Оценка расстояния с использованием звуковых сигналов - RU2576343C2
Код документа: RU2576343C2
Чертежи







Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к оценке расстояний до объектов и, в частности, но не исключительно, к характеризации звуковых сред на основе оценки расстояний.
УРОВЕНЬ ТЕХНИКИ
Автоматизированное определение расстояний является важным для многих применений. Например, звуковая среда значительно влияет на характеристики системы громкоговорителей, и акустика помещения, например, значительно влияет на пространственное впечатление, которое можно обеспечить с помощью системы пространственного звуковоспроизведения. Поэтому, чтобы обеспечить наилучшее пространственное воспроизведение, важно, чтобы система звуковоспроизведения была должным образом откалибрована для определенной звуковой среды. Поскольку невозможно учесть заранее каждую возможную комбинацию размера помещения, размещения акустической системы, положения слушателя и т.д., на практике можно предоставить только ограниченное количество предварительно заданных вариантов. Поэтому надлежащая калибровка системы звуковоспроизведения должна осуществляться с помощью оборудования на месте. Чтобы оптимизировать звуковоспроизведение, предпочтительно должны быть известны геометрия помещения, положение прослушивания и размещение устройства воспроизведения. Хотя можно измерить эти данные вручную, это представляло бы нежелательный объем работ на стороне пользователя и было бы подвержено ошибке пользователя. Если геометрию помещения можно измерить автоматически, то оптимизация может быть автоматической и не содержать ошибку пользователя. Такая геометрия помещения может определяться из измерений расстояния до объектов в помещении, например стен, и поэтому практичная система для определения таких расстояний до объектов очень полезна.
Предложено определять расстояния до стен на основе измерений направленных звуковых сигналов. WO200466673A1 раскрывает систему, в которой массив традиционных громкоговорителей и по меньшей мере один микрофон используются для калибровки звуковой панели, где множество пространственных каналов формируется из одного громкоговорителя, используя массив громкоговорителей и канализируемое излучение звуковых сигналов.
Раскрытая система использует массив традиционных громкоговорителей для создания пучка направленного звука, который направлен на стену. Отраженный звук регистрируется микрофоном, и разновременность между излучением звука и улавливанием звука используется для определения расстояния до отражающего объекта. Этот подход очень похож на стандартный гидролокатор. Использование массива традиционных громкоговорителей для этой системы обладало несколькими недостатками. Массив традиционных громкоговорителей может создавать только остронаправленные звуковые пучки в ограниченном диапазоне частот, определенном шириной массива и расстоянием между громкоговорителями. Ограниченная полоса пропускания приводит к раскрытой системе, использующей одночастотный испытательный тональный сигнал для калибровки, что может привести, например, к сниженному отношению сигнал/шум по сравнению с сигналами с большей полосой пропускания. Раскрытая система также может быть предрасположена к артефактам равносигнальной зоны, которые могут приводить к ложным результатам.
Другая проблема, с которой сталкивается использование массива традиционных громкоговорителей, состоит в том, что широкая апертура, необходимая для острой направленности, также приводит к большому размеру пятна у звукового пучка, что уменьшает разрешение измерительной системы. Чтобы решить эту проблему, WO200466673A1 предлагает использовать фокусирующий алгоритм для уменьшения размера пятна пучка. Однако, чтобы сфокусировать пучок, расстояние до отражающего объекта должно быть известно заранее, то есть это требует, чтобы уже было известно расстояние, которое нужно измерить. По существу, необходима итеративная процедура оптимизации, чтобы сфокусировать пучок до подходящего размера пятна и идентифицировать местоположение стены с подходящей точностью. Это затратно в показателях как вычислительной мощности, так и времени измерения/настройки.
Системы обнаружения дальности на основе ультразвука также использованы для определения расстояния до стен. Эти системы излучают ультразвуковой сигнал в направлении стены и измеряют время, которое проходит до того, как ультразвуковой сигнал принимается обратно. Расстояние тогда можно определить соответствующим половине круговой задержки для ультразвукового сигнала. Однако такие системы ультразвуковой дальнометрии требуют, чтобы отражающая поверхность была перпендикулярна ультразвуковому пучку, и очень чувствительны к отклонениям от этого. Действительно, во многих случаях даже небольшое отклонение от перпендикуляра приводит к измеренным сигналам, соответствующим траектории с многократными отражениями (например, от большего количества стен), посредством этого приводя к ошибочным результатам, и соответственно, например, ошибочной калибровке системы звуковоспроизведения. Поэтому системы ультразвуковой дальнометрии имеют склонность к непрактичности для многих стационарных систем калибровки, в которых дальномерное устройство практически нельзя разместить и направить непосредственно на объект, до которого измеряется расстояние. В частности, они имеют склонность требовать ручного управления и являются неподходящими для многих автоматизированных систем, где точное положение и направление от дальномерного устройства до объектов неизвестно.
Поэтому была бы полезна усовершенствованная система для определения расстояния, и в частности, была бы полезна система, допускающая повышенную гибкость, упрощенную реализацию, упрощенную работу, повышенную точность, повышенную гибкость в геометрическом отношении между системой и объектом, улучшенную пригодность для автоматической дальнометрии и калибровки, улучшенную направленность, улучшенную фокусировку и/или улучшенную производительность.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Соответственно, изобретение стремится предпочтительно смягчить, ослабить или устранить один или несколько вышеупомянутых недостатков, поодиночке или в любом сочетании.
В соответствии с особенностью изобретения предоставляется устройство для определения расстояния до объекта, содержащее: генератор тестового сигнала для формирования ультразвукового тестового сигнала путем модулирования тестового сигнала звуковой частоты в ультразвуковом сигнале; параметрический громкоговоритель для излучения ультразвукового тестового сигнала в первом направлении; датчик звуковой частоты для формирования зарегистрированного сигнала звуковой частоты, содержащего демодулированный отраженный сигнал звуковой частоты, происходящий из ультразвукового тестового сигнала; и схему оценки расстояния для формирования оценки расстояния для расстояния от параметрического громкоговорителя до объекта в ответ на зарегистрированный сигнал звуковой частоты и оценку отраженного звукового сигнала для тестового сигнала звуковой частоты.
Изобретение может обеспечить улучшенную и/или упрощенную оценку расстояния. Измерение расстояния во многих вариантах осуществления может быть более подходящим для автоматической оценки расстояния и/или может быть нечувствительным к изменениям в геометрических характеристиках сценария измерения. В частности, изобретение может обеспечить улучшенную оценку расстояния для сценариев, в которых направление от датчика/параметрического громкоговорителя не перпендикулярно поверхности объекта. Во многих сценариях можно добиться более точного направленного измерения расстояния, в частности можно добиться меньшего размера пятна пучка наряду с сохранением низкой сложности.
Схема оценки расстояния может формировать оценку расстояния в ответ на относительный момент зарегистрированного сигнала звуковой частоты и тестового сигнала звуковой частоты.
Диапазон звуковых частот может находиться ниже 20 кГц, при этом ультразвуковой сигнал имеет частоту выше 20 кГц. Зарегистрированный сигнал звуковой частоты может соответствовать зарегистрированному звуку в пределах некоторого интервала в полосе частот от 0 Гц до 15 кГц и обычно может включать в себя звук из интервала, который включает в себя частоты ниже 10 кГц или 5 кГц.
Во многих вариантах осуществления тестовый сигнал звуковой частоты преимущественно может иметь ширину полосы частот не менее 500 Гц, а в некоторых вариантах осуществления преимущественно может иметь ширину полосы частот не менее 1 кГц, 2 кГц или даже 5 кГц. Во многих сценариях это может обеспечить более точную оценку и часто может обеспечить улучшенную оценку связанных характеристик, например угла отражающей поверхности или размера отражающего объекта.
Тестовый сигнал звуковой частоты может быть, например, сигналом с качанием частоты (например, логарифмическим), последовательностью максимальной длины или случайным шумовым сигналом с ограниченной полосой. В некоторых вариантах осуществления тестовый сигнал звуковой частоты может быть, например, однотональным сигналом.
Параметрический громкоговоритель и датчик звуковой частоты обычно могут совмещаться. Такое совместное размещение может, например, соответствовать менее десятой части расстояния, которое нужно оценить, и во многих вариантах осуществления может быть меньше 50 см, 25 см или даже 10 см.
Ультразвуковой тестовый сигнал может излучаться направленно, например, с помощью направленного пучка, имеющего затухание 6 дБ при угле менее 10° или 20° для частотного интервала от 3 кГц до 10 кГц или даже для частотного интервала от 1500 Гц до 15 кГц. Угол главного лепестка может быть больше при меньших частотах и может составлять, например, менее 40° при 500 Гц.
Схема оценки расстояния может быть выполнена с возможностью определения оценки расстояния в ответ на момент самого раннего максимума корреляции между зарегистрированным сигналом звуковой частоты и тестовым сигналом звуковой частоты после порогового значения времени.
Это может обеспечить практичное и точное определение расстояния. Пороговое значение времени может быть заранее установленной временной задержкой и обычно может соответствовать длине траектории, которая больше расстояния от параметрического громкоговорителя до датчика звуковой частоты.
Оценка отраженного звукового сигнала в некоторых вариантах осуществления может быть такой же, как тестовый сигнал звуковой частоты, или может быть, например, его измененной или обработанной версией, например, определенной для компенсации влияний нелинейной демодуляции.
В соответствии с необязательным признаком изобретения схема оценки расстояния выполнена с возможностью формирования оценки угла между первым направлением и отражающей поверхностью объекта в ответ на характеристику частотного распределения у зарегистрированного сигнала звуковой частоты.
Это может предоставить дополнительную информацию, которая может обеспечить улучшенные и/или расширенные функциональные возможности. Например, при использовании для определения или оценивания геометрии звуковой среды это может обеспечить более точное определение геометрии и соответственно улучшенное звуковоспроизведение на его основе.
В частности, схема оценки расстояния может быть выполнена с возможностью формирования оценки угла, так что более высокая относительная концентрация высокочастотной энергии указывает более близкий к перпендикулярному угол. Схема оценки расстояния может быть выполнена с возможностью смещения оценки угла к углу 90° для увеличивающейся концентрации энергии в направлении более высоких частот. Это может обеспечить подходящую оценку угла во многих вариантах осуществления.
В соответствии с необязательным признаком изобретения схема оценки расстояния выполнена с возможностью формирования оценки размера для объекта в ответ на характеристику частотного распределения у зарегистрированного сигнала звуковой частоты.
Это может предоставить дополнительную информацию, которая может обеспечить улучшенные и/или расширенные функциональные возможности. Например, при использовании для определения или оценивания геометрии звуковой среды это может обеспечить более точное определение геометрии и соответственно улучшенное звуковоспроизведение на его основе. Дополнительно или в качестве альтернативы это может обеспечить или помочь в идентификации объекта в звуковой среде.
В частности, схема оценки расстояния может быть выполнена с возможностью формирования оценки размера, так что более высокая относительная концентрация низкочастотной энергии указывает больший размер. Схема оценки расстояния может быть выполнена с возможностью смещения оценки размера к более крупным размерам для увеличивающейся концентрации энергии в направлении более низких частот. Это может обеспечить подходящую оценку размера отражающего объекта во многих вариантах осуществления.
В соответствии с необязательным признаком изобретения схема оценки расстояния выполнена с возможностью определения самого раннего максимума корреляции между зарегистрированным сигналом звуковой частоты и оценкой отраженного звукового сигнала после порогового значения времени и формирования оценки расстояния при многократном отражении в ответ на момент последующего максимума корреляции между зарегистрированным сигналом звуковой частоты и оценкой отраженного звукового сигнала.
Это может предоставить дополнительную информацию, которая может обеспечить улучшенные и/или расширенные функциональные возможности. Например, при использовании для определения или оценивания геометрии звуковой среды это может обеспечить более точное определение геометрии и соответственно улучшенное звуковоспроизведение на его основе.
В соответствии с необязательным признаком изобретения устройство дополнительно содержит схему звуковой среды, выполненную с возможностью: изменения первого направления; приема оценок расстояния для разных значений первого направления; и определения геометрии звуковой среды в ответ на оценки расстояния.
Этот подход может быть особенно полезным для определения геометрии звуковой среды, например геометрии помещения. Улучшенную точность можно получить во многих вариантах осуществления, посредством этого обеспечивая улучшенную адаптацию системы звуковоспроизведения и соответственно улучшенное звуковоспроизведение с помощью этой системы звуковоспроизведения. В частности, можно добиться улучшенного пространственного звуковоспроизведения для систем пространственного звука.
В соответствии с необязательным признаком изобретения параметрический громкоговоритель содержит массив ультразвуковых преобразователей, и схема звуковой среды выполнена с возможностью управления значением первого направления путем управления по меньшей мере одним из относительной задержки, фазы и усиления для ультразвуковых преобразователей.
Это может обеспечить особенно выгодный подход и может, например, снизить сложность, упростить работу и/или обеспечить более точное управление первым направлением. Процессор звуковой среды может реализовать алгоритм формирования пучка для массива ультразвуковых преобразователей.
В соответствии с необязательным признаком изобретения схема оценки расстояния выполнена с возможностью формирования оценки расстояния при многократном отражении в ответ на сравнение зарегистрированного сигнала звуковой частоты и оценки отраженного звукового сигнала, причем оценка расстояния при многократном отражении указывает протяженность траектории от параметрического динамика до датчика звуковой частоты, содержащей множество отражений; и где схема звуковой среды дополнительно выполнена с возможностью определения геометрии звуковой среды в ответ на оценку расстояния при многократном отражении.
Это может обеспечить более точное определение геометрии и соответственно улучшенное звуковоспроизведение на его основе.
В соответствии с необязательным признаком изобретения схема звуковой среды выполнена с возможностью определения времени реверберации для звуковой среды и определения геометрии звуковой среды в ответ на это время реверберации.
Это может обеспечить более точное определение геометрии и соответственно улучшенное звуковоспроизведение на его основе.
В соответствии с необязательным признаком изобретения схема звуковой среды выполнена с возможностью приема дополнительного зарегистрированного сигнала звуковой частоты, содержащего инициированный пользователем звук, и определения положения прослушивания в ответ на дополнительный зарегистрированный сигнал звуковой частоты и геометрию звуковой среды.
Это может предоставить дополнительную информацию, которая может обеспечить улучшенную адаптацию системы звуковоспроизведения, в частности может обеспечить оптимизацию к положению прослушивания. Инициированный пользователем звук может быть предполагаемым инициированным пользователем звуком, и подход может определить положение прослушивания на основе предположения дополнительного зарегистрированного сигнала звуковой частоты, содержащего инициированный пользователем звук, и оцененной геометрии звуковой среды.
Дополнительный зарегистрированный сигнал звуковой частоты может формироваться датчиком звуковой частоты и может быть таким же, как зарегистрированный сигнал звуковой частоты, или может быть, например, другим сигналом, предоставленным другим датчиком.
В соответствии с необязательным признаком изобретения устройство выполнено с возможностью итеративного определения оценок расстояния для соответствующих значений первого направления, и схема звуковой среды выполнена с возможностью оценивания геометрии звуковой среды в ответ на динамические изменения в оценках расстояния для соответствующих значений первого направления.
В некоторых вариантах осуществления устройство может быть выполнено с возможностью итеративного определения оценок расстояния для звуковой среды, и процессор звуковой среды выполнен с возможностью оценивания геометрии звуковой среды в ответ на динамические изменения в оценках расстояния.
Принятие во внимание динамических изменений может обеспечить улучшенную оценку звуковой среды. Соответствующие направления могут быть практически одинаковыми направлениями.
В соответствии с необязательным признаком изобретения устройство выполнено с возможностью итеративного определения оценок расстояния для соответствующих значений первого направления, и схема звуковой среды выполнена с возможностью оценивания положения прослушивания в звуковой среде в ответ на динамические изменения в оценках расстояния для соответствующих значений первого направления.
В некоторых вариантах осуществления устройство может быть выполнено с возможностью итеративного определения оценок расстояния для звуковой среды, и процессор звуковой среды выполнен с возможностью оценивания положения прослушивания в звуковой среде в ответ на динамические изменения в оценках расстояния.
Принятие во внимание динамических изменений может обеспечить особенно эффективную оценку положения прослушивания. Соответствующие направления могут быть практически одинаковыми направлениями.
В соответствии с необязательным признаком изобретения предоставляется система пространственного звуковоспроизведения, содержащая ранее описанное устройство, и в которой схема звуковой среды выполнена с возможностью адаптации характеристики пространственного звуковоспроизведения в ответ на геометрию звуковой среды.
Изобретение может предоставить особенно полезную систему пространственного звуковоспроизведения с улучшенной адаптацией к определенной среде использования.
В соответствии с необязательным признаком изобретения схема звуковой среды выполнена с возможностью управления направлением направленного звука по меньшей мере для одного пространственного канала в ответ на геометрию звуковой среды.
Изобретение может обеспечить особенно выгодный подход для управления направленным излучением звука для пространственных каналов. Пространственный канал, в частности, может быть каналом окружения (боковым или задним). Подход особенно полезен для направления пространственных каналов, которые предназначены для достижения положения прослушивания через одно или несколько отражений, так что пространственный канал воспринимается происходящим из иного положения, чем положение громкоговорителя, излучающего сигнал.
В соответствии с необязательным признаком изобретения параметрический динамик выполнен с возможностью воспроизведения звука по меньшей мере для одного пространственного канала.
Подход может позволить параметрическому громкоговорителю предоставить пространственный канал, посредством этого позволяя точно направить его малым пучком, чтобы обеспечить точное пространственное восприятие. Ответственное и точное направленное излучение такого сигнала можно автоматически приспособить к определенной звуковой среде без необходимости дополнительных громкоговорителей. Один и тот же параметрический громкоговоритель может соответственно использоваться для разных, но связанных функций, чтобы обеспечить улучшенное пространственное восприятие наряду с сохранением низкой стоимости.
В соответствии с особенностью изобретения предоставляется способ определения расстояния до объекта, содержащий: формирование ультразвукового тестового сигнала путем модулирования тестового сигнала звуковой частоты в ультразвуковом сигнале; излучения ультразвукового тестового сигнала в первом направлении из параметрического громкоговорителя; регистрации сигнала звуковой частоты с помощью датчика звуковой частоты, причем зарегистрированный сигнал звуковой частоты содержит демодулированный отраженный сигнал звуковой частоты, происходящий из ультразвукового тестового сигнала; и формирования оценки расстояния для расстояния от параметрического громкоговорителя до объекта в ответ на зарегистрированный сигнал звуковой частоты и оценку отраженного звукового сигнала для тестового сигнала звуковой частоты.
Эти и другие особенности, признаки и преимущества изобретения станут очевидными и будут разъяснены со ссылкой на вариант (варианты) осуществления, описываемые ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения будут описываться только в качестве примера со ссылкой на чертежи, на которых
Фиг. 1 - иллюстрация компоновки системы динамиков для системы объемного звука;
Фиг. 2 - иллюстрация примера компоновки системы динамиков для системы объемного звука;
Фиг. 3 - иллюстрация примера компоновки системы динамиков для системы объемного звука;
Фиг. 4 иллюстрирует пример элементов в устройстве для определения расстояния до объекта в соответствии с некоторыми вариантами осуществления изобретения;
Фиг. 5 иллюстрирует пример сценария измерения для устройства для определения расстояния до объекта в соответствии с некоторыми вариантами осуществления изобретения;
Фиг. 6 иллюстрирует пример корреляционной характеристики для сценария измерения для устройства для определения расстояния до объекта в соответствии с некоторыми вариантами осуществления изобретения;
Фиг. 7 и 8 иллюстрирует пример сценария ультразвукового измерения расстояния для системы ультразвуковой дальнометрии в соответствии с известным уровнем техники;
Фиг. 9 иллюстрирует пример сценария измерения для устройства для определения расстояния до объекта в соответствии с некоторыми вариантами осуществления изобретения;
Фиг. 10 иллюстрирует пример элементов системы пространственного звуковоспроизведения в соответствии с некоторыми вариантами осуществления изобретения; и
Фиг. 11 иллюстрирует пример определения геометрии помещения с помощью системы пространственного звуковоспроизведения в соответствии с некоторыми вариантами осуществления изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Нижеследующее описание сосредоточено на вариантах осуществления изобретения, применимых к калибровке системы пространственного звуковоспроизведения на основе геометрии звуковой среды, определенной из измерений расстояния. Однако нужно будет принять во внимание, что изобретение не ограничивается этим применением, а может применяться во многих других сценариях и ко многим другим приложениям.
Фиг. 1 иллюстрирует компоновку системы динамиков для традиционной пятиканальной системы пространственного звуковоспроизведения, например системы домашнего кинотеатра. Система содержит центральный динамик 101, предоставляющий центральный передний канал, левый передний динамик 103, предоставляющий левый передний канал, правый передний динамик 105, предоставляющий правый передний канал, левый тыловой динамик 107, предоставляющий левый тыловой канал, и правый тыловой динамик 109, предоставляющий правый тыловой канал. Пять динамиков 101-109 вместе предоставляют пространственное звуковое впечатление в положении 111 прослушивания и позволяют слушателю в этом месте получать окружающее и многонаправленное звуковое впечатление. Во многих системах домашнего кинотеатра система дополнительно может включать в себя сабвуфер для канала низкочастотных эффектов (LFE).
Требование к расположению громкоговорителей сбоку или сзади положения прослушивания обычно считается невыгодным, так как это не только требует расположения дополнительных громкоговорителей в неудобных положениях, но также требует их подключения к источнику возбуждения, обычно усилителю мощности домашнего кинотеатра. В типичной компоновке системы необходимо, чтобы провода шли из положений 107, 109 окружных громкоговорителей к блоку усилителя, который обычно располагается ближе к передним динамикам 101, 103, 105. Это особенно невыгодно для изделий типа систем домашнего кинотеатра, которые стремятся иметь широкую привлекательность и применение в средах, которые не оптимизированы или не предназначены для звукового впечатления.
Фиг. 2 иллюстрирует пример измененной компоновки системы динамиков. В этом примере передние громкоговорители, а именно левый передний громкоговоритель 103, центральный громкоговоритель 101 и правый передний громкоговоритель 105, предоставляют аудиограмму спереди от положения 111 прослушивания. Однако в системе из Фиг. 2 сигналы объемного звука не предоставляются отдельными громкоговорителями, установленными сзади от пользователя, а предоставляются громкоговорителями 201, 203, установленными спереди от положения 111 прослушивания. В конкретном примере левый окружной динамик 201 располагается рядом с левым передним динамиком 103, а правый окружной динамик 203 располагается рядом с правым передним динамиком 105.
В примере окружные динамики 201, 203 выполнены с возможностью излучения звукового сигнала 205, 207, который отражается боковыми стенами 209, 211 и задней стеной 213, чтобы достичь положения 111 прослушивания из направления сзади от слушателя. Таким образом, тыловые окружные динамики 201, 203 предоставляют объемные сигналы 205, 207, которые кажутся слушателю возникающими сзади. Этот эффект достигается путем излучения тыловых звуковых сигналов 205, 207 таким образом, что они отражаются стенами 209, 211, 213. В конкретном примере сигналы 205, 207 объемного звука достигают положения прослушивания преимущественно посредством отражений от двух стен, а именно боковых стен 209, 211 и задней стены 213. Однако нужно будет принять во внимание, что другие варианты осуществления и сценарии могут включать в себя меньше или больше отражений. Например, объемные сигналы 205, 207 могут излучаться для достижения положения 111 прослушивания с помощью однократного отражения от боковой стены 209, 211, посредством этого предоставляя воспринимаемый виртуальный источник звука сбоку от пользователя.
В примере Фиг. 2 каждый пространственный канал излучается собственным отдельным динамиком. Описанный подход обеспечивает действенное окружающее впечатление наряду с разрешением располагать окружные динамики 201, 203 спереди от пользователя, и в частности, совмещать или располагать рядом с одним из передних динамиков 101, 103, 105. Однако это также позволяет использовать один и тот же динамик для воспроизведения более одного из пространственных каналов. Таким образом, во многих вариантах осуществления окружные динамики 201, 203 также могут использоваться для воспроизведения одного из передних каналов.
В конкретном примере левый окружной динамик 201 также может воспроизводить левый передний канал, а правый окружной динамик 203 также может воспроизводить правый передний канал. Однако, поскольку левый и правый передние каналы должны доставляться непосредственно в положение прослушивания (по прямой траектории), так что они кажутся идущими спереди, то есть непосредственно из положения динамика, передний канал воспроизводится в ином направлении, чем канал окружения.
Таким образом, можно убрать соответственно левый передний динамик 103 и правый передний динамик 105, и вместо этого можно использовать левый окружной динамик 201 и правый окружной динамик 203, приходя к системе на Фиг. 3. Пространственные системы из Фиг. 2 и 3 соответственно основываются на направленном излучении звука по меньшей мере левым окружным динамиком 201 и правым окружным динамиком 203. Этого можно достичь, например, с использованием направленных головок громкоговорителя, наклоненных в нужном направлении, но чаще можно достичь с использованием массивов преобразователей, пучком которых можно управлять. Таким образом, каждый из левого окружного динамика 201 и правого окружного динамика 203 может содержать множество преобразователей, которые возбуждаются по-разному взвешенными (фаза и/или амплитуда) и/или задержанными версиями управляющих сигналов, чтобы обеспечить нужное формирование пучка и, соответственно, направленность.
Все системы, кроме того, будут обеспечивать пространственное звуковое впечатление в положении 111 прослушивания, которое сильно зависит от геометрии звуковой среды. В частности, геометрия помещения влияет на воспринимаемый пространственный звук. В частности, пространственное восприятие каналов окружения из Фиг. 2 и 3 достигается с помощью отражений от стен и соответственно очень сильно зависит от определенной геометрии помещения.
Соответственно, важно откалибровать и адаптировать систему звуковоспроизведения к определенной звуковой среде, в частности к геометрии помещения. Этого часто можно добиться вручную или полуавтоматически, требуя от пользователя поместить микрофон в положение прослушивания и выполняя специальный процесс калибровки. Однако это может быть сложным, трудоемким, запутывающим и непрактичным для многих типичных пользователей.
В дальнейшем будет описываться система, которая может формировать автоматические оценки геометрии помещения/звуковой среды, что позволяет калибровать систему звуковоспроизведения для определенной среды. Система основывается на измерениях расстояния, которые используют сочетание ультразвуковых и звуковых сигналов и измерений.
Описанный подход использует параметрический громкоговоритель для излучения модулированного ультразвукового сигнала в заданном направлении. Таким образом, ультразвуковой передатчик (в виде ультразвукового громкоговорителя) проецирует остронаправленный пучок ультразвука с высокой интенсивностью, модулированный тестовым сигналом звуковой частоты. Когда ультразвук распространяется через воздух, тестовый сигнал звуковой частоты демодулируется для формирования остронаправленного пучка звука. Когда этот звуковой пучок сталкивается с препятствием, например стеной, потолком или крупным объектом, звук слышимой частоты отражается в широком диапазоне углов и впоследствии регистрируется датчиком звуковой частоты (например, стандартным звуковым микрофоном), размещенным около передатчика. Разновременность между передачей и приемом отраженного сигнала затем используется для идентификации расстояния до отражающего/рассеивающего объекта.
Этот подход может использоваться для выполнения сканирования по набору углов, посредством этого позволяя, например, вычислить расстояние от устройства до стен и/или потолка помещения и построить геометрическую модель помещения. Используя эту информацию, систему звуковоспроизведения затем можно регулировать для оптимизации воспроизведения звука для любого заданного помещения и положения прослушивания. Нижеследующее описание будет сосредоточено на определении двумерной геометрии помещения путем определения расстояния и положений стен помещения, но нужно будет принять во внимание, что подход в равной степени может быть применим к определению трехмерной геометрии помещения. В частности, нужно будет принять во внимание, что описанный подход в равной степени подходит, например, для определения расстояния до потолка помещения.
Фиг. 4 подробнее иллюстрирует пример измеряющей системы. Система содержит генератор 401 тестового сигнала, который формирует ультразвуковой тестовый сигнал путем модулирования тестового сигнала звуковой частоты в ультразвуковом сигнале. Генератор 401 тестового сигнала соединяется с параметрическим громкоговорителем 403, который излучает модулированный ультразвуковой тестовый сигнал.
Параметрический громкоговоритель является звуковым устройством, которое использует нелинейные свойства воздуха для демодуляции слышимых частот из ультразвукового сигнала несущей частоты с высокой интенсивностью. Ультразвуковой сигнал несущей частоты обычно является ультразвуковой несущей с очень короткой длиной волны. Когда ультразвуковая акустическая волна проецируется из преобразователя с размером гораздо больше длины волны звука, создается очень узкий пучок ультразвука. Когда ультразвук распространяется через воздух, звуковой сигнал демодулируется из ультразвукового сигнала несущей частоты. В частности, любая нелинейность в траектории звука может действовать как демодулятор, посредством этого воссоздавая исходный звуковой тестовый сигнал, который использовался для модуляции ультразвукового сигнала несущей частоты. Такая нелинейность может возникать автоматически в траектории передачи. В частности, воздух в качестве передающей среды по своей природе проявляет нелинейную характеристику, что приводит к тому, что ультразвук становится слышимым. Таким образом, в примере нелинейные свойства самого воздуха вызывают демодуляцию звука из ультразвукового сигнала высокой интенсивности.
Демодулированный звуковой сигнал также образует остронаправленный пучок в результате плотного группирования первичной ультразвуковой несущей. Острая направленность источника звука позволяет направлять слышимый звук в очень точные местоположения, что весьма полезно для точной оценки расстояния. Параметрический громкоговоритель, кроме того, является компактным и обладает малым размером пятна по своей природе без необходимости дополнительного фокусирования.
Хотя параметрический громкоговоритель может направить звуковой пучок в любую точку помещения с очень высокой точностью, как только пучок сталкивается с неким объектом, составляющие слышимой частоты рассеиваются по всему помещению. Если микрофон размещается совмещенно с параметрическим преобразователем, то он обнаружит отраженные звуковые сигналы. Эта система выглядит аналогичной традиционному гидролокатору ультразвукового обнаружения дальности на основе ультразвукового передатчика и приемника. Ключевое отличие состоит в том, что ультразвуковой гидролокатор передает и принимает ультразвук, тогда как система из Фиг. 4 передает ультразвук и принимает сигнал диапазона звуковых частот. Ультразвук отражается от стены исключительно зеркально. Если стена перпендикулярна передатчику, то сильный сигнал будет отражен обратно к приемнику. Когда стена становится все больше и больше параллельной передатчику, сигнал отражается от приемника. Соответственно, отношение сигнал/шум ухудшается, и также имеется потенциальный риск, что последующие отражения ультразвукового пучка могут привести к сильному сигналу на приемнике, вызывая неправильные показания.
Новый способ передает ультразвуковой пучок, но принимает сигнал слышимой частоты. Высокочастотные составляющие имеют склонность к рассеиванию более зеркально, чем низкочастотные составляющие, в действительности низкочастотные составляющие рассеиваются почти ненаправленно. Так как значительная часть отраженного звукового сигнала отражается почти ненаправленно, звук всегда отражается обратно к приемнику независимо от угла, который образует преобразователь со стеной. Новый способ поэтому всегда способен точно определить кратчайшее расстояние до стены или отражающего объекта при заданном угле пучка.
В системе из Фиг. 4 выходом параметрического громкоговорителя 403 является ультразвуковая несущая, модулированная с тестовым сигналом слышимой частоты. Во время передачи от громкоговорителя к стене звук демодулируется из ультразвукового сигнала несущей частоты посредством нелинейного взаимодействия, чтобы сформировать слышимый звуковой пучок. Таким образом, остронаправленный и узкий звуковой сигнал формируется и излучается в направлении стен.
На первом препятствии, встреченном звуковым пучком, сигнал звуковой частоты рассеивается относительно равномерно в помещении и соответственно также отражается обратно к параметрическому громкоговорителю 403.
Система из Фиг. 4 дополнительно содержит датчик 405 звуковой частоты, который формирует зарегистрированный сигнал звуковой частоты. В характерном примере датчик 405 звуковой частоты является стандартным микрофоном звуковой частоты с полосой пропускания, например, от ниже 1 кГц до выше 8 кГц. Таким образом, микрофон 405 улавливает диапазон звуковых частот (по меньшей мере его часть) и формирует соответствующий электрический сигнал. Отражение/рассеивание объекта (стены) приводит к тому, что демодулированный звуковой тестовый сигнал отражается к микрофону 405, и соответственно зарегистрированный сигнал звуковой частоты содержит демодулированный отраженный сигнал звуковой частоты, получающийся в результате атмосферной демодуляции модулированного ультразвукового тестового сигнала.
Микрофон 405 соединяется со схемой или процессором 407 оценки расстояния, который принимает зарегистрированный сигнал звуковой частоты. Он дополнительно соединяется с генератором 401 тестового сигнала, от которого принимает оценку отраженного звукового сигнала для тестового сигнала звуковой частоты. В частности, оценка отраженного звукового сигнала может определяться соответствующей звуковому сигналу, который получается в результате нелинейной демодуляции тестового сигнала звуковой частоты в воздухе. Таким образом, разница между оценкой отраженного звукового сигнала и тестовым сигналом звуковой частоты может отражать нелинейности траектории звука (и в частности, демодуляции).
Схема 407 оценки расстояния затем переходит к формированию оценки расстояния для расстояния от параметрического громкоговорителя 403 до объекта в ответ на сравнение зарегистрированного сигнала звуковой частоты и оценки отраженного звукового сигнала, и в частности, путем сравнения их относительного момента.
Нижеследующий подход для краткости и ясности сначала будет описываться для сценария, где эти нелинейные эффекты незначительны, то есть где оценка отраженного звукового сигнала является такой же, как тестовый сигнал звуковой частоты. Таким образом, в таком варианте осуществления в схему или процессор 407 оценки расстояния непосредственно подается проверяемая звуковая полоса.
Система может определить расстояние на основе измеренного времени задержки, соответствующего длине траектории от параметрического громкоговорителя 403 до микрофона 405. В частности, измеряя разновременность между переданным сигналом и отраженным сигналом, можно использовать скорость звука для вычисления расстояния между системой и отражающим объектом/стеной в том направлении.
Параметрический громкоговоритель 403 и микрофон 405 могут, в частности, совмещаться, и в этом случае измеренная длина траектории будет соответствовать удвоенному расстоянию. Нужно будет принять во внимание, что когда увеличивается расстояние между параметрическим громкоговорителем 403 и микрофоном 405, это расстояние и траектория между параметрическим громкоговорителем 403 и микрофоном 405 будут образовывать треугольник, позволяя вычислить расстояние с использованием простых геометрических зависимостей (см., например, Фиг. 5). Во многих вариантах осуществления расстояние между параметрическим громкоговорителем 403 и микрофоном 405 настолько мало, что можно пренебречь влиянием на оцененное расстояние, и расстояние вычисляется просто как длина траектории, разделенная на два. Обычно этого можно достичь, если расстояние между параметрическим громкоговорителем 403 и микрофоном 405 составляет менее 5-10% минимального расстояния, которое нужно измерить.
Нижеследующее описание для краткости и ясности будет предполагать, что параметрический громкоговоритель 403 и микрофон 405 полностью совмещены.
Чтобы определить расстояние, процессор 407 расстояния может использовать, в частности, методику на основе корреляции, поскольку такие методики проявляют особенную надежность для извлечения информации о расстоянии из шумных измеренных данных.
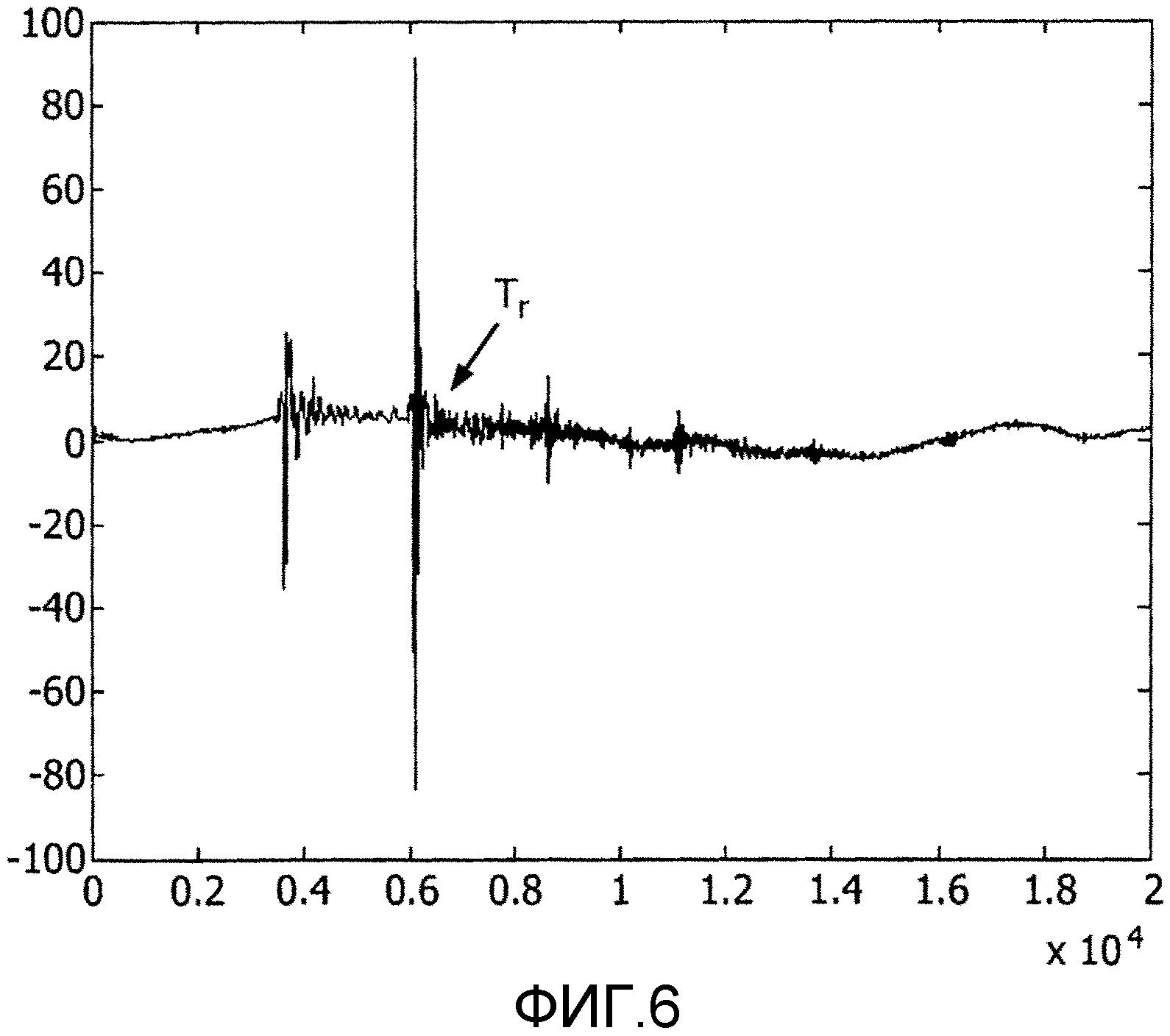
В частности, взаимная корреляция сформированного звукового тестового сигнала с зарегистрированным звуковым тестовым сигналом из микрофона 405 приведет к максимуму взаимной корреляции, соответствующему временной выборке Tr, в которой каждый эхо-сигнал принимается обратно в микрофоне 405, то есть траектория, содержащая одно или несколько отражений, приведет к достижению звуковым тестовым сигналом микрофона с соответствующей задержкой. Таким образом, максимумы могут обнаруживаться и использоваться для определения оценок длины траектории. Обычно будет несколько максимумов в импульсной характеристике, указывающей многократные отражения, как указано, например, в примере из Фиг. 6. Первый максимум, T1, соответствует первому отражению. Это может использоваться для предоставления информации о расстоянии до стен. Дополнительные максимумы могут соответствовать многократным отражениям и могут использоваться для определения траекторий таких многократных отражений. Это может использоваться, например, для моделирования помещения более высокого порядка.
С помощью преобразования объема выборки у первого максимума T1 во временной индекс (путем деления на частоту fs дискретизации), а затем умножения на скорость звука (приблизительно 340 мс-1) можно вывести оценку общей длины траектории:

Фиг. 6 иллюстрирует измеренную импульсную характеристику, полученную в типичном помещении с использованием тестового сигнала с логарифмическим качанием и параметрического динамика. Первые 4000 выборок показывают "ложный импульс" из-за связи между параметрическим динамиком 403 и микрофоном 405. Он задерживается приблизительно на 2600 выборок из-за предварительной обработки, включенной в электронику возбуждения параметрической АР. Вычитание индекса первого "ложного максимума" из последующих максимумов дает фактическое время пробега/задержку на траектории для траектории звука. Первый большой максимум приблизительно на 6000 выборках обусловлен первым отражением. Отражения более высокого порядка обуславливают следующие меньшие максимумы.
В примере процессор 407 расстояния определяет оценку расстояния в ответ на момент максимума корреляции. Максимум корреляции может выбираться, например, как Nый максимум корреляции в измеренной корреляционной характеристике, где N может быть равно 1, 2, …. Во многих вариантах осуществления первый максимум корреляции соответствует прямой связи, и оценка расстояния может определяться в ответ на момент второго максимума корреляции. Таким образом, оценка расстояния может определяться в ответ на момент первого максимума, который возникает после заданного порогового значения времени/задержки. Эта задержка может определяться на основе самой корреляционной характеристики, например может задаваться соответствующей времени первого (непосредственно связанного) максимума корреляции или может устанавливаться в заранее установленную временную задержку, например, соответствующую задержке больше максимального предполагаемого расстояния между параметрическим громкоговорителем 403 и микрофоном 405, однако же меньше задержки, соответствующей удвоенному минимальному расстоянию, которое нужно измерить.
Аналогичным образом длина траектории для многократных отражений может определяться из момента максимумов корреляции, соответствующих значениям N=3, 4, 5 … (или 2, если прямая связь достаточно ослаблена) или отражениям после заданной задержки.
Подход может обеспечить улучшенную оценку расстояния во многих сценариях. В частности, подход может преодолеть или уменьшить проблемы равносигнальной зоны, размера пятна, ограничений полосы пропускания и размера динамика (массива), ассоциированные с использованием массива традиционных громкоговорителей. Более того, этот подход может предоставить подход с низкой сложностью, который может обеспечить очень направленное излучение звука для использования в определении расстояния наряду с сохранением уменьшенных размеров и низкой стоимости/сложности.
Кроме того, подход не склонен испытывать трудности, обычно ассоциированные с системами ультразвуковой дальнометрии. Такие системы ультразвуковой дальнометрии могут быть эффективны в ситуациях, когда ультразвуковое дальномерное устройство перпендикулярно отражающей стене, например, как проиллюстрировано на Фиг. 7. Однако, когда отражающая поверхность находится под углом к дальномерному устройству, ультразвуковой тестовый сигнал не отражается обратно к дальномерному устройству, как проиллюстрировано на Фиг. 8. В лучшем случае это приводит к сниженному отношению сигнал/шум, а также имеется потенциальный риск, что последующие отражения ультразвукового пучка могут привести к сильному сигналу на приемнике. Таким образом, имеется высокая вероятность того, что это приводит к неточному или ошибочному измерению расстояния, которое вместо этого может соответствовать множеству отражений. Соответственно, ультразвуковая дальнометрия не подходит для гибких систем и часто не пригодна, например, для систем автоматической калибровки помещения, но требующих ручного вмешательства и ручной операции.
В отличие от этого описанный подход передает ультразвуковой пучок, но принимает сигнал слышимой частоты. Высокочастотные составляющие имеют склонность к рассеиванию более зеркально, чем низкочастотные составляющие, и в действительности низкочастотные составляющие рассеиваются почти ненаправленно. Это используется в системе из Фиг. 4, где значительная часть отраженного звукового сигнала отражается почти ненаправленно, как проиллюстрировано на Фиг. 9. Соответственно, звук всегда отражается обратно к микрофону 405 независимо от угла, который параметрический динамик 403 образует со стеной. Подход поэтому более устойчив к изменениям угла и, как правило, всегда сможет точно определить кратчайшее расстояние до отражающего объекта при заданном угле пучка. Таким образом, система особенно подходит для автоматических измерений расстояния, например, используемых при определении геометрии звуковой среды или помещения.
Говоря подробнее, генератор 401 тестового сигнала содержит генератор 409 ультразвука, который формирует ультразвуковой сигнал, который в определенном случае является одиночной ультразвуковой несущей. Ультразвуковой сигнал имеет ширину полосы частот, которая включает в себя звуки в ультразвуковом диапазоне, и в частности, которые превышают 20 кГц. В определенном примере ультразвуковой генератор 409 соответственно формирует ультразвуковой сигнал, который является однотональным с частотой выше 20 кГц.
Генератор 401 тестового сигнала дополнительно содержит генератор 411 звуковой частоты, который формирует тестовый сигнал звуковой частоты. Тестовый сигнал звуковой частоты содержит частотные составляющие ниже 15 кГц, а обычно частотные составляющая ниже 10 кГц. Во многих вариантах осуществления тестовый сигнал звуковой частоты содержит частотные составляющие ниже 5 кГц или 2 кГц. Во многих вариантах осуществления более низкие частоты могут быть выгодны, так как отражение в большей степени является ненаправленным для более низких частот. Однако более высокие частоты могут обеспечивать полезную направленность падающего звукового пучка на отражающую поверхность. Соответственно, точный частотный состав тестового сигнала звуковой частоты может зависеть от требований и предпочтений отдельного варианта осуществления.
Тестовый сигнал звуковой частоты в некоторых вариантах осуществления может быть однотональным сигналом. В других вариантах осуществления тестовый сигнал звуковой частоты может иметь увеличенную ширину полосы частот и может быть, например, сигналом белого или розового шума, и может формироваться, например, как последовательность максимальной длины. В качестве другого примера тестовый сигнал звуковой частоты может быть (логарифмическим) качанием одного тона. Конкретный сигнал, используемый в отдельном варианте осуществления, может выбираться удовлетворяющим определенным предпочтениям и требованиям.
Генератор 411 звуковой частоты дополнительно соединяется с процессором 407 расстояния, который принимает копию тестового сигнала звуковой частоты для использования при определении расстояния, и в частности, для использования в корреляции. Во многих вариантах осуществления тестовый сигнал звуковой частоты, который передается, может быть не таким же, как используется для корреляции. Например, во многих вариантах осуществления оценка отраженного звукового сигнала может использоваться вместо тестового сигнала звуковой частоты, который модулируется в ультразвуковом сигнале.
В частности, генератор звуковой частоты может формировать тестовый сигнал звуковой частоты, а затем переходить к применению предполагаемых нелинейностей к сигналу, чтобы сформировать оценку отраженного звукового сигнала, которая затем подается в процессор 407 расстояния и используется для оценки расстояния и корреляции в частности.
Эквивалентно генератор 411 звуковой частоты может сначала сформировать начальный звуковой сигнал, который подходит для корреляции, выполняемой процессором 407 расстояния. Затем он может перейти к формированию тестового сигнала звуковой частоты путем выполнения предварительной компенсации начального звукового сигнала перед модуляцией ультразвукового сигнала, где предварительная компенсация стремится компенсировать нелинейные эффекты траектории звука. Таким образом, в таком примере сформированный вначале звуковой сигнал используется в качестве оценки отраженного звукового сигнала, а предварительно компенсированная версия корреляционного звукового сигнала используется в качестве тестового сигнала звуковой частоты.
Разные подходы могут использоваться для такой предварительной компенсации в зависимости от определенного варианта осуществления. По существу нелинейная демодуляция приводит к искаженной версии входного звукового сигнала, и чтобы добиться чистого звукового сигнала, соответствующего нужному звуковому сигналу, используемому при декорреляции, обратный нелинейный фильтр может применяться к корреляционному звуковому тестовому сигналу. Во время демодуляции в воздухе нелинейное искажение, созданное предварительной компенсацией, по меньшей мере частично будет уравновешено.
Различные конкретные подходы для операций обратной нелинейной фильтрации, чтобы удалить составляющие нелинейного искажения из выхода звука у параметрического громкоговорителя, будут известны специалисту в данной области техники и не будут дополнительно описываться в этом документе для краткости. Примеры подходящих подходов можно найти, например, в Lee, K. and Gen, W. "Bandwidth-Efficient Recursive Pth-Order Equalisation for correcting Baseband Distortion in Parametric Loudspeakers" IEEE Trans. on Audio Speech and Language Proc. Vo14, No2. March 2006, и Kite, T.D., Post J.T. and Hamilton M.F. "Parametric Array in Air: Distortion Reduction by Preprocessing" Proc 16th Int. Cong. Acoust., Vol. 2. June 1998.
В некоторых вариантах осуществления звуковой тестовый сигнал преимущественно может иметь полосу пропускания не менее 500 Гц, 1 кГц, 2 кГц, 5 кГц или 8 кГц.
Использование такого широкополосного сигнала может применяться, например, для выведения дополнительной информации об отражающем объекте.
Например, авторы изобретения поняли, что спектральный сигнал, принятый в микрофоне 405, будет зависеть от угла между отражающей поверхностью и звуковым пучком. В частности, когда поверхность объекта перпендикулярна, высокочастотные составляющие будут отражаться строго к микрофону. Однако, когда пучок по отношению к поверхности объекта становится все больше и больше параллельным, будет уменьшаться высокочастотный спектр отраженного пучка, поступающий в микрофон 405.
В системе из Фиг. 4 процессор 407 расстояния выполнен с возможностью дополнительного формирования оценки угла между направлением ультразвукового пучка и отражающей поверхностью объекта в ответ на характеристику частотного распределения у зарегистрированного сигнала звуковой частоты из микрофона 405. Сигнал микрофона в некоторых вариантах осуществления может использоваться напрямую (например, если помещение во всем остальном достаточно тихое) либо, по возможности, может сначала обрабатываться (например, может фильтроваться).
В конкретном примере процессор 407 расстояния выполнен с возможностью формирования оценки угла, так что более высокая относительная концентрация высокочастотной энергии указывает более близкий к перпендикулярному угол. Процессор 407 расстояния смещает оценку угла к углу 90° для увеличивающейся концентрации энергии в направлении более высоких частот.
В качестве характерного примера процессор 407 расстояния может измерять энергию в высокочастотном интервале и низкочастотном интервале для тестового сигнала звуковой частоты и для зарегистрированного сигнала микрофона. Затем можно сформировать отношение относительного затухания в каждой полосе частот. Тогда угол может определяться в зависимости от этого отношения. Например, отношение может использоваться для выполнения поиска в таблице заранее установленных значений, устанавливающих связь этого отношения с углами. Заранее установленные значения могут формироваться с помощью специального процесса измерения, например, как часть фазы производства или проектирования.
Авторы изобретения дополнительно поняли, что спектральный сигнал, принятый в микрофоне 405, будет зависеть от размера отражающей поверхности. На самом деле обнаружено, что частотная характеристика отражения к микрофону будет зависеть от размера и формы объекта, от которого рассеивается пучок. Если объект крупный по сравнению с длиной звуковой волны у модулированного сигнала, то большая доля сигнала будет отражена обратно к микрофону 405 (на той слышимой частоте). Если объект небольшой по сравнению с длиной волны, то меньше сигнала будет отражено обратно к микрофону 405. На основе частотной характеристики сигнала, зарегистрированного в микрофоне, процессор 407 расстояния может сформировать оценку размера для объекта.
В системе из Фиг. 4 процессор 407 расстояния соответственно выполнен с возможностью дополнительного формирования оценки размера для объекта в ответ на характеристику частотного распределения у зарегистрированного сигнала звуковой частоты. Сигнал микрофона в некоторых вариантах осуществления может использоваться напрямую (например, если помещение во всем остальном достаточно тихое) либо, по возможности, может сначала обрабатываться (например, может фильтроваться).
В конкретном примере процессор 407 расстояния выполнен с возможностью формирования оценки размера, так что более высокая относительная концентрация низкочастотной энергии указывает более крупный размер. Процессор 407 расстояния смещает оценку размера к большей оценке размера для увеличивающейся концентрации энергии в направлении более низких частот.
В качестве характерного примера процессор 407 расстояния может измерять энергию в высокочастотном интервале и низкочастотном интервале для тестового сигнала звуковой частоты и для зарегистрированного сигнала микрофона. Затем можно сформировать отношение относительного затухания в каждой полосе частот. Тогда оценка размера может определяться в зависимости от этого отношения. Например, отношение может использоваться для выполнения поиска в таблице заранее установленных значений, устанавливающих связь этого отношения с размерами. Заранее установленные значения могут формироваться с помощью специального процесса измерения, например, как часть фазы производства или проектирования.
Система из Фиг. 4 может использоваться, в частности, для управления и автоматической адаптации пространственного звуковоспроизведения. Фиг. 10 иллюстрирует пример системы пространственного звуковоспроизведения, которая включает в себя систему из Фиг. 4.
В дополнение к системе из Фиг. 4 система пространственного звуковоспроизведения содержит систему 1001 пространственного звука, которая может быть, в частности, пятиканальной системой объемного звука, например, использующей компоновку громкоговорителей, проиллюстрированную на Фиг. 1-3.
Система дополнительно содержит схему 1003 звуковой среды, которая выполнена с возможностью управления системой оценки расстояния из Фиг. 4 и адаптации системы 1001 пространственного звука в ответ на оценки расстояния, принятые от этой системы.
В частности, схема 1003 звуковой среды содержит функциональные возможности для итеративного изменения направления, в котором излучается ультразвуковой сигнал, так что может определяться расстояние до стен и других объектов в некотором количестве разных направлений.
Например, процесс измерения и калибровки может начинаться схемой 1003 звуковой среды, направляющей ультразвуковой пучок под произвольным углом, например -90 градусов, где 0 градусов соответствует перпендикуляру к системе воспроизведения звука. Оценивание расстояния затем выполняется в этом направлении, и результирующая оценка расстояния подается в схему 1003 звуковой среды. Угол пучка затем обновляется с определенным шагом, и процесс измерения повторяется, пока не накоплено достаточное количество данных.
Обычно оборудование звуковоспроизведения размещается в углу помещения или вплотную к стене, и пользователь будет занимать область впереди системы. По этой причине подходящие угловые измерения могли бы находиться от -90 градусов до +90 градусов с приращениями в 5 или 10 градусов. Чем мельче угловое разрешение, тем больше данных будет доступно для определения геометрии звуковой среды.
Угловое направление, в котором направляется пучок, может управляться, например, путем физического вращения преобразователя или посредством электронного управления с использованием методик формирования пучка и сегментированного массива преобразователей.
Например, изменения направления измерения можно добиться путем установки параметрического громкоговорителя 403 на шарнирный механизм или опору с электроприводом. Используя систему управления с обратной связью, можно точно управлять абсолютным угловым направлением пучка относительно системы звуковоспроизведения. Механизм с электроприводом может позволить физически вращать параметрический громкоговоритель 403, чтобы обеспечить полнорастровое сканирование помещения.
В некоторых вариантах осуществления параметрический громкоговоритель может содержать массив ультразвуковых преобразователей, и схема 1003 звуковой среды может быть выполнена с возможностью управления значением первого направления путем управления по меньшей мере одним из относительной задержки, фазы и усиления для ультразвуковых преобразователей. Таким образом, схема 1003 звуковой среды может управлять и активизировать формирование пучка у излученного ультразвукового сигнала.
Например, можно управлять направленностью массива преобразователей путем изменения фазы, с которой преобразователи воспроизводят звуковой сигнал. Используя массив ультразвуковых преобразователей, можно соответственно создать параметрический громкоговоритель, который позволяет электронно управлять ультразвуковым сигналом несущей частоты в широком диапазоне углов без физического изменения ориентации массива преобразователей. Такой вариант осуществления может использоваться для растрового сканирования помещения.
На основе измерений расстояния для разных направлений схема 1003 звуковой среды может перейти к оцениванию геометрии звуковой среды для системы 1001 пространственного звука. В примере схема 1003 звуковой среды соответственно переходит к оцениванию геометрии помещения.
Например, схема 1003 звуковой среды может построить численную модель помещения с использованием алгоритма оптимизации для подгонки смоделированных стен к данным. В некоторых случаях правильные многоугольники можно подобрать к данным измерения, например прямоугольник. Это не всегда так, поскольку некоторые помещения имеют неправильную форму и искривленные стены. В таких обстоятельствах каждая стена может подгоняться к данным отдельно с помощью эвристических алгоритмов.
Фиг. 11 показывает результаты фактического измерения помещения с использованием способа логарифмического качания и извлечения максимума, чтобы идентифицировать расстояние между параметрическим громкоговорителем и стенами. Оптимальный прямоугольник 1101, представляющий помещение, иллюстрируется вместе с измеренными данными 1103. Всего было сделано 19 измерений от -90 до 90 градусов с приращениями в 10 градусов. Учитывались только отражения первого порядка, а все дополнительные максимумы в корреляционной импульсной характеристике игнорировались. Модель предсказала местоположения стен относительно параметрического громкоговорителя в пределах 0,1 м. В этом случае стена позади параметрического громкоговорителя не измерялась. Когда слушатель будет находиться перед системой громкоговорителей, влияние задней стены обычно будет иметь небольшое воздействие на пространственную картину, воспринимаемую слушателем.
Как только определена геометрия звуковой среды (и в частности, помещения), схема 1003 звуковой среды может перейти к автоматической адаптации системы 1001 пространственного звука к этой среде.
Например, для систем пространственного звуковоспроизведения, которые используют отраженный звук для обеспечения пространственного впечатления, как проиллюстрировано на Фиг. 2 и 3, отраженный звук из последней точки отражения перед тем, как звуковой пучок достигает пользователя, воспринимается слушателем как отправная точка источника звука. Чтобы оптимизировать пространственное впечатление (например, впечатление от домашнего кинотеатра), нужно осторожно выбирать точки отражения, и соответственно излученными звуковыми пучками следует точно управлять для соответствия определенной звуковой среде. Это можно сделать, как только известны относительные местоположения стен относительно громкоговорителей в системе пространственного звука и положения прослушивания (возможно, предполагаемого). Это может выполняться на основе оцененной геометрии помещения, и система из Фиг. 10 соответственно может реализовать автоматическую или полуавтоматическую настройку системы 1001 пространственного звука.
Описанная система может быть особенно полезна для компактных звуковых систем, которые пытаются эмулировать дискретные многоканальные системы громкоговорителей, например звуковые панели домашнего кинотеатра. Геометрическая модель помещения позволяет системе динамиков регулировать параметры системы громкоговорителей, чтобы лучше всего соответствовать геометрии помещения и обеспечивать лучшие субъективные пространственные эффекты, например, путем регулирования углового направления ультразвуковых пучков, чтобы обеспечить очень широкое впечатление при прослушивании.
В некоторых вариантах осуществления оценка звуковой среды может основываться на более сложных алгоритмах и учитывать более специфичную информацию. Например, оценки угла между излученным звуковым пучком и отражающими поверхностями могут использоваться для моделирования помещения так, что стены находятся в углах, соответствующих измерениям. Эта информация может значительно увеличить точность и скорость алгоритма, предназначенного для идентификации геометрии помещения.
Кроме того, как описано ранее, дополнительные максимумы корреляции могут использоваться для формирования оценок расстояния при многократном отражении для траекторий звука, которые включают в себя более одного отражения между параметрическим динамиком и датчиком звуковой частоты. Эти протяженности траекторий при многократном отражении тогда можно дополнительно использовать для подгонки модели к доступным данным измерения.
Например, если измеренные данные особенно шумные или было выполнено слишком мало угловых измерений, то увеличение точности восстановления может вызвать необходимость использования данных отражения более высокого порядка. Это можно выполнить, например, путем учета сначала оценок расстояния при однократном отражении, чтобы определить модель помещения первого порядка. Многократные отражения затем можно подогнать к модели помещения первого порядка, используя трассировку луча, и модель можно изменить для улучшения совпадения с измеренными расстояниями при многократном отражении.
В качестве другого примера, если была необходима точная модель размера помещения, например, для предсказания и выравнивания низкочастотных режимов помещения, то можно оценить размещение задней стены. Этого можно добиться путем рассмотрения модели отражения более высокого порядка, учитывающей оцененные протяженности траекторий при многократном отражении.
В некоторых вариантах осуществления схема 1003 звуковой среды также может определять время реверберации для звуковой среды и использовать это время для определения геометрии звуковой среды. Время реверберации представляет продолжительность времени, которая требуется звуку для затухания до интенсивности, например, на -60 дБ ниже его начального значения, и сильно связано с объемом помещения. Время реверберации может вычисляться свободно из измеренных импульсных характеристик. Примеры подходов для измерения времени реверберации можно обнаружить, например, в документе Schroeder M.R., "New Method of Measuring Reverberation Time", J. Acoust. Soc. Am. 1965, и Schroeder M.R., "Integrated-Impulse method measuring sound decay without using impulses", J. Acoust. Soc. Am. Vol. 66(2) 1979. Измеренное время реверберации может использоваться, в частности, для задания границы возможного объема помещения, и модель можно подогнать под это ограничение.
Во многих вариантах осуществления параметрический громкоговоритель 403 и микрофон 405 могут быть независимыми от системы 1001 пространственного звука. Однако в некоторых вариантах осуществления одни и те же функциональные возможности могут использоваться как для измерения расстояния, так и для обычной работы системы 1001 пространственного звука.
В частности, в некоторых вариантах осуществления параметрический динамик 403 также может использоваться для воспроизведения звука по меньшей мере для одного пространственного канала. В частности, параметрический динамик 403 может использоваться для воспроизведения звука для канала окружения в системе 1001 пространственного звука путем отражений от стен. Так как параметрический громкоговоритель 403 в этом случае уже может быть частью системы пространственного звука, единственным дополнением, необходимым для выполнения описанной автоматической калибровки и адаптации системы 1001 пространственного звука, был бы микрофон 403 и ассоциированная электроника и программный пакет.
Пример системы 1001 пространственного звука, использующей параметрические динамики для формирования каналов окружения, может описываться со ссылкой на Фиг. 2.
В системе из Фиг. 2 сигналы 205, 207 объемного звука, в частности, могут не являться традиционными слышимыми звуковыми сигналами, а точнее могут излучаться в виде ультразвуковых сигналов. Таким образом, система применяет параметрические громкоговорители, которые излучают ультразвуковые сигналы 205, 207 объемного звука.
Таким остронаправленным пучком можно гораздо лучше управлять, и в системе на Фиг. 2 он может направляться в положение 111 прослушивания посредством вполне определенных отражений от стен 209-213 помещения и может управляться на основе сформированной модели геометрии помещения. Отраженный звук достигнет ушей, обеспечивая слушателю восприятие наличия источников звука, расположенных в задней части помещения.
Таким образом, система из Фиг. 2 использует ультразвуковой преобразователь/параметрический громкоговоритель, который имеет очень направленный звуковой пучок, в качестве или как часть окружных динамиков 201, 203, которые располагаются спереди от положения 111 прослушивания. Этот ультразвуковой пучок можно легко направить в боковую или заднюю стену 209-213 помещения, так что отраженный звук достигнет ушей слушателя, чтобы обеспечить восприятие наличия источников звука, помещенных в заднюю часть помещения. Такие же ультразвуковые преобразователи/параметрические громкоговорители могут использоваться для выполнения измерений расстояния.
Ультразвуковые сигналы 205, 207 формируются путем амплитудной модуляции ультразвукового сигнала несущей частоты с помощью звукового сигнала канала окружения. Этот модулированный сигнал затем излучается из окружных динамиков 201, 203. Ультразвуковой сигнал не воспринимается непосредственно человеком, а модулирующий звуковой сигнал может демодулироваться с помощью нелинейностей для воссоздания исходного звукового сигнала, который использовался для модуляции ультразвукового сигнала несущей частоты. Таким образом, ультразвуковой сигнал можно демодулировать автоматически, чтобы предоставить слушателю слышимый звук.
Примеры и дополнительное описание использования ультразвуковых преобразователей для звукового излучения можно найти, например, в докторской диссертации "Sound from Ultrasound: The Parametric Array as an Audible Sound Source" под авторством F. Joseph Pompei, 2002 г., Массачусетский технологический институт.
Использование ультразвукового излучения в каналах окружения обеспечивает очень узкий пучок. Это позволяет лучше задавать и управлять отражениями и может, в частности, обеспечить более точное управление углом прихода в положении прослушивания. Таким образом, подход может позволить гораздо лучше задавать и управлять виртуальным воспринимаемым положением источников объемного звука. Кроме того, использование ультразвукового сигнала может позволить воспринимать такое положение ближе к точечному источнику, то есть меньше размываться. Также узкий пучок ультразвукового преобразователя уменьшает излучение звука по другим траекториям, в частности уменьшает уровень звука у любого звука, достигающего положения прослушивания по прямой траектории. Кроме того, в сочетании с описанным точным моделированием помещения его можно приспособить для точного следования определенной геометрии помещения.
В конкретном примере окружные громкоговорители 201, 203 не содержат лишь ультразвуковой преобразователь или не излучают только ультразвуковые сигналы. Наоборот, каждый из окружных громкоговорителей 201, 203 содержит компоновку динамиков, которая включает в себя как направленный ультразвуковой преобразователь для излучения ультразвука в стены 205, 207, так и громкоговоритель диапазона звуковых частот, который излучает звук в диапазоне звуковой частоты (например, ниже 5-10 кГц).
В частности, качество слышимого звука, происходящее от использования таких ультразвуковых подходов, в некоторых вариантах осуществления и сценариях не является оптимальным, поскольку процесс, посредством которого демодулируется ультразвуковая несущая, чтобы сделать модулирующий звуковой сигнал слышимым, проявляет неэффективность и по своей природе является нелинейным. Ультразвуковые громкоговорители поэтому имеют склонность создавать обычно субоптимальное качество звука, а также стремятся иметь низкую допустимую мощность, посредством этого затрудняя выработку высоких уровней звука.
В системе из Фиг. 2 этот эффект смягчается ультразвуковым преобразователем, дополняемым электродинамическим громкоговорителем переднего распространения, который дополнительно излучает некоторую часть звука из канала окружения. Это излучение сигнала в диапазоне звуковых частот может достичь положения 111 прослушивания по прямой траектории. Таким образом, в дополнение к отраженным ультразвуковым сигналам 205, 207 окружные громкоговорители 201, 203 также могут формировать сигналы 215, 217 звуковой частоты, которые, в частности, могут достичь слушателя по прямой траектории.
Использование громкоговорителя диапазона звуковых частот для дополнения направленного ультразвукового преобразователя обеспечивает улучшенное качество звука во многих вариантах осуществления. В частности, оно может обеспечить улучшенное качество звука на нижних частотах. Такие нижние частоты обычно не могут предоставить столько пространственных меток, сколько верхние частоты, и поэтому слушатель может по-прежнему воспринимать объемный звук приходящим с тыла, то есть может по-прежнему воспринимать, что сзади имеются виртуальные источники звука. Кроме того, сигналы звуковой частоты могут запаздывать относительно отраженных траекторий, так что основные пространственные метки предоставляются отраженными сигналами.
Дополнительные подробности такого подхода можно найти в европейской заявке на патент EP09162007.0.
В некоторых вариантах осуществления схема 1003 звуковой среды также функционирует для оценивания положения прослушивания. В частности, она может быть выполнена с возможностью приема зарегистрированного сигнала от микрофона 407, который содержит инициированный пользователем звук, и затем может определить положение прослушивания в ответ на этот сигнал и геометрию звуковой среды (в частности, модель помещения).
Например, возможно определить размещение пользователя с использованием вновь идентифицированной модели помещения путем приглашения пользователя издать ударный звук, например хлопок в ладоши. Ударное свойство хлопка в ладоши приведет к тому, что сигнал в микрофоне 403 будет состоять из последовательности резких пиков уменьшающейся амплитуды. Первый максимум обусловлен прямым звуком от слушателя к микрофону, а следующие максимумы происходят от последующих отражений границами помещения. Поскольку последовательность импульсов определяется положениями стен относительно пользователя и микрофона 405, каждое положение прослушивания имеет результатом уникальный сигнал. Используя процедуру оптимизации, размещение пользователя можно вывести из численной модели помещения и уникального сигнала в виде последовательности импульсов.
В качестве альтернативы ориентация акустической системы относительно геометрии помещения может использоваться для выведения наиболее вероятной области прослушивания. Например, для применений домашнего кинотеатра слушатель часто будет сидеть непосредственно перед телевизором. Предполагая, что система звуковоспроизведения выровнена с телевизором, зону прослушивания можно вывести без специальных измерений.
В некоторых вариантах осуществления схема 1003 звуковой среды дополнительно может быть выполнена с возможностью учета динамических изменений в оценках расстояния для соответствующих направлений. Например, могут определяться и учитываться динамические изменения в оценке расстояния для практически одинакового направления (или отличающегося менее чем на пороговое значение). Например, оценки расстояния в заданном направлении могут повторяться некоторое количество раз с некоторым интервалом времени. Некоторые из этих измерений могут привести к более коротким расстояниям, чем другие, и это может быть обусловлено объектом, проходящим между устройством и соответствующей стеной. Соответственно, схема 1003 звуковой среды может учитывать это при определении геометрии помещения.
В качестве примера система может повторять процесс измерения некоторое количество раз. Например, качание (например, от -90° до +90°) может повторяться некоторое количество раз (или непрерывно). В этом случае неподвижные объекты, например стены, предоставят неизменный сигнал заднего фона, тогда как пользователи или другие подвижные объекты формируют динамический сигнал, который меняется для разных сканирований. Это динамическое изменение можно затем использовать при определении геометрии помещения, например, игнорируя измерения, которые показывают слишком большое динамическое изменение. Таким образом, схема 1003 звуковой среды может быть выполнена с возможностью оценивания геометрии звуковой среды в ответ на динамические изменения в оценках расстояния.
В некоторых вариантах осуществления схема 1003 звуковой среды в качестве альтернативы или дополнительно может использовать динамические изменения для определения положения прослушивания. Таким образом, схема 1003 звуковой среды может быть выполнена с возможностью оценивания положения прослушивания в ответ на динамические изменения в оценках расстояния.
Например, когда пользователи стремятся присутствовать в течение относительно короткой части времени, но быть неподвижными в течение некоторого времени при использовании системы 1001 пространственного звука. Схема 1003 звуковой среды может искать направления, для которых измерения расстояния показывают динамические изменения, которые обладают подходящими временными изменениями. Например, направление, которое обеспечивает оценку расстояния, например, в 5 метров для 80-90% времени и, например, в 3 метра для большей части оставшегося времени, может рассматриваться как возможно соответствующее положению прослушивания. Нужно будет принять во внимание, что на практике могут применяться гораздо более сложные критерии. К тому же оценка размера может использоваться для оценивания того, имеет ли обнаруженный объект размер, соответствующий человеку.
Положение прослушивания поэтому можно идентифицировать путем выполнения нескольких растровых сканирований помещения и извлечения динамических сигналов. Динамические данные затем можно использовать для экстраполяции наиболее вероятного положения прослушивания.
В вышеприведенном описании скорость звука использовалась для оценивания расстояния. Во многих вариантах осуществления может использоваться заранее установленная скорость звука. Однако в некоторых вариантах осуществления устройство может быть выполнено с возможностью оценивания скорости звука на основе некоторого измерения и определения расстояния в ответ на ту оценку.
Действительно, в применениях, таких как настройка домашнего кинотеатра, скорее всего достаточно точности, которой можно добиться при простом номинальном значении для скорости звука (например 340 мс-1). Однако при более общем измерении расстояния может быть желательно иметь более точные оценки расстояния, и поэтому может быть полезно измерять окружающую скорость звука, которая зависит от температуры, высоты и влажности воздуха. Таким образом, устройство может содержать функциональные возможности для измерения значимых параметров, чтобы предоставить более точную оценку окружающей скорости звука в конкретной звуковой среде. Например, термометр мог бы использоваться для измерения температуры и регулирования оценки скорости на основе известной формулы/взаимосвязей. Оценки можно дополнительно улучшить, если измеряются влажность и давление окружающей среды.
Другой способ измерения окружающей скорости звук включает в себя измерения времени, затраченного звуком для прохождения фиксированного расстояния. Например, если компоновка системы может быть известна, то соответственно относительное расстояние между микрофонами и громкоговорителями может быть известно. Используя эту информацию, можно определить скорость звука из стандартных зависимостей расстояния-времени и измеренного времени пролета.
В применениях, где два ультразвуковых громкоговорителя используются для тыловых каналов, можно провести несколько измерений, например, с использованием обоих громкоговорителей на некоторой области плоской стены/поверхности отражения. Если накоплено достаточно данных, то можно получить набор взаимозависимых измерений времени при разных углах. Введение этих данных вместе с известной компоновкой активных составляющих в математическую модель позволяет создать зависимость, которая может выполняться только одним значением для скорости звука. Эта скорость может впоследствии использоваться для определения расстояния.
В некоторых вариантах осуществления устройство может дополнительно содержать средство для улавливания обнаруженного ультразвукового сигнала, содержащего ультразвуковой сигнал, излученный из параметрического громкоговорителя 403. В таких вариантах осуществления измерение расстояния может происходить дополнительно в ответ на этот обнаруженный ультразвуковой сигнал. В качестве альтернативы или дополнительно оценка угла между первым направлением и отражающей поверхностью объекта может определяться в ответ на обнаруженный ультразвуковой сигнал.
Таким образом, устройство может быть выполнено с возможностью измерения отраженного ультразвукового сигнала, посредством этого предоставляя второе измерение, которое может использоваться для измерения расстояния. Это может обеспечить особенно выгодную эффективность для сценариев, где отражающая поверхность может быть почти перпендикулярной направлению пучка.
В действительности для углов, близких к 90°, отражается большая доля ультразвука, посредством этого обеспечивая точное определение расстояния на основе ультразвука. Однако при углах, значительно отклоняющихся от 90°, обнаружение звуковой частоты, скорее всего, обеспечит наилучшие измерения расстояния из-за слабого отражения ультразвука. В некоторых вариантах осуществления устройство может определять оценку расстояния на основе звукового сигнала и другую оценку расстояния на основе ультразвукового сигнала. Итоговую оценку расстояния тогда можно определить как взвешенную комбинацию двух оценок, причем, например, вес зависит от уровня сигнала (например, мощности, энергии или амплитуды) у ультразвукового сигнала.
Дополнительное измерение также может использоваться для оценивания угла отражающей поверхности. Например, высокая концентрация ультразвука указала бы, что поверхность перпендикулярна, тогда как более низкие уровни сигнала, скорее всего, указывают угол, отклоняющийся от перпендикуляра.
Нужно будет принять во внимание, что вышеприведенное описание для ясности описало варианты осуществления изобретения со ссылкой на разные функциональные схемы, блоки и процессоры. Однако станет очевидно, что может использоваться любое подходящее распределение функциональных возможностей между разными функциональными схемами, блоками или процессорами без преуменьшения изобретения. Например, функциональные возможности, проиллюстрированные как выполняемые отдельными процессорами или контроллерами, могут выполняться одним процессором или контроллером. Поэтому ссылки на конкретные функциональные блоки или схемы нужно рассматривать только в качестве ссылок на подходящее средство для обеспечения описанных функциональных возможностей, а не указания на строгую логическую или физическую структуру или организацию.
Изобретение может быть реализовано в любой подходящей форме, включая аппаратные средства, программное обеспечение, микропрограммное обеспечение или любое их сочетание. Изобретение при желании может быть реализовано, по меньшей мере частично, в виде компьютерного программного обеспечения, выполняемого на одном или нескольких процессорах данных и/или цифровых процессорах сигналов. Элементы и компоненты из варианта осуществления изобретения могут быть физически, функционально и логически реализованы любым подходящим способом. В действительности функциональные возможности могут быть реализованы в одном блоке, в множестве блоков или как часть других функциональных блоков. По существу, изобретение может быть реализовано в одном блоке или может быть физически и функционально распределено между разными блоками, схемами и процессорами.
Хотя настоящее изобретение описано применительно к некоторым вариантам осуществления, оно не предназначено, чтобы ограничиваться конкретной формой, изложенной в этом документе. Наоборот, объем настоящего изобретения ограничивается только прилагаемой формулой изобретения. Более того, хотя признак может казаться описанным по отношению к конкретным вариантам осуществления, специалист в данной области техники признал бы, что различные признаки описанных вариантов осуществления могут объединяться в соответствии с изобретением. В формуле изобретения термин "содержащий" не исключает наличия других элементов или этапов.
Кроме того, хотя и не перечислено отдельно, множество средств, элементов, схем или этапов способа могут быть реализованы, например, одиночной схемой, блоком или процессором. Более того, хотя отдельные признаки могут включаться в разные пункты формулы изобретения, они могут по возможности выгодно объединяться, и включение в разные пункты формулы не подразумевает, что сочетание признаков не является осуществимым и/или выгодным. Также включение признака в одну категорию пунктов формулы не подразумевает ограничение этой категорией, а скорее указывает, что при необходимости признак в равной степени применим к другим категориям пунктов формулы. Кроме того, порядок признаков в формуле изобретения не подразумевает никакого конкретного порядка, в котором должны обрабатываться признаки, и в частности, порядок отдельных этапов в пункте формулы изобретения на способ не подразумевает, что этапы должны выполняться в этом порядке. Скорее, этапы могут выполняться в любом подходящем порядке. К тому же единичные ссылки не исключают множества. Таким образом, ссылки на "первый", "второй" и т.д. не препятствуют множеству. Ссылочные позиции в формуле изобретения предоставляются лишь в качестве поясняющего примера и не должны толковаться как ограничивающие объем формулы изобретения каким-либо образом.
Реферат
Группа изобретений относится к метрологии, в частности к акустическим средствам измерения расстояния до объекта. Устройство содержит генератор тестового сигнала, модулятор, параметрический громкоговоритель, средство демодуляции ультразвукового сигнала, средство приема сигнала звуковой частоты, схему оценки расстояния. Схема рассчета расстояния формирует оценку в ответ на сравнение зарегистрированного сигнала звуковой частоты и тестового сигнала звуковой частоты для определения задержки, соответствующей полной длине траектории. При этом генератор тестового сигнала выполнен с возможностью вычисления оценки отраженного звукового сигнала. Оценка отраженного звукового сигнала может определяться соответствующей звуковому сигналу, который формируется в результате нелинейной демодуляции тестового сигнала звуковой частоты в воздухе. Разница между оценкой отраженного звукового сигнала и тестовым сигналом звуковой частоты характеризует нелинейности траектории звука. При оценке расстояния вычисляется максимум корреляции между зарегистрированным сигналом звуковой частоты и оценкой отраженного звукового сигнала. Технический результат - повышение точности и упрощение процедуры измерений. 3 н. и 12 з.п. ф-лы, 11 ил.
Формула
генератор (401) тестового сигнала для формирования ультразвукового тестового сигнала путем модулирования тестового сигнала звуковой частоты в ультразвуковом сигнале, при этом генератор тестового сигнала дополнительно выполнен с возможностью формирования оценки отраженного звукового сигнала;
параметрический громкоговоритель (403) для излучения ультразвукового тестового сигнала в первом направлении;
датчик (405) звуковой частоты для формирования зарегистрированного сигнала звуковой частоты, содержащего демодулированный отраженный сигнал звуковой частоты, происходящий из ультразвукового тестового сигнала; и
схему (407) оценки расстояния для формирования оценки расстояния для расстояния от параметрического громкоговорителя (403) до объекта в ответ на:
- зарегистрированный сигнал звуковой частоты и
- оценку отраженного звукового сигнала.
изменения первого направления;
приема оценок расстояния для разных значений первого направления; и
определения геометрии звуковой среды в ответ на оценки расстояния.
формируют ультразвуковой тестовый сигнал путем модулирования тестового сигнала звуковой частоты в ультразвуковом сигнале;
формируют оценку отраженного звукового сигнала;
излучают ультразвуковой тестовый сигнал в первом направлении из параметрического громкоговорителя (403);
регистрируют сигнал звуковой частоты с помощью датчика (405) звуковой частоты, причем зарегистрированный сигнал звуковой частоты содержит демодулированный отраженный сигнал звуковой частоты, происходящий из ультразвукового тестового сигнала; и
формируют оценку расстояния для расстояния от параметрического громкоговорителя (403) до объекта в ответ на:
- зарегистрированный сигнал звуковой частоты и
- оценку отраженного звукового сигнала.
Комментарии