Устройство обнаружения источника звука - RU2576339C2
Код документа: RU2576339C2
Чертежи








Описание
Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству обнаружения источника звука, которое обнаруживает источник звука обнаруживаемого объекта на основе собираемых звуков.
Уровень техники
[0002] В типичном устройстве обнаружения источника звука периферийные звуки собираются, соответственно, посредством множества модулей сбора звука, и наличие, направление и т.д. источника звука (например, звука при движении от транспортного средства) обнаруживается с использованием взаимной корреляции между звуками, собираемыми посредством множества модулей сбора звука. В устройстве, описанном в патентном документе 1, акустические сигналы, выводимые, соответственно, посредством множества микрофонов, расположенных с предварительно определенными интервалами, преобразуются в скорректированные акустические сигналы посредством удаления частотных компонентов в полосе низких частот и полосе высоких частот, соответственно, из них с использованием полосового фильтра, после чего мощность предварительно определенной полосы частот, в которой появляются признаки звука при движении транспортного средства, вычисляется из скорректированных акустических сигналов. Когда уровень мощности выше предварительно определенного значения, определяется то, что приближающееся транспортное средство присутствует. Дополнительно, скорректированные акустические сигналы преобразуются в сигналы с уменьшенным шумом посредством удаления необязательного компонента шума из них, после чего вычисляется взаимная корреляция между сигналами с уменьшенным шумом из множества микрофонов. Направление приближения приближающегося транспортного средства затем идентифицируется из разности времени поступления, возникающей, когда взаимная корреляция принимает максимальное значение.
[0003] Патентный документ 1. Публикация заявки на полезную модель (Япония) № 5-92767
Патентный документ 2. Публикация заявки на патент (Япония) № 8-202999
Патентный документ 3. Публикация заявки на патент (Япония) № 60-151522
Сущность изобретения
[0004] Когда обнаруживается звук при движении транспортного средства, приближающегося к рассматриваемому транспортному средству, приближающееся транспортное средство приближается к рассматриваемому транспортному средству из удаленной позиции, и, следовательно, громкость звука при движении снижается в соответствии с расстоянием, на которое приближающееся транспортное средство удалено от рассматриваемого транспортного средства. Следовательно, когда обнаружение источника звука выполняется с использованием взаимной корреляции, надежность касательно отношения "сигнал-шум" (S/N) снижается по мере того, как затихает звук при движении приближающегося транспортного средства, затрудняя обнаружение звука при движении из периферийного окружающего шума (электромагнитного шума и т.п.). Следовательно, приближающееся транспортное средство может быть определено только тогда, когда оно находится рядом (когда звук при движении нарастает), и как результат, время обнаружения приближающегося транспортного средства задерживается.
[0005] Следовательно, задача изобретения заключается в том, чтобы предоставлять устройство обнаружения источника звука, которое демонстрирует улучшенные рабочие характеристики обнаружения при обнаружении источника звука обнаруживаемого объекта.
[0006] Устройство обнаружения источника звука согласно изобретению обнаруживает источник звука обнаруживаемого объекта на основе собираемых звуков и включает в себя: по меньшей мере, один модуль сбора звука; средство вычисления автокорреляции для вычисления автокорреляции между звуками, собираемыми во временных рядах посредством модуля сбора звука; и средство определения для определения того, присутствует или нет источник звука обнаруживаемого объекта, на основе автокорреляции, вычисленной посредством средства вычисления автокорреляции.
[0007] Устройство обнаружения источника звука включает в себя, по меньшей мере, один модуль сбора звука, и периферийные звуки собираются посредством модуля сбора звука. В устройстве обнаружения источника звука, автокорреляция вычисляется посредством средства вычисления автокорреляции с использованием данных временных рядов звуков. Кроме того, в устройстве обнаружения источника звука, определение в отношении того, присутствует или нет источник звука обнаруживаемого объекта, выполняется посредством средства определения на основе автокорреляции. В случае окружающего шума, всегда собираемого посредством модуля сбора звука, корреляция не может быть получена после сдвига по времени, и, следовательно, автокорреляция является низкой. Тем не менее, в случае звука, испускаемого из конкретного источника звука, корреляция может быть получена после сдвига по времени, и, следовательно, автокорреляция увеличивается. Следовательно, когда используется автокорреляция, надежность автокорреляции касательно отношения "сигнал-шум" повышается, даже когда звук из конкретного источника звука является сравнительно небольшим. В частности, надежность автокорреляции касательно отношения "сигнал-шум" выше надежности взаимной корреляции, вычисленной из звуков, собираемых, соответственно, посредством множества модулей сбора звука. Следовательно, в устройстве обнаружения источника звука, посредством вычисления автокорреляций собираемых звуков и использования автокорреляций для того, чтобы обнаруживать источник звука обнаруживаемого объекта, демонстрируется высокая надежность касательно отношения "сигнал-шум", приводя к улучшенным рабочим характеристикам обнаружения при обнаружении источника звука обнаруживаемого объекта. В частности, когда звук из источника звука постепенно увеличивается (например, когда приближающееся транспортное средство приближается постепенно, так что громкость звука при движении постепенно возрастает), источник звука может быть обнаружен раньше, чем при традиционном способе с использованием взаимной корреляции.
[0008] Предпочтительно, в устройстве обнаружения источника звука согласно изобретению, предоставляются два или более модулей сбора звука, средство вычисления автокорреляции вычисляет соответствующие автокорреляции для каждого из модулей сбора звука, и средство определения определяет то, удовлетворяют или нет автокорреляции, вычисленные посредством средства вычисления автокорреляции, звуков, собираемых, соответственно, посредством двух или более модулей сбора звука, предварительно определенному условию.
[0009] Это устройство обнаружения источника звука включает в себя, по меньшей мере, два модуля сбора звука, и звуки собираются, соответственно, посредством модулей сбора звука. В устройстве обнаружения источника звука, автокорреляции вычисляются, соответственно, посредством средства вычисления автокорреляции с использованием данных временных рядов звуков, собираемых посредством соответствующих модулей сбора звука. Кроме того, в устройстве обнаружения источника звука, определение в отношении того, присутствует или нет источник звука обнаруживаемого объекта, выполняется посредством средства определения на основе того, удовлетворяют или нет автокорреляции соответствующих модулей сбора звука предварительно определенному условию. Следовательно, в устройстве обнаружения источника звука, посредством вычисления автокорреляций между звуками, собираемыми, соответственно, посредством двух или более модулей сбора звука, и использования автокорреляций двух или более модулей сбора звука для того, чтобы обнаруживать источник звука обнаруживаемого объекта, демонстрируется высокая надежность касательно отношения "сигнал-шум", приводя к еще более улучшенным рабочим характеристикам обнаружения при обнаружении источника звука обнаруживаемого объекта. Например, в случае если используются автокорреляции между звуками, собираемыми, соответственно, посредством двух или более модулей сбора звука, шум (окружающий шум) может быть определен, когда автокорреляция модуля сбора звука увеличивается, но автокорреляция другого модуля сбора звука остается низкой и, следовательно, достигается повышение точности обнаружения по сравнению со случаем, в котором используется автокорреляция звука, собираемого посредством одного модуля сбора звука. Кроме того, условие для определения обнаружения источника звука может задаваться ниже условия для случая, в котором используется автокорреляция звука, собираемого посредством одного модуля сбора звука (поскольку источник звука может быть определен, даже когда звук из источника звука является слабым), и, следовательно, источник звука может быть обнаружен раньше.
[0010] Устройство обнаружения источника звука согласно изобретению предпочтительно дополнительно включает в себя: средство вычисления взаимной корреляции для вычисления взаимной корреляции между звуками, собираемыми во временных рядах, соответственно, посредством двух или более модулей сбора звука; и средство указания для указания позиции источника звука обнаруживаемого объекта на основе взаимной корреляции, вычисленной посредством средства вычисления взаимной корреляции.
[0011] В этом устройстве обнаружения источника звука звуки собираются, соответственно, посредством двух или более модулей сбора звука. В устройстве обнаружения источника звука, взаимная корреляция вычисляется посредством средства вычисления взаимной корреляции с использованием данных временных рядов звуков, собираемых посредством соответствующих модулей сбора звука. Кроме того, в устройстве обнаружения источника звука, позиция источника звука обнаруживаемого объекта указывается посредством средства указания на основе взаимной корреляции. Когда используется взаимная корреляция, распознается разность времен, с которой звук из источника звука достигает соответствующих модулей сбора звука и, следовательно, позиция источника звука (например, направление источника звука и расстояние до источника звука) может указываться из разности времени поступления. Следовательно, в устройстве обнаружения источника звука, посредством дополнительного вычисления взаимной корреляции между звуками, собираемыми, соответственно, посредством двух или более модулей сбора звука, и использования взаимной корреляции для того, чтобы обнаруживать источник звука обнаруживаемого объекта, также может быть обнаружена позиция источника звука обнаруживаемого объекта. Дополнительно, посредством использования как автокорреляции, так и взаимной корреляции в устройстве обнаружения источника звука может предотвращаться ситуация, в которой ошибочное обнаружение получается из взаимной корреляции на основе результата определения, полученного из автокорреляции.
[0012] Устройство обнаружения источника звука согласно изобретению предпочтительно дополнительно включает в себя средство определения неисправности для определения неисправности в модуле сбора звука посредством сравнения варьирования автокорреляций, вычисленных посредством средства вычисления автокорреляции, звуков, собираемых, соответственно, посредством двух или более модулей сбора звука.
[0013] Типично, когда модуль сбора звука выходит из строя, модуль сбора звука может выводить только звуки идентичного уровня и, следовательно, его автокорреляция принимает нерегулярное значение (например, чрезвычайно небольшое значение или чрезвычайно большое значение). Дополнительно, когда модуль сбора звука выходит из строя, звуки могут выводиться произвольно, так что автокорреляция принимает случайное значение. В этом случае, по сравнению с автокорреляцией звука, собираемого посредством нормального модуля сбора звука, появляется четкое различие между варьированием автокорреляции вышедшего из строя модуля сбора звука и варьированием автокорреляции нормального модуля сбора звука. Следовательно, в устройстве обнаружения источника звука, неисправность в модуле сбора звука определяется посредством средства определения неисправности посредством сравнения варьирования автокорреляций между звуками, собираемыми, соответственно, посредством двух или более модулей сбора звука. В устройстве обнаружения источника звука, посредством использования автокорреляций двух или более модулей сбора звука, таким образом, также может быть определена неисправность в модуле сбора звука. Как результат, может предотвращаться ошибочное обнаружение, вызываемое посредством неисправности в модуле сбора звука.
[0014] Согласно изобретению, автокорреляция собираемых звуков вычисляется и используется для того, чтобы обнаруживать источник звука обнаруживаемого объекта. Как результат, надежность касательно отношения "сигнал-шум" повышается, приводя к улучшенным рабочим характеристикам обнаружения при обнаружении источника звука обнаруживаемого объекта.
Краткое описание чертежей
[0015] Фиг. 1 является видом, показывающим конфигурацию устройства обнаружения приближающихся транспортных средств согласно первому варианту осуществления.
Фиг. 2 является видом, показывающим пример способа определения наличия приближающегося транспортного средства на диаграмме рассеивания значений автокорреляции аудиосигналов из двух микрофонов.
Фиг. 3 является видом, показывающим пример способа определения наличия приближающегося транспортного средства на диаграмме рассеивания значений автокорреляции аудиосигналов из двух микрофонов.
Фиг. 4 является видом, показывающим пример способа определения наличия приближающегося транспортного средства на диаграмме рассеивания значений автокорреляции аудиосигналов из двух микрофонов.
Фиг. 5 является блок-схемой последовательности операций способа, показывающей последовательность операций обработки обнаружения приближающихся транспортных средств, выполняемой посредством электронного модуля управления (ECU) согласно первому варианту осуществления.
Фиг. 6 является видом, показывающим конфигурацию устройства обнаружения приближающихся транспортных средств согласно второму варианту осуществления.
Фиг. 7 является видом, показывающим пример диаграммы рассеивания значений автокорреляции аудиосигналов из двух микрофонов, когда второй микрофон выходит из строя.
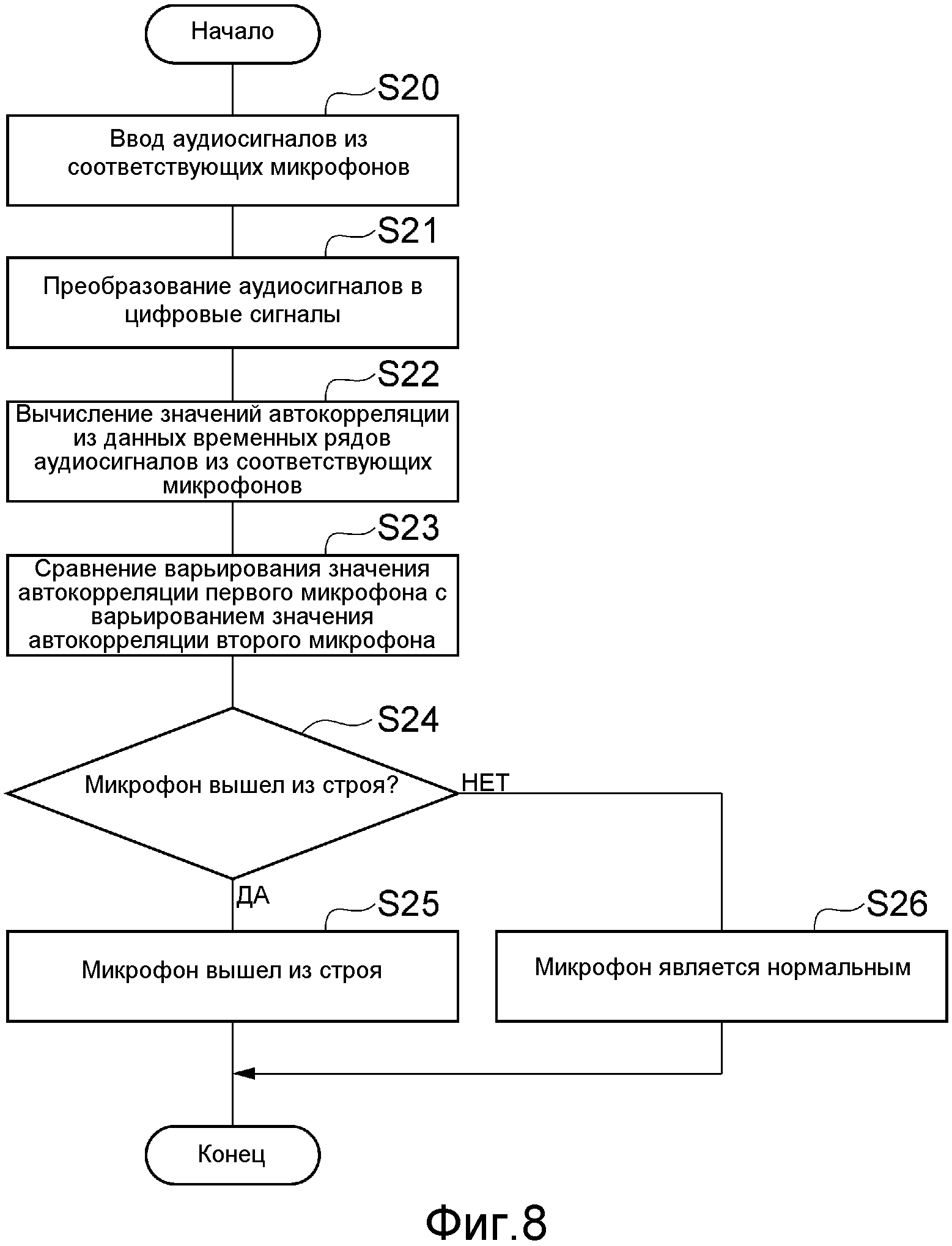
Фиг. 8 является блок-схемой последовательности операций способа, показывающей последовательность операций обработки определения неисправности микрофона, выполняемой посредством ECU согласно второму варианту осуществления.
Фиг. 9 является видом, показывающим конфигурацию устройства обнаружения приближающихся транспортных средств согласно третьему варианту осуществления.
Фиг. 10 показывает пример временного варьирования значения автокорреляции аудиосигнала из одного микрофона.
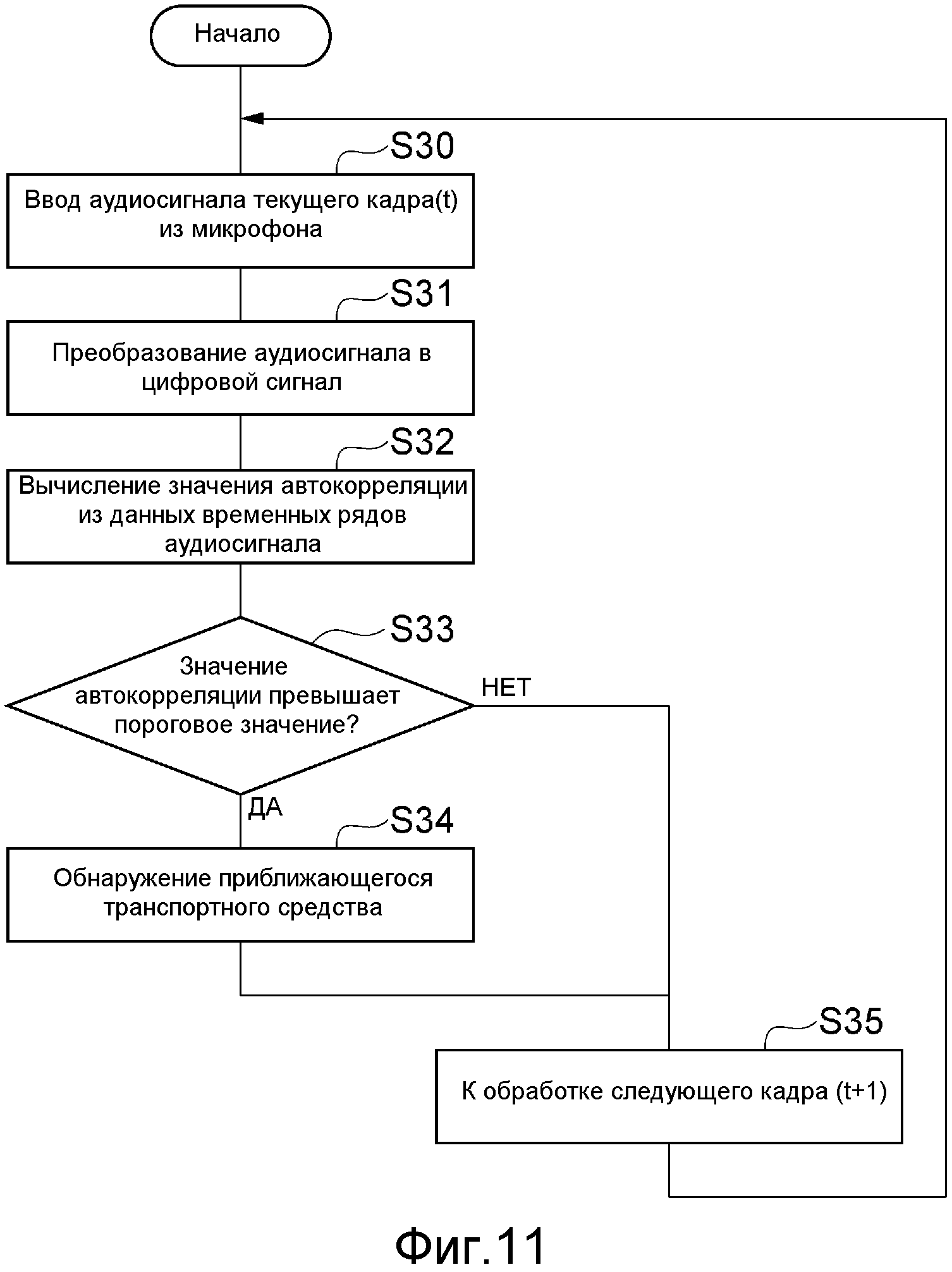
Фиг. 11 является блок-схемой последовательности операций способа, показывающей последовательность операций обработки обнаружения приближающихся транспортных средств, выполняемой посредством ECU согласно третьему варианту осуществления.
Варианты осуществления изобретения
[0016] Ниже описываются варианты осуществления устройства обнаружения источника звука согласно изобретению со ссылкой на чертежи. Следует отметить, что идентичным или соответствующим элементам на чертежах назначены идентичные условные обозначения и их дублированное описание опущено.
[0017] В этих вариантах осуществления, устройство обнаружения источника звука согласно изобретению применяется к устройству обнаружения приближающихся транспортных средств, установленному в транспортном средстве. Устройство обнаружения приближающихся транспортных средств согласно вариантам осуществления обнаруживает другое транспортное средство, приближающееся к рассматриваемому транспортному средству, на основе звуков, собираемых посредством микрофона (другими словами, обнаруживает звук при движении (источник звука), испускаемый из другого транспортного средства), и предоставляет в устройство помощи при вождении информацию, связанную с приближающимся транспортным средством. Варианты осуществления включают в себя три варианта осуществления. В первом варианте осуществления, предоставляются два микрофона и используются как автокорреляция, так и взаимная корреляция. Во втором варианте осуществления, определение неисправности выполняется в дополнение к конфигурации первого варианта осуществления. В третьем варианте осуществления, предоставляется один микрофон и используется только автокорреляция.
[0018] Следует отметить, что звук при движении транспортного средства, главным образом, состоит из шума при движении автомобилей (фрикционного шума, формируемого между поверхностью шины и поверхностью дороги) и шума от протектора шины (воздушный вихрь (сжатие/освобождение) в канавке в протекторе шины). Звук при движении также может включать в себя шум от двигателя, шум ветра и т.д. Диапазон частотных компонентов звука при движении транспортного средства может измеряться заранее посредством эксперимента и т.п.
[0019] Ссылаясь на Фиг. 1-4, описывается устройство 1 обнаружения приближающихся транспортных средств согласно первому варианту осуществления. Фиг. 1 является видом, показывающим конфигурацию устройства обнаружения приближающихся транспортных средств согласно первому варианту осуществления. Фиг. 2-4 являются видами, показывающими примеры способов определения наличия приближающегося транспортного средства на диаграмме рассеивания значений автокорреляции аудиосигналов из двух микрофонов.
[0020] Устройство 1 обнаружения приближающихся транспортных средств вычисляет автокорреляцию и взаимную корреляцию из звуков, собираемых посредством двух микрофонов, и обнаруживает наличие приближающегося транспортного средства, направление приближающегося транспортного средства и т.д. с использованием автокорреляции и взаимной корреляции. С этой целью устройство 1 обнаружения приближающихся транспортных средств включает в себя первый микрофон 11, второй микрофон 12 и ECU 21 (первый модуль 21a аналого-цифрового (A/D) преобразования, второй модуль 21b аналого-цифрового преобразования, первый модуль 21c вычисления автокорреляции, второй модуль 21d вычисления автокорреляции, модуль 21e вычисления взаимной корреляции и модуль 21f обнаружения транспортных средств).
[0021] Следует отметить, что в первом варианте осуществления, первый микрофон 11 и второй микрофон 12 соответствуют двум или более модулям сбора звука, описанным в формуле изобретения, первый модуль 21c вычисления автокорреляции и второй модуль 21d вычисления автокорреляции соответствуют средству вычисления автокорреляции, описанному в формуле изобретения, модуль 21e вычисления взаимной корреляции соответствует средству вычисления взаимной корреляции, описанному в формуле изобретения, и модуль 21f обнаружения транспортных средств соответствует средству определения и средству указания, описанным в формуле изобретения.
[0022] Два микрофона 11, 12 составляют микрофонную решетку и располагаются в левой и правой передних концевых частях транспортного средства таким образом, что они ориентированы в предварительно определенном направлении (например, два микрофона 11, 12 располагаются на идентичной высоте в лево-правых симметричных позициях относительно центра транспортного средства и ориентированы либо вперед, либо вперед и наружу). Компоновка и направление сбора звука микрофонов 11, 12 могут задаваться требуемым образом. Микрофоны 11, 12 являются электроакустическими преобразователями, которые собирают периферийные звуки снаружи транспортного средства и преобразуют собираемые звуки в аудиосигналы (электрические сигналы). Соответствующие микрофоны 11, 12 собирают звуки и выводят аудиосигналы в ECU 21 с кадровыми интервалами (фиксированными временными интервалами).
[0023] ECU 21 представляет собой ECU, состоящий из центрального процессора (CPU), постоянного запоминающего устройства (ROM), оперативного запоминающего устройства (RAM) и т.д. и выполняет общее управление устройством 1 обнаружения приближающихся транспортных средств. Первый модуль 21a аналого-цифрового преобразования, второй модуль 21b аналого-цифрового преобразования, первый модуль 21c вычисления автокорреляции, второй модуль 21d вычисления автокорреляции, модуль 21e вычисления взаимной корреляции и модуль 21f обнаружения транспортных средств предоставляются в ECU 21. Аудиосигналы, выводимые, соответственно, из двух микрофонов 11, 12 вводятся в ECU 21 с кадровыми интервалами (фиксированными временными интервалами), после чего различные типы обработки выполняются посредством соответствующих процессоров 21a, 21b, 21c, 21d, 21e, 21f с использованием аудиосигналов.
[0024] Первый модуль 21a аналого-цифрового преобразования преобразует аудиосигнал (аналоговый сигнал) из первого микрофона 11 в цифровой аудиосигнал с кадровыми интервалами. Второй модуль 21b аналого-цифрового преобразования преобразует аудиосигнал (аналоговый сигнал) из второго микрофона 12 в цифровой аудиосигнал с кадровыми интервалами. После аналогово-цифрового преобразования предварительно определенные полосы частот (полоса высоких частот и полоса низких частот, которые являются, соответственно, более высокими и более низкими, чем полоса частот, которая удобно включает в себя полосу частот звука при движении транспортного средства) удаляются из аудиосигналов. Следует отметить, что после этой предварительной обработки, аудиосигналы сохраняются в предварительно определенной области RAM ECU 21 в течение предварительно определенного времени (достаточного количества времени для того, чтобы иметь возможность вычислять автокорреляцию и взаимную корреляцию).
[0025] Первый модуль 21c вычисления автокорреляции вычисляет, с кадровыми интервалами, значение автокорреляции аудиосигнала (цифрового сигнала) из первого микрофона 11, преобразованного посредством первого модуля 21a аналого-цифрового преобразования, с использованием данных временных рядов, связанных с аудиосигналом. Дополнительно, второй модуль 21d вычисления автокорреляции вычисляет, с кадровыми интервалами, значение автокорреляции аудиосигнала (цифрового сигнала) из второго микрофона 12, преобразованного посредством второго модуля 21b аналого-цифрового преобразования, с использованием данных временных рядов, связанных с аудиосигналом.
[0026] Далее описывается способ вычисления значений автокорреляции согласно этому варианту осуществления. Этот способ вычисления использует коэффициент анализа на основе фазы взаимного спектра мощности (CSP) (значение взаимной корреляции). Чтобы вычислять CSP-коэффициент, во-первых, когда аудиосигналы из соответствующих микрофонов, соответствующих номеру t кадра, задаются в качестве xi(t) и быстрое преобразование Фурье (FFT) xi(t) задается в качестве Xi(ω), Xi(ω) вычисляется из уравнения (1). Здесь, "i", написанный в качестве подстрочного индекса, является номером микрофона и, следовательно, i=1, 2. Дополнительно, когда данные средней амплитуды для двух микрофонов задаются как A(ω), A(ω) вычисляется из уравнения (2). Следует отметить, что A(ω)=Xi(ω). Кроме того, когда FFT соответствующих микрофонов задаются в качестве X1(ω), X2(ω), данные средней амплитуды соответствующих микрофонов задаются в качестве A1(ω), A2(ω), CSP-коэффициент задается в качестве csp(d), и минимальная ошибка модуля вычисления задается в качестве eps, csp(d) вычисляется из уравнения (3) (уравнения (4) или уравнения (5)). "•", написанный в качестве надстрочного индекса в соответствующих уравнениях, указывает комплексно-сопряженное число, и обратное быстрое преобразование Фурье указывается в качестве IFFT.
Математическое выражение 1


где A(ω)=Xi(ω)
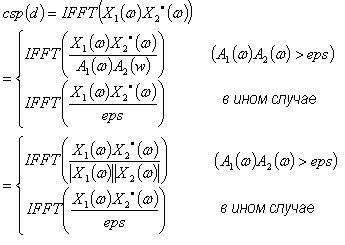
[0027] В уравнении (3), значение csp(d), когда (X1(ω)=X2•(ω)) соответствует значению автокорреляции. В этом случае, csp(d) становится равным 1, но фактически, шумовая модель предусматривается и включается в уравнение (3). Когда оцененное значение отношения "сигнал-шум" (SNR) задается в качестве SNR(ω) и значение шума задается в качестве N(ω), SNR(ω) вычисляется из уравнения (6). Формируется маска, которая пропускает полосу частот, в которой SNR(ω) превышает пороговое значение и блокирует полосу частот, в которой SNR(ω) равно или меньше порогового значения. Когда маска задается в качестве M(ω), и пороговое значение задается в качестве ThresholdSNR,·M(ω) формирует условное выражение, показанное в уравнении (7). Здесь, когда маска M(ω) включается в уравнение (3), получается уравнение (8). Значение csp(d), которое вычисляется на основе уравнения (8), заново записанное как (X1(ω)=X2•(ω)), соответствует значению автокорреляции. Следовательно, значение, служащее в качестве значения автокорреляции, вычисленного в этом варианте осуществления, соответствует пропорции сигнала, проходящего через маску, и, следовательно, представляет надежность в каждом кадре. Когда значения автокорреляции соответствующих микрофонов задаются в качестве Rii (i=1, 2), данные временных рядов, в которых времена аудиосигналов микрофонов не сдвигаются, и данные временных рядов, в которых времена сдвигаются на запаздывание во времени, используются для того, чтобы вычислять, для каждого микрофона, Xi(ω) из уравнения (1), Ai(ω) из уравнения (2) и Rii из уравнения (9). Следует отметить, что запаздывание во времени задается равным, например, приблизительно нескольким сотням миллисекунд и нескольким десяткам миллисекунд.
Математическое выражение 2




[0028] В этой связи, в случае звука (например, звука при движении от транспортного средства), испускаемого из конкретного источника звука, корреляция может быть получена после сдвига по времени и, следовательно, автокорреляция увеличивается. Тем не менее, в случае окружающего шума корреляция не может быть получена после сдвига по времени и, следовательно, автокорреляция снижается. Следовательно, надежность автокорреляции касательно отношения "сигнал-шум" повышается, даже когда звук из источника звука является сравнительно слабым. В частности, надежность автокорреляции касательно отношения "сигнал-шум" выше надежности взаимной корреляции, вычисленной из аудиосигналов, сформированных, соответственно, посредством множества микрофонов.
[0029] Модуль 21e вычисления взаимной корреляции использует данные временных рядов аудиосигнала (цифрового сигнала) из первого микрофона 11, преобразованные посредством первого модуля 21a аналого-цифрового преобразования, и данные временных рядов аудиосигнала (цифрового сигнала) из второго микрофона 12, преобразованные посредством второго модуля 21b аналого-цифрового преобразования, чтобы вычислять, с кадровыми интервалами, значение взаимной корреляции (CSP-коэффициент) между аудиосигналом из первого микрофона 11 и аудиосигналом из второго микрофона 12 посредством сдвига по времени двух наборов данных временных рядов пошагово. Здесь, CSP-коэффициент вычисляется с использованием уравнения (3) (или уравнения (8)).
[0030] Модуль 21f обнаружения транспортных средств определяет, с кадровыми интервалами, то, удовлетворяют или нет значение автокорреляции первого микрофона 11, вычисленное посредством первого модуля 21c вычисления автокорреляции, и значение автокорреляции второго микрофона 12, вычисленное посредством второго модуля 21d вычисления автокорреляции, предварительно определенному условию, и когда предварительно определенное условие удовлетворяется, определяет то, что приближающееся транспортное средство (звук при движении, испускаемый посредством транспортного средства) присутствует. Первый микрофон 11 и второй микрофон 12 располагаются в ближайших позициях (самое большее приблизительно в ширину транспортного средства) и, следовательно, могут нормально собирать идентичные звуки. Следовательно, их автокорреляции увеличиваются аналогично относительно звука, испускаемого из конкретного источника звука.
[0031] Следовательно, как показано на Фиг. 2-4 (на которых проиллюстрированы значения автокорреляции соответствующих микрофонов 11, 12, полученные в течение предварительно определенного времени, при этом абсцисса показывает значение автокорреляции второго микрофона 12, а ордината показывает значение автокорреляции первого микрофона 11), существует корреляционная взаимосвязь между значением автокорреляции первого микрофона 11 и значением автокорреляции второго микрофона 12, так что когда звук (в частности, звук при движении транспортного средства) испускается из конкретного источника звука на периферии рассматриваемого транспортного средства, значение автокорреляции первого микрофона 11 и значение автокорреляции второго микрофона 12 увеличиваются. Тем не менее, когда громкий звук поступает только в один микрофон, увеличивается только значение автокорреляции этого микрофона, а когда только окружающий шум поступает в оба микрофона, значения автокорреляции обоих микрофонов снижаются. Следовательно, можно определять то, что предварительно определенное условие удовлетворяется, когда значения автокорреляции двух микрофонов 11, 12 увеличиваются на определенную величину. Ниже описываются примеры условия для определения наличия приближающегося транспортного средства со ссылкой на Фиг. 2-4.
[0032] В примере, показанном на Фиг. 2, пороговое значение th11 и пороговое значение th22 предоставляются относительно значения R11 автокорреляции первого микрофона 11 и значения R22 автокорреляции второго микрофона 12, соответственно. Условие определения, показанное в уравнении (10), затем задается, и когда условие определения уравнения (10) удовлетворяется, определяется то, что приближающееся транспортное средство присутствует. Пороговое значение th11 и пороговое значение th22 задаются заранее посредством эксперимента и т.п. и могут принимать идентичные или различные значения. Например, когда первый микрофон 11 и второй микрофон 12 располагаются в лево-правых симметричных позициях таким образом, что они демонстрируют лево-правую симметричную направленность сбора звука, пороговое значение th11 и пороговое значение th22 задаются равными идентичным значениям, а когда первый микрофон 11 и второй микрофон 12 не располагаются в лево-правых симметричных позициях и, следовательно, не демонстрируют лево-правую симметричную направленность сбора звука, пороговое значение th11 и пороговое значение th22 задаются равными различным значениям.
Математическое выражение 3

[0033] В примере, показанном на Фиг. 3, предоставляются пороговое значение r12, связанное с отношением между значением R11 автокорреляции первого микрофона 11 и значением R22 автокорреляции второго микрофона 12, и пороговое значение th12, связанное с меньшим значением автокорреляции. Затем задается условие определения, показанное в уравнении (11), отношение определяется посредством деления значения R11 автокорреляции на значение R22 автокорреляции, и выбирается меньшее значение автокорреляции из значения R11 автокорреляции и значения R22 автокорреляции. Когда условие определения уравнения (11) удовлетворяется, определяется то, что приближающееся транспортное средство присутствует. Пороговое значение r12 и пороговое значение th12 задаются заранее посредством эксперимента и т.п.
Математическое выражение 4

[0034] В примере, показанном на Фиг. 4, задается граница B определения (например, уравнение, выражающее граничную линию), указываемая посредством пунктирной линии N, и когда взаимосвязь между значением R11 автокорреляции и значением R22 автокорреляции находится внутри границы B определения, определяется то, что приближающееся транспортное средство существует. Здесь может использоваться любой способ определения, который исключает все из случая, в котором только значение автокорреляции второго микрофона увеличивается вследствие шума и т.п. (распределение указано посредством символа N1), случая, в котором только значение автокорреляции первого микрофона 11 увеличивается вследствие шума и т.п. (распределение указано посредством символа N2), и случая, в котором значение автокорреляции первого микрофона 11 и значение автокорреляции второго микрофона снижаются вследствие окружающего шума (распределение указано посредством символа N3). Наличие приближающегося транспортного средства может быть определено даже из небольшого звука при движении посредством расширения диапазона границы B определения влево и вниз. Таким образом, приближающееся транспортное средство может быть обнаружено раньше, и может определяться наличие приближающегося транспортного средства, расположенного еще дальше. Тем не менее, когда граница B определения понижается чрезмерно, окружающий шум может быть обнаружен ошибочно.
[0035] В этой связи, в случае если используется значение автокорреляции только одного микрофона, поскольку значение автокорреляции микрофона может увеличиваться вследствие шума и т.п., как описано выше, необходимо обеспечивать то, что порог не задается слишком низким, чтобы предотвращать ошибочное обнаружение в такие моменты времени. С другой стороны, когда используются значения автокорреляции двух или более микрофонов, корреляционная взаимосвязь между значениями автокорреляции может быть определена, и, следовательно, время обнаружения приближающегося транспортного средства может продвигаться вперед посредством понижения условия определения.
[0036] Когда наличие приближающегося транспортного средства определено на основе значения автокорреляции первого микрофона 11 и значения автокорреляции второго микрофона 12, модуль 21f обнаружения транспортных средств использует значение взаимной корреляции, вычисленное посредством модуля 21e вычисления взаимной корреляции, для того, чтобы обнаруживать направление приближения, относительное расстояние и т.д. приближающегося транспортного средства на основе разности времени поступления, при которой взаимная корреляция принимает максимальное значение. Традиционный способ применяется к этой операции обнаружения с использованием значения взаимной корреляции.
[0037] Следует отметить, что в случае, если используется значение взаимной корреляции, может быть определено, что приближающееся транспортное средство присутствует, когда значение взаимной корреляции превышает пороговое значение. Взаимная корреляция имеет меньшую надежность касательно отношения "сигнал-шум", чем автокорреляция, и, следовательно, пороговое значение определения взаимной корреляции должно задаваться выше порогового значения определения, используемого с автокорреляцией. Когда пороговое значение увеличивается таким образом, наличие приближающегося транспортного средства не может быть определено до тех пор, пока звук при движении не будет усилен до определенной степени, и, следовательно, время обнаружения приближающегося транспортного средства задерживается.
[0038] После этого ECU 21 формирует информацию о приближающемся транспортном средстве на основе результата обнаружения, полученного посредством модуля 21f обнаружения транспортных средств, и передает информацию о приближающемся транспортном средстве в устройство помощи при вождении. Информация о приближающемся транспортном средстве является информацией, указывающей, например, наличие приближающегося транспортного средства, и когда приближающееся транспортное средство присутствует, направление его приближения и его относительное расстояние до рассматриваемого транспортного средства.
[0039] Ссылаясь на Фиг. 1-4, описывается работа функции обнаружения приближающихся транспортных средств устройства 1 обнаружения приближающихся транспортных средств. В частности, обработка, выполняемая посредством ECU 21, описывается с использованием блок-схемы последовательности операций способа, показанной на Фиг. 5. Фиг. 5 является блок-схемой последовательности операций способа, показывающей последовательность операций обработки обнаружения приближающихся транспортных средств, выполняемой посредством ECU согласно первому варианту осуществления.
[0040] Когда устройство 1 обнаружения приближающихся транспортных средств работает, микрофоны 11, 12, соответственно, собирают периферийные звуки снаружи транспортного средства с кадровыми интервалами, преобразуют собираемые звуки в аудиосигналы (электрические сигналы) и передают аудиосигналы в ECU 21. Соответствующие аудиосигналы текущего кадра(t) вводятся в ECU 21 из микрофонов 11, 12 (S10).
[0041] ECU 21 преобразует соответствующие аудиосигналы в цифровые сигналы и извлекает конкретную полосу частот (полосу частот, включающую в себя полосу частот звука при движении транспортного средства) из цифровых аудиосигналов (S11).
[0042] После этого ECU 21 вычисляет значение автокорреляции с использованием данных временных рядов аудиосигнала из первого микрофона 11 и вычисляет значение автокорреляции с использованием данных временных рядов аудиосигнала из второго микрофона 12 (S12). ECU 21 затем определяет то, удовлетворяют или нет значение автокорреляции первого микрофона 11 и значение автокорреляции второго микрофона 12 предварительно определенному условию (S13). Когда на S13 определяется то, что предварительно определенное условие не удовлетворяется, ECU 21 определяет то, что приближающееся транспортное средство отсутствует. ECU 21 затем ожидает в течение предварительно определенного времени и после этого выполняет обработку относительно следующего кадра (t+1) (S17).
[0043] Когда на S13 определяется то, что предварительно определенное условие удовлетворяется, ECU 21 определяет то, что приближающееся транспортное средство присутствует (S14). После этого ECU 21 вычисляет значение взаимной корреляции (CSP-коэффициент) с использованием данных временных рядов аудиосигнала из первого микрофона 11 и данных временных рядов аудиосигнала из второго микрофона 12 (S15). ECU 21 затем указывает направление приближения и т.д. приближающегося транспортного средства на основе значения взаимной корреляции (S16). ECU 21 затем ожидает в течение предварительно определенного времени и после этого выполняет обработку относительно следующего кадра (t+1) (S17).
[0044] После этого ECU 21 формирует информацию о приближающемся транспортном средстве на основе результата определения, полученного на S13, и результата обнаружения, полученного на S16, и передает информацию о приближающемся транспортном средстве в устройство помощи при вождении.
[0045] В устройстве 1 обнаружения приближающихся транспортных средств, значения автокорреляции звуков, собираемых посредством микрофонов 11, 12, вычисляются и используются для того, чтобы определять звук при движении приближающегося транспортного средства. Следовательно, демонстрируется высокая надежность касательно отношения "сигнал-шум", приводя к улучшенным рабочим характеристикам обнаружения приближающихся транспортных средств. В частности, в случае если приближающееся транспортное средство приближается постепенно, так что громкость звука при движении постепенно возрастает, при движении может быть определен меньший звук, чем при традиционном способе с использованием взаимной корреляции, и, как результат, время обнаружения приближающегося транспортного средства может продвигаться вперед.
[0046] Согласно устройству 1 обнаружения приближающихся транспортных средств, в частности, предоставляются два (множество) микрофона 11, 12, так что используются значения автокорреляции соответствующих микрофонов 11, 12, и, следовательно, надежность касательно отношения "сигнал-шум", в частности, является высокой, приводя к дополнительному улучшению рабочих характеристик обнаружения, демонстрируемых при обнаружении звука при движении приближающегося транспортного средства. Например, когда значение автокорреляции одного микрофона увеличивается, но значение автокорреляции другого микрофона остается низким, может определяться шум и, следовательно, повышение точности обнаружения может быть получено по сравнению со случаем, в котором используется значение автокорреляции одного микрофона. Дополнительно, определение выполняется на основе корреляционной взаимосвязи между значениями автокорреляции двух микрофонов 11, 12 и, следовательно, условие определения (пороговое значение) для определения звука при движении может быть понижено по сравнению со случаем, в котором используется значение автокорреляции одного микрофона. Как результат, звук при движении может быть определен раньше.
[0047] Кроме того, согласно устройству 1 обнаружения приближающихся транспортных средств, значение взаимной корреляции между звуками, собираемыми, соответственно, посредством двух микрофонов 11, 12, также вычисляется и используется, и, следовательно, направление приближения и относительное расстояние приближающегося транспортного средства также могут быть обнаружены. Кроме того, согласно устройству 1 обнаружения приближающихся транспортных средств, посредством использования как значения автокорреляции, так и значения взаимной корреляции, может предотвращаться ситуация, в которой ошибочное обнаружение получается из значения взаимной корреляции на основе результата определения, полученного из значений автокорреляции. Как результат, повышается надежность результата обнаружения, полученного из значения взаимной корреляции.
[0048] Ссылаясь на Фиг. 6 и 7, описывается устройство 2 обнаружения приближающихся транспортных средств согласно второму варианту осуществления. Фиг. 6 является видом, показывающим конфигурацию устройства обнаружения приближающихся транспортных средств согласно второму варианту осуществления. Фиг. 7 является видом, показывающим пример диаграммы рассеивания значений автокорреляции аудиосигналов из двух микрофонов, когда второй микрофон выходит из строя.
[0049] Устройство 2 обнаружения приближающихся транспортных средств отличается от устройства 1 обнаружения приближающихся транспортных средств согласно первому варианту осуществления только наличием функции определения неисправности микрофонов. Устройство 2 обнаружения приближающихся транспортных средств определяет неисправность микрофона с использованием автокорреляций двух микрофонов. Соответственно, во втором варианте осуществления, описывается только функция определения неисправности микрофонов. Устройство 2 обнаружения приближающихся транспортных средств включает в себя первый микрофон 11, второй микрофон 12 и ECU 22 (первый модуль 21a аналого-цифрового преобразования, второй модуль 21b аналого-цифрового преобразования, первый модуль 21c вычисления автокорреляции, второй модуль 21d вычисления автокорреляции, модуль 21e вычисления взаимной корреляции, модуль 21f обнаружения транспортных средств и модуль 22a определения неисправности). Во втором варианте осуществления, модуль 22a определения неисправности соответствует средству определения неисправности, описанному в формуле изобретения.
[0050] ECU 22 представляет собой ECU, состоящий из CPU, ROM, RAM и т.д., и выполняет общее управление устройством 2 обнаружения приближающихся транспортных средств. Первый модуль 21a аналого-цифрового преобразования, второй модуль 21b аналого-цифрового преобразования, первый модуль 21c вычисления автокорреляции, второй модуль 21d вычисления автокорреляции, модуль 21e вычисления взаимной корреляции, модуль 21f обнаружения транспортных средств и модуль 22a определения неисправности предоставляются в ECU 22. Здесь описывается только модуль 22a определения неисправности.
[0051] Типично, когда микрофон выходит из строя (например, разъединяется), микрофон может выводить звуки только идентичного уровня, и, следовательно, его значение автокорреляции принимает нерегулярное значение (например, чрезвычайно небольшое значение или чрезвычайно большое значение). Фиг. 7 показывает случай, когда второй микрофон 12 выходит из строя, так что в итоге значение автокорреляции второго микрофона 12 принимает чрезвычайно небольшое значение и практически не демонстрирует варьирования (эллиптическое распределение указано посредством условного обозначения D) независимо от варьирования значения автокорреляции первого микрофона. Следует отметить, что Фиг. 7 также показывает распределение, полученное, когда второй микрофон 12 является нормальным, аналогично Фиг. 2-4. Дополнительно, когда микрофон выходит из строя, звуки могут выводиться произвольно, так что значение автокорреляции принимает случайное значение. В этом случае, когда значения автокорреляции двух микрофонов распределены, значения распределены по всей области. Когда варьирование значения автокорреляции нормального микрофона и варьирование значения автокорреляции вышедшего из строя микрофона сравниваются в таком случае, отсутствует корреляционная взаимосвязь (взаимосвязь, при которой увеличение одного приводит к увеличению другого) между двумя значениями автокорреляции, и два значения автокорреляции варьируются безусловно различными способами.
[0052] Модуль 22a определения неисправности сравнивает варьирование в течение предварительно определенного времени значения автокорреляции первого микрофона 11, вычисленного посредством первого модуля 21c вычисления автокорреляции, с варьированием в течение предварительно определенного времени значения автокорреляции второго микрофона 12, вычисленного посредством второго модуля 21d вычисления автокорреляции. Когда значение автокорреляции одного микрофона варьируется, а значение автокорреляции другого микрофона практически не демонстрирует варьирования, модуль 22a определения неисправности определяет то, что другой микрофон вышел из строя и, следовательно, прекращает использование другого микрофона, так что устройство 2 обнаружения приближающихся транспортных средств продолжает работать с использованием только одного микрофона. В этом случае, обнаружение выполняется с использованием только одного микрофона и, следовательно, только значение автокорреляции может быть определено и использовано для того, чтобы определять наличие приближающегося транспортного средства. Дополнительно, когда варьирование значения автокорреляции одного микрофона и варьирование значения автокорреляции другого микрофона декоррелируются (т.е. распределены по всей области, как описано выше), модуль 22a определения неисправности определяет то, что один из двух микрофонов вышел из строя и, следовательно, прекращает работу устройства 2 обнаружения приближающихся транспортных средств.
[0053] Ссылаясь на Фиг. 6 и 7, описывается работа функции определения неисправности устройства 2 обнаружения приближающихся транспортных средств. В частности, обработка, выполняемая посредством ECU 22, описывается с использованием блок-схемы последовательности операций способа, показанной на Фиг. 8. Фиг. 8 является блок-схемой последовательности операций способа, показывающей последовательность операций обработки определения неисправности микрофонов, выполняемой посредством ECU согласно второму варианту осуществления. Следует отметить, что функция определения неисправности работает только тогда, когда транспортное средство начинает движение, и в силу этого определение выполняется с использованием аудиосигналов, выводимых посредством соответствующих микрофонов 11, 12 в течение предварительно определенного времени (достаточно длительного времени для того, чтобы получать достаточное число аудиосигналов (значений автокорреляции), чтобы иметь возможность определять неисправность микрофона) в то время, когда транспортное средство начинает движение.
[0054] Когда транспортное средство начинает движение так, что устройство 2 обнаружения приближающихся транспортных средств работает, микрофоны 11, 12, соответственно, собирают периферийные звуки снаружи транспортного средства, преобразуют собираемые звуки в аудиосигналы (электрические сигналы) и передают аудиосигналы в ECU 22. Соответствующие аудиосигналы вводятся в ECU 22 из микрофонов 11, 12 (S20). ECU 22 преобразует соответствующие аудиосигналы в цифровые сигналы и извлекает конкретную полосу частот из цифровых аудиосигналов (S21).
[0055] ECU 22 затем вычисляет значение автокорреляции с использованием данных временных рядов аудиосигнала из первого микрофона 11 и вычисляет значение автокорреляции с использованием данных временных рядов аудиосигнала из второго микрофона 12 (S22).
[0056] ECU 22 затем определяет то, возникла или нет неисправность микрофона (S24), посредством сравнения варьирования значения автокорреляции первого микрофона 11 с варьированием значения автокорреляции второго микрофона 12 (S23). Когда на S24 определяется то, что неисправность микрофона возникла (S25), ECU 22 прекращает работу устройства 2 обнаружения приближающихся транспортных средств в случае, если вышедший из строя микрофон не может быть указан, и прекращает использование вышедшего из строя микрофона в случае, если вышедший из строя микрофон может быть указан, так что устройство 2 обнаружения приближающихся транспортных средств продолжает работать с использованием только невышедшего из строя микрофона. Когда ECU 22 определяет на S24 то, что микрофоны являются нормальными (S26), работа устройства 2 обнаружения приближающихся транспортных средств продолжается.
[0057] Устройство 2 обнаружения приближающихся транспортных средств демонстрирует следующие эффекты в дополнение к аналогичному преимуществу с устройством 1 обнаружения приближающихся транспортных средств согласно первому варианту осуществления. Согласно устройству 2 обнаружения приближающихся транспортных средств, неисправность микрофона может быть определена с использованием значений автокорреляции двух микрофонов 11, 12. Как результат, может предотвращаться ошибочное обнаружение, вызываемое посредством неисправности микрофона.
[0058] Ссылаясь на Фиг. 9 и 10, описывается устройство 3 обнаружения приближающихся транспортных средств согласно третьему варианту осуществления. Фиг. 9 является видом, показывающим конфигурацию устройства обнаружения приближающихся транспортных средств согласно третьему варианту осуществления. Фиг. 10 является видом, показывающим пример временного варьирования значения автокорреляции аудиосигнала одного микрофона.
[0059] Устройство 3 обнаружения приближающихся транспортных средств вычисляет автокорреляцию из звуков, собираемых посредством одного микрофона, и использует автокорреляцию для того, чтобы определять наличие приближающегося транспортного средства. Устройство 3 обнаружения приближающихся транспортных средств включает в себя микрофон 13 и ECU 23 (модуль 23a аналого-цифрового преобразования, модуль 23b вычисления автокорреляции и модуль 23c обнаружения транспортных средств).
[0060] Следует отметить, что в третьем варианте осуществления, микрофон 13 соответствует, по меньшей мере, одному модулю сбора звука, описанному в формуле изобретения, модуль 23b вычисления автокорреляции соответствует средству вычисления автокорреляции, описанному в формуле изобретения, и модуль 23c обнаружения транспортных средств соответствует средству определения, описанному в формуле изобретения.
[0061] Микрофон 13 располагается в передней концевой части транспортного средства (например, в центральной позиции транспортного средства). Микрофон 13 собирает звуки с кадровыми интервалами и выводит аудиосигналы в ECU 23.
[0062] ECU 23 представляет собой ECU, состоящий из CPU, ROM, RAM и т.д., и выполняет общее управление устройством 3 обнаружения приближающихся транспортных средств. Модуль 23a аналого-цифрового преобразования, модуль 23b вычисления автокорреляции и модуль 23c обнаружения транспортных средств предоставляются в ECU 23. Аудиосигналы вводятся в ECU 23 из одного микрофона 13 с кадровыми интервалами, после чего различные типы обработки выполняются посредством соответствующих процессоров 23a, 23b, 23c с использованием аудиосигналов.
[0063] Модуль 23a аналого-цифрового преобразования выполняет аналогичную обработку с модулями 21a, 21b аналого-цифрового преобразования согласно первому варианту осуществления для аудиосигнала (аналогового сигнала) из микрофона 13 с кадровыми интервалами. Модуль 23b вычисления автокорреляции выполняет аналогичную обработку с модулями 21c, 21d вычисления автокорреляции согласно первому варианту осуществления для аудиосигнала (цифрового сигнала) из микрофона 13, преобразованного посредством модуля 23a аналого-цифрового преобразования, с кадровыми интервалами.
[0064] Модуль 23c обнаружения транспортных средств определяет то, превышает или нет значение автокорреляции микрофона 13, вычисленное посредством модуля 23b вычисления автокорреляции, пороговое значение, и когда значение автокорреляции превышает пороговое значение, определяет то, что приближающееся транспортное средство (звук при движении испускается посредством транспортного средства), присутствует. Пороговое значение задается заранее посредством эксперимента.
[0065] Фиг. 10 показывает пример временного варьирования значения автокорреляции, при этом время показывается на абсциссе, а значение автокорреляции показывается на ординате. Как показано на Фиг. 10, когда микрофон 13 собирает только окружающий шум, значение автокорреляции принимает низкое значение, но когда микрофон 13 начинает собирать звук при движении из приближающегося транспортного средства, значение автокорреляции увеличивается (выступающие части указаны посредством условного обозначения C) таким образом, что оно становится явно превышающим значения автокорреляции, полученные из окружающего шума. Значение автокорреляции также может увеличиваться вследствие пикового шума (части указаны посредством условного обозначения S). Вышеуказанное пороговое значение задается посредством эксперимента равным значению, при котором значение автокорреляции, полученное из звука при движении, может различаться не только из значения автокорреляции, полученного из окружающего шума, но также и из значения автокорреляции, полученного из этого пикового шума. В этой связи, в случае если используются два (множество) микрофона, аналогично первому варианту осуществления, наличие приближающегося транспортного средства определяется с использованием корреляционной взаимосвязи между значениями автокорреляции двух микрофонов, и, следовательно, высокоточное определение может выполняться, даже когда условие определения (пороговое значение) понижается, так что значение автокорреляции одного микрофона увеличивается посредством пикового шума.
[0066] Ссылаясь на Фиг. 9 и 10, описывается работа функции обнаружения приближающихся транспортных средств устройства 3 обнаружения приближающихся транспортных средств. В частности, обработка, выполняемая посредством ECU 23, описывается с использованием блок-схемы последовательности операций способа, показанной на Фиг. 11. Фиг. 11 является блок-схемой последовательности операций способа, показывающей последовательность операций обработки обнаружения приближающихся транспортных средств, выполняемой посредством ECU согласно третьему варианту осуществления.
[0067] Когда устройство 3 обнаружения приближающихся транспортных средств работает, микрофон 13 собирает периферийные звуки снаружи транспортного средства с кадровыми интервалами, преобразует собираемые звуки в аудиосигналы (электрические сигналы) и передает аудиосигналы в ECU 23. Аудиосигнал текущего кадра(t) вводится в ECU 23 из микрофона 13 (S30).
[0068] ECU 23 преобразует аудиосигнал в цифровой сигнал и извлекает конкретную полосу частот из цифрового аудиосигнала (S31).
[0069] ECU 23 затем вычисляет значение автокорреляции с использованием данных временных рядов аудиосигнала из микрофона 13 (S32). После этого ECU 23 определяет то, превышает или нет значение автокорреляции микрофона 13 пороговое значение (S33). Когда на S33 определяется то, что значение автокорреляции меньше порогового значения, ECU 23 определяет то, что приближающееся транспортное средство отсутствует и, следовательно, ожидает в течение предварительно определенного времени и после этого выполняет обработку относительно следующего кадра (t+1) (S35). Когда на S33 определяется то, что значение автокорреляции превышает пороговое значение, ECU 23 определяет то, что приближающееся транспортное средство присутствует (S34). ECU 23 затем ожидает в течение предварительно определенного времени и после этого выполняет обработку относительно следующего кадра (t+1) (S35).
[0070] После этого ECU 21 формирует информацию о приближающемся транспортном средстве на основе результата определения, полученного на S33, и передает информацию о приближающемся транспортном средстве в устройство помощи при вождении.
[0071] Согласно устройству 3 обнаружения приближающихся транспортных средств, наличие приближающегося транспортного средства может быть обнаружено в чрезвычайно простой конфигурации системы с использованием одного микрофона 13. Дополнительно, согласно устройству 3 обнаружения приближающихся транспортных средств, посредством вычисления значения автокорреляции звука, собираемого посредством микрофона 13, и использования значения автокорреляции для того, чтобы определять звук при движении из приближающегося транспортного средства, демонстрируется высокая надежность касательно отношения "сигнал-шум", приводя к улучшению рабочих характеристик обнаружения приближающихся транспортных средств.
[0072] Выше описаны варианты осуществления изобретения, но изобретение не ограничено вышеописанными вариантами осуществления и может быть реализовано в различных других вариантах осуществления.
[0073] Например, в вышеописанных вариантах осуществления, устройство обнаружения источника звука применяется к устройству обнаружения приближающихся транспортных средств, которое обнаруживает приближающееся транспортное средство (при этом звук при движении от транспортного средства служит в качестве источника звука), но устройство обнаружения источника звука может применяться к устройству, которое обнаруживает источник звука, отличный от транспортного средства. Дополнительно, в вышеописанных вариантах осуществления, информация, связанная с обнаруженным приближающимся транспортным средством, предоставляется в устройство помощи при вождении, но может использоваться другая конфигурация. Например, функция обнаружения приближающихся транспортных средств может быть включена в устройство помощи при вождении, или функция предупреждения и т.п. может предоставляться в устройстве обнаружения приближающихся транспортных средств.
[0074] Кроме того, в вышеописанных вариантах осуществления, предоставляются два микрофона (модуля сбора звука), и как автокорреляция, так и взаимная корреляция вычисляется с использованием звуков, собираемых, соответственно, посредством двух микрофонов. Тем не менее, могут предоставляться три или более микрофонов, так что автокорреляция и взаимная корреляция вычисляются с использованием звуков, собираемых, соответственно, посредством трех микрофонов. Точность обнаружения повышается постоянно по мере того, как возрастает число микрофонов.
[0075] Кроме того, в первом варианте осуществления, значение автокорреляции вычисляется и используется для того, чтобы определять наличие приближающегося транспортного средства, и когда определяется, что приближающееся транспортное средство присутствует, значение взаимной корреляции вычисляется и используется для того, чтобы указывать направление приближения и т.д. Тем не менее, вместо этого, значение автокорреляции и значение взаимной корреляции могут быть вычислены параллельно, так что определение с использованием значения автокорреляции и определение с использованием значения взаимной корреляции выполняются параллельно, после чего наличие и направление приближения приближающегося транспортного средства указываются на основе двух результатов определения.
[0076] Кроме того, во втором варианте осуществления, определение неисправности микрофонов выполняется, когда транспортное средство начинает движение, но может выполняться периодически по мере того, как движется транспортное средство.
Промышленная применимость
[0077] Согласно изобретению, в устройстве обнаружения источника звука, которое обнаруживает источник звука обнаруживаемого объекта на основе собираемых звуков, автокорреляция собираемого звука вычисляется и используется для того, чтобы обнаруживать источник звука обнаруживаемого объекта и, следовательно, демонстрируется высокая надежность касательно отношения "сигнал-шум", приводя к улучшенным рабочим характеристикам обнаружения при обнаружении источника звука обнаруживаемого объекта.
[0078] 1, 2, 3 - устройство обнаружения приближающихся транспортных средств
11 - первый микрофон
12 - второй микрофон
13 - микрофон
21, 22, 23 - ECU
21a - первый модуль аналого-цифрового преобразования
21b - второй модуль аналого-цифрового преобразования
21c - первый модуль вычисления автокорреляции
21d - второй модуль вычисления автокорреляции
21e - модуль вычисления взаимной корреляции
21f, 23c - модуль обнаружения транспортных средств
22a - модуль определения неисправности
23а - модуль аналого-цифрового преобразования
23b - модуль вычисления автокорреляции.
Реферат
Изобретение относится к метрологии, в частности к средствам обнаружения источников звука. Устройство содержит микрофоны для приема звуковых сигналов, аналого-цифровые преобразователи, два средства вычисления автокорреляции между звуками, модуль вычисления взаимной корреляции, средство обнаружения источника звука, в частности, приближающегося транспортного средства, модуль определения неисправности. Средство вычисления автокорреляции вычисляет значение автокорреляции между сигналами, принимаемыми от первого и второго микрофонов, средство определения определяет больше ли значение автокорреляции первого модуля сбора звука, чем первое пороговое значение, и больше ли значение автокорреляции второго модуля сбора звука, чем второе пороговое значение, и определяет наличие приближающегося транспортного средства, когда значение автокорреляции первого модуля сбора звука больше, чем первое пороговое значение, а значение автокорреляции второго модуля сбора звука больше, чем второе пороговое значение. Средство определения неисправности функционирует посредством сравнения изменения значения автокорреляции первого модуля сбора звука с изменением значения автокорреляции второго модуля сбора звука. Технический результат - улучшение характеристик обнаружения источников звука. 11 ил.
Формула
- по меньшей мере, один модуль сбора звука;
- средство вычисления автокорреляции для вычисления автокорреляции между звуками, собираемыми во временных рядах посредством модуля сбора звука; и
- средство определения для определения того, присутствует или нет источник звука обнаруживаемого объекта, на основе автокорреляции, вычисленной посредством средства вычисления автокорреляции, причем устройство обнаружения источника звука отличается тем, что:
устройство обнаружения источника звука установлено в транспортном средстве;
по меньшей мере один модуль сбора звука включает в себя первый модуль сбора звука и второй модуль сбора звука;
средство вычисления автокорреляции вычисляет значение автокорреляции первого модуля сбора звука и значение автокорреляции второго модуля сбора звука;
средство определения определяет, больше ли значение автокорреляции первого модуля сбора звука, чем первое пороговое значение, и больше ли значение автокорреляции второго модуля сбора звука, чем второе пороговое значение, и определяет, что другое транспортное средство, приближающееся к упомянутому транспортному средству, присутствует, когда значение автокорреляции первого модуля сбора звука больше, чем первое пороговое значение, а значение автокорреляции второго модуля сбора звука больше, чем второе пороговое значение; и
устройство обнаружения источника звука дополнительно содержит средство определения неисправности для определения неисправности в первом модуле сбора звука или втором модуле сбора звука посредством сравнения изменения значения автокорреляции первого модуля сбора звука с изменением значения автокорреляции второго модуля сбора звука.
Комментарии