Пистолет для термического распыления с удаляемым наконечником сопла и способ его изготовления и использования - RU2594413C2
Код документа: RU2594413C2
Чертежи
Описание
С появлением плазменных пистолетов, имеющих широкие рабочие диапазоны за счет использования различных плазмообразующих сопел (см., например, методическое пособие IESC 2005 на плазмообразующие сопла для Eriplex), становится возможной способность плазменного пистолета создавать широкий спектр газотермических покрытий. Один пример - применение тепловых барьеров там, где требуются два покрывающих слоя. В таких барьерных покрытиях первый слой представляет собой связующий слой, обычно состоящий из суперсплава типа MCrAlY, который наносится при высоких скоростях частиц и относительно низких температурах частиц. Второе покрытие представляет собой керамический тепловой барьер, наносимый при низких скоростях частиц и высоких температурах частиц. При нанесении таких покрытий используются два различных плазменных сопла. Одно сопло представляет собой высокоэнтальпийное сопло с прямым стволом. Другое - высокоскоростное сопло Лаваля.
Для того чтобы создавать такую полноценную систему покрытия, либо требуются два отдельных пистолета, либо должны быть использованы два распылительных элемента, либо, в лучшем случае, нужна конструкция пистолета, регулируемая вручную, которая требует прерывание процесса покрытия. К тому же известные системы требуют ручной разборки по меньшей мере части для изменения конструкции и конкретнее сопла для того, чтобы изменять рабочий режим пистолета. Также в уровне техники известна способность автоматически изменять все пистолеты, при этом каждый пистолет выполнен с соответственной конструкцией пистолета для требуемого рабочего режима. Этот способ вызывает существенные усложнение конструкции и капитальные затраты на переключение подачи высокой энергии и газоснабжения в режим "активного" пистолета.
Так что необходим пистолет для термического распыления с взаимозаменяемыми наконечниками сопла и/или способ автоматического изменения сопел плазменного пистолета (или наконечников сопла) для облегчения изменения рабочего режима пистолета для удовлетворения различных применений систем многослойного покрытия.
Сущность изобретения
В соответствии с одним неограничивающим вариантом выполнения обеспечен пистолет или система для термического распыления, который преодолевает один или более недостатков традиционных систем.
В соответствии с одним неограничивающим вариантом выполнения обеспечен пистолет для термического распыления, содержащий по меньшей мере один из: по меньшей мере одного удаляемого наконечника сопла для распыления материала покрытия, по меньшей мере одного заменяемого наконечника сопла для распыления материала покрытия, по меньшей мере одного взаимозаменяемого наконечника сопла для распыления материала покрытия.
В вариантах выполнения наконечник сопла механически соединен с секцией анода пистолета для термического распыления.
В вариантах выполнения наконечник сопла электрически соединен с секцией анода пистолета для термического распыления.
В вариантах выполнения наконечник сопла является удаляемым от пистолета для термического распыления, при этом секция анода остается соединенной с пистолетом для термического распыления.
В вариантах выполнения наконечник сопла является удаляемым от пистолета для термического распыления с секцией анода.
В вариантах выполнения наконечник сопла включает секцию анода пистолета для термического распыления.
В вариантах выполнения пистолет для термического распыления представляет собой один из пистолета для плазменного распыления и пистолета для высокоскоростного газопламенного напыления HVOF.
В вариантах выполнения пистолет для термического распыления дополнительно содержит по меньшей мере одну линию подачи сырья, соединенную с участком пистолета для термического распыления.
В вариантах выполнения пистолет для термического распыления дополнительно содержит робот, причем пистолет для термического распыления установлен на рычаге робота.
В вариантах выполнения пистолет для термического распыления используется в совокупности со станцией или площадкой, хранящей множество наконечников сопла.
В вариантах выполнения пистолет для термического распыления используется в совокупности со станцией или площадкой, хранящей множество различных наконечников сопла.
В вариантах выполнения пистолет для термического распыления используется в совокупности со станцией или площадкой, хранящей множество наконечников сопла, размещенных в заданном положении, которое отличается от положения, содержащего подложку, покрываемую материалом покрытия.
В соответствии с одним неограничивающим вариантом выполнения обеспечена система пистолета для термического распыления, содержащая пистолет для термического распыления и по меньшей мере один механизм по меньшей мере одного из: хранения по меньшей мере одного наконечника сопла, устанавливаемого на пистолете для термического распыления и выполненного и размещенного с возможностью установки по меньшей мере одного наконечника сопла на пистолете для термического распыления.
В вариантах выполнения система дополнительно содержит управление, управляющее по меньшей мере одним из: перемещения пистолета для термического распыления и установки по меньшей мере одного наконечника сопла, устанавливаемого на пистолете для термического распыления.
В вариантах выполнения по меньшей мере один наконечник сопла представляет собой по меньшей мере один из: по меньшей мере одного удаляемого наконечника сопла для распыления материала покрытия, по меньшей мере одного заменяемого наконечника сопла для распыления материала покрытия, по меньшей мере одного взаимозаменяемого наконечника сопла для распыления материала покрытия.
В вариантах выполнения система дополнительно содержит робот, причем пистолет для термического распыления установлен на рычаге робота.
В вариантах выполнения система используется в совокупности со станцией или площадкой, хранящей по меньшей мере один механизм.
В вариантах выполнения система дополнительно содержит робот, причем пистолет для термического распыления установлен на рычаге робота, и управление, управляющее по меньшей мере одним из: перемещения пистолета для термического распыления и установки по меньшей мере одного наконечника сопла, устанавливаемого на пистолете для термического распыления.
В вариантах выполнения система дополнительно содержит робот, причем пистолет для термического распыления установлен на рычаге робота, и управление, управляющее по меньшей мере одним из: запрограммированного перемещения пистолета для термического распыления и запрограммированной или автоматической установки по меньшей мере одного наконечника сопла, устанавливаемого на пистолете для термического распыления.
В вариантах выполнения система дополнительно содержит робот, причем пистолет для термического распыления установлен на рычаге робота, и управление, управляющее перемещением пистолета для термического распыления и установкой по меньшей мере одного взаимозаменяемого наконечника сопла на пистолете для термического распыления.
В соответствии с одним неограничивающим вариантом выполнения обеспечена система пистолета для термического распыления, содержащая пистолет для термического распыления и по меньшей мере один механизм, содержащий по меньшей мере первый и второй наконечники сопла, при этом он является подвижным между: первым положением, в котором первый наконечник сопла используется для распыления материала покрытия, и вторым положением, в котором второй наконечник сопла используется для распыления материала покрытия.
В вариантах выполнения система дополнительно содержит управление, управляющее по меньшей мере одним из: перемещения пистолета для термического распыления и перемещения по меньшей мере одного механизма между первым и вторым положениями.
В вариантах выполнения система дополнительно содержит робот, причем пистолет для термического распыления установлен на рычаге робота.
В вариантах выполнения система используется в совокупности со станцией или площадкой, хранящей по меньшей мере один механизм.
В вариантах выполнения система используется в совокупности со станцией или площадкой, хранящей множество из по меньшей мере одного механизма.
В вариантах выполнения система дополнительно содержит робот, причем пистолет для термического распыления установлен на рычаге робота, и управление, управляющее перемещением по меньшей мере одного механизма между первым и второй положениями.
В вариантах выполнения система дополнительно содержит робот, причем пистолет для термического распыления установлен на рычаге робота, и управление, управляющее по меньшей мере одним из: запрограммированного перемещения пистолета для термического распыления и запрограммированного перемещения по меньшей мере одного механизма между первым и вторым положениями.
В вариантах выполнения система дополнительно содержит робот, причем пистолет для термического распыления установлен на рычаге робота, и управление, управляющее перемещением пистолета для термического распыления по меньшей мере одного механизма между первым и второй положениями.
В соответствии с одним неограничивающим вариантом выполнения обеспечен способ покрытия подложки, использующий пистолет для термического распыления, причем способ содержит этапы, на которых устанавливают по меньшей мере один наконечник сопла на пистолете для термического распыления и распыляют материал покрытия с по меньшей мере одним наконечником сопла.
В соответствии с одним неограничивающим вариантом выполнения обеспечен способ покрытия подложки, использующий пистолет для термического распыления, причем способ содержит этапы, на которых устанавливают с возможностью удаления по меньшей мере один наконечник сопла на пистолете для термического распыления и распыляют материал покрытия с по меньшей мере одним наконечником сопла.
В соответствии с одним неограничивающим вариантом выполнения обеспечен способ покрытия подложки, использующий пистолет для термического распыления, причем способ содержит этапы, на которых устанавливают по меньшей мере один наконечник сопла на пистолете для термического распыления, распыляют материал покрытия с по меньшей мере одним наконечником сопла, удаляют по меньшей мере один наконечник сопла от пистолета для термического распыления и устанавливают другой по меньшей мере один наконечник сопла на пистолете для термического распыления.
В соответствии с одним неограничивающим вариантом выполнения обеспечен способ покрытия подложки, использующий пистолет для термического распыления, причем способ содержит этапы, на которых перемещают пистолет для термического распыления в заданное положение и устанавливают по меньшей мере один наконечник сопла на пистолете для термического распыления.
В соответствии с одним неограничивающим вариантом выполнения обеспечен способ покрытия подложки, использующий пистолет для термического распыления, причем способ содержит этапы, на которых распыляют материал покрытия с по меньшей мере одним наконечником сопла, перемещают пистолет для термического распыления в заданное положение и удаляют по меньшей мере один наконечник сопла от пистолета для термического распыления.
В соответствии с одним неограничивающим вариантом выполнения обеспечен способ покрытия подложки, использующий пистолет для термического распыления, причем способ содержит этапы, на которых автоматически перемещают пистолет для термического распыления в заданное положение и автоматически удаляют по меньшей мере один наконечник сопла от пистолета для термического распыления.
В соответствии с одним неограничивающим вариантом выполнения обеспечен способ покрытия подложки, использующий пистолет для термического распыления, причем способ содержит этапы, на которых автоматически перемещают пистолет для термического распыления в заданное положение и автоматически устанавливают меньшей мере один наконечник сопла на пистолет для термического распыления.
В соответствии с одним неограничивающим вариантом выполнения обеспечен способ покрытия подложки, использующий пистолет для термического распыления, причем способ содержит этапы, на которых автоматически перемещают пистолет для термического распыления в заданное положение, автоматически удаляют по меньшей мере один наконечник сопла от пистолета для термического распыления и автоматически устанавливают другой по меньшей мере один наконечник сопла на пистолет для термического распыления.
В соответствии с одним неограничивающим вариантом выполнения обеспечен способ покрытия подложки, использующий пистолет для термического распыления, причем способ содержит этапы, на которых распыляют материал покрытия с по меньшей мере одним наконечником сопла, перемещают пистолет для термического распыления в заданное положение, удаляют по меньшей мере один наконечник сопла от пистолета для термического распыления, устанавливают другой по меньшей мере один наконечник сопла на пистолет для термического распыления и распыляют материал покрытия c другим по меньшей мере одним наконечником сопла.
В соответствии с одним неограничивающим вариантом выполнения обеспечен способ покрытия подложки, использующий пистолет для термического распыления, причем способ содержит этапы, на которых распыляют регулируемым образом материал покрытия с по меньшей мере одним наконечником сопла, перемещают регулируемым образом пистолет для термического распыления в заданное положение, удаляют регулируемым образом по меньшей мере один наконечник сопла от пистолета для термического распыления, устанавливают регулируемым образом другой по меньшей мере один наконечник сопла на пистолет для термического распыления и распыляют регулируемым образом материал покрытия с другим по меньшей мере одним наконечником сопла.
В соответствии с одним неограничивающим вариантом выполнения обеспечен способ покрытия подложки, использующий пистолет для термического распыления, причем способ содержит этапы, на которых распыляют материал покрытия с по меньшей мере одним наконечником сопла, автоматически перемещают пистолет для термического распыления в заданное положение, автоматически удаляют по меньшей мере один наконечник сопла от пистолета для термического распыления, автоматически устанавливают другой по меньшей мере один наконечник сопла на пистолет для термического распыления и распыляют материал покрытия с другим по меньшей мере одним наконечником сопла.
Другие примерные варианты выполнения и преимущества настоящего изобретения могут быть выявлены путем изучения настоящего раскрытия и сопровождающих чертежей.
Краткое описание чертежей
Настоящее изобретение дополнительно описано в подробном описании, которое следует далее, со ссылкой на приложенные чертежи путем неограничивающего примерного варианта выполнения настоящего изобретения, и причем:
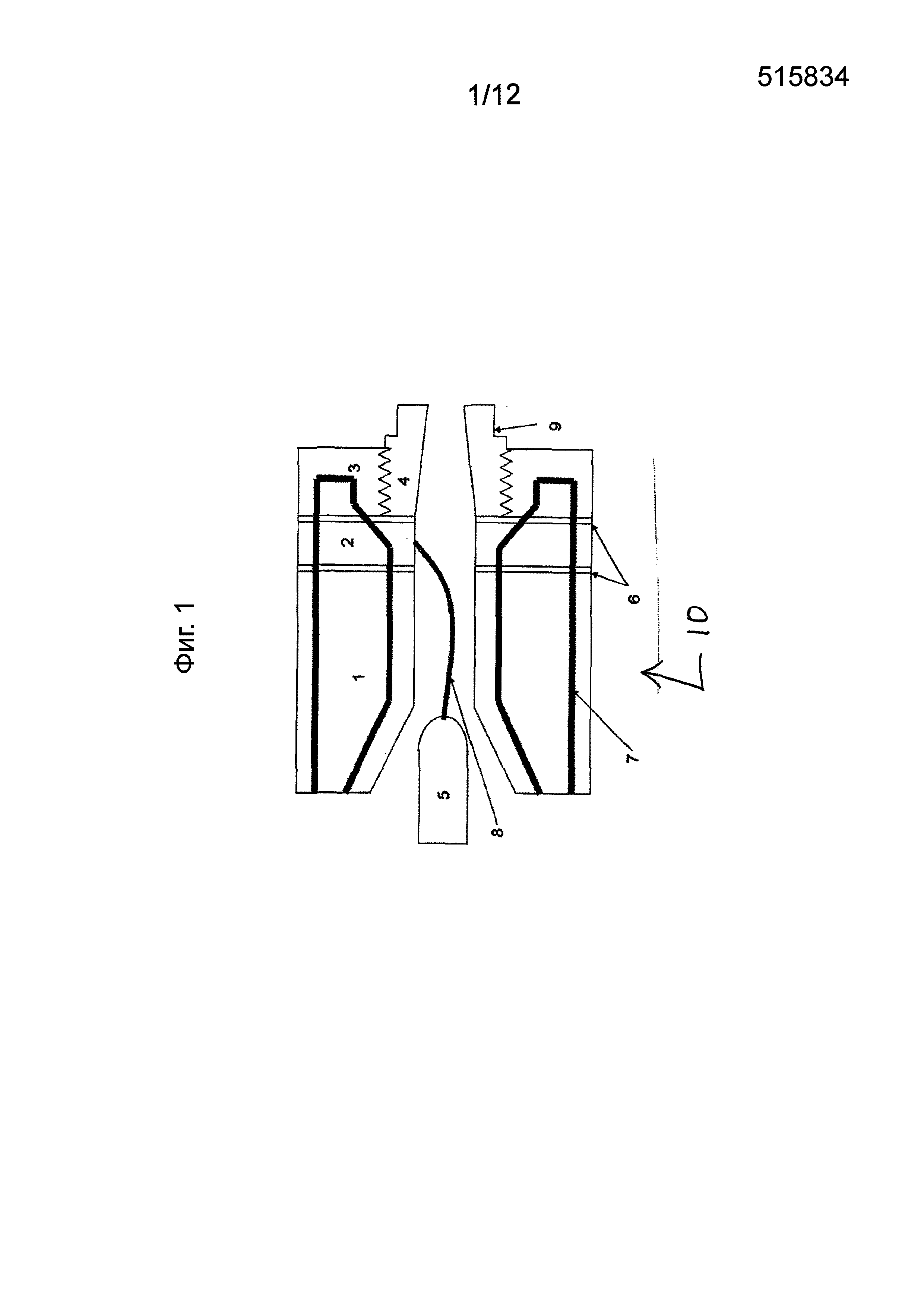
фиг. 1 показывает схематический вид в боковом поперечном сечении пистолета для термического распыления, имеющего наконечник сопла с резьбой в соответствии с одним неограничивающим вариантом выполнения изобретения;
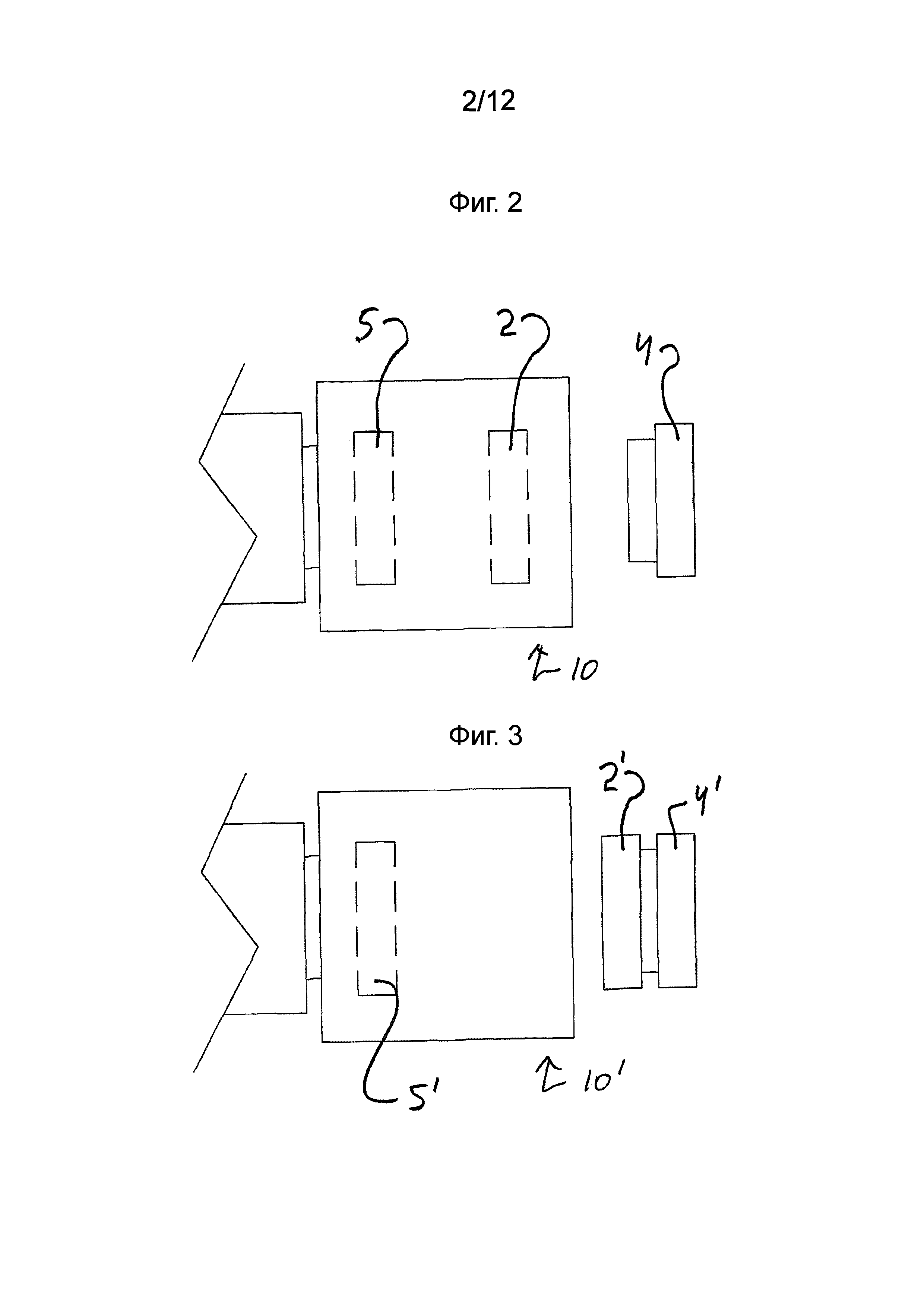
фиг. 2 показывает схематический вид сбоку установленного пистолета для термического распыления и показывающий наконечник сопла, удаленный от него, в соответствии с одним неограничивающим вариантом выполнения изобретения;
фиг. 3 показывает схематический вид сбоку установленного пистолета для термического распыления и показывающий конструкцию наконечника сопла (т. е. наконечник сопла и секция анода), удаленного от него, в соответствии с одним неограничивающим вариантом выполнения изобретения;
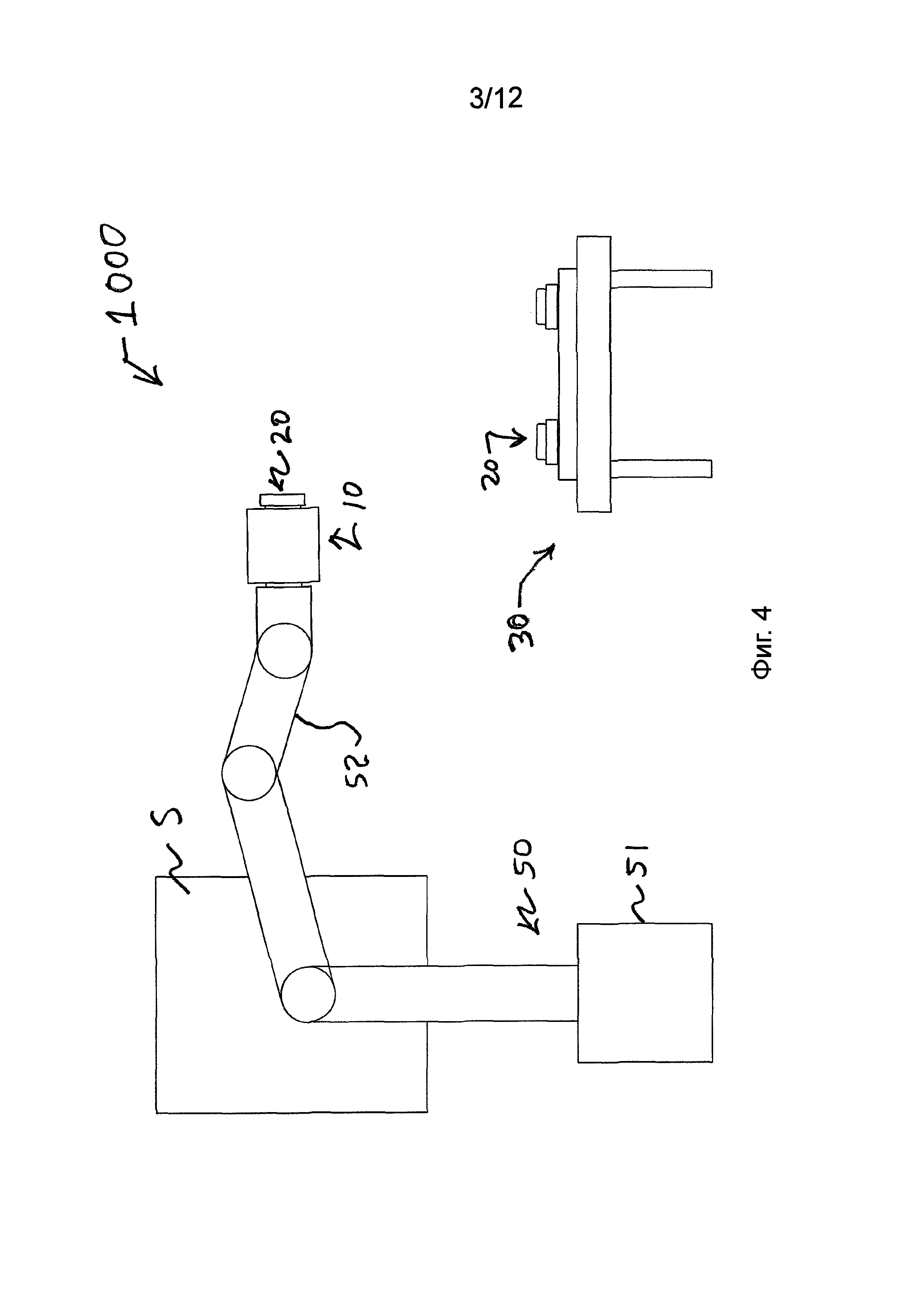
фиг. 4 показывает схематический вид сбоку области покрытия, имеющей систему термического распыления, и показывающий наконечник сопла, установленный на пистолете для термического распыления, в соответствии с одним неограничивающим вариантом выполнения изобретения;
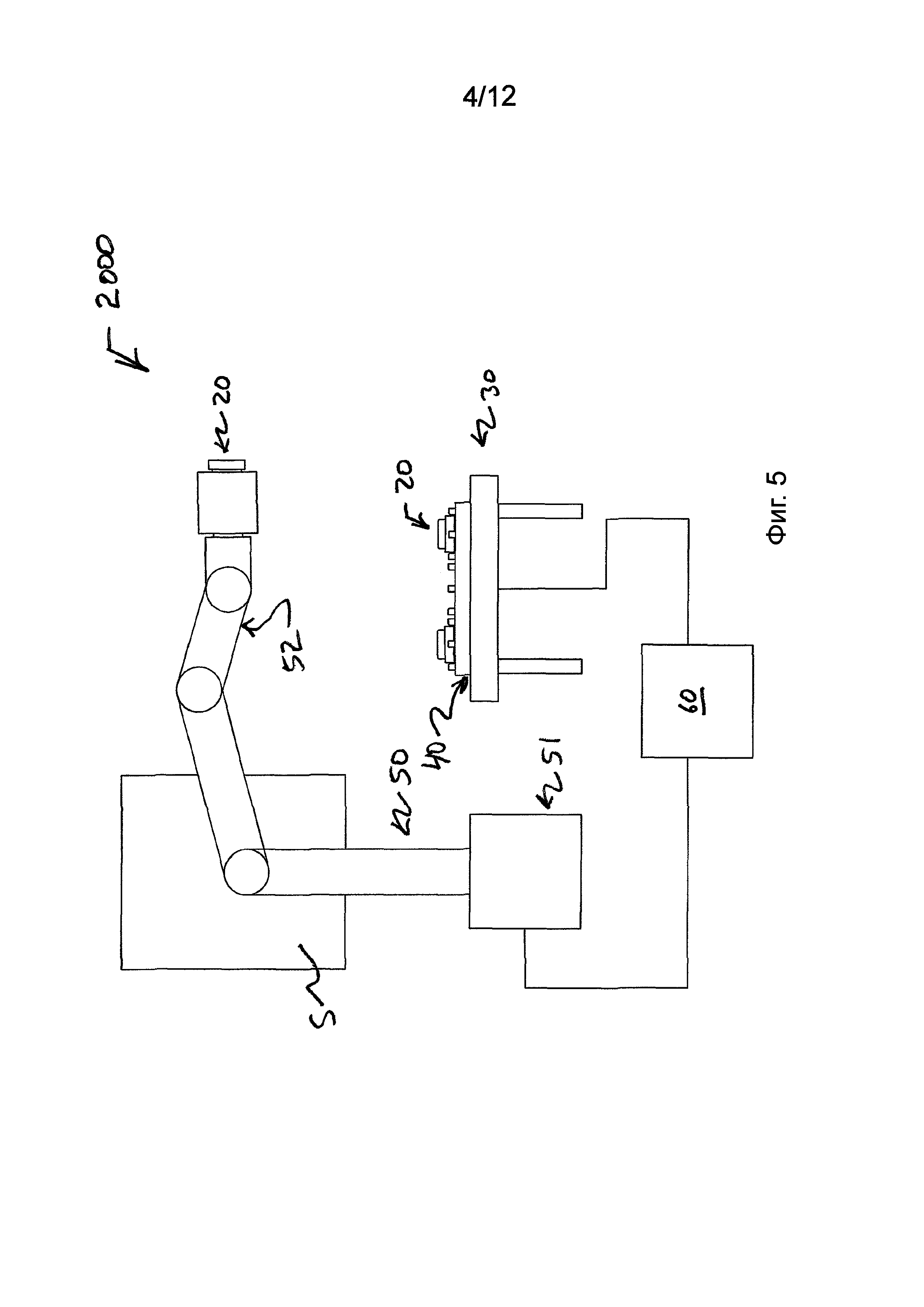
фиг. 5 показывает схематический вид сбоку области покрытия, имеющей систему термического распыления и управление, и показывающий наконечник сопла, установленный на пистолете для термического распыления в соответствии с другим неограничивающим вариантом выполнения изобретения;
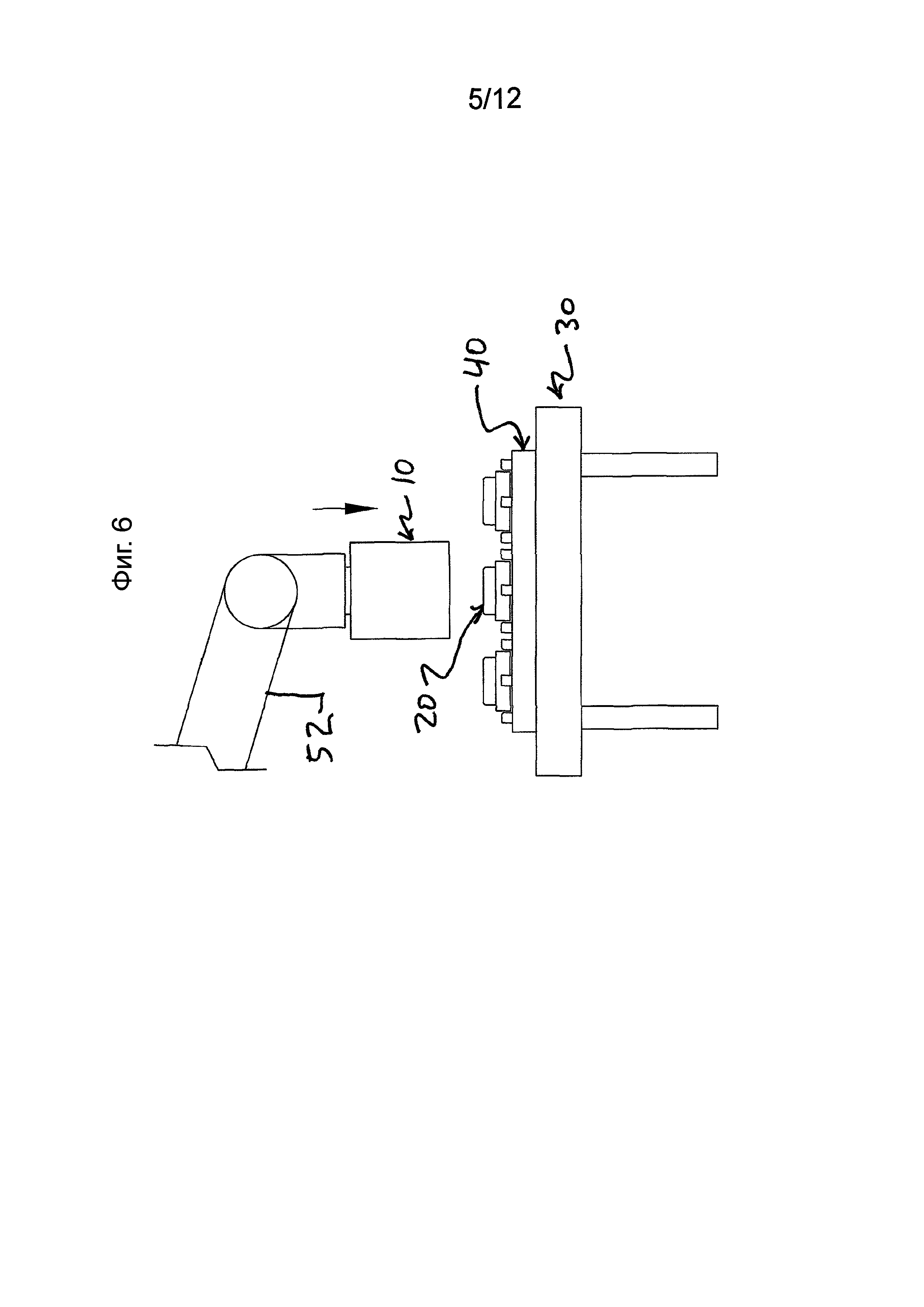
фиг. 6 показывает схематический вид сбоку системы термического распыления и показывающий пистолет для термического распыления, перемещающийся по направлению к станции, содержащей множественные наконечники сопла, которые могут быть установлены на ней, в соответствии с одним неограничивающим вариантом выполнения изобретения;
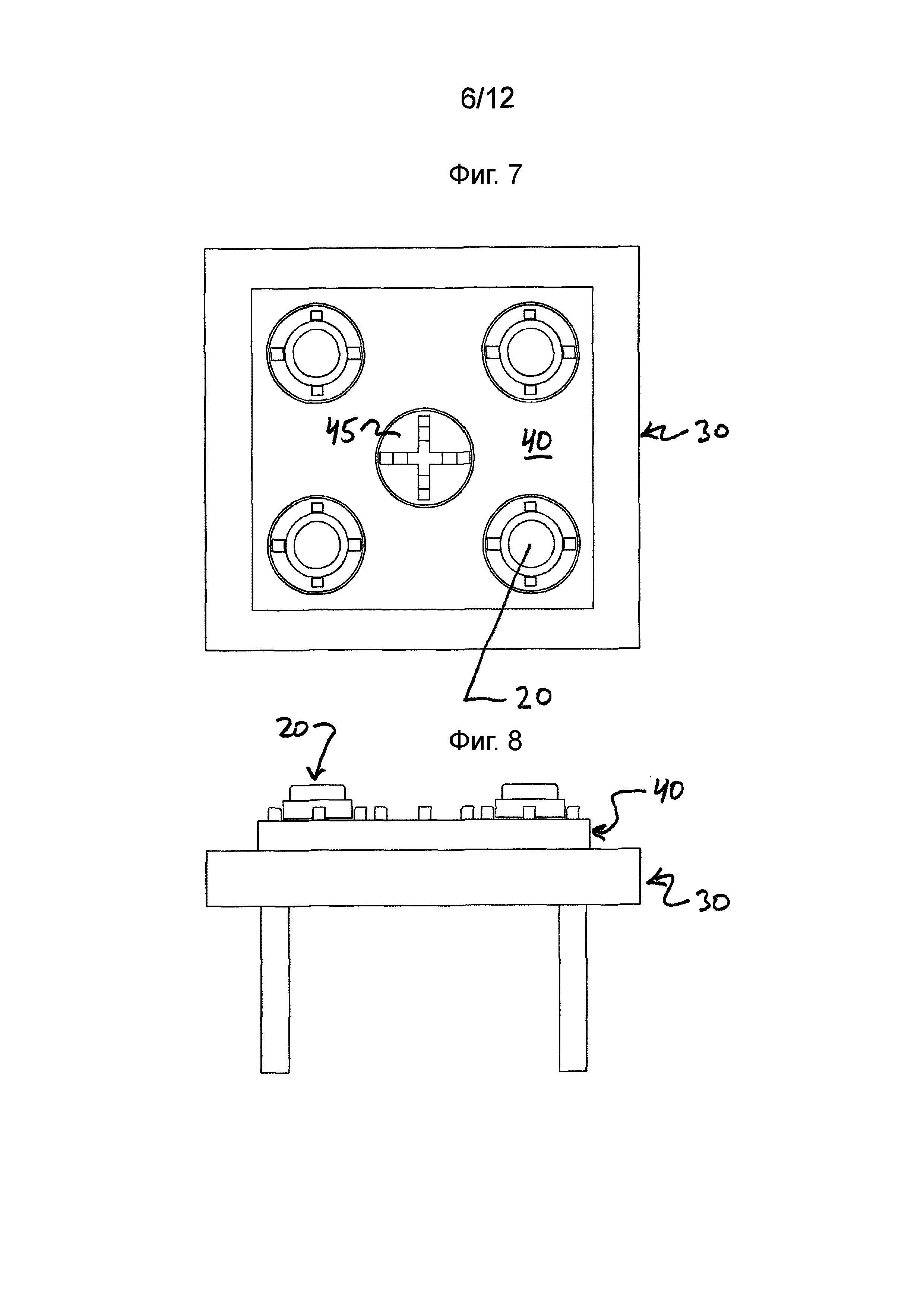
фиг. 7 показывает вид сверху станции, показанной на фиг. 6, но с одним из наконечников сопла, удаленным от него;
фиг. 8 показывает вид сбоку станции на фиг. 7;
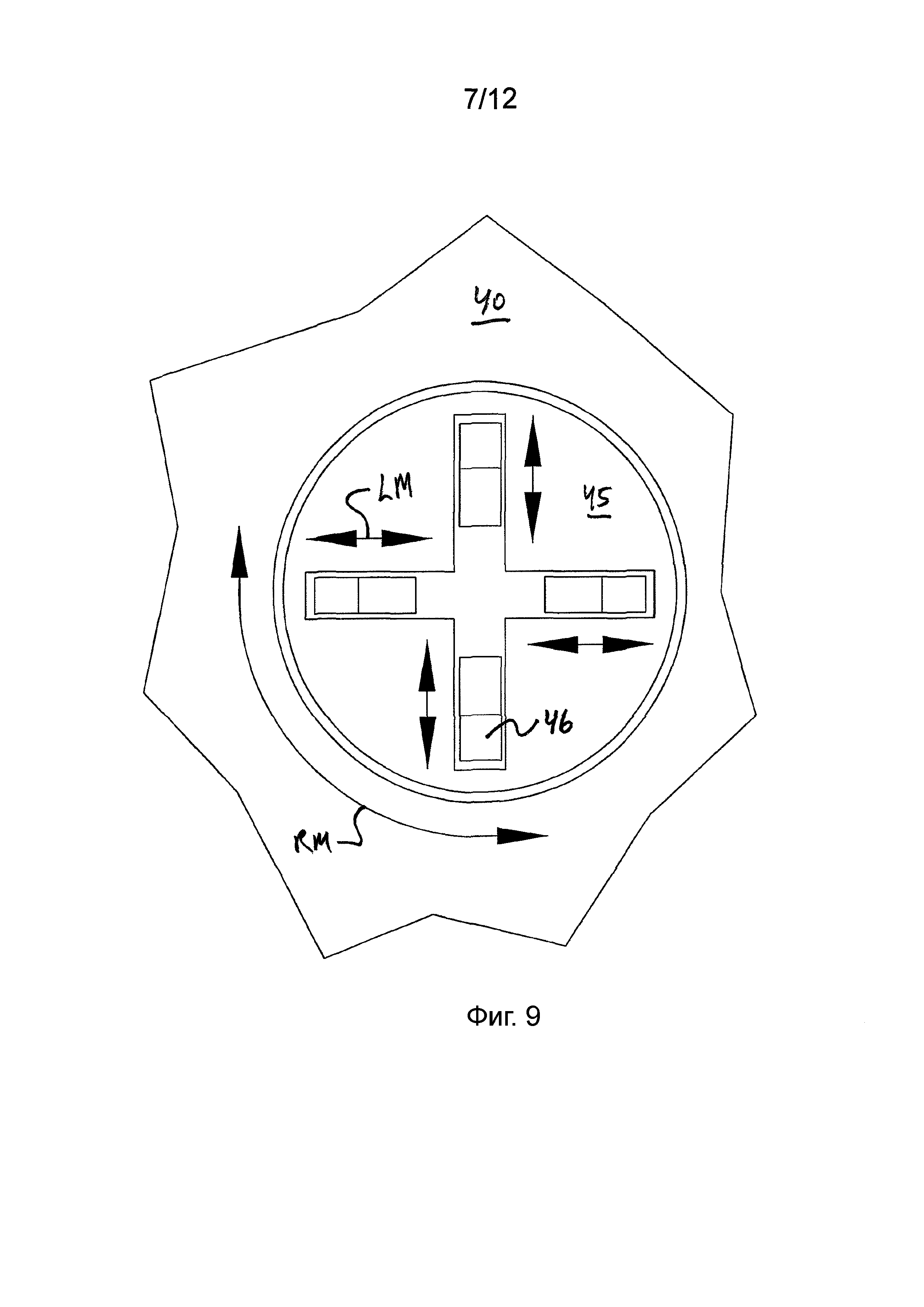
фиг. 9 показывает увеличенный частичный вид станции на фиг. 7. Стрелки, иллюстрирующие прямолинейное перемещение, показывают, как зажимающие элементы зажима или патрона могут перемещаться либо в направлении зажатия, либо в направлении освобождения. Стрелки, иллюстрирующие вращательное перемещение, показывают, как зажим или патрон может вращаться либо в направлении установки, либо в направлении снятия (т. е. удаления);
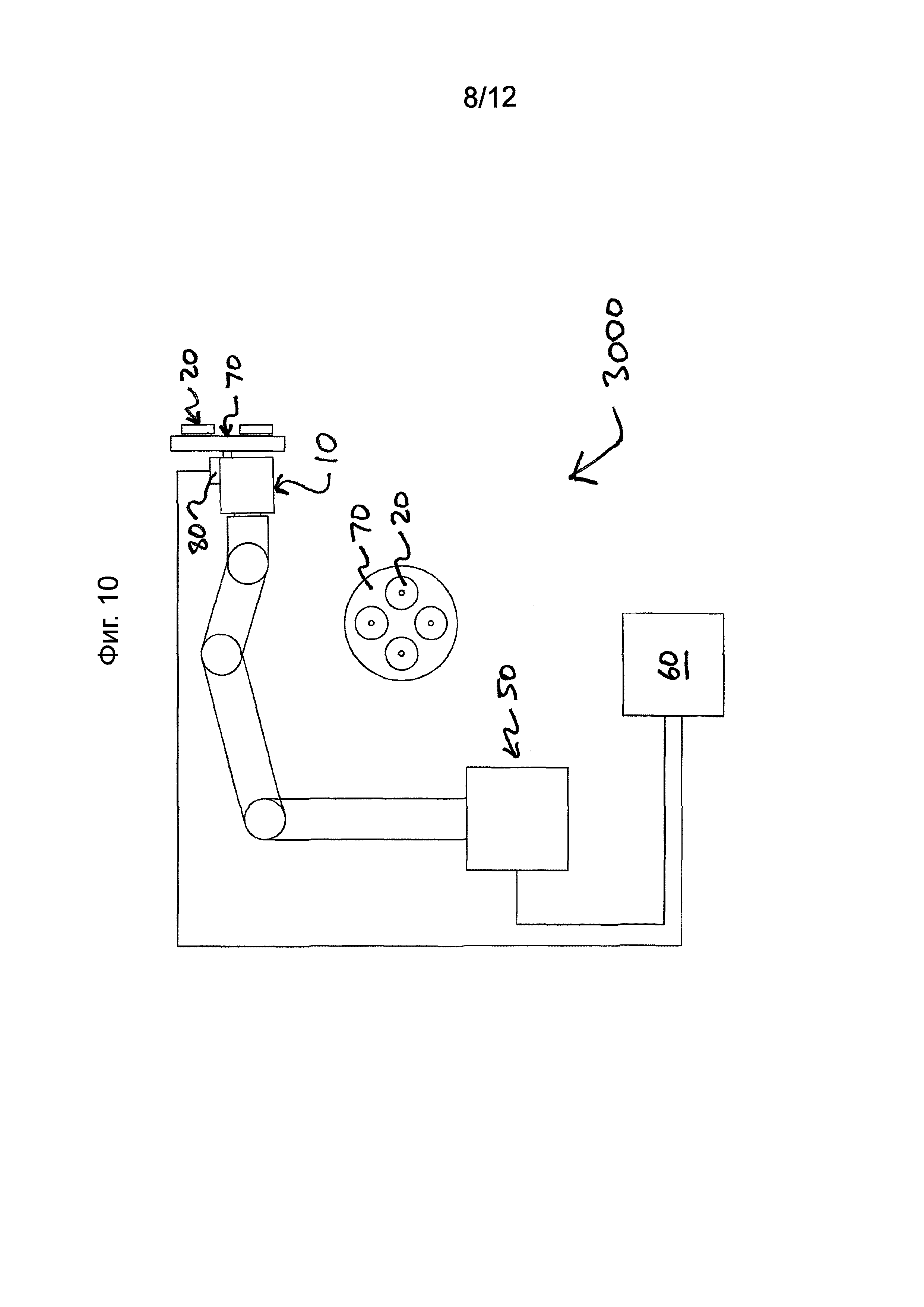
фиг. 10 показывает схематический вид сбоку системы термического распыления, использующей устройство, которое может перемещать два или более наконечников сопла в положение распыления в соответствии с одним неограничивающим вариантом выполнения изобретения. Чертеж в центре представляет собой вид этого устройства, когда оно не установлено на пистолете для термического распыления и ортогонально установленному положению, показанному на фиг. 10; и
фиг. 11-14 показывают блок-схемы, иллюстрирующие различные способы использования пистолета для термического распыления в соответствии с неограничивающими вариантами выполнения изобретения.
Подробное описание изобретения
Сведения, показанные здесь, представлены путем примера и в целях лишь иллюстрации вариантов выполнения настоящего изобретения и представлены ради обеспечения наиболее пригодного и легко понятного описания принципов и концептуальных аспектов настоящего изобретения. В этом отношении попытка показать конструктивные детали настоящего изобретения более подробно, чем необходимо для фундаментального понимания настоящего изобретения, не выполняется, при этом описание в сочетании с чертежами делает ясным для специалиста в области техники, как некоторые формы настоящего изобретения могут быть выполнены на практике.
В соответствии с одним неограничивающим вариантом выполнения изобретения, обеспечен пистолет 10 для термического распыления, который включает по меньшей мере один из: по меньшей мере одного удаляемого наконечника 4 сопла для распыления материала покрытия, по меньшей мере одного заменяемого наконечника 4 сопла для распыления материала покрытия, по меньшей мере одного взаимозаменяемого наконечника 4 сопла для распыления материала покрытия.
В соответствии с другим неограничивающим вариантом выполнения обеспечена система 1000 пистолета для термического распыления, содержащая пистолет 10 для термического распыления и по меньшей мере один механизм 30, содержащий по меньшей мере первый и второй наконечники 20 сопла и являющийся подвижным между первым положением, в котором первый наконечник сопла используется для распыления материала покрытия, и вторым положением, в котором второй наконечник сопла используется для распыления материала покрытия.
В соответствии с еще одним другим неограничивающим вариантом выполнения обеспечена система 1000 пистолета для термического распыления, содержащая пистолет 10 для термического распыления и по меньшей мере один механизм, например опору 30 и/или крепление 40, по меньшей мере одного из хранения по меньшей мере одного наконечника 20 сопла, устанавливаемого на пистолете 10 для термического распыления и выполненного и размещенного с возможностью установки по меньшей мере одного наконечника 20 сопла на пистолете 10 для термического распыления. Такая система предпочтительно является автоматизированной системой.
С помощью автоматизированной системы 2000 с взаимозаменяемым соплом работа сложных систем покрытия различными слоистыми материалами может быть выполнена за один рабочий этап или в станции 30 без необходимости ручного изменения конструкции и без потери производственного времени, связанного с ручным вмешательством. В дополнение время между нанесениями слоев уменьшается, и это может приводить к улучшенным адгезии между слоями и качеству всего покрытия.
На фиг. 1 схематически показан плазменный пистолет 10 с увеличенной работоспособностью, который выполнен с отдельной анодной или токопроводящей секцией и секцией образования сопла или плазмы. Токопроводящая секция включает нейтральную секцию 1, секцию 2 анода, основание 3 сопла, катод 5, который создает электрическую дугу 8, электрически изолированное и водонепроницаемое уплотнение 6 и канал 7 с охлаждающей водой. Секция образования сопла или плазмы образует вставку 4 сопла, которая может ввинчиваться в и вывинчиваться из основания 3 сопла. В этом случае на наконечнике 4 сопла размещены внешние резьбы, которые зацепляются с внутренними резьбами основания 3 сопла. Секция 2 анода служит в качестве положительного или + соединения для плазменной дуги 8 внутри ствола пистолета и может иметь несплошность или канавку, чтобы влиять на расположение дуги 8 в секции 2 анода. Наконечник 4 сопла определяет рабочий режим плазменного пистолета 10 и может иметь различные геометрии и длины. Таким образом, например, один наконечник 4 сопла может иметь геометрию или конфигурацию одного типа покрытия или рисунка распыления, а другой наконечник 4 сопла может иметь другую геометрию или конфигурацию для другого типа покрытия или рисунка распыления. Оба наконечника сопла могут, однако, иметь одинаковую секцию интерфейса (например, внешние резьбы одинакового размера) так, чтобы оба были способны устанавливаться на один и тот же плазменный пистолет 10.
Вариант выполнения на фиг. 1 также может быть преобразован под использование сопла, образующего два компонента или две части. Первая часть может иметь форму охлаждаемого водой основания 3, которое собирается или устанавливается в или на пистолет 10 и которое имеет резьбовое отверстие или интерфейс приема наконечника сопла. Вставка или наконечник 4 сопла, который имеет конкретную геометрию для определения рабочего режима плазменного пистолета, далее может быть ввинчен в основание 3 сопла для приведения в действие пистолета. В этом варианте выполнения основание 3 сопла, возможно, может быть удаляемым от плазменного пистолета 10 с наконечником 4 сопла.
Для обеспечения простого или автоматического удаления или установки наконечника 4 сопла открытая внешняя секция или диаметр 9 вставки или наконечника 4 сопла выполнена зажимаемой. В вариантах выполнения эта секция 9, возможно, может иметь канавку (не показана), в которую зажимающее устройство, например зажимающее устройство типа патрон или зажим, может захватывать или зажимать вставку 4 сопла. Патрон или зажим может предпочтительно быть приведен в действие шпинделем или двигателем так, что он может вращать зажатый наконечник 4 сопла. Например, зажимающее устройство может захватывать секцию 9 наконечника 4 и вращать его в одном направлении так, чтобы отвинчивать его (и удалять) от плазменного пистолета 10 и вращать его в противоположном направлении для ввинчивания наконечника 4 сопла в основание 3 сопла (и устанавливается так же). Когда зажимающее устройство используется в автоматизированном контексте, зажимающее устройство (зажимающая секция 9) и плазменный пистолет 10 имеют перемещения, согласованные так, что один наконечник 4 сопла удаляется от плазменного пистолета 10, а другой устанавливается на плазменном пистолете 10 управляемым или предварительно запрограммированным образом. В вариантах выполнения зажимающее устройство может использовать пружину (не показана), нагруженную в аксиальном направлении и которая может прикладывать силу с противоположной стороны пистолета. Пружина будет функционировать с возможностью позволять патрону перемещаться аксиально, когда наконечник 4 сопла завинчивается на или отвинчивается от плазменного пистолета 10.
Варианты выполнения на фиг. 2 и 3 показывают вариант выполнения изобретения, подобный варианту выполнения на фиг. 1, в котором наконечник 4 сопла является взаимозаменяемо удаляемым и устанавливаемым на плазменный пистолет 10, и другой вариант выполнения, в котором наконечник 4′ сопла и секция 2′ анода (которая может быть собрана или образована в виде цельного блока) является взаимозаменяемо удаляемыми и устанавливаемыми на плазменный пистолет 10. В одном из этих вариантов выполнения плазменный пистолет 10 может быть установлен на подвижном рычаге, например, роботизированной руке.
На фиг. 4 показана одна неограничивающая конструкция 1000, в которой множественные наконечники сопла могут располагаться или храниться на опоре 30, например опорном столе или крепежном опорном столе, в станции окраски распылением, в которой расположена подложка S. В примере на фиг. 4 плазменный пистолет 10 установлен на роботе 50, имеющем основание 51 и роботизированную руку 52. С помощью такой конструкции 1000 плазменный пистолет 10, установленный на рычаге 52, может перемещаться поверх опоры 30. При размещении вблизи опорного стола 30 оператор может вручную удалять или устанавливать наконечник 20 сопла на плазменном пистолете 10, тем самым переводя его из конфигурации хранения на опоре 30 в установленное положение на плазменном пистолете 10.
На фиг. 5-9 показана одна неограничивающая конструкция 2000 (смотри Фиг. 5), в которой множественные зажимающие устройства 45 (смотри фиг. 7), т. е. устройства типа патрон и шпиндель, могут быть размещены на креплении 40, размещенном на опоре 30 в станции окраски распылением, где расположена подложка S. В примере на фиг. 5-9 плазменный пистолет 10 установлен на роботе 50, имеющем основание 51 и роботизированную руку 52. С помощью такой конструкции 2000 плазменный пистолет 10, установленный на рычаге 52, может перемещаться поверх опоры 30. При размещении на креплении 40 и размещении на одном из зажимающих устройств 45, размещенных на нем, зажимающее устройство 45 может удалять или устанавливать наконечник 20 сопла на плазменном пистолете 10, тем самым переводя его из конфигурации хранения на креплении 40 в установленное положение на плазменном пистолете 10. Перемещения робота 50 и зажимающих устройств 45 могут регулироваться контроллером 60, который может быть запрограммирован выполнять операцию покрытия, в которой по меньшей мере один из наконечников 20 сопла устанавливается и/или удаляется от плазменного пистолета 10 по меньшей мере одним из зажимающих устройств 45 крепления 40.
На фиг. 7-9 показано одно неограничивающее крепление 40, имеющее множественные зажимающие устройства 45, т. е. устройства типа патрон и шпиндель, размещенные на опоре 30. Каждое зажимающее устройство 45 включает радиально и/или прямолинейно подвижные (вдоль направления LM) зажимающие элементы 46 для захвата наконечника 20 (например, секции 9 на фиг. 1) и может вращать в противоположных, т. е. по часовой стрелке и против часовой стрелки, направлениях вдоль направлений RM вращения.
Примерный путь использования конструкции 2000 на фиг. 5-9 представляет собой следующее: плазменный пистолет 10 без наконечника сопла перемещается роботом 50 за счет запрограммированных команд в одно из положений наконечника сопла на креплении 40 (смотри фиг. 6). Находясь на креплении 40, одно из зажимающих устройств 45, имеющих наконечник 20 сопла, зажатый в нем, вращают для ввинчивания наконечника 20 сопла в основание сопла плазменного пистолета 10 запрограммированными командами. После совмещения резьб (например, после контакта поверхности патрона с поверхностью пистолета) зажимающее устройство 45 освобождает наконечник 20 сопла. Далее плазменный пистолет 10 перемещается от крепления 40, освещается и распыляет первый покрывающий слой материала на подложку S посредством запрограммированных команд. Далее плазменный пистолет 10 перемещается обратно к креплению 40 в то же положение на креплении 40, где первая вставка сопла была завинчена на пистолет 10. Зажимающее устройство 45 зажимает (например, секцию 9 наконечника, который показан на фиг. 1) наконечник 20 сопла и далее отвинчивает наконечник 10 от основания сопла. Плазменный пистолет 10 перемещается за счет запрограммированных команд в положение другого наконечника 20 сопла. Другое зажимающее устройство 45 с наконечником 20 сопла, удерживаемым на нем, вращается для ввинчивания нового наконечника 20 сопла в основание сопла посредством запрограммированных команд. После совмещения резьб зажимающее устройство освобождает наконечник 20 сопла. Далее плазменный пистолет 10 перемещается от крепления 40, освещается и распыляет второй покрывающий слой материала на подложку S посредством запрограммированных команд. Этот процесс повторяется столько раз, сколько раз необходимо изменять наконечник сопла для завершения процесса покрытия подложки S.
Примерное крепление 40, которое описано, может предпочтительно манипулировать, откладывать или удерживать на нем почти любое количество наконечников 20 сопла (независимо, отличаются они или нет) согласно требованию конкретной операции или процесса. Крепление 40 также может включать столько различных наконечников 20 сопла, сколько допустимо для конкретного плазменного пистолета.
На фиг. 10 показана другая неограничивающая конструкция 3000, в которой наконечники 20 сопла размещены на креплении 70, которое может размещать каждый из наконечников 20 сопла в положении распыления или выравнивания (ствол наконечника сопла размещается в положение выравнивания со стволом плазменного пистолета) для распыления покрытия плазменным пистолетом. Как видно на виде, показанном в центре чертежа, крепление 70 может иметь форму круглой пластины, которая содержит множественные наклонно разнесенные наконечники 20 сопла. Каждый наконечник 20 сопла, установленный на пластину 70, может вращаться в требуемое положение двигателем 80, установленным вблизи плазменного пистолета 10. Двигатель 80 и робот 50 могут регулироваться контроллером 60, который может быть запрограммирован на выполнение операции покрытия, в которой по меньшей мере один из наконечников 20 сопла перемещается в положение выравнивания для распыления плазменным пистолетом 10 с помощью двигателя 80.
Несмотря на то, что вариант выполнения на фиг. 10 показывает конструкцию, в которой наконечники 20 сопла размещены на вращаемом креплении 70, которое может помещать каждый из наконечников 20 сопла в положение выравнивания для распыления плазменным пистолетом 10, изобретение также рассматривает прямоугольную пластину, которая прямолинейно или с возможностью скольжения перемещает пластину взад и вперед так, чтобы размещать два или более, например два или более различных, наконечников 20 сопла в положение выравнивания для распыления плазменным пистолетом 10. В любом случае перемещение пластины также может осуществляться, например, пневматически или электрически.
На фиг. 11 показан один неограничивающий способ изменения наконечника 4/20 сопла в соответствии с изобретением. На этапе 100 плазменный пистолет 10 перемещают в станцию изменения наконечника сопла, например, в положение 30 на фиг. 4. Это может предпочтительно происходить в заданное время на этапе 100. Далее на этапе 200 наконечник 4/20 сопла, установленный на плазменном пистолете 10, удаляют, и на плазменном пистолете 10 устанавливают новый наконечник 20 сопла. В дальнейшем на этапе 300 плазменный пистолет 10 перемещают в положение распыления. Это предпочтительно может быть осуществлено в заданном положении распыления на этапе 300.
На фиг. 12 показан другой неограничивающий способ изменения наконечника 4/20 сопла в соответствии с изобретением. На этапе 110 плазменный пистолет 10 перемещают в станцию изменения наконечника сопла, например, в положение 30 на фиг. 5 и 6. Это может предпочтительно происходить в заданное время на этапе 110. Далее на этапе 210 наконечник 4/20 сопла, установленный на плазменном пистолете 10, автоматически удаляют, и на плазменном пистолете 10 автоматически устанавливают новый наконечник 20 сопла. В дальнейшем на этапе 310 плазменный пистолет 10 перемещают в положение распыления. Это предпочтительно может быть осуществлено в заданном положении распыления на этапе 310.
На фиг. 13 показан другой неограничивающий способ изменения наконечника 4/20 сопла в соответствии с изобретением. На этапе 120 плазменный пистолет 10 размещают на роботе и перемещают регулируемым образом в станцию изменения наконечника сопла, например, в положение 30 на фиг. 5 и 6. Далее на этапе 220 наконечник 4/20 сопла, установленный на плазменном пистолете 10, автоматически удаляют регулируемым образом и новый наконечник 20 сопла автоматически устанавливают на плазменном пистолете 10 регулируемым образом. В дальнейшем на этапе 320 плазменный пистолет 10 перемещают в положение распыления регулируемым образом, и плазменный пистолет 10 выполняет операцию распыления/покрытия регулируемым образом.
На фиг. 14 показан уже другой неограничивающий способ изменения наконечника 4/20 сопла в соответствии с изобретением. На этапе 130 плазменный пистолет 10 перемещают в станцию изменения наконечника сопла. Это может происходить в заданное время на этапе 130. Далее на этапе 230 наконечник 4/20 сопла, уже выровненный с плазменным пистолетом 10, перемещают из положения выравнивания, и новый наконечник 20 сопла перемещают в положение выравнивания с плазменным пистолетом 10. В дальнейшем на этапе 330 плазменный пистолет 10 перемещают в положение распыления и покрывают подложку материалом покрытия. Этот способ предпочтительно выполняется автоматизированным и/или управляемым или запрограммированным образом.
Отметим, что материалы и размеры для наконечников сопла могут быть подобны материалам, используемым в известных плазменных пистолетах, которые не используют взаимозаменяемые/удаляемые наконечники сопла.
Отметим, что вышеупомянутые примеры обеспечены лишь в целях объяснения и никоим образом не должны рассматриваться как ограничение настоящего изобретения. Тогда как настоящее изобретение описано со ссылкой на примерный вариант выполнения, понятно, что слова, которые были использованы здесь, являются словами описания и иллюстрации, а не словами ограничения. Изменения могут быть выполнены в пределах объема охраны приложенной формулы изобретения и измененной, без отклонения от объема охраны и замысла настоящего изобретения в его аспектах. Несмотря на то, что настоящее изобретение описано здесь со ссылкой на особые средства, материалы и варианты выполнения, настоящее описание не предназначено для ограничения сведений, раскрытых здесь; точнее, настоящее изобретение распространяется на все функционально эквивалентные конструкции, способы и применения, которые находятся в пределах объема охраны приложенной формулы изобретения.
Реферат
Изобретение относится к системе и пистолету для термического распыления и может быть использовано для получения многослойных покрытий. Пистолет для термического распыления содержит удаляемый наконечник сопла для распыления материала покрытия и заменяемый наконечник сопла для распыления материала покрытия. Кроме того, пистолет содержит взаимозаменяемый наконечник сопла для распыления материала покрытия. Пистолет для термического распыления дополнительно содержит секцию анода. Наконечник сопла, когда установлен, расположен далее по потоку относительно анодной секции. Открытая внешняя секция или диаметр наконечника сопла выполнена зажимаемой для простого и/ автоматического удаления или установки наконечника сопла. Система пистолета для термического распыления содержит пистолет (10) для термического распыления и механизм хранения наконечника сопла, устанавливаемого на пистолете для термического распыления. Кроме того, система пистолета может включать механизм, содержащий первый и второй наконечники сопла. Механизм является подвижным между первым положением и вторым положением. В первом положении первый наконечник сопла используется для распыления материала покрытия. Во втором положении второй наконечник сопла используется для распыления материала покрытия. Способ покрытия подложки использует пистолет (10) для термического распыления. Способ включает установку наконечника сопла на пистолете (10) для термического распыления и распыление материала покрытия с наконечником сопла. Кроме того, удаляют наконечник сопла от пистолета для термического распыления и устанавливают другой наконечник сопла.
Формула
по меньшей мере одного удаляемого наконечника сопла для распыления материала покрытия; по меньшей мере одного заменяемого наконечника сопла для распыления материала покрытия, по меньшей мере одного взаимозаменяемого наконечника сопла для распыления материала покрытия, при этом пистолет для термического распыления дополнительно содержит секцию анода, отличающийся тем, что наконечник сопла, когда установлен, расположен далее по потоку относительно анодной секции, при этом открытая внешняя секция или диаметр наконечника сопла выполнена зажимаемой для простого и автоматического удаления или установки наконечника сопла.
по меньшей мере одного наконечника сопла, устанавливаемого на пистолете для термического распыления.
Комментарии