Способ и устройство коррекции картографических данных - RU2727164C1
Код документа: RU2727164C1
Чертежи






Описание
[Область техники]
[0001]
Настоящее изобретение относится к способу коррекции картографических данных и устройству коррекции картографических данных.
[Уровень техники]
[0002]
Известно беспроводное устройство, оборудованное в транспортном средстве, которое работает для измерения текущей позиции транспортного средства, задает направление движения и полосу движения, чтобы рассматриваемое транспортное средство передвигалось в направлении перекрестка, из картографической информации, ассоциированной с измеренной текущей позицией транспортного средства, и выполняет связь между транспортными средствами для заданной информации (см. патентный документ 1: JP2010–259021A, например).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2010–259021A
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Картографические данные, включающие в себя информацию о полосе движения, содержат ошибки относительно фактической позиции и направления полосы движения. Следовательно, в методике, описанной в Патентном Документе 1, транспортное средство не может быть точно позиционировано относительно полосы движения на картографических данных на основе измеренной позиционной информации рассматриваемого транспортного средства и картографических данных.
[0005]
Задача, которая должна быть решена с помощью настоящего изобретения, состоит в том, чтобы предоставить способ коррекции картографических данных и устройство коррекции картографических данных, с помощью которых позиция транспортного средства может быть точно определена относительно полосы движения на картографических данных.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает вышеупомянутую задачу посредством исполнения первого процесса коррекции равномерного смещения картографических данных в целом, чтобы таким образом уменьшить первую ошибку, которая является основной ошибкой позиции картографических данных, и исполнения второго процесса коррекции уменьшения второй ошибки, которая является ошибкой позиции, которая остаётся на картографических данных даже после равномерного смещения картографических данных в целом.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению степень отклонения между фактической полосой движения и полосой движения на картографических данных может быть уменьшена. Таким образом, позиция рассматриваемого транспортного средства может быть точно определена относительно полосы движения на картографических данных.
[Краткое описание чертежей]
[0008]
ФИГ.1 является блок–схемой, иллюстрирующей структуру устройства коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
ФИГ.2 является диаграммой для описания ошибок между фактическими полосами движения и полосами движения, включенными в картографические данные.
ФИГ.3 является диаграммой, иллюстрирующей пример траектории передвижения транспортного средства и граничные линии полосы движения, сохраненные в запоминающем устройстве, иллюстрированном на фиг. 1.
ФИГ.4 является диаграммой, иллюстрирующей состояние, в котором граничные линии полосы движения, сохраненные в запоминающем устройстве, иллюстрированном на фиг. 1, и картографические данные, предварительно сохраненные в блоке картографической информации, иллюстрированном на фиг. 1, совмещены.
ФИГ.5 является диаграммой для описания первого способа вычисления ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте.
ФИГ.6 является диаграммой для описания первого способа вычисления ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте.
ФИГ.7 является диаграммой для описания фрагментов карты.
ФИГ.8 является диаграммой, иллюстрирующей состояние, в котором картографические данные равномерно смещены.
ФИГ.9 является диаграммой для описания первого способа для определения величины коррекции искаженной ошибки.
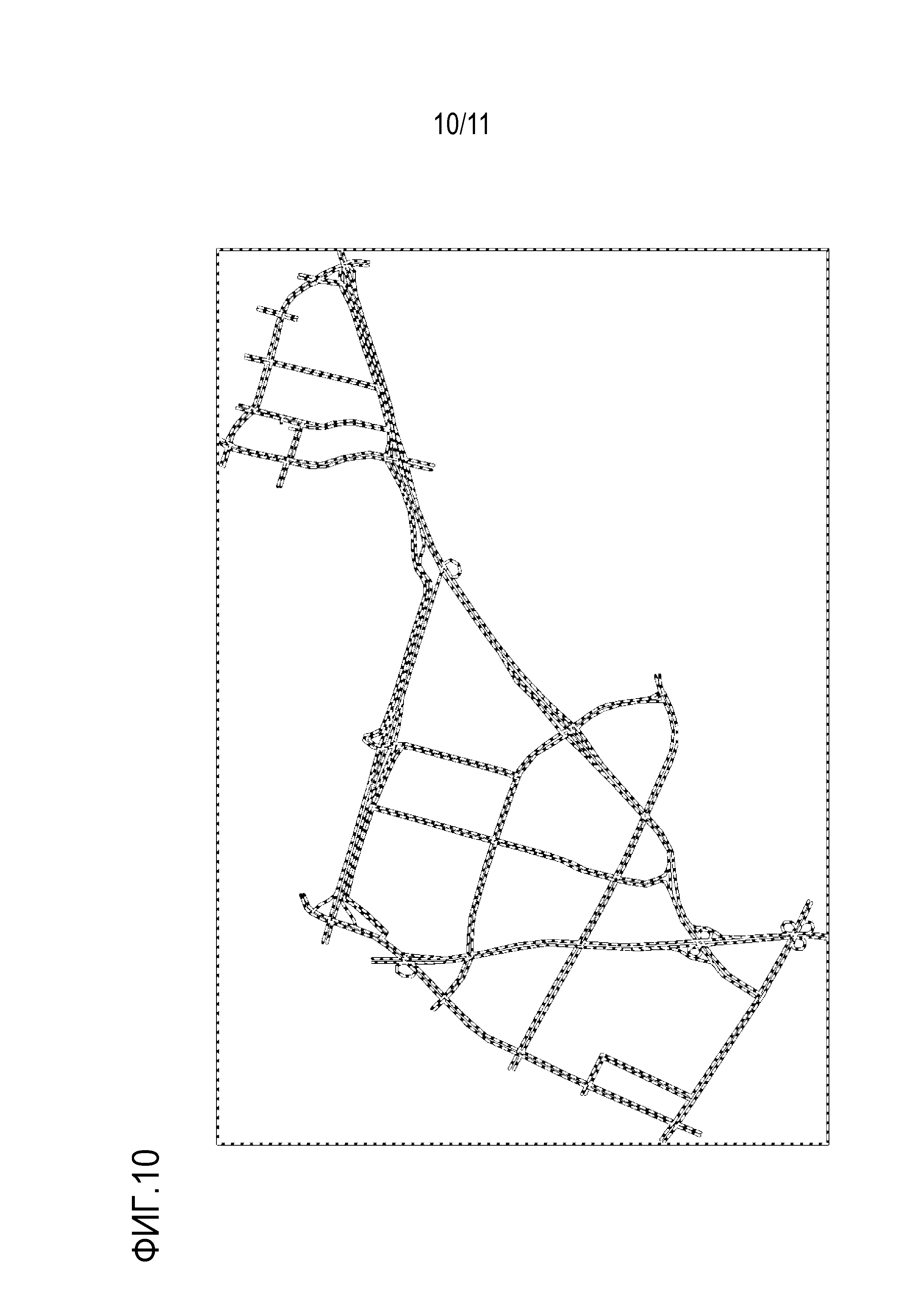
ФИГ.10 является диаграммой, иллюстрирующей состояние, в котором картографические данные, смещенные равномерно, корректируются на основе величины коррекции искаженной ошибки.
ФИГ.11 является последовательностью операций для описания процесса коррекции картографических данных, исполняемого посредством устройства коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
[Режим(ы)для осуществления изобретения]
[0009]
Далее один или несколько вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи. ФИГ.1 является блок–схемой, иллюстрирующей схему устройства 100 коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Устройство 100 коррекции картографических данных, иллюстрированное на этой фигуре, работает для коррекции картографических данных таким образом, чтобы уменьшать ошибки позиции, содержащиеся на карте с высоким разрешением (карте HD, в дальнейшем называемой просто «картографическими данными»), используемой для помощи при вождении или при автономном ( автоматизированном) вождении. В одном или нескольких вариантах осуществления настоящего изобретения ошибки позиции картографических данных включают в себя ошибки между граничными линиями полосы движения, сохраненными в запоминающем устройстве 104, которые будут описаны ниже, и граничными линиями полосы движения, включенными в картографические данные, ошибки между траекториями передвижения транспортных средств, сохраненными в запоминающем устройстве 104, и центрами полос движения, включенными в картографические данные, и ошибки между признаками (целевыми объектами), сохраненными в запоминающем устройстве 104, признаками (целевыми объектами), включенными в картографические данные.
[0010]
ФИГ. 2 является диаграммой для описания ошибок между фактическими полосами движения и полосами движения, включенными в картографические данные. Как иллюстрировано на упомянутой фигуре, как правило, возникают ошибки между фактическими позициями и направлениями полос движения (обозначены сплошными линиями) и позициями и направлениями полос движения (обозначены пунктирными линиями), включенными в картографические данные. Устройство 100 коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения поэтому функционирует для коррекции позиций и направлений полос движения на картографических данных, тем самым уменьшая степени отклонения между фактическими позициями и направлениями полос движения и позициями и направлениями полос движения, включенными в картографические данные.
[0011]
Как проиллюстрировано на фиг. 1, устройство 100 коррекции картографических данных включает в себя устройство 101 обнаружения позиции, блок 102 картографической информации, блок 103 датчика, запоминающее устройство 104 и контроллер 110. В системе согласно одному или нескольким вариантам осуществления настоящего изобретения устройство 101 обнаружения позиции, блок 102 картографической информации, блок 103 датчика, запоминающее устройство 104 и контроллер 110 оборудованы в транспортном средстве, и они соединены друг с другом через расположенную на борту локальную сеть 106, такую как локальная сеть контроллера (CAN). В альтернативном варианте осуществления блок 102 картографической информации, запоминающее устройство 104 и контроллер 110, могут быть не оборудованы в транспортном средстве, и они могут быть предоставлены в центре данных или других аналогичных объектах, соединенных с бортовым оборудованием посредством сети связи.
[0012]
Контроллер 110 включает в себя постоянное запоминающее устройство (ПЗУ), которое предварительно сохраняет программы для достижения заданных функций, которые будут описаны ниже, и центральный процессор (ЦП), который исполняет программы, предварительно сохраненные в ПЗУ.
[0013]
Устройство 101 обнаружения позиции, которое включает в себя приемник глобальной системы определения местоположения (GPS), оборудованный в транспортном средстве, принимает радиоволны от спутников GPS для обнаружения текущей позиции (широта/долгота) транспортного средства и выводит результат обнаружения на контроллер 110. Устройство 101 обнаружения позиции может включать в себя, по меньшей мере, одно из: гироскопического датчика, датчика скорости транспортного средства и камеры в качестве замены или в дополнение к GPS–приемнику. Таким образом, устройство 101 обнаружения позиции может обнаруживать текущую позицию рассматриваемого транспортного средства на основе, по меньшей мере, одного из результата обнаружения угловой скорости транспортного средства посредством гироскопического датчика, результата обнаружения скорости транспортного средства, полученного посредством датчика скорости транспортного средства, и информации о полосе движения, извлеченной из изображения, запечатленного посредством камеры, в качестве замены или в дополнение к обнаружению текущей позиции транспортного средства, используя GPS. Когда устройство 101 обнаружения позиции включает в себя, по меньшей мере, одно из гироскопического датчика, датчика скорости транспортного средства и камеры в дополнение к GPS–приемнику, устройство 101 обнаружения позиции может выполнить оценку собственной позиции посредством измерения одометрии или другой подходящей методики.
[0014]
Блок 102 картографической информации включает в себя базу данных, которая предварительно сохраняет картографические данные. Картографические данные являются так называемой электронной картой и представляют информацию, в которой широта и долгота ассоциированы с картографической информацией. Картографические данные соответствуют вышеописанной карте высокого разрешения, которая включает в себя информацию о границе полосы движения, ассоциированную с каждой точкой, и информацию о местоположении целевых объектов. Примеры информации о границе полосы движения включают в себя примеры, в которых кривые и прямые линии границ полос движения представлены посредством дискретных точечных последовательностей, а также примеры, в которых кривые и прямые линии границ полос движения представлены посредством математических формул, таких как кривые Базового Сплайна (B–Spline) и неоднородные кривые рационального Базового Сплайна (NURBS). Кривая B–Spline представляет собой гладкую кривую, заданную множеством контрольных точек, а кривая NURBS представляет собой гладкую кривую, заданную множеством контрольных точек и вектором узлов.
[0015]
Блок 103 датчика включает в себя устройство 1031 формирования изображения, такое как широкоугольная камера, и устройство 1032 определения дальности, такое как лазерный дальномер (LRF), или другие подобные устройства. Устройство 1031 формирования изображения и устройство 1032 определения дальности каждое предоставляется на капоте, бампере, номерном знаке, фарах, боковом зеркале или на их периферии. Устройство 1031 формирования изображения захватывает изображения вокруг транспортного средства. Устройство 1032 определения дальности испускает электромагнитные волны в окружающую среду рассматриваемого транспортного средства и обнаруживает отраженные волны. Информация формирования изображения, полученная посредством устройства 1031 формирования изображения, и информация определения дальности, полученная посредством устройства 1032 определения дальности, выводятся в контроллер 110. Контроллер 110 имеет функцию обнаружения позиции целевого объекта и обнаруживает относительные позиции целевых объектов (включая признаки, которые будут описаны ниже), существующие вокруг рассматриваемого транспортного средства по отношению к рассматриваемому транспортному средству, на основе информации формирования изображения, выведенной из устройства 1031 формирования изображения, и информации определения дальности, выведенной из устройства 1032 определения дальности. Примеры целевых объектов включают в себя линии (такие как метки полос движения) на поверхности дорожного полотна, по которой передвигается транспортное средство, бордюрные камни и ограждения на обочине дороги, сигналы регулирования движением и дорожные знаки. Здесь функция обнаружения позиции целевого объекта контроллера 110 служит для обнаружения относительных позиций всех целевых объектов, которые обнаруживаются посредством устройства 1031 формирования изображения и устройства 1032 определения дальности, по отношению к рассматриваемому транспортному средству. Когда может быть определено, что целевые объекты, обнаруженные посредством устройства 1031 формирования изображения, являются теми же, что и целевые объекты, обнаруженные посредством устройства 1032 определения дальности, функция обнаружения позиции целевого объекта контроллера 110 может служить для обнаружения только целевых объектов, обнаруженных посредством любого из устройства 1031 формирования изображения и устройства 1032 определения дальности.
[0016]
Запоминающее устройство 104 включает в себя одно или несколько запоминающих устройств с произвольным доступом (ОЗУ), которые служат в качестве доступного запоминающего устройства. Контроллер 110 имеет функцию захвата позиции рассматриваемого транспортного средства и захватывает информацию о текущей позиции рассматриваемого транспортного средства от устройства 101 обнаружения позиции. Контроллер 110 дополнительно имеет функцию сохранения траектории передвижения и размещает позиции вывода рассматриваемого транспортного средства из устройства 101 обнаружения позиции, во временные ряды каждое предварительно определенное время и сохраняет их в запоминающем устройстве 104 в качестве траектории передвижения рассматриваемого транспортного средства. Например, рассматриваемое транспортное средство вынуждают перемещаться дважды или более по одной и той же полосе движения, чтобы получить множество траекторий передвижения, из которых вычисляется среднее значение и сохраняется в качестве траектории передвижения рассматриваемого транспортного средства в запоминающем устройстве 104.
[0017]
Здесь функция сохранения траектории передвижения контроллера 110 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения служит для сохранения в запоминающем устройстве 104 траектории передвижения рассматриваемого транспортного средства и информации в отношении относительных позиций целевых объектов (в частности, граничных линий полосы движения), которые обнаруживаются с использованием функции обнаружения позиции целевого объекта относительно рассматриваемого транспортного средства, так что траектория передвижения и информация в отношении относительных позиций ассоциированы друг с другом. В одном или нескольких вариантах осуществления настоящего изобретения граничные линии полосы движения, сохраненные в запоминающем устройстве 104 в ассоциации с траекторией движения рассматриваемого транспортного средства, соответствуют истинным граничным линиям полосы движения, которые будут описаны ниже.
[0018]
ФИГ. 3 является диаграммой, иллюстрирующей пример траектории передвижения рассматриваемого транспортного средства и граничных линий полосы движения, сохраненных в запоминающем устройстве 104. Как показано на этой фигуре, запоминающее устройство 104 создано с возможностью сохранять последовательность точек, в которой позиции рассматриваемого транспортного средства (обозначены черными кружками) расположены во временных рядах, последовательность точек, в которой точки на левой границе полосы движения полосы движения(обозначены белыми кружками) расположены во временных рядах, и последовательность точек, в которой точки на правой границе полосы движения полосы движения (обозначены белыми кружками), расположены во временных рядах. Как указано в таблице на Фиг. 3, траектория передвижения рассматриваемого транспортного средства получается посредством размещения трехмерных координат (GPS–координат) рассматриваемого транспортного средства во временных рядах, и каждая граничная линия полосы движения получается посредством расположения координат границы полосы движения (координат, полученных путем преобразования относительных координаты в отношении рассматриваемого транспортного средства в GPS–координаты) во временных рядах.
[0019]
Как показано на фиг. 1, контроллер 110 имеет функцию коррекции картографических данных. Функция коррекции картографических данных служит для коррекции картографических данных таким образом, чтобы уменьшать ошибки между позициями и направлениями полос движения, включенными в картографические данные, которые предварительно сохраняются в блоке 102 картографической информации, и позициями и направлениями полос движения, сохраненными в запоминающем устройстве 104.
[0020]
В одном или нескольких вариантах осуществления настоящего изобретения, когда помощь при вождении или автономное вождение не исполняется (этот режим в дальнейшем будет называться «автономным режимом»), рассматриваемое транспортное средство принуждается к передвижению дважды или более в одной и той же области для захвата траекторий передвижения рассматриваемого транспортного средства и граничных линий полосы движения, ассоциированных с траекториями передвижения, и они сохраняются в запоминающем устройстве 104. Затем траектории передвижения рассматриваемого транспортного средства и граничные линии полосы движения, ассоциированные с траекториями передвижения, которые получены в автономном режиме и сохранены в запоминающем устройстве 104, используются в качестве истинных значений. Вместо траекторий передвижения рассматриваемого транспортного средства и граничных линий полосы движения, ассоциированных с траекториями передвижения, в качестве истинных значений могут использоваться граничные линии полосы движения, включенные в изображение карты, такой как аэрофотоснимок или спутниковое изображение.
[0021]
Здесь, когда фактические позиции и направления полос движения сравниваются с позициями и направлениями полос движения, включенными в картографические данные, обычно возникают ошибки между фактическими позициями и направлениями и позициями и направлениями на картографических данных. Ошибки включают в себя равномерные ошибки, при которых фактические позиции и позиции на картографических данных равномерно смещаются друг от друга в целом, и ошибки, в которых разницы между фактическими позициями и направлениями и позициями и направлениями на картографических данных постепенно увеличиваются от опорной точки (ошибки в последнем случае далее будут называться «искаженными ошибками»). Соответственно, функция коррекции картографических данных контроллера 110 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения служит для: обнаружения равномерных ошибок между фактическими позициями полос движения и позициями полос движения, включенными в картографические данные, и искаженными ошибками между фактическими позициями и направлениями полос движения и позициями и направлениями полос движения, включенными в картографические данные; равномерного смещения картографических данных, чтобы тем самым уменьшить равномерные ошибки; и постепенной коррекции картографических данных из опорной точки, тем самым уменьшая искаженные ошибки.
[0022]
Функция коррекции картографических данных контроллера 110 включает в себя функцию разделения элементов коррекции, функцию равномерного смещения и функцию коррекции искажений. Функция разделения элементов коррекции включает в себя функцию определения равномерной ошибки и функцию определения искаженной ошибки. Функция определения равномерной ошибки служит для обнаружения вышеописанных равномерных ошибок. С другой стороны, функция определения искаженной ошибки служит для обнаружения вышеописанных искаженных ошибок. Функция определения равномерной ошибки служит в первую очередь для выполнения совмещения между граничными линиями полосы движения, сохраненными в запоминающем устройстве 104, и картографическими данными, предварительно сохраненными в блоке 102 картографической информации.
[0023]
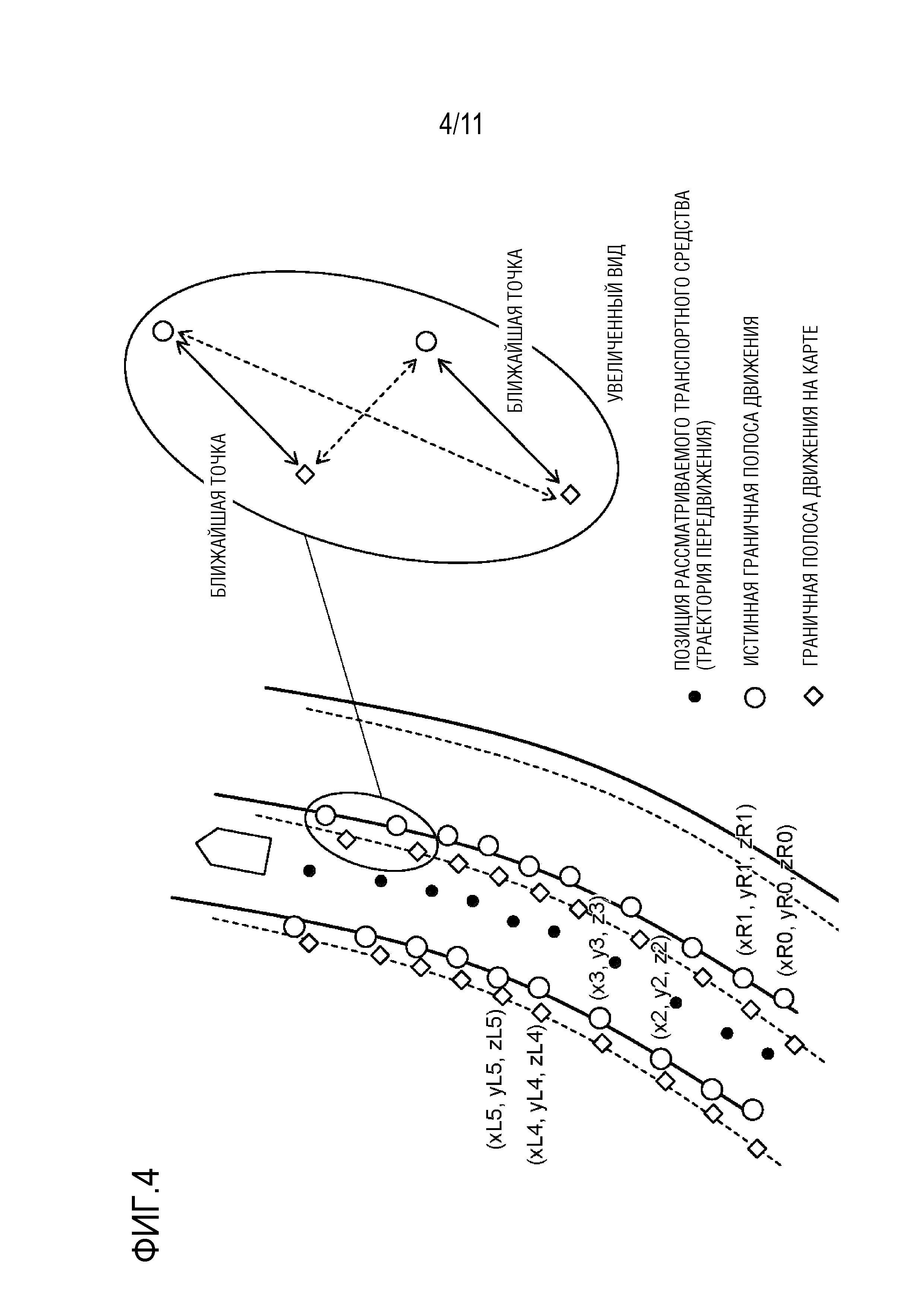
ФИГ.4 является диаграммой, иллюстрирующей состояние, в котором граничные линии полосы движения, сохраненные в запоминающем устройстве 104, и картографические данные, предварительно сохраненные в блоке 102 картографической информации, совмещены. Как проиллюстрировано на этой фигуре, граничные линии полосы движения, сохраненные в запоминающем устройстве 104, и граничные линии полосы движения, включенные в картографические данные, представляют собой информацию, составленную из соответствующих множеств дискретных точек, и поэтому обе могут быть совмещены друг с другом с использованием итеративного алгоритма ближайших точек (ICP). На фиг. 4 черные кружки обозначают позиции транспортного средства, белые кружки указывают точки, которые составляют истинные граничные линии (точки на истинных границах полосы движения), а белые ромбовидные формы указывают точки, которые составляют граничные линии на карте (точки на границе полосы движения на карте).
[0024]
Функция определения равномерной ошибки служит в первую очередь для обнаружения равномерной ошибки между граничной линией полосы движения, сохраненной в запоминающем устройстве 104 (далее именуемой «истинной граничной линией полосы движения»), и граничной линией полосы движения, включенной в картографические данные (обозначенные далее как «граничная линия полосы движения на карте»). На этапе обнаружения равномерной ошибки функция определения равномерной ошибки служит для поиска точек на граничной линии полосы движения на карте, которые расположены ближе всего к соответствующим точкам, составляющим соответствующую истинную граничную линию полосы движения (см. Увеличенный вид на фиг. 4). Затем функция определения равномерной ошибки служит для вычисления относительных расстояний между точками, составляющими истинную граничную линию полосы движения, и соответствующими точками на граничной линии полосы движения на карте.
[0025]
На этапе обнаружения равномерной ошибки функция определения равномерной ошибки затем служит для вычисления ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте. Примеры способа для вычисления ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте включают в себя следующий первый способ и второй способ.
[0026]
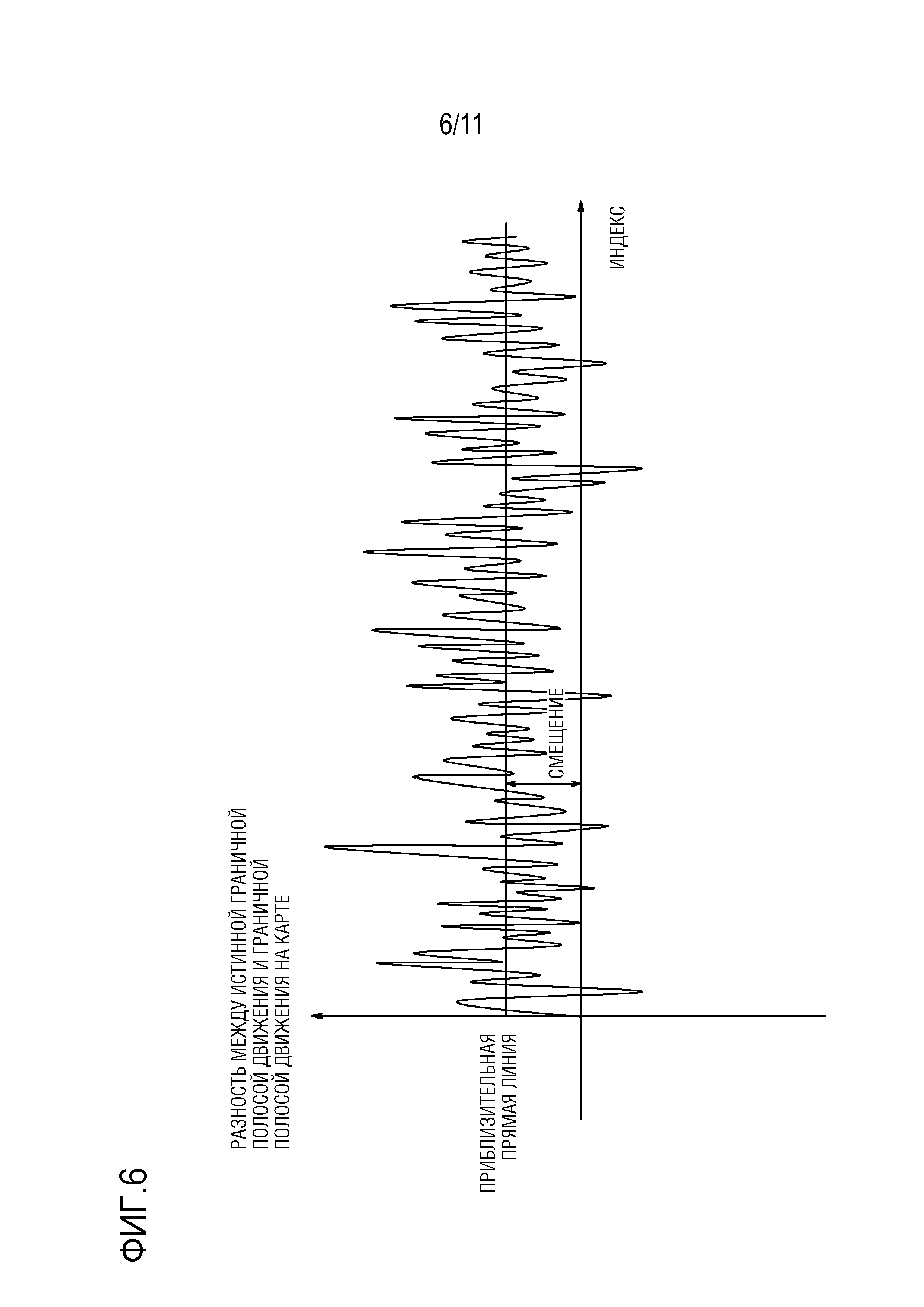
ФИГ. 5 и Фиг. 6 каждая является диаграммой для описания первого способа вычисления ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте. Как проиллюстрировано на этих фигурах, в первом способе индекс каждой точки на граничной линии полосы движения и индекс каждой соответствующей точки на граничной линии полосы движения на карте, ближайшей к точке на граничной линии полосы движения, представлены посредством горизонтальной оси, относительное расстояние между каждой точкой на граничной линии полосы движения и каждой соответствующей точкой на граничной линии полосы движения на карте, ближайшей к точке на граничной линии полосы движения, представлено посредством вертикальной оси, и такие относительные расстояния наносятся на график. Затем с помощью метода наименьших квадратов получается приблизительная кривая или приблизительная прямая линия, которая строится по точкам (подбирается по) облака нанесенных точек. После этого получают величину смещения приблизительной кривой или приблизительной прямой линии относительно горизонтальной оси (прямой линии с относительным расстоянием, равным нулю). Как проиллюстрировано на фиг. 5, когда получена приблизительная кривая, минимальное значение величины смещения приблизительной кривой относительно горизонтальной оси сравнивается с опорным значением. Когда минимальное значение величины смещения приблизительной кривой относительно горизонтальной оси больше опорного значения, существует равномерная ошибка между истинной граничной линией полосы движения и граничной линией полосы движения на карте и Абсолютная величина равномерной ошибки используется в качестве минимального значения величины смещения приблизительной кривой относительно горизонтальной оси. С другой стороны, как проиллюстрировано на фиг. 6, когда получена приблизительная прямая линия, величина смещения приблизительной прямой относительно горизонтальной оси является равномерной. Эта равномерная величина смещения сравнивается с опорным значением, и когда эта равномерная величина смещения больше, чем опорное значение, равномерная ошибка существует между истинной граничной полосой линией и граничной полосой линией на карте, и величина равномерной ошибки используется в качестве величины смещения приблизительной прямой относительно горизонтальной оси.
[0027]
Второй способ вычисления ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте - это способ, использующий разложение в ряд Фурье. Во втором способе, как и в первом способе, индекс каждой точки на граничной линии полосы движения и индекс каждой соответствующей точки граничной линии полосы движения на карте, ближайшей к точке на граничной линии полосы движения, представлены посредством горизонтальной оси, относительное расстояние между каждой точкой на граничной линии полосы движения и каждой соответствующей точкой на граничной линии полосы движения на карте, ближайшей к точке на граничной линии полосы движения, представлено посредством вертикальной оси, и такие относительные расстояния наносятся на график. Затем, когда разложение в ряд Фурье можно применить к облаку нанесенных точек, разложение в ряд Фурье используется для определения того, существует ли равномерная ошибка между истинной граничной линией полосы движения и граничной линией полосы движения на карте.
[0028]
Когда облако нанесенных точек представлено посредством f (t), следующие уравнения (1) – (3) получаются в результате разложения в ряд Фурье.
[Уравнение 1]
…(1)
[Уравнение 2]
…(2)
[Уравнение 3]
…(3)
[0029]
Постоянная составляющая (= а0/2), включенная в приведенное выше уравнение (1) в качестве результата разложения в ряд Фурье, сравнивается с опорным значением, и когда постоянная составляющая больше, чем опорное значение, равномерная ошибка существует между истинной граничной линией полосы движения и граничной линией полосы движения на карте, и абсолютная величина равномерной ошибки представлена посредством постоянной составляющей.
[0030]
Выше приведены способы вычисления равномерной ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте, когда граничная линия полосы движения сохраняется в запоминающем устройстве 104. С другой стороны, когда граничная линия полосы движения не сохраняется в запоминающем устройстве 104, и только позиции (траектория передвижения) рассматриваемого транспортного средства сохраняются в запоминающем устройстве 104, следующий способ может быть приведен в качестве примера, как способ для вычисления равномерной ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте. Примеры случая, в котором граничная линия полосы движения не сохраняется в запоминающем устройстве 104, включают в себя случай, в котором на дороге отсутствуют граничные линии полосы движения, и случай, когда блок 103 датчика не может обнаружить граничную линию полосы движения.
[0031]
Этот способ включает в себя, прежде всего, подтверждение того, что траектория передвижения рассматриваемого транспортного средства, сохраненная в запоминающем устройстве 104, существует внутри полосы движения на карте. В этом процессе подтверждения задается полоса движения на карте, которой принадлежит одна из множества точек, составляющих траекторию передвижения рассматриваемого транспортного средства. Здесь картографические данные обычно имеют структуру, в которой информация уровня дороги, информация уровня полосы движения и другая информация наслаиваются. Таким образом, информация уровня дороги на картографических данных включает в себя информацию в отношении граничных линий полосы движения и центральных линий полосы движения, которые составляют полосы движения, и/или информацию о признаках (таких как дорожные знаки, линии остановки и пешеходные переходы), ассоциированных с полосами движения. Соответственно, если задана полоса движения, на которой находится одна из множества точек, составляющих траекторию передвижения рассматриваемого транспортного средства, то могут быть указаны граничные линии полосы движения в отношении правой и левой сторон полосы движения. Затем величина смещения между центральной линией полосы движения, которая одинаково удалена от заданных граничных линий полосы движения в отношении правой и левой сторон, и траектория передвижения рассматриваемого транспортного средства рассчитываются посредством способа наименьших квадратов или разложения в ряд Фурье, и вычисленная величина смещения сравнивается с опорным значением. Когда величина смещения больше опорного значения, равномерная ошибка существует между истинной полосой движения и полосой движения на карте, и величина равномерной ошибки используется в качестве минимального значения величины смещения между центральной линией полосы движения и траекторией передвижения рассматриваемого транспортного средства. В альтернативном варианте осуществления после задания полосы движения, в которой расположена любая из множества точек, составляющих траекторию передвижения рассматриваемого транспортного средства, центральная линия полосы движения может быть задана вместо задания граничных линий полосы движения в отношении правой и левой стороны полосы движения. В таком случае величина смещения между заданной центральной линией полосы движения и траекторией передвижения рассматриваемого транспортного средства вычисляется посредством метода наименьших квадратов или разложения в ряд Фурье, и вычисленная величина смещения сравнивается с опорным значением. Когда величина смещения больше опорного значения, существует равномерная ошибка между истинной полосой движения и полосой движения на карте, и абсолютная величина равномерной ошибки используется в качестве минимального значения величины смещения между центральной линией полосы движения и траекторией передвижения рассматриваемого транспортного средства.
[0032]
ФИГ. 7 является диаграммой для описания фрагментов карты. Как проиллюстрировано на этой фигуре, картографические данные в соответствии с одним или несколькими вариантами осуществления настоящего изобретения разделены на фрагменты. Здесь картографические данные содержат ошибки в абсолютных координатах и ошибки в относительных координатах. В общем, ошибки в абсолютных координатах, как правило, больше, чем ошибки в относительных координатах. По существу, при равномерном смещении картографических данных, которое будет описано ниже, предпочтительнее равномерно смещать ограниченный диапазон на картографических данных, чем не равномерно смещать картографические данные в целом. С этой точки зрения ошибка между картографическими данными и фактической окружающей средой может быть уменьшена посредством ограничения диапазона для равномерного смещения картографических данных в терминах фрагментов. С этой целью в одном или нескольких вариантах осуществления настоящего изобретения Функция определения равномерной ошибки служит в первую очередь для вычисления равномерной ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте в виде фрагментов. Однако необязательно вычислять равномерную ошибку между истинной граничной линией полосы движения и граничной линией полосы движения на карте, чтобы равномерно сместить картографические данные в виде фрагментов. Например, когда картографические данные абсолютной системы координат, основанные на широте/долготе, преобразуются в картографические данные ортогональной системы координат для каждой области, равномерная ошибка между истинной граничной линией полосы движения и граничной линией полосы движения на карте может быть вычислена, чтобы равномерно сместить картографические данные для каждой области, для которой выполняется операция преобразования.
[0033]
После того, как равномерная ошибка между истинной граничной линией полосы движения и граничной линией полосы движения на карте обнаружена с использованием функции определения равномерной ошибки, функция равномерного смещения служит для определения величины равномерного смещения для равномерного смещения картографических данных в целом. Когда равномерная ошибка вычисляется вышеописанным первым способом, функция равномерного смещения служит для определения минимального значения величины смещения приблизительной кривой относительно горизонтальной оси в качестве величины равномерного смещения. С другой стороны, когда равномерная ошибка вычисляется вышеописанным вторым способом, функция равномерного смещения служит для определения постоянной составляющей в качестве величины равномерного смещения. Здесь функция равномерного смещения служит для определения величины равномерного смещения для каждой из позиций в направлении оси x, направлении оси y и направлении оси z, а также угла поворота вокруг оси z.
[0034]
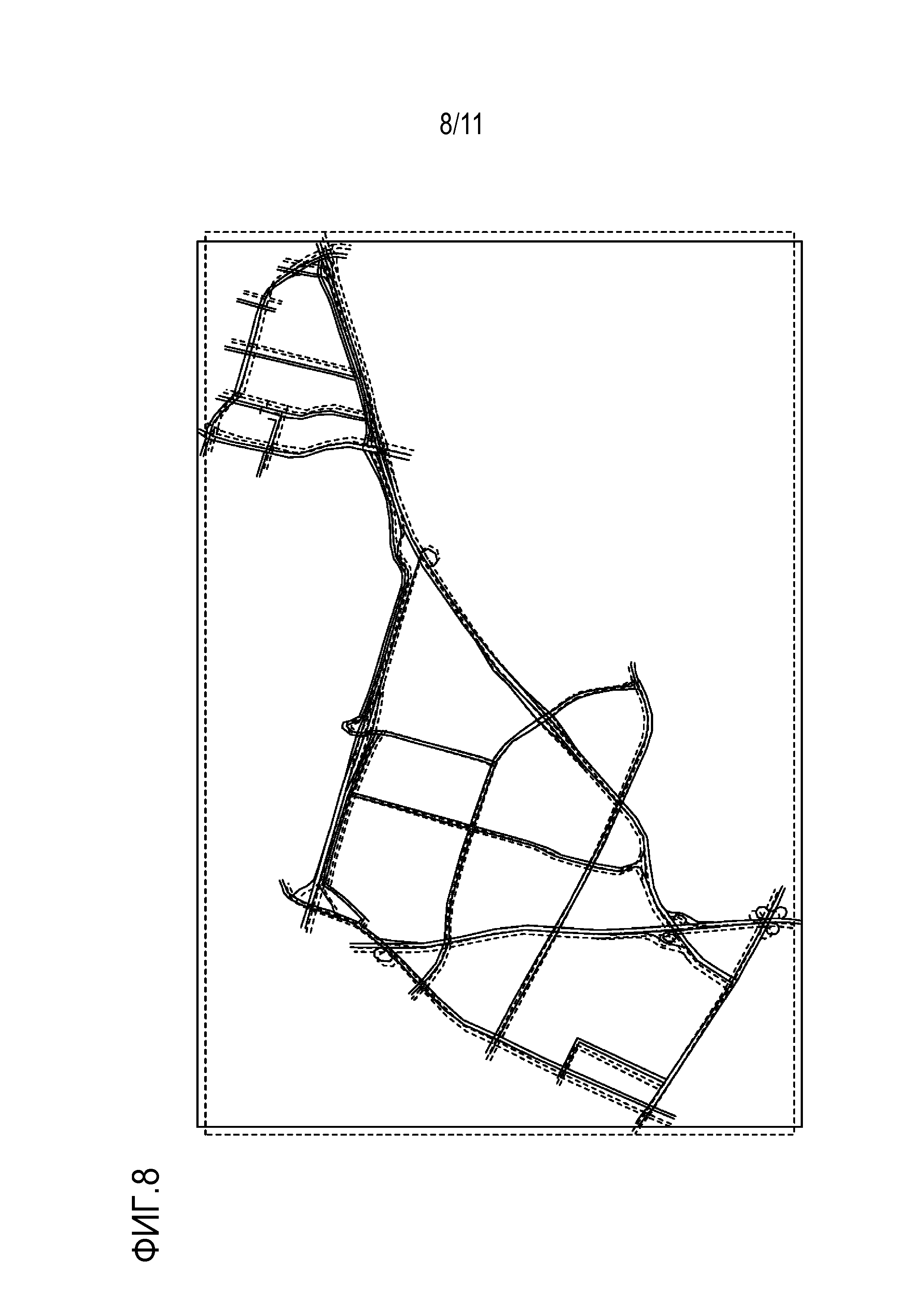
ФИГ.8 является диаграммой, иллюстрирующей состояние, в котором картографические данные смещаются равномерно. Как проиллюстрировано на фигуре, функция равномерного смещения служит для смещения картографических данных в направлении оси x, в направлении оси y и в направлении оси z и поворота картографических данных вокруг оси z на величину, соответствующую определенной величины равномерного смещения. Здесь, как проиллюстрировано на фигуре, даже после равномерного смещения картографических данных остаются ошибки между истинными полосами движения и полосами движения на карте. То есть ошибки между истинными полосами движения и полосами движения на карте связаны с ошибками, которые нельзя устранить просто посредством равномерного смещения картографических данных. В этом контексте устройство 100 коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения работает для равномерного смещения картографических данных, после чего вычисляет ошибки (вышеописанные искаженные ошибки), остающиеся на этом этапе между истинными граничными линиями полосы движения и граничной линии полосы движения на карте и корректирует картографические данные, чтобы вычисленные искаженные ошибки были уменьшены.
[0035]
Когда функция определения равномерной ошибки служит для вычисления равномерной ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте посредством вышеописанного первого способа, функция определения искаженной ошибки контроллера 110 служит для вычитания величины смещения приблизительной кривой или приблизительной прямой линии относительно горизонтальной оси от относительного расстояния между каждой точкой на истинной граничной линии полосы движения и каждой соответствующей точкой на граничной линии полосы движения на карте, ближайшей к точке на граничной линии полосы движения. Если полученное значение больше, чем опорное значение, то функция определения искаженной ошибки служит для определения того, что картографические данные содержат искаженную ошибку. Здесь, когда приблизительная прямая линия, подходящая к облаку нанесенных точек для относительного расстояния, может быть получена с использованием метода наименьших квадратов, делается определение, что не существует искаженной ошибки. С другой стороны, когда приблизительная кривая, подходящая к облаку нанесенных точек для относительного расстояния, может быть получена с использованием метода наименьших квадратов, делается определение, что существует искаженная ошибка. Величина искаженной ошибки относится к относительному расстоянию между каждой точкой на граничной линии полосы движения и каждой соответствующей точкой на граничной линии полосы движения на карте, ближайшей к точке на граничной линии полосы движения. Здесь искаженные ошибки могут быть рассчитаны для всех точек, которые составляют граничную линию полосы движения на карте. В этом случае, однако, нагрузка на обработку увеличивается. Следовательно, в одном или нескольких вариантах осуществления настоящего изобретения искаженные ошибки вычисляются способом, поясненным в способе определения величины коррекции искаженной ошибки, который будет описан ниже. Когда функция определения равномерной ошибки служит для вычисления равномерной ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте посредством вышеописанного второго способа, функция определения искаженной ошибки контроллера 110 может служить для вычисления переменной составляющей, которая получается после выполнения разложения в ряд Фурье, в качестве искаженной ошибке.
[0036]
Функция коррекции искажений контроллера 110 служит для определения величины коррекции искаженной ошибки для уменьшения искаженных ошибок картографических данных. Здесь функция коррекции искажений служит для определения величины коррекции искаженной ошибки для каждой из позиций в направлении оси x, направлении оси y и направлении оси z и угла поворота вокруг оси z. Для точек, в которых чувствительность приемника GPS–приемника меньше предварительно определенного опорного значения из–за количества спутников GPS и режима позиционирования GPS или из–за ситуации пути передвижения, такого как туннель, эстакада или высокое здание, функция коррекции искажений не служит для коррекции искаженной ошибки. Кроме того, для точек, в которых угол скольжения транспортного средства не меньше, чем заданное опорное значение, когда угол скольжения транспортного средства обнаруживается с помощью устройства обнаружения состояния транспортного средства (не показано), таких как датчик гироскопа, датчик скорости транспортного средства или датчик угла поворота колеса и сохраняется в запоминающем устройстве 104 вместе с соответствующей точкой, функция коррекции искажений не служит для выполнения коррекции искаженной ошибки. Здесь функция коррекции искажений предпочтительно служит для определения величины коррекции искаженной ошибки на основе информации об искажении из–за формы земли.
[0037]
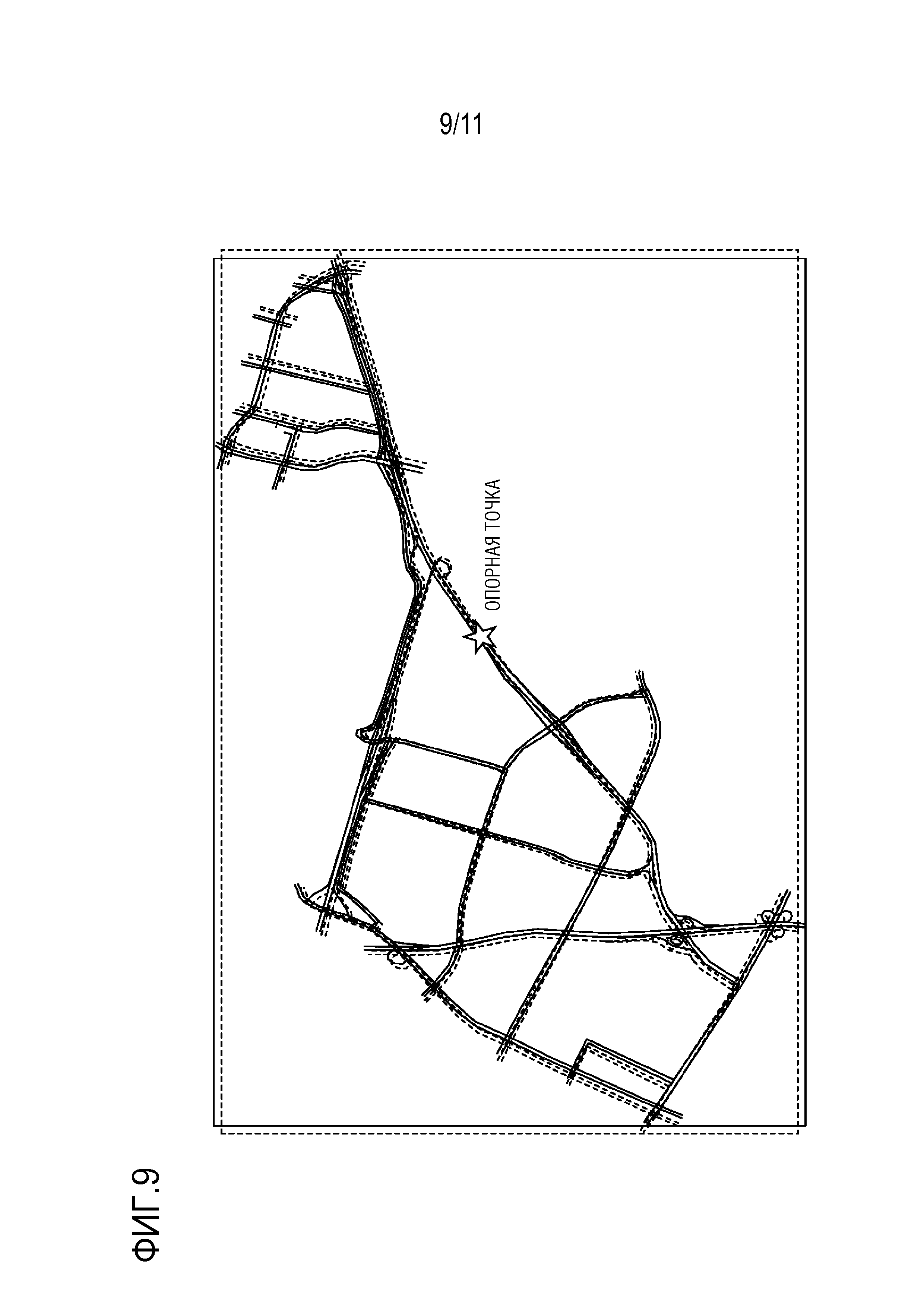
ФИГ. 9 является диаграммой для описания первого способа определения величины коррекции искаженной ошибки. При создании картографических данных с некоторой точкой на карте в качестве опорной точки предполагается, что искаженная ошибка, включенная в созданные картографические данные, постепенно увеличивается от опорной точки к конечной точке. Поэтому искажение картографических данных может быть выражено математической функцией, которая линейно возрастает относительно некоторой точки в качестве опорной точки. Например, сначала относительное расстояние вычисляется между каждой точкой на истинной граничной линии полосы движения и каждой соответствующей точкой на граничной линии полосы движения на карте, ближайшей к этой точке на истинной граничной линии полосы движения. Затем из наборов точек на истинной граничной линии полосы движения и соответственных соответствующих точек на граничной линии полосы движения на карте, ближайшим к точкам на истинной граничной линии полосы движения, осуществляется поиск набора точек, имеющих минимальное относительное расстояние. Затем в наборах точек на истинной граничной линии полосы движения и соответственных соответствующих точек на граничной линии полосы движения на карте, ближайшим к точкам истинной граничной линии полосы движения, точка на граничной линии полосы движения на карте, к которой принадлежит набор точек, имеющих минимальное относительное расстояние, устанавливается в качестве опорной точки. Затем, величина коррекции искаженной ошибки в каждой точке определяется как значение, полученное посредством умножения расстояния от опорной точки на константу.
[0038]
Вторым способом определения величины коррекции искаженной ошибки является способ определения величины коррекции искаженной ошибки со ссылкой на конкретную точку, такую как точка, в которой существует признак. Признаки, такие как сигналы регулирования движением и знаки, являются признаками, на которые ссылаются при создании картографических данных. Соответственно, фактические позиции признаков, таких как сигналы регулирования движением и знаки, распознаваемые посредством блока 103 датчика, оборудованным в соответствующем транспортном средстве, сравниваются с позициями признаков, таких как сигналы регулирования движением и знаки, включенные в картографические данные, и возникающие ошибки могут быть определены как величина исправлений искаженных ошибок.
[0039]
ФИГ. 10 является диаграммой, иллюстрирующей состояние, в котором равномерное смещение картографических данных корректируется на основе величины коррекции искаженной ошибки. Как проиллюстрировано на этой фигуре, функция коррекции искажений контроллера 110 служит для смещения каждой точки картографических данных, которая была равномерно смещена с использованием функции равномерного смещения, в направлении оси x, направлении оси y и направление оси z, и поворота картографических данных вокруг оси z на величину, соответствующую определенной величине коррекции искаженной ошибки.
[0040]
ФИГ.11 является последовательностью операций процесса коррекции картографических данных, исполняемого посредством устройства 100 коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Во–первых, рассматриваемое транспортное средство принуждается к перемещению дважды или более в одной и той же области (например, блок фрагмента) во время автономного режима. В этой операции функция захвата позиции рассматриваемого транспортного средства контроллера 110 служит для захвата информации в отношении текущей позиции рассматриваемого транспортного средства от устройства 101 обнаружения позиции (этап S101), а функция обнаружения позиции целевого объекта контроллера 110 служит для приема информации в отношении позиций целевых объектов, включая граничные линии полосы движения, от блока 103 датчика (этап S102).
[0041]
Затем, на этапе S103 функция сохранения траектории передвижения контроллера 110 служит для размещения позиций рассматриваемого транспортного средства во временных рядах каждое предварительно определенное время и сохраняет их в запоминающем устройстве 104 в качестве траектории передвижения рассматриваемого транспортного средства. На этом этапе функция сохранения траектории передвижения контроллера 110 служит для сохранения в запоминающем устройстве 104 траектории передвижения рассматриваемого транспортного средства и информации в отношении относительных позиций целевых объектов, включая граничные линии полосы движения для рассматриваемого транспортного средства, так что траектория передвижения и информация в отношении относительных позиций ассоциированы друг с другом.
[0042]
Затем, на этапе S104 функция разделения элементов коррекции контроллера 110 служит для определения того, сохранены или нет в запоминающем устройстве 104 траектория передвижения рассматриваемого транспортного средства и граничные линии полосы движения, обнаруженные с использованием функции обнаружения позиции целевого объекта таким образом, чтобы быть ассоциированными друг с другом. За положительным определением на этом этапе следует этап S105, тогда как за отрицательным определением на этом этапе следует этап S107.
[0043]
На этапе S105 Функция разделения элементов коррекции контроллера 110 служит для сравнения истинной граничной линии полосы движения, сохраненной в запоминающем устройстве 104, с граничной линией полосы движения на карте, предварительно сохраненной в блоке 102 картографической информации. Затем, на этапе S106 функция разделения элементов коррекции контроллера 110 служит для вычисления ошибки между истинной граничной линией полосы движения и граничной линией полосы движения на карте. За этапом S106 следует этап S109.
[0044]
С другой стороны, на этапе S107 функция разделения элементов коррекции контроллера 110 служит для подтверждения того, что траектория передвижения рассматриваемого транспортного средства включена в полосу движения на карте. Затем, на этапе S108 функция разделения элементов коррекции контроллера 110 служит для вычисления ошибки между траекторией передвижения рассматриваемого транспортного средства и центральной линией полосы движения. За этапом S108 следует этап S109.
[0045]
На этапе S109 функция определения равномерной ошибки контроллера 110 служит для определения того, включена ли равномерная ошибка, равная или большая, чем опорное значение, между истинной полосой движения и полосой движения на карте или между траекторией передвижения рассматриваемого транспортного средства и центральной линией полосы движения. За положительным определением на этом этапе следует этап S110, тогда как за отрицательным определением на этом этапе следует этап S111.
[0046]
На этапе S110 функция равномерного смещения контроллера 110 служит для определения равномерной величины смещения для равномерного смещения картографических данных в целом. Затем, на этапе S111 функция равномерного смещения контроллера 110 служит для установки диапазона для коррекции картографических данных в виде фрагментов. Затем на этапе S112 функция равномерного смещения контроллера 110 служит для равномерного смещения, в виде фрагментов, картографических данных в направлении оси x, направлении оси y и направлении оси z и поворота картографических данных вокруг оси z на величину, соответствующую определенной величине равномерного смещения.
[0047]
Затем на этапе S113 функция определения искаженной ошибки контроллера 110 служит для вычисления искаженной ошибки картографических данных, описанных выше первым способом или вторым способом, а функция коррекции искажений контроллера 110 служит для определения коррекции величины искаженной ошибки для каждой из позиций в направлении оси x, направлении оси y, направлении оси z и угла поворота вокруг оси z. Затем на этапе S114 функция коррекции искажений контроллера 110 служит для смещения каждой точки картографических данных, которая была равномерно смещена с использованием функции равномерного смещения, в направлении оси x, направлении оси y и направлении оси z и поворота картографических данных вокруг оси z на величину, соответствующую определенной величине коррекции искаженной ошибки.
[0048]
Как описано выше, в способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения процесс коррекции, обеспечивающий равномерное смещение картографических данных в целом, чтобы таким образом уменьшить общую ошибку позиции картографических данных (т.е. равномерная ошибка) и процесс исправления для уменьшения искаженной ошибки, которая является ошибкой позиции, все еще сохраняющейся на картографических данных, даже после равномерного смещения картографических данных в целом, исполняется отдельно. Это может уменьшить степень отклонения между фактической полосой движения и полосой движения на картографических данных, и, следовательно, позиция рассматриваемого транспортного средства может быть точно определена относительно полосы движения на картографических данных.
[0049]
В способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения опорная информация, которая включает в себя, по меньшей мере, одну из траектории передвижения транспортного средства, граничную линию полосы движения и изображения карты (такого как аэрофотоснимок) или спутниковое изображение) сравнивается с картографическими данными, чтобы таким образом вычислить равномерную ошибку и искаженную ошибку картографических данных. Например, как описано выше, равномерная ошибка и искаженная ошибка картографических данных вычисляются посредством получения траектории передвижения транспортного средства и граничных линий полосы движения в автономном режиме, сохраняя их в запоминающем устройстве 104 так, чтобы они были ассоциированы с друг с другом, и сравнивают граничную линию полосы движения, сохраненную в запоминающем устройстве 104, с граничной линией полосы движения на картографических данных. Это позволяет определить степень отклонения между фактической полосой движения и полосой движения на картографических данных. Кроме того, путем сравнения граничной линии полосы движения аэрофотоснимка с граничной линией полосы движения на картографических данных, например, можно определить степень отклонения между фактической полосой движения и полосой движения на картографических данных, даже для точки, в которой чувствительность приемника GPS–приемника недостаточна.
[0050]
В способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения равномерная ошибка и искаженная ошибка картографических данных вычисляются на основе разницы между истинной границей полосы движения и границей полосы движения на картографических данных. Информация об истинной границе полосы движения получается посредством бортового блока 103 датчика, например, когда транспортное средство передвигается в автономном режиме. Это позволяет определить степень отклонения между фактической полосой движения и полосой движения на картографических данных.
[0051]
В способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения подгонка приблизительной кривой на основе метода наименьших квадратов выполняется для разницы между истинной границей полосы движения и границей полосы движения на картографических данных, равномерная ошибка картографических данных вычисляется на основе минимального значения разности полученной приблизительной кривой, а искаженная ошибка картографических данных вычисляется на основе значения отклонения полученной приблизительной кривой. Это позволяет с высокой степенью точности легко вычислять равномерную ошибку и искаженную ошибку картографических данных.
[0052]
В способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения разложение в ряд Фурье выполняется для разности между истинной границей полосы движения и границей полосы движения на картографических данных, при этом равномерная ошибка картографических данных вычисляется на основе постоянной составляющей, полученной в результате разложения в ряд Фурье, а искаженная ошибка картографических данных вычисляется на основе переменной составляющей, полученного в результате разложения в ряд Фурье. Это позволяет с высокой степенью точности легко вычислять равномерную ошибку и искаженную ошибку картографических данных.
[0053]
Здесь искажение картографических данных имеет тенденцию постепенно увеличиваться от вышеуказанной опорной точки к конечной точке картографических данных. Следовательно, в способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения точка на картографических данных, в которой разница между истинной границей полосы движения и границей полосы движения на картографических данных является минимальной, когда картографические данные в целом равномерно смещены устанавливаются в качестве опорной точки, и искажаются ошибка картографических данных вычисляется таким образом, чтобы искаженная ошибка возрастает постепенно от опорной точки в направлении конечной точки картографических данных. Дополнительно или альтернативно, в способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения искаженную ошибку картографических данных в каждой точке картографических данных вычисляют путем умножения относительного расстояния от вышеуказанной опорной точки к каждой точке картографических данных на константу. Дополнительно или альтернативно, в способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения искаженная ошибка в каждой точке картографических данных вычисляется с использованием функции, которая формулирует соотношение между относительным расстоянием от вышеуказанной опорной точки к каждой точке картографических данных и искаженную ошибку картографических данных. Это позволяет надлежащим образом рассчитать искаженную ошибку картографических данных в соответствии с точкой на картографических данных.
[0054]
В способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения информация о признаках, включающих в себя сигналы регулирования движением и знаки уличного движения и т. д., захватываются посредством бортового блока 103 датчика, когда транспортное средство перемещается в автономном режиме, например, и искаженная ошибка картографических данных вычисляется путем сравнения информации признаков с информацией признаков, включенных в картографические данные. Это позволяет с высокой степенью точности вычислять искаженную ошибку в непосредственной близости от перекрестка на картографических данных.
[0055]
В способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения для точки, в которой чувствительность приемника GPS–приемника меньше предварительно определенного опорного значения, процесс коррекции уменьшения искаженной ошибки картографических данных не выполняется. Посредством этой операции может быть предотвращен процесс исправления уменьшения искаженной ошибки картографических данных на основе информации о местоположении транспортного средства, которая ошибочно обнаружена.
[0056]
В способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения для точки, в которой угол скольжения транспортного средства не меньше, чем предварительно определенное опорное значение, процесс коррекции уменьшения искаженной ошибки картографических данных не выполняется. Посредством этой операции может быть предотвращен процесс исправления для уменьшения искаженной ошибки картографических данных на основе информации о местоположении транспортного средства, которая ошибочно обнаружена из–за влияния поведения транспортного средства.
[0057]
В способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения процесс коррекции уменьшения искаженной ошибки картографических данных включает в себя исполнение процесса коррекции позиции каждой точки картографических данных в направлении оси x, направлении оси y и направлении оси z, а также процесс вращения (поворота) картографических данных вокруг оси z. Это позволяет более точно выполнять коррекцию картографических данных.
[0058]
Здесь, как описано выше, картографические данные содержат ошибки в абсолютных координатах и ошибки в относительных координатах. В общем, ошибки в абсолютных координатах, как правило, больше, чем ошибки в относительных координатах. По существу, в процессе равномерного смещения картографических данных предпочтительно равномерно смещать ограниченный диапазон картографических данных, а не равномерно смещать картографические данные в целом. Следовательно, в способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения процесс коррекции уменьшения равномерной ошибки картографических данных включает в себя равномерное смещение картографических данных в целом в виде фрагментов, которые составляют картографические данные. Дополнительно или в качестве альтернативы, в способе и устройстве коррекции картографических данных в соответствии с одним или несколькими вариантами осуществления настоящего изобретения процесс коррекции уменьшения равномерной ошибки картографических данных включает в себя равномерное смещение картографических данных в целом в отношении областей, для которых операция преобразования выполняется, когда картографические данные абсолютной системы координат на основе широты/долготы преобразуются в картографические данные ортогональной системы координат для каждой из областей. Это может уменьшить степень отклонения между фактической полосой движения и полосой движения на картографических данных.
[0059]
Варианты осуществления, описанные выше, описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений в настоящем изобретении.
[Описание позиционных обозначений]
[0060]
100 Устройство коррекции картографических данных
104 Запоминающее устройство
110 контроллер
Реферат
Изобретение относится к обработке картографических данных. Технический результат заключается в уменьшении ошибок в картографических данных, что приводит к повышению точности определения позиции транспортного средства относительно полосы движения на картографических данных. Способ коррекции картографических данных включает в себя исполнение первого процесса коррекции равномерного смещения картографических данных в целом, чтобы уменьшить первую ошибку, которая является общей ошибкой позиции картографических данных, и исполнение второго процесса коррекции уменьшения второй ошибки, которая является ошибкой позиции, которая остается в картографических данных даже после равномерного смещения картографических данных в целом. 2 н. и 13 з.п. ф-лы, 11 ил.
Комментарии