Способ и система геолокации терминала, занимающего определенное географическое положение - RU2774300C2
Код документа: RU2774300C2
Чертежи






Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к области геолокации. В частности, изобретение относится к способу и системе геолокации терминала системы беспроводной связи. Изобретение с успехом применяется, в частности, к геолокации смарт-объектов типа "Интернета вещей" (Internet of Things, IoT).
Уровень техники
За последние несколько лет растущее использование систем беспроводной связи естественным образом привело к развитию услуг, основанных на географическом положении объекта и используемых, например, для оказания помощи при навигации, при управлении дорожным движением, контроле транспортирования товаров и, вообще, для дистанционного считывания информации и т.д.
Спутниковые системы позиционирования, такие как GPS ("Global Positioning System", система глобального позиционирования), являются некоторыми из самых известных технологий геолокации. Эти системы основаны на использовании терминалом приемника радиосигналов, передаваемых специально назначенными спутниками. Спутниковая геолокация является весьма точной, но страдает множеством недостатков, связанных, в частности, со стоимостью и потреблением электроэнергии при интегрировании в объект GPS-приемника, а также с отсутствием возможности работы в закрытых зонах.
Существуют и другие технологии геолокации терминала, основанные на обмене сигналами с базовыми станциями сети доступа, с которыми он соединен. В сотовых сетях, например, таких как GSM ((Global System for Mobile Communications, глобальная система для мобильной связи), как известно, оценивается положение терминала относительно положения базовой станции, с которой он в настоящий момент связан. Этот способ геолокации обладает, однако, посредственной точностью, поскольку зона покрытия базовой станции может достигать в радиусе нескольких километров или даже нескольких десятков километров.
Другие способы содержат оценку расстояний, отделяющих терминал от множества базовых станций, вычисляя времена прибытия, углы распространения или разности по частоте для сигналов, которыми обмениваются терминал и базовые станции. Все эти различные способы, однако, обладают тем недостатком, что требуют специального оборудования и программного обеспечения. Кроме того, они часто требуют дорогостоящей синхронизации различных базовых станций, действующих в качестве наблюдательных пунктов. Наконец, они особенно чувствительны к явлению, называемому многолучевым распространением (распространению одного и того же радиосигнала по множеству путей из-за явлений отражения, преломления и дифракции на встречающихся препятствиях).
Другие способы геолокации основаны на уровне принимаемой мощности (сокращенно RSSI, от "Received Signal Strength Indicator", индикатор мощности принимаемого сигнала) сигнала, которым обмениваются терминал и базовая станция. Эти способы особенно хорошо адаптируются к системам беспроводной связи типа сотовой связи (например, к таким как GSM), для которых информация RSSI доступна напрямую, так как она используется самой системой связи. Эти способы основаны на том факте, что радиосигнал затухает в атмосфере и, таким образом, уровень RSSI сигнала, принимаемого приемником, изменяется в соответствии с расстоянием, отделяющим приемник от источника сигнала. Таким образом, можно определить географическое положение терминала с помощью трилатерации, оценивая расстояние от терминала до различных базовых станций, которые его окружают, на основе уровней RSSI, измеряемых базовыми станциями. Недостатком такого способа геолокации посредством трилатерации, основанного на уровнях RSSI, является отсутствие точности вследствие того, что многочисленные параметры, влияющие на затухание сигнала (препятствия, радиопомехи, движение терминала и т.д.) делают функцию, определяющую расстояние на основе уровня RSSI, очень сложной.
Были, таким образом, разработаны новые способы геолокации, основанные на уровнях RSSI. Эти новые способы основаны на технологиях машинного обучения. Конкретно, сюда входит построение на стадии калибровки базы данных, которая связывается с известными географическими положениями, радиосигнатурой, соответствующей всем уровням RSSI, измеренным для терминала в рассматриваемом положении для набора базовых станций системы. Затем, на стадии поиска радиосигнал, наблюдаемый терминалом, расположенным в неизвестном положении, сравнивается со всеми сигнатурами базы данных, чтобы оценить положение терминала на основе положения(-ий), соответствующего наиболее схожей сигнатуре(-ам).
Такие способы, однако, обладают несколькими недостатками, в частности, в случае, когда географическая зона, которая должна быть покрыта, является очень обширной, например, если должна быть покрыта вся страна или даже континент. Первый недостаток связан с точностью геолокации. Действительно, случается, что две радиосигнатуры, соответствующие двум соседним географическим положениям, существенно отличаются, или две весьма похожие радиосигнатуры соответствуют двум географическим положениям, разделенным на местности. Установление взаимосвязи между радиосигнатурой и связанным с ней географическим положением, таким образом, становится трудным из-за шумов, создаваемых в таких ситуациях. Другой недостаток связан со сложностью используемого алгоритма машинного обучения. Действительно, для получения достаточной точности в базу данных, создаваемую на стадии калибровки, необходимо вставить большое количество элементов. Кроме того, если зона, которая должна быть покрыта, является обширной, необходимо учитывать большое количество базовых станций. Все это способствует значительному увеличению данных при вводе алгоритма машинного обучения и, таким образом, созданию ограничений по времени вычисления и мощности вычислительных средств. Чтобы выполнить стадию калибровки, как известно, нужно поместить на борту группы транспортных средств, движущихся через зону, которая должна быть покрыта, устройства, адаптированные для точного обеспечения определения географического положения и уровней RSSI для базовых станций системы связи в различных точках (английским термином для квалификации этой стадии является "war-driving", "вардрайвинг"). Чем больше число пунктов, тем лучше характеристики способа геолокации с точки зрения точности, но тем более длительной и более дорогостоящей является стадия калибровки.
Сущность изобретения
Задача настоящего изобретения состоит в преодолении всех или части недостатков предшествующего уровня техники, в частности тех, которые раскрыты выше.
С этой целью и в соответствии с первым подходом, представленное изобретение предлагает в системе беспроводной связи способ геолокации терминала, называемого "terminal of interest" (интересующий терминал). Способ содержит этапы, на которых:
- определяют на основе сообщений, передаваемых другими терминалами, называемыми "калибровочными терминалами" (calibration terminal), и принимаемых базовыми станциями упомянутой системы беспроводной связи, набор опорных элементов, причем каждый опорный элемент содержит радиосигнатуру, связанную с географическим положением калибровочного терминала в момент, когда передается сообщение, упомянутая радиосигнатура соответствует набору значений, представляющих качество линий беспроводной связи, существующих между упомянутым калибровочным терминалом и базовыми станциями,
- определяют на основе сообщения, передаваемого упомянутым интересующим терминалом, расположенным в географическом положении, которое должно быть оценено, радиосигнатуру упомянутого интересующего терминала,
- идентифицируют конкретные географические положения, называемые "интересующими точками" на основе географических положений опорных элементов из набора опорных элементов,
- модифицируют набор опорных элементов на основе идентифицированных интересующих точек,
- оценивают географическое положение упомянутого интересующего терминала на основе радиосигнатуры упомянутого интересующего терминала и модифицированного набора опорных элементов.
Оценка географического положения интересующего терминала выполняется, например, алгоритмом машинного обучения, целью которого является установление взаимосвязи между радиосигнатурой и географическим положением.
Интересующая точка соответствует предпочтительной точке передачи сообщений, в которой для терминалов рассматриваемой системы беспроводной связи, имеется, в среднем, больше сообщений, передаваемых от или вблизи интересующей точки, чем от другого географического положения.
Например, интересующая точка может соответствовать конкретному географическому положению, в котором вероятность присутствия терминала рассматриваемой системы больше, чем в другом месте. В частности, в случае транспортирования поддонов с товарами, оборудованных терминалами и движущихся со склада на склад с относительно коротким временем движения относительно времени пребывания на складе, упомянутые склады могут соответствовать интересующим точкам.
В соответствии с другим примером, интересующая точка может соответствовать точке сходимости терминалов системы. В частности, аэропорты могут соответствовать интересующим точкам для багажа, снабженного терминалами системы.
Интересующие точки могут идентифицироваться динамически на основе опорных элементов, снабженных калибровочными терминалами. В конкретных вариантах осуществления, по меньшей мере, часть интересующих точек также может быть известна заранее.
Модификация набора опорных элементов соответствует, например, стадии оптимизации, во время которой удаляются нежелательные несопоставимые опорные элементы (например, те, которые, согласно оценке, находятся вдалеке от интересующих точек) и/или на которой к соответствующим опорным элементам (например, тем, которые, как считается, близкими к интересующим точкам) добавляется дополнительная информация, чтобы очистить и/или обогатить набор опорных элементов. Такие меры позволяют получить выигрыш с точки зрения точности геолокации, поскольку эта стадия оптимизации усиливает взаимосвязь, существующую между радиосигнатурой и географическим положением, пользуясь преимуществом существования интересующих точек, в которых вероятность присутствия терминала больше, чем где-либо еще.
Кроме того, удаление несопоставимых элементов способствует сокращению количества опорных элементов, используемых алгоритмом обучения, и, таким образом, снижению его сложности, что преобразуется в улучшение с точки зрения времени вычисления и мощности вычислительных средств.
Наконец, эти меры могут позволить уменьшить размер радиосигнатуры, например, учитывая только базовые станции, которые располагаются около интересующих точек, что способствует еще большему снижению сложности алгоритма обучения.
В конкретных вариантах осуществления изобретение может дополнительно содержать один или более нижеследующих признаков, рассматриваемых отдельно или в соответствии со всеми технически возможными сочетаниями.
В конкретных вариантах осуществления географическое положение интересующего терминала оценивается в форме значения, представляющего вероятность расположения упомянутого интересующего терминала в идентифицированной интересующей точке.
Такие меры позволяют, например, сделать вывод, что интересующий терминал располагается в интересующей точке, для которой значение вероятности является наибольшим, если это значение больше определенного порога, или прийти к выводу, если это значение ниже упомянутого порога, что интересующий терминал не располагается вблизи какой-либо интересующей точки (находится, например, на переходе между двумя интересующими точками).
В конкретных вариантах осуществления идентификация интересующих точек содержит этапы, на которых:
- разделяют географическую зону, которая должна быть перекрыта, на множество ячеек, имеющих заданный размер,
- вычисляют для каждой ячейки значения, представляющие множество опорных элементов, располагающихся в упомянутой ячейке,
- если вычисленное значение удовлетворяет заданному критерию, то определяют интересующую точку, соответствующую упомянутой ячейке и/или географическим положениям опорных элементов, расположенных в упомянутой ячейке.
В конкретных вариантах осуществления идентификация интересующих точек содержит этап вычисления для каждого опорного элемента расстояния, отделяющего упомянутый опорный элемент и каждый другой опорный элемент друг от друга, а также последующие этапы, выполняемые периодически на временном наборе опорных элементов, первоначально соответствующем набору опорных элементов, пока не будет достигнуто условие остановки:
- для каждого опорного элемента временного набора опорных элементов вычисляют значение, представляющее множество опорных элементов, называемых "соседние элементы", расположенных на расстоянии, меньшем заданного порога,
- если наибольшее вычисленное значение для элемента, называемого "интересующий элемент", больше заданного порога:
- определяют интересующую точку согласно географическим положениям интересующего элемента и/или его соседних элементов,
- исключают элемент и его соседние элементы из временного набора опорных элементов.
В конкретных вариантах осуществления способ геолокации дополнительно содержит стадию фильтрации интересующих точек, идентифицированных согласно их географическому положению и/или значению, представляющему множество опорных элементов набора опорных элементов, расположенных на расстоянии, меньшем заданного порога.
В конкретных вариантах осуществления значение, представляющее множество опорных элементов, вычисляется в соответствии с весовым коэффициентом, назначаемым каждому опорному элементу и представляющим время, которое прошло между моментом передачи сообщения калибровочным терминалом и моментом, в который идентифицируются интересующие точки.
Такие меры позволяют, в частности, содействовать недавним интересующим точкам, придавая большую важность (то есть, назначая больший весовой коэффициент) опорным элементам, полученным во время, близкое ко времени оценки положения интересующего терминала.
В конкретных вариантах осуществления изменение набора опорных элементов для каждого опорного элемента набора опорных элементов содержит следующие этапы, на которых:
- вычисляют наименьшее расстояние, разделяющее упомянутый опорный элемент и одну из идентифицированных интересующих точек,
- если наименьшее вычисленное расстояние меньше заданного порога:
- связывают соответствующую интересующую точку с упомянутым опорным элементом,
- в противном случае:
- исключают упомянутый опорный элемент из набора опорных элементов.
В конкретных вариантах осуществления модификация набора опорных элементов содержит для каждого опорного элемента из набора опорных элементов следующие этапы, на которых:
- вычисляют для каждой идентифицированной интересующей точки значение, представляющее расстояние, отделяющее упомянутый опорный элемент от упомянутой интересующей точки,
- связывают значения, вычисленные таким образом, с упомянутым опорным элементом.
В конкретных вариантах осуществления линия беспроводной связи является восходящей линией связи в направлении базовой станции системы беспроводной связи.
В конкретных вариантах осуществления определение радиосигнатуры терминала содержит этапы, на которых:
- передают посредством терминала сообщение в направлении базовой станции,
- измеряют для каждой базовой станции значение, представляющее качество линии беспроводной связи, существующей между упомянутым терминалом и рассматриваемой базовой станцией, основываясь на сообщении, принимаемом от упомянутого терминала,
- формируют посредством сервера, соединенным с базовыми станциями, радиосигнатуру терминала на основе измеренных значений.
В конкретных вариантах осуществления калибровочный терминал снабжается системой позиционирования и определение радиосигнатуры упомянутого калибровочного терминала дополнительно содержит этапы, на которых:
- вставляют в сообщение, передаваемое упомянутым калибровочным терминалом, текущее географическое положение упомянутого калибровочного терминала, измеренное системой позиционирования,
- извлекают посредством сервера географическое положение, содержащееся в упомянутом сообщении.
Такие меры позволяют, частности, иметь возможность легко обогащать набор опорных элементов новыми опорными элементами, приходящими от калибровочных терминалов, что позволяет обнаруживать новые интересующие точки, которые могут появиться во времени, и/или удалять интересующие точки, которые стали устаревшими.
Стадия калибровки, содержащая определение или обогащение набора опорных элементов, может выполняться один раз в начале или может повторяться постоянно (например, периодически или способом, управляемым посылкой сообщений калибровочным терминалам) или может выполняться непрерывно (например, если калибровочные терминалы регулярно передают сообщения, содержащие свое текущее географическое положение).
Благодаря существованию некоторых конкретных терминалов, снабженных системой позиционирования, можно полностью автоматизировать стадию калибровки, которая содержит определение набора опорных элементов. Кроме того, реализация способа геолокации в системе беспроводной связи, в частности, является простой и недорогой, так как не требует дополнительных специальных аппаратных средств на базовых станциях или на большинстве терминалов (аппаратные средства и/или модификации программного обеспечения могут требоваться только на терминалах, действующих в качестве калибровочных терминалов).
В конкретных вариантах осуществления значением, представляющим качество линии беспроводной связи, существующей между терминалом и базовой станцией, является уровень принимаемой мощности радиосигнала, которым обмениваются упомянутая базовая станция и упомянутый терминал.
В конкретных вариантах осуществления линия беспроводной связи является каналом ультраузкополосной связи.
Система ультраузкополосной беспроводной связи ("Ultra Narrow Band" или UNB в англосаксонской литературе), в частности, адаптируется к использованию устройств типа IoT. Конечно, она позволяет осуществлять связь с низкой битовой скоростью, большой дальностью и малым потреблением энергии (система типа LPWAN, на английском языке "Low Power Wide Area Network").
В конкретных вариантах осуществления оценка географического положения интересующего терминала на основе радиосигнатуры упомянутого интересующего терминала и модифицированного набора опорных элементов выполняется, используя классификационный алгоритм машинного обучения, основанный на способе деревьев решений.
В соответствии со вторым подходом, представленное изобретение относится к системе беспроводной связи, содержащей терминалы и сеть доступа, содержащую базовые станции и сервер, соединенный с упомянутыми базовыми станциями. Упомянутая система содержит базу данных, запоминающую набор опорных элементов, сформированный на основе сообщений, передаваемых терминалами, называемыми “калибровочными терминалами”, и принимаемых по меньшей мере одной базовой станцией. Каждый опорный элемент содержит радиосигнатуру, связанную с географическим положением калибровочного терминала в момент, когда передается сообщение. Упомянутая радиосигнатура содержит значения, представляющие качества линий беспроводной связи, существующих между упомянутым калибровочным терминалом и базовыми станциями. Кроме того, сеть доступа выполнена с возможностью:
- измерения значений, представляющих качество линий беспроводной связи, существующих между базовыми станциями и терминалом, географическое положение которого должно быть оценено, называемым "интересующий терминал",
- формируют радиосигнатуру, соответствующую всем значениям, измеренным для упомянутого интересующего терминала,
- идентифицируют конкретные географические положения, называемые "интересующими точками", основываясь на наборе опорных элементов,
- модифицируют набор опорных элементов на основе идентифицированных интересующих точек,
- оценивают географическое положение интересующего терминала на основе радиосигнатуры интересующего терминала и модифицированного набора опорных элементов.
Краткое описание чертежей
Изобретение станет более понятным после прочтения нижеследующего описания, представленного в качестве примера, который никоим образом не создает ограничений, и созданного со ссылкой на фиг. 1-14, на которых:
фиг. 1 - система беспроводной связи, содержащая калибровочное устройство;
фиг. 2 - основные этапы традиционного способа геолокации терминала системы беспроводной связи;
фиг. 3 - основные этапы способа геолокации, соответствующего изобретению;
фиг. 4 - предпочтительный вариант осуществления, в котором калибровочное устройство является терминалом, снабженным системой позиционирования;
фиг. 5 - основные этапы предпочтительного варианта осуществления стадии калибровки способа геолокации;
фиг. 6 - основные этапы предпочтительного варианта осуществления стадии поиска способа геолокации;
фиг. 7 - основные этапы первого конкретного варианта осуществления этапа идентификации интересующих точек;
фиг. 8 - первый конкретный вариант осуществления этапа идентификации интересующих точек;
фиг. 9 - основные этапы второго конкретного варианта осуществления этапа идентификации интересующих точек;
фиг. 10 - второй конкретный вариант осуществления этапа идентификации интересующих точек;
фиг. 11 - основные этапы первого конкретного варианта осуществления этапа модификации опорного набора;
фиг. 12 - основные этапы второго конкретного варианта осуществления этапа модификации опорного набора;
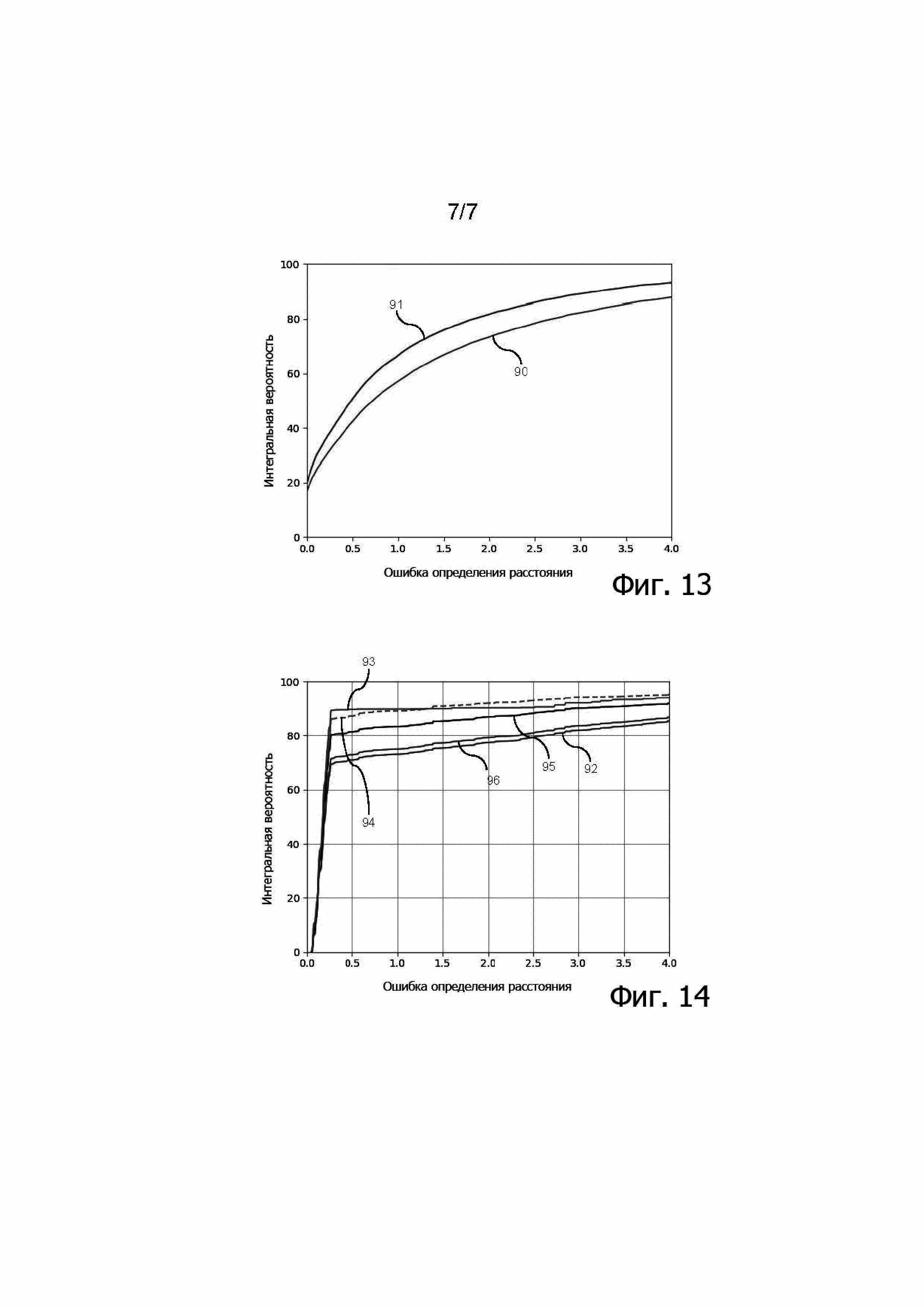
фиг. 13 - графики распределения ошибки определения расстояния для традиционного способа геолокации;
фиг. 14 - графики распределения ошибки определения расстояния для способа геолокации, соответствующего изобретению.
На представленных чертежах идентичные ссылки на разных чертежах обозначают идентичные или аналогичные элементы. В целях ясности элементы не обязательно показываются в масштабе, если не упомянуто что-либо иное.
Подробное описание вариантов осуществления
Как указано выше, представленное изобретение направлено на оценку географического положения терминала, называемого "интересующий терминал", в системе беспроводной связи, используя способ обучения, основанный на информации, представляющей качество линий беспроводной связи, существующих между упомянутым терминалом и базовыми станциями упомянутой системы беспроводной связи.
На фиг. 1 схематично представлена система 60 беспроводной связи, содержащая множество терминалов 70 и сеть 80 доступа, содержащую множество подключенных базовых станций 81 и сервер 82, соединенный с упомянутыми базовыми станциями 81. В такой системе 60 связь обычно может быть двунаправленной, то есть, данные могут передаваться от сети 80 доступа к терминалу 70 по нисходящей линии беспроводной связи или от терминала 70 к сети 80 доступа по восходящей линии беспроводной связи. Таким образом, измерение качества линии беспроводной связи, существующей между терминалом 70 и базовой станцией 81 сети 80 доступа, может выполняться, например, одним или другим из этих объектов.
Таким образом, в систему 60 беспроводной связи можно ввести одно или более калибровочных устройств 71, приспособленных к точному определению текущего географического положения, например, с помощью системы позиционирования, такой как GPS-приемник. Это калибровочное устройство 71 дополнительно имеет средства, выполненные с возможностью разрешения измерения значения, представляющего качество линии беспроводной связи, существующей между ним и базовыми станциями 81 сети 80 доступа. Как указано выше, это измерение может выполняться, например, самим калибровочным устройством 71 на нисходящей линии связи или базовой станцией 81 сети 80 доступа на восходящей линии связи. Если измерение выполняется калибровочным устройством 71 на нисходящей линии связи, это измерение может быть сделано, например, на радиосигналах, предназначенных для терминалов 70 системы, отличных от калибровочного устройства 71.
Значения, представляющие качество линии беспроводной связи, существующей между терминалом 70 или калибровочным устройством 71 и базовой станцией 81, могут передаваться серверу 82, чтобы он реализовал определенные этапы способа геолокации.
На фиг. 2 показаны две основных стадии способа 10 геолокации интересующего терминала 70 системы 60 беспроводной связи, основанного на способе обучения.
Первая стадия 20 калибровки содержит:
- этап 22 определения радиосигнатур, соответственно связанных с известными географическими положениями, причем каждая радиосигнатура соответствует набору значений, представляющих качество линий беспроводной связи, существующих между калибровочным устройством 71, географическому положению, которое известно, и множеству базовых станций 81 сети доступа 80 системы 60 беспроводной связи, и
- этап 24, на котором в наборе 26 опорных элементов сохраняют каждую радиосигнатуру и связанное с ней географическое положение калибровочного устройства 71.
В остальной части описания "географическое положение" означает набор из двух координат, соответствующих широте и долготе, соответственно. Следует заметить, что возможны альтернативы определения географического положения. Например, может учитываться также третья координата, соответствующая высоте относительно среднего уровня моря.
Короче говоря, эта стадия 20 калибровки содержит создание своего рода радиокарты рассматриваемой географической зоны.
Затем стадия 40 поиска содержит этапы, на которых:
- на этапе 42 определяют радиосигнатуру упомянутого интересующего терминала 70, расположенного в географическом положении, подлежащем оценке,
- на этапе 44 оценивают географическое положение упомянутого интересующего терминала 70 на основе определенной радиосигнатуры и набора 26 опорных элементов, собранного во время стадии 20 калибровки.
Способ 10 геолокации, соответствующий изобретению, вводит дополнительную стадию 30, называемую "стадией 30 оптимизации", которая имеет целью очистку набора 26 опорных элементов (то есть, удаление нежелательных опорных элементов) и/или его обогащение (то есть, добавление информации к хранящимся опорным элементам), чтобы улучшить оценку 44 географического положения опорного терминала 70.
Эта стадия 30 оптимизации основана на идее, что терминалы 70 могут иметь тенденцию проходить через определенные географические положения сходимости терминалов 70 системы 60 (это означает географические положения, через которые имеют тенденцию проходить большое количество терминалов 70). В таких определенных географических положениях количество сообщений, передаваемых терминалами 70, таким образом, в среднем больше, чем в любом другом месте. В некоторых случаях терминалы 70 могут также предпочтительно занимать конечный набор определенных географических положений (другими словами, в заданное время терминал 70 может статистически иметь повышенную вероятность расположения в одном из этих определенных географических положений, чем в другом месте). В описании "интересующая точка" относится к такому конкретному географическому положению.
Такая ситуация наблюдается, например, в случае транспортирования товаров, перемещающихся со склада на склад со временем перемещения, относительно более коротким, чем время, проводимое на складе. Например, можно снабдить грузовые поддоны, используемые для транспортирования товаров, терминалами 70 системы 60 беспроводной связи, чтобы иметь возможность осуществлять их геолокацию. Различные склады, на которых грузовые поддоны успешно хранятся, таким образом, соответствуют интересующим точкам способа 10 геолокации. Грузовик, транспортирующий упомянутые грузовые поддоны, может, например, нести на себе калибровочное устройство 71, позволяющее формировать набор 26 опорных элементов.
Чтобы оценить географическое положение интересующего терминала 70, вместо того чтобы оценивать положение терминала 70 по всей географической зоне покрытия, способ 10 геолокации, соответствующий изобретению, оценивает положение интересующего терминала 70 в соответствии с идентифицированными интересующими точками. Другими словами, вместо того, чтобы использовать традиционный способ регрессии, который может требовать очень большого количества опорных элементов (и, таким образом, очень больших вычислительных мощностей и времени вычисления), чтобы получить разумную точность, способ 10 геолокации, соответствующий изобретению, использует классификационный алгоритм машинного обучения, который содержит, например, назначение интересующему терминалу 70 вероятности расположения в каждой из идентифицированных интересующих точек. Предполагаемое географическое положение интересующего терминала 70 может, таким образом, например, быть определено как географическое положение интересующей точки, в которой он имеет наибольшую вероятность расположения. В соответствии со значением возвращенной вероятности (например, если она меньше заданного порога), также можно определить, не располагается ли терминал 70 в интересующем месте (например, если это терминал 70, находящийся на грузовом поддоне, который движется между двумя складами).
На фиг. 3 схематично показаны основные стадии способа 10 геолокации, соответствующего изобретению. Помимо стадии 20 калибровки и стадии 40 поиска, уже описанных со ссылкой на фиг. 2, способ 10 геолокации содержит стадию 30 оптимизации.
Эта стадия 30 оптимизации содержит первый этап 32 идентификации интересующих точек, который на основе набора 26 опорных элементов, собранных во время стадии 20 калибровки, позволяет определить набор 35 интересующих точек. Этот этап будет описан подробно позже со ссылкой на фиг. 7-10.
Затем, используя набор 35 идентифицированных интересующих точек, этап 34, модифицирующий набор 26 опорных элементов, обеспечивают модифицированный набор 36 опорных элементов, который, таким образом, используется на стадии 40 поиска, чтобы определить географическое положение интересующего терминала 70. Этот этап 34 изменения 34 будет позже описан подробно со ссылкой на фиг. 10 и 11.
Конечно, предпочтительно идентифицировать интересующие точки и назначить большую важность опорным элементам, географическое положение которых близко к положению интересующей точки. Например, можно исключить опорные элементы, географическое положение которых удалено от интересующей точки на расстояние, большее, чем заданный порог. Кроме того, предпочтительно связать с каждым опорным элементом ближайшую интересующую точку или значение, представляющее расстояние, которое отделяет географическое положение упомянутого опорного элемента от каждой интересующей точки. Такие меры, конечно, позволять уменьшить "шум", формируемый элементами, которые не группируются вместе вблизи интересующих точек, в соотношении, которое алгоритм машинного обучения стремится установить между радиосигнатурой и интересующей точкой.
Здесь, "расстояние" означает расстояние, вычисленное традиционным способом между двумя географическими положениями, выраженными, используя долготу и широту. Таким образом, "расстояние между двумя опорными элементами" означает расстояние между географическими положениями упомянутых двух опорных элементов. То же самое применяется в описании повсеместно, если не упомянуто иное.
В остальной части описания, для примера и способом, не создающим ограничений, рассматривается случай ультраузкополосной системы 60 беспроводной связи. "Ультраузкополосная связь" ("Ultra Narrow Band" или UNB в англосаксонской литературе) означает, что мгновенный частотный спектр радиоэлектрических сигналов, передаваемых терминалами, имеет ширину полосы частот меньше двух килогерц или даже меньше одного килогерца. "Радиоэлектрическая" означает электромагнитную волну, распространяющуюся беспроводными средствами, частоты которой содержатся в традиционном спектре радиоэлектрических волн (от нескольких Герц до нескольких сотен Гигагерц). Такие системы UNB беспроводной связи, в частности, приспосабливаются к использованию устройств типа IoT или типа M2M (англосаксонское сокращение для "Machine to Machine", машина-машина).
В такой системе 60 беспроводной связи обмен данными, по существу, является однонаправленным, в данном случае по восходящей линии связи от терминалов 70 к сети доступа 80 упомянутой системы 60 беспроводной связи. Чтобы минимизировать риски потери сообщения, передаваемого терминалом 70, планирование сети 80 доступа часто выполняется таким образом, что заданная географическая зона одновременно перекрывается множеством базовых станций 81, так что сообщение, передаваемое терминалом 70, может быть принято множеством базовых станций 81.
Каждая базовая станция 81 адаптируется к приему сообщений от терминалов 70, которые располагаются в пределах дальности ее действия. Каждое сообщение, принимаемое таким образом, например, передается серверу 82 сети 80 доступа, как вариант, в сопровождении другой информации, такой как идентификатор базовой станции 81, которая принимает его, значение, представляющее качество радиосигнала, несущего сообщение, центральная частота, на которой было принято сообщение, дата, когда было принято сообщение, и т.д. Сервер 82 обрабатывает, например, все сообщения, принятые от различных базовых станций 81. Сервер 82 может, в частности, использоваться для реализации способа 10 геолокации терминала 70 системы 60.
На фиг. 4 схематично показан предпочтительный вариант осуществления такой системы 60, в которой некоторые терминалы 72 системы 60 беспроводной связи, называемые "калибровочными терминалами 72", имеют систему позиционирования (например GPS-приемник), позволяющую с точностью получать географическое положение терминала 72 (например, когда последний располагается в месте, в котором он может принимать сигналы спутников упомянутой системы позиционирования). Эти калибровочные терминалы 72 действуют как калибровочные устройства 71, упомянутые выше, в дополнение к их каждодневным функциям в системе 60 беспроводной связи.
Следует заметить, что возможны и другие способы получения географического положения калибровочного терминала 72. Например, географическое положение калибровочного терминала 72 может быть определено на основе адреса MAC (сокращенное от "Medium Access Control", управление доступом к среде) точки доступа Wi-Fi, с которой соединяется упомянутый калибровочный терминал 72, если географическое положение упомянутой точки доступа известно. Выбор конкретного способа определения географического положения калибровочного терминала 72 является просто альтернативой реализации изобретения.
На фиг. 5 показаны основные этапы предпочтительного варианта осуществления стадии 20 калибровки способа 10 геолокации.
Для этой стадии 20 калибровки вместо того, чтобы преднамеренно двигаться через географическую зону, которая должна быть перекрыта специальным устройством, адаптированным к определению географического положения и измерению значения, представляющего качество линии беспроводной связи в этом положении, предпочтительно для выполнения этой роли использовать возможную мощность вычислительных средств некоторых терминалов системы и в этом случае это касается калибровочных терминалов 72.
Таким образом, первый этап стадии 20 калибровки содержит передачу 220 калибровочным терминалом 72 сообщения, содержащего текущее географическое положение, сети 80 доступа системы 60 беспроводной связи. Следует заметить, что это сообщение может передаваться независимо от способа 10 геолокации. Например, оно может быть традиционным сообщением для удаленного считывания информации, содержащей текущее географическое положение, и не иметь основной целью участие в стадии 20 калибровки способа 10 геолокации.
Базовые станции 81 сети 80 доступа, которые принимают сигнал, содержащий упомянутое сообщение, таким образом, выполняют измерение 221 качества линии беспроводной связи, по которой было передано сообщение. В предпочтительном варианте осуществления и в остальной части описания в качестве примера, не создающего ограничений, значение, представляющее качество используемой линии беспроводной связи, является средним уровнем принимаемой базовой станцией 81 мощности (RSSI), выраженным, например, в децибелах, для сигнала, несущего упомянутое сообщение.
Следует заметить, что могут использоваться и другие значения, представляющие качество линии беспроводной связи, например, такие как затухание сигнала, отношение сигнал-шум сигнала (SNR или "Signal on Noise Ratio" в англосаксонской литературе) или индикатор качества канала связи (CQI или "Channel Quality Indicator" на английском языке).
На этапе 222 формирования радиосигнатуры сервер 82, таким образом, собирает уровни RSSI, измеренные различными базовыми станциями 81, и вводит их в радиосигнатуру, определенную, таким образом, для калибровочного терминала 72. Для базовых станций 81, которые не принимали сообщение, например, потому что терминал 72 находится слишком далеко и не располагается в их зоне радиопокрытия, например, по умолчанию используется значение -160 дБ.
Следует заметить, что для выбора базовых станций, учитываемых при формировании радиосигнатуры, возможно множество вариантов. Согласно первому примеру, традиционно рассматривают все базовые станции системы 60 беспроводной связи. Согласно другому примеру, можно ограничить количество базовых станций, чтобы учитывать, например, только ограниченную интересующую географическую зону.
Сервер 82, таким образом, выполняет извлечение 224 информации о географическом положении, содержащейся в сообщении, передаваемом калибровочным терминалом 72 (как напоминание, это сообщение было заранее передано серверу 82 базовыми станциями 81, которые его приняли).
Наконец, пара фрагментов информации, образованной географическим положением калибровочного терминала 72 и сопутствующей радиосигнатурой, добавляется к набору 26 из опорных элементов, собранному во время стадии 20 калибровки. Этот этап, например, содержит сохранение 24 пары фрагментов информации, сформированной географическим положением и сопутствующей радиосигнатурой, в базе данных, запоминаемой в сервере 82.
В конкретных вариантах осуществления этапы стадии 20 калибровки, описанной выше, повторяются за заданное время, например, более чем за несколько дней, или даже за несколько недель или несколько месяцев, для калибровочных терминалов 72 системы 60 беспроводной связи, чтобы получить набор 26 опорных элементов, содержащий значительное количество фрагментов информации, то есть, точную карту зоны, подлежащей покрытию. В одной из альтернатив этапы стадии 20 калибровки повторяются до тех пор, пока в наборе 26 не будет получено заданное количество опорных элементов.
В предпочтительном варианте осуществления набор 26 опорных элементов непрерывно обогащается новыми опорными элементами, поступающими от калибровочных терминалов 72. Такие меры позволяют, в частности, обнаруживать новые интересующие точки, которые могут появиться во времени, и/или забывать интересующие точки, которые стали устаревшими.
Следует заметить, что точно так же, как интересующие терминалы 70, калибровочные терминалы 72 мобильны и могут, таким образом, обеспечивать опорные данные, соответствующие различным географическим положениям.
В конкретных вариантах осуществления набор 26 опорных элементов также непрерывно обогащается элементами каждого соответствующего предполагаемому географическому положению интересующего терминала 70, связанными с радиосигнатурой упомянутого интересующего терминала 70.
Следует также заметить, что в соответствии с другими вариантами осуществления информация о текущем географическом положении калибровочного терминала 72 может передаваться системой связи, отличной от той, в которой выполняются измерения RSSI, позволяющие определить радиосигнатуру упомянутого калибровочного терминала 72. Например, текущее географическое положение калибровочного терминала 72 может быть передано серверу 82 через мобильную телефонную сеть типа GSM, UMTS или LTE, тогда как сообщение, для которого выполняются измерения RSSI, передается сети 80 доступа системы 60 беспроводной связи UNB. Для облегчения понимания, на сервере 82 возможна связь радиосигнатуры, определенной для калибровочного терминала 72 с его текущим географическим положением, например, с временной меткой сообщения, несущего информацию о текущем географическом положении, и сообщения, передаваемого системе беспроводной связи UNB.
На фиг. 6 показаны основные этапы предпочтительного варианта осуществления стадии 40 поиска способа 10 геолокации.
Эта стадия 40 поиска инициируется передачей 420 сообщения интересующего терминала 70 сети 80 доступа системы 60 беспроводной связи. Это сообщение может быть любым заданным сообщением, передаваемым независимо от способа 10 геолокации терминала. Например, это сообщение может передаваться для целей дистанционного считывания информации, которая не имеет никакого отношения к геолокации терминала 70. Альтернативно, это сообщение может передаваться намеренно с целью геолокации терминала 70. Во всех случаях, содержание сообщения не обязательно обладает важностью на стадии 40 поиска.
Аналогично тому, что выполняется для стадии 20 калибровки, базовые станции 81 сети 80 доступа, которые приняли упомянутое сообщение, выполняют измерение 421 уровня RSSI сигнала, переносящего сообщение.
На этапе 422 формирования радиосигнатуры сервер 82, таким образом, собирает уровни RSSI, измеренные различными базовыми станциями 81, и включает их в радиосигнатуру, определенную, таким образом для интересующего терминала 70.
Оценка 44 географического положения интересующего терминала 70, передавшего сообщение, таким образом, выполняется, с одной стороны, на основе набора 36 опорных элементов, модифицируемых на стадии 30 оптимизации, и, с другой стороны, на основе радиосигнатуры, определенной для интересующего терминала 70, географическое положение которого должно быть оценено.
На фиг. 7 схематично показаны основные этапы первого конкретного варианта осуществления этапа 32 идентификации интересующих точек. Этот этап 32 идентификации интересующих точек реализуется услугой 82 на стадии 30 оптимизации на основе набора 26 опорных элементов, собранного на стадии 20 калибровки.
Первый этап соответствует делению 320 географической зоны, которая должна быть перекрыта, на множество ячеек, размеры которых определяются заранее. Это деление может соответствовать, например, делению географической зоны, которая должна быть покрыта, с помощью регулярной сетки, причем ячейки, таким образом, соответствуют одинаковым квадратам. В соответствии с другим примером, ячейки могут иметь круглую форму с заранее определенным фиксированным диаметром и частичным наложением каждой ячейки по меньшей мере на одну другую ячейку, чтобы перекрыть всю площадь географической зоны. Согласно еще одному примеру, ячейки могут иметь различные формы и/или размеры, определяемые, например, в соответствии с определенными фрагментами информации, известными до разделения терминалов 70 по географической зоне, которая должна быть перекрыта.
Сервер 82 затем выполняет для каждой ячейки этап 322, на котором вычисляет количество NC опорных элементов, географические положения которых находятся внутри упомянутой ячейки.
Если для данной ячейки количество NC, вычисленное таким образом, больше или равен заданному порогу N1, то интересующая точка идентифицируется для упомянутой ячейки. Интересующая точка может, например, быть определена как являющаяся центром ячейки. В одной альтернативе интересующая точка может быть определена как среднее значение географических положений опорных элементов, расположенных в ячейке.
Когда все ячейки учтены, этап 32 идентификации интересующих точек заканчивается. Набор 35 идентифицированных интересующих точек, таким образом, доступен и запоминается в сервере 82.
На фиг. 8 показан первый конкретный вариант осуществления этапа 32 идентификации интересующих точек, описанный со ссылкой на фиг. 7. Географическая зона 50 делится на сетку из 16 идентичных ячеек квадратной формы. Каждая ячейка идентифицируется парой "L-C", где L является буквой от А до D и C является цифрой от 1 до 4. Опорные элементы 51, полученные во время стадии 20 калибровки, показаны крестиками. Каждый крестик представляет географическое положение, связанное с опорным элементом 51, полученным в рассматриваемой географической зоне 50. В рассматриваемом примере:
- NC = 0 для ячеек A-1, D-1, C-2 и B-3, NC = 1 для ячеек C-1, D-2, A-3, C-4 и D-4,
- NC = 2 для ячеек A-2, B-2, D-3 и B-4, NC = 5 для ячейки A-4,
- NC = 6 для ячейки C-3, и
- NC = 7 для ячейки B-1.
В рассматриваемом примере порог N1 устанавливается равным 5 и интересующая точка 52 определяется как центр ячейки для который NC ≥ N1. Каждая интересующая точка 52, определенная таким образом, показана на фиг. 7 черной точкой. В рассматриваемом примере идентифицируются три интересующих точки 52. Они соответствуют центру ячеек B-1, C-3 и A-4, соответственно.
Этот первый конкретный вариант осуществления этапа 32 идентификации интересующих точек является более или менее точным в соответствии с размерами ячеек. Например, на фиг.8 понятно, что центр ячейки C-3 находится относительно далеко от более вероятного положения интересующей точки, которое может быть расположено в нижней правой части ячейки, где располагается большинство опорных элементов 51, находящихся в упомянутой ячейке.
На фиг. 9 схематично показаны основные этапы второго конкретного варианта осуществления этапа 32 идентификации интересующих точек.
Для этого второго конкретного варианта осуществления этапа 32 идентификации интересующих точек операции выполняются на временном наборе 27 опорных элементов, который первоначально соответствует набору 26 опорных элементов, полученному на стадии 20 калибровки. Таким образом, набор 26 опорных элементов, полученный во время стадии 20 калибровки, не модифицируется в этом втором варианте осуществления этапа 32 идентификации интересующих точек.
На первом этапе сервер 82 выполняет вычисление 321 расстояний, разделяющих два опорных элемента набора 27.
На втором этапе для каждого опорного элемента временного набора 27 опорных элементов сервер 82 выполняет на этапе 323 вычисление количества NV опорных элементов, называемых "соседними элементами", расстояние которых от рассматриваемого опорного элемента меньше или равно заданному порогу D1.
Затем существует этап 325 определения количества NVmax, соответствующий наибольшему значению из ранее вычисленных количеств NV.
Если NVmax больше или равно заданному пороговому значению N2, сервер 82 затем выполняет этап 327 определения интересующей точки на основе опорного элемента, для которого количество соседей равно NVmax, называемому "интересующий элемент", затем этап 329 по исключению упомянутого интересующего элемента и его соседних элементов временного набора 27. Интересующая точка определяется, например, как среднее значение географических положений интересующего элемента и его соседних элементов. Согласно другому примеру, интересующая точка может быть определена просто как географическое положение интересующего элемента.
Затем оценивается условие остановки. Пока упомянутое условие остановки не достигнуто, существует периодическое повторение, начинающееся с этапа 323 вычисления количества соседних элементов, остающихся во временном наборе 27.
Если количество NVmax, вычисленное на этапе 325, меньше, чем N2, то условие остановки оценивается непосредственно.
Условие остановки достигается, например, если было идентифицировано заданное количество интересующих точек или если количество NVmax становится меньше заданного порога или если во временном наборе 27 нет больше элементов. Когда условие остановки достигнуто, этап 32 идентификации интересующих точек заканчивается. Набор 35 идентифицированных интересующих точек, таким образом, доступен и запоминается в сервере 82.
На фиг. 10 показан второй конкретный вариант осуществления этапа 32 идентификации интересующих точек, описанный со ссылкой на фиг. 9.
На фиг. 10 показана географическая зона 50 и опорные элементы 51, идентичные показанным на фиг. 8. Окружности 530, 531, 532, показанные пунктирными линиями соответственно группируют вместе интересующие элементы 510, 511, 512 и их соседние элементы. В рассматриваемом примере первый интересующий элемент 512 определяется с 5 соседними элементами. Интересующая точка 522, таким образом, определяется как среднее значение географических положений упомянутого интересующего элемента 512 и его соседних элементов (расположенных внутри окружности 532). Затем, при повторении определяется второй интересующий элемент 511 с 4 соседними элементами. Таким образом определяется интересующая точка 521. Наконец, при третьем и последнем повторении на основе интересующего элемента 510, также имеющего 4 соседних элемента, определяется третья интересующая точка 520. Следует заметить, что в рассматриваемом примере, если множество элементов имеют одно и то же значение NVmax соседей, то выбор того или иного интересующего элемента является произвольным.
В конкретных вариантах осуществления этап 32 идентификации интересующих точек, описанный со ссылкой на фиг. 7 и 9, может дополнительно содержать этап группирования и/или фильтрации идентифицированных интересующих точек. Например, если две интересующие точки располагаются на расстоянии, меньшем заданного порога, то они группируются в единую интересующую точку. Согласно другому примеру, если для заданной интересующей точки количество элементов набора 26 опорных элементов, расположенных на расстоянии от упомянутой интересующей точки, меньшем заданного расстояния, меньше заданного порога, то упомянутая интересующая точка исключается.
В конкретных вариантах осуществления, вместо вычисления целого числа опорных элементов (например, на этапах 322 и 323) можно использовать значение, представляющее количество опорных элементов, вычисленное в соответствии с весовым коэффициентом, назначенным каждому опорному элементу, и представляющее время, прошедшее между моментом использования линий беспроводной связи (измеренные уровни RSSI которых используются для определения радиосигнатуры) и моментом, когда идентифицируются интересующие точки. Такие меры позволяют, в частности, способствовать недавним интересующим точкам, придавая большее значение (то есть, назначая больший весовой коэффициент) недавним опорным элементам, то есть, опорным элементам, соответствующим сообщениям, переданным недавно калибровочными терминалами 72. Например, весовой коэффициент может быть определен для опорного элемента в зависимости от времени:

где:
A и σ - постоянные параметры,
t - время, прошедшее с момента, когда принято сообщение, передаваемое калибровочным терминалом 72 и используемое для определения опорного элемента,
exp () - экспоненциальная математическая функция.
При таком определении весового коэффициента, чем больше время, которое прошло после приема сообщения, которое использовалось для определения опорного элемента, тем меньше значение соответствующего весового коэффициента и, таким образом, меньше значение, придаваемое опорному элементу по сравнению с другими опорными элементами, для которых соответствующее сообщение было получено позже. Таким образом, возможно ускорить открытие новых интересующих точек и игнорировать устаревшие интересующие точки.
На фиг. 11 схематично показаны основные этапы первого конкретного варианта осуществления этапа 34 модификации набора 26 опорных элементов на основе набора 35 идентифицированных интересующих точек.
В первом шаге сервер 82 выполняет для каждого элемента набора 26 опорных элементов вычисление 340 самого малого расстояния Dmin между упомянутым опорным элементом и интересующей точкой набора 35 идентифицированных интересующих точек.
Если это расстояние Dmin меньше или равно заданному порогу D2, то тогда сервер 82 осуществляет связь 342 между интересующей точкой, соответствующей расстоянию Dmin, и опорным элементом. Другими словами, опорный элемент обогащается уникальным идентификатором или меткой интересующей точки. Опорный элемент, обогащенный таким образом, содержит радиосигнатуру, географическое положение и метку, соответствующую интересующей точке, с которой она связана.
Если, однако, Dmin> D2, то сервер 82 на этапе 344 выполняет исключение опорного элемента.
Когда все опорные элементы учтены, этап 34 модификации заканчивается и модифицированный набор 36 опорных элементов, таким образом, доступен. Этот набор 36 содержит только опорные элементы, которые смогли быть связаны с интересующей точкой, то есть, опорные элементы, достаточно близкие к интересующей точке. Набор 36 содержит для каждой интересующей точки определенное количество связанных радиосигнатур.
На фиг. 12 схематично показаны основные этапы второго конкретного варианта осуществления этапа 34 модификации набора 26 опорных элементов на основе набора 35 идентифицированных интересующих точек.
Сервер 82, таким образом, на этапе 343 выполняет связь значений вероятности, вычисленной таким образом, с опорным элементом. Другими словами, опорный элемент обогащается набором значений, причем каждое значение представляет вероятность связи с интересующей точкой. Опорный элемент, обогащенный таким образом, содержит радиосигнатуру, географическое положение и значение вероятности для каждой идентифицированной интересующей точки.
Когда все опорные элементы были учтены, этап 34 модификации заканчивается и модифицированный набор 36 опорных элементов становится, таким образом, доступен. Набор 36, таким образом, содержит для каждой радиосигнатуры опорного элемента вероятность связи с идентифицированной интересующей точкой.
На стадии 40 поиска оценка 44 географического положения интересующего терминала 70 выполняется, например, используя стандартный классификационный алгоритм машинного обучения типа "дерева решений". Тот факт, что опорные элементы, присутствующие в наборе 36, были обогащены, действительно позволяет преобразовывать проблему, обычно ищущую решение в форме регрессии, в проблему классификации. Действительно, во время стадии 30 оптимизации каждому интересующему пункту присваивается метка и радиосигнатура, связанная с каждым опорным элементом, "классифицируется" в соответствии с вероятностью принадлежности к определенной метке. Во время стадии 40 поиска, на основе радиосигнатуры интересующего терминала 70 и используя опорные элементы, присутствующие в модифицированном наборе 36, классификационный алгоритм, таким образом, способен обеспечивать вероятность упомянутой радиосигнатуры, принадлежащей определенной метке. Географическое положение интересующего терминала 70, таким образом, обычно оценивается как географическое положение интересующей точки, соответствующей метке с наибольшим значением вероятности. Если наибольшее значение вероятности меньше заданного порога, также можно прийти к заключению, что интересующий терминал 70 не располагается ни в одной из идентифицированных интересующих точек (и в таком случае интересующий терминал 70, вероятно находится на переходе между двумя интересующими точками).
Множество моделирований показывают, что тот факт, что набор 26 опорных элементов был обогащен и/или очищен на стадии 30 оптимизации, дает классификационному алгоритму заметный выигрыш по точности. Результаты этих моделирований показаны на фиг. 13 и 14.
Для выполнения этих моделирований во время стадии 20 калибровки собирают набор 26 опорного элемента, который используется для каждого моделирования. Кроме того, доступны элементы, называемые "тестовыми элементами", отличающиеся от опорных элементов. Каждый тестовый элемент содержит радиосигнатуру и известное географическое положение. Для каждого тестового элемента оценивается географическое положение и вычисляется ошибка определения расстояния, соответствующая расстоянию между предполагаемым географическим положением и известным географическим положением. На графиках, таким образом, представлены кривые 90-96, представляющие распределение ошибки определения расстояния для всех тестовых элементов или только для выборки тестовых элементов.
При этих моделированиях используются 200 000 опорных элементов и 200 000 тестовых элементов. Размер рассматриваемой географической зоны соответствует приблизительно размеру такой большой страны, как Франция.
Для моделирований, результаты которых показаны в фиг. 13, используется традиционный способ геолокации, основанный на регрессивном алгоритме машинного обучения. Географическое положение оценивается алгоритмом для каждого тестового элемента на основе радиосигнатуры упомянутого тестового элемента и набора 26 опорных элементов, полученного во время стадии 20 калибровки.
График 90 показывает распределение ошибки определения расстояния для всех доступных тестовых элементов.
Что касается графика 91, то он показывает распределение ошибки определения расстояния для выборки, соответствующей тестовым элементы, достаточно близким к идентифицированным интересующим точкам. В рассматриваемом примере интересующие точки идентифицируются на основе набора 26 опорных элементов, используя второй конкретный вариант осуществления этапа 32 идентификации интересующих точек, как описано со ссылкой на фиг. 9, и тестовый элемент считается достаточно близким к интересующей точке, если наименьшее расстояние (Dmin) между известным географическим положением упомянутого тестового элемента и идентифицированной интересующей точкой меньше или равно порогу (D2). Для этих моделирований значение D2 устанавливается равным 250 метров.
Таким образом, из фиг. 13 понятно, что регрессивный алгоритм более точен, когда он оценивает географическое положение интересующего терминала 70, расположенного вблизи одной из идентифицированных интересующих точек. Интуитивно это объясняется тем фактом, что алгоритм обучения имеет лучшее знание соотношения, существующего между радиосигнатурой и географическим положением для элементов, близких к интересующей точке, поскольку в наборе 26 географическая плотность опорных элементов более близка к интересующим точкам. Точность регрессивного алгоритма, однако, неудовлетворительна, например, ошибка расстояния составляет меньше 0,5 км только приблизительно в 50% случаев.
На фиг. 14 показаны результаты, полученные способом 10 геолокации, соответствующим изобретению. Классификационный алгоритм машинного обучения используется для стадии 40 поиска и использует набор 36 опорных элементов, модифицированный на стадии 30 оптимизации. В рассматриваемом примере стадия 30 оптимизации содержит этап 32 идентификации интересующих точек в соответствии с конкретным вариантом осуществления, описанным со ссылкой на фиг. 9, и этап 34 модификации набора 26 опорных элементов в соответствии с конкретным вариантом осуществления, описанным со ссылкой на фиг. 11. Классификационный алгоритм, таким образом, обеспечивает для рассматриваемого тестового элемента значение вероятности для упомянутого тестового элемента, связанного с идентифицированной интересующей точкой. Предполагаемое географическое положение тестового элемента, таким образом, определяется как географическое положение интересующей точки, для которой упомянутое значение вероятности является наибольшим. Для этих моделирований значение D1 также устанавливается равным 250 метров и пороговое значение N2 устанавливается равным 300.
График 92 показывает распределение ошибки определения расстояния для всех тестовых доступных элементов. В этом случае ошибка определения расстояния составляет меньше 0,5 км приблизительно в 70% случаев.
График 93 показывает распределение ошибки определения расстояния для выборки тестовых элементов, использованной для графика 91, соответствующей рассматриваемым тестовым элементам, которые должны быть достаточно близко к идентифицированным интересующим точкам (расстояние до интересующей точки меньше или равно порогу D2). Для этой выборки ошибка определения расстояния составляет менее 0,5 км приблизительно в 90% случаев.
График 94 показывает распределение ошибки определения расстояния для выборки тестовых элементов, для которых наибольшее значение вероятности, связанное с интересующей точкой, больше или равно 0,9. Для этой выборки ошибка определения расстояния составляет меньше 0,5 км приблизительно в 87% случаев. Эта выборка группирует вместе 56% тестовых элементов. В этом случае 32% тестовых элементов, рассматриваемых как находящиеся вблизи интересующей точки (расстояние, меньшее или равное порогу D2), были "ошибочно" удалены из выборки.
График 95 показывает распределение ошибки определения расстояния для выборки тестовых элементов, для которых наибольшее значение вероятности, связанное с интересующей точкой, больше или равно 0,7. Для этой выборки ошибка определения расстояния составляет меньше 0,5 км приблизительно в 82% случаев. Эта выборка группирует вместе 76% тестовых элементов. В этом случае 15% тестовых элементов, которые считаются близкими к интересующей точке (расстояние до интересующей точки меньше или равно порогу D2), были "ошибочно" удалены из выборки.
График 96 показывает распределение ошибки определения расстояния для выборки тестовых элементов, для которых наибольшее значение вероятности, связанное с интересующей точкой, больше или равно 0,4. Для этой выборки ошибка определения расстояния составляет меньше 0,5 км приблизительно в 73% случаев. Эта выборка группирует вместе 96% тестовых элементов. В этом случае, 1,5% тестовых элементов, которые, как полагают, близки к интересующей точке (расстояние до интересующей точки меньше или равно порогу D2), были "ошибочно" удалены из выборки.
В различных случаях, представленных графиками 92-96, ошибка определения расстояния составляет меньше 0,2 км приблизительно в 50% случаев.
Таким образом, ясно, что способ 10 геолокации, соответствующий изобретению, результаты которого показаны на графиках 92-96 на фиг. 14, явно более точен, чем традиционный способ 10 геолокации, результаты которого поясняются графиками 90 и 91 на фиг. 13.
Результаты на фиг. 14 показывают, что с помощью способа 10 геолокации, соответствующего изобретению, можно с хорошей точностью оценить географическое положение интересующего терминала 70, расположенного вблизи интересующей точки. Также возможно определить, имеет ли интересующий терминал 70 высокую вероятность пребывания в пути между двумя интересующими точками (например, если наибольшее значение возвращенной вероятности, меньше заданного порога).
Пороговое значение вероятности позволяет определить, может ли положение интересующего терминала 70 быть связано с положением интересующей точки или, если напротив, следует считать, что упомянутый интересующий терминал 70 находится в пути между интересующими точками. Это пороговое значение вероятности может быть определено, например, в соответствии с кривой, соединяющей качество прогноза и доверительную вероятность этого прогноза (например, на основе точки перегиба или индекса Юдена для кривой ROC (сокращение для "Receiver Operating Characteristic", рабочая характеристика приемника). В соответствии с другим примером, оно может быть выбрано произвольным способом в соответствии с ограничениями, связанными с областью использования. Например, если необходимо наличие очень высокой точности геолокации интересующего терминала 70, при риске отсутствия способности оценить положение значительного количества интересующих терминалов 70, должно быть назначено пороговое значение с высокой вероятностью, например, значение 0,9, как в примере, показанном на графике 94. Если напротив, необходимо иметь возможность геолокации значительной доли интересующих терминалов 70, рискуя тем, что понизится точность геолокации, то должно быть назначено более низкое пороговое значение вероятности, например, значение 0,4, как в примере, показанном на графике 95. Для рассматриваемого примера, а именно, способа геолокации грузовых поддонов товаров на значительной площади географической поверхности, соответствующей, например, стране или континенту, пороговое значение вероятности приблизительно 0,7 представляется хорошим компромиссом.
Представленное выше описание ясно показывает, что благодаря его различным признакам и преимуществам, данное изобретение достигает поставленных целей и также обеспечивает дополнительные преимущества.
В частности, способ 10 геолокации, соответствующий изобретению, значительно улучшает характеристики с точки зрения точности относительно стандартных способов геолокации, основанных на способах обучения. Этот выигрыш по точности имеет место, в частности, благодаря стадии 30 оптимизации, которая позволяет усилить взаимосвязь между радиосигнатурой и географическим положением, используя преимущество существования интересующих точек, в которых вероятность присутствия терминалов 70, 72 больше, чем в другом месте. Стадия 30 оптимизации также позволяет исключать несопоставимые элементы, которые не соответствуют интересующей точке и которые способствуют формированию "шума", ограничивающего характеристики алгоритма обучения.
Кроме того, устранение несопоставимых элементов способствует сокращению количества опорных элементов, используемых алгоритмом обучения, и, таким образом, снижению его сложности, что преобразуется в выигрыш с точки зрения времени вычисления и мощности вычислительных средств.
Кроме того, исключение несопоставимых элементов может способствовать уменьшению размера радиосигнатуры (то есть, количества измерений RSSI радиосигнатуры), рассматривая только базовые станции, которые располагаются около интересующих точек, что способствует еще большему снижению сложности алгоритма обучения.
Тот факт, что список интересующих точек для терминалов 70, 72 системы 60 известен, может также, по сути, представлять интерес, например, чтобы знать список складов, используемых при транспортировании товаров. Другое преимущество основано на возможности назначения весового коэффициента каждому опорному элементу в соответствии со временем, которое проходит с момента, когда сообщение было передано калибровочным терминалом 72, чтобы обогатить набор 26 опорных элементов. Конечно, это позволяет ускорить открытие новых интересующих точек и способствует забыванию относительно старых интересующих точек.
Таким образом, принятие в системе 60 беспроводной связи такого способа 10 геолокации, как тот, который был описан в качестве примера, не является особенно дорогостоящим. Действительно, способ не требует применения дополнительных специальных аппаратных средств на множестве терминалов 70 или базовых станциях 81 и при наличии нескольких специальных терминалов 72, оборудованных системой позиционирования в системе 60, способ позволяет полностью автоматизировать стадию 20 калибровки.
В целом, следует заметить, что рассмотренные выше варианты осуществления были описаны в виде примеров, не создающих ограничений, и что, следовательно, возможны другие альтернативы.
В частности, варианты осуществления этапа 32 идентификации интересующих точек и этапа 34 модификации набора 26 опорных элементов были приведены в качестве примера и в качестве альтернатив изобретения возможны и другие способы.
Изобретение было описано для ультраузкополосной системы 60 беспроводной связи, адаптированный для использования устройств типа IoT, но ничто не препятствует реализации способа 10 геолокации, соответствующего изобретению, для других типов систем связи, например, таких как сотовые сети GSM, UMTS, LTE, Wi-Fi и т.д.
Измерения, представляющие уровень качества линии беспроводной связи, используемой для формирования радиосигнатуры, могут выполняться базовыми станциями на восходящей линии беспроводной связи, а также терминалами на нисходящей линии беспроводной связи. Результаты измерений передаются, например, серверу, который затем выполняет другие этапы способа геолокации. В соответствии с другими примерами, измерения, представляющие уровень качества линии беспроводной связи, могут выполняться непосредственно сервером на основе информации, принимаемой от терминалов и/или от базовых станций.
Как указано выше, значение, представляющее качество линии беспроводной связи, может отличаться от уровня RSSI. Это может быть, например, уровень затухания сигнала, отношение сигнал-шум или другой показатель качества радиоканала.
В рассматриваемом примере опорный элемент соответствует географическому положению, полученному GPS-приемником калибровочного терминала 72, связанного с радиосигнатурой упомянутого калибровочного терминала 72 в упомянутом географическом положении. В конкретных вариантах осуществления набор 26 опорных элементов может далее непрерывно обогащаться опорными элементами, каждый из которых соответствует географическому положению интересующего терминала 70, оцененному на стадии поиска и связанному с радиосигнатурой упомянутого интересующего терминала 70, расположенного в этом положении.
Возможны, однако, и другие способы определения набора 26 опорных элементов. Например, географическое положение калибровочного терминала 72 может оцениваться на стадии калибровки традиционным способом геолокации, основанным на регрессивном алгоритме машинного обучения. В соответствии с другим примером, географическое положение калибровочного терминала 72 может быть оценено на стадии калибровки, используя другой способ геолокации, например, способ типа TDOA (сокращение "Time Difference Of Arrival", разницы во времени прибытия), основанный на результатах измерений времени распространения сигнала при обмене между терминалом и различными базовыми станциями.
На стадии поиска различные классификационные алгоритмы машинного обучения могут использоваться, чтобы оценить географическое положение интересующего терминала 70 на основе его радиосигнатуры и модифицированного набора 36 опорных элементов. Тот факт, что используется тот или другой из этих алгоритмов, просто констатирует альтернативный вариант осуществления изобретения.
Изобретение было описано, рассматривая область транспортирования товаров. Ничто, однако, не исключает рассмотрение других областей использования способа 10 геолокации, соответствующего изобретению, в конкретных областях, в которые терминалы, пригодные для геолокации, способны предпочтительно занимать определенные географические положения или проходить через определенные географические положения, через которые имеют тенденцию проходить большое количество терминалов 70 системы 60 (геолокация багажа в аэропортах, геолокация пакетов и т.д.).
В описанном примере интересующие точки идентифицируются динамически на основе опорных элементов, обеспечиваемых калибровочным терминалом 72. Ничто, однако, не препятствует, чтобы в конкретных вариантах осуществления все или часть интересующих точек были известны априорно и радиосигнатуры, связанные с этими интересующими точками, определялись, используя калибровочные устройства 71, которые могут преднамеренно перемещаться в упомянутые интересующие точки, известные заранее.
Реферат
Изобретение относится к области беспроводной связи. Техническим результатом является повышение точности геолокации терминала. Упомянутый технический результат достигается тем, что при помощи сообщений, передаваемых калибровочными терминалами (72) на стадии (20) калибровки, определяется набор (26) опорных элементов, каждый из которых содержит радиосигнатуру и географическое положение калибровочного терминала на момент, когда передается сообщение; стадия (30) оптимизации позволяет очищать и/или обогащать набор (26) опорных элементов посредством идентификации интересующих точек, соответствующих предпочтительным положениям передачи сообщений терминалами; на стадии (40) поиска положение интересующего терминала (70) определяется на основе его радиосигнатуры и модифицированного набора (36) опорных элементов. 2 н. и 13 з.п. ф-лы, 14 ил.

Формула
Документы, цитированные в отчёте о поиске
Система и способ генерирования информации о множестве точек интереса