Способ и устройство для программируемого управления траекторией движения пользователя к лифту/эскалатору - RU2642150C2
Код документа: RU2642150C2
Чертежи



Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА СВЯЗАННЫЕ ЗАЯВКИ
[0001] Настоящая заявка основана на заявке №201510717742.0 на выдачу китайского патента, все содержание которой включено в настоящий документ, и по которой испрошен приоритет. Данная заявка была подана 29 октября 2015 года.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение, в целом, относится к области технологии компьютерных коммуникаций и, более конкретно, к способу и устройству для программируемого управления траекторией движения пользователя к лифту/эскалатору.
УРОВЕНЬ ТЕХНИКИ
[0003] По мере развития и популяризации компьютерной технологии географические информационные системы (ГИС), а также «Цифровая Земля», «Цифровой город», «Цифровое здание», разрабатываемые на основе ГИС, играют все более и более важную роль в повседневной жизни людей.
[0004] Сегодня в области ГИС получили значительное развитие приложения для навигации в помещениях. Навигация в помещениях может помочь людям, находящихся в крупных зданиях, таким как покупателям крупных торговых центров, определять свое местонахождение и места, которые они хотят посетить, с помощью функции точного позиционирования. То есть покупатели могут легко найти определенные места, такие как эскалатор, туалет, нужный отдел и тому подобное в больших зданиях с помощью навигации в помещениях.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] С учетом вышесказанного, настоящее изобретение предусматривает способ и устройство для программируемого управления траекторией движения пользователя к лифту/эскалатору, предназначенное для решения проблемы в соответствующей области техники, заключающейся в том, что людям сложно находить лифт/эскалатор в больших помещениях.
[0006] В соответствии с первым аспектом осуществления данного изобретения, заявлен способ программируемого управления траекторией движения пользователя к лифту/эскалатору, включающий в себя:
[0007] определение текущего местоположения пользователя;
[0008] запрос номера начального этажа и номера целевого этажа от пользователя;
[0009] получение данных маршрута для прибытия к целевому лифту/эскалатору, на основании текущего местоположения пользователя, номера начального этажа и номера елевого этажа; и
[0010] управление траекторией движения пользователя к целевому лифту/эскалатору на основании данных маршрута.
[0011] Дополнительно, текущее местоположение пользователя определяется с помощью любого из следующих способов:
[0012] определение текущего местоположения пользователя с помощью системы глобального позиционирования;
[0013] определение текущего местоположения пользователя с помощью технологии мобильного позиционирования; и
[0014] определение текущего местоположения пользователя с помощью технологии позиционирования внутри помещений.
[0015] Дополнительно, запрос номера начального этажа и номера целевого этажа пользователя для поездки на лифте/эскалаторе включает в себя:
[0016] запуск приложения АРР для навигации внутри помещений; и
[0017] получение номера начального этажа и номера целевого этажа, введенных пользователем с помощью приложения АРР для навигации внутри помещений.
[0018] Дополнительно, приложение АРР для навигации внутри помещений запускается любым из следующих способов:
[0019] запуск приложения АРР для навигации внутри помещений в ответ на команды управления, введенные пользователем, для запуска приложения АРР для навигации внутри помещений; или
[0020] запуск приложения АРР для навигации внутри помещений путем отслеживания того, что текущее местоположение пользователя находится внутри предварительно установленного диапазона расстояний.
[0021] Дополнительно, получение данных маршрута для прибытия к целевому лифту/эскалатору на основании текущего местоположения пользователя, номера начального этажа и номера целевого этажа включает в себя:
[0022] определение типа целевого лифт/эскалатора для целевого лифта/эскалатора, на основании разницы между номером начального этажа и номером целевого этажа;
[0023] получение местоположения каждого лифта/эскалатора с типом целевого лифта/эскалатора на начальном этаже; и
[0024] получение данных маршрута для прибытия к ближайшему лифту/эскалатору с типом целевого лифта/эскалатора, на основании текущего местоположения пользователя и всех местоположений лифтов/эскалаторов с типом целевого лифта/эскалатора.
[0025] Дополнительно, определение типа целевого лифта/эскалатора, на основании разницы между номером начального этажа и номером целевого этажа, включает в себя:
[0026] расчет значения разницы между номером начального этажа и номером целевого этажа;
[0027] принятие решения, является ли значение разницы меньше, чем предварительно установленный порог;
[0028] если значение разницы меньше, чем предварительно установленный порог, определение эскалатора в качестве типа целевого лифта/эскалатора; и
[0029] если значение разницы больше или равно предварительно установленному порогу, определение лифта в качестве типа целевого лифта/эскалатора.
[0030] Дополнительно, способ далее включает в себя:
[0031] когда типом целевого лифта/эскалатора является эскалатор, принятие решения, ехал ли пользователь на целевом эскалаторе;
[0032] если пользователь не ехал на целевом эскалаторе, определение второго эскалатора;
[0033] получение данных второго маршрута для прибытия ко второму эскалатору; и
[0034] управление траекторией движения пользователя ко второму эскалатору, на основании данных второго маршрута.
[0035] Дополнительно, принятие решения, ехал ли пользователь на целевом эскалаторе, включает в себя:
[0036] принятие решения, ехал ли пользователь на целевом эскалаторе, на основании а контролируемого видеоряда; или
[0037] принятие решения, ехал ли пользователь на целевом эскалаторе, путем опроса пользователя.
[0038] В соответствии со вторым аспектом осуществления данного изобретения, заявлено устройство для программируемого управления траекторией движения пользователя к лифту/эскалатору, включающее в себя:
[0039] модуль определения местоположения, сконфигурированный для определения текущего местоположения пользователя;
[0040] модуль определения этажа, сконфигурированный для запроса номера начального этажа и номера целевого этажа пользователя;
[0041] первый модуль определения маршрута, сконфигурированный для получения данных маршрута для прибытия к целевому лифту/эскалатору, на основании текущего местоположения пользователя, номера начального этажа и номера целевого этажа; и
[0042] первый направляющий модуль, сконфигурированный для управления траекторией движения пользователя для поездки на целевом лифте/эскалаторе, на основании данных маршрута.
[0043] Дополнительно, модуль определения местоположения включает в себя:
[0044] первый субмодуль определения, сконфигурированный для определения текущего местоположения пользователя с помощью системы глобального позиционирования;
[0045] второй субмодуль определения, сконфигурированный для определения текущего местоположения пользователя с помощью технологии мобильного позиционирования; и
[0046] третий субмодуль определения, сконфигурированный для определения текущего местоположения пользователя с помощью технологии позиционирования внутри помещений.
[0047] Дополнительно, модуль определения этажа включает в себя:
[0048] субмодуль запуска, сконфигурированный для запуска приложения АРР для навигации внутри помещений; и
[0049] субмодуль приема, сконфигурированный для запроса номера начального этажа и номера целевого этажа, вводимых пользователем с помощью приложения АРР для навигации внутри помещений.
[0050] Дополнительно, субмодуль запуска включает в себя:
[0051] первый блок запуска, сконфигурированный для запуска приложения АРР для навигации внутри помещений в ответ на управляющие команды, введенные пользователем для запуска приложения АРР для навигации внутри помещений; или
[0052] второй блок запуска, сконфигурированный для запуска приложения АРР для навигации внутри помещений путем отслеживания того, что текущее местоположение пользователя находится внутри предварительно установленного диапазона расстояний.
[0053] Дополнительно, первый модуль определения включает в себя:
[0054] субмодуль определения типа лифта/эскалатора, сконфигурированный для определения типа целевого лифта/эскалатора для целевого лифта/эскалатора, на основании разницы между номером начального этажа и номером целевого этажа;
[0055] субмодуль получения местоположения, сконфигурированный для получения местоположения каждого лифта/эскалатора с типом целевого лифта/эскалатора на начальном этаже; и
[0056] субмодуль планирования маршрута, сконфигурированный для получения данных маршрута с целью прибытия к ближайшему лифту/эскалатору с типом целевого лифта/эскалатора, на основании текущего местоположения пользователя и всех местоположений лифтов/эскалаторов с типом целевого лифта/эскалатора.
[0057] Дополнительно, субмодуль определения типа лифта/эскалатора включает в себя:
[0058] блок расчета, сконфигурированный для расчета значения разницы между номером начального этажа и номером целевого этажа;
[0059] блок принятия решения, сконфигурированный для принятия решения, является ли значение разницы меньшим, чем предварительно установленный порог;
[0060] первый блок определения типа, сконфигурированный для определения эскалатора в качестве типа целевого лифта/эскалатора, если значение разницы меньше, чем предварительно установленный порог; и
[0061] второй блок определения типа, сконфигурированный для определения лифта в качестве типа целевого лифта/эскалатора, если значение разницы меньше предварительно установленного порога или равно ему.
[0062] Дополнительно, устройство далее включает в себя:
[0063] модуль принятия решения о поездке, сконфигурированный для принятия решения, поехал ли пользователь на целевом эскалаторе, если типом целевого лифта/эскалатора является эскалатор;
[0064] модуль определения эскалатора, сконфигурированный для определения второго эскалатора, если пользователь не поехал на целевом эскалаторе;
[0065] второй модуль определения маршрута, сконфигурированный для получения данных второго маршрута для прибытия ко второму эскалатору; и
[0066] второй модуль управления траекторией движения, сконфигурированный для управления траекторией движения пользователя ко второму эскалатору, на основании данных второго маршрута.
[0067] Дополнительно, модуль решения о поездке включает в себя:
[0068] первый субмодуль принятия решения, сконфигурированный для принятия решения, поехал ли пользователь на целевом эскалаторе, на основании контролируемого видеоряда; или
[0069] второй субмодуль принятия решения, сконфигурированный для принятия решения, поехал ли пользователь на целевом эскалаторе, путем опроса пользователя.
[0070] Техническое решение в соответствии с вариантами осуществления данного изобретения может иметь следующие преимущества.
[0071] В данном изобретении, используя базу данных ГИС большого здания, терминал пользователя может автоматически рекомендовать данные лифта/эскалатора пользователю, а также может генерировать данные маршрута для прибытия к целевому лифту/эскалатору, а также может направлять пользователя к целевому лифту/эскалатору, на основании данных маршрута. Тем самым он может быстро и через программу предоставить навигационную услугу пользователю, а также избавить пользователя от проблемы поиска лифта/эскалатора в большом здании, экономя время и повышая комфорт пользователя.
[0072] В данном изобретении, текущее местоположение пользователя может определяться, используя систему глобального позиционирования, технологию мобильного позиционирования или технологию позиционирования внутри помещений. Тем самым может обеспечиваться точность определения текущего местоположения пользователя с тем, чтобы точно рекомендовать пользователю целевой лифт/эскалатор.
[0073] В данном изобретении после запуска приложения АРР для навигации внутри помещений, номер начального этажа и номер целевого этажа, введенные пользователем, могут быть получены через пользовательский интерфейс, предоставляемый приложением АРР для навигации внутри помещений. Тем самым данные этажа могут быть получены более точно.
[0074] В данном изобретении после обнаружения того, что пользователь вошел в определенное большое здание, терминал пользователя может автоматически запускать приложение АРР для навигации внутри помещений, загружать данные ГИС этого здания и через программу запускать режим рекомендации лифта/эскалатора. Пользователь может также вручную запустить приложение АРР для навигации внутри помещений и запросить терминал пользователя предоставить услугу по рекомендации лифта/эскалатора. Такой принцип работы удобен.
[0075] В данном изобретении терминал пользователя может через программу выбрать самый удобный лифт/эскалатор для пользователя, на основании текущего местоположения пользователя, номера начального этажа и номера целевого этажа, сгенерировать соответствующие данные маршрута для управления траекторией движения пользователя к лифту/эскалатору по кратчайшему маршруту. Тем самым он может сэкономить время поиска лифта/эскалатора для пользователя.
[0076] В данном изобретении после запроса номера начального этажа и номера целевого этажа рассчитывается разница между ними. Если разница относительно велика, пользователю рекомендуется лифт; а если разница относительно мала, пользователю рекомендуется эскалатор. Тем самым он может разумно и в полном объеме планировать использование ресурсов лифтов/эскалаторов.
[0077] В данном изобретении, после того как пользователь прибывает к целевому эскалатору, решается, поехал ли пользователь на целевом эскалаторе, как рекомендовалось. Если определено, что направление движения эскалатора не то, которое ожидалось пользователем, для пользователя автоматически планируются данные маршрута к другому эскалатору. Тем самым, если пользователь выясняет, что направление движения эскалатора не соответствует ожидаемому, пользователь может, тем не менее, быстро прибыть ближайшему эскалатору с нужным направлением движения.
[0078] В данном изобретении контролируемый видеоряд может использоваться для решения, поехал ли пользователь на целевом эскалаторе. В другом варианте, если пользователь прибывает к целевому эскалатору, предусмотрен пользовательский интерфейс для опроса пользователя, поедет ли он на целевом эскалаторе, чтобы точно принять решение, поехал ли пользователь на целевом эскалаторе.
[0079] Следует понимать, что как вышеизложенное общее описание, так и последующее детальное описание являются всего лишь иллюстративными и поясняющими и не ограничивают объем изобретения, как оно заявлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0080] Чертежи, включенные в настоящую заявку и составляющие ее часть, иллюстрируют варианты осуществления в соответствии с изобретением и вместе с описанием служат для разъяснения принципов изобретения.
[0081] Фиг. 1 представляет собой блок-схему, иллюстрирующую способ программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0082] Фиг. 2 представляет собой блок-схему, иллюстрирующую другой способ программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0083] Фиг. 3 представляет собой схематическое изображение, иллюстрирующее сценарий применения программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0084] Фиг. 4-1 представляет собой схематическое изображение, иллюстрирующее сценарий применения программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0085] Фиг. 4-2 представляет собой схематическое изображение, иллюстрирующее другой сценарий применения программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0086] Фиг. 4-3 представляет собой схематическое изображение, иллюстрирующее другой сценарий применения программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0087] Фиг. 5 представляет собой блок-схему, иллюстрирующую другой способ программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0088] Фиг. 6 представляет собой блок-схему, иллюстрирующую другой способ программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
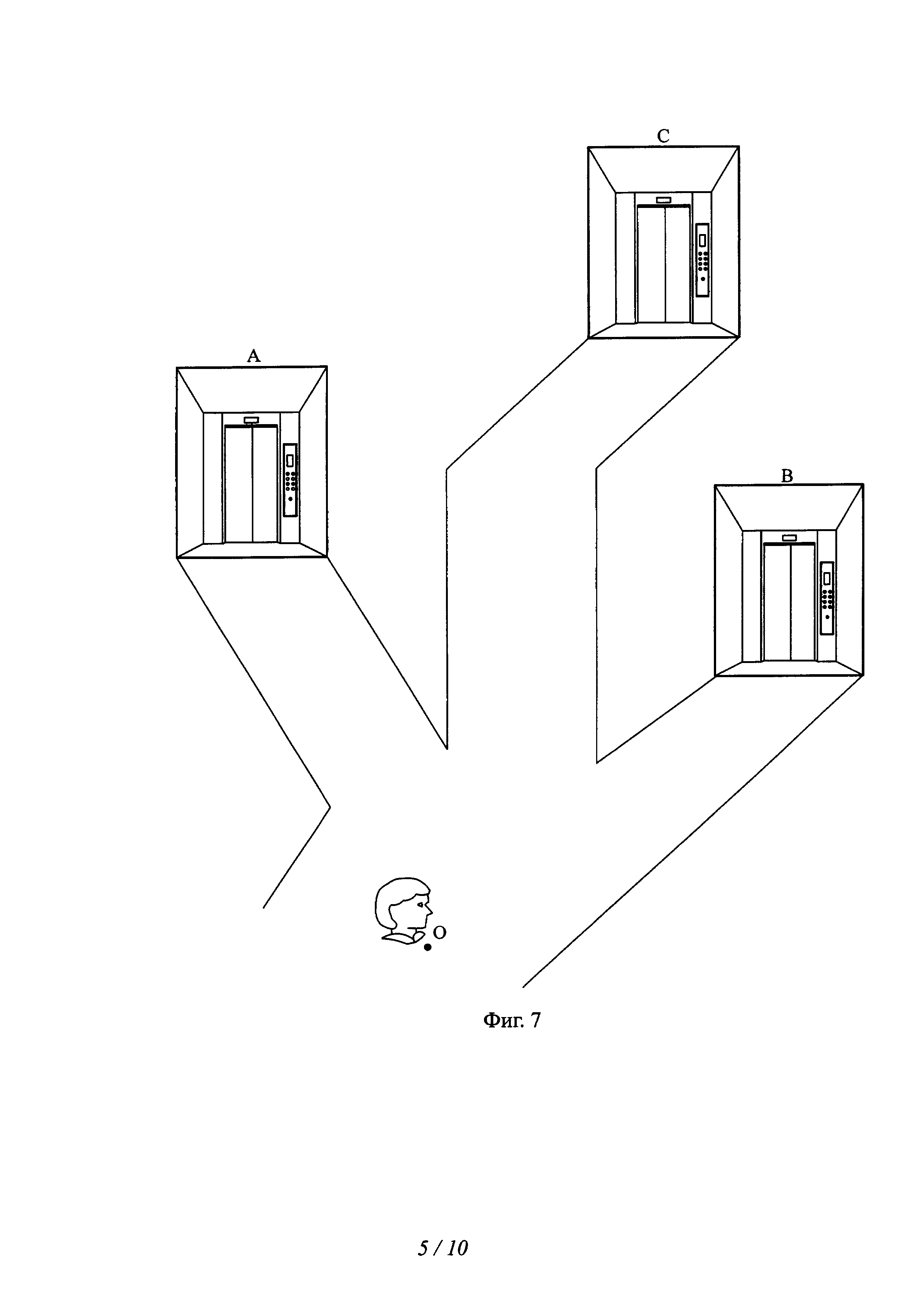
[0089] Фиг. 7 представляет собой схематическое изображение, иллюстрирующее сценарий применения программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0090] Фиг. 8 представляет собой блок-схему, иллюстрирующую другой способ программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
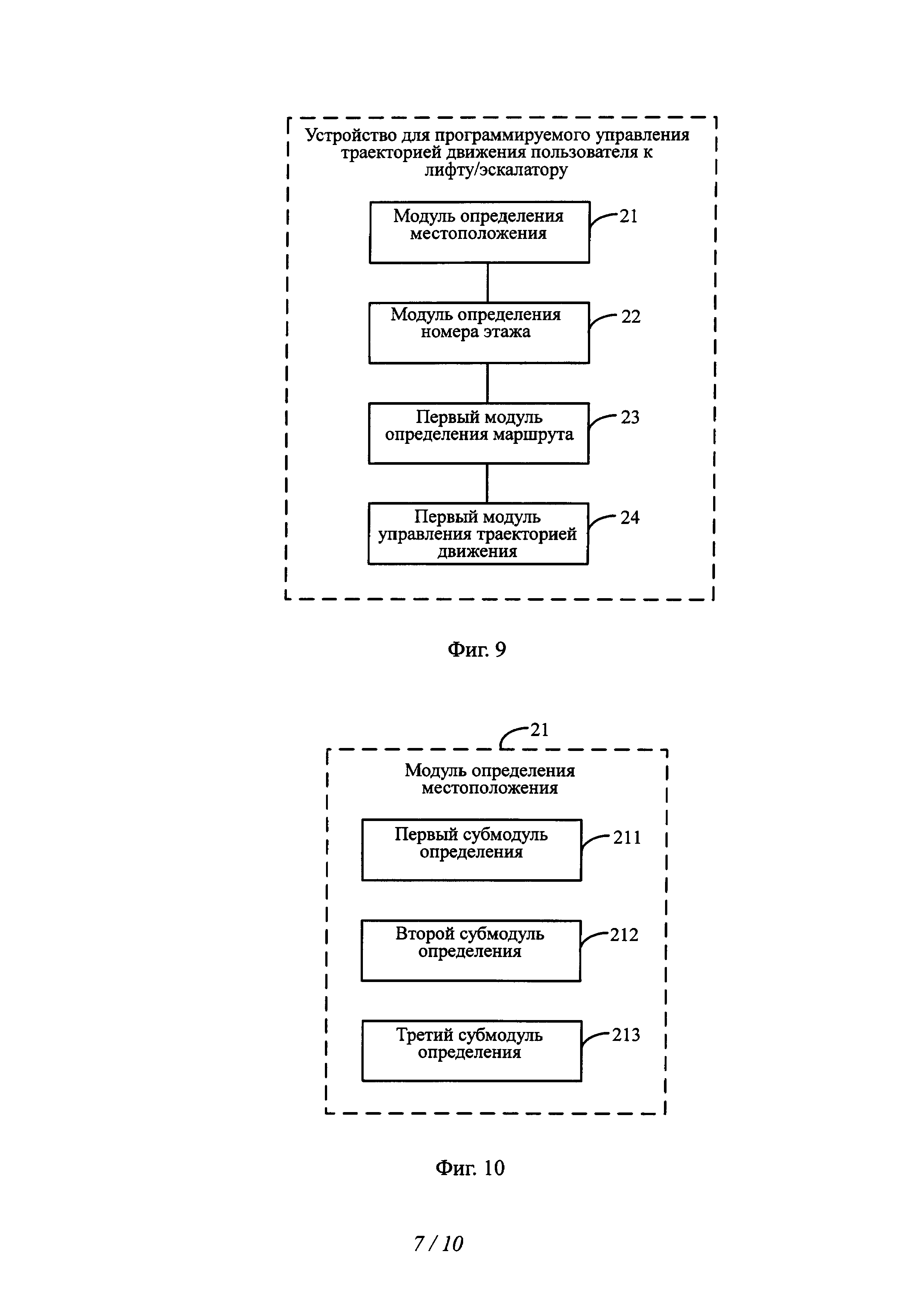
[0091] Фиг. 9 представляет собой блок-схему устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0092] Фиг. 10 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0093] Фиг. 11 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0094] Фиг. 12 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0095] Фиг. 13 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0096] Фиг. 14 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0097] Фиг. 15 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
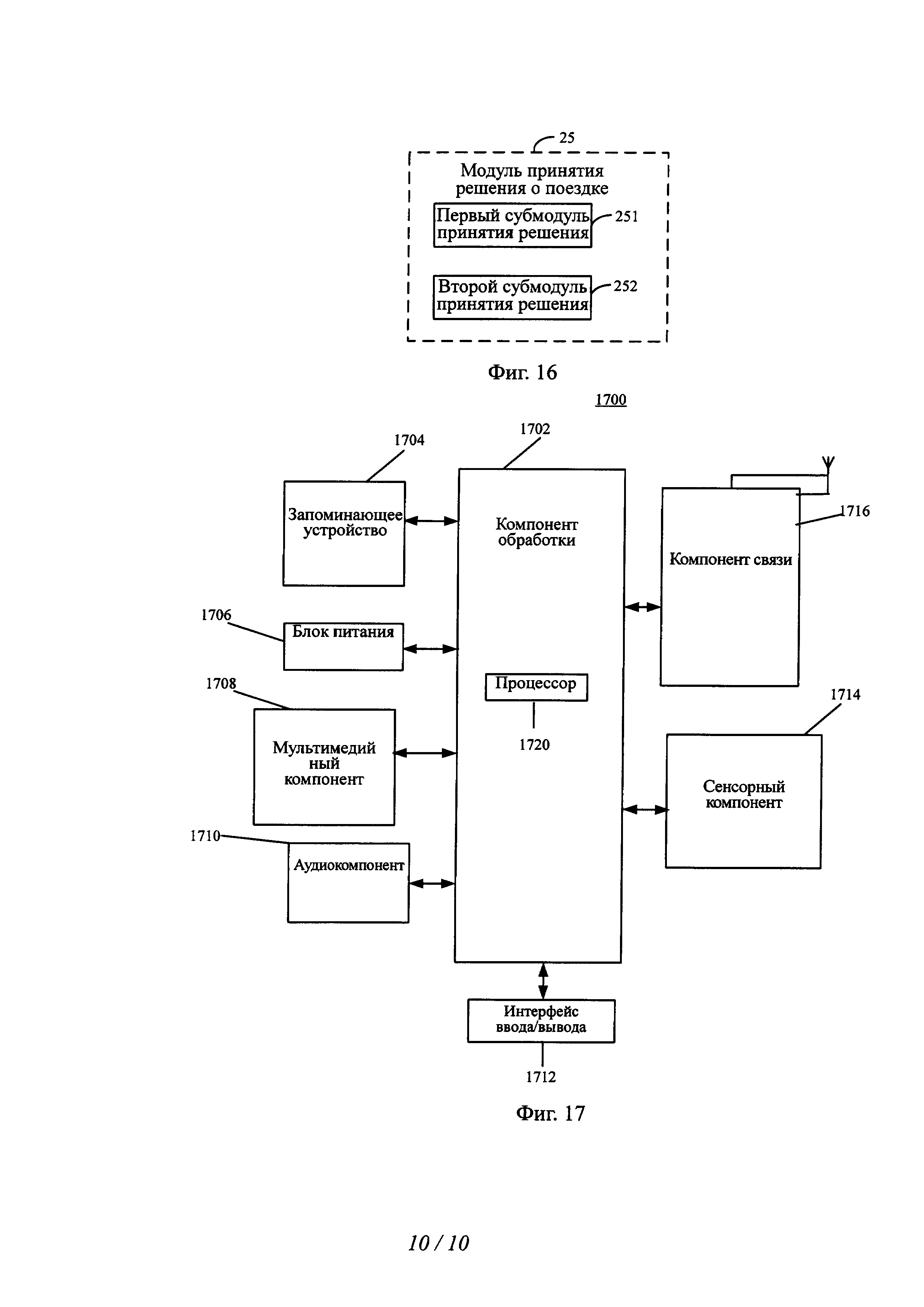
[0098] Фиг. 16 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения;
[0099] Фиг. 17 представляет собой блок-схему устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[00100] Далее приведено подробное описание примеров осуществления изобретения, проиллюстрированных на чертежах. Приведенное ниже описание относится к чертежам, на которых одни и те же номера на разных чертежах представляют одни и те же или аналогичные элементы, если на чертежах не указано иное. Варианты осуществления, представленные в последующем описании примеров осуществления, не представляют всех вариантов осуществления, соответствующих данному изобретению. Они являются только примерами устройств и способов, соответствующих аспектам изобретения, как изложено в прилагаемых пунктах формулы изобретения.
[00101] Термины, используемые в настоящем документе, предназначены лишь для описания отдельного варианта осуществления, а не для ограничения данного изобретения. При использовании в настоящем изобретении и прилагаемых пунктах формулы изобретения предполагается, что формы, используемые в единственном числе, такие как «некоторый», «упомянутый», «этот», включают в себя также множественное число, если контекст явно не требует иного. Необходимо также понимать, что термин «и/или», используемый в настоящем документе, означает любой отдельный элемент или любую возможную комбинацию одного или нескольких соответствующих перечисленных элементов.
[00102] Следует понимать, что, несмотря на то что элемент может описываться с терминами «первый», «второй», «третий» и т.д., данный элемент не ограничивается указанными терминами. Эти термины используются исключительно для проведения различия между элементами одного вида. Например, без изменения объема данного изобретения, на первый элемент можно также ссылаться как на второй элемент. Аналогично, на второй элемент можно также ссылаться как на первый элемент. В зависимости от контекста, термин «если», используемый в настоящем патенте, может интерпретироваться как «когда», «где» или «в ответ на определение того, что…».
[00103] Для простоты понимания необходимо, прежде всего, отметить, что в вариантах осуществления данного изобретения может предоставляться приложение АРР для навигации внутри помещений, выполняемое на терминале пользователя. Пользователь может установить АРР на свой мобильный терминал. Соответственно, сервер приложений может предоставить данные карты помещения и может разрешить взаимодействие с приложением АРР для навигации внутри помещений на терминале пользователя таким образом, чтобы осуществить функцию управления траекторией движения пользователя к лифту/эскалатору с помощью терминала пользователя.
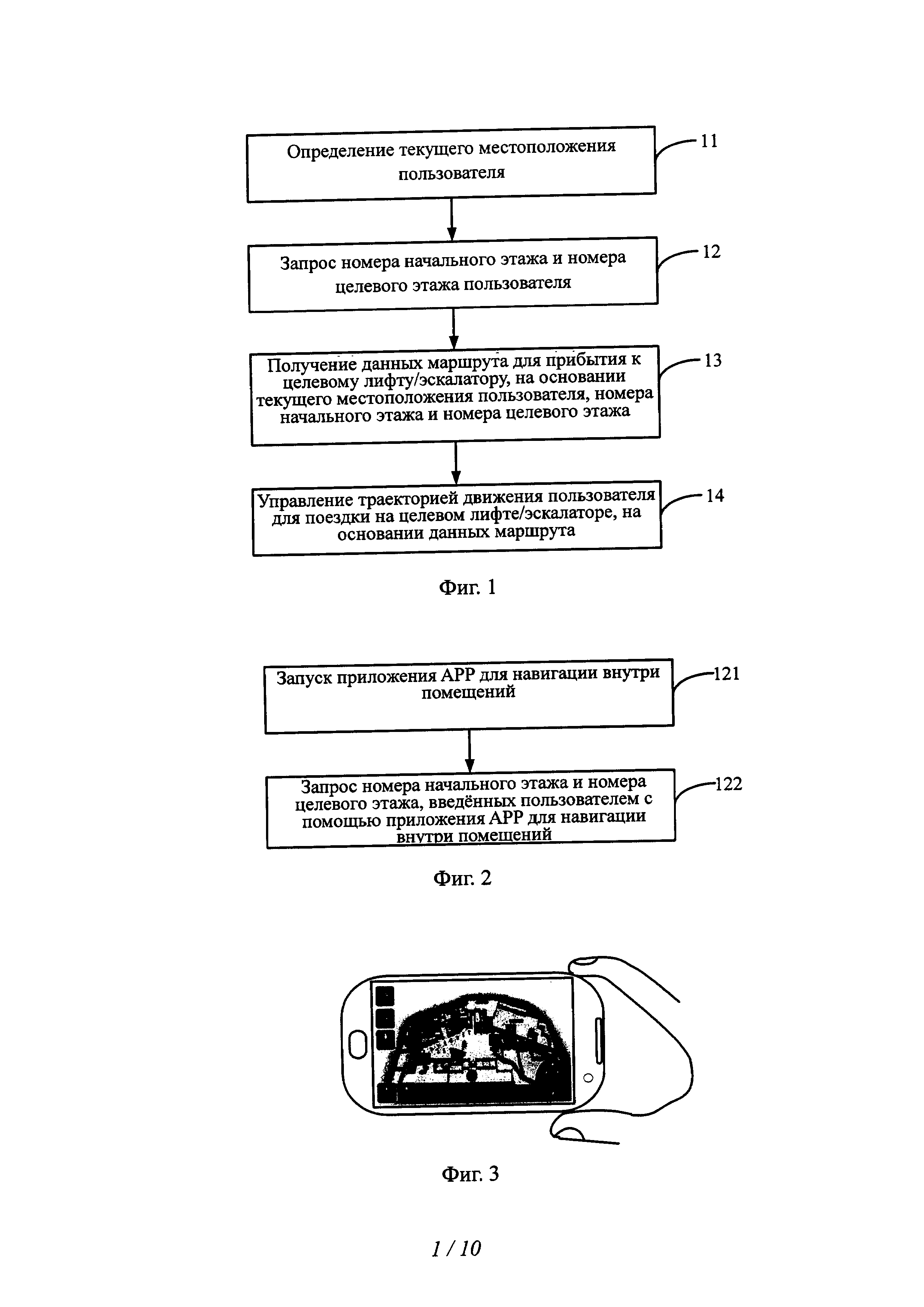
[00104] Фиг. 1 представляет собой блок-схему, иллюстрирующую способ программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения, включающий следующие шаги.
[00105] При выполнении шага 11 определяется текущее местоположение пользователя.
[00106] В данном изобретении текущее местоположение пользователя может быть представлено долготой и широтой, а также высотой, или может быть представлено направлением и расстоянием относительно какого-то объекта.
[00107] Когда пользователь, несущий терминал, находится в большом здании, таком как большой торговый центр, терминал пользователя может определить текущее местоположение пользователя с помощью следующих способов.
[00108] Первый способ: определение текущего местоположения пользователя с помощью системы глобального позиционирования.
[00109] Система глобального позиционирования (GPS) - это навигационная система, базирующаяся на спутнике. Спутники GPS вращаются вокруг Земли два раза в сутки, двигаясь по очень точной орбите и посылая данные о себе на Землю. Когда приемник GPS получает эти данные, он может рассчитать точное текущее положение пользователя с помощью методов триангуляции.
[00110] Второй способ: определение текущего местоположения пользователя с помощью технологии мобильного позиционирования.
[00111] Например, технология мобильного позиционирования по координатам соты (СОО) может использоваться для определения текущего местоположения пользователя, несущего терминал. Здесь технология мобильного позиционирования СОО является технологией мобильного позиционирования для поиска местонахождения пользователя мобильного терминала в системе сотовой связи. Технология представляет местонахождение с помощью области, в которой находится мобильный терминал. Регистрация базовой станции, где находится мобильный терминал, может идентифицировать соответствующую область, а текущее местоположение терминала пользователя может быть определено путем поиска местонахождения базовой станции.
[00112] Третий способ: определение текущего местонахождения пользователя с помощью технологии позиционирования внутри помещений.
[00113] Технология позиционирования внутри помещений включает в себя: позиционирование Bluetooth, позиционирование Zigbee, позиционирование Wi-Fi и т.п. Здесь позиционирование Wi-Fi включает в себя, в частности: определение текущего местоположения терминала через «отпечаток» Wi-Fi мобильного устройства. Конкретный процесс может быть следующим: сначала регистрация данных каждой находящейся внутри помещений точки доступа (АР); затем получение показателя уровня принимаемого сигнала (RSSI) каждой АР в каждой точке приема внутри помещений в качестве «отпечатка» точки приема, называемого «отпечатком» Wi-Fi; затем полученные «отпечатки» Wi-Fi и местоположения сохраняются на сервере; наконец, если терминалу пользователя требуется позиционирование, загрузка «отпечатка» Wi-Fi с терминала на сервер, и решение сервера о текущем местоположении терминала пользователя в соответствии с ранее полученными данными.
[00114] При выполнении шага 12 запрашивают номер начального этажа и номер целевого этажа пользователя.
[00115] В данном изобретении номер начального этажа пользователя можно получить с помощью любого из следующих способов.
[00116] Первый способ: основывается на текущем местоположении пользователя, полученном при выполнении шага 11, в соответствии с цифровой географической моделью большого здания, определяя этаж, на котором пользователь находится в настоящий момент, в качестве номера начального этажа.
[00117] Второй способ: запуск приложения АРР для навигации внутри помещений и получение пользовательского ввода в пользовательском интерфейсе АРР в качестве номера начального этажа.
[00118] Целевой этаж можно получить на основе ввода целевого этажа пользователем в пользовательском интерфейсе АРР.
[00119] Фиг. 2 представляет собой блок-схему, иллюстрирующую другой способ программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. С учетом варианта осуществления, показанного на Фиг. 1, шаг 12 может включать в себя следующие шаги.
[00120] При выполнении шага 121 запускается приложение АРР для навигации внутри помещений.
[00121] Вообще, в данном изобретении приложение АРР для навигации внутри помещений может запускаться в ответ на ввод управляющих команд пользователем для запуска приложения АРР для навигации внутри помещений. Вышеупомянутой управляющей командой пользователя могут быть идентификационные данные пользователя для верификации ввода пользователя или действие распознавания, и т.п. Например, в интерфейсе приложения АРР для навигации внутри помещений на терминале пользователя, когда пользователь вводит свои идентификационные данные, идентификационными данными пользователя может быть пользовательская учетная запись. После того, как фоновое приложение выполнит верификацию личности по вышеупомянутым идентификационным данным пользователя, запускается приложение АРР для навигации внутри помещений. Фиг. 3 представляет собой схему, иллюстрирующую сценарий применения программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. Например, в ответ на действие, выполненное пользователем на иконке приложения АРР для навигации внутри помещений, такое как двойные щелчки на иконке приложения АРР для навигации внутри помещений, или тому подобное, если за счет сравнения выполненного действия и предварительно установленного действия, действие, выполненное пользователем, признается соответствующим предварительно установленному действию, приложение АРР для навигации внутри помещений включается и предоставляет соответствующий пользовательский интерфейс, как показано на Фиг. 3.
[00122] В качестве альтернативы, приложение АРР для навигации внутри помещений может запускаться, если текущее положение пользователя находится внутри предварительно установленного диапазона расстояний.
[00123] Например, после получения текущего местоположения пользователя принимается решение, находится ли пользователь внутри предварительно установленного торгового центра. Когда принимается решение, что пользователь вошел в вышеупомянутый предварительно установленный торговый центр, запускается приложение навигации внутри помещений, как показано на Фиг. 3.
[00124] При выполнении шага 122 получают номер начального этажа и номер целевого этажа, введенные пользователем с помощью приложения АРР для навигации внутри помещений.
[00125] Приложение АРР для навигации внутри помещений может предоставлять различные функции, такие как поиск нужного отдела, поиск мест общего пользования, таких как туалет, лифт/эскалатор. Приложение АРР для навигации внутри помещений может также предоставлять функцию отображения информации о товарах на полке. В данном изобретении в основном используется функция приложения АРР для навигации внутри помещений для поиска лифта/эскалатора. В соответствии с вышеупомянутой функцией поиска лифта/эскалатора, приложение АРР для навигации внутри помещений обеспечивает соответствующий пользовательский интерфейс, такой как пользовательский интерфейс, озаглавленный «навигация к лифту/эскалатору». Пользовательский интерфейс обеспечивает ввод команды пользователем, посредством чего пользователь может вводить номер начального этажа и номер целевого этажа пользователя.
[00126] Конкретное осуществление взаимодействия между пользователем и программируемым устройством относится к осуществлению ввода команды пользователем. Осуществление ввода команды пользователем может быть в разных формах, и соответственно, осуществление взаимодействия между пользователем и программируемым устройством может также быть в разных формах.
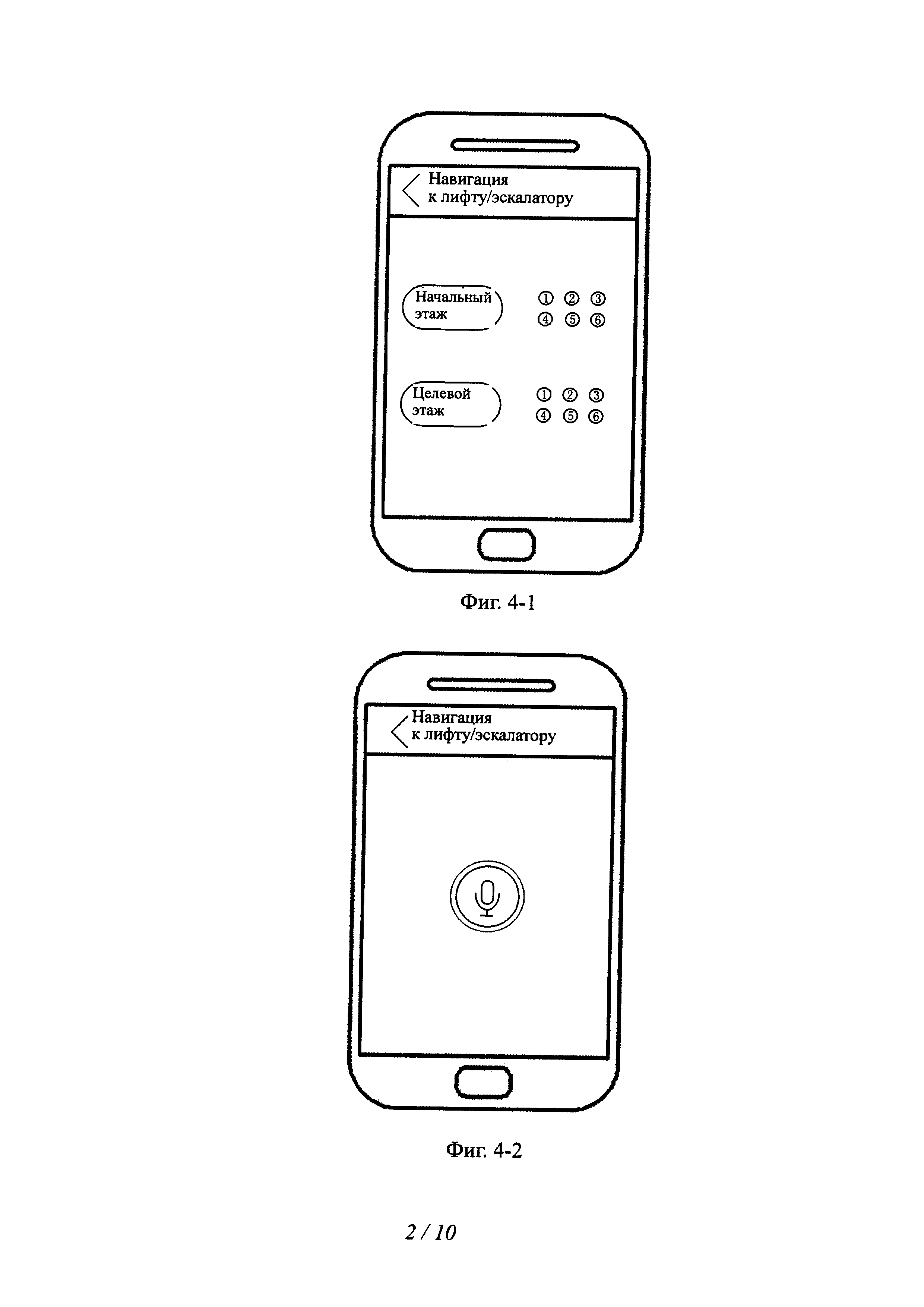
[00127] Например, как показано на Фиг. 4-1, которая представляет собой схематическое изображение, иллюстрирующее сценарий применения программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения, ввод команды пользователем обеспечивается в виде кнопок управления, представленных в вышеупомянутом пользовательском интерфейсе навигации к лифту/эскалатору. В настоящее время большинство мобильных телефонов оснащаются сенсорными экранами. Таким образом, ввод команды пользователем организован через кнопки управления, представленные в вышеупомянутом пользовательском интерфейсе, и пользователь может непосредственно нажать соответствующую кнопку на сенсорном экране для установки номера начального этажа и номера целевого этажа.
[00128] В качестве альтернативы, как показано на Фиг. 4-2, которая представляет собой схематическое изображение, иллюстрирующее сценарий применения программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения, ввод команды пользователем организован как голосового ввода в вышеупомянутом пользовательском интерфейсе навигации к лифту/эскалатору. В конкретном варианте осуществления может быть предусмотрена кнопка голосового ввода в пользовательском интерфейсе навигации к лифту/эскалатору для ввода команды пользователем. После нажатия пользователем кнопки голосового ввода может запускаться устройство голосового ввода, такое как микрофон на терминале пользователя, для получения голосовой информации, вводимой пользователем. Например, пользователь может сказать: «С первого этажа на шестой этаж» в микрофон терминала пользователя. Соответственно, приложение АРР для навигации внутри помещений может распознать сигнал голосового ввода и установить первый этаж в качестве начального этажа и шестой целевой этаж в качестве целевого этажа.
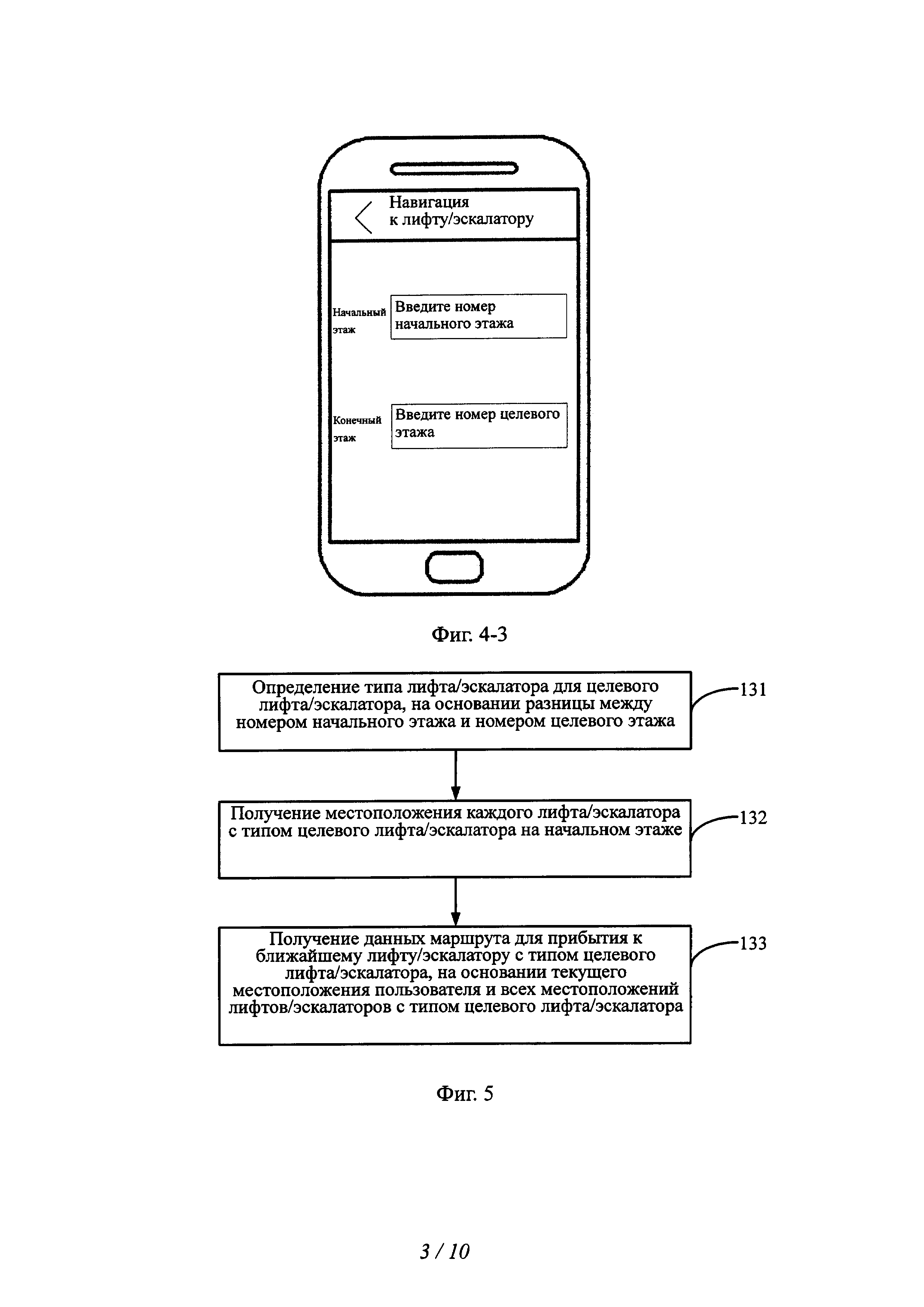
[00129] В качестве альтернативы, как показано на Фиг. 4-3, которая представляет собой схематическое изображение, иллюстрирующее другой сценарий применения программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения, ввод команды пользователем организован через подсказку ввести текст на вышеупомянутом пользовательском интерфейсе навигации к лифту/эскалатору. В конкретном варианте осуществления могут быть предусмотрены текстовое окно для ввода номера начального этажа и текстовое окно для ввода номера целевого этажа на пользовательском интерфейсе навигации к лифту/эскалатору в качестве ввода команды пользователем. Пользователь может с помощью экранной клавиатуры ввести номер начального этажа, такой как 1, в текстовом окне для ввода номера начального этажа, и ввести номер целевого этажа, такой как 6, в текстовом окне для ввода номера целевого этажа.
[00130] При выполнении шага 13 получают данные маршрута для прибытия к целевому лифту/эскалатору, на основании текущего местоположения пользователя, номера начального этажа и номера целевого этажа.
[00131] Фиг. 5 представляет собой блок-схему, иллюстрирующую другой способ программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. С учетом варианта осуществления, показанного на Фиг. 1, шаг 13 может включать в себя следующие шаги.
[00132] При выполнении шага 131, определяется тип целевого лифта/эскалатора для целевого лифта/эскалатора на основании разницы между номером начального этажа и номером целевого этажа.
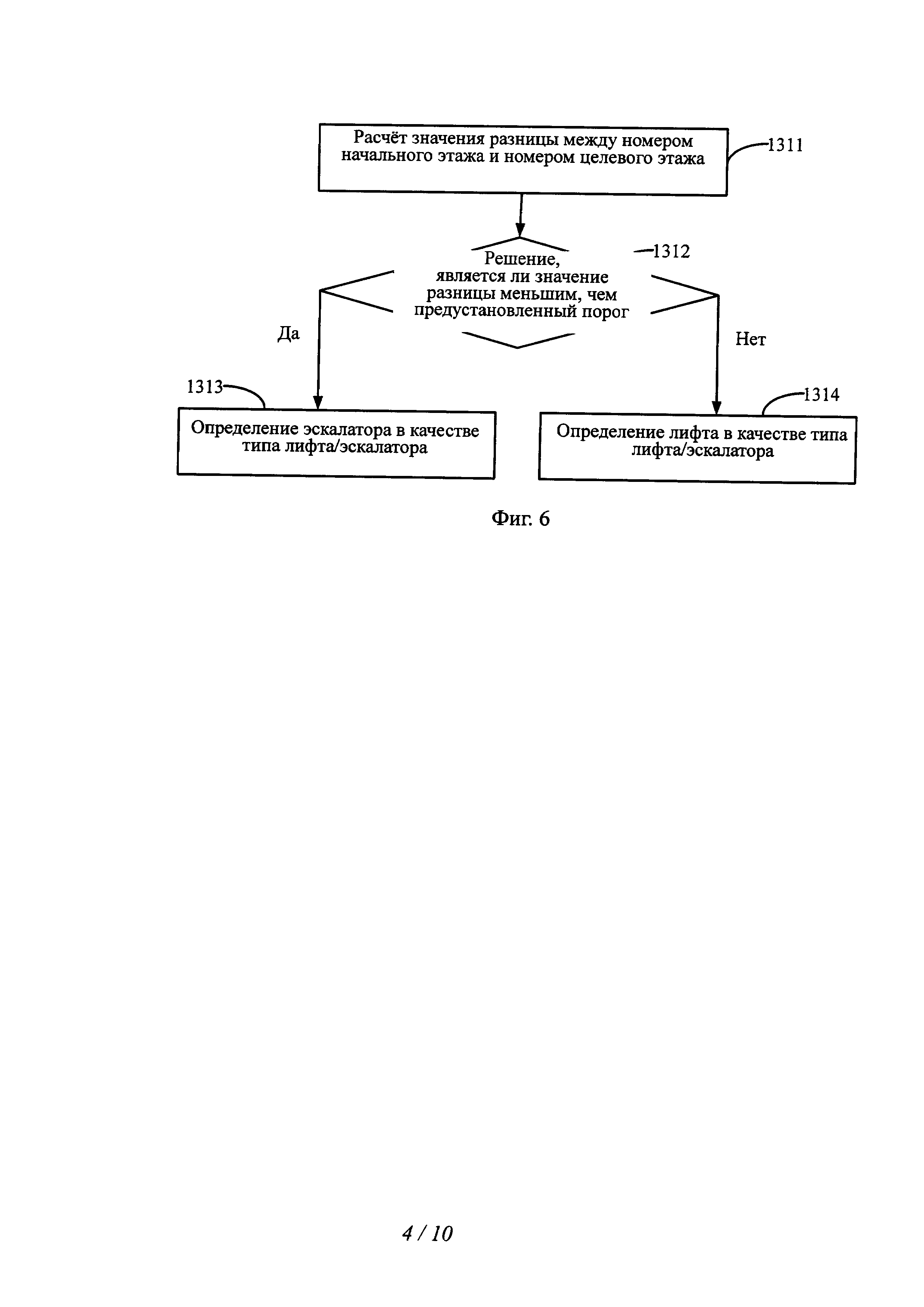
[00133] В одном из вариантов осуществления настоящего изобретения, как показано на Фиг. 6, которая представляет собой блок-схему, иллюстрирующую другой способ программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения, основанном на варианте осуществления, как показано на Фиг. 5, шаг 131 может включать в себя следующие шаги.
[00134] При выполнении шага 1311 рассчитывается значение разницы между номером начального этажа и номером целевого этажа.
[00135] При выполнении шага 1312 принимается решение, является ли значение разницы меньше, чем предварительно установленный порог; если значение разности меньше, чем предварительно установленный порог, осуществляется переход к шагу 1313, а если значение разности больше или равно предварительно установленному порогу, осуществляется переход к шагу 1314.
[00136] При выполнении шага 1313 эскалатор принимается в качестве типа целевого лифта/эскалатора.
[00137] При выполнении шага 1314 лифт принимается в качестве типа целевого лифта/эскалатора.
[00138] Предполагается, например, в базовой прикладной программе приложения АРР для навигации внутри помещений, что предварительно установленный порог равен 3. Затем предварительно установленное правило может быть следующим: если значение разницы меньше чем 3, пользователю рекомендуется эскалатор; а если значение разницы больше чем 3, пользователю рекомендуется лифт.
[00139] Например, терминал пользователя получает 6 в качестве номера начального этажа, 4 в качестве номера целевого этажа. Таким образом, значение разницы составляет 2. В соответствии с вышеупомянутым предварительно установленным правилом, соответствующим вышеупомянутому предварительно установленному порогу, поскольку 2 меньше 3, приложение АРР для навигации внутри помещений порекомендует пользователю для прибытия на целевой этаж воспользоваться эскалатором.
[00140] В другом примере терминал пользователя получил 1 в качестве номера начального этажа, 6 в качестве номера целевого этажа. Таким образом, значение разницы составляет 5. В соответствии с вышеупомянутым предварительно установленным правилом, соответствующим вышеупомянутому предварительно установленному порогу, поскольку 5 больше 3, приложение АРР для навигации внутри помещений порекомендует пользователю для прибытия на целевой этаж воспользоваться лифтом. Вышеупомянутый лифт может включать в себя пассажирский лифт или грузовой лифт.
[00141] При выполнении шага 132 получают местоположение каждого лифта/эскалатора с типом целевого лифта/эскалатора.
[00142] В настоящем изобретении, как показано на Фиг. 7, которая представляет собой схематическое изображение, иллюстрирующее сценарий применения программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения, в соответствии с вышеупомянутым примером, местоположения всех лифтов на этаже, где в настоящий момент находится пользователь, получают из базы данных ГИС торгового центра. Предполагается, что имеется 3 лифта на первом этаже с идентификацией А, В и С, соответствующей первому местонахождению, второму местонахождению и третьему местонахождению.
[00143] При выполнении шага 133 данные маршрута для прибытия к ближайшему лифту/эскалатору с типом целевого лифта/эскалатора получают, на основании текущего местоположения пользователя и всех местоположений лифтов/эскалаторов с типом целевого лифта/эскалатора.
[00144] В соответствии с вышеуказанным примером, предполагается, что текущее местоположение пользователя - это на входе О в отдел. Тогда, на основании текущего местоположения пользователя и вышеуказанных первом местоположении, втором местоположении и третьем местоположении, рассчитывается длина маршрутов ОА, ОВ и ОС, соответственно, и маршрут с самой меньшей длиной маршрута принимается в качестве данных маршрута. Например, после расчета и сравнения может получиться, что лифт В является ближайшим к пользователю, и данными маршрута будет маршрут для прибытия к лифту В.
[00145] Подобным образом, если вышеуказанный тип целевого лифта/эскалатора является эскалатором, получают местоположения всех эскалаторов на текущем этаже. Рассчитывается ближайший к пользователю эскалатор, и генерируются данные маршрута для прибытия к этому ближайшему эскалатору. Для расчета ближайшего к пользователю эскалатора рассматриваются не только расстояния до входов на эскалаторы от пользователя на этом же этаже, но также при выборе эскалатора может рассматриваться, какой эскалатор более удобный для пользователя для поездки. Например, номер начального этажа для пользователя равен 6, а номер целевого этажа равен 4. На основании информации ГИС торгового центра, получают местоположения всех эскалаторов на шестом этаже. Кроме того, принимается решение, имеется ли эскалатор с шестого этажа прямо на четвертый этаж. Если такой эскалатор имеется, в качестве целевого эскалатора в первую очередь выбирается эскалатор, ведущий прямо на четвертый этаж. Если нет эскалатора с шестого этажа прямо на четвертый этаж, в качестве целевого эскалатора выбирается ближайший эскалатор на основании расстояний от эскалаторов до пользователя.
[00146] При выполнении шага 14 пользователь направляется для поездки на целевом лифте/эскалаторе, на основании данных маршрута.
[00147] В данном изобретении ГИС может предоставлять трехмерную модель визуализации большого здания. Например, в большом торговом центре вышеупомянутые данные маршрута могут наглядно отображаться в трехмерной модели визуализации большого торгового центра, и они могут включать в себя длину маршрута, направления, отделы, мимо которых они проходят, и так далее. Подобно навигации для автомобилей в смежной области техники, приложения АРР для навигации внутри помещений не только может наглядно отображать текущее местоположение пользователя в режиме реального времени, но также может предложить пользователю прибыть к целевому лифту по маршруту в режиме реального времени. Например, при пересечении нескольких проходов будет отображаться маршрут и, кроме того, будет звучать голос: «Поверните налево, идите прямо 30 метров, поверните направо и подойдите к лифту В».
[00148] Соответственно, в способе программируемого управления траекторией движения пользователя к лифту/эскалатору, раскрываемом данным изобретением, использующем базу данных ГИС большого здания, данные лифта/эскалатора могут автоматически рекомендоваться пользователю, и могут генерироваться данные маршрута для прибытия к целевому лифту/эскалатору. На основании данных маршрута пользователь направляется к целевому лифту/эскалатору. Тем самым, изобретение может быстро и через программу предоставить навигационную услугу для пользователя, а также оно может избавить пользователя от проблемы поиска лифта/эскалатора в большом здании, экономя время и повышая комфорт пользователя.
[00149] В данном изобретении, когда типом целевого лифта/эскалатора является эскалатор, может иметь место ситуация, где направление движения эскалатора противоположно направлению движения, записанному в базе данных ГИС, или когда два соседних эскалатора имеют одно и то же направления движения. Такие ситуации будут вызывать ошибки в данных маршрута, предоставляемых терминалом пользователю.
[00150] Для вышеупомянутой ситуации, как показано на Фиг. 8, которая представляет собой блок-схему, иллюстрирующую другой способ программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения, с учетом варианта осуществления, показанном на Фиг. 1, способ может также включать в себя следующие шаги.
[00151] При выполнении шага 15, когда типом целевого лифта/эскалатора является эскалатор, принимается решение, поехал ли пользователь на целевом эскалаторе.
[00152] В данном изобретении, решение о том, поехал ли пользователь на целевом эскалаторе, может приниматься любым из следующих способов.
[00153] Первый способ: принятие решение, поехал ли пользователь на целевом эскалаторе, основывается на контролируемом видеоряде.
[00154] Например, данные контролируемого видеоряда получают из сервера торгового центра, и принимается решение, поехал ли пользователь на целевом эскалаторе, как ему рекомендовалось, на основании контролируемого видеоряда целевого эскалатора, который снимается системой видеоконтроля.
[00155] Второй способ: принятие решения, поехал ли пользователь на целевом эскалаторе, путем опроса пользователя.
[00156] Например, после того, как система навигации внутри помещений обнаруживает, что пользователь прибыл к целевому эскалатору, предоставляется второй пользовательский интерфейс для опроса пользователя о том, корректно ли направление движения эскалатора, с помощью диалогового окна, кнопки выбора, голосовой подсказки или им подобного.
[00157] При выполнении шага 16, если пользователь не поехал на целевом эскалаторе, определяется второй эскалатор.
[00158] В соответствии с вышеупомянутым первым способом, если обнаружено по контролируемому видеоряду, что пользователь не поехал на целевом эскалаторе, например, по контролируемому видеоряду видно, что пользователь прибыл к целевому эскалатору и неожиданно изменил свой путь, это рассматривается по умолчанию как то, что определенное направление движения целевого эскалатора в этот раз оказалось неправильным, и новый целевой эскалатор выбирается для пользователя в качестве второго эскалатора.
[00159] В соответствии с вышеупомянутым вторым способом, информация обратной связи на вышеупомянутый опрос получается от пользователя. Например, если пользователь ожидает эскалатор со второго этажа на третий этаж, однако обнаруживает, что текущий рекомендованный целевой эскалатор движется с третьего этажа на второй этаж, пользователь может ввести отрицательный ответ с помощью ввода команды пользователем на втором пользовательском интерфейсе. Если определено, что направление движения целевого эскалатора противоположно направлению движения, ожидаемому пользователем, новый целевой эскалатор выбирается для пользователя в качестве второго эскалатора.
[00160] При выполнении шага 17 получают данные второго маршрута для прибытия ко второму эскалатору.
[00161] Данные маршрута для прибытия ко второму эскалатору могут определяться, на основании текущего местоположения пользователя и местоположения второго эскалатора.
[00162] При выполнении шага 18 пользователя направляют ко второму эскалатору, на основании данных второго маршрута.
[00163] В данном изобретении, когда целевым лифтом/эскалатором является эскалатор, дополнительный шаг осуществляется после шага управления траекторией движения пользователя к целевому эскалатору: принятие решения, поехал ли пользователь на целевом эскалаторе. Если обнаружено, что пользователь не поехал на целевом эскалаторе, как ему рекомендовалось, можно определить, что направление движения текущего целевого эскалатора неверно. В этом случае определяется второй эскалатор. Соответствующие данные маршрута генерируются для управления траекторией движения пользователя для удобной поездки на втором целевом эскалаторе.
[00164] С целью упрощения описания вышеописанные варианты осуществления способа описываются как комбинация шагов. Однако специалисту в данной области техники будет понятно, что данное изобретение не ограничивается описанным порядком действий. Таким образом, некоторые шаги могут выполняться в другом порядке или выполняться одновременно согласно с данным изобретением.
[00165] Кроме того, специалисту в данной области техники будет очевидно, что варианты осуществления, представленные в описании, являются дополнительными вариантами осуществления, шаги и модули, участвующие в них, не являются обязательными для данного изобретения.
[00166] В соответствии с вышеупомянутыми вариантами осуществления относительно способа осуществления приложения, данная заявка также раскрывает варианты осуществления, относящиеся к устройству для осуществления изобретения и соответствующему терминалу.
[00167] В соответствии с вышеупомянутыми вариантами осуществления относительно способа программируемого управления траекторией движения пользователя к лифту/эскалатору, данное изобретение также предоставляет варианты осуществления, относящиеся к устройству для программируемого управления траекторией движения пользователя к лифту/эскалатору. Эти варианты осуществления отдельно описаны со ссылкой на сопровождающие чертежи.
[00168] Фиг. 9 представляет собой блок-схему устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. Как показано на Фиг. 9, устройство включает в себя:
[00169] модуль 21 определения местоположения, сконфигурированный для определения текущего местоположения пользователя;
[00170] модуль 22 определения этажа, сконфигурированный для запроса номера начального этажа и номера целевого этажа пользователя;
[00171] первый модуль 23 определения маршрута, сконфигурированный для получения данных маршрута для прибытия к целевому лифту/эскалатору, на основании текущего положения пользователя, номера начального этажа и номера целевого этажа; и
[00172] первый модуль 24 управления траекторией движения, сконфигурированный для управления траекторией движения пользователя к целевому лифту/эскалатору, на основании данных маршрута.
[00173] Фиг. 10 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. Как показано на Фиг. 10, с учетом варианта осуществления, показанного на Фиг. 9, модуль 21 определения местоположения может включать в себя:
[00174] первый субмодуль 211 определения, сконфигурированный для определения текущего местоположения пользователя с помощью системы глобального позиционирования;
[00175] второй субмодуль 212 определения, сконфигурированный для определения текущего местоположения пользователя с помощью технологии мобильного позиционирования; и
[00176] третий субмодуль 213 определения, сконфигурированный для определения текущего местоположения пользователя с помощью технологии позиционирования внутри помещений.
[00177] Фиг. 11 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. Как показано на Фиг. 11, с учетом варианта осуществления, показанного на Фиг. 9, модуль 22 определения этажа может включать в себя:
[00178] субмодуль 221 запуска, сконфигурированный для запуска приложения АРР для навигации внутри помещений; и
[00179] субмодуль 222 приема, сконфигурированный для получения номера начального этажа и номера целевого этажа, введенного пользователем с помощью приложения АРР для навигации внутри помещений.
[00180] Фиг. 12 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. Как показано на Фиг. 12, с учетом варианта осуществления, показанного на Фиг. 11, субмодуль 221 запуска может включать в себя:
[00181] первый блок 2211 запуска, сконфигурированный для запуска приложения АРР для навигации внутри помещений в ответ на команды управления, вводимые пользователем для запуска приложения АРР для навигации внутри помещений; или
[00182] второй блок 2212 запуска, сконфигурированный для запуска приложения АРР для навигации внутри помещений по отслеживанию того, что текущее местоположение пользователя находится внутри предварительно установленного диапазона расстояний.
[00183] Фиг. 13 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. Как показано на Фиг. 13, с учетом варианта осуществления, показанного на Фиг. 9, первый модуль 23 определения маршрута может включать в себя:
[00184] субмодуль 231 определения типа лифта/эскалатора, сконфигурированный для определения типа целевого лифта/эскалатора для целевого лифта/эскалатора на основании разницы номером начального этажа и номером целевого этажа;
[00185] субмодуль 232 получения местоположения, сконфигурированный для получения местоположения каждого лифта/эскалатора с типом целевого лифта/эскалатора на начальном этаже; и
[00186] субмодуль 233 планирования маршрута, сконфигурированный для получения данных маршрута для прибытия к ближайшему лифту/эскалатору с целевым типом лифта/эскалатора на основании текущего местоположения пользователя и всех местоположений лифтов/эскалаторов с типом целевого лифта/эскалатора.
[00187] Фиг. 14 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. Как показано на Фиг. 14, с учетом варианта осуществления, показанного на Фиг. 13, субмодуль 231 определения типа лифта/эскалатора может включать в себя:
[00188] блок 2311 расчета, сконфигурированный для расчета значения разницы между номером начального этажа и номером целевого этажа;
[00189] блок 2312 принятия решения, сконфигурированный для принятия решения, является ли значение разницы меньшим, чем предварительно установленный порог;
[00190] первый блок 2313 определения типа, сконфигурированный для определения эскалатора в качестве типа целевого лифта/эскалатора, если значение разницы меньше, чем предварительно установленный порог; и
[00191] второй блок 2314 определения типа, сконфигурированный для определения лифта в качестве типа целевого лифта/эскалатора, если значение разницы больше предварительно установленного порога или равно ему.
[00192] Фиг. 15 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. Как показано на Фиг. 15, с учетом варианта осуществления, показанного на Фиг. 9, устройство может включать в себя:
[00193] модуль 25 принятия решения о поездке, сконфигурированный для принятия решения, поехал ли пользователь на целевом эскалаторе, если типом целевого лифта/эскалатора является эскалатор;
[00194] модуль 26 определения эскалатора, сконфигурированный для определения второго эскалатора, если пользователь не поехал на целевом эскалаторе;
[00195] второй модуль 27 определения маршрута, сконфигурированный для получения данных второго маршрута для прибытия ко второму эскалатору; и
[00196] второй модуль 28 управления траекторией движения, сконфигурированный для управления траекторией движения пользователя ко второму эскалатору, на основании данных второго маршрута.
[00197] Фиг. 16 представляет собой блок-схему другого устройства для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. Как показано на Фиг. 16, с учетом варианта осуществления, показанного на Фиг. 15, модуль 25 принятия решения о поездке может включать в себя:
[00198] первый субмодуль 251 принятия решения, сконфигурированный для принятия решения, поехал ли пользователь на целевом эскалаторе, на основании контролируемого видеоряда; или
[00199] второй субмодуль 252 принятия решения, сконфигурированный для решения, поехал ли пользователь на целевом эскалаторе, путем опроса пользователя.
[00200] Осуществление функций и операций модулей вышеупомянутых устройств может, в частности, относиться к осуществлению соответствующих шагов вышеупомянутых методов, что не будет далее дублироваться в настоящем документе.
[00201] Поскольку в вариантах осуществления, касающихся устройств, эти действия и функции соответствуют вариантам осуществления, касающихся способов, можно ссылаться на описания вариантов осуществления, касающихся способов. Варианты осуществления, касающиеся устройств, описанных выше, являются исключительно иллюстративными. Блоки, описанные как отдельные компоненты, могут быть разделены или не разделены физически, и компоненты, проиллюстрированные как блоки, могут быть или не быть физическими блоками и могут находиться в одном и том же месте или могут быть распределены по нескольким блокам в сети. Для достижения цели данного изобретения могут, по желанию, выбираться все модули или их часть. Специалист в данной области техники может понять и реализовать на практике примеры осуществления данного изобретения, не затрачивая творческого труда.
[00202] Кроме того, данное изобретение также раскрывает устройство для программируемого управления траекторией движения пользователя к лифту/эскалатору, включающее в себя:
[00203] процессор; и
[00204] запоминающее устройство для хранения команд, выполняемых процессором;
[00205] при этом процессор сконфигурирован для выполнения:
[00206] определения текущего местоположения пользователя;
[00207] запроса номера начального этажа и номера целевого этажа пользователя;
[00208] получения данных маршрута для прибытия к целевому лифту/эскалатору на основании текущего местоположения пользователя, номера этажа и номера целевого этажа; и
[00209] управления траекторией движения пользователя к целевому лифту/эскалатору на основании данных маршрута.
[00210] Фиг. 17 представляет собой блок-схему устройства 1700 для программируемого управления траекторией движения пользователя к лифту/эскалатору в соответствии с примером осуществления данного изобретения. Например, устройство 1700 может быть терминалом пользователя, таким как смартфон, карманный персональный компьютер (РБА), интеллектуальный браслет и другими интеллектуальными терминалами.
[00211] Как показано на Фиг. 17, устройство 1700 может включать в себя один или несколько из следующих компонентов: компонент 1702 обработки, запоминающее устройство 1704, блок 1706 питания, мультимедийный компонент 1708, аудиокомпонент 1710, интерфейс 1712 ввода/вывода (1/0), сенсорный компонент 1714 и компонент 1716 связи.
[00212] Компонент 1702 обработки обычно управляет общими операциями устройства 1700, такими как операции, связанные с дисплеем, телефонные звонки, передача данных, операции съемки и операции записи. Компонент 1702 обработки может включать в себя один или несколько процессоров 1720 для исполнения команд на выполнение всех шагов описанных выше способов или их части. Более того, компонент 1702 обработки может включать в себя один или более модулей, облегчающих взаимодействие между компонентом 1702 обработки и другими компонентами. Компонент 1702 обработки может, например, включать в себя мультимедийный модуль для облегчения взаимодействия между мультимедийным компонентом 1708 и компонентом 1702 обработки.
[00213] Запоминающее устройство 1704 сконфигурировано для хранения различных типов данных для поддержания функционирования устройства 1700. Примеры таких данных включают в себя инструкции по любым приложениям или способам, задействованным в устройстве 1700, контактные данные, данные из телефонного справочника, сообщения, рисунки, видео и т.д. Запоминающее устройство 1704 может быть реализовано с использованием энергозависимых или энергонезависимых запоминающих устройств или их комбинации, таких как статическое оперативное запоминающее устройство (СОЗУ), электрически программируемое постоянное запоминающее устройство (ЭСППЗУ), стираемое программируемое постоянное запоминающее устройство (СППЗУ), программируемое постоянное запоминающее устройство (ППЗУ), постоянное запоминающее устройство (ПЗУ), магнитное запоминающее устройство, флэш-карта, магнитный или оптический диск.
[00214] Блок 1706 питания обеспечивает электрическое питание различных компонентов устройства 1700. Блок 1706 питания может включать в себя систему управления электрическим питанием, один или несколько источников питания и любые другие компоненты, связанные с выработкой и распределением электроэнергии, а также управлением электрическим питанием в устройстве 1700.
[00215] Мультимедийный компонент 1708 включает в себя экран, обеспечивающий выходной интерфейс между устройством 1700 и пользователем. В некоторых вариантах осуществления изобретения экран может включать в себя жидкокристаллический дисплей (LCD) и сенсорную панель (ТР). Если экран включает в себя сенсорную панель, он может быть реализован как сенсорный экран для принятия входных сигналов от пользователя. Сенсорная панель включает в себя один или более тактильных датчиков для восприятия касаний, скольжения и жестов на сенсорной панели. Тактильные датчики могут воспринимать не только границу касания или скольжения, но также воспринимать период времени и нажим, связанный с действием касания или скольжения. В некоторых вариантах осуществления мультимедийный компонент 1708 включает в себя переднюю камеру и/или заднюю камеру. Передняя и задняя камеры могут принимать внешнюю мультимедийную информацию, когда устройство 1700 находится в рабочем режиме, таком, как режим фотографии или видеосъемки. Каждая из камер - передняя и задняя - может представлять собой фиксированную систему оптических линз или иметь функцию фокусировки и оптического масштабирования.
[00216] Аудиокомпонент 1710 способен выводить и/или вводить аудиосигналы. Аудиокомпонент 1710 может, например, включать в себя микрофон («MIC»), сконфигурированный для приема внешнего аудиосигнала, когда устройство 1700 находится в рабочем режиме, например, в режиме вызова, режиме записи и режиме распознавания голоса. Принятый аудиосигнал может быть далее сохранен в запоминающем устройстве 1704 или передан посредством компонента 1716 связи. В некоторых вариантах осуществления, аудиокомпонент 1710 дополнительно включает в себя динамик для вывода аудиосигналов.
[00217] Интерфейс 1712 ввода/вывода обеспечивает интерфейсную связь между компонентом 1702 обработки и периферийными интерфейсными модулями, такими, как клавиатура, мышь, кнопки и т.д. Кнопки могут включать в себя кнопку возврата в исходное положение, кнопку регулирования громкости, кнопку запуска и кнопку блокировки, но не ограничиваются ими.
[00218] Сенсорный компонент 1714 включает в себя один или несколько датчиков для обеспечения оценки состояния различных аспектов устройства 1700. Сенсорный компонент 1714 может, например, обнаруживать состояние открытия/закрытия устройства 1700, взаимное расположение компонентов, например, дисплея и клавиатуры устройства 1700, изменение положения устройства 1700 или компонента устройства 1700, наличие или отсутствие контакта пользователя с устройством 1700, ориентацию или ускорение/замедление перемещения устройства 1700 и изменение температуры устройства 1700. Сенсорный компонент 1714 может включать в себя датчик присутствия, сконфигурированный для обнаружения присутствия находящихся вблизи объектов без какого-либо физического контакта. Сенсорный компонент 1714 может также включать в себя оптический датчик, такой как датчик изображения КМОП или ПЗС, для использования с целью получения изображений. В некоторых вариантах осуществления сенсорный компонент 1714 может также включать в себя акселерометр, гиродатчик, магнитный датчик, датчик давления или датчик температуры.
[00219] Компонент 1716 связи сконфигурирован для облегчения связи - проводной или беспроводной - между устройством 1700 и другими устройствами. Устройство 1700 может иметь доступ к беспроводной сети, основанной на стандарте связи, такой как Wi-Fi, 2G или 3G, или на их сочетании. В одном из примеров осуществления изобретения компонент 1716 связи принимает транслируемый сигнал оповещения или информацию, связанную с оповещением, от внешней системы управления оповещением посредством широковещательного канала. В одном из примеров осуществления изобретения компонент 1716 связи далее включает в себя модуль беспроводной связи ближнего радиуса действия (NFC) для облегчения связи малого радиуса действия. Модуль NFC может быть выполнен, например, на основе технологии радиочастотной идентификации (РЧИД), технологии Ассоциации передачи данных в инфракрасном диапазоне (АПДИК), сверхширокополосной (UWB) технологии, технологии Bluetooth (технология ближней беспроводной связи для устройств разных типов) и других технологий.
[00220] Другие варианты осуществления данного изобретения будут очевидны для специалистов в данной области техники из рассмотрения описания и работы изобретения, описанных в настоящем документе. Предполагается, что данная заявка охватывает любые изменения, варианты использования или адаптации изобретения с соблюдением его общих принципов, включая такие отклонения от данного описания, которые возникают в рамках известной или традиционной практики в данной области. Предполагается, что описание и примеры считаются только примерами, при этом истинный объем изобретения указан в нижеследующей формуле изобретения.
[00221] Данное изобретение предпочтительно не ограничивается точной конструкцией, которая описана выше и проиллюстрирована на приложенных чертежах, и различные модификации и изменения могут быть сделаны в пределах его объема. Предполагается, что объем изобретения ограничивается только формулой изобретения.
Реферат
Изобретения относятся к средствам для программируемого управления траекторией движения пользователя к лифту/эскалатору. Предложенный способ программируемого управления траекторией движения пользователя к лифту/эскалатору включает в себя: определение текущего местоположения пользователя; запрос номера начального этажа и номера целевого этажа пользователя; получение данных маршрута для прибытия к целевому лифту/эскалатору на основании текущего местоположения пользователя, номера начального этажа и номера целевого этажа; и управление траекторией движения пользователя к целевому лифту/эскалатору на основании данных маршрута; при этом получение данных маршрута для прибытия к целевому лифту/эскалатору на основании текущего местоположения пользователя, номера начального этажа и номера целевого этажа включает в себя: определение типа целевого лифта/эскалатора для целевого лифта/эскалатора на основании разницы между номером начального этажа и номером целевого этажа; получение местоположения каждого лифта/эскалатора с типом целевого лифта/эскалатора на начальном этаже; и получение данных маршрута для прибытия к ближайшему лифту/эскалатору с типом целевого лифта/эскалатора на основании текущего местоположения пользователя и всех местоположений лифтов/эскалаторов с типом целевого лифта/эскалатора, при этом определение типа целевого лифта/эскалатора для целевого лифта/эскалатора на основании разницы между номером начального этажа и номером целевого этажа включает в себя: расчет значения разницы между номером начального этажа и номером целевого этажа; принятие решения, является ли значение разницы меньшим, чем предварительно установленный порог; если значение разницы меньше, чем предварительно установленный порог, определение эскалатора в качестве типа целевого лифта/эскалатора; и если значение разницы больше или равно предварительно установленному порогу, определение лифта в качестве типа лифта/эскалатора. Указанный способ реализует соответствующее устройство. Данная группа изобретений позволяет пользователю, находящемуся в большом помещении или здании, быстро и удобно доехать на лифте/эскалаторе до требуемого места, обеспечивая траекторию движения пользователя к соответствующему лифту/эскалатору. 2 н. и 10 з.п. ф-лы, 19 ил.
Комментарии