Система мониторинга уровня заполнения бункера - RU2775334C1
Код документа: RU2775334C1
Чертежи



























Описание
Область техники, к которой относится настоящее изобретение
[0001] Настоящее раскрытие в общем относится к бункерам для сельскохозяйственных кормов, а более конкретно к системам мониторинга для таких бункеров.
Предшествующий уровень техники настоящего изобретения
[0002] Обычно, кормовая промышленность полагается на фермеров при мониторинге и получении отчетов на обслуживающем кормозаводе об уровнях кормов у них, чтобы обеспечить наличие у кормозавода достаточного количества времени для производства определенной смеси кормов для фермеров и ее доставки перед тем, как фермер останется без корма. Мониторинг бункеров для кормов - это задача, требующая постоянного внимания, поэтому низкие уровни заполнения бункера часто могут оставаться незамеченными, пока не станет слишком поздно, а бункеры для кормов не станут почти пустыми. Срочный запрос фермера, отчаянно нуждающегося в кормах, требует от кормозавода реорганизации своих тщательно спланированных графиков производства (подвергая других прилежных фермеров риску получить свои корма с опозданием) и изменения своих эффективно намеченных маршрутов доставки, чтобы помочь фермеру, который вовремя не дал заявку, тем самым разбивая любые надежды на достижение максимальной эффективности в их сложных операциях.
[0003] Таким образом, очень нужна система мониторинга уровня заполнения бункера для мониторинга уровней кормов внутри бункеров и для получения отчетов об этих уровнях кормов.
Краткое раскрытие настоящего изобретения
[0004] Ниже представлено упрощенное изложение некоторых аспектов или вариантов осуществления изобретения, чтобы обеспечить базовое понимание изобретения. Это краткое изложение не является обширным обзором изобретения. Оно не предназначено для определения ключевых или критических элементов изобретения или для определения объема изобретения. Его единственная цель - представить некоторые варианты осуществления изобретения в упрощенной форме в качестве вступления к более подробному описанию, которое представлено ниже.
[0005] В представленном описании раскрыта система мониторинга уровня заполнения бункера и связанный с ней способ измерения уровня корма внутри бункера.
[0006] Соответственно, аспектом раскрытия изобретения является система мониторинга уровня заполнения бункера, содержащая оптический датчик для определения уровня корма внутри бункера для корма, монтажную плату, связанную с возможностью передачи данных с датчиком для приема сигнала уровня от датчика и для обработки сигнала уровня для генерирования данных уровня заполнения бункера, аккумулятор для питания монтажной платы и датчика, корпус для содержания монтажной платы и радиопередатчик для передачи данных уровня заполнения бункера. Датчиком может быть датчик LIDAR или времяпролетный (ToF) датчик.
[0007] Еще одним аспектом раскрытия изобретения является способ мониторинга уровня заполнения бункера, причем способ предусматривает оптическое определение уровня корма внутри бункера для корма, прием сигнала уровня за счет оптического определения уровня корма, обработку сигнала уровня для генерирования данных уровня заполнения бункера и передачу данных уровня заполнения бункера.
[0008] Другие аспекты раскрытия согласно изобретению могут стать понятны специалистам в данной области.
Краткое описание фигур
[0009] Эти и другие признаки раскрытия станут более понятны из описания, в котором сделана ссылка на следующие приложенные фигуры.
[0010] Сопровождающие фигуры, которые включены в описание и составляют его часть, иллюстрируют несколько вариантов осуществления настоящего изобретения и, вместе с описанием, служат для объяснения принципов изобретения. Фигуры предназначены только для иллюстрации предпочтительного варианта осуществления изобретения и не должны рассматриваться как ограничение изобретения.
[0011] На фиг. 1 представлен изометрический вид системы мониторинга уровня заполнения бункера согласно варианту осуществления настоящего изобретения.
[0012] На фиг. 2 представлена система мониторинга уровня заполнения бункера, имеющая датчик LIDAR.
[0013] На фиг. 2а представлен увеличенный вид датчика LIDAR фиг. 2.
[0014] На фиг. 3 представлена система мониторинга уровня заполнения бункера, имеющая времяпролетный (ToF) датчик.
[0015] На фиг. 3а представлен увеличенный вид ToF датчика фиг. 3.
[0016] На фиг. 3b представлена карта точек поверхности, если смотреть с первой стороны, определяющая топологию верхней поверхности корма в бункере.
[0017] На фиг. 3с представлена еще одна карта точек поверхности, если смотреть со второй верхней стороны, определяющая топологию верхней поверхности корма в бункере.
[0018] На фиг. 4а представлен изометрический вид, изображающий датчик LIDAR.
[0019] На фиг. 4b представлен вид сзади, изображающий датчик LIDAR фиг. 4а.
[0020] На фиг. 4с представлен вид сбоку, изображающий датчик LIDAR фиг. 4а.
[0021] На фиг. 4d представлен вид спереди, изображающий датчик LIDAR фиг. 4а.
[0022] На фиг. 4е представлен вид сверху, изображающий датчик LIDAR фиг. 4а.
[0023] На фиг. 4f представлен вид снизу, изображающий датчик LIDAR фиг. 4а.
[0024] На фиг. 4g представлен изометрический вид в разрезе, изображающий датчик LIDAR фиг. 4а.
[0025] На фиг. 4h представлен вид сверху в разрезе, изображающий датчик LIDAR фиг. 4а.
[0026] На фиг. 5А представлен изометрический вид, изображающий времяпролетный (ToF) датчик.
[0027] На фиг. 5В представлен изометрический вид в разрезе, изображающий ToF датчик фиг. 5А.
[0028] На фиг. 5С представлен вид сбоку, изображающий ToF датчик фиг. 5А.
[0029] На фиг. 5D представлен вид спереди, изображающий ToF датчик фиг. 5А.
[0030] На фиг. 5Е представлен вид сзади, изображающий ToF датчик фиг. 5А.
[0031] На фиг. 5F представлен вид снизу, изображающий ToF датчик фиг. 5А.
[0032] На фиг. 5G представлен вид сверху, изображающий ToF датчик фиг. 5А.
[0033] На фиг. 5Н представлен вид спереди в разрезе, изображающий ToF датчик фиг. 5А.
[0034] На фиг. 5I представлен еще один изометрический вид, изображающий ToF датчик фиг. 5А.
[0035] На фиг. 6А представлен изометрический вид, изображающий монтажную плату.
[0036] На фиг. 6В представлен вид спереди монтажной платы фиг. 6А.
[0037] На фиг. 6С представлен вид сбоку монтажной платы фиг. 6А.
[0038] На фиг. 6D представлен вид сверху монтажной платы фиг. 6А.
[0039] На фиг. 6Е представлен вид снизу монтажной платы фиг. 6А.
[0040] На фиг. 7 представлен увеличенный вид в плане монтажной платы фиг. 6А.
[0041] На фиг. 8А представлен изометрический вид сверху корпуса для монтажной платы.
[0042] На фиг. 8В представлен изометрический вид снизу корпуса фиг. 8А.
[0043] На фиг. 8С представлен вид спереди корпуса фиг. 8А.
[0044] На фиг. 8D представлен вид сбоку корпуса фиг. 8А.
[0045] На фиг. 8Е представлен вид сзади корпуса фиг. 8А.
[0046] На фиг. 8F представлен вид сверху корпуса фиг. 8А.
[0047] На фиг. 8G представлен вид снизу корпуса фиг. 8А.
[0048] На фиг. 8Н представлен изометрический вид основания для корпуса фиг. 8А.
[0049] На фиг. 8I представлен вид спереди основания фиг. 8Н.
[0050] На фиг. 8J представлен вид сзади основания фиг. 8Н.
[0051] На фиг. 8K представлен вид сбоку основания фиг. 8Н.
[0052] На фиг. 8L представлен вид сверху основания фиг. 8Н.
[0053] На фиг. 8М представлен вид снизу основания фиг. 8Н.
[0054] На фиг. 8N представлен изометрический вид сверху еще одной пластины основания для использования с корпусом.
[0055] На фиг. 8O представлен изометрический вид снизу пластины основания фиг. 8N.
[0056] На фиг. 8Р представлен первый вид сбоку пластины основания фиг. 8N.
[0057] На фиг. 8Q представлен второй вид сбоку пластины основания фиг. 8N.
[0058] На фиг. 8R представлен вид спереди пластины основания фиг. 8N.
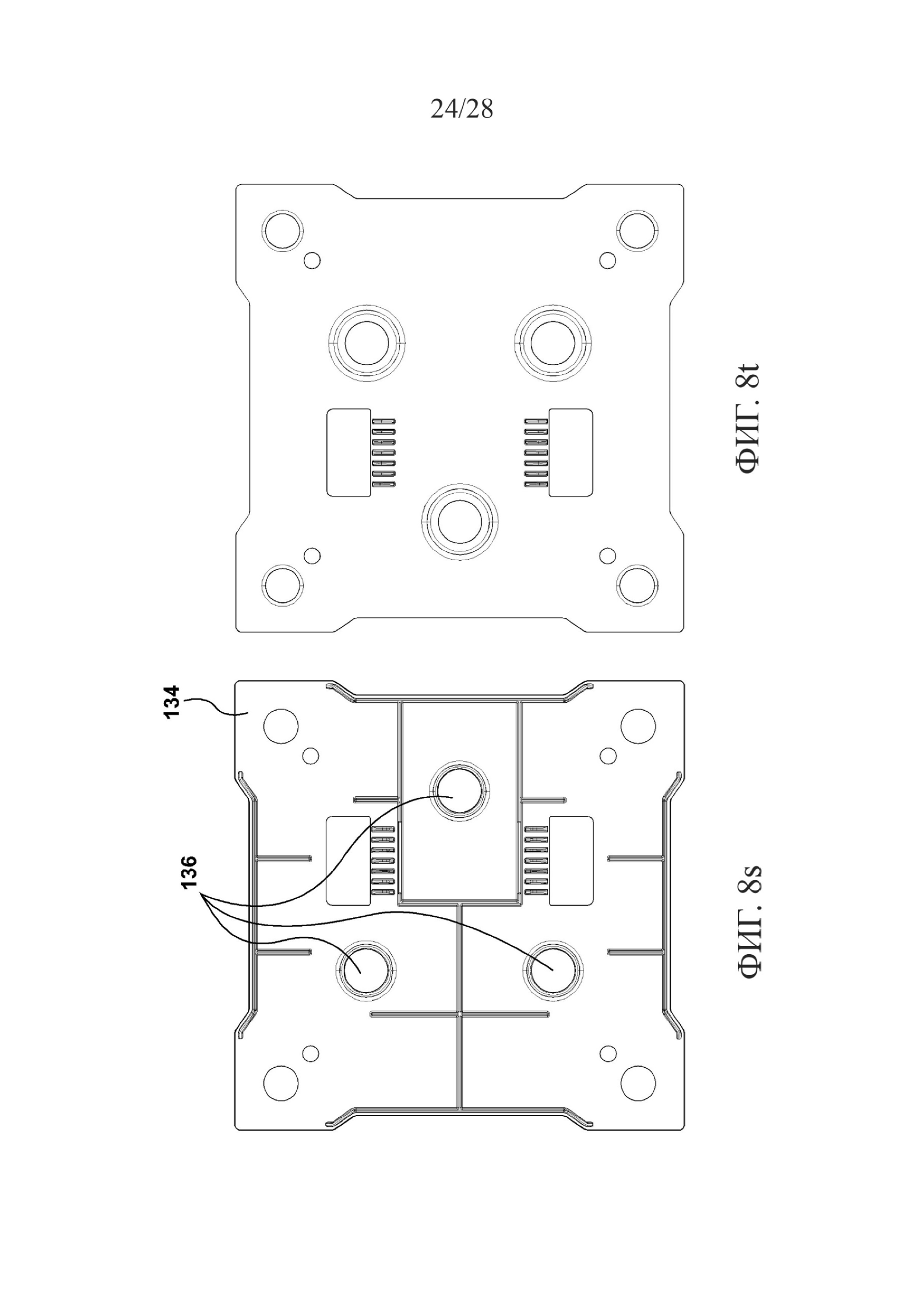
[0059] На фиг. 8S представлен вид сверху пластины основания фиг. 8N.
[0060] На фиг. 8Т представлен вид снизу пластины основания фиг. 8N.
[0061] На фиг. 9А представлен изометрический вид кронштейна для установки датчика.
[0062] На фиг. 9В представлен еще один изометрический вид кронштейна для установки датчика.
[0063] На фиг. 9С представлен вид сбоку справа кронштейна для установки датчика.
[0064] На фиг. 9D представлен вид спереди кронштейна для установки датчика.
[0065] На фиг. 9Е представлен вид сбоку слева кронштейна для установки датчика.
[0066] На фиг. 9F представлен вид сзади кронштейна для установки датчика.
[0067] На фиг. 9G представлен вид сверху кронштейна для установки датчика.
[0068] На фиг. 9Н представлен вид снизу кронштейна для установки датчика.
Подробное раскрытие настоящего изобретения
[0069] Следующее подробное описание содержит в целях объяснения многочисленные конкретные варианты осуществления, варианты исполнения, примеры и подробности, чтобы обеспечить полное понимание изобретения. Однако очевидно, что варианты осуществления могут быть реализованы на практике без этих конкретных деталей или с эквивалентной компоновкой. В других случаях некоторые хорошо известные структуры и устройства показаны в форме блок-схемы, чтобы избежать ненужного затруднения понимания вариантов осуществления изобретения. Описание никоим образом не должно быть ограничено иллюстративными вариантами исполнения, фигурами и технологиями, проиллюстрированными ниже, включая иллюстративные конструкции и варианты исполнения, проиллюстрированные и описанные в данном документе, но может быть изменено в пределах объема прилагаемой формулы изобретения наряду с полным объемом их эквивалентов.
[0070] В данном документе раскрыта и проиллюстрирована на фигурах новая система мониторинга бункера. Эта новая система мониторинга бункера обеспечивает новое решение давней проблемы управления поставками в кормовой промышленности: точный, экономичный мониторинг качества продукта в расположенных удаленно контейнерах для корма.
[0071] В варианте осуществления, изображенном на фиг. 1, система 10 мониторинга бункера содержит монтажную плату и корпус, вместе обозначенные ссылочным номером 100, кронштейн 200 для установки датчика и оптический датчик 300. В одном варианте осуществления оптическим датчиком 300 является датчик LIDAR. Во втором варианте осуществления оптическим датчиком 300 является времяпролетный (ToF) датчик машинного зрения.
[0072] На фиг. 2 представлена система 10 мониторинга уровня заполнения бункера, в которой датчиком 300 является датчик LIDAR. На фиг. 2а представлен увеличенный вид датчика LIDAR 300. Датчик LIDAR подвешен на кронштейне 200 для установки датчика внутри бункера 20 на потолке или крыше 22, 24 или на каком-либо подходящем верхнем элементе конструкции, таком как балка, ферма, рама и так далее. На фиг. 2 представлена луч 310 датчика LIDAR, который излучается вниз для отражения от корма 30 (или от другого сыпучего продукта) внутри бункера 20. В этом конкретном исполнении монтажная плата и корпус 100 установлены на наклонной части 22 крыши, тогда как кронштейн 200 для установки датчика соединен с вертикальным элементом конструкции 25 под плоской частью 24 крыши. Понятно, что кронштейн для установки датчика можно модифицировать, чтобы он имел иную геометрию, для установки еще одного элемента бункера, располагая в то же время датчик так, чтобы он был нацелен вниз.
[0073] На фиг. 3 представлен еще один вариант осуществления системы мониторинга уровня заполнения бункера, в которой датчиком 300 является времяпролетный (ToF) датчик. На фиг. 3а представлен увеличенный вид ToF датчика 300.
Как и в первом варианте осуществления, датчик 300 подвешен внутри бункера 20 так, чтобы он был нацелен вниз. ToF датчик машинного зрения захватывает изображения или трехмерные карты точек поверхности формы корма 30 внутри бункера 20. Карта точек поверхности определяет топологию 31 верхней поверхности корма, которая показана в качестве примера на фиг. 3b и на фиг. 3с. Это обеспечивает значительно более точную оценку количества корма внутри бункера. Как дополнительно проиллюстрировано на фиг. 3b и 3с, трехмерную карту поверхности 31 составляют из очень большого количества отдельных результатов (точек) глубины, что очень близко приближается к контурам и форме корма 30 в бункере 20.
[0074] На фиг. 4А-4Н представлен датчик LIDAR 300. Датчик LIDAR имеет одну или несколько линз 315 из кварцевого стекла и самоочищающееся обтирочное устройство 320. Обтирочное устройство имеет рычаг обтирочного устройства и упругое полотно 322 обтирочного устройства для чистки одной или нескольких линз 315. Обтирочное устройство можно поворачивать с помощью серво или другого типа электродвигателя. Для периодического запуска серводвигателя для поворота обтирочного устройства с целью чистки одной или нескольких линз может быть предоставлен контроллер. Контроллер может быть запрограммирован или выполнен с возможностью автоматической работы. Альтернативно, пользователь может перепрограммировать или переконфигурировать контроллер. В дополнительном варианте контроллер может быть выполнен с возможностью приема сигнала управления для протирки одной или нескольких линз. Сигнал управления может быть получен от монтажной платы в ответ на обнаружение, что датчик LIDAR сейчас работает неправильно, и требуется очистка.
[0075] На фиг. 5A-5I представлен времяпролетный (ToF) датчик машинного зрения 300. На фиг. 5 представлены компоненты датчика, которые включают в себя блок освещения и оптические устройства, которые фокусируют отраженный свет на датчик изображения (матрицу в фокальной плоскости). На датчике изображения каждый пиксель измеряет время, необходимое для прохождения света из блока освещения в точку на корме и назад в матрицу в фокальной плоскости. Датчик содержит управляющее электронное устройство для управления и синхронизации как блока освещения, так и датчика изображения.
[0076] На фиг. 6А-6Е и на фиг. 7 представлена монтажная плата 110, которая является частью узла 100 плата/корпус. Монтажной платой может быть печатная монтажная плата (РСВ), как показано, имеющая интегральную схему 112 слежения за точкой максимальной мощности (МРРТ), слот 114 SIM карты (модуля идентификации абонента) для приема SIM карты для RF приемопередатчика сотовой связи и плату 120 аккумулятора для приема аккумулятора. Монтажная плата также может иметь следующие дополнительные компоненты: разъем для заряда солнечной батареи, разъемы UART (универсального асинхронного приемника/передатчика), разъемы I/O, разъемы расширения модема ХВее®, разъемы grove и модуль Bluetooth®. Могут иметься другие компоненты. Также, не во всех вариантах осуществления имеются все эти компоненты. Порядок электроники на монтажной плате является всего лишь одним примером и понятно, что электроника может быть расположена на монтажной плате по любой другой подходящей схеме.
[0077] На фиг. 8А-8Т представлен корпус 130 для монтажной платы 110. Корпус 130 имеет верхнюю крышку 132 и основание или установочную пластину 134. Установочная пластина имеет гнезда 136 для магнитов. В конкретном варианте осуществления, показанном на фиг. 8А-8Т, установочная пластина имеет три гнезда для магнитов для прикрепления корпуса к крыше бункера. Магнитами могут быть магниты из редкоземельных металлов в одном конкретном варианте осуществления. Хотя корпус показан в общем квадратным с плоской верхней поверхностью, понятно, что форму корпуса в других вариантах осуществления можно изменить, например, чтобы закрыть монтажную плату с другой формой.
[0078] На фиг. 9А-9Н представлен кронштейн 200 для установки датчика. Кронштейн 200 в этом проиллюстрированном примере имеет верхнюю U-образную подвесную часть 210 с продолговатым отверстием 215, вертикальную часть 220, угловую часть 230 с еще одним продолговатым отверстием 235 и горизонтальную часть 240. Эта конкретная геометрия обеспечивает установку на вертикальный элемент и расположение датчика так, чтобы он был нацелен вниз на корм в нижней части бункера. Кронштейн может иметь другую геометрию для размещения других конструкций на крыше бункера и/или креплений датчиков разных типов. Размеры явно приведены только в качестве примера. Понятно, что размеры или пропорции можно изменить.
[0079] Система мониторинга бункера, описанная выше, обеспечивает точное измерение или оценку уровня заполнения бункера, то есть уровня корма в бункере. Понятно, что по уровню корма эта система определяет количество (массу или объем) корма внутри бункера. Система обеспечивает экономичный способ мониторинга уровней кормов и оповещения кормозавода, что требуется больше корма.
[0080] В одном конкретном варианте осуществления в системе использована печатная монтажная плата (РСВ) интернета вещей (IoT) для сбора данных датчика и для беспроводной передачи данных в один или несколько удаленно расположенных серверов (или других вычислительных устройств), где данные обрабатывают и отображают, например, на приборной панели или другом пользовательском интерфейсе, информирующем пользователя о состоянии заполнения бункера для корма. Эта система предоставляет ценную информацию, уведомления на основе параметров, заданных пользователем, и предлагает области для оперативного улучшения, определяемые алгоритмами и машинным обучением, которое со временем уточняет свои модели по мере анализа большего количества данных. Система в этом конкретном варианте осуществления питается от солнечной энергии и оснащена технологиями передачи данных, чтобы гарантировать, что система надежно передает данные на очень большие расстояния, потребляя при этом очень мало энергии, что позволяет системе работать без перебоев в течение многих лет. В этом конкретном варианте осуществления система содержит модуль радиосвязи. Как описано выше, система содержит монтажную плату, использующую несколько радиочастотных (RF) технологий для связи с удаленно расположенными серверами. Основным методом связи, используемым монтажной платой в этом конкретном варианте осуществления, является сотовая связь, например LTE категории M1, которая может работать в течение многих лет от одной батареи благодаря чрезвычайно энергоэффективной конструкции LTE Cat-M1. Таким образом, система способна связываться с одной или несколькими вышками сотовой связи в диапазоне более 25 км и использовать уже существующую инфраструктуру сотовой связи, чтобы минимизировать требования и сложность развертывания. В этом конкретном варианте осуществления на монтажной плате также имеется встроенный радиомодуль Bluetooth® Low Energy (BLE) для поддержки беспроводной конфигурации установщиками датчиков, а также для обеспечения альтернативного способа сотовой связи для будущего развертывания в сценариях ближнего действия. Монтажная плата поддерживает добавление альтернативных модулей радиосвязи через встроенные разъемы расширения ХВее, которые обеспечивают совместимость с широким спектром RF технологий связи (ZigBee, SigFox, WiFi и так далее) без необходимости переделывать или модернизировать оборудование, что делает его очень универсальным.
[0081] В этом одном конкретном исполнении РСВ имеет ряд встроенных вариантов подключения для защищенности в будущем и чтобы обеспечить совместимость с рядом датчиков и источников выходного сигнала. Интерфейсы UART обеспечивают основной способ связи с внешними датчиками, однако существует ряд других вариантов, обеспечивающих возможность быстрого прототипирования. Два встроенных разъема Grove обеспечивают совместимость платы с огромным набором ранее существовавших датчиков, использующих стандарт связи/питания Grove. Входы и выходы, подключенные к встроенному процессору, также предоставляют возможность считывать и влиять на состояние других подключенных устройств.
[0082] В этом одном конкретном исполнении монтажная плата работает исключительно от аккумулятора и солнечной энергии и имеет прогнозируемый срок службы пять или более лет, работая полностью автономно. Монтажная плата не требует жесткого подключения к источнику питания или подключения к электрической розетке. Возможность установки системы в бункере без жесткого подключения к внешнему источнику питания делает установку системы быстрой и простой неквалифицированными рабочими.
[0083] В этом одном конкретном исполнении в системе питания используется встроенный чип отслеживания точки максимальной мощности (МРРТ) или интегральная схема (IC), предназначенная для отслеживания и регулировки схемы зарядки от солнечной батареи, чтобы обеспечить, что зарядка всегда происходит с максимальной эффективностью в зависимости от погодных условий. Этот чип МРРТ в сочетании с аккумулятором, способным работать в течение 55 или более дней без солнечного света, обеспечивает длительную работу. Монтажная плата была разработана с возможностью диагностики, чтобы обеспечить раннее предупреждение об условиях электропитания, которые могут потребовать дополнительного внимания со стороны сервисной группы. Монтажная плата может передавать по беспроводной сети диагностический отчет на сервер или удаленное вычислительное устройство.
[0084] Как отмечено выше, в одном варианте осуществления датчик представляет собой датчик LIDAR. Датчик LIDAR может работать в течение многих лет, не требуя технического обслуживания или ремонта, несмотря на пыль, колебания температуры и другие неблагоприятные условия внутри бункера для корма. Датчик полностью закрыт одной или несколькими линзами из кварцевого стекла. Как описано и проиллюстрировано, датчик содержит самоочищающееся обтирочное устройство для очистки линз из кварцевого стекла с равными интервалами. Как описано и проиллюстрировано, датчик устанавливают в бункер с помощью кронштейна для установки датчика. Кронштейн для установки датчика обеспечивает установку датчика в бункер для корма любой формы и размера. Кронштейн для установки датчика содержит хомут, окружающий отверстие в крышке бункера для корма. Кронштейн датчика висит на этом хомуте и крепится с помощью составной силы, создаваемой затягиванием специального болта, затянутого на внутренней стороне хомута крышки. Внутри бункера кронштейн выходит из отверстия, гарантируя защиту самого датчика во время наполнения бункера. Этот кронштейн обеспечивает быструю установку. Провод датчика проложен под крышкой к внешней стороне бункера, где он соединяется с РСВ и корпусом. Как описано выше, во втором варианте осуществления датчик представляет собой времяпролетный (ToF) датчик машинного зрения или ToF камеру. Датчик ToF использует передовой метод определения дальности и профилирования. Датчик ToF продемонстрировал беспрецедентную способность моделировать поверхность продукта внутри контейнера для корма. Используя 57000 уникальных точек глубины, датчик может восстановить высокоточный трехмерный профиль поверхности, по которому можно точно рассчитать объем бункера. Конечно, в других вариантах количество точек глубины может быть изменено в зависимости от разрешения конкретной используемой камеры ToF. Этот уникальный подход к мониторингу уровня корма обеспечивает точное определение системой таких аномалий, как «образование перемычек корма» и «налипание», предотвращая ошибочные или ложные показания. Технология машинного зрения обеспечит сбор с помощью полностью автономной и неинтрузивной технологии точных показаний уровня заполнения бункеров при небольшой доле стоимости конкурирующих технологий.
[0085] В этом одном конкретном исполнении корпус системы содержит встроенную солнечную панель для обеспечения непрерывной зарядки аккумулятора корпуса даже в условиях низкой освещенности. Корпус также был спроектирован таким образом, чтобы избежать необходимости модификации бункера для корма. В монтажном кронштейне использованы три сферических магнита из редкоземельных металлов, ориентированных так, чтобы они образовали низкопрофильный треножник. Такая ориентация в виде треножника делает кронштейн совместимым со всеми формами и размерами бункеров для корма, независимо от радиуса или наклона крыши. В одном конкретном исполнении магниты вместе создают удерживающую силу 60 фунтов, что позволяет быстро устанавливать или снимать всю систему без необходимости постоянно модифицировать бункер для корма.
[0086] Еще одним аспектом раскрытия изобретения является способ мониторинга уровня заполнения бункера. Способ предусматривает этапы, действия или операции оптического определения уровня корма внутри бункера для корма, передачи сигнала уровня за счет оптического определения уровня корма, обработки сигнала уровня для генерирования данных уровня заполнения бункера и передачи данных уровня заполнения бункера, этапы способа, действия или операции можно выполнять последовательно или одновременно, то есть с наложением во времени.
[0087] В одном исполнении способа этап оптического определения уровня корма выполняют с помощью датчика LIDAR. В другом исполнении способа этап оптического определения уровня корма выполняют с помощью времяпролетного (ToF) датчика машинного зрения.
[0088] В одном исполнении способ дополнительно предусматривает этап очистки стеклянных линз датчика LIDAR с использованием самоочищающегося обтирочного устройства.
[0089] В одном исполнении способ дополнительно предусматривает этап заряда аккумулятора, соединенного с монтажной платой, с использованием солнечной панели на корпусе монтажной платы.
[0090] В одном исполнении способ дополнительно предусматривает этап приема данных уровня заполнения бункера сервером, кластером серверов, облачным хранилищем или другим вычислительным устройством.
[0091] В одном исполнении способ дополнительно предусматривает этапы генерирования и передачи сервером сообщения заказа для заказа большего количества кормов. Сообщение заказа может быть любым подходящим сообщением типа дейтаграммы, передаваемым в электронном виде с сервера на компьютер или вычислительное устройство, связанное с кормозаводом. Сообщение может дополнительно указывать, сколько корма осталось в бункере и/или дату, когда предполагается, что корм закончится. Сервер также может быть сконфигурирован для приема данных из нескольких бункеров и для компиляции данных для обеспечения совокупной оценки того, сколько корма доступно на конкретной ферме и/или для прогнозирования, когда на ферме закончится корм.
[0092] Следует понимать, что формы единственного числа включают в себя множественное число, если из контекста явно не следует иное. Таким образом, например, ссылка на «устройство» включает в себя ссылку на одно или несколько таких устройств, то есть на то, что существует по меньшей мере одно устройство. Термины «содержащий», «имеющий», «включающий в себя», «влекущий за собой» и «включающий» или их варианты временной формы глагола должны толковаться как неограничивающие термины (то есть означающие «включая, но без ограничения»), если не отмечено иное. Все способы, описанные в данном документе, могут выполняться в любом подходящем порядке, если иное не указано в данном документе или иным образом явно не противоречит контексту. Использование примеров или иллюстративного языка (например, «такой как») предназначено просто для лучшей иллюстрации или описания вариантов осуществления изобретения и не предназначено для ограничения объема изобретения, если не заявлено иное.
[0093] Хотя в настоящем раскрытии представлено несколько вариантов осуществления, следует понимать, что раскрытые системы и способы могут быть реализованы во многих других конкретных формах, не выходя за рамки объема настоящего раскрытия. Настоящие примеры следует рассматривать как иллюстративные, а не как ограничительные, и отсутствует намерение ограничения приведенными в данном документе деталями. Например, различные элементы или компоненты могут быть объединены или интегрированы в другую систему, или определенные функции могут быть опущены или не реализованы.
[0094] Кроме того, методы, системы, подсистемы и способы, описанные и проиллюстрированные в различных вариантах осуществления как дискретные или отдельные, могут быть объединены или интегрированы с другими системами, модулями, технологиями или способами без отклонения от объема настоящего раскрытия. Другие элементы, показанные или обсуждаемые как связанные или непосредственно связанные или взаимодействующие друг с другом, могут быть соединены не прямо или взаимодействовать через некоторый интерфейс, устройство или промежуточный компонент, электрически, механически или иным образом. Другие примеры изменений, замен и переделок могут быть установлены специалистом в данной области и могут быть выполнены без отклонения от концепции (концепций) изобретения, раскрытого в данном документе.
Реферат
Система мониторинга уровня заполнения бункера, причем система мониторинга уровня заполнения бункера содержит оптический датчик для определения уровня корма внутри бункера для корма, монтажную плату, связанную с возможностью передачи данных с датчиком для приема сигнала уровня от датчика и для обработки сигнала уровня для генерирования данных уровня заполнения бункера, аккумулятор для питания монтажной платы и датчика, корпус для содержания монтажной платы и радиопередатчик для передачи данных уровня заполнения бункера. Датчиком может быть датчик LIDAR или времяпролетный (ToF) датчик. Кронштейн для установки датчика для установки датчика внутри бункера содержит: верхнюю подвесную часть, которая установлена на вертикальном элементе конструкции крыши, причем подвесная часть содержит отверстие для приема крепежного приспособления для прикрепления подвесной части к вертикальному элементу конструкции; вертикальную часть, проходящую вниз от подвесной части; угловую часть, проходящую наклонно от вертикальной части и под подвесной частью; и горизонтальную часть, проходящую от угловой части и имеющую нижнюю сторону, на которой установлен датчик. Технический результат - точное измерение или оценка уровня заполнения бункера, то есть уровня корма в бункере. 2 н. и 22 з.п. ф-лы, 9 ил.

Комментарии