Устройство и способ для подавления многоканальных взаимных помех - RU2735131C1
Код документа: RU2735131C1
Чертежи











Описание
Настоящее изобретение относится к обработке аудиосигналов и, в частности, к устройству и способу для сокращения сложности подавления многоканальных взаимных помех и для низкой сложности подавления многоканальных взаимных помех.
Современные устройства связи, применяемые со свободными руками, используют несколько сигналов микрофонов, например, для улучшения речи, выявления геометрии помещения или автоматического распознавания речи. Эти устройства находятся в диапазоне от активируемых голосом помощников, интеллектуальных бытовых устройств и интеллектуальных динамиков до смартфонов, планшетов или персональных компьютеров. Многие интеллектуальные устройства, такие как активируемые голосом помощники, смартфоны, планшеты или персональные компьютеры, оборудованы громкоговорителями. В таких устройствах, например, в устройстве, в котором интегрирован по меньшей мере один громкоговоритель, к выходу каждого микрофона применяется блок подавления акустических помех, чтобы сократить электроакустическую связь.
Подавление акустического эха (AEC) (см., например, [1]) является наиболее широко используемой методикой для сокращения электроакустической связи между громкоговорителем (громкоговорителями) и микрофоном (микрофонами) в оборудовании связи, применяемом со свободными руками. В таком оборудовании микрофоны в дополнение к целевой речи на ближнем конце захватывают акустическое эхо и фоновый шум. Технология AEC использует адаптивные методики фильтрации (см., например, [2]) для оценки акустических импульсных характеристик (acoustic impulse response; AIR) между громкоговорителем (громкоговорителями) и микрофоном (микрофонами). Затем вычисляются оценки акустического эха посредством фильтрации доступного сигнала громкоговорителей с помощью оценочных характеристик AIR. Наконец, оценочное акустическое эхо вычитается из сигналов микрофонов, в результате чего реализуется подавление акустического эха.
В частном случае подавления акустического эха (AEC) электроакустическая связь вызвана сигналом диктора на дальнем конце, который воспроизводится громкоговорителем. Также в упомянутых выше устройствах связи, применяемых со свободными руками, она может быть вызвана посредством собственной обратной связи устройства, музыки или голосового помощника. Наиболее непосредственное решение для сокращения электроакустической связи между громкоговорителем и микрофонами состоит в том, чтобы разместить блок подавления акустических взаимных помех на выходе каждого микрофона (см., например, [3]).
Относительные передаточные функции (relative transfer function; RTF) моделируют отношение между характеристиками AIR в частотной области, обычно обозначаемыми как акустические передаточные функции (acoustic transfer function; ATF). Функции RTF обычно используются в контексте улучшения речи с несколькими микрофонами (см., например, [5], [8], [12]). Что касается более соответствующих применений, оценка относительных передаточных функций разностного эха использовалась в [13], [14], чтобы оценить спектральную плотность мощности разностного эха, например, акустические компоненты эха, которые остаются после подавления первичного канала. Чтобы улучшить процесс оценки, используется второй сигнал микрофона. Предложенный в [13], [14] способ оценивает отношение между первичным сигналом после подавления и вторичным сигналом микрофона, обеспечивая отношение между ошибкой в оценке первичной характеристики AIR и вторичной характеристики AIR. Наконец, относительная передаточная функция разностного эха используется для вычисления спектральной плотности мощности первичного разностного акустического эха.
Что касается конкретного применения обработки массива микрофонов, были представлены несколько методик, которые нацелены на сокращение сложности всех речевых алгоритмов улучшения, например, пространственной фильтрации, объединенной с AEC. Например, использование единственного AEC, помещенного на выход пространственного фильтра, было сначала изучено в [3], [15]. Некоторые альтернативные методы, которые нацелены на объединение подавления акустического эха и обработку массива микрофонов, были предложены в [8], [16], [18].
Поскольку сложность блока подавления акустических взаимных помех с несколькими микрофонами пропорциональна количеству микрофонов, для многих современных устройств такое увеличение сложности является не достижимым.
Таким образом, будет высоко оценено обеспечение концепций с низкой сложностью для подавления многоканальных взаимных помех.
Задача настоящего изобретения состоит в том, чтобы обеспечить концепции с низкой сложностью для подавления многоканальных взаимных помех. Задача настоящего изобретения решается с помощью устройства по п. 1, способа по п. 14 и компьютерной программы по п. 15 формулы изобретения.
Обеспечено устройство для подавления многоканальных взаимных помех в принятом аудиосигнале, содержащем два или более принятых аудиоканалов, для получения модифицированного аудиосигнала, содержащего два или более модифицированных аудиоканалов, в соответствии с вариантом осуществления.
Устройство содержит первый блок фильтра, выполненный с возможностью формировать первую оценку первого сигнала взаимных помех в зависимости от опорного сигнала.
Кроме того, устройство содержит первый блок подавления взаимных помех, выполненный с возможностью формировать первый модифицированный аудиоканал из двух или более модифицированных аудиоканалов на основе первого принятого аудиоканала из двух или более принятых аудиоканалов в зависимости от первой оценки первого сигнала взаимных помех.
Кроме того, устройство содержит второй блок фильтра, выполненный с возможностью формировать вторую оценку второго сигнала взаимных помех в зависимости от первой оценки первого сигнала взаимных помех.
Кроме того, устройство содержит второй блок подавления взаимных помех, выполненный с возможностью формировать второй модифицированный аудиоканал из двух или более модифицированных аудиоканалов на основе второго принятого аудиоканала из двух или более принятых аудиоканалов в зависимости от второй оценки второго сигнала взаимных помех.
Варианты осуществления обеспечивают концепции, например, устройство и способ для подавления многоканальных взаимных помех с использованием относительных передаточных функций.
Например, для технологии AEC концепции в соответствии с вариантами осуществления используют оценку первичного сигнала акустического эха, чтобы вычислить оценки оставшихся, или вторичных, сигналов акустического эха. Чтобы сделать это, идентифицируется отношение между первичными акустическими импульсными характеристиками (AIR), например, характеристиками AIR между громкоговорителем и первичными микрофонами, и вторичными характеристиками AIR, например, характеристиками AIR между громкоговорителем и вторичными микрофонами. Затем вычисляются вторичные сигналы акустического эха посредством фильтрации первичного сигнала акустического эха с помощью оценочного отношения между характеристиками AIR. Наконец, подавление применяется к каждому сигналу микрофона. Если расстояние между микрофонами мало, эти отношения могут быть смоделированы с использованием относительно коротких фильтров. Таким образом, вычислительная сложность может быть сокращена.
Кроме того, обеспечен способ для подавления многоканальных взаимных помех в принятом аудиосигнале, содержащем два или более принятых аудиоканалов, для получения модифицированного аудиосигнала, содержащего два или более модифицированных аудиоканалов, в соответствии с вариантом осуществления.
Способ содержит:
- Формирование первой оценки первого сигнала взаимных помех в зависимости от опорного сигнала.
- Формирование первого модифицированного аудиоканала из двух или более модифицированных аудиоканалов на основе первого принятого аудиоканала из двух или более принятых аудиоканалов в зависимости от первой оценки первого сигнала взаимных помех.
- Формирование второй оценки второго сигнала взаимных помех в зависимости от первой оценки первого сигнала взаимных помех.
- Формирование второго модифицированного аудиоканала из двух или более модифицированных аудиоканалов на основе второго принятого аудиоканала из двух или более принятых аудиоканалов в зависимости от второй оценки второго сигнала взаимных помех.
Кроме того, обеспечена компьютерная программа, причем компьютерная программа выполнена с возможностью реализовывать описанный выше способ при ее исполнении на компьютерном процессоре или процессоре сигналов.
Далее варианты осуществления настоящего изобретения описаны более подробно со ссылкой на фигуры.
Фиг. 1a иллюстрирует устройство для подавления многоканальных взаимных помех в соответствии с вариантом осуществления,
Фиг. 1b иллюстрирует устройство для подавления многоканальных взаимных помех в соответствии с другим вариантом осуществления,
Фиг. 1c иллюстрирует устройство для подавления многоканальных взаимных помех в соответствии с дополнительным вариантом осуществления,
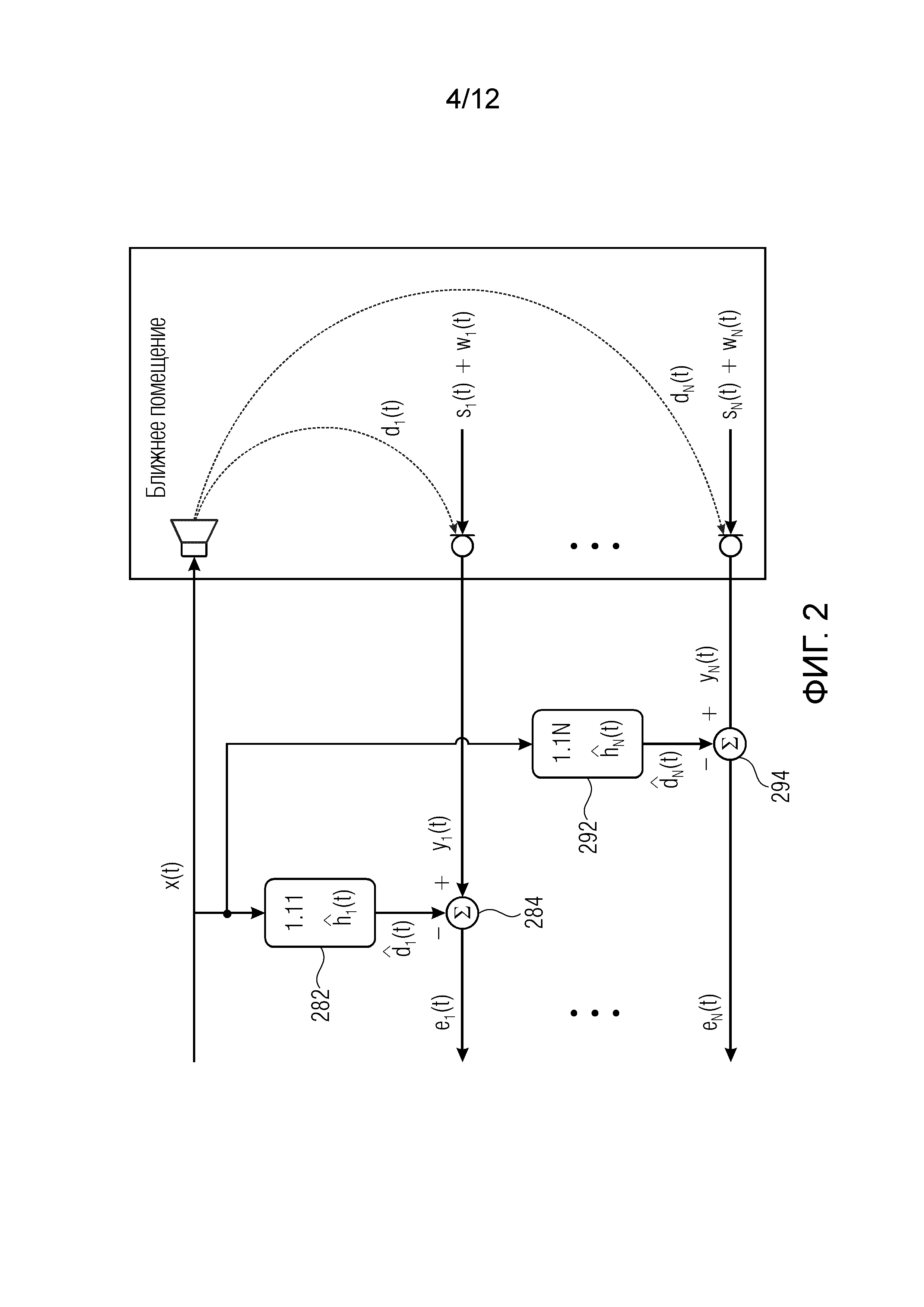
Фиг. 2 иллюстрирует методику AEC с несколькими микрофонами,
Фиг. 3 иллюстрирует методику AEC с несколькими микрофонами в соответствии с вариантом осуществления,
Фиг. 4 иллюстрирует методику AEC с несколькими микрофонами в области STFT,
Фиг. 5 иллюстрирует методику AEC с несколькими микрофонами в области STFT в соответствии с вариантом осуществления,
Фиг. 6 изображает результаты, соответствующие моделированиям с усеченными характеристиками AIR,
Фиг. 7 изображает сравнение методики AEC на основе функции AETF и функции RETF с

Фиг. 8 иллюстрирует сравнение между подходами AEC на основе функции AETF и функции RETF с

Фиг. 1a иллюстрирует устройство для подавления многоканальных взаимных помех в соответствии с вариантом осуществления.
Устройство содержит первый блок 112 фильтра, выполненный с возможностью формировать первую оценку


Кроме того, устройство содержит первый блок 114 подавления взаимных помех, выполненный с возможностью формировать первый модифицированный аудиоканал


Кроме того, устройство содержит второй блок 122 фильтра, выполненный с возможностью формировать вторую оценку

Кроме того, устройство содержит второй блок 124 подавления взаимных помех, выполненный с возможностью формировать второй модифицированный аудиоканал


Варианты осуществления основаны на обнаружении того факта, что первая оценка первого сигнала взаимных помех может использоваться для формирования второй оценки второго сигнала взаимных помех. Повторное использование первой оценки первого сигнала взаимных помех для определения второй оценки второго сигнала взаимных помех сокращает вычислительную сложность по сравнению с решениями, которые формируют вторую оценку второго сигнала взаимных помех посредством использования опорного сигнала вместо того, чтобы использовать первую оценку первого сигнала взаимных помех.
Некоторые варианты осуществления относятся к подавлению акустического эха (AEC).
В варианте осуществления первая оценка первого сигнала взаимных помех, например, может представлять собой первую оценку первого сигнала акустического эха, вторая оценка второго сигнала взаимных помех представляет собой вторую оценку второго сигнала акустического эха.
Первый блок 114 подавления взаимных помех, например, может быть выполнен с возможностью проводить подавление акустического эха на первом принятом аудиоканале (например, посредством вычитания первой оценки первого сигнала акустического эха из первого принятого аудиоканала) для получения первого модифицированного аудиоканала.
Второй блок 124 подавления взаимных помех, например, может быть выполнен с возможностью проводить подавление акустического эха на втором принятом аудиоканале (например, посредством вычитания второй оценки второго сигнала акустического эха из второго принятого аудиоканала) для получения второго модифицированного аудиоканала.
Фиг. 1b иллюстрирует устройство для подавления многоканальных взаимных помех в соответствии с другим вариантом осуществления.
По сравнению с устройством на фиг. 1a устройство на фиг. 1b дополнительно содержит третий блок 132 фильтра и третий блок 134 подавления взаимных помех.
В варианте осуществления на фиг. 1b принятый аудиосигнал содержит три или более принятых аудиоканалов, и модифицированный аудиосигнал содержит три или более модифицированных аудиоканалов.
Третий блок 132 фильтра выполнен с возможностью формировать третью оценку
Третий блок 134 подавления взаимных помех выполнен с возможностью формировать третий модифицированный аудиоканал

Фиг. 1c иллюстрирует устройство для подавления многоканальных взаимных помех в соответствии с дополнительным вариантом осуществления.
По сравнению с устройством на фиг. 1a устройство на фиг. 1c дополнительно содержит третий блок 132 фильтра и третий блок 134 подавления взаимных помех.
В варианте осуществления на фиг. 1c принятый аудиосигнал содержит три или более принятых аудиоканалов, и модифицированный аудиосигнал содержит три или более модифицированных аудиоканалов.
Третий блок 132 фильтра выполнен с возможностью формировать третью оценку
Третий блок 134 подавления взаимных помех выполнен с возможностью формировать третий модифицированный аудиоканал
В других вариантах осуществления (которые реализуют факультативную штриховую линию 199 на фиг. 1c) третий блок 132 фильтра выполнен с возможностью формировать третью оценку
Фиг. 2 иллюстрирует методику AEC с несколькими микрофонами в соответствии с предшествующим уровнем техники. В этом подходе предшествующего уровня техники первый блок 282 фильтра используется для формирования первой оценки
Первый блок 284 подавления взаимных помех затем формирует первый модифицированный аудиоканал
В подходе предшествующего уровня техники на фиг. 2 второй блок 292 фильтра формирует вторую оценку

Второй блок 294 подавления взаимных помех затем формирует второй модифицированный аудиоканал


Некоторые варианты осуществления сокращают сложность подавления акустического эха (AEC) с несколькими микрофонами, которое изображено на фиг. 2, посредством использования подхода на основе относительной передаточной функции (RTF), как изображено на фиг. 3. Относительные передаточные функции описаны в [4], [7].
Фиг. 3 иллюстрирует подавление акустического эха (AEC) с несколькими микрофонами в соответствии с вариантами осуществления. На фиг. 3 первый блок 312 фильтра используется для формирования первой оценки
Первый блок 314 подавления взаимных помех затем формирует первый модифицированный аудиоканал
Устройство на фиг. 3 теперь отличается от фиг. 2 тем, что второй блок 322 фильтра формирует вторую оценку
Второй блок 324 подавления взаимных помех затем формирует второй модифицированный аудиоканал
Некоторые варианты осуществления сокращают сложность подавления акустического эха (AEC) с несколькими микрофонами, которое изображено на фиг. 2, посредством использования подхода на основе относительной передаточной функции (RTF), как изображено на фиг. 3. Относительные передаточные функции описаны в [4], [7].
Варианты осуществления используют оценку первичного сигнала взаимных помех для вычисления оценок оставшихся, или вторичных, сигналов взаимных помех. Чтобы оценить первичный сигнал взаимных помех, идентифицируется первичный фильтр, который описывает отношение между опорным сигналом и первичным принятым сигналом. Оценка первичного сигнала взаимных помех затем получается посредством фильтрации опорного сигнала с помощью оценки первичного фильтра. Затем идентифицируются вторичные фильтры, например, фильтры, которые описывают отношения между оценочным первичным сигналом взаимных помех и вторичными принятыми сигналами. Затем оценки вторичных сигналов взаимных помех вычисляются посредством фильтрации оценки первичного сигнала взаимных помех с помощью оценочных вторичных фильтров. Наконец, применяется подавление, чтобы сократить электроакустическую связь. Если расстояние между микрофонами мало, вторичные фильтры короче, чем первичные фильтры (см., например, [10], [19]), что приводит к сокращению вычислительной сложности.
Некоторые варианты осуществления используются для подавления акустического эха. С этой целью фиг. 3 изображает сценарий связи, применяемый со свободными руками, с одним громкоговорителем (одним передатчиком) и







Далее представлен поэтапный подход в соответствии с некоторыми вариантами осуществления.
1) Первичный сигнал взаимных помех оценивается с использованием опорного сигнала. В конкретном приложении подавления акустического эха первым из них является сигнал акустического эха, и вторым - сигнал громкоговорителей. Для этого:
1.1) первичный фильтр, который описывает отношение между опорным сигналом и первичным сигналом приемника, являющимся
(a) либо единственным сигналом приемника,
(b) либо линейной комбинацией сигналов приемника,
идентифицируется с использованием, например, методики адаптивной фильтрации;
1.2.) опорный сигнал фильтруется с помощью оценки первичного фильтра для вычисления оценки первичного сигнала взаимных помех;
1.3.) подавление взаимных помех применяется посредством вычитания оценки первичного сигнала взаимных помех из первичного принятого сигнала, являющимся
(a) либо единственным сигналом приемника,
(b) либо линейной комбинацией сигналов приемника.
2) Вторичный сигнал взаимных помех оценивается на основе оценки первичного сигнала взаимных помех. Для этого:
2.1) вторичный фильтр, который описывает отношение между оценкой первичного сигнала взаимных помех и вторичным принятым сигналом, идентифицируется, например, посредством
i) оптимизации функции стоимости или критерия ошибки (например, среднеквадратической ошибки, (нагруженной) ошибки наименьших квадратов и т.д.);
ii) методики адаптивной фильтрации во временной области, в частотной области или в области подполос;
с использованием вторичного сигнала приемника или вторичного сигнала после подавления и оценки первичного сигнала взаимных помех (вторичный фильтр, например, может рассматриваться как конфигурация фильтра);
2.2) оценка первичного сигнала взаимных помех фильтруется с помощью оценки вторичного фильтра для вычисления оценки вторичного сигнала взаимных помех;
2.3) подавление взаимных помех применяется посредством вычитания оценки вторичного сигнала взаимных помех из вторичного сигнала приемника.
3) Повторить пункт 2 для каждого вторичного сигнала взаимных помех.
4) Повторитесь пункты 1, 2 и 3. для каждого опорного сигнала.
5) Причем передатчиком является громкоговоритель, и приемником является микрофон.
6) Причем оценка вторичного сигнала взаимных помех может использоваться в качестве оценки первичного сигнала взаимных помех, что приводит к каскадной конфигурации.
7) Причем для более чем двух приемников могут быть определены подмножества приемников, каждое из которых имеет первичный приемник.
Дополнительные варианты осуществления применяют только некоторые из упомянутых выше этапов и/или применяют этапы в другом порядке.
Далее описываются варианты осуществления, которые используют адаптивные фильтры в области оконного преобразования Фурье (short-time Fourier transform; STFT).
В оборудовании связи, применяемом со свободными руками, с одним громкоговорителем и


где






где









Следует отметить, что функции AETF в области STFT, которые экстенсивно проанализированы в [20], являются необусловленными. Кроме того, количество разделов или входных кадров, которые необходимы для оценки




Предположим, что частотная селективность окон анализа и синтеза преобразования STFT является достаточной, в результате чего частотными зависимостями можно пренебречь. Кроме того, для краткости записи в соответствии с вариантами осуществления предполагается, что задержка на

Сигналы на фиг. 4 являются сигналами в области преобразования. В частности, сигналы на фиг. 4 являются сигналами в области оконного преобразования Фурье (в области STFT). На фиг. 4 первый блок 312 фильтра используется для формирования первой оценки


Первый блок 484 подавления взаимных помех затем формирует первый модифицированный аудиоканал


В подходе на фиг. 4 второй блок 492 фильтра формирует вторую оценку

Второй блок 494 подавления взаимных помех затем формирует второй модифицированный аудиоканал


Фиг. 4 иллюстрирует методику AEC с несколькими микрофонами в области STFT. На практике вместо этого обычно задерживается путь захвата, см., например, [7], [20]. Теперь с использованием приближения сверточной передаточной функции (convolutive transfer function; CTF) (см., например, [7]) возможно написать

где



где





где

Далее описывается использование относительных передаточных функций эха в соответствии с вариантами осуществления.
Вследствие ограничений вычислительной сложности реализация методики AEC с несколькими микрофонами, изображенная на фиг. 4, не всегда выполнима.
В соответствии с вариантами осуществления предложено сократить сложность посредством использования подхода на основе относительной передаточной функции эха (relative echo transfer function; RETF), изображенного на фиг. 5. Фиг. 5 иллюстрирует методику AEC с несколькими микрофонами в области STFT в соответствии с вариантом осуществления.
Снова сигналы на фиг. 5 являются сигналами в области преобразования. В частности, сигналы на фиг. 5 являются сигналами в области оконного преобразования Фурье (в области STFT).
На фиг. 5 первый блок 312 фильтра используется для формирования первой оценки
Первый блок 514 подавления взаимных помех затем формирует первый модифицированный аудиоканал
Устройство на фиг. 5 теперь отличается от фиг. 4 тем, что второй блок 522 фильтра формирует вторую оценку
Второй блок 524 подавления взаимных помех затем формирует второй модифицированный аудиоканал
В вариантах осуществления второй блок 122 фильтра, например, может быть выполнен с возможностью определять конфигурацию фильтра в зависимости от первой оценки первого сигнала взаимных помех и в зависимости от второго принятого аудиоканала, и второй блок 122 фильтра, например, может быть выполнен с возможностью определять вторую оценку второго сигнала взаимных помех в зависимости от первой оценки первого сигнала взаимных помех и в зависимости от конфигурации фильтра.
Например, второй блок 122 фильтра выполнен с возможностью определять конфигурацию фильтра посредством минимизации функцию стоимости или минимизации критерия ошибки, например, минимизации среднеквадратической ошибки.
Далее такими конфигурациями фильтров, которые должны быть определены, например, могут являться



Конкретный пример для такого варианта осуществления приведен далее.
Без потери общности первичный сигнал эха обозначен как


где



Наконец, использование приближения функции CTF приводит к

где

Поскольку


где




где




где






когда блок подавления первичного акустического эха сошелся, равна

По сравнению с задачей оценки функций RTF на основе наблюдений шума (см., например, [4], [7], [22]) в нашей формулировке нет дополнительного смещения вследствие шумовых компонентов, которые коррелированы по каналам.
Кроме того, поскольку сигнал громкоговорителей известен, реализация детекторов голосовой активности (voice activity detector; VAD) для управления процессом оценки значительно упрощена. Напротив, детектор одновременного разговора необходим вследствие того, что на практике


Далее представлены варианты осуществления, которые используют адаптивную оценку функции RETF.
В таких вариантах осуществления второй блок 522 фильтра на фиг. 5, например, может быть выполнен с возможностью определять конфигурацию фильтра для второго индекса времени с использованием матрицы с размером шага. Например, второй блок 522 фильтра на фиг. 5 может быть выполнен с возможностью определять конфигурацию фильтра в зависимости от конфигурации фильтра для первого индекса времени, который предшествует второму индексу времени, в зависимости от первой оценки первого сигнала взаимных помех для первого индекса времени и в зависимости от отсчета второго модифицированного аудиоканала для первого индекса времени.
В конкретных вариантах осуществления второй блок 522 фильтра, например, может быть выполнен с возможностью определять конфигурацию фильтра для второго индекса времени в соответствии с

где





В более подробном описании адаптивные фильтры могут использоваться, чтобы отслеживать медленно изменяющиеся во времени функции RETF. Вследствие того, что

гарантирует быструю и стабильную конвергенцию к оптимальному фильтру. В уравнении (11)


где средние значения по времени обозначены


Далее описана оценка рабочих характеристик.
Чтобы оценить предложенный подход, проводились три набора экспериментов, для которых модельное оборудование было разработано следующим образом. Сигналы эха генерировались посредством свертки чистого речевого сигнала со смоделированными характеристиками AIR. Последние были сгенерированы с использованием способа образа (см., например, [23]) для помещения размером








Сигналы были преобразованы в области STFT с использованием анализа Хэмминга и окна синтеза длиной K=512 с 75%-м наложением, таким образом


где סּ обозначает поэлементное умножение, и


Коэффициентами с размером шага были



1. Характеристики AIR, сформированные для моделирования
2. Моделируемая среда с
3. Моделируемая среда с
Следует напомнить, что количество разделов функции AETF, которые необходимы, чтобы полностью оценить L коэффициентов характеристики AIR, составляет

Во всех моделированиях были оценены


где




Фиг. 6 изображает результаты, соответствующие моделированиям с усеченными характеристиками AIR. В частности, фиг. 6 изображает сравнение между методиками AEC на основе функции AETF и функции RETF с усеченными характеристиками AIR и L=256 отводов. Сокращение эха, полученное с

Кроме того, эти рабочие характеристики лишь умеренно хуже, чем рабочие характеристики подхода на основе функции AETF с

Сравнение производительности для
Тем не менее, подход на основе функции RETF по-прежнему вдет себя лучше и почти так же, как подход на основе функции AETF с

Наконец, результаты, показанные на фиг. 8, соответствуют модельному оборудованию с
Можно заметить, что предложенный способ выигрывает в обоих тестовых сценариях в подходе на основе функции AETF с одинаковым количеством обусловленных разделов. Кроме того, для
Таким образом, было показано, что предложенный подход может выигрывать у подхода AEC на основе функции AETF существующего уровня техники с равным количеством обусловленных разделов. Кроме того, было продемонстрировано, что посредством использования подхода AEC на основе функции RETF количество оценочных разделов может быть сокращено за счет умеренного снижения рабочих характеристик.
Далее описано использование адаптивных фильтров в частотной области в соответствии с вариантами осуществления.
В частности, описание обеспечено с использованием адаптивных фильтров в частотной области с разделением на блоки (partitioned-block frequency-domain adaptive filter: PB-FDAF) (см., например, [24]). В частности, эффективное внедрение адаптивных фильтров в частотной области (frequency-domain adaptive filter; FDAF) (см., например, [24], [26]), которые являются частотным аналогом для блочных адаптивных фильтров во временной области (см., например, [27], [28]), сильно отличается от использования фильтров в области STFT. Для получения дополнительной информации об этом см., например, [20] и ссылки.
В соответствии с некоторыми вариантами осуществления два или более принятых аудиоканалов и два или более модифицированных аудиоканалов, например, могут являться каналами в частотной области с разделением на блоки, причем каждый из двух или более принятых аудиоканалов и двух или более модифицированных аудиоканалов содержит множество разделов. Опорный сигнал и первый и второй сигналы взаимных помех, например, могут являться сигналами в частотной области с разделением на блоки, причем каждый из опорного сигнала и первого и второго сигналов взаимных помех содержит множество разделов.
В некоторых вариантах осуществления второй блок 122; 322; 522 фильтра, например, может быть выполнен с возможностью определять конфигурацию фильтра в зависимости от первой оценки первого сигнала взаимных помех и в зависимости от второго принятого аудиоканала. Кроме того, второй блок 122; 322; 522 фильтра, например, может быть выполнен с возможностью определять вторую оценку второго сигнала взаимных помех в зависимости от первой оценки первого сигнала взаимных помех и в зависимости от конфигурации фильтра. Кроме того, второй блок 122; 322; 522 фильтра, например, может быть выполнен с возможностью определять конфигурацию фильтра для второго индекса времени в зависимости от конфигурации фильтра для первого индекса времени, который предшествует второму индексу времени, в зависимости от первой оценки первого сигнала взаимных помех для первого индекса времени и в зависимости от отсчета второго модифицированного аудиоканала для первого индекса времени.
Далее изложено описание вариантов осуществления, использующих фильтры PB-FDAF, с использованием методики наложения с сохранением (см., например, [25], [29]). Представление в виде формулы частотной области с разделением на блоки для сигнала микрофона:

где сигнал эха в частотной области получен после линеаризации результата круговой свертки длины

где



где



Следует отметить, что общее количество линейных компонентов, получающихся в результате круговой свертки в уравнении (14), равно



где отсчеты сигнала во временной области обозначены

которые являются, соответственно, составной матрицей входных матриц в частотной области и составным вектором разделов характеристики AIR в частотной области. После этого возможно кратко представить уравнение (14) как


Применение последнего эквивалентно применению обратного DFT, отклонению круговых компонентов во временной области посредством умножения результата круговой свертки на окно ограничения круговой свертки


и обобщенное уравнение обновления фильтра PB-FDAF:

где


обозначает матрицу ограничения круговой корреляции, где



Аналогичным образом для представления с использованием функций RETF можно определить сигналы вторичного эха как

где без потери общности





Следует помнить, что в отличие от представления в области STFT функции AETF и RETF в частотной области являются обусловленными, например,




На практике это может быть преодолено с помощью задержки вторичных сигналов микрофона, как изображено на фиг. 3, во временной или частотной области. Для синхронизации первичный сигнал ошибки после подавления также должен быть задержан. Для краткости написания в соответствии с вариантами осуществления теперь предполагается, что

Как в уравнении (8), в соответствии с вариантами осуществления


Сигнал ошибки после подавления тогда равен

и минимизация функции стоимости


Следовательно, способ Ньютона принимает следующую форму

если формулируется адаптивный алгоритм в частотной области с разделением на блоки, где

В более общем варианте осуществления второй блок 122; 322; 522 фильтра выполнен с возможностью определять конфигурацию фильтра в частотной области с разделением на блоки в соответствии с

где





Далее рассматриваются реализация и аспекты синхронизации вариантов осуществления.
В частности, обеспечено подробное описание необусловленных (

Вследствие возможной не обусловленности фильтров RETF необходимо выполнить задержку вторичных сигналов микрофона, как изображено на фиг. 3, чтобы гарантировать, что необусловленные коэффициенты также моделируются оценочными функциями RETF в частотной области (с разделением на блоки). Для этого существует две стратегии:
- Буферизация входных сигналов вторичных микрофонов на основе отсчетов, например, во временной области. Это позволяет пользователю поддерживать наименьшую возможную задержку. Однако для синхронизации первичный сигнал после подавления должен быть соответствующим образом задержан, и это подразумевает необходимость преобразовать

- Буферизация входных сигналов вторичных микрофонов в частотной области. Следовательно, они должны быть задержаны на основе кадров, что приводит к большей задержке по сравнению с задержкой, внесенной во временной области. Преимущество этого варианта состоит в том, что нет необходимости преобразовывать первичный сигнал во временную область после подавления. Следовательно, блок подавления многоканальных взаимных помех может быть присоединен непосредственно к постпроцессору в частотной области.
Далее подробно описываются две возможные реализации.
Сначала рассматриваются варианты осуществления с задержанными вторичными сигналами микрофона.
Из уравнения (17) очевидно, что задержка из


Теперь рассматриваются варианты осуществления с ограничением симметричного градиента.
Улучшение описанного выше способ учитывает модификацию ограничения градиента



Чтобы гарантировать выходные данные без смешанных эффектов после фильтрации, также должно быть соответствующим образом модифицировано ограничение свертки в уравнении (14):

Следует отметить, что приведенное выше ограничение отбрасывает
Эти симметричные ограничения представляют собой лишь первоначальные ограничения





является эквивалентом в частотной области для циклического сдвига. Для практической реализации приведенная выше матрица не представляет интереса, поскольку ограничения обычно накладываются во временной области.
Тем не менее, аналогичная матрица


Посредством использования приведенной выше формулы в соответствии с вариантами осуществления достигается гибкость, поскольку выбор линейных коэффициентов задается определением
Теперь подводятся итоги для подходов реализации, использующих фильтр PB-FDAF.
Выбор реализации для использования зависит от сценария применения. Очевидно, что без предположений об относительных позициях микрофона-источника необходимо внесение некоторой задержки для достижения высококачественных выходных данных фильтра. Следующая таблица обобщенно представляет методы реализации.
Далее описывается анализ сложности для конкретного случая, в котором имеется 1 первичный канал и

Сначала рассматривается временная область.
Далее обеспечивается иллюстративный анализ сложности с точки зрения сложений и умножений. С этой целью обозначим длину оценочного первичного фильтра как

где



Предложенный способ может сократить алгоритмическую сложность посредством сокращения длины адаптивных фильтров. Тогда сокращение алгоритмической сложности задано отношением

В целом, если один и тот же адаптивный алгоритм используется для оценки и первичного, и вторичных фильтров, то отношение задано как

Наиболее простой пример: если алгоритм наименьших средних квадратов (LMS) (см., например, [2]) используется для первичного и вторичных блоков подавления эха,


Если разные адаптивные фильтры используются для оценки первичного и вторичных фильтров, следует тщательно рассматривать вычислительную сложность индивидуальных алгоритмов.
Теперь рассмотрим область STFT
Далее анализируется сложность с точки зрения сложений и умножений. С этой целью сначала изучим сложность на каждый раздел адаптивного фильтра в области STFT:

где




Предложенный способ может сократить алгоритмическую сложность, если

Следовательно, если один и тот же адаптивный фильтр используется для первичного и вторичных блоков подавления эха, отношение задано как

Если разные адаптивные фильтры используются для оценки функций AETF и RETF, следует тщательно рассматривать вычислительную сложность индивидуальных алгоритмов.
Конкретные применения вариантов осуществления, например, могут реализовать решения с малой сложностью методики MC-AEC для следующих применений:
- Смартфоны, планшеты и персональные компьютеры.
- Активируемые голосом помощники, интеллектуальные динамики и интеллектуальные бытовые устройства.
- Интеллектуальные телевизоры.
Хотя некоторые аспекты были описаны в контексте устройства, ясно, что эти аспекты также представляют описание соответствующего способа, где модуль или устройство соответствуют этапу способа или признаку этапа способа. Аналогичным образом аспекты, описанные в контексте этапа способа, также представляют описание соответствующего модуля, или элемента, или признака соответствующего устройства. Некоторые или все этапы способа могут быть исполнены посредством (или с использованием) аппаратного устройства, такого как, например, микропроцессора, программируемого компьютера или электронной схемы. В некоторых вариантах осуществления один или более из самых важных этапов способа могут быть исполнены таким устройством.
В зависимости от некоторых требований реализации варианты осуществления изобретения могут быть реализованы в аппаратных средствах или в программном обеспечении, или по меньшей мере частично в аппаратных средствах, или по меньшей мере частично в программном обеспечении. Реализация может быть выполнена с использованием цифрового запоминающего носителя, например гибкого диска, DVD, Blu-ray, CD, ПЗУ (ROM), ППЗУ (PROM), СППЗУ (EPROM), ЭСППЗУ (EEPROM) или флэш-памяти, имеющих сохраненные на них читаемые в электронном виде управляющие сигналы, которые взаимодействуют (или способны взаимодействовать) с программируемой компьютерной системой, в результате чего выполняется соответствующий способ. Таким образом, цифровой запоминающий носитель может являться машиночитаемым.
Некоторые варианты осуществления в соответствии с изобретением содержат носитель данных, имеющий читаемые в электронном виде управляющие сигналы, которые способны взаимодействовать с программируемой компьютерной системой, в результате чего выполняется один из способов, описанных в настоящем документе.
Обычно варианты осуществления настоящего изобретения могут быть реализованы как компьютерный программный продукт с программным кодом, программный код выполнен с возможностью выполнения одного из способов, когда компьютерный программный продукт исполняется на компьютере. Программный код, например, может быть сохранен на машиночитаемом носителе.
Другие варианты осуществления содержат компьютерную программу для выполнения одного из способов, описанных в настоящем документе, сохраненных на машиночитаемом носителе.
Другими словами, вариант осуществления способа изобретения, таким образом, представляет собой компьютерную программу, имеющую программный код для выполнения одного из способов, описанных в настоящем документе, когда компьютерная программа исполняется на компьютере.
Дополнительный вариант осуществления способов изобретения, таким образом, представляет собой носитель данных (или цифровой запоминающий носитель, или машиночитаемый носитель), содержащий записанную на нем компьютерную программу для выполнения одного из способов, описанных в настоящем документе. Носитель данных, цифровой запоминающий носитель или носитель с записанными данными обычно является материальными и/или долгого хранения.
Дополнительный вариант осуществления способа изобретения, таким образом, поток данных или последовательность сигналов, представляющих компьютерную программу для выполнения одного из способов, описанных в настоящем документе. Поток данных или последовательность сигналов могут, например, быть выполнен с возможностью быть перенесенными сквозное отверстие соединение обмена данными, например, сквозное отверстие Интернет.
Дополнительный вариант осуществления содержит средство обработки, например компьютер или программируемое логическое устройство, выполненное с возможностью или адаптированное для выполнения одного из способов, описанных в настоящем документе.
Дополнительный вариант осуществления содержит компьютер, имеющий установленную на нем компьютерную программу для выполнения одного из способов, описанных в настоящем документе.
Дополнительный вариант осуществления в соответствии с изобретением содержит устройство или систему, выполненную с возможностью переносить (например, в электронном или оптическом виде) компьютерную программу для выполнения одного из способов, описанных в настоящем документе, к приемнику. Приемник, например, может являться компьютером, мобильным устройством, запоминающим устройством и т.п. Устройство или система, например, могут содержать файловый сервер для переноса компьютерной программы к приемнику.
В некоторых вариантах осуществления программируемое логическое устройство (например, программируемая пользователем вентильная матрица) может использоваться для выполнения некоторой или всей функциональности способов, описанных в настоящем документе. В некоторых вариантах осуществления программируемая пользователем вентильная матрица может взаимодействовать с микропроцессором для выполнения одного из способов, описанных в настоящем документе. Обычно способы предпочтительно выполняются любым аппаратным устройством.
Устройство, описанное в настоящем документе, может быть реализовано с использованием аппаратного устройства, или с использованием компьютера, или с использованием комбинации аппаратного устройства и компьютера.
Способы, описанные в настоящем документе, могут быть выполнены с использованием аппаратного устройства, или с использованием компьютера, или с использованием комбинации аппаратного устройства и компьютера.
Описанные выше варианты осуществления являются лишь иллюстрацией принципов настоящего изобретения. Подразумевается, что модификации и вариации размещений и подробностей, описанных в настоящем документе, будут очевидны для других специалистов в области техники. Таким образом, подразумевается, что изобретение ограничено только объемом последующей патентной формулы изобретения, а не конкретными подробностями, представленными посредством описания и разъяснения представленных в настоящем документе вариантов осуществления.
СПИСОК ЛИТЕРАТУРЫ
[1] E. Hänsler and G. Schmidt, ʺAcoustic Echo and Noise Control: A practical Approachʺ New Jersey, USA: Wiley, 2004.
[2] S. Haykin, ʺAdaptive Filter Theoryʺ, 4th ed. New Jersey, USA: Prentice-Hall, 2001.
[3] W. Kellermann, ʺStrategies for combining acoustic echo cancellation and adaptive beamforming microphone arrays", in Proc. IEEE ICASSP, Munich, Germany, Apr. 1997, pp. 219-222.
[4] O. Shalvi and E. Weinstein, ʺSystem identification using nonstationary signals", IEEE Trans. Signal Process., vol. 44, no. 8, pp. 2055-2063, 1996.
[5] S. Gannot, D. Burshtein, and E. Weinstein, ʺSignal enhancement using beamforming and nonstationarity with applications to speech," IEEE Trans. Signal Process., vol. 49, no. 8, pp. 1614-1626, Aug. 2001.
[6] I. Cohen, ʺRelative transfer function identification using speech signals," IEEE Trans. Speech Audio Process., vol. 12, no. 5, pp. 451-459, Sep. 2004.
[7] R. Talmon, I. Cohen, and S. Gannot, ʺRelative transfer function identification using convolutive transfer function approximation," IEEE Trans. Audio, Speech, Lang. Process., vol. 17, no. 4, pp. 546-555, May 2009.
[8] G. Reuven, S. Gannot, and I. Cohen, ʺJoint noise reduction and acoustic echo cancellation using the transfer-function generalized sidelobe canceller," Speech Communication, vol. 49, no. 7-8, pp. 623-635, Aug. 2007.
[9] R. Talmon, I. Cohen, and S. Gannot, ʺConvolutive transfer function generalized sidelobe canceler," IEEE Trans. Audio, Speech, Lang. Process., vol. 17, no. 7, pp. 1420-1434, Sep. 2009.
[10] T. Dvorkind and S. Gannot, ʺSpeaker localization in a reverberant environment," in Proc. the 22nd convention of Electrical and Electronics Engineers in Israel (IEEEI), Tel-Aviv, Israel, Dec. 2002, pp. 7-7.
[11] T. G. Dvorkind and S. Gannot, ʺTime difference of arrival estimation of speech source in a noisy and reverberant environment," Signal Processing, vol. 85, no. 1, pp. 177-204, Jan. 2005.
[12] X. Li, L. Girin, R. Horaud, and S. Gannot, ʺEstimation of the direct-path relative transfer function for supervised sound-source localization," IEEE Trans. Audio, Speech, Lang. Process., vol. 4, no. 11, pp. 2171-2186, Nov. 2016.
[13] C. Yemdji, M. Mossi Idrissa, N. Evans, C. Beaugeant, and P. Vary, ʺDual channel echo postfiltering for hands-free mobile terminals," in Proc. IWAENC, Aachen, Germany, Sep. 2012, pp. 1-4.
[14] C. Yemdji, L. Lepauloux, N. Evans, and C. Beaugeant, ʺMethod for processing an audio signal and audio receiving circuit," U.S. Patent 2014/0 334 620, 2014.
[15] W. Kellermann, ʺJoint design of acoustic echo cancellation and adaptive beamforming for microphone arrays," in Proc. Intl. Workshop Acoust. Echo Noise Control (IWAENC), London, UK, 1997, pp. 81-84.
[16] W. Herbordt and W. Kellermann, ʺGSAEC - acoustic echo cancellation embedded into the generalized sidelobe canceller," in Proc. European Signal Processing Conf. (EUSIPCO), vol. 3, Tampere, Finland, Sep. 2000, pp. 1843-1846.
[17] W. Herbordt, W. Kellermann, and S. Nakamura, ʺJoint optimization of LCMV beamforming and acoustic echo cancellation," in Proc. European Signal Processing Conf. (EUSIPCO), Vienna, Austria, Sep. 2004, pp. 2003-2006.
[18] K.-D. Kammeyer, M. Kallinger, and A. Mertins, ʺNew aspects of combining echo cancellers with beamformers," in Proc. IEEE ICASSP, vol. 3, Philadelphia, USA, Mar. 2005, pp. 137-140.
[19] Y. Avargel and I. Cohen, ʺAdaptive system identification in the short-time fourier transform domain using cross-multiplicative transfer function approximation," IEEE Trans. Audio, Speech, Lang. Process., vol. 6, no. 1, pp. 162-173, Jan. 2008.
[20] ʺSystem identification in the short-time Fourier transform domain with crossband filtering," IEEE Trans. Audio, Speech, Lang. Process., vol. 15, no. 4, pp. 1305-1319, May 2007.
[21] ʺOn multiplicative transfer function approximation in the short-time fourier transform domain," IEEE Signal Process. Lett., vol. 14, no. 5, pp. 337-340, May 2007.
[22] I. Cohen, ʺSpeech enhancement using a noncausal a priori SNR estimator," IEEE Signal Process. Lett., vol. 11, no. 9, pp. 725-728, Sep. 2004.
[23] J. B. Allen and D. A. Berkley, ʺImage method for efficiently simulating small-room acoustics," J. Acoust. Soc. Am., vol. 65, no. 4, pp. 943-950, Apr. 1979.
[24] P. C. W. Sommen, ʺPartitioned frequency-domain adaptive filters," in Proc. Asilomar Conf. on Signals, Systems and Computers, 1989, pp. 677-681.
[25] J. J. Shynk, ʺFrequency-domain and multirate adaptive filtering," IEEE Signal Process. Mag., vol. 9, no. 1, pp. 14-37, Jan. 1992.
[26] S. Haykin, ʺAdaptive Filter Theoryʺ, 4th ed. Prentice-Hall, 2002.
[27] M. Dentino, J. McCool, and B. Widrow, ʺAdaptive filtering in the frequency domain," Proc. of the IEEE, vol. 66, no. 12, pp. 1658-1659, Dec. 1978.
[28] G. A. Clark, S. R. Parker, and S. K. Mitra, ʺA unified approach to time- and frequency-domain realization of FIR adaptive digital filters", IEEE Trans. Acoust., Speech, Signal Process., vol. 31, no. 5, pp. 1073-1083, Oct. 1983.
[29] A. Oppenheim and R. W. Schafer, ʺDigital Signal Processingʺ, 2nd ed. Prentice-Hall Inc., Englewood Cliff, NJ, 1993.
[30] R. M. M. Derkx, G. P. M. Engelmeers, and P. C. W. Sommen, ʺNew constraining method for partitioned block frequency-domain adaptive filters", IEEE Trans. Signal Process., vol. 50, no. 3, pp. 2177-2186, 2002.
Реферат
Изобретение относится к акустике, в частности к устройствам для подавления многоканальных взаимных помех. Устройство содержит первый адаптивный фильтр, выполненный с возможностью формировать первую оценку первого сигнала взаимных помех в зависимости от опорного сигнала. Устройство содержит первое средство подавления взаимных помех, выполненное с возможностью формировать первый модифицированный аудиоканал из двух или более модифицированных аудиоканалов на основе первого принятого аудиоканала из двух или более принятых аудиоканалов в зависимости от первой оценки первого сигнала взаимных помех. Кроме того, устройство содержит второй адаптивный фильтр, выполненный с возможностью формировать вторую оценку второго сигнала взаимных помех в зависимости от первой оценки первого сигнала взаимных помех. Кроме того, устройство содержит второе средство подавления взаимных помех, выполненное с возможностью формировать второй модифицированный аудиоканал из двух или более модифицированных аудиоканалов на основе второго принятого аудиоканала из двух или более принятых аудиоканалов в зависимости от второй оценки второго сигнала взаимных помех. Технический результат – уменьшение взаимных помех. 3 н. и 12 з.п. ф-лы, 8 ил.
Формула























Комментарии