Система предоставления позиционной информации, устройство и передатчик предоставления позиционной информации - RU2440590C2
Код документа: RU2440590C2
Чертежи







Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу, предназначенному для предоставления позиционной информации. Более конкретно, настоящее изобретение относится к способу, предназначенному для предоставления позиционной информации, даже в среде вне досягаемости сигнала, переданного из спутника, излучающего сигнал позиционирования.
УРОВЕНЬ ТЕХНИКИ
GPS (глобальная система позиционирования) известна в качестве традиционной системы позиционирования. Спутник (далее упоминаемый как “спутник GPS”), передающий сигнал, используемый для GPS (далее упоминаемый как «сигнал GPS»), летит на высоте, приблизительно 20000 км от земли. С помощью приема и демодуляции сигнала, излучаемого из спутника GPS, пользователь может измерять расстояние между спутником GPS и пользователем. Следовательно, если между землей и спутником GPS нет препятствия, возможно позиционирование с использованием сигнала, излучаемого из спутника GPS. Предположим, однако, использование GPS в городском районе. Часто может иметь место, что сигнал, излучаемый из спутника GPS, не может быть принят с помощью устройства предоставления позиционной информации пользователя, ввиду препятствий, создаваемых высокими зданиями, имеющимися в большом количестве. Кроме того, дифракция или отражение сигнала зданием может вызывать ошибку в измерении расстояния с использованием сигнала и в результате часто ухудшается точность позиционирования.
Несмотря на то, что известны способы приема в помещении слабого сигнала GPS, который прошел через стену или крышу, состояние приема является нестабильным, и точность позиционирования является низкой.
В дальнейшем в качестве примера описано позиционирование с использованием GPS. Однако явление, описанное выше, является общим вообще для систем позиционирования, использующих спутники. Спутниковая система позиционирования не ограничена GPS и может включать в себя системы, такие как GLONASS (глобальная навигационная спутниковая система) Российской Федерации или Европейская Galileo.
Способы, связанные с предоставлением позиционной информации, например, раскрыты в выложенной патентной заявке Японии №2006-67086 (патентный документ 1).
Патентный документ 1: выложенная патентная заявка Японии №2006-67086.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Проблемы, решаемые изобретением
Однако, в соответствии со способом, раскрытым в выложенной патентной заявке Японии №2006-67086, устройство чтения или устройство записи является уникальным для системы, предназначенной для предоставления позиционной информации, и испытывает недостаток универсальности. Для того чтобы предотвратить помехи, необходимо ограничить выходную мощность передачи и, следовательно, область, в которой позиционная информация является доступной для приема, является ограниченной, и трудно постоянно получать позиционную информацию. Кроме того, требуется большое число передатчиков, чтобы охватить широкую область.
Кроме того, в связи со сбором или регистрацией позиционной информации можно определить местоположение источника передачи сигнала, если телефонный вызов произведен со стационарного телефона, так как местоположение стационарного телефона является известным заранее. Однако широко распространенное использование портативных телефонов делает мобильную связь все более и более распространенной, и становится все труднее регистрировать позиционную информацию звонящего абонента, в отличие от стационарного телефона. С другой стороны, что касается экстренного вызова, законодательство приняло во внимание включить позиционную информацию в вызов из портативного телефона.
Традиционный портативный телефон, имеющий функцию позиционирования, получает позиционную информацию, если сигнал из спутника является доступным для приема, и, следовательно, можно зарегистрировать позицию портативного телефона. Однако там, где невозможно принять радиосигналы, например в подземном месте для гулянья или внутри помещения, позиционная информация не может быть получена с помощью традиционного способа позиционирования.
Ввиду вышеизложенного, может быть рассмотрен способ, в котором множество передатчиков, которые могут излучать сигналы, подобные сигналу GPS, расположены внутри помещения, чтобы находить позицию на основании принципа трилатерации, подобного GPS. Однако такой подход требует, чтобы передатчики были синхронизированы во времени, при этом увеличивается стоимость передатчиков.
Кроме того, отражение внутри помещения и тому подобное делает трудным распространение радиосигналов, в результате легко давая ошибки приблизительно 10 м.
Настоящее изобретение было создано, чтобы решить вышеописанную проблему, и его задачей является предоставить систему предоставления позиционной информации, предоставляющую позиционную информацию без потери точности, даже в месте вне досягаемости радиосигналов из спутника, излучающего сигнал позиционирования.
Другой задачей является предоставить систему предоставления позиционной информации, предоставляющую позиционную информацию на основании сигнала, который не требует синхронизации во времени со спутником, излучающим сигнал позиционирования.
Дополнительной задачей является предоставить устройство предоставления позиционной информации, которое может предоставлять позиционную информацию без потери точности, даже в месте вне досягаемости радиосигналов из спутника, излучающего сигнал позиционирования.
Еще дополнительной задачей является предоставить устройство предоставления позиционной информации, которое может предоставлять позиционную информацию на основании сигнала, который не требует синхронизации во времени со спутником, излучающим сигнал позиционирования.
Еще дополнительной задачей является предоставить передатчик, который может передавать сигнал, предоставляющий позиционную информацию без потери точности, даже в месте вне досягаемости радиосигналов из спутника, излучающего сигнал позиционирования.
Еще дополнительной задачей является предоставить передатчик, который может передавать сигнал, предоставляющий позиционную информацию на основании сигнала, который не требует синхронизации во времени со спутником, излучающим сигнал позиционирования.
Средства, предназначенные для решения проблем
Для того чтобы решить вышеописанные проблемы, в соответствии с одним аспектом, настоящее изобретение предоставляет систему предоставления позиционной информации, предназначенную для предоставления позиционной информации. Система включает в себя передатчик. Передатчик включает в себя блок памяти, хранящий позиционные данные, предназначенные для определения местоположения, где установлен передатчик, блок генерации, генерирующий первый сигнал позиционирования, имеющий позиционные данные, как сигнал расширенного спектра, и блок передачи, передающий сигнал расширенного спектра. Система предоставления позиционной информации дополнительно включает в себя устройство предоставления позиционной информации. Устройство предоставления позиционной информации включает в себя блок приема, принимающий сигнал расширенного спектра, блок памяти, хранящий шаблон кода, связанный с первым сигналом позиционирования, блок специфицирования, специфицирующий на основании шаблона кода, сохраненного в устройстве памяти, шаблон кода, который соответствует сигналу расширенного спектра, принятому с помощью блока приема, блок определения, определяющий, принят ли первый сигнал позиционирования или нет, на основании сигнала, демодулированного с использованием шаблона кода, специфицированного с помощью блока специфицирования, блок получения, получающий позиционные данные из демодулированного сигнала, когда принят первый сигнал позиционирования, и блок вывода, выводящий позиционный сигнал, полученный блоком получения.
Предпочтительно первый сигнал позиционирования имеет тот же формат, что и формат второго сигнала позиционирования, излучаемого спутником, передающим сигнал для позиционирования, и включает в себя позиционные данные вместо сообщения навигации, включенного во второй сигнал позиционирования. Устройство предоставления позиционной информации дополнительно сохраняет в блоке памяти шаблон кода каждого из вторых сигналов позиционирования. Устройство памяти информации позиционирования дополнительно включает в себя блок вычисления, вычисляющий позицию устройства предоставления позиционной информации на основании каждого сообщения навигации, когда принимается множество вторых сигналов позиционирования.
Предпочтительно закодированный позиционный сигнал имеет центральную частоту, равную 1574,42 MHz. Расширение частоты сигнала позиционирования составляет 1,023 MHz.
В соответствии с другим аспектом настоящее изобретение предоставляет устройство предоставления позиционной информации, предназначенное для предоставления позиционной информации. Устройство включает в себя блок приема, принимающий сигнал расширенного спектра, и блок памяти, хранящий шаблон кода, связанный с первым сигналом позиционирования. Первый сигнал позиционирования излучается из передатчика, установленного в местоположении, точно определенном заранее, и включает в себя позиционные данные для точного определения местоположения. Устройство включает в себя блок специфицирования, предназначенный для специфицирования на основании шаблона кода, сохраненного в блоке памяти, шаблона кода, соответствующего сигналу расширенного спектра, принятому блоком приема, блок определения, определяющий на основании сигнала, демодулированного с использованием шаблона кода, специфицированного блоком специфицирования, принят ли первый сигнал позиционирования, блок получения, получающий, когда принят первый сигнал позиционирования, позиционные данные из демодулированного сигнала, и блок вывода, выводящий позиционный сигнал, полученный блоком получения.
Предпочтительно первый сигнал позиционирования имеет тот же формат, что и формат второго сигнала позиционирования, излучаемого спутником, передающим сигнал для позиционирования, и включает в себя позиционные данные вместо сообщения навигации, включенного во второй сигнал позиционирования. Устройство предоставления позиционной информации дополнительно хранит в блоке памяти шаблон кода каждого из вторых сигналов позиционирования, излучаемых множеством спутников. Блок памяти информации позиционирования дополнительно включает в себя блок вычисления, вычисляющее позицию устройство предоставления позиционной информации на основании каждого сообщения навигации, когда принимается множество вторых сигналов позиционирования. Шаблон кода отличается от спутника к спутнику. Устройство предоставления информации позиционирования дополнительно включает в себя блок вычисления, вычисляющий позицию устройства предоставления позиционной информации на основании каждого сообщения навигации, когда принимается множество вторых сигналов позиционирования.
Предпочтительно блок приема принимает каждый из первых сигналов позиционирования, излучаемых из передатчиков, установленных в множестве местоположений, точно определенных заранее. Устройство предоставления позиционной информации дополнительно включает в себя блок обнаружения, определяющий интенсивность сигнала, принятого блоком приема. Блок получения специфицирует из первых сигналов позиционирования первый сигнал позиционирования, интенсивность которого является самой высокой, и получает позиционные данные, включенные в специфицированный первый сигнал позиционирования.
Предпочтительно позиционные данные включают в себя информацию, представляющую местоположение, в котором установлен передатчик. Блок вывода включает в себя блок отображения, отображающий местоположение, в котором установлен передатчик, на основании информации.
Предпочтительно позиционные данные включают в себя идентификационные данные, предназначенные для идентификации передатчика. Устройство включает в себя блок передачи, передающий, когда принят первый сигнал позиционирования, идентификационные данные и запрос передачи позиционной информации передатчика через линию связи на сервер, который предоставляет позиционную информацию в ответ на внешний запрос. Позиционная информация и идентификационные данные сохраняются во взаимосвязи друг с другом на сервере. Устройство дополнительно включает в себя блок ввода, принимающий ввод позиционной информации, переданной сервером в ответ на запрос передачи, через линию связи. Блок вывода включает в себя блок отображения, предназначенный для отображения позиционной информации.
Предпочтительно устройство предоставления позиционной информации включает в себя любое из следующих устройств: портативный телефон, портативный информационный терминал, портативное устройство позиционирования и система позиционирования, установленная на транспортном средстве.
Предпочтительно передатчик соединен с устройством тактового генератора, выводящим информацию времени. Выходные данные сигнала позиционирования из передатчика включают в себя данные времени, представляющие время, синхронизированное с временем устройства тактового генератора. Устройство предоставления позиционной информации дополнительно включает в себя блок тактового генератора, поддерживающий время и выводящий информацию времени, и блок калибровки, калибрующий время блока тактового генератора на основании данных времени, включенных в сигнал позиционирования, принятый блоком приема.
Предпочтительно устройство предоставления позиционной информации дополнительно включает в себя блок памяти, хранящий атрибутные данные, представляющие атрибут устройства предоставления позиционной информации, блок запроса, передающий запрос информации распределения в соответствии с атрибутными данными в устройство предоставления информации, которое может передавать информацию в соответствии с атрибутными данными на основании запроса, и блок ввода, принимающий ввод информации, переданной устройством предоставления информации на основании запроса распределения. Блок вывода включает в себя блок отображения, предназначенный для отображения информации.
В соответствии с еще одним дополнительным аспектом передатчик включает в себя блок памяти, хранящий позиционные данные, предназначенные для специфицирования местоположения, в котором установлен передатчик, блок генерации, генерирующий сигнал, имеющий позиционные данные, как сигнал расширенного спектра, и блок передачи, передающий сигнал расширенного спектра.
Предпочтительно блок генерации генерирует сигнал того же формата, что и формат сигнала позиционирования, излучаемого с помощью спутника, передающего сигнал для позиционирования, как сигнал расширенного спектра.
РЕЗУЛЬТАТЫ ИЗОБРЕТЕНИЯ
Система предоставления позиционной информации в соответствии с настоящим изобретением может предоставлять позиционную информацию с использованием сигнала, не синхронизированного во времени со спутником
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 изображает конфигурацию системы 10 предоставления позиционной информации в соответствии с первым вариантом осуществления настоящего изобретения.
Фиг.2 - блок-схема, изображающая конфигурацию аппаратного обеспечения передатчика 200-1, предназначенного для установки внутри помещения.
Фиг.3 - концептуальная схема, изображающая способ сохранения данных в EEPROM 240, обеспеченной в передатчике 200-1, предназначенном для установки внутри помещения.
Фиг.4 - блок-схема, изображающая конфигурацию аппаратного обеспечения устройства 100-1 предоставления позиционной информации.
Фиг.5 представляет сигналы позиционирования, передаваемые из передатчика.
Фиг.6 - блок-схема последовательности этапов, представляющая процедуру процесса, выполняемого с помощью устройства 100 предоставления позиционной информации.
Фиг.7 изображает отображение изображения на дисплее 440 устройства 100 предоставления позиционной информации.
Фиг.8 - первая схема, представляющая структуру сигнала в соответствии с другим аспектом первого варианта осуществления настоящего изобретения.
Фиг.9 - вторая схема, представляющая структуру сигнала в соответствии с другим аспектом первого варианта осуществления настоящего изобретения.
Фиг.10 - блок-схема, изображающая конфигурацию устройства 1000 предоставления позиционной информации в соответствии с модификацией первого варианта осуществления настоящего изобретения.
Фиг.11 изображает ситуацию, в которой используют устройство предоставления позиционной информации в соответствии с модификацией первого варианта осуществления настоящего изобретения.
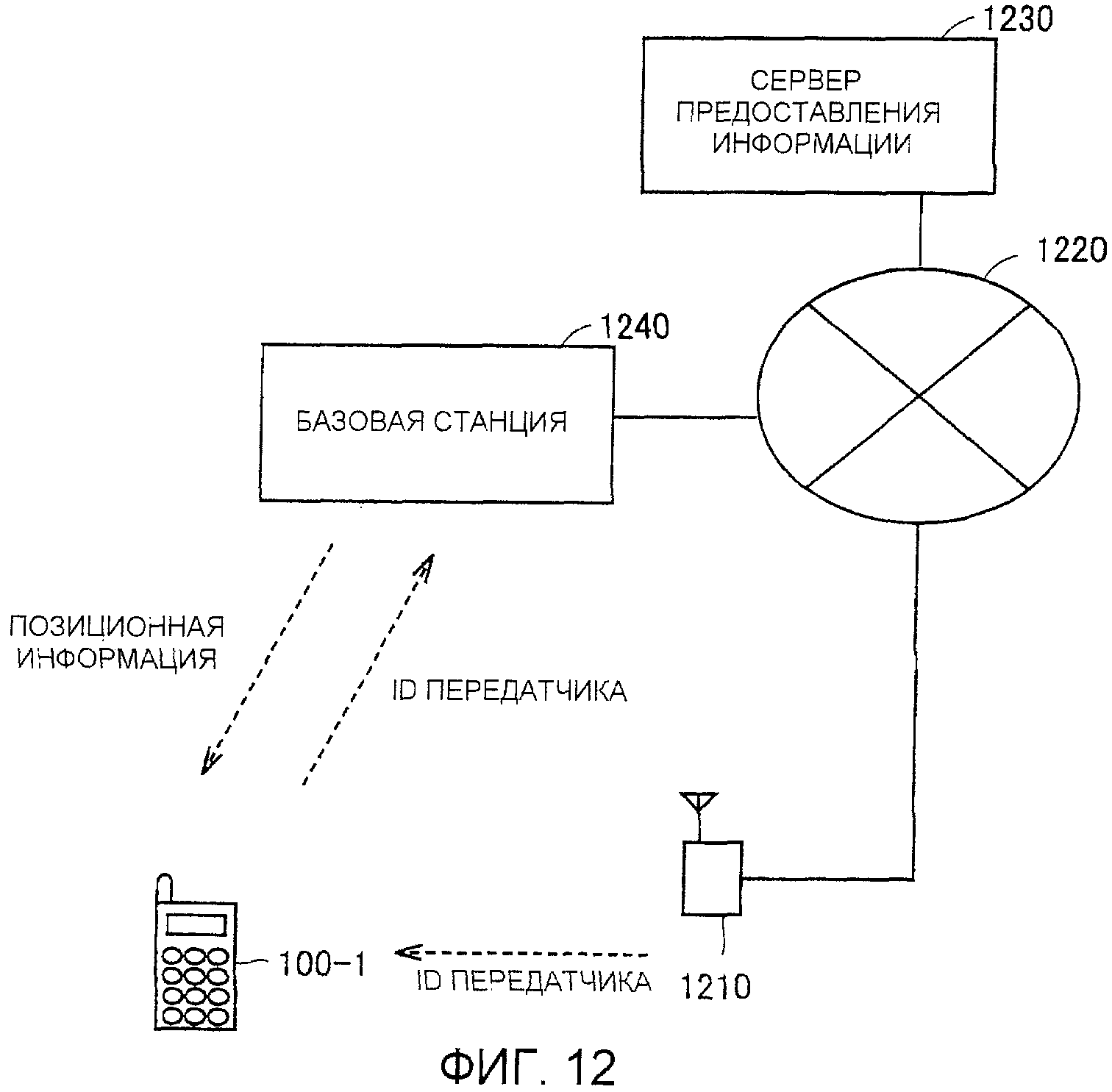
Фиг.12 изображает способ использования устройства предоставления позиционной информации в соответствии со вторым вариантом осуществления настоящего изобретения.
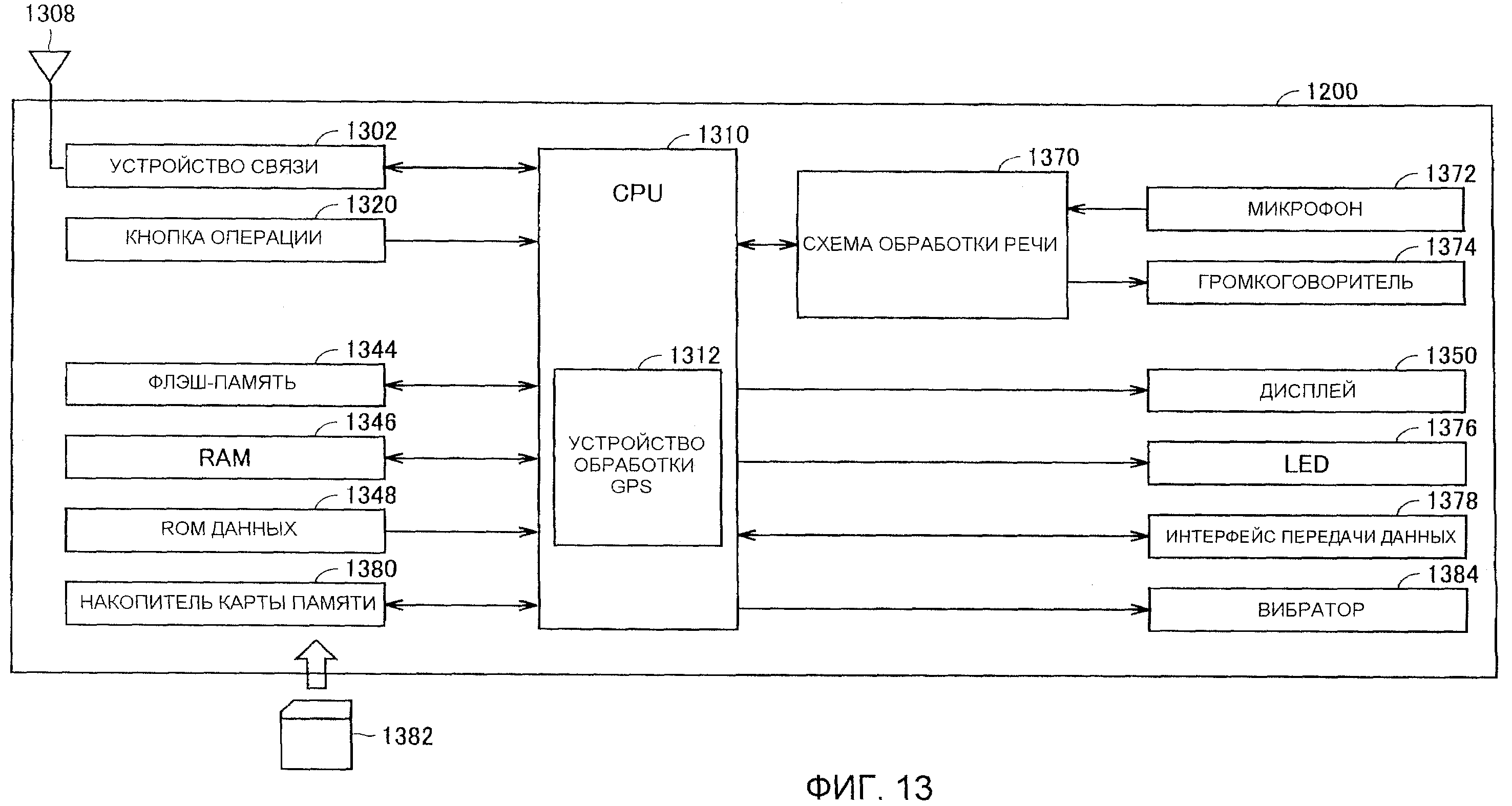
Фиг.13 - блок-схема, представляющая конфигурацию аппаратного обеспечения портативного телефона 1200 в соответствии с третьим вариантом осуществления настоящего изобретения.
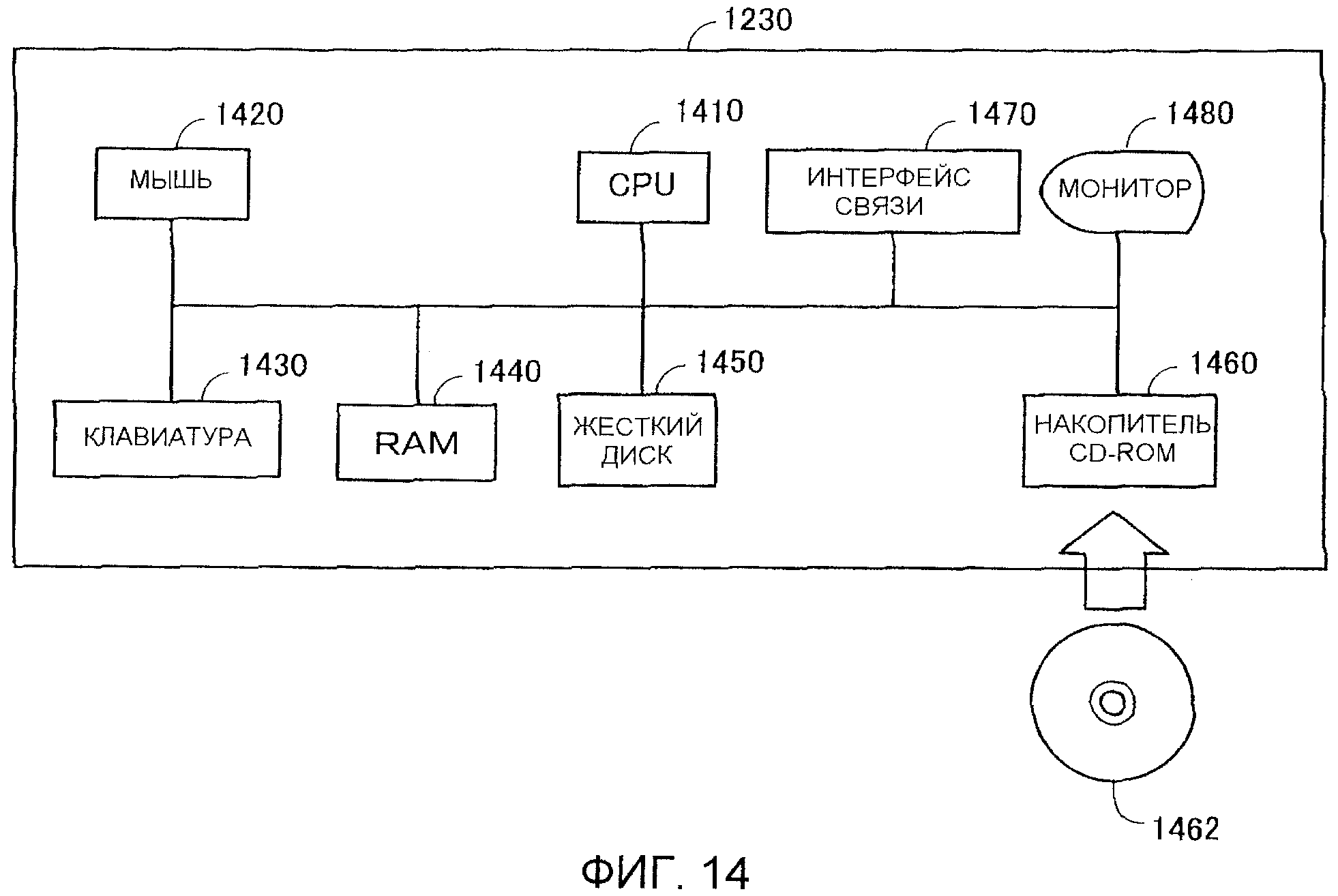
Фиг.14 - блок-схема, представляющая конфигурацию аппаратного обеспечения сервера 1230 предоставления информации в соответствии с третьим вариантом осуществления настоящего изобретения.
Фиг.15 - концептуальная схема, изображающая способ сохранения данных на жестком диске 1450 на сервере 1230 предоставления информации.
Описание ссылочных обозначений
10 - система предоставления позиционной информации, 110, 111, 112 - спутник GPS, 120, 121, 122 - передатчик, 100-1, 100-2, 100-3, 100-4, 1000, 1160, 1170 - устройство предоставления позиционной информации, 130 - здание, 200-1, 200-2, 200-3, 1110, 1120, 1130, 1210 - передатчик, предназначенный для установки внутри помещения, 1010, 1308 - антенна, 1140, 1150 - область, 1220 - Интернет, 1382 - карта памяти, 1462 - CD-ROM.
НАИЛУЧШИЕ СПОСОБЫ ДЛЯ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
В дальнейшем будут описаны варианты осуществления настоящего изобретения со ссылкой на чертежи. В дальнейшем описании одинаковые компоненты обозначены с помощью одинаковых ссылочных символов. Их названия и функции также являются одинаковыми. Следовательно, их подробное описание не будет повторено.
Первый вариант осуществления
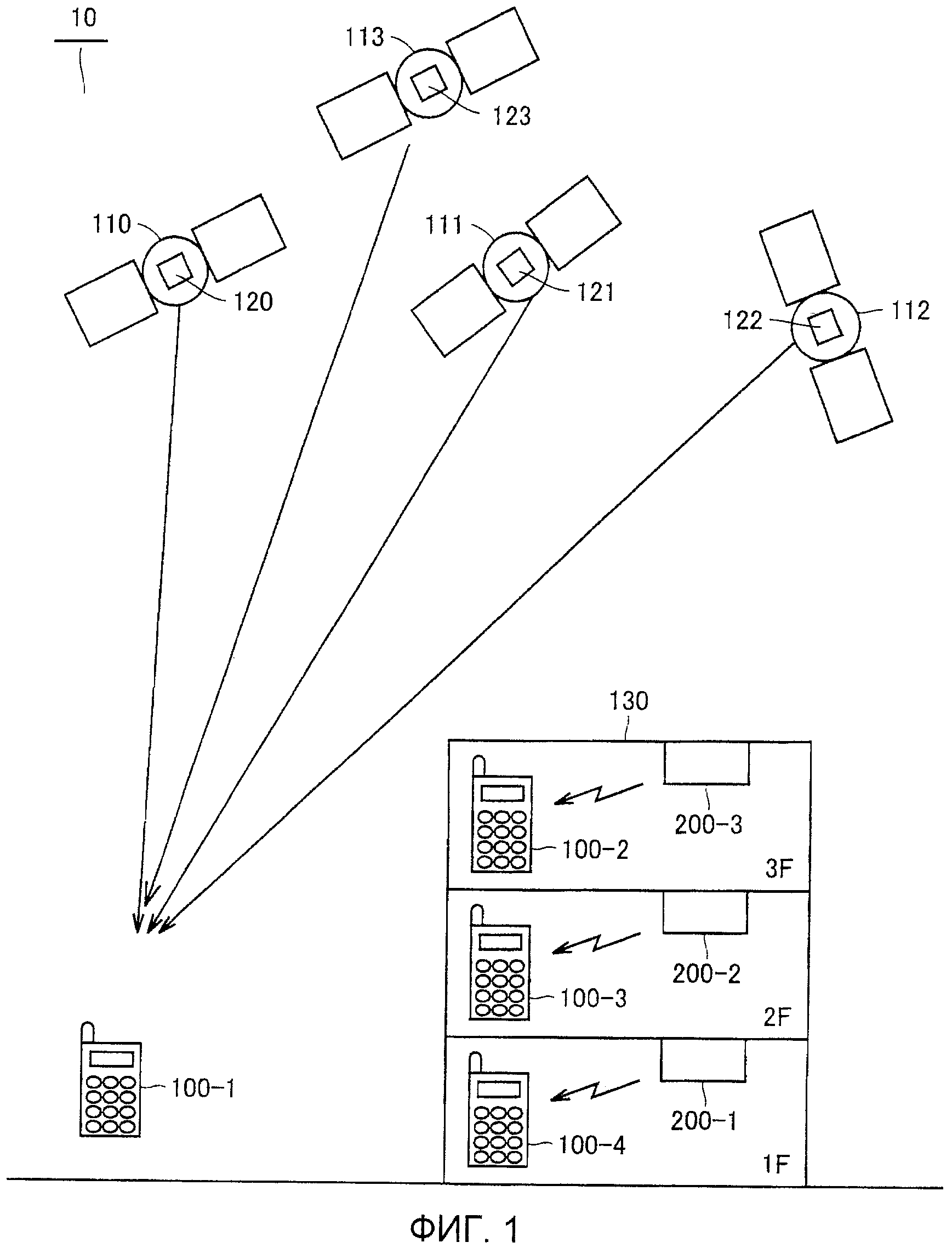
Ссылаясь на фиг.1, будет описана система 10 предоставления позиционной информации в соответствии с первым вариантом осуществления настоящего изобретения. Фиг.1 изображает конфигурацию системы 10 предоставления позиционной информации. Система 10 предоставления позиционной информации включает в себя спутники 110, 111, 112 и 113 GPS (глобальной системы позиционирования), летящие на высоте, равной 20000 м, над землей, излучающие сигналы, предназначенные для позиционирования (далее упомянутые как сигналы позиционирования), и устройства с 100-1 по 100-4 предоставления позиционной информации, действующие как устройства, предназначенные для предоставления позиционной информации. Устройства с 100-1 по 100-4 предоставления позиционной информации вообще будут упомянуты как устройство 100 предоставления позиционной информации. Устройство 100 предоставления позиционной информации, например, является терминалом, имеющим традиционное устройство позиционирования, таким как портативный телефон, автомобильная система навигации или другое подвижное устройство позиционирования.
В настоящем описании сигнал является так называемым сигналом расширенного спектра и, в качестве примера, он является так называемым сигналом GPS. Однако сигнал не ограничен сигналом GPS. В дальнейшем для простоты описания в качестве примера система позиционирования будет описана с использованием GPS. Настоящее изобретение также является применимым к другим спутниковым системам позиционирования (таким как Galileo и GLONASS).
Центральная частота сигнала позиционирования в качестве примера равна 1547,42 MHz. Расширение частоты сигнала позиционирования в качестве примера равно 1,023 MHz. В настоящем описании частота позиционирования становится такой же, как у сигнала С/А (грубый сбор данных и доступ) в диапазоне L1 существующей GPS. Это значит, что может быть использована существующая схема приема сигнала позиционирования (такая как схема приема сигнала GPS), и, следовательно, устройство 100 предоставления позиционной информации может принимать сигнал позиционирования без добавления любых новых схем.
Сигнал позиционирования может быть модулирован с помощью прямоугольного сигнала 1,023 MHz. В этом случае, если канал данных модулированного сигнала является тем же самым, что и канал данных сигнала позиционирования, запланированного для новой передачи в диапазоне L1, пользователь может принимать сигнал позиционирования с использованием приемника, который может принимать и обрабатывать новый сигнал GPS. Частоту модуляции определяют на основании компромисса со спектральным разделением для исключения взаимных помех демодулированного сигнала с сигналом С/А и/или другим сигналом.
Спутник 110 GPS имеет передатчик 120, установленный в нем, предназначенный для излучения сигнала позиционирования. Спутники 111, 112 и 113 GPS имеют подобные установленные передатчики 121, 122 и 123 соответственно. Устройства 100-2, 100-3 и 100-4 предоставления позиционной информации, имеющие подобные функции, что и устройство 100-1 предоставления позиционной информации, применяются в местах, где затруднен прием радиосигналов, таких как здание 130. На потолке первого этажа здания 130 прикреплен передатчик 200-1, предназначенный для установки внутри помещения. Устройство 100-4 предоставления позиционной информации принимает сигнал позиционирования, излучаемый из передатчика 200-1, предназначенного для установки внутри помещения. Подобным образом передатчики 200-2 и 200-3, предназначенные для установки внутри помещения, соответственно, прикреплены к потолкам второго и третьего этажей здания 130. В настоящем описании время каждого из передатчиков 200-1, 200-2 и 200-3, предназначенных для установки внутри помещения (далее упоминаемое как “земное время”) может быть независимым от времени спутников 110, 111, 112 и 113 GPS (далее упоминаемого как “спутниковое время”) и не требует быть синхронизированным. Желательно, чтобы спутники были синхронизированы во времени друг с другом.
Сигнал расширенного спектра, излучаемый как сигнал позиционирования из каждого передатчика, генерируется модуляцией сообщения навигации кодом PRN (псевдослучайного шума). Сообщение навигации включает в себя данные времени, информацию об орбите, справочник и данные ионосферной коррекции. Каждый передатчик 120 дополнительно имеет данные (PRN-ID (идентификации)), предназначенные для идентификации самого передатчика 120 или для идентификации спутника, на котором установлен передатчик 120.
Устройство 100 предоставления позиционной информации имеет данные, предназначенные для генерации каждого кода псевдослучайного шума, и генератор кода. Принимая сигнал позиционирования, устройство 100 предоставления позиционной информации выполняет процесс демодуляции, который будет описан позже, с использованием шаблона кода псевдослучайного шума, назначенного каждому спутнику, в соответствии с чем оно может идентифицировать, из какого спутника излучен принятый сигнал. Кроме того, новый сигнал GPS включает в себя PRN-ID в данных, следовательно, можно предотвратить обнаружение и отслеживание сигнала с использованием ошибочного шаблона кода, что является вероятным, когда уровень приема является низким.
Схематическая конфигурация передатчика, установленного на спутнике GPS, является следующей. Каждый из передатчиков 120, 121 и 122 включает в себя атомные часы, память, хранящую данные, схему генерации, схему обработки, предназначенную для генерации сигнала позиционирования, схему кодирования, предназначенную для кодирования расширенного спектра сигнала, генерируемого с помощью схемы обработки, и передающую антенну. Память хранит сообщение навигации, имеющее эфемериды, справочник каждого спутника, данные ионосферной коррекции и тому подобное, и PRN-ID.
Схема обработки генерирует сообщение для передачи с использованием информации времени из атомных часов и различных данных, сохраненных в памяти.
Следует заметить, что шаблон кода для кода псевдослучайного шума для кодирования расширенного спектра предварительно определен для каждого передатчика 120. Каждый шаблон кода отличается от передатчика к передатчику (то есть от спутника к спутнику GPS). Схема кодирования выполняет расширение спектра сообщения, по существу, с использованием кода псевдослучайного шума. Передатчик 120 преобразует таким образом закодированный сигнал на высокую частоту и излучает результирующий сигнал в пространство через передающую антенну.
Как описано выше, передатчик 120 излучает сигнал расширенного спектра, не вызывая вредных помех с другими передатчиками. В настоящем описании отсутствие “вредных помех” может быть гарантировано уровнем выходной мощности, ограниченным таким образом, чтобы предотвращать любые помехи. В качестве альтернативы, это может быть реализовано способом расширения спектра. Сигнал передается, например, с использованием сигнала несущей, упоминаемого как диапазон L1. Передатчики 120, 121 и 122 излучают сигналы позиционирования, имеющие одну и ту же частоту, например, в соответствии с системой связи расширенного спектра. Следовательно, когда сигналы позиционирования, переданные из соответствующих спутников, принимаются с помощью устройства 100-1 предоставления позиционной информации, соответствующие сигналы позиционирования могут быть приняты без перекрестных помех. Что касается сигналов позиционирования из передатчиков, предназначенных для установки внутри помещения, на земле, подобно сигналам, передаваемым из спутников, сигналы позиционирования из множества передатчиков, предназначенных для установки внутри помещения, могут быть приняты без перекрестных помех.
Ссылаясь на фиг.2, будет описан передатчик 200-1, предназначенный для установки внутри помещения. Фиг.2 является блок-схемой, представляющей конфигурацию аппаратного обеспечения передатчика 200-1, предназначенного для установки внутри помещения.
Передатчик 200-1, предназначенный для установки внутри помещения, включает в себя цифровой блок 210 обработки, EEPROM 240 (электрически стираемое и программируемое ПЗУ), электрически соединенное с цифровым блоком 210 обработки, UART 250, электрически соединенный с цифровым блоком 210 обработки, тактовый генератор 280, электрически соединенный с цифровым блоком 210 обработки, аналоговый блок 290 обработки, электрически соединенный с цифровым блоком 210 обработки, антенну 292, электрически соединенную с аналоговым блоком 290 обработки, и источник 294 питания. Цифровой блок 210 обработки включает в себя CPU (центральный процессор) 220 и RAM 230 (память с произвольным доступом).
EEPROM 240 хранит программу, выполняемую с помощью CPU 220, данные, представляющие местоположение, где установлен передатчик 200-1, предназначенный для установки внутри помещения, и т. д. Программа или данные считываются из EEPROM 240 и передаются в RAM 230, когда включается питание передатчика 200-1, предназначенного для установки внутри помещения. EEPROM 240 дополнительно может охранять данные, введенные извне передатчика 200-1, предназначенного для установки внутри помещения. Память, предназначенная для хранения программы или данных, не ограничена EEPROM 240. Может быть использована память, которая, по меньшей мере, может хранить данные энергонезависимым способом. Как будет описано позже, когда данные выводят извне, может быть использована любая память, которая дает возможность сохранения данных. Структура данных EEPROM 240 описана ниже.
Цифровой блок 210 обработки генерирует данные, как источник сигнала, передаваемого с помощью передатчика 200-1, предназначенного для установки внутри помещения, в качестве сигнала для позиционирования. Цифровой блок 210 обработки посылает сгенерированные данные как битовый поток в аналоговое устройство 290 обработки.
Тактовый генератор 280 подает тактовый сигнал, определяющий работу CPU 220, или тактовый сигнал, предназначенный для генерации сигнала несущей, в цифровой блок 210 обработки.
Цифровой интерфейс 260 ввода/вывода может осуществлять мониторинг внутреннего состояния (такого как сигнал “PLL Cntrl”) передатчика. В качестве альтернативы, цифровой интерфейс 260 ввода/вывода может принимать извне ввод шаблона кода псевдослучайного кода для модуляции расширения сигнала, излучаемого из передатчика 200-1, предназначенного для установки внутри помещения, или ввод данных, определяющих выходную мощность передачи. Кроме того, он может принимать ввод других данных, выдаваемых из передатчика 200-1, предназначенного для установки внутри помещения. Другие данные включают в себя текстовые данные, представляющие местоположение, в котором установлен передатчик 200-1, предназначенный для установки внутри помещения. Если передатчик 200-1, предназначенный для установки внутри помещения, установлен в коммерческих объектах, таких как универмаг, данные рекламы могут быть введены в передатчик 200-1, предназначенный для установки внутри помещения, как другие данные.
После ввода в передатчик 200-1, предназначенный для установки внутри помещения, шаблон кода псевдорасширенного кода записывается в предварительно определенной области EEPROM 240. После этого записанный PRN-ID включается в сигнал для позиционирования. Другие данные также записываются в областях, закрепленных заранее, в зависимости от типа данных, в EEPROM 240.
UART 250 используется для настройки передатчика 200-1, предназначенного для установки внутри помещения. Внешний тактовый генератор 270 используется для настройки передатчика 200-1, предназначенного для установки внутри помещения, подобно UART 250. В качестве примера, внешний тактовый генератор 270 используется для приема частоты линии питания (не изображена) и калибровки частоты передачи сигнала для позиционирования.
Аналоговый блок 290 обработки модулирует сигнал несущей 1,57542 GHz с использованием битового потока, выведенного из цифрового блока 210 обработки, чтобы сгенерировать сигнал передачи, и выводит его в антенну 292. Сигнал излучается из антенны 292. Таким образом, сигнал, имеющий такую же конфигурацию, что и конфигурация сигнала для позиционирования, излучается из передатчика 200-1, предназначенного для установки внутри помещения. В настоящем описании содержимое сигнала предпочтительно не является тем же самым, что и содержимое сигнала позиционирования, излучаемого из спутника. Пример конфигурации сигнала, излучаемого из передатчика 200-1, предназначенного для установки внутри помещения, описан ниже (фиг.5).
Источник 294 питания подает электрическое питание в различные компоненты передатчика 200-1, предназначенного для установки внутри помещения. Источник 294 питания может быть встроен в передатчик 200-1, предназначенный для установки внутри помещения, как изображено на фиг.2, или электрическое питание может быть подано извне.
В дальнейшем описании CPU 220 используется в качестве блока арифметической обработки, предназначенного для реализации процесса в цифровом блоке 210 обработки. Может быть использован другой блок арифметической обработки. Кроме того, так как операции, реализуемые в передатчике 200-1, предназначенном для установки внутри помещения, являются несложными, цифровой блок 210 обработки может быть осуществлен с помощью электрических схем, созданных с возможностью реализации различных процессов, вместо CPU 220.
Кроме того, хотя тактовый сигнал (Clk) подается из цифрового блока 210 обработки в аналоговый блок 290 обработки на фиг.2, он может быть непосредственно подан из тактового генератора 280 в аналоговый блок 290 обработки.
В настоящем варианте осуществления цифровой блок 210 обработки и аналоговый блок 290 обработки изображены отдельно для более понятного описания. Физически эти блоки могут быть установлены вместе в одной микросхеме.
Ссылаясь на фиг.3, будет описана структура данных в передатчике 200-1, предназначенном для установки внутри помещения. Фиг.3 является концептуальной иллюстрацией, изображающей способ сохранения данных в EEPROM 240, обеспеченный в передатчике 200-1, предназначенном для установки внутри помещения. EEPROM 240 включает в себя области с 310 по 340 для хранения данных.
Область 300 сохраняет переданный ID как число для идентификации передатчика. Переданный ID, например, является цифрами и/или буквами или другой комбинацией, записанной энергонезависимым способом в памяти, при изготовлении передатчика. PRN-ID псевдорасширенного кода, выделенного передатчику, сохраняется в области 310. Имя передатчика сохраняется как текстовые данные в области 320.
Шаблон кода псевдорасширенного кода, выделенного передатчику, сохраняется в области 330. Шаблон кода псевдорасширенного кода выбирается из множества конечного числа шаблонов кодов, выделенных заранее для системы предоставления позиционной информации, в соответствии с вариантом осуществления настоящего изобретения, и он является шаблоном кода, отличным от шаблона кода псевдорасширенного кода, выделенного каждому спутнику. Кроме того, как описано выше, шаблон кода псевдорасширенного кода может изменяться на другой шаблон кода, введенный через цифровой интерфейс 260 ввода/вывода.
Шаблон кода псевдорасширенного кода, выделенный для настоящей системы предоставления позиционной информации, является конечным числом. Число передатчиков, предназначенных для установки внутри помещения, является разным в зависимости от места установки (например, номера этажа здания). Множество передатчиков, предназначенных для установки внутри помещения, численно больше, чем число шаблонов кода, которые, возможно, могут быть использованы. Следовательно, может быть множество передатчиков, имеющих один и тот же шаблон кода псевдорасширенного кода. В этом случае место установки передатчиков, имеющих один и тот же шаблон кода, может быть определено с учетом выходной мощности сигнала. Это предотвращает одновременный прием множества сигналов позиционирования с использованием одного и того же шаблона кода псевдорасширенного кода с помощью одного и того же устройства предоставления позиционной информации.
Позиционные данные, предназначенные для определения местоположения, в котором установлен передатчик 200-1, предназначенный для установки внутри помещения, сохраняются в области 340. Позиционные данные в качестве примера представлены как комбинация широты, долготы и высоты. В области 320, дополнительно или вместо позиционных данных, может быть сохранен адрес или название здания.
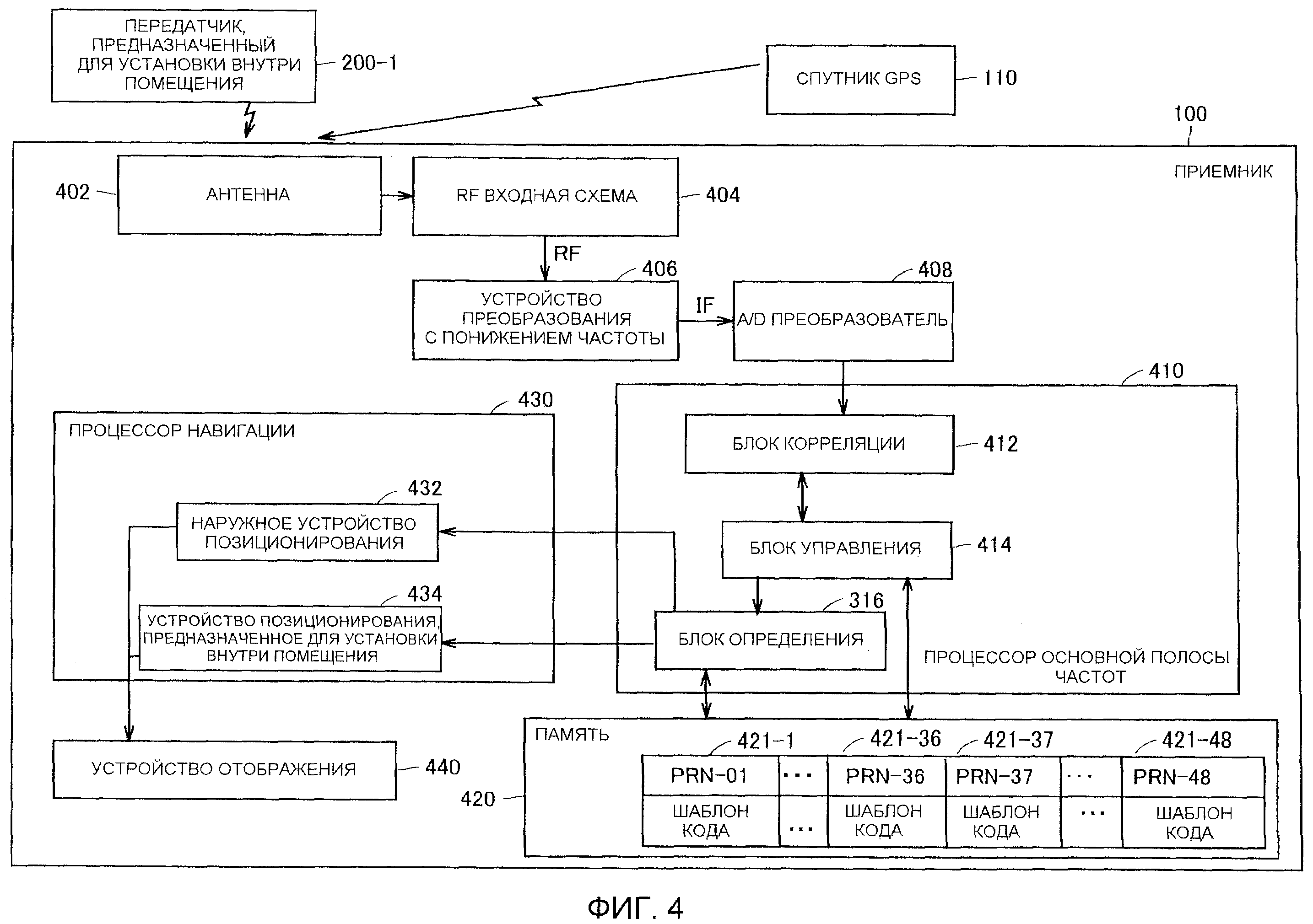
Ссылаясь на фиг.4, будет описано устройство 100-1 предоставления позиционной информации. Фиг.4 является блок-схемой, представляющей конфигурацию аппаратного обеспечения устройства 100-1 предоставления позиционной информации.
Устройство 100 предоставления позиционной информации включает в себя антенну 402, RF (радиочастотную) входную схему 404, электрически соединенную с антенной 402, устройство 406 преобразования с понижением частоты, электрически соединенное с RF входной схемой 404, A/D (аналого-цифровой) преобразователь 408, электрически соединенный с устройством 406 преобразования с понижением частоты, процессор 410 основной полосы частот, электрически соединенный с A/D преобразователем 408, память 420, электрически соединенную с процессором 410 основной полосы частот, процессор 430 навигации, электрически соединенный с процессором 410 основной полосы частот, и дисплей 440, электрически соединенный с процессором 430 навигации.
Память 420 включает в себя множество областей, предназначенных для хранения шаблонов кода псевдошумовых кодов в качестве данных, предназначенных для идентификации каждого источника излучения сигнала позиционирования. В качестве примера, в соответствии с одним аспектом, когда используется 48 шаблонов кода, память 420 включает в себя области с 421-1 по 421-8, как изображено на фиг.4. В соответствии с другим аспектом, когда используется большее число шаблонов кода, большее число областей обеспечивается в памяти 420. Наоборот, также возможно, что используется меньше шаблонов кода, чем число областей, обеспеченных в памяти 420.
Рассмотрим пример, в котором используют 48 шаблонов кода. В данном примере, если для спутниковой системы позиционирования используется 24 спутника, 24 идентификационных данных, предназначенных для идентификации соответственных спутников, и 12 запасных данных сохраняются в областях с 421-1 по 421-36. В данном примере, например, в области 421-1 сохранен шаблон кода кода псевдошума для первого спутника. С помощью считывания из этой области шаблона кода и выполнения процесса взаимной корреляции с принятым сигналом становится возможным отслеживание и дешифрование сообщения навигации, включенного в сигнал. Хотя способ, в котором сохраняется и считывается шаблон кода, описан в настоящей заявке в качестве примера, также возможен способ, в котором шаблон кода генерируется генератором шаблона кода. Например, генератор шаблона кода реализуется объединением двух регистров обратной связи. Структура и работа генератора шаблона кода без труда понятна специалисту в данной области техники, поэтому его подробное описание не приводится.
Подобным образом шаблоны кодов кода псевдошума, выделенные передатчикам, предназначенным для установки внутри помещения, излучающим сигналы позиционирования, сохранены в областях с 421-37 по 421-48. Например, шаблон кода псевдошума, выделенного первому передатчику, предназначенному для установки внутри помещения, сохранен в области 432-37. В настоящем варианте осуществления используются передатчики, предназначенные для установки внутри помещения, имеющие 12 шаблонов кода. В настоящем примере передатчики, предназначенные для установки внутри помещения, могут быть расположены таким образом, что передатчики, предназначенные для установки внутри помещения, имеющие один и тот же шаблон кода, не размещаются в пределах зоны обслуживания одного устройства предоставления позиционной информации. При таком расположении становится возможным установить больше 12 передатчиков, предназначенных для установки внутри помещения, на одном этаже здания 130.
Процессор 410 основной полосы частот включает в себя блок 412 корреляции, принимающий в качестве входа сигнал, выведенный из А/D преобразователя 408, блок 414 управления, управляющий работой устройства 412 корреляции, и блок 416 определения, определяющий источник излучения сигнала позиционирования на основании данных, выведенных из блока 414 управления. Процессор 430 навигации включает в себя блок 434 наружного позиционирования, предназначенный для измерения наружной позиции устройства 100 предоставления позиционной информации на основании сигнала, выведенного из блока 416 определения, и блок 434 внутреннего позиционирования, предназначенный для извлечения информации, представляющей внутреннюю позицию устройства 100 предоставления позиционной информации на основании данных, выведенных из блока 416 определения.
Антенна 402 может принимать сигналы позиционирования, излучаемые со спутников 110, 111 и 112 GPS, соответственно, и сигнал позиционирования, излучаемый из передатчика 200-1, предназначенного для установки внутри помещения. Кроме того, когда устройство 100 предоставления позиционной информации осуществлено как портативный телефон, антенна 420 может передавать/принимать сигнал для беспроводного телефона или данные, предназначенные для передачи данных, кроме сигналов, упомянутых выше.
RF входная схема 404 принимает сигналы, принятые с помощью антенны 402, и выполняет уменьшение шума или процесс фильтрации для вывода сигналов только в предварительно определенной полосе частот. Сигнал, выведенный из RF входной схемы, вводят в устройство 406 преобразования с понижением частоты.
Устройство 406 преобразования с понижением частоты усиливает сигнал, выведенный из RF входной схемы 404, и выводит его в как сигнал промежуточной частоты. Этот сигнал вводится в A/D преобразователь 408. A/D преобразователь 408 выполняет цифровое преобразование введенного сигнала промежуточной частоты в цифровой сигнал. Цифровой сигнал вводится в процессор 410 основной полосы частот.
В процессоре 410 основной полосы частот блок 412 корреляции выполняет процесс корреляции между принятым сигналом шаблоном кода, считанным блоком 414 управления из памяти 420. Например, блок 412 корреляции выполняет сравнение двух разных шаблонов кода, фаза кода которых отличается на 1 бит, предоставленных с помощью схемы 414 управления, с цифровыми данными, переданными из A/D преобразователя 408. Используя каждый шаблон кода, блок 412 корреляции отслеживает сигнал позиционирования, принятый с помощью устройства 100 предоставления позиционной информации, и определяет шаблон кода, который имеет последовательность, совпадающую с последовательностью бит сигнала позиционирования. В результате определяется шаблон кода псевдошума и, следовательно, устройство 100 предоставления позиционной информации может определить, из какого спутника или из какого передатчика, предназначенного для установки внутри помещения, передан сигнал позиционирования. Кроме того, возможно, чтобы устройство 100 предоставления позиционной информации демодулировало и расшифровывало сообщение с использованием определенного шаблона кода.
В частности, блок 416 определения выполняет такое определение, как описано выше, и передает данные в соответствии с результатом определения в процессор 430 навигации. Блок 416 определения определяет, является ли PRN-ID, включенный в принятый сигнал позиционирования, PRN-ID, выделенным передатчику, отличному от передатчика, установленного на спутнике GPS.
В настоящем описании будет описан пример, в котором в системе позиционирования использованы 24 спутника GPS. В настоящем примере использованы 36 кодов псевдошума, включая запасные коды. В этом примере с PRN-01 по PRN-24 использованы в качестве номеров (PRN-ID), предназначенных для идентификации соответствующих спутников, а с PRN-25 по PRN-36 использованы в качестве номеров (PRN-ID), предназначенных для идентификации запасных спутников. Запасной спутник относится к спутнику, запущенному дополнительно к первоначально запущенным спутникам. В частности, такой спутник может быть запущен в случае, когда выходит из строя спутник GPS, или передатчик, или тому подобное устройство, установленное в GPS.
Кроме того, предполагается, что передатчикам, отличным от передатчиков, установленных на спутниках GPS, назначены 12 шаблонов кода псевдошума (таким как передатчик 200-1, предназначенный для установки внутри помещения и тому подобные). В настоящем примере номера, отличные от PRN-ID, выделенные спутникам, например с PRN-37 по PRN-48, выделены соответствующим передатчикам. Поэтому из этого следует, что в настоящем примере имеется 48 PRN-ID. В настоящем примере с PRN-37 по PRN-48 выделены передатчикам, предназначенным для установки внутри помещения в соответствии с расположением передатчиков, предназначенных для установки внутри помещения. Следовательно, если использованная выходная мощность передачи является недостаточно высокой, чтобы вызывать помехи сигналов, излученных из каждого передатчика, предназначенного для установки внутри помещения, для разных передатчиков, предназначенных для установки внутри помещения, может быть использован один и тот же PRN-ID. Это расположение дает возможность использования большего числа передатчиков, чем PRN-ID, выделенные для передатчиков на земле.
Следовательно, блок 416 определения обращается к шаблону 422 кода кода псевдошума, сохраненного в памяти 420, чтобы определить, соответствует ли шаблон кода, полученный из принятого сигнала позиционирования, шаблону кода, выделенному передатчику, предназначенному для установки внутри помещения. Если эти шаблоны кода совпадают, блок 416 определения определяет, что сигнал позиционирования излучен из передатчика, предназначенного для установки внутри помещения. В противном случае блок 416 определения определяет, что сигнал излучен из спутника GPS, и определяет, обращаясь к шаблонам кода, сохраненным в памяти 402, какому спутнику GPS выделен полученный шаблон кода. Хотя описан пример, в котором для определения использован шаблон кода, определение может быть выполнено с помощью сравнения других данных. Например, для определения может быть использовано сравнение с использованием PRN-ID.
Если принятый сигнал излучен из каждого спутника GPS, блок 416 определения передает данные, полученные из специфицированного сигнала, в блок 432 наружного позиционирования. Данные, полученные из сигнала, включают в себя данные навигации. Если принятый сигнал излучен из передатчика 200-1, предназначенного для установки внутри помещения, или тому подобного, блок 416 определения передает данные, полученные из сигнала, в блок 434 внутреннего позиционирования. Данные представляют значения координат, установленные заранее, как данные для специфицирования позиции передатчика 200-1, предназначенного для установки внутри помещения. В соответствии с другим аспектом может быть использован номер, идентифицирующий передатчик.
В процессоре 430 навигации блок 432 наружного позиционирования выполняет процесс, предназначенный для вычисления позиции устройства 100 предоставления позиционной информации на основании данных, переданных из блока 416 определения. В частности, используя данные, включенные в сигналы, излученные из трех или более (предпочтительно четырех или более) спутников GPS, блок 432 наружного позиционирования вычисляет время распространения каждого сигнала и на основании результата вычисления находит позицию устройства 100 предоставления позиционной информации. Процесс выполняют с помощью известного способа спутникового позиционирования. Процесс может быть без труда понятен специалисту в данной области техники и поэтому его подробное описание не приводится.
С другой стороны, в процессоре 430 навигации блок 434 внутреннего позиционирования выполняет процесс позиционирования, когда устройство 100 предоставления позиционной информации имеется внутри помещения, на основании данных, выведенных из блока 416 определения. Как описано ниже, передатчик 200-1, предназначенный для установки внутри помещения, излучает сигнал позиционирования, включающий в себя данные (данные времени), предназначенные для специфицирования местоположения. Следовательно, если устройство 100 предоставления позиционной информации принимает такой сигнал, данные могут быть извлечены из сигнала, и данные могут быть использованы как позиция устройства 100 предоставления позиционной информации. Этот процесс выполняет блок 434 внутреннего позиционирования. Данные, вычисленные с помощью блока 432 наружного позиционирования или с помощью блока 434 внутреннего позиционирования, используются для отображения на устройстве отображения 440. В частности, данные включены в данные, предназначенные для отображения изображения, и изображение, представляющее измеренную позицию, или отображающее местоположение, в котором установлен передатчик 200-1, предназначенный для установки внутри помещения, генерируется и отображается на устройстве 440 отображения.
Ссылаясь на фиг.5, ниже описан сигнал позиционирования, передаваемый из передатчика. Фиг.5 изображает структуру сигнала 500, излучаемого с помощью передатчика, установленного на спутнике GPS. Сигнал 500 образован из пяти подкадров, равных 300 бит, то есть подкадров с 510 по 550. Подкадры с 510 по 550 многократно передают с помощью передатчика. Каждый из подкадров с 510 по 550 включает в себя 300 бит и передается со скоростью передачи бит, равной 50 бит в секунду. Следовательно, в этом примере, каждый подкадр передают через 6 секунд.
Первый подкадр 510 включает в себя транспортные издержки 511, равные 30 бит, информацию 512 времени, равную 30 бит, и данные 513 сообщения, равные 240 бит. В частности, информация 512 времени включает в себя информацию времени, полученную, когда генерируется подкадр 510, и ID подкадра. В настоящем примере ID подкадра представляет идентификационный номер, предназначенный для различения первого подкадра 510 от других подкадров. Данные 513 сообщения включают в себя число недели GPS, информацию синхронизации, информацию о состоянии спутника GPS и информацию о точности орбиты.
Второй подкадр 520 включает в себя транспортные издержки 521, равные 30 бит, информацию 522 времени, равную 30 бит, и данные 523 сообщения, равные 240 бит. Информация 522 времени имеет такую же структуру, что и информация 512 времени первого подкадра 510. Данные 523 сообщения включают в себя эфемериды. Здесь эфемериды (широковещательно передаваемые эфемериды) представляют информацию об орбите спутника, излучающего сигнал позиционирования. Эфемериды являются высокоточной информацией, последовательно обновляемой станцией управления, следящей за спутниковой навигацией.
Третий подкадр 530 имеет ту же самую структуру, что и структура второго подкадра 520. В частности, третий подкадр 530 включает в себя транспортные издержки 531, равные 30 бит, информацию 532 времени, равную 30 бит, и данные 533 сообщения, равные 240 бит. Информация 532 времени имеет такую же структуру, что и информация 512 времени первого подкадра 510. Данные 533 сообщения включают в себя эфемериды.
Четвертый подкадр 540 включает в себя транспортные издержки 541, равные 30 бит, информацию 542 времени, равную 30 бит, и данные 543 сообщения, равные 240 бит. В отличие от других данных 513, 523 и 533 данные 543 сообщения включают в себя информацию справочника, сводку информации о состоянии спутника, информацию ионосферной задержки, параметр UTC (координированное универсальное время) и тому подобное.
Пятый подкадр 550 включает в себя транспортные издержки 551, равные 30 бит, информацию 552 времени, равную 30 бит, и данные 553 сообщения, равные 240 бит. Данные 553 сообщения включают в себя информацию справочника и сводку информации о состоянии спутника. Каждые из данных 543 и 553 сообщения состоят из 25 страниц, и в каждой странице определены разные порции информации, описанные выше. В настоящем примере информация справочника представляет схематическую орбиту спутников и включает в себя не только информацию о соответствующем спутнике, но также информацию обо всех спутниках GPS. Когда передача подкадров с 510 по 550 повторена 25 раз, процесс возвращается на первую страницу, и повторно начинается выдача тех же самых порций информации.
Подкадры с 510 по 550 передаются из каждого из передатчиков 120, 121 и 122. Когда подкадры с 510 по 550 приняты устройством 100 предоставления позиционной информации, позиция устройства 100 предоставления позиционной информации вычисляется на основании каждой порции информации поддержания/управления, включенной в транспортные издержки с 511 по 551, информации с 512 по 552 времени и данных с 513 по 533 сообщения.
Сигнал 560 имеет ту же длительность сигнала, что и каждые из данных с 513 по 553 сообщения, включенных в подкадры с 510 по 550. Сигнал 560 отличается от подкадров с 510 по 550 тем, что вместо информации об орбите, представленной как эфемериды (данные 523, 533 сообщения), он имеет данные, представляющие позицию источника излучения сигнала 560.
В частности, сигнал 560 включает в себя PRN-ID 561, равный 6 бит, ID 562 передатчика, равный 15 бит, значение 563 координаты Х, значение 564 координаты Y, значение 565 координаты Z, коэффициент коррекции высоты (Zhf) 566, адрес 567 и резерв 568. Сигнал 560 передается из передатчиков 200-1, 200-2 и 200-3, предназначенных для установки внутри помещения, вместо данных с 513 по 533 сообщения, включенных в подкадры с 510 по 550.
PRN-ID 561 является идентификационным номером шаблонов кодов группы кодов псевдошума, выделенных заранее передатчикам (например, передатчикам 200-1, 200-2 и 200-3, предназначенным для установки внутри помещения), как источникам излучения сигнала 560. Хотя PRN-ID 561 отличается от идентификационного номера шаблонов кодов группы кодов псевдошума, выделенных соответствующим передатчикам, установленным на спутниках GPS, имеются номера, выделенные шаблонам кодов, сгенерированных из кодовой последовательности той же самой системы. Когда устройство предоставления позиционной информации получает любой из шаблонов кодов псевдошума, выделенных передатчикам, предназначенным для установки внутри помещения, из принятого сигнала 560, становится возможным точно определить, соответствует ли сигнал подкадру с 510 по 550, переданному из спутника, или сигналу 560, переданному из передатчика, предназначенного для установки внутри помещения.
Значение 563 координаты Х, значение 564 координаты Y и значение 565 координаты Z являются данными, представляющими позицию, в которой установлен передатчик 200-1, предназначенный для установки внутри помещения. В качестве примера, значение 563 координаты Х, значение 564 координаты Y и значение 565 координаты Z указывает широту, долготу и высоту соответственно. Коэффициент 566 коррекции высоты используется для коррекции высоты, определенной с помощью значения 565 координаты Х. Коэффициент 566 коррекции высоты не является существенным элементом данных. Следовательно, если точность выше, чем высота, определенная с помощью значения 565 координаты Z, не нужна, то коэффициент может не использоваться. В этом случае, например, данные “ноль” сохраняются в области, назначенной для коэффициента 566 коррекции высоты.
Ссылаясь на фиг.6, ниже описана структура управления устройством 100 предоставления позиционной информации. Фиг.6 является блок-схемой последовательности этапов, представляющей процедуру процесса, выполняемого процессором 410 основной полосы частот и процессором 430 навигации устройства 100 предоставления позиционной информации.
На этапе S610 устройство 100 предоставления позиционной информации получает (отслеживает и получает) сигнал позиционирования. В частности, процессор 410 основной полосы частот принимает в качестве входа принятый позиционный сигнал (данные, преобразованные в цифровой вид) из A/D преобразователя 408. Процессор 410 основной полосы частот генерирует в качестве копии кода псевдошума шаблон кода, фаза кода которого отличается, возможно, на задержку отражения и обнаруживает наличие/отсутствие корреляции между шаблоном кода и принятым сигналом позиционирования. Число сгенерированных шаблонов кодов, например, в два раза больше числа бит шаблона кода. В качестве примера, заявитель допускает, что скорость элементарной посылки равна 1023 бит. Тогда может быть сгенерировано 2046 шаблонов кодов, причем каждый имеет задержку, равную половине бит, то есть разность фазы кода. Выполняется процесс установления корреляции с принятым сигналом с использованием каждого шаблона кода. Когда в процессе корреляции обнаружен выходной сигнал не ниже предварительно определенной интенсивности, процессор 410 основной полосы частот блокирует шаблон кода, и может точно определить из шаблона кода спутник, который излучил сигнал позиционирования. Имеется только один код псевдошума, который имеет последовательность бит шаблона кода, представляющего интерес. Следовательно, может быть точно определен код псевдошума, используемый для кодирования расширенного спектра принятого сигнала позиционирования.
Как описано ниже, процесс, предназначенный для установления корреляции между сигналом, полученным с помощью приема, и локально сгенерированным шаблоном кода копии, может быть реализован как параллельный процесс.
На этапе S612 процессор 410 основной полосы частот специфицирует источник излучения сигнала позиционирования. В частности, устройство 416 определения специфицирует источник излучения сигнала на основании PRN-ID (см. память 420 фиг.4), соответствующего передатчику, который использует шаблон кода сигнала псевдошума, используемого во время модуляции для генерации сигнала. Если сигнал позиционирования излучен вне помещения, управление переходит на этап S620. Если сигнал позиционирования излучен внутри помещения, управление переходит на этап S630. Если множество принятых сигналов включает в себя сигналы, излученные внутри помещения и вне помещения, управление переходит на этап S640.
На этапе S620 устройство 100 предоставления позиционной информации демодулирует сигнал позиционирования, таким образом, чтобы получить данные, включенные в сигнал. В частности, блок 432 наружного позиционирования процессора 430 навигации накладывает шаблон кода, временно сохраненный в памяти 420 (вышеописанный “заблокированный” шаблон кода, далее упоминаемый как “заблокированный шаблон кода”), на сигнал позиционирования, чтобы получить сообщение навигации из подкадра, образующего сигнал. На этапе S622 блок 432 наружного позиционирования выполняет обычную обработку сообщения навигации для вычисления позиции с использованием четырех или более полученных сообщений навигации.
На этапе S624 блок 432 наружного позиционирования выполняет обработку, в результате которой вычисляется позиция устройства 100 предоставления позиционной информации. Например, если устройство 100 предоставления позиционной информации приняло сигналы позиционирования от четырех или более спутников, выполняется вычисление расстояния с использованием информации об орбите, информации времени и т.п. каждого спутника, включенной в сообщение навигации, демодулированное из каждого сигнала.
В соответствии с другим аспектом, если устройство 100 предоставления позиционной информации приняло сигнал позиционирования, излученный спутником (наружный сигнал), и сигнал, излученный с помощью передатчика, предназначенного для установки внутри помещения (внутренний сигнал) (то есть, когда этап S624 выполняется после этапа S642), сигнал, используемый для вычисления позиции, определяется на основании интенсивности внутреннего и наружного сигналов. В качестве примера, если внутренний сигнал имеет большую интенсивность, чем наружный сигнал, выбирается внутренний сигнал и значения координат, включенные во внутренний сигнал, используются в качестве позиции устройства 100 предоставления позиционной информации.
На этапе S630 устройство 100 предоставления позиционной информации демодулирует сигнал позиционирования, чтобы получить данные, включенные в сигнал. В частности, блок 434 внутреннего позиционирования, накладывает заблокированный шаблон кода на сигнал позиционирования, переданный из процессора 410 основной полосы частот, при этом данные сообщения получаются из подкадра, образующего сигнал позиционирования. Данные сообщения включаются в сигнал позиционирования, излученный с помощью передатчика, предназначенного для установки внутри помещения, вместо данных сообщения навигации, включенных в сигнал позиционирования, переданный из спутника. Следовательно, предпочтительно, что длина данных для данных сообщения является той же, что и длина данных навигации.
На этапе S632 блок 434 внутреннего позиционирования получает значения координат из данных (то есть данные для специфицирования места установки передатчика, предназначенного для установки внутри помещения (например, координату 563 Х, координату 564 Y и координату 565 Z сигнала 560, изображенного на фиг.5)). Если текстовая информация, представляющая место установки или адрес места установки, включена в кадр вместо таких значений координат, получают такую текстовую информацию.
На этапе S640 устройство 100 предоставления позиционной информации демодулирует сигнал позиционирования, таким образом, чтобы получить данные, включенные в сигнал. В частности, блок 432 наружного позиционирования накладывает заблокированный шаблон кода на сигнал позиционирования, переданный с помощью процессора 410 основной полосы частот, таким образом, чтобы получить данные в подкадре, образующем сигнал позиционирования. Из этого следует, что устройство 100 предоставления позиционной информации принимает как сигнал от спутника, так и сигнал из передатчика, предназначенного для установки внутри помещения, и, следовательно, оно работает в, так называемом “гибридном” режиме. Таким образом, сообщение навигации, имеющее синхронизированные данные времени, получают из сигнала от каждого спутника, а данные, имеющие позиционную информацию, такую как значения координат и тому подобные, упомянутые выше, получают из сигнала из передатчика, предназначенного для установки внутри помещения.
На этапе S642 блок 434 внутреннего позиционирования выполняет обработку, предназначенную для получения значения 563 координаты Х, значения 564 координаты Y и значения координаты 565 Z из сигнала позиционирования, излучаемого с помощью передатчика 200-1, предназначенного для установки внутри помещения, и получает и обрабатывает сообщение навигации из сигнала позиционирования, излучаемого с помощью спутника GPS. Затем управление переходит на этап S624.
На этапе S650 процессор 430 навигации выполняет обработку, предназначенную для отображения позиционной информации на устройстве 440 отображения, на основании результата вычисления позиции. В частности, данные изображения, предназначенные для отображения полученных координат, или данные, предназначенные для отображения места установки передатчика 200-1, предназначенного для установки внутри помещения, генерируются и передаются в устройство 440 отображения. На основании таких данных устройство 440 отображения отображает позиционную информацию устройства 100 предоставления позиционной информации в области устройства отображения.
Ссылаясь на фиг.7, ниже описан способ отображения позиционной информации устройства 100 предоставления позиционной информации. Фиг.7 изображает отображение изображения на устройстве 440 отображения устройства 100 предоставления позиционной информации. Когда устройство 100 предоставления позиционной информации принимает сигнал позиционирования, излучаемый из каждого спутника GPS вне помещения, устройство 440 отображения отображает пиктограмму 710, указывающую, что позиционная информация принята, на основании сигнала позиционирования. Когда пользователь устройства 100 предоставления позиционной информации перемещается внутрь помещения, устройство 100 предоставления позиционной информации больше не может принимать сигнал позиционирования, излучаемый из каждого спутника GPS. Вместо этого устройство 100 предоставления позиционной информации принимает сигнал, например, излучаемый с помощью передатчика 200-1, предназначенного для установки внутри помещения. Сигнал передается таким же способом, что и сигнал позиционирования, излучаемый из спутника GPS, как описано выше. Таким образом, устройство 100 предоставления позиционной информации выполняет тот же самый процесс относительно сигнала, который выполнялся, когда позиционный сигнал принимается со спутника. Когда устройство 100 предоставления позиционной информации получает позиционную информацию из сигнала, на устройстве 440 отображения отображается пиктограммы 720, указывающих, что позиционная информация получена на основании сигнала, излучаемого из передатчика, установленного внутри помещения.
Как описано выше, устройство 100 предоставления позиционной информации в соответствии с первым вариантом осуществления настоящего изобретения принимает, в месте, где не могут быть приняты радиосигналы от спутника GPS, таком как внутри помещения или пассаже, находящемся на земле, радиосигналы, излучаемые из передатчика (такого как передатчики 200-1, 200-2 и 200-3, предназначенные для установки внутри помещения), установленного на позиции. Устройство 100 предоставления позиционной информации получает информацию, точно определяющую позицию передатчика (такую как значения координат или адрес), из радиосигналов и отображает ее на устройстве 440 отображения. Таким образом, пользователь устройства 100 предоставления позиционной информации знает, где он/она находится. Таким образом, даже в месте, где сигнал позиционирования не может быть непосредственно принят, может быть предоставлена позиционная информация.
Таким образом, становится возможным стабильный прием сигнала внутри помещения. Кроме того, даже внутри помещения позиционная информация может быть предоставлена со стабильной точностью приблизительно нескольких метров.
Наземное время (время передатчика, такого как передатчик 200-1, предназначенный для установки внутри помещения) и спутниковое время могут быть независимыми друг от друга, и синхронизация является ненужной. Следовательно, после начала работы системы предоставления позиционной информации не нужно устанавливать синхронизацию времени передатчиков, предназначенных для установки внутри помещения, и, следовательно, работа является простой.
Каждый сигнал, излучаемый из каждого передатчика, предназначенного для установки внутри помещения, сам включает в себя информацию, предназначенную для точного определения местоположения, в котором установлен передатчик. Следовательно, не нужно вычислять позиционную информацию на основании сигналов, излучаемых из множества спутников, и, следовательно, позиционная информация может быть выделена из сигнала, излучаемого из одного передатчика.
Кроме того, так как принимается сигнал, излучаемый из одного передатчика, предназначенного для установки внутри помещения, может быть точно определена позиция, в которой принимается сигнал. Следовательно, по сравнению с другой традиционной системой позиционирования, такой как GPS, система, предназначенная для предоставления позиции, может быть реализована простым способом.
В настоящем описании устройство 100 предоставления позиционной информации не требует специального аппаратного обеспечения, предназначенного для приема сигнала, излучаемого с помощью передатчика 200-1, предназначенного для установки внутри помещения, и оно может быть осуществлено с помощью аппаратного обеспечения, предназначенного для реализации традиционной системы позиционирования. Таким образом, не нужно проектировать с самого начала аппаратное обеспечение, предназначенное для применения способа настоящего варианта осуществления, и, следовательно, может быть предотвращено увеличение стоимости устройства 100 предоставления позиционной информации, способствуя более широкому использованию. Кроме того, может быть предоставлено устройство предоставления позиционной информации, которое не увеличивает или не усложняет масштаб схем.
В частности, память 420 устройства 100 предоставления позиционной информации хранит PRN-ID, определенный заранее для внутреннего передатчика и/или спутника. Устройство 100 предоставления позиционной информации имеет программу, предназначенную для обработки или определения на основании PRN-ID, излучены ли принятые радиосигналы со спутника или из передатчика, предназначенного для установки внутри помещения. Программа реализуется с помощью устройства арифметической обработки, такого как процессор основной полосы частот. В качестве альтернативы, элемент схемы, предназначенный для определения, может быть изменен на элемент схемы, включающий в себя функции, реализованные с помощью программы, посредством которой может быть выполнено устройство 100 предоставления позиционной информации.
Если устройство 100 предоставления позиционной информации осуществлено как портативный телефон, полученная информация может быть сохранена в энергонезависимой памяти 420, такой как флэш-память. Во время передачи через эфир из портативного телефона данные, сохраненные в памяти 420, могут быть переданы адресату. С помощью такого подхода позиционная информация источника излучения, то есть позиционная информация, полученная с помощью устройства 100 предоставления позиционной информации, как портативного телефона, из внутреннего передатчика передается в базовую станцию, которая ретранслирует передачу. Базовая станция сохраняет позиционную информацию как запись передачи вместе с данными и временем приема. Если адресат является номером экстренного контакта (в Японии 110), о позиционной информации источника излучения может быть уведомлено непосредственно. Таким образом, подобно традиционному уведомлению об источнике излучения экстренного вызова из фиксированного телефона, становится возможным уведомление об источнике излучения из подвижного объекта.
Что касается передатчика, установленного в специальном местоположении, может быть использован передатчик, который может излучать сигнал, подобный сигналу, излучаемому с помощью передатчика, установленного на спутнике позиционирования, чтобы реализовать систему предоставления позиционной информации. Следовательно, становится ненужным повторное проектирование передатчика, начиная с самого начала.
Система предоставления позиционной информации в соответствии с настоящим вариантом осуществления использует сигнал расширенного спектра в качестве сигнала для позиционирования. Передача этого сигнала может требовать меньше электрической мощности на частоту и, следовательно, управление радиосигналами могло бы быть более простым по сравнению с традиционным RF признаком. В результате конструкция системы предоставления позиционной информации становится проще.
Первая модификация
Ниже описана первая модификация настоящего изобретения со ссылкой на фиг.8. Структура сигналов, передаваемых из различных передатчиков, не ограничена структурой, изображенной на фиг.5. Фиг.8 изображает структуру сигнала в соответствии с настоящей модификацией. В настоящей модификации передают шесть подкадров. Как первый подкадр, сигнал 810 передается с помощью передатчика. Сигнал 810 включает в себя транспортные издержки 811 из 30 бит, информацию 812 времени из 30 бит, PRN-ID 813 из 6 бит, ID 814 передатчика из 15 бит, значение 815 координаты Х, значение 816 координаты Y и значение 817 координаты Z. Первые 60 бит сигнала 810 являются теми же, что и первые 60 бит каждого из подкадров с 510 по 550, излучаемых с помощью спутника GPS.
Как второй подкадр, сигнал 820 передается с помощью передатчика. Сигнал 820 включает в себя ID 821 подкадра из 6 бит, коэффициент 822 коррекции высоты и адрес 823 позиции передатчика. С помощью определения разных порций информации в 144 бит (в сигнале 820, коэффициента 822 коррекции высоты и адреса позиционной информации) после ID подкадра сигнала 820 с третьего по шестой подкадры также передаются таким же образом. Порции информации, включенной в каждый подкадр, не ограничены порциями информации, описанными выше. В качестве примера, объявление, связанное с позиционной информацией, URL (унифицированные адреса ресурсов) сайта Интернет и т.п. могут быть сохранены в областях, определенных заранее в каждом подкадре.
Сигнал 830 представляет пример передачи сигналов 810 и 820, описанных выше, а с третьего по шестой подкадры имеют ту же структуру, что и структура сигнала 820. В частности, сигнал 830 имеет первый подкадр 831 и второй подкадр 832. Первый подкадр 831 имеет тот же заголовок, что и подкадры с 510 по 550, переданные из спутника GPS. Второй подкадр 832 соответствует сигналу 820.
Сигнал 840 включает в себя первый подкадр 831 и третий подкадр 842. Первый подкадр 831 является таким же, что и первый подкадр 831. Третий подкадр имеет ту же структуру, что и структура сигнала 820.
Структура повторяется в сигнале 870 для передачи шестого подкадра 872. Сигнал 870 включает в себя первый подкадр 831 и шестой подкадр 872.
Когда передатчик многократно передает сигналы с 830 по 870, из этого следует, что первый подкадр 831 передается каждый раз, когда передается каждый сигнал. После того, как передан первый подкадр 831, любой из остальных подкадров интерполируется. В частности, последовательность передачи соответствующих кадров является следующей: первый подкадр 831 - второй подкадр 832 - первый подкадр 831 - третий подкадр 842 - первый подкадр … шестой подкадр 872 - первый подкадр 831 - второй подкадр 832….
Вторая модификация
Ниже описана вторая модификация. Структура данных сообщения может быть определена независимо от подкадров с 510 по 550. Фиг.9 схематично изображает структуру сигнала 910 в соответствии с настоящей модификацией. Ссылаясь на фиг.9, сигнал 910 включает в себя транспортные издержки 911, преамбулу 912, PRN-ID 913, ID 914 передатчика, значение 916 координаты Х, значение 917 координаты Y и значение 918 координаты Z и контроль по четности/CRC 919. Сигнал 920 имеет структуру, подобную структуре сигнала 910, и вместо первой переменной 915 в сигнале 910 он включает вторую переменную 925.
Каждый сигнал имеет длину, равную 150 бит. Излучаются шесть сигналов, имеющих одну и ту же структуру. Сигнал, имеющий такую структуру, может быть сформирован как сигнал, излучаемый из передатчика, предназначенного для установки внутри помещения.
Каждый сигнал, изображенный на фиг.9, имеет PRN-ID и, следовательно, устройство 100 предоставления позиционной информации может специфицировать источник передачи принятого сигнала на основании PRN-ID. Если источник передачи является передатчиком, предназначенным для установки внутри помещения, сигнал содержит значения координат X, Y и Z. Таким образом, устройство 100 предоставления позиционной информации может отображать позицию внутри помещения.
Третья модификация
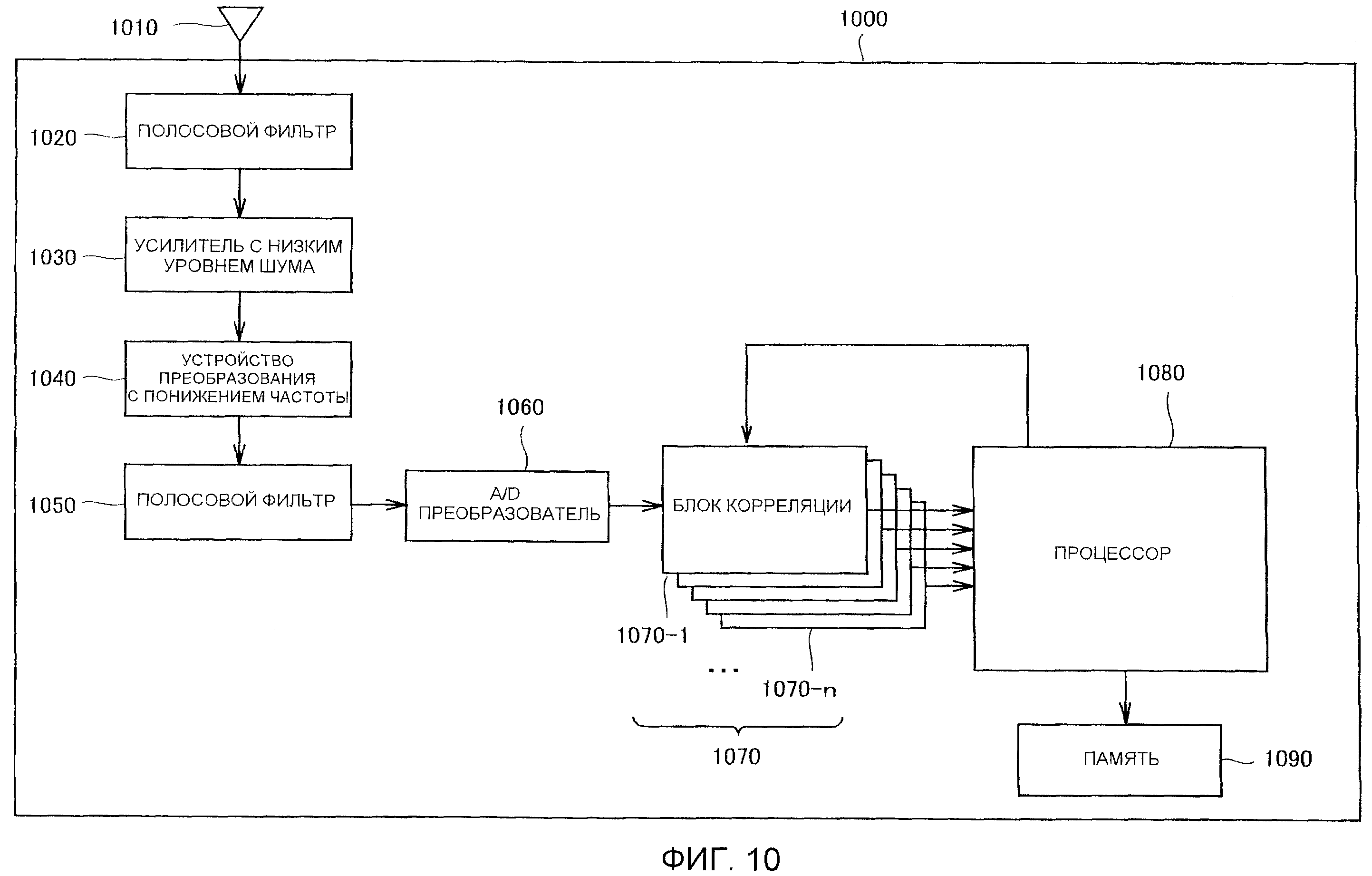
Вместо структуры устройства 412 корреляции устройства 100 предоставления позиционной информации может быть использовано множество устройств корреляции. В этом случае процессы, предназначенные для сравнения сигнала позиционирования с копией, выполняются одновременно параллельно и, следовательно, время для вычисления позиционной информации становится короче. Устройство 100 предоставления позиционной информации в соответствии с настоящим изобретением включает в себя антенну 1010, полосовой фильтр 1020, электрически соединенный с антенной 1010, усилитель 1030 с низким уровнем шума, электрически соединенный с полосовым фильтром 1020, устройство 1040 преобразования с понижением частоты, электрически соединенное с усилителем 1030 с низким уровнем шума, полосовой фильтр 1050, электрически соединенный с устройством 1040 с понижением частоты, A/D преобразователь 1060, электрически соединенный с полосовым фильтром 1050, параллельное устройство корреляции 1070, включающее в себя множество устройств корреляции, электрически соединенных с A/D преобразователем 1060, процессор 1080, электрически соединенный с параллельным устройством 1070 корреляции, и память 1090, электрически соединенную с процессором 1080.
Параллельное устройство 1070 корреляции включает в себя n устройств с 1070-1 по 1070-n корреляции. Устройства корреляции одновременно выполняют сравнение между принятым сигналом позиционирования и шаблоном кода, сгенерированном из демодуляции сигнала позиционирования, на основании сигнала управления, выведенного из процессора 1080.
В частности, процессор 1080 выдает команду в каждое параллельное устройство 1070 корреляции, чтобы сгенерировать шаблон кода (со сдвинутой фазой кода), отражающий задержку, возможно, испытываемую в коде псевдошума. Командой будет число спутников × 2 × 1023 (длина шаблона кода, используемого кода псевдошума). Каждое параллельное устройство 1070 корреляции генерирует, на основании примененной к нему команды, шаблон кода, имеющий разную фазу кода, с использованием шаблона кода псевдошума, определенного для каждого спутника. Затем из этого следует, что среди всех сгенерированных шаблонов кодов имеется один шаблон, который соответствует шаблону кода псевдошума, использованного для модуляции принятого сигнала позиционирования. Следовательно, с помощью подготовки заранее необходимого числа устройств корреляции для процесса сравнения с использованием соответствующих шаблонов кодов в виде параллельного устройства 1070 корреляции можно мгновенно специфицировать шаблон кода кода псевдошума. Этот процесс также применим, когда устройство 100 предоставления позиционной информации принимает сигнал из передатчика, предназначенного для установки внутри помещения. Следовательно, даже когда пользователь устройства предоставления позиционной информации остается внутри помещения, позиционная информация может быть мгновенно получена.
Второй вариант осуществления
Ниже описан второй вариант осуществления настоящего изобретения. Система предоставления позиционной информации в соответствии с настоящим изобретением отличается от первого варианта осуществления тем, что прикрепляется множество передатчиков.
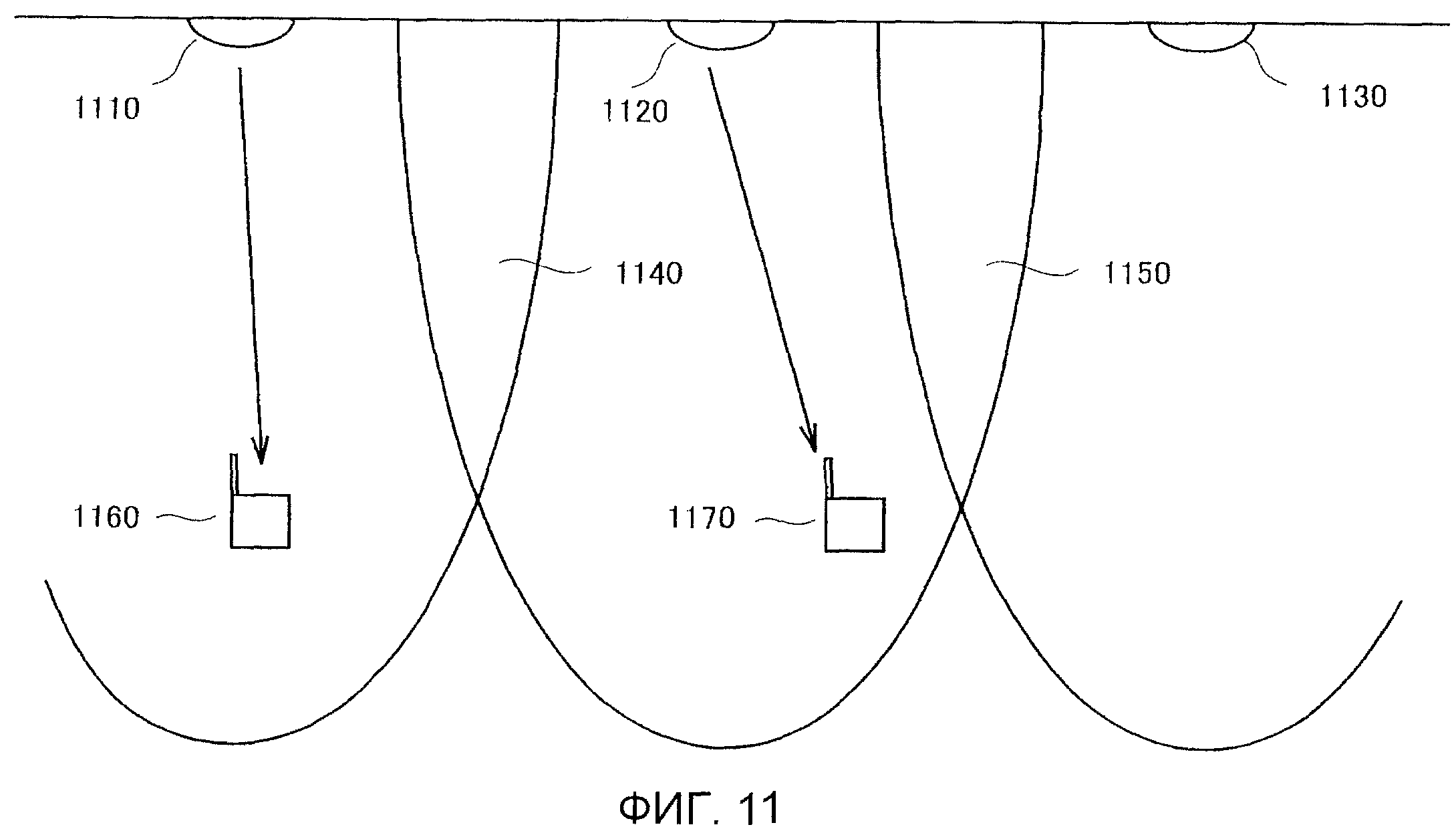
Фиг.11 показывает, каким образом используется устройство предоставления позиционной информации в соответствии со вторым вариантом осуществления. Ссылаясь на фиг.11, передатчики 1110, 1120 и 1130, предназначенные для установки внутри помещения, прикрепляют к потолку одного и того же этажа. Каждый передатчик, предназначенный для установки внутри помещения, выполняет тот же процесс, который выполнялся с помощью передатчика 200-1, предназначенного для установки внутри помещения, описанного выше. В частности, каждый передатчик, предназначенный для установки внутри помещения, излучает сигнал позиционирования, включающий в себя данные, представляющие местоположение, в котором он установлен.
В настоящем варианте осуществления в зависимости от позиции прикрепления передатчиков, предназначенных для установки внутри помещения, может быть область (или пространство), в которой могут быть одновременно приняты сигналы, передаваемые из смежных передатчиков. В качестве примера, в области 1140 могут быть одновременно приняты сигналы, излучаемые из передатчиков 1110 и 1120, предназначенных для установки внутри помещения. Подобным образом в области 1150 могут быть одновременно приняты сигналы позиционирования, излучаемые из передатчиков 1120 и 1130, предназначенных для установки внутри помещения.
Следовательно, допуская, что устройство 1160 предоставления позиционной информации в соответствии с настоящим изобретением находится в позиции, изображенной на фиг.11, устройство 1160 предоставления позиционной информации может получать данные, представляющие позицию прикрепления передатчика 1110, предназначенного для установки внутри помещения, включенную в сигнал, излучаемый из передатчика 1110, предназначенного для установки внутри помещения, как позицию устройства 1160 предоставления позиционной информации. После чего, когда пользователь устройства 100 предоставления позиционной информации перемещается в позицию, например, соответствующую области 1140, устройство 1160 предоставления позиционной информации также может принимать сигнал, излучаемый с помощью передатчика 1120, предназначенного для установки внутри помещения, дополнительно к сигналу из передатчика 1110, предназначенного для установки внутри помещения. В этом случае позиционные данные, включенные в сигнал, должны быть использованы в качестве позиции устройства 1160 предоставления позиционной информации, может быть определено на основании интенсивности принятых сигналов. В частности, если принимаются сигналы, излучаемые из множества передатчиков, предназначенных для установки внутри помещения, данные о том, интенсивность какого сигнала является самой высокой среди этих сигналов, могут быть использованы для отображения позиционной информации. Если сигналы имеет одинаковую интенсивность, может быть получена арифметическая сумма данных, включенных в сигналы, и использована в качестве позиции устройства 1160 предоставления позиционной информации.
Как описано выше, с помощью устройства 1160 предоставления позиционной информации в соответствии с настоящим вариантом осуществления, даже когда множество сигналов для позиционирования принимается внутри помещения, может быть точно определен источник излучения любого из сигналов, и, следовательно, может быть определена позиция источника излучения, то есть позиция передатчика, установленного внутри помещения.
В настоящем описании “внутри помещения” не ограничено внутри здания или другой конструкции, и это означает любое место, в котором не могут быть приняты радиосигналы, излучаемые из спутника GPS. Такие места могут включать в себя пассаж, находящийся на земле или железнодорожное транспортное средство.
Третий вариант осуществления
Ниже описан третий вариант осуществления настоящего изобретения. Устройство предоставления позиционной информации в соответствии с настоящим вариантом осуществления отличается от вариантов осуществления, описанных выше, тем, что вместо специфицирования позиции на основании данных, включенных в передатчике, предназначенном для установки внутри помещения, данные, предназначенные для идентификации, передаются в устройство предоставления информации, связанное с передатчиком, таким образом, что может быть получена позиционная информация.
Фиг.12 показывает, каким образом используется устройство предоставления позиционной информации в соответствии с настоящим вариантом осуществления. Устройство предоставления позиционной информации, например, реализовано как портативный телефон 1200. Портативный телефон 1200 может принимать сигнал позиционирования, излучаемый передатчиком 1210, предназначенным для установки внутри помещения. Передатчик 1210, предназначенный для установки внутри помещения, соединен с Интернетом 1220. Интернет 1220 соединен с сервером 1230 предоставления информации, который может предоставлять информацию, связанную с передатчиком 1210, предназначенным для установки внутри помещения. Интернет 1220 также соединен с базовой станцией 1240, предназначенной для взаимодействия с портативным телефоном 1200.
Когда портативный телефон 1200 принимает сигнал, излучаемый передатчиком 1210, предназначенным для установки внутри помещения, он получает ID передатчика, предназначенный для идентификации передатчика 1210, предназначенного для установки внутри помещения, из сигнала. Например, ID передатчика соответствует PRN-ID, описанному выше. Портативный телефон 1200 передает ID передатчика (возможно, с PRN-ID) на сервер 1230 предоставления информации. В частности, портативный телефон 1200 начинает взаимодействие с базовой станцией 1240 и передает пакетные данные, включающие в себя полученный ID передатчика, на сервер 1230 предоставления информации.
При распознавании ID передатчика сервер 1230 предоставления информации обращается в базу данных, связанную с ID передатчика, и считывает позиционную информацию, связанную с ID. Когда сервер 1230 предоставления информации передает данные в базовую станцию 1240, базовая станция 1240 передает эти данные через эфир. Портативный телефон 1200 обнаруживает поступление данных и в соответствии с операцией просмотра пользователем портативного телефона 1200 получает позицию передатчика 1210.
Ссылаясь на фиг.13, далее описана структура портативного телефона 1200. Фиг.13 является блок-схемой, изображающей конфигурацию аппаратного обеспечения портативного телефона 1200. Портативный телефон 1200 включает в себя антенну 1308, устройство 1302 связи, CPU 1310, кнопку 1320 операции, камеру 1340, флэш-память 1344, RAM 1346, ROM 1348, накопитель 1380 карты памяти, схему 1370 обработки речевых сигналов, микрофон 1372, громкоговоритель 1374, дисплей 1350, LED (светодиод) 1376, IF 1378 передачи данных и вибратор 1384, все электрически соединенные друг с другом.
Сигнал, принятый антенной 1308, передается в CPU 1310 с помощью устройства 1302 связи. CPU 1310 передает сигнал в схему 1370 обработки речевых сигналов. Схема 1370 обработки речевых сигналов выполняет предварительно определенную обработку сигнала относительно сигнала и передает обработанный сигнал в громкоговоритель 1374. На основании сигнала громкоговоритель 1374 выводит речь.
Микрофон 1372 принимает речь в портативный телефон 1200 и выводит сигнал, соответствующий произнесенной речи, в схему 1370 обработки речевых сигналов. На основании сигнала схема 1370 обработки речевых сигналов выполняет предварительно определенную обработку сигнала для связи и передает обработанный сигнал в CPU 1310. CPU 1310 преобразует сигнал в данные для передачи и передает данные в устройство 1302 связи. Когда устройство 1302 связи излучает сигнал через антенну 1308, базовая станция 1240 принимает сигнал.
Флэш-память 1344 сохраняет данные, посланные из CPU 1310. CPU 1310 считывает данные, сохраненные во флэш-памяти, и выполняет предварительно определенные процессы с использованием данных.
RAM 1346 временно хранит данные, сгенерированные с помощью CPU 1310, на основании операции на кнопке 1320 операции. ROM 1348 данных сохраняет данные или программу, вызывающие выполнение портативным телефоном 1200 предварительно определенной операции. CPU 1310 считывает данные или программу из ROM 1348 данных и обеспечивает выполнение портативным телефоном 1200 предварительно определенного процесса.
Накопитель 1380 карты памяти принимает карту 1382 памяти, загруженную в него. Накопитель 1380 карты памяти считывает данные, сохраненные в карте памяти 1382, и передает данные в CPU 1310. Накопитель 1380 карты памяти сохраняет данные, выведенные из CPU 1310, в область памяти данных, обеспеченную в карте 1382 памяти.
Схема 1370 обработки речевых сигналов выполняет обработку сигнала, используемого для связи, такую как описано выше. CPU 1310 и схема 1370 обработки речевых сигналов могут быть сформированы как единое целое.
На основании данных, выведенных из CPU 1310, дисплей 1350 отображает изображение, определенное с помощью данных. Например, если флэш-память 1344 сохраняет данные (например, URL), предназначенные для доступа на сервер 1230 предоставления информации, дисплей 1350 отображает URL.
LED 1376 реализует предварительно определенную операцию излучения света на основании сигнала из CPU 1310. В качестве примера, если LED 1376 может отображать множество цветов на основании данных, включенных в сигнал, выведенный из CPU 1310, LED 1376 излучает свет, цвет которого связан с данными.
Кабель, предназначенный для передачи данных, присоединен к IF 1378 передачи данных. IF 1378 передачи данных передает сигнал, выведенный из CPU 1310, в кабель. В качестве альтернативы, IF 1378 передачи данных передает данные, принятые из кабеля, в CPU 1310.
Вибратор 1384 генерирует предварительно определенную частоту на основании сигнала, выведенного из CPU 1310. Основная работа портативного телефона 1200 без труда может быть понятна специалисту в данной области техники и поэтому ее подробное описание опускается.
Ссылаясь на фиг.14, ниже описана характерная конфигурация сервера 1230 предоставления информации. Фиг.14 является блок-схемой, представляющей конфигурацию аппаратного обеспечения сервера 1230 предоставления информации. Сервер 1230 предоставления информации, например, осуществлен с помощью широко известной компьютерной системы.
Сервер 1230 предоставления информации включает в себя в качестве основного аппаратного обеспечения CPU 1410, мышь 1420 и клавиатуру 1430, предназначенную для приема вводов команд от пользователя сервера 1230 предоставления информации, RAM 1440, временно хранящую данные, генерируемые при выполнении программы с помощью CPU 1410, или данные, введенные через мышь 1420 или клавиатуру 1430, жесткий диск 1450, запоминающий большой объем данных энергонезависимым способом, накопитель 1460 CD-ROM (ПЗУ на компакт-диске), монитор 1480 и I/F 1470 связи. Эти компоненты аппаратного обеспечения соединены друг с другом с помощью шины данных. CD-ROM 1462 загружается в накопитель 1460 CD-ROM.
Процесс в компьютерной системе, реализующей сервер 1230 предоставления информации, осуществляется аппаратными средствами и программным обеспечением, выполняемым с помощью CPU 1410. Программное обеспечение может быть сохранено заранее на жестком диске 1450. В качестве альтернативы, программное обеспечение может быть сохранено на носителе для записи данных, таком как CD-ROM 1460 или тому подобной, или может распространяться как программный продукт. В качестве альтернативы, программное обеспечение может быть предоставлено как доступный для загрузки программный продукт с помощью другого провайдера информации, соединенного с Интернетом. Программное обеспечение считывается с помощью накопителя 1460 CD-ROM или с помощью другого устройства считывания данных с носителя для записи данных или загружается через I/F 1470 связи и временно сохраняется на жестком диске 1450. Программное обеспечение считывается с жесткого диска 1450 с помощью CPU 1410 и сохраняется в виде доступной для выполнения программы в RAM 1440. CPU 1410 выполняет программу.
Аппаратные средства компьютерной системы, реализующей сервер 1230 предоставления информации, изображенные на фиг.14, являются общеизвестными аппаратными средствами. Вследствие этого необходимыми частями сервера 1230 предоставления информации в соответствии с настоящим изобретением могут быть программное обеспечение, сохраненное в RAM 1440, жесткий диск 1450, CD-ROM 1462 или другой носитель для записи данных или программное обеспечение, доступное для загрузки через сеть. Работа аппаратных средств компьютерной системы является широко известной, поэтому ее подробное описание не приводится.
Носитель для записи не ограничен CD-ROM 1462, жестким диском 1450 и тому подобными, описанными выше, и может быть носителем, который может переносить программу фиксированным способом, таким как магнитная лента, кассетная лента, оптический диск (МО (магнитный оптический диск)/MD (мини-диск)/DVD (цифровой универсальный диск)), карта IC (интегральной схемы) (включающая в себя карту памяти), оптическая карта или полупроводниковая память, включающая в себя ROM маски, EPROM, EEPROM и флэш-ROM.
Программа в настоящем описании включает в себя не только программу, непосредственно доступную для выполнения с помощью CPU 1410, но также программу в виде исходного кода, сжатую программу или зашифрованную программу.
Ссылаясь на фиг.15, ниже описана структура данных сервера 1230 предоставления информации. Фиг.15 схематично показывает, каким образом данные сохраняются на жестком диске 1450. Жесткий диск 1450 включает в себя области с 1510 по 1550.
Номер записи, предназначенный для идентификации записи данных, сохраненной на жестком диске 1450, сохраняется в области 1510. ID передатчика, предназначенный для идентификации передатчика, излучающего сигнал позиционирования, сохраняется в области 1520. Данные (значения координат), представляющие местоположение, в котором установлен передатчик, сохраняются в области 1530. В качестве примера, данные сохраняются на жестком диске 1450 каждый раз, когда устанавливается передатчик. Конкретное имя места установки передатчика сохраняется в области 1540. Данные используют таким образом, чтобы дать возможность распознавания с помощью администратора, управляющего данными, сохраненными на жестком диске 1450 (или провайдера службы, предоставляющего позиционную информацию с использованием сервера 1230 предоставления информации). Данные, представляющие адрес, в котором установлен передатчик, сохраняются в области 1550. Данные также используются администратором, подобно данным, сохраненным в области 1540.
Позиционная информация передатчика предоставляется с помощью сервера 1230 предоставления информации следующим образом. Портативный телефон 1200 генерирует пакетные данные, запрашивающие позиционную информацию (далее упоминаемые как “запрос”), с использованием ID передатчика и данных (URL и тому подобных) для доступа к серверу 1230 предоставления информации, полученных на основании результата определения PRN-ID. Портативный телефон 1200 передает запрос в базовую станцию 1240. Передача реализуется известной обработкой передачи. Принимая запрос, базовая станция 1240 передает его на сервер 1240 предоставления информации.
Сервер 1240 предоставления информации обнаруживает прием запроса. CPU 1410 получает ID передатчика из запроса и осуществляет поиск на жестком диске 1450. В частности, CPU 1410 выполняет процесс сравнения, чтобы понять, соответствует ли полученный ID передатчика ID передатчика, сохраненному в области 1520. В результате сравнения, если обнаружен ID передатчика, который соответствует ID передатчика, включенному в данные, переданные из портативного телефона 1200, CPU 1410 считывает значения координат (область 1530), связанные с ID передатчика, и генерирует пакетные данные для возврата позиционной информации в портативный телефон 1200. В частности, CPU 1410 прибавляет адрес портативного телефона 1200 к данным, имеющим значения координат, чтобы сгенерировать пакетные данные. CPU 1410 передает пакетные данные в базовую станцию 1240 через I/F 1470 связи.
Принимая пакетные данные, переданные с помощью сервера 1230 предоставления информации, базовая станция 1240 передает пакетные данные через эфир на основании адреса, включенного в данные. Базовая станция 1240 может сохранить принятые пакетные данные и время приема в энергонезависимой памяти (такой как жесткий диск). Это оставляет предысторию получения позиционной информации пользователем портативного телефона 1200 и, следовательно, может быть отслежен маршрут движения пользователя.
Когда портативный телефон 1200 находится в зоне досягаемости радиосигналов из базовой станции 1240, он принимает пакетные данные, переданные через эфир базовой станцией 1240. Когда пользователь портативного телефона 1200 выполняет предварительно определенную операцию (такую как операцию, предназначенную для просмотра электронной почты) для просмотра принятых данных, дисплей 1350 отображает значения координат передатчика. Таким образом, пользователь может знать приблизительную позицию. При этом подходе становится ненужной регистрация заранее значений координат каждого из передатчиков, установленных внутри помещения. Таким образом, место установки передатчика может быть изменено более гибко.
Как описано выше, в соответствии с системой предоставления позиционной информации в соответствии с настоящим изобретением сигнал, излучаемый из передатчика, обеспеченного на земле, должен включать в себя только данные (ID передатчика), предназначенные для идентификации передатчика. В сервере, предоставляющем позиционную информацию передатчика, данные сохраняются в связи с позиционной информацией. Портативный телефон 1200, действующий в качестве устройства предоставления позиционной информации, получает позиционную информацию путем передачи ID передатчика на сервер. В соответствии с таким способом предоставления информации не требуется, чтобы передатчик сохранял позиционную информацию самого передатчика, и, следовательно, позиция установки передатчика может быть легко изменена.
Варианты осуществления, которые описаны в настоящей заявке, являются только примерами и не должны быть интерпретированы как ограничивающие. Объем настоящего изобретения определен каждым из пунктов формулы изобретения с соответствующим учетом письменного описания вариантов осуществления и включает в себя модификации в пределах значения и эквивалентных признаков формулы изобретения.
Промышленная применимость
Устройство предоставления позиционной информации в соответствии с настоящим изобретением применимо к портативному телефону, имеющему функцию позиционирования, портативному терминалу позиционирования, портативному терминалу мониторинга или другому терминалу, который может принимать позиционный сигнал. Кроме того, передатчик в соответствии с настоящим изобретением применим к передатчику, установленному внутри помещения, или другим устройствам передачи.
Реферат
Изобретение относится к области навигации и позиционирования, а именно к предоставлению позиционной информации в местах недосягаемости радиосигналов, и может быть использовано в терминале с возможностью приема позиционного сигнала, а также в устройствах передачи. Технический результат заключается в предоставлении позиционной информации без потери точности даже в местах вне досягаемости радиосигналов спутника, обеспечении отсутствия необходимости синхронизации во времени со спутником. Для этого процесс, выполняемый с помощью устройства предоставления позиционной информации, включает в себя этапы: получения принятого сигнала позиционирования (S610), специфицирования источника излучения сигнала позиционирования (S612), получения, когда источник излучения сигнала позиционирования находится вне помещения, сообщения навигации, включенного в сигнал позиционирования (S622), выполнения процесса, предназначенного для вычисления позиции на основании сигнала (S624), получения, когда источник излучения сигнала позиционирования находится внутри помещения, данных сообщения из сигнала позиционирования (S630), получения значения координат из данных (S632) и отображения позиционной информации на основании значений координат (S650). 3 н. и 14 з.п. ф-лы, 15 ил.
Формула
передатчик (200-1), предназначенный для установки внутри помещения, причем упомянутый передатчик, предназначенный для установки внутри помещения, включает в себя
первый блок (240) памяти, хранящий позиционные данные, предназначенные для точного определения местоположения, в котором установлен упомянутый передатчик, предназначенный для установки внутри помещения,
блок (210) генерации, генерирующий второй сигнал позиционирования, имеющий упомянутые позиционные данные, как сигнал расширенного спектра, и
блок (292) передачи, передающий упомянутый сигнал расширенного спектра; и
устройство (100) предоставления позиционной информации, причем упомянутое устройство предоставления позиционной информации включает в себя
блок (402) приема, принимающий сигнал расширенного спектра,
второй блок (420) памяти, хранящий шаблоны кодов, связанные с упомянутыми первым и вторым сигналами позиционирования,
блок (412) специфицирования, специфицирующий на основании шаблона кода, сохраненного во втором блоке памяти, шаблон кода, соответствующий сигналу расширенного спектра, принятому упомянутым блоком приема,
блок (316) определения, определяющий, какой из упомянутых первого и второго сигналов позиционирования принят, на основании сигнала, полученного демодуляцией с использованием шаблона кода, специфицированного упомянутым блоком специфицирования,
блок (430) вычисления позиционной информации, вычисляющий позиционную информацию упомянутого устройства предоставления позиционной информации, путем переключения процесса в зависимости от результата упомянутого определения, и
блок (440) вывода, выводящий позиционную информацию, полученную блоком вычисления позиционной информации;
причем упомянутый блок вычисления позиционной информации получает упомянутые позиционные данные из упомянутого сигнала, полученного демодуляцией, когда принимается упомянутый второй сигнал позиционирования, переданный передатчиком, предназначенным для установки внутри помещения, и
вычисляет упомянутую позиционную информацию на основании каждого из упомянутого множества сигналов расширенного спектра, когда принимается множество упомянутых первых сигналов позиционирования; при этом
время, поддерживаемое первым устройством тактового генератора каждого из упомянутых спутников, предназначенным для генерирования информации времени, включенной в упомянутый первый сигнал позиционирования из упомянутого спутника, является независимым от времени, поддерживаемого вторым устройством тактового генератора в упомянутом передатчике, предназначенном для установки внутри помещения.
упомянутый блок вычисления позиционной информации упомянутого устройства предоставления позиционной информации включает в себя блок вычисления, вычисляющий позицию упомянутого устройства предоставления позиционной информации на основании каждого упомянутого сообщения навигации, когда принимается множеством упомянутых первых сигналов позиционирования.
упомянутый блок вывода выводит упомянутую позиционную информацию, полученную только из упомянутых позиционных данных, как изображение, представляющее измеренную позицию.
упомянутый блок вычисления позиционной информации переключает упомянутый процесс в соответствии с результатом определения на основании выходных сигналов из упомянутого множества блоков корреляции.
расширение частоты упомянутого сигнала позиционирования составляет 1,023 МГц.
блок (402) приема, принимающий сигнал расширенного спектра;
блок (420) памяти, хранящий шаблоны кодов, связанных с упомянутыми первым и вторым сигналами позиционирования;
блок (412) специфицирования, предназначенный для специфицирования шаблона кода, соответствующего сигналу расширенного спектра, принятому с помощью упомянутого блока приема, на основании шаблона кода, запомненного в упомянутом блоке памяти,
блок (316) определения, определяющий, какой из упомянутых первого и второго сигналов позиционирования принят, на основании сигнала, полученного демодуляцией с использованием шаблона кода, специфицированного упомянутым блоком специфицирования,
блок (430) вычисления позиционной информации, вычисляющий позиционную информацию упомянутого устройства предоставления позиционной информации путем переключения процесса в зависимости от результата упомянутого определения, и
блок (440) вывода, выводящий позиционную информацию, полученную блоком вычисления позиционной информации;
причем упомянутый блок вычисления позиционной информации получает упомянутые позиционные данные из упомянутого сигнала, полученного демодуляцией, когда принимается упомянутый второй сигнал позиционирования, переданный передатчиком, предназначенным для установки внутри помещения, и
вычисляет упомянутую позиционную информацию на основании каждого из упомянутого множества сигналов расширенного спектра, когда принимают множество упомянутых первых сигналов позиционирования; при этом
упомянутые позиционные данные являются данными, непосредственно указывающими позицию упомянутого передатчика, предназначенного для установки внутри помещения, только с помощью упомянутых позиционных данных; и
упомянутый блок вывода выводит упомянутую позиционную информацию, полученную только из упомянутых позиционных данных, как изображение, представляющее измеренную позицию.
упомянутый второй сигнал позиционирования имеет формат, общий с форматом упомянутого первого сигнала позиционирования, и включает в себя упомянутые позиционные данные вместо сообщения навигации, включенного в упомянутый первый сигнал позиционирования; и
упомянутый блок вычисления позиционной информации упомянутого устройства предоставления позиционной информации включает в себя блок вычисления, вычисляющий позицию упомянутого устройства предоставления позиционной информации на основании каждого упомянутого сообщения навигации, когда принимается множество упомянутых первых сигналов позиционирования.
упомянутые позиционные данные включают в себя информацию, представляющую местоположение, в котором установлен упомянутый передатчик, предназначенный для установки внутри помещения; и
упомянутый блок вывода включает в себя устройство отображения, отображающее местоположение в котором установлен упомянутый передатчик, предназначенный для установки внутри помещения, на основании упомянутой информации.
упомянутый блок специфицирования включает в себя множество блоков корреляции, причем упомянутое множество блоков корреляции предоставлены общими для упомянутого первого и второго сигнала позиционирования и выполняют процесс корреляции между упомянутым множеством шаблонов кодов и упомянутыми сигналами расширенного спектра параллельно друг к другу для специфицирования упомянутого шаблона кода; и
упомянутый блок вычисления позиционной информации переключает упомянутый процесс в соответствии с результатом определения на основании выходных сигналов из упомянутого множества блоков корреляции.
упомянутый блок приема принимает каждый из упомянутых первых сигналов позиционирования, излучаемых из передатчиков, причем каждый передатчик установлен в каждом из множества местоположений, специфицированных заранее;
упомянутое устройство предоставления позиционной информации дополнительно содержит
блок обнаружения, определяющий интенсивность сигнала, принятого упомянутым блоком приема; причем
упомянутый блок получения специфицирует из первых сигналов позиционирования первый сигнал позиционирования, упомянутая интенсивность которого является самой высокой, и получает позиционные данные, включенные в специфицированный первый сигнал позиционирования.
упомянутые позиционные данные включают в себя идентификационные данные, предназначенные для идентификации упомянутого передатчика;
упомянутое устройство предоставления позиционной информации содержит
блок передачи, передающий, когда принимается упомянутый первый сигнал позиционирования, упомянутые идентификационные данные и запрос передачи позиционной информации упомянутого передатчика через линию связи на сервер, который предоставляет позиционную информацию в ответ на внешний запрос, причем упомянутую позиционную информацию и упомянутые идентификационные данные сохраняются в взаимосвязи друг с другом на упомянутом сервере; и
блок ввода, принимающий ввод упомянутой позиционной информации, переданной упомянутым сервером в ответ на упомянутый запрос передачи, через упомянутую линию связи; причем
упомянутый блок вывода включает в себя устройство отображения, предназначенное для отображения упомянутой позиционной информации.
блок (240) памяти, хранящий позиционные данные для специфицирования местоположения, в котором установлен упомянутый передатчик, предназначенный для установки внутри помещения, и
блок (210) генерации, генерирующий второй сигнал позиционирования, имеющий упомянутые позиционные данные, как сигнал расширенного спектра, причем упомянутый блок генерации генерирует упомянутый второй сигнал позиционирования как сигнал расширенного спектра, имеющий упомянутые позиционные данные вместо сообщения навигации, включенного в упомянутый первый сигнал позиционирования, и дающий возможность специфицирования упомянутого местоположения с помощью сигнала из одного упомянутого передатчика, предназначенного для установки внутри помещения, и
блок (292) передачи, передающий упомянутый сигнал расширенного спектра; при этом,
время, поддерживаемое первым блоком тактового генератора каждого из упомянутых спутников, предназначенным для генерирования информации времени, включенной в упомянутый первый сигнал позиционирования из упомянутого спутника, является независимым от времени, поддерживаемого вторым блоком тактового генератора в упомянутом передатчике, предназначенном для установки внутри помещения.
упомянутые позиционные данные включают в себя либо значения координат на земле упомянутого передатчика, предназначенного для установки внутри помещения, либо данные, представляющие местоположение в котором установлен упомянутый передатчик, предназначенный для установки внутри помещения.
Комментарии