Способ (варианты) и система для прогнозирования остаточного ресурса фильтра транспортного средства - RU2717575C2
Код документа: RU2717575C2
Чертежи











Описание
Область техники
Настоящая заявка относится к способам, выполняемым в транспортных средствах, например, гибридных транспортных средствах, для оценки остаточного ресурса какого-либо компонента транспортного средства путем статистического прогнозирования.
Уровень техники и раскрытие изобретения
Транспортные средства содержат различные компоненты, ухудшение характеристик которых происходит с разной скоростью, в связи с чем их техническое обслуживание нужно проводить в разное время. Скорость ухудшения характеристик каждого из компонентов также может зависеть от множества параметров, одни из которых являются общими для разных компонентов, а другие - нет. Например, ухудшение характеристик системного аккумулятора в гибридно-электрическом транспортном средстве может зависеть от интенсивности использования аккумулятора, его срока службы, температурных режимов, типа аккумулятора и т.п. В качестве другого примера, ухудшение характеристик воздушного фильтра, соединенного с впускной системой двигателя, может зависеть от срока годности фильтра, качества воздуха, метеоусловий и т.п.
Разработан ряд решений для оценки степени исправности того или иного компонента транспортного средства. Один пример решения для определения степени исправности фильтра всасываемого воздуха путем статистического анализа раскрыт Вердеганом (Verdegan) с соавторами в документе US 9,061,224. Это решение предусматривает использование алгоритма для вычисления остаточного срока годности фильтра, при этом используемые в алгоритме постоянные выбирают в зависимости от лабораторных и статистических показателей фильтра. Кроме того, постоянные обновляют в процессе использования фильтра в зависимости от показателей работы фильтра, определяемых по измеренному перепаду давления на фильтре. Другой пример решения раскрыт Голдбергом (Goldberg) в документе US 7,174,273. В нем загрязнение фильтра выводят из измеренного роста перепада давления на фильтре относительно прогнозного перепада давления.
Однако авторы настоящего изобретения выявили ряд недостатков таких решений. Например, в основе вышеуказанных решений лежат статистические анализы, для которых может быть нужен большой объем вычислений. Как следствие, они могут требовать наличия больших ресурсов памяти и процессора для оценки исправности воздушного фильтра. В качестве другого примера, число имеющихся измеренных значений перепада давления может быть ограничено, так как не все системы двигателя содержат датчик перепада давления вблизи воздушного фильтра. В некоторых системах двигателя вблизи воздушного фильтра могут отсутствовать какие-либо датчики давления. В качестве еще одного примера, влияния разных параметров работы на измерение давления могут быть не быть напрямую учтены, в результате чего возникает нежелательная систематическая погрешность оценок. В качестве другого примера, водитель может не быть способен понять, сколько времени осталось до того, как воздушный фильтр нужно будет заменить, если степень исправности фильтра указана в виде процентного ухудшения характеристик. Водитель может заменить фильтр до того, как ресурс фильтра будет полностью выработан, в результате чего использование фильтра будет неэффективным и неэкономичным. Или же водитель может отсрочить замену фильтра, ставя под угрозу работу транспортного средства. Водитель транспортного средства также может не быть способен своевременно изменить характеристики своего вождения во избежание ухудшения характеристик фильтра.
В одном примере некоторые из вышеуказанных недостатков позволяет устранить способ для транспортного средства, в котором: указывают наличие состояния ухудшения характеристик фильтра всасываемого воздуха на основании того, что разброс показаний потока воздуха меньше ожидаемого, когда угол открытия дросселя больше верхнего порога. Это позволяет точнее прогнозировать остаточный срок годности компонента транспортного средства, например, воздушного фильтра, и передавать данную информацию водителю транспортного средства в более понятной форме.
Например, в переходных режимах работы двигателя контроллер может изменять положение впускного дросселя и измерять соответствующее изменение массового расхода воздуха (МРВ) в коллекторе (МРВ) или давления воздуха в коллекторе (ДВК) посредством датчиков ниже по потоку от дросселя. Весомость показаний, присваиваемая им контроллером, может быть тем больше, чем больше градус угла открытия дросселя (например, 55 и более градусов), при которых они получены, в связи с тем, что влияние «загрязненности» фильтра на МРВ (и ДВК) тем больше, чем больше углы открытия дросселя. Далее контроллер может выполнить статистический анализ собранных данных, включающий в себя рекурсивную оценку и среднего значения, и значения среднеквадратического отклонения МРВ относительно опорных значений для угла открытия дросселя. Далее результаты можно сравнить с соответствующими значениями для чистого воздушного фильтра. Затем контроллер может определить исправность фильтра по средним значениям и значениям среднеквадратического отклонения МРВ относительно опорных значений. В одном примере, чем больше среднее значение МРВ и/или среднеквадратическое отклонение МРВ при относительно больших углах открытия дросселя падает относительно порога, тем больше может быть коэффициент загрязненности фильтра, и тем меньше может быть степень исправности фильтра. Степень исправности также можно обновить с учетом метеоусловий, могущих стать причиной внезапного загрязнения фильтра (например, внезапной пыльной бури или снежной бури, могущих стать причиной загрязнения фильтра). Далее, замеренную степень исправности можно преобразовать в оценочный остаточный ресурс фильтра, включающий в себя время и/или пробег транспортного средства, оставшиеся до того, как нужно будет заменить воздушный фильтр или выполнить его техническое обслуживание. Данное преобразование может быть выполнено в зависимости от замеренной степени исправности фильтра, а также от статистики вождения транспортного средства, включающей в себя время и/или пробег, уже пройденные транспортным средством, а также от особенностей и привычек вождения водителя.
Это позволяет точно прогнозировать остаточный ресурс компонента транспортного средства без применения алгоритмов с большим объемом вычислений. Применение данных, замеренных в пределах транспортного средства, совместно со статистикой вождения транспортного средства, позволяет точнее вычислять степень исправности компонента. Например, внутреннее сопротивление и емкость системного аккумулятора можно определять лучше, если учитывать тепловые воздействия, а также воздействия из-за агрессивной манеры вождения водителя. В качестве другого примера, можно точнее прогнозировать степень загрязнения воздушного фильтра путем рекурсивной оценки средних значений и значений среднеквадратического отклонения потока воздуха при больших проходах дросселя. Оценка воздушного фильтра по показаниям потока воздуха или давления в коллекторе, замеренным в переходных режимах транспортного средства позволяет использовать больше данных, собранных за цикл езды транспортного средства, для прогнозирования состояния фильтра. Кроме того, это уменьшает необходимость активного удержания двигателя в определенной области частот вращения и нагрузок для выполнения алгоритма прогнозирования или диагностики. Преобразование замеренной степени исправности в оценочное значение оставшегося времени или периода работы транспортного средства до технического обслуживания компонента позволяет лучше информировать водителя транспортного средства о состоянии компонента. Это обеспечивает возможность своевременного технического обслуживания компонента, что улучшает эксплуатационные показатели транспортного средства. Прогнозирование остаточного ресурса компонента транспортного средства путем рекурсивной оценки статистических характеристик позволяет прогнозировать остаточный ресурс компонента с меньшим объемом вычислений без ущерба для точности прогноза. Это позволяет предусмотреть запас, лучше обеспечивающий безопасную эксплуатацию компонента, для оценочного остаточного ресурса. Функция прогнозирования обеспечивает возможность заблаговременного указания остаточного ресурса компонента, чтобы пользователь мог заранее запланировать техническое обслуживание и избежать отказа компонента. Кроме того, может быть обеспечена удобная оценка в режиме реального времени в составе простого в реализации пакета. Следует понимать, что вышеприведенное краткое раскрытие изобретения служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно в разделе «Осуществление изобретения». Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного объекта изобретения, объем которого однозначно определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный объект изобретения не ограничен вариантами осуществления, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание фигур чертежей
ФИГ. 1 схематически изображает пример осуществления цилиндра в двигателе внутреннего сгорания в системе гибридного транспортного средства.
На ФИГ.2 представлен пример профилей ресурса в процентах для компонента транспортного средства, работающего в разных условиях.
ФИГ. 3 изображает высокоуровневую блок-схему для прогнозирования и диагностики компонента транспортного средства с использованием замеренных данных и статистических оценок.
ФИГ. 4 изображает высокоуровневую блок-схему примера способа для применения статистической оценки к замеренной степени исправности компонента транспортного средства для прогнозирования остаточного ресурса компонента.
ФИГ. 5 изображает пример алгоритма с возможностью использования для прогнозирования остаточного ресурса аккумулятора транспортного средства.
ФИГ. 6 изображает блок-схему примера алгоритма с возможностью использования для прогнозирования остаточного ресурса аккумулятора транспортного средства.
На ФИГ.7 представлены диаграммы, изображающие примеры трендов изменения состояния емкости и сопротивления аккумулятора транспортного средства во времени.
ФИГ.8 изображает пример алгоритма с возможностью использования для прогнозирования остаточного ресурса фильтра всасываемого воздуха двигателя транспортного средства.
На ФИГ. 9 представлена диаграмма, иллюстрирующая пример изменения потока воздуха в коллекторе через воздушный фильтр при разных углах открытия впускного дросселя.
На ФИГ. 10 и 11 представлен пример экспериментальных данных, описывающих изменения среднего значения и значения среднеквадратического отклонения потока воздуха в коллекторе при изменении угла открытия дросселя для фильтров с разными степенями загрязнения.
ФИГ. 12 графически описывает изменение среднего значения и значения среднеквадратического отклонения потока воздуха в коллекторе при изменении угла открытия дросселя для фильтров с разными степенями загрязнения.
Осуществление изобретения
Нижеследующее описание относится к системам и способам для прогнозирования остаточного ресурса компонента системы гибридного транспортного средства, например, системы транспортного средства на ФИГ. 1. Контроллер двигателя может быть выполнен с возможностью выполнения алгоритма управления, например, алгоритмов на ФИГ. 3 и 4, для использования статистических способов для прогнозирования остаточного ресурса компонента транспортного средства. Контроллер может учитывать статистику ухудшения характеристик компонента, а также характеристики вождения транспортного средства, для построения профилей ресурса в процентах, например, профилей на ФИГ. 2. Далее контроллер может использовать профиль ресурса в процентах для извещения водителя транспортного средства о времени или расстоянии, оставшихся до того, как нужно будет выполнить техническое обслуживание компонента. Затем можно соответствующим образом отрегулировать работу транспортного средства. В алгоритме прогнозирования остаточного ресурса аккумулятора транспортного средства (например, алгоритме на ФИГ. 6-7) можно использовать замеренные и прогнозные изменения сопротивления и емкости аккумулятора, как раскрыто на примере ФИГ. 7. В алгоритме прогнозирования остаточного ресурса фильтра всасываемого воздуха двигателя (например, алгоритме на ФИГ. 8) можно использовать замеренные изменения потока воздуха в коллекторе при изменении положения дросселя в переходных режимах, как раскрыто на примере ФИГ. 9. Далее контроллер может прогнозировать остаточный ресурс воздушного фильтра на основе рекурсивной оценки среднего значения и среднеквадратического отклонения замеренного потока воздуха в коллекторе, как раскрыто на примере ФИГ. 10-12. Это позволяет лучше обеспечить регулярное техническое обслуживание компонентов.
На ФИГ. 1 изображен пример камеры сгорания или цилиндра двигателя 10 внутреннего сгорания. Двигатель 10 может быть установлен в движительной системе автотранспортного средства, например, системы 5 транспортного средства. В одном примере система 5 транспортного средства может представлять собой систему гибридно-электрического транспортного средства.
Двигателем 10 можно как минимум частично управлять с помощью системы управления, содержащей контроллер 12, и управляющих воздействий водителя 130 транспортного средства через устройство 132 ввода. В данном примере устройство 132 ввода содержит педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала положения педали (ПП). Цилиндр 14 (в настоящем описании также именуемый «камера 14 сгорания») двигателя 10 может содержать стенки 136 камеры сгорания с расположенным между ними поршнем 138. Поршень 138 может быть соединен с коленчатым валом 140 для преобразования возвратно-поступательного движения поршня во вращение коленчатого вала. Коленчатый вал 140 может быть соединен с как минимум одним ведущим колесом пассажирского транспортного средства через систему трансмиссии. С коленчатым валом 140 также может быть соединен стартер (не показан) через маховик для пуска двигателя 10.
Всасываемый воздух может поступать в цилиндр 14 по ряду воздухозаборных каналов 142, 144 и 146. Воздух, поступивший по воздухозаборному каналу 142, может проходить фильтрацию в воздушном фильтре 135 прежде, чем воздух поступит в воздушные каналы 144, 146. Воздухозаборный канал 146 выполнен с возможностью сообщения и с другими цилиндрами двигателя 10 помимо цилиндра 14. В некоторых примерах один или несколько заборных каналов могут содержать устройство наддува, например, турбонагнетатель или механический нагнетатель. Например, на ФИГ. 1 изображен двигатель 10, выполненный с турбонагнетателем, содержащим компрессор 174, расположенный между заборными каналами 142 и 144, и газовую турбину 176, расположенную вдоль выпускного канала 148. Компрессор 174 может как минимум частично приводить в действие газовая турбина 176 посредством вала 180, если устройство наддува выполнено как турбонагнетатель. Однако в других примерах, где двигатель 10 выполнен с механическим нагнетателем, газовая турбина 176 может необязательно отсутствовать, а компрессор 174 может быть выполнен с механическим приводом от мотора или двигателя. Дроссель 162 с дроссельной заслонкой 164 может быть расположен вдоль заборного канала двигателя для изменения расхода и/или давления всасываемого воздуха, подаваемого в цилиндры двигателя. Например, дроссель 162 может быть расположен ниже по потоку от компрессора 174, как на ФИГ. 1, или выше по потоку от компрессора 174.
В выпускной канал 148 могут поступать отработавшие газы и из других цилиндров двигателя 10 помимо цилиндра 14. Датчик 128 отработавших газов показан соединенным с выпускным каналом 148 выше по потоку от устройства 178 снижения токсичности выбросов. Датчик 128 можно выбрать из числа подходящих для определения воздушно-топливного отношения в отработавших газах, например: линейный датчик кислорода или УДКОГ (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный датчик кислорода или ДКОГ (как показано на фигуре), НДКОГ (нагреваемый ДКОГ), датчик оксидов азота, углеводородов или угарного газа. Устройство 178 снижения токсичности выбросов может представлять собой трехкомпонентный каталитический нейтрализатор (ТКН), накопитель оксидов азота, устройство снижения токсичности выбросов какого-либо иного типа или их комбинацию.
Любой цилиндр двигателя 10 может содержать один или несколько впускных клапанов и один или несколько выпускных клапанов. Например, цилиндр 14 показан содержащим как минимум один подъемный впускной клапан 150 и как минимум один подъемный выпускной клапан 156, расположенные в верхней области цилиндра 14. В некоторых примерах любой цилиндр двигателя 10, в том числе цилиндр 14, может содержать как минимум два подъемных впускных клапана и как минимум два подъемных выпускных клапана в верхней области цилиндра.
Впускным клапаном 150 может управлять контроллер 12 через привод 152. Аналогичным образом, выпускным клапаном 156 может управлять контроллер 12 через привод 154. В некоторых состояниях контроллер 12 может изменять сигналы, направляемые приводам 152 и 154, для регулирования открытия и закрытия соответственно впускных и выпускных клапанов. Положение впускного клапана 150 и выпускного клапана 156 могут определять соответствующие датчики положения клапанов (не показаны). Приводы клапанов могут быть электрическими или кулачковыми, либо представлять собой какую-либо их комбинацию. Фазы газораспределения впускного и выпускного клапана можно регулировать одновременно, либо использовать возможности изменения фаз кулачкового распределения, двойного независимого изменения фаз кулачкового распределения или фиксированные фазы кулачкового распределения. Каждая система кулачкового привода может содержать один или несколько кулачков с возможностью использования одной или нескольких из следующих систем: переключения профиля кулачков (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз газораспределения (ИФГ) и/или изменения высоты подъема клапанов (ИВПК) с возможностью управления контроллером 12 для регулирования работы клапанов. Например, цилиндр 14 может содержать электроприводной впускной клапан и выпускной клапан с кулачковым приводом, содержащим ППК и/или ИФКР, или наоборот. В других примерах впускные и выпускные клапаны могут иметь общий привод или систему привода, или привод или систему изменения фаз газораспределения.
Цилиндр 14 может иметь степень сжатия, представляющую собой отношение объема при нахождении поршня 138 в нижней точке к объему при нахождении поршня в верхней точке. В одном примере степень сжатия лежит в диапазоне от 9:1 до 10:1. Однако в некоторых примерах, где используют разные топлива, степень сжатия может быть выше. Это возможно, например, при использовании топлив с высоким октановым числом или высокой скрытой теплотой парообразования. Степень сжатия также может быть выше при использовании непосредственного впрыска в связи с влиянием последнего на детонацию в двигателе.
В некоторых примерах любой цилиндр двигателя 10 может содержать свечу 192 зажигания для воспламенения. Система 190 зажигания выполнена с возможностью подачи искры зажигания в камеру 14 сгорания с помощью свечи 192 зажигания по сигналу опережения зажигания (0З) от контроллера 12 в определенных режимах работы. Однако в некоторых вариантах осуществления свеча 192 зажигания может отсутствовать, например, в двигателе 10 с возможностью автоматического зажигания или зажигания при впрыске топлива, что может иметь место в некоторых дизельных двигателях.
В некоторых примерах любой цилиндр двигателя 10 может быть выполнен с одной или несколькими топливными форсунками для подачи в него топлива. В качестве неограничивающего примера, цилиндр 14 показан содержащим две топливные форсунки 166 и 170. Топливные форсунки 166 и 170 могут быть выполнены с возможностью подачи топлива, поступившего из топливной системы 8. Топливная система 8 может содержать один или несколько топливных баков, топливных насосов и топливных рамп. Топливная форсунка 166 показана соединенной непосредственно с цилиндром 14 для впрыска топлива непосредственно в него пропорционально длительности импульса сигнала ДИВТ-1, полученного от контроллера 12 через электронный формирователь 168. Так топливная форсунка 166 обеспечивает известный из уровня техники непосредственный впрыск топлива (далее также именуемый «НВ») в цилиндр 14 сгорания. Хотя на ФИГ. 1 форсунка 166 показана расположенной сбоку от цилиндра 14, она также может быть расположена над поршнем, например, рядом со свечой 192 зажигания. Такое расположение может способствовать лучшему смешиванию и сгоранию при работе двигателя на спиртосодержащем топливе из-за пониженной испаряемости некоторых спиртосодержащих топлив. Или же форсунка может быть расположена над впускным клапаном или рядом с ним для улучшения смешивания. Топливо может поступать в топливную форсунку 166 из топливного бака топливной системы 8 через топливный насос высокого давления и топливную рампу. Топливный бак также может содержать преобразователь давления с возможностью направления сигнала в контроллер 12.
Топливная форсунка 170 показана расположенной в заборном канале 146, а не в цилиндре 14, что обеспечивает известный из уровня техники впрыск топлива во впускной канал (далее также именуемый «ВТВК») выше по потоку от цилиндра 14. Топливная форсунка 170 выполнена с возможностью впрыска топлива, полученного из топливной системы 8, пропорционально длительности импульса сигнала ДИВТ-2, полученного от контроллера 12 через электронный формирователь 171. Отметим, что можно использовать единственный электронный формирователь 168 или 171 для обеих систем впрыска топлива или несколько формирователей, например электронный формирователь 168 для топливной форсунки 166 и электронный формирователь 171 для топливной форсунки 170, как показано на фигуре.
В другом примере каждая из топливных форсунок 166 и 170 может быть выполнена как форсунка непосредственного впрыска топлива непосредственно в цилиндр 14. В другом примере каждая из топливных форсунок 166 и 170 может быть выполнена как форсунка впрыска топлива во впускной канал выше по потоку от впускного клапана 150. В других примерах цилиндр 14 может содержать единственную топливную форсунку с возможностью получения различных топлив из топливных систем в виде топливной смеси с разным относительным количеством компонентов для впрыска топливной смеси либо непосредственно в цилиндр как топливная форсунка непосредственного впрыска или выше по потоку от впускных клапанов как форсунка впрыска во впускной канал. Таким образом, следует понимать, что раскрытые в настоящем описании топливные системы не ограничиваются конкретными конфигурациями топливных форсунок, приведенными в настоящем описании для примера.
Обе форсунки могут подавать топливо в цилиндр во время одного и того же рабочего цикла цилиндра. Например, каждая из форсунок выполнена с возможностью подачи части общего количества впрыскиваемого топлива для сжигания в цилиндре 14. Кроме того, распределение долей и/или относительное количество топлива, впрыскиваемого каждой из форсунок, могут быть разными в зависимости от параметров работы, например, нагрузки двигателя, детонации и температуры отработавших газов, как будет раскрыто ниже. Подача топлива впрыска во впускной канал может происходить, когда впускной клапан открыт, впускной клапан закрыт (например, по существу до начала такта впуска), а также во время работы как с открытым, так и с закрытым впускным клапаном. Подача топлива непосредственного впрыска может происходить во время такта впуска, а также частично во время предшествующего такта выпуска, во время такта впуска, и частично во время такта сжатия, например. То есть даже для одного события сгорания впрыск топлива может происходить в разные моменты из форсунок впрыска во впускной канал и непосредственного впрыска. Кроме того, для одного события сгорания можно выполнить несколько впрысков за рабочий цикл. Эти несколько впрысков можно выполнить во время такта сжатия, такта впуска или в период, являющийся какой-либо подходящей комбинацией этих тактов.
Характеристики топливных форсунок 166 и 170 могут отличаться друг от друга. Например, отличия могут заключаться в размере: отверстие одной форсунки может быть больше, чем у другой. Прочие отличия включают в себя, без каких-либо ограничений, следующие: разные углы распыла, разные рабочие температуры, разные ориентации, разные моменты впрыска, разные характеристики распыла, разные местоположения и т.п. Кроме того, в зависимости от соотношения долей топлива, впрыскиваемого форсунками 170 и 166, можно достичь разных результатов.
Топливные баки в топливной системе 8 выполнены с возможностью содержать разные топлива, например, топлива с разными свойствами и составами. В число различий могут входить: разное содержание спирта, разное содержание воды, разное октановое число, разная теплота парообразования, разные составы смеси и/или комбинации этих различий, и т.п.Одним из примеров топлив с разной теплотой парообразования может служить бензин в качестве топлива первого типа с меньшей теплотой парообразования и этанол в качестве топлива второго типа с большей теплотой парообразования. В другом примере в двигателе можно использовать бензин как топливо первого типа и спиртосодержащую топливную смесь, например, Е85 (приблизительно на 85% состоящую из этанола и на 15% из бензина) или М85 (приблизительно на 85% состоящую из метанола и на 15% из бензина), в качестве топлива второго типа. В число других возможных веществ входят вода, метанол, смесь спирта и воды, смесь воды и спирта, смесь спиртов и т.п.
В еще одном примере оба топлива могут представлять собой спиртовые смеси разного состава, причем топливо первого типа может представлять собой бензино-спиртовую смесь с относительно низкой концентрацией спирта, например, Е10 (с приблизительным содержанием этанола 10%), а топливо второго типа - бензино-спиртовую смесь с относительно высокой концентрацией спирта, например, Е85 (с приблизительным содержанием этанола 85%). В число отличий первого и второго топлив могут также входить такие параметры, как температура, вязкость, октановое число и т.п. Кроме того, характеристики топлива в одном или обоих топливных баках могут часто изменяться, например, в связи с тем, что в разные дни в них заправляют топливо с разными характеристиками.
Контроллер 12 показан на ФИГ. 1 в виде микрокомпьютера, содержащего микропроцессорное устройство 106, порты 108 ввода/вывода, электронный носитель информации для исполняемых программ и калибровочных значений, в данном примере показанный в виде однокристального постоянного запоминающего устройства 110 для хранения исполняемых инструкций, оперативное запоминающее устройство 112, энергонезависимое запоминающее устройство 114 и шину данных.
Помимо сигналов, речь о которых шла выше, контроллер 12 может принимать разнообразные сигналы от соединенных с двигателем 10 датчиков, в том числе: массового расхода всасываемого воздуха (МРВ) от датчика 122 массового расхода воздуха; барометрического давления отдатчика 137 БД; температуры охлаждающей жидкости двигателя (ТОЖД) отдатчика 116 температуры, соединенного с рубашкой 118 охлаждения; профиля зажигания (ПЗ) от датчика 120 на эффекте Холла (или датчика иного типа), соединенного с коленчатым валом 140; положения дросселя (ПД) от датчика положения дросселя; и абсолютного давления в коллекторе (ДВК) от датчика 124. Сигнал частоты вращения двигателя (ЧВД) может быть сформирован контроллером 12 из сигнала ПЗ. Сигнал давления в коллекторе (ДВК) от датчика давления в коллекторе может служить показанием разрежения или давления во впускном коллекторе. Контроллер 12 принимает сигналы от различных датчиков на ФИГ. 1 и задействует различные исполнительные устройства на ФИГ. 1 для регулирования работы двигателя в зависимости от полученных сигналов и в соответствии с командами в памяти контроллера. Например, в зависимости от сигнала длительности импульса, заданного контроллером формирователю, соединенному с форсункой непосредственного впрыска, из нее в соответствующий цилиндр может быть подана порция топлива. Примеры алгоритмов с возможностью осуществления их контроллером раскрыты на ФИГ. 3-5 и 8.
Как раскрыто выше, на ФИГ. 1 представлен только один цилиндр многоцилиндрового двигателя. При этом любой цилиндр может аналогичным образом содержать собственный комплект впускных и выпускных клапанов, топливную форсунку (форсунки), свечу зажигания и т.п. Следует понимать, что двигатель 10 может содержать любое подходящее количество цилиндров: 2, 3, 4, 5, 6, 8, 10, 12 и более. Кроме того, любой из этих цилиндров может содержать некоторые или все компоненты, раскрытые и изображенные на ФИГ. 1 на примере цилиндра 14.
В некоторых примерах транспортное средство 5 может представлять собой гибридное транспортное средство с возможностью подвода крутящего момента к одному или нескольким колесам 55 транспортного средства из нескольких источников. В других примерах транспортное средство 5 представляет собой традиционное транспортное средство только с двигателем или электрическое транспортное средство только с электрической машиной (машинами). В представленном примере транспортное средство 5 содержит двигатель 10 и электрическую машину 52. Электрическая машина 52 может представлять собой мотор или мотор-генератор. Коленчатый вал 140 двигателя 10 и электрической машины 52 связан посредством трансмиссии 54 с колесами 55 транспортного средства, когда одна или несколько муфт 56 находятся в зацеплении. В изображенном примере первая муфта 56 установлена между коленчатым валом 140 и электрической машиной 52, а вторая муфта 56 - между электрической машиной 52 и трансмиссией 54. Контроллер 12 может направлять сигнал исполнительному устройству каждой из муфт 56 для ввода муфты в зацепление или вывода ее из зацепления для соединения или разъединения коленчатого вала 140 и электрической машины 52 и связанных с нею компонентов и/или соединения или разъединения электрической машины 52 и трансмиссии 54 и связанных с нею компонентов. Трансмиссия 54 может представлять собой трансмиссию с коробкой передач, систему планетарной передачи или трансмиссию иного типа. В зависимости от типа силового агрегата, транспортное средство может быть выполнено как параллельный гибрид, последовательный гибрид или последовательно-параллельный гибрид.
Электрическая машина 52 получает электропитание от тягового аккумулятора 58 для подвода крутящего момента колесам 55 транспортного средства. Электрическую машину 52 также можно эксплуатировать как генератор для выработки электроэнергии для зарядки аккумулятора 58, например, во время торможения.
Различные компоненты транспортного средства могут требовать периодического технического обслуживания и диагностики. Кроме того, в зависимости от статистики технического обслуживания или ухудшения характеристик, остаточный ресурс каждого из компонентов может быть разным. Например, контроллер может время от времени диагностировать и рекурсивно оценивать остаточный ресурс системного аккумулятора транспортного средства, фильтра всасываемого воздуха (Авторы изобретения: укажите примеры других диагностируемых компонентов). Как подробнее раскрыто на примерах ФИГ. 3-5 и 8, контроллер транспортного средства может быть выполнен с возможностью применения алгоритма для статистического прогнозирования остаточного ресурса компонента по предыдущей статистике характера ухудшения характеристик компонента, замеренным данным о параметрах, относящихся к компоненту, а также диаграммам статистики вождения транспортного средства (например, статистики вождения транспортного средства в режиме реального времени или данным, собранным за текущий цикл езды транспортного средства). Затем контроллер может предоставить значимую информацию о компоненте водителю транспортного средства, например, в форме оценочного расстояния до технического обслуживания или времени до технического обслуживания.
Компоненты на ФИГ. 1 обеспечивают возможность создания системы транспортного средства, содержащей: двигатель; мотор с приводом от аккумулятора, датчики для измерения напряжения и тока аккумулятора; и контроллер. Контроллер может быть выполнен с машиночитаемыми инструкциями в долговременной памяти для: прогнозирования степени ухудшения характеристик аккумулятора по емкости и сопротивлению аккумулятора, определенных по замеренному току или напряжению аккумулятора, в том числе по прошлой статистике определенного сопротивления и емкости аккумулятора. Контроллер может содержать дополнительные инструкции для преобразования прогнозной степени ухудшения характеристик в оценочное значение оставшегося времени или периода для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем, в том числе - прошлой статистики определяемого показателя.
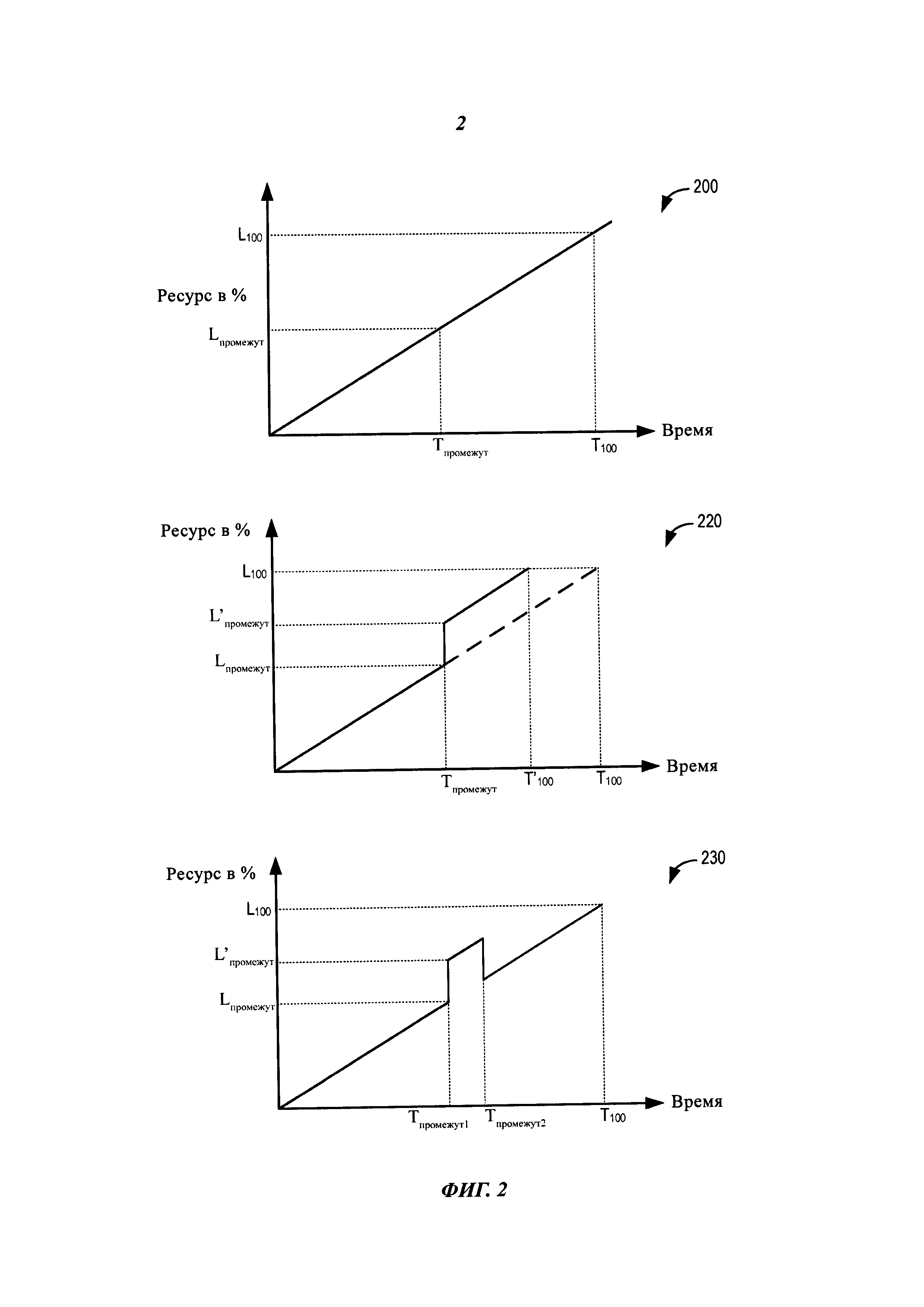
Компоненты на ФИГ. 1 также обеспечивают возможность создания системы транспортного средства, содержащей: двигатель, содержащий заборный канал; воздушный фильтр, соединенный с заборным каналом; впускной дроссель; датчик потока воздуха в коллекторе, установленный ниже по потоку от впускного дросселя; и контроллер. Контроллер может быть выполнен с машиночитаемыми инструкциями в долговременной памяти для: сохранения измеренных показаний потока воздуха, когда заданный командой угол открытия впускного дросселя превышает пороговый; оценки показателя, отражающего разброс значений потока воздуха в коллекторе, по сохраненным измеренным показаниям потока воздуха; прогнозирования степени ухудшения характеристик воздушного фильтра по соотношению оцененного показателя и порога; и преобразования прогнозной степени ухудшения характеристик в оценочное значение оставшегося времени или периода для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем, в том числе - прошлой статистики оцененного показателя. Например, прогнозирование может включать в себя прогнозирование большей степени ухудшения характеристик при падении оцененного показателя ниже порога. Показатель может представлять собой первый показатель, при этом контроллер может содержать дополнительные инструкции для оценки второго показателя, отражающего средний поток воздуха в коллекторе через воздушный фильтр. В этом случае прогнозирование может включать в себя прогнозирование большей степени ухудшения характеристик при падении второго показателя ниже порога. Указанный порог можно определять в зависимости от последнего по времени оценочного значения показателя, извлеченной из прошлой статистики оцененного показателя, и расстояния, пройденного транспортным средством с последней по времени оценки оцениваемого показателя. Или же указанный порог можно определять в зависимости от исходного оценочного значения показателя на момент установки воздушного фильтра, извлеченного из прошлой статистики оцененного показателя, и расстояния, пройденного транспортным средством с момента установки воздушного фильтра. Диаграммы 200, 220 и 230 на ФИГ. 2 представляют примеры моделей ухудшения характеристик для компонента транспортного средства. В каждом случае ось x представляет время, а ось у - ресурс в процентах, где Т100 представляет время достижения конца срока годности L100 компонента.
Характер ухудшения характеристик компонента, как правило, принимают постоянным от начала до конца временного периода срока годности. Например, если характер ухудшения характеристик принят постоянным, как в примере диаграммы 200, может быть определена модель линейного ухудшения характеристик, в которой остаточный ресурс вычисляют по уравнению: L = альфа * Т, где альфа - скорость ухудшения характеристик. В промежуточное время (Тпромежут.) до отказа компонента можно выполнить прогнозирование ресурса в процентах, представленного как Lпромежут. , для компонента. В данном случае Тпромежут. - это время, прошедшее с начала срока службы компонента (L0, когда компонент был впервые введен в эксплуатацию, например, после замены, после технического обслуживания, после восстановления и т.п.) до момента прогнозирования в реальном времени. Таким образом, по модели можно определить Lпромежут. как: Lпромежут. = альфа*Тпромежут. Далее остаточное время (TRL) до конца срока службы компонента определяют как:
TRL = (T100-Тпромежут.) = (L100-Lпромежут.)/алфа
Значение альфа оценивают в реальном времени в зависимости от ухудшения характеристик компонента (наблюдавшегося в прошлом между Т0 и Тпромежут.). L100 вводят в качестве входного параметра для определения конца срока службы компонента. Далее оценивают Lпромежут. в реальном времени с помощью алгоритма прогнозирования.
При этом возможны состояния, приводящие к внезапному изменению остаточного ресурса компонента, обусловленному характером эксплуатации компонента и воздействием факторов, вызывающих случайные изменения характеристик. Например, загрязнение фильтра всасываемого воздуха может происходить медленно с линейной скоростью ухудшения характеристик из-за накопления пыли на фильтре во время вождения и всасывания воздуха в двигатель. Однако при движении транспортного средства через снег или в условиях запыленности (например, при вождении в условиях пыльной бури), загрязнение воздушного фильтра может возрасти за относительно короткое время, причем очищение дополнительного загрязнения может произойти, а может и не произойти, в зависимости от типа скопления. В подобном случае, моделирование остаточного ресурса осуществляют все так же принимая скорость ухудшения характеристик постоянной в зависимости от прошлой статистики, с возможностью обновления этой скорости в режиме реального времени в зависимости от оценки состояний.
В примере модели на диаграмме 220 скорость ухудшения характеристик между Т0 и Тпромежут. может быть исходно принята постоянной. В момент Тпромежут. компонент может испытать воздействие резкого изменения, в связи с чем происходит изменение оценочного остаточного ресурса в процентах с Lпромежут. на L'промежут., где L'промежут. = Lпромежут. + дельтаL Приняв характер ухудшения характеристик между Т0 и Т'промежут. постоянным, как и между Т0 и Тпромежут., и поскольку Lпромежут. = альфа*Тпромежут., остаточный ресурс вычисляют следующим образом:
TRL = (Т100-Тпромежут.) = (L100-Lпромежут.-дельтаL)/альфа=(L100-L'промежут.)/альфа
Следует понимать, что резкое изменение может быть положительным или отрицательным, а уравнение применимо к обоим сценариям.
В примере модели на диаграмме 230 скорость ухудшения характеристик между Т0 и Тпромежут.1 может быть исходно принята постоянной. В момент Тпромежут.1 может произойти первое, положительное, резкое изменение, в связи с которым происходит изменение оценочного остаточного ресурса в процентах с Lпромежут на L'промежут.. Между Тпромежут.1 и Тпромежут. скорость ухудшения характеристик может быть принята постоянной. В момент Тпромежут.2 может произойти второе, отрицательное, резкое изменение, в связи с которым происходит возврат оценочного остаточного ресурса в процентах с L'промежут. до Lпромежут. Далее скорость ухудшения характеристик может быть вновь принята постоянной до L100. В качестве примера такого состояния, если воздушный фильтр был частично загрязнен из-за скопления снега, возможно резкое изменение степени исправности фильтра, в связи с чем происходит смещение остаточного ресурса фильтра вверх ближе к концу срока службы компонента. При этом, когда снег растает, или если фильтр будет удален, очищен и возвращен на место, произойдет другое резкое изменение степени исправности фильтра, которое переместит остаточный ресурс фильтра вниз.
На ФИГ. 3 раскрыт пример способа 300 для оценки остаточного ресурса компонента транспортного средства. Инструкции для осуществления способа 300 и остальных раскрытых в настоящем описании способов может исполнять контроллер в соответствии с инструкциями в памяти контроллера и во взаимосвязи с сигналами от датчиков системы двигателя, например, датчиков, раскрытых выше на примере ФИГ. 1. Контроллер может задействовать исполнительные устройства системы транспортного средства и системы двигателя для диагностики степени исправности компонента согласно раскрытым ниже способам. Способ позволяет прогнозировать степень ухудшения характеристик компонента транспортного средства по изменению значения показателя, относящегося к компоненту транспортного средства, от исходного значения показателя при установке в системе транспортного средства за период пробега транспортного средства. При прогнозировании также учитывают пройденное транспортным средством расстояние за указанный период, при этом данный показатель выводят из замеренного параметра работы транспортного средства. Способ также обеспечивает возможность преобразования прогнозной степени ухудшения характеристик в оценочное значение времени или период, оставшийся до того, как нужно будет выполнить техническое обслуживание компонента транспортного средства (или заменить его), для отображения водителю транспортного средства, при этом преобразование осуществляют в зависимости от данных статистики вождения в прошлом и прогнозного вождения в будущем.
На шаге 302 способа оценивают и/или измеряют параметры работы транспортного средства. В их число могут входить, например, скорость транспортного средства, частота вращения двигателя, положение педали, требуемый водителем крутящий момент, параметры окружающей среды (например, температура, давление и влажность окружающей среды), давление наддува, степень заряженности аккумулятора, поток воздуха в коллекторе, воздушно-топливное отношение отработавших газов, выбор передачи в трансмиссии, режим вождения (например, режим электрической тяги или тяги от двигателя; спортивный, режим производительности или экономии) и т.п.
На шаге 303 способ предусматривает выбор компонента для оценки. Компонент можно оценивать периодически. В этом случае выбор компонента можно осуществлять в зависимости от времени или пробега транспортного средства с последней по времени оценки компонента. В другом примере выбор может зависеть от активного запроса, полученного от водителя. Это может происходить в дополнение к периодической оценке или независимо от нее. Например, водитель может запросить прогноз для системного аккумулятора перед отправлением по запланированному маршруту движения.
На шаге 304 способ предусматривает нахождение статистики ухудшения характеристик или статистики технического обслуживания оцениваемого компонента. Оно включает в себя нахождение времени или периода, прошедшего с тех пор, как компонент был впервые установлен или введен в эксплуатацию в транспортном средстве. Или же оно может включать в себя нахождение времени или периода, прошедшего с последнего по времени технического обслуживания, ремонта или восстановления компонента. Кроме того, статистика технического обслуживания может включать в себя данные о скорости ухудшения характеристик компонента перед последним по времени событием технического обслуживания, исходной скорости ухудшения характеристик компонента, средней скорости ухудшения характеристик компонента за срок службы транспортного средства и любых диагностических кодах, относящихся к компоненту, включенных за срок службы транспортного средства.
На шаге 306 способ предусматривает определение степени исправности компонента по данным, замеренным в пределах транспортного средства. Как подробнее раскрыто на примерах ФИГ. 5 и 8, это включает в себя измерение одного или нескольких параметров, относящихся к компоненту, и сравнение данных, замеренных в текущем прогоне алгоритма, с данными, замеренными в предыдущем прогоне алгоритма, для обновления скорости ухудшения характеристик компонента (относительно исходной скорости) в реальном времени. Например, контроллер может прогнозировать степень ухудшения характеристик компонента транспортного средства по определяемому показателю, выводимому из замеренного параметра работы транспортного средства, в том числе - из прошлой статистики определяемого показателя. В одном примере компонент транспортного средства представляет собой системный аккумулятор, определяемый показатель - сопротивление аккумулятора и/или емкость аккумулятора, а замеренный параметр работы транспортного средства - ток аккумулятора и/или напряжение аккумулятора. В другом примере компонент транспортного средства представляет собой фильтр всасываемого в двигатель воздуха, определяемый показатель - среднее значение и/или значение среднеквадратического отклонения потока воздуха через фильтр, а замеренный параметр работы транспортного средства - поток воздуха в коллекторе. В любом случае замеренный параметр работы транспортного средства выбирают в зависимости от компонента транспортного средства, для которого выполняют прогноз.
С шага 306 способ следует на шаг 308, на котором диагностируют компонент по соотношению степени исправности (определенной по замеренным данным) и порога. Например, если будет определено, что оценочная степень исправности меньше установленного для данного компонента порога, компонент может быть признан неисправным, и водителю может быть указано, что нужен ремонт, техническое обслуживание или замена компонента.
Одновременно, с шага 306 способ следует на шаг 310, на котором находят статистику вождения транспортного средства. Статистика вождения транспортного средства может включать на себя, например, расстояние, пройденное за срок службы транспортного средства (например, по показанию одометра), число и частоту событий технического обслуживания, произошедших за срок службы транспортного средства (например, сколько раз были выполнены смазочно-заправочные работы, с какой частотой их выполняли, при каком показании одометра их выполняли), среднюю экономию топлива в транспортном средстве, среднюю скорость транспортного средства, среднее значение использования тех или иных передач в трансмиссии транспортного средства, среднее число миль, проходимых каждый день, среднее давление в шине транспортного средства и т.п.Статистика вождения транспортного средства также может включать в себя, например, свойственные водителю особенности и привычки вождения. Например, это может включать в себя предпочтение, отдаваемое водителем экономии топлива или эксплуатационным показателям, частоту и степень применения и нажатия педали (например, является ли водитель «тугодумом»), насколько водитель склонен к агрессивному вождению, среднюю скорость, с которой водитель водит и т.п. Статистика вождения транспортного средства также может включать в себя данные о метеоусловиях, при которых обычно происходит вождение транспортного средства, например, водит ли обычно водитель транспортное средство в дождь или снег, в сухих или влажных условиях и т.п. Характеристики вождения транспортного средства могут отражать тенденции вождения, свойственные водителю, и средние значения параметров, воздействующих на компонент транспортного средства, которые могут повлиять на исходную скорость ухудшения характеристик компонента.
На шаге 312 оценочную степень исправности компонента (в основе которой лежат замеренные данные) и найденную статистику вождения транспортного средства используют совместно для рекурсивной оценки времени или расстояния, оставшихся до ухудшения характеристик компонента. Например, оценочную степень исправности компонента можно обновить с учетом статистики вождения транспортного средства, а затем преобразовать обновленную степень исправности в оценочное значение времени/расстояние, оставшееся до того, как произойдет ухудшение характеристик компонента. В одном примере контроллер может использовать алгоритм, например, алгоритм на ФИГ. 6 или на ФИГ. 8, в комбинации с алгоритмом на ФИГ. 4, для преобразования обновленной степени исправности в оценочное значение времени/расстояние, оставшееся до того, как произойдет ухудшение характеристик компонента. Например, контроллер может преобразовать прогнозную степень ухудшения характеристик в оценочное значение оставшегося времени или периода для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем, в том числе - прошлой статистики определяемого показателя. Кроме того, прогнозную степень ухудшения характеристик можно преобразовать в оставшееся число дозаправок топливного бака для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем.
На шаге 314 контроллер может показать оценочное время/расстояние, оставшееся до ухудшения характеристик компонента, водителю транспортного средства, на экране дисплея центрального пульта транспортного средства.
На ФИГ. 4 раскрыт пример способа 400 для оценки времени или расстояния до технического обслуживания для компонента транспортного средства. В основе алгоритма лежит статистическое определение частоты или продолжительности вождения в зависимости от абсолютного времени. Оставшееся расстояние (или время) прогнозируют по скорости ухудшения характеристик компонента в прошлом совместно с прошлой статистикой вождения транспортного средства. Оценочное расстояние можно определять как произведение времени, оставшегося до ухудшения характеристик компонента (в днях), и расстояния, проходимого транспортным средством за день. Точность оценки расстояния можно дополнительно повысить путем учета отклонений в вождении (например, отклонений в вождении в конкретные дни недели или отклонения по неделям), и запаса, лучше обеспечивающего безопасную эксплуатацию компонента во время оценочного остаточного ресурса.
Например, в любой момент времени алгоритм может использовать модель скорости ухудшения характеристик для увеличения среднеквадратического отклонения следующим образом:
% ухудшения характеристики(t)=мюухудшения характеристик (t)+n * сигмаухудшения характеристик (t)
где n - коэффициент запаса, который можно уточнять, а мюухудшения характеристик (t) и сигмаухудшения характеристик (t) - результаты оценки в реальном времени с помощью модели ухудшения характеристик.
На шаге 402 способ предусматривает подтверждение того, что двигатель включен. Например, если транспортное средство является гибридным, можно получить подтверждение того, что транспортное средство работает в режиме тяги от двигателя или в режиме с поддержкой, в которых как минимум часть потребности в крутящем моменте обеспечивает крутящий момент двигателя. Если двигатель не включен, алгоритм можно завершить. В режиме электрической тяги, в связи с отсутствием потока воздуха через воздушный фильтр, ухудшения характеристик не ожидают. Это также касается и других компонентов, относящихся к бензиновому двигателю (например, масляному фильтру, насосу охлаждающей жидкости и т.п.). Другие компоненты, например, аккумулятор и генератор переменного тока, находятся в работающем состоянии во время эксплуатации в режиме электрической тяги. Поэтому можно осуществлять их контроль/прогнозирование, когда двигатель выключен.
На шаге 406 способ предусматривает приращение значения счетчика времени для обеспечения оценки прошедшего времени (t) в реальном времени. Далее, на шаге 408, способ предусматривает проверку того, был ли выполнен последний проход алгоритма в текущий день, когда происходит выполнение алгоритма («сегодня»). На шаге 410 способ предусматривает приращение значения расстояния, пройденного на момент t, следующим образом:
Расст (t) = расст (t-1)+Vtc * Δt,
где расст (t) - расстояние, пройденное на момент t, расст (t-1) - расстояние, пройденное на момент последнего прогона алгоритма (t-1), Vtc - скорость транспортного средства, a Δt - время, прошедшее с последнего прогона алгоритма.
На шаге 412 способ необязательно предусматривает рекурсивное обновление одного или нескольких статистических параметров данных, собранных для оцениваемого компонента, при этом в число одного или нескольких статистических параметров входят: среднее значение собранных данных (μсегодня(t)) и значение среднеквадратического отклонения собранных данных (σсегодня(t)). Далее обновленные значения сохраняют в виде функции от предыдущих значений, сохраненных при последнем прогоне алгоритма (например, на прошлой неделе), и пройденного расстояния (pacct(t)). В зависимости от ожидаемой частоты извещения об остаточном ресурсе компонента, являющегося предметом контроля/прогнозирования, или обновления указанного остаточного ресурса посредством алгоритма, алгоритм обновляют либо день за днем, либо в один и тот же день, если рассматриваемый компонент может быть предрасположен к быстрому ухудшению характеристик.
Вернемся на шаг 408: если выполнение текущего прохода алгоритма происходит в фиксированный день («сегодня»), выбранный для выполнения алгоритма, на шаге 420 может быть указано, что днем последнего прохода алгоритма является текущий день (сегодняшний день). На шаге 422 способ необязательно предусматривает рекурсивное обновление одного или нескольких статистических параметров данных, собранных для оцениваемого компонента, при этом в число одного или нескольких статистических параметров входят: среднее значение собранных данных (μсегодня-1(t)) и значение среднеквадратического отклонения собранных данных (σсегодня-1(t)). Далее обновленные значения сохраняют в виде функции от предыдущих значений, сохраненных при последнем прогоне алгоритма (например, на прошлой неделе), и пройденного расстояния (расст(t)), то есть оценочных значений μсегодня-1, σсегодня-1 и расст(t) за прошлую неделю. В данном случае оценочные значения мю и сигма обновляют в зависимости от старых значений (за последний проход) и расстояния, пройденного в последний день.
На шаге 424 способ предусматривает обнуление пройденного расстояния для перезапуска счетчика расстояния в новый день. То есть контроллер может задать расст(t) равным 0. Предположим, что статистика вождения относится к определенному дню недели, например, воскресенью. Для обновления статистики (то есть значений сигма и мю для воскресенья) в воскресенье текущей недели, алгоритм может пойти одним из двух путей. В первом варианте контроллер может оценивать или обновлять значения в реальном времени (то есть постоянно) и сохранять результат при каждом сборе новых данных. В данном случае входными параметрами могут быть сигма(d, w-1), мю(d, w-1) и расст(d, t). Полученные результаты представляют собой: сигма(d, w) и мю(d, w). Во втором варианте контроллер может продолжить сбор данных о вождении в воскресенье и дождаться понедельника для обновления статистики вождения для воскресенья однократно (то есть за отдельные события) и сохранить новый результат. В данном случае входными параметрами могут быть сигма(d-1, w-1), мю(d-1, w-1) и расст(d, t). Полученные результаты представляют собой: сигма (d-1, w), и мю(d-1, w).
Таким образом, в основе алгоритма на ФИГ. 4 лежит статистическое определение исправности компонента в зависимости от времени. Заблаговременное прогнозирование в зависимости от скорости ухудшения характеристик в прошлом и выполнение линейной или нелинейной аппроксимации для оценки остаточного ресурса компонента обеспечивает более надежное решение для прогнозирования. Преобразование данных о времени, оставшемся до технического обслуживания, в данные о расстоянии с использованием статистики вождения позволяет передавать информацию водителю транспортного средства в более понятном формате, благодаря чему водитель транспортного средства может своевременно осуществить техническое обслуживание компонента и необязательно скорректировать свои особенности/привычки вождения.
На ФИГ. 5 раскрыт пример алгоритма 500 для точной оценки остаточного ресурса системного аккумулятора транспортного средства. На ФИГ. 6 представлен алгоритм на ФИГ. 5 в виде блок-схемы. Способ обеспечивает диагностику и прогнозирование степени исправности тягового аккумулятора. Способ предусматривает высокоуровневый подход, основанный на обучении, с возможностью применения для всех типов тяговых аккумуляторов, в том числе свинцово-кислотных и литиево-ионных. Параметры эквивалентной схемы определяют регулярно через заданные промежутки и принимают напрямую зависящими от температуры аккумулятора (Э) и степени заряженности (СЗ).
Степень исправности (СИ) аккумулятора можно выразить в процентах от остаточного ресурса, могущего составлять от 100% для новых аккумуляторов до 0% для отработанных аккумуляторов. По мере старения аккумулятора падает его СИ, растет его внутреннее сопротивление и падает его внутренняя емкость. В алгоритме прогнозирования на ФИГ. 5-6 применяют взвешенное представление СИ, учитывающее возрастания R и падения С согласно следующему выражению:
СИ=СИR * СИС
Внутренние R и С соотносят с контролируемыми оценочными R0, R1 и C1 и таким образом оценивают СИ. Диаграмма 700 на ФИГ. 7 изображает изменение внутреннего С аккумулятора во времени, а диаграмма 750 на ФИГ. 7 - изменение внутреннего R аккумулятора во времени (Авторы изобретения: просьба раскрыть подробнее).
Обратимся к способу 500 на ФИГ. 5: на шаге 502 способа оценивают и/или измеряют температурные параметры. В их число входят, например, температура окружающей среды, температура аккумулятора и т.п. На шаге 504 способ предусматривает нахождение статистики технического обслуживания аккумулятора для определения того, когда аккумулятор проходил последнее по времени техническое обслуживание. Последнее по времени техническое обслуживание аккумулятора может включать в себя замену, ремонт или восстановление аккумулятора. Например, может быть найден период или пройденное транспортным средством расстояние с последнего по времени технического обслуживания аккумулятора. Кроме того, могут быть найдены скорость ухудшения характеристик аккумулятора на момент последнего по времени технического обслуживания, а также характер/причина ухудшения характеристик на момент последнего по времени технического обслуживания. Например, можно определить, обусловлено ли ухудшение характеристик аккумулятора температурным воздействием (например, перегревом), старением, скоростью износа выше ожидаемой, или каким-либо событием/происшествием с транспортным средством и т.п.
На шаге 506 способ предусматривает измерение параметров аккумулятора в реальном времени. Например, можно выполнить оценку в реальном времени тока аккумулятора (I) и напряжения аккумулятора (V). Оцененные в реальном времени значения можно сравнить с опорными значениями параметров. Как подробно раскрыто в настоящем описании, контроллер может прогнозировать степень ухудшения характеристик компонента транспортного средства по определяемому показателю, выводимому из замеренного параметра работы транспортного средства, в том числе - из прошлой статистики определяемого показателя, с последующим преобразованием прогнозной степени ухудшения характеристик в оценочное значение оставшегося времени или периода для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем, в том числе - прошлой статистики определяемого показателя. В изображенном примере компонент представляет собой системный аккумулятор, определяемый показатель - сопротивление аккумулятора и/или емкость аккумулятора, а замеренный параметр работы транспортного средства включает в себя ток аккумулятора и/или напряжение аккумулятора. Измерение параметров аккумулятора в реальном времени включает в себя измерение во время работы транспортного средства, так как параметры работы транспортного средства и двигателя изменяются. Например, параметр работы транспортного средства можно замерять в переходных и установившихся режимах работы транспортного средства. Далее контроллер может присвоить параметру работы транспортного средства, замеренному в переходных режимах работы транспортного средства, вес, отличный (например, более высокий), от веса, который присваивают параметру работы транспортного средства, замеренному в установившихся режимах работы транспортного средства.
На шаге 508 способ предусматривает обновление термической модели аккумулятора в зависимости от измеренных температурных параметров. Например, параметры эквивалентной схемы могут быть нормированы по отношению к опорной температуре. В результате, можно уменьшить (в одном примере - устранить) долю эффекта изменения температуры в изменении параметров эквивалентной схемы при старении аккумулятора. Таким образом, опорные кривые на ФИГ. 7 становятся одномерными и перестают зависеть от температуры. На шаге 510 способ предусматривает использование обновленной термической модели для прогнозирования изменения сопротивления и емкости аккумулятора. Например, как видно из ФИГ. 7, можно ожидать изменения нормированных внутреннего сопротивления и емкости при изменении степени исправности аккумулятора.
На шаге 512 способ предусматривает прогнозирование степени заряженности аккумулятора (СЗ) в рамках рекурсивной оценки модели эквивалентной схемы. Например, прогнозная степень ухудшения характеристик аккумулятора может быть тем больше, чем выше сопротивление аккумулятора или чем ниже емкость аккумулятора. На шаге 514 способ предусматривает рекурсивную оценку степени исправности аккумулятора по прогнозным степени заряженности, сопротивлению и емкости аккумулятора. Например, по мере старения аккумулятора, ожидают роста его внутреннего сопротивления с одновременным уменьшением его емкости. Например, оценочная степень исправности аккумулятора может включать в себя оценочный выработанный ресурс в процентах. Например, если степень исправности составляет 60%, это указывает на то, что 60% ресурса аккумулятора было выработано, и для использования осталось только 40% ресурса аккумулятора.
Например, контроллер может оценить значение определяемого показателя (в данном случае - сопротивления и емкости аккумулятора) в зависимости от последнего по времени оценочного значения определяемого показателя, найденного из прошлой статистики определяемого показателя, и расстояния, пройденного транспортным средством с последней по времени оценки определяемого показателя. Кроме того, контроллер может оценить значение определяемого показателя в зависимости от исходного оценочного значения определяемого показателя, найденного из прошлой статистики определяемого показателя и определенного при установке компонента в транспортном средстве. Статистика вождения в прошлом и прогнозное вождение в будущем могут включать в себя степень агрессивности вождения, и/или интенсивность использования педалей, и/или частые варианты распределения продолжительности поездки, обычные варианты распределения вероятностей, и/или статистические профили в зависимости от маршрута, и/или профили параметров окружающей среды, при этом профили параметров окружающей среды включают в себя прошлые и прогнозные метеорологические явления на маршруте движения транспортного средства.
На шаге 516 способ предусматривает обновление степени исправности аккумулятора в зависимости от статистики вождения транспортного средства, включающей в себя особенности и привычки вождения водителя. Особенности и привычки вождения водителя могут включать в себя данные об особенностях и привычках вождения, найденные в данных статистики вождения в прошлом, а также данных о прогнозном вождении в будущем. В основе использования алгоритма для оценки степени исправности аккумулятора может лежать исходная фиксированная скорость ухудшения характеристик. При этом, как разъяснялось на примере ФИГ. 2, некоторые явления могут стать причиной роста или падения скорости ухудшения характеристик относительно фиксированной скорости. Некоторые из этих явлений могут происходить за пределами двигателя транспортного средства, например, метеорологические явления, в том числе - осадки (могущие повлиять на компонент за счет роста влажности окружающей среды). В число других явлений могут входить: особенности вождения водителем, насколько агрессивно водитель склонен водить, водит ли водитель размеренно или часто использует педали акселератора и тормоза, средняя скорость вождения транспортного средства, обычный режим вождения транспортного средства (например, режим тяги от двигателя или электрической тяги в гибридном транспортном средстве) и т.п. Кроме того, могут быть учтены такие особенности вождения в будущем (например, прогнозные), как рельеф местности, высота над уровнем моря и температура окружающей среды, прогнозные события нажатия педалей и уклоны/склоны, ожидаемые на выбранном маршруте вождения. Например, если водитель часто использует педали акселератора и тормоза (или ожидают, что он будет часто использовать их с учетом выбранного маршрута движения), разрядка аккумулятор может произойти быстрее. В качестве другого примера, если водитель водит агрессивно, нагрев аккумулятора, а также его износ из-за более высоких средних температур аккумулятора, могут происходить быстрее. В приведенном выше примере, если исходная оценочная степень исправности составляет 60%, в зависимости от статистики вождения степень исправности можно обновить до 68%, указав на то, что исходя из статистики вождения транспортного средства можно ожидать более быстрого ухудшения характеристик аккумулятора.
На шаге 518 способ предусматривает преобразование оценочной степени исправности в оценочный остаточный ресурс аккумулятора, при этом оценочный остаточный ресурс представляют в виде времени или расстояния, оставшегося до того, как нужно будет выполнить техническое обслуживание аккумулятора. В частности, контроллер может преобразовать прогнозную степень ухудшения характеристик в оценочное значение оставшегося времени или периода для отображения водителю транспортного средства, при этом преобразование осуществляют в зависимости от данных статистики вождения в прошлом и прогнозного вождения в будущем, в том числе - прошлой статистики определяемого показателя (в данном случае - прошлой статистики профиля сопротивления и емкости аккумулятора). Контроллер может использовать оценочную степень исправности и текущий оценочный пробег транспортного средства (например, по показанию одометра транспортного средства) для вычисления остаточного ресурса. Преобразование также можно осуществлять в зависимости от абсолютного расстояния, пройденного транспортным средством, найденного в данных статистики вождения в прошлом.
На шаге 520 контроллер может показать оценочное время/расстояние, оставшееся до ухудшения характеристик компонента, водителю транспортного средства, например, на дисплее центрального пульта транспортного средства. Например, может быть показано, что «аккумулятор нужно заменить через 120 миль». Так водитель может получить более понятную оценку того, когда нужно выполнить техническое обслуживание аккумулятора. Кроме того, показанная оценка может указывать водителю транспортного средства на то, что ему нужно скорректировать особенность его вождения, например, она может указывать водителю на необходимость менее агрессивного вождения. Кроме того, контроллер может преобразовать прогнозную степень ухудшения характеристик в оставшееся число дозаправок топливного бака для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем.
Таким образом, способ на ФИГ. 5 напрямую учитывает влияния температуры аккумулятора θ и СЗ на выявление степени исправности и строит трехмерные диаграммы (дискретных областей) параметров RC в зависимости от в и СЗ. Кроме того, представленная диаграмма дискретных областей допускает менее строгие ограничения по «материальности» и может быть соотнесена с различными временными шкалами системы.
Данная стратегия по существу представляет собой основанный на обучении подход, при котором параметры RC определяют «регулярно» в течение срока службы аккумулятора с получением оценочных значений СИ и времени. Рассмотрим модель Рендела n-ного порядка, представленную ниже (модель 1-го порядка содержала бы только один элемент R-C):

Параметры эквивалентной схемы оценивают «быстрым» путем в зависимости от температуры и СЗ. Возможны продолжения до моделей Рендела более высокого порядка. Полученные значения R0(T, СЗ), R1(T, СЗ) и C1(T, СЗ) отслеживают по мере старения аккумулятора с получением оценочного значения изменения остаточного срока годности и времени.
Применив законы Кирхгофа к модели эквивалентной схемы, получим:

Преобразовав вышеуказанные уравнения в пространство Лапласа, получим:

Соответствующую функцию преобразования определяют как:

При применении правила Тастина



Далее можно применить рекурсивный способ для минимизации несоответствия между прогнозным и измеренным напряжением следующим образом:

где εk - мера погрешности, λ - коэффициент пренебрежения, а γ - матрица усиления.
Таким образом, двусторонняя диаграмма обеспечивает возможность преобразования параметров эквивалентной схемы из дискретной в физическую область. Далее нужно установить ограничения по материальности, чтобы обеспечить R>0 и С>0. Обновленная формула является «приблизительной» в том смысле, что она устанавливает ограничения для величины обновления при каждой временной выборке.

Далее выявление в реальном времени выполняют «многократно» для разных условий ввода θ и СЗ. Затем строят трехмерную диаграмму для параметров эквивалентной схемы:
Исходные параметры (R0(0), R1(0) и С1(0) могут быть получены в результате оценки не в реальном времени. Характеристики при прокрутке двигателя и выявленные временные ограничения системы также можно использовать для инициализации алгоритма.

Далее из замкнутой формулы получают a1, b0 и b1, где k1, k2 и k3 - дискретные моменты времени, которые следует выбирать во время начальной фазы разрядки.
Таким образом, контроллер может прогнозировать степень ухудшения характеристик аккумулятора транспортного средства по изменению сопротивления и емкости аккумулятора относительно исходных значений, оцененных при установке в системе транспортного средства, за период пробега транспортного средства, а также в зависимости от расстояния, пройденного транспортным средством за этот период, при этом сопротивление и емкость аккумулятора выводят из замеренного тока или напряжения аккумулятора. Далее контроллер может преобразовать прогнозную степень ухудшения характеристик в оценочное значение времени или период, оставшийся до того, как нужно будет выполнить техническое обслуживание аккумулятора, для отображения водителю транспортного средства, при этом преобразование осуществляют в зависимости от данных статистики вождения в прошлом и прогнозного вождения в будущем. В данном случае, напряжению или току аккумулятора, замеренным во время работы транспортного средства в неустановившихся режимах, может быть присвоен вес, отличный от веса, присваиваемого напряжению или току аккумулятора, замеренным во время работы транспортного средства в установившихся режимах. Например, напряжению или току аккумулятора, замеренным во время работы транспортного средства в неустановившихся режимах, может быть присвоен больший вес, чем напряжению или току аккумулятора, замеренным во время работы транспортного средства в установившихся режимах.
На ФИГ. 6 раскрыт алгоритм способа на ФИГ. 5 в виде блок-схемы. Блок-схема 600 иллюстрирует взаимосвязь между различными компонентами оценки степени исправности (СИ) аккумулятора. Входными параметрами первого блока, а именно - «Идентификация аккумулятора», являются ток и напряжение. Данный компонент в процессе оценки в режиме реального времени обновляет параметры модели эквивалентной схемы, а именно -R0, R1 и С1, при соответствующих условиях ввода. Далее полученные значения нормируют по отношению к опорным значениям, соответствующим опорной температуре, используя блок «Термическая модель».
Прямая зависимость степени заряженности (СЗ) (или, аналогичным образом, глубины разрядки) обеспечена за счет оценки в реальном времени СЗ и напряжения при разомкнутой цепи Em посредством блоков «Зарядка и емкость» и «Вычисление Em». Результаты, полученные с помощью этих компонентов, вводят в блок «Эволюция параметра», обеспечивающий возможность регистрации изменения параметров модели эквивалентной схемы по мере старения аккумулятора. Данный тренд, вместе с входным параметром из блока «Статистика вождения», обеспечивает возможность выполнения прогнозирования и выдачи оценочного значения остаточного ресурса аккумулятора. Алгоритм также включает в себя модель уравнения цепи аккумулятора, позволяющую прогнозировать выходное напряжение аккумулятора для любого входного тока по оценочным значениям Em, R0, R1 и С1.
Таким образом, контроллер может прогнозировать степень ухудшения характеристик компонента транспортного средства в зависимости от изменения показателя, относящегося к этому компоненту транспортного средства, за некий период и расстояния, пройденного транспортным средством за этот период, при этом показатель выводят из замеренного параметра работы транспортного средства. Далее контроллер может преобразовать прогнозную степень ухудшения характеристик в оценочное значение оставшегося времени или периода для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем. Далее контроллер может показать оценочное значение оставшегося времени или периода водителю транспортного средства в виде числа событий дозаправки топливного бака, оставшихся до того, как нужно будет выполнить техническое обслуживание компонента транспортного средства. Статистика вождения в прошлом и прогнозное вождение в будущем могут включать в себя степень агрессивности вождения, и/или интенсивность использования педалей, и/или частые варианты распределения продолжительности поездки, обычные варианты распределения вероятностей, и/или статистические профили в зависимости от маршрута, и/или профили параметров окружающей среды, при этом профили параметров окружающей среды включают в себя прошлые и прогнозные метеорологические явления на маршруте движения транспортного средства. Преобразование может зависеть от пройденного расстояния и включает в себя преобразование с помощью коэффициента, зависящего от текущего показания одометра транспортного средства. Если компонент транспортного средства представляет собой системный аккумулятор, как в рассматриваемом случае, замеренный параметр работы транспортного средства включает в себя ток аккумулятора и напряжение аккумулятора. Если компонент транспортного средства представляет собой фильтр всасываемого воздуха двигателя, раскрытый на ФИГ. 8, замеренный параметр работы транспортного средства включает в себя поток воздуха в коллекторе или давление воздуха в коллекторе. Изменение показателя за период может включать в себя изменение от исходного значения показателя, оцененного при установке компонента транспортного средства. Прогнозирование может включать в себя повышение степени ухудшения характеристик компонента транспортного средства в сторону полностью неисправного состояния по мере возрастания разности текущего и исходного значения показателя сверх порога, при этом порог зависит от расстояния, пройденного транспортным средством за указанный период.
На ФИГ. 8 раскрыт пример способа 800 для оценки остаточного ресурса фильтра всасываемого воздуха двигателя в зависимости от измеренных значений поток воздуха в коллекторе и/или давления воздуха в коллекторе. Способ позволяет информировать водителя транспортного средства о времени или пробеге транспортного средства, оставшемся до того, как нужно будет выполнить техническое обслуживание/замену воздушного фильтра.
На шаге 802 способа оценивают и/или измеряют параметры двигателя. В их число могут входить, например, температурные параметры двигателя, например, температура двигателя, температура воздуха, температура окружающей среды и т.п. На шаге 804 способ предусматривает нахождение статистики технического обслуживания воздушного фильтра для определения того, когда воздушный фильтр проходил последнее по времени техническое обслуживание. Последнее по времени техническое обслуживание воздушного фильтра может включать в себя замену, ремонт или восстановление воздушного фильтра. Например, может быть найден период или пройденное транспортным средством расстояние с последнего по времени технического обслуживания воздушного фильтра. Кроме того, могут быть найдены скорость ухудшения характеристик воздушного фильтра на момент последнего по времени технического обслуживания, а также характер/причина ухудшения характеристик на момент последнего по времени технического обслуживания. Например, можно определить, обусловлено ли ухудшение характеристик воздушного фильтра старением, скоростью износа выше ожидаемой, плохим качеством воздуха или каким-либо событием/происшествием с транспортным средством и т.п.
На шаге 806 способ предусматривает измерение изменения потока воздуха в коллекторе (МРВ) и/или изменения давления в коллекторе (ДВК) при изменении положения дросселя во время работы транспортного средства, в том числе - во время работы транспортного средства в переходных и установившихся режимах. В частности, при изменении требуемого водителем крутящего момента, контроллер контролирует изменение заданного командой угла открытия дросселя и изменения измеренных МРВ или ДВК для оценки перепада давления, возникающего из-за возросшего загрязнения воздушного фильтра. В данном случае оцениваемый компонент транспортного средства представляет собой фильтр всасываемого воздуха двигателя, определяемый показатель, относящийся к фильтру, представляет собой среднее значение и/или значение среднеквадратического отклонения потока воздуха через фильтр, а замеренный параметр работы транспортного средства, по которому определяют данный показатель, включает в себя поток воздуха в коллекторе. Контроллер может присваивать потоку воздуха в коллекторе, замеренному при больших углах открытия впускного дросселя, больший вес, чем потоку воздуха в коллекторе, замеренному при меньших углах открытия дросселя. Или же контроллер может присвоить параметру работы транспортного средства, замеренному в переходных режимах работы транспортного средства, больший вес, чем параметру работы транспортного средства, замеренному во время работы транспортного средства в установившихся режимах. В некоторых примерах, в дополнение к МРВ или вместо него, замеряемый параметр работы транспортного средства может включать в себя давление воздуха в коллекторе относительно барометрического давления. На шаге 808 способ предусматривает получение подтверждения того, что было собрано достаточно данных при угле открытия дросселя больше порогового. То есть прогнозирование степени исправности можно осуществлять только после того, как будет собрано пороговое количество показаний потока воздуха, когда угол открытия впускного дросселя превышает пороговое значение. Например, может быть подтверждено, что было собрано достаточно данных при углах открытия дросселя величиной не менее 55 градусов. Присвоение большей весомости данным, собранным при больших углах открытия дросселя позволяет уменьшить влияние состояния дросселя на измерение МРВ или ДВК. Чем больше угол открытия дросселя, тем меньше воздействие, оказываемое дроссельной заслонкой на поток в качестве сужающего устройства. Ожидаемым эффектом возросшего загрязнения воздушного фильтра является уменьшение измеренного среднего значения МРВ или ДВК при больших углах открытия дросселя и уменьшение соответствующего среднеквадратического отклонения. По мере роста загрязнения воздушного фильтра, возникновение быстрых переходных режимов МРВ или ДВК на уровне воздушного фильтра становится более затрудненным. Следовательно, использование данных, собранных при относительно больших углах открытия дросселя при наличии переходных режимов позволяет лучше определять загрязнение фильтра. Кроме того, это снижает необходимость работы транспортного средства в установившемся режиме для оценки воздушного фильтра.
Если не было собрано достаточно данных, на шаге 810 способ продолжает сбор данных. Если было собрано достаточно данных, например, при относительно большом угле открытия дросселя было собрано количество данных, превышающее калибруемое количество, способ следует на шаг 812, где контроллер рекурсивно оценивает среднее значение (мю или μ) и значение среднеквадратического отклонения (сигма или σ) собранных показаний МРВ. Среднее значение представляет собой среднее значение потока воздуха через воздушный фильтр, а значение среднеквадратического отклонения представляет разброс собранных показаний потока воздуха.
На шаге 814 можно определить, ниже ли оценочное среднее значение, чем порог, и/или ниже ли оценочное значение среднеквадратического отклонения МРВ/ДВК при относительно больших углах открытия дросселя, чем порог. Или же оценочные среднее значение и значение среднеквадратического отклонения можно сравнить с ожидаемыми значениями. Ожидаемые значения показаний потока воздуха могут зависеть от пройденного транспортным средством расстояния, данных статистики вождения транспортного средства в прошлом, прогнозного вождения транспортного средства в будущем и исходного значения показаний потока воздуха на момент установки воздушного фильтра в транспортном средстве. В одном примере порог мю представляет собой значение, обозначающее максимальный поток воздуха или среднее значение абсолютного давления в коллекторе. Порог сигма также представляет собой значение, обозначающее то, насколько легко потоки в переходных режимах проходят через воздушный фильтр. Если среднее значение или значение среднеквадратического отклонения ниже соответствующего порога, на шаге 816 может быть указано, что имеет место ухудшение характеристик воздушного фильтра, и нужно выполнить его техническое обслуживание или замену. Таким образом, диагностику воздушного фильтра можно осуществлять по измеренному изменению мю и/или сигма.
Если оценочное среднее значение и/или оценочное значение среднеквадратического отклонения выше соответствующего порога, на шаге 818 способ предусматривает рекурсивную оценку степени исправности воздушного фильтра по изменению среднего значения и/или значения среднеквадратического отклонения. Например, контроллер может прогнозировать тем большую степень ухудшения характеристик (тем большее ухудшение характеристик фильтра), чем ниже среднее значение и/или значение среднеквадратического отклонения. Данное изменение может включать в себя изменение с последнего прогона алгоритма, изменение с последнего по времени технического обслуживания воздушного фильтра, или изменение со времени установки воздушного фильтра в транспортном средстве. Как раскрыто на примерах ФИГ. 10-12, по мере загрязнения фильтра среднее значение МРВ/ДВК, измеренных на фильтре, может начать падать. Кроме того, разброс данных может быть меньше, результатом чего является падение значения среднеквадратического отклонения. Например, оценочная степень исправности воздушного фильтра может включать в себя оценочный выработанный ресурс в процентах. Например, если степень исправности составляет 60%, это указывает на то, что 60% ресурса воздушного фильтра было выработано, и для использования осталось только 40% ресурса воздушного фильтра.
На ФИГ. 9 раскрыт пример влияния загрязнения фильтра на статистические параметры измеренного массового расхода воздуха. Диаграмма 900 описывает изменение МРВ при изменении угла открытия дросселя для свежего (полностью чистого или незагрязненного) воздушного фильтра на кривой 902 (сплошная линия), в том числе - среднее значение и среднеквадратическое отклонение 906 (сплошная линия). Диаграмма 900 также иллюстрирует изменение МРВ в зависимости от угла открытия дросселя для полностью загрязненного воздушного фильтра на кривой 904 (штриховая линия) в том числе - среднее значение и среднеквадратическое отклонение 908 (штриховая линия). В изображенном примере МРВ при относительно больших углах открытия дросселя, например, углах больше 91, варьируется в диапазоне от значения а (МРВ для свежего фильтра) и В (МРВ для загрязненного фильтра). Исходя из исправленных средних значений МРВ и значений среднеквадратического отклонения свежего фильтра по сравнению с загрязненным фильтром, исправность фильтра можно определить по уравнению:

Следует понимать, что в других примерах можно измерять ДВК, при этом ДВК при относительно больших углах открытия дросселя, например, углах больше 61, может варьироваться в диапазоне от значения а (ДВК для свежего фильтра) до В (ДВК для загрязненного фильтра). Исходя из исправленных средних значений МРВ и значений среднеквадратического отклонения свежего фильтра по сравнению с загрязненным фильтром, исправность фильтра можно определить по уравнению:

Для набора данных Xi, где i=1…N, и упорядоченных данных Xi={х1,х2, …xN},
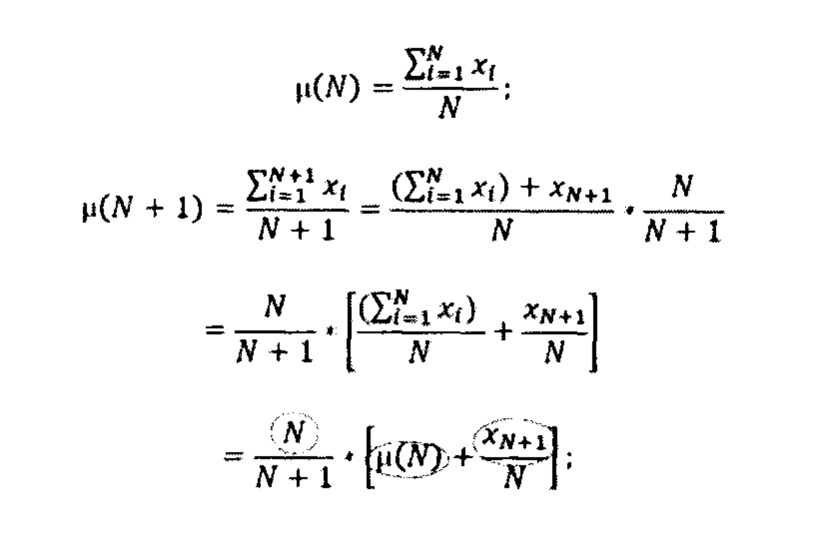
Для набора данных Xi, где i=1…N, и упорядоченных данных Xi={xi, х2, …xN}, приняв, что для большого N, μ(N+1) ~ μ(N); получим:

где:
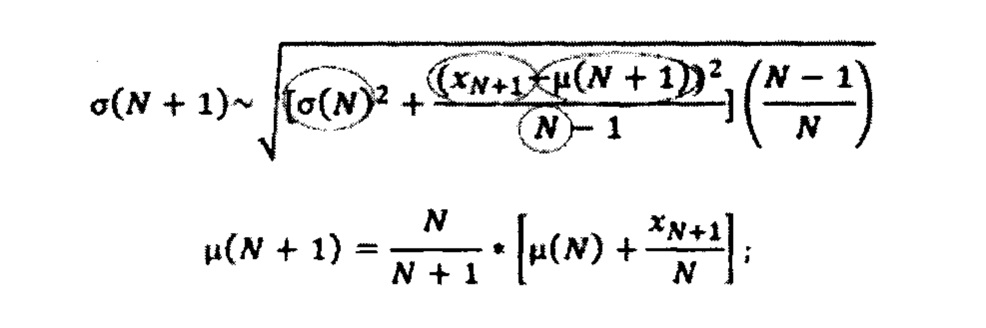
Вышеприведенные уравнения показывают, как пошагово выводят рекурсивную оценку мю и сигма из старых значений (значений, определенных в последнем проходе), новых оценочных значений (xN+1) и текущего счетчика данных (N).
На шаге 820 на ФИГ. 8 способ предусматривает обновление степени исправности воздушного фильтра в зависимости от статистики вождения транспортного средства, в том числе - от особенностей и привычек вождения водителя. В основе алгоритма для оценки степени исправности воздушного фильтра может лежать исходная фиксированная скорость ухудшения характеристик. При этом, как разъяснялось на примере ФИГ. 2, некоторые явления могут стать причиной роста или падения скорости ухудшения характеристик относительно фиксированной скорости. Некоторые из этих явлений могут происходить за пределами двигателя транспортного средства, например, метеорологические явления, в том числе - осадки (могущие повлиять на компонент за счет роста влажности окружающей среды). В число других явлений могут входить: особенности вождения водителем, насколько агрессивно водитель склонен водить, водит ли водитель размеренно или часто использует педали акселератора и тормоза, средняя скорость вождения транспортного средства, обычный режим вождения транспортного средства (например, режим тяги от двигателя или электрической тяги в гибридном транспортном средстве) и т.п. Например, если водитель часто использует педали акселератора и тормоза или водит агрессивно, изменения потока воздуха через фильтр могут происходить чаще, в связи с чем возрастает износ. В приведенном выше примере, если исходная оценочная степень исправности составляет 60%, в зависимости от статистики вождения степень исправности можно обновить до 68%, указав на то, что исходя из статистики вождения транспортного средства можно ожидать более быстрого ухудшения характеристик воздушного фильтра.
На шаге 822 способ предусматривает преобразование оценочной степени исправности в оценочный остаточный ресурс воздушного фильтра, при этом оценочный остаточный ресурс представляют в виде времени или расстояния, оставшегося до того, как нужно будет выполнить техническое обслуживание воздушного фильтра. Контроллер может использовать оценочную степень исправности и текущий оценочный пробег транспортного средства (например, по показанию одометра транспортного средства) для вычисления остаточного ресурса. Преобразование можно осуществлять в зависимости от данных статистики вождения транспортного средства в прошлом, в том числе - прошлой статистики разброса показаний потока воздуха, и прогнозного вождения транспортного средства в будущем. Преобразование также можно осуществлять в зависимости от пройденного транспортным средством расстояния, оцененного посредством одометра, и наличия выбранных метеорологических явлений.
На шаге 824 контроллер может показать оценочное время/расстояние, оставшееся до ухудшения характеристик компонента, водителю транспортного средства, например, на дисплее центрального пульта транспортного средства. Например, может быть показано, что «воздушный фильтр нужно заменить через 120 миль». Так водитель может получить более понятную оценку того, когда нужно выполнить техническое обслуживание воздушного фильтра. Контроллер также может показать оценочное значение оставшегося времени или периода водителю транспортного средства в виде числа событий дозаправки топливного бака, оставшихся до того, как нужно будет выполнить техническое обслуживание воздушного фильтра. Кроме того, показанная оценка может указывать водителю транспортного средства на то, что ему нужно скорректировать особенность своего вождения, например, она может указывать водителю на необходимость менее агрессивного вождения.
Например, контроллер может указать наличие состояния ухудшения характеристик фильтра всасываемого воздуха двигателя на основании того, что разброс показаний потока воздуха меньше ожидаемого, когда угол открытия дросселя больше верхнего порогового значения. Указание также может быть основано на том, что среднее значение показаний потока воздуха при угле открытия дросселя выше верхнего порогового значения ниже ожидаемого. Контроллер может прогнозировать состояние ухудшения характеристик воздушного фильтра на основании того, что разброс показаний потока воздуха меньше ожидаемого, и преобразовывать прогнозное состояние ухудшения характеристик в оценочное значение времени или период, оставшийся до того, как нужно будет выполнить техническое обслуживание воздушного фильтра, для отображения водителю транспортного средства. Преобразования можно осуществлять в зависимости от данных статистики вождения транспортного средства в прошлом, в том числе - прошлой статистики разброса показаний потока воздуха, и прогнозного вождения транспортного средства в будущем. Преобразование также можно осуществлять в зависимости от пройденного транспортным средством расстояния, оцененного посредством одометра, и наличия выбранных метеорологических явлений (например, снежных бурь, пыльных бурь и различных форм осадков, например, снега и дождя).
Таким образом, способ на ФИГ. 8 обеспечивают оценку остаточного процентного ресурса воздушного фильтра исключительно в зависимости от заданного командой угла открытия дросселя и измеренного массового расхода воздуха. Как следствие, способ может обеспечить точную оценку без необходимости наличия значительных ресурсов памяти или процессора для оценки исправности воздушного фильтра.
Примеры данных, иллюстрирующих тренды мю и сигма при загрязнении воздушного фильтра, раскрыты на ФИГ. 10-11. Диаграмма 1000 на ФИГ. 10 иллюстрирует показания МРВ, собранные при разных заданных командой углах открытия дросселя для свежего фильтра (точки измерения на более тонкой линии) и загрязненного на 60% фильтра (точки измерения на более толстой линии). При относительно больших углах открытия дросселя, например, свыше 55 градусов, среднее значение МРВ ниже для загрязненного фильтра. Кроме того, среднеквадратическое отклонение или разброс значений МРВ ниже для загрязненного фильтра. В частности, большее число измеренных значений МРВ расположены скученно при относительно больших углах открытия дросселя, при этом, если фильтр является чистым, для тех же углов открытия дросселя имеет место значительно больший разброс измеренных значений МРВ.
На диаграмме 1100 на ФИГ. 11 представлен более приближенный (увеличенный) вид данных на ФИГ. 10 при углах открытия дросселя свыше 60 градусов. Учет только относительно больших углов открытия дросселя позволяет уменьшить влияние других препятствий (например, загрязнения дросселя) на оценку. Представлены статистические параметры данных для свежего фильтра, в том числе - среднее значение (σ1) на сплошной линии 1152 и среднеквадратическое отклонение (μ1) на сплошной стрелке 1154. Также представлены статистические параметры данных для загрязненного на 60% фильтра, в том числе - среднее значение (μ2) на штриховой линии 1156 и среднеквадратическое отклонение (σ2) на штриховой стрелке 1158. При относительно больших углах открытия дросселя среднее значение МРВ ниже для загрязненного фильтра. Кроме того, среднеквадратическое отклонение или разброс значений МРВ ниже для загрязненного фильтра. В частности, большее число измеренных значений МРВ расположены скученно при относительно больших углах открытия дросселя, при этом, если фильтр является чистым, для тех же углов открытия дросселя имеет место значительно больший разброс измеренных значений МРВ. Таким образом, контроль изменения статистических параметров для измеренного МРВ при относительно больших углах открытия дросселя позволяет прогнозировать изменение состояния фильтра всасываемого воздуха.
Таким образом, контроллер может прогнозировать степень ухудшения характеристик фильтра всасываемого воздуха двигателя по результату сравнения измеренных показаний потока воздуха в коллекторе относительно заданных командой углов открытия дросселя во время работы транспортного средства после того, как будет собрано пороговое количество показаний потока воздуха при угле открытия дросселя больше порогового; а затем преобразовывать прогнозную степень ухудшения характеристик в оценочное значение оставшегося времени или периода для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем. Показания потока воздуха в коллекторе могут быть собраны во время работы в установившихся и переходных режимах работы двигателя посредством датчика потока воздуха, установленного ниже по потоку от впускного дросселя, при этом измеренным показаниям потока воздуха в коллекторе, собранным в переходных режимах работы двигателя, может быть присвоен больший вес, чем измеренным показаниям потока воздуха в коллекторе, собранным во время работы двигателя в установившихся режимах работы двигателя. Прогнозирование по результату сравнения может включать в себя выведение значения среднеквадратического отклонения и среднего значения потока воздуха в коллекторе из измеренных показаний потока воздуха; и повышение прогнозной степени ухудшения характеристик по мере падения значения среднеквадратического отклонения и/или среднего значения ниже соответствующих ожидаемых значений. Выведение может включать в себя присвоение показанию потока воздуха в коллекторе, измеренному при угле открытия дросселя больше порогового, большего веса, чем показанию потока воздуха, измеренному при угле открытия дросселя меньше порогового. В данном случае соответствующие ожидаемые значения зависят от исходного значения среднеквадратического отклонения и исходного среднего значения, оцененных при установке воздушного фильтра в транспортном средстве, а также от расстояния, пройденного транспортным средством с момента установки воздушного фильтра в транспортном средстве. Или же соответствующие ожидаемые значения зависят от данных статистики вождения в прошлом, в том числе - прошлой статистики ухудшения характеристик воздушного фильтра, при этом соответствующие ожидаемые значения включают в себя последнее по времени значение среднеквадратического отклонения и последнее по времени среднее значение потока воздуха в коллекторе, оцененные при непосредственно предшествующем прогоне алгоритма прогнозирования. Данные на ФИГ. 10-11 также графически представлены на диаграммах 1200 и 1250 на ФИГ. 12. Как видно из диаграммы 1200, среднее значение МРВ возрастает до абсолютного значения для свежего фильтра, которое больше, чем для загрязненного фильтра. Таким образом, контроль изменения среднего значения измеренного МРВ позволяет оценить степень загрязнения фильтра и скорость загрязнения фильтра за период или расстояние работы транспортного средства. По ним, в свою очередь, можно прогнозировать время, оставшееся до того, как загрязнение фильтра составит 100%. Как видно из диаграммы 1250, значение среднеквадратического отклонения МРВ возрастает на большую величину для свежего фильтра, чем для загрязненного фильтра. Таким образом, контроль изменения значения среднеквадратического отклонения измеренного МРВ позволяет оценить изменение степени загрязнения фильтра и скорости загрязнения фильтра за период или расстояние работы транспортного средства. По ним, в свою очередь, можно прогнозировать время, оставшееся до того, как загрязнение фильтра составит 100%.
Несмотря на то, что вышеприведенные примеры иллюстрируют соотнесение изменения статистических параметров измеренного МРВ с загрязнением воздушного фильтра, следует понимать, что изменение статистических параметров измеренного ДВК также можно соотнести с загрязнением воздушного фильтра. При относительно больших углах открытия дросселя, влияние других препятствий (например, загрязнения дросселя) на оценку воздушного фильтра при отдельно взятом давлении всасываемого воздуха меньше. Если воздушный фильтр оценивают по оценочному ДВК, измеренное ДВК можно сравнить с барометрическим давлением (БД). Для уменьшения влияния изменения БД на оценочные измеренные значения ДВК можно выбрать опорное значение БД. Разность текущего значения и опорного значения БД вычитают из среднего значения измеренного ДВК.
Таким образом, предложено решение, основанное на прогнозировании, для оценки остаточного срока годности компонента транспортного средства. Данное прогнозное решение можно применять в дополнение к любой имеющейся функции прогнозирования, предусматривающей, в первую очередь, приблизительное определение остаточного ресурса компонента в виде доли (или процентной доли) путем оценки времени и/или расстояния, оставшегося до того, как произойдет ухудшение характеристик компонента. Статистическое определение исправности компонента в зависимости от времени и пройденного расстояния позволяет точнее определять остаточный ресурс компонента и указывать его водителю транспортного средства в виде более понятного показателя.
Один пример способа для транспортного средства содержит шаги, на которых: прогнозируют степень ухудшения характеристик компонента транспортного средства по определяемому показателю, выводимому из замеренного параметра работы транспортного средства, в том числе - из прошлой статистики определяемого показателя; и преобразуют прогнозную степень ухудшения характеристик в оценочное значение оставшегося времени или периода для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем, в том числе - прошлой статистики определяемого показателя. В предыдущем примере, дополнительно или необязательно, компонент транспортного средства представляет собой системный аккумулятор, определяемый показатель - сопротивление аккумулятора и/или емкость аккумулятора, а замеренный параметр работы транспортного средства включает в себя ток аккумулятора и/или напряжение аккумулятора. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, прогнозирование включает в себя прогнозирование тем большей степени ухудшения характеристик, чем больше возрастает сопротивление аккумулятора или чем больше падает емкость аккумулятора. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, компонент транспортного средства представляет собой фильтр всасываемого воздуха двигателя, определяемый показатель - среднее значение и/или значение среднеквадратического отклонения потока воздуха через фильтр, а замеренный параметр работы транспортного средства включает в себя поток воздуха в коллекторе. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ дополнительно содержит шаг, на котором присваивают потоку воздуха в коллекторе, замеренному при относительно больших углах открытия впускного дросселя, больший вес, чем потоку воздуха в коллекторе, замеренному при относительно небольших углах открытия дросселя. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, замеренный параметр работы транспортного средства также включает в себя давление воздуха в коллекторе относительно барометрического давления. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, прогнозирование включает в себя прогнозирование тем большей степени ухудшения характеристик, чем меньше среднее значение и/или значение среднеквадратического отклонения. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, замеренный параметр работы транспортного средства замеряют во время работы транспортного средства в переходных и установившихся режимах, при этом способ также содержит шаг, на котором присваивают параметру работы транспортного средства, замеренному в переходных режимах работы транспортного средства, больший вес, чем параметру работы транспортного средства, замеренному во время работы транспортного средства в установившихся режимах. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ также содержит шаг, на котором оценивают значение определяемого показателя в зависимости от последнего по времени оценочного значения определяемого показателя, найденного из прошлой статистики определяемого показателя, и расстояния, пройденного транспортным средством с последней по времени оценки определяемого показателя. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ также содержит шаг, на котором оценивают значение определяемого показателя в зависимости от исходного оценочного значения определяемого показателя при установке компонента в транспортном средстве, найденного из прошлой статистики определяемого показателя. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, преобразование также осуществляют в зависимости от абсолютного расстояния, пройденного транспортным средством, найденного из данных статистики вождения в прошлом. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ также содержит шаг, на котором преобразуют прогнозную степень ухудшения характеристик в оставшееся число дозаправок топливного бака для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем.
Другой пример способа для транспортного средства содержит шаги, на которых: прогнозируют степень ухудшения характеристик компонента транспортного средства в зависимости от изменения показателя, относящегося к этому компоненту транспортного средства, за некий период и расстояния, пройденного транспортным средством за этот период, при этом показатель выводят из замеренного параметра работы транспортного средства; и преобразуют прогнозную степень ухудшения характеристик в оценочное значение оставшегося времени или периода для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем. В предыдущем примере, дополнительно или необязательно, способ также содержит шаг, на котором отображают оценочное значение оставшегося времени или периода водителю транспортного средства в виде числа событий дозаправки топливного бака, оставшихся до того, как нужно будет выполнить техническое обслуживание компонента транспортного средства. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, статистика вождения в прошлом и прогнозное вождение в будущем включает в себя степень агрессивности вождения, и/или интенсивность использования педалей, и/или частые варианты распределения продолжительности поездки, обычные варианты распределения вероятностей, и/или статистические профили в зависимости от маршрута, и/или профили параметров окружающей среды, при этом профили параметров окружающей среды включают в себя прошлые и прогнозные метеорологические явления на маршруте движения транспортного средства. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, преобразование в зависимости от пройденного расстояния включает в себя преобразование с помощью коэффициента, зависящего от текущего показания одометра транспортного средства. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, компонент транспортного средства представляет собой системный аккумулятор, замеренный параметр работы транспортного средства включает в себя ток аккумулятора и напряжение аккумулятора, причем, если компонент транспортного средства представляет собой фильтр всасываемого воздуха двигателя, замеренный параметр работы транспортного средства включает в себя поток воздуха в коллекторе или давление воздуха в коллекторе. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, изменение показателя за период включает в себя изменение от исходного значения показателя, оцененного при установке компонента транспортного средства, причем прогнозирование включает в себя повышение степени ухудшения характеристик компонента транспортного средства в сторону полностью неисправного состояния по мере возрастания разности текущего и исходного значения показателя сверх порога, при этом порог зависит от расстояния, пройденного транспортным средством за указанный период.
Другой пример способа для системы транспортного средства содержит шаги, на которых: прогнозируют степень ухудшения характеристик аккумулятора транспортного средства по изменению сопротивления и емкости аккумулятора относительно исходных значений, оцененных при установке в системе транспортного средства, за период пробега транспортного средства, а также в зависимости от расстояния, пройденного транспортным средством за этот период, при этом сопротивление и емкость аккумулятора выводят из замеренного тока или напряжения аккумулятора; и преобразуют прогнозную степень ухудшения характеристик в оценочное значение времени или период, оставшийся до того, как нужно будет выполнить техническое обслуживание аккумулятора, для отображения водителю транспортного средства, при этом преобразование осуществляют в зависимости от данных статистики вождения в прошлом и прогнозного вождения в будущем. В предыдущем примере, дополнительно или необязательно, напряжению или току аккумулятора, замеренным во время работы транспортного средства в неустановившихся режимах, присваивают вес, отличный от веса, присваиваемого напряжению или току аккумулятора, замеренным во время работы транспортного средства в установившихся режимах.
Еще один пример способа для транспортного средства содержит шаги, на которых: указывают наличие состояния ухудшения характеристик фильтра всасываемого воздуха двигателя на основании того, что разброс показаний потока воздуха меньше ожидаемого, когда угол открытия дросселя больше верхнего порогового значения. В предыдущем примере, дополнительно или необязательно, указание также осуществляют на основании того, что среднее значение показаний потока воздуха ниже ожидаемого, когда угол открытия дросселя больше верхнего порогового значения. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, указание включает в себя: прогнозирование состояния ухудшения характеристик воздушного фильтра на основании того, что разброс показаний потока воздуха меньше ожидаемого; и преобразование прогнозного состояния ухудшения характеристик в оценочное значение времени или период, оставшийся до того, как нужно будет выполнить техническое обслуживание воздушного фильтра, для отображения водителю транспортного средства. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, преобразование осуществляют в зависимости от данных статистики вождения транспортного средства в прошлом, в том числе - прошлой статистики разброса показаний потока воздуха, и прогнозного вождения транспортного средства в будущем. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, преобразование также осуществляют в зависимости от пройденного транспортным средством расстояния, оцененного посредством одометра, и наличия выбранных метеорологических явлений. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, прогнозирование происходит после того, как будет собрано пороговое количество данных при угле открытия впускного дросселя больше порогового значения. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ также содержит шаг, на котором отображают оценочное значение оставшегося времени или периода водителю транспортного средства в виде числа событий дозаправки топливного бака, оставшихся до того, как нужно будет выполнить техническое обслуживание воздушного фильтра. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, ожидаемый разброс показаний потока воздуха зависит от пройденного транспортным средством расстояния, данных статистики вождения транспортного средства в прошлом, прогнозного вождения транспортного средства в будущем и исходного разброса показаний потока воздуха на момент установки воздушного фильтра в транспортном средстве. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, ожидаемое среднее значение показаний потока воздуха зависит от пройденного транспортным средством расстояния, данных статистики вождения транспортного средства в прошлом, прогнозного вождения транспортного средства в будущем и исходного среднего значения показаний потока воздуха на момент установки воздушного фильтра в транспортном средстве.
Другой пример способа для транспортного средства содержит шаги, на которых: прогнозируют степень ухудшения характеристик фильтра всасываемого воздуха двигателя по результату сравнения измеренных показаний потока воздуха в коллекторе относительно заданных командой углов открытия дросселя во время работы транспортного средства после того, как будет собрано пороговое количество показаний потока воздуха при угле открытия дросселя больше порогового; и преобразуют прогнозную степень ухудшения характеристик в оценочное значение оставшегося времени или периода для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем. В предыдущем примере, дополнительно или необязательно, показания потока воздуха в коллекторе собирают во время работы в установившихся и переходных режимах работы двигателя посредством датчика потока воздуха, установленного ниже по потоку от впускного дросселя, причем измеренным показаниям потока воздуха в коллекторе, собранным в переходных режимах работы двигателя, присваивают больший вес, чем измеренным показаниям потока воздуха в коллекторе, собранным во время работы двигателя в установившихся режимах работы двигателя. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, прогнозирование по результату сравнения включает в себя: выведение значения среднеквадратического отклонения и среднего значения потока воздуха в коллекторе из измеренных показаний потока воздуха; и повышение прогнозной степени ухудшения характеристик по мере падения значения среднеквадратического отклонения и/или среднего значения ниже соответствующих ожидаемых значений. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, выведение включает в себя присвоение показанию потока воздуха в коллекторе, измеренному при угле открытия дросселя больше порогового, большего веса, чем показанию потока воздуха, измеренному при угле открытия дросселя меньше порогового. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, выведение включает в себя присвоение потоку воздуха в коллекторе, измеренному при углах открытия дросселя больше порогового, большего веса, чем потоку воздуха в коллекторе, измеренному при углах открытия дросселя меньше порогового. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, соответствующие ожидаемые значения зависят от исходного значения среднеквадратического отклонения и исходного среднего значения, оцененных при установке воздушного фильтра в транспортном средстве, а также от расстояния, пройденного транспортным средством с момента установки воздушного фильтра в транспортном средстве. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ также включает в себя то, что соответствующие ожидаемые значения зависят от данных статистики вождения в прошлом, в том числе - от прошлой статистики ухудшения характеристик воздушного фильтра, причем соответствующие ожидаемые значения включают в себя последнее по времени значение среднеквадратического отклонения и последнее по времени среднее значение потока воздуха в коллекторе, оцененные при непосредственно предшествующем прогоне алгоритма прогнозирования.
Пример системы транспортного средства содержит: двигатель, содержащий заборный канал; воздушный фильтр, соединенный с заборным каналом; впускной дроссель; датчик потока воздуха в коллекторе, установленный ниже по потоку от впускного дросселя; и контроллер. Контроллер выполнен с машиночитаемыми инструкциями в долговременной памяти для: сохранения измеренных показаний потока воздуха, когда заданный командой угол открытия впускного дросселя превышает пороговый; оценки показателя, отражающего разброс значений потока воздуха в коллекторе, по сохраненным измеренным показаниям потока воздуха; и прогнозирование степени ухудшения характеристик воздушного фильтра по соотношению оцененного показателя и порога; и преобразования прогнозной степени ухудшения характеристик в оценочное значение оставшегося времени или периода для отображения водителю транспортного средства на основе данных статистики вождения в прошлом и прогнозного вождения в будущем, в том числе -прошлой статистики оцененного показателя. В предыдущем примере, прогнозирование включает в себя прогнозирование большей степени ухудшения характеристик при падении оцененного показателя ниже порога. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, показатель представляет собой первый показатель, при этом контроллер содержит дополнительные инструкции для оценки второго показателя, отражающего средний поток воздуха в коллекторе через воздушный фильтр, причем прогнозирование включает в себя прогнозирование большей степени ухудшения характеристик при падении второго показателя ниже порога. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, порог определяют в зависимости от последнего по времени оценочного значения показателя, извлеченной из прошлой статистики оцененного показателя, и расстояния, пройденного транспортным средством с последней по времени оценки оцениваемого показателя. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, порог определяют в зависимости от исходного оценочного значения показателя на момент установки воздушного фильтра, извлеченного из прошлой статистики оцененного показателя, и расстояния, пройденного транспортным средством с момента установки воздушного фильтра.
В еще одном варианте способ может содержать шаги, на которых сравнивают статистически определяемый показатель замеренного параметра работы транспортного средства с исходным статистическим показателем замеренного параметра работы транспортного средства, замеренным при установке компонента транспортного средства, и повышают прогнозную степень ухудшения характеристик по мере падения текущего статистического показателя относительно исходного статистического показателя. В другом варианте прогнозирование состояния ухудшения характеристик воздушного фильтра может включать в себя нахождение первого среднего значения и первого значения среднеквадратического отклонения потока воздуха, замеренного при установке компонента в транспортном средстве; сравнение первого среднего значения со вторым средним значением потока воздуха, замеренного в текущее время; сравнение первого значения среднеквадратического отклонения со вторым значением среднеквадратического отклонения потока воздуха, замеренного в текущее время; и повышение прогнозной степени ухудшения характеристик воздушного фильтра в сторону полностью неисправного состояния по мере падения второго среднего значения ниже первого среднего значения или падения второго значения среднеквадратического отклонения ниже первого значения среднеквадратического отклонения. В предыдущем примере, дополнительно или необязательно, способ может также содержать шаг, на котором, если второе среднее значение или второе значение среднеквадратического отклонения упадет ниже порога, указывают, что воздушный фильтр полностью неисправен, и его нужно заменить. В предыдущем примере, дополнительно или необязательно, поток воздуха в коллекторе замеряют во временя работы транспортного средства в установившихся и переходных режимах, при этом прогнозирование включает в себя присвоение параметру работы транспортного средства, замеренному во время работы транспортное средства в переходных режимах, большего веса, чем параметру работы транспортного средства, замеренному во время работы транспортного средства в установившихся режимах.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут осуществляться системой управления, содержащей контроллер, в сочетании с различными датчиками, исполнительными механизмами и другим аппаратным обеспечением двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки необязательно требуется для достижения отличительных признаков и преимуществ раскрытых в настоящей заявке вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически представлять код, запрограммированный в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, при этом раскрытые действия выполняют путем исполнения инструкций в системе, содержащей разнообразные аппаратные компоненты двигателя в сочетании с электронным контроллером.
Следует понимать, что раскрытые в настоящей заявке конфигурации и алгоритмы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Объект настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая наличие двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема первоначальной формулы изобретения, также считаются включенными в объект настоящего изобретения.
Реферат
Изобретение относится к способу прогнозирования остаточного ресурса фильтра транспортного средства. Способ прогнозирования остаточного ресурса фильтра транспортного средства, в котором принимают в контроллере транспортного средства сигнал от одного датчика, присутствующего в транспортном средстве и с помощью указанного контроллера формируют указание о наличии состояния ухудшения характеристик фильтра всасываемого воздуха двигателя транспортного средства на основании того, что разброс показаний потока воздуха относительно указанного сигнала меньше ожидаемого, когда угол открытия дросселя транспортного средства больше верхнего порогового значения. Способ прогнозирования остаточного ресурса фильтра транспортного средства, в котором управляют датчиком потока воздуха для измерения показаний потока воздуха в коллекторе. С помощью контроллера сравнивают измеренные показания потока воздуха в коллекторе, прогнозируют степень ухудшения характеристик фильтра всасываемого воздуха двигателя по результату сравнения измеренных показаний потока воздуха в коллекторе относительно заданных командой углов открытия дросселя во время работы транспортного средства после того, как будет собрано пороговое количество показаний потока воздуха при угле открытия дросселя больше порогового. Достигается своевременное определение ухудшений характеристик воздушного фильтра. 3 н. и 17 з.п. ф-лы, 12 ил.
Комментарии