Радиоприемник для определения местоположения источника сигнала - RU2669700C1
Код документа: RU2669700C1
Чертежи



















Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная заявка испрашивает приоритет по заявке на патент США №62/113,700, поданной 9 февраля 2015 года. Содержание вышеуказанной заявки включено в этот документ путем ссылки в полном объеме.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Изобретение в целом относится к радиоприемникам. В частности, это изобретение относится к системам и способам обеспечения радиосистемы, выполненной с возможностью определять местоположение источника сигнала с высокой точностью.
УРОВЕНЬ ТЕХНИКИ
[0003] Программно определяемая радиосистема (SDR) представляет собой программируемую реконфигурируемую систему, обеспечивающую гибкую и расширяемую архитектуру. Такая радиосистема, как правило, поддерживает множество различных форм сигнала, способствуя, таким образом, улучшенной связи между пользователями, такими как государственные учреждения и государственные службы. SDR, как правило, содержит единую аппаратную платформу, способную выполнять множество функций на основе загруженных в нее программных приложений. SDR использует установленные программные приложения для выполнения функций обработки радиосигналов. Перестройка частоты, фильтрация, синхронизация, кодирование и модуляция выполняются в программном обеспечении на высокоскоростных перепрограммируемых устройствах (например, цифровые сигнальные процессоры (DSP), программируемые пользователем вентильные матрицы (FPGA) и процессоры общего назначения (GPP)).
[0004] В центре технологии SDR находится архитектура программного обеспечения, на основе которой должны быть созданы радиосистемы и реализованы протоколы связи. Существует множество проприетарных архитектур, однако для обеспечения переносимости и функциональной совместимости протоколов различных радиосистем была разработана открытая архитектура. Открытая архитектура называется архитектурой программной связи (SCA). SCA содержит набор спецификаций, описывающих взаимодействие между различными программными и аппаратными компонентами радиосистемы и обеспечивающих программные команды для их управления. Соответственно, SCA представляет собой общие принципы открытой архитектуры, определяющие, как должны взаимодействовать между собой аппаратные и программные компоненты, чтобы разные производители и разработчики могли легко интегрировать соответствующие компоненты в одном устройстве.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0005] Настоящее изобретение относится к системам и способам определения точного местоположения источника сигнала передачи. Способы содержат: демодуляцию, с помощью приемника устройства связи, обнаруженного несущего сигнала, модулированного с помощью последовательности кода псевдошума (PN), для получения из него исходного несущего информацию сигнала; вычисление, с помощью приемника, смещений временной задержки с использованием корреляций окон кода PN для каждого символа исходного несущего информацию сигнала; определение, с помощью приемника, высокоточного времени прибытия (ТОА) обнаруженного несущего сигнала с использованием смещений временной задержки; и использование, с помощью приемника, высокоточного ТОА для определения точного местоположения источника исходного несущего информацию сигнала передачи.
[0006] В некоторых сценариях демодуляция содержит: обнаружение отклонения фазы из обнаруженного несущего сигнала; удаление отклонения фазы из обнаруженного несущего сигнала; выполнение раннего/позднего стробирующего слежения для восстановления фазы тактовой синхронизации символов обнаруженного несущего сигнала; и выполнение демодуляции обнаруженного несущего сигнала с использованием его восстановленной тактовой синхронизации символов для извлечения из него исходного несущего информацию сигнала.
[0007] В этих или других сценариях способ дополнительно содержит: аппроксимацию, с помощью кривой, смещений временной задержки для построения аппроксимирующей кривой, имеющей наилучшую аппроксимацию для серии точек данных, определяющих смещения временной задержки; и экстраполяцию неизвестных смещений временной задержки с использованием аппроксимирующей кривой. Высокоточное ТОА определяют с использованием неизвестных смещений временной задержки, экстраполированных с использованием аппроксимирующей кривой. Высокоточное ТОА уточняют путем: определения положения спутника; вычисления атмосферной и релятивистской задержки, повлиявшей на обнаруженный несущий сигнал в течение его передачи с использованием положения спутника; и применения атмосферной и релятивистской задержки к высокоточному ТОА для генерирования уточненного ТОА. Уточненное ТОА затем используют для определения точного местоположения источника исходного, несущего информацию сигнала.
[0008] В этих или других сценариях высокоточное ТОА определяют путем: определения, посредством обнаружения сигнала, приблизительного ТОА и приблизительной частоты прибытия (FOA) для выборки исходного несущего информацию сигнала; выполнения процесса многокаскадного понижающего преобразования с использованием, по меньшей мере, выборок, связанных с приблизительной FOA в точке обнаружения, для удаления допплеровского эффекта из исходного несущего информацию сигнала; взаимной корреляции первого набора выборок из исходного несущего информацию сигнала со вторым набором выборок из локальной копии последовательности кода PN для определения пика взаимной корреляции; использования пика взаимной корреляции для нахождения первого временного центра пика для импульса для каждого символа исходного несущего информацию сигнала; использования пика корреляции для нахождения первого временного центра пика для каждого символа исходного несущего информацию сигнала; использования первого временного центра пика для получения набора первых оценочных символов; использования набора первых оценочных символов для получения значения, представляющего удвоенную частоту центра; и понижающего преобразования набора выборок с использованием частоты центра для удаления любого оставшегося следа допплеровского эффекта из исходного несущего информацию сигнала.
[0009] Процесс ТОА высокого разрешения содержит: получение пика корреляции путем взаимной корреляции третьего набора выборок, полученных из исходного несущего информацию сигнала с удаленным допплеровским эффектом, с четвертым набором выборок, полученных из локальной копии последовательности кода PN; использование второго временного центра пика для получения набора вторых оценочных символов; генерирование аппроксимации с помощью кривой с использованием набора вторых оценочных символов; и определение высокоточного ТОА путем деления значения точки пересечения частоты последовательной выборки, где значение точки пересечения получают с использованием аппроксимации с помощью кривой и выборок, связанных с приблизительным ТОА.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] Варианты осуществления изобретения описаны ниже со ссылками на прилагаемые чертежи, на которых одинаковые номера позиций представляют одинаковые элементы на всех чертежах и на которых изображено следующее.
[0011] Фиг. 1 представляет собой схематическое изображение иллюстративной системы, полезное для понимания настоящего изобретения.
[0012] Фиг. 2 представляет собой схематическое изображение иллюстративной архитектуры для SDR, представленной на фиг. 1.
[0013] Фиг. 3 представляет собой схематическое изображение, описывающее функциональные операции обработки сигналов, выполняемой SDR, представленной на фиг. 1-2.
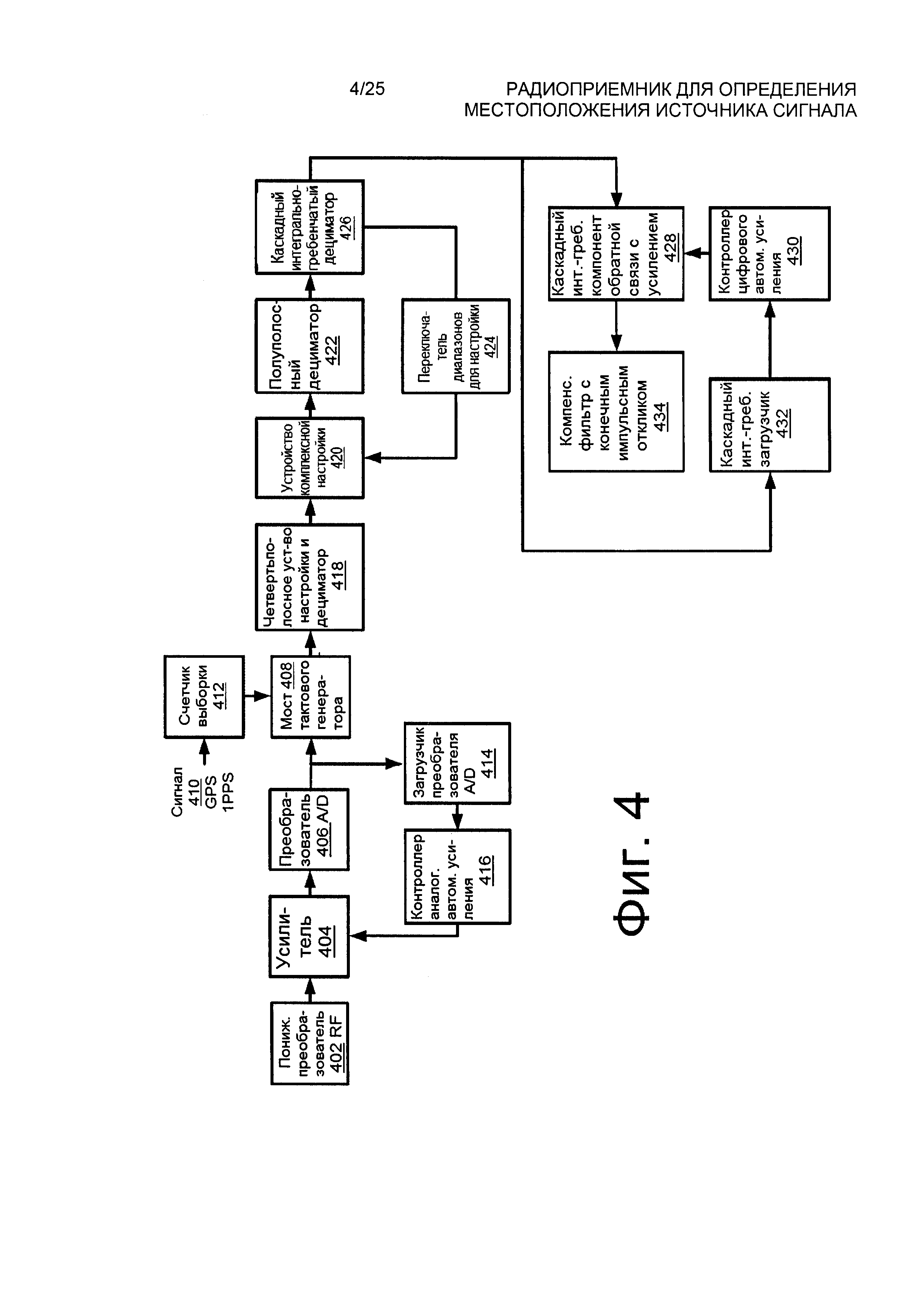
[0014] Фиг. 4 представляет собой подробную блок-схему, схематично иллюстрирующую операции сбора функционального блока, представленного на фиг. 3.
[0015] На фиг. 5 представлено множество графиков, полезных для понимания настоящего изобретения.
[0016] Фиг. 6 представляет собой подробную функциональную блок-схему, полезную для понимания операций обнаружения сигналов, применяемых в данном изобретении.
[0017] Фиг. 7 представляет собой подробную функциональную блок-схему, полезную для понимания обработки коррелятором, применяемой в данном изобретении.
[0018] На фиг. 8 представлено схематическое изображение, показывающее пики, уточненные с использованием FFT с более высоким разрешением.
[0019] Фиг. 9 представляет собой подробную функциональную блок-схему, полезную для понимания операции сжатия и демодуляции, применяемых в настоящем изобретении.
[0020] Фиг. 10 представляет собой схематическое изображение, иллюстрирующее взаимодействие устройства слежения с перестройкой и повторной выборкой.
[0021] Фиг. 11 представляет собой блок-схему иллюстративного способа определения времени прибытия (ТОА).
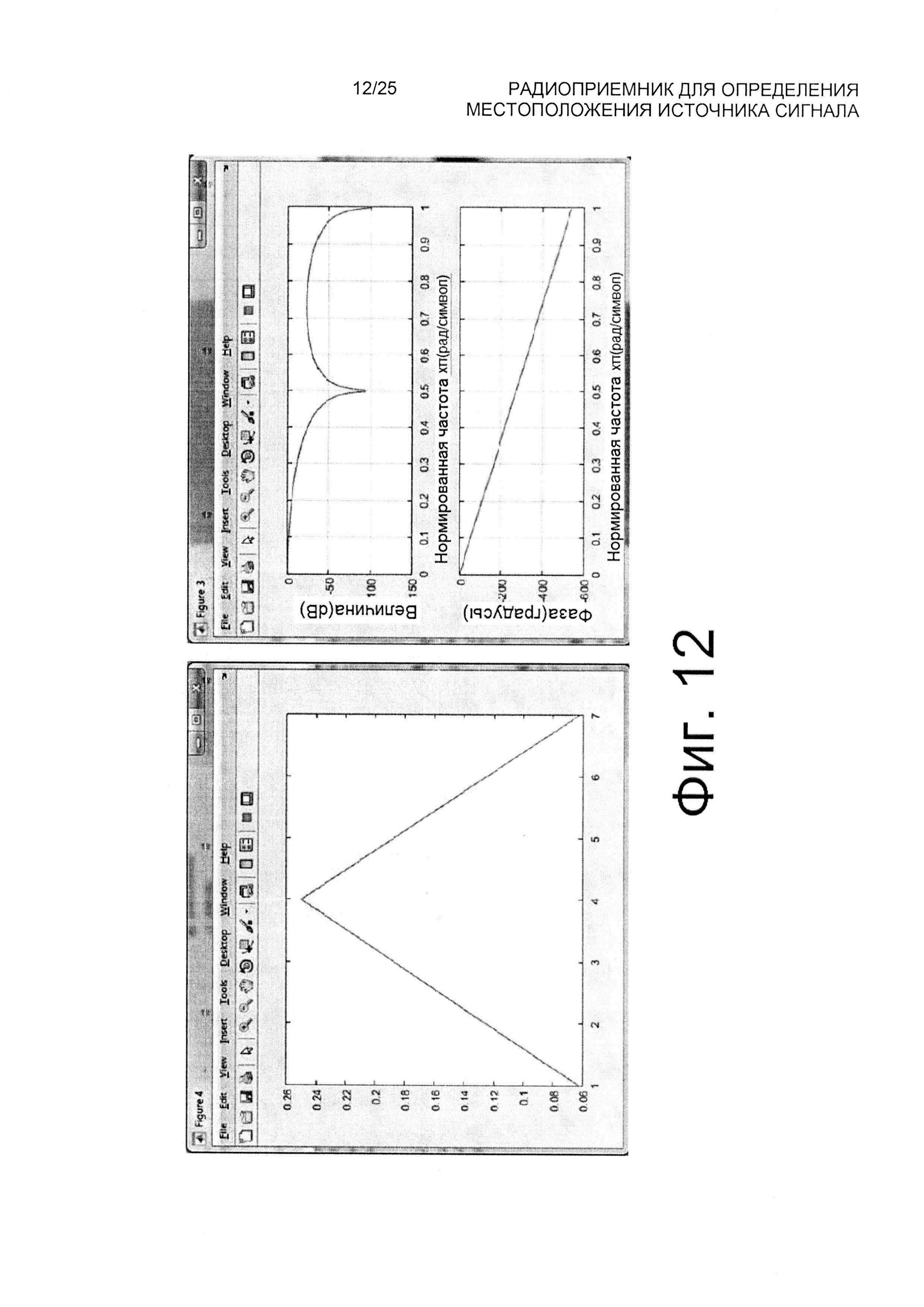
[0022] На фиг. 12 и 13 представлено множество графиков, полезных для понимания иллюстративных операций фильтрации, применяемых для определения ТОА.
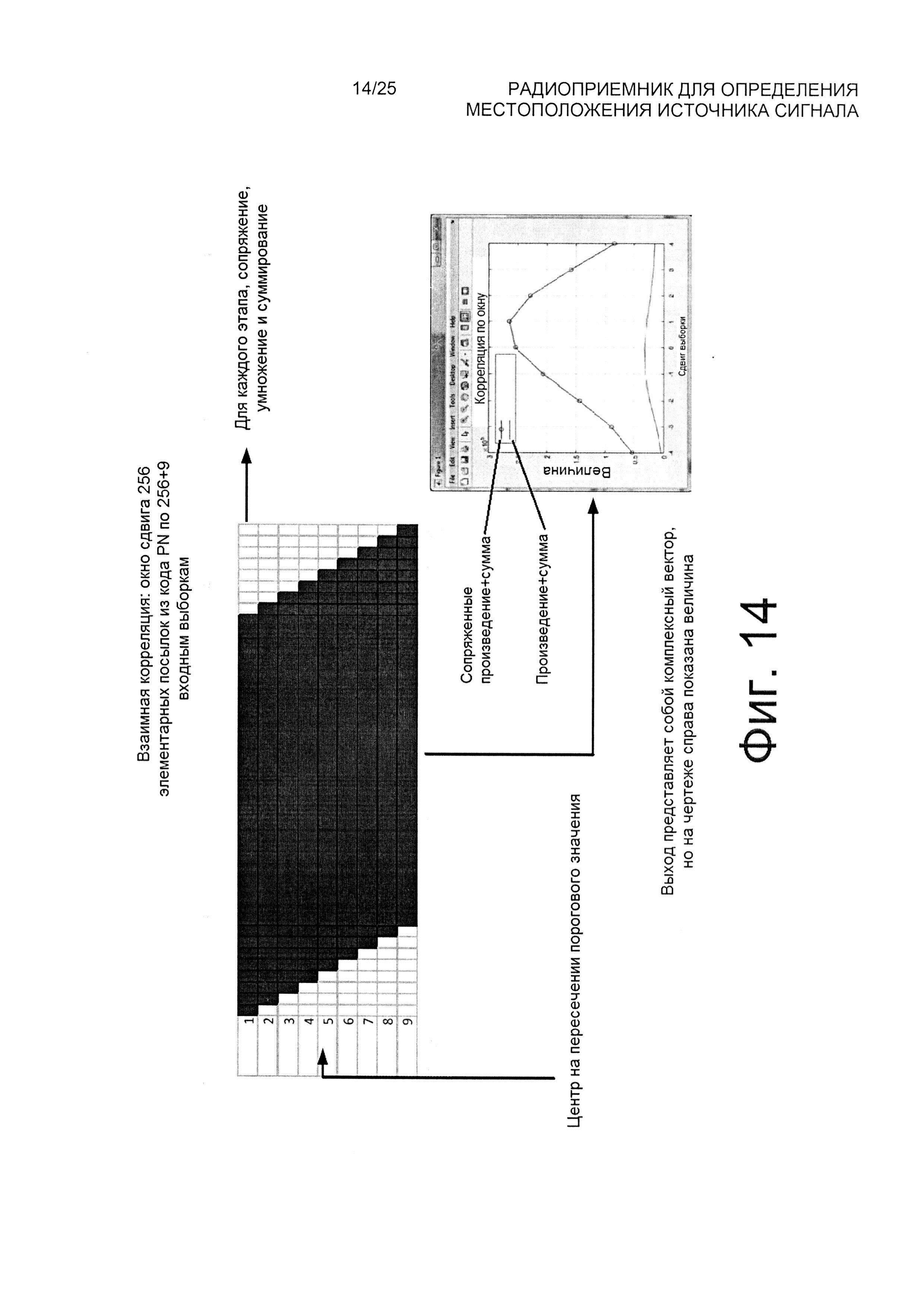
[0023] Фиг. 14 представляет собой схематическое изображение, полезное для понимания иллюстративных операций взаимной корреляции, используемых для определения ТОА.
[0024] Фиг. 15 представляет собой график, изображающий корреляцию одного символа по окну выборки.
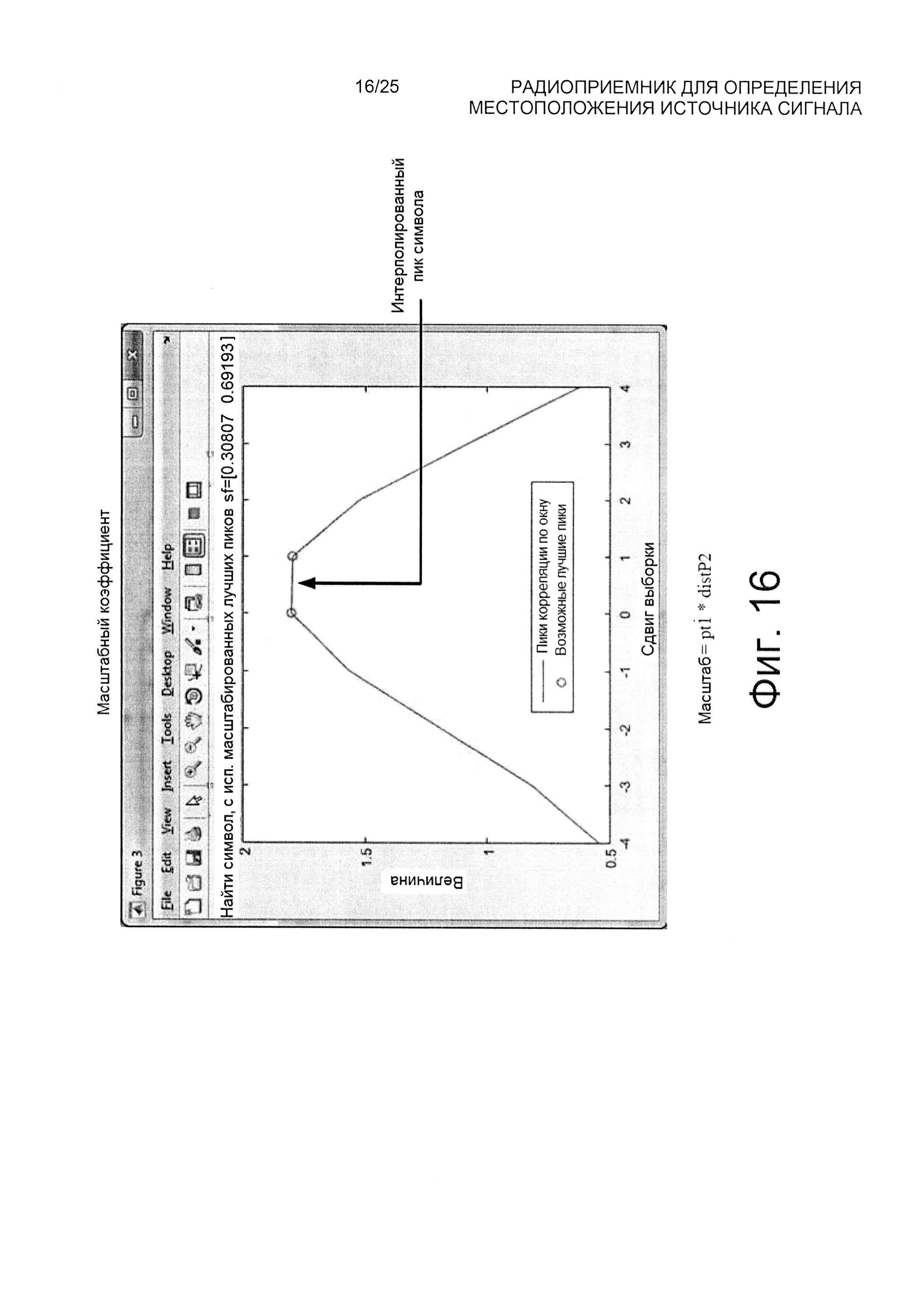
[0025] Фиг. 16 представляет собой график, полезный для понимания интерполированного пика символа.
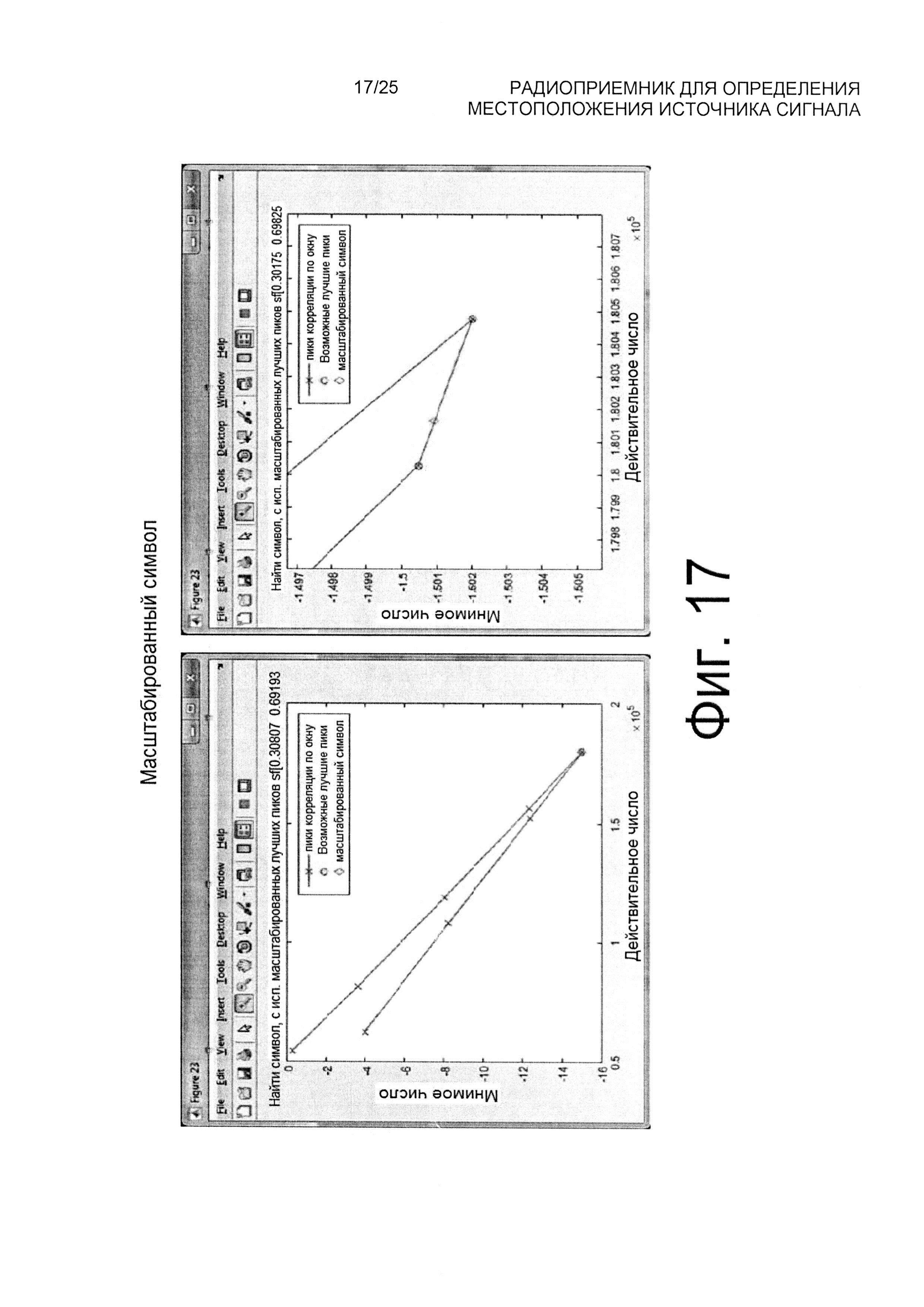
[0026] Фиг. 17 представляет собой графики, полезные для понимания того, как находится символ с использованием лучших пиков символа.
[0027] Фиг. 18 представляет собой схематическое изображение, полезное для понимания того, как определяется частота окна K символов.
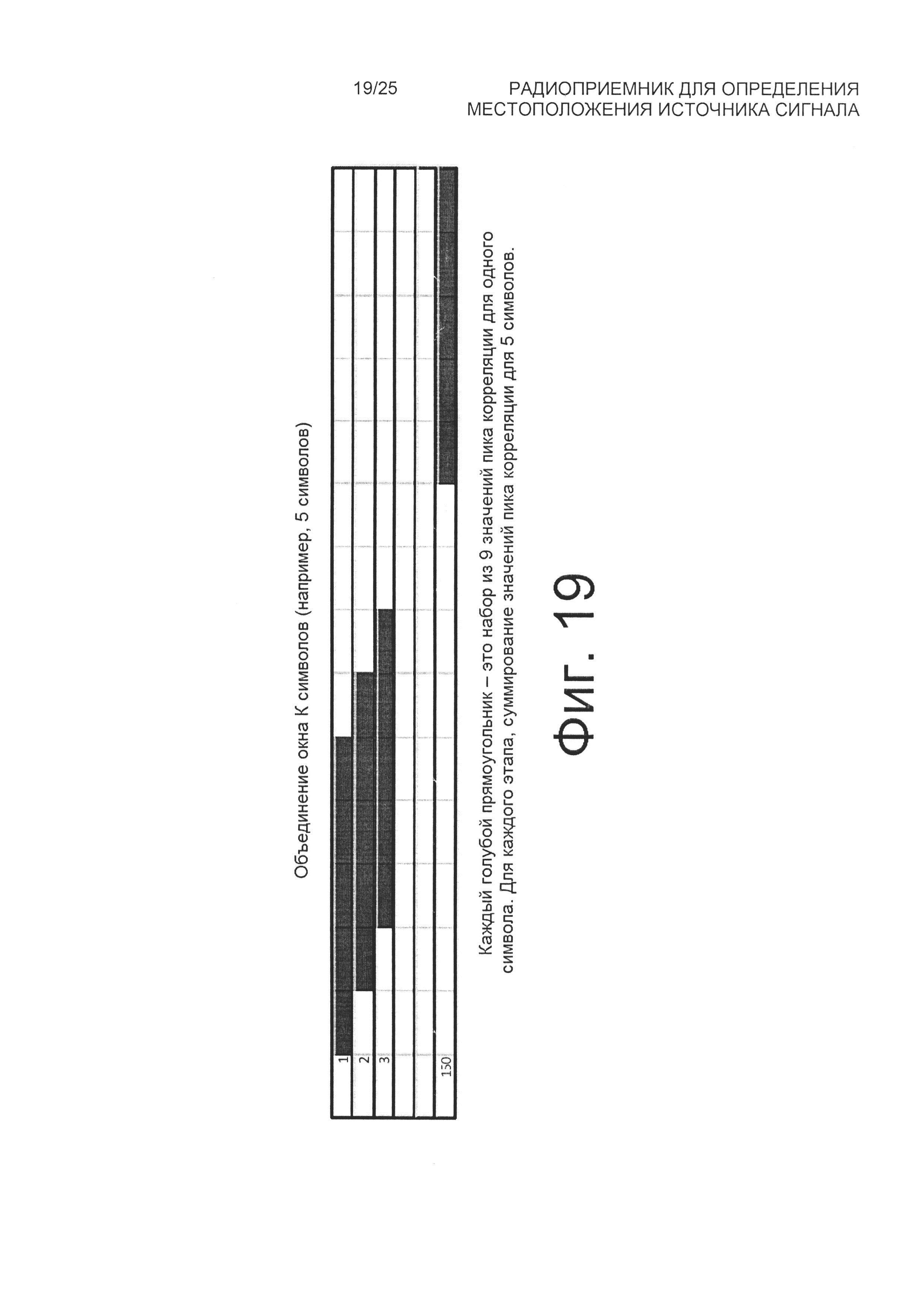
[0028] Фиг. 19 представляет собой схематическое изображение, полезное для понимания того, как объединяется набор K символов.
[0029] На фиг. 20 представлен график, показывающий объединенные значения пика по K символам.
[0030] Фиг. 21 представляет собой график, показывающий объединенные значения пика корреляции по К символам.
[0031] Фиг. 22 представляет собой график, показывающий аппроксимацию с помощью кривой смещений выборки пика символов.
[0032] Фиг. 23 представляет собой графики, полезные для понимания замедления времени и сокращения.
[0033] На фиг. 24 представлена блок-схема иллюстративного способа определения высокоточного ТОА.
[0034] На фиг. 25 представлена блок-схема иллюстративного способа для понимания процесса ТОА высокого разрешения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0035] Нетрудно понять, что компоненты вариантов осуществления изобретения, как они в целом описаны в данном документе и изображены на прилагаемых чертежах, могут быть скомпонованы и сконструированы в самых разнообразных различных конфигурациях. Таким образом, нижеследующее более подробное описание различных вариантов осуществления изобретения, представленных на чертежах, не предназначено для ограничения объема настоящего изобретения, а просто представляет собой различные варианты осуществления изобретения. Несмотря на то, что на чертежах представлены различные аспекты вариантов осуществления изобретения, чертежи необязательно выполнены с соблюдением масштаба, если только это не указано специально.
[0036] Настоящее изобретение может быть реализовано в других конкретных формах без отхода от его сущности или существенных характеристик. Описанные варианты осуществления должны рассматриваться во всех отношениях только как иллюстративные, а не ограничительные. Таким образом, объем изобретения указан в прилагаемой формуле изобретения, а не в этом подробном описании. Предполагается, что все изменения, находящиеся в пределах смыслового содержания и рамках эквивалентности формулы изобретения, охвачены ее объемом.
[0037] Во всем этом документе упоминание признаков, преимуществ или сходных формулировок не означает, что все эти признаки и преимущества, которые могут быть реализованы с помощью настоящего изобретения, должны относиться или относятся к любому единственному варианту осуществления изобретения. Скорее следует понимать, что формулировки, относящиеся к признакам и преимуществам, означают, что конкретный признак, преимущество или характеристика, описанные в связи с вариантом осуществления, включены по меньшей мере в один вариант осуществления настоящего изобретения. Таким образом, обсуждение признаков, преимуществ и сходных формулировок во всем документе может, но необязательно, относиться к одному и тому же варианту осуществления.
[0038] Кроме того, описанные признаки, преимущества и характеристики изобретения могут быть объединены любым подходящим способом в одном или нескольких вариантах осуществления. В свете приведенного описания специалисту в данной области техники может быть понятно, что изобретение может быть осуществлено на практике без одного или нескольких конкретных признаков или преимуществ конкретного варианта осуществления. В других случаях в некоторых вариантах осуществления могут быть отражены дополнительные признаки и преимущества, возможно отсутствующие во всех вариантах осуществления изобретения.
[0039] Во всем этом документе ссылки на "один вариант осуществления", "вариант осуществления" или сходные формулировки означают, что конкретный признак, конструкция или характеристика, описанные в связи с указанным вариантом осуществления, включены, по меньшей мере, в один вариант осуществления настоящего изобретения. Таким образом, все выражения "в одном варианте осуществления", "в варианте осуществления" и сходные формулировки в этом документе могут, но необязательно, относиться к одному и тому же варианту осуществления.
[0040] Единственное число при использовании в этом документе включает в себя формы множественного числа, если из контекста явно не следует иное. Если не указано иное, все технические и научные термины, используемые в данном документе, имеют те же значения, что обычно понимаются специалистом в данной области техники. При использовании в этом документе, термин "содержащий" означает "включающий в себя, но не ограниченный".
[0041] Настоящее решение реализует способы вычисления ТОА и FOA сигнала, передаваемого от маяка, транслируемого со спутника и принимаемого на наземной станции. Термины "время прибытия" и "ТОА", используемые в данном документе, относятся к времени прохождения сигнала, отправленного от первого устройства связи (например, маяка) и принимаемого на втором устройстве связи (например, наземной станции). Термины "частота прибытия" и "FOA", используемые в данном документе, относятся к частоте, на которой сигнал принимается удаленной наземной станцией. Точность ТОА прямо пропорциональна точности оценки местоположения маяка. Таким образом, настоящее решение обеспечивает новый способ вычисления высокоточного ТОА с целью улучшения оценки местоположения маяка.
[0042] В некоторых сценариях в приемнике SDR применяется новый способ. Приемник SDR конфигурирован для выполнения обнаружения сигнала (например, блок 304 на фиг. 3), демодуляции сигнала (например, рабочий блок 306 на фиг. 3) и получения высокоточных измерений ТОА в динамической допплеровской среде (например, рабочий блок 308 на фиг. 3). Детали каждой из этих операций подробно описаны ниже. Примечательно, что благодаря комбинации обработки сигналов и доступа к атмосферным данным и спутниковым эфемеридам, в настоящем решении возможна точность измерения, составляющая сто (100) нс. Точность представляет собой трехкратное (3) улучшение по порядку величины по сравнению с существующими поисково-спасательными приемниками.
[0043] Обнаружение сигнала выполняется с использованием процесса корреляции быстрого преобразования Фурье (FFT), позволяющего обнаруживать сигналы в диапазоне допплеровских частот. В течение процесса обнаружения сигнала вычисляется приблизительное ТОА.
[0044] Демодуляция сигнала достигается путем: (1) обнаружения отклонения фазы из обнаруженного несущего сигнала (модулированного с помощью последовательности кода псевдошума (PN)) вследствие движения спутника; (2) удаления отклонения фазы из обнаруженного несущего сигнала; (3) выполнения раннего/позднего стробирующего слежения для восстановления фазы тактовой синхронизации символов обнаруженного несущего сигнала с использованием алгоритма раннего/позднего стробирования; и (4) выполнения демодуляции обнаруженного несущего сигнала с использованием его восстановленной тактовой синхронизации символов для извлечения из него исходного несущего информацию сигнала. Алгоритмы раннего/позднего стробирования хорошо известны в данной области техники и поэтому не описаны в данном документе. В данном изобретении может быть использован без ограничений любой известный или известный в будущем алгоритм раннего/позднего стробирования. Основная цель раннего/позднего стробирующего слежения заключается в том, чтобы облегчить тактовую синхронизацию символов так, чтобы можно было выполнить выборку импульса на его значении пика, как описано ниже. Существует несколько способов демодуляции, которые могут быть применены в данном изобретении в зависимости от того, как передаются параметры сигнала основной полосы (такие, как амплитуда, частота или фаза) внесущем сигнале. В данном изобретении может быть применен любой известный или известный в будущем способ демодуляции, подходящий для демодуляции заданной модулированной несущей волны.
[0045] Высокоточное ТОА получается путем: (1) вычисления смещений задержки времени с использованием корреляций окон кода PN для каждого символа исходного несущего информацию сигнала; (2) аппроксимации, с помощью кривой, смещений задержки времени для построения аппроксимирующей кривой (или математической функции), имеющей наилучшую аппроксимацию для серии точек данных, которые определяют смещения задержки времени; (3) экстраполяции неизвестных смещений задержки времени с использованием аппроксимирующей кривой; и (4) определения высокоточного ТОА обнаруженного модулированного несущего сигнала с использованием смещений задержки времени и/или неизвестных смещений задержки времени, экстраполированных с использованием аппроксимирующей кривой. Термины "окно кода псевдошума" и "окно кода PN", используемые в данном документе, относятся к последовательности из n бит, содержащихся в коде псевдошума, где n является целым числом. Два окна кода PN могут содержать по меньшей мере один и тот же бит (т.е. содержать перекрывающиеся части кода PN) или ни один из тех же самых битов (т.е. содержать неперекрывающиеся части кода PN). Аппроксимация с помощью кривой может включать в себя, но без ограничения, интерполяцию и/или сглаживание. Кривая обеспечивает возможность получать значения функции там, где данные не доступны. Экстраполяция включает в себя использование аппроксимирующей кривой за пределами диапазона наблюдаемых данных для оценки значения переменной (например, неизвестного значения смещения задержки времени для первого символа) на основе ее связи с другой переменной (например, известное смещение задержки времени по меньшей мере второго символа).
[0046] Дополнительное уточнение высокоточного ТОА достигается путем: (1) определения положения спутника; (2) вычисления атмосферной и релятивистской задержки, повлиявшей на обнаруженный модулированный несущий сигнал в течение его передачи с использованием положения спутника; и (3) применения атмосферной и релятивистской задержек к высокоточному ТОА.
[0047] На фиг. 1 представлено схематическое изображение иллюстративной системы 100, полезное для понимания настоящего изобретения. Система 100 содержит маяк 102, спутник 104, систему 150 расширения спектра методом прямой последовательности (DSSS) и устройство 160 обработки местоположения GEO. Маяк 102 может включать в себя, но без ограничения, мобильное устройство связи, устройство связи, установленное на судне, и/или устройство связи, установленное на самолете. Во всех сценариях маяк 102 конфигурирован для передачи сигнала тревоги, означающего состояние бедствия.
[0048] Когда сигнал тревоги передается от маяка 102 в виде сигнала DSSS, он принимается на спутнике 104 по восходящему каналу 130 радиочастоты (RF). Спутник 104 повторно передает немодифицированный сигнал тревоги (прямая ретрансляция) с использованием нисходящего канала 132 RF. Сигналы DSSS хорошо известны в данной области техники и поэтому подробно не описаны в данном документе. Тем не менее, следует понимать, что в некоторых сценариях сигнал DSSS формируется путем умножения кода псевдошума (PN) высокой частотой на сигнал данных с более низкой частотой. Коды PN хорошо известны в данной области техники и поэтому в данном документе не описаны. В данном изобретении может быть использован без ограничений любой известный или известный в будущем код PN. Процесс умножения приводит к распределению энергии сигнала данных по более широкой полосе частот, чем требуется сигналу с низкой частотой. Цель этого распределения - обеспечить возможность сосуществования нового сигнала с другими сигналами с минимальными помехами между ними.
[0049] Затем сигнал DSSS принимается системой 150 DSSS. Система 150 DSSS обрабатывает принятый сигнал DSSS для определения, таким образом, ТОА и/или FOA. Новый способ определения ТОА и/или FOA будет более очевидным ниже из описания. ТОА и/или FOA затем сохраняются для последующего использования устройством 160 обработки местоположения GEO для определения точного местоположения маяка 102 относительно системы 150 DSSS.
[0050] Как представлено на фиг. 1, система 150 DSSS содержит множество подсистем 114, 116, 118, 120 DSSS. Настоящее изобретение не ограничено в этом отношении. Система 150 DSSS может включать в себя любое количество подсистем DSSS, требуемое для конкретного применения. Например, система 150 DSSS может включать в себя одну подсистему DSSS или N подсистем DSSS, где N - целое число. Однако точность местоположения маяка 102 увеличивается с увеличением количества резервных подсистем DSSS.
[0051] Во всех случаях компоненты 122 и 124 синхронизации обеспечивают точную временную разверстку для подсистемы (подсистем) DSSS. Например, компоненты синхронизации содержат приемник 124 GPS и тактовый генератор 122. Приемник 124 GPS обеспечивает сигнал с одним (1) импульсом в секунду, имеющим точность до пятидесяти (50) нс всемирного координированного времени (UTC), и опорный сигнал с частотой десять (10) МГц, имеющий очень низкий фазовый шум и стабильный по частоте до одной сотой части на миллиард (1 е-11 или 0,01 части на миллиард). Кроме того, тактовый генератор 122 (например, сетевой сервер времени) обеспечивает временной тег, являющийся точным до десяти (10) мс. Комбинация этих двух элементов 122 и 124 обеспечивает временную привязку с точностью пятьдесят (50) нc для подсистемы (подсистем) DSSS. Настоящее изобретение не ограничивается деталями этого примера. Тем не менее, следует понимать, что в данном изобретении может быть использована без ограничений любая схема временной привязки, известная или известная в будущем, при условии, что временная привязка равна или меньше пятидесяти (50) нс от фактического времени UTC и обеспечивается когерентно с подсистемами 114-120 DSSS.
[0052] Каждая из подсистем DSSS содержит спутниковую антенну 106, понижающий преобразователь 108 RF и SDR 110. Понижающие преобразователи RF хорошо известны в данной области техники и поэтому не описаны в данном документе. В данном изобретении может быть использован любой известный или известный в будущем понижающий преобразователь RF, конфигурированный, по меньшей мере, для приема сигналов либо в S-диапазоне, либо в L-диапазоне. В некоторых сценариях понижающий преобразователь 108 RF фильтрует, усиливает и преобразует с понижением принятый сигнал DSSS в сигнал промежуточной частоты (IF) (например, сигнал IF с частотой 70 МГц). Сигнал IF затем подается в SDR 110 для цифровой обработки. Понижающий преобразователь 108 RF и SDR 110 управляются временной привязкой приемника 124 GPS для сохранения когерентности.
[0053] На фиг. 2 представлено схематическое изображение иллюстративной архитектуры для SDR 110. Как представлено на фиг. 2, SDR 110 содержит антенну 202, соединенную с, антенно-фидерной системой 204 для маршрутизации принятых сигналов в приемник 206. Приемник 206 может включать в себя любой из большого разнообразия систем широкополосного приемника, широко известных в области техники, связанной с SDR. В этом отношении приемник 206 может включать в себя, но без ограничения, один или более каскадов усилителей и фильтров RF. В зависимости от конструкции системы SDR, приемник 206 может также включать в себя один или более смесительных каскадов, усилителей IF и каскадов фильтров IF. Один или более выходных каналов RF или IF обеспечивают связь от приемника 206 к одному или более аналого-цифровым (A/D) преобразователям 208. После преобразования входящего аналогового сигнала в цифровой сигнал с помощью преобразователя (преобразователей) 208 A/D, он проходит в цифровую секцию 250 SDR 110 для любой необходимой обработки цифрового сигнала приемника.
[0054] Обработка цифрового сигнала приемника выполняется в блоке 210 цифровой обработки приемника цифровой секции 250. Блок 210 цифровой обработки приемника состоит из программируемого микропроцессора, компьютера общего назначения, программированного с помощью набора инструкций, или любых других электронных схем, подходящих для выполнения функций, описанных в данном документе. В некоторых сценариях блок 210 цифровой обработки приемника содержит микропроцессор, программированный с помощью подходящего набора инструкций для выполнения различных функций, описанных в данном документе.
[0055] Обработка цифрового сигнала приемника содержит: сдвиг частоты сигнала FR к сигналу основной полосы (например, сдвиг частоты сигнала от 70 МГц до 0 Гц); и фильтрацию сигнала основной полосы для удаления дублирующих произведений. Фильтрация может быть достигнута с использованием фильтра с конечным импульсным откликом (FIR) Фильтры FIR хорошо известны в данной области техники и поэтому не описаны в данном документе.
[0056] В то же время сигнал IF преобразуется с понижением. Полученные выборки имеют штамп с временным тегом Epoch. Выборка, происходящая в тот же момент времени, что и текущая секунда (как определено сигналом временной привязки, например сигналом GPS 1 PPS), прикрепляется к временному тегу (например, количество секунд от заданной даты, например, 1 января, 2012). Каждая последующая выборка затем смещается на обратную частоту выборки.
[0057] После получения сигнала в основной полосе в течение сбора 302 сигнала, с помощью SDK 110 выполняются различные другие операции обработки сигнала. Как представлено на фиг. 3, эти операции включают в себя: выполнение обнаружения 304 сигнала; выполнение демодуляции 306 сигнала; выполнение процесса 308 определения TOA/FOA; и выполнение обработки 310 местоположения. Каждая из этих операций 304-310 подробно рассмотрена ниже.
[0058] Процесс 304 обнаружения сигнала выполняется блоком 210 цифровой обработки приемника с использованием процесса корреляции FFT. Процесс корреляции FFT обеспечивает возможность обнаружения в диапазоне допплеровских частот. Процесс корреляции FFT включает в себя: (а) вычисление приблизительного ТОА; (b) выполнение корреляции последовательной выборки сигнала основной полосы с помощью реплики последовательности кода PN, используемой для модуляции несущего сигнала; и (с) выполнение FFT с использованием результатов корреляции последовательной выборки. На этапе (а) приблизительное ТОА вычисляется путем анализа информации о времени, содержащейся в сигнале основной полосы, для определения времени прохождения для исходного несущего информацию сигнала, передаваемого от маяка (например, маяк 102 на фиг. 1) на наземную станцию (например, система 150 DSSS на фиг. 1). На этапе (b) распределенная энергия стягивается в узкий пик, когда реплика и принятый несущий сигнал перекрываются во времени. Поскольку спутник (например, спутник 104 на фиг. 1) движется (т.е. он не является геостационарным) и вызывает допплеровские сдвиги в несущем сигнале, несущий сигнал не может быть сдвинут точно к основной полосе без знания положения 102 маяка. По этой причине FFT применяется после корреляции последовательной выборки, что приводит к выявлению пика на фактической результирующей частоте доплеровского смещения.
[0059] При выполнении успешной корреляции последовательной выборки должен быть обнаружен пик импульса для каждого символа сигнала с расширенным спектром. Пик обнаруживается с помощью экспоненциального усреднения данных FFT. Каждый раз, когда выполняется FFT, новые данные FFT экспоненциально усредняются и сглаживаются с помощью данных предыдущего FFT. Это является показателем средней внешней энергии в полосе. Может быть получено пороговое значение путем умножения постоянного значения на значение средней внешней энергии. Затем это пороговое значение может быть использовано для обнаружения пика. Обнаруженный пик определяется количественно как: (i) смещение выборки (т.е. количество выборок от самой последней секунды); (ii) смещение частоты в текущем FFT; и (iii) величина пика. Эти значения (i) - (iii) затем сохраняются в запоминающем устройстве 228 для последующего использования.
[0060] Обнаруженный пик и выборки основной полосы с временной меткой затем используются в последующем процессе 306 демодуляции сигнала с помощью SDR 110. Процесс 306 демодуляции сигнала включает в себя обнаружение и удаление остаточного смещения частоты и остаточной отклонения фазы из сигнала. Остаточная частота и смещения фазы обнаруживаются путем первого сжатия сигнала. Сжатие достигается путем: поиска подходящей выборки основной полосы с учетом временной метки и смещения выборки; понижающего преобразования сигнала с расширенным спектром до 0 Гц с использованием смещения частоты для удаления доплеровского сдвига; сжатия сигнала с расширенным спектром с использованием фрагментов реплики с небольшим размером символа кода PN сигнала основной полосы; и объединения супердискретизированных сжатых выборок для формирования символа. После завершения процесса сжатия, символ подергается быстрому преобразованию Фурье FFT для определения остаточного смещения частоты. Остаточное смещение частоты удаляется из сигнала путем сдвига сигнала по частоте к основной полосе. Дополнительно обнаруживается и удаляется остаточная отклонение фазы (вследствие движения спутника в течение пачки импульсов). После этого описанный выше процесс повторяется для следующей выборки основной полосы с временной меткой. После завершения описанного выше итерационного процесса символы отображаются в биты с использованием таблицы поиска.
[0061] Как указано выше, процесс 306 демодуляции сигнала также включает в себя выполнение раннего/позднего стробирующего слежения и демодуляции. Раннее/позднее стробирующее слежение включает в себя вычисление смещений задержки времени для каждого символа. Смещения задержки времени вычисляется с использованием ранних/поздних стробирующих корреляций окон кода PN для каждого символа. В частности результаты ранних/поздних стробирующих корреляций аппроксимируются с помощью кривой и экстраполируются. Результат экстраполяции используется для вычисления высокоточного ТОА (уточненной версии ранее определенного приблизительного ТОА) в течение процесса 308 вычисления TOA/FOA.
[0062] В течение процесса 306 демодуляции сигнала каждый подфрагмент кода PN коррелируется с окном выборок в сигнале с расширенным спектром. Это формирует раннее/позднее стробирующее обнаружение каждого символа и идентифицирует соответствующий момент времени выборки для конкретного символа путем максимизации энергии. Энергия максимизируется путем выбора сдвига корреляции максимальной энергии. Сдвиг корреляции максимальной энергии регистрируется для каждого символа, так что регистрируется набор относительных временных тегов по пачке импульсов сигнала. Затем набор временных тегов может быть аппроксимирован с помощью кривой (линейной или более высокого порядка в зависимости от динамики спутников или передатчика) с использованием метода средней квадратичной ошибки. ТОА пачки импульсов представляет собой точку пересечения функции.
[0063] После вычисления битов сообщения и ТОА, выполняется дополнительное уточнение ТОА в течение процесса 308 вычисления TOA/FOA. Уточнение достигается путем: определения положения спутника; вычисления атмосферной и релятивистской задержки, повлиявшей на обнаруженный модулированный несущий сигнал в течение его передачи; и применения атмосферной и релятивистской задержки к высокоточному ТОА. Это может быть выполнено с использованием свободно доступного программного пакета, называемого GPSTookit®. GPSTookit® содержит программные алгоритмы, вычисляющие положение спутника, релятивистский эффект и задержку ионосферы при вводе эфемерид спутника, времени суток и местоположения приемника.
[0064] При вычислении задержки сигнала на линии Земля-спутник необходимо учитывать погрешность групповой задержки спутника, чтобы предсказать время прибытия на спутник и, в свою очередь, высокоточное время передачи. Это осуществляется путем выполнения процесса калибровки с использованием известного положения передачи, положения приема и эфемерид спутников. Процесс калибровки выполняется для вычисления задержек и статистического определения неизвестной задержки спутника. Время полета от маяка (например, маяк 102 на фиг. 1) в подсистему DSSS (например, подсистема 114 DSSS на фиг. 1) вычисляется путем вычисления положения спутника с использованием эфемерид SP3. Задержки ионосферы и тропосферы вычисляются после определения точки вхождения в атмосферу пути сигнала. Разница между измеренным временем и предсказанным временем дает погрешность групповой задержки спутника. Большая выборка погрешности групповой задержки выполняется, когда спутник находится на высоте выше сорока (40) градусов и предпочтительно, когда задержки ионосферы минимальны. Это достигается путем взятия выборок, когда положение Солнца находится над горизонтом области передатчика и приемника. Благодаря комбинации обработки сигналов и доступа к атмосферным данным и спутниковым эфемеридам, обеспечивается возможность точности измерения, составляющей по меньшей мере сто (100) нс. Эта точность обеспечивает трехкратное (3) улучшение по порядку величины по сравнению с существующими поисково-спасательными приемниками.
[0065] На фиг. 2 также представлено, что SDR 110 дополнительно содержит источник 220 питания для обеспечения питания различных цифровых и аналоговых блоков, составляющих систему. SDR 110 может также содержать управляющий процессор 222. Сходно с блоком 210 цифровой обработки приемника, управляющий процессор 222 может состоять из программируемого микропроцессора, компьютера общего назначения, программированного с помощью набора инструкций, или любых других электронных схем, подходящих для выполнения функций, описанных в данном документе. В некоторых сценариях управляющий процессор представляет собой микропроцессор, программированный с помощью подходящего набора инструкций для выполнения различных функций, описанных в данном документе.
[0066] Управляющий процессор 222 содержит порты передачи данных для передачи управляющих сигналов в одну или более компонентных систем, образующих SDR 110. Порты передачи могут быть соединены с обычной коммуникационной шиной 226 для данных компьютеров любого подходящего типа. Коммуникационная шина 226 для данных компьютеров может быть использована для передачи управляющих сигналов от управляющего процессора 222 в одну или более подсистем SDR, как описано ниже.
[0067] Управляющий процессор также функционально связан с пользовательским интерфейсом 224. Пользовательский интерфейс 224 может быть реализован с использованием дисплея (не представлен) для представления графического пользовательского интерфейса (GUI). Дисплей может быть жидкокристаллическим дисплеем (LCD) или любым другим дисплеем, подходящим для использования на мобильной станции. Дисплей может быть черно-белым или цветным. Пользовательский интерфейс 224 также предпочтительно содержит устройство ввода пользователя. Устройство ввода пользователя может включать в себя клавиатуру, сенсорную панель, кнопки, переключатели, датчики и/или любые другие устройства, которые могут быть использованы для получения вводов пользователя.
[0068] Архитектура SDR, представленная на фиг. 2 является иллюстративной. Настоящее изобретение не ограничивается представленной на фиг. 2 архитектурой. Например, в тех или иных сценариях SDR содержит рабочую станцию PC, на которой установлена плата FPGA/аналогового цифрового преобразователя (ADC). Плата FPGA/ADC оцифровывает и обрабатывает принятые сигналы IF. Плата FPGA/ADC может включать в себя, но без ограничения, плату цифрового приемника Pentek®, выполняющую следующие операции: оцифровка сигналов на частоте 200 МГц; присвоение временных меток данным с использованием 1 PPS; и выполняет обработку обнаружения. Цифровой приемник Pentek® установлен в слот PCI-e рабочей станции PC, обеспечивающий прозрачный интерфейс между регистрами в FPGA и рабочей станцией PC. Выборки основной полосы и обнаружения проходят в рабочую станцию PC через интерфейс PCI-e. Рабочая станция PC принимает обнаружения и выборки основной полосы, распределяет и демодулирует сигналы и представляет результаты процессору местоположения. Рабочая станция PC создает файл XML специального формата и копирует файл XML в соответствующий каталог в подключенном диске на сервере 112. Настоящее изобретение не ограничивается деталями этого примера.
[0069] Обработка сигнала
[0070] Как указано выше, на схематическом изображении описываются функциональные операции обработки сигналов, выполняемой SDR 110. Функциональные операции содержат: операции сбора, представленные функциональным блоком 302; операции обнаружения сигнала, представленные функциональным блоком 304; операции сжатия и демодуляции сигнала, представленные функциональным блоком 306; и операции оценки ТОА и/или FOA, представленные функциональным блоком 308. Оценки ТОА и/или FOA затем используются в операциях определения местоположения для определения местоположения маяка (например, маяк 102 на фиг. 1) относительно системы DSSS (например, система 150 DSSS на фиг. 1), как представлено функциональным блоком 310. Операции определения местоположения выполняются устройством обработки местоположения GEO (например, устройство 160 обработки местоположения GEO на фиг. 1).
[0071] Операции сбора функционального блока 302 в целом включают в себя: прием цифровых выборок от понижающего преобразователя RF (например, понижающий преобразователь 108 RF на фиг. 1); и обработку цифровых выборок для настройки, фильтрации и/или форматирования так, чтобы цифровые выборки были при соответствующей частоте для последующей обработки. Операции обнаружения сигнала функционального блока 304 в целом включают в себя: взятие выборок основной полосы; выполнение корреляционной функции для стягивания распределенной энергии в пик полосы с узким отношением сигнал-шум (SNR); сравнение пика SNR с пороговым значением некоррелированного сигнала; и создание пакетов обнаружения, состоящих из выборки счетчика прибытия и частоты индекса прибытия, когда пик превышает пороговое значение. Операции сжатия и демодуляции сигнала функционального блока 306 в целом включают в себя: прием пакетов обнаружения; выполнение кластерной обработки для идентификации субпиков из заданной пачки импульсов; уменьшение наборов пиков до дискретного набора обнаружений; и последовательную обработку набора обнаружений для сжатия и демодуляции сигнала. Кроме того, для каждого символа вычисляется информация о времени и частоте в течение операций сжатия и демодуляции сигнала функционального блока 306. Функция 308 TOA/FOA может аппроксимировать, с помощью кривой, оценки ТОА и FOA для определения уточненной оценки.
[0072] Сбор
[0073] На фиг. 4 представлена более подробная блок-схема, схематично иллюстрирующая операции сбора функционального блока 302. Операции сбора в целом включают в себя преобразование сигнала RF S-диапазона в цифровые выборки основной полосы. Усилителю 404 предшествует понижающий преобразователь 402 RF. На понижающем преобразователе 402 RF, по меньшей мере часть (например, 20 МГц) сигнала RF S-диапазона предварительно выбирается и преобразуется с понижением в сигнал IF (например, сигнал IF с частотой 70 МГц). В усилителе 404 выполняется усиление (например, усиление 30 дБ) для повышения мощности сигнала ближе к диапазону входного уровня преобразователя 406 A/D. Дополнительный коэффициент усиления доступен перед преобразователем 406 A/D.
[0074] Может быть выбрана частота выборки преобразователя 406 A/D (например, 100 МГц), чтобы обеспечить возможность прямой оцифровки фильтрованного сигнала с полосой пропускания IF (например, фильтрованная полоса 406 МГц с полосой пропускания IF 70 МГц). Тактовый генератор (например, с частотой 100 МГц) и приемник S-диапазона синхронизируются по фазе с временной привязкой GPS (например, опорный сигнал 10 МГц). Ширина полосы преобразователя блока RF выбирается так, чтобы иметь такое значение (например, 20 МГц), что IF имеет недостаточную выборку. Вход для преобразователя 406 A/D регулируется таким образом, что суммарная агрегированная мощность пика в преобразователе 406 A/D составляет не более 0 дБм. Выборки могут проходить через мост 408 тактового генератора.
[0075] Выходной спектр IF приемника S-диапазона обращается, как представлено на графике (а) на фиг. 5. Когда происходит недостаточная выборка на частоте 100 МГц, преобразователь 406 A/D видит необращенный спектр, представленный на графике (b) на фиг. 5. После каскадов фильтрации, понижающего преобразования и децимации выходной спектр ограничен полосой частот менее 50 кГц, при этом частота выборки составляет 100 кГц, как представлено на графике (с) фиг. 5.
[0076] Мост 408 тактового генератора отделяет частоту выборки от скорости обработки. Это обеспечивает возможность работы на полной мощности на частоте 308 МГц при обработке сигналов программно-аппаратного обеспечения. Сигнал 410 GPS 1 PPS используется для сброса счетчика 412 выборки, отмечающего выборки в секунду.
[0077] Загрузчик 414 преобразователя A/D обеспечивает индикацию входной энергии для преобразователя 406 A/D. Если преобразователь 406 A/D перегружен, может быть выполнена регулировка аналогового усиления, чтобы компенсировать, таким образом, контроллер 416 аналогового автоматического усиления.
[0078] После прохождения выборок через мост 408 тактового генератора, сигнал может быть группирован в основную полосу и отфильтрован по ширине полосы канала DSSS ретранслятора. Он может включать в себя полосу пропускания сигнала, а также защитную полосу для доплеровского сдвига и стабильности генератора маяка. Как представлено функциональными блоками 418-434, фильтрация и уменьшение частоты выборки могут быть выполнены с помощью четвертьполосного фильтра, устройства комплексной настройки, полуполосного дециматора, каскадного интегрально-гребенчатого (CIC) дециматора и децимирующего компенсационного фильтра конечной импульсной характеристики (FIR). CIC-компонент 428 обратной связи с усилением обеспечивает возможность максимизации динамического диапазона выхода с помощью усиления обратной связи. Множество каскадов фильтрации обеспечивают эффективный способ группирования сигнала в основную полосу.
[0079] В некоторых сценариях компоненты 402-406 и 410 реализованы в аппаратных средствах. Компоненты 408, 412, 414, 418-434 и 432 реализованы в программно-аппаратном обеспечении. Компоненты 416, 424 и 430 реализованы в программном обеспечении. Настоящее решение не ограничено в этом отношении. Все или некоторые из перечисленных компонентов могут быть реализованы в виде аппаратных средств, программного обеспечения или их комбинации.
[0080] Обнаружение сигнала
[0081] На фиг. 6 представлена более подробная блок-схема, полезная для понимания операций обнаружения сигналов, применяемых в данном изобретении. Как правило, обнаружение сигнала разбивается на следующие два этапа: (1) идентификация распределенных сигналов в шуме посредством обнаружения пика стянутой распределенной энергии; и (2) оценка и уточнение обнаружений пиков для уменьшения ложных тревог и увеличения вероятности успешного приема. Идентификация сигналов в шуме выполняется в элементе 604 обработки коррелятора в программно-аппаратном обеспечении. В некоторых сценариях элемент 604 обработки коррелятора состоит из коррелятора на основе FFT, работающего с начальной частью сигнала. Элемент 604 обработки коррелятора сжимает сигнал. FFT когерентно интегрирует и представляет несущую частоту базового сигнала, подвергнутую доплеровскому эффекту.
[0082] Оценка и уточнение пиков выполняется с помощью программного обеспечения. Когда имеется пачка импульсов, в зависимости от мощности принятого сигнала может иметься набор обнаружений. Если имеется несколько пачек импульсов, то могут иметься многочисленные наборы обнаружений. Искатель 606 пика уменьшает помехи при обнаружениях до набора дискретных пиков. Эти пики используются в сочетании с идентифицированными сложными распределенными выборками для дополнительного уточнения пика в разрешении по частоте и времени.
[0083] Всемирное координированное время (UTC) проходит от программного обеспечения в пакетизатор выборок и средство 608 присвоения временных меток для соответствия с сигналом 1 PPS. Тактовый генератор SDR синхронизируется с локальным сервером времени, что гарантирует миллисекундную точность по отношению к UTC. После прохождения времени UTC в программно-аппаратное обеспечение, назначение временных меток может иметь точность до десяти (10) наносекунд.
[0084] В некоторых сценариях компоненты 602, 604 и 608 реализованы в программно-аппаратном обеспечении. Компоненты 606-612 реализованы в программном обеспечении. Настоящее решение не ограничено в этом отношении. Каждый из компонентов 602-612 может быть реализован в аппаратных средствах, программном обеспечении или их комбинации.
[0085] Коррелятор
[0086] На фиг. 7 представлена более подробная блок-схема, полезная для понимания элемента 604 обработки коррелятора, применяемого в данном изобретении. Элемент 604 обработки коррелятора принимает супердискретизированные комплексные выборки от функции 702 сбора данных. Супердискретизированные комплексные выборки проходят в каждую из двух (2) ветвей процесса 704-712 и 714-722, которые могут вычислять коррелированные случайные величины сигнал плюс шум и некоррелированные случайные величины сигнал плюс шум. Распределенный сигнал может быть супердискретизирован с коэффициентом четыре (4). На каждой ветке каждая новая выборка проходит в один (1) из четырех (4) блоков коррелятора, сжимающих фреймы из 4096 чипов (элементарных посылок) и когерентно объединяющих блоки из 4 выборок. Модулированный код расширения PN для конкретного маяка сохраняется в энергозависимом запоминающем устройстве (например, оперативная память (RAM)) 726. Модулированный код расширения PN может быть обновлен до других требуемых кодов PN и модуляций расширения. Другой некоррелированный код PN сохраняется в энергозависимом запоминающем устройстве 724 для вычисления некоррелированного выхода. Результирующий поток 4096 значений проходит через FFT 724 или 716 с 4096 точками, выход которого представляет собой обнаруженную величину, как представлено функциональным блоком 708 или 718. Некоррелированный сигнал экспоненциально усредняется. Это будет оценка шума, по отношению к которой сравнивается обнаружение сигнала. Когда сигнал превышает пороговое значение выше уровня шума, обнаружение отправляется оператору "первым пришел - первым обслужен" (FIFO) (как представлено функциональным блоком 722) для его обработки для сжатия/демодуляции. Обнаружение состоит из времени UTC по отношению к секунде времени появления сигнала, соответствующего смещения выборки, на котором произошло обнаружение, и элемента разрешения по частоте, на котором присутствовал пик.
[0087] В некоторых сценариях применяется коррелятор 4096 элементарных посылок. Этот коррелятор элементарных посылок может обеспечивать приблизительно 30 дБ усиления для входного сигнала. Это может быть достаточно для нисходящего канала DASS для различных сценариев помех с учетом ожидаемой мощности передачи маяка DSSS.
[0088] Кластеризация
[0089] Пики обнаружения обычно имеют субпики, смежные по времени и частоте. Функция кластеризации идентифицирует эти кластеры и извлекает центральный пик из кластера.
[0090] Уточнение обнаружения
[0091] Затем центральные пики используются вместе со сложными данными, соответствующими обнаруженной пачке импульсов, для уточнения оценок времени и частоты от детектора. Эти уточнения используются в качестве вспомогательных средств в процессе сжатия/демодуляции. Выборки сохраняются в кольцевом буфере, называемом сервером данных. На сервер данных поступает запрос на массив выборок, индексированных в кольцевом буфере при конкретном смещении времени. Этот массив представляет собой набор супердискретизированных комплексных выборок. Частота следования элементарных посылок сигнала может составлять 38400 элементарных посылок в секунду (CPS). Данные могут выбираться при частоте 153600 выборок в секунду (SPS), что выбрано равным четырехкратному (4) от частоты следования элементарных посылок. С использованием обнаруженной частоты данные преобразуются с понижением и выполняется FFT (например, FFT с 16000 точками). Из элемента разрешения обнаружения пиков, для нахождения центроида с частотой менее 1 Гц используются смежные частоты. Для увеличенного временного разрешения, выборки, смещенные в диапазоне от +3 до -3 от пика, параболически аппроксимируются с помощью кривой, чтобы найти смещение времени подвыборки. Эти уточнения могут быть применены к значениям времени обнаружения и частоты. На фиг. 8 представлено схематическое изображение, показывающее пики, уточненные с использованием FFT с более высоким разрешением.
[0092] Сжатие/Демодуляция
[0093] С использованием уточненной частоты из компонента обработки пика, обеспечивается готовность выборок пачки импульсов для сжатия и демодуляции. На фиг. 9 представлена функциональная блок-схема для операций сжатия и демодуляции, выполняемых в настоящем изобретении. Как представлено на фиг. 9, операции сжатия/демодуляции в целом включают в себя: операции понижающего преобразования, выполняемые понижающим преобразователем 902; согласованные операции фильтрации, выполняемые согласованным фильтром 904; операции оценки несущей, выполняемые устройством 906 оценки несущей; операции сжатия/демодуляции, выполняемые устройством сжатия/демодулятором 908; и операции оценки TOA/FOA, выполняемые устройством 910 оценки TOA/FOA.
[0094] Операции понижающего преобразования понижающего преобразователя 902 используются для удаления большей части доплеровского смещения с использованием уточненной частоты из компонента обработки пиков. Операции согласованной фильтрации согласованного фильтра 904 могут быть достигнуты с использованием фильтра нижних частот для согласования с фильтрацией с косинусоидальным сглаживанием (Root Raised Cosine, RRC) сигнала маяка. Операции оценки несущей устройства 906 оценки несущей включают в себя использование всей пачки импульсов для оценки фазы несущей для каждого символа в начальной части и аппроксимацию результатов с помощью кривой. Результат используется в качестве ввода для операций сжатия устройства сжатия/демодулятора 908.
[0095] В некоторых сценариях операции повторной выборки (не представлены на фиг. 9) выполняются ресемплером для уменьшения частоты выборки на одну элементарную посылку. Например, ресемплер может уменьшить частоту от четырех (4) выборок на одну элементарную посылку до трех (3) выборок на одну элементарную посылку. Ресемплер также может обеспечивать ранние, поздние и своевременные выборки для использования в операциях сжатия. Ресемплер может дополнительно принимать сигнал ошибки от устройства слежения элементарных посылок (не представлено на фиг. 9) для регулировки частоты повторной выборки. Смещение повторной выборки может быть использовано для интерполяции временной метки для каждой элементарной посылки.
[0096] Операции сжатия устройства сжатия/демодулятора 908 включают в себя: применение последовательности сжатия для ранних, поздних, своевременных и относящихся к шуму выборок; накопление количества элементарных посылок в символе (коэффициент расширения) для получения разумной оценки SNR; и отправку этой информации в компоненты слежения элементарных посылок и демодуляции.
[0097] Слежение элементарных посылок может использовать объединенные ранние, поздние и своевременные выборки из операций сжатия для обеспечения сигнала ошибки для ресемплера. Ошибка модуля автоподстройки задержки (DLL) возникает из-за раннего-позднего взятия (или позднего-раннего взятия). Когда имеет место синхронизация по фазе, своевременная выборка находится на своем значении пика, при этом ранняя и поздняя выборки равны (разница или ошибка равна нулю). Когда синхронизация отключена, выборки скользят к левой или правой стороне треугольника, вызывая дисбаланс в ранней и поздней выборках. DLL вычисляет фильтрованную ошибку и регулирует частоту повторной выборки для исправления ошибки. Остаточная фаза своевременной выборки используется для отслеживания и удаления остаточного допплеровского эффекта на носящей. Значения остаточного допплеровского эффекта сохраняются для их использования для уточненной оценки FOA. Временные метки первой элементарной посылки каждого символа сохраняются для их использования для уточненной оценки ТОА. Взаимодействие устройства слежения с перестройкой и повторной выборкой иллюстрировано на фиг. 10.
[0098] Операции демодуляции устройства сжатия/демодулятора 908 включают в себя: взятие мгновенных накопленных выборок из устройств слежения; принятие жестких решений о битах; и пересылку демодулированных битов в компонент исправления ошибок. Исправление ошибок может быть достигнуто с использованием декодера ВСН в соответствии с параметрами, применяемыми к сигналу. Исправление ошибок выполняется для исправления ошибок в битах. Если полезная нагрузка сообщения зашифрована или закодирована для аутентификации, применяемый алгоритм может быть применен к выборкам с исправленными ошибками.
[0099] В некоторых сценариях все компоненты, за исключением процессора 914 GEO, реализованы в программном обеспечении. Настоящее решение не ограничено в этом отношении. Каждый из компонентов, представленных на фиг. 9, может быть реализован в аппаратных средствах, программном обеспечении или их комбинации.
[00100] Разметка времени и частоты
[00101] Один из выходов устройств 1002 слежения элементарных посылок и ошибок на фиг. 10 может представлять собой массив выборок временных меток из каждого символа в сообщении. Этот набор выборок представляет собой аппроксимацию с помощью кривой для вычисления уточненной оценки ТОА. Смещения частоты, обеспечиваемые устройством слежения, также аппроксимируются с помощью кривой для вычисления уточненной оценки FOA.
[00102] Атмосферная динамика
[00103] Дополнительное уточнение ТОА достигается путем: определения положения спутника; вычисления атмосферной и релятивистской задержки, повлиявшей на обнаруженный модулированный несущий сигнал в течение его передачи; и применения атмосферной и релятивистской задержки к высокоточному ТОА. Выход этого процесса представляет собой дополнительно уточненное ТОА (например, ТОА с точностью измерения по меньшей мере 100 нс).
[00104] Каждый из спутников DASS имеет уникальную групповую задержку, влияющую на ТОА на наземной станции. Погрешность для каждого спутника определяется с помощью процедуры вычисления смещений групповой задержки. Эта задержка применяется к ТОА перед обработкой геопозиционирования.
[00105] Обработка геопозиционирования
[00106] Выход устройства сжатия/демодулятора 908 представляет собой пакет данных полезной нагрузки с исправленными ошибками с соответствующими оценками ТОА и FOA. Для каждой из подсистем DSSS (например, подсистемы 114-120 на фиг. 1) эти пакеты могут быть сохранены на сервере (например, сервер 112 на фиг. 1). Затем пакеты связываются в устройстве обработки местоположения GEO (например, устройство 160 на фиг. 1) и вычисляется решение.
[00107] Иллюстративные способы определения высокоточного ТОА
[00108] Высокоточное ТОА определяется в течение процесса измерения ТОА. Вводом для процесса измерения ТОА является приблизительное ТОА. В некоторых сценариях приблизительное ТОА определяется путем: захвата сигнала RF на понижающем преобразователе; обеспечения аналогового сигнала RF, преобразованного с понижением, для преобразователя A/D; обеспечения цифрового сигнала для семплера; генерирования множества входных выборок путем выборки спектра RF с использованием цифрового сигнала, выходящего из преобразователя A/D; и взаимной корреляции входных выборок (на основе последовательной выборки) с выборками локальной копии кода PN (т.е. кода, представляющего целевой сигнал или реплику целевого сигнала) для идентификации пиков. В некоторых случаях доплеровский эффект должен решаться с помощью FFT. Термин "доплеровский эффект (эффекты)", используемый в данном документе, относится к изменению частоты волны для наблюдателя, движущегося относительно его источника. Взаимная корреляция сжимает сигнал, при этом FFT точно определяет, где находится пик по частоте.
[00109] Нежелательно обрабатывать или дополнительно обрабатывать каждый потенциальный пик. Соответственно используется пороговое значение, представляющее собой уровень, выше которого производится фактическое обнаружение. Определение порогового значения обеспечивает способ различать шум, вызывающий обнаружение ложного сигнала, и шум с достаточной энергией, чтобы считаться сигналом. Определение порогового значения включает в себя определение пересечения порогового значения путем сравнения уровней энергии выборки с пороговым значением. Отмечается выборка, связанная с пересечением порогового значения. Число отсчетов выборки относительно времени суток известно. Это время суток представляет собой приблизительное ТОА. Временное разрешение приблизительного ТОА нежелательно в некоторых сценариях. Таким образом, выполняются дополнительные операции для улучшения точности оцененного ТОА.
[00110] Вводом дополнительных операций является приблизительное ТОА. Приблизительное ТОА используется для определения, какая выборка должна быть первой выборкой в последующих операциях понижающего преобразования. Выборка, связанная с приблизительным ТОА, используется в качестве первой выборки. Все последующие N-1 выборок также используются в последующих операциях понижающего преобразования, где N - целое число, выбранное для обеспечения требуемого разрешения для высокоточного ТОА. Затем частота этого набора из N выборок преобразуется с понижением до нуля Герц (0 Гц) для удаления допплеровских эффектов. Понижающее преобразование выполняется цифровым способом посредством обработки сигналов. Обработка сигнала включает в себя: умножение комплексной экспоненты с использованием элемента разрешения по частоте, на котором было выполнено обнаружение сигнала; и перемещение частоты обнаруженного сигнала до нуля Герц (0 Гц).
[00111] После этого сигнал (или выборки) фильтруется для воссоздания формы SinX/X исходного сигнала с расширенным спектром. Способы такой фильтрации хорошо известны в данной области техники. В данном изобретении может использоваться без ограничений любой известный или известный в будущем способ фильтрации для воссоздания формы SinX/X сигнала. В некоторых сценариях операции фильтрации представляют собой операции фильтрации с конечным импульсным откликом (FIR). Иллюстративные коэффициенты или параметры фильтра FIR представлены на фиг. 12. Иллюстративный входной сигнал для операций фильтрации представлен на левом графике на фиг. 14. Иллюстративный выходной сигнал операций фильтрации представлен на правом графике на фиг. 13.
[00112] Фильтрованные выборки используются затем в процессе взаимной корреляции. Процесс взаимной корреляции включает в себя взятие каждого набора выборок, представляющего один символ из локального кода PN. Каждый набор выборок содержит супердискретизированное количество элементарных посылок. Каждый символ содержит определенные количество элементарных посылок, представляющих этот символ. В некоторых случаях двести пятьдесят шесть (256) элементарных посылок представляют выборку. Путем четырехкратной (4) супердискретизации, одна тысяча двадцать четыре (1024) выборки для окна представляют один символ. Одна тысяча двадцать четыре (1024) выборки взаимно коррелируют с одной тысячью двадцать четырьмя (1024) выборками для получения взаимной корреляции между фильтрованными выборками и выборками кода PN для получения пика корреляции. Фиг. 14 содержит верхний левый график, показывающий наложение между обнаруженными выборками сигнала и версию устройства сдвига локального кода PN. Фиг. 14 также содержит нижний правый график, показывающий величину выхода из процесса взаимной корреляции. Пик корреляции затем используется для нахождения центра пика импульса для каждого символа обнаруженного сигнала. Фиг. 15 содержит график, показывающий иллюстративный центр пика корреляции одного символа.
[00113] Затем выполняется оценка символа. Оценка символа включает в себя: выбор двух значений пика с наивысшей величиной; и вычисление среднего значения для каждого символа для получения набора оценочных символов. Затем набор оценочных символов дополнительно преобразуется с понижением для удаления любого оставшегося смещения частоты. Набор оценочных символов затем используется для получения значения, представляющего удвоенную частоту центра. Частота центра затем дополнительно преобразуется с понижением для удаления любого следа доплеровских эффектов в обнаруженном сигнале перед определением высокоточного ТОА.
[00114] Теперь, когда все следы допплеровских эффектов были удалены из обнаруженного сигнала, набор обнаруженных выборок сигнала взаимно коррелируется с набором выборок из локального кода PN во многом таким же образом, как описано выше. Набор из W (например, 5) символов усредняется (поточечно), так что может быть получено лучшее измерение соотношения сигнала к шуму (SNR). Следует понимать, что сигнал растягивается или сокращается пропорционально допплеровскому эффекту. Соответственно, W представляет собой целочисленное значение, выбранное для улучшения SNR с учетом явления растяжения/сжатия. Например, чем больше доплеровский эффект, тем меньше значение W. Чем меньше доплеровский эффект, тем больше значение W. Для каждого набора символов W выполняется аппроксимация с помощью параболической кривой, чтобы могло быть определено интерполированное смещение частоты подвыборки. На фиг. 19 представлены результаты одного вычисления скользящего окна W символов. Эти результаты используются для генерирования аппроксимации с помощью параболической кривой, представленной на фиг. 20. Аппроксимация с помощью параболической кривой используется для поиска интерполированного значения максимума пика. На фиг. 21 представлен график, отображающий интерполированные значения пика для каждого окна из пяти символов. Как видно из фиг. 21, смещение выборки увеличивается с течением времени, так что сигнал растягивается (сжимается). ТОА в этой точке представляет собой значение точки пересечения, вычисленное из аппроксимации с помощью параболической кривой. Исходное приблизительное ТОА уточняется с помощью значения точки пересечения. Высокоточное ТОА получается путем деления значения точки пересечения (т.е. смещения выборки) на частоту выборки.
[00115] Вышеописанный процесс схематично представлен на фиг. 11. На фиг. 11 представлена блок-схема иллюстративного способа 1100 определения высокоточного ТОА. Способ 1100 начинается с этапа 1102 и продолжается на этапе 1104, на котором обнаруживается сигнал с расширенным спектром. После обнаружения сигнала с расширенным спектром, приблизительное ТОА определяется путем: выборки спектра RF; сохранения выборочной копии кода PN, используемого в сигнале с расширенным спектром; взаимной корреляции копии кода PN с входными выборками спектра RF; выполнения FFT на выходе корреляции для нахождения пика корреляции (наличие сигнала с расширенным спектром); и определения порогового значения энергии, выше которого будет происходить дальнейший процесс. Если энергия превышает пороговое значение, то делается запись о конкретном смещении выборки и элементе разрешения по частоте, на котором происходит пересечение порогового значения. Затем для определения приблизительного ТОА используются смещение выборки и элемент разрешения по частоте. После определения приблизительного ТОА начинается процесс измерения высокоточного ТОА.
[00116] Процесс измерения высокоточного ТОА описан по отношению к этапам 1106-1128. Эти этапы включают в себя: понижающее преобразование сигнала с расширенным спектром до 0 Гц для удаления допплеровского эффекта путем (а) использования набора выборок, содержащих длину передаваемого сигнала с расширенным спектром, начиная с пересечения порогового значения и элемента разрешения по частоте, и (b) умножения выборок на комплексную экспоненту; и фильтрацию сигнала с расширенным спектром с использованием набора выборок, преобразованного с понижением, которые содержат длину передаваемого сигнала с расширенным спектром. Фильтрация включает в себя сглаживание сигнала с расширенным спектром для согласования со спектром сигнала DSSS. В некоторых сценариях длина фильтра составляет семь (7), т.е. не с точностью две (2) элементарные посылки с частотой выборки (fs), равной четырем (4) выборкам на элементарную посылку.
[00117] После завершения этапа 1108 способ 1100 продолжается на этапах 1110-1114. Эти этапы включают в себя использование фильтрованных выборок для: извлечения набора выборок локального кода PN, содержащих символ k; взаимную корреляцию набора локальных выборок PN с сигналом поперек окна; и повтор извлечения и взаимной корреляции для символа k+1. В некоторых сценариях окно представляет собой +/- N выборок (например, 9 выборок) от пересечения порогового значения. Символ содержит 256 элементарных посылок, помноженные на 4 выборки на одну элементарную посылку (т.е. 1024 бит). Настоящее решение не ограничивается деталями этого примера. Корреляция каждого символа производит импульс пика. Таким образом, на следующем этапе 1116 центр импульса пика для каждого символа определяется с использованием выходов операций взаимной корреляции. На фиг. 15 представлен иллюстративный центр пика корреляции символа.
[00118] На следующем этапе 1118 находятся два наилучших значения пика с использованием окон корреляции для каждой выборки. Затем на этапе 1120 взвешиваются два наибольших значения пика с помощью масштабного коэффициента. Затем масштабированные значения пика суммируются для установления амплитуды и фазы символа.
[00119] Когда этап 1120 завершен, выполняется этап 1122. На этапе 1122 определяется оценка частоты с использованием установленных символов. Установленные символы используются для: оценки уточненной частоты центра; и нахождения интерполированного пика. Уточненный центральный пик оценивается с использованием FFT по первым М символам. В некоторых сценариях М равно сто двадцати восьми (128). В этом случае оценочная уточненная частота центра определяется следующими математическими уравнениями:
xd=symbols(1:128)*symbols(1:128)
faxis=0.5*(CHIP_RATE/CHIPS_PER_SYMBOL)*[-64:63]/128
X=FFTshift(abs(FFT(xd))),
где X представляет оценочную уточненную частоту центра. Интерполированный пик находится с использованием способа аппроксимации с помощью кривой. Способ аппроксимации с помощью кривой включает в себя аппроксимацию пика с помощью кривой. Производная от аппроксимирующей кривой равна нулю (0) для нахождения FOA. На фиг. 18 представлена иллюстративная FOA, полученная из результатов способа аппроксимации с помощью кривой. С использованием FOA, сигнал преобразуется с понижением до 0 Гц. FOA сигнала представляет собой FOA от детектора плюс уточненная FOA.
[00120] После этого на этапе 1124 повторяются оконные корреляции символов, чтобы собрать новые окна корреляции символов. Новые окна корреляции символов затем используются на этапе 1126 для объединения окон корреляции из значения интерполированного пика и нахождения этого значения интерполированного пика по окну из K символов(например, 5 символов). Затем процесс включает в себя пошаговый переход на один символ и объединение следующего набора из K символов. Фиг. 19 содержит схематическое изображение, полезное для понимания того, как объединяется набор K символов. На фиг. 20 представлен график, показывающий объединенные значения пика по K символам. Фиг. 21 содержит график, показывающий объединенные значения пика корреляции по K символам.
[00121] На следующем этапе 1128 определяется оценка ТОА. Оценка ТОА определяется путем: использования значений интерполированного пика для каждого скользящего среднего K символов для построения зависимости выборки (смещения по времени) при значениях пика от номера символа; и аппроксимации, с помощью кривой, зависимости символов от смещения выборки. Аппроксимация с помощью кривой - это функция, определяющая смещение выборки при ее изменении со временем. Значение точки пересечения (х=0) - это функция зависимости выборки от порогового значения, при пересечении которого обнаруживается сигнал. Фиг. 22 содержит график, показывающий аппроксимацию, с помощью кривой, смещений выборки пика символов. Фиг. 23 содержит графики, полезные для понимания замедления/сокращения времени.
[00122] На фиг. 24 представлена блок-схема иллюстративного способа 2400 определения высокоточного ТОА. Способ 2400 начинается с этапа 2402 и продолжается на этапе 2404, на котором определяются приблизительное ТОА и приблизительная FOA, посредством обнаружения сигнала, для выборки исходного несущего информацию сигнала. На следующем этапе 2406 выполняется процесс многокаскадного понижающего преобразования с использованием, по меньшей мере, выборок, связанных с приблизительной FOA в точке обнаружения, для удаления допплеровского эффекта из исходного несущего информацию сигнала. Затем, на этапе 2408 первый набор выборок из исходного несущего информацию сигнала взаимно коррелируется со вторым набором выборок из локальной копии последовательности кода PN для определения пика взаимной корреляции. Пик взаимной корреляции используется на этапе 2410 для нахождения первого временного центра пика для импульса для каждого символа исходного несущего информацию сигнала. Пик корреляции используется на этапе 2412 для нахождения первого временного центра пика для каждого символа исходного несущего информацию сигнала. Первый временной центр пика используется на этапе 2414 для получения набора первых оценочных символов. Набор оценочных символов используется на этапе 2416 для получения значения, представляющего удвоенную частоту центра. Первый набор выборок преобразуется с понижением на этапе 2418 с использованием частоты центра для удаления любого оставшегося следа допплеровского эффекта из исходного несущего информацию сигнала. После этого выполняется этап 2420, на котором способ 2400 заканчивается или выполняется другая обработка.
[00123] На фиг. 25 представлена блок-схема иллюстративного способа 2500 для понимания процесса ТОА высокого разрешения. Процесс ТОА высокого разрешения может быть выполнен после завершения описанного выше способа 2400.
[00124] Способ 2500 начинается с этапа 2502 и продолжается на этапе 2504, на котором получают пик корреляции путем взаимной корреляции первого набора выборок, полученных из исходного несущего информацию сигнала с удаленным допплеровским эффектом, со вторым набором выборок, полученных из локальной копии последовательности кода PN. Затем на этапе 2506 используется второй временной центр пика для получения набора оценочных символов. Затем на этапе 2508 генерируется аппроксимация с помощью кривой (например, линейной) с использованием набора оценочных символов. Высокоточное ТОА определяется на этапе 2510 путем деления значения точки пересечения частоты последовательной выборки. Значение точки пересечения получается с использованием аппроксимации с помощью кривой и выборок, связанных с приблизительным ТОА. После этого выполняется этап 2512, на котором способ 2500 заканчивается или выполняется другая обработка.
[00125] Все раскрытые и заявленные в данном изобретении устройства, способы и алгоритмы могут быть выполнены и исполнены без излишних экспериментальных работ в свете настоящего раскрытия. Хотя изобретение описано в терминах предпочтительных вариантов осуществления, специалисту в данной области техники очевидно, что устройство, способы и последовательность этапов способа могут быть изменены без отхода от концепции, сущности и объема изобретения. В частности очевидно, что некоторые компоненты могут быть добавлены, объединены или заменены компонентами, описанными в данном документе, при этом могут быть достигнуты те же самые или сходные результаты. Все эти сходные замены и модификации, очевидные специалисту в данной области техники, считаются находящимися в пределах сущности, объема и концепции изобретения, как оно определено.
[00126] Описанные выше признаки и функции, а также альтернативы могут быть объединены во множество других различных систем или приложений. Специалист в данной области может выполнить различные ранее непредусмотренные или непредвиденные альтернативы, модификации, изменения или улучшения, каждое из которых также должно охватываться раскрытыми вариантами осуществления.
Реферат
Изобретение относится к технике связи и может использоваться для определения точного местоположения источника сигнала передачи. Технический результат состоит в повышении точности определения местоположения средств передачи. Для этого способы содержат: демодуляцию, с помощью приемника устройства связи, обнаруженного несущего сигнала, модулированного с помощью последовательности кода псевдошума (РN), для получения из него исходного несущего информацию сигнала; вычисление, с помощью приемника, смещений временной задержки с использованием корреляций окон кода псевдошума для каждого символа исходного несущего информацию сигнала; определение, с помощью приемника, высокоточного времени прибытия (ТОА) обнаруженного несущего сигнала с использованием смещений временной задержки; и использование, с помощью приемника, высокоточного времени прибытия для определения точного местоположения источника исходного несущего информацию сигнала передачи. 3 н. и 12 з.п. ф-лы, 25 ил.
Комментарии