Задержанная сигнализация радиоресурсов в мобильной радиосети - RU2461994C2
Код документа: RU2461994C2
Чертежи


















Описание
Перекрестная ссылка на родственные заявки
Данная заявка согласно 35 U.S.C. §119(e) испрашивает приоритет: предварительной заявки на патент (США) 60/971453, озаглавленной "GSM Control Plane Positioning Preemption RRLP Implementation for MS and SMLC", поданной 11 сентября 2007 года (адвокатская выписка 072346P1); и предварительной заявки на патент (США) 61/012039, озаглавленной "GSM Control Plane Positioning Preemption RRLP Implementation for MS and SMLC", поданной 6 декабря 2007 года (номер в реестре поверенного 072346P2), раскрытия сущности которых в явной форме полностью содержатся по ссылке в данном документе.
Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к системам связи, а более конкретно - к улучшению определения местоположения с помощью глобальной навигационной спутниковой системы.
Уровень техники
Зачастую желательно и иногда необходимо знать местоположение мобильной станции (например, сотового телефона). Термины "местоположение" и "положение" синонимичны и используются взаимозаменяемо в данном документе. Например, пользователь может использовать мобильную станцию (MS) для того, чтобы просматривать веб-узел, и может выбирать чувствительное к местоположению содержимое. Местоположение мобильной станции затем может быть определено и использовано для того, чтобы предоставлять соответствующее содержимое пользователю. Имеется много других сценариев, в которых знание местоположения мобильной станции полезно или необходимо. Например, предписание 911 FCC требует, чтобы операторы связи предоставляли усовершенствованные услуги 911, в том числе определение географического местоположения мобильной станции, выполняющей вызов служб экстренной помощи 911. Мобильная станция может инициализироваться так, что она может получать услуги определения местоположения из собственной сети также в ходе роуминга в гостевой сети. Мобильная станция может осуществлять связь с различными сетевыми объектами в собственной сети, чтобы определять местоположение мобильной станции каждый раз, когда необходимо.
Предусмотрено множество различных типов технологий, используемых при вычислении местоположения мобильных станций в беспроводных сетях с различными уровнями успеха и точности. Способы на основе сети включают в себя угол прихода (AOA) с использованием, по меньшей мере, двух вышек, разность времен прихода сигналов (TDOA) с использованием мультилатерации и подпись местоположения с использованием снятия "RF-отпечатков пальцев" для сопоставления с RF шаблонами, которые мобильные станции демонстрируют в известных местоположениях. Различные способы на основе мобильной станции включают GPS, усовершенствованную трилатерацию по прямой линии связи (A-FLT), отчет по временному опережению/измерениям в сети (TA/NMR) и/или усовершенствованную отслеживаемую разность времен (E-OTD).
Другой способ на основе мобильной станции заключается в технологии с использованием GPS (A-GPS), в которой сервер предоставляет вспомогательные данные в мобильную станцию, чтобы она имела малое время до первого местоопределения (TTFF), чтобы позволить сбор слабого сигнала и оптимизировать использование питания аккумулятора мобильной станции. A-GPS используется в качестве технологии определения местоположения изолированно или совместно с другими технологиями определения местоположения, которые предоставляют измерения дальности. A-GPS-сервер предоставляет в беспроводную мобильную станцию данные, которые являются характерными для приблизительного местоположения мобильной станции. Вспомогательные данные помогают мобильной станции быстро захватывать спутники и потенциально предоставляют возможность телефонному аппарату захватывать слабые сигналы. Мобильная станция затем выполняет вычисление местоположения или необязательно возвращает измеренные сдвиги кода на сервер, чтобы выполнять вычисление. A-GPS может применять дополнительную информацию, такую как измерения времени полного приема, от сотовой базовой станции в мобильную станцию, чтобы вычислить местоположение, где в противном случае это может быть невозможным, например, когда видимыми является недостаточное число GPS-спутников.
Прогресс в технологиях спутниковой глобальной системы определения местоположения (GPS), временного опережения (TA) и наземного определения местоположения на основе усовершенствованной отслеживаемой разности во времени (E-OTD) предоставляет точное определение географического местоположения (к примеру, широты и долготы) абонента мобильной станции. Поскольку услуги определения географического местоположения развертываются в сетях беспроводной связи, такая информация местоположения может быть сохранена в сетевых элементах и доставлена в узлы сети с помощью сообщений сигнализирования. Такая информация может храниться в обслуживающем центре определения местоположения мобильного терминала (SMLC), автономном SMLC (SAS), объекте определения местоположения (PDE), защищенной платформе определения местоположения в пользовательской плоскости (SLP) и специальных базах данных местоположения мобильных абонентов.
Одним примером специализированной базы данных местоположения мобильных абонентов является SMLC, предлагаемая посредством партнерского проекта третьего поколения (3GPP). В частности, 3GPP точно определил протокол сигнализации для сообщения местоположения мобильных абонентов в и из SMLC. Этот протокол сигнализации упоминается в данном документе как протокол LCS (услуг определения местоположения) на основе радиоресурсов, обозначенный как RRLP, и точно определяет сигнализацию, сообщаемую между мобильной станцией и SMLC, относящиеся к местоположению мобильного абонента. Подробное описание протокола RRLP см. в 3GPP TS 44.031 v7.2.0 (2008-11) 3rd Generation Partnership Project; Technical Specification Group GSM Edge Radio Access Network; Location Services (LCS); Mobile Station (MS) - Serving Mobile Location Center (SMLC) Radio Resource LCS Protocol (RRLP) (редакция 7).
В дополнение к глобальной системе определения местоположения (GPS) Соединенных Штатов другие спутниковые системы определения местоположения (SPS), такие как российская система GLONASS или предложенная европейская система Galileo, также могут использоваться для определения местоположения мобильной станции. Тем не менее, каждая из этих систем работает согласно различным спецификациям.
Одним недостатком спутниковой системы определения местоположения является время, которое тратится на то, чтобы обнаруживать точное местоположение. Как правило, точность местоположения увязывается со скоростью обнаружения и наоборот. Таким образом, более точное определение местоположения занимает больше времени. Соответственно, имеется потребность в системе связи, включающей в себя глобальную навигационную спутниковую систему (GNSS), которая может определять местоположение для мобильной станции на основе спутниковых сигналов, отправляемых от двух или более спутников, чтобы предоставлять дополнительную эффективность и преимущества для определения местоположения, в том числе повышенную точность. Существует потребность в том, чтобы повышать точность при одновременном отсутствии негативного влияния на скорость обнаружения или общее время обнаружения при обнаружении местоположения мобильной станции, например, во время вызова служб экстренной помощи (ES) или сеанса услуг добавленного значения (VAS).
Сущность изобретения
Некоторые варианты осуществления настоящего изобретения предусматривают способ уменьшения числа повторных сообщений запроса на измерение местоположения между сетью и мобильной станцией в беспроводной сети, при этом способ содержит: передачу сообщения вспомогательных данных RRLP; прием сообщения подтверждения приема вспомогательных данных RRLP; ожидание до предварительно определенного времени, при этом предварительно определенное время основано на времени, когда необходимы данные о местоположении; передачу, в предварительно определенное время, сообщения запроса на измерение местоположения по протоколу RRLP, содержащего время отклика сети и точность сети, при этом время отклика сети содержит значение, представляющее сокращенное время отклика не более 4 секунд, при этом точность сети содержит значение, представляющее низкую точность не менее 100 метров, и при этом сообщение запроса на измерение местоположения по протоколу RRLP не содержит вспомогательных данных; и прием, во время до того как данные местоположения требуются, сообщения ответа по измерению местоположения по протоколу RRLP, содержащего данные о местоположении.
Некоторые варианты осуществления настоящего изобретения предусматривают сеть для уменьшения числа повторных сообщений запроса на измерение местоположения между сетью и мобильной станцией в беспроводной сети, при этом способ содержит: таймер, чтобы ожидать до предварительно определенного времени, при этом предварительно определенное время основано на времени, когда необходимы данные о местоположении; передающее устройство, чтобы передавать, в предварительно определенное время, сообщение запроса на измерение местоположения, содержащее время отклика сети и точность сети; приемное устройство, чтобы принимать, во время до того как данные о местоположении необходимы, сообщение ответа по измерению местоположения, содержащее данные о местоположении. Сеть, в которой время отклика сети содержит значение, представляющее сокращенное время отклика не более 4 секунд. Сеть, в которой точность сети содержит значение, представляющее низкую точность не менее 100 метров. Сеть, в которой запрос на измерение местоположения не содержит вспомогательных данных. Сеть, в которой сообщение запроса на измерение местоположения содержит сообщение запроса на измерение местоположения по протоколу RRLP. Сеть, в которой сообщение ответа по измерению местоположения содержит сообщение ответа по измерению местоположения по протоколу RRLP.
Некоторые варианты осуществления настоящего изобретения предусматривают машиночитаемый продукт, содержащий машиночитаемый носитель, содержащий: код, чтобы заставить, по меньшей мере, один компьютер ожидать до предварительно определенного времени, при этом предварительно определенное время основано на времени, когда необходимы данные о местоположении; код, чтобы заставить, по меньшей мере, один компьютер передавать в предварительно определенное время сообщение запроса на измерение местоположения, содержащее время отклика сети и точность сети; код, чтобы заставить, по меньшей мере, один компьютер принимать, во время до того как данные о местоположении необходимы, сообщение ответа по измерению местоположения, содержащее данные о местоположении. Машиночитаемый продукт, в котором время отклика сети содержит значение, представляющее сокращенное время отклика не более 4 секунд. Машиночитаемый продукт, в котором точность сети содержит значение, представляющее низкую точность не менее 100 метров. Машиночитаемый продукт, в котором запрос на измерение местоположения не содержит вспомогательных данных. Машиночитаемый продукт, в котором машиночитаемый носитель дополнительно содержит: код, чтобы заставить, по меньшей мере, один компьютер передавать сообщение вспомогательных данных; и код, чтобы заставить, по меньшей мере, один компьютер принимать сообщение подтверждения приема вспомогательных данных. Машиночитаемый продукт, в котором сообщение запроса на измерение местоположения содержит сообщение запроса на измерение местоположения по протоколу RRLP. Машиночитаемый продукт, в котором сообщение ответа по измерению местоположения содержит сообщение ответа по измерению местоположения по протоколу RRLP.
Некоторые варианты осуществления настоящего изобретения предусматривают способ в сети для минимизации повторных запросов между сетью и мобильной станцией в беспроводной сети, при этом способ содержит: отправку сообщения запроса, тем самым открывая сеанс в мобильной станции; определение, в то время когда сеанс является открытым, того, что RR-сообщение готово к отправке в мобильную станцию; уклонение от прекращения сеанса с RR-сообщением; прием сообщения ответа, тем самым закрывая сеанс. Способ, в котором этап уклонения от прекращения сеанса содержит: ожидание, чтобы отправить RR-сообщение; и отправку RR-сообщения после того как сеанс закрыт. Способ, в котором этап уклонения от прекращения сеанса содержит отбрасывание RR-сообщения. Способ, в котором сообщение запроса содержит сообщение запроса на измерение местоположения по протоколу RRLP. Способ, в котором сообщение запроса содержит сообщение вспомогательных данных RRLP.
Некоторые варианты осуществления настоящего изобретения предусматривают сеть для минимизации повторных запросов между сетью и мобильной станцией в беспроводной сети, при этом сеть содержит: средство для отправки сообщения запроса, тем самым открывая сеанс в мобильной станции; средство для определения, в то время когда сеанс является открытым, того, что RR-сообщение готово к отправке в мобильную станцию; средство для уклонения от прекращения сеанса с RR-сообщением; средство для приема сообщения ответа, тем самым закрывая сеанс. Способ, в котором средство для уклонения от прекращения сеанса содержит: средство для ожидания, чтобы отправить RR-сообщение; средство для отправки RR-сообщения после того как сеанс закрыт. Способ, в котором средство для уклонения от прекращения сеанса содержит отбрасывание RR-сообщения. Способ, в котором сообщение запроса содержит сообщение запроса на измерение местоположения по протоколу RRLP. Способ, в котором сообщение запроса содержит сообщение вспомогательных данных RRLP.
Некоторые варианты осуществления настоящего изобретения предусматривают сеть для минимизации повторных запросов между сетью и мобильной станцией в беспроводной сети, при этом сеть содержит: передающее устройство, чтобы отправлять сообщение запроса, тем самым открывая сеанс в мобильной станции; логический блок, чтобы определять, в то время когда сеанс является открытым, то, что RR-сообщение готово к отправке в мобильную станцию; логический блок, чтобы уклоняться от прекращения сеанса с RR-сообщением; приемное устройство, чтобы принимать сообщение ответа, тем самым закрывая сеанс. Сеть, в которой логический блок, чтобы уклоняться от прекращения сеанса, содержит: таймер, чтобы ожидать, чтобы отправить RR-сообщение; при этом передающее устройство дополнительно должно отправлять RR-сообщение после того как сеанс закрыт. Сеть, в которой логический блок, чтобы уклоняться от прекращения сеанса, содержит логический блок, чтобы отбрасывать RR-сообщение. Способ, в котором сообщение запроса содержит сообщение запроса на измерение местоположения по протоколу RRLP. Способ, в котором сообщение запроса содержит сообщение вспомогательных данных RRLP.
Некоторые варианты осуществления настоящего изобретения предусматривают машиночитаемый продукт, содержащий машиночитаемый носитель, содержащий: код, чтобы заставить, по меньшей мере, один компьютер отправлять сообщение запроса, тем самым открывая сеанс в мобильной станции; код, чтобы заставить, по меньшей мере, один компьютеру определять, в то время когда сеанс является открытым, то, что RR-сообщение готово к отправке в мобильную станцию; код, чтобы заставить, по меньшей мере, один компьютер уклоняться от прекращения сеанса из-за RR-сообщения; код, чтобы заставить, по меньшей мере, один компьютер принимать сообщение ответа, тем самым закрывая сеанс. Способ, в котором код, чтобы заставить, по меньшей мере, один компьютер уклоняться от прекращения сеанса содержит: код, чтобы заставить, по меньшей мере, один компьютер ожидать, чтобы отправить RR-сообщение; код, чтобы заставить, по меньшей мере, один компьютер отправлять RR-сообщение после того как сеанс закрыт. Способ, в котором код, чтобы заставить, по меньшей мере, один компьютер уклоняться от прекращения сеанса содержит код, чтобы заставить, по меньшей мере, один компьютер отбрасывать RR-сообщение. Способ, в котором сообщение запроса содержит сообщение запроса на измерение местоположения по протоколу RRLP. Способ, в котором сообщение запроса содержит сообщение вспомогательных данных RRLP.
Эти и другие аспекты, признаки и преимущества изобретения должны стать очевидными при обращении к вариантам осуществления, описанным ниже.
Краткое описание чертежей
Варианты осуществления изобретения описаны далее только в качестве примера со ссылкой на чертежи.
Фиг. 1A, 1B и 1C показывают различные компоненты и интерфейсы в беспроводной сети.
Фиг. 2 показывает блок-схему последовательности сообщений типичного процесса определения местоположения с использованием RRLP-сеансов.
Фиг. 3 показывает псевдосегментацию вспомогательных данных.
Фиг. 4 и 5 иллюстрируют остановку определения местоположения на основе MS, принимающей дополнительное RR-сообщение.
Фиг. 6 и 7 показывают события, которые запускают и выключают GPS-механизм, в соответствии с вариантами осуществления настоящего изобретения.
Фиг. 8 показывает блок-схему последовательности сообщений, иллюстрирующую раннее определение местоположения, в соответствии с вариантами осуществления настоящего изобретения.
Фиг. 9 и 10 иллюстрируют способ продолжения определения местоположения после того как дополнительное RR-сообщение принято, в соответствии с вариантами осуществления настоящего изобретения.
Фиг. 11 и 12 иллюстрируют способ оптимального упорядочения загруженных вспомогательных данных в соответствии с вариантами осуществления настоящего изобретения.
Фиг. 13 и 14 показывают способ отправки своевременных запросов местоположения в соответствии с вариантами осуществления настоящего изобретения.
Фиг. 15 и 16 показывают способ задержки (или отбрасывания) новых RR-сообщений, чтобы уклоняться от прекращенных сеансов, в соответствии с вариантами осуществления настоящего изобретения.
Фиг. 17, 18, 19, 20 и 21 иллюстрируют способ изменения параметра точности, чтобы балансировать время отклика и точность при вызове служб экстренной помощи (ES) в соответствии с вариантами осуществления настоящего изобретения.
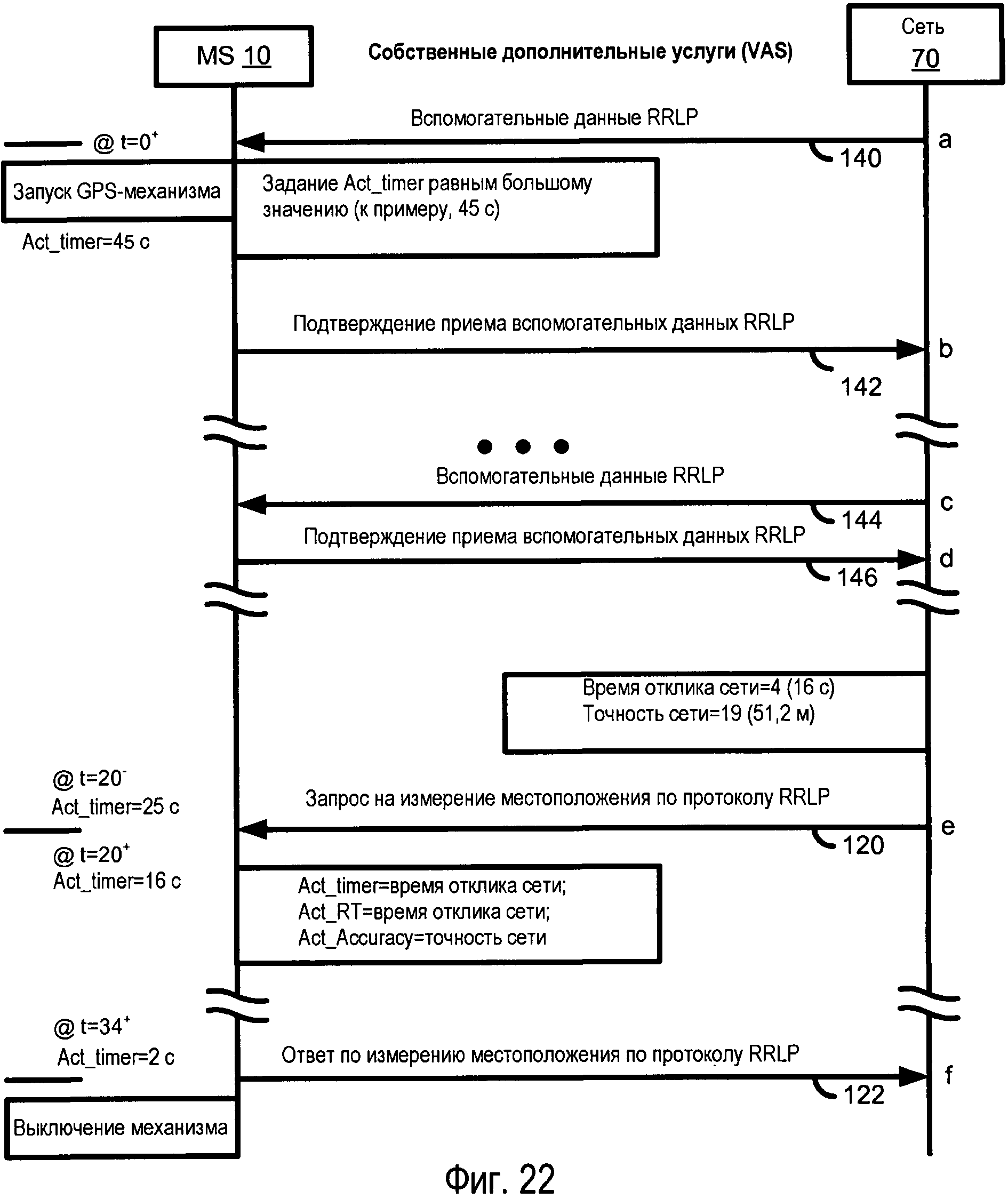
Фиг. 22 показывает блок-схему последовательности сообщений для собственной дополнительной услуги (VAS) в соответствии с вариантами осуществления настоящего изобретения.
Подробное описание изобретения
В последующем описании выполняется ссылка на прилагаемые чертежи, которые иллюстрируют несколько вариантов осуществления настоящего изобретения. Следует понимать, что другие варианты осуществления могут быть использованы, и механические, композиционные, структурные, электрические и функциональные изменения могут быть осуществлены без отступления от сущности и объема настоящего раскрытия. Нижеследующее подробное описание не должно рассматриваться в ограничивающем смысле. Кроме того, некоторые части нижеприведенного подробного описания представляются с точки зрения процедур, этапов, логических блоков, обработки и других символьных представлений операций с информационными битами, которые могут выполняться в электронных схемах или в компьютерном запоминающем устройстве.
Процедура, машиноисполняемый этап, логический блок, процесс и т.д. предполагаются здесь как самосогласованная последовательность этапов или инструкций, приводящая к желаемому результату. Этапы - это то, что использует физическую обработку физических величин. Эти величины могут принимать форму электрических, магнитных или радиосигналов, допускающих сохранение, перенос, комбинирование, сравнение и иную обработку в электронных схемах или в компьютерной системе. Эти сигналы по контексту могут упоминаться как биты, значения, элементы, символы, знаки, термины, числа и т.п. Каждый этап может выполняться посредством аппаратных средств, программного обеспечения, микропрограммного обеспечения или комбинаций вышеозначенного. При реализации в аппаратных средствах блоки обработки могут быть реализованы в одной или нескольких специализированных интегральных схемах (ASIC), процессорах цифровых сигналов (DSP), устройствах обработки цифровых сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных устройствах, предназначенных для того, чтобы выполнять описанные в данном документе функции, и/или в комбинациях вышеозначенного.
По всему данному подробному описанию могут выполняться ссылки на "один пример", "один признак", "пример" или "признак", и они означают, что конкретный признак, структура или характеристика, описанная в связи с признаком и/или примером, включена, по меньшей мере, в один признак и/или пример заявленного предмета изобретения. Таким образом, появления фразы "в одном примере", "пример", "в одном признаке" или "признак" в различных местах по всему данному подробному описанию не обязательно все ссылаются на один и тот же признак и/или пример. Кроме того, конкретные признаки, структуры или характеристики могут быть комбинированы в одном или более примеров и/или признаков.
"Инструкции", упоминаемые в данном документе, относятся к выражениям, которые представляют одну или более логических операций. Например, инструкции могут быть "машиночитаемыми" посредством интерпретации посредством машины для выполнения одной или более операций для одного или более объектов данных. Тем не менее, это просто пример инструкций, и заявленный предмет изобретения не ограничен в этом отношении. В другом примере инструкции, упоминаемые в данном документе, могут относиться к кодированным командам, которые являются исполняемыми посредством схемы обработки, имеющей набор команд, который включает в себя кодированные команды. Такая инструкция может быть кодирована в форме машинного языка, понятного для схемы обработки. К тому же, это просто примеры инструкций и заявленный предмет изобретения не ограничен в этом отношении.
"Носитель хранения данных", упоминаемый в данном документе, относится к физическим носителям, допускающим хранение выражений, которые воспринимаются посредством одной или более машин. Например, носитель хранения данных может содержать одно или более устройств хранения для хранения машиночитаемых инструкций и/или информации. Эти устройства хранения могут содержать любой из нескольких типов носителей, включающих в себя, например, магнитные, оптические или полупроводниковые носители хранения данных. Эти запоминающие устройства также могут содержать любой тип долговременных, кратковременных, энергозависимых или энергонезависимых запоминающих устройств. Тем не менее, это просто примеры носителей хранения данных, и заявленный предмет изобретения не ограничен в этом отношении. Термин "носитель хранения данных" неприменим к вакууму.
Если прямо не указано иное, как очевидно из нижеследующего пояснения, следует принимать во внимание, что в данном подробном описании пояснения, использующие такие термины как "обработка", "вычисление", "расчет", "выбор", "формирование", "предоставление", "запрещение", "определение местоположения", "завершение", "идентификация", "инициализация", "обнаружение", "получение", "предоставление в качестве хоста", "хранение", "представление", "оценка", "прием", "передача", "определение" и/или т.п., упоминаются как действия и/или процессы, которые могут быть выполнены посредством вычислительной платформы, такой как компьютер или аналогичное электронное вычислительное устройство, которое обрабатывает и/или преобразует данные, представленные как физические электронные и/или магнитные величины и/или другие физические величины, в процессорах, запоминающих устройствах, регистрах и/или других устройствах хранения информации, передачи, приема и/или отображения вычислительной платформы. Эти действия и/или процессы могут быть выполнены посредством вычислительной платформы под управлением машиночитаемых инструкций, сохраненных, например, в носителе хранения данных. Эти машиночитаемые инструкции могут содержать, например, программное обеспечение или микропрограммное обеспечение, сохраненное в носителе хранения данных, включенном как часть вычислительной платформы (к примеру, включенном как часть схемы обработки или внешнем к такой схеме обработки). Дополнительно, если явно не указано иное, процессы, описанные в данном документе в отношении блок-схем последовательности операций или иных элементов, также могут выполняться и/или управляться, полностью или частично, посредством этой вычислительной платформы.
Технологии беспроводной связи, описанные в данном документе, могут использоваться в связи с различными сетями беспроводной связи, такими как беспроводная глобальная вычислительная сеть (WWAN), беспроводная локальная вычислительная сеть (WLAN), беспроводная персональная вычислительная сеть (WPAN) и т.д. Термины "сеть" и "система" могут быть использованы взаимозаменяемо в данном документе. WWAN может быть сетью с множественным доступом с кодовым разделением каналов (CDMA), сетью с множественным доступом с временным разделением каналов (TDMA), сетью с множественным доступом с частотным разделением каналов (FDMA), сетью с ортогональным множественным доступом с частотным разделением каналов (OFDMA), сетью с множественным доступом с частотным разделением каналов на одной несущей (SC-FDMA) сеть и т.д. CDMA-сеть может реализовывать одну или более технологий радиосвязи, например, cdma2000, широкополосный CDMA (W-CDMA) и т.д., помимо прочих технологий радиосвязи. Здесь cdma2000 может включать в себя технологии, реализованные согласно стандартам IS-95, IS-2000 и IS-856. TDMA-сеть может реализовывать глобальную систему мобильной связи (GSM), цифровую усовершенствованную систему мобильной телефонной связи (D-AMPS) или какую-либо другую RAT. GSM и W-CDMA описываются в документах от консорциума с названием партнерский проект третьего поколения (3GPP). Cdma2000 описывается в документах от консорциума с названием партнерский проект третьего поколения 2 (3GPP2). Документы 3GPP и 3GPP2 являются общедоступными. WLAN, например, может содержать сети IEEE 802.11x, а WPAN может содержать Bluetooth-сеть, IEEE 802.15x. Реализации беспроводной связи, описанные в данном документе, также могут использоваться в связи с любой комбинацией WWAN, WLAN и/или WPAN.
Устройство и/или система могут оценивать местоположение устройства, по меньшей мере, частично на основе сигналов, принимаемых от спутников. В частности такое устройство и/или система могут получать измерения "псевдодальности", содержащие приближения расстояний между ассоциированными спутниками и навигационным спутниковым приемным устройством. В конкретном примере, такая псевдодальность может быть определена в приемном устройстве, которое допускает обработку сигналов из одного или более спутников как часть спутниковой системы определения местоположения (SPS). Эта SPS может содержать, например, систему глобального позиционирования (GPS), Galileo, Glonass, помимо прочего, или любую SPS, разработанную в будущем. Чтобы определять свое местоположение, спутниковое навигационное приемное устройство может получать измерения псевдодальности до трех или более спутников, а также свои местоположения во время передачи. Зная орбитальные параметры спутников, эти местоположения могут быть вычислены для любого момента времени. Измерение псевдодальности затем может быть определено, по меньшей мере, частично на основе времени, в течение которого сигнал проходит из спутника в приемное устройство, умноженного на скорость света. Хотя технологии, описанные в данном документе, могут быть предоставлены как реализации определения местоположения в GPS типах Galileo для SPS и/или в качестве конкретных иллюстраций, следует понимать, что эти технологии также могут применяться к другим типам SPS и что заявленный предмет изобретения не ограничен в этом отношении.
Технологии, описанные в данном документе, могут использоваться с любой из нескольких SPS, в том числе, к примеру, вышеупомянутой SPS. Кроме того, такие технологии могут использоваться в системах определения местоположения, которые используют псевдоспутники или комбинацию спутников и псевдоспутников. Псевдоспутники могут содержать наземные передающие устройства, которые передают в широковещательном режиме код псевдослучайного шума (PRN) или другой код измерения дальности (к примеру, подобный сотовому сигналу GPS или CDMA), модулированный на несущем сигнале L-полосы (или другой частоты), который может быть синхронизирован с GPS-временем. Такому передающему устройству может быть назначен уникальный PRN-код, чтобы разрешать идентификацию посредством удаленного приемного устройства. Псевдоспутники используются в случаях, когда SPS-сигналы из орбитального спутника могут быть недоступны, например, в туннелях, шахтах, зданиях, городских каньонах или других закрытых участках. Другая реализация псевдоспутников известна как радиомаяки. Термин "спутник", при использовании в данном документе, имеет намерение включать в себя псевдоспутники, эквиваленты псевдоспутников и возможно другие элементы. Термин "сигналы SPS", при использовании в данном документе, имеет намерение включать в себя SPS-подобные сигналы от псевдоспутников или эквивалентов псевдоспутников.
При использовании в данном документе, карманное мобильное устройство или мобильная станция (MS) означают устройство, которое может время от времени изменять положение или местоположение. Изменения положения и/или местоположения могут содержать изменения направления, расстояния, ориентации и т.д. в качестве некоторых примеров. В конкретных примерах мобильная станция может содержать сотовый телефон, устройство беспроводной связи, абонентское устройство, портативный компьютер, другое устройство по стандарту персональной системы связи (PCS) и/или другое портативное устройство связи. Мобильная станция также может содержать процессор и/или вычислительную платформу, выполненную с возможностью осуществлять функции, управляемые посредством машиночитаемых инструкций.
Данная заявка относится к следующими заявками, каждая из которых подана одновременно с этой заявкой и каждая из которых полностью содержится в данном документе: "Optimized Ordering of Assistance Data in the Mobile Radio Network" автора Kirk Allan Burroughs (адвокатская выписка 072346); "Improve GPS Yield For Emergency Calls in the Mobile Radio Network" автора Thomas Rowland (адвокатская выписка 080114); и "Dynamic Measure Position Request Processing in the Mobile Radio Network" автора Thomas Rowland (адвокатская выписка 080116).
Фиг. 1A, 1B и 1C показывают различные компоненты и интерфейсы в беспроводной сети. Для простоты нижеприведенное описание использует общую терминологию, используемую в беспроводных сетях, или конкретную терминологию, используемую в отношении конкретного стандарта, хотя технологии, описанные в данном документе, могут быть применимыми к нескольким различным стандартам беспроводной сети. Например, такая беспроводная сеть включает в себя систему множественного доступа с кодовым разделением каналов (CDMA), которая является цифровой беспроводной технологией с высокой пропускной способностью, которая создана и разработана с коммерческими целями компанией QUALCOMM Incorporated. Другая беспроводная сеть включает в себя глобальную систему мобильной связи (GSM), которая использует альтернативную цифровую беспроводную технологию. Еще одна беспроводная сеть включает в себя универсальную систему мобильной связи (UMTS), которая является цифровой беспроводной технологией с высокой пропускной способностью следующего поколения.
Фиг. 1A включает в себя мобильную станцию (MS 10), подсистему базовой станции (BSS 20), включающую в себя базовую приемо-передающую станцию (BTS 22) и контроллер базовой станции (BSC 24), центр коммутации мобильной связи (MSC 30), коммутируемую телефонную сеть общего пользования (PSTN) и обслуживающий центр определения местоположения мобильного терминала (SMLC). MS 10 является любым устройством мобильной беспроводной связи, таким как сотовый телефон, который имеет модем для передачи в полосе модулирующих частот для обмена данными с одной или более базовых станций. MS, которые упоминаются в этом раскрытии, включают в себя приемное устройство GPS или эквивалентное приемное устройство, чтобы предоставлять возможности определения местоположения. Термин "GPS", используемый ниже, используется в общем смысле для того, чтобы означать спутниковую или псевдоспутниковую систему. MS 10 и BTS 22 осуществляют связь в беспроводном режиме по RF-радиоинтерфейсу, называемому Um-интерфейсом. Одна или более MS 10 могут осуществлять связь с BTS 22 или BSS 20 одновременно. Внутренне для BSS 20, BTS 22 может выполнять передачу в BSC 24 по Abis-интерфейсу. Один BSC 24 может поддерживать несколько BTS 22 в развертываемой сети. В данном документе при ссылке на сообщение Um-радиоинтерфейса от сети (нисходящая линия связи) и от MS 10 (восходящая линия связи), эти сообщения могут упоминаться как передаваемые с помощью BTS 22 или, эквивалентно, с помощью BSS 20. Lb-интерфейс присоединяет BSC 24 с SMLC 50. При ссылке на сообщение нисходящей и восходящей линии связи Lb-интерфейса эти сообщения могут упоминаться как передаваемые с помощью BSC 24 или, эквивалентно, с помощью BSS 20. Один или более BSC 24 и/или BSS 20 могут быть присоединены к MSC 30 с помощью A-интерфейса. MSC 30 соединяет коммутируемую линию из PSTN 40 с MS 10, чтобы предоставлять речевой вызов по сети общего пользования. Другие элементы сети или компоненты сети могут быть подключены к BSS 20, MSC 30 и PSTN 40, чтобы предоставлять другие услуги.
Например, SMLC 50 может быть присоединен к сети, чтобы предоставлять услуги определения местоположения, и показан подключенным к BSC 24 по Lb-интерфейсу. SMLC 50 также может быть подключен к беспроводной сети через MSC 30 и Ls-интерфейс. SMLC 50 предоставляет полную координацию для нахождения мобильных станций и также может вычислять конечное оцененное местоположение и оцененную достигаемую точность. SMLC 50 используется, в общем, в данном документе для того, чтобы означать сервер определения местоположения, который также упоминается как объект определения местоположения (PDE) в рамках CDMA-сетей, обслуживающий центр определения местоположения мобильного терминала (SMLC) в рамках GSM-сетей и автономный (A-GPS) SMLC (SAS) в рамках сотовых сетей WCDMA.
Сервер определения местоположения - это системный ресурс (например, сервер), типично в рамках беспроводной сети, работающий вместе с одним или более приемных устройств опорных GPS-сигналов, который допускает обмен связанной с GPS информацией с MS. В A-GPS-сеансе с использованием MS сервер определения местоположения отправляет вспомогательные данные GPS в MS, чтобы улучшать процесс обнаружения сигнала. MS может возвращать измерения псевдодальности обратно серверу определения местоположения, который затем допускает вычисление местоположения MS. Альтернативно, в основанном на MS сеансе A-GPS, MS отправляет вычисленные результаты местоположения обратно на сервер определения местоположения.
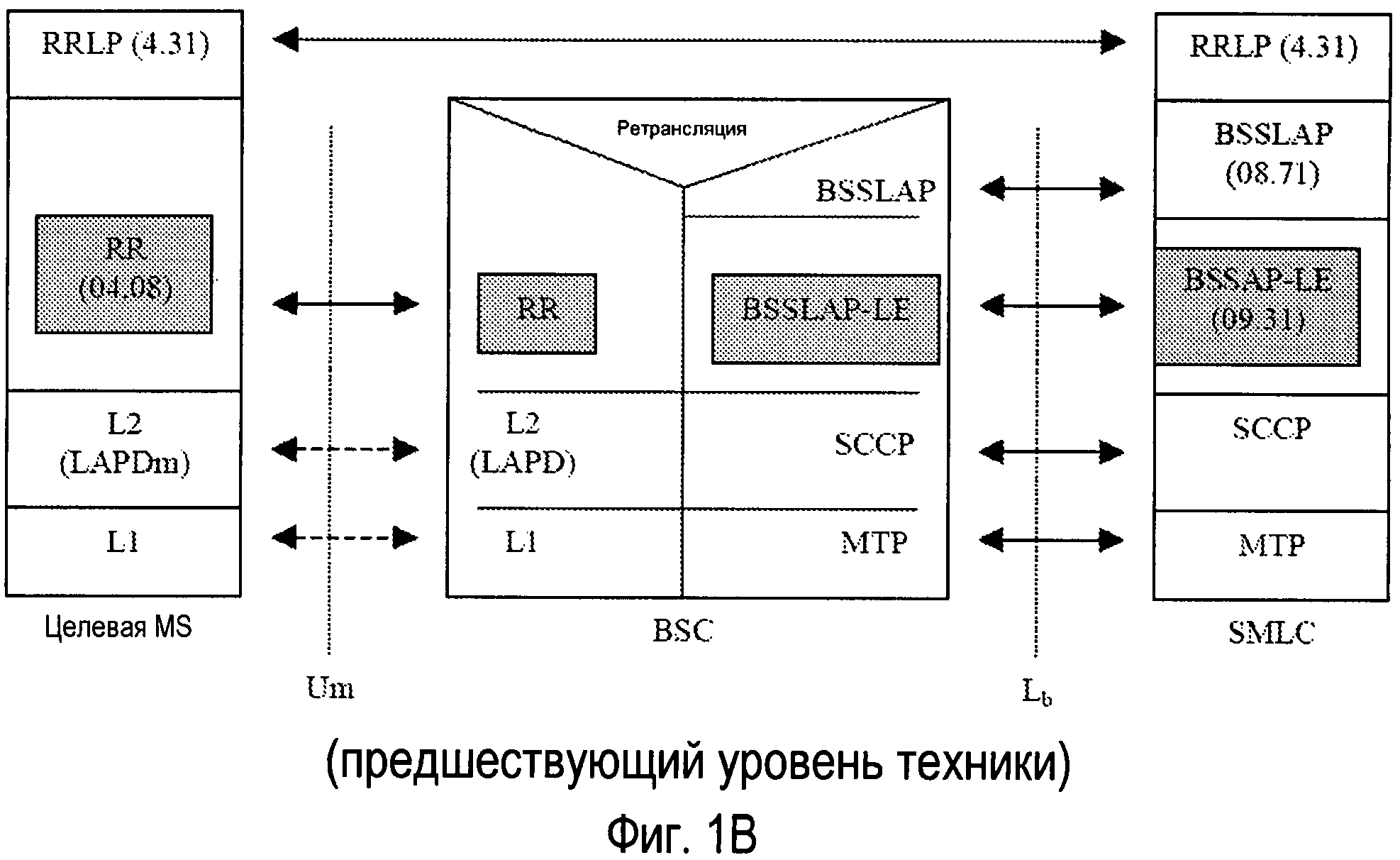
Фиг. 1B показывает многоуровневую модель Um- и Lb-интерфейсов. Уровни в MS 10 (целевой MS) включают в себя первый уровень, называемый физическим уровнем, уровнем один или L1, второй уровень, называемый L2 (LAPDm), третий уровень, называемый уровнем радиоресурсов (RR), моделируемым согласно техническим требованиям GSM 04.08, и, в завершение, прикладной уровень. В этом случае прикладной уровень - это протокол определения местоположения на основе радиоресурсов (RRLP), заданный в рекомендациях GSM 04.31 и GSM 04.35. BSS 20 (показана как BSC 24) имеет соответствующую многоуровневую модель, включающую в себя уровни L1, L2 (LAPD) и RR, где RRLP-сообщения проходят через BSS 20. BSS 20 ретранслирует нижние уровни по мере необходимости в SMLC 50 по Lb-интерфейсу. Уровни включают в себя уровни MTP, SCCP BSSLAP-LE и BSSLAP, которые соответствуют уровням MTP, SCCP BSSLAP-LE и BSSLAP в рамках SMLC 50. Дополнительную информацию по интерфейсам BSSAP-LE и BSSLAP см. в рекомендациях GSM 09,21 и GSM 08.71.
Сообщения, проходящие от одного элемента сети к другому элементу сети, могут проходить через несколько различных интерфейсов и соответствующих протоколов. Например, сообщения, проходящие от SMLC сервера определения местоположения 50 к BSS 20 к MS 10, должны передаваться как первое сообщение через Lb-интерфейс, возможно, другое сообщение через Abis-интерфейс и конечное сообщение через Um-интерфейс. В общем, в настоящем раскрытии для простоты сообщение упоминается по его названию прикладного уровня и радиоинтерфейса. Например, запрос от SMLC сервера определения местоположения 50, предназначенный для MS 10, может упоминаться по названию прикладного уровня Um-радиоинтерфейса запроса на измерение местоположения по протоколу RRLP. Дополнительно, для понятности, BSS 20 и SMLC 50 могут совместно упоминаться как сеть 70, которая может включать в себя BTS 22, BSC 24 и SMLC 50 или может включать в себя BSS 20 и SMLC 50.
Фиг. 1C показывает блок-схему последовательности сообщений обычного RRLP-сеанса. Во время a SMLC 50 отправляет сообщение запроса 80 в BSS 20 через Lb-интерфейс. BSS 20 повторно пакетирует и перенаправляет этот запрос как RRLP-запрос 85, передаваемый через Um-радиоинтерфейс нисходящей линии связи, в MS 10. Внутренне MS 10 начинает RRLP-сеанс и, в конечном счете, отвечает через Um-радиоинтерфейс восходящей линии связи с сообщением ответа RRLP 90. BSS 20 снова повторно пакетирует и перенаправляет этот ответ в SMLC 50 в сообщении ответа 95 через Lb-интерфейс, который SMLC 50 принимает как время b. В дальнейшем в этом документе такие запросы и ответы в и от SMLC 50 упоминаются как RRLP-запросы и RRLP-ответы.
Прикладной уровень 3GPP RRLP в настоящий момент поддерживает пять сообщений. Первое сообщение - это сообщение запроса на измерение местоположения по протоколу RRLP, используемое в нисходящей линии связи. Сеть 70 использует это сообщение для того, чтобы запрашивать измерения местоположения или оценку местоположения от MS 10. Сообщение включает в себя инструкции для MS 10 и также может включать в себя вспомогательные данные для MS 10. Вспомогательные данные подробнее описываются ниже. Второе сообщение - это сообщение ответа по измерению местоположения по протоколу RRLP, используемое в восходящей линии связи, и оно дополняет сообщение запроса на измерение местоположения по протоколу RRLP. MS 10 использует это сообщение для того, чтобы отвечать сети 70 с информацией об оценке местоположения и другой связанной с местоположением информацией. Сообщение запроса на измерение местоположения по протоколу RRLP и сообщение ответа по измерению местоположения по протоколу RRLP работают вместе, чтобы начинать и заканчивать RRLP-сеанс.
Третье и четвертое сообщения также работают вместе, чтобы начинать и заканчивать RRLP-сеанс. Третье сообщение - это другое сообщение нисходящей линии связи, упоминаемое как сообщение вспомогательных данных RRLP, которое сеть 70 использует для того, чтобы отправлять вспомогательные данные в MS 10. Вспомогательные данные необязательно включают в себя опорную информацию BTS согласно усовершенствованной отслеживаемой разности во времени (E-OTD) (например, сигнализацию BTS и информацию местоположения) и информацию об измерении E-OTD для восьми дополнительных BTS. Четвертое сообщение - это сообщение подтверждения приема (Ack) вспомогательных данных RRLP, используемое в восходящей линии связи. Сообщение подтверждения приема вспомогательных данных RRLP используется посредством MS 10 просто для того, чтобы подтверждать, в сеть 70, прием сообщения вспомогательных данных RRLP. Пятое сообщение - это нетипичное сообщение, называемое ошибкой протокола RRLP, которое может использоваться в нисходящей линии связи или в восходящей линии связи для того, чтобы сообщать отчет об ошибке в протоколе.
Фиг. 2 показывает блок-схему последовательности сообщений типичного процесса определения местоположения с использованием RRLP-сеансов. MS 10 и сеть 70 могут рассматриваться как клиент-серверная модель, где MS 10 выступает в качестве клиента, а сеть 70 выступает в качестве сервера. RRLP-сеанс начинается с запроса от сети 70 и типично завершается ответом от MS 10. Во время a процесс определения местоположения начинается с сообщения посредством сети 70 и MS 10 сообщением 110 вспомогательных данных RRLP. Таким образом, сеть 70 отправляет сообщение 110 вспомогательных данных RRLP в MS 10, и MS 10 начинает новый RRLP-сеанс при приеме сообщения 110 вспомогательных данных RRLP. Обычно, как показано во время b, MS 10 выполняет RRLP-сеанс с ответом по подтверждению приема, называемым сообщением 112 подтверждения приема вспомогательных данных RRLP.
Во время c сеть 70 отправляет сообщение 120 запроса на измерение местоположения по протоколу RRLP, которое включает в себя инструкцию местоположения и необязательно вспомогательные данные. Инструкция местоположения от сети 70 включает в себя максимальное время отклика (отклик сети), задаваемое посредством сети (NW), и минимальную точность (точность сети), также задаваемую посредством сети (NW). В ответ на прием сообщения 120 запроса на измерение местоположения по протоколу RRLP известная мобильная станция запускает свой GPS-механизм. GPS используется, в общем, чтобы означать систему определения местоположения с использованием искусственных спутников (SV) и/или псевдоспутников. Механизм также используется, в общем, как аппаратные средства, и/или микропрограммное обеспечение, и/или программное обеспечение, которое работает для того, чтобы обрабатывать данные. MS 10 затем определяет одну или более фиксаций местоположения, каждая из которых имеет оцененную неопределенность.
Если оцененная неопределенность меньше чем или равна минимальной точности сети (точности сети), сигнализируемой посредством сети 70, или если MS 10 вычисляет определение местоположения в течение максимально разрешенного посредством значения параметра времени отклика сети (отклика сети), обработка определения местоположения останавливается. Как показано во время d, MS 10 сообщает отчет о вычисленном определении местоположения в сообщении 122 ответа по измерению местоположения по протоколу RRLP и также выключает GPS-механизм. Различие во времени между привязками по времени c и d может быть существенным (например, от 45 секунд до нескольких минут). Одна цель при определении местоположения состоит в том, чтобы минимизировать это время обнаружения. Другая цель состоит в том, чтобы уменьшать неопределенность предоставляемого определения местоположения.
Фиг. 3 показывает псевдосегментацию вспомогательных данных. Вспомогательные данные могут включать в себя данные местоположения по одному или более искусственных спутников (SV). Поскольку вспомогательные данные типично содержат информацию о 8-12 или более спутников, вспомогательные данные разделяются на несколько блоков псевдосегментированных сообщений вспомогательных данных, при этом каждый блок содержит информацию об одном, двух, трех или четырех спутниках. В показанном примере вспомогательные данные сегментируют на три псевдосегмента. Первые два блока могут содержать информацию о трех или четырех спутниках, и конечный блок может содержать информацию об одном, двух или трех спутниках всего для семи-одиннадцати спутников в показанном примере.
Первый блок вспомогательных данных сообщают от сети 70 в MS 10 во время a в первом сообщении 140 вспомогательных данных RRLP. После приема первый сеанс RRLP начинается, но быстро заканчивается, когда MS 10 отправляет сообщение 142 подтверждения приема вспомогательных данных RRLP в сеть 70 во время b.
Второй блок вспомогательных данных сообщают от сети 70 в MS 10 во время c во втором сообщении 144 вспомогательных данных RRLP. После приема второй сеанс RRLP начинается. В этом примере во время d MS 10 не имеет времени, чтобы передавать сообщение подтверждения приема до того, как она принимает второе RR-сообщение (упоминаемое здесь как дополнительное RR-сообщение 130), которое заканчивает RRLP-сеанс, созданный посредством сообщения 144. Дополнительное RR-сообщение может быть любым из нескольких различных RR-сообщений. Например, RR-сообщение с более высоким приоритетом, такое как сообщение передачи обслуживания, возможно, передано в MS 10.
Сеанс называется прерванным по приоритету, если или MS 10 принимает часть RRLP-сообщения нисходящей линии связи либо вообще не принимает RRLP-сообщение нисходящей линии связи. Прерывание по приоритету осуществляется, когда сообщение помещается в исходящую очередь сети для передачи. В некоторых случаях, до того как передача RRLP-сообщения нисходящей линии связи может быть завершена, оставшаяся часть сообщения, еще не переданного, очищается из очереди для сообщения с более высоким приоритетом. В этих случаях MS 10, возможно, приняла часть, но не все, RRLP-сообщение нисходящей линии связи. В других случаях RRLP-сообщение нисходящей линии связи очищают даже до того, как первый бит сообщения передан по радиоинтерфейсу. В этих случаях сеанс также считается прерванным по приоритету, тем не менее, MS 10 не имеет сведений о существовании сеанса. Зачастую прерывание по приоритету осуществляется, когда RRLP-сообщение нисходящей линии связи является длинным или когда более длинные сообщения находятся перед ним (т.е. другие сообщения, диспетчеризованные на более раннее время передачи) в этой очереди в нисходящей линии связи.
С другой стороны, сеанс упоминается как прекращенный, если MS 10 принимает все RRLP-сообщение нисходящей линии связи, но еще не полностью отправила ответ, такой как сообщение подтверждения приема вспомогательных данных RRLP. Прекращение обычно осуществляется, когда MS 10 требуется относительно длительный период времени для того, чтобы отвечать на RRLP-сообщение нисходящей линии связи.
Как в случаях прерывания по приоритету, так и в случаях прекращения существующий сеанс в MS 10 и/или сети 70 заканчивается. Одна цель заключается в том, чтобы MS 10 быстро отвечала на RRLP-сообщения нисходящей линии связи, тем самым минимизируя число прекращенных сеансов. Другая цель заключается в том, чтобы сеть отправляла более короткие RRLP-сообщения нисходящей линии связи, тем самым поддерживая очередь менее заполненной и минимизируя число прерванных по приоритету сеансов. Псевдосегментация предназначена для второй цели создания более коротких RRLP-сообщений нисходящей линии связи, тем самым уменьшая вероятность прерванного по приоритету сеанса, но не разрешает первую цель быстрого реагирования на сообщения нисходящей линии связи, как дополнительно описано ниже для обработки, ассоциированной с сообщениями запроса на измерение местоположения по протоколу RRLP.
В дальнейшем в этом документе, термины "прекращение", "прекращать" или "прекращенный" используются при ссылке на завершение сеанса, вызываемое либо посредством прекращения сеанса вследствие приема дополнительного RR-сообщения, либо посредством прерывания по приоритету в очереди в нисходящей линии связи в соответствии с сообщением нисходящей линии связи с более высоким приоритетом.
Чтобы восстанавливаться после прекращенного сеанса, сеть 70 передает повторное сообщение. Повторное сообщение - это последующая передача сообщения, ранее помещенного в очередь в нисходящей линии связи. В примере, показанном во время e, второй блок вспомогательных данных включается в повторное сообщение вспомогательных данных RRLP 148, которое начинает третий RRLP-сеанс в MS 10. MS 10 подтверждает прием с другим сообщением подтверждения приема вспомогательных данных RRLP 150 в сеть 70 во время f.
Конечный блок вспомогательных данных передают от сети 70 в MS 10 во время g в сообщении 120 запроса на измерение местоположения по протоколу RRLP, которое принимают посредством MS 10, и начинают четвертый сеанс в этом примере. MS 10 теперь инструктируется начинать определение местоположения, что может занимать от нескольких десятков секунд до нескольких минут. В течение периода от приема инструкции до передачи ответа сеанс является уязвимым для прекращения сеанса посредством дополнительного RR-сообщения. В этом примере конечный сеанс не прекращается, а вместо этого MS 10 отвечает сообщениями 122 ответа по измерению местоположения по протоколу RRLP во время h.
Фиг. 4 и 5 иллюстрируют остановку определения местоположения на основе приема посредством MS 10 дополнительного RR-сообщения. На фиг. 4 во время a сеть 70 отправляет в MS 10 сообщение 110 вспомогательных данных RRLP, затем, во время b, MS 10 отвечает с сообщением 112 подтверждения приема вспомогательных данных RRLP. Сеть 70 и MS 10 могут повторять этот обмен сообщениями несколько раз, чтобы предоставлять оставшиеся из вспомогательных данных в MS 10 до запуска GPS-механизма. Во время c сеть 70 отправляет MS 10 сообщение 120 запроса на измерение местоположения по протоколу RRLP с конечным блоком вспомогательных данных. Здесь MS 10 запускает свой GPS-механизм и начинает определение местоположения.
Во время d сеть 70 отправляет в MS 10 дополнительное RR-сообщение 130 (т.е. сообщение, которое MS 10 не ожидает принимать, поскольку она находится в текущем сеансе). Это дополнительное RR-сообщение 130, которое предоставлено до того как MS 10 может передавать ответное сообщение, инструктирует MS 10 прекращать текущий сеанс, запущенный посредством сообщения 120 запроса на измерение местоположения по протоколу RRLP. В качестве части прекращения сеанса MS 10 выключает GPS-механизм, заканчивает процесс определения местоположения, отвечает на дополнительное RR-сообщение 130 и ожидает следующего запроса от сети 70. После короткой задержки ∆t во время e (где ∆t=e-d), сеть 70 передает повтор сообщения 120A запроса на измерение местоположения по протоколу RRLP, которое инструктирует MS 10 перезапускать свой GPS-механизм и начинать определение местоположения снова. Этот процесс отправки повторного сообщения 120A, за которым следует обрывание посредством дополнительного RR-сообщения 130, может происходить несколько раз до того, как MS 10 сможет определить свое местоположение в рамках времени отклика сети и предоставляемых параметров точности. Во время f MS 10 сообщает отчет об определенном местоположении в сеть 70 в сообщении 122 ответа по измерению местоположения по протоколу RRLP.
Фиг. 5 показывает этот обмен сообщениями в форме диаграммы состояний. Когда MS 10 принимает сообщение 120 запроса на измерение местоположения по протоколу RRLP, MS 10 переходит в состояние 200, которое запускает GPS-механизм и начинает определение местоположения. В обычном непрерывном режиме MS определяет местоположение 220 и сообщает отчет о местоположении сети посредством перехода в состояние 230, которое отправляет сообщение 122 ответа по измерению местоположения по протоколу RRLP. Когда местоположение не может быть определено в рамках предоставляемого времени отклика сети (например, когда возникает тайм-аут времени отклика), MS 10 может выходить из состояния 200 и переходить в состояние 230, где MS 10 отвечает с сообщением 122 ответа по измерению местоположения по протоколу RRLP, содержащему определение местоположения с точностью меньшей, чем запрашиваемая посредством сети.
Диаграмма состояний показывает другие случаи, которые могут происходить. Например, MS 10 выходит из состояния 200 и переходит в состояние 210, когда она принимает дополнительное RR-сообщение 130. В состоянии 210 MS 10 выключает GPS-механизм и останавливает определение местоположения. MS 10 выходит из состояния 210 и повторно входит в состояние 200, когда она принимает повторное сообщение 120A запроса на измерение местоположения по протоколу RRLP.
В конечном счете MS 10 обычно либо определяет местоположение, либо исчерпывает лимит времени 220 и переходит в состояние 230, чтобы отвечать с сообщением 122 ответа по измерению местоположения по протоколу RRLP.
В процессе определения местоположения, описанном выше, MS 10 ожидает до сообщения 120 запроса на измерение местоположения по протоколу RRLP перед запуском своего GPS-механизма и выключает свой GPS-механизм, когда она принимает дополнительное RR-сообщение 130, тем самым минимизируя длительность времени, когда GPS-механизм работает. Посредством запуска GPS-механизма в ответ на прием сообщения 120 запроса на измерение местоположения по протоколу RRLP, MS 10 знает, что сети 70 требуется определение местоположения. В любом другом случае отсутствует гарантия того, что сеть 70 не будет запрашивать определение местоположения из MS 10. Следовательно, посредством отказа от запуска до этого времени MS 10 экономит питание аккумулятора. MS 10 также экономит питание аккумулятора посредством выключения GPS-механизма, как только RRLP-сеанс завершен (например, в результате прекращения или отчета по определению местоположения).
В соответствии с некоторыми вариантами осуществления настоящего изобретения преимущества могут быть реализованы посредством отказа от следования известной процедуре и запуска вместо этого GPS-механизма в предположении приема сообщения 120 запроса на измерение местоположения по протоколу RRLP. Кроме того, преимущества могут быть реализованы посредством отказа от выключения GPS-механизма, как только RRLP-сеанс завершен. За счет расхода энергии аккумулятора GPS-механизм может быть запущен раньше (т.е. до того как сообщение 120 запроса на измерение местоположения по протоколу RRLP принимается) и может продолжать процесс определения местоположения, даже если RRLP-сеанс закончен.
Фиг. 6 и 7 показывают события, которые запускают и выключают GPS-механизм, в соответствии с вариантами осуществления настоящего изобретения. Диаграмма состояний по фиг. 6 показывает два состояния: состояние 800, где GPS-механизм не работает, и состояние 810, где GPS-механизм запущен и процесс определения местоположения начат. Может происходить несколько инициирующих событий со стороны пользователя и стороны сети, которые инициируют ранний запуск GPS-механизма в предположении будущего приема сообщения 120 запроса на измерение местоположения по протоколу RRLP. Инициирующее событие происходит с начала рабочего режима. Т.е. инициирующее событие - это не просто включение мобильной станции, которое переводит мобильную станцию в рабочий режим. Некоторые устройства всегда запускают GPS-механизм и, таким образом, отсутствует инициирующее событие для того, чтобы запускать GPS-механизм. Инициирующее событие не является пользовательской операцией для того, чтобы специально включать функцию определения местоположения по GPS мобильной станции. Инициирующее событие - это событие, которое в типичном варианте не включает GPS-механизм. Кроме того, инициирующее событие происходит до приема сообщения запроса на измерение местоположения по протоколу RRLP, которое является сообщением, которое типично включает GPS-механизм.
Сначала на 820, если MS 10 обнаруживает инициирующее событие, что вызов служб экстренной помощи (ES) инициирован, MS 10 может переходить из состояния 800 в состояние 810. Инициированный стороной другого пользователя переход может осуществляться, если MS 10 приняла сообщение от приложения мобильной станции (MS APP), указывающее то, что требуется определение местоположения. События стороны сети также могут инициировать переход из состояния 800 в состояние 810. Например на 840, если MS 10 принимает инициирующее событие нового сообщения вспомогательных данных RRLP, MS 10 может переходить из состояния 800 в состояние 810. На 850, если MS 10 принимает инициирующее событие в форме сообщения дополнительных платных услуг (VAS), MS 10 может переходить из состояния 800 в состояние 810. Для полноты, на 860, известный процесс перехода между состояниями показан посредством приема сообщения 120 запроса на измерение местоположения по протоколу RRLP.
Помимо раннего запуска, как описано со ссылкой на фиг. 6, выключение GPS-механизма может быть преимущественно отложено, как показано на фиг. 7, что также включает в себя два состояния. В состоянии 900 GPS-механизм запущен (например, вследствие одного из событий, описанных выше). В состоянии 910 GPS-механизм выключается. Несколько событий могут инициировать переход из состояния 900 в состояние 910, чтобы выключать GPS-механизм. Например, может извлекаться местоположение или может возникать тайм-аут. На 920 переход осуществляется в результате недавней отправки сообщения 122 ответа по измерению местоположения по протоколу RRLP, когда нет другой существенной потребности для продолжения работы механизма, к примеру ожидания посредством MS APP более оптимального определения местоположения. Переход также может осуществляться, когда определение местоположения только что сообщено в отчете в MS APP и MS 10 не предполагает сообщения 120 запроса на измерение местоположения по протоколу RRLP и не ожидает отправлять сообщение 122 ответа по измерению местоположения по протоколу RRLP.
Анормальные случаи также могут вызывать переход. Например, на 940, если MS 10 предполагала сообщение 120 запроса на измерение местоположения по протоколу RRLP (например, вследствие событий 820 или 840, описанных выше), но не принимала сообщение в течение предварительно определенного периода времени (например, 45, 60 или 90 секунд или значения, выбираемого из диапазона времен в 30-60, 30-90, 30-120, 30-180, 30-240, 60-90, 60-120, 60-180, 60-240, 90-120, 90-180, 90-240, 120-180, 120-240 и т.п., как должны понимать специалисты в данной области техники), MS 10 может выключать свой GPS-механизм. Аналогично на 940, если GPS-механизм выполнялся слишком долго (например, 120 или 180 секунд), MS 10 может исчерпывать лимит времени и выключать GPS-механизм, чтобы экономить энергию аккумулятора.
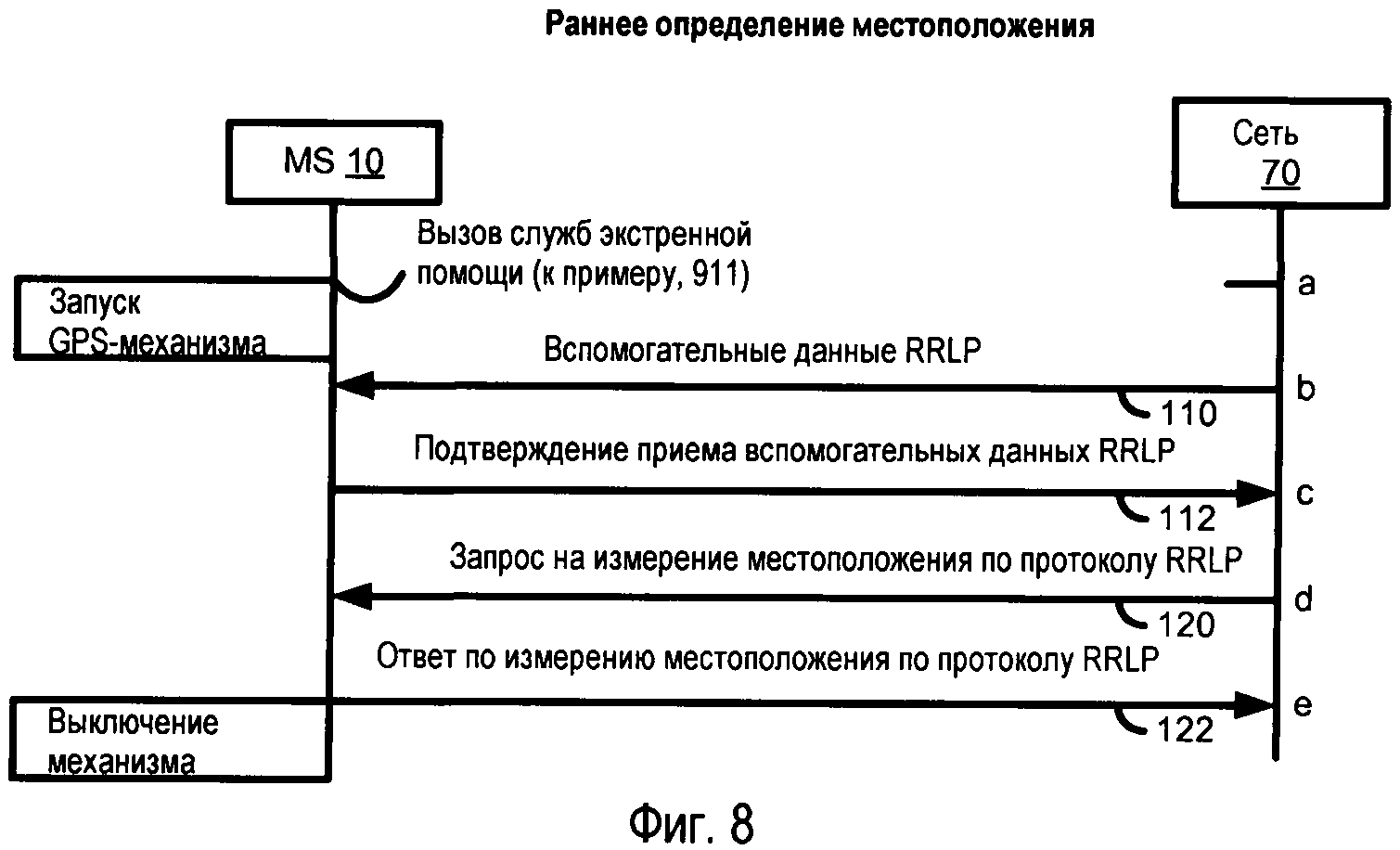
Фиг. 8 показывает блок-схему последовательности сообщений, иллюстрирующую раннее определение местоположения в соответствии с вариантами осуществления настоящего изобретения. Одна цель состоит в том, чтобы запускать GPS-механизм, как только MS 10 ожидает или предполагает будущее сообщение 120 запроса на измерение местоположения по протоколу RRLP от сети 70. Во время a MS 10 распознает набираемые цифры для вызова служб экстренной помощи (например, "911" в США, "112" в Европе или "119" в Японии). Как только вызов распознан как вызов служб экстренной помощи, MS 10 может начинать определение местоположения посредством запуска своего GPS-механизма в ожидании потребности в определении местоположения MS 10.
Во время b сеть 70 отправляет сообщение 110 вспомогательных данных RRLP в MS 10. В ответ, во время c, MS 10 отвечает с сообщением 112 подтверждения приема вспомогательных данных RRLP. Этот процесс отправки сообщений 110 и 112 может повторяться до тех пор, пока сеть 70 не передала достаточно вспомогательных данных. В завершение, во время d, сеть 70 отправляет сообщение 120 запроса на измерение местоположения по протоколу RRLP в MS 10. MS 10 продолжает определять свое местоположение. Затем во время e MS 10 отвечает в сеть 70 с сообщением 122 ответа по измерению местоположения по протоколу RRLP, содержащим ее определенное местоположение.
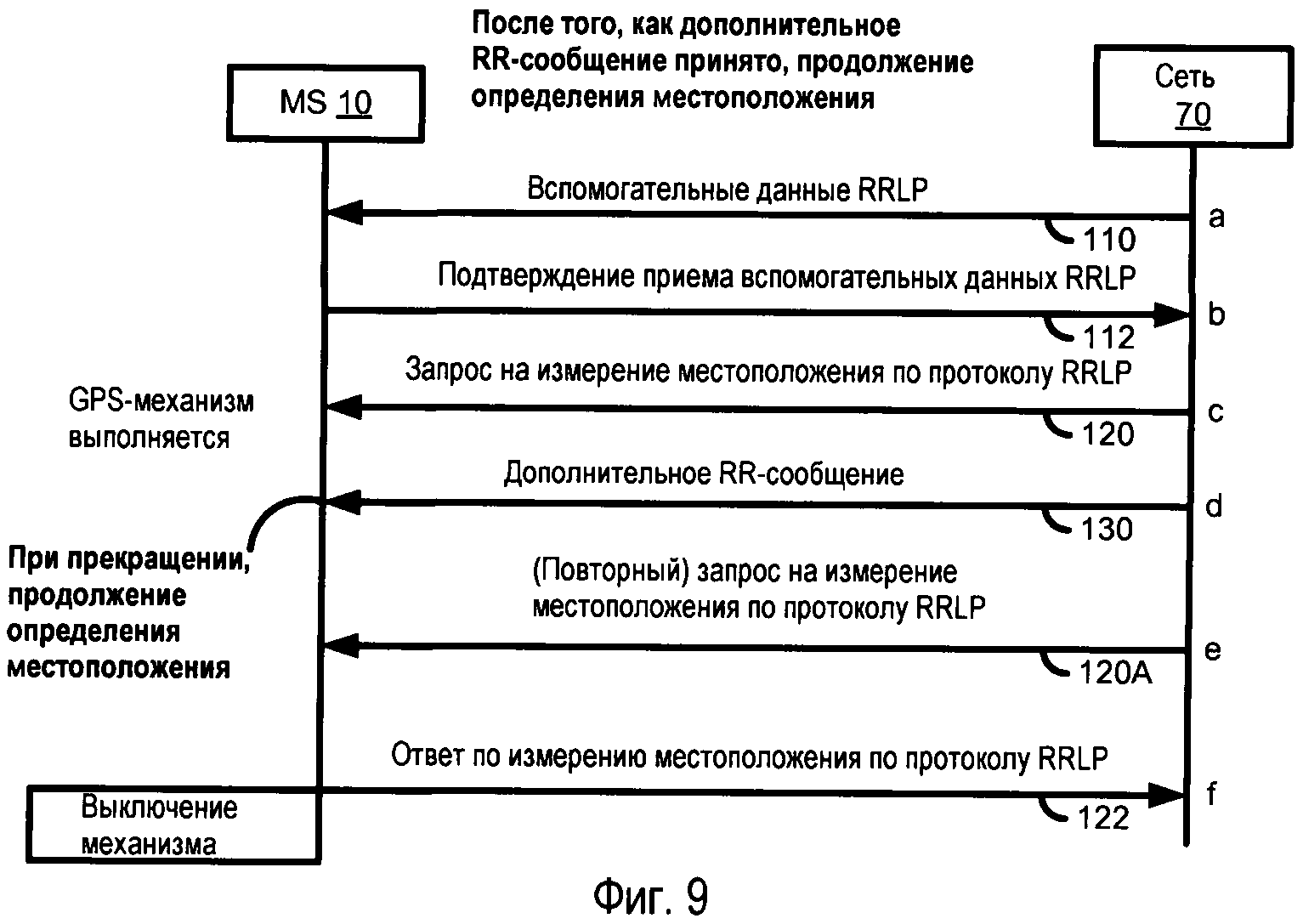
Фиг. 9 и 10 иллюстрируют способ продолжения определения местоположения после того, как дополнительное RR-сообщение 130 принято, в соответствии с вариантами осуществления настоящего изобретения. Другая цель состоит в том, чтобы продолжать работу GPS-механизма через незначительные анормальные события. На фиг. 9 дополнительное RR-сообщение 130 прекращает текущий сеанс измерения, но MS 10 продолжает обработку определения местоположения и не обрывает работу своего GPS-механизма. Во время a MS 10 принимает сообщение 110 вспомогательных данных RRLP от сети 70. В ответ во время b MS 10 отвечает с сообщением 112 подтверждения приема вспомогательных данных RRLP. С другой стороны, этот процесс отправки сообщений 110 и 112 может повторяться до тех пор, пока сеть 70 не передала достаточно вспомогательных данных.
Во время c сеть 70 отправляет сообщение 120 запроса на измерение местоположения по протоколу RRLP в MS 10. На этой стадии GPS-механизм уже запущен либо на основе распознавания посредством MS 10 экстренного вызова, либо на основе другого инициирующего события. Во время d, до того как сеть 70 принимает ответ, сеть 70 обрывает RRLP-сеанс, начатый во время c. Известные мобильные станции заканчивают RRLP-сеанс и также выключают GPS-механизм. Здесь MS 10 не обрывает работу GPS-механизма, чтобы давать возможность ему продолжать процесс определения местоположения.
В завершение, во время e, сеть 70 повторно отправляет сообщение 120A запроса на измерение местоположения по протоколу RRLP в MS 10 в процессе повторного запроса. С другой стороны, MS 10 не перезапускает GPS-механизм, а вместо этого продолжает процесс определения местоположения. Как указано выше, процессы прекращения и повторов могут повторяться. Затем во время f MS 10 отвечает в сеть 70 с сообщением 122 ответа по измерению местоположения по протоколу RRLP, содержащим ее определенное местоположение.
Фиг. 10 показывает диаграмму состояний. MS 10 переходит в состояние 300, когда происходит инициирующее событие. Инициирующие события включают в себя прием сообщения 120 запроса на измерение местоположения по протоколу RRLP, прием сообщения 110 вспомогательных данных RRLP, распознавание инициирования вызова служб экстренной помощи и т.п. В состоянии 300 MS 10 продолжает определение местоположения, если уже работает, или начинает определение местоположения посредством запуска GPS-механизма, если еще не запущен.
Обычно MS 10 выходит из состояния 300 либо когда местоположение определяется, либо когда время истекает (показано как переход 310), и переходит в состояние 320. Тайм-аут может, например, иметь место когда MS 10 определяет то, что сеть 70 ожидает измерение в рамках небольшого предварительно определенного количества времени. В некоторых случаях MS 10 выходит из состояния 300 и переходит в состояние 330, когда MS 10 принимает дополнительное RR-сообщение 130, которое прекращает текущий RRLP-сеанс до того, как MS 10 может отправлять свой ответ.
В состоянии 330 MS 10 прекращает текущий RRLP-сеанс, но продолжает определение местоположения. При приеме повторного сообщения 120A запроса на измерение местоположения по протоколу RRLP MS 10 переходит в состояние 340, но снова продолжает процесс определения местоположения. Как только MS 10 определяет местоположение или возникает тайм-аут (показан как переход 340), MS 10 выходит из состояния 340 и переходит в состояние 320. В состоянии 320 MS 10 отправляет свое сообщение ответа по измерению местоположения по протоколу RRLP 320 в сеть 70.
Фиг. 11 и 12 иллюстрируют способ оптимального упорядочения загруженных вспомогательных данных в соответствии с вариантами осуществления настоящего изобретения. Вспомогательные данные могут быть переданы в одном или более (псевдосегментированных) сообщений 110 вспомогательных данных RRLP и/или в сообщении 120 запроса на измерение местоположения по протоколу RRLP. Оптимальное упорядочение передачи вспомогательных данных из сети 70 в MS 10 дает возможность MS 10 преимущественно начинать процесс определения местоположения раньше и активно использовать сегменты вспомогательных данных до соответствующего инструктирования посредством сообщения 120 запроса на измерение местоположения по протоколу RRLP.
Фиг. 11 показывает оптимальное упорядочение сегментированных вспомогательных данных 400. Первый сегмент включает в себя опорную информацию 410, включающую в себя спутниковое время и приблизительное местоположение 420 MS. Первый и оставшиеся сегменты включают в себя информацию 430 местоположения искусственного спутника (в том числе данные альманахов и эфемерид). Информация 430 местоположения искусственных спутников упорядочивается от наиболее оптимальных 440 к следующим по оптимальности 450 и продолжается к наименее оптимальным 460. Не все доступные спутники должны помещаться в этот оптимально упорядоченный список вспомогательных данных.
Оптимальное упорядочение спутников может принимать во внимание один или более факторов, чтобы предоставлять в MS 10 набор спутников, видимых с наибольшей вероятностью и полезных для MS 10 в том, чтобы быстро определять ее местоположение. Например, знание приблизительного местоположения MS может использоваться для того, чтобы выполнять поиск местоположений спутника, показанных эмпирически как видимые для мобильных станций с аналогичными приблизительными местоположениями MS. Сеть 70 может выполнять поиск спутников, которые находятся в области пространства, показанной посредством наблюдения или экспериментирования, которые должны быть доступными для мобильной станции, имеющей аналогичное или идентичное приблизительное местоположение MS.
Кроме того, знание приблизительного местоположения MS может использоваться для того, чтобы определять общую характеристику окружения. Эта характеристика окружения может использоваться для того, чтобы идентифицировать оптимальные спутники, чтобы давать возможность MS 10 определять свое местоположение. Приблизительное местоположение MS может идентифицировать MS 10 как располагающуюся, например, в сельском ландшафте (например, в плоском сельском окружении), в горном ландшафте (например, в ориентированной с севера на юг долине или вдоль западного склона годы) или в городском ландшафте (например, в плотном центре города с высотными зданиями). Если приблизительное местоположение MS указывает, что MS 10, вероятнее всего, имеет полную видимость неба, сеть 70 может сначала предоставлять информацию местоположения спутников для ортонормированного или псевдоортонормированного набора спутников, например трех спутников, ближайших до 45 градусов от горизонта, разделенных на 120 градусов друг от друга. Любые два из этих трех спутников приблизительно ортогонально ориентированы относительно мобильной станции. Таким образом, первая линия между первым спутником и мобильной станцией и вторая линия между вторым спутником и мобильной станцией формирует (ортонормированный) прямой угол или угол от 60 до 120 градусов (приблизительно ортогонально ориентированный). Если приблизительное местоположение MS предлагает, что MS 10 не может видеть спутники, находящиеся в конкретной области пространства (например, если гора блокирует небо с востока), то информация местоположения для этих спутников может находиться ниже в оптимальном списке спутников (или даже вообще удаляться из списка).
В дополнение к опорной информации 410 первый сегмент вспомогательных данных также может включать в себя информацию об одном или двух спутниках, в соответствии с допустимой длиной сообщения. Первый сегмент включает в себя информацию местоположения спутников, которые являются наиболее оптимальными 440 для MS 10. Второй сегмент вспомогательных данных включает в себя информацию местоположения спутников для следующих двух, трех или четырех наиболее оптимальных спутников 450. Каждый последующий сегмент вспомогательных данных включает в себя информацию местоположения спутников для равного или меньшего количества оптимальных спутников до тех пор, пока набор наименее оптимальных 460 спутников не достигнут.
Фиг. 12 показывает блок-схему последовательности операций способа для упорядочения и отправки сегментов вспомогательных данных. На этапе 500 сеть 70 упорядочивает список спутников от наиболее оптимального к наименее оптимальному в MS 10, чтобы формировать упорядоченный список, оба списка, которые также могут сохраняться в запоминающем устройстве в рамках сети 70. Порядок может быть конкретным для каждой MS 10. Например, порядок может зависеть от приблизительного местоположения MS. На этапе 510 сеть 70 отправляет первое сегментированное сообщение 110 вспомогательных данных RRLP, включающее в себя опорную информацию (т.е. начало отсчета времени и приблизительное местоположение MS) и информацию местоположения спутников для наиболее оптимальных спутников.
На этапе 520 сеть 70, например, с помощью логики контроллера или контроллера в рамках сети 70 определяет то, наступило или нет времени отправлять сообщение 120 запроса на измерение местоположения по протоколу RRLP. Сеть 70 может определять то, что наступило время отправлять сообщение 120 запроса на измерение местоположения по протоколу RRLP, если достаточные вспомогательные данные уже отправлены в MS 10. Если MS 10 имеет информацию местоположения спутников, по меньшей мере, для предварительно определенного числа спутников (например, 4-14 спутников), то сеть 70 может определять то, что MS 10 имеет достаточный объем вспомогательных данных. Альтернативно, если предварительно определенное число спутников не достигнуто, но более нет доступной информации по спутникам для того, чтобы передавать сообщение вспомогательных данных, сеть может или передавать сообщение запроса на измерение местоположения по протоколу RRLP (с или без конечного фрагмента вспомогательных данных) или может задавать таймер так, что сообщение запроса на измерение местоположения по протоколу RRLP отправляется, чтобы принимать сообщение ответа по измерению местоположения по протоколу RRLP своевременно. Альтернативно сеть 70 может определять то, что MS 10 имеет достаточный объем вспомогательных данных, если оставшееся время до того, как определение местоположения требуется посредством сети 70, меньше предварительно определенного количества времени. В этом случае сеть 70 определяет то, что наступило время отправлять сообщение 120 запроса на измерение местоположения по протоколу RRLP, если возник тайм-аут. Альтернативно сеть 70 может определять то, что наступило время отправлять сообщение 120 запроса на измерение местоположения по протоколу RRLP, если все вспомогательные данные ранее отправлены.
Если не время отправлять сообщение 120 запроса на измерение местоположения по протоколу RRLP, сеть 70 может переходить к этапу 530. Если наступило время отправлять сообщение 120 запроса на измерение местоположения по протоколу RRLP, сеть 70 может переходить к этапу 540. На этапе 530 сеть 70 отправляет следующее сегментированное сообщение 110 вспомогательных данных RRLP, включающее в себя информацию местоположения для группы следующих наиболее оптимальных спутников, затем возвращается к этапу 520. Этот цикл между этапами 520 и 530 может повторяться множество раз. На этапе 540 сеть 70 отправляет сообщение 120 запроса на измерение местоположения по протоколу RRLP. Сообщение 120 запроса на измерение местоположения по протоколу RRLP может содержать конечный сегмент вспомогательных данных. Альтернативно, в сообщении 120 запроса на измерение местоположения по протоколу RRLP вообще могут отсутствовать вспомогательные данные, как подробно поясняется ниже.
Фиг. 13 и 14 показывают способ отправки своевременных запросов местоположения в соответствии с вариантами осуществления настоящего изобретения.
На фиг. 13, во время a, сеть 70 начинает RRLP-сеанс посредством отправки RRLP-сообщения, такого как сообщение 120 запроса на измерение местоположения по протоколу RRLP. Этот сценарий предполагает, что сеть 70 успешно отправила одно или более сообщений 110 вспомогательных данных RRLP в MS 10 или что MS 10 уже имеет вспомогательные данные в запоминающем устройстве. В показанном примере сеть 70 требует определения местоположения от MS 10 приблизительно через 35 секунд. Во время b RRLP-сеанс прекращается вследствие некоторого другого RR-сообщения 131.
В некоторых случаях RRLP-сообщение 120, показанное во время a, по-прежнему может быть в исходящей очереди сети 70, таким образом MS 10 не принимала RRLP-сообщение и не запускала RRLP-сеанс. В этом случае другое RR-сообщение 131 прерывает по приоритету RRLP-сообщение 120 посредством его удаления из очереди до того, как оно может быть успешно и полностью передано из очереди. Вследствие предшествующего приема посредством MS 10 инициирующего события, такого как первое сообщение вспомогательных данных RRLP (не показано), GPS-механизм уже выполняется. Во время каждого последующего сообщения GPS-механизм продолжает необрывный процесс определения местоположения.
Сеть 70 во время c определяет то, что только минимум времени остается до тех пор, пока определение местоположения не потребуется (например, приблизительно 4 секунды остается). Сеть 70 отправляет сообщение 120B запроса на измерение местоположения по протоколу RRLP в MS 10. Это сообщение 120B отправляется во время (время c) так, что ответ принимается своевременно (во время d). В некоторых вариантах осуществления сообщение 120B запроса на измерение местоположения по протоколу RRLP отправляется с параметрами времени отклика сети и точности сети, но без вспомогательных данных. Сообщение 120 запроса на измерение местоположения по протоколу RRLP может включать в себя короткий тайм-аут (например, время отклика сети представляет 2 или 4 секунды), в течение которого MS 10 должна возвращать определение местоположения и может содержать низкое значение для неопределенности (точность сети указывает высокую точность, например, приблизительно 10 метров). Альтернативно, сообщение 120 запроса на измерение местоположения по протоколу RRLP может включать в себя набор параметров точности местоположения, чтобы разрешать большую неопределенность местоположения (точность сети указывает низкую точность, например приблизительно 250 метров). Во время d сеть 70 принимает сообщение 122 ответа по измерению местоположения по протоколу RRLP от MS 10 своевременно, когда остается примерно 0 секунд или почти 0 секунд.
Эта своевременная процедура может быть задействована, поскольку необходима повторная отправка вследствие ранее оборванного RRLP-сеанса. В некоторых случаях оборванный RRLP-сеанс должен быть сеансом, запущенным посредством более раннего сообщения 120 запроса на измерение местоположения по протоколу RRLP (как показано). В некоторых случаях оборванный RRLP-сеанс должен быть сеансом, запущенным посредством сообщения 110 вспомогательных данных RRLP. В некоторых случаях оборванный RRLP-сеанс может быть сеансом, запущенным либо посредством более раннего сообщения 120 запроса на измерение местоположения по протоколу RRLP, либо посредством сообщения 110 вспомогательных данных RRLP.
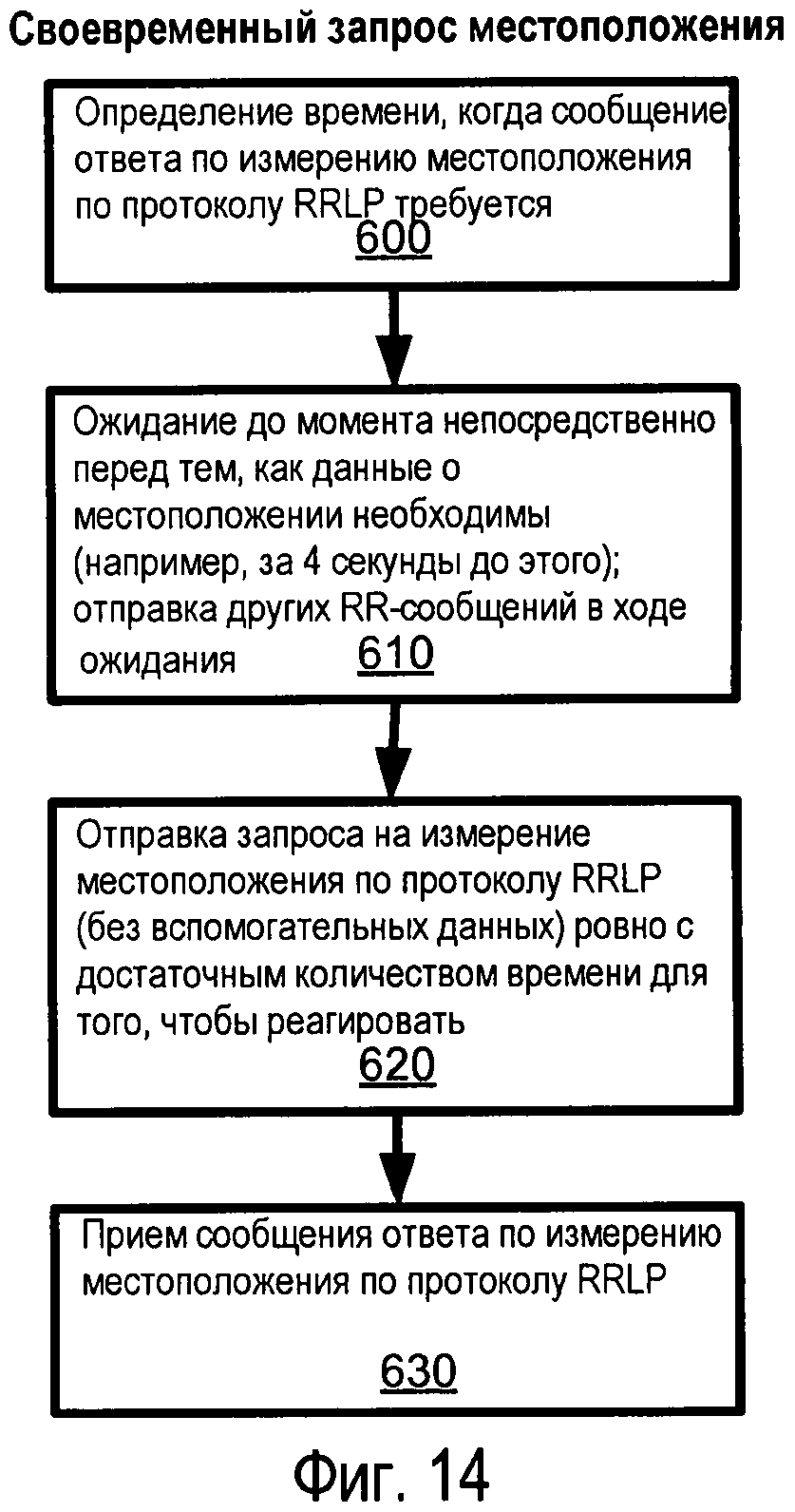
Фиг. 14 показывает процесс в сети 70 для своевременных запросов и ответов по местоположению. На этапе 600 сеть 70 определяет будущее время, когда сообщение 122 ответа по измерению местоположения по протоколу RRLP требуется. На этапе 610 сеть 70 устанавливается таймер, расписание и т.п. и ожидает до момента непосредственно перед тем, как данные о местоположении необходимы (например, за 4 секунды до этого). В течение этого времени ожидания после последнего RRLP-сообщения и перед своевременным сообщением 120 запроса на измерение местоположения по протоколу RRLP сеть может отправлять другие RR-сообщения и не обрывать процесс определения местоположения мобильной станции.
На этапе 620 сеть 70 отправляет сообщение 120 запроса на измерение местоположения по протоколу RRLP. Это сообщение 120 отправляется без вспомогательных данных во время, предоставляя MS 10 достаточное количество времени для того, чтобы реагировать. На этапе 630 сеть 70 принимает сообщение 122 ответа по измерению местоположения по протоколу RRLP непосредственно перед тем, как местоположение требуется.
Как упомянуто выше, этот своевременный процесс может реализовываться для всех сообщений 120 запроса на измерение местоположения по протоколу RRLP, передаваемых посредством сети 70. Ожидание, чтобы отправлять сообщение 120 запроса на измерение местоположения по протоколу RRLP, до момента непосредственно перед тем, как определение местоположения требуется (например, при осуществлении повторных запросов), помогает уменьшать число прекращенных сеансов и экономит полосу пропускания канала. Альтернативно этот процесс может реализовываться, если одно или более прекращений и/или прерываний по приоритету произошло в пределах текущего обмена данными с этой MS 10. Альтернативно этот процесс может реализовываться, если одно или более прекращений или прерываний произошло при осуществлении связи с другими мобильными станциями в этой соте, например, для мобильных станций, имеющих аналогичные приблизительные местоположения MS.
Фиг. 15 и 16 показывают способ задержки (или отбрасывания) новых RR-сообщений, чтобы уклоняться от прекращенных сеансов, в соответствии с вариантами осуществления настоящего изобретения.
Фиг. 15 показывает способ минимизации повторных отправок между сетью 70 и MS 10 в беспроводной сети. Во время a сеть 10 отправляет сообщение 100 RRLP-запроса, тем самым открывая сеанс. Сообщение 100 RRLP-запроса может быть либо сообщением 110 вспомогательных данных RRLP, либо сообщением 120 запроса на измерение местоположения по протоколу RRLP. Во время b, до того как сеть 10 приняла ответ от MS 10, сеть 70 определяет, в то время когда RRLP-сеанс является по-прежнему открытым, что новое RR-сообщение готово к отправке из сети 70 в MS 10. В известных системах сеть 70 сразу отправляет это новое RR-сообщение, тем самым прекращая текущий RRLP-сеанс. Согласно вариантам осуществления настоящего изобретения сеть 70 ожидает, если допустимо, чтобы отправлять новые RR-сообщения, чтобы уклоняться от прекращения текущего RRLP-сеанса. Таким образом, чтобы уклоняться от прекращения RRLP-сеанса, сеть 70 удерживает новое RR-сообщение до момента, пока сообщение 102 ответа/подтверждения приема RRLP не принято, тем самым нормально закрывая RRLP-сеанс. На основе конкретного нового RR-сообщения сеть 70 может или ожидать, чтобы отправлять новое RR-сообщение, или полностью отбрасывать новое RR-сообщение. Во время c сеть 70 принимает и распознает сообщение 102 ответа/подтверждения приема RRLP. Вскоре после этого, во время d, если новое RR-сообщение не отброшено, сеть 70 отправляет новое RR-сообщение после того, как RRLP-сеанс закрыт, тем самым уклоняясь от прекращения RRLP-сеанса.
На фиг. 16 на этапе 650 сеть 70 отправляет сообщение RRLP-запроса. На этапе 660, до того как RRLP-сеанс закрыт, сеть 70 определяет то, что она имеет новое RR-сообщение, готовое к отправке в MS 10. На этапе 670 сеть 70 определяет то, разрешено или нет задерживать (или отбрасывать) отправку нового RR-сообщения. Если не разрешено, сеть 70 отправляет новое RR-сообщение на этапе 690, тем самым неизбежно прекращая текущий RRLP-сеанс. На этапе 680 сеть 70 ожидает и затем принимает сообщение 102 ответа/подтверждения приема RRLP. Если новое RR-сообщение задержано, обработка переходит к этапу 690 перед завершением обработки. Если новое RR-сообщение отброшено, нет нового RR-сообщения, остающегося для отправки, и обработка заканчивается.
Фиг. 17, 18, 19, 20 и 21 иллюстрируют способ изменения параметра точности, чтобы балансировать время отклика и точность при вызове служб экстренной помощи (ES), в соответствии с вариантами осуществления настоящего изобретения.
Фиг. 17 показывает пример обработки последовательности операций вызова для вызова служб экстренной помощи (ES), чтобы использовать повышенную точность, когда время доступно. Во время a (t=0), MS 10 идентифицирует вызов ES. В ответ на идентификацию вызова ES MS 10 запускает GPS-механизм. MS 10 может задавать таймер активности равным большому значению (например, Act_timer=40 секунд). Одно назначение времени активности состоит в том, чтобы отслеживать активность (или неактивность) сообщений между сетью 70 и MS 10. Если нет активности на протяжении определенного времени, то таймер активности истечет и GPS-механизм выключится.
Во время b сеть 70 отправляет первое сообщение 140 вспомогательных данных RRLP. Это первое сообщение 140 содержит опорную информацию 410 (спутниковое время и приблизительное местоположение 420 MS из фиг. 11). Оно также содержит информацию местоположения спутников по спутникам, наиболее оптимальным для MS 10. Во время c MS 10 отвечает с сообщением 142 подтверждения приема вспомогательных данных RRLP. Во время d и время e процесс обмена сообщениями вспомогательных данных 144 и сообщениями подтверждения приема 146 может повторяться один или более раз, чтобы отправлять дополнительные вспомогательные данные (информацию местоположения спутников) по спутникам, следующим по оптимальности для MS 10.
Затем сеть 70 подготавливает сообщение 120 запроса на измерение местоположения по протоколу RRLP. Сообщение 120 запроса на измерение местоположения по протоколу RRLP может содержать значение для параметра времени отклика сети (время отклика сети). Этот параметр времени отклика сети может быть задан таким образом, чтобы указывать промежуточное время отклика (например, значение 4 соответствует 16 секундам). Сообщение 120 также может содержать параметр точности сети (точность сети). Этот параметр точности сети может быть задан так, чтобы указывать промежуточную точность или неопределенность (например, значение 19 соответствует 51,2 метра). Этот параметр и другие параметры расстояния или неопределенности, или дальности, описанные в данном документе с конкретными значениями, предоставляются только в качестве примеров. Другие значения могут использоваться. Значение 51,2 метра или 245,5 метра, например, могут быть значениями в рамках 40-60 метров, 30-70 метров, 40-100 метров, 40-400 метров, 100-150 метров, 100-250 метров, 100-300 метров, 100-400 метров и т.п., как должны понимать специалисты в данной области техники.
Во время f сеть 70 отправляет сообщение 120 запроса на измерение местоположения по протоколу RRLP. В некоторых случаях последний набор вспомогательных данных включают в это сообщение 120. В других случаях последний набор вспомогательных данных включают в предыдущее сообщение, которое является сообщением 144 вспомогательных данных RRLP.
Чтобы повышать точность, MS 10 может использовать значение точности, которое представляет небольшую или вообще не представляет неопределенность. Например, параметр Act_Accuracy может задаваться равным значению 0, которое представляет 0 метров неопределенности (наибольшее значение точности). Альтернативно, параметр Act_Accuracy может задаваться равным значению 1, 2, 3 или 4, чтобы представлять неопределенность 1,0, 2,1, 3,3 или 4,6 метра соответственно. Другие значения, вообще не представляющие или представляющие небольшую неопределенность, также могут использоваться.
В некоторых случаях, где MS 10 активирует этот процесс повышенной точности, MS 10 преимущественно задает параметры Act_Accuracy независимо от параметра точности сети, отправляемого посредством сети 70. В других случаях, где сеть 70 активирует процесс повышенной точности, сеть 70 преимущественно и временно переопределяет свою стандартную точность сети (например, 51,2 м) и задает параметры, которые она позднее передает в сообщении 120 запроса на измерение местоположения по протоколу RRLP равными значению точности, которое не представляет неопределенность или представляет небольшую неопределенность.
Также показано, после времени f, что MS 10 сбрасывает свой таймер активности с текущего времени обратного отсчета (например, 20 секунд) до значения, которое совпадает со временем отклика сети (Act_timer=время отклика сети), например, если оставшееся время в текущем таймере активности меньше времени отклика сети. Таким образом, MS 10 не выключает преждевременно GPS-механизм до того, как определение местоположения на основе измерения определено и передано в сеть 70. MS 10 аналогично может задавать второй таймер обратного отсчета равным времени отклика (Act_timer=время отклика сети). Этот таймер может использоваться посредством MS 10 для того, чтобы задавать, когда MS 10 отправляет определенное местоположение.
Во время g истекшее время в примере составляет 36 секунд. MS 10 использовала все выделенное время отклика сети при определении местоположения. Таким образом, даже когда точность определения местоположения не достигнута, найдено местоположение повышенной точности, потенциально имеющее большую точность (или аналогично, меньшую неопределенность), чем запрошено посредством стандартной точности сети (например, 51,2 м).
Посредством уменьшения этого параметра неопределенности до 0 MS 10 должна использовать все допустимое время отклика сети при вычислении местоположения. Посредством уменьшения параметра неопределенности до небольшого значения (например, 1, 2, 3 или 4), MS 10, наиболее вероятно, должна использовать все допустимое время отклика сети, если только местоположение не может быть определено с низкой оцененной неопределенностью. Дополнительное время, используемое посредством GPS-механизма в попытке получать определение местоположения с пониженной требуемой неопределенностью, дает возможность MS 10 возможность формировать определение местоположения повышенной точности.
Во время g MS 10 отправляет сообщение 122 ответа по измерению местоположения по протоколу RRLP с одним из следующих компонентов: LocationInfo; GSP-MeasureInfo; или LocationError. Как правило, MS 10 должна отвечать посредством компонента LocationInfo, когда MS 10 определяет допустимое определение местоположения или исчерпывает лимит времени. Альтернативно, MS 10 должна отвечать посредством компонента GSP-MeasureInfo, когда MS 10 инструктируется предоставлять измерения в сеть 70, что дает возможность сети 70 определять местоположение на основе этих необработанных данных.
Фиг. 18 показывает другой вариант осуществления обработки последовательности операций вызова для вызова служб экстренной помощи (ES). В этом сценарии сообщения запроса местоположения передаются своевременно для MS 10, чтобы отвечать с ответом по местоположению во включенном состоянии. Последовательность операций начинается, как описано выше со ссылкой на фиг. 17. Во время а (t=0), MS 10 идентифицирует вызов ES, затем в ответ запускает GPS-механизм. С другой стороны, таймер обратного отсчета активности задается (Act_timer=40 секунд). Во время b сеть 70 отправляет первое сообщение 140 вспомогательных данных RRLP. Во время c MS 10 отвечает с сообщением 142 вспомогательных данных RRLP. Процесс может продолжаться, чтобы передавать несколько наборов 140/142 сообщений.
Во время d этот сценарий отступает от ранее описанного сценария. Во время d сеть 70 имеет информацию, что она должна отправлять сообщение запроса местоположения (сообщение 120 запроса на измерение местоположения по протоколу RRLP), тем не менее, сеть 70 ожидает, чтобы отправлять сообщение, до предварительно определенного времени до того, как сеть 70 должна выполнять определение местоположения. Стандартная точность сети может быть задана так, чтобы предоставлять достаточную точность (точность сети=19, представляющая 51,2 метра), тем не менее, время отклика сети радикально сокращается. Например, время отклика сети может быть задано равным 2 (представляя 4 секунды) или 1 (представляя 2 секунды) вместо предоставления для MS 10 десятков секунд. Это радикально сокращенное время обычно не дает возможность мобильной станции определять местоположение. Обычно мобильная станция требует от десятков секунд до нескольких минут. Здесь, поскольку MS 10 начала свой процесс определения местоположения рано (например, во время a), она уже работала над своим местоположением в течение десятков секунд.
Так же сеть 70 подготавливает сообщение 120 запроса на измерение местоположения по протоколу RRLP. Сообщение 120 содержит радикально сокращенное время отклика сети (например, время отклика сети=4 секунды) и точность сети (например, точность сети=51,2 метра). Во время e истекшее время в примере составляет 32 секунды и сеть 70 отправляет сообщение 120 запроса на измерение местоположения по протоколу RRLP. В этом случае последний набор вспомогательных данных включается в предыдущее сообщение (т.е. последнее сообщение 140 вспомогательных данных RRLP), следовательно, эти сообщения 120 отправляют без вспомогательных данных.
В некоторых случаях точность, используемая посредством MS 10, задается равной значению, представляющему низкую точность, или, эквивалентно, высокую неопределенность (например, значение 34 представляет 245,5 метров), которое может быть предварительно определенным значением или предварительно определенным конфигурируемым значением. Это значение точности, представляющее низкую точность, может быть задано одним из двух способов: посредством сети 70 или посредством MS 10.
Если значение точности задается посредством сети 70, сеть 70 отправляет сообщение 120 запроса на измерение местоположения по протоколу RRLP с точностью сети, заданной таким образом, чтобы представлять это низкое значение точности (точность сети). Например, сеть 70 может временно перезаписывать стандартную точность сети с помощью низкого значения точности для этой MS 10.
С другой стороны, если точность задается посредством MS 10, сеть 70 может отправлять сообщение 120 запроса на измерение местоположения по протоколу RRLP с точностью сети, заданной так, чтобы представлять стандартную точность сети. MS 10 перезаписывает или игнорирует принимаемую точность сети и использует вместо этого значение, представляющее низкую точность. MS 10 использует время отклика сети (время отклика сети) как для своего его внутреннего таймера обратного отсчета, так и для своего таймера времени отклика (т.е. Act_timer=время отклика сети и Act_RT=время отклика сети, соответственно). Во время f, как только таймер времени отклика равен нулю (истекшее время в примере составляет 36 секунд), MS 10 подготавливает и отправляет сообщение 122 ответа по измерению местоположения по протоколу RRLP.
Этот сценарий имеет несколько преимуществ. Поскольку MS 10 запустила GPS-механизм рано (во время a), то использовала максимальную возможную длительность времени при определении местоположения при одновременной минимизации потери энергии аккумулятора и сформировала усовершенствованное определение местоположения. Поскольку сообщение 120 запроса на измерение местоположения по протоколу RRLP является коротким (поскольку оно не содержит вспомогательных данных), вероятность того, что сообщение 120 прерываться по приоритету, снижается. Поскольку время отклика сети является низким (например, 4 секунды), вероятность прекращения конечного RRLP-сеанса другими RR-сообщениями понижается. Если пониженное значение точности (например, Act_Accuracy=245,5 метров) подставлено вместо стандартной точности сети (например, точность сети=51,2 метра), вероятность прекращения конечного RRLP-сеанса другими RR-сообщениями дополнительно понижается.
Фиг. 19 показывает еще один вариант осуществления обработки последовательности операций вызова для вызова служб экстренной помощи (ES). В этом сценарии первое сообщение 120 запроса местоположения (с или без вспомогательных данных) передается только после конечного сообщения 142 вспомогательных данных RRLP. Если этот RRLP-сеанс обрывается, сеть 70 задерживает отправку повторного сообщения 120A запроса местоположения (сообщения без вспомогательных данных) до предварительно определенного времени на основе того, когда определение местоположения требуется. Иначе, события и последовательность сообщений от времени а до времени f являются идентичными описанным выше со ссылкой на фиг. 17, и их описание не повторяется.
Последовательность отклоняется от фиг. 17, во время g, где дополнительное RR-сообщение 130 заставляет текущий RRLP-сеанс прекратиться. Эквивалентно, сообщение 120 запроса на измерение местоположения по протоколу RRLP, возможно, прервано по приоритету внутренне в исходящей очереди сети (например, поскольку сообщение 120 запроса на измерение местоположения по протоколу RRLP является длинным, так как оно содержит вспомогательные данные). В любом случае MS 10 не имеет в данный момент открытого RRLP-сеанса или инструкции, чтобы отвечать с местоположением.
Сеть 70 задерживает отправку повторного сообщения 120A до времени, вычисленного, чтобы давать MS 10 достаточно времени ровно для того, чтобы отвечать с определением местоположения, так что определение местоположения принимается своевременно для сети 70 так, чтобы сообщать отчет о нем. На основе более раннего прекращения или прерывания по приоритету сеанса RRLP сеть 70 может определять переключаться ли с первого режима на второй режим. В первом режиме сеть 70 выполняет повторную отправку на основе преждевременно остановленного RRLP-сеанса и отправляет повторное сообщение запроса местоположения, сразу как оно становится известным. Таким образом, сеть 70 базирует время отправки следующего сообщения запроса местоположения на прошлом событии, а именно выполнении дополнительного RR-сообщения и необходимости повторно отправлять сообщение запроса местоположения максимально быстро.
В этом втором режиме сеть 70 сразу не отправляет повторное сообщение запроса местоположения. Вместо этого сеть 70 преимущественно ожидает на протяжении определенного времени на основе того, когда ответ по местоположению необходим. Таким образом, вместо базирования времени отправки повторного сообщения запроса местоположения на прошлом событии передача базируется на будущем событии. Например, время отправки следующего запроса местоположения базируется на том, когда определение местоположения требуется (например, на основе оставшегося времени отклика сети).
Время, когда сообщение 120 запроса на измерение местоположения по протоколу RRLP передается, может быть основано на предварительно определенном времени до того времени, когда определение местоположения требуется в сети 70. В показанном примере предварительно определенное время задается равным 8 секундам (время отклика сети=3) до того, как информация местоположения требуется посредством сети 70. Другие предварительно определенные времена могут использоваться, например, на основе эмпирических данных различных мобильных станций, другие предварительно определенные времена могут использоваться (например, время отклика сети может быть задано равным 1, 2, 4, 8 или 16 секунд). Сеть 70 может устанавливать таймер или диспетчеризовать сообщение запроса измерения так, что сообщение передается в это будущее время.
Во время h (t=32) сеть 70 заканчивает задержку и передает повторное сообщение 120A запроса на измерение местоположения по протоколу RRLP. Как указано, сообщение не содержит вспомогательных данных. Альтернативно, задержка в отправке повторного сообщения 120A запроса на измерение местоположения по протоколу RRLP может быть незначительно сокращена, время отклика (время отклика сети) может быть незначительно увеличено, и сообщение 120A может содержать некоторые вспомогательные данные. Кроме того, параметр точности, используемый посредством MS 10, может быть задан равным большому значению неопределенности (например, 245,5 метра) либо посредством перезаписи посредством MS 10 стандартного значения сети, либо посредством сети 70 в качестве временного значения неопределенности. MS 10 сбрасывает свой таймер активности до времени отклика сети (Act_timer=время отклика сети).
В этом примере таймер активности мобильного абонента задается так, чтобы истекать через 4 секунды (Act_timer=4 секунды), но этот таймер сбрасывается на основе принимаемого времени (изменение Act_timer=время отклика сети=8 секунд). MS 10 может задавать свое время отклика равным времени отклика сети (Act_RT=время отклика сети=8 секунд). Во время i (t=36) MS 10 сообщает отчет об определенном местоположении с сообщением 122 ответа по измерению местоположения по протоколу RRLP, затем выключает GPS-механизм.
Фиг. 20 показывает сценарий, где сеть 70 передает своевременное сообщение запроса измерения, но более раннее повторное сообщение вспомогательных данных инструктирует MS 10 использовать точность сети. События и сообщения во время от a до d идентичны сообщениям по фиг. 19. Во время e сеанс прекращается с дополнительным RR-сообщением 144. Аналогично, сеть может иметь прерванный по приоритету переход сообщений 144. Во время f и g вспомогательные данные отправляются как повторное сообщение 144A вспомогательных данных RRLP, и их прием подтверждается посредством сообщения 146 подтверждения приема вспомогательных данных RRLP. Повторное сообщение может быть повторной отправкой первого сообщения вспомогательных данных (не показано), вторым сообщением вспомогательных данных (как показано) или любым другим из сегментированной последовательности сообщений вспомогательных данных (не показаны).
Во время h (t=20) сеть 70 отправляет сообщение 120 запроса на измерение местоположения по протоколу RRLP для своевременного приема сообщения отчета об измерениях, как описано выше. MS 10 может задавать свой таймер активности равным времени отклика сети (Act_timer=время отклика сети=16 секунд), может задавать свой таймер отклика равным времени отклика сети (Act_RT=время отклика сети=16 секунд) и может задавать свою точность равной точности сети (Act_Accuracy=точность сети=51,2 метра).
В предыдущих примерах MS 10 обычно использует значение точности, которое является временным значением. Это временное значение является другим значением, которое больше или меньше стандартной точности сети. В этом примере стандартная точность сети используется как исключение использованию другого значения. В завершение, во время i (t=36), MS 10 сообщает отчет об определенном измерении в сообщениях 122 ответа по измерению местоположения по протоколу RRLP.
В некоторых случаях сеть 70 может обнаруживать событие повторной отправки (вследствие прекращения или прерывания по приоритету). В этом случае сеть 70 модифицирует точность сети от временного значения до стандартной точности сети. Альтернативно, MS 10 может обнаруживать событие повторного сообщения вспомогательных данных (вследствие прекращения) и на основе этого события MS модифицирует свою точность из значения. Альтернативно, MS может определять то, что принимаемое сообщение запроса измерения задерживается на основе измеренной длительности времени от предыдущего RRLP-сообщения.
Фиг. 21 показывает блок-схему последовательности операций способа, касающуюся модификации параметра точности от стандартной точности сети, как описано со ссылкой на предыдущие четыре чертежа. На этапе 700, после того как MS 10 приняла сообщение 120 запроса на измерение местоположения по протоколу RRLP, выполняется определение в отношении того, отправлено и принято сообщение 120 вовремя или нет. Это определение может осуществляться посредством MS 10 или сети 70 на основе времени (например, некоторого ожидаемого времени связи), на основе прекращений или на основе прерываний по приоритету, как описано выше. Если сообщение 120 запроса на измерение местоположения по протоколу RRLP отправлено вовремя, обработка продолжается на этапе 710.
На этапе 710 MS 10 использует точность, превышающую обычную точность (например, 0 метров), для максимальной точности или выбранное небольшое значение, меньшее стандартной точности сети (например, значение 1-10 метров или значение от 0 метров до стандартного значения точности сети), для более точного ответа.
Если сообщение 120 запроса на измерение местоположения по протоколу RRLP задерживается, точность может быть задана равной стандартной точности сети (не показана). Альтернативно, если сообщение 120 запроса на измерение местоположения по протоколу RRLP задерживается, обработка продолжается на этапе 720. Другой тест может выполняться на этапе 720, чтобы определять то, задержано сообщение 120 незначительно или очень значительно. Например, сообщение 120 запроса на измерение местоположения по протоколу RRLP может быть определено как незначительно задержанное, если повторная отправка сообщения вспомогательных данных выполнена. Сообщение 120 запроса на измерение местоположения по протоколу RRLP может быть определено как значительно задержанное, если повторная отправка предыдущего сообщения запроса на измерение местоположения по протоколу RRLP выполнена. Альтернативно, сообщение 120 запроса на измерение местоположения по протоколу RRLP может быть определено как незначительно задержанное, если оно передается позднее, чем в первое предварительно определенное время (например, 24 секунды), но перед вторым предварительно определенным временем (например, 36 секунд). Сообщение 120 запроса на измерение местоположения по протоколу RRLP может быть определено как значительно задержанное, если передается позднее, чем во второе предварительно определенное время. На этапе 730, MS 10 использует стандартную точность сети (т.е. точность сети). На этапе 740, MS 10 использует более низкое значение точности (например, 100, 200 или 250 метров), чтобы ускорять свой ответ по местоположению.
Фиг. 22 показывает блок-схему последовательности сообщений для услуги добавленного значения (VAS), в соответствии с вариантами осуществления настоящего изобретения. Для VAS, MS 10 не обязательно должна использовать все время отклика сети.
Во время а (t=0) сеть 70 определяет то, что VAS инициирована. В ответ она отправляет сообщение 140 вспомогательных данных RRLP. MS 10, при приеме сообщения 140 вспомогательных данных RRLP, запускает свой GPS-механизм и задает свой таймер активности равным предварительно определенному значению (большему значению, чем используется в случае вызова ES, например, Act_timer=45 секунд). Также в ответ на прием сообщения 140 вспомогательных данных RRLP MS 10 отправляет, во время b, сообщение 142 подтверждения приема вспомогательных данных RRLP. Во время c и d дополнительные сегменты вспомогательных данных могут передаваться, а их прием подтверждаться с дополнительными парами сообщений 144 вспомогательных данных RRLP и сообщений 146 подтверждения приема вспомогательных данных RRLP.
Во время e (t=20, Act_timer=25) сеть 70 подготавливает сообщение запроса на измерение местоположения по протоколу RRLP со стандартным временем сети (например, время отклика сети=16 секунд) и стандартным значением точности сети (например, точность сети=51,2 метра). Сеть 70 отправляет и MS 10 принимает сообщение 120 запроса на измерение местоположения по протоколу RRLP. В отличие от вызова ES MS 10 не отбрасывает сетевые параметры. MS 10 задает свой таймер активности, активный таймер отклика и параметры точности активности равными значениям сети (т.е. Act_timer=время отклика сети, Act_RT=время отклика сети, и Act_Accuracy=точность сети соответственно).
Во время f (t=34, Act_timer=2) MS 10 отправляет свое определенное местоположение в сообщении 122 ответа по измерению местоположения по протоколу RRLP в сеть 70. В этом случае MS отправляет определенное местоположения до истечения времени отклика сети, вследствие того, что неопределенность местоположения меньше требуемой точности сети. В завершение, в ответ на сообщение отчета об определенном местоположении, MS 10 выключает GPS-механизм.
Следует понимать, что изобретение может осуществляться на практике с модификациями и изменениями в рамках сущности и объема прилагаемой формулы изобретения. Описание не имеет намерение быть исчерпывающим или ограничивать изобретение точной раскрытой формой. Следует понимать, что изобретение может осуществляться на практике с модификациями и изменениями.
Реферат
Изобретение относится к области систем связи, а именно к улучшению определения местоположения с помощью глобальной навигационной спутниковой системы. Технический результат заключается в снижении негативного влияния на время и скорость обнаружения местоположения мобильной станции при повышении точности определения местоположения. Для этого способ уменьшения числа повторных сообщений запроса определения местоположения между сетью и мобильной станцией в беспроводной сети содержит ожидание до предварительно определенного времени, причем предварительно определенное время основано на времени, когда данные о местоположении должны быть использованы, передачу, в предварительно определенное время, сообщения запроса определения местоположения, содержащего время отклика сети и точность сети, и прием, в момент времени до того, как данные о местоположении должны быть использованы, сообщения ответа по определению местоположения, содержащего данные о местоположении. 8 н. и 33 з.п. ф-лы, 24 ил.
Формула
- ожидание до предварительно определенного времени, причем предварительно определенное время основано на времени, когда данные о местоположении должны быть использованы;
- передачу, в предварительно определенное время, сообщения запроса определения местоположения, содержащего время отклика сети и точность сети; и
- прием, в момент времени до того, как данные о местоположении должны быть использованы, сообщения ответа по определению местоположения, содержащего данные о местоположении.
- передачу сообщения вспомогательных данных; и
- прием сообщения подтверждения вспомогательных данных.
- передают сообщение вспомогательных данных согласно протоколу определения местоположения;
- принимают сообщение подтверждения вспомогательных данных согласно протоколу определения местоположения;
- ожидают до предварительно определенного времени, причем предварительно определенное время основано на времени, когда должны быть использованы данные о местоположении;
- передают, в предварительно определенное время, сообщение запроса определения местоположения согласно протоколу определения местоположения, содержащее время отклика сети и точность сети, причем время отклика сети содержит значение, представляющее сокращенное время отклика не более 4 с, причем точность сети содержит значение, представляющее низкую точность не менее 100 м, и причем сообщение запроса определения местоположения согласно протоколу определения местоположения не содержит вспомогательных данных; и
- принимают, во время до того, как данные о местоположении должны быть использованы, сообщение ответа определения местоположения согласно протоколу определения местоположения, содержащего данные о местоположении.
- таймер, чтобы ожидать до предварительно определенного времени, причем предварительно определенное время основано на времени, когда должны быть использованы данные о местоположении;
- передающее устройство, чтобы передавать, в предварительно определенное время, сообщение запроса определения местоположения, содержащее время отклика сети и точность сети; и
- приемное устройство, чтобы принимать, во время до того, как данные о местоположении должны быть использованы, сообщение ответа определения местоположения, содержащее данные о местоположении.
- ожидать до предварительно определенного времени, причем предварительно определенное время основано на времени, когда данные о местоположении должны быть использованы;
- передавать, в предварительно определенное время, сообщение запроса определения местоположения, содержащее время отклика сети и точность сети; и
- принимать, в момент времени до того, как данные о местоположении должны быть использованы, сообщение ответа по определению местоположения, содержащее данные о местоположении.
- передавать сообщение вспомогательных данных; и
- принимать сообщение подтверждения вспомогательных данных.
- отправляют сообщение запроса, чтобы открыть сеанс между сетью и мобильной станцией;
- получают, в то время когда сеанс является открытым, сообщение радиоресурсов, которое готово к отправке в мобильную станцию;
- запрещают передачу сообщения радиоресурсов к мобильной станции, чтобы избежать прекращения сеанса посредством передачи сообщения радиоресурсов; и
- принимают сообщение ответа, чтобы закрыть сеанс.
- ожидают, чтобы отправить сообщение радиоресурсов; и
- отправляют сообщение радиоресурсов после того, как сеанс закрыт.
- средство для отправки сообщения запроса, чтобы открыть сеанс в мобильной станции;
- средство для определения, в то время когда сеанс является открытым, сообщения радиоресурсов, которое готово к отправке в мобильную станцию;
- средство для запрещения передачи сообщения радиоресурсов к мобильной станции, чтобы избежать прекращения сеанса сообщением радиоресурсов; и
- средство для приема сообщения ответа, чтобы закрыть сеанс.
- средство для ожидания, чтобы отправить сообщение радиоресурсов; и
- средство для отправки сообщения радиоресурсов после того, как сеанс закрыт.
- передающее устройство, чтобы отправлять сообщение запроса, тем самым открывая сеанс в мобильной станции;
- логический блок, чтобы определять, в то время когда сеанс является открытым, что сообщение радиоресурсов готово к отправке в мобильную станцию;
- логический блок, чтобы избегать прекращения сеанса сообщением радиоресурсов; и
- приемное устройство, чтобы принимать сообщение ответа, тем самым закрывая сеанс.
- таймер, чтобы ожидать, чтобы отправить сообщение радиоресурсов;
- причем передающее устройство дополнительно должно отправлять сообщение радиоресурсов после того, как сеанс закрыт.
- отправлять сообщение запроса, тем самым открывая сеанс между сетью и мобильной станцией;
- получать, в то время когда сеанс является открытым, сообщение радиоресурсов, которое готово к отправке в мобильную станцию;
- запрещать передачу сообщения радиоресурсов к мобильной станции, чтобы избежать прекращения сеанса сообщением радиоресурсов; и
- принимать сообщение ответа, тем самым закрывая сеанс.
- ожидать, чтобы отправить сообщение радиоресурсов; и
- отправлять сообщение радиоресурсов после того, как сеанс закрыт.
Комментарии