Динамическая обработка запроса позиции измерения в мобильной радиосети - RU2464589C2
Код документа: RU2464589C2
Чертежи






















Описание
Перекрестная ссылка на связанные заявки
[0001] Настоящая заявка испрашивает приоритет, согласно §119 раздела 35 свода законов США, предварительной заявки на патент США 60/971453, именуемой "GSM Control Plane Positioning Preemption RRLP Implementation for MS and SMLC", поданной 11 сентября 2007 (имеющей номер в реестре поверенного 072346P1); и предварительной заявки на патент США 61/012039, именуемой "GSM Control Plane Positioning Preemption RRLP Implementation for MS and SMLC", поданной 6 декабря 2007 (имеющей номер в реестре поверенного 072346P2), раскрытия которых тем самым включаются здесь по ссылке.
Область техники, к которой относится изобретение
[0002] Настоящее изобретение в целом относится к системам связи и, более конкретно, к улучшению определения местоположения, используя глобальную спутниковую навигационную систему.
Предшествующий уровень техники
[0003] Часто желательно, и иногда необходимо, знать местоположение мобильной станции (например, сотового телефона). В настоящем описании термины "местоположение" и "позиция" являются синонимами и в настоящем описании используются взаимозаменяемо. Например, пользователь может использовать мобильную станцию (MS, МС) для просмотра вебсайта и может выполнить щелчок мышью на контенте, чувствительном к местоположению. Затем местоположение мобильной станции может быть определено и использовано для обеспечения подходящего контента пользователю. Существует много других сценариев, в которых знание местоположения мобильной станции является полезным или необходимым. Например, мандат 911 Федеральной Комиссии по связи требует, чтобы несущие обеспечивали усовершенствованные службы 911, включающие в себя географическое определение местоположения мобильной станции, делающей вызов аварийных служб 911. Мобильная станция может быть обеспечена таким образом, что она может получать службы местоположения из домашней сети и также во время роуминга в посещаемой сети. Мобильная станция может связываться с различными объектами сети в домашней сети, чтобы определить местоположение мобильной станции, когда это необходимо.
[0004] Существует много различных типов технологий, используемых в вычислении местоположения мобильных станций в беспроводных сетях с различными уровнями успеха и точности. Способы, основанные на сети, включают в себя угол приема (AOA), использующий по меньшей мере две вышки, разницу во времени приема ответного сигнала (TDOA), использующую мультилатерацию, и сигнатуру местоположения, использующую РЧ-след, для сопоставления РЧ-образцов, которые мобильные станции показывают в известных местоположениях. Различные способы, основанные на мобильной станции, объединяют GPS, Усовершенствованную Трилатерацию Прямой Линии связи (A-FLT), Отчет об Измерении Сети/ Усовершенствовании синхронизации (TA/NMR) и/или Усовершенствованную Наблюдаемую Разницу во времени (E-OTD).
[0005] Другой способ, основанный на мобильной станции, является вспомогательным GPS (A-GPS), в котором сервер обеспечивает Assistance Data (Вспомогательные данные) для мобильной станции, чтобы она имела малое Время для Первой Фиксации (TTFF), чтобы разрешить захват слабого сигнала и оптимизировать использование батареи мобильной станции. A-GPS используется в качестве технологии определения местоположения изолированно или совместно с другими технологиями позиционирования, которые обеспечивают подобные диапазону измерения. Сервер A-GPS выдает данные на беспроводную мобильную станцию, которые являются специфическими для приблизительного местоположения мобильной станции. Вспомогательные данные помогают мобильной станции быстро устанавливаться на спутниках и потенциально позволяют телефонной трубке фиксироваться на слабых сигналах. Затем мобильная станция выполняет вычисление позиции или необязательно возвращает фазы измеренного кода на сервер, чтобы сделать вычисление. Сервер A-GPS может использовать дополнительную информацию, такую как измерения времени передачи сигналов туда и обратно от сотовой базовой станции до мобильной станции, чтобы вычислить местоположение, где иначе это может не быть возможно; например, когда не существует достаточно видимых спутников GPS.
[0006] Достижения в глобальной системе позиционирования, основанной на спутнике (GPS), Усовершенствовании синхронизации (TA) и привязки позиции согласно технологии Усовершенствованной Наблюдаемой Разницы во времени (E-OTD), позволяют выполнить точное определение географической позиции (например, широты и долготы) мобильной станции. Поскольку службы географического определения местоположения используются в пределах сетей беспроводной связи, такая позиционная информация может быть сохранена в элементах сети и поставляться узлам в сети, используя сообщения сигнализации. Такая информация может храниться в Обслуживающем Мобильном Центре Определения местоположения (SMLC), Автономном - SMLC (SAS), Объекте Определения Позиции (PDE), на Безопасной Платформе Определения местоположения Плоскости Пользователя (SLP) и базах данных определения местоположения мобильного абонента специального назначения.
[0007] Одним примером базы данных определения местоположения мобильного абонента специального назначения является SMLC, предложенный Проектом Партнерства Третьего поколения (3GPP). В частности, 3GPP определил протокол сигнализации для передачи позиционной информации мобильного абонента на и от SMLC. Этот протокол сигнализации называется протоколом LCS (Службы определения местоположения) Радиоресурса, обозначаемым RRLP, и определяет сообщения сигнализации, передающиеся между мобильной станцией и SMLC, связанным с местоположением мобильного абонента. Подробное описание протокола RRLP имеется в Проекте Партнерства Третьего поколения 3GPP TS 44.031 v7.9.0 (2008-06); Technical Specification Group GSM Edge Radio Access Network; Location Services (LCS); Протоколе LCS Радиоресурсов Мобильная Станция - Обслуживающий Мобильный Центр Определения местоположения (SMLC) (выпуск 7).
[0008] В дополнение к Глобальной Системе Позиционирования Соединенных Штатов (GPS) другие Спутниковые Системы Позиционирования (SPS), такие как российская система GLONASS или предложенная европейская система Galileo, могут также быть использованы для определения позиции мобильной станции. Однако каждая из систем работает согласно различным описаниям.
[0009] Одним недостатком системы определения местоположения, основанной на спутнике, является время, затраченное на получение точной привязки позиции. Обычно точность позиции является компромиссом скорости захвата и наоборот. Таким образом, более точная привязка занимает больше времени. Соответственно, существует необходимость в системе связи, включающей в себя глобальную спутниковую навигационную систему (GNSS), которая может определять местоположение для мобильной станции на основании спутниковых сигналов, посланных от двух или более спутников, чтобы обеспечивать дополнительную эффективность и преимущества для определения местоположения, включая повышенную точность. Существует необходимость в повышении точности, в то же время не влияя пагубным образом на скорость захвата или конечное время захвата при получении привязки позиции мобильной станции, например, во время вызова аварийных служб (ES) или сеанса связи с дополнительными платными услугами (VAS).
Сущность изобретения
[0010] Некоторые варианты осуществления настоящего изобретения предусматривают способ увеличения данных местоположения мобильной станции в беспроводной сети, выполняемый в мобильной станции, содержащий: прием сообщения Measure Position Request (Запрос измерения позиции), содержащего точность сети и время ответа сети; выбор точности между точностью сети и временной точностью, отличной от точности сети, определяющей данные местоположения мобильной станции, используя выбранную точность; формирование сообщения Measure Position Response (Ответ измерения позиции) в ответ на сообщение запроса измерения позиции, в котором сообщение ответа измерения позиции содержит данные местоположения; передачу сообщения ответа измерения позиции. В этом способе временная точность представляет точность меньше, чем точность сети. В этом способе временная точность представляет неопределенность больше чем 100 метров. В этом способе временная точность представляет точность больше, чем точность сети. В этом способе временная точность представляет неопределенность меньше чем 10 метров. В этом способе временная точность представляет неопределенность 0 метров. В этом способе процесс выбора содержит определение, имел ли место ранее повторный запрос. В этом способе сообщение запроса измерения позиции содержит сообщение запроса измерения позиции по протоколу RRLP. В этом способе сообщение ответа измерения позиции содержит сообщение ответа измерения позиции по протоколу RRLP.
[0011] Некоторые варианты осуществления настоящего изобретения предусматривают способ увеличения данных местоположения мобильной станции в беспроводной сети, выполняемый в сети, содержащий: выбор точности между точностью сети и временной точностью, отличающейся от точности сети; передачу сообщения запроса измерения позиции, содержащего выбранную точность и время ответа сети; и прием сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, в котором сообщение ответа измерения позиции содержит данные местоположения. В этом способе временная точность представляет точность меньше, чем точность сети. В этом способе временная точность представляет неопределенность больше чем 100 метров. В этом способе временная точность представляет точность больше, чем точность сети. В этом способе временная точность представляет неопределенность меньше чем 10 метров. В этом способе временная точность представляет неопределенность 0 метров. В этом способе процесс выбора содержит определение выбранной точности на основании того, имел ли место ранее повторный запрос. В этом способе сообщение запроса измерения позиции содержит сообщение запроса измерения позиции по протоколу RRLP. В этом способе сообщение ответа измерения позиции содержит сообщение ответа измерения позиции по протоколу RRLP.
[0012] Некоторые варианты осуществления настоящего изобретения предусматривают мобильную станцию для увеличения данных местоположения мобильной станции в беспроводной сети, причем мобильная станция содержит: приемник для приема сообщения запроса измерения позиции, содержащего точность сети и время ответа сети; логику для выбора точности между точностью сети и временной точностью, отличной от точности сети; подсистему определения местоположения для определения данных местоположения мобильной станции, используя выбранную точность; логику для формирования сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, в котором сообщение ответа измерения позиции содержит данные местоположения; передатчик для передачи сообщения ответа измерения позиции. В этой мобильной станции временная точность представляет точность меньше, чем точность сети. В этой мобильной станции временная точность представляет точность больше, чем точность сети. В этой мобильной станции сообщение запроса измерения позиции содержит сообщение запроса измерения позиции по протоколу RRLP. В этой мобильной станции сообщение ответа измерения позиции содержит сообщение ответа измерения позиции по протоколу RRLP.
[0013] Некоторые варианты осуществления настоящего изобретения предусматривают сеть для увеличения данных местоположения мобильной станции в беспроводной сети, причем сеть содержит: логику для выбора точности между точностью сети и временной точностью, отличной от точности сети; передатчик для передачи сообщения запроса измерения позиции, содержащего выбранную точность и время ответа сети; и приемник для приема сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, в котором сообщение ответа измерения позиции содержит данные местоположения. В этой сети временная точность представляет точность меньше, чем точность сети. В этой сети временная точность представляет точность больше, чем точность сети. В этой сети сообщение запроса измерения позиции содержит сообщение запроса измерения позиции по протоколу RRLP. В этой сети сообщение ответа измерения позиции содержит сообщение ответа измерения позиции по протоколу RRLP.
[0014] Некоторые варианты осуществления настоящего изобретения предусматривают мобильную станцию для увеличения данных местоположения мобильной станции в беспроводной сети, причем мобильная станция содержит: средство для приема сообщения запроса измерения позиции, содержащего точность сети и время ответа сети; средство для выбора точности между точностью сети и временной точностью, отличной от точности сети, средство для определения данных местоположения мобильной станции, используя выбранную точность; средство для формирования сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, в котором сообщение ответа измерения позиции содержит данные местоположения; средство для передачи сообщения ответа измерения позиции. В этой мобильной станции временная точность представляет точность меньше, чем точность сети. В этой мобильной станции временная точность представляет точность больше, чем точность сети. В этой мобильной станции сообщение запроса измерения позиции содержит сообщение запроса измерения позиции по протоколу RRLP. В этой мобильной станции сообщение ответа измерения позиции содержит сообщение ответа измерения позиции по протоколу RRLP.
[0015] Некоторые варианты осуществления настоящего изобретения предусматривают сеть для увеличения данных местоположения мобильной станции в беспроводной сети, причем сеть содержит: средство для выбора точности между точностью сети и временной точностью, отличной от точности сети; средство для передачи сообщения запроса измерения позиции, содержащего выбранную точность и время ответа сети; и средство для приема сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, в котором сообщение ответа измерения позиции содержит данные местоположения. В этой сети временная точность представляет точность меньше, чем точность сети. В этой сети временная точность представляет точность больше, чем точность сети. В этой сети средство для выбора содержит средство для определения выбранной точности на основании того, имел ли место ранее повторный запрос. В этой сети сообщение запроса измерения позиции содержит сообщение запроса измерения позиции по протоколу RRLP. В этой сети сообщение ответа измерения позиции содержит сообщение ответа измерения позиции по протоколу RRLP.
[0016] Некоторые варианты осуществления настоящего изобретения предусматривают считываемый компьютером продукт, содержащий считываемый компьютером носитель, содержащий: код, чтобы заставить по меньшей мере один компьютер принимать сообщение запроса измерения позиции, содержащее точность сети и время ответа сети; код, чтобы заставить по меньшей мере один компьютер выбирать точность между точностью сети и временной точностью, отличной от точности сети, код, чтобы заставить по меньшей мере один компьютер определять данные местоположения мобильной станции, используя выбранную точность; код, чтобы заставить по меньшей мере один компьютер формировать сообщение ответа измерения позиции в ответ на сообщение запроса измерения позиции, в котором сообщение ответа измерения позиции содержит данные местоположения; код, чтобы заставить по меньшей мере один компьютер передавать сообщение ответа измерения позиции. В этом считываемом компьютером продукте временная точность представляет точность меньше, чем точность сети. В этом считываемом компьютером продукте временная точность представляет точность больше, чем точность сети. В этом считываемом компьютером продукте код, чтобы заставить по меньшей мере один компьютер определять данные местоположения мобильной станции, используя выбранную точность, содержит код, чтобы заставить по меньшей мере один компьютер определять, имел ли место ранее повторный запрос. В этом считываемом компьютером продукте сообщение запроса измерения позиции содержит сообщение запроса измерения позиции по протоколу RRLP. В этом считываемом компьютером продукте сообщение ответа измерения позиции содержит сообщение ответа измерения позиции по протоколу RRLP.
[0017] Некоторые варианты осуществления настоящего изобретения предусматривают считываемый компьютером продукт, содержащий считываемый компьютером носитель, содержащий: код, чтобы заставить по меньшей мере один компьютер выбирать точность между точностью сети и временной точностью, отличной от точности сети; код, чтобы заставить по меньшей мере один компьютер передавать сообщение запроса измерения позиции, содержащее выбранную точность и время ответа сети; и код, чтобы заставить по меньшей мере один компьютер принимать сообщение ответа измерения позиции в ответ на сообщение запроса измерения позиции, в котором сообщение ответа измерения позиции содержит данные местоположения. В этом считываемом компьютером продукте временная точность представляет точность меньше, чем точность сети. В этом считываемом компьютером продукте временная точность представляет точность больше, чем точность сети. В этом считываемом компьютером продукте код, чтобы заставить по меньшей мере один компьютер выбирать точность между точностью сети и временной точностью, отличной от точности сети, содержит код, чтобы заставить по меньшей мере один компьютер определять выбранную точность на основании того, имел ли место ранее повторный запрос. В этом считываемом компьютером продукте сообщение запроса измерения позиции содержит сообщение запроса измерения позиции по протоколу RRLP. В этом считываемом компьютером продукте сообщение ответа измерения позиции содержит сообщение ответа измерения позиции по протоколу RRLP. Способ сокращения повторов сообщений запроса измерения позиции между сетью и мобильной станцией в беспроводной сети, содержащий: ожидание до заранее определенного времени, в котором заранее определенное время основано на данных местоположения времени; передачу в заранее определенное время сообщения запроса измерения позиции, содержащего время ответа сети и точность сети; и прием, в момент времени прежде, чем данные местоположения будут необходимы, сообщения ответа измерения позиции, содержащего данные местоположения. В этом способе время ответа сети содержит значение, представляющее сокращенное время ответа не больше чем 4 секунды. В этом способе точность сети содержит значение, представляющее низкую точность не меньше чем 100 метров. В этом способе запроса измерения позиции не содержит Вспомогательные данные. Способ дополнительно содержит: передачу сообщения Вспомогательных данных; и прием сообщения Ack Assistance Data (Подтверждение Вспомогательных данных). В этом способе сообщение запроса измерения позиции содержит сообщение запроса измерения позиции по протоколу RRLP. В этом способе сообщение ответа измерения позиции содержит сообщение ответа измерения позиции по протоколу RRLP.
[0018] Эти и другие аспекты, признаки и преимущества изобретения будут очевидны из ссылок на варианты осуществления, описанные ниже.
Краткое описание чертежей
[0019] Варианты осуществления изобретения описаны ниже только посредством примера, со ссылкой на чертежи.
[0020] ФИГ.1A, 1B и 1C показывают различные компоненты и интерфейсы в беспроводной сети.
[0021] ФИГ.2 показывает схему последовательности операций сообщения обычного процесса определения местоположения, используя сеансы связи RRLP.
[0022] ФИГ.3 показывает псевдосегментацию Вспомогательных данных.
[0023] ФИГ.4 и 5 иллюстрируют остановку определения позиции на основании МС, принимающей дополнительное сообщение RR.
[0024] ФИГ.6 и 7 показывают события, которые запускают и останавливают подсистему GPS, в соответствии с вариантами осуществления настоящего изобретения.
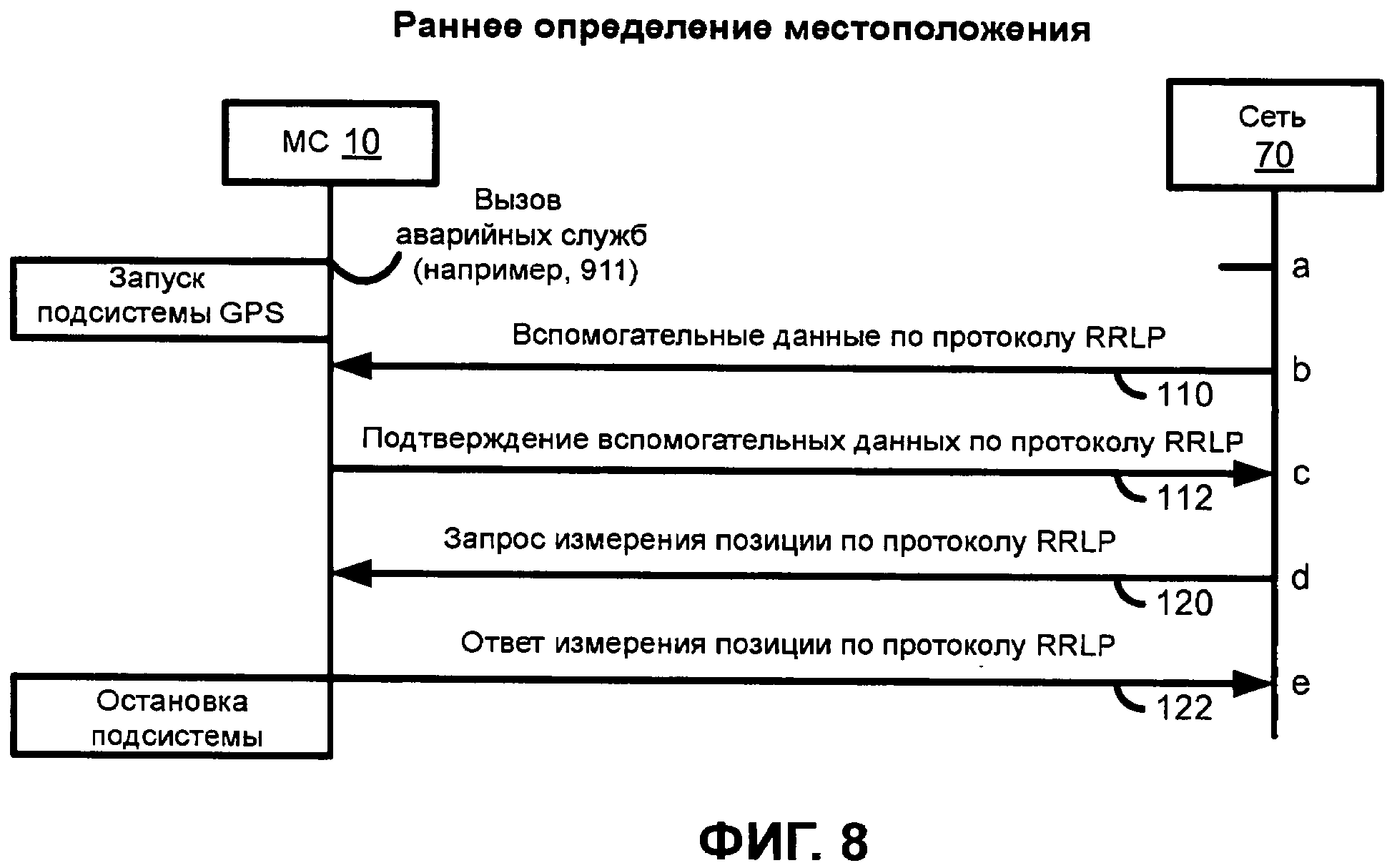
[0025] ФИГ.8 показывает схему последовательности операций сообщений, выделяющую раннее определение местоположения, в соответствии с вариантами осуществления настоящего изобретения.
[0026] ФИГ.9 и 10 иллюстрируют способ продолжения определения позиции после приема дополнительного сообщения RR в соответствии с вариантами осуществления настоящего изобретения.
[0027] ФИГ.11 и 12 иллюстрируют способ оптимального упорядочения загруженных вспомогательных данных в соответствии с вариантами осуществления настоящего изобретения.
[0028] ФИГ.13 и 14 показывают способ своевременной посылки запросов позиции в соответствии с вариантами осуществления настоящего изобретения.
[0029] ФИГ.15 и 16 показывают способ задержки (или пропуска) новых сообщений RR, чтобы избежать прекращенных сеансов связи, в соответствии с вариантами осуществления настоящего изобретения.
[0030] ФИГ.17, 18, 19, 20 и 21 иллюстрируют способ изменения параметра точности, чтобы сбалансировать время ответа и точность при вызове аварийных служб (ES), в соответствии с вариантами осуществления настоящего изобретения.
[0031] ФИГ.22 показывает схему последовательности операций сообщений для дополнительных платных услуг (VAS) в соответствии с вариантами осуществления настоящего изобретения.
Подробное описание изобретения
[0032] В следующем описании делается ссылка на сопроводительные чертежи, которые иллюстрируют несколько вариантов осуществления настоящего изобретения. Должно быть понятно, что могут быть использованы другие варианты осуществления, и могут быть сделаны механические, композиционные, структурные, электрические и оперативные изменения, не отступая от сущности и объема настоящего раскрытия. Следующее подробное описание не должно быть взято в ограничивающем смысле. Кроме того, некоторые части подробного описания, которые следуют ниже, представляются в терминах процедур, этапов, логических блоков, обработки и других символических представлений операций над битами данных, которые могут быть выполнены в электронных схемах или на машинной памяти.
[0033] Процедура, выполняемый компьютером этап, логический блок, процесс и т.д. понимаются в настоящем описании как последовательность этапов или команд, приводящих к желаемому результату. Этапами являются те, которые используют физические манипуляции физическими величинами. Эти величины могут принимать форму электрических, магнитных или радиосигналов, способных храниться, передаваться, объединяться, сравниваться и, иначе, управляться в электронных схемах или в компьютерной системе. Эти сигналы могут время от времени называться битами, значениями, элементами, символами, символьными знаками, терминами, числами или подобным. Каждый этап может быть выполнен аппаратным обеспечением, программным обеспечением, программно-аппаратным обеспечением или их комбинациями. Например, при реализации аппаратным обеспечением блок обработки данных может быть реализован в одной или более специализированных интегральных схемах (схем ASIC), цифровых сигнальных процессорах (процессорах DSP), устройствах цифровой обработкой сигналов (DSP), программируемых логических устройствах (устройствах PLD), программируемых пользователем вентильных матрицах (матрицах FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других модулях устройств, предназначенных для выполнения функций, описанных в настоящем описании, и/или их комбинациях.
[0034] В настоящем описании может быть сделана ссылка на "один пример", "один признак", "пример" или "признак", которые означают, что конкретный признак, структура или особенность, описанная в соединении с признаком и/или примером, включается по меньшей мере в один признак и/или пример заявленной сущности изобретения. Таким образом, фразами "в одном примере", "пример", "в одном признаке" или "признак" в различных местах описания не обязательно ссылаются на один и тот же признак и/или пример. Кроме того, конкретные признаки, структуры или особенности могут быть объединены в одном или более примерах и/или признаках.
[0035] "Команды", как упомянуто в настоящем описании, относятся к выражениям, которые представляют одну или более логических операций. Например, команды могут быть "считываемыми машиной", будучи интерпретированными машиной для выполнения одной или более операций над одним или более объектами данных. Однако это просто пример команд, и заявленная сущность изобретения не ограничивается этим. В другом примере команды, как упомянуто в настоящем описании, могут относиться к закодированным командам, которые выполняются устройством обработки данных, имеющем набор команд, который включает в себя закодированные команды. Такая команда может быть закодирована в форме машинного языка, понимаемого устройством обработки данных. Снова, это просто примеры команды, и заявленная сущность изобретения не ограничивается этим.
[0036] "Запоминающий носитель", как упомянуто в настоящем описании, относится к физическим средам, способным поддерживать выражения, которые являются различимыми посредством одной или более машин. Например, запоминающий носитель может содержать одно или более запоминающих устройств для хранения считываемых машиной команд и/или информации. Такие запоминающие устройства могут содержать любой один из нескольких видов сред, включающих в себя, например, магнитные, оптические или полупроводниковые запоминающие носители. Такие запоминающие устройства могут также содержать любой тип долгосрочных, краткосрочных, энергозависимых или энергонезависимых запоминающих устройств. Однако это просто примеры запоминающего носителя, и заявленная сущность изобретения не ограничивается этим. Термин "запоминающий носитель" не применяется к вакууму.
[0037] Пока конкретно не указано иначе, как очевидно из следующего рассмотрения, должно быть оценено, что во всем описании рассматривают использование терминов, таких как "обработка", "вычислительная обработка", "вычисление", "выбор", "формирование", "разрешение", "запрещение", "определение местоположения", "завершение", "идентификация", "инициализация", "обнаружение", "получение", "остановка", "поддержание", "представление", "оценка", "прием", "передача", "определение" и/или подобных, которые ссылаются на действия и/или процессы, которые могут быть выполнены компьютерной платформой, такой как компьютер или аналогичное электронное вычислительное устройство, которое управляет и/или преобразовывает данные, представленные в качестве физических электронных и/или магнитных параметров и/или других физических параметров в пределах процессоров компьютерной платформы, блоков памяти, регистров и/или других устройств для хранения, передачи, приема и/или отображения информации. Например, такие действия и/или процессы могут быть выполнены компьютерной платформой под управлением считываемых машиной команд, хранящихся в запоминающем носителе. Например, такие считываемые машиной команды могут содержать программное обеспечение или программно-аппаратное обеспечение, хранящееся в запоминающем носителе, включенном в качестве части компьютерной платформы (например, включенном в качестве части устройства обработки данных или внешнего к такому устройству обработки данных). Дополнительно, до тех пор, пока не будет конкретно указано иное, процессы, описанные в настоящем описании с ссылкой на схемы последовательности операций или иное, могут также быть выполнены и/или управляться полностью или частично такой компьютерной платформой.
[0038] Методики беспроводной связи, описанные в настоящем описании, могут находиться в соответствии с различными сетями беспроводной связи, такими как беспроводная глобальная сеть (WWAN), беспроводная локальная сеть (WLAN), беспроводная персональная сеть (WPAN) и так далее. В настоящем описании термин "сеть" и "система" могут быть использованы взаимозаменяемо. WWAN может быть сетью Множественного Доступа с Кодовым Разделением каналов (CDMA), сетью Множественного Доступа с Временным Разделением каналов (TDMA), сетью Множественного Доступа с Частотным Разделением каналов (FDMA), сетью Множественного Доступа с Ортогональным Частотным Разделением каналов (OFDMA), сетью Множественного Доступа с Частотным Разнесением каналов и Единственной Несущей (SC-FDMA) и так далее. Сеть CDMA может реализовывать одну или более технологий радиодоступа (технологий RAT), таких как cdma2000 или Широкополосный-CDMA (W-CDMA), если назвать только несколько радиотехнологий. В настоящем описании cdma2000 может включать в себя технологии, реализованные согласно стандартам IS-95, IS-2000 и IS-856. Сеть TDMA может реализовывать Глобальную Систему Мобильной связи (GSM), Цифровую Усовершенствованную Систему Мобильной Телефонной связи (D-AMPS) или некоторую другую RAT. GSM и W-CDMA описываются в документах от объединения, именуемого "Проект Партнерства Третьего поколения" (3GPP). Cdma 2000 описывается в документах от объединения, именуемого "Проект Партнерства Третьего поколения 2" (3GPP2). Документы 3GPP и 3GPP2 широко доступны. Например, WLAN может содержать сеть IEEE 802.11x, и WPAN может содержать сеть Bluetooth, IEEE 802.15x. Реализации беспроводной связи, описанные в настоящем описании, могут также быть использованы в соединении с любой комбинацией WWAN, WLAN и/или WPAN.
[0039] Устройство и/или система могут оценивать местоположение устройства, по меньшей мере частично, на основании сигналов, принятых от спутников. В частности, такое устройство и/или система могут получать измерения "псевдодиапазона", содержащие приближения расстояний между ассоциированными спутниками и навигационным спутниковым приемником. В конкретном примере такой псевдодиапазон может быть определен в приемнике, который способен обрабатывать сигналы от одного или более спутников в качестве части Спутниковой Системы Позиционирования (SPS). Например, такая SPS может содержать Глобальную Систему Позиционирования (GPS), Galileo, Glonass, если называть несколько или любую SPS, разработанную в будущем. Для определения своей позиции спутниковый навигационный приемник может получать измерения псевдодиапазона до трех или более спутников, а также их позиции во время передачи. Зная орбитальные параметры спутника, эти позиции могут быть вычислены для любой точки во времени. Затем измерение псевдодиапазона может быть определено, по меньшей мере частично, на основании времени, за которое сигнал проходит от спутника до приемника, умноженного на скорость света. В то время как методики, описанные в настоящем описании, могут быть обеспечены в качестве реализаций определения местоположения в GPS и/или Galileo типах SPS в качестве конкретных иллюстраций, должно быть понятно, что эти методики могут также применяться к другим типам SPS и что заявленная сущность изобретения не ограничивается этим.
[0040] Например, методики, описанные в настоящем описании, могут быть использованы любой одной из нескольких SPS, включающих в себя вышеупомянутую SPS. Кроме того, такие методики могут быть использованы системами определения позиционирования, которые используют псевдолиты (передатчики) или комбинацию спутников и псевдолитов. Псевдолиты могут содержать наземные передатчики, которые вещают псевдослучайный шумовой код (PRN) или другой код определения расстояния (например, аналогичный GPS или сигналу сотовой связи CDMA), модулированный на сигнале несущей L-полосы частот (или другой частоте), который может быть синхронизирован со временем GPS. Такому передатчику может быть назначен уникальный код PRN, чтобы разрешить идентификацию посредством удаленного приемника. Псевдолиты могут быть полезными в ситуациях, где сигналы SPS от орбитального спутника могли бы быть недоступными, например в туннелях, шахтах, зданиях, городских улицах или других закрытых областях. Другая реализация псевдолитов известна как радиомаяки. Термин "спутник", как используется в настоящем описании, предназначается, чтобы включать в себя псевдолиты, эквиваленты псевдолитов и возможно другие. Термин "сигналы SPS", как используется в настоящем описании, предназначается, чтобы включать в себя SPS-подобные сигналы от псевдолитов или эквивалентов псевдолитов.
[0041] Как используется в настоящем описании, карманное мобильное устройство или мобильная станция (MS, МС) относится к устройству, которое время от времени может иметь позицию или местоположение, которое изменяется. Изменения в позиции и/или местоположении могут содержать изменения в направлении, расстоянии, ориентации и т.д., в качестве нескольких примеров. В конкретных примерах мобильной станцией может быть сотовый телефон, устройство беспроводной связи, пользовательское оборудование, ноутбук, устройство другой персональной системы связи (PCS) и/или другое переносное устройство связи. Мобильная станция может также содержать процессор и/или компьютерную платформу, адаптированную для выполнения функций, управляемых считываемыми машиной командами.
[0042] Настоящая заявка относится к следующим заявкам, одновременно поданным с этой заявкой и полностью включенным в настоящее описание: "Optimized Ordering of Assistance Data in Mobile Radio Network" Kirk Allan Burroughs (имеющее номер в реестре поверенного 072346); "Improve GPS Yield For Emergency Calls in a Mobile Radio Network" Томасом Rowland (имеющее номер в реестре поверенного 080114); и "Delayed Radio Resource Signaling in a Mobile Radio Network" Kirk Allan Burroughs (имеющее номер в реестре поверенного 080152).
[0043] ФИГ.1A, 1B и 1C показывают различные компоненты и интерфейсы в беспроводной сети. Для простоты описание ниже использует общую терминологию, используемую в беспроводных сетях, или конкретную терминологию, используемую с ссылкой на конкретный стандарт, хотя методики, описанные в настоящем описании, могут быть применимы к нескольким различным стандартам беспроводной сети. Например, такая беспроводная сеть включает в себя систему Множественного Доступа с Кодовым Разделением каналов (CDMA), которая является высокопроизводительной цифровой беспроводной технологией, которая велась и с коммерческой точки зрения разрабатывалась фирмой QUALCOMM Incorporated. Другая беспроводная сеть включает в себя Глобальную Систему Мобильной Связи (GSM), которая использовала альтернативную цифровую беспроводную технологию. Еще одна беспроводная сеть включает в себя Универсальную Систему Мобильной Связи (UMTS), которая является высокопроизводительной цифровой беспроводной технологией следующего поколения.
[0044] ФИГ.1A включает в себя мобильную станцию (МС 10), подсистему базовой станции (БС, BSS 20), включающую в себя базовую приемопередающую станцию (БППС, BTS 22) и контроллер базовых станций (КБС, BSC 24), центр коммутации мобильной связи (ЦКМС, MSC 30), коммутируемую телефонную сеть общего пользования (PSTN) и обслуживающий центр определения местоположения мобильной станции (SMLC). МС 10 является любым мобильным устройством беспроводной связи, таким как сотовый телефон, который имеет модем основной полосы частот для связи с одной или более базовыми станциями. Станции МС, на которые ссылаются в этом раскрытии, включают в себя приемник GPS или эквивалентный приемник для обеспечения возможности определения позиции. Термин GPS, используемый ниже, используется в универсальном смысле для обозначения спутниковой или псевдоспутниковой системы. МС 10 и BTS 22 связываются беспроводным образом по эфирному РЧ-интерфейсу, который называется интерфейс Um. Одна или более станций МС 10 могут связываться с BTS 22 или BSS 20 в одно время. Внутренним образом к BSS 20, BTS 22 может связываться с BSC 24 по интерфейсу Abis. Один BSC 24 может поддерживать несколько станций BTS 22 в развернутой сети. В настоящем описании, ссылаясь на сообщения эфирного интерфейса Um от сети (нисходящая линия связи) и от МС 10 (восходящая линия связи), эти сообщения могут упоминаться как передаваемые, используя BTS 22 или, эквивалентно, используя BSS 20. Интерфейс Lb соединяет BSC 24 с SMLC 50. Ссылаясь на сообщения нисходящей линии связи и восходящей линии связи интерфейса Lb, эти сообщения могут упоминаться как переданные, используя BSC 24 или, эквивалентно, используя BSS 20. Один или более контроллеров BSC 24 и/или станций BSS 20 могут подсоединяться к MSC 30, используя интерфейс А. MSC 30 соединяет коммутируемую линию от PSTN 40 к МС 10 для обеспечения голосового вызова сети общего пользования. Другие элементы сети или компоненты сети могут подсоединяться к BSS 20, MSC 30 и PSTN 40 для оказания других услуг.
[0045] Например, SMLC 50 может подсоединяться к сети для оказания услуг определения местоположения, и он показан связанным с BSC 24 по интерфейсу Lb. SMLC 50 может также соединяться с беспроводной сетью с помощью MSC 30 и интерфейса Lb. SMLC 50 обеспечивает общую координацию для определения местонахождения мобильных станций и может также вычислять конечное оцененное местоположение и оцененную достигнутую точность. SMLC 50 в целом используется в настоящем описании для обозначения сервера позиционирования, который также называется Объектом Определения Позиции (PDE) в сетях CDMA, Обслуживающем Мобильным Центром Определения местоположения (SMLC) в сетях GSM и Автономным (A-GPS) SMLC (SAS) в сотовых сетях связи WCDMA.
[0046] Сервер позиционирования - это системный ресурс (например, сервер), обычно находящийся в беспроводной сети, работающей вместе с одним или более опорными приемниками GPS, которые способны обмениваться связанной с GPS информацией с МС. В сеансе связи A-GPS с помощью МС сервер позиционирования посылает вспомогательные данные GPS на МС, чтобы улучшить процесс захвата сигнала. МС может возвращать измерения псевдодиапазона назад на сервер позиционирования, который затем способен вычислять позицию МС. Альтернативно, в сеансе связи A-GPS на основании МС, МС посылает вычисленные результаты позиции назад на сервер позиционирования.
[0047] ФИГ.1B показывает многоуровневую модель интерфейсов Um и Lb. Уровни в МС 10 (целевая МС) включают в себя начальный уровень, который называется физическим уровнем, уровень один или L1, второй уровень, который называется L2 (LAPDm), третий уровень, который называется уровнем радиоресурсов (RR), моделированный на основе спецификаций GSM 04.08, и наконец уровень приложения. В этом случае, уровень приложения - это Протокол Определения местоположения Радиоресурсов (RRLP), определенный в рекомендациях GSM 04.31 и GSM 04.35. BSS 20 (показана как BSC 24) имеет соответствующую многоуровневую модель, включающую в себя уровни L1, L2 (LAPD) и RR с сообщениями протокола RRLP, проходящими через BSS 20. BSS 20 передает нижние уровни, как требуется, на SMLC 50 по интерфейсу Lb. Уровни включают в себя уровни MTP, BSSLAP-LE и BSSLAP, которые соответствуют уровням MTP, SCCP BSSLAP-LE и BSSLAP в SMLC 50. Для дополнительной информации относительно BSSAP-LE и BSSLAP, смотри рекомендации GSM 09.21 и GSM 08.71.
[0048] Сообщения, передающиеся от элемента сети на элемент сети, могут передаваться через множественные различные интерфейсы и соответствующие протоколы. Например, сообщение, передающееся от SMLC 50 сервера позиционирования на BSS 20 для МС 10, будет передано в качестве первого сообщения через интерфейс Lb, возможно другое сообщение через интерфейс Abis и конечное сообщение через интерфейс Um. Обычно в настоящем раскрытии сообщение будет упомянуто посредством своего прикладного уровня и названием эфирного интерфейса для простоты. Например, запрос от SMLC 50 сервера позиционирования, предназначенный для МС 10, может быть упомянут посредством названия прикладного уровня эфирного интерфейса Um как запроса измерения позиции по протоколу RRLP. Дополнительно, для ясности, BSS 20 и SMLC 50 могут быть обобщено упомянуты как сеть 70, которая может включать в себя BTS 22, BSC 24 и SMLC 50 или может включать в себя BSS 20 и SMLC 50.
[0049] ФИГ.1C показывает схему последовательности сообщений нормального сеанса связи RRLP. В момент времени a SMLC 50 посылает сообщение 80 запроса на BSS 20 через интерфейс Lb. BSS 20 заново формирует пакеты и направляет этот запрос в качестве запроса 85 RRLP, передаваемого через эфирный интерфейс Um нисходящей линии связи на МС 10. Внутренним образом МС 10 начинает сеанс связи RRLP и в конечном счете отвечает через эфирный интерфейс Um восходящей линии связи сообщением 90 ответа по протоколу RRLP. BSS 20 снова формирует пакеты и направляет этот ответ на SMLC 50 в сообщении 95 ответа через интерфейс Lb, который SMLC 50 принимает как время b. В дальнейшем, такой запрос и ответы от и на SMLC 50 будут упоминаться, как запросы по протоколу RRLP и ответы по протоколу RRLP.
[0050] Прикладной уровень RRLP 3GPP в настоящее время поддерживает пять сообщений. Первое сообщение - это сообщение запроса измерения позиции по протоколу RRLP, используемое на нисходящей линии связи. Сеть 70 использует это сообщение для запроса измерений местоположения или оценки местоположения от МС 10. Это сообщение включает в себя команды для МС 10 и может также включать в себя вспомогательные данные для МС 10. Вспомогательные данные дополнительно описываются подробно ниже. Второе сообщение - это сообщение ответа измерения позиции по протоколу RRLP, используемое на восходящей линии связи, которое дополняет сообщение запроса измерения позиции по протоколу RRLP. МС 10 использует это сообщение для ответа сети 70 с информацией оценки позиции и другой, связанной с позицией информацией. Сообщение запроса измерения позиции по протоколу RRLP и сообщение ответа измерения позиции по протоколу RRLP работают совместно, чтобы начать и закончить сеанс связи RRLP.
[0051] Третье и четвертое сообщения также работают совместно, чтобы начать и закончить сеанс связи RRLP. Третье сообщение - это другое сообщение нисходящей линии связи, которое ссылается на сообщение вспомогательных данных RRLP, которое сеть 70 использует, чтобы послать вспомогательные данные на МС 10. Вспомогательные данные необязательно включают в себя опорную информацию BTS Улучшенной Наблюдаемой Разницы во времени (E-OTD) (например, информацию позиции и сигнализации BTS) и информацию измерения E-OTD для восьми дополнительных станций BTS. Четвертое сообщение - это сообщение Подтверждения (Ack) вспомогательных данных RRLP, используемое на восходящей линии связи. Сообщение подтверждения вспомогательных данных RRLP просто используется посредством МС 10 для подтверждения для сети 70 о приеме сообщения вспомогательных данных RRLP. Пятое сообщение - это необычное сообщение, которое называется Ошибкой Протокола RRLP, которое может быть использовано или на нисходящей линии связи, или на восходящей линии связи для сообщения об ошибке в протоколе.
[0052] ФИГ.2 показывает схему последовательности сообщений обычного процесса определения местоположения, используя сеансы связи RRLP. МС 10 и сеть 70 могут рассматриваться как модель взаимодействия "клиент - сервер" с МС 10, выступающей в роли клиента, и сетью 70, выступающей в роли сервера. Сеанс связи RRLP начинается с запроса от сети 70 и обычно заканчивается ответом от МС 10. В момент времени a процесс определения местоположения начинается сетью 70 и МС 10, обменивающимися сообщением 110 вспомогательных данных по протоколу RRLP. Таким образом, сеть 70 посылает сообщение 110 вспомогательных данных RRLP на МС 10, и МС 10 начинает новый сеанс связи RRLP после приема сообщения 110 вспомогательных данных RRLP. Обычно, как показано в момент времени b, МС 10 завершает сеанс связи RRLP ответом подтверждения, которое называется сообщением 112 подтверждения вспомогательных данных по протоколу RRLP.
[0053] В момент времени c сеть 70 посылает сообщение 120 запроса измерения позиции по протоколу RRLP, которое включает в себя команду позиции и, необязательно, вспомогательные данные. Команда позиции от сети 70 включает в себя максимальное время ответа (Ответ NW), установленное сетью (NW), и минимальную точность (Точность NW), также установленную сетью (NW). В ответ на прием сообщения 120 запроса измерения позиции по протоколу RRLP известная мобильная станция запускает свою подсистему GPS. В целом, GPS используется для ссылки на систему позиционирования, использующую спутниковые транспортные средства (средства SV) и/или псевдоспутники. В целом, подсистема также используется в качестве аппаратного обеспечения и/или программно-аппаратного обеспечения, и/или программного обеспечения, которое работает, чтобы обрабатывать данные. Затем МС 10 определяет одну или более привязок, где каждая имеет оценку неопределенности.
[0054] Как только оценка неопределенности меньше чем или равна минимальной точности сети (Точность NW), сообщенной сетью 70, или как только МС 10 вычислила привязку в течение времени пока разрешено параметром времени ответа сети (Ответом NW), обработка местоположения останавливается. Как показано в момент времени d, МС 10 сообщает о вычисленной привязке в сообщении 122 запроса измерения позиции по протоколу RRLP и также останавливает подсистему GPS. Разность во времени между временными ссылками c и d может быть существенной (например, от 45 секунд до нескольких минут). Одна задача в определении позиции состоит в сведении к минимуму этого времени захвата. Другая задача состоит в сокращении неопределенности в обеспеченной привязке.
[0055] ФИГ.3 показывает псевдосегментацию данных вспомогательных данных. Вспомогательные данные могут включать в себя данные позиционирования в отношении одного или более спутниковых транспортных средств (средствах SV). Поскольку вспомогательные данные обычно содержат информацию о 8-12 или более спутниках, вспомогательные данные разбиваются на множественные блоки псевдосегментированных сообщений вспомогательных данных, с каждым блоком, содержащим информацию об одном, двух, трех или четырех спутниках. В показанном примере вспомогательные данные сегментируются в три псевдосегмента. Первые два блока могут содержать информацию о трех или четырех спутниках, и конечный блок может содержать информацию об одном, двух или трех спутниках для, в общей сложности, семи-одиннадцати спутников для показанного примера.
[0056] Первый блок вспомогательных данных передается от сети 70 на МС 10 в момент времени а в первом сообщении 140 вспомогательных данных по протоколу RRLP. После приема начинается первый сеанс связи RRPL, но быстро заканчивается, когда МС 10 посылает сообщение 142 Подтверждения вспомогательных данных по протоколу RRLP в сеть 70 в момент времени b.
[0057] Второй блок вспомогательных данных передается от сети 70 на МС 10 в момент времени c во втором сообщении 144 вспомогательных данных по протоколу RRLP. После приема начинается второй сеанс связи RRPL. В этом примере в момент времени d, МС 10 не имеет времени, чтобы передавать сообщение подтверждения до того, как она примет второе сообщение RR (которое в настоящем описании называется дополнительным (экстра) сообщением 130 RR), которое заканчивает сеанс связи RRLP, созданный сообщением 144. Дополнительное сообщение RR может быть любым из нескольких различных сообщений RR. Например, сообщение RR с более высоким приоритетом, такое как сообщение передачи обслуживания, может быть передано на МС 10.
[0058] Сеанс связи называется прерванным, если либо МС 10 принимает часть сообщения RRLP нисходящей линии связи, либо никакое сообщение RRLP нисходящей линии связи. Прерывание происходит, когда сообщение помещается в исходящую очередь сети для передачи. В некоторых случаях, до того как сообщение RRLP нисходящей линии связи может быть полностью передано, остаток от сообщения, еще не переданного, удаляется из очереди для сообщения с более высоким приоритетом. В этих случаях МС 10 могла иметь принятую часть, но не все сообщение RRLP нисходящей линии связи. В других случаях сообщение RRLP нисходящей линии связи удаляется до того, как даже первый бит сообщения будет передан по эфирному интерфейсу. В этих случаях сеанс связи также считается прерванным, однако МС 10 не имеет сведений о существовании сеанса связи. Часто прерывание происходит, когда сообщение RRLP нисходящей линии связи является длинным или когда существуют более длинные сообщения перед ним (то есть существуют другие сообщения, запланированные для более раннего времени передачи) в той же самой очереди нисходящей линии связи.
[0059] С другой стороны, сеанс связи называется прекращенным, если МС 10 принимает все сообщение RRLP нисходящей линии связи, но полностью еще не послала ответ, такой как сообщение Подтверждения вспомогательных данных по протоколу RRLP. Прекращение обычно происходит, когда МС 10 занимает относительно длительный период времени, чтобы ответить на сообщение RRLP нисходящей линии связи.
[0060] Как в случае прерывания, так и в случае прекращения существующий сеанс связи в МС 10 и/или сети 70 заканчивается. Одна задача МС 10 состоит в том, чтобы быстро отвечать на сообщения RRLP нисходящей линии связи, таким образом сводя к минимуму прекращенные сеансы связи. Другая задача сети состоит в том, чтобы посылать более короткие сообщения RRLP нисходящей линии связи, таким образом сохраняя очередь менее заполненной и сводя к минимуму прерванные сеансы связи. Псевдосегментация решает вторую задачу, имея более короткие сообщения RRLP нисходящей линии связи, таким образом сокращая шанс прерванного сеанса связи, но не решает первую задачу быстрого ответа на сообщения нисходящей линии связи, как описано дополнительно ниже с обработкой, ассоциированной с сообщениями запроса измерения позиции по протоколу RRLP.
[0061] В дальнейшем, термины «прекращение», «прекращать» или «прекращенный» будут использованы со ссылкой на завершение сеанса связи, вызванного либо прекращением сеанса связи из-за приема дополнительного сообщения RR, либо прерыванием в очереди нисходящей линии связи посредством сообщения нисходящей линии связи с более высоким приоритетным.
[0062] Чтобы восстановиться из прекращенного сеанса связи, сеть 70 передает повторное сообщение. Повторное сообщение - это последующая передача сообщения, помещенного ранее в очередь нисходящей линии связи. В примере, показанном в момент времени e, второй блок вспомогательных данных включается в повторное сообщение 148 вспомогательных данных по протоколу RRLP, которое начинает третий сеанс связи RRLP в МС 10. МС 10 подтверждает прием с другим сообщением 150 Подтверждения вспомогательных данных по протоколу RRLP для сети 70 в момент времени f.
[0063] Конечный блок вспомогательных данных передается от сети 70 на МС 10 в момент времени g в сообщении 120 запроса измерения позиции по протоколу RRLP, которое принимается МС 10, и начинается дальнейший сеанс связи в этом примере. МС 10 теперь инструктируется, чтобы начать определение местоположения, которое может занять от 10 секунд до нескольких минут. В течение периода времени от приема команды до передачи ответа сеанс связи незащищен от прекращений сеанса связи посредством дополнительного сообщения RR. В этом примере конечный сеанс связи не прекращается, а вместо этого МС 10 отвечает сообщениями 122 ответа измерения позиции по протоколу RRLP в момент времени k.
[0064] ФИГ.4 и 5 иллюстрируют определение позиции остановки на основании МС 10, принимающей дополнительное сообщение RR. На ФИГ.4 в момент времени a сеть 70 посылает МС 10 сообщение 110 вспомогательных данных по протоколу RRLP, затем в момент времени b МС 10 отвечает сообщением 112 Подтверждения вспомогательных данных по протоколу RRLP. Сеть 70 и МС 10 может повторять этот обмен сообщениями несколько раз, чтобы обеспечить следующее вплоть до всех из вспомогательных данных для МС 10 до начала работы подсистемы GPS. В момент времени c сеть 70 посылает МС 10 сообщение 120 запроса измерения позиции с конечным блоком вспомогательных данных. В этот момент МС 10 запускает свою подсистему GPS и начинает определение местоположения.
[0065] В момент времени d сеть 70 посылает МС 10 дополнительное сообщение 130 RR (то есть сообщение, которое МС 10 не ожидала принять, так как находится в продолжающемся сеансе связи). Это дополнительное сообщение 130 RR, которое имело место до того, как МС 10 была в состоянии передавать сообщение-ответ, заставляет МС 10 прекратить текущий сеанс связи, начатый сообщением 120 запроса измерения позиции по протоколу RRLP. В качестве части прекращения сеанса связи МС 10 останавливает подсистему GPS, заканчивает процесс определения местоположения, отвечает на дополнительное сообщение 130 RR и ждет следующего запроса от сети 70. После короткой задержки Δt в момент времени e (где Δt = e - d), сеть 70 передает повторное сообщение 120A запроса измерения позиции по протоколу RRLP, которое заставляет МС 10 повторять запуск своей подсистемы GPS и заново начинать определение местоположения. Этот процесс посылки повторного сообщения 120A, сопровождаемого прерыванием посредством дополнительного сообщения 130 RR, может происходить несколько раз до того, как МС 10 будет в состоянии определить свою позицию в пределах времени ответа сети и обеспеченных параметров точности. В момент времени f МС 10 сообщает об определении позиции для сети 70 в сообщении 122 ответа измерения позиции по протоколу RRPL.
[0066] ФИГ.5 показывает этот обмен сообщениями в форме диаграммы состояний. Когда МС 10 принимает сообщение 120 запроса измерения позиции по протоколу RRLP, МС 10 входит в состояние 200, которое запускает подсистему GPS, и начинает определение позиции. В нормальной непрерываемой работе МС определяет позицию 220 и сообщает о позиции к сети посредством входа в состояние 230, которое посылает сообщение 122 ответа измерения позиции по протоколу RRPL. Когда местоположение не может быть определено в пределах предоставленного времени ответа сети (например, когда имеет место ожидание времени ответа), МС 10 может выйти из состояния 200 и войти в состояние 230, где МС 10 отвечает сообщением 122 ответа измерения позиции по протоколу RRPL, содержащим местоположение с точностью хуже, чем требуется сетью.
[0067] Диаграмма состояний показывает другие ситуации, которые могут иметь место. Например, МС 10 выйдет из состояния 200 и войдет в состояние 210, когда она будет принимать дополнительное сообщение 130 RR. В состоянии 210 МС 10 останавливает подсистему GPS и прерывает определение позиции. МС 10 выходит из состояния 210 и повторно входит в состояние 200, когда она принимает повторное сообщение 120A запроса измерения позиции по протоколу RRLP. В конечном счете МС 10 обычно или определяет позицию, или перерывает работу 220 и входит в состояние 230, чтобы ответить сообщением 122 ответа измерения позиции по протоколу RRPL.
[0068] В процессе определения местоположения, описанном выше, МС 10 ожидает сообщение 120 запроса измерения позиции по протоколу RRLP прежде, чем запустить свою подсистему GPS, и останавливает свою подсистему GPS, когда она принимает дополнительное сообщение 130 RR, таким образом сводя к минимуму продолжительность времени, когда подсистема GPS работает. При запуске подсистемы GPS в ответ на прием сообщения 120 запроса измерения позиции по протоколу RRLP МС 10 знает, что сеть 70 нуждается в привязке позиции. В любом другом случае нет гарантии, что сеть 70 будет запрашивать привязку позиции от МС 10. Поэтому, не начиная работу до этого времени, МС 10 экономит энергию батареи. МС 10 также экономит энергию батареи посредством остановки подсистемы GPS, как только сеанс связи RRLP заканчивается (например, в результате прекращения или сообщения о привязке позиции).
[0069] В соответствии с некоторыми вариантами осуществления настоящего изобретения, могут быть реализованы преимущества, не следуя этой известной процедуре, а вместо этого запуская подсистему GPS в ожидании приема сообщения 120 запроса измерения позиции по протоколу RRLP. Кроме того, могут быть реализованы преимущества, не останавливая подсистему GPS, как только сеанс связи RRLP закончен. За счет энергии батареи подсистема GPS может быть запущена рано (то есть прежде, чем сообщение 120 запроса измерения позиции по протоколу RRLP будет принято), и может продолжать процесс определения позиции, даже если сеанс связи RRLP заканчивается.
[0070] ФИГ.6 и 7 показывают события, которые запускают и останавливают подсистему GPS, в соответствии с вариантами осуществления настоящего изобретения. Диаграмма состояний на ФИГ.6 показывает два состояния: состояние 800, когда подсистема GPS не работает, и состояние 810, когда подсистема GPS запустилась, и процесс определения позиции начался. Могут иметь место несколько запускающих событий со стороны пользователя и со стороны сети, которые инициируют ранний запуск подсистемы GPS в ожидании будущего приема сообщения 120 запроса измерения позиции по протоколу RRLP. Запускающее событие происходит после начала выполнения операции. Таким образом, запускающее событие не просто включает мобильную станцию, что вводит мобильную станцию в работу. Некоторые устройства всегда запускают подсистему GPS, таким образом, не существует запускающего события, чтобы запустить подсистему GPS. Запускающее (инициирующее) событие не является операцией пользователя, чтобы специально включить функцию определения местоположения GPS мобильной станции. Запускающее событие - это событие, которое обычно не включает подсистему GPS. Кроме того, запускающее событие происходит до приема сообщения запроса измерения позиции по протоколу RRLP, которое является сообщением, которое обычно включает подсистему GPS.
[0071] Сначала на этапе 820, если МС 10 обнаруживает запускающее событие, что вызов Аварийных Служб (ES) был инициализирован, МС 10 может перейти из состояния 800 в состояние 810. Другой инициированный переход со стороны пользователя может произойти, если МС 10 приняла сообщение от приложения мобильной станции (MS App), указывающего, что необходима привязка позиции. События со стороны сети могут также инициировать переход от состояния 800 к состоянию 810. Например, на этапе 840, если МС 10 принимает запускающее событие нового сообщения вспомогательных данных по протоколу RRLP, МС 10 может перейти от состояния 800 в состояние 810. На этапе 850, если МС 10 принимает запускающее событие сообщения дополнительных платных услуг (VAS), МС 10 может перейти из состояния 800 в состояние 810. Для законченности, на этапе 860 известный процесс перехода в состояния показан посредством приема сообщения 120 запроса измерения позиции по протоколу RRLP.
[0072] Помимо раннего запуска, как описано с ссылкой на ФИГ.6, остановка подсистемы GPS может быть преимущественно отложена, как показано на ФИГ.7, что также включает в себя два состояния. В состоянии 900 работает подсистема GPS (например, из-за одного из событий, описанных выше). В состоянии 910 подсистема GPS останавливается. Несколько событий могут запускать переход от состояния 900 к состоянию 910, чтобы остановить подсистему GPS. Например, может быть получена позиция или может иметь место перерыв. На этапе 920 переход происходит в результате недавней посылки сообщения 122 ответа измерения позиции по протоколу RRPL, когда нет существенной необходимости для подсистемы в продолжении работы, такой как MS App, ожидающей лучшей привязки позиции. Переход может также происходить, когда приложению MS APP только что сообщили о привязке позиции, и МС 10 не ожидает сообщения 120 запроса измерения позиции по протоколу RRLP, и не ожидается, что она пошлет сообщение 122 ответа измерения позиции по протоколу RRPL.
[0073] Необычные случаи могут также вызывать переход. Например, на этапе 940, если МС 10 ожидала сообщение 120 запроса измерения позиции по протоколу RRLP (например, из-за событий 820 или 840, описанных выше), но не приняла сообщение в пределах заранее определенного периода времени (например, 45, 60 или 90 секунд или значения, выбранного из диапазона времен 30-60, 30-90, 30-120, 30-180, 30-240, 60-90, 60-120, 60-180, 60-240, 90-120, 90-180, 90-240, 120-180, 120-240 или подобного, как должно быть понятно специалистам в данной области техники), МС 10 может остановить свою подсистему GPS. Аналогично на этапе 940, если подсистема GPS работала слишком долго (например, 120 или 180 секунд), МС 10 может прервать или отключить подсистему GPS, чтобы сохранить энергию батареи.
[0074] ФИГ.8 показывает схему последовательности сообщений, выделяющую раннее определение местоположения, в соответствии с вариантами осуществления настоящего изобретения. Одна задача состоит в том, чтобы запустить подсистему GPS, как только МС 10 предполагает или ожидает будущее сообщение 120 запроса измерения позиции по протоколу RRLP от сети 70. В момент времени a МС 10 распознает набранные цифры для вызова аварийных служб (например, "911" в США, "112" в Европе или "119" в Японии). Как только вызов распознается как вызов аварийных служб, МС 10 может начинать определение местоположения посредством запуска своей подсистемы GSP, предполагая необходимость в привязке позиции МС 10.
[0075] В момент времени b сеть 70 посылает сообщение 110 вспомогательных данных по протоколу RRLP на МС 10. В ответ, в момент времени c МС 10 отвечает сообщением 112 Подтверждения вспомогательных данных по протоколу RRLP. Этот процесс посылки сообщений 110 и 112 может повторяться до тех пор, пока сеть 70 не передала достаточные вспомогательные данные. Наконец, в момент времени d сеть 70 посылает сообщение 120 запроса измерения позиции по протоколу RRLP на МС 10. МС 10 продолжает определять свое местоположение. Затем в момент времени e МС 10 отвечает сети 70 сообщением 122 ответа измерения позиции по протоколу RRLP, содержащим свою определенную позицию.
[0076] ФИГ. 9 и 10 иллюстрируют способ продолжения определения позиции после того, как дополнительное сообщение 130 RR принимается, в соответствии с вариантами осуществления настоящего изобретения. Другая задача состоит в том, чтобы продолжать управлять подсистемой GPS через незначительные необычные события. На ФИГ.9 дополнительное сообщение 130 RR прекращает сеанс текущего измерения, но МС 10 продолжает обработку определения местоположения и не прерывает свою подсистему GPS. В момент времени a МС 10 принимает сообщение 110 вспомогательных данных по протоколу RRLP от сети 70. В ответ в момент времени b МС 10 отвечает сообщением 112 Подтверждения вспомогательных данных по протоколу RRLP. Снова, этот процесс посылки сообщений 110 и 112 может повторяться до тех пор, пока сеть 70 не передала достаточное количество вспомогательных данных.
[0077] В момент времени c сеть 70 посылает сообщение 120 запроса измерения позиции по протоколу RRLP на МС 10. В этот момент уже работает подсистема GPS; на основании того, что МС 10 распознала или аварийный вызов или другое запускающее событие. В момент времени d прежде, чем сеть 70 принимает ответ, сеть 70 прерывает сеанс связи RRLP, начатый в момент времени c. Известные мобильные станции заканчивают сеанс связи RRLP и также останавливают подсистему GPS. В настоящем описании, МС 10 оставляет подсистему GPS непрерываемой, чтобы позволить ей продолжать процесс определения местоположения.
[0078] Наконец в момент времени e сеть 70 снова посылает сообщение 120A запроса измерения позиции по протоколу RRLP на МС 10 в повторном процессе. Снова, МС 10 не запускает заново подсистему GPS, а вместо этого продолжает процесс определения местоположения. Как указано выше, процессы прекращения и повторения могут повторяться. Затем, в момент времени f МС 10 отвечает сети 70 сообщением 122 ответа измерения позиции по протоколу RRLP, содержащим свою определенную позицию.
[0079] ФИГ.10 показывает диаграмму состояний. МС 10 входит в состояние 300, когда происходит запускающее событие. Запускающие события включают в себя прием сообщения 120 запроса измерения позиции по протоколу RRLP, прием сообщения 110 вспомогательных данных по протоколу RRLP 110, распознавание инициирования вызова аварийных служб и т.п. В состоянии 300 МС 10 продолжает определение позиции, если уже выполняется или начато определение позиции посредством запуска подсистемы GPS, если она уже не запущена.
[0080] Обычно, МС 10 выходит из состояния 300 или когда определяется позиция, или когда происходит перерыв (показанный в качестве перехода 310), и входит в состояние 320. Перерыв, например, может иметь место, когда МС 10 определяет, что сеть 70 предполагает измерение в пределах малого заранее определенного количества времени. В некоторых случаях МС 10 выходит из состояния 300 и входит в состояние 330, когда МС 10 принимает дополнительное сообщение 130 RR, которое прекращает текущий сеанс связи RRLP прежде, чем МС 10 сможет послать свой ответ.
[0081] В состоянии 330 МС 10 прекращает текущий сеанс связи RRLP, но продолжает определение позиции. После приема повторного сообщения 120A запроса измерения позиции по протоколу RRLP МС 10 входит в состояние 340, но снова продолжает процесс определения позиции. Как только МС 10 определяет позицию, или происходит перерыв (показанный в качестве перехода 340), МС 10 выходит из состояния 340 и входит в состояние 320. В состоянии 320 МС 10 посылает свое сообщение 320 ответа измерения позиции по протоколу RRLP на сеть 70.
[0082] ФИГ.11 и 12 иллюстрируют способ оптимального упорядочения загруженных Assistance Data (Вспомогательных Данных), в соответствии с вариантами осуществления настоящего изобретения. Вспомогательные данные могут быть переданы в одном или более (псевдосегментированном) сообщении 110 вспомогательных данных по протоколу RRLP 110 и/или в сообщении 120 запроса измерения позиции по протоколу RRLP. Оптимальное упорядочение передачи вспомогательных данных от сети 70 на МС 10 позволяет МС 10 преимущественно рано начать процесс определения позиции и активно использовать сегменты вспомогательных данных до инструктирования, чтобы сделать так посредством сообщения 120 запроса измерения позиции по протоколу RRLP.
[0083] ФИГ.11 показывает оптимальное упорядочение сегментированных вспомогательных данных 400. Первый сегмент включает в себя опорную информацию 410, включающую в себя спутниковое время и грубое местоположение МС 420. Первый и оставшиеся сегменты включают в себя информацию 430 позиции транспортного средства (включающую в себя данные альманаха и эфемерид). Информация 430 позиции транспортного средства упорядочивается от самых оптимальных 440 до следующих самых оптимальных 450, и продолжается до наименее оптимальных 460. Не все доступные спутники должны быть помещены в этот оптимально упорядоченный список вспомогательных данных.
[0084] Оптимальное упорядочение спутников может принимать во внимание один или более факторов для обеспечения МС 10 набором спутников, который наиболее вероятно будет видимым и полезным для МС 10 при быстром определении своего местоположения. Например, знание грубого местоположения МС может быть использовано для поиска позиций спутника, показанных эмпирически в качестве видимых для мобильных станций с аналогичными грубыми местоположениями МС. Сеть 70 может искать спутники, которые должны быть в области пространства, показанного наблюдением или экспериментальным путем, которые должны быть доступными для мобильной станции, имеющей аналогичное или одно то же грубое местоположение МС.
[0085] Кроме того, знание грубого местоположения МС может быть использовано для определения общей характеристики среды. Эта характеристика среды может быть использована для идентификации наилучших спутников, чтобы позволить МС 10 определять свое местоположение. Грубое местоположение МС может идентифицировать МС 10 как расположенную, например, в сельском ландшафте (например, в плоской сельской среде), в гористом ландшафте (например, расположенной на севере-юге долины или вдоль западной стороны горы), или в городском ландшафте (например, в плотно населенном центре города с высотными зданиями). Если грубое местоположение МС указывает, что МС 10 наиболее вероятно имеет свободный обзор неба, сеть 70 может сначала выдать информацию позиции спутника ортонормального или псевдоортонормального набора спутников, например трех спутников, близких к 45 градусам от горизонта, отделенных 120 градусами друг от друга. Любые два из этих трех спутников могут быть приблизительно ортогонально расположены относительно мобильной станции. Таким образом, первая линия между первым спутником до мобильной станции и вторая линия между вторым спутником до мобильной станции формируют прямой угол (ортонормальный) или угол между 60 и 120 градусами (приблизительно ортогонально расположенный). Если грубое местоположение МС предполагает, что МС 10 не была в состоянии видеть спутники, расположенные в конкретной области пространства (например, если гора преграждает небо с востока), тогда информация позиционирования для этих спутников может быть ниже в оптимальном списке спутников (или даже удаленной из списка полностью).
[0086] В дополнение к опорной информации 410, первый сегмент вспомогательных данных может также включать в себя информацию относительно одного или двух спутников, как обеспечено допустимой длиной сообщения. Первый сегмент включает в себя информацию позиции спутника, которая является самой оптимальной 440 для МС 10. Второй сегмент вспомогательных данных включает в себя информацию позиции спутника для следующих двух, трех или четырех самых оптимальных спутников 450. Каждый последующий сегмент вспомогательных данных включает в себя информацию позиции спутника для равных по оптимальности или все менее и менее оптимальных спутников, пока не достигается набор наименее оптимальных 460 спутников.
[0087] ФИГ.12 показывает последовательность операций для упорядочения и посылки сегментов вспомогательных данных. На этапе 500 сеть 70 упорядочивает список спутников от наиболее до наименее оптимального для МС 10, чтобы сформировать упорядоченный список, причем оба списка могут также быть сохранены в памяти в сети 70. Порядок может быть специфическим для каждой МС 10. Например, порядок может зависеть от грубого местоположения МС. На этапе 510 сеть 70 посылает первое сегментированное сообщение 110 вспомогательных данных по протоколу RRLP, включающее в себя опорную информацию (то есть опорную точку начала времени и грубое местоположение МС) и информацию позиции спутника для большинства оптимальных спутников.
[0088] На этапе 520 сеть 70, например, используя контроллер или логику контроллера в сети 70, определяет, наступило ли время посылать сообщение 120 запроса измерения позиции по протоколу RRLP. Сеть 70 может определять, что наступило время посылать сообщение 120 запроса измерения позиции по протоколу RRLP, если достаточные вспомогательные данные уже были посланы на МС 10. Если МС 10 имеет информацию позиции спутника для по меньшей мере заранее определенного числа спутников (например, 4-14 спутников), то сеть 70 может определять, что МС 10 имеет достаточное количество вспомогательных данных. Альтернативно, если заранее определенное число спутников не достигается, но никакая больше информация спутника не доступна, чтобы послать сообщение вспомогательных данных, сеть может или передавать сообщение запроса измерения позиции по протоколу RRLP (с или без конечной части вспомогательных данных), или может установить таймер таким образом, что сообщение запроса измерения позиции по протоколу RRLP посылается, чтобы принять сообщение ответа измерения позиции по протоколу RRLP вовремя. Альтернативно, сеть 70 может определить, что МС 10 имеет достаточное количество вспомогательных данных, если время, оставшееся до определения местоположения и необходимое сети 70, меньше, чем заранее определенное количество времени. В этом случае сеть 70 определяет, что наступает время посылать сообщение 120 запроса измерения позиции по протоколу RRLP, если произошел перерыв. Альтернативно, сеть 70 может определить, что наступило время посылать сообщение 120 запроса измерения позиции по протоколу RRLP, если все вспомогательные данные были ранее посланы.
[0089] Если не наступило время послать сообщение 120 запроса измерения позиции по протоколу RRLP, сеть 70 может перейти к этапу 530. Если наступило время послать сообщение 120 запроса измерения позиции по протоколу RRLP, сеть 70 может перейти к этапу 540. На этапе 530 сеть 70 посылает следующее сегментированное сообщение 110 вспомогательных данных по протоколу RRLP, включающее в себя информацию позиции для группы следующих наиболее оптимальных спутников, затем возвращается на этап 520. Этот цикл между этапами 520 и 530 может продолжаться многократно. На этапе 540 сеть 70 посылает сообщение 120 запроса измерения позиции по протоколу RRLP. Сообщение 120 запроса измерения позиции по протоколу RRLP может содержать конечный сегмент вспомогательных данных. Альтернативно, сообщение 120 запроса измерения позиции по протоколу RRLP может быть лишено любых вспомогательных данных, как описано подробно ниже.
[0090] ФИГ.13 и 14 показывают способ посылки своевременных запросов позиции в соответствии с вариантами осуществления настоящего изобретения.
[0091] На ФИГ.13 в момент времени a сеть 70 начинает сеанс связи RRLP посредством посылки сообщения RRLP, такого как сообщение 120 запроса измерения позиции по протоколу RRLP. Этот сценарий предполагает, что сеть 70 успешно послала одно или более сообщений 110 вспомогательных данных по протоколу RRLP на МС 10, или что МС 10 уже имеет вспомогательные данные в своей памяти. В показанном примере сеть 70 требует привязки позиции от МС 10 приблизительно через 35 секунд. В момент времени b сеанс связи по протоколу RRLP прекращается из-за некоторого другого сообщения 131 RR.
[0092] В некоторых случаях сообщение 120 RRLP, показанное в момент времени а, может все еще быть в исходящей очереди сети 70, таким образом МС 10 не приняла сообщение RRLP и не запустила сеанс связи RRLP. В этом случае, другое сообщение 131 RR прерывает сообщение 120 RRLP посредством удаления его из очереди прежде, чем оно сможет успешно и полностью быть передано из очереди. Из-за того, что МС 10 ранее приняла запускающее событие, такое как первое сообщение вспомогательных данных по протоколу RRLP (не показано), подсистема GPS уже работает. Во время каждого последующего сообщения подсистема GPS продолжает непрерывный процесс определения позиции.
[0093] Сеть 70 в момент времени c определяет, что остается только минимум времени до тех пор, пока будет необходима привязка позиции (например, остаются приблизительно 4 секунды). Сеть 70 посылает сообщение 120B запроса измерения позиции по протоколу RRLP на МС 10. Это сообщение 120B посылается в момент времени (время c) таким образом, что ответ будет принят как раз вовремя (в момент времени d). В некоторых вариантах осуществления сообщение 120B запроса измерения позиции по протоколу RRLP посылается со Временем Ответа NW и параметрами Точности NW, но без вспомогательных данных. Сообщение 120 запроса измерения позиции по протоколу RRLP может включать в себя короткий перерыв (например, Время Ответа NW представляет 2 или 4 секунды), в течение которого МС 10 должна возвратить привязку позиции и может содержать малое значение для неопределенности (Точность NW указывает высокую точность, например приблизительно 10 метров). Альтернативно, сообщение 120 запроса измерения позиции по протоколу RRLP может включать в себя набор параметров точности позиции, чтобы позволить большую неопределенность позиции (Точность NW указывает низкую точность, например приблизительно 250 метров). В момент времени d сеть 70 принимает сообщение 122 ответа измерения позиции по протоколу RRLP от МС 10 вовремя, когда остается приблизительно 0 секунд или около 0 секунд.
[0094] Эта своевременная процедура может быть вызвана, так как был необходим повтор из-за более раннего прерванного сеанса связи RRLP. В некоторых случаях прерванный сеанс связи RRLP должен быть сеансом связи, запущенным более ранним сообщением 120 запроса измерения позиции по протоколу RRLP (как показано). В некоторых случаях прерванный сеанс связи RRLP должен быть сеансом связи, запущенным сообщением 110 вспомогательных данных по протоколу RRLP. В некоторых случаях прерванный сеанс связи RRLP может быть сеансом связи, запущенным или более ранним сообщением 120 запроса измерения позиции по протоколу RRLP или сообщением 110 вспомогательных данных по протоколу RRLP.
[0095] ФИГ.14 показывает процесс в сети 70 для своевременных ответов и запросов позиции. На этапе 600 сеть 70 определяет будущий момент времени, когда необходимо сообщение 122 ответа измерения позиции по протоколу RRLP. На этапе 610 сеть 70 устанавливает таймер, план или подобное и ожидает, пока не будут необходимы данные местоположения (например, за 4 секунды до этого). В течение этого времени ожидания после последнего сообщения RRLP и перед своевременным сообщением 120 запроса измерения позиции по протоколу RRLP сеть может послать другие сообщения RR и не прерывать процесс определения позиции мобильной станции.
[0096] На этапе 620 сеть 70 посылает сообщение 120 запроса измерения позиции по протоколу RRLP. Это сообщение 120 посылается без вспомогательных данных в момент времени, дающий МС 10 достаточное количество времени для ответа. На этапе 630 сеть 70 принимает сообщение 122 ответа измерения позиции по протоколу RRLP непосредственно перед тем, как будет необходима позиция.
[0097] Как упомянуто выше, этот своевременный процесс может быть реализован для всех сообщений 120 запроса измерения позиции по протоколу RRLP, передаваемых Сетью 70. Ожидание, чтобы послать сообщение 120 запроса измерения позиции по протоколу RRLP до тех пор, пока не будет необходима привязка позиции (например, при преодолении повторов), помогает сокращать количество случаев прерванных сеансов связи и расширяет пропускную способность канала. Альтернативно, этот процесс может быть реализован, если одно или более прекращений и/или прерываний произошли в существующей связи с этой МС 10. Альтернативно, этот процесс может быть реализован, если одно или более прекращений или прерываний произошли в связи с другими мобильными станциями в этой ячейке, например, для мобильных станций, имеющих аналогичные грубые местоположения МС.
[0098] ФИГ.15 и 16 показывают способ задержки (или пропуска) новых RR, чтобы избежать прекращенных сеансов связи, в соответствии с вариантами осуществления настоящего изобретения.
[0099] ФИГ.15 показывает способ сведения к минимуму повторов между сетью 70 и МС 10 в беспроводной сети. В момент времени a сеть 10 посылает сообщение 100 запроса по протоколу RRLP, таким образом, открывая сеанс связи. Сообщение 100 Запроса RRLP может быть или сообщением 110 вспомогательных данных по протоколу RRLP, или сообщением 120 запроса измерения позиции по протоколу RRLP. В момент времени b прежде, чем сеть 10 приняла ответ от МС 10, сеть 70 определяет, в то время как сеанс связи по протоколу RRLP является все еще открытым, готово ли новое сообщение RR, чтобы быть посланным от сети 70 на МС 10. В известных системах сеть 70 немедленно посылает это новое сообщение RR, таким образом прекращая текущий сеанс связи RRLP. Согласно вариантам осуществления настоящего изобретения сеть 70 ожидает, если допустимо, чтобы послать новые сообщения RR, чтобы избежать того, чтобы текущий сеанс связи RRLP был прекращен. Таким образом, чтобы избежать прекращения сеанса связи RRLP, сеть 70 «удерживает» новое сообщение RR до тех пор, пока сообщение 102 Подтверждения/Ответа RRLP не будет принято, таким образом, заставляя сеанс связи RRLP закрываться обычным образом. На основании конкретного нового сообщения RR, сеть 70 может или ожидать, чтобы послать новое сообщение RR, или пропустить новое сообщение RR полностью. В момент времени c сеть 70 принимает и распознает сообщение 102 Подтверждения/Ответа по протоколу RRLP. Вскоре после этого, в момент времени d, если новое сообщение RR не было пропущено, сеть 70 посылает новое сообщение RR после того, как сеанс связи RRLP закрывается, таким образом, избегая прекращения сеанса связи RRLP.
[00100] На ФИГ.16 на этапе 650 сеть 70 посылает сообщение запроса по протоколу RRLP. На этапе 660 прежде, чем сеанс связи RRLP закрывается, сеть 70 определяет, что у нее есть новое сообщение RR, готовое для посылки на МС 10. На этапе 670 сеть 70 определяет, позволено ли задерживать (или пропускать) посылку нового сообщения RR. Если это не разрешено, сеть 70 посылает новое сообщение RR на этапе 690, таким образом, неизбежно прекращая текущий сеанс связи RRLP. На этапе 680 сеть 70 ожидает и затем принимает сообщение 102 Подтверждения/Ответа RRLP. Если новое сообщение RR было задержано, обработка продолжается на этапе 690 до завершения обработки. Если новое сообщение RR было пропущено (удалено), не существует нового сообщения RR для посылки, и обработка заканчивается.
[00101] ФИГ.17, 18, 19, 20 и 21 иллюстрируют способ изменения параметра точности, чтобы сбалансировать время ответа и точность при вызове аварийных служб (ES), в соответствии с вариантами осуществления настоящего изобретения.
[00102] ФИГ.17 показывает пример обработки потока вызовов для вызова аварийных служб (ES), чтобы использовать повышенную точность, когда время доступно. В момент времени а (t=0) МС 10 идентифицирует вызов ES. В ответ на идентификацию вызова ES МС 10 запускает подсистему GPS. МС 10 может устанавливать таймер активности в большее значение (например, Act_timer (таймер активности) = 40 секунд). Одна задача времени активности состоит в том, чтобы контролировать активность (или бездеятельность) сообщений между сетью 70 и МС 10. Если не будет активности в течение продолжительности времени, то таймер активности будет прерван и подсистема GPS будет остановлена.
[00103] В момент времени b сеть 70 посылает первое сообщение 149 вспомогательных данных по протоколу RRLP. Это первое сообщение 140 содержит опорную информацию 410 (время спутника и грубое местоположение 420 МС ФИГ.11). Оно также содержит информацию позиции путника для спутников, наиболее оптимальных для МС 10. В момент времени c МС 10 отвечает сообщением 142 Подтверждения вспомогательных данных по протоколу RRLP. В моменты времени d и e процесс передачи сообщений 144 вспомогательных данных и сообщений 146 подтверждения может повторяться один раз или более, чтобы послать дополнительные вспомогательные данные (информацию позиции спутника) для спутников, следующих наиболее оптимальных для МС 10.
[00104] Затем сеть 70 готовит сообщение 120 запроса измерения позиции по протоколу RRLP. Сообщение 120 запроса измерения позиции по протоколу RRLP может содержать значение для параметра времени ответа сети (Время Ответа NW). Этот параметр Времени Ответа NW может быть установлен, чтобы указывать промежуточное время ответа (например, значение 4 соответствует 16 секундам). Сообщение 120 может также содержать параметр точности сети (Точность NW). Этот параметр Точности NW может быть установлен, чтобы указывать промежуточную точность или неопределенность (например, значение 19 соответствует 51,2 метрам). Этот параметр и другие параметры расстояния или неопределенности, или диапазоны, описанные в настоящем описании с конкретными значениями, представлены только в качестве примеров. Могут быть использованы другие значения. Значение 51,2 метров или 245,5 метров, например, могут быть значениями в пределах от 40-60 метров, 30-70 метров, 40-100 метров, 40-400 метров, 100-150 метров, 100-250 метров, 100-300 метров, 100-400 метров и т.п., как понимает специалист в данной области техники.
[00105] В момент времени f сеть 70 посылает сообщение 120 запроса измерения позиции по протоколу RRLP. В некоторых случаях, последний набор вспомогательных данных включается в это сообщение 120. В других случаях последний набор вспомогательных данных включается в предыдущее сообщение, которое было сообщением 144 вспомогательных данных по протоколу RRLP.
[00106] Чтобы повысить точность, МС 10 может использовать значение точности, которое не представляет неопределенность, или предоставляет небольшую неопределенность. Например, параметр Act_Accuracy может быть установлен в значение 0, которое представляет 0 метров неопределенности (самое высокое значение точности). Альтернативно, параметр Act_Accuracy может быть установлен в значение 1, 2, 3 или 4, чтобы представить неопределенность 1,0, 2,1, 3,3 или 4,6 метров, соответственно. Другие значения, не представляющие неопределенности или предоставляющие небольшую неопределенность, могут также быть использованы.
[00107] В некоторых случаях, когда МС 10 управляет этим улучшенным процессом точности, МС 10 преимущественно устанавливает параметр Act_Accuracy независимо от параметра Точности NW, посланного сетью 70. В других случаях, когда сеть 70 управляет улучшенным процессом точности, сеть 70 преимущественно и временно отменяет свою стандартную точность сети (например, 51,2 м) и устанавливает параметр, который она позже пошлет в сообщении 120 запроса измерения позиции по протоколу RRLP, равным значению точности, которое не представляет неопределенность, или предоставляет небольшую неопределенность.
[00108] Также показано, после времени f МС 10 снова устанавливает таймер активности от текущего времени обратного отсчета (например, 20 секунд) в значение, которое соответствует времени ответа сети (Act_timer = Время ответа NW), например, если оставшееся время на текущем таймере активности меньше, чем обеспеченное сетью время ответа. Таким образом, МС 10 не будет преждевременно останавливать подсистему GPS прежде, чем привязка измерения позиции будет определена и передана на сеть 70. МС 10 может аналогично устанавливать второй таймер обратного отсчета равным времени ответа (Act_timer = Время ответа NW). Этот таймер может быть использован МС 10, чтобы устанавливать, когда МС 10 посылает определенную позицию.
[00109] В момент времени g время истечения в примере составляет 36 секунд. МС 10 использовала все распределенное время ответа сети при определении привязки позиции. Таким образом, даже при том, что точность позиции не была достигнута, позиция повышенной точности была найдена, потенциально имеющая большую точность (или аналогично, меньше неопределенности), чем требуемая стандартная точность сети (например, 51,2 м).
[00110] При понижении этого параметра неопределенности до 0 МС 10 будет использовать все допустимое время ответа сети при вычислении привязки позиции. Посредством понижения параметра неопределенности до низкого значения (например, 1, 2, 3, или 4) МС 10 будет наиболее вероятно использовать все допустимое время ответа сети до тех пор, пока привязка позиции не сможет быть определена с низкой оцененной неопределенностью. Дополнительное время, используемое подсистемой GPS в попытке получить привязку позиции с пониженной необходимой неопределенностью, предоставляет МС 10 возможность выполнить привязку позиции с повышенной точностью.
[00111] В момент времени g МС 10 посылает сообщение 122 ответа измерения позиции по протоколу RRLP с одним из следующих компонентов: информация местоположения; GSP-информация измерения; или ошибка местоположения. Обычно МС 10 будет отвечать компонентом информации местоположения, когда МС 10 определит приемлемую привязку позиции или перерыв. Альтернативно, МС 10 будет отвечать компонентом GSP-информация измерения, когда МС 10 будет проинструктирована обеспечить измерения для сети 70, что позволяет сети 70 определять позицию на основании этих необработанных данных.
[00112] ФИГ.18 показывает другой вариант осуществления обработки потока вызовов для вызова аварийных служб (ES). В этом сценарии сообщения запроса позиции передаются своевременно к МС 10, чтобы ответить своевременным ответом позиции. Поток операций начинается так, как описано выше со ссылкой на ФИГ.17. В момент времени а (t = 0) МС 10 идентифицирует вызов ES, затем в ответ запускает подсистему GPS. Снова устанавливается таймер обратного отсчета активности (Act_timer = 40 секунд). В момент времени b сеть 70 посылает первое сообщение 140 вспомогательных данных по протоколу RRLP. В момент времени c МС 10 отвечает сообщением 142 вспомогательных данных по протоколу RRLP. Процесс может продолжать передавать множественные наборы сообщений 140/142.
[00113] В момент времени d этот сценарий отступает от ранее описанного сценария. В момент времени d сеть 70 имеет информацию, что необходимо послать сообщение запроса позиции (сообщение 120 запроса измерения позиции по протоколу RRLP), однако сеть 70 ожидает, чтобы послать сообщение до заранее определенного времени до тех пор, пока сети 70 не будет необходима привязка позиции. Стандартная точность сети может быть установлена для обеспечения достаточной точности (Точность NW = 19, представляя 51,2 метра), однако время ответа, установленное сетью, значительно сокращается. Например, Время Ответа NW может быть установлено равным 2 (представляя 4 секунды) или равным 1 (представляя 2 секунды) вместо того, чтобы дать МС 10 десятки секунд. Это значительно сокращенное время обычно не позволяет мобильной станции определять привязку позиции. Обычно мобильной станции требуется от десятков секунд до нескольких минут. В настоящем описании, так как МС 10 начала процесс определения своей позиции рано (например, в момент времени a), она уже работала в отношении этой позиции в течение десятков секунд.
[00114] Снова сеть 70 готовит сообщение 120 запроса измерения позиции по протоколу RRLP. Сообщение 120 содержит значительно сокращенное время ответа сети (например, Время Ответа NW = 4 секунды) и точность сети (например, Точность NW = 51,2 метра). В момент времени e время истечения в этом примере составляет 32 секунды, и сеть 70 посылает сообщение 120 запроса измерения позиции по протоколу RRLP. В этом случае последний набор вспомогательных данных включается в предыдущее сообщение (то есть последнее сообщение 140 вспомогательных данных по протоколу RRLP), поэтому это сообщение 120 посылается без вспомогательных данных.
[00115] В некоторых случаях точность, используемая МС 10, устанавливается равной значению, представляющему низкую точность или эквивалент высокой неопределенности (например, значение 34 представляет 245,5 метра), которое может быть заранее определенным значением или заранее определенным конфигурируемым значением. Это значение точности, представляющее низкую точность, может быть установлено одним из двух способов: сетью 70; или МС 10.
[00116] Если значение точности устанавливается сетью 70, сеть 70 посылает сообщение 120 запроса измерения позиции по протоколу RRLP с точностью, установленной сетью, для представления этого низкого значения точности (Точность NW). Например, сеть 70 может временно перезаписывать стандартную точность сети низким значением точности для этой МС 10.
[00117] С другой стороны, если точность устанавливается МС 10, сеть 70 может посылать сообщение 120 запроса измерения позиции по протоколу RRLP с точностью, установленной сетью, для представления стандартной точности сети. МС 10 перезаписывает или игнорирует принятую точность сети и использует значение, представляющее низкую точность вместо этого. МС 10 использует время ответа сети (Время Ответа NW) как для своего внутреннего таймера обратного отсчета, так и для своего таймера времени ответа (то есть Act_timer = Время Ответа NW и Act_RT = Время Ответа NW, соответственно). В момент времени f, как только таймер времени ответа равен нулю (время истечения в примере составляет 36 секунд), МС 10 готовит и посылает сообщение 122 ответа измерения позиции по протоколу RRLP.
[00118] У этого сценария есть несколько преимуществ. Так как МС 10 рано запустила подсистему GPS (в момент времени a) и использовала максимальную возможную продолжительность времени при определении привязки позиции в то время сводя к минимуму потери энергии батареи, то она сформировала улучшенную привязку позиции. Так как сообщение 120 запроса измерения позиции по протоколу RRLP короткое (так как оно не содержит вспомогательных данных), вероятность, что сообщение 120 будет прервано, уменьшается. Так как время ответа сети низкое (например, 4 секунды), шанс конечного сеанса связи по протоколу RRLP, прекращаемого другими сообщениями RR, уменьшается. Если уменьшенное значение точности (например, Act_Accuracy = 245,5 метров) заменяется стандартной точностью сети (например, Точность NW = 51,2 метра), шанс конечного сеанса связи RRLP, прекращаемого другими сообщениями RR, уменьшается даже дополнительно.
[00119] ФИГ.19 показывает еще один вариант осуществления обработки потока вызовов для вызова аварийных служб (ES). В этом сценарии первое сообщение 120 запроса позиции (с или без вспомогательных данных) передается только после конечного сообщения 142 вспомогательных данных по протоколу RRLP. Если этот сеанс связи RRLP прерывается, сеть 70 задерживает посылку повторного сообщения 120A запроса позиции (сообщения без вспомогательных данных) до заранее определенного времени на основании того, когда позиция необходима. Иначе, события и поток сообщений от момента времени а до момента времени f являются идентичными тем, что описаны выше со ссылкой на ФИГ.17, и описание не будет повторяться.
[00120] Последовательность отличается от ФИГ.17, во времени g, где дополнительное сообщение 130 RR заставляет текущий сеанс связи RRLP прерываться. Эквивалентно, сообщение 120 запроса измерения позиции по протоколу RRLP может быть прервано внутренним образом в исходящей очереди сети (например, так как сообщение 120 запроса измерения позиции по протоколу RRLP давно содержит вспомогательные данные). В любом случае, МС 10 не имеет в настоящее время открытого сеанса связи RRLP или команды, чтобы ответить позицией.
[00121] Сеть 70 задерживает посылку повторного сообщения 120A до времени, вычисленного, чтобы дать МС 10 только достаточно времени для ответа привязкой позиции таким образом, что привязка позиции принимается вовремя для сети 70, чтобы сообщить об этом. На основании более раннего сеанса связи RRLP, прекращаемого или прерываемого, сеть 70 может определять - переключаться ли с первого состояния на второе состояние. В первом состоянии сеть 70 посылает повтор на основании преждевременно остановленного сеанса связи RRLP, и немедленно посылает повторное сообщение запроса позиции, как известно. Таким образом, сеть 70 основывает распределение времени следующего сообщения запроса позиции на прошлом событии, а именно на завершении дополнительного сообщения RR и необходимости снова посылать сообщение запроса позиции так быстро, насколько это возможно.
[00122] В этом втором состоянии сеть 70 не посылает немедленно повторное сообщение запроса позиции. Вместо этого сеть 70 преимущественно ожидает в течение продолжительности времени на основании того, когда необходим ответ позиции. Таким образом, вместо того чтобы основывать распределение времени повторного сообщения запроса позиции на прошлом событии, передача основывается на будущем событии. Например, распределение времени следующего запроса позиции основывается на том, когда необходима привязка позиции (на основании оставшегося Времени Ответа NW).
[00123] Распределение времени (тактирование) того, когда передается сообщение 120 запроса измерения позиции по протоколу RRLP, может быть основано на заранее определенном времени до того времени, как будет необходима привязка позиции в сети 70. В показанном примере заранее определенное время устанавливается равным 8 секундам (Время Ответа NW = 3) до того, как информация позиции будет необходима сети 70. Другие заранее определенные времена могут быть использованы, например, на основании эмпирических данных различных мобильных станций, могут быть использованы другие заранее определенные времена (например, Время Ответа NW может быть установлено равным 1, 2, 4, 8 или 16 секундам). Сеть 70 может устанавливать таймер или планировать сообщение запроса измерения так, чтобы сообщение было передано в это будущее время.
[00124] В момент времени h (t=32) сеть 70 заканчивает задержку и передает повторное сообщение 120A запроса измерения позиции по протоколу RRPL. Как обозначено, сообщение не содержит вспомогательных данных. Альтернативно, задержка при посылке повторного сообщения 120А вспомогательных данных по протоколу RRPL может быть немного укорочена, время ответа (Время ответа NW) может быть немного увеличено, и сообщение 120A может содержать некоторые вспомогательные данные. Кроме того, параметры точности, используемые МС 10, могут быть установлены равными большому значению неопределенности (например, 245,5 метрам) или посредством МС 10, перезаписывающей стандартное значение сети, или посредством сети 70 в качестве временного значения неопределенности. МС 10 заново устанавливает свой таймер активности для обеспеченного сетью времени ответа (Act_timer = Время Ответа NW).
[00125] В этом примере таймер активности мобильного абонента был установлен, чтобы истечь через 4 секунды (Act_timer = 4 секунды), но этот таймер заново устанавливался на основании принятого времени (изменение Act_timer = Время Ответа NW = 8 секунд). МС 10 может устанавливать свое время ответа для обеспеченного сетью времени ответа (Act_RT = Время Ответа NW = 8 секунд). В момент времени i (t=36) МС 10 сообщает об определенной позиции сообщением 122 ответа измерения позиции по протоколу RRLP, затем останавливает подсистему GPS.
[00126] ФИГ.20 показывает сценарий, где сеть 70 вовремя передает сообщение запроса измерения, но более раннее повторное сообщение вспомогательных данных заставляет МС 10 использовать обеспеченную сетью точность. События и сообщения во времена а-d идентичны событиям ФИГ.19. В момент времени e сеанс связи прекращается экстра сообщением 144 RR. Аналогично сеть может прервать передачу сообщений 144. Во времена f и g вспомогательные данные посылаются в качестве повторного сообщения 144A вспомогательные данные по протоколу RRLP и подтверждаются сообщением 146 Подтверждения вспомогательных данных по протоколу RRLP. Повторное сообщение может быть повторным первым сообщением вспомогательных данных (не показано), вторым сообщением вспомогательных данных (как показано) или любым другим из сегментированной последовательности сообщений вспомогательных данных (не показаны).
[00127] В момент времени h (t=20) сеть 70 посылает сообщение 120 запроса измерения позиции по протоколу RRLP для своевременного приема сообщения отчета об измерении, как описано выше. МС 10 может устанавливать свой таймер активности равным обеспеченному сетью времени ответа (Act_timer = Время Ответа NW = 16 секунд), может устанавливать свой таймер ответа равным обеспеченному сетью времени ответа (Act_RT = Время Ответа NW = 16 секунд) и может устанавливать свою точность равной обеспеченной сетью точности (Act_Accuracy = Точность NW = 51,2 метра).
[00128] В предыдущих примерах МС 10 обычно использует значение точности, которое является временным значением. Это временное значение является отличным значением, которое или больше, или меньше, чем стандартная точность сети. В этом примере стандартная точность сети, как правило, является исключением для использования отличного значения. Наконец, в момент времени i (t = 36) МС 10 сообщает определенное измерение в сообщениях 122 ответа измерения позиции по протоколу RRLP.
[00129] В некоторых случаях сеть 70 может обнаруживать случай повтора (из-за прекращения или прерывания). В этом случае сеть 70 модифицирует обеспеченную сетью точность от временного значения на стандартной точности сети. Альтернативно, МС 10 может обнаруживать случай повторного сообщения вспомогательных данных (из-за прекращения) и на основании этого события МС модифицирует свою точность из этого значения. Альтернативно, МС может определять, что принятое сообщение запроса измерения задерживается на основании измеренной продолжительности времени от предыдущего сообщения по протоколу RRLP.
[00130] ФИГ.21 показывает последовательность операций, относящихся к модификации параметра точности от стандартной точности сети, как описано с ссылкой на предыдущие четыре чертежа. На этапе 700 после того, как МС 10 приняла сообщение 120 запроса измерения позиции по протоколу RRLP, выполняется определение, было ли послано сообщение 120 и принято ли вовремя. Это определение может быть сделано МС 10 или сетью 70 на основании времени (например, некоторого ожидаемого времени передачи) на основании прекращений или на основании прерываний, как описано выше. Если сообщение 120 запроса измерения позиции по протоколу RRLP передается вовремя, обработка продолжается на этапе 710.
[00131] На этапе 710 МС 10 использует более высокую, чем обычно, точность (например, 0 метров) для максимальной точности, или выбранное маленькое значение меньшее, чем стандартная точность сети (например, значение между 1 и 10 метрами, или значение между 0 метрами и стандартным значением точности сети) для более точного ответа.
[00132] Если сообщение 120 запроса измерения позиции по протоколу RRLP задерживается, точность может быть установлена равной стандартной точности сети (не показана). Альтернативно, если сообщение 120 запроса измерения позиции по протоколу RRLP задерживается, обработка продолжается на этапе 720. Другой тест может быть выполнен на этапе 720, чтобы определить, задерживается ли сообщение 120 немного или очень сильно. Например, сообщение 120 запроса измерения позиции по протоколу RRLP может быть определено как немного задержанное, если был сделан повтор сообщения вспомогательных данных. Сообщение 120 запроса измерения позиции по протоколу RRLP может быть определено как сильно задержанное, если был повтор предыдущего сообщения запроса измерения позиции по протоколу RRLP. Альтернативно, сообщение 120 запроса измерения позиции по протоколу RRLP может быть определено как немного задержанное, если оно передается позже, чем первое заранее определенное время (например, 24 секунды), но до второго заранее определенного времени (например, 36 секунд). Сообщение 120 запроса измерения позиции по протоколу RRLP может быть определено как сильно задержанное, если оно передается позже, чем второе заранее определенное время. На этапе 730 МС 10 использует стандартную точность сети (то есть Точность NW). На этапе 740 МС 10 использует более низкое значение точности (например, 100, 200 или 250 метров), чтобы ускорить свой ответ позиции.
[00133] ФИГ.22 показывает схему последовательности операций сообщения для дополнительной платной услуги (VAS) в соответствии с вариантами осуществления настоящего изобретения. Для VAS МС 10 не должна использовать полное Время Ответа NW.
[00134] В момент времени а (t=0) сеть 70 определяет, что VAS была инициирована. В ответ она посылает сообщение 140 вспомогательных данных по протоколу RRLP. МС 10 после приема сообщения 140 вспомогательных данных по протоколу RRLP, запускает свою подсистему GPS и устанавливает свой таймер активности равным заранее определенному значению (большему значению, чем используется в случае вызова ES, например Act_timer = 45 секунд). Кроме того, в ответ на прием сообщения 140 вспомогательных данных по протоколу RRLP МС 10 посылает в момент времени b сообщение 142 Подтверждения вспомогательных данных по протоколу RRLP. Во времена c и d дополнительные сегменты вспомогательных данных могут быть переданы и подтверждены дополнительными парами сообщений 144 вспомогательных данных по протоколу RRLP и сообщениями 146 подтверждения вспомогательных данных по протоколу RRLP.
[00135] В момент времени e (t = 20, Act_timer = 25), сеть 70 готовит сообщение запроса измерения позиции по протоколу RRLP со стандартным временем сети (например, Время Ответа NW = 16 секунд) и стандартным значением точности сети (например, Точность NW = 51,2 метра). Сеть 70 посылает, и МС 10 принимает сообщение 120 запроса измерения позиции по протоколу RRLP. В отличие от вызова ES, МС 10 не отвергает обеспеченные сетью параметры. МС 10 устанавливает свой таймер активности, активный таймер ответа и параметры точности активности равными обеспеченным сетью значениям (то есть Act_timer = Время Ответа NW, Act_RT = Время Ответа NW и Act_Accuracy = Точность NW, соответственно).
[00136] В момент времени f (t = 34, Act_timer = 2) МС 10 посылает свою определенную позицию в сообщении 122 ответа измерения позиции по протоколу RRLP в сеть 70. В этом случае МС послала определенную привязку перед истечением времени ответа сети из-за неопределенности позиции, являющейся меньше, чем необходимая точность сети. Наконец, в ответ на сообщение об определенной привязке МС 10 останавливает подсистему GPS.
[00137] Должно быть понятно, что изобретение может быть осуществлено с модификациями и изменениями в пределах сущности и объема приложенной формулы изобретения. Описание не предназначается, чтобы быть исчерпывающим или ограничивать изобретение точной раскрытой формой. Должно быть понятно, что изобретение может быть осуществлено с модификациями и изменениями.
Реферат
Изобретение в целом относится к системам связи и, более конкретно, к улучшению определения местоположения, используя глобальную спутниковую навигационную систему. Технический результат заключается в обеспечении повышения точности, в то же время не влияя на скорость захвата или конечное время захвата при получении привязки позиции мобильной станции. Для этого способ оценки местоположения мобильной станции в беспроводной сети, выполняемый в мобильной станции, содержит этапы: инициирование подсистемы определения местоположения в ответ на запускающее событие; прием сообщения запроса измерения позиции, содержащего точность сети и время ответа сети, при этом сообщение запроса измерения позиции принимают вслед за инициированием подсистемы определения местоположения; определение оценки местоположения мобильной станции с помощью подсистемы определения местоположения; формирование сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, причем сообщение ответа содержит оценку местоположения; передача сообщения ответа измерения позиции. 8 н. и 46 з.п. ф-лы, 24 ил.
Формула
инициирование подсистемы определения местоположения в ответ на запускающее событие,
прием сообщения запроса измерения позиции, содержащего точность сети и время ответа сети, при этом сообщение запроса измерения позиции принимают вслед за инициированием подсистемы определения местоположения;
определение оценки местоположения мобильной станции с помощью подсистемы определения местоположения;
формирование сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, причем сообщение ответа измерения позиции содержит оценку местоположения;
передачу сообщения ответа измерения позиции.
выбор точности между точностью сети и временной точностью, отличной от точности сети, причем точность выбирают на основании, по меньшей мере частично, определения сообщения повтора, переданного к мобильной станции;
передачу сообщения запроса измерения позиции, содержащего выбранную точность и время ответа сети; и
прием сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, причем сообщение ответа измерения позиции содержит оценку местоположения.
подсистему определения местоположения для оценки местоположения мобильной станции, причем подсистема определения местоположения инициируется в ответ на запускающее событие,
приемник для приема сообщения запроса измерения позиции, содержащего точность сети и время ответа сети, при этом сообщение запроса измерения позиции принимается вслед за инициированием подсистемы определения местоположения;
логику для формирования сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, причем сообщение ответа измерения позиции содержит оценку местоположения;
передатчик для передачи сообщения ответа измерения позиции.
логику для выбора точности между точностью сети и временной точностью, отличной от точности сети, причем точность выбирают на основании, по меньшей мере частично, определения сообщения повтора, переданного к мобильной станции;
передатчик для передачи сообщения запроса измерения позиции, содержащего выбранную точность и время ответа сети; и
приемник для приема сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, причем сообщение ответа измерения позиции содержит оценку местоположения.
средство для инициирования подсистемы определения местоположения, ассоциированной с таймером активности, в течение длительности времени в ответ на запускающее событие,
средство для приема сообщения запроса измерения позиции, содержащего точность сети и время ответа сети, причем сообщение запроса измерения позиции принимают вслед за инициированием подсистемы определения местоположения;
средство для оценки местоположения мобильной станции с помощью подсистемы определения местоположения;
средство для формирования сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, причем сообщение ответа измерения позиции содержит оценку местоположения;
средство для передачи сообщения ответа измерения позиции.
средство для выбора точности между точностью сети и временной точностью, отличной от точности сети, при этом точность выбирается на основании, по меньшей мере частично, определения сообщения повтора, переданного к мобильной станции;
средство для передачи сообщения запроса измерения позиции, содержащего выбранную точность и время ответа сети; и
средство для приема сообщения ответа измерения позиции в ответ на сообщение запроса измерения позиции, причем сообщение ответа измерения позиции содержит оценку местоположения.
инициируют подсистему определения местоположения в ответ на запускающее событие;
обрабатывают принятое сообщение запроса измерения позиции, содержащее точность сети и время ответа сети, при этом сообщение запроса измерения позиции принимают вслед за инициированием подсистемы определения местоположения;
оценивают местоположение мобильной станции с помощью подсистемы определения местоположения;
формируют сообщение ответа измерения позиции в ответ на сообщение запроса измерения позиции, причем сообщение ответа измерения позиции содержит оценку местоположения;
инициируют передачу сообщения ответа измерения позиции.
выбирают точность между точностью сети и временной точностью, отличной от точности сети, причем точность выбирают на основании, по меньшей мере частично, определения сообщения повтора, переданного к мобильной станции;
инициируют передачу сообщения запроса измерения позиции, содержащего выбранную точность и время ответа сети; и
обрабатывают принятое сообщение ответа измерения позиции в ответ на сообщение запроса измерения позиции, причем сообщение ответа измерения позиции содержит оценку местоположения.
Документы, цитированные в отчёте о поиске
Приемник глобальной системы позиционирования с ограниченным пространством поиска кодового сдвига для сотовой телефонной системы
Комментарии