Устройство съемки изображения - RU2474850C1
Код документа: RU2474850C1
Чертежи























Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству съемки изображения, в котором возможно AF (АФ, автофокусирование) на основе разности фаз в плоскости считывания изображения.
Уровень техники
Одно из свойств цифровых камер представляет собой возможность записи даты и времени съемки, установочных значений камеры, таких как величина управления экспозицией, и различной информации о фотографировании, такой как информация об объективе, вместе с данными изображения в файле снятого изображения.
Например, была предложена цифровая камера, в которой записывают точку детектирования фокуса, используемую при управлении фокусированием объектива для фотографирования, и когда файл изображения воспроизводят, положение точки детектирования фокуса отображают с наложением на изображение (см. выложенный японский патент № 2001-128044).
Кроме того, было предложено устройство съемки изображения, в котором возможно записывать множество выбранных точек детектирования фокуса и данные детектирования фокуса (например, информацию расстояния, обозначающую расстояние от плоскости считывания изображения до объекта) в таких точках детектирования фокуса (см. выложенный японский патент № 2005-12307).
Информация, обозначающая такие точки детектирования фокуса и данные детектирования фокуса, используется в различных приложениях, таких как определение, был ли снят объект так, как предполагалось пользователем, при манипуляциях с изображением, уравнением изображения и поиске.
Однако в решении, представленном в выложенном японском патенте № 2001-128044, имеется проблема, состоящая в том, что известна только точка детектирования фокуса, которая использовалась при управлении фокусированием, и данные детектирования фокуса не известны.
Кроме того, в выложенной заявке на японский патент № 2005-12307 данные детектирования фокуса, которые были записаны в записанном файле изображения, представляют собой данные, непосредственно предшествующие фактической съемке изображения, и хотя это не представляет проблему в случае неподвижного объекта, если объект движется, данные детектирования фокуса и изображение не полностью соответствуют из-за временной задержки от момента, когда будет выполнено детектирование фокуса, до момента съемки изображения; соответственно, существует проблема, состоящая в том, что трудно использовать данные детектирования фокуса.
Сущность изобретения
Настоящее изобретение было выполнено с учетом описанных выше вопросов, и в соответствии с настоящим изобретением точка детектирования фокуса и данные детектирования фокуса, которые были сняты в момент, в который была произведена съемка изображения, записывают в файле изображения, и такие данные могут использоваться пользователем.
Устройство съемки изображения в соответствии с настоящим изобретением включает в себя: датчик изображения, имеющий первую группу пикселей, которая выполняет фотоэлектрическое преобразование изображения объекта из первой области выходного зрачка, которая представляет собой часть общей области выходного зрачка фотообъектива, вторую группу пикселей, которая выполняет фотоэлектрическое преобразование изображения объекта из второй области выходного зрачка, которая отличается от первой области выходного зрачка, и третью группу пикселей, предназначенную для съемки, в которой происходит фотоэлектрическое преобразование изображения объекта из области выходного зрачка, которая включает в себя первую область выходного зрачка и вторую область выходного зрачка; модуль детектирования фокуса, который детектирует информацию фокуса фотообъектива путем выполнения расчета дефокусирования, используя первый сигнал изображения, полученный из первой группы пикселей, и второй сигнал изображения, полученный из второй группы пикселей; модуль обработки изображения, который преобразует данные снятого изображения, для которых было выполнено фотоэлектрическое преобразование с помощью, по меньшей мере, третьей группы пикселей датчика изображения и захват в файл изображения для записи и сохранения; и модуль записи данных, который записывает, в ассоциации с файлом изображения, сигналы, полученные из первой группы пикселей и второй группы пикселей, таким образом, что может быть выполнен расчет дефокусирования.
Другие свойства настоящего изобретения будут понятны из следующего описания примерных вариантов осуществления со ссылкой на приложенные чертежи.
Краткое описание чертежей
На фиг.1 показан вид в поперечном сечении цифровой камеры в соответствии с Вариантом 1 осуществления во время наблюдения через видоискатель.
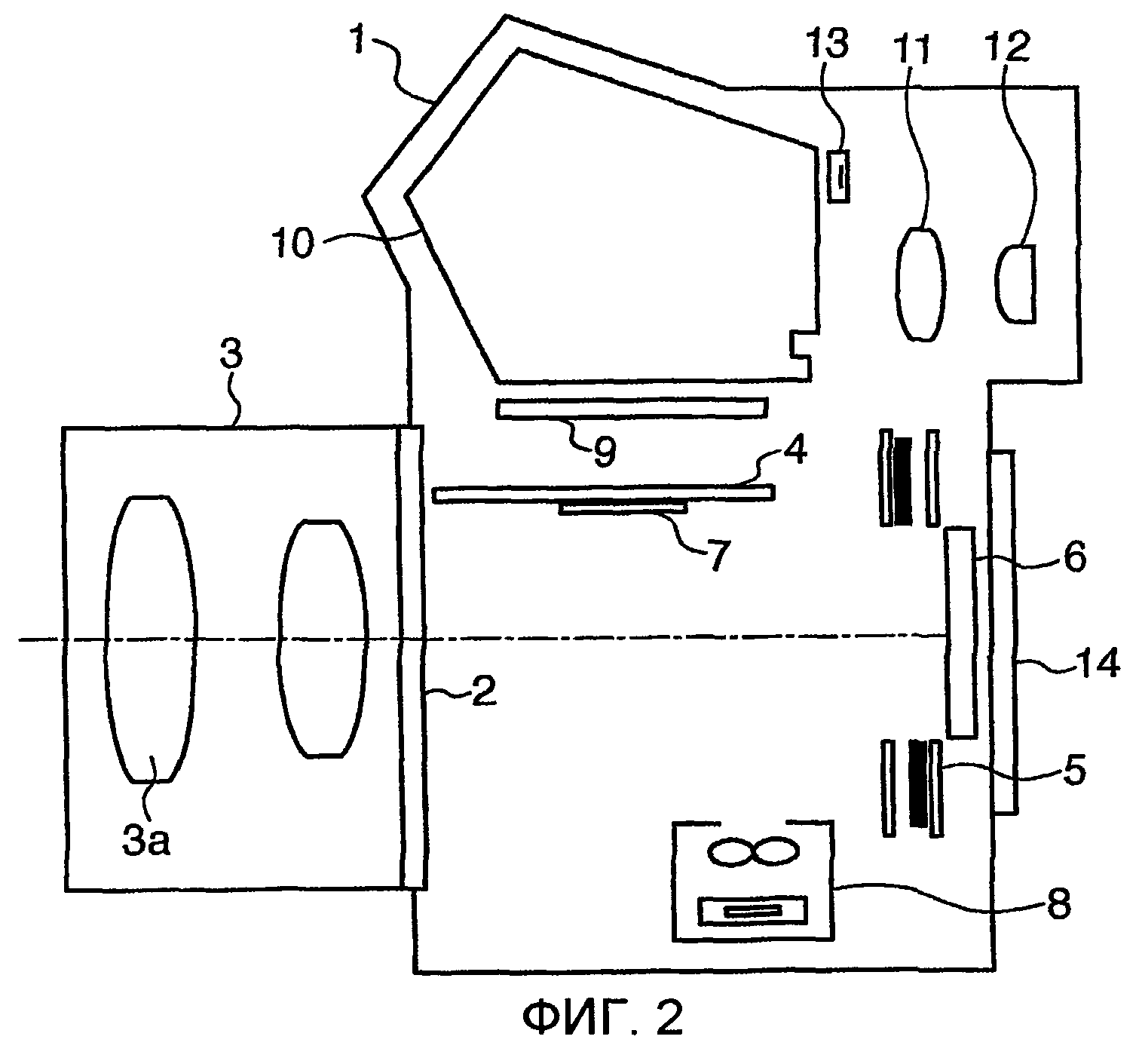
На фиг.2 показан вид в поперечном сечении цифровой камеры в соответствии с Вариантом 1 осуществления во время предварительного просмотра и съемки.
На фиг.3 показана блок-схема, представляющая систему управления цифровой камерой, показанной на фиг.1.
На фиг.4A и 4B показаны схемы, предназначенные для описания структуры пикселей съемки, которые используются в датчике изображения, показанном на фиг. 1.
На фиг.5A и 5B показаны схемы для описания структуры пикселей детектирования фокуса, которые используются в датчике изображения, показанном на фиг.1.
На фиг.6A и 6B показаны схемы для описания структуры других пикселей детектирования фокуса, которые используются в датчике изображения, показанном на фиг.1.
На фиг.7 показана схема, иллюстрирующая массив пикселей наименьшего модуля датчика изображения, показанного на фиг.1.
На фиг.8 показана схема, иллюстрирующая массив пикселей модуля наивысшего порядка датчика изображения, показанного на фиг.1.
На фиг.9 показана схема, иллюстрирующая массив пикселей во всех областях датчика изображения, показанного на фиг.1.
На фиг.10 показана схема, иллюстрирующая способ группирования пикселей, выполняемый при поперечном детектировании дефокусирования.
На фиг.11 показана схема, иллюстрирующая характеристики выборки изображения при поперечном детектировании дефокусирования.
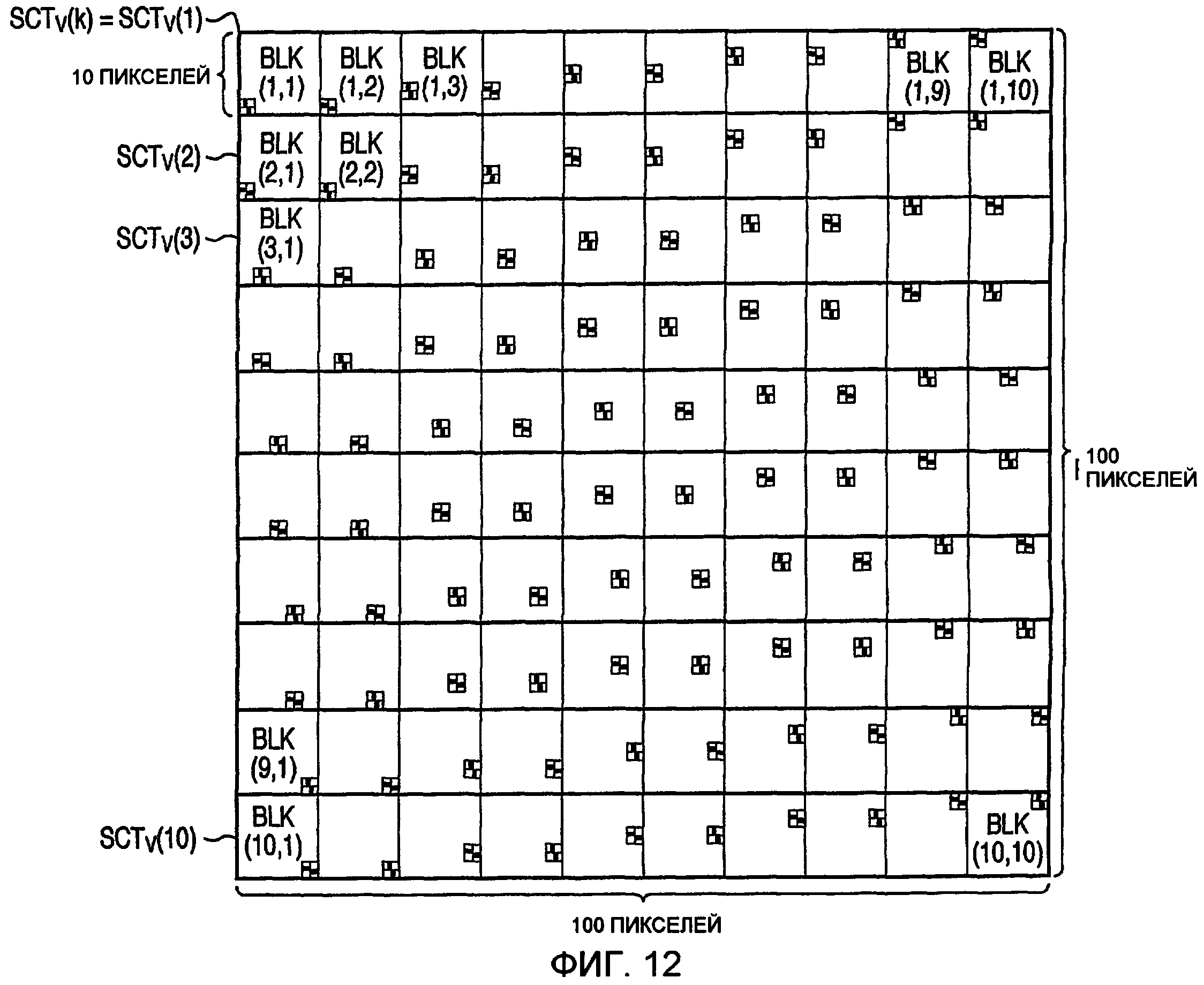
На фиг.12 показана схема, иллюстрирующая способ группирования пикселей, выполняемый при продольном детектировании дефокусирования.
На фиг.13 показана схема, иллюстрирующая характеристики выборки изображения при продольном детектировании дефокусирования.
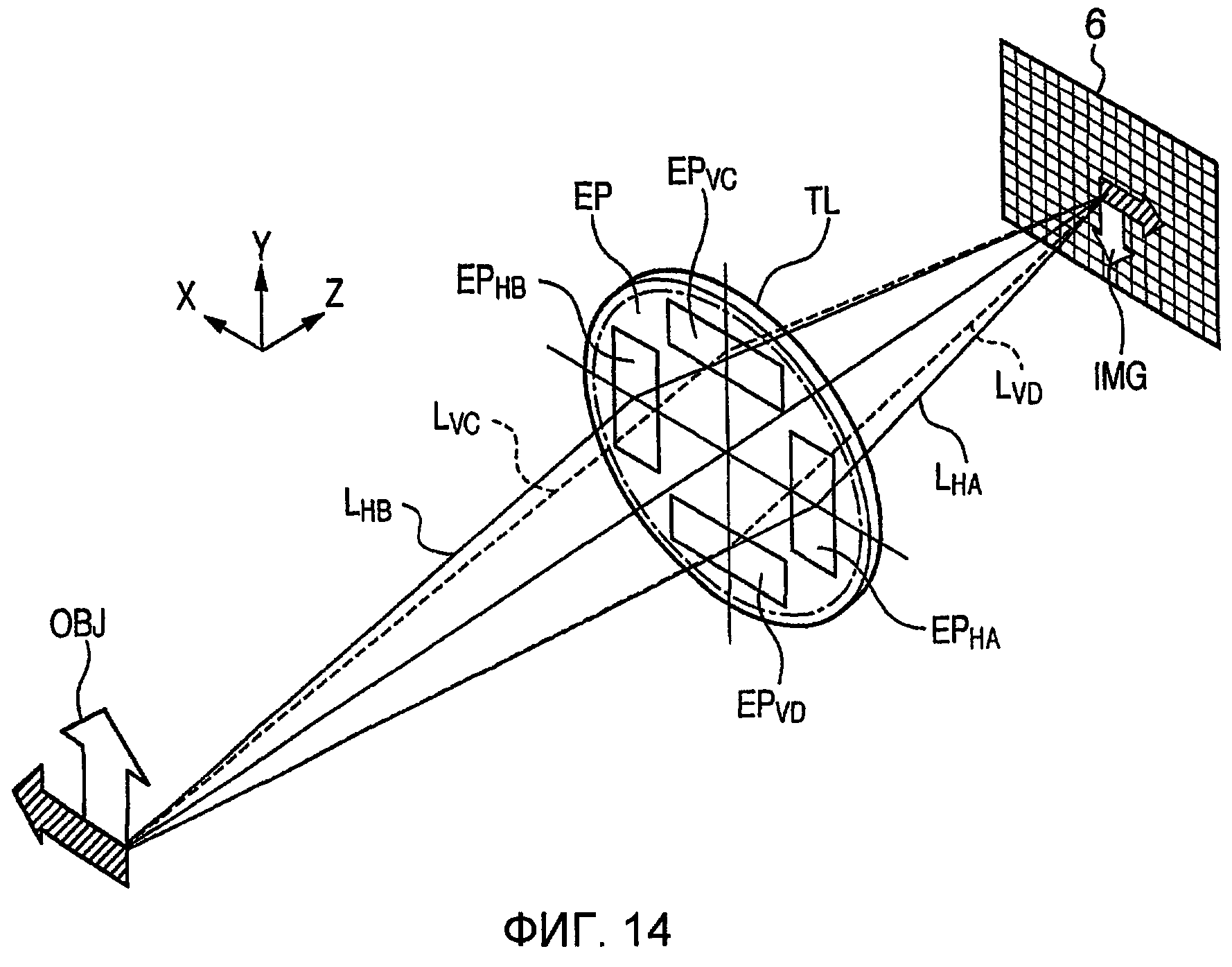
На фиг.14 показана концептуальная схема для описания состояний разделения зрачка в датчике изображения, показанном на фиг.1.
На фиг.15 показана схема, иллюстрирующая операции AF во время предварительного просмотра в реальном времени.
На фиг.16 показана схема, представляющая структуру формата сжатого файла изображения Exif.
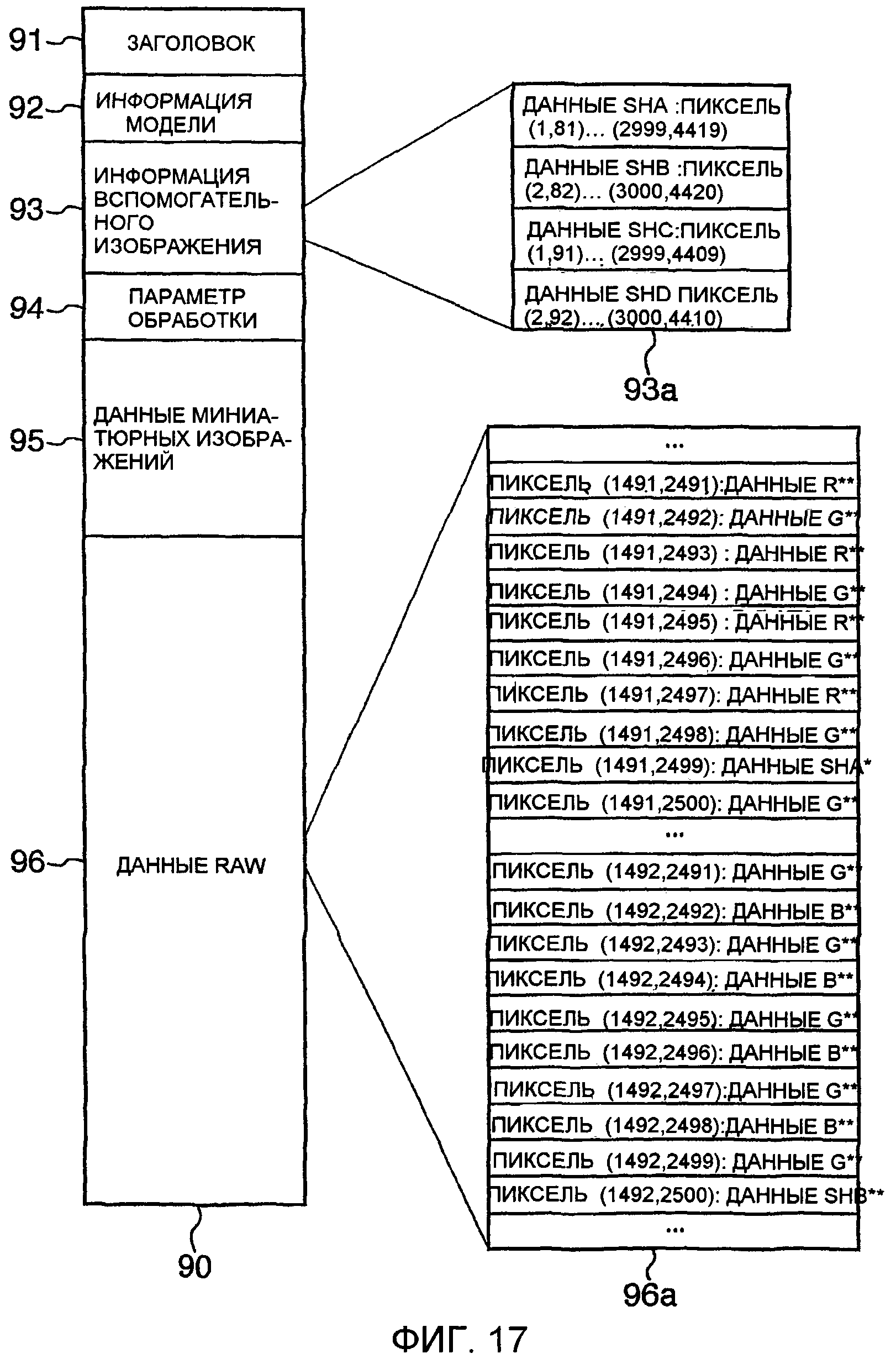
На фиг.17 показана схема, представляющая структуру формата файла данных изображения RAW.
На фиг.18 показана блок-схема последовательности операций, представляющая основные операции цифровой камеры, представленной на фиг.1.
На фиг.19 показана блок-схема последовательности операций, предназначенная для описания деталей нормальной процедуры захвата, показанной на фиг.18.
На фиг.20 показана блок-схема последовательности операций, предназначенная для описания деталей процедуры записи сигнала пикселя AF, представленной на фиг.18.
На фиг.21 показана блок-схема последовательности операций, предназначенная для описания деталей процедуры отображения при предварительном просмотре в реальном времени, показанной на фиг.18.
На фиг.22 показана блок-схема последовательности операций, предназначенная для описания деталей процедуры AF разности фаз в плоскости считывания изображения, показанной на фиг.18.
На фиг.23 показана блок-схема последовательности операций, предназначенная для описания подробностей процедуры съемки при предварительном просмотре в реальном времени, показанной на фиг.18.
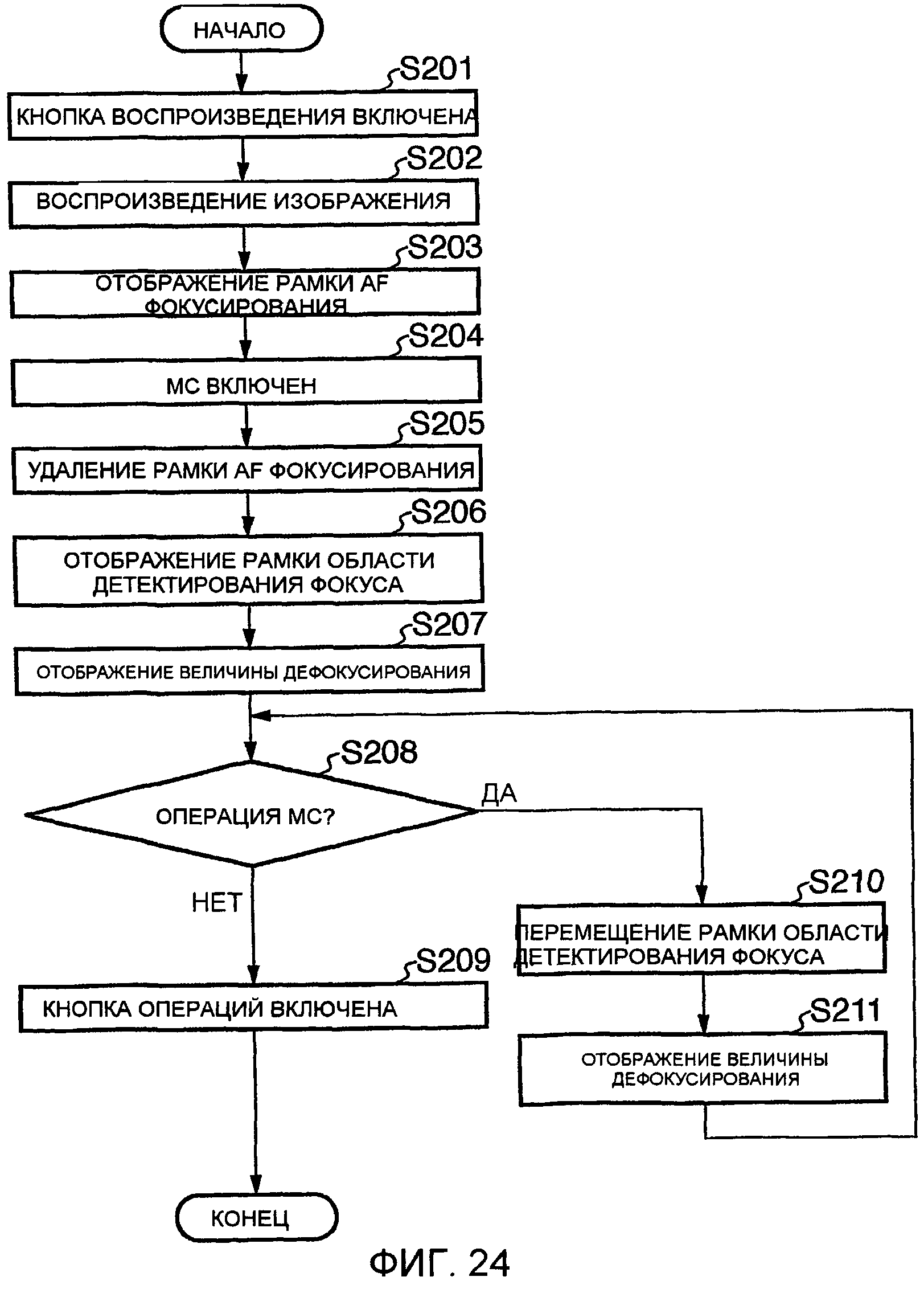
На фиг.24 показана блок-схема последовательности операций, представляющая операции цифровой камеры, представленной на фиг. 1, во время воспроизведения изображения.
На фиг.25 показана схема, представляющая операции, выполняемые во время воспроизведения изображения на жидкокристаллическом мониторе цифровой камеры, показанной на фиг.1.
На фиг.26 показана основная блок-схема последовательности операций, представляющая основные операции программного обеспечения для обработки файла RAW в устройстве обработки изображения.
На фиг.27 показана схема, представляющая условие, при котором программное обеспечение обработки файла RAW отображается на дисплее устройства обработки изображения.
Подробное описание изобретения
Ниже приведено подробное описание вариантов осуществления настоящего изобретения со ссылкой на чертежи.
Вариант 1 осуществления
На фиг.1 и 2 показаны виды в поперечном сечении цифровой зеркальной камеры с одним объективом, которая представляет собой Вариант 1 осуществления устройства съемки изображения в соответствии с настоящим изобретением.
Позицией 1 обозначен корпус камеры, и позицией 2 обозначено крепление, которое обеспечивает возможность прикрепления описанного ниже фотообъектива 3 и отсоединения его от корпуса 1 камеры и которое имеет модуль интерфейса для обеспечения возможности передачи различных типов сигналов и подачи питания для привода. Позицией 3 обозначен съемный фотообъектив, который включает в себя группу линз фокусирования, группу линз масштабирования и устройство диафрагмы, которое не показано. На фиг.1 и 2 каждая группа линз показана как отдельная линза для удобства, и, например, группа линз фокусирования показана как линза 3a фокусирования. Однако фотообъектив 3 фактически выполнен с использованием сложной комбинации групп линз, которые включают в себя множество линз. Следует отметить, что линзы 3a фокусирования не ограничены линзами, расположенными с передней стороны фотообъектива 3, как показано на фиг.1 и 2.
Позицией 4 обозначено основное зеркало, которое выполнено, как полупрозрачное зеркало и может поворачиваться в соответствии с рабочим состоянием камеры. Когда требуется наблюдать объект через видоискатель, основное зеркало 4 устанавливают так, что оно наклонено на оптическом пути фотографирования, и, таким образом, основное зеркало 4 отклоняет луч света от фотообъектива 3 и направляет этот луч света на описанную выше оптическую систему видоискателя (фиг.1). Во время захвата и предварительного просмотра в реальном времени основное зеркало 4 выводят из оптического пути фотографирования, и, таким образом, луч света направляется через фотообъектив 3 к описанному ниже датчику 6 изображения (фиг.2). Позицией 5 обозначен затвор, который управляет падением луча света от фотообъектива 3 на описанный ниже датчик 6 изображения, в результате чего затвор 5 обычно находится в закрытом состоянии (фиг.1) и в открытом состоянии во время захвата и предварительного просмотра в реальном времени (фиг.2).
Позицией 6 обозначен датчик изображения, который выполнен как датчик изображения CMOS, и его периферийные схемы. Датчик 6 изображения выполнен так, что возможен независимый выход из всех пикселей. Кроме того, некоторые из пикселей представляют собой пиксели детектирования фокуса, которые обеспечивают возможность, таким образом, детектирования фокуса, с использованием способа детектирования разности фаз на плоскости считывания изображения (AF разности фаз). Более конкретно, датчик 6 изображения имеет множество пикселей съемки изображения, которые генерируют изображение объекта в результате приема света, который прошел через все области выходного зрачка (описанный ниже EP) фотообъектива 3, который формирует изображение объекта. Датчик 6 изображения, кроме того, имеет множество пикселей детектирования фокуса, которые принимают свет, который прошел через некоторые области (ниже описанные EPHA и EPHB) выходного зрачка EP фотообъектива 3. Все вместе пиксели детектирования фокуса могут принимать свет, который прошел через все области выходного зрачка фотообъектива 3.
Позицией 7 обозначено вспомогательное зеркало, которое поворачивается вместе с основным зеркалом 4, и когда основное зеркало 4 установлено так, что оно наклонено в оптический пути фотографирования, вспомогательное зеркало 7 изгибает луч света, который прошел через основное зеркало 4, в направлении описанного ниже датчика 8 AF и направляет луч света к датчику 8 AF (фиг.1). Во время съемки и во время предварительного просмотра вспомогательное зеркало 7 отводят из оптического пути фотографирования путем поворота вместе с основным зеркалом 4 (фиг.2). Вспомогательное зеркало 7 не является полупрозрачным зеркалом и поэтому экранирует датчик 6 изображения, не пропуская на него свет. Позицией 8 обозначен датчик AF, который выполнен, например, как вторичный объектив формирования изображения, и в области датчика, состоящего из CCD (ПЗС, прибор с зарядовой связью) или CMOS (КМОП, комплементарный металлооксидный полупроводник), и который обеспечивает AF на основе разности фаз.
Позицией 9 обозначен экран фокусирования, расположенный в первичной плоскости формирования изображений фотообъектива 3, в результате чего обеспечиваются линзы Френеля (конденсорные линзы) на передней поверхности падения экрана 9 фокусирования, и изображение объекта (изображение видоискателя) формируется на выходной поверхности экрана 9 фокусирования. Позицией 10 обозначена пентапризма, предназначенная для изменения оптического пути видоискателя, и пентапризма 10 преобразует изображение объекта, формируемое на выходной поверхности экрана 9 фокусирования, в расположенное вертикально нереверсивное изображение. Позициями 11-12 обозначен окуляр. Здесь оптическая система, выполненная на основе экрана 9 фокусирования, пентапризма 10 и окуляры 11 и 12 называются оптической системой видоискателя.
Позицией 13 обозначен датчик автоматической экспозиции (AE), который выполнен на основе фотодиодов во взаимно-однозначном соответствии с областями разделенной на множество частей области съемки, и датчик 13 AE измеряет яркость изображения объекта, сформированного на выходной поверхности экрана 9 фокусирования. Позицией 14 обозначен жидкокристаллический монитор (модуль дисплея), который отображает снятые изображения и различные типы информации фотосъемки. В режиме предварительного просмотра в реальном времени жидкокристаллический монитор 14 отображает изображение объекта (изображение объекта), снимаемого датчиком 6 изображения, и также отображает рамку AF, которая может быть установлена с помощью описанного ниже микроконтроллера 33, который представляет собой модуль установки рамки AF, и рамку AF, которая была установлена микроконтроллером 33.
На фиг.3 показана блок-схема, представляющая систему управления цифровой зеркальной камеры с одним фотообъективом.
Позицией 20 обозначен микрокомпьютер (центральный процессор, ниже называемый "MPU"), который управляет модулем камеры и выполняет общее управление камерой. MPU (модуль управления) 20 рассчитывает величину дефокусирования рамки детектирования фокуса путем выполнения AF на основе разности фаз в рамке AF, которая была установлена микроконтроллером 33, который представляет собой описанный ниже модуль установки рамки, путем выполнения расчетов выходных сигналов из пикселей детектирования фокуса в рамке AF.
Позицией 21 обозначен контроллер запоминающего устройства, который выполняет управление различного типа для данных изображения, и позицией 22 обозначено EEPROM (ЭСППЗУ, электрически стираемое программируемое постоянное запоминающее устройство), в котором содержатся, например, данные регулирования и установки для выполнения различных типов управления. Позицией 23 обозначена схема управления объективом в фотообъективе 3, в результате чего схема 23 управления объективом подключена к MPU 20 через соединение 2 и выполняет управление апертурой (не показана) и регулировкой фокуса (управление фокусированием) группы линз фокусирования (не показана) на основе различной информации, которая описана ниже.
Позицией 24 обозначена схема детектирования фокуса, которая выполняет управление накоплением и управление считыванием в отношении датчика области датчика 8 AF и выводит информацию пикселей в каждой точке детектирования фокуса в MPU 20. MPU 20 выполняет известное AF на основе разности фаз при использовании информации пикселей в каждой точке детектирования фокуса, передает обнаруженную информацию детектирования фокуса в схему 23 управления объективом и выполняет регулировку фокусирования для группы линз фокусирования (не показана). Последовательность операций от детектирования фокуса до регулировки фокуса называется операцией автофокусирования AF.
Позицией 25 обозначена схема фотометрии, которая выводит сигналы яркости из каждой области датчика 13 AE в MPU 20. MPU 20 выполняет аналого-цифровое A/D преобразование по сигналам яркости для получения информации фотометрии в отношении объекта, рассчитывает и устанавливает экспозицию съемки при использовании такой информации фотометрии. Последовательность операций от получения такой информации фотометрии до установки экспозиции съемки называется операцией AE.
Позицией 26 обозначена схема управления двигателем, которая управляет двигателем (не показан), который осуществляет приведение в действие основного зеркала 4 и запуск двигателя (не показан), который заряжает затвор 5. Позицией 27 обозначена схема управления затвором, которая управляет подачей энергии к катушке (не показана) для открывания и закрывания затвора 5. Позицией 28 обозначен DC/DC преобразователь (преобразователь постоянного напряжения), который преобразует напряжение источника 29 питания в напряжение, требуемое для схем.
Позицией 30 обозначена пусковая кнопка, которая выводит сигнал SW1 и SW2 в MPU 20. SW1 представляет собой переключатель для начала операции фотометрии (AE) и операции AF, и его устанавливают в положении ВКЛЮЧЕНО во время операции первого нажатия (половинный нажим) пусковой кнопки 30. SW2 представляет собой переключатель для начала операции экспонирования, и его устанавливают в положение ВКЛЮЧЕНО во время операции второго нажатия (полный нажим) на пусковую кнопку 30. Позицией 31 обозначена кнопка режима, и когда выполняют операции с описанной ниже круговой электронной шкалой 32 или микроконтроллером 33 после выполнения операции с кнопкой 31 режима, выбирают один из различных режимов в соответствии с такой входной операцией, и выбранный режим определяют, когда снова нажимают на кнопку 31 режима. Например, тип качества регулируемого изображения для снимаемых изображений может изменяться. Позицией 32 обозначена круговая электронная шкала, которая выводит сигнал ВКЛЮЧЕНО в соответствии с поворотом со щелчком круговой шкалы для реверсивного счетчика (не показан) в MPU 20, и при этом выполняют подсчет количества щелчков во время поворота. Выбор различных цифровых значений, данных и т.п. выполняют в соответствии с таким подсчетом.
Позицией 33 обозначен микроконтроллер (MC), который представляет собой устройство ввода, используемое при выборе и определении различных режимов и рамки AF (рамки детектирования фокуса), отображаемой на жидкокристаллическом мониторе 14 во время описанного ниже предварительного просмотра в реальном времени. Микроконтроллер 33 можно использовать для выполнения восьми типов направленного ввода, а именно вверх, вниз, влево, вправо, вверх вправо, вниз вправо, вверх влево и вниз влево, а также в качестве ввода с использованием операции нажатия. Микроконтроллер 33 функционирует как модуль установки режима, который устанавливает режим предварительного просмотра в реальном времени. Микроконтроллер 33 также функционирует как модуль установки рамки, который устанавливает рамку AF, которая представляет собой цель детектирования фокуса, в произвольное положение в области захвата датчика 6 изображения. Позицией 34 обозначена кнопка источника питания, и источник питания камеры включают/выключают, когда выполняют операции с кнопкой 34 источника питания. Позицией 35 обозначена кнопка воспроизведения, и изображение, записанное на описанном ниже носителе 48 информации, отображают на жидкокристаллическом мониторе 14 при выполнении операций с кнопкой 35 воспроизведения.
Позицией 40 обозначена схема CDS/AGC (КДВ/АРУ, коррелированная двойная выборка/автоматическая регулировка усиления), которая выполняет выборки и хранит сигналы изображения, выводимые из датчика 6 изображения, и выполняет автоматическую регулировку усиления. Позицией 41 обозначен A/D (А/Ц, аналогово-цифровой) преобразователь, который преобразует аналоговый выходной сигнал схемы 40 CDS/AGC в цифровой сигнал. Позицией 42 обозначена схема TG (ГТ, генерирования тактовой частоты), которая передает сигнал управления в датчик 6 изображения, подает сигнал выборки и удержания в схему 40 CDS/AGC и подает сигнал тактовой частоты выборки в A/D преобразователь 41.
Позицией 43 обозначено SDRAM (СЛОЗУ, синхронное динамическое оперативное запоминающее устройство), предназначенное для временной записи, например, изображения, которое было преобразовано в цифровую форму с помощью A/D преобразователя 41. SDRAM 43 может записывать выходные сигналы из пикселей детектирования фокуса во всех областях области съемки 6 изображения. В качестве альтернативы, SDRAM 43 может рассчитывать величину дефокусирования путем выполнения AF на основе разности фаз для всех областей области съемки датчика 6 изображения и записывать величину дефокусирования.
Позицией 44 обозначена схема обработки изображения, которая выполняет разделение Y/C (сигнала яркости/цветоразностного сигнала), коррекцию баланса белого, γ-коррекцию и т.п. Позицией 45 обозначена схема сжатия/восстановления изображения, которая сжимает изображения в соответствии с форматом JPEG или тому подобное и восстанавливает сжатые изображения. Здесь контроллер 21 запоминающего устройства может получать фотометрическую информацию, относящуюся к объекту, обеспечивая выполнение схемой 44 обработки данных изображения обработки сигнала изображения, выводимого из датчика 6 изображения. Позицией 46 обозначен D/A (Ц/А, цифроаналоговый) преобразователь, который преобразует изображение, записанное в SDRAM 43 или на описанный ниже носитель 48 информации, в аналоговый сигнал, так что изображение может отображаться на жидкокристаллическом мониторе 14. Позицией 47 обозначен I/F (ИФ, интерфейс) с носителем 48 информации для записи/сохранения изображений.
Ниже приведено описание AF на основе разности фаз в плоскости считывания изображения, выполняемого с помощью датчика 6 изображения.
В настоящем варианте осуществления в следующем описании раскрыт пример датчика изображения, шаг пикселя которого составляет 8 мкм, эффективное количество пикселей которого составляет 3000 строк по вертикали 4500 столбцов по горизонтали =13,5 миллионов пикселей и размер экрана которого составляет 36 мм по горизонтали 24 мм по вертикали. Кроме того, такой датчик 6 изображения представляет собой двумерный датчик цвета на одном кристалле, в котором был сформирован мозаичный фильтр первичных цветов в виде массива Байера на кристалле на принимающих свет пикселях.
На фиг.4A-6B показаны схемы, предназначенные для описания структуры пикселей съемки и пикселей детектирования фокуса. В настоящем варианте осуществления используется массив Байера, в котором среди группы из четырех пикселей 2 строки на 2 столбца пиксели, которые имеют G (зеленую) спектральную чувствительность, расположены как два пикселя в противоположных углах и пиксель, имеющий R (красную) спектральную чувствительность, и пиксель, имеющий B (синюю) спектральную чувствительность, расположены как два других пикселя. Кроме того, пиксели детектирования фокуса, структура которых описана ниже, расположены дискретно в пределах массива Байера в соответствии с предварительно заданным правилом.
На фиг.4A и 4B показано размещение и структура пикселей съемки.
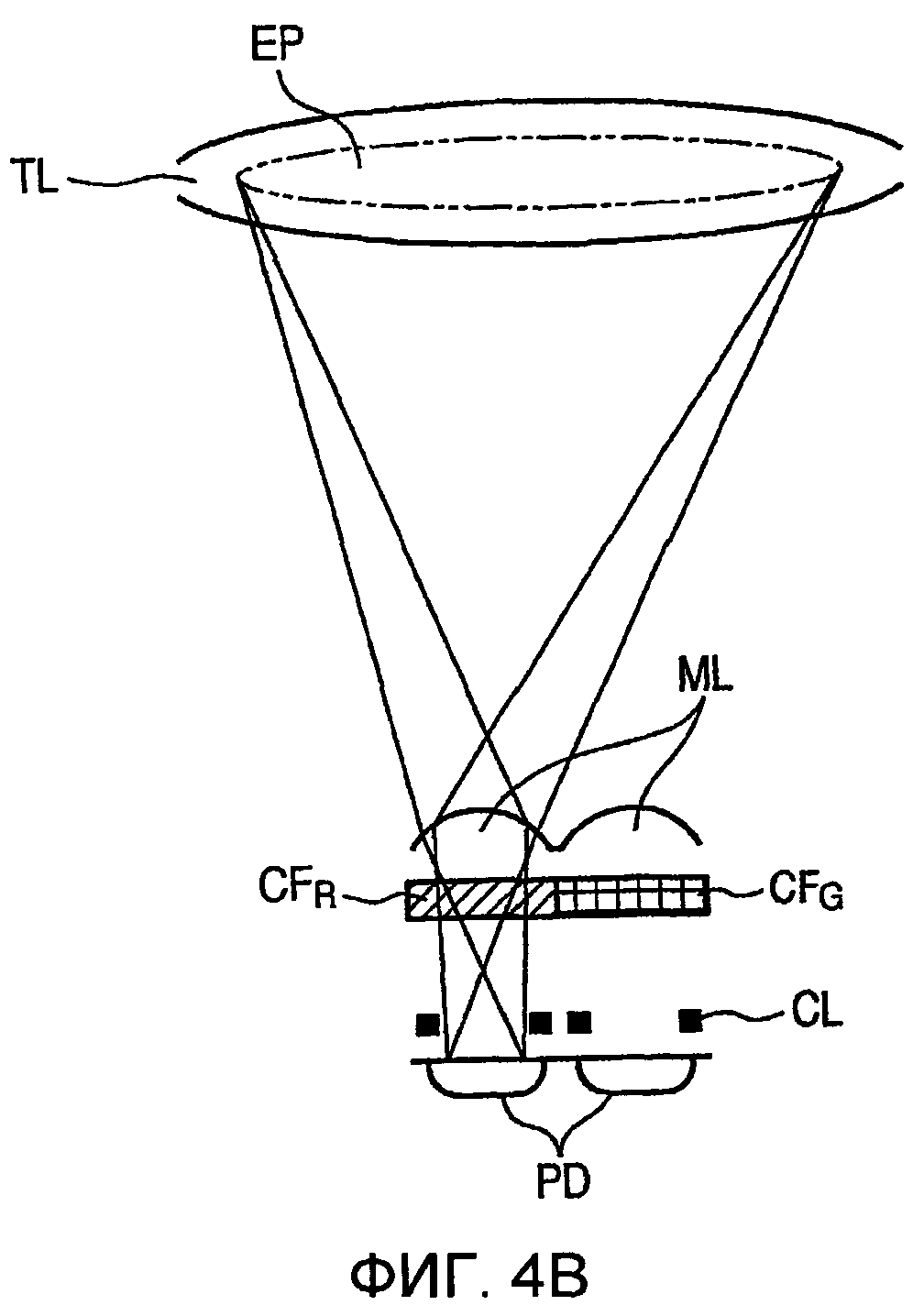
На фиг.4A показан вид в плане группы пикселей съемки размером 2 строки на 2 столбца (третья группа пикселей). Как известно, в массиве Байера пиксели G расположены по диагонали в противоположных углах, и пиксель R и пиксель B расположены как два других пикселя. Кроме того, такая структура размером две строки на два столбца размещена с повторением. На фиг.4B показан вид в поперечном сечении, взятый вдоль линии А-А на фиг.4A. Символом ML обозначены установленные на кристалле микролинзы, расположенные на кристалле поверх каждого пикселя, символом CFR обозначен R (красный) цветной фильтр, и символом CFG обозначен G (зеленый) цветной фильтр. Символом PD (ФД, фотодиод) схематично представлен элемент фотоэлектрического преобразования датчика изображения CMOS. Символом CF (КС, контактный слой) представлен слой разводки для формирования сигнальных линий сигнала, через которые передают различные типы сигналов в датчик изображения CMOS. Символом TL (ОС, съемочный объектив) схематично представлена оптическая фотосистема фотообъектива 3.
Здесь микролинзы ML на кристалле и элементы PD фотоэлектрического преобразования пикселей съемки выполнены так, что луч света, который прошел через оптическую фотосистему TL, принимают с как можно большей эффективностью. Другими словами, выходной зрачок EP (ВЗ, выходной зрачок) оптической фотосистемы TL и элементы PD фотоэлектрического преобразования находятся в сопряженной взаимосвязи, благодаря микролинзам ML, и, кроме того, были разработаны так, что эффективная площадь элементов фотоэлектрического преобразования велика. Следует отметить, что пиксели съемки принимают свет, который прошел через все области выходного зрачка оптической фотосистемы TL. Кроме того, хотя только луч света, который падает на R пиксель, показан на фиг. 4B, эта структура является такой же для пикселя G и пикселя B (синего). В соответствии с этим, выходной зрачок EP, соответствующий каждому из пикселей съемки RGB, имеет большой диаметр, и луч света (фотоны) от объекта принимают эффективно, улучшая, таким образом, S/N (С/Ш, сигнал/шум) сигнала изображения.
На фиг.5A и 5B показаны размещение и структура пикселей детектирования фокуса для разделения зрачка в горизонтальном направлении (направление слева направо или в поперечном направлении) оптической фотосистемы (разделение на первую область выходного зрачка и вторую область выходного зрачка). Здесь горизонтальное направление относится, в случае когда устройство съемки изображения построено так, что оптическая ось оптической фотосистемы и длинная сторона области захвата параллельны земле, к направлению, которое является ортогональным оптической оси и, кроме того, соответствует прямой линии, продолжающейся в горизонтальном направлении. На фиг.5A показан вид в плане группы пикселей размером 2 строки на 2 столбца, которая включает в себя пиксели детектирования фокуса. В случае получения сигнала изображения для записи или просмотра, основные компоненты информации яркости получают из пикселей G. Кроме того, поскольку характеристики распознавания изображения у людей таковы, что чувствительность к информации яркости является высокой, деградация качества изображения легко воспринимается в случае дефицита пикселей G. С другой стороны, пиксели R и пиксели B представляют собой пиксели, которые получают информацию цвета (цветоразностную информацию), и поскольку характеристики зрения людей таковы, что чувствительность к информации цвета низкая, деградация качества изображения слабо воспринимается, даже если в определенной степени недостаточно пикселей, которые получают информацию цвета. Учитывая это, в настоящем варианте осуществления среди пикселей в группе пикселей размером 2 строки на 2 столбца пиксели G были оставлены как пиксели съемки, и пиксели R и пиксели B были заменены пикселями детектирования фокуса (первая группа пикселей и вторая группа пикселей). На фиг.5A такие пиксели детектирования фокуса обозначены как SHA и SHB.
На фиг.5B показан вид в поперечном сечении, взятый вдоль линии А-А на фиг.5A. Структура микролинз ML и элементов PD фотоэлектрического преобразования является той же, что и структура пикселей съемки, показанных на фиг.4B. В настоящем варианте осуществления, поскольку сигналы от пикселей детектирования фокуса не используются при формировании изображения, прозрачная пленка, CFW (белая) установлена на месте фильтров разделения цветов. Кроме того, для разделения зрачка в датчике 6 изображения, апертуры в слое CL разводки проводов размещены в одном направлении относительно центральной линии микролинз ML. В частности, апертура OPHA в пикселе SHA смещена в направлении вправо, и пиксель SHA принимает луч света, который прошел через выходной зрачок EPHA с левой стороны от оптической фотосистемы TL. Апертура OPHB пикселя SHB смещена в направлении влево, и пиксель SHB принимает луч света, который прошел через выходной зрачок EPHB с правой стороны от оптической фотосистемы TL. Пиксели SHA расположены регулярно в горизонтальном направлении, и изображение объекта, получаемое группой таких пикселей, рассматривают как изображение А (первый сигнал изображения). Пиксели SHB также расположены регулярно в горизонтальном направлении, и изображения объекта, получаемые группой таких пикселей, рассматриваются как изображение B (второй сигнал изображения). В соответствии с этим, величину дефокусирования (информацию фокуса) в изображении объекта можно детектировать путем детектирования относительных положений изображения А и изображения B. Следует отметить, что с пикселями SHA и SHB становится возможным выполнять детектирование фокуса в случае, когда изображение объекта имеет распределение яркости в горизонтальном направлении области захвата (то есть вертикальная линия), но при этом невозможно выполнить детектирование фокуса в случае горизонтальной линии, которая имеет распределение яркости в вертикальном направлении. Учитывая это, для обеспечения возможности детектирования состояния фокусирования, также и в последнем случае, настоящий вариант осуществления выполнен так, что он также включает в себя пиксели, которые также выполняют разделение зрачка в вертикальном направлении (продольном направлении) оптической фотосистемы.
На фиг.6A и 6B показаны размещение и структура пикселей детектирования фокуса для выполнения разделения зрачка в вертикальном направлении (в направлении вверх-вниз или в продольном направлении) оптической фотосистемы. Здесь вертикальное направление относится, в случае когда устройство съемки изображения построено так, что оптическая ось оптической фотосистемы и длинная сторона области захвата параллельны земле, к направлению, которое ортогонально оптической оси и, кроме того, соответствует прямой линии, продолжающейся в вертикальном направлении. На фиг.6A показан вид в плане группы пикселей размером 2 строки на 2 столбца, которая включает в себя пиксели детектирования фокуса, и аналогично фиг.5A, пиксели G были оставлены как пиксели съемки, и пиксель R и пиксель B были заменены пикселями детектирования фокуса. На фиг.6A такие пиксели детектирования фокуса обозначены как SVC и SVD ссылочных позиций.
На фиг.6B показан вид в поперечном сечении, взятый вдоль линии А-А на фиг.6A. Структура пикселей, показанная на фиг.6B, является той же, что и структура, показанная на фиг.5B, за исключением того, что в случае, когда пиксели, показанные на фиг.5B, выполняют поперечное разделение зрачка, пиксели, показанные на фиг.6B, выполняют продольное разделение зрачка. Апертура OPVC пикселя SVC смещена в направлении вниз, и пиксель SVC принимает луч света, который прошел через выходной зрачок EPVC на верхней стороне оптической фотосистемы TL. Аналогично, апертура OPVD пикселя SVD смещена в направлении вверх, и пиксель SVD принимает луч света, который прошел через выходной зрачок EPVD на нижней стороне оптической фотосистемы TL. Пиксели SVC расположены регулярно в вертикальном направлении, и изображение объекта, получаемое с помощью группы таких пикселей, рассматривают как изображение C. Пиксели SVD также расположены регулярно в вертикальном направлении, и изображение объекта, получаемое с помощью группы таких пикселей, рассматривают как изображение D. В соответствии с этим, величину дефокусирования (информацию расстояния) в изображении объекта, имеющего распределение яркости в вертикальном направлении, можно детектировать путем детектирования относительных положений изображения C и изображения D.
На фиг.7-9 показаны схемы для описания правила размещения для пикселей съемки и пикселей детектирования фокуса, показанных на фиг.4A-6B. На фиг.7 показана схема для описания правила размещения для минимального модуля в случае, в котором пиксели детектирования фокуса расположены дискретно среди пикселей съемки.
На фиг.7 показана квадратная область из 10 строк × 10 столбцов =100 пикселей, которая определена как блок. В верхнем левом блоке BLKH(1,1) нижний самый левый R пиксель и B пиксель были заменены набором пикселей SHA и SHB детектирования фокуса, которые выполняют разделение зрачка в горизонтальном направлении. В блоке BLKV(1,2), который расположен рядом справа от блока BLKH(1,1), нижний самый левый пиксель R и пиксель B также были заменены набором пикселей SVC и SVD детектирования фокуса, которые выполняют разделение зрачка в вертикальном направлении. Кроме того, массив пикселей блока BLKV(2,1), расположенный рядом и снизу от первого блока BLKH(1,1), является тем же, что и массив пикселей блока BLKV(1,2). Массив пикселей блока BLKH(2,2), расположенный рядом справа от блока BLKV(2,1), является тем же, что и массив пикселей ведущего блока BLKH(1,1). Такое правило размещения может быть обобщено следующим образом: в блоке BLK (i, j) предусмотрены пиксели детектирования фокуса для горизонтального разделения зрачка, если i+j представляет собой четный номер, и предусмотрены пиксели детектирования фокуса для вертикального разделения зрачка, если i+j представляет собой нечетный номер. Кроме того, блоки 2·2=4 на фиг.7, то есть область из 20 строк x 20 столбцов = 400 пикселей, определены как кластер, который представляет собой модуль массива более высокого порядка для блоков.
На фиг.8 показана схема, предназначенная для описания правила размещения с использованием кластера в качестве модуля. На фиг.8 верхний самый левый кластер, составленный из 20 строк × 20 столбцов = 400 пикселей, рассматривают как CST(u, w) = CST(1,1). В кластере CST(1,1) нижний самый левый R пиксель и B пиксель каждого блока были заменены пикселями SHA и SHB или SVC и SVD детектирования фокуса. В кластере CST(1,2), расположенном рядом справа от кластера CST(1,1), пиксели детектирования фокуса в каждом блоке были расположены в положениях, которые сдвинуты на два пикселя вверх относительно кластера CST(1,1). Кроме того, в кластере CST(2,1), который расположен рядом с первым кластером CST(1,1) и ниже от него, пиксели детектирования фокуса в каждом блоке были размещены в положениях, которые сдвинуты на два пикселя вправо относительно кластера CST(1,1). Применяя описанное выше правило, получим размещение, показанное на фиг.8.
Для случая обобщения такое правило размещения описано ниже. Следует отметить, что четыре пикселя, включающие в себя пиксели G, показанные на фиг.5 или 6, рассматриваются как один модуль (пара) и координаты пикселей детектирования фокуса определены координатами верхнего самого левого пикселя среди четырех пикселей. Кроме того, координаты в каждом верхнем левом блоке рассматриваются как (1,1), и направление вниз и направление вправо рассматриваются как положительные. В кластере CST(u, w) горизонтальные координаты пары пикселей детектирования фокуса в каждом из блоков представляют собой 2xu-1, и вертикальные координаты представляют собой 11-2xw. Кроме того, 5×5=25 кластеров на фиг.8, то есть область из 100 строк × 100 столбцов = 10000 пикселей, определены как поле, которое представляет собой модуль массива более высокого порядка для кластеров.
На фиг.9 показана схема для описания правила размещения с использованием поля в качестве модуля. На фиг.9 верхнее самое левое поле, составленное из 100 строк x 100 столбцов = 10000 пикселей, рассматривается как FLD(q, r) = FLD(1,1). Кроме того, в настоящем варианте осуществления массив всех полей FLD(q, r) аналогичен массиву ведущего поля FLD(1,1). Учитывая это, когда 45 полей FLD(q, r) расположены в горизонтальном направлении и 30 полей FLD(q, r) расположены в вертикальном направлении, область съемки, состоящая из 3000 строк × 4500 столбцов = 13,5 миллионов пикселей, будет составлена из 1350 полей FLD(q, r). Таким образом, пиксели детектирования фокуса могут быть распределены однородно по всей области съемки.
Далее описан способ выполнения группирования и суммирования сигнала пикселей во время детектирования фокуса со ссылкой на фиг.10-13.
На фиг.10 показана схема для описания способа группирования пикселей в случае выполнения детектирования фокуса в поперечном направлении дефокусирования изображения объекта, сформированного оптической фотосистемой. Детектирование фокуса в поперечном направлении дефокусирования относится к выполнению детектирования фокуса на основе разности фаз, используя пиксели детектирования фокуса, которые описаны со ссылкой на фиг.5, для разделения выходного зрачка оптической фотосистемы в поперечном направлении (горизонтальном направлении или в направлении слева направо).
Массив пикселей, показанный на фиг.10, является тем же, что и массив пикселей на фиг.8, и в случае выполнения детектирования фокуса всего 10 блоков, то есть один блок по горизонтали и десять блоков по вертикали, рассматривают как одну группу и эту группу определяют как секцию. Область детектирования фокуса формируется в результате конкатенации секций SCTH(k), выровненных в поперечном направлении. В качестве одного примера в настоящем варианте осуществления, область детектирования фокуса выполнена путем конкатенации 10 секций от секции SCTH(1) до секции SCTH(10). Другими словами, область детектирования фокуса представляет собой область из 100 строк × 100 столбцов = 10000 пикселей. Эта область является той же, что и поле, и, как описано со ссылкой на фиг.9, выполняют такие установки, чтобы область съемки была составлена из 1350 фиксированных областей детектирования фокуса. Конечно, существуют различные способы установки, и возможен способ установки, в котором установлены переменные области детектирования фокуса в произвольных положениях в области съемки путем конкатенации секций SCTH(k) в произвольных положениях в области съемки, в соответствии с объектом.
Здесь секция включает в себя пять пикселей SHA, которые выполняют разделение зрачка на одной стороне в поперечном направлении, и пять пикселей SHB, которые выполняют разделение зрачка с другой стороны. Учитывая это, в настоящем варианте осуществления выходные сигналы пяти пикселей SHA суммируют вместе и рассматривают как сигнал для одного пикселя, получая, таким образом, AF пиксель сигнала одного изображения (далее упоминается как изображение А) для расчета разности фаз. Аналогично, выходные сигналы пяти пикселей SHB суммируют вместе и рассматривают как сигнал для одного пикселя, получая, таким образом, пиксель AF другого сигнала изображения (далее упоминается как изображение B) для расчета разности фаз.
На фиг.11 показана схема, предназначенная для описания возможности съемки (захвата) изображения объекта в секции. На фиг.11 показан вид с вырезом секции SCTH(1) на левой кромке фиг.10. Горизонтальные линии PRJH, обозначенные снизу, представляют собой первые линии проекции, продолжающиеся в направлении разделения зрачка пикселей SHA и SHB детектирования фокуса, и вертикальные линии PRJV, обозначенные справа, представляют собой вторые линии проекции, продолжающиеся в направлении, ортогональном направлению разделения зрачка. Здесь выходные сигналы всех пикселей SHA в секции суммируют вместе, и такое же суммирование также выполняют для пикселей SHB. Учитывая это, можно видеть, что в случае рассмотрения пикселя AF в качестве секции, когда модули приема света, включенные в пиксель AF, проецируют вдоль линий PRJH проекции в направлении разделения зрачка, пиксели SHA и SHB плотно совмещены с чередованием. Здесь P1=PHH=2 (единица представляет собой пиксель), где P1 представляет собой шаг массива пикселей SHA на линиях PRJH проекции в направлении разделения зрачка. Если это выразить, используя пространственную частоту F1 вместо шага, в результате получим F1=0,5 (единица представляет собой пиксель/пиксель). Аналогично, шаг массива пикселей SHB на линиях PRJH проекции также составляет P1=2 (единица представляет собой пиксель), и, с учетом пространственной частоты, результат составляет F1=0,5 (единица представляет собой пиксель/пиксель).
С другой стороны, когда модули приема света, включенные в пиксель AF, проецируют вдоль линий PRJV проекции в направлении, ортогональном направлению разделения зрачка, пиксели SHA и SHB выравниваются не часто. Здесь P2=PHV=20 (единица представляет собой пиксель), где P2 представляет собой шаг массива пикселей SHA на линиях PRJV проекции. Когда это выражается с использованием пространственной частоты F2 вместо шага, результат представляет собой F2=0,05 (единица представляет собой пиксель/пиксель). Аналогично, шаг массива пикселей SHB на линиях PRJV проекции также равен P2=20 (единица представляет собой пиксель), и в обозначениях пространственной частоты результат равен F2=0,05 (единица представляет собой пиксель/пиксель).
Другими словами, в пикселе AF в соответствии с настоящим вариантом осуществления в характеристиках распределения перед группировкой шаг в направлении разделения зрачка и шаг в направлении, ортогональном ему, при размещении, равны друг другу. Однако, в случае когда используется прямоугольная форма группирования, при выполнении группирования, ошибка выборки в направлении разделения зрачка уменьшается. В частности, максимальный размер L1 в направлении разделения зрачка секции составляет десять пикселей, и максимальный размер L2 в направлении, ортогональном направлению разделения зрачка, составляет 100 пикселей. Другими словами, если обеспечить, что размеры секции удовлетворяют соотношению L1 На фиг.12 показана схема для описания способа группирования пикселя в случае выполнения детектирования фокуса в продольном направлении дефокусирования для изображения объекта, формируемого оптической фотосистемой. Детектирование фокуса в продольном направлении дефокусирования относится к выполнению детектирования фокуса на основе разности фаз с использованием пикселей детектирования фокуса, которые описаны на фиг.6, для разделения выходного зрачка оптической фотосистемы в продольном направлении (вертикальное направление или направление вверх-вниз). Другими словами, фиг.12 соответствует фиг.10 с поворотом на 90 градусов. Массив пикселей, показанный на фиг.12, является таким же, как и массив пикселей на фиг.8, и в случае выполнения детектирования фокуса, в общей сложности десять блоков, которые представляют собой десять блоков по горизонтали и один блок по вертикали, рассматривают как одну группу и эту группу определяют как секцию. Область детектирования фокуса конфигурируют путем конкатенации секций SCTV(k), выровненных в продольном направлении. В качестве одного примера в настоящем варианте осуществления область детектирования фокуса конфигурируют путем конкатенации 10 секций от секции SCTV(1) до секции SCTV(10). Другими словами, область детектирования фокуса представляет собой область размером 100 строк x 100 столбцов = 10000 пикселей. Эта область является такой же, как и область, описанная со ссылкой на фиг.9, установку выполняют таким образом, чтобы область съемки была составлена из 1350 фиксированных областей детектирования фокуса. Конечно, существуют различные способы установки, и возможен способ установки, в котором установлены переменные области детектирования фокуса в произвольных положениях, в области съемки путем конкатенации секций SCTV(k) в произвольных положениях, в области съемки в соответствии с объектом. Здесь секция включает в себя пять пикселей SVC, которые выполняют разделение зрачка на одной стороне в продольном направлении, и пять пикселей SVD, которые выполняют разделение зрачка с другой стороны. С учетом этого, в настоящем варианте осуществления выходной сигнал пяти пикселей SVC суммируют вместе и рассматривают как сигнал для одного пикселя, получая, таким образом, пиксель AF сигнала одного изображения (называется изображением C) для расчета разности фаз. Аналогично, выходной сигнал пяти пикселей SVD суммируют вместе и рассматривают как сигнал для одного пикселя, получая, таким образом, AF пиксель сигнала другого изображения (называемого изображением D) для расчета разности фаз. На фиг.13 показана схема для описания возможности съемки изображения объекта в секции, и на фиг.13 показан эквивалент фиг.11 с поворотом на 90 градусов. На фиг.13 показан вид с вырезом секции SCTV(1) на верхней кромке фиг.12. Вертикальные линии PRJV, обозначенные справа, представляют собой третьи линии проекции, продолжающиеся в направлении разделения зрачка пикселей SVC и SVD детектирования фокуса, и горизонтальные линии PRJH, обозначенные снизу, представляют собой четвертые линии проекции, продолжающиеся в направлении, ортогональном направлению разделения зрачка. На фиг.12 также выходной сигнал всех пикселей SVC в секции суммируют вместе и аналогичное суммирование выполняют также для пикселей SVD. С учетом этого, можно видеть, что в случае учета пикселя AF как секции, когда модули приема света, включенные в пиксель AF, проецируют вдоль линий PRJV проекции в направлении разделения зрачка, пиксели SVC и SVD плотно выровнены поочередно. Здесь P1=PVV=2 (единица представляет собой пиксель), где P1 представляет собой шаг массива пикселей SVC на линиях PRJV проекций в направлении разделения зрачка. Когда это выражают с использованием пространственной частоты F вместо шага, результат представляет собой F1=0,5 (единица представляет собой пиксель/пиксель). Аналогично, шаг массива пикселей SVD на линиях PRJV проекций также составляет P1=2 (единица представляет собой пиксель), и с обозначением пространственной частоты результат составляет F1=0,5 (единица представляет пиксель/пиксель). С другой стороны, когда модули приема света, включенные в пиксель AF, проецируют вдоль линий PRJH проекции в направлении, ортогональном направлению разделения зрачка, пиксели SVC и SVD выравниваются редко. Здесь P2=PVH=20 (единица представляет собой пиксель), где P2 представляет собой шаг массива пикселей SVC на линии PRJH проекции. Когда это выражают с использованием пространственной частоты F2 вместо шага, результат составляет F2=0,05 (единица составляет пиксель/пиксель). Аналогично, шаг массива пикселей SVD на линии PRJH проекции также равен P2=20 (единица представляет собой пиксель), и в обозначении на основе пространственной частоты результат составляет F2=0,05 (единица представляет собой пиксель/пиксель). Как описано выше, когда учитывают характеристики осуществления выборки пикселя AF на фиг.13, используя направление разделения зрачка как опорное направление, эти характеристики аналогичны характеристикам, показанным на фиг.11, то есть F1> F2. Это связано с тем, что в секции, показанной на фиг.13, размер L1 секции в направлении разделения зрачка и размер L2 в направлении, ортогональном ему, также удовлетворяют взаимозависимости L На фиг.14 показана схема для концептуального описания функции разделения зрачка датчика изображения в соответствии с настоящим вариантом осуществления. На фиг.14 символом OBJ обозначен объект, и символом IMG обозначено изображение объекта. Как описано со ссылкой на фиг.4, пиксели съемки принимают лучи света, которые прошли через все области выходного зрачка EP оптической фотосистемы TL. С другой стороны, как описано со ссылкой на фиг.5 и 6, пиксели детектирования фокуса имеют функцию разделения зрачка. В частности, пиксель SHA на фиг.5 принимает луч LHA света, который прошел через зрачок на левой стороне, если смотреть сзади объектива, от плоскости считывания изображения, то есть луч света, который прошел через зрачок EPHA, показанный на фиг.14. Аналогично пиксели SHB, SVC и SVD соответственно принимают лучи света LHB, LHC и LHD, которые прошли через зрачки EPHB, EPVC и EPVD соответственно. Кроме того, поскольку пиксели детектирования фокуса распределены во всех областях датчика 6 изображения, как описано со ссылкой на фиг.9, детектирование фокуса становится возможным во всех областях области съемки. На фиг.15 показана схема, иллюстрирующая операции AF во время предварительного просмотра, и на фиг.15 показано состояние, в котором изображение отображают на жидкокристаллическом мониторе 14 во время предварительного просмотра в реальном времени. В изображении объекта, сформированном в плоскости считывания изображения на фиг.15, человек находится в центре, забор расположен на переднем плане внизу слева, и горы находятся на заднем плане вверху справа, и все они отображаются на экране. Кроме того, рамку AF отображают в центре экрана. В качестве одного примера в настоящем варианте осуществления размер рамки AF был установлен как шесть полей в поперечном направлении и шесть полей в продольном направлении. Кроме того, рамка AF может перемещаться в произвольное положение в области съемки в соответствии со входным сигналом от микроконтроллера 33. В качестве одного примера в настоящем варианте осуществления, единица перемещения рамки AF составляет одно поле. Конечно, существуют различные величины перемещений, и единица может представлять собой одну секцию или один пиксель. Вначале следует описание AF на основе разности фаз в плоскости считывания изображения. Среди пикселей детектирования фокуса пара SHA и SHB пикселей поперечного детектирования дефокусирования и пара SVC и SVD пикселей продольного детектирования дефокусирования расположены плотно и равномерно по всей области съемки, как показано на фиг.9. В направлении поперечного детектирования дефокусирования сигналы пикселя AF для расчета разности фаз группируют, как показано на фиг.10 и 11. Кроме того, при продольном детектировании дефокусирования сигналы пикселя AF для расчета разности фаз группируют, как показано на фиг.12 и 13. В соответствии с этим, становится возможным устанавливать области детектирования фокуса для поперечного детектирования дефокусирования и продольного детектирования дефокусирования в произвольных положениях в области съемки. Как описано выше, в качестве примера, в настоящем варианте осуществления область детектирования фокуса устанавливают как такую же область, что и поле. На фиг.15 лицо человека присутствует в центре экрана. Если присутствие лица было детектировано с использованием известной в настоящее время технологии распознавания лица, рамку AF отображают на участке, детектируемом как область лица, и детектирование фокуса выполняют в этой рамке AF. Вначале устанавливают области рамки AF AFARH(1) - AFARH(6), каждая из которых представляет собой конкатенацию областей детектирования фокуса для поперечного детектирования дефокусирования, и устанавливают области AFARV(1) - AFARV(6) рамки AF, каждая из которых представляет собой конкатенацию областей детектирования фокуса для продольного детектирования дефокусирования. Область AFARH рамки AF(1) для поперечного детектирования дефокусирования представляет собой конкатенацию шести полей, которые представляют собой области детектирования фокуса в первой строке сверху в рамке AF, то есть от поля FLD(13,21) до поля FLD(13,26). Область AFARH(2) рамки AF представляет собой конкатенацию полей, которые представляют собой области детектирования фокуса во второй строке сверху рамки AF, то есть от поля FLD(14,21) до поля FLD(14,26). Область AFARH(3) рамки AF представляет собой конкатенацию полей, которые представляют собой области детектирования фокуса в третьем ряду сверху в рамке AF, то есть от поля FLD(15,21) до поля FLD(15,26). Область AFARH(4) рамки AF представляет собой конкатенацию полей, которые составляют области детектирования фокуса в четвертой строке сверху в рамке AF, то есть от поля FLD(16,21) до поля FLD(16,26). Область AFARH(5) рамки AF представляет собой конкатенацию полей, которые представляют собой области детектирования фокуса в пятой строке сверху в рамке AF, то есть от поля FLD(17,21) до поля FLD(17,26). Область AFARH(6) рамки AF представляет собой конкатенацию полей, которые представляют собой области детектирования фокуса в шестой строке сверху в рамке AF, то есть от поля FLD(18,21) до поля FLD(18,26). Область AFARV(1) рамки AF для продольного детектирования дефокусирования представляет собой конкатенацию шести полей, которые представляют собой области детектирования фокуса в первом столбце слева в рамке AF, то есть от поля FLD(13,21) до поля FLD(18,21). Область AFARV(2) рамки AF представляет собой конкатенацию полей, которые являются областями детектирования фокуса во втором столбце слева в рамке AF, то есть от поля FLD(13,22) до поля FLD(18,22). Область AFARV(3) рамки AF представляет собой конкатенацию полей, которые представляют собой области детектирования фокуса в третьем столбце слева в рамке AF, то есть от поля FLD(13,23) до поля FLD(18,23). Область AFARV(4) рамки AF представляет собой конкатенацию полей, которые представляют собой области детектирования фокуса в четвертом столбце слева в рамке AF, то есть от поля FLD(13,24) до поля FLD(18,24). Область AFARV(5) рамки AF представляет собой конкатенацию полей, которые представляют собой области детектирования фокуса в пятом столбце слева в рамке AF, то есть от поля FLD(13,25) до поля FLD(18,25). Область AFARV(6) рамки AF представляет собой конкатенацию полей, которые являются областями детектирования фокуса в шестом столбце слева в рамке AF, то есть от поля FLD(13,26) до поля FLD(18,26). На фиг.15 области AFARH(3) и AFARV(5) каждая отображаются как одна из областей рамки AF для поперечного детектирования дефокусирования и продольного детектирования дефокусирования, и другие пять областей были исключены из фиг.15. AFSIGH(A3) представляет собой сигнал изображения А для детектирования разности фаз, который был получен путем суммирования вместе пяти пикселей SHA детектирования фокуса, включенных в секции области AFARH(3) рамки AF, с последующей конкатенацией 60 секций(=10 секций на 1 область детектирования фокуса ширину кадра AF, равную 6 полям). Аналогично AFSIGH(B3) представляет собой сигнал изображения B для детектирования разности фаз, который был получен путем суммирования вместе пяти пикселей SHB детектирования фокуса в секциях, с последующей конкатенацией результатов 60 секций. Величину дефокусирования для объекта получают путем расчета относительной поперечной величины дефокусирования между сигналом изображения А AFSIGH(A3) и сигналом изображения B AFSIGH(B3), с использованием известной операции корреляции. Аналогично, величину дефокусирования для объекта получают для каждой из областей AFARH(1)-AFARH(6) рамки AF. То же самое относится к области AFARV(5) рамки AF. В частности, AFSIGV(C5) представляет собой сигнал изображения C для детектирования разности фаз, который был получен путем суммирования вместе пяти пикселей SVC детектирования фокуса, включенных в секции, с последующей конкатенацией 60 секций(=10 секций на 1 область детектирования фокуса высоту рамки AF, состоящей из 6 полей). Кроме того, AFSIGV(D5) представляет собой сигнал изображения D для детектирования разности фаз, который был получен путем суммирования вместе пяти пикселей SVD детектирования фокуса в секциях, и с последующей конкатенацией результатов 60 секций. Величину дефокусирования для объекта получают путем расчета относительной продольной величины дефокусирования между сигналом изображения C AFSIGV(C5) и сигналом изображения D AFSIGV(D5), с использованием известной операции корреляции. Аналогично, величину дефокусирования для объекта получают для каждой из областей AFARV(1)-AFARV(6) рамки AF. Затем величину дефокусирования в рамке AF получают путем сравнения в сумме 12 величин дефокусирования, которые были детектированы для поперечного дефокусирования и продольного дефокусирования в областях рамки AF, и с использованием значения, которое имеет высокую надежность. Здесь надежность относится к степени совпадения между двумя изображениями, и обычно надежность результата детектирования фокуса является высокой, если степень совпадения между двумя изображениями является хорошей. С учетом этого, если существуют результаты детектирования фокуса для множества областей детектирования фокуса, информацию, которая является высоконадежной, используют с приоритетом. Кроме того, вместо использования надежности, величину дефокусирования рамки AF можно определять, используя такой способ, как применение среднего значения в сумме 12 величин дефокусирования или использование ближайшей величины среди 12 величин дефокусирования. В приведенном выше описании величину дефокусирования области рамки AF получают из сигналов изображения, которые представляют собой конкатенацию всех секций (60 секций) в области рамки AF. Однако величина дефокусирования в области рамки AF может быть получена, например, с помощью способа получения величины дефокусирования каждой из шести областей детектирования фокуса, составляющих область рамки AF, и используя высоконадежное значение или ближайшее значение среди результатов или применяя среднее значение результатов. Кроме того, величина дефокусирования области рамки AF может быть получена с помощью способа, например, получения величины дефокусирования для каждой из 36 областей детектирования фокуса в рамке AF без установки областей рамки AF и затем с использованием высоконадежного значения или ближайшего значения среди результатов или используя среднее значение результатов. В то же время после перемещения рамки AF на участок забора в нижней левой части экрана величина дефокусирования объекта может быть детектирована путем повторной установки областей рамки AF для поперечного детектирования дефокусирования и продольного детектирования дефокусирования таким же образом. Однако, поскольку основная часть участка забора представляет собой компонент вертикальной линии (то есть участок забора имеет горизонтальное распределение яркости), можно определить, что объект пригоден для поперечного детектирования дефокусирования. По этой причине величина дефокусирования объекта может быть получена путем установки только областей AFARH(n) рамки AF для поперечного детектирования дефокусирования и путем расчета поперечной величины дефокусирования из сигнала изображения А и сигнала изображения B так же, как и для области AFARH(3) рамки AF. Ниже описано получение величины дефокусирования на основе установки областей рамки AF. Однако можно без установки областей рамки AF рассчитывать поперечную величину дефокусирования в каждой области детектирования фокуса из сигнала изображения А и сигнала изображения B и получать величину дефокусирования объекта на основе высоконадежной информации среди результатов детектирования фокуса для областей детектирования фокуса. Другими словами, одновременно, когда получают величину дефокусирования области лица человека в центре экрана, которая была детектирована как основной объект в результате распознавания лица, становится возможным получать величину дефокусирования другого объекта (в данном случае забора в нижней левой части экрана) в области съемки. При перемещении рамки AF на участок гор в верхней правой части экрана, величина дефокусирования объекта может быть детектирована путем установки областей рамки AF для поперечного детектирования дефокусирования и продольного детектирования дефокусирования так же, как описано выше. Однако, поскольку основная часть участка гор представляет собой компонент горизонтальной линии (то есть участок гор имеет вертикальное распределение яркости), можно определить, что объект пригоден для продольного детектирования дефокусирования. По этой причине величина дефокусирования объекта может быть получена путем установки только областей AFARV(n) рамки AF для продольного детектирования дефокусирования и путем расчета величины поперечного дефокусирования из сигнала изображения C и сигнала изображения D таким же образом, как и для области AFARV(5) рамки AF. Выше описано получение величины дефокусирования на основе предположения установки областей рамки AF. Однако возможно без установки областей рамки AF рассчитать поперечную величину дефокусирования каждой из областей детектирования фокуса из сигнала изображения C и сигнала изображения D и получить величину дефокусирования объекта на основе высоконадежной информации среди результатов детектирования фокуса для областей детектирования фокуса. Другими словами, одновременно с получением величины дефокусирования на участке лица человека в центре экрана, который был определен как основной объект в результате распознавания лица, становится возможным получать величину дефокусирования другого объекта (в данном случае гор в верхней правой части экрана) в области съемки. Как описано выше, в настоящем варианте осуществления, поскольку области детектирования фокуса для поперечного детектирования дефокусирования и продольного детектирования дефокусирования установлены во все области датчика 6 изображения, даже когда существуют различные положения проекции объекта и различные ориентации распределения яркости, возможно выполнить детектирование фокуса на основе AF разности фаз в плоскости считывания изображения во всех областях области съемки. Далее представлено описание способа записи фотографируемого изображения в файл изображения. На фиг.16 показана схема, представляющая структуру формата сжатого файла изображения Exif. Позицией 60 обозначен файл сжатого изображения JPEG, который сконфигурирован по порядку из маркера 61 SOI вначале, который обозначает начало файла, сегмента 1 (APP1) маркера 62 приложения, в котором записана информация приложенного Exif, сегмента 2 (APP2) маркера 63 приложения, в котором записаны данные расширения Exif, сегмента (DQT) маркера 64 таблицы квантования, сегмента (DHT) маркера 65 таблицы Хаффмана, сегмента (DRI) маркера 66 повторного запуска, сегмента (SOF) маркера 67 заголовка кадра, сегмента (SOS) маркера 68 заголовка сканирования, сжатых данных (Сжатые данные) 69 изображения и маркера 70 EOI, который обозначает конец файла. Что касается внутренней структуры APP1 (62), APP1 (62) выполнен из маркера 71 APP1 вначале, который обозначает, что он представляет собой область приложения, Length (длина) 72, который обозначает размер области приложения, кода 73 идентификации Exif и приложенного информационного тела. Приложенная информация имеет структуру TIFF, включающую в себя заголовок 74 файла, и приложенная информация выполнена из 0-го IFD 75, в котором записана приложенная информация, относящаяся сжатому изображению (основное изображение), IFD 76 Exif для записи приложенной информации, специфичной для Exif в 0-й IFD (область записи приложенной информации), и 1-й IFD 77, в которой записано миниатюрное изображение. Что касается структуры тега (специальный признак) информации атрибутов, записанной в IFD 76 Exif, приложенная информация сконфигурирована из тега 81 Exif Version вначале, тега 82 Marker Note, в котором изготовитель может записывать индивидуальную информацию, тега 83 User Comment, в котором пользователь может записывать индивидуальную информацию указателя (указателя функциональной совместимости IFD) 84, указывающую на IFD, и области (значение Exif IFD) 85, в которой фактически записывают данные. Позицией 85a обозначен пример данных AF на основе разности фаз в плоскости считывания изображения, которое было записано, и в данном примере величина дефокусирования (данные диапазона) для каждой области детектирования фокуса, полученная с помощью AF на основе разности фаз в плоскости считывания изображения, записана с возможностью ее получения. Вначале в тег 82 Maker Note записана информация, обозначающая, какая область из области 85 записи данных имеет величину данных 85a дефокусирования, записанную в нем. Величина данных 85a дефокусирования записана, начиная в области детектирования фокуса в верхней левой части плоскости считывания изображения на фиг.9 и 15 (то есть в поле FLD(1,1)) и заканчивая в области детектирования фокуса в нижней правой части в плоскости считывания изображения (то есть в поле (30,45)). Что касается порядка записи, запись начинается горизонтально от поля FLD(15,21) до поля FLD(15,22), до поля FLD(15,23), до поля FLD(15,24), до поля FLD(15,25) и до поля FLD(15,26), и когда горизонтальный ряд заканчивается, запись выполняют в области, которая расположена следующей в вертикальном направлении. На фиг.17 показана схема, представляющая структуру формата файла изображения с данными RAW. Здесь данные RAW представляют собой так называемые данные необработанного изображения в формате изображения, в котором сигнал изображения, выводимый датчиком 6 изображения, был подвергнут только цифровому преобразованию с помощью A/D преобразователя 41, и различные типы обработки данных, такие как разделение Y/C, коррекция баланса белого, γ-коррекция и манипуляция со сжатием, не были еще выполнены. В соответствии с этим, данные RAW имеют очень большой размер, и поэтому пользователь имеет высокую степень свободы при выполнении обработки изображения в более позднее время. По этой причине данные RAW имеют особенность, которая позволяет свободно корректировать изображение, снятое пользователем, в соответствии с пожеланиями пользователей, при поддержании высокого качества изображения. Позицией 90 обозначен файл изображения в формате данных RAW, и этот файл изображения сконфигурирован из заголовка 91 вначале, информации 92 модели камеры, обозначающей модель камеры, используемой при съемке, информации 93 вспомогательного изображения, в которой могут быть записаны различные типы информации в соответствии с форматом тега Exif, параметров 94 обработки, таких как значение баланса белого и γ-величина, для обработки данных RAW, данных 95 миниатюрного изображения и данных 96 RAW. Кроме того, во вспомогательной информации 93 изображения записана информация 93a размещения пикселя детектирования фокуса, которая обозначает место размещения датчика 6 изображения, где размещены пиксели детектирования фокуса. Позицией 96a обозначен пример содержимого данных RAW, и в данном примере данные 96a представляют область, имеющую пиксели детектирования фокуса в нижнем правом углу поля FLD(15,25), и выходные данные каждого пикселя записывают в данные 96a. Аналогично данным 85a, записанные данные начинаются с данных пикселя в верхней левой части плоскости считывания изображения и заканчиваются данными пикселя в нижней правой части. В частности, данные 96a показаны в первой и второй строках в блоке BLK(150, 250) в нижнем правом углу поля FLD(15,25). В первой строке пиксель (1491,2491) представляет собой пиксель R захвата, в который записывают данные R, пиксель (1491,2492) представляет собой пиксель G захвата, в который записывают данные G, пиксель (1491,2493) представляет собой пиксель R захвата, в который записывают данные R, пиксель (1491,2494) представляет собой пиксель G захвата, в который записывают данные G, пиксель (1491,2495) представляет собой пиксель R захвата, в который записывают данные R, пиксель (1491,2496) представляет собой пиксель G захвата, в который записывают данные G, пиксель (1491,2497) представляет собой пиксель R захвата, в который записывают данные R, пиксель (1491,2498) представляет собой пиксель G захвата, в который записывают данные G, пиксель (1491,2499) представляет собой пиксель SHA детектирования фокуса, в который записывают данные SHA, и пиксель (1491,2500) представляет собой пиксель G захвата, в который записывают данные G. Во второй строке пиксель (1492,2491) представляет собой пиксель G захвата, в который записывают данные G, пиксель (1492,2492) представляет собой пиксель B захвата, в который записывают данные B, пиксель (1492,2493) представляет собой пиксель G захвата, в который записывают данные G, пиксель (1492,2494) представляет собой пиксель B захвата, в который записывают данные B, пиксель (1492,2495) представляет собой пиксель G захвата, в который записывают данные G, пиксель (1492,2496) представляет собой пиксель B захвата, в который записывают данные B, пиксель (1492,2497) представляет собой пиксель G захвата, в который записывают данные G, пиксель (1492,2498) представляет собой пиксель B захвата, в который записывают данные B, пиксель (1492,2499) представляет собой пиксель G захвата, в который записывают данные G, и пиксель (1492,2500) представляет собой пиксель SHB детектирования фокуса, в который записывают данные SHB. Таким образом, данные всех пикселей записаны в порядке, начиная с пикселей в горизонтальном направлении, и когда запись пикселей в горизонтальной строке заканчивается, записывают строку пикселей, которая является следующей в вертикальном направлении. Далее представлено описание работы цифровой зеркальной фотокамеры с одним объективом в соответствии с настоящим вариантом осуществления со ссылкой на блок-схему последовательности операций управления, показанную на фиг.18-22. На фиг.18 представлена основная блок-схема последовательности операций управления, представляющая основные операции цифровой зеркальной фотокамеры с одним объективом. На этапе S101 пользователь включает источник питания камеры, нажимая на кнопку 34 источника питания. Когда источник питания включен, MPU 20 проверяет работоспособность исполнительных элементов и датчика 6 изображения камеры. После этого проверяют содержимое запоминающего устройства и состояние инициализации исполнительной программы и выполняют операцию подготовки к съемке. На этапе S102 выполняют различные типы установки камеры, оперируя с различными типами кнопок. Например, режим съемки выбирают с помощью кнопки 31 режима и установки скорости затвора, диафрагмы и качества записи снимаемого изображения выполняют с помощью круговой электронной шкалы 32. На этапе S103 определяют, был ли установлен режим предварительного просмотра в реальном времени микроконтроллером 33, в результате чего обработка переходит к процедуре режима предварительного просмотра в реальном времени на этапе S111, если был установлен режим предварительного просмотра, и обработка переходит к процедуре нормального режима на этапе S104, если режим предварительного просмотра не был установлен. Вначале представлено описание работы процедуры в нормальном режиме (режим нормального использования зеркальной камеры с одним объективом, в котором пользователь захватывает изображение, рассматривая его через видоискатель). На этапе S104 определяют, была ли нажата пусковая кнопка 30 наполовину и переключатель SW1 переведен в состояние ВКЛЮЧЕНО, в результате чего обработка переходит на этап S105, если SW1 ВКЛЮЧЕН, и если SW1 не ВКЛЮЧЕН, обработка ожидает, пока SW1 не станет ВКЛЮЧЕННЫМ. На этапе S105 выполняют заданную операцию AF, используя датчик 8 AF. На этапе S106 выполняют заданную операцию AE, используя датчик 13 AE. На этапе S107 отображают местоположение точки детектирования фокуса, которая была сфокусирована в видоискателе, на устройстве дисплея, которое не показано. На этапе S108 определяют, была ли пусковая кнопка 30 нажата полностью и ВКЛЮЧЕН ли SW2, в результате чего обработка переходит на этап S109, если SW2 ВКЛЮЧЕН, и если SW2 не ВКЛЮЧЕН, обработка ожидает, пока SW2 не станет ВКЛЮЧЕННЫМ. На этапе S109 выполняют процедуру нормальной съемки. На фиг.19 показана блок-схема последовательности операций, представляющая процедуру нормальной съемки. На этапе S131 приводным двигателем зеркала (не показан) управляют с помощью схемы 26 управления двигателем и основное зеркало 4 и вспомогательное зеркало 7 отводят из оптического пути фотографирования (зеркало в верхнем положении) (фиг.2). На этапе S132 управляют апертурой (не показана) в фотообъективе 3 с помощью схемы 23 управления объективом, в соответствии с экспозицией съемки, рассчитанной по результату AE. На этапе S133 затвор 5 открывают и закрывают с помощью схемы 27 управления затвором. На этапе S134 сигналы изображения на основе света, принимаемого датчиком 6 изображения, считывают и записывают в SDRAM 43 с помощью контроллера 21 запоминающего устройства. Такие временно записанные данные представляют собой данные захваченного изображения. На этапе S135 выполняют интерполяцию потерянных пикселей в сигналах изображения, считываемых контроллером 21 запоминающего устройства. Причина этого состоит в том, что, поскольку в выходном сигнале пикселей детектирования фокуса отсутствует информация цвета RGB для съемки и такие пиксели соответствуют дефектным пикселям в смысле получения изображения, сигналы изображения генерируют, выполняя интерполяцию, используя информацию от окружающих пикселей съемки изображения. Изображение интерполяции дефектных пикселей формируют на основе генерируемых сигналов изображения и исходных сигналов изображения и изображение интерполяции дефектного пикселя временно записывают в SDRAM 43. На этапе S136 миниатюрное изображение формируют на основе изображения интерполяции дефектных пикселей и временно записывают в SDRAM 43 с помощью контроллера 21 запоминающего устройства. На этапе S137 определяют, было ли выбрано качество записи снимаемого изображения как JPEG или RAW, в результате чего обработка переходит на этап S138, если был выбран JPEG, и обработка переходит на этап S140, если был выбран RAW. На этапе S138 выполняют процедуру записи сигнала пикселя AF. На фиг.20 показана блок-схема последовательности операций, представляющая процедуру записи сигнала пикселя AF. На этапе S151 каждый из пикселей детектирования фокуса, включенных в области детектирования фокуса, считывают с помощью контроллера 21 запоминающего устройства из сигналов изображения, временно записанных в SDRAM 43. На этапе S152 контроллер 21 запоминающего устройства 21 суммирует пиксели детектирования фокуса в секциях на основе структуры секций, описанной со ссылкой на фиг.10 или 12, и получают сигнал пикселя AF для каждой секции на основе результата суммирования. На этапе S153 два сигнала изображения для расчета корреляции генерируют с помощью MPU 20 на основе сигналов пикселя AF. В настоящем варианте осуществления сигнал генерируют для каждой области детектирования фокуса, показанной на фиг.10 и 12. Как описано выше, область детектирования фокуса представляет собой ту же область, что и поле, и, как описано со ссылкой на фиг.9, 1350 пар сигналов генерируют для всей области съемки. На этапе S154 MPU 20 выполняет операцию корреляции по двум полученным изображениям и рассчитывает относительную величину дефокусирования между двумя изображениями. На этапе S155 величину дефокусирования рассчитывают с помощью MPU 20. На этапе S156 рассчитанную величину дефокусирования временно записывают в SDRAM 43 с помощью контроллера 21 запоминающего устройства. Количество величин дефокусирования равно количеству частей данных для 1350 областей детектирования фокуса. После этого обработка возвращается на этап S139 нормальной процедуры съемки по фиг.19. На этапе S139 выполняют обработку изображения, такую как коррекция баланса белого, γ-коррекция и выделение кромок по изображению интерполяции дефектных пикселей с помощью схемы 44 обработки изображения, полученное в результате изображение сжимают с помощью схемы 45 сжатия/восстановления изображения в соответствии с форматом JPEG на основе значений установки камеры, и полученное сжатое изображение записывают в модуле 69 данных сжатого изображения с помощью контроллера 21 запоминающего устройства. Кроме того, миниатюрное изображение записывают в 1-й IFD 77 и данные 85a величины дефокусирования записывают в области 85 записи данных. Кроме того, различные установки камеры (например, скорость затвора, апертура и фокусное расстояние объектива) записывают в соответствии с правилами Exif и, таким образом, из данных различных типов составляют файл JPEG. На этапе S140 сигналы изображения, временно записанные в SDRAM 43, записывают в данные 96 RAW, как показано на 96a с помощью контроллера 21 запоминающего устройства. Кроме того, информацию 93a местоположения пикселей детектирования фокуса, различные типы установки камеры (например, скорость затвора, апертура и фокусное расстояние объектива) и т.п. записывают во вспомогательной информации 93 изображения в соответствии с правилами Exif и миниатюрное изображение записывают в данные 95 миниатюрных изображений, составляя, таким образом, из данных разных типов файл RAW. На этапе S141 файл изображения, который представляет собой файл JPEG или файл RAW, записывают на носитель 48. На этапе S142 двигателем управления зеркалом (не показан) управляют с помощью схемы 26 управления двигателем и основное зеркало 4 и вспомогательное зеркало 7, которые были отведены от оптического пути фотографирования, перемещают в положение наблюдения (зеркало внизу) для отражения и направления захватываемых лучей света в видоискатель(фиг.1). На этапе S143 управляют подачей питания в двигатель заряда (не показан) с помощью схемы 26 управления двигателем и осуществляют заряд затвора 5. После этого обработка возвращается на этап S110 в основной процедуре на фиг.18. На этапе S110 определяют, был ли выключен источник питания камеры в результате операций пользователя с кнопкой 34 источника питания, в результате чего обработка возвращается на этап S102 и выполняют подготовку к следующему случаю съемки, если источник питания не был выключен, и если источник питания был выключен, данная последовательность операций камеры заканчивается. Далее представлено описание процедуры операций в режиме предварительной съемки в реальном времени (режим, в котором пользователь захватывает изображения, используя предварительный просмотр). На этапе S111 выполняют процедуру отображения предварительного просмотра в реальном времени. На фиг.21 показана блок-схема последовательности операций, представляющая процедуру отображения предварительного просмотра в реальном времени. На этапе S161 приводным двигателем зеркала (не показан) управляют с помощью схемы 26 управления двигателем и основное зеркало 4 и вспомогательное зеркало 7 отводят от оптического пути фотографирования (зеркало вверху). На этапе S162 затвор 5 переводят в открытое состояние (состояние, показанное на фиг.2) с помощью схемы 27 управления затвором. На этапе S163 контроллер 21 запоминающего устройства начинает считывать движущиеся изображения на основе света, принятого датчиком 6 изображения. На этапе S164 отображают считываемые движущиеся изображения на жидкокристаллическом мониторе 14. Пользователь просматривает предварительно просматриваемые изображения и определяет композицию для использования при съемке. После этого обработка возвращается на этап S112 в основной процедуре на фиг.18. На этапе S112 выполняют обработку для распознавания, присутствует ли лицо в области съемки. На этапе S113 отображают рамку AF серого цвета, наложенную на предварительно наблюдаемые изображения в реальном времени. Здесь, если присутствие лица в области съемки (захвата) было распознано на этапе S112, рамку AF отображают в распознанной области лица. Если было определено отсутствие лица в области съемки, рамку AF отображают в центре экрана. В настоящем варианте осуществления, как показано на фиг.15, лицо человека детектируют в центре экрана путем распознавания лица и рамку AF отображают в области лица. На этапе S114 выполняют установку области рамки AF. Как описано выше, при установке области рамки AF, области AFARH(1)-AFARH(6) рамки AF устанавливают для поперечного детектирования дефокусирования и области AFARV(1)-AFARV(6) рамки AF устанавливают для продольного детектирования дефокусирования. На этапе S115, в случае когда микроконтроллер 33 детектирует перемещение рамки AF при выполнении операции пользователем, обработка возвращается на этап S114, если рамка AF была перемещена, и обработка переходит на этап S116, если рамка AF не была перемещена. В качестве примера перемещения рамки AF рассмотрим случай, в котором лицо не было распознано, рамка AF отображается в центре экрана, и пользователь желает сфокусироваться на объекте, находящемся за пределами центра экрана. На этапе S116 определяют, была ли нажата пусковая кнопка 30 наполовину и SW1 ВКЛЮЧЕН, в результате чего обработка переходит на этап S117, если SW1 ВКЛЮЧЕН, и если SW1 не ВКЛЮЧЕН, обработка возвращается на этап S112 с учетом возможности изменения композиции. На этапе S117 выполняют процедуру AF на основе разности фаз плоскости считывания изображения. На фиг.22 показана блок-схема последовательности операций, представляющая процедуру AF на основе разности фаз плоскости считывания изображения. На этапе S171 контроллер 21 запоминающего устройства считывает из датчика 6 изображения каждый пиксель детектирования фокуса, включенный в области детектирования фокуса, которые были установлены как области рамки AF. На этапе S172 контроллер 21 запоминающего устройства добавляет пиксели детектирования фокуса в каждую секцию на основе структуры участка, описанной на основе структуры секции, описанной со ссылкой на фиг.10 или 12, и получают сигнал пикселя AF для каждой секции на основе результатов суммирования. На этапе S173 два сигнала изображения для расчета корреляции генерируют с помощью MPU 20 на основе сигналов пикселя AF. В настоящем варианте осуществления генерируют пары сигналов, которые представляют собой конкатенации 60 секций, таких как AFSIGH(A3), и AFSIGH(B3), и AFSIGV(C5), и AFSIGV(D5), которые показаны на фиг.15. На этапе S174 MPU 20 выполняет операцию корреляции по двум полученным изображениям и рассчитывает относительную величину дефокусирования между двумя изображениями. На этапе S175 определяют надежность результатов операции корреляции с помощью MPU 20. На этапе S176 величину дефокусирования рассчитывают с помощью MPU 20 на основе высоконадежных результатов детектирования. Здесь одну величину дефокусирования в рамке AF определяют и сохраняют. На этапе S177 величину дефокусирования передают в схему 23 управления объективом и выполняют управление группой линз фокусирования (не показана) в фотообъективе 3 для фокусирования. После этого обработка возвращается на этап S118 в основной процедуре по фиг.18. В процедуре AF на основе разности фаз в плоскости считывания изображения величину дефокусирования не рассчитывают для областей детектирования фокуса, которые не были установлены как области рамки AF. Это связано с тем фактом, что поскольку операция корреляции занимает длительное время по сравнению с другой обработкой, выполняемой MPU 20, время обработки MPU 20 может быть уменьшено, хотя бы незначительно, благодаря тому, что не выполняется обработка данных для областей детектирования фокуса, которые находятся за пределами рамки AF и величины дефокусирования которых не являются необходимыми. Конечно, если MPU 20 обладает достаточной вычислительной производительностью, величины дефокусирования каждой области детектирования фокуса могут быть рассчитаны и временно записаны, и управление фокусом может быть выполнено быстро, в случае перемещения рамки AF. На этапе S118 на фиг.18 пользователя информируют о том, что фокусирование было закончено в рамке AF, путем изменения цвета рамки AF с серого на зеленый. На этапе S119 определяют, была ли полностью нажата пусковая кнопка 30 и SW2 ВКЛЮЧЕН, в результате чего обработка переходит на этап S120, если SW2 был ВКЛЮЧЕН, и если SW2 не был ВКЛЮЧЕН, обработка ожидает, пока SW2 не станет ВКЛЮЧЕННЫМ. На этапе S120 выполняют процедуру съемки в режиме предварительного просмотра в реальном времени. На фиг.23 показана блок-схема последовательности операций, представляющая процедуру съемки в режиме предварительного просмотра в реальном времени. На этапе S181 сигналы изображения считывают с датчика 6 изображения с помощью контроллера 21 запоминающего устройства и получают информацию фотометрии в отношении основного объекта, на который был наведен фокус, и в отношении его периферии, то есть выполняют операцию AE с плоскости считывания изображения. На этапе S182 выполняют управление апертурой (не показана) фотообъектива 3 с помощью схемы 23 управления объектива в соответствии с экспозицией съемки, рассчитанной по результату AE в плоскости считывания изображения. На этапе S183 контроллер 21 запоминающего устройства выполняет сброс сигналов изображения, полученных на основе света, принятого датчиком 6 изображения, возвращая, таким образом, состояние приема света датчика 6 изображения в исходное состояние, то есть в состояние, в котором изображение не было захвачено. На этапе S184 контроллер 21 запоминающего устройства снова обеспечивает выполнение датчиком 6 изображения приема света, считывает сигналы изображения и временно записывает эти сигналы изображения в SDRAM 43. На этапе S185 выполняют интерполяцию отсутствующих пикселей на сигналах изображения, считываемых контроллером 21 запоминающего устройства. Причина этого состоит в том, что поскольку в выходном сигнале пикселей детектирования фокуса отсутствует информация цвета RGB для съемки и такие пиксели соответствуют дефектным пикселям в смысле получения изображения, сигналы изображения генерируют путем выполнения интерполяции с использованием информации от окружающих пикселей съемки изображения. Изображение интерполяции дефектных пикселей генерируют на основе генерируемых сигналов изображения и исходных сигналов изображения и изображение интерполяции дефектных пикселей временно записывают в SDRAM 43. На этапе S186 формируют миниатюрное изображение на основе изображения интерполяции дефектных пикселей и временно записывают в SDRAM 43 с помощью контроллера 21 запоминающего устройства. На этапе S187 определяют, было ли выбрано качество записи снятого изображения как JPEG или RAW, в результате чего обработка переходит на этап S188, если был выбран JPEG, и обработка переходит на этап S190, если был выбран RAW. На этапе S188 выполняют процедуру записи сигнала пикселя AF. Описание ее исключено, поскольку она представляет собой то же управление, что и в блок-схеме потока обработки в процедуре записи сигнала пикселя AF, показанной на фиг.20. На этапе S189 обработку изображения, такую как коррекция баланса белого, γ-коррекция и выделение кромок, выполняют для изображения интерполяции дефектных пикселей с помощью схемы 44 обработки данных изображения, полученное в результате изображение сжимают с помощью схемы 45 сжатия/восстановления изображения в соответствии с форматом JPEG и полученное в результате сжатое изображение записывают в модуль 69 данных сжатого изображения с помощью контроллера 21 запоминающего устройства. Кроме того, миниатюрное изображение записывают в 1-е IFD 77 и данные величины дефокусирования записывают в области 85 записи данных, как показано в позиции 85a. Кроме того, различные типы установок камеры (например, скорость затвора, апертура и фокусное расстояние объектива) записывают в соответствии с правилами Exif и, таким образом, изображение и различные типы данных составляют в файл JPEG. На этапе S190 сигналы изображения, временно записанные в SDRAM 43, записывают в данные 96 RAW, как показано в позиции 96a с помощью контроллера 21 запоминающего устройства. Кроме того, различные типы установок камеры (например, скорость затвора, апертура и фокусное расстояние объектива) записывают во вспомогательной информации 93 изображения в соответствии с правилами Exif, миниатюрное изображение записывают в данные 95 миниатюрных изображений и, таким образом, из изображения и различных типов данных составляют файл RAW. На этапе S191 файл изображения, который представляет собой файл JPEG или файл RAW, записывают на носитель 48 информации. На этапе S192 затвор 5 закрывают с помощью схемы 27 управления затвором. На этапе S193 приводным двигателем зеркала (не показан) управляют с помощью схемы 26 управления двигателем и основное зеркало 4 и вспомогательное зеркало 7 переводят в нижнее положение зеркала (состояние, показанное на фиг.1). На этапе S194 подводом питания к двигателю заряда (не показан) управляют с помощью схемы 26 управления двигателем и затвор 5 заряжают. После этого обработка возвращается на этап S110 в основной процедуре по фиг.18. Как описано выше, в соответствии с настоящим вариантом осуществления возможно реализовать запись данных детектирования фокуса от момента, когда изображение было записано в файле изображения. Формат файла изображения в таком случае может представлять собой общий формат JPEG для файлов изображения или формат RAW, который позволяет пользователю получать еще более высококачественное изображение в результате выполнения обработки изображения в более позднее время. Хотя существует два формата файла изображения, а именно JPEG и RAW, в настоящем варианте осуществления настоящее изобретение не ограничено этим, и, например, можно использовать несжатый формат TIFF или другой формат. Кроме того, хотя было представлено описание, в котором как JPEG, так и RAW совместимы с форматом Exif, можно использовать любой формат, если только данные изображения (данные снятого изображения) и данные AF разности фаз в плоскости считывания изображения могут быть записаны в файле изображения. Кроме того, хотя данные AF разности фаз в плоскости считывания изображения, записанные в файл JPEG, представляют собой величины для дефокусирования в областях детектирования фокуса, диапазон, в котором рассчитывают величины дефокусирования, не ограничен областями детектирования фокуса, и, например, величина дефокусирования может быть рассчитана для каждой секции. Кроме того, данные AF по разности фаз в плоскости считывания изображения не ограничены величинами дефокусирования, но вместо этого могут представлять собой данные расстояния, обозначающие, например, расстояние от камеры до объекта, рассчитанные по информации, получаемой в фотообъективе 3, и величине дефокусирования. Кроме того, в файле RAW данные AF разности фаз в плоскости считывания изображения не записаны во вспомогательной информации 93 изображения, поскольку данные пикселя детектирования фокуса записаны в данных RAW, но может быть выполнена запись, аналогичная записи в файле JPEG. Кроме того, хотя функция модуля обработки изображения, который преобразует снятые данные изображения в файл изображения, и функция модуля записи данных, который записывает данные AF разности фаз в плоскости считывания изображения в файле изображения, реализованы с помощью одного модуля, а именно контроллера 21 запоминающего устройства, эти функции могут быть реализованы двумя или больше отдельными модулями. Настоящее изобретение применимо к устройству съемки изображения, в котором возможно AF на основе разности фаз с помощью датчика изображения, примеры которого включают в себя не только цифровую зеркальную фотокамеру с одним объективом, но также и цифровую компактную камеру, цифровую видеокамеру, различные типы цифровых камер для инспекции, цифровую камеру для наблюдения, эндоскопическую цифровую камеру и цифровую камеру для использования в робототехническом устройстве. Кроме того, компоновка составляющих элементов, цифровые значения и т.п., которые описаны в настоящем варианте осуществления, представляют собой просто примеры, и предполагается, что объем настоящего изобретения не ограничен ими. Ниже со ссылкой на чертежи представлен Вариант 2 осуществления настоящего изобретения. Описание основной конфигурации было исключено, поскольку она является той же, что и конфигурация Варианта 1 осуществления, показанная на фиг.1-3, и будут описаны только отличающиеся участки. На фиг.24 показана блок-схема последовательности операций, представляющая операции, выполняемые во время воспроизведения изображения в цифровой зеркальной камере с одним объективом в соответствии с Вариантом 2 осуществления. На этапе S201 кнопку 35 воспроизведения устанавливают в положении ВКЛЮЧЕНО, и камера переключается из режима съемки в режим воспроизведения изображения. На этапе S202 файл изображения, записанный на носителе 48 информации с помощью контроллера 21 запоминающего устройства, отображается на жидкокристаллическом мониторе 14. В настоящем варианте осуществления считается, что на носителе 48 информации записано изображение, показанное на фиг.15, которое было снято в режиме предварительного просмотра и записано как файл JPEG в Варианте 1 осуществления. На этапе S203 рамку AF, которую использовали при управлении фокусированием, выполняемым с помощью объектива, во время съемки изображения, отображают с наложением на изображение. Например, в случае изображения, снятого в нормальном режиме в Варианте 1 осуществления, отображают рамку AF, которая соответствует области, используемой, когда величины дефокусирования были рассчитаны с помощью датчика 8 AF. Кроме того, в случае изображения, снятого в режиме непосредственного обзора, отображают рамку AF, которая была установлена. Здесь отображение на жидкокристаллическом мониторе 14 является таким, как показано на фиг.15, и изображение было снято после выполнения управления фокусированием так, что величина дефокусирования в данной рамке AF равна "0". Кроме того, информация местоположения, относящаяся к этой рамке AF, была записана в области 85 записи данных и считана контроллером 21 запоминающего устройства. На этапе S204 выполняют операцию нажима с помощью мультиконтроллера 33, и начинается режим отображения информации дефокусирования. На этапе S205 рамку AF, отображаемую на жидкокристаллическом мониторе 14, удаляют. На этапе S206 отображают рамку области детектирования фокуса. В Варианте 1 осуществления область детектирования фокуса представляет собой одно поле, и величины дефокусирования для каждого поля записаны в файле JPEG, и поэтому в настоящем варианте осуществления размер рамки области детектирования фокуса, отображаемый на жидкокристаллическом мониторе 14, также равен одному полю. Местоположение рамки области детектирования фокуса, которая должна отображаться первой, представляет собой местоположение в рамке AF, где величина дефокусирования является наименьшей. На этапе S207 величину дефокусирования в местоположении отображаемой рамки области детектирования фокуса считывают из области 85 записи данных в файле 60 JPEG с помощью контроллера 21 запоминающего устройства и отображают на жидкокристаллическом мониторе 14. На фиг.25 представлено состояние жидкокристаллического монитора 14 в это время. На фиг.25 величину дефокусирования отображают в нижней правой части жидкокристаллического монитора 14. На этапе S208 определяют, была ли выполнена операция направленного ввода микроконтроллером 33, в результате чего обработка переходит на этап S209, если такая операция не была выполнена, и обработка переходит на этап S210, если такая операция была выполнена. На этапе S209 выполняют операцию с кнопкой функционирования или работы, не используемой в режиме воспроизведения (например, с пусковой кнопкой 30 или кнопкой 34 источника питания), и режим воспроизведения заканчивается. На этапе S210 рамку области детектирования фокуса перемещают в соответствии с операцией, выполняемой с мультиконтроллером 33. На этапе S211 величину дефокусирования в местоположении рамки области детектирования фокуса в месте назначения перемещения считывают из области 85 записи данных в файле 60 JPEG с помощью контроллера 21 запоминающего устройства и заменяют величиной дефокусирования из области перед перемещением, которая отображалась на жидкокристаллическом мониторе 14. После этого обработка снова возвращается на этап S208. Как описано выше, настоящий вариант осуществления обеспечивает возможность для пользователя легко проверять данные AF разности фаз в плоскости считывания изображения, записанные в файле изображения. Кроме того, в настоящем варианте осуществления для пользователя реализуется возможность проверки AF разности фаз в плоскости считывания изображения в произвольном положении изображения, если необходимо. Хотя управление для считывания и отображения данных AF разности фаз в плоскости считывания изображения выполняют с помощью камеры, которая снимает изображение, и жидкокристаллического монитора камеры, в настоящем варианте осуществления также возможна конфигурация, в которой такое управление и отображение выполняют с помощью программного обеспечения обработки файла JPEG, встроенного в устройство, которое может отображать изображения (например, персональный компьютер или принтер, имеющий паз для установки носителя информации). Кроме того, хотя данные AF разности фаз плоскости считывания изображения представляют величины дефокусирования в областях детектирования фокуса, области, в которых рассчитывают величины дефокусирования, не ограничиваются этими областями детектирования фокуса, и, например, величина дефокусирования может быть рассчитана для каждой секции. Кроме того, данные AF разности фаз плоскости считывания изображения не ограничены величинами дефокусирования, но вместо этого могут представлять собой данные расстояния, обозначающие, например, расстояние от камеры до объекта, рассчитанное по информации, относящейся к фотообъективу 3 и величинам дефокусирования. Кроме того, компоновка составляющих элементов, цифровых значений и т.п., которые описаны в настоящем варианте осуществления, представляет собой просто примеры, и предполагается, что объем настоящего изобретения не ограничен ими. Вариант 3 осуществления Ниже представлено описание Варианта 3 осуществления настоящего изобретения со ссылкой на фиг.26 и 27. На фиг.26 показана основная блок-схема последовательности операций, представляющая основные операции программного обеспечения обработки файла RAW в устройстве обработки изображения, которое не показано (считается, что оно представляет собой персональный компьютер в настоящем варианте осуществления). На фиг.27 показано состояние, в котором программное обеспечение 302 обработки файла RAW отображается на дисплее 301 персонального компьютера. На этапе S351 программное обеспечение 302 обработки файла RAW, установленное в персональном компьютере, запускают. Программное обеспечение 302 файла обработки RAW отображается на дисплее 301, как показано на фиг.27. На этапе S352 данные 95 миниатюрного изображения считывают из файла 90 RAW, записанного на HDD (НЖМД, накопитель на жестком магнитном диске) персонального компьютера или на носителе 48 информации, вставленном в паз для носителя информации персонального компьютера, и данные 95 миниатюрного изображения отображают в виде списка как миниатюрные изображения 304, показанные на фиг.27. На этапе S353 изображение, на котором может быть выполнена обработка различных типов, выбирают среди миниатюрных изображений 304. Например, выполняют операцию с мышью персонального компьютера для перемещения указателя 305 к изображению, которое должно быть выбрано среди миниатюрных изображений 304, и выполняют двойной щелчок мышью. На фиг.27 выбирают самое левое изображение (IMG_0001) среди миниатюрных изображений 304. На этапе S354 данные 96 RAW считывают из выбранного файла 90 RAW в запоминающее устройство в персональном компьютере и выполняют обработку интерполяции для фокусирования пикселей детектирования, которые представляют собой дефектные пиксели. Здесь запоминающее устройство в персональном компьютере имеет те же функции, что и SDRAM 43. Аналогично, функции MPU 20 и контроллера 21 запоминающего устройства выполняют с помощью CPU (ЦПУ, центральное процессорное устройство) персонального компьютера. Такую обработку интерполяции дефектных пикселей выполняют на основе информации 93a местоположения пикселей детектирования фокуса, записанной во вспомогательной информации 93 изображения. На этапе S355 считывают параметр 94 обработки из выбранного файла 90 RAW и изображение, полученное в результате выполнения интерполяции дефектных пикселей, обрабатывают в соответствии с этим параметром. На этапе S356 обработанное изображение RAW отображают как основное изображение 303. На этапе S357 вспомогательную информацию 93 изображения считывают из выбранного файла 90 RAW и отображают в области 306 вспомогательной информации. На этапе S358 кнопку 307 данных расстояния программного обеспечения 302 обработки файла RAW устанавливают в положение ВКЛЮЧЕНО. Например, указатель 305 перемещают на кнопку 307 данных расстояния и выполняют двойной щелчок. На этапе S359 рамку 309 расстояния отображают поверх основного изображения 303. Местоположение и размер рамки 309 расстояния, которая должна отображаться первой, соответствуют рамке AF, использовавшейся для управления фокусированием, выполнявшегося с помощью объектива во время съемки изображения. Здесь считается, что изображение представляет собой изображение в соответствии с Вариантом 1 осуществления, показанным на фиг.15, которое было снято в режиме предварительного просмотра, и рамку 309 расстояния отображают с тем же размером и в том же местоположении, что и рамка AF, установленная на фиг.15. Кроме того, информация, относящаяся к этой рамке AF, была записана во вспомогательной информации 93 изображении. На фиг.27 цвет знаков, отображаемых на кнопке 307 данных расстояния, инвертируют для обозначения того, что местоположение и размер рамки 309 расстояния могут быть изменены. На этапе S360 считывают данные пикселей детектирования фокуса, включенные в каждую область детектирования фокуса в рамке 309 расстояния. На этапе S361 пиксели детектирования фокуса в каждой секции суммируют вместе на основе структуры секции, описанной со ссылкой на фиг.10 или 12, и сигнал пикселя AF для каждой секции получают на основе результатов суммирования. На этапе S362 два сигнала изображения для расчета корреляции генерируют на основе сигналов пикселей AF. На этапе S363 выполняют операцию корреляции для двух полученных изображений и рассчитывают относительную величину дефокусирования между двумя изображениями. На этапе S364 рассчитывают величину дефокусирования. На этапе S365 отображают величину дефокусирования 308. На фиг.27 рамка 309 расстояния представляет собой ту же, что и рамка AF, установленная во время съемки, и поэтому отображаются "0 мм" как величина дефокусирования. На этапе S366 определяют, было ли изменено местоположение и размер рамки 309 расстояния. Если местоположение и размер были изменены, обработка переходит на этап S360, величину дефокусирования повторно рассчитывают в соответствии с измененными местоположением и размером и отображают величину дефокусирования (этап S360 - этап S365). Если местоположение и размер не изменились, обработка переходит на этап S367. В качестве одного примера способа изменения местоположения и размера рамки 309 расстояния, рамка 309 расстояния может быть перемещена в требуемое место на основном изображении 303 путем установки указателя 305 на линии рамки для рамки 309 расстояния и перетягивания ее. Кроме того, если указатель 305 поместить на один из четырех углов рамки 309 расстояния и выполнить перетягивание угла, только две линии рамки, составляющие этот угол, перемещаются, изменяя, таким образом, размер рамки 309 расстояния. Например, местоположение и размер рамки расстояния могут быть изменены, как обозначено рамкой 309a расстояния. На этапе S367 кнопку 307 данных расстояния устанавливают в положение ВЫКЛЮЧЕНО. При установке положения ВЫКЛЮЧЕНО рамка 309 расстояния удаляется из основного изображения 303. На этапе S368 определяют, были ли выполнены различные типы обработки изображения для основного изображения 303, в результате чего обработка переходит на этап S369, если обработка изображения была выполнена, и обработка переходит на этап S373, если обработка изображения не была выполнена. При обработке изображения, если кнопку 310 меню обработки изображения установить в положение включено, отображается экран меню (не показан), и элемент меню, который соответствует намерению пользователя, выбирают из экрана меню и выполняют. На этапе S369 кнопку 311 сохранения файла для сохранения изображения, в котором был выполнена различного типа обработка изображения, устанавливают в положение ВКЛЮЧЕНО. На этапе S370 выполняют процедуру записи сигнала пикселя AF. Подробное описание этой процедуры было исключено, поскольку она в основном представляет собой то же, что и поток операций процедуры записи сигнала пикселя AF в Варианте 1 осуществления, показанном на фиг.20 (этап S151-этап S156). В настоящем варианте осуществления функции, которые были описаны как выполняемые с помощью MPU 20 и контроллера 21 запоминающего устройства в описании со ссылкой на фиг.20, вместо этого выполняют с помощью CPU персонального компьютера и функции, которые были описаны как выполняемые с помощью SDRAM 43, вместо этого выполняют с помощью запоминающего устройства персонального компьютера. На этапе S371 изображение, в котором была выполнена обработка изображения, сжимают в соответствии с форматом JPEG и записывают в модуле 69 данных сжатого изображения. Кроме того, данные 95 миниатюрного изображения записывают в 1-м IFD 77 и величины данных дефокусирования записывают в область 85 записи данных, как обозначено позицией 85a. Кроме того, различные типы установок камеры (например, скорость затвора, апертура и фокусное расстояние объектива) записывают в соответствии с правилами Exif и, таким образом, из изображения и различных типов данных составляют файл JPEG. Хотя формат JPEG используют при формировании файла в приведенном выше описании, можно использовать формат TIFF или другой формат файла изображения. На этапе S372 файл изображения, из которого был составлен файл JPEG, записывают на носителе 48 или на HDD персонального компьютера. На этапе S373 определяют, была ли выполнена операция с кнопкой 312 окончания, в результате чего программное обеспечение 302 обработки файла RAW заканчивается, если такая операция была выполнена, и если такая операция не была выполнена, обработка переходит на этап S353, и после этого выполняется другая обработка изображения. Как описано выше, в соответствии с настоящим вариантом осуществления становится возможным обеспечить для пользователя возможность легко проверять данные AF разности фаз плоскости считывания изображения, записанные в файле изображения. Кроме того, в настоящем варианте осуществления реализуется возможность для пользователя проверить данные AF разности фаз плоскости считывания изображения в произвольном местоположении в изображении, если необходимо. Обработку для расчета и отображения данных AF разности фаз плоскости считывания изображения выполняют с помощью персонального компьютера и программного обеспечения обработки файла RAW, встроенного в персональный компьютер в соответствии с настоящим вариантом осуществления, любая форма возможна, если только используется цифровая камера или устройство, позволяющее отображать изображения. Кроме того, хотя данные AF разности фаз плоскости считывания изображения представляют собой величины дефокусирования в областях детектирования фокуса, протяженность, в которой рассчитывают величины дефокусирования, не ограничивается областями детектирования фокуса, и, например, величина дефокусирования может быть рассчитана для каждой секции. Кроме того, данные AF разности фаз плоскости считывания изображения не ограничиваются величинами дефокусирования, но вместо этого могут представлять собой данные расстояния, обозначающие, например, расстояние от камеры до объекта, рассчитанное по информации, относящейся к фотообъективу 3 и величинам дефокусирования. Кроме того, размещение составляющих элементов, цифровые значения и т.п., которые описаны в настоящем варианте осуществления, представляют собой просто примеры, и предполагается, что объем настоящего изобретения не ограничивается этим. Хотя настоящее изобретение было описано со ссылкой на примерные варианты осуществления, следует понимать, что изобретение не ограничено раскрытыми примерными вариантами осуществления. Объем следующей формулы изобретения должен соответствовать самой широкой интерпретации для охвата всех таких модификаций и эквивалентных структур и функций. По данной заявке испрашивается преимущество заявки на японский патент № 2008-292610, поданной 14 ноября 2008, которая тем самым включена в настоящее описание в качестве ссылки.
Реферат
Изобретение относится к устройствам съемки изображений с автофокусированием на основе разности фаз в плоскости считывания изображения. Устройство включает в себя датчик изображения, в котором группы пикселей выполняют фотоэлектрическое преобразование объекта изображения из области выходного зрачка. Модуль детектирования фокуса выполняет расчет дефокусирования на основе сигналов изображения, полученных от нескольких групп пикселей. Модуль обработки изображения преобразует данные снятого изображения в файл изображения для записи и сохранения. Модуль записи данных записывает, в ассоциации с файлом изображения, сигналы, полученные из групп пикселей, таким образом, что может быть выполнен расчет дефокусирования. Технический результат - обеспечение записи в файле изображения точки детектирования фокуса и данных детектирования фокуса, полученных в момент съемки изображения, обеспечение возможности использования данных детектирования фокуса пользователем. 12 з.п. ф-лы, 30 ил.
Формула
датчик изображения, имеющий первую группу пикселей, которая выполняет фотоэлектрическое преобразование изображения объекта из первой области выходного зрачка, которая представляет собой часть общей области выходного зрачка фотообъектива, вторую группу пикселей, которая выполняет фотоэлектрическое преобразование изображения объекта из второй области выходного зрачка, которая отличается от первой области выходного зрачка, и третью группу пикселей, предназначенную для съемки, в которой происходит фотоэлектрическое преобразование изображения объекта из области выходного зрачка, которая включает в себя первую область выходного зрачка и вторую область выходного зрачка;
модуль детектирования фокуса, который детектирует информацию фокуса фотообъектива путем выполнения расчета дефокусирования, используя первый сигнал изображения, полученный из первой группы пикселей, и второй сигнал изображения, полученный из второй группы пикселей; модуль обработки изображения, который преобразует данные снятого изображения, для которых было выполнено фотоэлектрическое преобразование с помощью, по меньшей мере, третьей группы пикселей датчика изображения и захват в файл изображения для записи и сохранения; и
модуль записи данных, который записывает в ассоциации с файлом изображения сигналы, полученные из первой группы пикселей и второй группы пикселей таким образом, что может быть выполнен расчет дефокусирования.
в котором данные снятого изображения и сигналы, полученные из первой группы пикселей и второй группы пикселей таким образом, что может быть выполнен расчет дефокусирования, записывают в одной и той же области в файле изображения.
в котором данные снятого изображения и сигналы, полученные из первой группы пикселей и второй группы пикселей таким образом, что может быть выполнен расчет дефокусирования, записывают в разных областях в файле изображения.
в котором данные снятого изображения представляют собой данные RAW, полученные в результате A/D преобразования выходного сигнала от датчика изображения.
в котором данные снятого изображения представляют собой данные изображения, полученные в результате выполнения A/D преобразования сигнала, выводимого из датчика изображения и после этого выполнения обработки изображения для полученного в результате сигнала в соответствии со значением установки устройства съемки изображения.
в котором данные изображения представляют собой данные изображения, в которых была выполнена обработка сжатия.
в котором данные изображения представляют собой данные изображения, для которых не была выполнена обработка сжатия.
в котором выходные данные первой группы пикселей и второй группы пикселей были записаны в данные RAW.
в котором сигналы, полученные из первой группы пикселей и второй группы пикселей так, что можно выполнить расчет дефокусирования, представляют собой величины дефокусирования, которые были рассчитаны из выходных данных первой группы пикселей и второй группы пикселей.
в котором сигналы, полученные из первой группы пикселей и второй группы пикселей так, что можно выполнить расчет дефокусирования, представляют собой данные расстояния, которые были рассчитаны по выходным данным первой группы пикселей и второй группы пикселей.
в котором данные детектирования записывают в области записи приложенной информации, в файле изображения в формате Exif.
в котором информацию о местоположении первой группы пикселей и второй группы пикселей записывают в файл изображения.
в котором информацию о местоположении первой группы пикселей и второй группы пикселей записывают в области записи приложенной информации, в файл изображения в формате Exif.
Комментарии