Способ и устройство определения координат источника радиоизлучения - RU2659808C1
Код документа: RU2659808C1
Чертежи
Описание
Заявляемые объекты объединены одним изобретательским замыслом, относятся к радиотехнике и могут быть использованы в навигационных, пеленгационных, локационных технических средствах для определения местоположения априорно неизвестных источников радиоизлучений (ИРИ) с двух и более летно-подъемных средств (ЛПС).
Известен способ определения координат источников радиоизлучений (см. Пат. РФ №2278395, МПК G01S5/10, опубл. 20.06.2006 г., бюл. №17). Он заключается в приеме сигналов ИРИ на трех ЛПС, ретрансляции сигналов на центральный пункт, принятые ЛПС сигналы подвергают взаимнокорреляционной обработке, а координаты ИРИ вычисляют по разностям радиальных скоростей на основе коэффициентов сжатия путем определения максимума взаимнокорреляционной функции (ВФК) сигналов, ретранслированных с ЛПС.
Недостатком способа-аналога является низкая вероятность обнаружения и точность определения координат. В силу различного удаления объектов от пунктов приема, изменений уровней радиосигналов при распространении различаются и соответствующие значения отношения сигнал / шум. Эти различия в аналоге не учитывают, что снижает точность определения координат.
Наиболее близким по своей технической сущности в заявляемому способу является способ обнаружения и определения координат ИРИ (см. Пат. РФ №2285937, МПК G01S 5/04, опубл. 20.10.2006 г., бюл. №29).
Он заключается в том, что принимают радиоизлучения ИРИ на пространственно разнесенных пунктах приема на летно-подъемных средствах, передают принятые радиосигналы совместно с координатами ЛПС на наземный пункт, рассчитывают нормированный пространственный спектр путем определения модуля взаимнокорреляционной функции (ВКФ) в моменты синхронного попарного приема на пунктах приема сигналов ИРИ, измерения разности моментов прихода радиосигналов ИРИ TD на пунктах приема Lij по максимуму ВКФ из каждой (i, j)-й точки заданного пространства, определения соответствующих задержкам TDij значений квадратов модулей комплексной ВФК в каждой (i, j)-й точке заданного пространства и усреднение их по совокупности пар радиосигналов, измерения значений энергии принятых радиосигналов и их попарных произведений, усреднения значений попарных произведений энергии по совокупности пар радиосигналов, расчета отношений усредненных значений квадратов модулей комплексных ВФК к соответствующим усредненным попарным произведениям энергии радиосигналов, по максимуму которого и сравнения с порогом определяют координаты ИРИ.
Способ-прототип обеспечивает повышение вероятности обнаружения и точности определения координат ИРИ. Положительный эффект достигается благодаря учету различающихся условий приема сигнала (отношения сигнал/шум) на приемных пунктах.
Недостаток способа состоит в значительных временных затратах на определение координат ИРИ, что существенно ограничивает его применение.
Целью заявляемого технического решения является разработка способа определения координат ИРИ, обеспечивающего сокращение временных затрат на определение координат ИРИ при сохранении точностных характеристик благодаря использованию двухэтапной обработки.
Поставленная цель достигается тем, что в известном способе определения координат ИРИ, включающем прием радиоизлучения ИРИ на пространственно разнесенных пунктах приема на ЛПС, определение собственных координат ЛПС, передачу принятых радиосигналов совместно с координатами ЛПС на наземный пункт, расчет нормированного пространственного спектра Zm путем определения квадрата модуля комплексных взаимных корреляционных функций Rm в моменты синхронного попарного приема радиосигналов ИРИ на пунктах приема, измерения значений энергии принятых радиосигналов (







Благодаря новой совокупности существенных признаков в заявленном способе за счет использования двухэтапной обработки входного потока данных достигается положительный эффект в виде существенного сокращения временных затрат на определение координат ИРИ при сохранении точностных характеристик.
Известно устройство определения координат ИРИ (см. Пат РФ №2285937, МПК G01S 5/04 (2006.1), опубл. 20.10.2005 г., бюл. №29). Оно содержит L, L≥3, пространственно разнесенных пунктов приема, каждый из которых включает последовательно соединенные приемную антенну, цифровое радиоприемное устройство, аппаратуру передачи данных, и центральный пункт, содержащий аппаратуру передачи данных, блок быстрого преобразования Фурье, оперативное запоминающее устройство, постоянное запоминающее устройство, буферное запоминающее устройство, блок обратного быстрого преобразования Фурье, блоки определения квадратов модулей, сумматор, блоки определения квадратов модулей, накапливающий сумматор, делитель, блок определения максимума функций, пороговый элемент с соответствующими связями.
Устройство-аналог обеспечивает повышение вероятности обнаружения и точности определения координат ИРИ. Однако, ему присущ недостаток, состоящий в существенных временных затратах на определение координат ИРИ.
Наиболее близким по своей технической сущности к заявляемому устройству определения координат ИРИ является устройство по Пат. РФ №2594759, МПК G01S 5/04 (2006.1), опубл. 20.08.2016 г., бюл. №23. Оно содержит два и более пунктов приема (ПП) на беспилотных летательных аппаратах (БПЛА) и наземный пункт (НП), причем каждый пункт приема содержит последовательно соединенные контроллер, рулевой привод и аэродинамические рули, автопилот, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группой информационных выходов автопилота, двигательную установку, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, первый Z-канальный приемо-передающий модуль, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, вторая группа информационных входов которого соединена с первой группой информационных выходов первого приемопередающего модуля, последовательно соединенные первый блок памяти и передающий модуль, блок навигации БПЛА, группа информационных входов которого соединена со второй группой информационных входов первого блока памяти, антенно-приемный модуль (АПМ), группа информационных выходов которого соединена с первой группой информационных входов первого блока памяти, а группа входов управления соединена со второй группой информационных выходов первого приемо-передающего модуля, а НП выполнен содержащим последовательно соединенные первый блок управления, предназначенный для управления взлетом, полетом и посадкой БПЛА, второй L-канальный приемопередающий модуль и первый блок обработки и отображения информации, последовательно соединенные L-канальный приемный модуль, второй блок управления, предназначенный для задания исходных данных и формирования команды на определение координат ИРИ и второй блок обработки и отображения информации, группа информационных выходов которого является выходной шиной НП, коррелятор, группа информационных выходов которого соединена со второй группой информационных входов второго блока обработки и отображения информации, а группа информационных входов объединена с первой группой входов второго блока управления, вторая группа выходов которого соединена со второй группой информационных входов второго приемо-передающего модуля, второй блок памяти, группа информационных входов которого является второй установочной шиной НП, а группа информационных выходов соединена с третьей группой входов второго блока обработки и отображения информации, а вторая группа информационных входов второго блока управления является первой установочной шиной НП.
Устройство-прототип обеспечивает повышение точности местоопределения ИРИ в УКВ-СВЧ-диапазонах частот благодаря использованию метода синтеза разностной апертуры и оптимизации маршрутов полета носителей.
Недостаток устройства-прототипа состоит в том, что он сохраняет свою работоспособность только при оценивании узкополосных сигналов. Кроме того, ему присущи существенные временные затраты на определение координат ИРИ.
Целью заявляемого технического решения является разработка устройства определения координат ИРИ, обеспечивающего сокращение временных затрат на нахождение местоположения ИРИ и расширение класса оцениваемых сигналов.
Поставленная цель достигается тем, что в известном устройстве определения координат ИРИ, состоящем из двух и более идентичных пунктов приема на беспилотных летательных аппаратах и наземного пункта, причем каждый из пунктов приема содержит последовательно соединенные контроллер, рулевой привод и аэродинамические рули, автопилот, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группой информационных выходов автопилота, двигательную установку, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, первый приемопередающий модуль, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, вторая группа информационных входов которого соединена с первой группой информационных выходов первого приемопередающего модуля, последовательно соединенные первый блок памяти, передающий модуль, блок навигации БПЛА, группа информационных выходов которого соединена со второй группой информационных входов первого блока памяти, антенно-приемный модуль (АПМ), группа информационных выходов которого объединена с первой группой информационных входов первого блока памяти, а группа входов управления соединена со второй группой информационных выходов первого приемопередающего модуля, а НП выполнен содержащим последовательно соединенные блок управления, предназначенный для управления взлетном, полетом и посадкой БПЛА, второй L-канальный приемопередающий модуль и блок обработки и отображения информации, последовательно соединенные L-канальный приемный модуль и коррелятор, и второй блок памяти, дополнительно в НП введены последовательно соединенные тракт первичной обработки сигналов, предназначенный для обнаружения сигналов и определения рабочей зоны, и тракт расчета координат, предназначенный для определения местоположения ИРИ в рабочей зоне, группа информационных выходов которого является выходной шиной НП, а первая группа информационных входов тракта первичной обработки сигналов соединена с группой информационных выходов L-канального приемного модуля, вторая группа информационных входов тракта первичной обработки сигналов соединена с группой информационных выходов коррелятора, третья группа информационных входов объединена с группой информационных входов второго L-канального приемопередающего модуля, четвертой группой информационных входов тракта расчета координат и является первой входной шиной НП, четвертая группа информационных входов является второй входной шиной НП, а вторая группа информационных выходов тракта первичной обработки сигналов соединена с группой информационных входов второго блока памяти, группа информационных выходов которого соединена со второй группой информационных входов тракта расчета координат, третья группа информационных входов которого является третьей входной шиной НП.
При этом тракт первичной обработки сигналов содержит последовательно соединенные блок дискретного преобразования Фурье, делитель, блок поиска максимального значения, блок пороговой обработки, блок измерения задержек сигналов, блок вычисления коэффициентов, блок определения рабочей зоны и блок определения предварительных координат, группа информационных выходов которого является первой группой информационных выходов тракта первичной обработки сигналов, вторая группа информационных выходов которого соединена с группой информационных выходов блока измерения задержки сигналов, вторая группа входов делителя является второй группой информационных входов тракта первичной обработки сигналов, третья группа информационных входов которого соединена со второй группой информационных входов блока пороговой обработки и второй группой информационных входов блока измерения задержки сигналов и одновременно является первой входной шиной НП, вторая группа информационных входов блока определения рабочей зоны является четвертой группой информационных входов тракта первичной обработки сигналов и второй входной шиной НП, а группа информационных входов блока дискретного преобразования Фурье является первой группой информационных входов тракта первичной обработки сигналов.
Тракт расчета координат содержит последовательно соединенные первый вычислитель, предназначенный для деления рабочей зоны с центром (Хс,Yc) на I⋅J одинаковых размеров зон анализа, блок вычисления задержки сигналов, второй вычислитель, предназначенный для определения значения модуля ВКФ, соответствующего запаздыванию сигнала TDij в точках (i,j) рабочей зоны, блок усреднения и блок определения координат, группа информационных выходов которого является группой информационных выходов тракта расчета координат и выходной шиной НП, первая группа информационных входов тракта расчета координат соединена с группой информационных входов первого вычислителя, вторая группа информационных входов которого объединена со второй группой информационных входов блока усреднения и является третьей группой информационных входов тракта расчета координат и третьей входной шиной НП, вторая группа информационных входов второго вычислителя является второй группой информационных входов тракта расчета координат, а вторая группа информационных входов блока измерения задержки сигналов является четвертой группой информационных входов тракта расчета координат и первой входной шиной НП.
Перечисленная новая совокупность существенных признаков за счет того, что вводятся новые элементы и связи, позволяет достичь цели изобретения: обеспечить сокращение временных затрат на нахождение местоположения ИРИ и расширить класс оцениваемых сигналов.
Заявляемые объекты поясняются чертежами, на которых показаны:
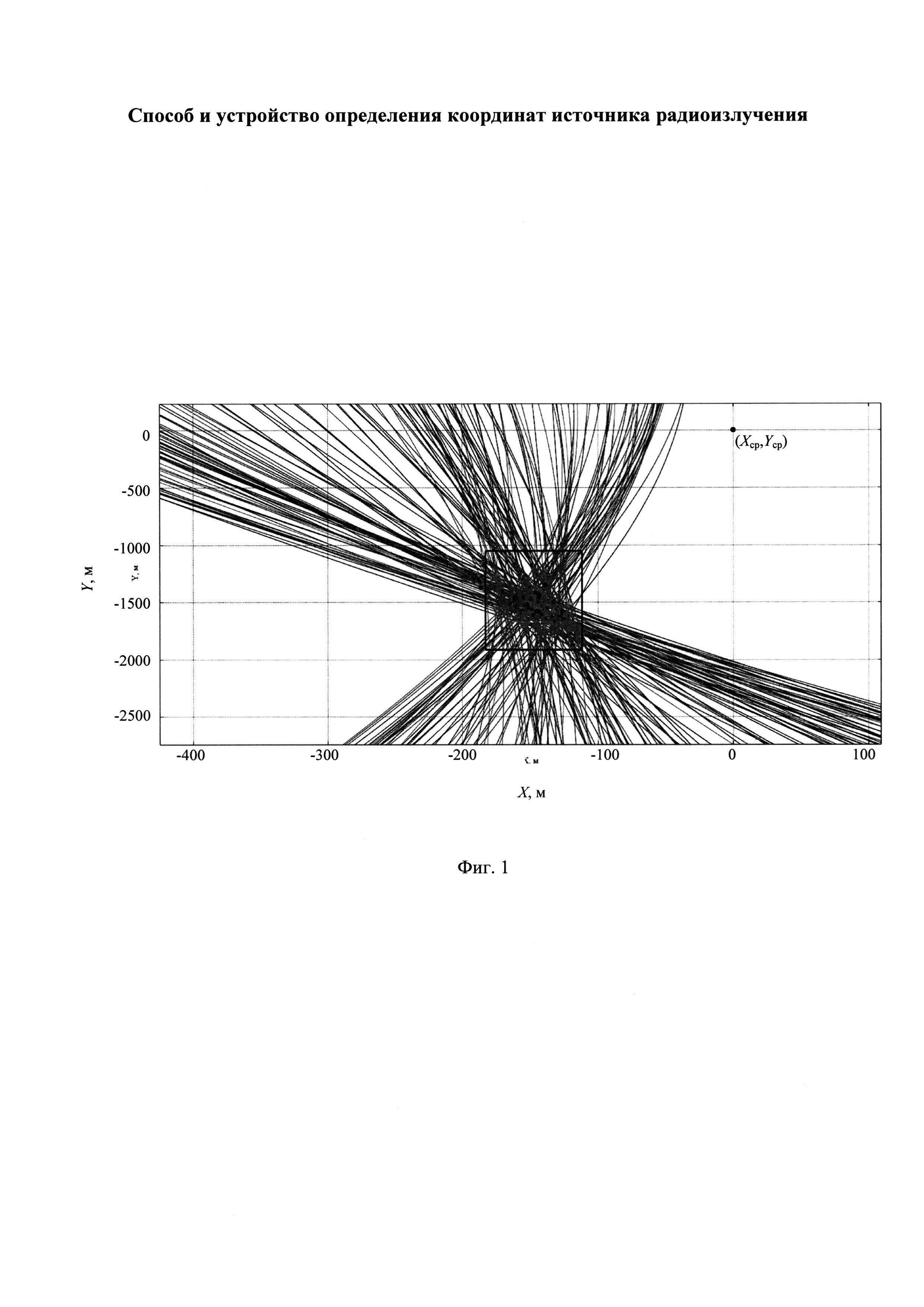
на фиг. 1 - иллюстрируются результаты пеленгования ИРИ с ЛПС в заданном районе;
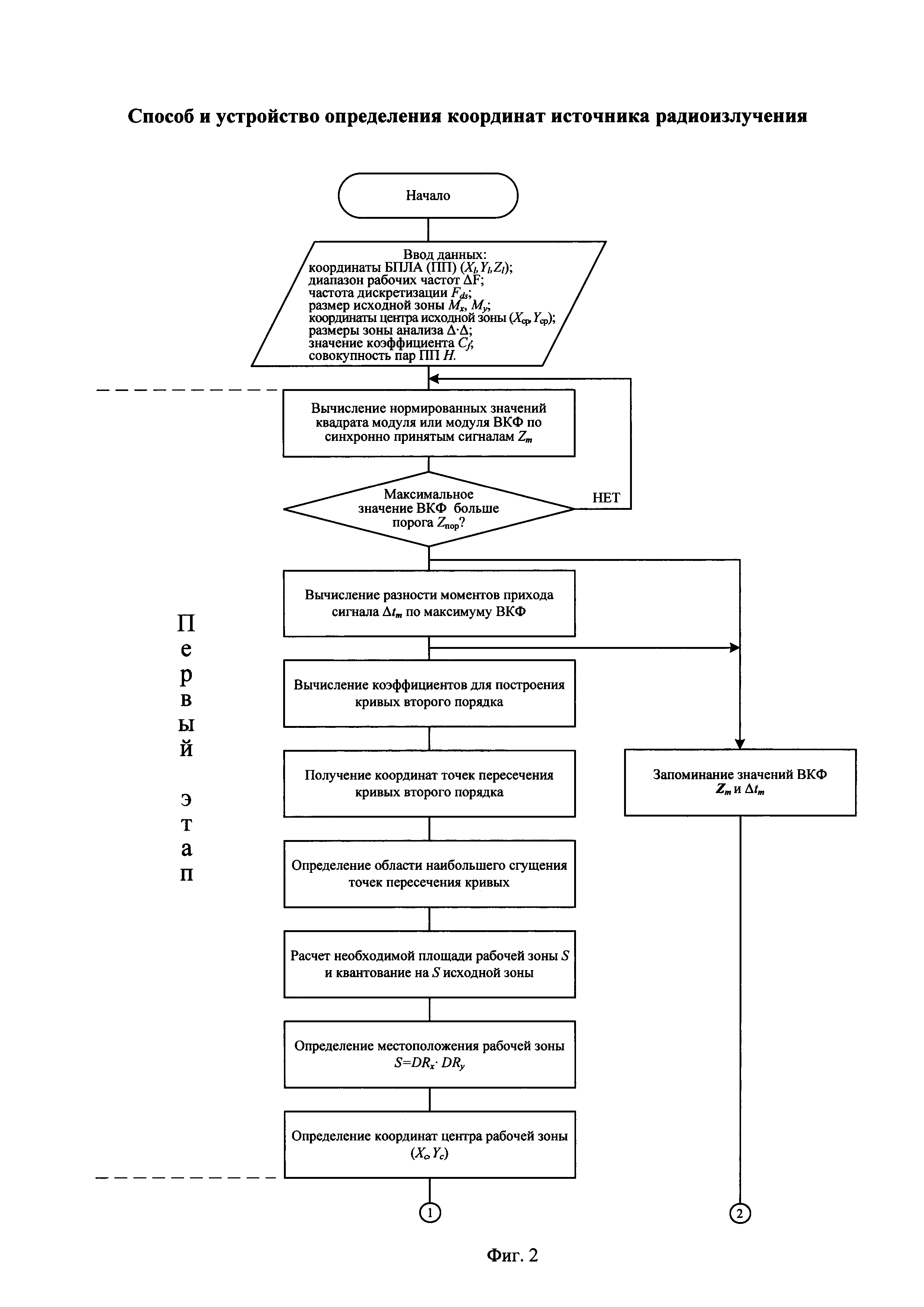
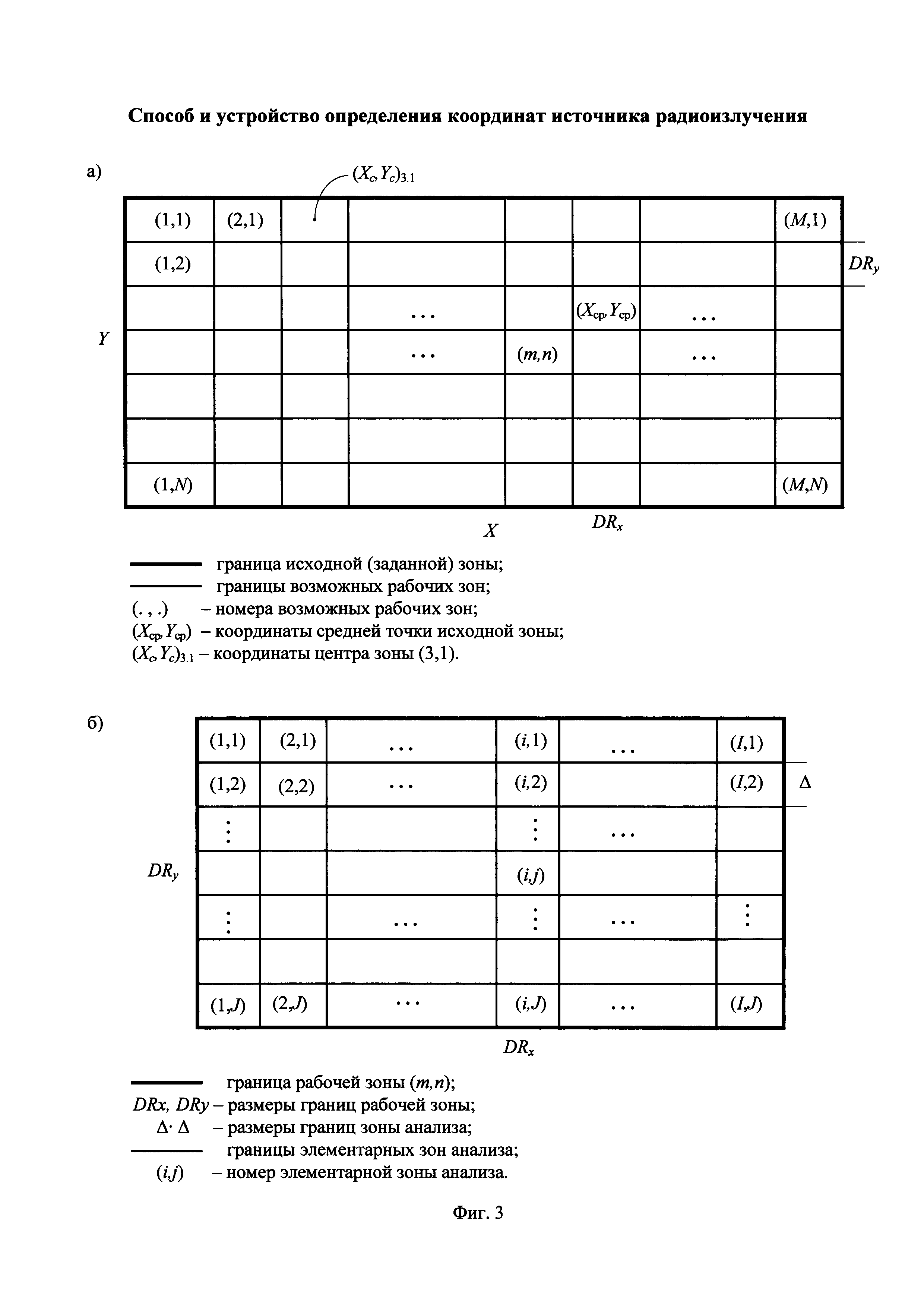
на фиг. 2 - обобщенный алгоритм определения координат источника радиоизлучения;
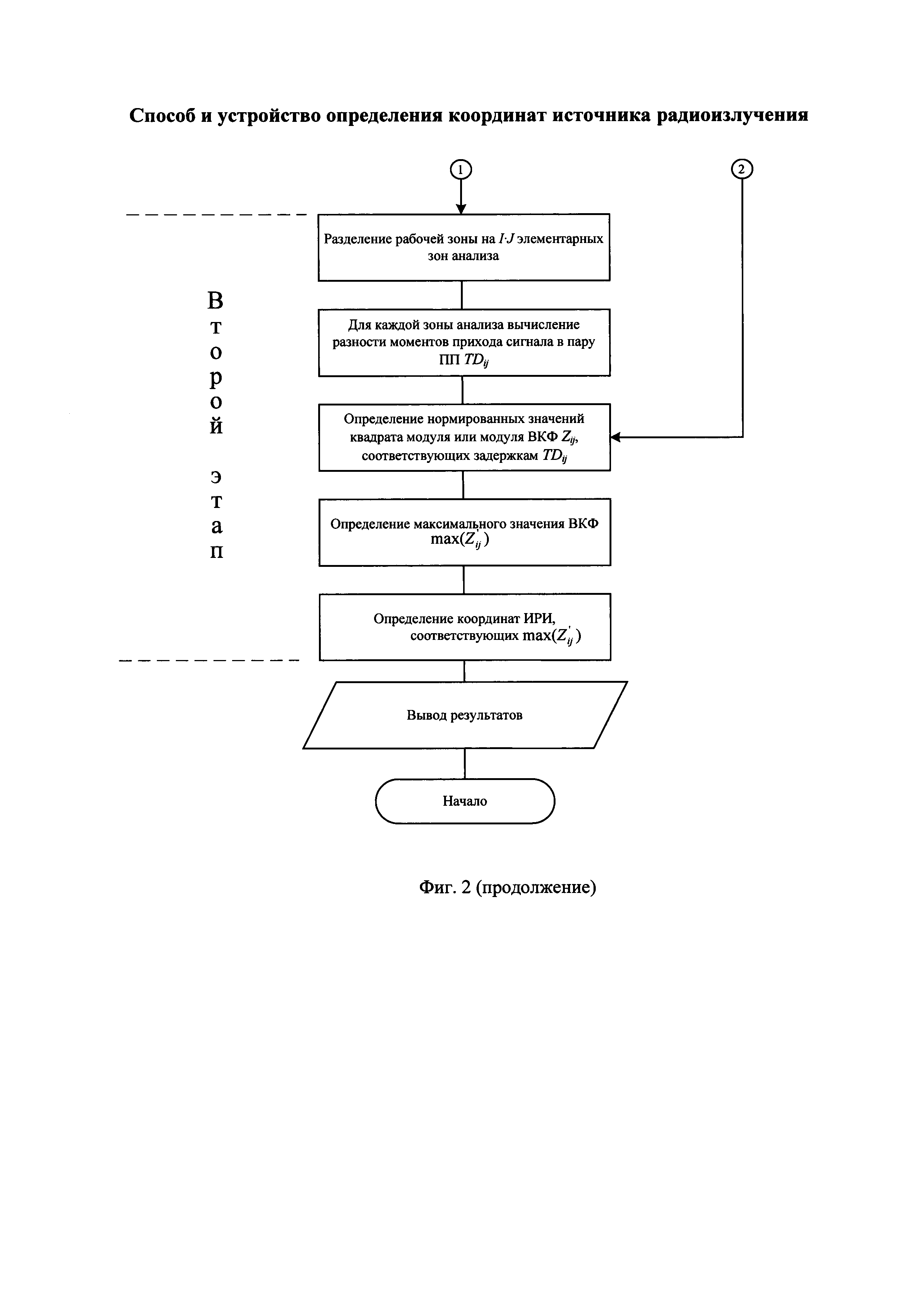
на фиг. 3 - иллюстрации, поясняющие порядок выполнения операций:
а) по делению заданной территории на рабочие зоны и определению координат центра зоны с наибольшим сгущением точек пересечения кривых второго порядка;
б) по делению рабочей зоны на М зон анализа;
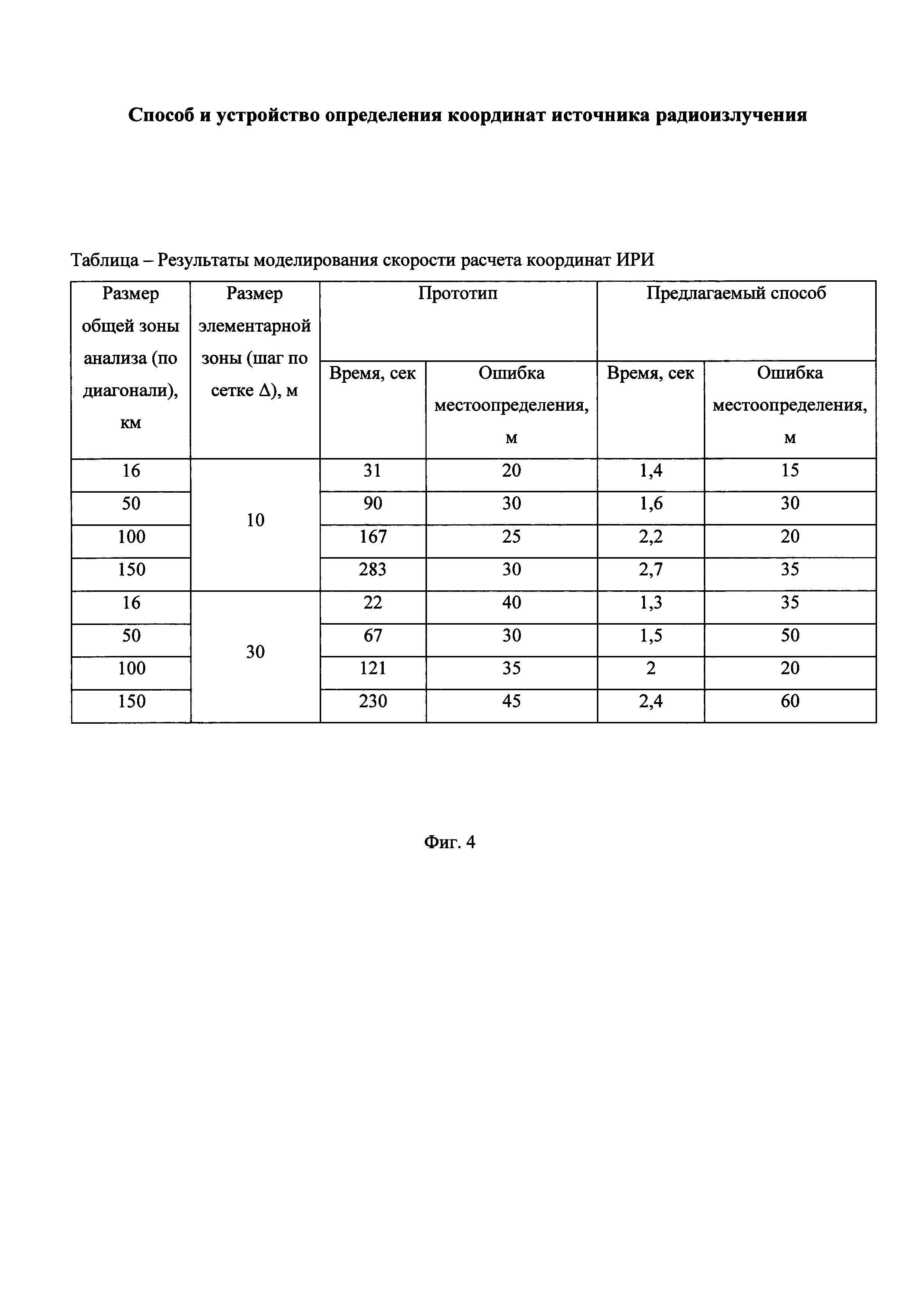
на фиг .4 - представлены результаты оценки эффективности предлагаемого способа определения координат ИРИ;
на фиг. 5 - обобщенная структурная схема устройства определения координат ИРИ;
на фиг. 6 - иллюстрируются:
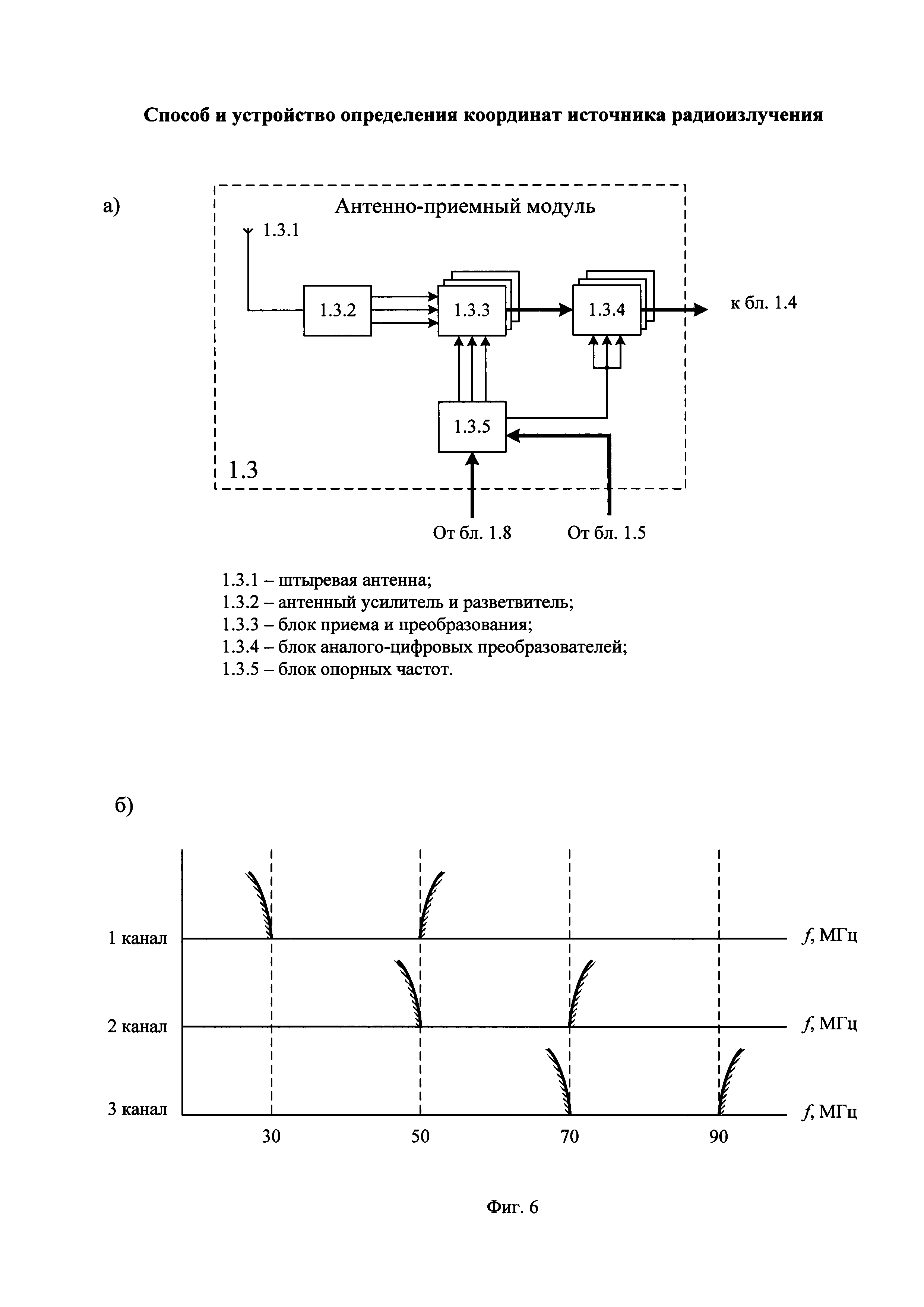
а) структурная схема антенно-приемного модуля;
б) порядок настройки приемных трактов АПМ;
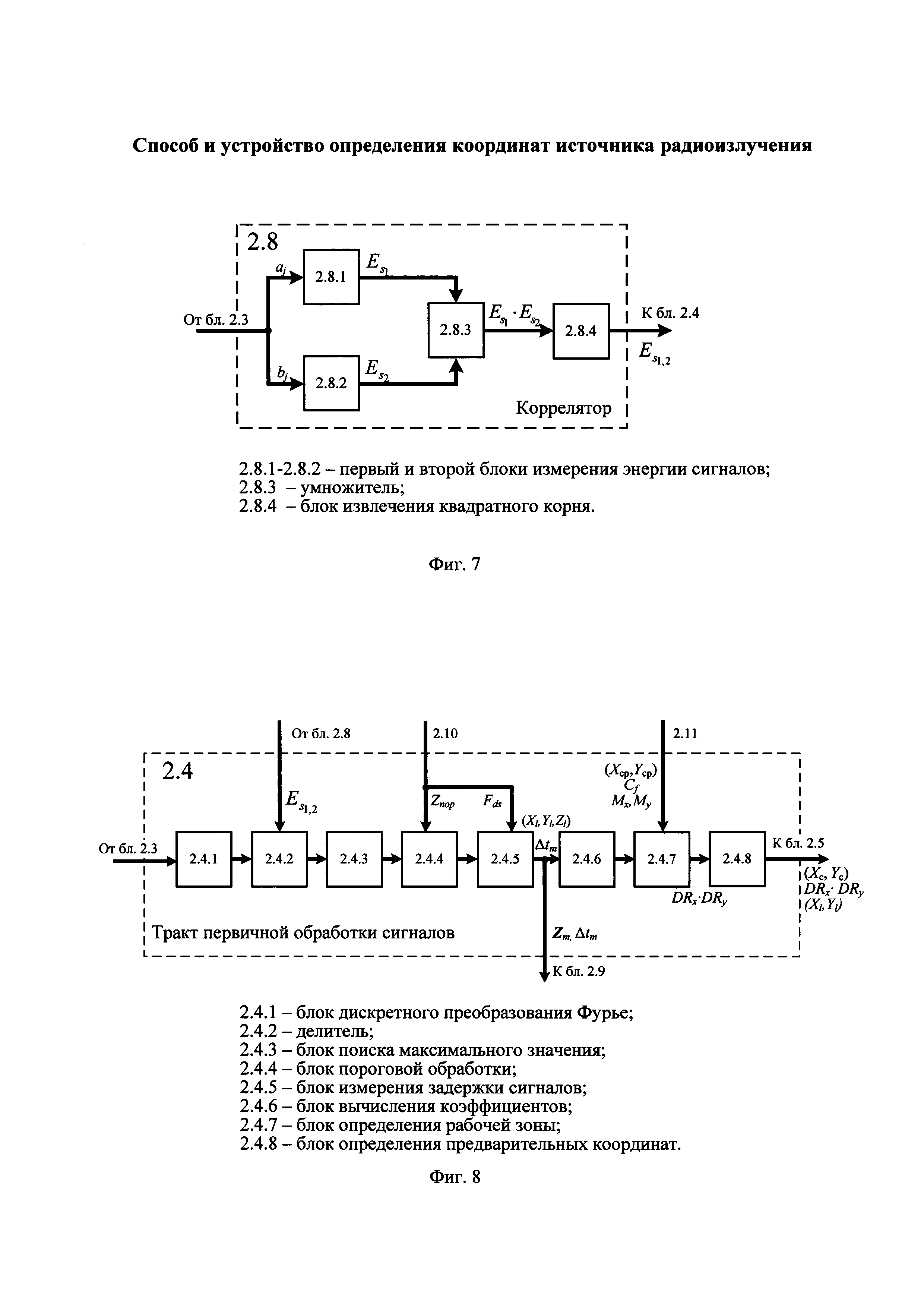
на фиг. 7 - структурная схема коррелятора;
на фиг. 8 - структурная схема тракта первичной обработки сигналов;
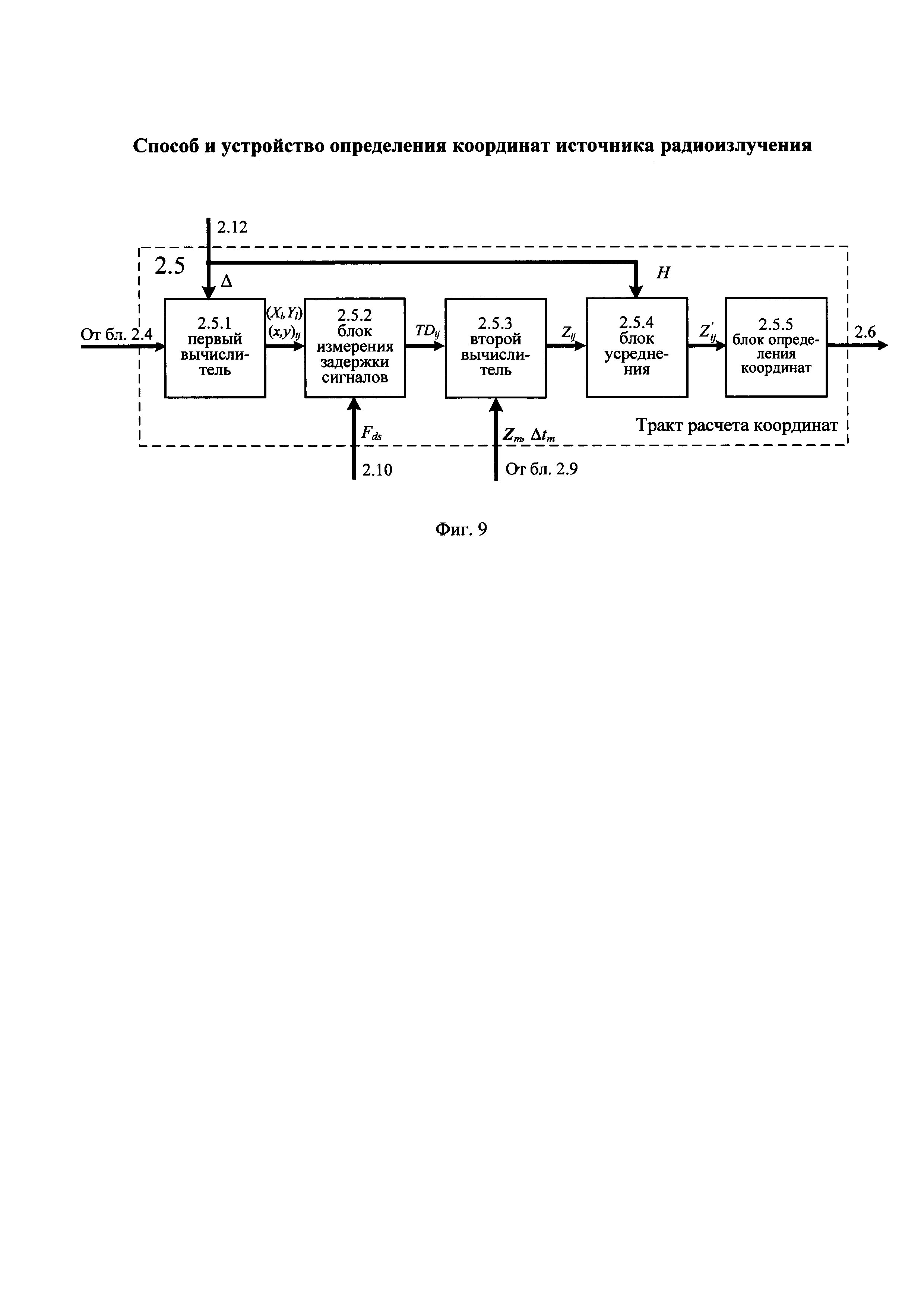
на фиг. 9 - структурная схема тракта расчета координат;
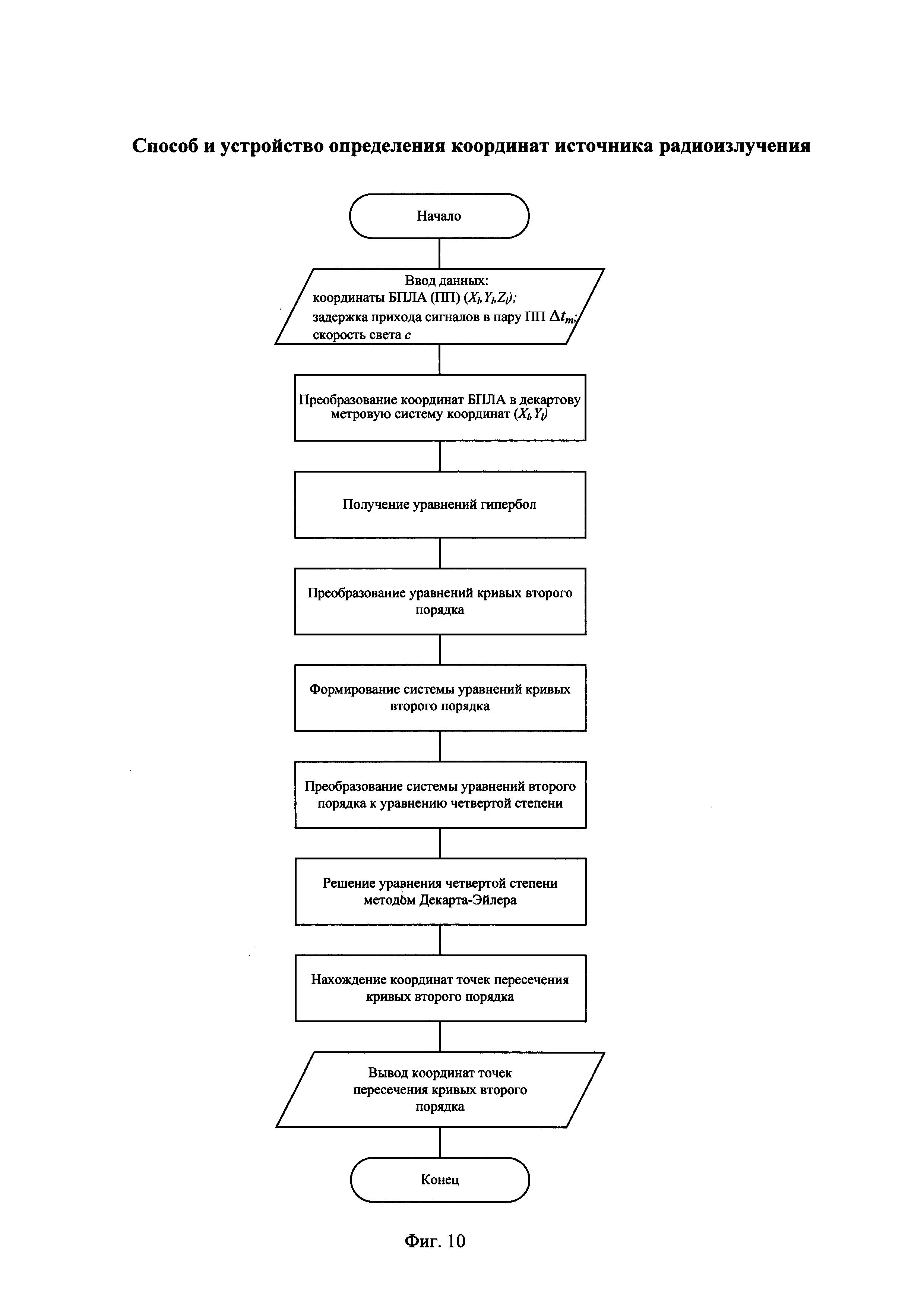
на фиг. 10 - алгоритм работы блока вычисления коэффициентов;
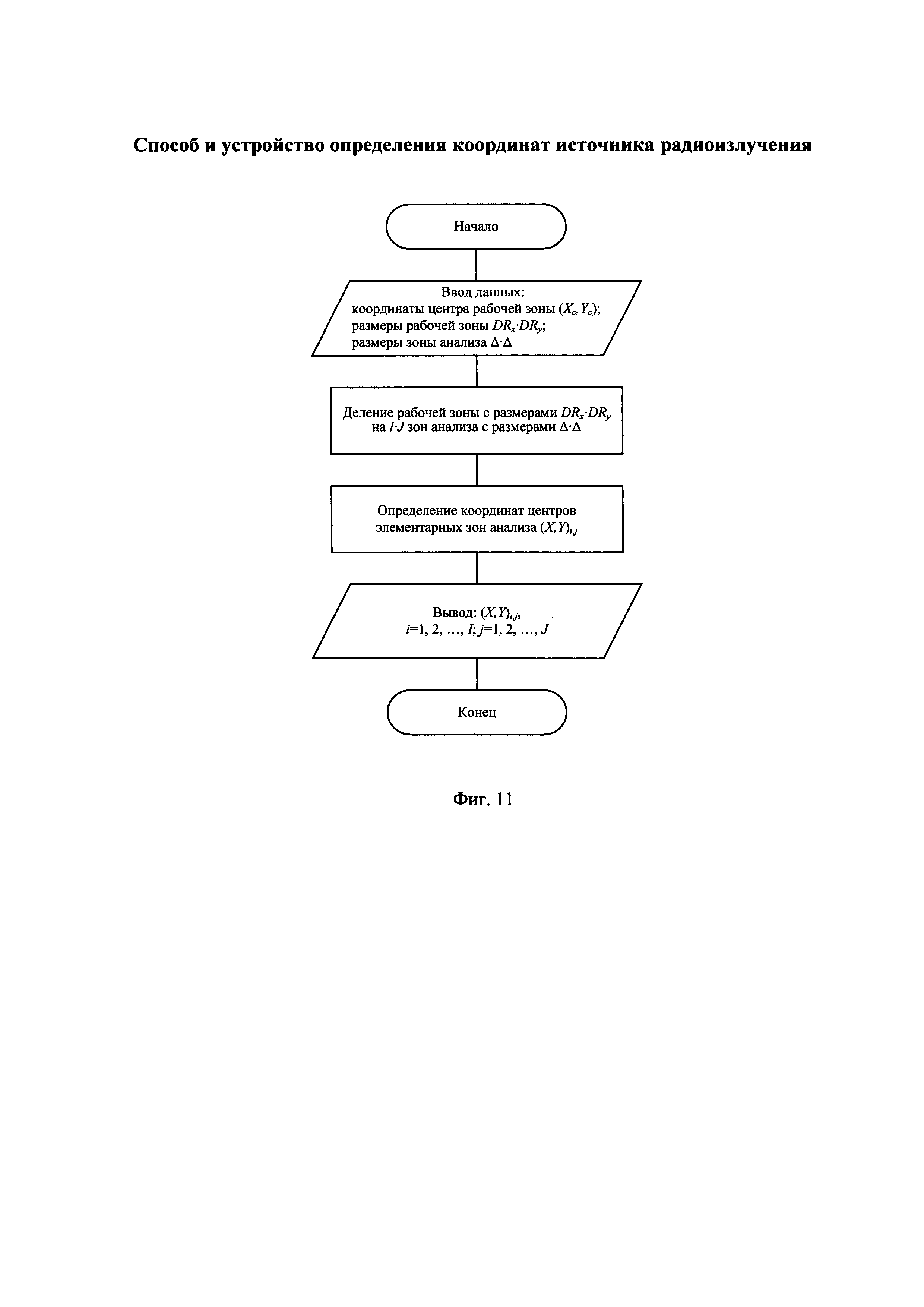
на фиг. 11 - алгоритм работы первого вычислителя;
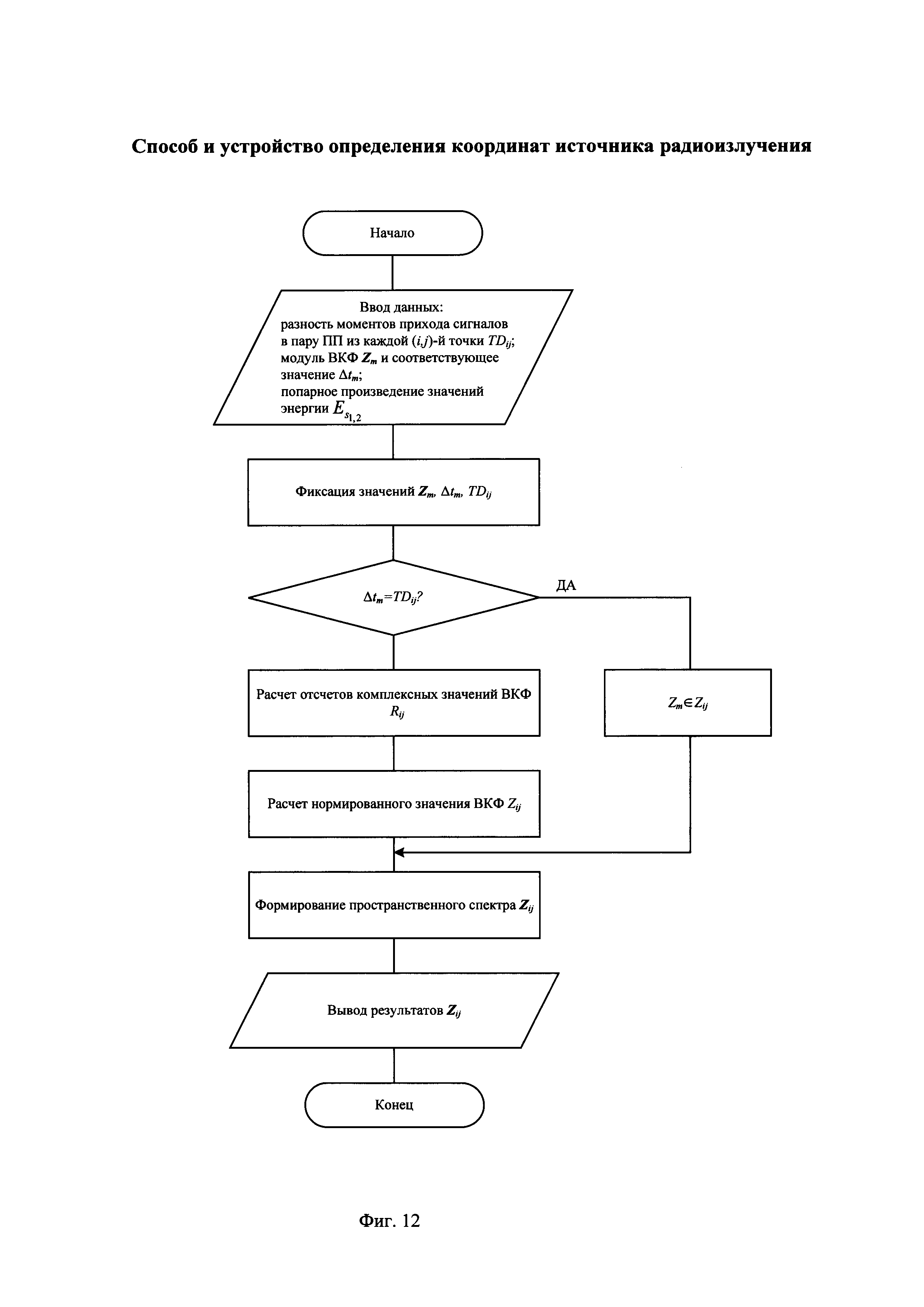
на фиг. 12 - алгоритм работы второго вычислителя.
На фиг. 1 показаны результаты определения пространственных параметров (пеленгования) с ЛПС сигналов ИРИ в исходной (заданной) зоне контроля. Здесь приведена нижняя левая часть исходной зоны, центр которой находится в точке с координатами (Xcp, Ycp). Сложная сигнально-помеховая обстановка (большое число ИРИ в полосе анализа), кратковременность работы существенно осложняют определение их координат. Возможна ситуация, когда на одной частоте одновременно работают несколько пространственно разнесенных излучателей. Последнее регулярно наблюдается при использовании измерителей на ЛПС.
Сущность изобретения состоит в следующем. В рамках предложенных материалов акцент сделан на сокращение временных затрат на определение координат широкополосных ИРИ в УКВ-СВЧ-диапазонах частот с использованием беспилотных летательных аппаратов разностно-дальномерным способом, что является экономически обоснованным. В предлагаемых способе и устройстве для решения поставленной задачи на первом этапе грубо определяют район местоположения излучателя. Для этого вычисляют точки пересечения всех линий положения (гипербол) в исходной зоне и далее определяют ее часть (рабочую зону) с наибольшим их сгущением. На втором этапе используют одноэтапный разностно-дальномерный способ определения координат, описанный в прототипе. В результате достигается резкое сокращение количества вычислений (временных затрат), соизмеримое с сокращением площади исходной зоны до рабочей при сохранении заданных точностных характеристик.
Реализация способа достигается следующей последовательностью действий (см. фиг. 2 и 3). На подготовительном этапе выполняют синхронизацию приемных трактов ПП на БПЛА с точностью 100 нс.
С помощью пространственно разнесенных L, L≥2, пунктов приема, размещенных на ЛПС (БПЛА) осуществляют прием сигналов ИРИ. Принятый на интервале времени [t0; tc] высокочастотный сигнал преобразуют в электрический сигнал промежуточной частоты, дискретизируют с частотой Fds и квантуют его, формируют две последовательности отсчетов квадратурных составляющих на нулевой частоте. Всего получают Is=Ts⋅Fds комплексных отсчетов сигнала ИРИ за время Ts=tc-t0.
Измеренные значения квадратурных составляющих сигнала, принятые на L ПП (обычно L=2) совместно с данными о пространственном положении ПП
Результаты синхронного приема сигналов, полученные двумя ПП, на НП преобразуют с помощью дискретного преобразования Фурье и получают отсчеты квадрата модуля комплексных значений взаимной корреляционной функции (ВКФ):

где


Одновременно измеряют энергетический параметр каждого принятого парой ПП сигнала

Далее определяют попарные произведения значений энергии различных радиосигналов, принятых на пространственно разнесенных ПП в соответствии с выражением

В случае использования в дальнейшей обработке комплексных отсчетов модуля ВКФ

Значения взаимных корреляционных функций, полученных в (1), нормируют к попарным произведениям энергий соответствующих сигналов (3)

На следующем этапе определяют максимальное значения модуля ВКФ

Полученное максимальное значение MR сравнивают с заданным пороговым уровнем. При выполнении пороговых условий принимают решение о наличии радиоизлучения, а полученная величина функции взаимной корреляции поступает на дальнейшую обработку.
Далее вычисляют позицию максимума ВКФ MR относительно центра массива {Zm} (обозначим как Ns). При этом значения всех отсчетов ВКФ запоминают и далее используют на втором этапе определения координат ИРИ. На основе полученного значения Ns определяют задержку прихода сигнала в пару пунктов приема

Полученное значение Δtm запоминается совместно с соответствующим значением Zm и также используется на втором этапе измерений.
После этого приступают к вычислению коэффициентов для построения кривых второго порядка (гипербол). Для этого координаты каждого ПП переводят в локальную декартову метрическую систему координат. На этом этапе не используют координаты по высоте, так как для уточнения высоты расположения ИРИ будут использованы значения трехмерного пространственного спектра, полученные на втором этапе. Обозначаем координаты ПП (БПЛА) как (X1,Y1) и (X2,Y2), а искомые координаты ИРИ (X,Y).
Тогда уравнение гиперболы имеет вид

Беспилотные летательные аппараты, летящие на расстоянии нескольких километров друг от друга, периодически синхронно записывают выборки сигнала ИРИ. Каждая запись пары ПП позволяет получить уравнение кривой второго порядка (7). На их основе осуществляют расчет координат точек пересечения кривых второго порядка между собой (каждой с каждой) путем нахождения совокупности решений системы уравнений. Порядок нахождения коэффициентов кривых второго порядка и точек их пересечения приведен в Приложении.
Далее осуществляют поиск области наибольшего сгущения точек пересечения кривых второго порядка. Для этого по всей исходной зоне вычисляют среднее отклонение названных точек от центральной точки зоны с координатами (Xcp,Ycp)

где k=1,2,…,K - количество точек пересечения;

После этого приступают к вычислению размера окна поиска (рабочей зоны). Последняя определяется как

где

Следующей выполняемой операцией является поиск координат центра выбранной рабочей зоны (Xc,Yc). Пусть область с максимальным количеством точек пересечения кривых второго порядка оказалась с номером (m,n). Тогда координаты центра выбранной рабочей зоны вычисляют следующим образом

где Mx, My - максимальные отклонения по осям координат от центра исходной зоны (Xcp,Ycp).
На втором этапе рабочую зону делят на области в соответствии с шагом квантования Δ, который выбирают из условия обеспечения требуемой точности определения координат ИРИ. Точка с номером (i,j) имеет координаты

где Xc, Yc - координаты центра рабочей зоны, (i, j) - нумерация точек в рабочей зоне.
Таким образом, оценку пространственных параметров сигнала в предлагаемом способе осуществляют с шагом Δ в дискретных точках пространства, которое ограничивается пределами рабочей зоны.
Для каждой точки выделенного пространства вычисляют взаимное запаздывание моментов прихода электромагнитной волны в каждую пару ПП:

где
Взаимное запаздывание дано в единицах периода дискретизации для согласования при последующей обработке.
Для каждой точки (i,j) рабочей зоны определяют значение модуля ВКФ Zi,j (выражение 4), соответствующее запаздыванию сигнала (12) (значение модуля ВКФ в точках временного сдвига, равных взаимному запаздыванию). Последние дополняются значениями Zm с соответствующими временными сдвигами Δtm, полученными на первом этапе измерений. Это позволяет сократить временные затраты на вычисление совокупности Zij.
Далее значение модуля ВКФ в каждой точке рабочей зоны (i,j) усредняют по совокупности пар ПП:

где Zi,j,η - значение модуля ВКФ, полученное в (i,j)-той точке рабочей зоны от η-той пары ПП, η=1,2,…, Н.
В результате суммирования по совокупности пар ПП, в решающей пространственной статистике (13) содержится информация обо всей совокупности значений модулей комплексных ВКФ рабочей зоны с учетом энергии принятых сигналов.
На завершающем этапе по совокупности всех I⋅J точек рабочей зоны определяют максимальное значение решающей статистики

и соответствующие ей координат ИРИ
Предлагаемый способ сохраняет свою работоспособность при использовании двух ПП (H=1). В этом случае операция (13) не выполняется. В приведенной на фиг. 4 таблице представлены результаты моделирования по оценке скорости расчета координат ИРИ в прототипе и предлагаемом способе. Количество синхронно принятых выборок сигнала составило 160, полоса частот оцениваемого сигнала 10 МГц, количество ПП - два. Размер исходной зоны по диагонали варьировал в пределах 16-150 км. Размеры элементарной зоны анализа Δ составляли 10 и 30 м. Из моделирования видно, что оба способа имеют близкую к линейной зависимость временных затрат от размера исходной зоны. Количество вычислений на определение координат растет пропорционально увеличению площади анализа, а соответственно требует и существенно большие временные затраты. При этом определение координат ИРИ в предлагаемом способе по сравнению с прототипом потребовало от 1,5 до 8 раз меньше времени. Моделирование выполнено для условий, при которых сохраняются точностные характеристики.
Выполнена экспериментальная проверка предлагаемого способа определения координат ИРИ. В качестве носителей ПП использовались два БПЛА «Орлан-10» производства ООО «Специальный Технологический Центр» г. Санкт-Петербург. Результаты эксперимента хорошо согласуются с результатами моделирования.
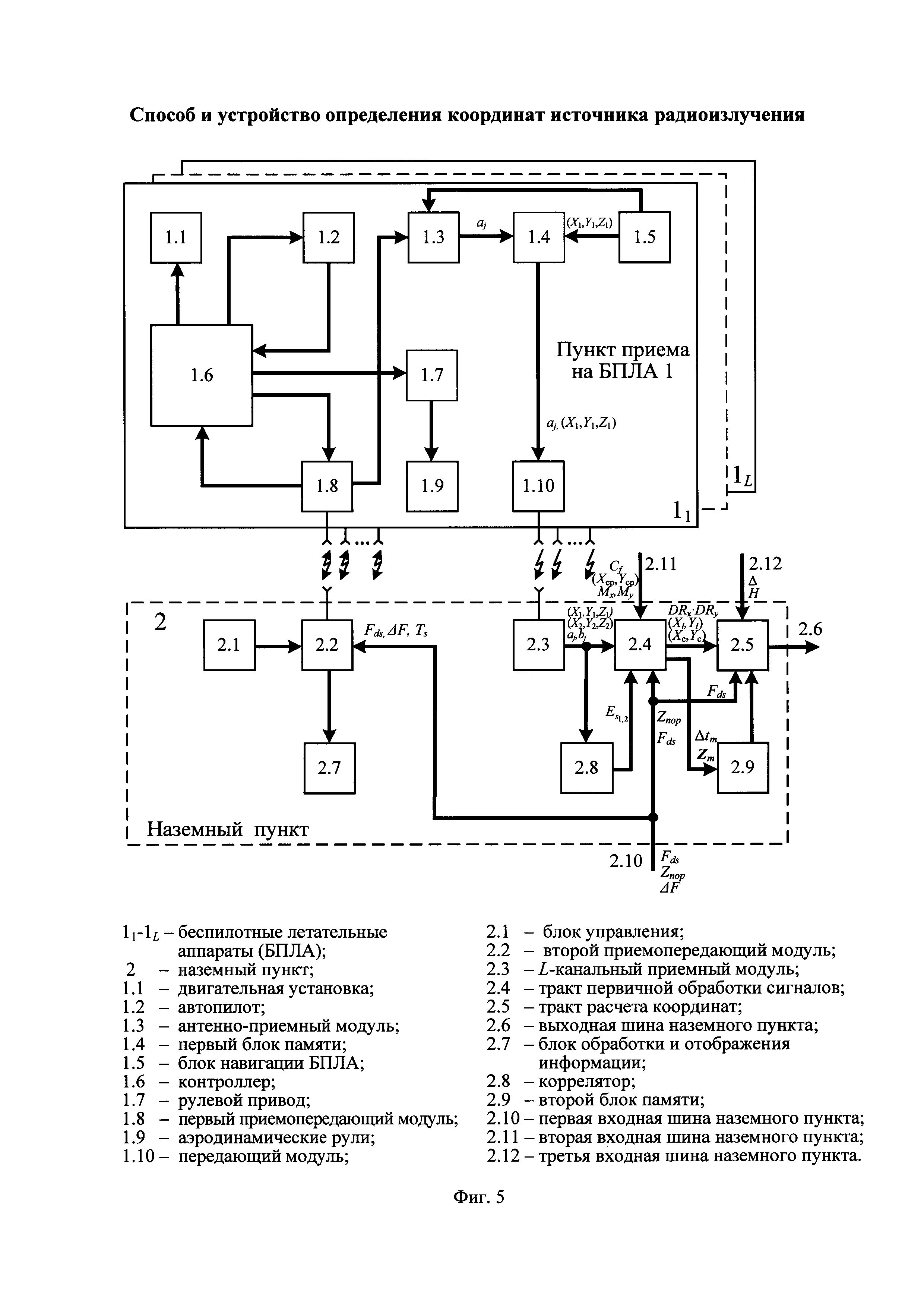
Устройство определения координат источника радиоизлучения (см. фиг. 5) содержит два и более идентичных пункта приема 1.1-1.Z на беспилотных летательных аппаратах и наземный пункт 2, причем каждый пункт приема


Тракт первичной обработки сигналов (см. фиг. 8) содержит последовательно соединенные блок дискретного преобразования Фурье 2.4.1, делитель 2.4.2, блок поиска максимального значения 2.4.3, блок пороговой обработки 2.4.4, блок измерения задержки сигналов 2.4.5, блок вычисления коэффициентов 2.4.6, блок определения рабочей зоны 2.4.7 и блок определения предварительных координат 2.4.8, группа информационных выходов которого является первой группой информационных выходов тракта первичной обработки сигналов 2.4, вторая группа информационных выходов которого соединена с группой информационных выходов блока измерения задержки сигналов 2.4.5, вторая группа входов делителя 2.4.2 является второй группой информационных входов тракта первичной обработки сигналов 2.4, третья группа информационных входов которого соединена со второй группой информационных входов блока пороговой обработки 2.4.4 и второй группой информационных входов блока измерения задержки сигналов 2.4.5 и одновременно является первой входной шиной 2.10 НП2, вторая группа информационных входов блока определения рабочей зоны 2.4.7 является четвертой группой информационных входов тракта первичной обработки сигналов 2.4 и второй входной шиной 2.11 НП2, а группа информационных входов блока дискретного преобразования Фурье 2.4.1 является первой группой информационных входов тракта первичной обработки сигналов 2.4.
Тракт расчета координат 2.5 (см. фиг. 9) содержит последовательно соединенные первый вычислитель 2.5.1, предназначенный для деления рабочей зоны с центром (Хс, Yc) на I⋅J одинаковых размеров зон анализа, блок измерения задержки сигналов 2.5.2, второй вычислитель 2.5.3, предназначенный для определения значения модуля взаимной корреляционной функции, соответствующего запаздыванию сигнала TDi,j в точках (i,j) рабочей зоны, равных взаимному запаздыванию, блок усреднения 2.5.4 и блок определения координат 2.5.5, группа информационных выходов которого является группой информационных выходов тракта расчета координат 2.5 и выходной шиной 2.6 наземного пункта 2, первая группа информационных входов тракта расчета координат 2.5 соединена с первой группой информационных входов первого вычислителя 2.5.1, вторая группа информационных входов которого объединена со второй группой информационных входов блока усреднения 2.5.4 и является третьей группой информационных входов тракта расчета координат 2.5 и третьей входной шиной 2.12 наземного пункта 2, вторая группа информационных входов второго вычислителя 2.5.3 является второй группой информационных входов тракта расчета координат 2.5, а вторая группа информационных входов блока измерения задержки сигналов 2.5.2 является четвертой группой информационных входов тракта расчета координат 2.5 и первой входной шиной 2.10 НП2.
Работа устройства осуществляется следующим образом (см. фиг. 5-9). На подготовительном этапе по первой входной шине 2.10 наземного пункта 2 задают диапазон рабочих частот ΔF, значения Fds, Ts, Zпор. По второй входной шине 2.11 наземного пункта 2 задают координаты центра зоны контроля (Xcp, Ycp), значение коэффициента


Управление взлетом, полетом и посадкой БПЛА













Непосредственное участие в измерении координат ИРИ на борту БПЛА






С помощью антенно-приемных модулей 1.31 и 1.32 ПП1, размещенных на БПЛА, осуществляют прием сигналов ИРИ (см. фиг. 6).
Принятый антенным элементом (АЭ) блока



Измеренные значения квадратурных составляющих aj (bj) сигнала поступают на первую группу информационных входов первого блока памяти 1.4i. Одновременно с выхода блока

Комплексные отсчеты aj и bj сигнала Si(t) первого и второго пунктов приема соответственно совместно с их координатами (X1,Y1,Z1) и (X2,Y2,Z2) через L-канальный приемный модуль 2.3 поступают на первую группу информационных входов тракта первичной обработки сигналов 2.4. Кроме того, значения aj и bj поступают на группу информационных входов коррелятора 2.8 (см. фиг. 7). В функцию последнего входит определение попарных произведений значений энергии различных радиосигналов, принятых на пространственно разнесенных ПП в соответствии с выражениями 2 и 3. Результаты вычислений



В функции тракта расчета координат 2.5 входит деление выбранной рабочей зоны с шагом квантования Δ (выражение 11), вычисление взаимного запаздывания моментов прихода сигналов в каждую пару ПП (выражение 12), определение для каждой точки (ij) модуля ВКФ в соответствии с (4), усреднении модулей ВКФ в каждой точке рабочей зоны (ij) по совокупности пар ПП (выражение 13), определение максимального значения решающей статистики по совокупности всех Ψ точек рабочей зоны (14) и соответствующих ей координат ИРИ. Для решения названных выше задач на первую группу информационных входов тракта 2.5 поступают размеры рабочей зоны DRx⋅DRy и координаты центра (Хс, Yc). На вторую группу информационных входов поступают значения модуля ВКФ Zm, полученные на первом этапе работы устройства (трактом 2.4) и запомненные в буферном блоке памяти 2.9. На третью группу информационных входов и тракта 2.5 через третью входную шину НП 2.10 задают значение шага квантования Δ рабочей зоны и количество пар ПП Н, сигналы которых используют в обработке. На выходе блока 2.5 и наземного пункта 2 (выходная шина 2.6) формируются координаты обнаруженного источника радиоизлучения.
Предлагаемое устройство обеспечивает определение координат ИРИ с заданной точностью Δ для широкого класса сигналов УКВ-СВЧ-диапазонов частот. При этом практические испытания показали рост точностных характеристик устройства с увеличением ширины спектра сигналов. Устройство сохраняет свою работоспособность при ширине спектра сигнала 8-10 кГц.
Все функциональные элементы и блоки предполагаемого устройства широко освещены в литературе и серийно выпускаются.
В качестве БПЛА
Антенно-приемный модуль (АПМ) 1.3 предназначен для приема сигналов ИРИ в заданном диапазоне частот, преобразования их на промежуточную частоту, например, 90 МГц, с последующим преобразованием принятых сигналов в цифровую форму (см. фиг. 6). Его реализация известна и трудностей не вызывает. Модуль 1.3 содержит последовательно соединенные штыревую антенну 1.3.1, антенный усилитель и разветвитель 1.3.2, блок приема и преобразования 1.3.3 и блока аналого-цифровых преобразователей 1.3.4, группа информационных выходов которого является группой информационных выходов антенно-приемного модуля 1.3, блок опорных частот 1.3.5, первая группа входов которого является входом управления антенно-приемного модуля 1.3, вторая группа входов является опорным входом антенно-приемного модуля 1.3, первый, второй и третий выходы блока 1.3.5 соединены с опорными входами соответствующих приемных каналов блока приема и преобразования 1.3.3, а четвертый выход соединен с опорными входами блока аналого-цифрового преобразователей.
Работа антенно-приемного модуля осуществляется следующим образом. Принимаемый антенной 1.3.1 сигнал усиливается в блоке 1.3.2 и через разветвитель поступает на входы трехканального блока приема и преобразования 1.3.3. Последний предназначен для одновременного приема радиосигналов, например, в полосе 60 МГц, обеспечения предварительной селекции сигналов и преобразования их на промежуточную частоту, например, 90 МГц. Полоса
Принятые в блоке 1.3.3 и преобразованные сигналы с выходов приемных каналов поступают на соответствующие входы трехканального блока аналого-цифровых преобразователей 1.3.4. Здесь принятые сигналы раскладываются на квадратуры и оцифровываются. В результате на выходе модуля 1.3 формируется цифровой поток квадратур, принятых в полосе 60 МГц.
Реализация всех элементов модуля 1.3 известна. Блок приема и преобразования 1.3.3 предназначен для одновременного приема сигналов в широкой 60 МГц полосе частот и преобразование их на промежуточную частоту, например, 90 МГц. Его реализация известна и трудностей не вызывает (см. Фомин Н.Н., Буга Н.Н. и др. Радиоприемные устройства: Учебник для вузов. - 3-е изд., стереотип. - М.: Горячая линия-Телеком, 2007. - С. 520; Головин О.В. Радиоприемные устройства, - М.: Горячая линия - Телеком, 2004 г.).
Блок аналого-цифровых преобразователей 1.3.4 может быть реализован на серийно выпускаемых фирмой ZETlab Studio изделиях (http://www.zetlab.ru/catalog/). Возможны и другие реализации блока 1.3.4 (см. «Профессиональное оборудование и технологии» http://www.protehnology.ru/page/about/).
Блок опорных частот 1.3.5 предназначен для формирования высокостабильного сигнала с частотой 120 МГц. Он содержит опорный генератор, обеспечивающий формирование высокостабильного аналогового сигнала с частотой 10 МГц (выполняется на основе DDS-синтезатора).
С выхода синтезатора сигнал с уровнем - 4 дБм поступает на усилитель с коэффициентом усиления 14 дБ и далее на формирователь меандра с частотой 120 МГц. Последний целесообразно изготовить на компараторе ADCMP 551 фирмы Analog Devices (http://www.analog.com/media/en/technical-documentation/data-sheets/ADCMP551_552_553.pdf).
Антенный усилитель может быть реализован с помощью изделия фирмы IKUSI SBA 110, а разветвитель: TLPG-3E фирмы LANS. В качестве 1.3.1 использован согласованный несимметричный вибратор.
Первый блок памяти


Реализация блока навигации 1.5 известна и трудностей не вызывает. Для обеспечения более высокой точности местоопределения (3-5 м) блок 1.5 может быть реализован в соответствие с Пат. РФ №№2553270, 2371733 или 2374659.
Управление БПЛА «Орлан-10» реализуют с первого АРМ (блоки 2.1, 2.2 и 2.7) по низкоскоростному каналу связи на заданных частотах в режиме псевдослучайной перестройки рабочей частоты. По этому каналу (блоки 2.2 и 1.8) осуществляют задание маршрута полета, высоту полета и порядок облета: проход на высоте или барражирование и т.д. Управляющая информация формируется с помощью блока 2.1, в качестве которого может использоваться ноутбук. Кроме того, по первой входной шине 2.10 на подготовительном этапе через модуль 2.2 задают рабочий диапазон частот ΔF и частоту дискретизации Fds.
Результаты измерений на НП 2 с бортов БПЛА 11 и 12 поступают по соответствующим высокоскоростным каналам радиосвязи на второе АРМ. Дальность связи зависит от высоты полета и местных условий и в среднем составляет 100-130 км. С помощью второго АРМ осуществляют обнаружение, распознавание и определение координат заданных ИРИ.
Коррелятор 2.8 (см. фиг. 7) предназначен для выполнения вычислений в соответствии с выражениями (2) и (3). Его реализация известна и трудностей не вызывает (см., например, пат. РФ№1840069, МПК G06F 17/15; Залмазон Л.А. Преобразование Фурье, Уолша, Харра и их применение в управлении, связи и других областях. - М.: Наука, 1989. - 496 с.).
Второй блок памяти 2.9 представляет собой буферное запоминающее устройство, предназначенное для совместного хранения значений Zm и Δtm. Реализуется аналогично блоку 1.4.
Тракт предварительной обработки сигналов 2.4 реализует основные операции первого этапа измерений координат ИРИ (см. фиг. 2 и 8), а именно - определение области с наибольшим количеством точек пересечения кривых второго порядка, размеров рабочей зоны DRx⋅DRy координат ее центра (Хс, Yc).
Тракт первичной обработки сигналов 2.4 (см. фиг. 8) содержит последовательно соединенные блок дискретного преобразования Фурье 2.4.1, делитель 2.4.2, блок поиска максимального значения 2.4.3, блок пороговой обработки 2.4.4, блок измерения задержки сигналов 2.4.5, блок вычисления коэффициентов 2.4.6, блок определения предварительных координат 2.4.7 и блок определения рабочей зоны 2.4.8.
С помощью блока 2.4.1 осуществляют дискретное преобразование Фурье для получения отчетов модуля комплексных значений взаимной корреляционной функции Rm в соответствии с (1). В рамках работы выполнен анализ информативности применения в расчетах квадрата модуля ВКФ Rm. Исследования показали, что использование квадрата модуля ВКФ Rm или просто модуля ВКФ


Найденное в блоке 2.4.3 максимальное значение Mr=max{Zm} с группы информационных выходов далее поступает на группу информационных входов блока пороговой обработки 2.4.4. На вторую группу его информационных входов воздействует пороговое значение Zпор, задаваемое на подготовительном этапе по первой установочной шине 2.10. При выполнении пороговых условий max {Zm}>Znop принимается решение о наличии (обнаружении) сигнала, а полученная нормированная функция взаимной корреляции Zm поступает на дальнейшую обработку - группу информационных входов блока измерения задержки сигналов 2.4.5.
В блоке 2.4.5 определяют позицию (местоположение) максимума относительно центра массива (в числе отсчетов, обнаруженных как Ns) и рассчитывают задержку прихода сигнала в пару ПП. Последняя определяется в соответствии с (6). При этом значение частоты дискретизации Fds поступает на вторую группу информационных входов блока 2.4.5 по первой входной шине 2.10 НП2. Полученные значения Δt далее следуют на группу информационных входов блока вычисления коэффициентов 2.4.6. Кроме того, значения Zm и Δtm поступают на группу информационных входов второго блока памяти 2.9 и используются далее на втором этапе работы устройства в тракте 2.5.
В функции блока 2.4.6 входит вычисление коэффициентов для построения кривых второго порядка - гипербол и точек их пересечения. Для этого в блоке 2.4.6 координаты каждого ПП, установленного на БПЛА, принятые модемом 2.3 и ретранслированные блоками 2.4.1-2.4.5, переводятся в локальную декартову метрическую систему координат. Далее решается система уравнений четвертой степени методом Декарта-Эйлера (см. Приложение).
Координаты точек пересечения в локальной декартовой метрической системе координат с группы выходов блока 2.4.6 поступают на группу информационных входов блока определения рабочей зоны 2.4.7. В его функции входит поиск области наибольшего сгущения точек пересечения кривых второго порядка. С этой целью блоком 2.4.7 по всей исходной зоне вычисляется среднее отклонение названных точек от средней точки (Хср, Ycр) в соответствии с (8). Значение (Хср, Ycр) поступает на вторую группу информационных входов блока 2.4.7 по второй входной шине 2.11 НП2 на подготовительном этапе. Далее вычисляется размер окна поиска (рабочей зоны) DRx⋅DRy в соответствии с (9).
Найденное значение размера рабочей зоны DRx⋅DRy с группы выходов блока 2.4.7 поступает на группу информационных входов блока определения предварительных координат 2.4.8. В функции блока 2.4.8 входит разбиение (квантование) исходной зоны на элементы с размерами DRx⋅DRy. После этого определяется зона с наибольшим количеством точек пересечения кривых второго порядка и координаты ее центра (Хс, Yc) в соответствии с (10). На выходе блока 2.4.8 формируется информация о размере рабочей зоны DRx⋅DRy и координатах ее центра (Хс, Yc), которая поступает на первую группу информационных входов тракта расчета координат 2.5.
Реализация блока дискретного преобразования Фурье 2.4.1 известна (см. АС СССР №1288717, G06F 15/332; Л.А. Залмандон. Преобразование Фурье, Уолша, Харра и их применение в управлении связи и других областях. - М.: Наука, Гл. ред. физ.-мат. лит., 1989. - 496 с.) и трудностей не вызывает. Кроме того, блок 2.4.1 совместно с блоками 2.4.2, 2.4.3 и 2.9 могут быть реализованы с помощью стандартных плат, субмодуля цифрового приема ADMDDC2WB и ADP60PCI v.3.2 на процессоре Shark ADSP-21062 (см. руководство пользователя e-mail: insys@arc.ru www-сервер www/insys.ru).
Блок пороговой обработки 2.4.4 реализуется на дискретных элементах (элементарной логике) по известным схемам (см. Рэд Э. Справочное пособие по высокочастотной схемотехнике. Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Блок измерения задержки сигнала 2.4.5 представляет собой делитель, реализующий выражение (6). Его выполнение известно и трудностей не вызывает, реализуется аналогично блоку 2.4.2.
Блок вычисления коэффициентов 2.4.6 представляет собой вычислитель, обеспечивающий:
перевод координат БПЛА, полученных от GPS, в декартову метровую систему координат;
получение уравнений гиперболы (7);
расчет координат точек пересечения кривых второго порядка путем решения системы уравнений четвертой степени (см. Приложение).
Для решения поставленных задач на группу информационных входов блока 2.4.6 поступают координаты БПЛА (ретранслируются блоками 2.4.1-2.4.5) и значение Δt. Значение скорости света с постоянно хранится в блоке 2.4.6. Может быть реализован на первом сигнальном процессоре TMS 320с6416 (см. TMS 320с 6416: http://focus/ti/com/docs/prod/folrs/print/TMS320c6416.html), а алгоритм работы блока 2.4.6 приведен на фиг. 10.
Блок определения рабочей зоны 2.4.7 реализует вычисление среднего отклонения точек пересечения кривых второго порядка от серединной точки исходной зоны с координатами (Хср, Ycр) (задаются на подготовительном этапе по шине 2.11) в соответствии с (8) с последующим определением размеров рабочей зоны DRx⋅DRy (выражение 9). Может быть реализован совместно с блоками 2.4.1-2.4.5 на первом сигнальном процессоре TMS 320с 6416. Кроме того, возможен вариант изготовления устройства, когда значение DRx⋅DRy задают на подготовительном этапе. В этом случае необходимость в блоке 2.4.7 отпадает.
Блок определения предварительных координат 2.4.8 предназначен для разбиения исходной зоны на равных размеров DRx⋅DRy зоны с последующим определением одной из них с наибольшим количеством точек пересечения. После этого в выбранной рабочей зоне определяют координаты ее центра (Хс, Yc) в соответствии с (10). Реализуется совместно с блоком 2.4.6 на первом сигнальном процессоре TMS 320с 6416.
Тракт расчета координат 2.5 реализует второй этап обработки сигналов и содержит последовательно соединенные первый вычислитель 2.5.1, блок измерения задержки сигнала 2.5.2, второй вычислитель 2.5.3, блок усреднения 2.5.4 и блок определения координат 2.5.5.
Координаты центра рабочей зоны (Хс, Yc) и ее размеры DRx⋅DRy с группы информационных выходов тракта 2.4 поступают на первую группу информационных входов тракта 2.5 (первую группу информационных входов первого вычислителя 2.5.1. На вторую группу информационных входов блока 2.5.1 подается значение Δ, задаваемое на подготовительном этапе по третьей входной шине 2.12. Первый вычислитель 2.5.1 предназначен для деления рабочей зоны с размерами DRx⋅DRy на I⋅J одинаковых размеров (с дискретностью Δ) зон анализа в соответствии с (11) и вычисления координат центров этих зон. Реализация блока 2.5.1 трудностей не вызывает. Может быть реализован на втором сигнальном процессоре TMS 320с 6416, алгоритм работы которого приведен на фиг. 11.
В блоке измерения задержки сигналов 2.5.2 для каждой точки (i,j) выделенного пространства, i=1, 2, …, j=1, 2, …, J, вычисляют взаимное запаздывание моментов прихода электромагнитной волны в каждую пару ПП в соответствии с (12). Для этого используют координаты центров зон анализа (x,y)ij и ПП

Второй вычислитель 2.5.3 предназначен для определения значений модуля ВКФ Zij, соответствующих запаздыванию TDij в точках (ij) рабочей зоны. Данная операция выполняется в соответствии с выражениями (1)-(4). Целесообразно реализовать совместно с блоками 4.5.1 и 4.5.2 на втором сигнальном процессоре TMS 320с 6416. Для сокращения вычислений используются значения ВКФ Zm с соответствующими задержками Δtm, полученные на первом этапе (поступают на вторую группу информационных входов блока 2.5.3 от блока 2.9).
Блок усреднения 2.5.4 предназначен для усреднения модулей ВКФ Zij для каждой точки (i,j) по совокупности пар ПП H в соответствии с (13). Для реализации этой функции на первую группу информационных входов блока усреднения 2.5.4 поступают значения ВКФ Zij. По второй группе информационных входов блока 2.5.4 задают совокупность пар ПП Н. Значение Н определяется на подготовительном этапе и поступает в блок 2.5.4 по третьей входной шине 2.12.
Реализация блока трудностей не вызывает, может быть реализован на делителях с переменным (программируемым) коэффициентом в совокупности с сумматорами на базе интегральных микросхем К 561 ИЕ 14 (см. Вениаминов В.Н., Лебедев О.Н., Мирошниченко А.И. Микросхемы и их применение: Справ. пособие. - 3-е изд., перераб. и доп. - М.: Радиосвязь, 1989. - 240 с.).
Блок определения координат 2.5.5 предназначен для определения по совокупности всех I⋅J точек рабочей зоны максимального значения решающей статистики

Изложенное выше указывает, что блок 2.5.5 представляет собой последовательно соединенные блок поиска максимального значения и дешифратор. Реализация блока 2.5.5 известна и трудностей не вызывает (см. Рэд Э. Справочное пособие по высокочастотной схемотехнике. Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Приложение
Методика расчета коэффициентов для построения кривых второго порядка (гипербол) и поиска точек их пересечения
Обозначим координаты БПЛА в локальной метрической системе координат (без учета координат по высоте) (Х1, Y1) и (Х2, Y2), а искомые координаты ИРИ (X,Y).
Уравнение гиперболы приобретает вид

Введем обозначения:

Уравнение кривой второго порядка приводим к виду:

где






Беспилотные летательные аппараты, летящие на расстоянии нескольких километров друг от друга, периодически синхронно записывают выборки сигналов. Каждая такая запись пары БПЛА позволяет получить уравнение кривой второго порядка (П.1).
Далее выполняют расчет координат точек пересечения всех кривых второго порядка между собой путем решений системы уравнений:

После преобразований приводят систему (П.3) к уравнению четвертой степени, которое решают методом Декара-Эйлера.
Далее отбрасывают корни с ненулевой мнимой компонентой, а для вещественных находят соответствующие координаты точек пересечения двух кривых второго порядка (см. Справочник по математике для инженеров и учащихся вузов Броншнейн И.Н., Семендяев К.А. - М.: Наука. Глав, редак. физ.-мат. литературы. 1981, стр. 170-171).
Реферат
Изобретение относится к радиотехнике и может быть использовано для определения местоположения источника радиоизлучения (ИРИ) с летно-подъемного средства методом пассивной радиолокации. Достигаемым техническим результатом является сокращение временных затрат на определение координат ИРИ при сохранении точностных характеристик. Технический результат достигается путем избирательной (в два этапа) обработки входного потока сигналов. На первом этапе грубо определяют район с наибольшим сгущением точек пересечения кривых второго порядка (гипербол). На втором этапе только в рамках этого района вычисляют координаты ИРИ с заданной точностью на основе разности времен прихода сигналов с учетом соотношения сигнал/шум. Устройство определения координат ИРИ, реализующее способ, содержит два и более пунктов приема на БПЛА в составе антенно-приемного модуля, блока памяти, радионавигатора, средств связи и управления БПЛА, и наземный пункт, состоящий из первого автоматизированного рабочего места (АРМ), предназначенного для управления полетом БПЛА, и второго АРМ, предназначенного для расчета координат. В состав второго АРМ входят тракт первичной обработки сигналов, тракт расчета координат, модуль связи и коррелятор с соответствующими связями. 2 н. и 2 з.п. ф-лы, 12 ил.
Формула





Комментарии