Контроль целостности данных в системе определенияместоположения с использованием информации о местной топографии - RU2329521C2
Код документа: RU2329521C2
Чертежи














Описание
Данное изобретение относится к области контроля целостности данных измерений, выполняемых в системе определения местоположения, или оценок местоположения, получаемых в этой системе, а более конкретно, оно относится к осуществлению контроля целостности данных с использованием информации о местной топографии для учета таких факторов, как отсутствие прямой видимости или многолучевое распространение сигнала.
Уровень техники
Глобальная спутниковая система позиционирования (радиоопределения) (GPS) представляет собой группу искусственных спутников, движущихся по точно определенным орбитам над поверхностью Земли. Каждый спутник передает сигнал, модулированный псевдошумовым (ПШ, PN) кодом, уникальным для данного спутника. Каждый ПШ код содержит заданное количество элементов кода. Приемник системы GPS принимает составной сигнал, содержащий смесь сигналов от каждого из спутников, находящихся в зоне видимости приемника. Входящий в состав приемника обнаружитель сигналов обнаруживает передаваемый сигнал с конкретного спутника, определяя степень корреляции между принятым сигналом и сдвинутыми версиями ПШ кода, относящегося к данному спутнику. Если для одного из значений сдвига обнаружен достаточно качественно выраженный пик значения корреляции, то считается, что приемник обнаружил передаваемый сигнал с этого спутника.
Приемник оценивает свое местонахождение посредством обнаружения передаваемых сигналов, по меньшей мере, с четырех спутников. Для каждого обнаруженного передаваемого сигнала, приемник, используя сдвиг в ПШ коде, оценивает время задержки (выраженное в элементах кода или в долях элемента кода) между временем передачи и временем поступления сигнала. Зная скорость прохождения переданного сигнала, приемник производит оценку расстояния между собой и спутником. Это полученное в результате оценки расстояние задает сферу вокруг спутника. Приемнику известны точно определенные орбиты и местоположения каждого из спутников, и он постоянно принимает обновленные данные об этих орбитах и местоположениях. На основе этой информации приемник способен определить свое местоположение (и текущее время) по точке, в которой пересекаются сферы, построенные для этих четырех спутников.
Согласно предписанию Федеральной комиссии по связи оконечные абонентские устройства (абонентские станции) (включая, но не ограничиваясь этим, подвижные абонентские устройства (станции)) в системах беспроводной связи должны быть способны оценивать свое местонахождение с тем, чтобы способствовать быстрому реагированию на вызовы в службу спасения (по номеру 911) и другие телефонные вызовы в службы экстренной помощи. В ответ на это предписание в настоящий момент прилагаются усилия для того, чтобы оснастить абонентские станции средствами, обеспечивающими оценку местонахождения этих станций на основании сигналов, передаваемых со спутников системы GPS. Кроме того, поскольку базовые станции или секторы в системах беспроводной связи передают управляющие сигналы, модулированные уникальными ПШ кодами, эти усилия также включают в себя усилия по предоставлению абонентским станциям возможности оценивать свое местонахождение на основании передаваемых сигналов со множества базовых станций или секторов или комбинаций базовых станций или секторов и спутников системы GPS. Использование базовых станций или секторов для оценки местоположения называется способом AFLT (упреждающей трилатерации следующего звена), а использование одновременно как спутников системы GPS, так и базовых станций или секторов называется гибридным способом определения местоположения.
Согласно Фигуре 1 находящийся внутри абонентской станции 100 обнаружитель сигналов пытается обнаружить передаваемый сигнал опорного источника сигнала, будь то спутника, базовой станции или сектора, исходя из максимума корреляционной функции, которую получают, умножая принятый сигнал (обычно представляющий собой составной сигнал, содержащий смесь передаваемых сигналов со множества опорных источников, таких как базовые станции/секторы 102а, 102b, 102с и/или спутники 106а, 106b, 106с) на сдвинутую версию ПШ кода, относящегося к этому опорному источнику, в диапазоне, который определен заданным окном поиска, а затем суммируя для каждого сдвинутого ПШ кода полученные умножением значения на заданном временном интервале интегрирования с целью получения значения, представляющего степень корреляции между принятым сигналом и сдвинутым ПШ кодом. Если пик обнаружен, то обнаружитель сигналов может затем из этого пика получить значения измерений одного или нескольких параметров, таких как время поступления сигнала. Как только получены четыре или более таких измерений, может быть получена оценка местоположения абонентской станции 100.
Для того чтобы определить оценку местоположения, требуется, по меньшей мере, четыре измерения. Если получены более чем четыре измерения, то оценка местоположения считается переопределенной. В ситуации, когда оценка является переопределенной, можно получить множество оценок местоположения, каждая из которых получается на основе отличного от других подмножества измерений. Кроме того, если само подмножество измерений является переопределенным, то имеется возможность проверить его на согласованность по отношению к самому себе. В ходе процедуры, известной как контроль целостности данных, определяется количественный показатель согласованности измерений, входящих в подмножество. Этот количественный показатель может быть связан с оценкой местоположения, полученной из данного подмножества, и может быть назван «ценой» оценки местоположения. Эти «цены» могут оказаться полезными при выборе одной из оценок в качестве наилучшей оценки.
Данная процедура может быть более подробно разъяснена на примере Фигуры 2. В этом примере предполагается, что измерения произведены от опорных источников 202а, 202b, 202c, 202d, 202e, 202f, и что из различных подмножеств измерений получены три оценки местоположения: pe1, pe2 и pe3. В частности, как показано на иллюстрации, оценка pe1предполагается полученной на основе измерений, произведенных от опорных источников 202а, 202b, 202c, 202d и 202e; оценка pe2 предполагается полученной на основе измерений, произведенных от опорных источников 202а, 202b, 202c, 202d и 202f; оценка pe3 предполагается полученной на основе измерений, произведенных от опорных источников 202b, 202c, 202d и 202e и 202f.
В одном примере «цена» представляет собой среднеквадратическую остаточную ошибку измерений, использованных при получении оценки местоположения. В данном примере «цена», связанная с первой оценкой pe1, может быть выражена следующим образом:

где ra, rb, rc, rd и re являются дальностями, измеренными между абонентской станцией и опорными источниками 202а, 202b, 202c, 202d и 202e, соответственно; а da,pe1, db,pe1, dc,pe1, dd,pe1 и de,pe1 являются вычисленными расстояниями между оценкой местоположения pe1 и опорными источниками 202а, 202b, 202c, 202d и 202e, соответственно.
Аналогичным образом в данном примере «цена», связанная со второй оценкой pe2, может быть выражена следующим
образом:

где rf является дальностью, измеренной между абонентской станцией и опорным источником 202f; а da,pe2, db,pe2, dc,pe2, dd,pe2 и df,pe2 являются вычисленными расстояниями между оценкой местоположения pe2 и опорными источниками 202а, 202b, 202c, 202d и 202f, соответственно.
«Цена», связанная с третей оценкой pe3, может быть выражена следующим образом:

где db,pe3, dc, pe3, dd,pe3,dе,pe3и df,pe3 являются вычисленными расстояниями между оценкой местоположения pe3 и опорными источниками 202b, 202c, 202d, 202е и 202f, соответственно.
В традиционных системах определения местоположения в качестве наилучшей оценки местоположения принимается оценка, соответствующая наименьшему значению «цены». Однако существует множество ситуаций, в которых оценка, имеющая самую низкую «цену», на самом деле не является наилучшей оценкой. Рассмотрим, например, сценарий, в котором более чем одно из измерений, использованных для вычисления оценки, имеющей самую низкую «цену», были искажены вследствие действия таких факторов, как многолучевое распространение сигнала и отсутствие прямой видимости, но при этом измерения, использованные для определения оценки, имеющей более высокую «цену», не так искажены.
Если бы искаженные измерения могли быть распознаны, то можно было бы повысить точность, исключив из рассмотрения оценки местоположения, основанные на искаженных измерениях. Однако в случае традиционного подхода, если имеется в общей сумме менее чем шесть измерений, или если было искажено более чем одно измерение, то в общем случае невозможно распознать, какие из измерений были искажены.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В изобретении предлагается способ получения оценки местоположения приемника на основе множества измерений параметра. Каждое из измерений параметра получено на основе корреляционной функции, которая в свою очередь получена путем нахождения корреляции между сигналом, принятым приемником, и идентификационным кодом, уникальным образом идентифицирующим передатчик, находящийся в зоне видимости приемника.
Первый вариант осуществления изобретения заключается в том, что получают множество оценок местоположения, причем каждую из них получают на основе отличного от других подмножества множества измерений. После этого на основе информации о местной топографии выбирают одну из оценок местоположения.
Второй вариант осуществления предлагаемого способа заключается в том, что получают множество оценок местоположения, причем каждую из них получают на основе отличного от других подмножества множества измерений. После этого получают «цену» каждой из оценок местоположения. «Цена» отражает степень согласованности измерений, использованных при получении оценки местоположения. Сразу после определения цен их корректируют на основе информации о местной топографии. После этого на основе скорректированных цен выбирают одну из оценок местоположения.
Третий вариант осуществления предлагаемого способа заключается в том, что информацию о местной топографии используют для исключения каких-либо являющихся недостоверными измерений из множества измерений. После этого получают множество оценок местоположения, причем каждую из них получают на основе отличного от других подмножества оставшихся измерений. После этого определяют «цены» для каждой из оценок местоположения, и затем в соответствии с «ценами» выбирают одну из оценок местоположения.
Четвертый вариант осуществления изобретения заключается в том, что получают множество оценок местоположения, причем каждую из них получают на основе отличного от других подмножества множества измерений. После этого на основе информации о местной топографии для каждой из оценок местоположения получают показатель достоверности. Затем на основе показателей достоверности выбирают одну из оценок местоположения.
В одном варианте осуществления изобретения идентификационные коды представляют собой псевдошумовые (ПШ) коды, а измерения представляют собой измерения времени поступления сигнала. В этом варианте осуществления изобретения получают множество оценок местоположения, каждую из которых получают на основе отличного от других подмножества измерений времени поступления сигнала.
Показатель достоверности для каждой оценки местоположения получают на основе информации о местной топографии с использованием следующей процедуры. Для каждого измерения времени поступления сигнала, из которого получают оценку местоположения, на основе информации о местной топографии оценивают ожидаемую амплитуду пика корреляционной функции, соответствующей прохождению сигнала по линии прямой видимости. Это значение затем сравнивают с амплитудой самого раннего небокового пика фактически полученной корреляционной функции. Затем на основе этого сравнения корректируют показатель достоверности.
Например, если фактически полученная амплитуда пика превышает ожидаемую амплитуду пика, то, возможно, имела место ситуация многолучевого распространения сигнала, и показатель достоверности мог бы быть уменьшен, чтобы отразить этот факт. В качестве другого примера, если амплитуда фактически полученного пика меньше, чем ожидаемая, то возможно на пути прохождения сигнала от передатчика встретились неожиданные препятствия, и показатель достоверности мог бы быть уменьшен, чтобы отразить этот факт. Этот этап повторяется для каждого из измерений, на основе которых получена оценка местоположения. Результатом является показатель достоверности для данной оценки местоположения.
Каждый из этих способов может быть в материальной форме осуществлен в виде последовательности исполняемых процессором команд, хранящихся в запоминающем устройстве, доступном для процессора. Кроме того, возможно создание систем, в состав которых входят процессор и вышеупомянутое запоминающее устройство, причем запоминающее устройство доступно для процессора, а процессор сконфигурирован с возможностью осуществления доступа к командам, хранящимся в этом запоминающем устройстве, и исполнения их.
Такого рода система может быть использована в различных средах или вариантах применения. Например, в одном варианте применения такого рода система образует часть абонентской станции и сконфигурирована с возможностью определения местоположения абонентской станции на основании одного или нескольких переданных сигналов с базовых станций, секторов, спутников системы GPS или любой комбинации этих средств. В другом варианте применения такого рода система образует часть устройства определения местоположения (УОМ, PDE), которое сконфигурировано с возможностью определения местоположения абонентской станции на основании измерений, произведенных этой абонентской станцией. Более конкретно, абонентская станция производит измерения на основании одного или нескольких переданных сигналов с базовых станций, секторов, спутников системы GPS или любой комбинации этих средств и предоставляет их устройству определения местоположения (УОМ), которое затем производит оценку местоположения абонентской станции.
Другие системы, способы, характеристики и преимущества изобретения будут или станут очевидными для специалиста в данной области техники после изучения приводимых ниже фигур и подробного описания. Подразумевается, что все такие дополнительные системы, способы, характеристики и преимущества охватываются данным описанием, находятся в пределах объема этого изобретения и защищены прилагаемой формулой изобретения.
ПЕРЕЧЕНЬ ФИГУР ЧЕРТЕЖЕЙ
Приведенные на фигурах компоненты необязательно показаны в масштабе, вместо этого акцент делается на иллюстрировании принципов изобретения. На фигурах одинаковые цифры обозначают соответствующие компоненты на всех различных изображениях.
Фигура 1 - упрощенная схема приводимой в качестве примера системы определения местоположения.
Фигура 2 - иллюстрация процесса определения множества оценок потенциального местоположения, каждую из которых получают на основе отличного от других подмножества измерений.
Фигура 3 - упрощенная схема приводимой в качестве примера системы определения местоположения, представляющей собой пример применения изобретения, являющегося предметом данной заявки.
Фигура 4 - представление во временной области примера корреляционной функции для пилот-сигнала по протоколу множественного доступа с кодовым разделением каналов (МДКР, CDMA).
Фигура 5 - представление во временной области примера корреляционной функции для пилот-сигнала по протоколу множественного доступа с кодовым разделением каналов (МДКР), этот пример отражает результаты наличия условия многолучевого распространения сигнала.
Фигура 6 - иллюстрация приводимого в качестве примера сценария, который мог бы вызвать появление корреляционной функции, показанной на Фигуре 5.
Фигура 7 - представление во временной области примера корреляционной функции для пилот-сигнала по протоколу множественного доступа с кодовым разделением каналов (МДКР), причем сигнал передается в условиях отсутствия прямой видимости.
Фигура 8 - иллюстрация приводимого в качестве примера сценария, который мог бы вызвать появление корреляционной функции, показанной на Фигуре 7.
Фигура 9 - представление во временной области примера корреляционной функции для пилот-сигнала по протоколу множественного доступа с кодовым разделением каналов (МДКР), причем сигнал передается в условиях многолучевого распространения сигнала и отсутствия прямой видимости.
Фигура 10 - иллюстрация приводимого в качестве примера сценария, который мог бы вызвать появление корреляционной функции, показанной на Фигуре 9.
Фигура 11А - упрощенная блок-схема алгоритма, иллюстрирующая первый вариант осуществления способа по данному изобретению, в котором оценка местоположения выбирается на основе информации о местной топографии.
Фигура 11В - упрощенная блок-схема алгоритма, иллюстрирующая второй вариант осуществления способа по данному изобретению, в котором оценка местоположения выбирается согласно скорректированным «ценам», определенным на основе информации о местной топографии, для множества оценок местоположения.
Фигура 12 - упрощенная блок-схема алгоритма, иллюстрирующая третий вариант осуществления способа по данному изобретению, в котором на основе учета местной топографии из рассмотрения исключаются любые недостоверные измерения.
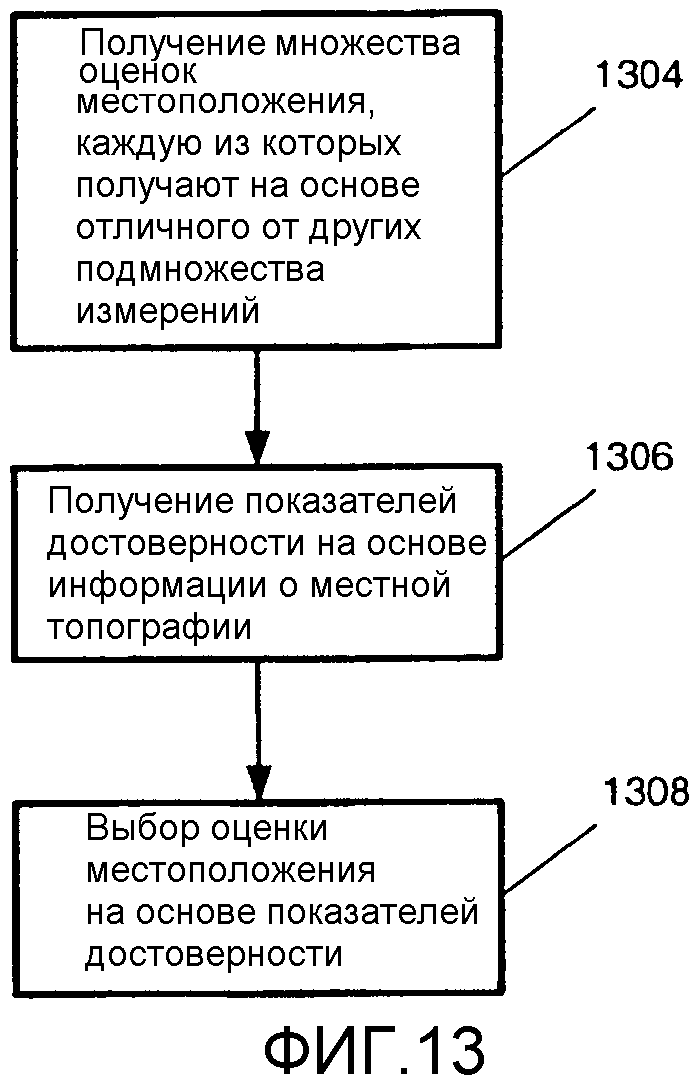
Фигура 13 - упрощенная блок-схема алгоритма, иллюстрирующая четвертый вариант осуществления способа по данному изобретению, в котором оценка местоположения выбирается согласно показателям достоверности, определенным на основе учета местной топографии.
Фигура 14 - блок-схема алгоритма, иллюстрирующая пример осуществления способа по данному изобретению.
Фигура 15 - упрощенная структурная схема абонентской станции.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Пример применения изобретения
Рассмотрим Фигуру 3, на которой проиллюстрирован пример применения изобретения. В этом примере применения изобретения абонентская станция 100 является компонентом системы беспроводной связи, например, системы сотовой связи, фиксированной системы беспроводной связи, системы персональных услуг связи (PCS) и системы спутниковой связи, но не ограничивается этим перечнем. Кроме того, система беспроводной связи может обеспечивать множественный доступ в соответствии с протоколами множественного доступа CDMA (Множественного доступа с кодовым разделением каналов, МДКР), TDMA (Множественного доступа с временным разделением каналов, МДВР), FDMA (Множественного доступа с частотным разделением каналов, МДЧР), GSM (Глобальной системы мобильной связи) или комбинациями этих протоколов.
В системе беспроводной связи используется одна или несколько базовых станций или секторов 102а, 102b и 102с. Каждая базовая станция или сектор 102а, 102b, 102с передает управляющий сигнал, модулированный повторяющимся псевдошумовым (ПШ) кодом, который уникальным образом идентифицирует базовую станцию или сектор. В системах множественного доступа с кодовым разделением каналов (МДКР), соответствующих стандарту IS-95, ПШ код представляет собой последовательность, состоящую из 32768 элементов кода, которая повторяется каждые 26,67 миллисекунды.
Также в зоне видимости абонентской станции 100 или устройства определения местоположения (УОП) 104 могут находиться один или несколько спутников 106а или 106b системы GPS. Каждый из спутников системы GPS также передает сигнал, модулированный повторяющимся ПШ кодом, который уникальным образом идентифицирует этот спутник. В современных системах GPS ПШ код представляет собой последовательность, состоящую из 1023 элементов кода, которая повторяется каждую миллисекунду.
Устройство оценки параметров сконфигурировано с возможностью оценки различных параметров пилот-сигналов, переданных с базовых станций или секторов 102а, 102b и 102с, и/или сигналов, переданных со спутников 106а, 106b системы GPS. Такие параметры могут включать в себя время поступления сигнала (ВПС, TOA), время прохождения сигнала (ВПрС), энергию элемента кода, деленную на общую принимаемую мощность (Ес/I0) и показатели достоверности для любого из вышеперечисленных параметров, включая, но не в ограничительном смысле, среднеквадратическую ошибку для одного или нескольких из этих параметров, таких как оценка времени поступления сигнала (ВПС).
Параметры, как только они оценены, и показатели достоверности, если они вычислялись, передаются в устройство 104 определения местоположения, которое в соответствии с ними оценивает местонахождение абонентской станции 100. (Устройство определения местоположения может представлять собой сервер в компьютерной сети общего пользования, такой как сеть Интернет или другая сеть на основе протокола TCP/IP (Протокола управления передачей/Межсетевого протокола), в частной сети или в какой-либо другой сети.) Устройство определения местоположения может, как часть этого процесса, осуществить взвешивание параметров по их соответствующим показателям достоверности и оценить местонахождение абонентской станции 100 с использованием взвешенных параметров. После проведения оценки, данные о местоположении абонентской станции 100 могут быть загружены в нее, или же, в случае вызова по номеру 911 или вызова других служб экстренной помощи, информация о местоположении может быть передана оператору службы экстренной помощи.
Устройство 104 определения местоположения может оценить местонахождение абонентской станции 100, исходя из измерений, полученных на основе передаваемых сигналов от базовых станций или секторов 102а, 102b и 102с, или, для повышения точности, исходя из комбинированных измерений по одной или нескольким базовой станции (базовым станциям) или сектору (секторам) 102а, 102b, 102с и одному или нескольким спутнику (спутникам) 106а, 106b системы GPS.
Устройство 104 определения местоположения может предоставлять абонентской станции 100 и другие виды помощи. Например, устройство 104 определения местоположения может постоянно отслеживать спутники системы GPS и оказывать содействие абонентской станции 100 в обнаружении передаваемых с них сигналов. Это позволяет избежать необходимости подвергать абонентскую станцию занимающим длительное время процедурам «холодного пуска», предназначенным для обнаружения спутников при включении электропитания этой станции.
В одном варианте осуществления изобретения устройство оценки параметров, входящее в состав абонентской станции 100, содержит логический блок корреляции и логический блок анализа. Для целей данного описания термин «логический блок» означает аппаратные средства, программные средства или комбинацию аппаратных и программных средств. Логический блок корреляции принимает составной сигнал, содержащий множество пилот-сигналов, переданных со множества базовых станций, секторов и/или спутников системы GPS. Каждый пилот-сигнал модулирован идентификационным кодом, который в одном примере является ПШ кодом. Идентификационный код может модулировать сигнал однократно или на повторяющейся основе. Идентификационный код, используемый для модуляции пилот-сигнала, уникальным образом идентифицирует источник пилот-сигнала, будь он базовой станцией, сектором или спутником системы GPS.
Логический блок корреляции сконфигурирован с возможностью определения, используя интервал времени интегрирования I, корреляцию между составным сигналом и сдвинутыми версиями идентификационного кода. Очевидно, что наибольшая степень корреляции будет проявляться в случаях, когда идентификационный код, использованный логическим блоком корреляции, совпадает с кодом, модулирующим пилот-сигнал, который содержится в составном сигнале. Логический блок корреляции имеет на своем выходе функцию корреляции, которая представляет корреляцию в окне поиска между сигналом и сдвинутыми версиями идентификационного кода.
В одном примере каждый отсчет сигнала S является комплексным числом, имеющим синфазную (I) и квадратурную (Q) составляющие, и сигнал S содержит множество пилот-сигналов, каждый из которых модулирован ПШ кодом. В одном варианте осуществления изобретения логический блок корреляции определяет значение корреляции С, которое зависит от используемых ПШ кода (PN) и сдвига s в ПШ коде. Значение корреляции когерентно, то есть сохраняет информацию о фазе, и является комплексным числом, которое может быть выражено следующим образом:

где N является интервалом времени (когерентного) интегрирования, выраженным в виде элементов кода, S(i) являются выборками принимаемого сигнала, а k является произвольным начальным моментом времени. В этом варианте осуществления изобретения интервал времени интегрирования I представляет собой интервал времени когерентного интегрирования N.
Во втором варианте осуществления изобретения логический блок корреляции определяет значение корреляции С, которое представляет собой действительное число и получается в результате некогерентного, то есть не сохраняющего информацию о фазе, сложения М последовательных когерентных интегрирований, каждое из которых производится над N элементами кода. В этом варианте осуществления изобретения значение корреляции может быть выражено следующим образом:


В этом варианте осуществления изобретения интервал времени интегрирования является произведением N и M.
Диапазон сдвига s, в котором производится проверка, представляет собой окно поиска W. W значений C(PN,s), взятые вместе, образуют корреляционную функцию F(PN,s), которая представляет степень корреляции между сигналом S и сдвигом s ПШ кода (PN) (где сдвиг s выражен в виде элементов кода) на требуемом окне поиска W. В том случае, если (ПШ) код модулирует сигнал на повторяющейся основе, корреляционная функция F(PN,s) будет периодической.
Фигура 4 иллюстрирует пример корреляционной функции F(PN,s) для пилот-сигнала в системе беспроводной связи множественного доступа с кодовым разделением каналов (МДКР). Размер окна (выраженный в виде элементов кода) в данном примере равен 8, и окно предполагается имеющим центр в начале координат 406. Горизонтальная ось 402 представляет сдвиг ПШ кода (PN) (выраженного в виде элементов кода), а вертикальная ось 404 представляет корреляционную функцию F(PN,s) (выраженную в виде энергии (в децибелах)). Как показано на иллюстрации, пик 408 функции в данном примере расположен в начале координат 406. Эта корреляционная функция может составлять составляющий импульс в некоторой реальной корреляционной функции.
Если пик 408 корреляционной функции является достаточно высоким и достаточно различимым на фоне шума и других искажений (которые будут обсуждаться ниже), таким, что риск ложного обнаружения сигнала сведен к приемлемому уровню, то получено успешное измерение. Логический блок корреляции может повторять этот процесс с другими ПШ кодами до тех пор, пока не будут успешно получены, по меньшей мере, четыре измерения.
После этого для каждого успешно полученного измерения логический блок анализа может вычислить оценку времени прохождения сигнала, которая в одном примере представляет собой время/расстояние, связанное с самым ранним небоковым пиком корреляционной функции, полученным в пределах окна поиска. Время/расстояние, связанное с самым ранним небоковым пиком, в общем случае используется по той причине, что оно соответствует прохождению сигнала по линии прямой видимости, а пик, связанный с прохождением сигнала по линии прямой видимости, обычно необходим для точной оценки времени поступления сигнала. Логический блок анализа может также вычислить показатель достоверности, такой как среднеквадратическая ошибка, для оценки времени поступления сигнала, и взвесить оценку времени поступления сигнала при помощи весового коэффициента, полученного на основе показателя достоверности.
Логический блок анализа может предоставить устройству 104 определения местоположения четыре или более взвешенных оценок времени поступления сигнала. В соответствии с этой информацией устройство 104 определения местоположения производит оценку местонахождения абонентской станции 100 и после этого загружает эту информацию в абонентскую станцию 100.
Изобретение, являющееся предметом данной заявки, может быть использовано в устройстве 104 определения местоположения для оценки местонахождения абонентской станции 100 в соответствии с измерениями (взвешенными или невзвешенными), которые были ему предоставлены. Однако следует иметь в виду, что возможны и другие варианты применения, в которых функция определения местоположения выполняется непосредственно в абонентской станции 100 или в другом устройстве, таком как одна или несколько базовых станций или секторов 102а, 102b, 102c. В этом случае изобретение, являющееся предметом данной заявки, может быть использовано в любом из этих других устройств в составе системы беспроводной связи.
Описание предшествующего уровня техники, рассматривающее результаты наличия многолучевого распространения сигналов и/или отсутствия прямой видимости
На Фигуре 5 приводится пример корреляционной функции F(PN,s) для пилот-сигнала в системе беспроводной связи множественного доступа с кодовым разделением каналов (МДКР), изображающий результаты наличия многолучевого распространения сигнала. Корреляционная функция для более слабо выраженного и более раннего по времени независимого поступления сигнала, представленная на фигуре штрихпунктирной линией, налагается на корреляционную функцию для более сильно выраженного независимого поступления сигнала, которая представлена на фигуре сплошной линией. Аддитивное объединение этих двух корреляционных функций могло бы представлять корреляционную функцию, полученную из реального примера составного сигнала, претерпевшего многолучевое распространение или являющегося многолучевым сигналом. Для целей данного описания «независимое» поступление сигнала подразумевает один из множества сигналов из различных источников, который поступает в пункт назначения, равно как и один из множества экземпляров одного и того же сигнала, которые поступают в пункт назаначения по различным маршрутам.
Фигура 6 иллюстрирует ситуацию, которая могла бы вызвать появление корреляционной функции, изображенной на Фигуре 5. Как показано на фигуре, прямой путь по линии прямой видимости между базовой станцией или сектором 102 и абонентской станцией 100 заблокирован препятствием 614 (в данном примере - деревом), которое ослабляет, но, тем не менее, все-таки допускает прохождение пилот-сигнала. В то же самое время благодаря многолучевому прохождению, тот же самый пилот-сигнал может отразиться от другого препятствия 616 (в данном примере - от здания) и быть принятым абонентской станцией 100 менее ослабленным, чем сигнал, поступивший напрямую по линии прямой видимости. Это отражение от препятствия 616 могло бы вызвать появление корреляционной функции, представленной на Фигуре 5 сплошной линией, в то время как экземпляр сигнала, прошедший напрямую по линии прямой видимости через препятствие 614, мог бы вызвать появление корреляционной функции, представленной на Фигуре 5 штрихпунктирной линией.
Возвращаясь к Фигуре 5, отметим, что наличие многолучевого распространения сигнала усугубляет сложность нахождения самого раннего небокового пика корреляционной функции, который на Фигуре 5 является пиком, обозначенным числом 512. Причина этого заключается в том, что этот пик может быть сложно отличить от боковых лепестков корреляционной функции, представляющей отраженный сигнал, показанный на Фигуре 6, боковые лепестки которого обозначены числом 518. Соответственно, будет существовать риск того, что логический блок анализа в устройстве оценки параметров либо будет ошибочно интерпретировать такого рода боковой лепесток как пик корреляционной функции, соответствующей поступлению сигнала по линии прямой видимости, либо стал бы ошибочно интерпретировать пик этой корреляционной функции как боковой лепесток, полученный от поступления, более позднего по времени. В любом случае вытекающая из этого оценка времени поступления сигнала будет искажена.
На Фигуре 7 изображен пример корреляционной функции, полученной на основе пилот-сигнала в системе беспроводной связи множественного доступа с кодовым разделением каналов (МДКР), причем, этот пример отражает результат действия условия отсутствия прямой видимости, такого как то, что могло бы проистекать из сценария, изображенного на Фигуре 8. Здесь, как показано на этой фигуре, препятствие 804 полностью блокирует прохождение сигнала по линии прямой видимости от базовой станции 102 к абонентской станции 100. Однако передаваемый сигнал от базовой станции 102, идущий не по линии прямой видимости, отражается от здания 802 и принимается абонентской станцией 100. Это прохождение сигнала не по линии прямой видимости вызывает появление корреляционной функции, изображенной на Фигуре 7.
В данном случае точную оценку времени поступления сигнала сложно получить по той причине, что в корреляционной функции не присутствует пик, соответствующий прохождению сигнала по линии прямой видимости. Более того, поскольку пик 702 представляет собой самый ранний небоковой пик, изображенный на Фигуре 7, существует риск, что логический блок анализа будет использовать время/расстояние, связанное с пиком 702, при определении оценки времени поступления для пилот-сигнала. Поскольку этот пик не связан с прохождением сигнала по линии прямой видимости, оценка времени поступления сигнала будет искажена.
Фигура 9 иллюстрирует корреляционную функцию, отражающую комбинацию условий многолучевого распространения сигнала и отсутствия прямой видимости, которые могут иметь место в системе беспроводной связи по протоколу множественного доступа с кодовым разделением каналов (МДКР). Фигура 10 иллюстрирует пример сценария, который мог бы вызвать появление корреляционной функции, проиллюстрированной на Фигуре 9. Как показано на фигуре, передача по линии прямой видимости от базовой станции 102 к абонентской станции 100 полностью заблокирована зданием 604. Однако в абонентской станции 100 принимаются два отраженных передаваемых сигнала от базовой станции 102. Первый из них, который отражен от здания 612, является более ранним по времени поступлением, при этом предполагается, что он вызывает появление пика 902, показанного на Фигуре 9 пунктирной линией. Второй из них, который отражается от здания 602, является более поздним по времени поступлением, при этом предполагается, что он вызывает появление пика 904, показанного на Фигуре 9.
В данном случае получить точную оценку времени поступления опять сложно, поскольку пик, соответствующий прохождению сигнала по линии прямой видимости, не присутствует в корреляционной функции. Более того, поскольку пик 902 является самым ранним небоковым пиком, существует риск того, что логический блок анализа будет использовать время/расстояние, связанное с ним, при оценке времени поступления сигнала. Поскольку этот пик не связан с прохождением сигнала по линии прямой видимости, оценка времени для анализа будет соответствующим образом искажена.
Варианты осуществления изобретения
Изобретение предлагает способ получения оценки местоположения приемника на основе множества измерений параметра. Каждое из измерений параметра получено на основе корреляционной функции, которая в свою очередь получена путем нахождения корреляции между сигналом, принятым приемником, и идентификационным кодом, уникальным образом идентифицирующим передатчик, находящийся в зоне видимости приемника.
Рассмотрим Фигуру 11А, на которой проиллюстрирован первый вариант осуществления этого способа. На этапе 1100 в данном варианте осуществления этого способа получают множество оценок местоположения, причем каждую из них получают на основе отличного от других подмножества множества измерений. От этапа 1100 в рассматриваемом способе осуществляется переход к этапу 1102. На этом этапе на основе информации о местной топографии выбирают одну из оценок местоположения.
Второй вариант осуществления этого способа проиллюстрирован на Фигуре 11В. Как показано на фигуре, данный вариант осуществления этого способа начинается с этапа 1104, на котором получают множество оценок местоположения, причем каждую из них получают на основе отличного от других (хотя, возможно, и пересекающегося с другими) подмножества множества произведенных измерений. Например, если были произведены шесть измерений A, B, C, D, E и F, то этап 1104 мог бы включать в себя получение шести оценок местоположения на основе каждого из следующих подмножеств измерений: 1) A, B, C, D, E; 2) A, B, C, D, F; 3) A, B, C, E, F; 4) A, B, D, E, F; 5) A, C, D, E, F; 6) B, C, D, E, F.
От этапа 1104 в рассматриваемом способе осуществляется переход к этапу 1106, на котором получают «цену» каждой из оценок местоположения, определенных на этапе 1104. Для целей данного описания «цена» оценки представляет собой любую меру согласованности измерений, использованных при получении данной оценки, и включает среднеквадратические остаточные ошибки измерений, но не ограничивается ими.
От этапа 1106 в рассматриваемом способе осуществляется переход к этапу 1108, на котором каждую из «цен», определенных на этапе 1104, корректируют на основе информации о местной топографии.
В одной реализации данного варианта осуществления изобретения каждая «цена» корректируется с использованием следующей процедуры. Во-первых, выбирается одно из измерений, использованных для получения соответствующей оценки местоположения, и производится обращение к базе данных, представляющей местную топографию, с тем, чтобы определить любые препятствия на пути прохождения сигнала по линии прямой видимости от соответствующего опорного источника сигнала до приемника. В качестве дополнительной возможности, также определяются любые препятствия, которые могут вызвать отраженное прохождение сигналов в приемник. Исходя из этой информации, определяется ожидаемая корреляционная функция для опорного источника сигнала, и она сравнивается с фактически полученной корреляционной функцией. На основании этого сравнения можно корректировать «цену» оценки, определенную на этапе 1106. Эта процедура повторяется для каждого из измерений, использованных для получения оценки местоположения. Результатом является скорректированная «цена» для оценки местоположения.
В одном примере реализации данного варианта изобретения определяются препятствия, мешающие прохождению сигнала по линии прямой видимости, и определяется ожидаемая величина ослабления сигнала в приемнике относительно сигнала, прошедшего из опорного источника по линии прямой видимости. Затем на основе этой информации для корреляционной функции, являющейся результатом прохождения сигнала по линии прямой видимости, определяется ожидаемая амплитуда пика и сравнивается с амплитудой самого раннего небокового пика фактически полученной корреляционной функции. Если имеется расхождение, то «цена» может быть скорректирована в сторону своего увеличения, при этом величина коррекции зависит от степени расхождения. Если имеется совпадение или почти совпадение, то «цена» может быть скорректирована в сторону своего уменьшения или оставлена на прежнем уровне. Эта процедура повторяется для каждого из измерений, на основе которых получена оценка местоположения. Результатом является скорректированная «цена» для оценки местоположения.
Рассмотрим, например, ситуацию, в которой фактически полученная амплитуда пика превышает ожидаемую амплитуду пика. В этой ситуации возможно наличие условия многолучевого распространения сигнала. Следовательно, чтобы отразить этот факт, «цена» должна быть увеличена. В качестве другого примера, рассмотрим ситуацию, в которой фактически полученная амплитуда пика меньше, чем ожидаемая амплитуда пика. В этой ситуации на пути сигнала по линии прямой видимости от передатчика могли находиться неожиданные препятствия. Следовательно, чтобы отразить этот факт, «цена» должна быть уменьшена.
Во втором примере реализации данного варианта осуществления изобретения производят на основе учета препятствий, присутствие которых на пути прохождения сигнала по линии прямой видимости ожидается, оценку ожидаемой формы корреляционной функции, получаемой от прохождения сигнала по линии прямой видимости. Полученная в результате оценки форма могла бы также отражать ожидаемые воздействия многолучевого распространения сигнала, определяемые на основе учета препятствий, которые, как ожидается, вызовут отраженное прохождение сигнала в приемник. После своего определения, полученная в результате оценки форма сравнивается с фактически полученной формой. И вновь «цена» может быть скорректирована в соответствии с результатами сравнения. Как и в ранее описанном случае эта процедура должна быть повторена для каждого из измерений, на основе которых получена оценка местоположения. Результатом является скорректированная «цена» для оценки местоположения.
Обратимся вновь к Фигуре 11В, из которой видно, что от этапа 1108 в рассматриваемом способе осуществляется переход к этапу 1110. На этапе 1110 в соответствии со скорректированными «ценами» производится выбор оценки местоположения. В одном примере на этом этапе выбирают оценку местоположения с самым низким значением скорректированной «цены».
Фигура 12 иллюстрирует третий вариант осуществления способа по данному изобретению. В этом варианте осуществления способ начинается с этапа 1204, на котором на основе учета местной топографии из рассмотрения исключают любые недостоверные измерения (из множества полученных измерений).
В одной реализации данного варианта осуществления изобретения на этом этапе производят для каждого измерения обращение к базе данных, представляющей информацию о местной топографии, с тем, чтобы определить любые препятствия, которые, как ожидается, будут присутствовать на пути прохождения сигнала по линии прямой видимости от соответствующего передатчика, и/или которые, как ожидается, вызовут отраженное прохождение сигнала в приемник. В соответствии с этой информацией вычисляют ожидаемую корреляционную функцию для этого передатчика и сравнивают ее с фактически полученной корреляционной функцией. В соответствии с результатами этого сравнения измерение либо исключают как недостоверное, либо сохраняют.
В одном примере реализации данного варианта осуществления изобретения вычисляется ожидаемое ослабление при прохождении сигнала от передатчика по линии прямой видимости и, исходя из этого, определяется ожидаемая амплитуда корреляционной функции, являющейся результатом прохождения сигнала по линии прямой видимости. Эта оценка сравнивается с амплитудой самого раннего небокового пика в фактически полученной корреляционной функции. Если имеется в достаточной мере существенное расхождение, то измерение может быть отвергнуто как недостоверное.
Во втором примере реализации данного варианта осуществления изобретения вычисляют ожидаемую форму корреляционной функции для данного приемника и сравнивают ее с формой фактически полученной корреляционной функции. На основе этого сравнения измерение может быть отвергнуто как недостоверное.
Обратимся вновь к Фигуре 12, из которой видно, что от этапа 1204 в рассматриваемом способе осуществляется переход к этапу 1206. На этапе 1206 в рассматриваемом способе получают оценки местоположения на основе различных подмножеств оставшихся измерений. От этапа 1206 в рассматриваемом способе осуществляется переход к этапу 1208, на котором получают «цены» для каждой из этих оценок местоположения. От этапа 1208 в рассматриваемом способе осуществляется переход к этапу 1210, на котором на основе этих «цен» выбирают одну из оценок. В одной реализации данного варианта осуществления изобретения на этом этапе в качестве наилучшей оценки выбирают оценку местоположения с самым низким значением «цены».
Фигура 13 иллюстрирует четвертый вариант осуществления способа по данному изобретению. В этом варианте осуществления способ начинается с этапа 1304, на котором получают множество оценок местоположения, причем каждую из них получают на основе отличного от других подмножества множества полученных измерений.
От этапа 1304 в рассматриваемом способе осуществляется переход к этапу 1306, на котором для вычисления показателей достоверности для каждой из оценок местоположения, полученных на этапе 1304, используют информацию о местной топографии.
От этапа 1306 в рассматриваемом способе осуществляется переход к этапу 1308, на котором в соответствии с показателями достоверности, определенными на этапе 1304, выбирают некоторую оценку местоположения в качестве лучшей оценки.
Показатели достоверности могут представлять собой прямо пропорциональную или обратно пропорциональную меру достоверности соответствующей оценки местоположения. В случае, когда показатель достоверности прямо пропорционален достоверности оценки местоположения, на этапе 1308 можно в качестве наилучшей оценки выбрать оценку местоположения с самым высоким показателем достоверности. В случае, когда показатель достоверности представляет собой обратную меру достоверности оценки местоположения, на этапе 1308 можно в качестве наилучшей оценки выбрать оценку местоположения с самым низким показателем достоверности.
В одной реализации данного варианта осуществления изобретения на этапе 1306 для каждого измерения, использованного для получения оценки местоположения, производят обращение к базе данных, представляющей информацию о местной топографии, с тем, чтобы определить любые препятствия, расположенные на пути прохождения сигнала по линии прямой видимости от соответствующего передатчика, и/или любые препятствия, которые могли бы вызвать отраженное прохождение сигналов в приемник. В соответствии с этой информацией вычисляют ожидаемую корреляционную функцию для этого передатчика и сравнивают ее с фактически полученной корреляционной функцией. В соответствии с результатами этого сравнения показатель достоверности для данной оценки может быть скорректирован. Эта процедура повторяется для каждого из измерений, на основе которых получена оценка местоположения. Результатом является скорректированный показатель достоверности для оценки местоположения. Аналогичным образом получают показатель достоверности для каждой из других оценок местоположения.
В одном примере для каждого измерения, использованного для получения оценки местоположения, производят обращение к базе данных, с целью определения любых препятствий, расположенных на пути прохождения сигнала по линии прямой видимости от передатчика. Исходя из этой информации оценивают ожидаемое ослабление сигнала при прохождении сигнала по линии прямой видимости от соответствующего передатчика и определяют ожидаемую амплитуду корреляционной функции для прохождения сигнала по линии прямой видимости. Ожидаемую амплитуду сравнивают с амплитудой самого раннего небокового пика в фактически полученной корреляционной функции, и показатель достоверности оценки соответствующим образом корректируют. Например, если сравнение показывает, что имеется или вероятно наличие условий многолучевого распространения сигнала или отсутствия прямой видимости, то показатель достоверности мог бы быть скорректирован в сторону своего увеличения или уменьшения в зависимости от того, является ли этот показатель обратной или пропорциональной мерой достоверности. В другом примере сравнение для каждого измерения включает в себя сравнение ожидаемой и фактически полученной формы соответствующей корреляционной функции и соответствующую коррекцию корреляционной функции.
И вновь эта процедура повторяется для каждого из измерений, на основе которых получена оценка местоположения, что дает показатель достоверности для этой оценки. После этого вся эта процедура полностью повторяется для каждой из оценок, полученных на этапе 1304, что дает показатели достоверности для всех оценок.
Фигура 14 иллюстрирует пример осуществления способа по данному изобретению.
Процедура начинается с этапа 1400, за которым следует этап 1401.
На этапе 1401 получают множество измерений. Элементы множества измерений включают в себя измерения, произведенные от некоторого количества опорных точек, например, от спутников системы GPS, базовых станций систем сотовой связи, наземных сотовых устройств измерения и т.д. Элементы множества измерений могут также представлять собой множественные измерения для любой заданной опорной точки. Они могут включать в себя независимые или связанные между собой измерения, или множество гипотез для одного измерения, такое как множество корреляционных пиков. Каждое измерение может быть снабжено весовым коэффициентом, таким как оценка среднеквадратической ошибки.
За этапом 1401 в данном способе следует этап 1402. На этапе 1402 выясняется вопрос о том, все ли возможные подходящие подмножества множества измерений были рассмотрены. Подходящее подмножество содержит количество независимых измерений, достаточное для получения решения (решений) задачи определения местоположения. От решения не требуется, чтобы оно было полностью определенным. Подходящее подмножество обычно не содержит измерений, которые известны как противоречащие друг другу, таких как множественные пики корреляционной функции.
Если ответом является «нет», то управление передается на этап 1403. На этапе 1403 производят выбор подмножества.
За этапом 1403 следует этап 1404. На этапе 1404 при помощи соответствующего навигационного алгоритма вычисляют решение задачи определения местоположения. Навигационный алгоритм может при вычислении использовать весовые коэффициенты измерений. На выходе навигационного алгоритма может быть единственная точка в случае полностью определенного или переопределенного решения, или конечное множество точек, если существует неоднозначное решение, или даже бесконечное множество точек в случае недоопределенного решения. Примером последнего случая является ситуация, когда используются измерения псевдодальности для трех спутников системы GPS, и в этом случае решением будет множество точек, образующих кривую линию. Для таких множеств точек при помощи соответствующих гипотез должны устанавливаться границы. Например, негоризонтальная кривая линия может быть ограничена при помощи допущения об определенном интервале высот (вспомогательные условия по высоте). Степень ограничения определяется посредством компромисса между временем, затрачиваемым на вычисление, и требуемой достоверностью результата.
За этапом 1404 следует этап 1405. На этапе 1405 множество точек, определенных на этапе 1404, расширяют так, как того требует собственная неопределенность измерений. Каждую точку решения обычно расширяют до некоторого эллипсоида неопределенности. Параметры, описывающие этот эллипсоид, являются результатами навигационного алгоритма и зависят от среднеквадратических оценок индивидуальных измерений и геометрии опорных точек. Если решение навигационной системы уравнений дает более чем одну точку, то объединенное расширение определяют как объединение областей неопределенности, установленных для каждой точки.
За этапом 1405 следует этап 1406. На этапе 1406 расширенное множество, полученное на этапе 1405, разделяют на области. Каждая область представлена в приводимом ниже алгоритме своим геометрическим центром. Размер областей определяется компромиссом между временем, затрачиваемым на вычисления, и требуемой точностью.
От этапа 1406 управление передается на этап 1407. На этапе 1407 выясняется вопрос о том, все ли области проверены.
Если ответом является «нет», то выполняют этап 1408. На этапе 1408 выбирают область.
За этапом 1408 следует этап 1409. На этапе 1409 определяют априорную вероятность, связанную с выбранной областью. Априорную вероятность вычисляют на основе:
1. Информации о конкретном месте, относящемся к этой области. Она включает в себя все априорные знания о местном окружении. Например, если к области в прошлом относились более частые запросы об определении местоположения, то она должна иметь более высокое значение присвоенной ей вероятности. Также, если на этапе 1404 было использовано недоопределенное решение, то при ограничении результирующего бесконечного множества точек, результирующее множество, как правило, не имеет равномерного распределения вероятности. Например, если было использовано вспомогательное условие по высоте, то, как правило, вероятность по краям диапазона высот меньше, чем на его середине.
2. Расположения области относительно решения, полученного в навигационном алгоритме. При расширении решения на этапе 1405, область неопределенности имеет некоторое связанное с ней распределение вероятности (например, трехмерное гауссовское распределение в случае эллипсоида неопределенности), которое может быть использовано в виде коэффициента в априорной вероятности области. Если решение навигационной системы уравнений дало более чем одну точку, то конкретная область может оказаться в области неопределенности нескольких точек решения. В этом случае объединенная вероятность рассчитывается на основе правил условной вероятности.
3. Суммы весовых коэффициентов измерений, использованных в навигационном алгоритме.
4. Значения «цены», установленной навигационным алгоритмом для этого решения.
За этапом 1409 следует этап 1410. На этапе 1410 выясняется вопрос о том, все ли измерения подмножества измерений, выбранного на этапе 1403, были рассмотрены.
Если ответ - «нет», то выполняется этап 1411. На этапе 1411 выбирают измерение.
За этапом 1411 следует этап 1412. На этапе 1412 рассчитывают прогнозируемый уровень принятого сигнала. Этот расчет основан на знании места расположения приемника (который находится в центре области, выбранной на этапе 1408), места расположения источника сигнала (которое может быть определено, например, на основе эфемеридной информации и, возможно, разностных поправок для спутников системы GPS), а также на знании местной топографии. После проведения линии прямой видимости от места расположения приемника до места расположения источника сигнала могут быть определены любые возможные препятствия. На основе типа препятствия и протяженности заблокированного пути определяют коэффициент отклонения и учитывают его в ожидаемом значении коэффициента ослабления. Знание местной топографии может включать в себя также и знание об архитектурных объектах. Например, если путь сигнала блокирует здание, то следует ожидать значительное ослабление сигнала. Это ослабление сигнала может быть смоделировано как в высокой степени "нелинейное". Например, если требуемая глубина проникновения сигнала внутрь здания является малой, то можно предположить, что приемник расположен близко от окна и принимает сигналы через окно, что означало бы небольшое ослабление сигнала. Следует предположить, что тот же приемник отметит значительно более сильное ослабление сигнала в случае, если источник сигнала располагается по диагонали с противоположной от приемника стороны здания, поскольку в этом случае сигнал должен пройти через внутреннюю структуру здания. Эти предположения могут быть легко отражены в "нелинейной" модели ослабления сигнала на пути его прохождения, в которой блокирование длинного участка пути давало бы даже еще более высокое ожидаемое значение коэффициента ослабления сигнала по сравнению с блокированием короткого участка пути, чем то, что получалось бы на основе модели с равномерным ослаблением сигнала. Наряду с ожидаемым значением коэффициента ослабления рассчитывают и среднеквадратическую оценку ошибки оценивания. Если путь сигнала пересекает множество объектов, то рассчитывают коэффициент суммарного ослабления сигнала и суммарную среднеквадратическую ошибку.
Ослабление сигнала также включает в себя ослабление при прохождении сигнала в свободном пространстве, которое может быть рассчитано, поскольку предполагаемое расстояние от приемника до источника сигнала известно.
Следует иметь в виду, что поскольку приемник обычно наблюдает базовую станцию под малыми углами возвышения, может оказаться полезным приблизительно рассчитывать ослабление сигнала, идущего с базовых станций сотовой связи, при помощи общей функции ослабления сигнала от расстояния между приемником и источником сигнала. Эта функция может быть выбрана на основе знания окружающей местности или на основе собранных статистических данных. Для спутников, которые, как правило, наблюдаются под более высокими углами возвышения, в расчетах следует использовать конкретный путь прохождения сигнала и ожидаемое блокирование его участков.
После того как ожидаемое значение коэффициента ослабления сигнала определено, его умножают на номинальную мощность источника сигнала, что дает ожидаемый уровень принимаемого сигнала. Для спутников номинальная мощность источника сигнала известна, для базовых станций систем сотовой связи она, возможно, может быть считана из служебных сообщений, передаваемых базовой станцией. Если передача таких сообщений не производится, то может использоваться некоторое оценочное значение. Любая неопределенность в отношении мощности источника сигнала должна быть отражена в оценке среднеквадратической ошибки уровня принимаемого сигнала.
От этапа 1412 управление передается на этап 1413. На этапе 1413 производят сравнение фактического уровня принимаемого сигнала со спрогнозированным уровнем принимаемого сигнала и вычисляют условную вероятность. Низкая вероятность могла бы быть результатом либо наблюдения сигнала со значительно более высокой мощностью, чем ожидалось, которая указывала бы на то, что обнаруженный сигнал, вероятно, является сигналом, претерпевшим многолучевое распространение (поскольку ожидается, что сигнал, идущий по линии прямой видимости блокирован); либо наблюдения сигнала со значительно более низкой мощностью, чем ожидалось. В любом случае степень уверенности в области, выбранной на этапе 1408 (и являющейся местом, в котором взяты измерения, выбранные на этапе 1411), является низкой.
Если опрос на этапе 1410 показывает, что рассмотрены все измерения из подмножества, выбранного на этапе 1403, то на этапе 1414 вычисляют объединенную вероятность. Это вычисление основано на результатах, полученных на этапе 1413.
От этапа 1414 управление передается на этап 1415. На этапе 1415 на основе результатов, полученных на этапах 1409 и 1414, вычисляют объединенную вероятность, и после этого управление передается назад, на этап 1407.
Если опрос на этапе 1407 показывает, что проверены все области, то выполняют этап 1416. На этом этапе выбирают и регистрируют ту область, для которой на этапе 1415 было получено максимальное значение вероятности. Геометрический центр зарегистрированной области будет решением задачи определения местоположения, связанным с подмножеством измерений, выбранным на этапе 1403, и вероятность этой области будет вероятностью, присвоенной данному подмножеству измерений. От этапа 1416 управление передается назад на этап 1402.
Если опрос на этапе 1402 показывает, что проверены все подмножества измерений, то выполняют этап 1417. На этом этапе выбирают подмножество измерений с самым высоким значением вероятности, а связанное с ним местоположение объявляют решением задачи определения местоположения.
После этого процедура завершается на этапе 1418.
Не все этапы, описанные выше, являются обязательными для функционирования этого способа. Если некоторые наборы данных недоступны, то соответствующие этапы могут быть опущены.
Любые из вышеописанных способов могут находить свое материальное осуществление в разнообразных формах, включая, но не в качестве ограничения, форму, в которой последовательность команд, осуществляющая способ, хранится на или в запоминающем устройстве или сервере в компьютерной сети, такой как сеть Интернет, в которых способ осуществлен в виде синтезированной логики, или в которых способ осуществлен в виде программного изделия для компьютера, то есть в виде программного сегмента или модуля.
Кроме того, возможно создание систем, содержащих процессор, сконфигурированный с возможностью осуществления доступа к запоминающему устройству, осуществляющему любой из вышеописанных способов, для получения и исполнения команд, хранящихся в этом запоминающем устройстве. Например, в одном варианте применения изобретения такая система расположена в абонентской станции и сконфигурирована с возможностью определения местоположения абонентской станции на основании одного или нескольких переданных сигналов с базовых станций, секторов, спутников системы GPS или любой комбинации этих средств. В другом варианте применения изобретения такого рода система расположена в устройстве определения местоположения (УОМ) и сконфигурирована с возможностью определения местоположения абонентской станции, которая производит измерения на основании одного или нескольких переданных сигналов с базовых станций, секторов, спутников системы GPS или любой комбинации этих средств и предоставляет их устройству определения местоположения, которое затем производит оценку местоположения абонентской станции.
Для целей данного описания «процессором» может быть любое устройство, способное выполнять последовательность команд, осуществляющих некоторую процедуру, включая, но не в ограничительном смысле, компьютер, микропроцессор, интегральную схему, специализированную по применению, конечный автомат, устройство цифровой обработки сигналов или какое-либо другое устройство.
Кроме того, термин «запоминающее устройство» в том значении, в котором он используется в данном описании, может означать любое устройство, пригодное для считывания с него информации компьютером и способное хранить последовательность команд, осуществляющих некоторую процедуру, включающее в себя, но не в ограничительном смысле, оперативное запоминающее устройство (ОЗУ, RAM), постоянное запоминающее устройство (ПЗУ, ROM), стираемое программируемое постоянное запоминающее устройство (СППЗУ, EPROM), электрически-стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ, EEPROM), программируемое постоянное запоминающее устройство (ППЗУ, PROM), диск (жесткий магнитный диск или дискету), постоянное запоминающее устройство на компакт-диске (CD-ROM), универсальный цифровой диск (DVD), флэш-память и т.п.
Рассмотрим Фигуру 15, на которой проиллюстрирована упрощенная структурная схема одного приводимого в качестве примера варианта осуществления абонентской станции. В данном конкретном примере число 1502 обозначает процессор, сконфигурированный с возможностью выполнения команд программ, а число 1504 обозначает запоминающее устройство, предназначенное для хранения команд программ и данных, включая команды программ, осуществляющие способ по данному изобретению.
Число 1506 обозначает постоянное запоминающее устройство, предназначенное для хранения предоставляемой информации, полезной для роуминга и/или регистрации и прекращения регистрации в системе.
Числа 1508 и 1510 обозначают, соответственно, клавиатуру и устройство отображения, которые обычно предусматриваются как часть пользовательского интерфейса.
Числа 1512 и 1514 обозначают, соответственно, микрофон и громкоговоритель, которые обычно предусматриваются для поддержания вариантов использования, включающих передачу и прием речевой информации.
Число 1516 обозначает радиоустройство, выполненное с возможностью приема и передачи информации на частотах радиодиапазона через беспроводное соединение согласно одному или нескольким протоколам множественного доступа, таким как протокол CDMA (Множественного доступа с кодовым разделением каналов (МДКР)), протокол GSM (Глобальной системы мобильной связи), протокол WCDMA (Широкополосного множественного доступа с кодовым разделением каналов (ШМДКР)), протокол AMPS (Усовершенствованной системы мобильной телефонии), протокол TDMA (Множественного доступа с временным разделением каналов (МДВР)), протокол PCS (Услуг персональной связи) или комбинации этих протоколов, но, не ограничиваясь ими.
Число 1518 обозначает модем, который выполнен с возможностью осуществления повышающего частоту преобразования голоса (и данных) от частот основной полосы к частотам радиодиапазона и понижающего частоту преобразования от частот радиодиапазона к частотам основной полосы.
Число 1520 обозначает коррелятор, который сконфигурирован с возможностью получения корреляционной функции из принятого сигнала способом, описанным выше.
Число 1522 обозначает базу данных, представляющую информацию о местной топографии, обращение к которой можно производить с помощью процессора 1502.
В данном конкретном примере процессор 1502 получает измерения на основе корреляционных функций, предоставляемых коррелятором 1520. После этого для осуществления способа по данному изобретению процессор 1502 выполняет команды программ, хранящиеся в запоминающем устройстве 1504, обращаясь при этом к базе данных 1522. В завершение данной процедуры определяется оценка местоположения абонентской станции.
При применении способа, представленного любыми из этих вариантов осуществления, реализаций или примеров, к измерениям или оценкам местоположения, получаемым на основе этих измерений, значительно повышается эффективность, поскольку теперь искажения, вызванные такими факторами, как многолучевое распространение сигнала и отсутствие прямой видимости, могут быть учтены с высокой точностью.
Хотя описаны различные варианты осуществления изобретения, специалистам обычного уровня квалификации в данной области техники будет понятно, что возможны и многие другие варианты осуществления и реализации, которые охватываются объемом данного изобретения.
Реферат
Предлагается система и способ получения оценки местоположения приемника на основе множества измерений параметра. Каждое измерение получают из корреляционной функции, которая в свою очередь получена посредством нахождения корреляции сигнала, принятого в приемнике, с идентификационным кодом, уникальным образом идентифицирующим передатчик, находящийся в зоне видимости приемника. Получают множество оценок местоположения, каждую из которых получают на основе отличного от других подмножества измерений. На основе информации о местной топографии выбирают одну из оценок местоположения в качестве самой лучшей оценки местоположения приемника, что и является достигаемым техническим результатом изобретения. 12 н. и 40 з.п. ф-лы, 16 ил.

Формула
Документы, цитированные в отчёте о поиске
Способ обнаружения местоположения мобильного терминала в сотовой телекоммуникационной системе и локатор мобильного терминала
Комментарии