Способ связи в ad hoc сети - RU2697833C2
Код документа: RU2697833C2
Чертежи
Описание
Настоящее изобретение относится к способу связи в ad hoc сети (динамической самоорганизующейся сети) и устройству связи, реализующему этот способ.
Изобретение относится к области связи в беспроводных сетях. Изобретение, в частности, подходит для сетей типа ad hoc без инфраструктуры, содержащих устройства мобильной связи, таких как сети типа MANET (Mobile Ad hoc NETwork (мобильная ad hoc сеть)).
В мобильной ad hoc сети каждое устройство связи в сети является устройством беспроводной связи, соединенным с другими устройствами связи в сети с помощью набора линий связи, причем этот набор может меняться с течением времени. Линии связи между двумя устройствами связи могут быть линиями прямой связи, то естьсвязь между этими двумя устройствами связи происходит без посредников, или непрямой связи, то есть по меньшей мере одно устройство связи в сети служит посредником между двумя устройствами связи, которые должны осуществлять связь между собой, например, когда два устройства связи, которые должны осуществлять связь, находятся слишком далеко друг от друга или разделены препятствием. Линии связи устанавливаются автоматически с помощью протокола связи для мобильных сетей, например, типа LSR (Link State Routing (маршрутизация с учетом состояния каналов)).
Беспроводная связь между устройствами связи в сети может быть основана, например, на стандартах цифровой телефонии, таких как, например, стандарт DECT (Digital Enhanced Cordless Telephone (усовершенствованный цифровой беспроводной телефон)), или стандарт PHS (Personal Handyphone System (персональный миниатюрный радиотелефон)), или на стандартах цифровой связи, таких как, например, стандарт Wi-Fi (ISO/IEC 8802-11). Устройства связи могут затем обмениваться данными изображений, видеоданными, аудиоданными, сигнальными данными и т.д. Среди устройств связи в сети одно может быть координирующим устройством связи, называемым координирующим (согласующим) устройством, тогда как другие устройства связи являются подчиненными устройствами связи, называемыми подчиненными устройствами. В некоторых приложениях мобильных ad hoc сетей координирующее устройство используется человеком, называемым координирующим человеком, который управляет действиями, предпринимаемыми рядом людей, называемых подчиненными людьми, каждым подчиненный человек осуществляет связь с координирующим человеком с использованием подчиненного устройства. Кроме того, координирующее устройство может централизовать некоторые операции, которые должны выполняться во время действия, такого как, например, синхронизация часов устройств связи в ad hoc сети.
В некоторых приложениях мобильных ad hoc сетей выгодно иметь возможность определять взаимное положение устройств связи относительно друг друга. Например, чтобы иметь возможность координировать действие, координирующему человеку может быть важно знать, где точно располагаются подчиненные люди, которыми он управляет. При определении взаимных положений, как правило, используется средство позиционирования, такое как модуль позиционирования, причем модуль позиционирования выполнен с возможностью, например, интеграции непосредственно в устройство связи. Модуль позиционирования может быть, например, модулем спутникового позиционирования, использующим систему GPS (Global Positioning System (система глобального позиционирования)), систему позиционирования GLONASS (GLObalnaïa NAvigatsionaïa Spoutnikovaïa Sistéma (глобальная навигационная спутниковая система)), или систему позиционирования Galileo (Галилео).
Системы спутникового позиционирования очень эффективны вне помещений, но намного менее эффективны в ограниченной среде, такой как здание или структура, такая как туннель, подземная площадка и т.д. Известны и устройства связи, использующие средства позиционирования, лучше подходящие для ограниченных сред. Средствами позиционирования, подходящими для ограниченных сред, являются, например, модуль позиционирования, использующий UWB (ультраширокополосную) модуляцию. UWB модуляция основана на передаче импульсов очень короткой длительности, часто меньше одной наносекунды. UWB модуляция, как правило, использует такие способы модуляции, как фазоимпульсная модуляция (PPM), амплитудная манипуляция (OOK) или двухфазный тип. UWB модуляция может использоваться для передачи данных, как правило, на короткие расстояния. UWB модуляция также может использоваться для позиционирования. Таким образом можно оборудовать устройства связи, которые должны позиционировать себя относительно друг друга в ограниченной среде, модулем позиционирования, основанным на использовании UWB модуляции. Оборудованное таким модулем позиционирования первое устройство связи может получать информацию, представляющую собой взаимное положение упомянутого первого устройства связи относительно второго устройства связи, такую как расстояние, путем отправки данных второму устройству связи в форме модулированных импульсов в соответствии с UWB модуляцией, называемых UWB импульсами. Второе устройство связи затем оценивает расстояние, отделяющееся его от первого устройства связи, путем измерения времени распространения UWB импульсов, и ретранслирует эту информацию первому устройству связи. Также можно определить взаимное положение каждого устройства связи в ad hoc сети, содержащей по меньшей мере три устройства связи, путем использования метода триангуляции.
Одна из особенностей мобильных ad hoc сетей заключается в том, что каждое устройство связи может перемещаться независимо. Перемещения устройства связи приводят к изменениям условий связи. Таким образом, с течением времени возможности связи устройства связи могут уменьшаться, пока оно больше не сможет осуществлять связь с другими устройствами связи в сети. Уменьшение возможностей связи устройства связи может быть вызвано явлением интерференции. Известно, что стандарты беспроводной связи DECT, PHS или Wi-Fi особенно чувствительны к явлению интерференции из-за отражения радиоволн на препятствиях, таких как стены, что особенно часто происходит в ограниченном пространстве. Однако некоторые применения мобильных ad hoc сетей требуют постоянной связи между подчиненными людьми и координирующим человеком.
Желательно преодолеть эти различные недостатки предшествующего уровня техники.
В частности, желательно обеспечить мобильную ad hoc сеть, в которой связь между устройствами связи сохраняется на максимально большом расстоянии. В частности, желательно преодолеть недостатки средства беспроводной связи, при этом обеспечивая решение, которое является простым в реализации и имеет низкую стоимость.
В соответствии с первым аспектом настоящее изобретение относится к способу связи в ad hoc сети, ad hoc сети, содержащей координирующее устройство мобильной связи, называемое координирующим устройством, и множество подчиненных устройств мобильной связи, называемых подчиненными устройствами, причем каждое устройство связи содержит модуль беспроводной связи и модуль позиционирования, использующий передачу первых импульсов, модулированных в соответствии с первой ультраширокополосной модуляцией, для определения информации, представляющей собой положение упомянутого устройства связи. Способ содержит следующие этапы, когда он реализуется устройством связи, на которых: получают данные, которые должны быть переданы; проверяют возможность передачи модуля беспроводной связи; когда модуль беспроводной связи не позволяет передавать данные, используют модуль позиционирования для передачи упомянутых данных в форме вторых импульсов, ортогональных первым импульсам.
Таким образом изобретение позволяет с выгодой использовать модуль позиционирования, использующий передачу импульса, модулированного в соответствии с ультраширокополосной модуляцией, для преодоления недостатков модуля беспроводной связи.
В соответствии с одним вариантом осуществления модуль позиционирования использует первую антенну, имеющую первую полярность, для передачи первых импульсов и вторую антенну, имеющую полярность, ортогональную первой полярности, для передачи вторых импульсов.
Использование антенн с ортогональными полярностями позволяет получить первый и второй ортогональные ультраширокополосные импульсы и, таким образом, избежать использования модуля позиционирования для реализации функции связи, влияющей на возможности позиционирования модуля позиционирования.
В соответствии с одним вариантом осуществления этап, на котором используют модуль позиционирования для передачи упомянутых данных в форме вторых импульсов, ортогональных первым импульсам, содержит этап, на котором получают вторую ультраширокополосную модуляцию, позволяющую получать вторые импульсы, ортогональные первым импульсам, упомянутые данные передаются с использованием второй модуляции.
Использование модуляции, позволяющей получать для реализации функции связи модулем позиционирования ультраширокополосные импульсы, ортогональные ультраширокополосным импульсам, используемым для реализации функцию позиционирования модуля позиционирования, позволяет предотвратить использование модуля позиционирования для реализации функции связи, влияющей на возможности позиционирования модуля позиционирования.
В соответствии с одним вариантом осуществления первая и вторая модуляции являются фазоимпульсными модуляциями, позволяющими получать импульсы, называемые составными импульсами, содержащие по меньшей мере один единичный импульс, каждый единичный импульс представляется следующей формулой:
где n является индексом, принимающим различные целочисленные значения для первой или второй модуляции,



причем единичные импульсы, содержащиеся в составном импульсе, являются попарно ортогональными, и по меньшей мере один единичный импульс составного импульса, полученного с помощью первой модуляции, является ортогональным каждому единичному импульсу составного импульса, полученного с помощью второй модуляции.
Изобретение обеспечивает универсальный способ получения ортогональных ультраширокополосных импульсов.
В соответствии с одним вариантом осуществления коэффициенты ak,nполиномов получают итеративно путем определения сначала коэффициента полинома наименьшей степени, а затем путем последовательного определения коэффициентов полиномов более высоких степеней.
В соответствии со вторым аспектом изобретения изобретение относится к устройству мобильной связи, включенному в ad hoc сеть, упомянутому устройству мобильной связи, содержащему модуль беспроводной связи для обмена данными с другими устройствами мобильной связи в ad hoc сети и модуль позиционирования, использующий передачу первых импульсов, модулированных в соответствии с первой ультраширокополосной модуляцией, для определения информации, представляющей собой положение упомянутого устройства связи. Упомянутое устройство содержит: средство для получения данных, которые должны быть переданы; средство проверки для проверки возможности передачи модуля беспроводной связи; средство передачи для передачи упомянутых данных в форме вторых импульсов, ортогональных первым импульсам, с использованием модуля позиционирования.
В соответствии с третьим аспектом изобретения изобретение относится к системе связи, содержащей множество устройств мобильной связи в соответствии со вторым аспектом.
В соответствии с четвертым аспектом изобретения изобретение относится к компьютерной программе, содержащей инструкции для реализации устройством способа в соответствии с первым аспектом, когда упомянутая программа исполняется процессором упомянутого устройства.
В соответствии с пятым аспектом изобретение относится к средству хранения, хранящему компьютерную программу, содержащую инструкции для реализации устройством способа в соответствии с первым аспектом, когда упомянутая программа исполняется процессором упомянутого устройства.
Признаки изобретения, упомянутые выше, а также другие станут более понятны после прочтения следующего ниже описания иллюстративного варианта осуществления, данного применительно к прилагаемым чертежам, на которых:
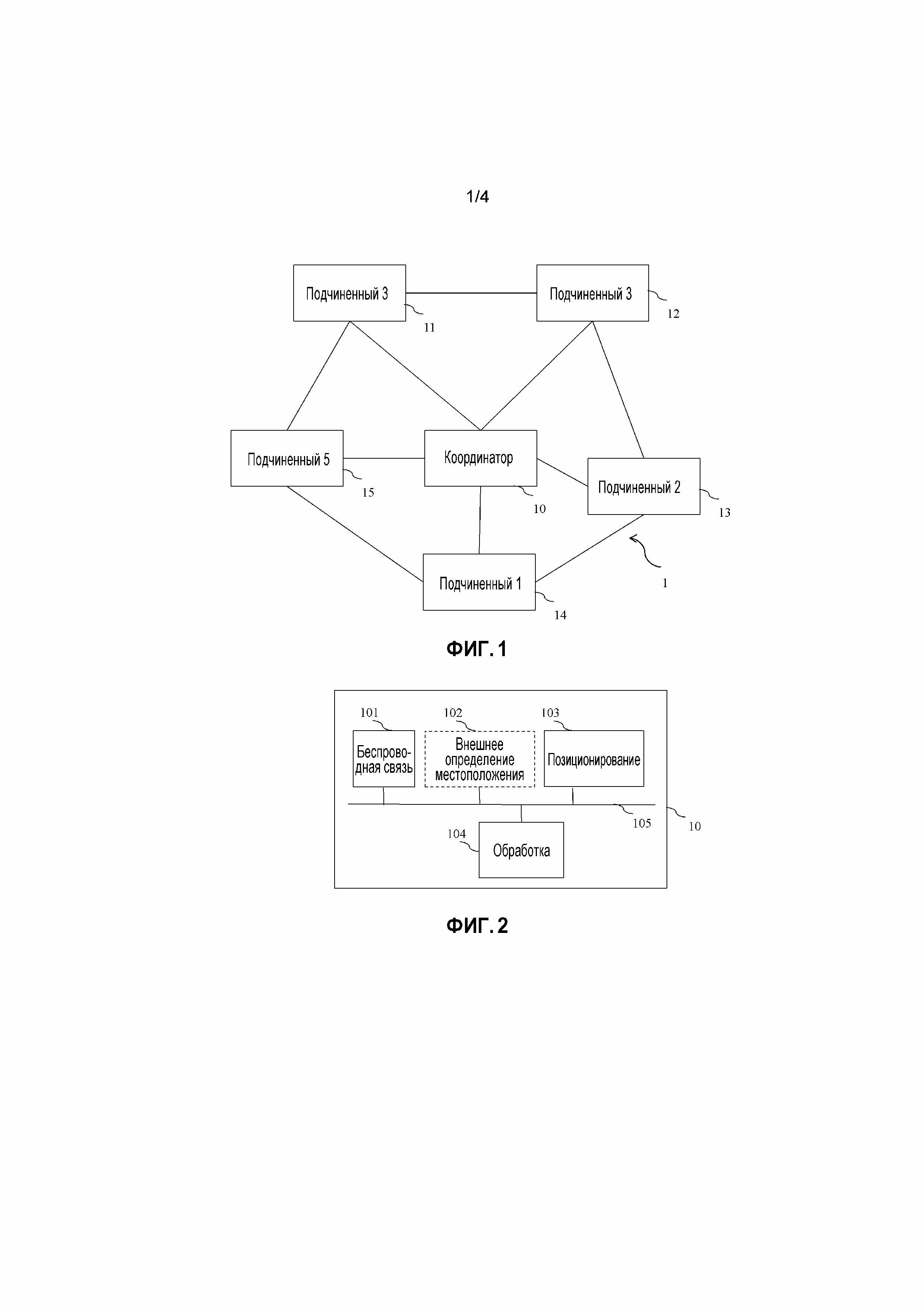
- фиг. 1 схематично изображает ad hoc сеть, содержащую множество устройств связи;
- фиг. 2 схематично изображает устройство связи в соответствии с изобретением;
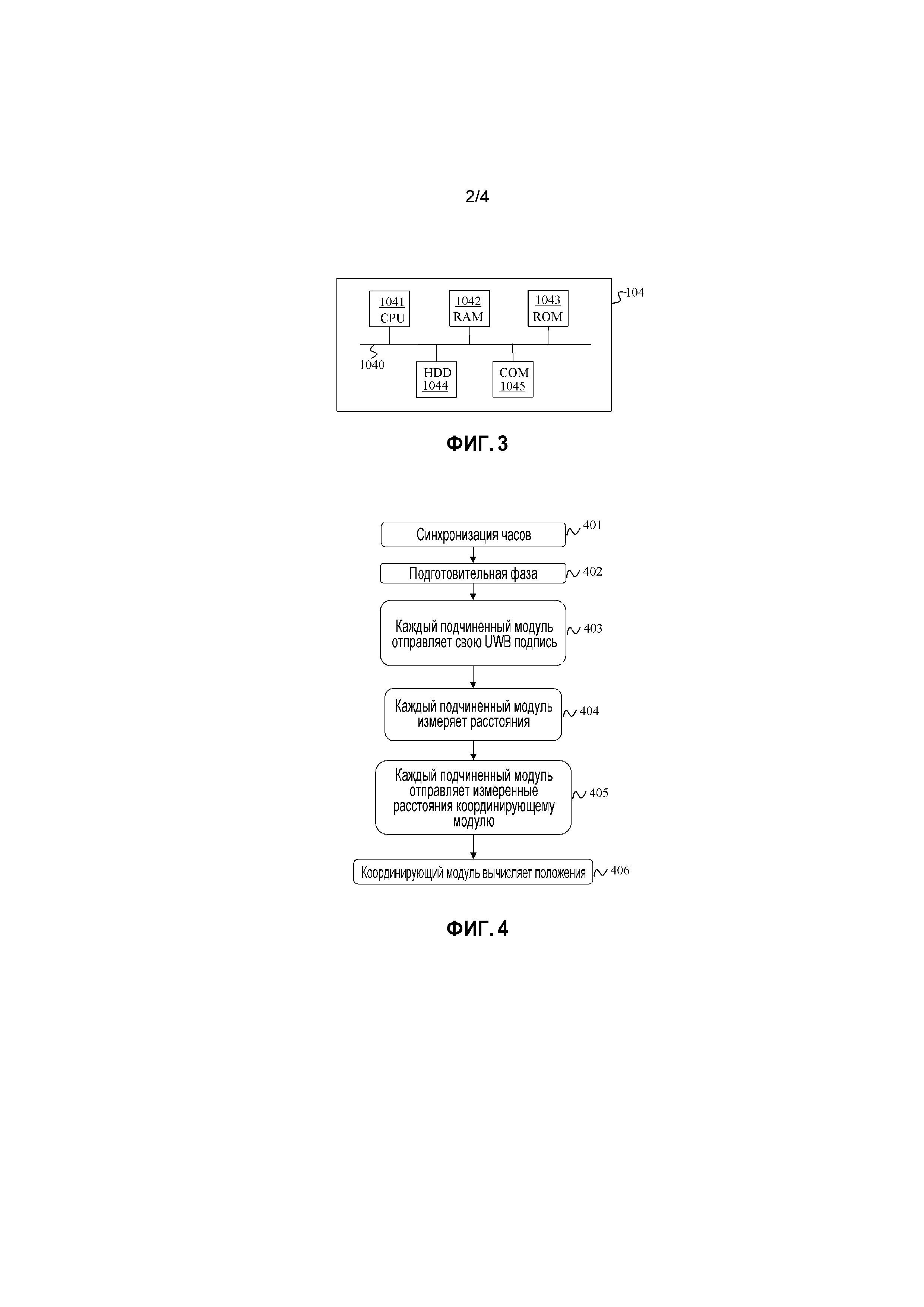
- фиг. 3 схематично изображает пример архитектуры аппаратного обеспечения модуля обработки устройства связи в соответствии с изобретением;
- фиг. 4 схематично изображает способ определения взаимного положения устройств связи в ad hoc сети;
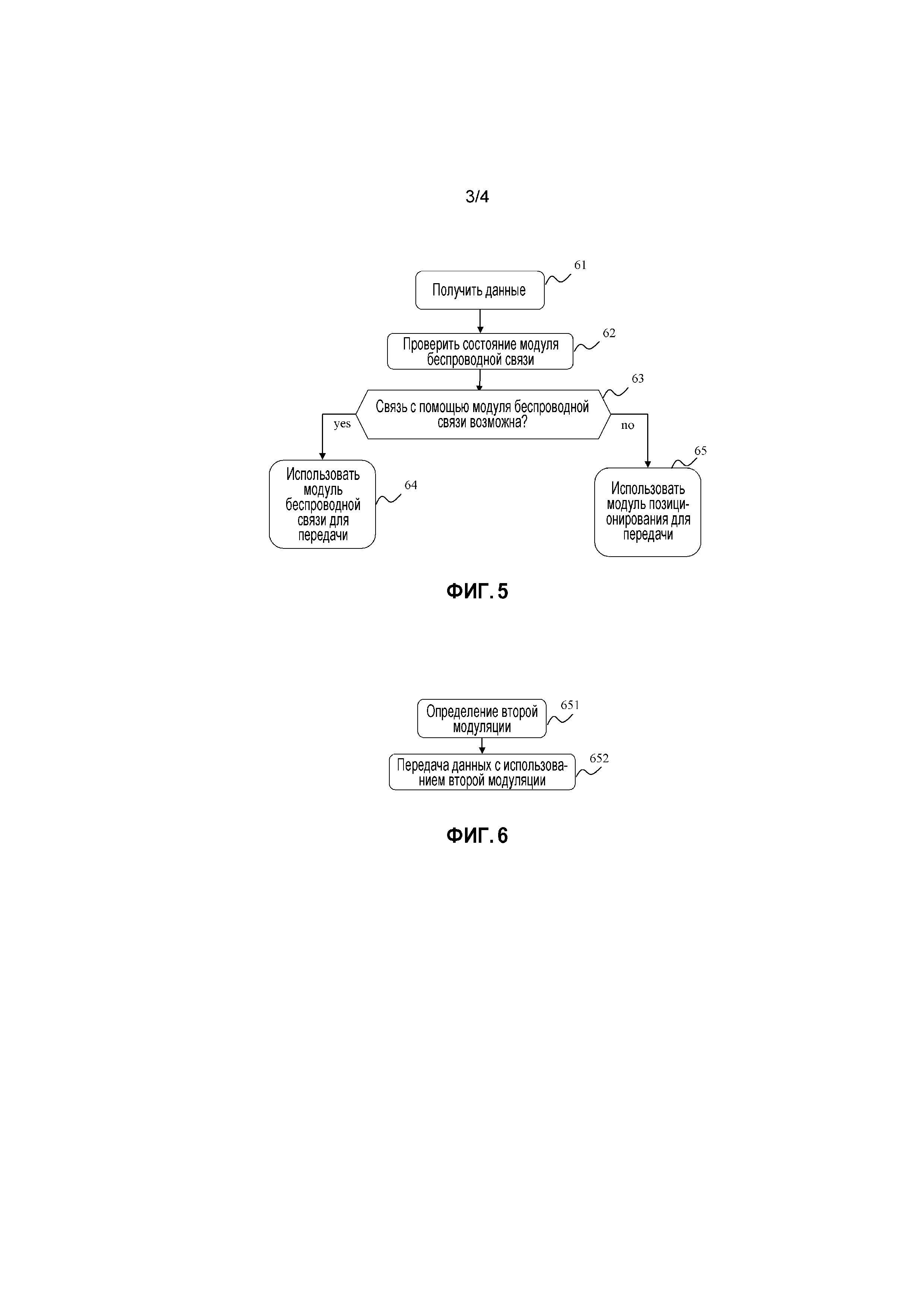
- фиг. 5 схематично изображает способ связи в соответствии с изобретением, реализованный устройством связи в ad hoc сети;
- фиг. 6 схематично изображает пример реализации изобретения, в котором модуль позиционирования реализует функцию связи с использованием UWB модуляции, позволяющей получать UWB импульсы, ортогональные UWB импульсам, используемым для реализации функцию позиционирования; и
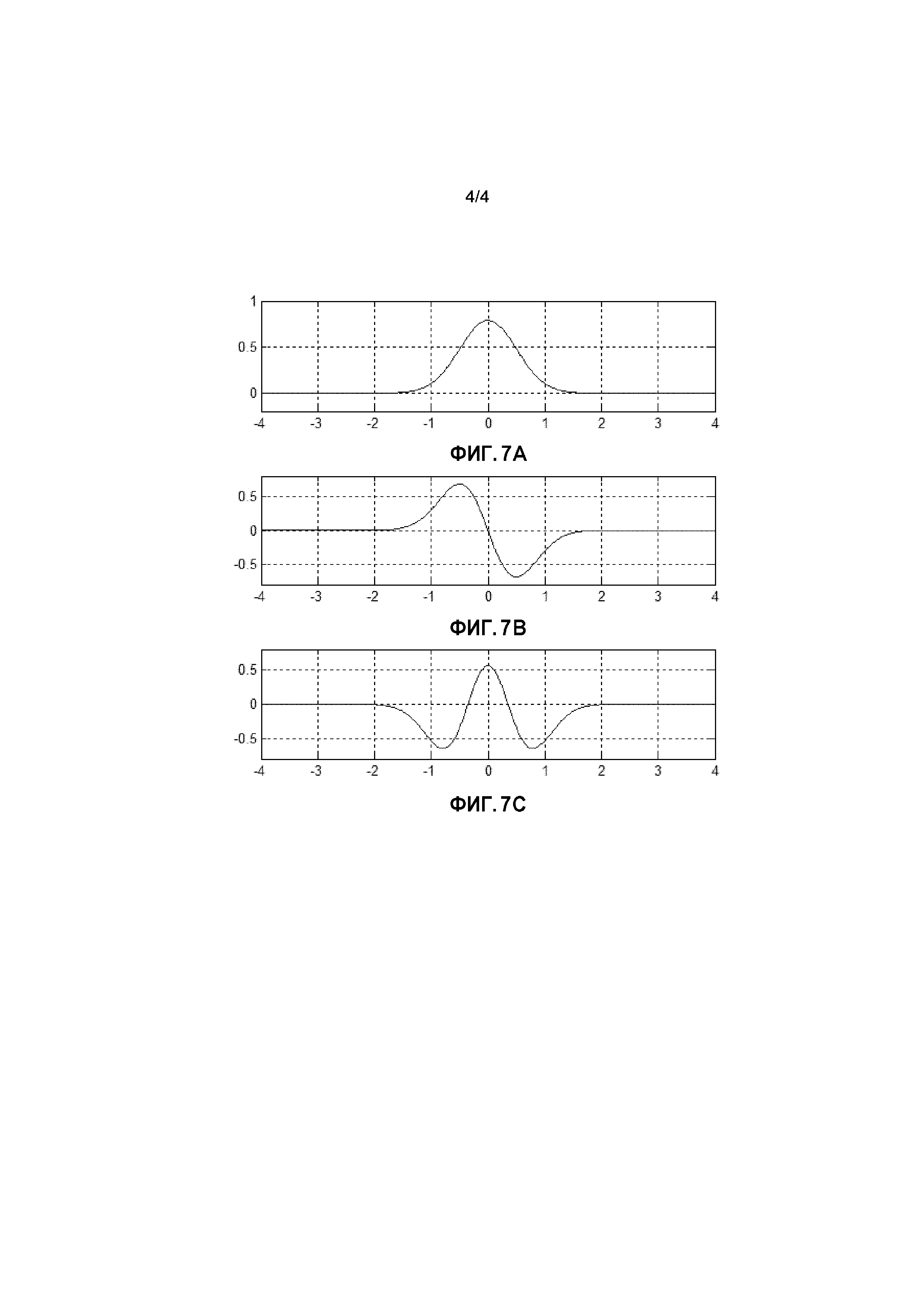
- фиг. 7A, 7B и 7C показывают примеры попарно ортогональных UWB импульсов, используемых в настоящем изобретении.
Изобретение описывается в дальнейшем для случая мобильной ad hoc сети, в которой одно устройство связи является координирующим устройством, а другие устройства связи являются подчиненными устройствами. Изобретение применимо в контексте, в котором роль координирующего устройства не выделяется однозначно одному из устройств связи в ad hoc сети, а напротив, каждое устройство связи в данный момент может стать координирующим устройством, предыдущее координирующее устройство опять становится подчиненным устройством.
Кроме того, настоящее изобретение применимо ко всем производным сетей LSR, то есть, например, сетям, использующим стандарт OSPF (ʺOpen Shortest Path Firstʺ (ʺпервоочередное открытие кратчайших маршрутовʺ)) и оптимизированные версии стандарта OSPF, такие как OLSR (ʺOptimised Link State Routingʺ (ʺоптимизированная маршрутизация с учетом состояния каналовʺ) или MARP (ʺMobility Aware Routing Protocolʺ (ʺпротокол маршрутизации с учетом мобильного доступаʺ)).
Фиг. 1 схематично изображает ad hoc сеть 1, содержащую множество устройств 10, 11, 12, 13, 14 и 15 связи. Каждое устройство 10, 11, 12, 13, 14 и 15 связи является мобильным, так как его носит, например, человек. Устройство 10 связи является координирующим устройством, которое носит, например, координирующий действие человек. Устройства 11-15 связи являются подчиненными устройствами, которые носят, например, подчиненные люди, управляемые в этом действии координирующим человеком.
Фиг. 2 схематично изображает устройство связи согласно изобретению. Здесь мы берем пример модуля 10 связи. Однако все модули 10-15 являются идентичными. Устройство 10 связи содержит соединенные с помощью коммуникационной шины 105 модуль 101 беспроводной связи, модуль 103 позиционирования и модуль 104 обработки. Модуль 101 беспроводной связи является, например, модулем DECT, позволяющим устройству 10 связи осуществлять связь с другими устройствами 11-15 связи. Модуль 103 позиционирования использует UWB модуляцию для получения информации, представляющей собой взаимное положение устройства 10 связи относительно устройств 11-15 связи, в соответствии со способом, который мы описываем применительно к фиг. 4. Далее описывается модуль обработки применительно к фиг. 3.
В одном варианте осуществления устройство 10 связи содержит внешний модуль 102 определения местоположения, такой как модуль GPS, GLONASS или Galileo.
В одном варианте осуществления модуль 101 беспроводной связи точно также может быть модулем Wi-Fi или PHS.
Фиг. 3 схематично изображает архитектуру аппаратного обеспечения модуля 104 обработки.
В соответствии с примером архитектуры аппаратного обеспечения, показанной на фиг. 3, модуль 104 обработки тогда содержит соединенные с помощью коммуникационной шины 1040: процессор или CPU (центральный процессор) 1041; оперативное запоминающее устройство (RAM) 1042; постоянное запоминающее устройство (ROM) 1043; блок хранения данных, такой как жесткий диск или блок чтения носителя данных, такой как блок 1044 чтения SD-карты (безопасной цифровой карты); по меньшей мере один интерфейс 1045 связи, позволяющий модулю 104 обработки осуществлять связь с модулем 101 беспроводной связи, модулем 103 позиционирования и внешним модулем 102 определения местоположения, если он присутствует.
Процессор 1041 может исполнять инструкции, загруженные в RAM 1402 из ROM 1043, из внешней памяти (не показана), из носителя данных (такого как SD-карта) или из сети связи. Когда модуль 104 обработки включается, процессор 1041 может считать инструкции из RAM 1042 и исполнить их. Эти инструкции формируют компьютерную программу, реализующую, с помощью процессора 1041, все или некоторые из алгоритмов и этапов, описанных ниже применительно к фиг. 4, 5 и 6. Функционирование процессора 1041 синхронизируется с помощью внутренних часов, которые не показаны.
Все или некоторые из алгоритмов и этапов, описанных ниже применительно к фиг. 4, 5 и 6, могут быть реализованы в программной форме путем исполнения набора инструкций программируемой машиной, например, DSP (цифровым сигнальным процессором) или микроконтроллером, или реализованы в форме аппаратного обеспечения с помощью машинного или специализированного компонента, например, FPGA (программируемой пользователем вентильной матрицы) или ASIC (специализированной интегральной схемы).
Фиг. 4 схематично изображает способ для определения взаимного положения устройств связи в ad hoc сети. Этот способ реализуется в ad hoc сети 1 для определения взаимного положения устройств 10-15 связи.
Способ начинается с этапа 401 синхронизации внутренних часов модуля 104 обработки каждого устройства 10-15 обработки. Каждый модуль 104 обработки синхронизирует свои внутренние часы с использованием информации, полученной во время беспроводной связи с использованием модуля 101 беспроводной связи, здесь модуля DECT. Для осуществления связи модуль DECT использует режим мультиплексирования, известный как множественный доступ с распределением во времени (TDMA), в течение общего периода связи, известного как кадр. Кадры повторяются циклически и имеют фиксированную длительность, известную каждому модулю 10-15 связи. Каждое устройство 10-15 связи имеет общую точку отсчета

В одном варианте осуществления этапа 401 синхронизации координирующее устройство 10 синхронизирует свои внутренние часы с внутренними часами внешнего модуля 102 определения местоположения, когда он реализован с помощью модуля GPS, GLONASS или Galileo. Таким образом, вся ad hoc сеть синхронизирована по абсолютным часам, заданным внешним модулем 102 определения местоположения.
За этапом 401 синхронизации следует этап 402, называемый подготовительным этапом, во время которого координирующее устройство 10 передает информацию каждому подчиненному устройству 11-15, позволяя каждому подчиненному устройству 11-15 однозначно идентифицировать себя, когда реализуется способ определения взаимного положения. Для этого координирующее устройство 10 передает таблицу идентификации, соответствующую каждому подчиненному устройству. Таблица идентификации, передаваемая подчиненному устройству, содержит следующие элементы: соответствующий идентификатор для упомянутого подчиненного устройства, UWB подпись, соответствующую упомянутому подчиненному устройству, и период задержки при передаче, соответствующий подчиненному устройству.
Идентификатор имеет вид целого числа.
UWB подпись состоит из серии непериодических UWB импульсов. Серия импульсов характеризуется длительностью времени, числом UWB импульсов за упомянутую длительность времени и распределением во времени UWB импульсов за упомянутую длительность времени, которые соответствуют устройству связи и, таким образом, позволяют его распознать.
Период задержки при передаче соответствует длительности времени, отделяющей общую точку отсчета
Во время подготовительной фазы каждое подчиненное устройство 11-15 принимает от координирующего устройства 10 таблицу идентификации для других подчиненных устройств в ad hoc сети.
В конце подготовительной фазы каждое устройство 10-15 связи имеет информацию, позволяющую ему идентифицировать себя в ad hoc сети 1 и идентифицировать другие устройства связи в ad hoc сети 1.
После подготовительной фазы, представленной этапом 402, способ определения взаимного положения входит в рабочую фазу, представленную этапами 403-406.
Во время этапа 403 каждый подчиненный модуль отправляет свою подпись. Эта передача выполняется в кадре, каждый подчиненный модуль придерживается порядка передачи подписей, заданного периодами задержки при передаче.
Во время этапа 404, когда устройство связи, называемое приемным устройством, принимает подпись, оно идентифицирует устройство связи, порождающее передачу этой подписи, называемое передающим устройством, и измеряет расстояние, отделяющее передающее устройство от приемного устройства. Во время этапа 404 каждое устройство 10-15 связи в ad hoc сети 1 сохраняет расстояния, которые оно смогло измерить.
На этапе 405 каждый подчиненный модуль 11-15 передает каждое расстояние, которое он смог измерить, координирующему модулю 10 с использованием модуля 101 беспроводной связи.
Во время этапа 406 координирующее устройство определяет взаимные положения подчиненных устройств по расстояниям, которые оно приняло, в соответствии со способом, аналогичным триангуляции. В примере ad hoc сети 1 это определение, реализованное модулем 104 обработки, может быть сделано, например, следующим образом.
Модуль 104 обработки задает ортогональную систему координат (O, x, y) с центром в позиции координирующего устройства 10. Пусть


Тогда может быть записана следующая система уравнений:















Все расстояния

В одном варианте осуществления координирующий модуль 10 использует свой внешний модуль 102 определения местоположения для определения его абсолютного положения и вычисляет абсолютные положения каждого подчиненного устройства 11-15 по определенному абсолютному положению и взаимным положениям, которые он вычислил.
В одном варианте осуществления координирующее устройство ретранслирует относительные или абсолютные положения, которые оно определило, каждому подчиненному устройству 11-15. Таким образом каждое подчиненное устройство 11-15 знает относительное или абсолютное положение каждого устройства связи 10-15 в ad hoc сети 1.
В одном варианте осуществления каждое подчиненное устройство последовательно передает множество подписей, чтобы позволить каждому устройству связи, принимающему эту подпись, уточнить свое измерение расстояния, например, путем усреднения множества измеренных расстояний.
Фиг. 5 схематично изображает способ связи в соответствии с изобретением, реализованный устройством 10, 11, 12, 13, 14 или 15 связи в ad hoc сети 1. Здесь мы берем пример подчиненного устройства 11. Однако устройства 10, 12, 13, 14 и 15 реализуют тот же самый способ.
На этапе 61 модуль 104 обработки получает данные, которые должны быть переданы, а также информацию, представляющую собой одно или несколько устройств связи, для которых предназначаются эти данные. Данные, которые должны быть переданы, могут быть, например, аудиоданными, изображениями, видео и т.д.
На этапе 62 модуль 104 обработки передает запрос модулю 101 беспроводной связи для определения возможностей связи модуля беспроводной связи с устройством или устройствами связи, для которых предназначаются данные. Когда оно принимает упомянутый запрос, модуль 101 беспроводной связи определяет свои возможности связи с каждым целевым устройством связи. Для этого, например, модуль 101 беспроводной связи передает тестовое сообщение каждому устройству связи. Каждое целевое устройство связи, принимающее тестовое сообщение, отвечает путем отправки подтверждения получения модулю 101 беспроводной связи, содержащего информацию, представляющую собой качество приема сообщения. Информация, представляющая собой качество приема сообщения, может быть, например, измерением RSSI (received signal strength indication (показатель мощности принятого сигнала)). Модуль 101 беспроводной связи затем передает информацию, представляющую собой качество приема, которую он получил, модулю 104 обработки.
Во время этапа 63 модуль 104 обработки определяет по информации, представляющей собой качества приема, возможна ли связь с использованием модуля 101 беспроводной связи. Таким образом, для каждого целевого устройства связи модуль 104 обработки определяет, когда целевое устройство связи передало информацию, представляющую собой качество связи ниже предварительно заданного порога, или упомянутое целевое устройство связи не передало подтверждение получения, что связь с использованием модуля 101 беспроводной связи невозможна. Модуль 104 обработки затем решает использовать модуль 103 позиционирования для осуществления связи с упомянутым целевым устройством связи. Затем осуществляется связь с упомянутым целевым устройством связи во время этапа 65. Далее мы подробно описываем два примера реализации этапа 65, один из этих примеров подробно описан применительно к фиг. 6.
С другой стороны, если во время этапа 63 целевое устройство связи передало информацию, представляющую собой качество связи выше или равное предварительно заданному порогу, устройство 104 обработки решает использовать модуль 101 беспроводной связи для осуществления связи с упомянутым целевым устройством связи. Связь с использованием модуля 104 беспроводной связи реализуется во время этапа 64.
В одном варианте осуществления до осуществления связи с использованием модуля 103 позиционирования между подчиненным устройством 11 и одним из устройств 10 и 12-15 связи, с которым связь с использованием модуля 101 беспроводной связи невозможна, называемым недоступным устройством, устройство 104 обработки подчиненного устройства 11 определяет, возможна ли связь с использованием модуля позиционирования. Для этого модуль 104 обработки определяет, было ли, в контексте реализации способа определения взаимного положения устройств связи, описанного применительно к фиг. 4, определено расстояние между подчиненным устройством 11 и недоступным устройством. Для этого, например, во время этапа 404, когда устройство связи приняло подпись и оно смогло определить расстояние, отделяющее его от устройства связи, которое отправило подпись, устройство связи, которое приняло подпись, передает подпись устройству, которое отправило подпись. Таким образом каждое устройство связи, которое отправило подпись, знает, с каким устройством связи оно может осуществлять связь с помощью модуля 103 позиционирования.
Основной функцией модуля 103 позиционирования устройства 10, 11, 12, 13, 14 или 15 связи является обеспечение средства позиционирования для упомянутого устройства связи. Когда модуль 103 позиционирования используется для выполнения функции связи, реализация этой функции не должна мешать функции позиционирования. Таким образом, чтобы две функции могли сосуществовать, реализация двух функций в модуле позиционирования использует различные UWB модуляции, позволяющие управлять ортогональными UWB импульсами.
Получить ортогональные UWB импульсы можно различными способами.
В одном варианте осуществления каждая функция модуля позиционирования использует соответствующую UWB антенну, UWB антенна, используемая в функции позиционирования, имеет поляризацию, ортогональную UWB антенне, используемой для функции связи. Каждая антенна, например, реализована с помощью плоской антенны ("микрополосковой"), излучающий элемент которой является, как правило, квадратной или прямоугольной проводящей поверхностью, отделенной от проводящей отражающей поверхности листом диэлектрического материала. Эти две антенны в достаточной мере разнесены друг от друга для того, чтобы уменьшить их взаимное влияние. Функция позиционирования может использовать, например, антенну, имеющую горизонтальную поляризацию, а функция связи может использовать антенну, имеющую вертикальную поляризацию.
В одном варианте осуществления каждая функция модуля позиционирования использует соответствующую UWB модуляцию. UWB модуляция, используемая в функции позиционирования, позволяет получать составные UWB импульсы, ортогональные составным UWB импульсам, полученным с помощью UWB модуляции, используемой в функции связи. Составной UWB импульс означает UWB импульс, содержащий по меньшей мере один единичный импульс UWB. Составной импульс, содержащий множество единичных импульсов UWB, является результатом конкатенации упомянутых единичных UWB импульсов.
Фиг. 7A, 7B и 7C показывают примеры единичных UWB импульсов, попарно ортогональных, используемых в настоящем изобретении.
Горизонтальные оси представляют время, выраженное в наносекундах, а вертикальные оси представляют собой амплитуды, выраженные в вольтах или в предварительно определенных единицах напряжения.
Фиг. 7a показывает единичный UWB импульс

где K является коэффициентом нормировки,

Фиг. 7b показывает единичный UWB импульс

Фиг. 7c показывает единичный UWB импульс


Единичные UWB импульсы


В общем виде единичный UWB импульс с индексом n может быть представлен с помощью следующей формулы:
где
Ортогональность двух единичных UWB импульсов может быть выражена в форме нулевого скалярного произведения.
Скалярное произведение


где

Пусть имеется следующая формула:

где

Пусть

где a и b являются константами, например,


Если n четное, тогда мы имеем:

В противном случае

Из этого результата скалярное произведение

Для




Для













Из чего:
Для





















Таким образом
И:
Таким образом могут быть определены коэффициенты полиномов, используемых при генерации ортогональных единичных UWB импульсов.
Для m>2 имеется m+1 уравнений. Первое уравнение выражает тот факт, что скалярное произведение функции



Фиг. 6 схематично изображает пример реализации изобретения, в котором модуль позиционирования реализует функцию связи с использованием UWB модуляции, позволяющей получать UWB импульсы, ортогональные UWB импульсам, используемым для реализации функции позиционирования.
Во время этапа 651 модуль обработки для реализации функции связи получает UWB модуляцию, позволяющую получать составные UWB импульсы, ортогональные составным UWB импульсам, используемым для реализации функции позиционирования.
В одном варианте осуществления функция позиционирования модуля 103 позиционирования использует, например, модуляцию, генерирующую единичные UWB импульсы

В одном варианте осуществления каждая функция модуля 103 позиционирования использует составной импульс, возникающий в результате конкатенации по меньшей мере двух единичных импульсов, попарно ортогональных, взятый из единичных импульсов
На этапе 652 данные, которые должны быть переданы, передаются модулем 103 позиционирования с использованием UWB модуляции, позволяющей получать составные UWB импульсы, ортогональные составным импульсам, используемым для реализации функции позиционирования.
Варианты осуществления, использующие антенны, имеющие ортогональные полярности, и модуляции, позволяющие генерировать ортогональные составные UWB импульсы, могут быть объединены. В этом случае функция связи может использовать антенну, имеющую первую полярность, для передачи первых составных UWB импульсов, а функция позиционирования может использовать антенну, имеющую вторую полярность, ортогональную первой полярности, для передачи вторых составных UWB импульсов, ортогональных первым составным UWB импульсам.
Реферат
Изобретение относится к области беспроводной связи, в частности к связи в ad hoc сети, и предназначено для обеспечения связи на большом расстоянии. Изобретение содержит координирующее устройство мобильной связи, называемое координирующим устройством, и множество подчиненных устройств мобильной связи, называемых подчиненными устройствами, причем каждое устройство связи содержит модуль беспроводной связи и модуль позиционирования, использующий передачу первых импульсов, модулированных в соответствии с первой ультраширокополосной модуляцией, для определения информации, представляющей собой положение упомянутого устройства связи. Способ содержит, когда он реализуется устройством связи, этапы, на которых: получают (61) данные, которые должны быть переданы; проверяют (62) возможность передачи модуля беспроводной связи; когда модуль беспроводной связи не позволяет передавать данные, используют (65) модуль позиционирования для передачи упомянутых данных в форме вторых импульсов, ортогональных первым импульсам. 5 н. и 4 з.п. ф-лы, 9 ил.
Формула



Документы, цитированные в отчёте о поиске
Отображение объектов сети на мобильных устройствах на основании геопозиции
Комментарии