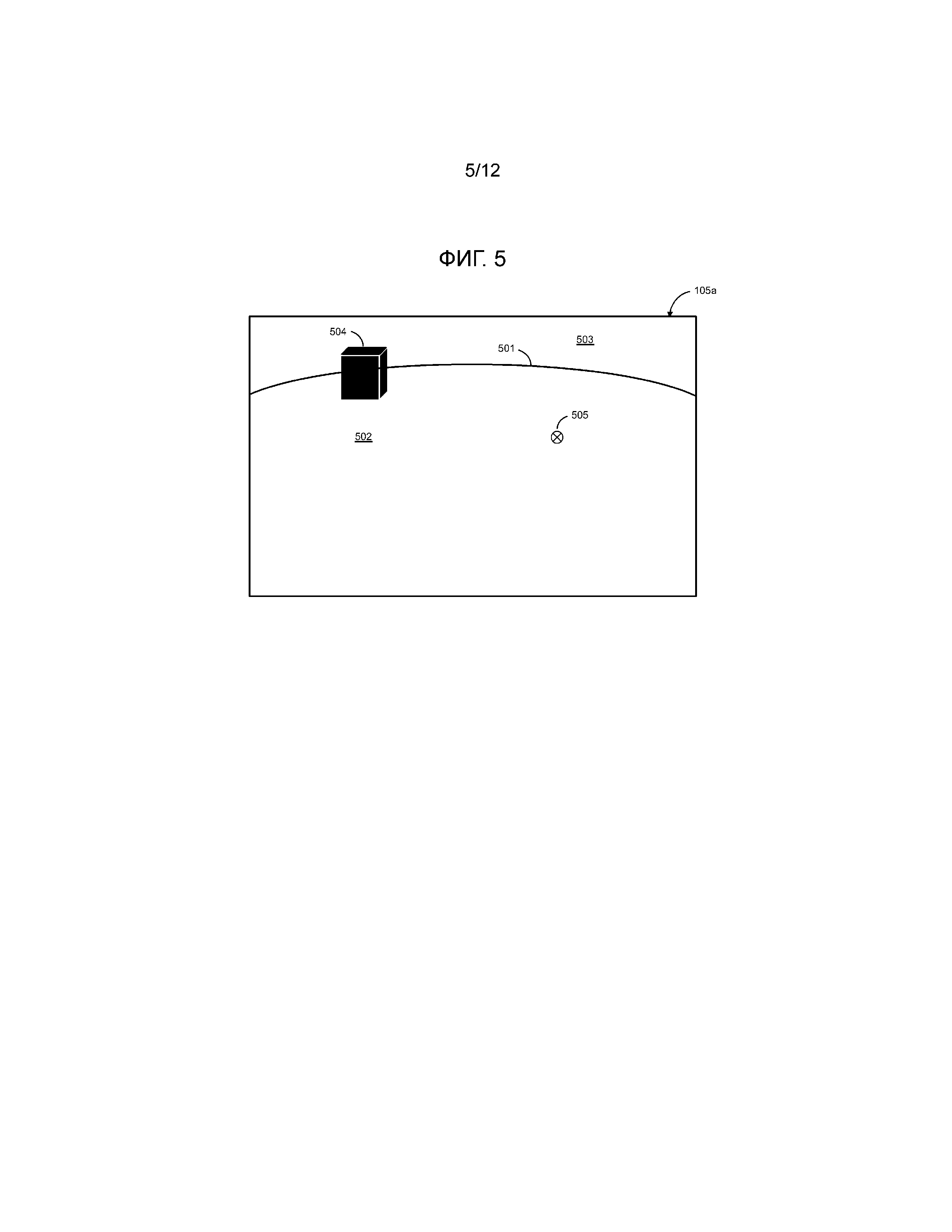
[0035] На Фигурах 5-10 передний локальный датчик 102a (например, видеокамера) захватывает землю или дорожное покрытие 502, объект 504 (например, ящик), горизонт 501 и небо 503. Изображение, представленное на дисплее 105a, представляет собой текущий вид переднего локального датчика 102a. Когда вид меняется (например, транспортное средство перемещается по земле или дорожному покрытию 502), изображение, представленное на дисплее 105a, будет соответствующим образом обновляться. Иными словами, отображаемое изображение представляет собой один кадр из видео, состоящего из множества кадров в секунду.
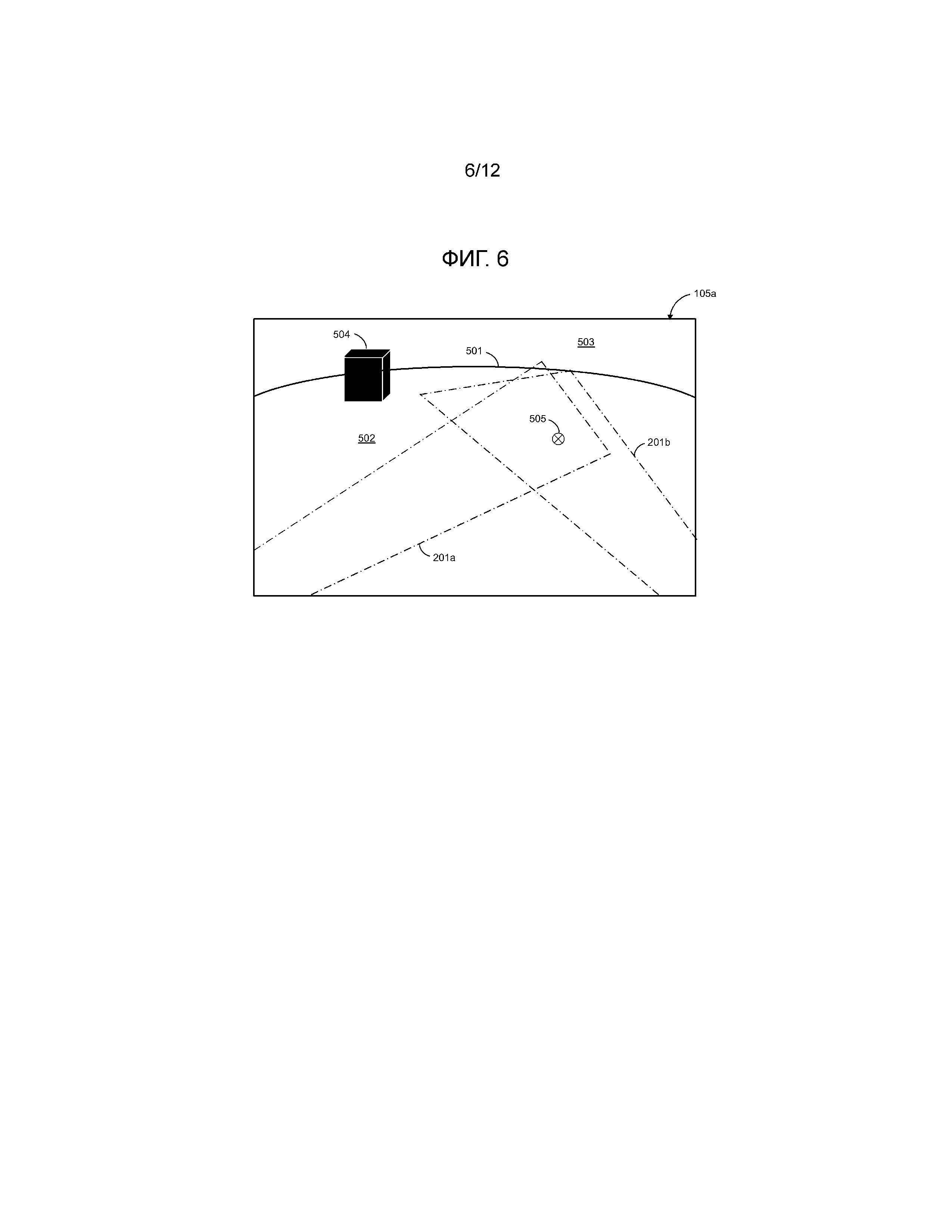
[0036] Как показано на Фигуре 5, настоящее изобретение позволяет пользователю размещать значок 505 на изображении. Пользователь может размещать значок 505, прикасаясь или нажимая на дисплей 105a с сенсорным экраном. В ответ одна или обе фары 201, 202 поворачиваются из их текущих положений, чтобы указывать на место 505. Со ссылкой на Фигуру 6 левый луч 201a левой фары 202a и правый луч 201b правой фары 202b в данный момент указывают на значок 505. Конкретнее и как обсуждается ниже, фары «указывают» путем перестройки луча, связанного с зоной, которая охватывает или ограничивает значок 505 в двумерном пространстве сенсорного экрана 105a.
[0037] Управление лучами фар имеет две проблемы: во-первых, профили луча сложны и не соблюдают простых геометрических соотношений из-за присущих фарам конструкционных аспектов (например, формы конусообразных корпусов фар). См., например, Фигуры 3-7 публикации патента США №2004/0114379 на имя Miller и др. («Miller-2»), которая включена в данный документ путем ссылки во всей своей полноте. Более того, лучи света являются трехмерными, тогда как дисплеи, такие как дисплей 105a с сенсорным экраном, являются двумерными.
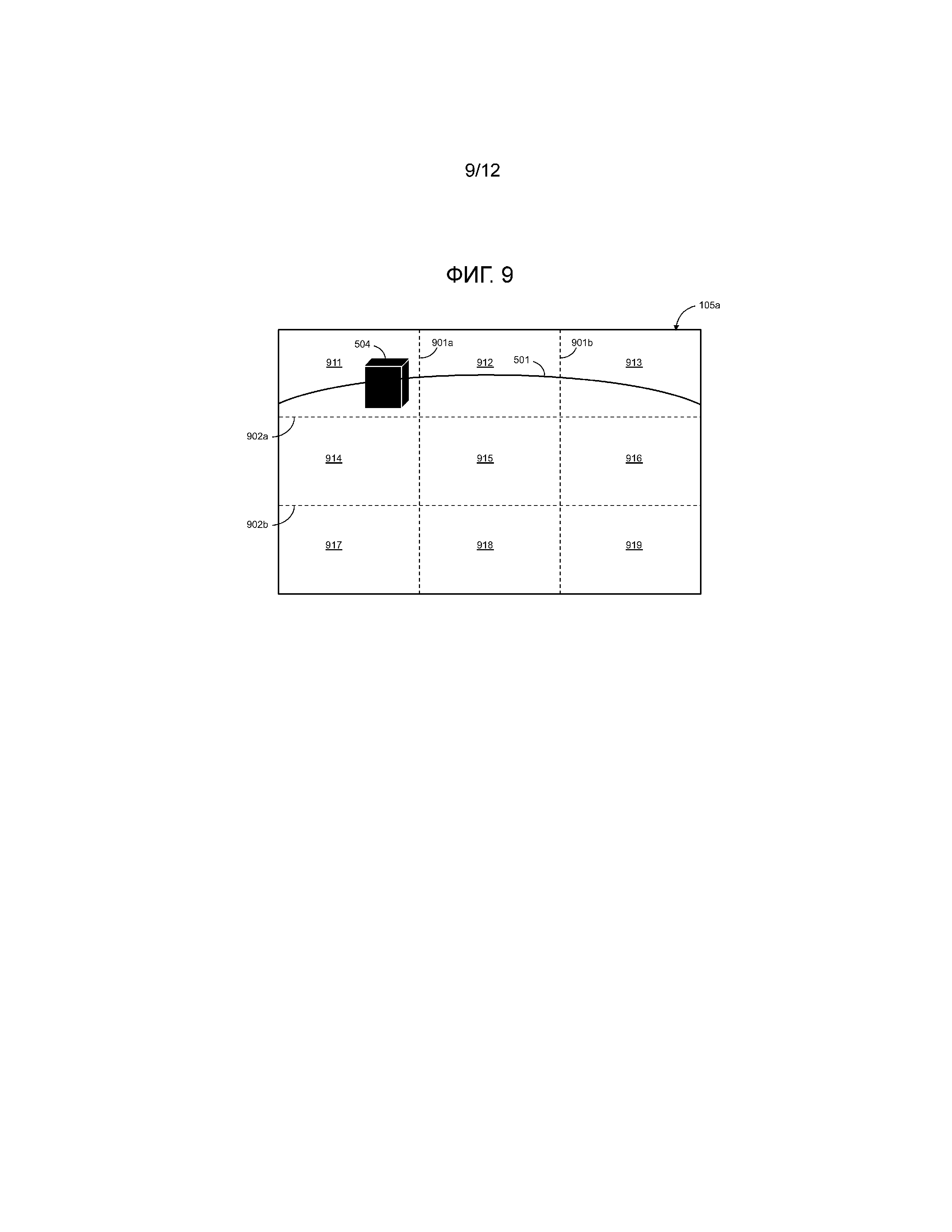
[0038] Для решения этих проблем фары 202 могут быть откалиброваны во время изготовления. Каждая калибровка может быть представлена в виде калибровочной карты, разделенной на множество зон, как показано на Фигуре 9. Каждая калибровочная карта (т.е. обе из калибровочной карты левой фары и калибровочной карты правой фары) связывает каждый пиксель сенсорного экрана 105a с определенной зоной. Каждая зона отображается в (a) профиле луча или (b) отсутствии профиля луча (т.е. мертвой зоне, как подробно обсуждается ниже).
[0039] Фигура 9 показывает калибровочную карту левой фары. Транспортное средство включает в себя подобную, но зеркально отраженную или перевернутую карту для правой фары 202b. Калибровочная карта на Фигуре 9 сегментирует изображение, представленное на дисплее 105a с сенсорным экраном, с помощью вертикальных разделителей 901 и 901b и горизонтальных разделителей 902a и 902b на множество зон 911-919. Каждая зона 911-919 соответствует (a) одному заданному профилю 202a левого луча или (b) мертвой зоне. Каждая зона 911 охватывает по меньшей мере один пиксель изображения и в предпочтительных вариантах осуществления множество пикселей. Хотя калибровочная карта на Фигуре 9 показана как занимающая весь дисплей 105а с сенсорным экраном, следует понимать, что калибровочная карта должна накладываться только на изображение окружающей среды перед транспортным средством. Таким образом, если изображение занимает не весь сенсорный экран (например, верхний правый угол), то калибровочная карта изменяется, чтобы накладываться только на участок сенсорного экрана, показывающий изображение.
[0040] Когда транспортное средство оборудовано конфигурацией (a), транспортное средство может регулировать электродвигатели, чтобы перестраивать луч в соответствии с заданными углами фар по горизонтали и по вертикали, связанными с зоной, во время изготовления. Когда транспортное средство оборудовано конфигурацией (b), транспортное средство включает основную фару и выбранные дополнительные фары в соответствии с лучом, связанным с выбранной зоной. В итоге и как отмечено выше, каждая из зон 911-919 отображается (a) в разном профиле или (b) мертвой зоне (т.е. отсутствии профиля луча).
[0041] На практике сегментация зон может быть более мелкой, чем показано на Фигуре 9. Конкретнее, вместо девяти отдельных зон транспортное средство может включать в себя сотни или тысячи отдельных зон. Фигура 12, например, (обсуждается ниже) показывает сенсорный экран 105а, сегментированный на 16 зон.
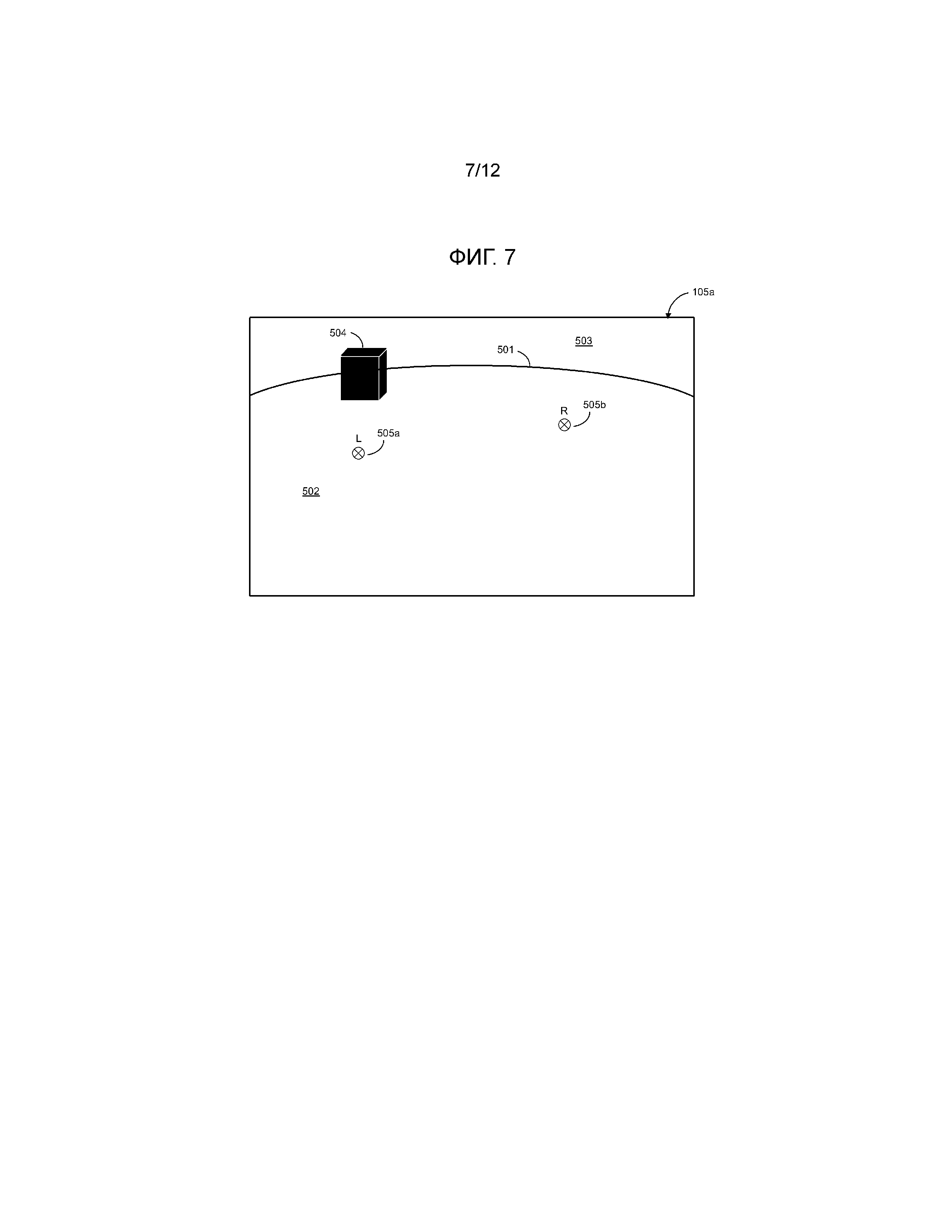
[0042] В соответствии с различными вариантами осуществления и как показано на Фигуре 7, пользователь устанавливает значок 505a левой фары и независимый значок 505b правой фары для освещения в разных местах. Сенсорный экран 105a отображает переключатель (не показан), который позволяет пользователю выбирать либо режим левой фары, либо режим правой фары, либо режим обеих фар (т.е. двойной режим).
[0043] После того, как пользователь приводит в действие переключатель, пользователь касается экрана, чтобы перестраивать одну или более фар, связанных с выбранным переключателем. Транспортное средство 200 перестраивает выбранную(ые) фару(ы) в соответствии с калибровочной(ыми) картой(ами), связанной(ыми) с выбранной(ыми) фарой(ами), показанной(ыми) на Фигуре 9. Конкретнее, транспортное средство 200 перестраивает левую фару 202a в соответствии с левой калибровочной картой и правую фару 202b в соответствии с правой калибровочной картой.
[0044] Как отмечено выше, транспортное средство 200 поворачивает лучи из их исходных положений в их конечные или выбранные положения. Таким образом, когда транспортное средство 200 оборудовано конфигурацией (b), транспортное средство последовательно проходит через массив лучей, включая исходный луч, один или более промежуточных лучей и конечный луч. Промежуточные лучи могут соответствовать зонам, расположенным на пути между исходным положением и конечным положением. Например, со ссылкой на Фигуру 9, если левая фара изначально указывала на зону 911, и пользователь прикоснулся к пикселю внутри зоны 919, левая фара будет последовательно проходить через следующий массив лучей [зона 911, зона 915 и зона 919]. Для нахождения промежуточных профилей транспортное средство может прорисовывать или определять линию от центрального места (например, средней точки) исходной зоны до центрального места (например, средней точки) конечной или выбранной зоны, а затем последовательно проходить через каждую зону (и, таким образом, профили фары, связанные с этими зонами), пересекаемую линией.
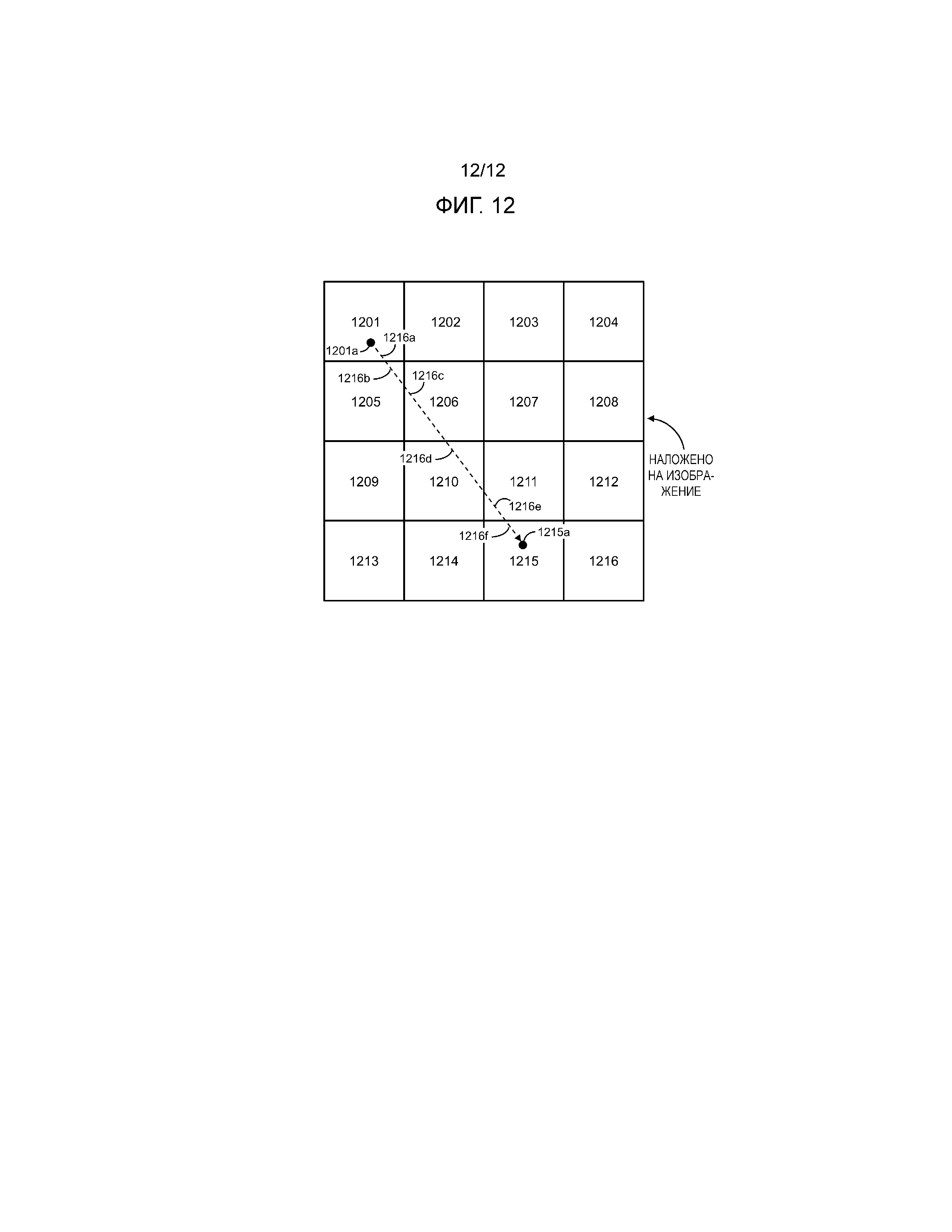
[0045] Когда транспортное средство оборудовано конфигурацией (b), транспортное средство 200 перестраивает луч, связанный с каждой зоной массива, в течение заданного времени. В соответствии с некоторыми вариантам осуществления транспортное средство 200 действует в зоне в течение промежутка времени, пропорционального длине сегмента, ограниченного этой зоной. Фигура 12 показывает изображение, сегментированное на шестнадцать квадратных зон. Средняя точка зоны 1201 представляет собой среднюю точку 1201a. Средняя точка зоны 1215 представляет собой среднюю точку 1215a. Номера элементов не наложены на изображение.
[0046] Со ссылкой на Фигуру 12 одна из фар (например, левая фара 202a) изначально построила луч, связанный с зоной 1201. Затем пользователь разместил значок 505a левой фары на дисплее 105a в соответствии с зоной 1215. В ответ луч 201a левой фары поворачивается от зоны 1201 к зоне 1215 в соответствии с сегментом 1216, соединяющем среднюю точку 1201a зоны 1201 со средней точкой 1215a зоны 1215.
[0047] Сегмент 1216 имеет первую длину 1216а, ограниченную зоной 1201, вторую длину 1216b, ограниченную зоной 1205, третью длину 1216c, ограниченную зоной 1206, четвертую длину 1216d, ограниченную зоной 1210, пятую длину 1216e, ограниченную зоной 1211, и шестую длину 1216f, ограниченную зоной 1215. Таким образом, транспортное средство последовательно проходит через следующий массив: [луч, отображаемый в зоне 1201 в течение времени, пропорционального длине 1216a; луч, отображаемый в зоне 1205 в течение времени, пропорционального длине 1216b; луч, отображаемый в зоне 1206 в течение времени, пропорционального длине 1216c; и т.д.]. Поскольку зона 1215 представляет собой выбранную или конечную зону, транспортное средство связывает неограниченное время с зоной 1215 (т.е. применяет луч, отображаемый в зоне 1215, не ссылаясь на длину 1216f). В соответствии с различными вариантами осуществления транспортное средство немедленно переходит из исходной зоны во вторую зону (например, связывает время, равное нулю, с зоной 1201).
[0048] Когда транспортное средство оборудовано в соответствии с конфигурацией (a), транспортное средство отображает первую точку на двумерном графике, имеющем координату X, равную углу по горизонтали исходной зоны, и координату Y, равную углу по вертикали исходной зоны. Транспортное средство отображает вторую точку на двумерном графике с координатой X, равной углу по горизонтали конечной или выбранной зоны, и координатой Y, равной углу по вертикали конечной или выбранной зоны. Затем транспортное средство дает команду одному или более электродвигателям поворачивать фару вдоль сегмента, соединяющего первую точку со второй точкой, с постоянной скоростью. Электродвигатели могут быть шаговыми электродвигателями, и, таким образом, фара может мгновенно приостанавливаться, когда она следует вдоль сегмента.
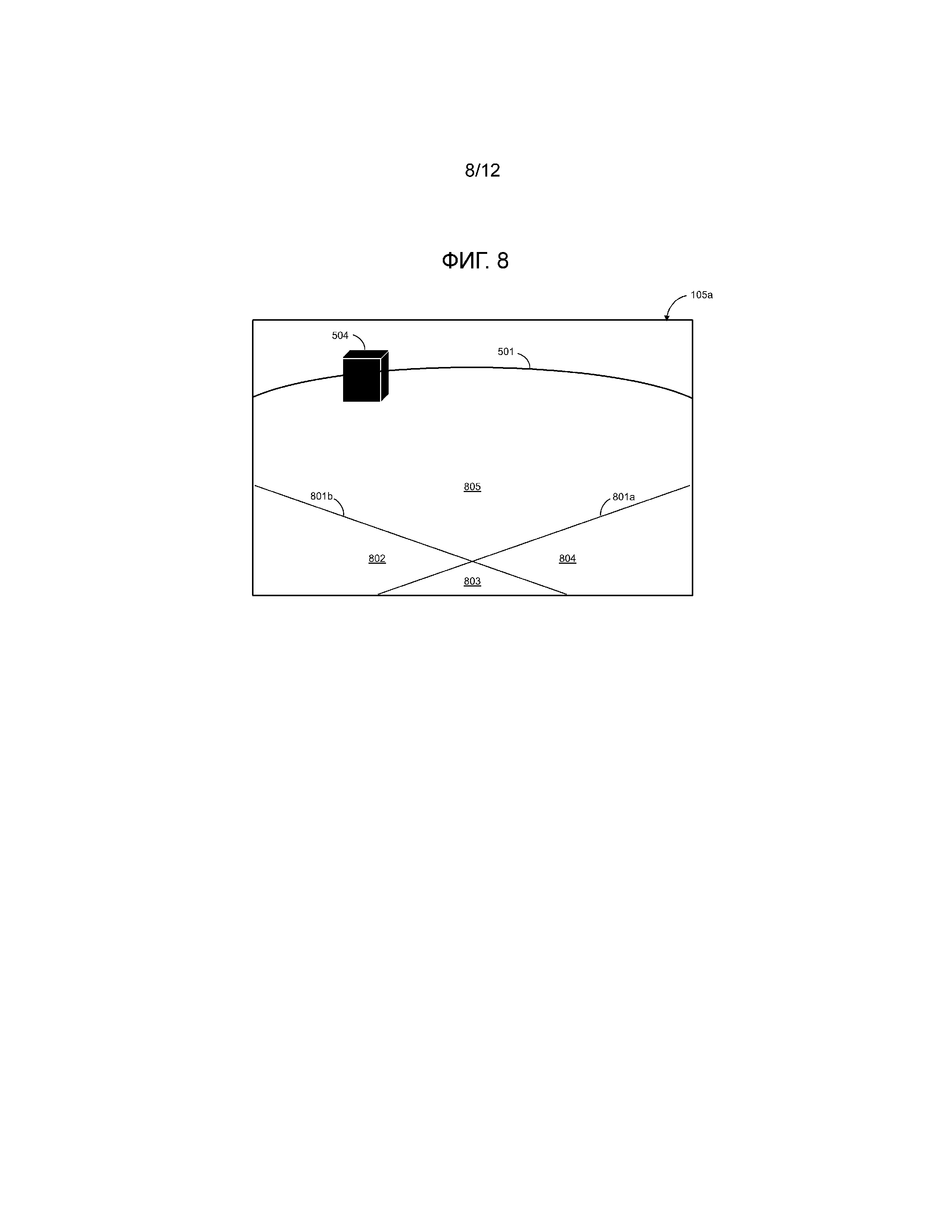
[0049] Вследствие физических ограничений (например, ограничений, создаваемых геометрией фар) транспортное средство 200 может быть неспособно перестраивать фары в любое положение, отображаемое на сенсорном экране 105a. Фигура 8 показывает границу 801a левой фары и границу 801b правой фары, наложенные на сенсорный экран 105a. Границы разделяют изображение, отображаемое на сенсорном экране 105a на области 802-805.
[0050] Левая фара 202a способна перестраиваться, чтобы указывать на места в пределах областей 802 и 805. Левая фара 202a неспособна перестраиваться, чтобы указывать на места в пределах областей 803 и 804. В связи с этим области 803 и 804 представляют собой мертвые зоны для левой фары 202a. Правая фара 202b способна перестраиваться, чтобы указывать на места в пределах областей 804 и 805. Правая фара 202b неспособна перестраиваться, чтобы указывать на места в пределах областей 802 и 803. В связи с этим области 802 и 803 представляют собой мертвые зоны для правой фары 202b. Таким образом, следует понимать, что область 803 представляет собой мертвую зону как для левой фары 202a, так и для правой фары 202b.
[0051] Как отмечено выше, транспортное средство может накладывать границы 801 и/или области 802-805 на изображение, чтобы направлять пользователя. Границы 801 и области 802-805 могут быть предварительно загружены в транспортное средство 200 при изготовлении. Хотя границы 801 показаны как линейные, на практике они могут напоминать шаги по периметрам калибровочных зон. Например, со ссылкой на Фигуру 12 правая граница 801b может следовать следующим образом: (a) сегмент между зонами 1214 и 1215, (b) сегмент между зонами 1210 и 1214, (c) сегмент между зонами 1209 и 1210 и (d) сегмент между зонами 1205 и 1209. В результате, зоны 1209, 1213, и 1214 будут соответствовать области 802.
[0052] Со ссылкой на Фигуру 8 одна или обе из границ 801a и 801b могут автоматически появляться и/или исчезать в зависимости от фары, выбираемой с помощью переключателя. Например, со ссылкой на Фигуру 7, если пользователь переключается на управление только левой фарой 202a с помощью значка 505a левой фары, то могут быть отображены только границы и/или области, относящиеся к левой фаре. Например, граница 801a левой фары будет отображаться, а граница 801b правой фары не будет отображаться. Области 803 и 804 могут быть неактивны или затемнены. Если правая фара 202b уже включена и строит луч в соответствии с указанной зоной, то правая фара 202b поддерживает луч, в то время как левая фара 202a приводится в действие.
[0053] Со ссылкой на Фигуры 9 и 12 следует понимать, что калибровочная карта подобно границам 801 может быть наложена на изображение. Фигура 9 показывает калибровочную карту, разделяющую изображение, отображаемое на сенсорном экране 105a, на зоны. Границы 801 могут быть отображены (например, как шаги), и мертвые зоны могут быть неактивны. Карты для левой фары и правой фары могут быть наложены на изображение в соответствии с той же геометрией (например, как показано на Фигуре 9 или Фигуре 12), но зоны правой фары будут связаны с перевернутыми или зеркальными операциями по сравнению с зонами левой фары.
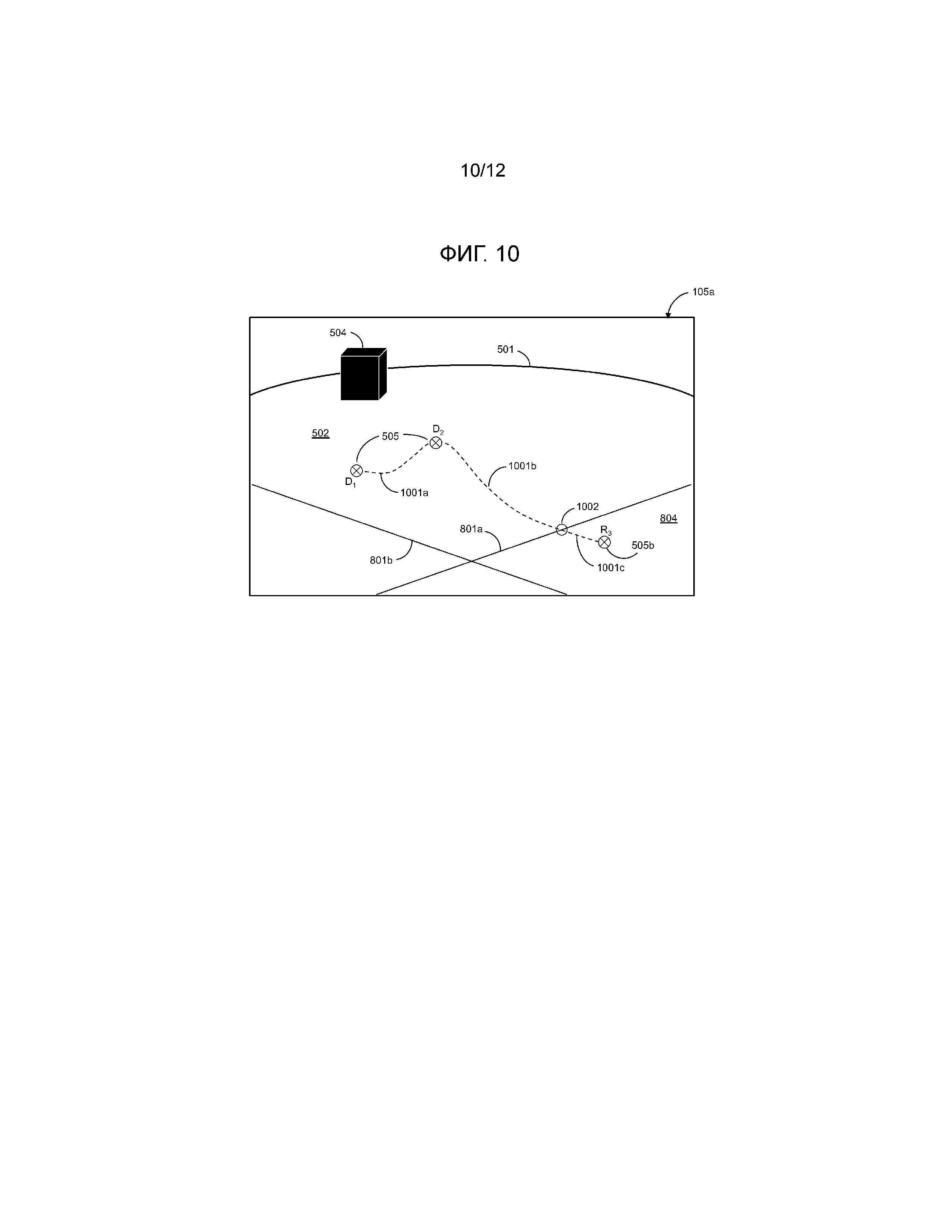
[0054] Как отмечено выше, пользователь может прикасаться к пикселю изображения. В ответ транспортное средство 200 перестраивает или поворачивает выбранную(ые) фару(ы) в выбранное место. Альтернативно, как показано на Фигуре 10, пользователь может перетаскивать значок по изображению, создавая поворот вручную по пути перетаскивания.
[0055] На Фигуре 10 пользователь переключился в двойной режим и разместил двойной значок 505 в D1. Затем пользователь перетащил двойной значок 505 по пути 1001a-D2. После D2 пользователь перетащил двойной значок 505 вдоль путей 1001b и 1001c-R3. Отметим, что R3 находится в области 804, которая представляет собой мертвую зону для левой фары 202a. Таким образом, транспортное средство автоматически удаляет «D», автоматически отображаемое над двойным значком 505, и автоматически отображает «R» над значком 505b правой фары. «R» сообщает, что только правая фара указывает в соответствии со значком 505b. Вместо букв «D», «R» и «L» транспортное средство может просто изменять цвет или геометрию значка. Например: зеленые значки могут соответствовать двойному режиму; красные значки могут соответствовать левому режиму; синие значки могут соответствовать правому режиму.
[0056] Когда пользователь перетаскивает значок 505 по пути 1001b, значок 505 достигает границы 801a левой фары в точке 1002. В точке 1002 левая фара 202a выключается, и значок 505 с «D» заменяется значком 505b с «R».
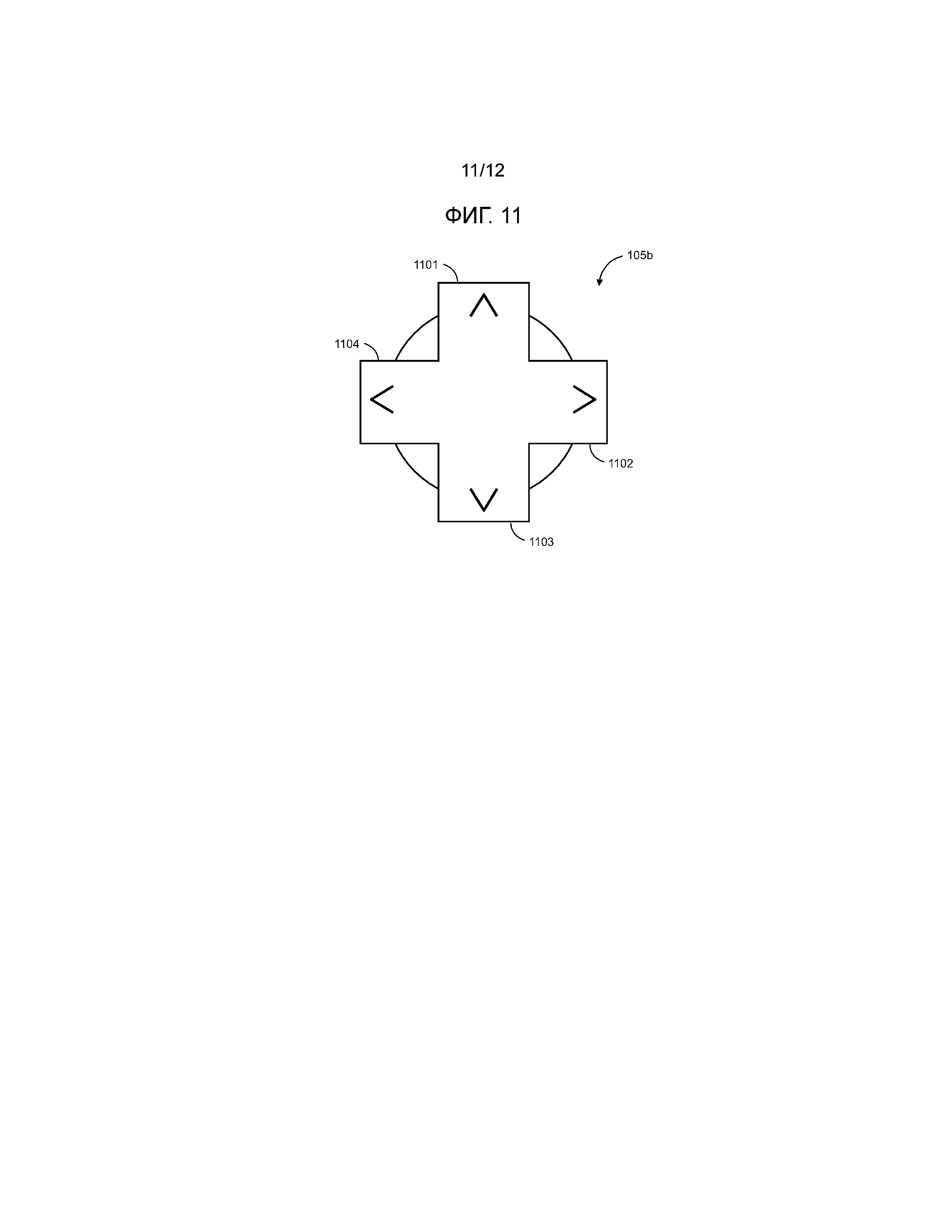
[0057] Фигура 11 в общем показывает и иллюстрирует клавишную панель 105b направления. Кнопка 105b направления с помощью клавиш 1101-1104 направления позволяет пользователю регулировать одну или обе фары (выбираемые с помощью переключателя). Вместо того, чтобы нажимать на изображение через сенсорный экран 105a, пользователь может приводить в действие выбранную(ые) фару(ы) с помощью кнопки 105b направления. В соответствии с различными вариантами осуществления щелчок по клавише направления (например, направленной вверх клавише 1101) заставляет выбранную(ые) фару(ы) переходить в смежную зону (например, направленная вверх клавиша 1101 заставляет выбранную(ые) фару(ы) перемещаться на одну зону вверх). Кнопка 105b направления может быть отображена на сенсорном экране 105a или может быть отдельной физической кнопкой, установленной, например, на приборной панели или рулевом колесе. Если кнопка 105b направления отображена на сенсорном экране 105a, то кнопка 105b направления является виртуальной. Если виртуальная кнопка 105b направления наложена на изображение, то виртуальная кнопка 105b направления может быть прозрачной и передвигаемой пользователем.
[0058] Хотя изобретение было применено к фарам, как обсуждалось выше, следует понимать, что изобретение может применяться к другим источникам света, таким как задние фонари транспортного средства (или любой другой источник света). Транспортные средства обычно включают в себя по меньшей мере два вида задних фонарей: тормозные огни, которые приводятся в действие при торможении транспортного средства, и задние габаритные огни, которые приводятся в действие одновременно с фарами (т.е. задние габаритные огни должны быть всегда активны при вождении транспортного средства в ночное время).
Реферат
Группа изобретений относится к фарам транспортного средства. Транспортное средство содержит фару, камеру, сенсорный экран и процессор(ы). Фара выполнена с возможностью создавать луч. Камера выполнена с возможностью захватывать изображения перед транспортным средством. Сенсорный экран выполнен с возможностью отображать изображения. Процессор(ы) выполнен(ы) с возможностью: (a) отображения изображений, захватываемых камерой, на сенсорном экране, (b) управления фарой для перемещения луча в соответствии с сенсорными вводами на изображениях и (c) запрещения выполнения пункта (b), когда транспортное средство превышает заданную скорость. Достигаестя повышение удобства управления адаптивными фарами. 2 н. и 18 з.п. ф-лы, 12 ил.
Комментарии