Удаленный мониторинг и осмотр лифта - RU2735111C2
Код документа: RU2735111C2
Чертежи

Описание
Настоящее изобретение касается способа и системы для удаленного мониторинга и осмотра лифтовой установки.
Обычно удаленный мониторинг лифтов осуществляют путем расположения нескольких выделенных датчиков, которые находятся в лифтовой установке и которые собирают диагностические данные, касающиеся этой установки, и которые сообщают с помощью сети связи о любом необычном или нестандартном состоянии лифта в удаленный центр обслуживания. Анализ данных, собранных от датчиков, может быть выполнен локально, например, с использованием микропроцессора и памяти в контроллере лифта, или в качестве альтернативы данные могут быть переданы напрямую по сети связи, так что анализ может быть проведен в процессоре в удаленном центре обслуживания. Такие системы и способы описаны в опубликованных патентных документах EP1670178 и EP1415947.
Использование датчиков, установленных на постоянной основе, для непрерывного сбора диагностических данных, касающихся установки, вместе с соответствующими хранением, передачей и обработкой этих данных, может показаться несоразмерным или чрезмерным, так как необычные, нестандартные или ошибочные состояния лифта, которые обнаруживают датчики, могут иметь место очень редко.
Другой обычный способ осмотра установки заключается в направлении на место техника по обслуживанию для проведения ручного осмотра, тем не менее по соображениям безопасности такой ручной осмотр обязательно требует вывода лифта из эксплуатации. Этот простой может привести к значительным неудобствам пользователей лифта.
Задача настоящего изобретения заключается в том, чтобы предложить систему и способ для удаленного мониторинга и осмотра лифтовой установки, тип которой указан в вводной части, при этом должны обеспечиваться высокая степень гибкости в выборе и конфигурировании удаленных функций мониторинга и должна обеспечиваться экономичность. В частности, задача настоящего изобретения заключается в том, чтобы обойтись без установленных на постоянной основе датчиков для непрерывного сбора диагностических данных, касающихся установки и/или в том, чтобы уменьшить время простоя установки в ходе мониторинга и осмотра.
Способ осмотра и мониторинга лифтовой установки, включающий в себя следующие этапы: предусматривают автономный летающий объект, при этом автономный летающий объект содержит по меньшей мере один датчик, направляют автономный летающий объект к лифтовой установке, по выбору предоставляют автономному летающему объекту доступ к шахте лифтовой установки, располагают автономный летающий объект в шахте лифта и направляют данные, собранные датчиком автономного летающего объекта, в удаленный центр обслуживания лифтов.
Соответственно, автономный летающий объект и соответствующий датчик могут быть использованы для мониторинга и осмотра лифтовой установки на временной основе, например, для конкретного количества часов, дней или недель. Более того, когда автономный летающий объект получил доступ к шахте лифта, лифтовая установка может возобновить обычную работу, таким образом, сохраняя простой на минимальном уровне. Более того, после завершения выполнения своих задач на одной лифтовой установке, автономный летающий объект может быть направлен удаленным центром обслуживания лифтов для мониторинга и осмотра другой установки.
Предпочтительно, чтобы удаленный центр обслуживания лифтов направлял автономному летающему объекту идентификационные данные установки. Следовательно, идентификационные данные установки обычно содержат географические координаты установки, высоту, на которой должен быть автономный летающий объект, чтобы получить доступ к установке, и траекторию, которой должен следовать автономный летающий объект, чтобы получить доступ к установке.
Дополнительно, для безопасности важно, чтобы к установке был разрешен доступ только авторизованного автономного летающего объекта. Соответственно, идентификационные данные установки, направленные из центра обслуживания в автономный летающий объект, также могут содержать информацию о доступе. Эта информация о доступе может содержать дату и временной период, на который конкретная лифтовая установка предоставит доступ автономному летающему объекту, и/или может содержать конкретный код работы, который может быть считан датчиком у установки для разрешения доступа.
Более того, удаленный центр обслуживания лифтов может направить соответствующую. команду доступа в лифтовую установку и, более конкретно, в контроллер лифта. Эта команда доступа может содержать дату и временной период, на который лифтовая установка с помощью контроллера лифта обеспечивает автономному летающему объекту доступ к шахте лифта. Эта команда доступа также может содержать команду лифту переместиться в заранее заданное место в шахте лифта и остановиться в этом месте на указанный временной период.
В качестве альтернативы, если информация о доступе, предоставленная автономному летающему объекту, содержит код, то этот код может быть отдельно передан из центра обслуживания в лифтовую установку с помощью ее контроллера и там сохранен. Когда автономный летающий объект приближается к установке, код может быть считан датчиком, например, с помощью технологии NFC, радиочастотной технологии или другой технологии беспроводной связи и передан контроллеру лифта. Если код, считанный из автономного летающего объекта, соответствует коду, переданному отдельно из центра обслуживания, то контроллер лифта может по выбору разрешить доступ автономному летающему объекту в шахту лифта.
Предпочтительно, чтобы данные, собранные датчиком, расположенным на автономном летающем объекте, могли быть направлены беспроводным образом, например, с помощью NFC, в контроллер лифта, который далее может перенаправить эти данные по телекоммуникационной сети в удаленный центр обслуживания. Данные могут быть направлены в контроллер лифта в режиме реального времени. В качестве альтернативы, данные, собранные датчиком, могут быть сохранены и далее направлены в отдельные временные интервалы в контроллер лифта.
После завершения выполнения своих задач в шахте лифта, необходимо предоставить автономному летающему объекту выход из шахты лифтовой установки. Этот этап соответствует ранее описанному этапу предоставления автономному летающему объекту возможности получить доступ в шахту лифта. Если информация о доступе, предоставленная автономному летающему объекту, содержит заранее заданный временной интервал, например, количество часов, дней или недель, в течение которого автономный летающий объект должен выполнить свою задачу, то та же информация может быть передана из центра обслуживания в лифтовую установку, так что она по выбору может разрешить автономному летающему объекту выйти или покинуть шахту лифта после заранее заданного временного интервала.
В качестве альтернативы, если информация о доступе, предоставленная автономному летающему объекту, содержит конкретный код, то этот код может быть отдельно передан из центра обслуживания в лифтовую установку с помощью ее контроллера и там сохранен. Когда автономный летающий объект приближается к месту допуска, код может быть считан датчиком, например, с помощью технологии NFC, радиочастотной технологии или другой технологии беспроводной связи, и передан контроллеру лифта. Если код, считанный из автономного летающего объекта, соответствует коду, переданному отдельно из центра обслуживания, то контроллер лифта может по выбору разрешить автономному летающему объекту выход из шахты лифта.
После выхода из шахты лифтовой установки, автономный летающий объект может или направиться на другую лифтовую установку для повторения своих задач по мониторингу и осмотру, или направиться на базовую станцию.
В изобретении также предложена система удаленного осмотра и мониторинга лифтовой установки, содержащая: удаленный центр обслуживания лифтов, автономный летающий объект, при этом автономный летающий объект содержит по меньшей мере один датчик, доступ в лифтовой установке для разрешения по выбору автономному летающему объекту попасть в шахту лифта и покинуть шахту лифта, и сеть связи для передачи в удаленный центр обслуживания лифтов данных, собранных датчиком.
Предпочтительно, чтобы система дополнительно содержала дополнительный датчик, соединенный с контроллером лифта для считывания кода из автономного летающего объекта, когда он находится вблизи этого дополнительного датчика. Соответственно, контроллер лифта может предоставить автономному летающему объекту доступ к шахте лифта, когда указанный код соответствует коду, переданному отдельно из центра обслуживания в контроллер лифта.
Контроллер лифта может открыть или разблокировать доступ, чтобы разрешить автономному летающему объекту попасть в шахту лифта или покинуть шахту лифта.
Предпочтительно, чтобы данные, собранные датчиком, были направлены в контроллер лифта и дополнительно переданы по сети связи в удаленный центр обслуживания лифтов.
Другие цели, признаки и достоинства настоящего изобретения будут ясны из последующего подробного описания предпочтительных вариантов осуществления изобретения, приведенных со ссылками на приложенные чертежи, на которых:
фиг. 1 - вид, схематично показывающий пример компоновки системы для удаленного мониторинга и осмотра нескольких лифтов;
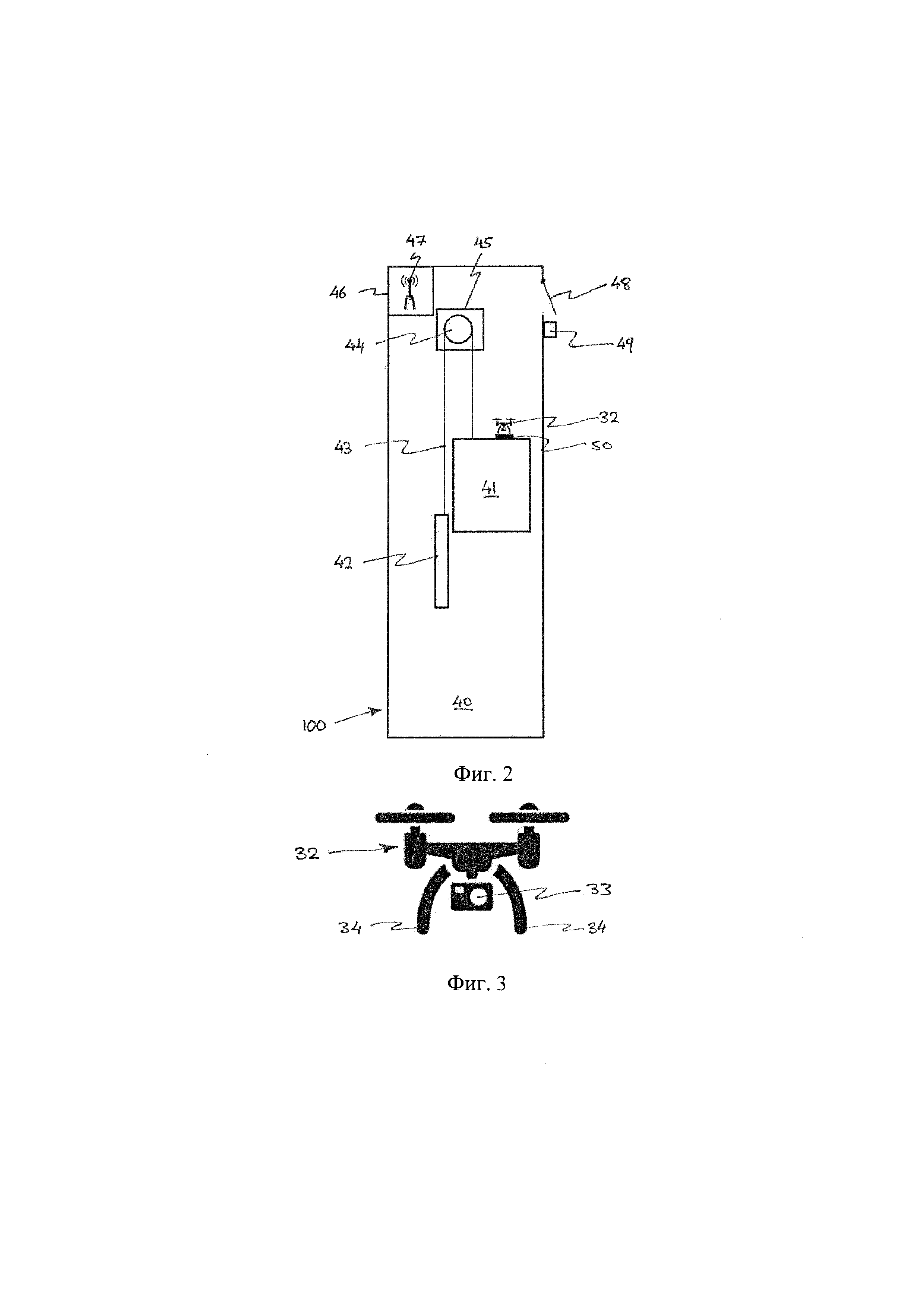
фиг. 2 - вид, показывающий один из лифтов с фиг. 1; и
фиг. 3 - вид с пространственным разделением деталей, показывающий один из автономных летающих объектов из системы с фиг. 1.
На фиг. 1 схематично показан пример компоновки системы для удаленного осмотра и мониторинга нескольких лифтовых установок 100, 200 и 300. Система содержит удаленный центр 20 обслуживания, который регулирует работу лифтовых установок и контролирует и записывает техническое состояние лифтовых установок 100, 200 и 300. Центр 20 обслуживания состоит из компьютерной системы 21 и банка 22 данных, в котором содержатся данные, касающиеся технического состояния и рабочего состояния. Компьютерная система 21 и банк 22 данных соединены с помощью шины данных. Данные, хранящиеся в банке 22 данных, и фактические рабочие данные лифтовой установки 100 могут быть вызваны с помощью шины данных с помощью дополнительного оборудования обработки данных, и указанные данные могут быть дополнительно обработаны для дополнительной оценки. Центр 20 обслуживания дополнительно содержит блок 24 связи, позволяющий обмениваться данными с контроллерами, расположенными в каждой лифтовой установке 100, 200 и 300. Блок 24 связи также может обмениваться данными с соответствующим блоком 31 связи в базовой станции 30 для одного или нескольких автономных летающих объектов 32. Предпочтительно, чтобы обмен данными между центром 20 обслуживания, базовой станцией 30 и каждой лифтовой установкой 100, 200 и 300 осуществлялся с помощью сети 16 проводной связи или сети 16 мобильной связи.
Базовая станция 30 приспособлена для нескольких автономных летающих объектов 32, таких как дроны. Когда автономные летающие объекты 32 не используются, они могут заряжаться на базовой станции 30. Базовая станция 30 также содержит несколько разных датчиков 33, которые могут быть прикреплены к автономным летающим объектам 32. Эти датчики 33 могут быть датчиками любого типа. Таким образом, могут быть использованы камера, микрофон, датчик ускорения, датчик температуры, датчик давления воздуха, датчик тока, датчик напряжения, датчик света, датчик влажности, датчик веса, датчик скорости, датчик силы, датчик магнитного поля, гироскоп, датчик положения и так далее.
Когда требуется провести удаленный мониторинг и осмотр конкретной лифтовой установки 100, центр 20 обслуживания направляет запрос в базовую станцию 30, которая, в свою очередь, командует одному из автономных летающих объектов 32 вместе с его датчиком 33 лететь к лифтовой установке 100. Следовательно, запрос обязательно содержит идентификационные данные установки, которые обычно содержат географические координаты установки 100, высоту, на которой должен быть автономный летающий объект 32, чтобы получить доступ к установке 100, и траекторию, которой должен следовать автономный летающий объект 32, чтобы получить доступ к установке 100.
Дополнительно, для безопасности важно, чтобы к установке 100 был разрешен доступ только авторизованного автономного летающего объекта 32. Соответственно, запрос, направленный из центра 20 обслуживания в автономный летающий объект 32 с помощью базовой станции 30, также будет содержать информацию о доступе. Эта информация о доступе может содержать дату и временной период, на который конкретная лифтовая установка 100 предоставит доступ автономному летающему объекту 32, и/или может содержать конкретный код работы, который может быть считан датчиком 49 у установки 100 для разрешения доступа.
На фиг. 2 показана одна из лифтовых установок 100 с фиг. 1. Лифтовая установка 100 содержит кабину 41 лифта и противовес 42, который выполнен с возможностью перемещения в шахте 40 лифта. Лифтовая установка 100 может являться, как в этом примере первого варианта осуществления изобретения, единственным лифтом или также может являться установкой с несколькими лифтами, которые связаны в группу в терминах управления в здании. Кабина 41 и противовес 42 подвешены с помощью канатоведущего средства 43, которое направляют через канатоведущий шкив 44. Канатоведущий шкив 44 приводят в движение с помощью приводящего двигателя 45, электрическую энергию на который подают с помощью контроллера 46 лифта. Контроллер 46 лифта дополнительно содержит модуль 47 связи, позволяющий контроллеру 46 лифта обмениваться данными с центром 20 обслуживания по телекоммуникационной сети 16.
Если информация о доступе, предоставленная автономному летающему объекту 32, содержит конкретную дату и временной период, эта же информация может быть передана из центра 20 обслуживания в контроллер 46 соответствующей лифтовой установки 100, так что он может открыть или разблокировать вентиляционную заслонку 48 в шахте лифта на указанные конкретные временные рамки для разрешения доступа автономному летающему объекту 32 через вентиляционную заслонку 48 и в шахту 40 лифта.
В качестве альтернативы, если информация о доступе, предоставленная автономному летающему объекту 32, содержит код работы, то снова этот код может быть отдельно передан из центра 20 обслуживания в контроллер 46 лифта и там сохранен. Когда автономный летающий объект 32 приближается к вентиляционной заслонке 48, код работы может быть считан датчиком 49, например, с помощью технологии NFC, радиочастотной технологии или другой технологии беспроводной связи, и передан контроллеру 46 лифта. Если считанный код из автономного летающего объекта 32, соответствует коду, переданному отдельно из центра 20 обслуживания, то контроллер 46 лифта может открыть или разблокировать вентиляционную заслонку 48 для разрешения доступа автономному летающему объекту 32 через вентиляционную заслонку 48 и в шахту 40 лифта.
Предпочтительно, чтобы до предоставления автономному летающему объекту 32 доступа, контроллер 46 лифта перемещал кабину 41 лифта в заранее заданное место в шахте 40 лифта и останавливал его в этом месте на конкретный временной период. Это обеспечивает ситуацию, когда в шахте 40 лифта отсутствуют движущиеся компоненты при перемещении автономного летающего объекта 32 в шахту 40 лифта.
Когда автономный летающий объект 32 находится в шахте 40 лифта, он может быть расположен на большом массиве компонентов лифта или свободно летать рядом с указанным массивом. В настоящем примере, автономный летающий объект 32 расположен на зарядной станции 50 с индуктивной петлей, расположенной сверху кабины 41 лифта, так что электрическая энергия, подаваемая к кабине 41 лифта, может быть дополнительно использована для зарядки автономного летающего объекта 32. Дополнительно, как показано на фиг. 3, в основание автономного летающего объекта 32 могут быть встроены магниты 34. Магниты 34 должны обладать достаточной силой, позволяющей надежно прикреплять автономный летающий объект 32 к кабине 41, когда кабина 41 неподвижна и когда кабина 41 перемещается. Тем не менее, автономный летающий объект 32 должен быть способен развить достаточную подъемную силу для противодействия силе притяжения магнитов 34, чтобы отсоединиться от кабины 41 после выполнения задач мониторинга и осмотра.
В настоящем варианте осуществления изобретения с автономным летающим объектом 32, расположенным сверху кабины 41 лифта, он может использовать свой датчик 33 для получения фотографий направляющих колодок, так что удаленный центр 20 обслуживания может в дальнейшем определить износ, определить вибрации при перемещении кабины 41 по шахте 40 лифта, что позволит центру 20 обслуживания определить ходовые качества, определить уровни шума, чтобы позволить центру 20 обслуживания отслеживать работу дверей, или он может сделать видео, что позволит осуществить удаленный осмотр направляющего рельса в центре 20 обслуживания.
Аналогичные задачи могут быть выполнены автономным летающим объектом 32, расположенным на противовесе 42.
Более того, если автономный летающий объект 32 расположен на двигателе 45 лифта, то в качестве датчика 33 может быть использована инфракрасная камера для сбора данных, касающихся температуры двигателя 45, для проверки того, что он не перегревается, и датчик вибраций может быть использован для сбора данных о вибрациях двигателя.
Другими возможными задачами, которые может выполнять автономный летающий объект 32, находящийся внутри шахты 40 лифта, включают в себя мониторинг или измерение удлинения канатоведущего средства 43, запись уровней шума (для конкретных компонентов или для установки 100 в целом), осмотр канатоведущего средства 43, обнаружение воды в яме шахты 40 лифта, или удаленное наблюдение поведения установки 100 с помощью передачи видео в удаленный центр 20 обслуживания. Специалисту в рассматриваемой области ясно, что приведенный список не является исчерпывающим, и другие задачи могут быть выполнены автономным летающим объектом 32 с разными датчиками 33 при его нахождении в шахте 40 лифта.
Предпочтительно, чтобы данные, собранные датчиком 33, расположенным на автономном летающем объекте 32, могли быть направлены беспроводным образом, например, с помощью NFC, в контроллер 46 лифта, который далее может перенаправить эти данные по телекоммуникационной сети 16 в удаленный центр 20 обслуживания. Данные можно направлять в контроллер 46 лифта в режиме реального времени. В качестве альтернативы, данные, собранные датчиком 33, могут быть сохранены и далее направлены в отдельные временные интервалы в контроллер 46 лифта.
После завершения выполнения своих задач в шахте 40 лифта, необходимо предоставить автономному летающему объекту 32 выход из шахты 40 лифтовой установки 100. Этот этап соответствует ранее описанному этапу предоставления автономному летающему объекту 32 возможности получить доступ в шахту 40 лифта. Если информация о доступе, предоставленная автономному летающему объекту 32, содержит заранее заданный временной интервал, например, количество часов, дней или недель, в течение которого автономный летающий объект 32 должен выполнить свою задачу, то та же информация может быть передана из центра 20 обслуживания в контроллер 46 рассматриваемой лифтовой установки 100, так что он по выбору может открыть или разблокировать вентиляционную заслонку 48 в шахте лифта после указанного заранее заданного временного интервала, позволяя, таким образом, автономному летающему объекту 32 выйти или покинуть шахту 40 лифта.
В качестве альтернативы, если информация о доступе, предоставленная автономному летающему объекту 32, содержит конкретный код работы, который был отдельно передан из центра 20 обслуживания в контроллер 46 лифта и сохранен, то при приближении автономного летающего объекта 32 к вентиляционной заслонке 48, код работы может быть считан датчиком 49 с помощью, например, технологии NFC, радиочастотной технологии или другой беспроводной технологии, и передан в контроллер 46 лифта. Если считанный код из автономного летающего объекта 32, соответствует коду, переданному отдельно из центра 20 обслуживания, то контроллер 46 лифта может открыть или разблокировать вентиляционную заслонку 48 для разрешения автономному летающему объекту 32 выйти или покинуть шахту 40 лифта.
После выхода из шахты лифтовой установки 100, автономный летающий объект 32 может или направиться на другую лифтовую установку 200 для повторения своих задач по мониторингу и осмотру или направиться на свою базовую станцию 30.
После описания и объяснения принципов разработанных технологий специалисту в рассматриваемой области ясно, что описанные варианты осуществления изобретения могут быть изменены в плане компоновки и деталей без отхода от указанных принципов. С учетом многих возможных вариантов осуществления изобретения, в которых могут быть применены принципы описанных технологий, следует понимать, что показанные варианты осуществления изобретения являются только примерами технологий и не должны рассматриваться как ограничивающие объем изобретения. В отличие от сказанного, объем изобретения определен приведенной ниже формулой изобретения и ее эквивалентами.
Реферат
Изобретения касаются способа и системы для осмотра и мониторинга лифтовой установки (100). При осуществлении способа автономный летающий объект (32), содержащий по меньшей мере один датчик (33), направляют на лифтовую установку (100), причем автономному летающему объекту (32) предоставляют доступ к шахте лифтовой установки. Далее, автономный летающий объект (32) располагают в шахте лифта и данные, собранные датчиком (33) автономного летающего объекта (32), направляют в удаленный центр (20) обслуживания лифтов. Соответственно, автономный летающий объект (32) и соответствующий датчик (33) могут быть использованы для мониторинга и осмотра лифтовой установки (100) на временной основе, например для конкретного количества часов, дней или недель. Более того, когда автономный летающий объект (32) получил доступ к шахте лифта, лифтовая установка (100) может возобновить обычную работу, таким образом сохраняя простой на минимальном уровне. Более того, после завершения выполнения своих задач на одной лифтовой установке (100) автономный летающий объект (32) может быть направлен удаленным центром (20) обслуживания лифтов для мониторинга и осмотра другой установки (200; 300). Изобретения обеспечивают уменьшение времени простоя установки в ходе мониторинга и осмотра. 2 н. и 11 з.п. ф-лы, 3 ил.
Комментарии