Способ и устройство для позиционирования и навигации - RU2608971C1
Код документа: RU2608971C1
Чертежи


Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Данная заявка основана и притязает на приоритет заявки на патент (Китай) номер 201410126006.3, поданной 31 марта 2014 года, содержимое которой полностью содержится в данном документе по ссылке.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение относится к области техники картографического позиционирования, а более конкретно, к способу и устройству для позиционирования и навигации.
УРОВЕНЬ ТЕХНИКИ
[0003] В повседневной жизни и на работе, люди обычно используют некоторые приложения, имеющие функцию картографического позиционирования, для того чтобы определять географическую позицию, в которой они расположены, и географическую позицию пункта назначения, который должен быть достигнут, и стремятся получать маршрут для достижения пункта назначения.
[0004] В предшествующем уровне техники, предусмотрен способ для позиционирования и навигации, в котором информация координат текущей позиции пользователя сначала получается посредством таких способов позиционирования, как GPS (глобальная система позиционирования), базовая станция или Wi-Fi (стандарт высококачественной беспроводной связи); затем принимается целевой ввод пользователем, и получается информация координат пункта назначения; и после этого маршрут для достижения пункта назначения определяется на основе информации координат текущей позиции и информации координат пункта назначения. В способе для позиционирования и навигации, чтобы разрешать такую проблему, что пользователи, имеющие плохое чувство направления, не могут отличать ориентации на восток, юг, запад и север в окружающей обстановке, так что они не могут достигать пункта назначения согласно предоставленному маршруту, ориентация пользователя может получаться посредством гироскопа или электронного компаса и сообщаться пользователю после вышеуказанных трех этапов. Таким образом, пользователь может быть направлен таким образом, что он поворачивается в направлении по маршруту, с тем чтобы успешно достигать пункта назначения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] Чтобы разрешать такую проблему в предшествующем уровне техники, что вес, размеры и стоимость изготовления электронного устройства увеличиваются вследствие использования аппаратных средств, таких как гироскоп или электронный компас, чтобы получать ориентацию пользователя, варианты осуществления настоящего изобретения предоставляют способ и устройство для позиционирования и навигации. Технические решения заключаются в следующем.
[0006] Согласно первому аспекту вариантов осуществления настоящего изобретения, предусмотрен способ для позиционирования и навигации, включающий в себя:
[0007] - получение начальной координаты пользователя;
[0008] - получение предварительно установленного числа изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, и получение абсолютной координаты, соответствующей каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами;
[0009] - получение относительной позиции между объектом в изображении окружения и пользователем для каждого изображения окружения; и
[0010] - определение информации текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты.
[0011] Необязательно, упомянутая информация текущей географической позиции определения пользователя на основе относительной позиции и абсолютной координаты включает в себя:
[0012] - когда число изображений окружения равно 1, определение текущей ориентации пользователя на основе относительной позиции, абсолютной координаты и начальной координаты и определение начальной координаты в качестве фактической координаты пользователя;
[0013] - когда число изображений окружения равно 2, определение текущей ориентации и фактической координаты пользователя на основе относительной позиции, абсолютной координаты и начальной координаты; и
[0014] - когда число изображений окружения равно 3 или больше, определение текущей ориентации и фактической координаты пользователя на основе относительной позиции и абсолютной координаты.
[0015] Необязательно, когда число изображений окружения равно 1, определение текущей ориентации пользователя на основе относительной позиции, абсолютной координаты и начальной координаты включает в себя:
[0016] - получение опорного направления от координатной точки A начальной координаты к координатной точке B абсолютной координаты; и
[0017] - определение ориентации на основе опорного направления и относительной позиции.
[0018] Необязательно, когда число изображений окружения равно 2, определение текущей ориентации и фактической координаты пользователя на основе относительной позиции, абсолютной координаты и начальной координаты включает в себя:
[0019] - получение прямой линии AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате; определение фактической координаты на основе второй координатной точки B2 в абсолютной координате, прямой линии AB1 и двух относительных позиций, полученных для двух изображений окружения; и определение ориентации на основе фактической координаты и, по меньшей мере, одной из относительных позиций;
[0020] - или
[0021] - получение прямой линии AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате, и прямой линии AB2, которая проходит через координатную точку A начальной координаты и вторую координатную точку B2 в абсолютной координате, соответственно; определение ориентации на основе прямой линии AB1, прямой линии AB2 и двух относительных позиций, полученных для двух изображений окружения; и определение фактической координаты на основе ориентации и, по меньшей мере, одной из относительных позиций.
[0022] Необязательно, когда число изображений окружения равно 3, определение текущей ориентации и фактической координаты пользователя на основе относительной позиции и абсолютной координаты включает в себя:
[0023] - получение прямой линии AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате, прямой линии AB2, которая проходит через координатную точку A начальной координаты и вторую координатную точку B2 в абсолютной координате, и прямой линии AB3, которая проходит через координатную точку A начальной координаты и третью координатную точку B3 в абсолютной координате, соответственно;
[0024] - определение ориентации на основе прямой линии AB1, прямой линии AB2, прямой линии AB3 и трех относительных позиций, полученных для трех изображений окружения; и
[0025] - определение фактической координаты на основе ориентации и, по меньшей мере, одной из относительных позиций.
[0026] Необязательно, когда число изображений окружения равно 3, определение текущей ориентации и фактической координаты пользователя на основе относительной позиции и абсолютной координаты включает в себя:
[0027] - обнаружение то, удовлетворяют или нет три относительных позиции, полученные для трех изображений окружения, предварительно установленному условию, которое представляет собой следующее: одна из относительных позиций представляет собой то, что объект находится непосредственно перед пользователем, другая из относительных позиций представляет собой то, что объект находится непосредственно слева от пользователя, и еще одна из относительных позиций представляет собой то, что объект находится непосредственно справа от пользователя;
[0028] - если обнаруживается то, что предварительно установленное условие удовлетворяется, получение прямой линии B2B3, которая проходит через координатную точку B2, соответствующую абсолютной координате объекта с относительной позицией непосредственно слева от пользователя, и координатную точку B3, соответствующую абсолютной координате объекта с относительной позицией непосредственно справа от пользователя;
[0029] - получение вертикальной линии B1S между координатной точкой B1, соответствующей абсолютной координате объекта с относительной позицией непосредственно перед пользователем, и прямой линией B2B3; и
[0030] - определение координаты основания S перпендикуляра в качестве фактической координаты и определение направления от основания S перпендикуляра к координатной точке B1 в качестве ориентации.
[0031] Необязательно, упомянутое получение предварительно установленного числа изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, включает в себя:
[0032] - получение m возможных вариантов изображений в пределах предварительно установленного географического диапазона, соответствующего начальной координате; и
[0033] - выбор изображений окружения в предварительно установленном числе n из m возможных вариантов изображений;
[0034] - где m≥n>0.
[0035] Необязательно, упомянутый выбор изображений окружения в предварительно установленном числе n из m возможных вариантов изображений включает в себя:
[0036] - упорядочение m возможных вариантов изображений согласно предварительно установленному приоритету, с тем чтобы получать последовательность возможных вариантов изображений, и выбор изображений окружения в предварительно установленном числе n из последовательности возможных вариантов изображений;
[0037] - или
[0038] - отображение части или всех из m возможных вариантов изображений, прием сигнала выбора, соответствующего возможным вариантам изображений, и определение изображений окружения в предварительно установленном числе n согласно сигналу выбора.
[0039] Необязательно, упомянутое получение относительной позиции между объектом в изображении окружения и пользователем включает в себя:
[0040] - отображение изображения окружения и направляющей информации, причем направляющая информация выполнена с возможностью направлять пользователя таким образом, что он находится лицом к объекту в изображении окружения, и/или направлять пользователя таким образом, чтобы перемещать изображение окружения в соответствующем направлении согласно относительной позиции между объектом в изображении окружения и самим пользователем, и/или направлять пользователя таким образом, чтобы перемещать изображение окружения в соответствующую позицию согласно относительной позиции между объектом в изображении окружения и самим пользователем;
[0041] - прием входного сигнала, инициированного пользователем согласно направляющей информации; и
[0042] - определение относительной позиции между объектом в изображении окружения и пользователем согласно входному сигналу.
[0043] Необязательно, способ дополнительно включает в себя:
[0044] - получение координаты назначения для пункта назначения, который должен быть достигнут пользователем;
[0045] - определение, по меньшей мере, одного маршрута на основе координаты назначения и информации географической позиции; и
[0046] - отображение информации географической позиции, координаты назначения и маршрута.
[0047] Согласно второму аспекту вариантов осуществления настоящего изобретения, предусмотрено устройство для позиционирования и навигации, которое включает в себя:
[0048] - модуль получения начальных координат, выполненный с возможностью получать начальную координату пользователя;
[0049] - модуль получения изображений, выполненный с возможностью получать предварительно установленное число изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, и получать абсолютную координату, соответствующую каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами;
[0050] - модуль получения позиции, выполненный с возможностью получать относительную позицию между объектом в изображении окружения и пользователем для каждого изображения окружения; и
[0051] - модуль картографического позиционирования, выполненный с возможностью определять информацию текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты.
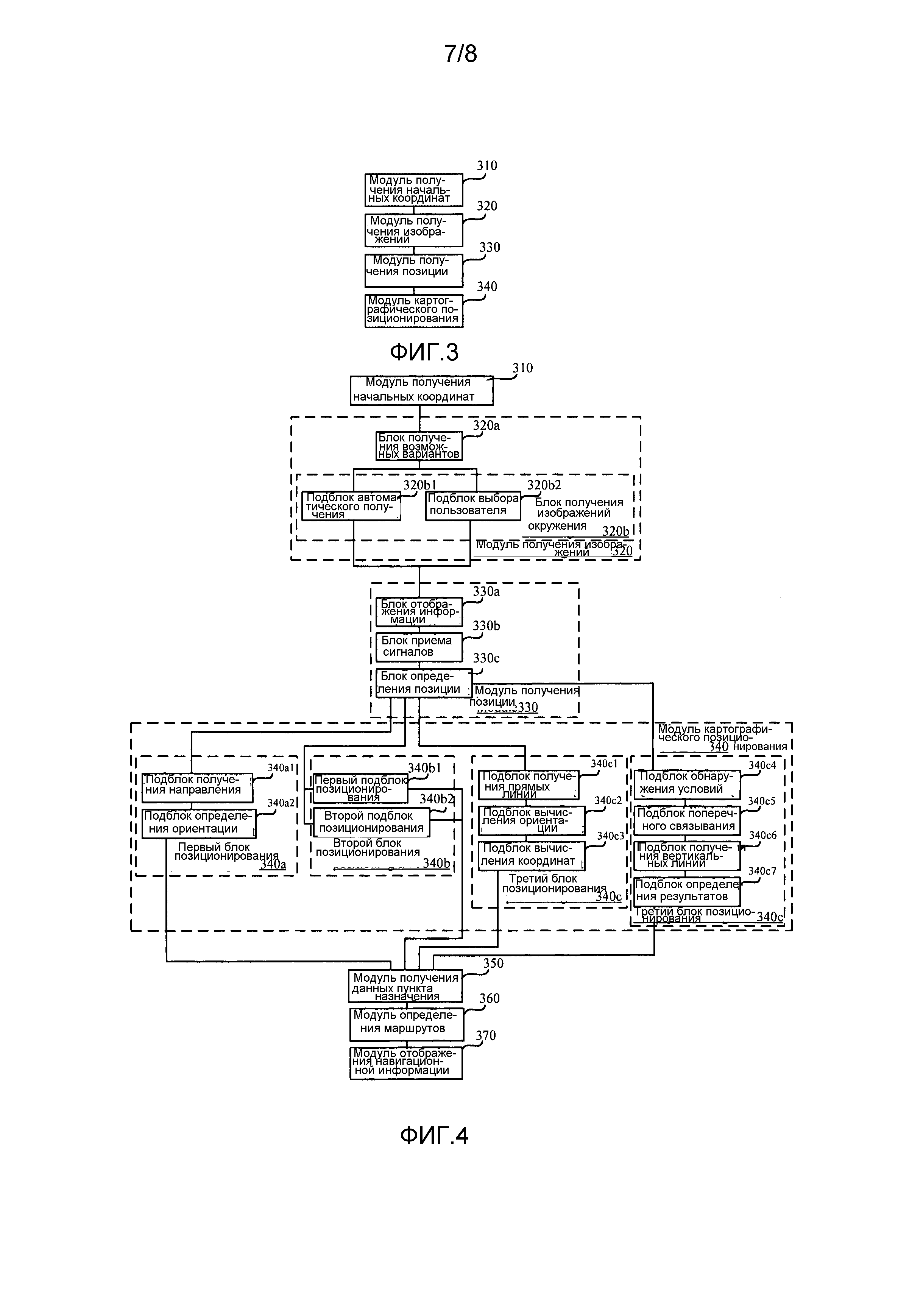
[0052] Необязательно, модуль картографического позиционирования включает в себя первый блок позиционирования и/или второй блок позиционирования, и/или третий блок позиционирования;
[0053] - первый блок позиционирования выполнен с возможностью, когда число изображений окружения равно 1, определять текущую ориентацию пользователя на основе относительной позиции, абсолютной координаты и начальной координаты и определять начальную координату в качестве фактической координаты пользователя;
[0054] - второй блок позиционирования выполнен с возможностью, когда число изображений окружения равно 2, определять текущую ориентацию и фактическую координату пользователя на основе относительной позиции, абсолютной координаты и начальной координаты; и
[0055] - третий блок позиционирования выполнен с возможностью, когда число изображений окружения равно 3 или больше, определять текущую ориентацию и фактическую координату пользователя на основе относительной позиции и абсолютной координаты.
[0056] Необязательно, первый блок позиционирования включает в себя подблок получения направления и подблок определения ориентации;
[0057] - подблок получения направления выполнен с возможностью получать опорное направление от координатной точки A начальной координаты к координатной точке B абсолютной координаты; и
[0058] - подблок определения ориентации выполнен с возможностью определять ориентацию на основе опорного направления и относительной позиции.
[0059] Необязательно, второй блок позиционирования включает в себя первый подблок позиционирования или второй подблок позиционирования;
[0060] - первый подблок позиционирования выполнен с возможностью получать прямую линию AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате; определять фактическую координату на основе второй координатной точки B2 в абсолютной координате, прямой линии AB1 и двух относительных позиций, полученных для двух изображений окружения; и определять ориентацию на основе фактической координаты и, по меньшей мере, одной из относительных позиций; и
[0061] - второй подблок позиционирования выполнен с возможностью получать прямую линию AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате, и прямую линию AB2, которая проходит через координатную точку A начальной координаты и вторую координатную точку B2 в абсолютной координате, соответственно; определять ориентацию на основе прямой линии AB1, прямой линии AB2 и двух относительных позиций, полученных для двух изображений окружения; и определять фактическую координату на основе ориентации и, по меньшей мере, одной из относительных позиций.
[0062] Необязательно, третий блок позиционирования включает в себя подблок получения прямых линий, подблок вычисления ориентации и подблок вычисления координат;
[0063] - подблок получения прямых линий выполнен с возможностью получать прямую линию AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате, прямую линию AB2, которая проходит через координатную точку A начальной координаты и вторую координатную точку B2 в абсолютной координате, и прямую линию AB3, которая проходит через координатную точку A начальной координаты и третью координатную точку B3 в абсолютной координате, соответственно;
[0064] - подблок вычисления ориентации выполнен с возможностью определять ориентацию на основе прямой линии AB1, прямой линии AB2, прямой линии AB3 и трех относительных позиций, полученных для трех изображений окружения; и
[0065] - подблок вычисления координат выполнен с возможностью определять фактическую координату на основе ориентации и, по меньшей мере, одной из относительных позиций.
[0066] Необязательно, третий блок позиционирования включает в себя подблок обнаружения условий, подблок поперечного связывания, подблок получения вертикальных линий и подблок определения результатов;
[0067] - подблок обнаружения условий выполнен с возможностью обнаруживать то, удовлетворяют или нет три относительных позиции, полученные для трех изображений окружения, предварительно установленному условию, которое представляет собой следующее: одна из относительных позиций представляет собой то, что объект находится непосредственно перед пользователем, другая из относительных позиций представляет собой то, что объект находится непосредственно слева от пользователя, и еще одна из относительных позиций представляет собой то, что объект находится непосредственно справа от пользователя;
[0068] - подблок поперечного связывания выполнен с возможностью, если обнаруживается то, что предварительно установленное условие удовлетворяется, получать прямую линию B2B3, которая проходит через координатную точку B2, соответствующую абсолютной координате объекта с относительной позицией непосредственно слева от пользователя, и координатную точку B3, соответствующую абсолютной координате объекта с относительной позицией непосредственно справа от пользователя;
[0069] - подблок получения вертикальных линий выполнен с возможностью получать вертикальную линию B1S между координатной точкой B1, соответствующей абсолютной координате объекта с относительной позицией непосредственно перед пользователем, и прямой линией B2B3; и
[0070] - подблок определения результатов выполнен с возможностью определять координату основания S перпендикуляра в качестве фактической координаты и определять направление от основания S перпендикуляра к координатной точке B1 в качестве ориентации.
[0071] Необязательно, модуль получения изображений включает в себя блок получения возможных вариантов и блок получения изображений окружения;
[0072] - блок получения возможных вариантов выполнен с возможностью получать m возможных вариантов изображений в пределах предварительно установленного географического диапазона, соответствующего начальной координате; и
[0073] - блок получения изображений окружения выполнен с возможностью выбирать изображения окружения в предварительно установленном числе n из m возможных вариантов изображений;
[0074] - где m≥n>0.
[0075] Необязательно, блок получения изображений окружения включает в себя подблок автоматического получения или подблок выбора пользователя;
[0076] - подблок автоматического получения выполнен с возможностью упорядочивать m возможных вариантов изображений согласно предварительно установленному приоритету, с тем чтобы получать последовательность возможных вариантов изображений, и выбирать изображения окружения в предварительно установленном числе n из последовательности возможных вариантов изображений; и
[0077] - подблок выбора пользователя выполнен с возможностью отображать часть или все из m возможных вариантов изображений, принимать сигнал выбора, соответствующий возможным вариантам изображений, и определять изображения окружения в предварительно установленном числе n согласно сигналу выбора.
[0078] Необязательно, модуль получения позиции включает в себя блок отображения информации, блок приема сигналов и блок определения позиции;
[0079] - блок отображения информации выполнен с возможностью отображать изображение окружения и направляющую информацию, причем направляющая информация выполнена с возможностью направлять пользователя таким образом, что он находится лицом к объекту в изображении окружения, и/или направлять пользователя таким образом, чтобы перемещать изображение окружения в соответствующем направлении согласно относительной позиции между объектом в изображении окружения и самим пользователем, и/или направлять пользователя таким образом, чтобы перемещать изображение окружения в соответствующую позицию согласно относительной позиции между объектом в изображении окружения и самим пользователем;
[0080] - блок приема сигналов выполнен с возможностью принимать входной сигнал, инициированный пользователем согласно направляющей информации; и
[0081] - блок определения позиции выполнен с возможностью определять относительную позицию между объектом в изображении окружения и пользователем согласно входному сигналу.
[0082] Необязательно, устройство дополнительно включает в себя:
[0083] - модуль получения данных пункта назначения, выполненный с возможностью получать координату назначения для пункта назначения, который должен быть достигнут пользователем;
[0084] - модуль определения маршрутов, выполненный с возможностью определять, по меньшей мере, один маршрут на основе координаты назначения и информации географической позиции; и
[0085] - модуль отображения навигационной информации, выполненный с возможностью отображать информацию географической позиции, координату назначения и маршрут.
[0086] Согласно третьему аспекту вариантов осуществления настоящего изобретения, предусмотрено устройство для позиционирования и навигации, которое включает в себя:
[0087] - процессор; и
[0088] - запоминающее устройство для сохранения инструкций, выполняемых посредством процессора;
[0089] - при этом процессор выполнен с возможностью:
[0090] - получать начальную координату пользователя;
[0091] - получать предварительно установленное число изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, и получать абсолютную координату, соответствующую каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами;
[0092] - получать относительную позицию между объектом в изображении окружения и пользователем для каждого изображения окружения; и
[0093] - определять информацию текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты.
[0094] Технические решения, предоставленные посредством вариантов осуществления настоящего изобретения, позволяют достигать следующих преимуществ.
[0095] Посредством получения начальной координаты пользователя, получения предварительно установленного числа изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, и получения абсолютной координаты, соответствующей каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами, получения относительной позиции между объектом в изображении окружения и пользователем для каждого изображения окружения и определения информации текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты, разрешается такая проблема в предшествующем уровне техники, что вес, размеры и стоимость изготовления электронного устройства увеличиваются вследствие использования аппаратных компонентов, таких как гироскоп или электронный компас, для того чтобы получать ориентацию пользователя. В технических решениях, предоставленных посредством вариантов осуществления настоящего изобретения, информация географической позиции, включающая в себя ориентацию пользователя, может получаться без установки аппаратных компонентов, таких как гироскоп или электронный компас, внутри электронного устройства, за счет чего могут уменьшаться вес и размеры электронного устройства, и может сокращаться стоимость изготовления.
[0096] Следует понимать, что как вышеприведенное общее описание, так и нижеприведенное подробное описание являются только примерными и пояснительными, а не ограничивающими изобретение согласно формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0097] Чтобы более ясно пояснять варианты осуществления настоящего изобретения, ниже приводится простое введение для чертежей, используемых для описания вариантов осуществления. Очевидно, что прилагаемые чертежи иллюстрируют только некоторые варианты осуществления настоящего изобретения, и другие чертежи могут получаться специалистами в данной области техники согласно этим чертежам без изобретательских усилий.
[0098] Фиг. 1 является иллюстративной блок-схемой последовательности операций, показывающей способ для позиционирования и навигации согласно примерному варианту осуществления;
[0099] Фиг. 2A является иллюстративной блок-схемой последовательности операций, показывающей способ для позиционирования и навигации согласно другому примерному варианту осуществления;
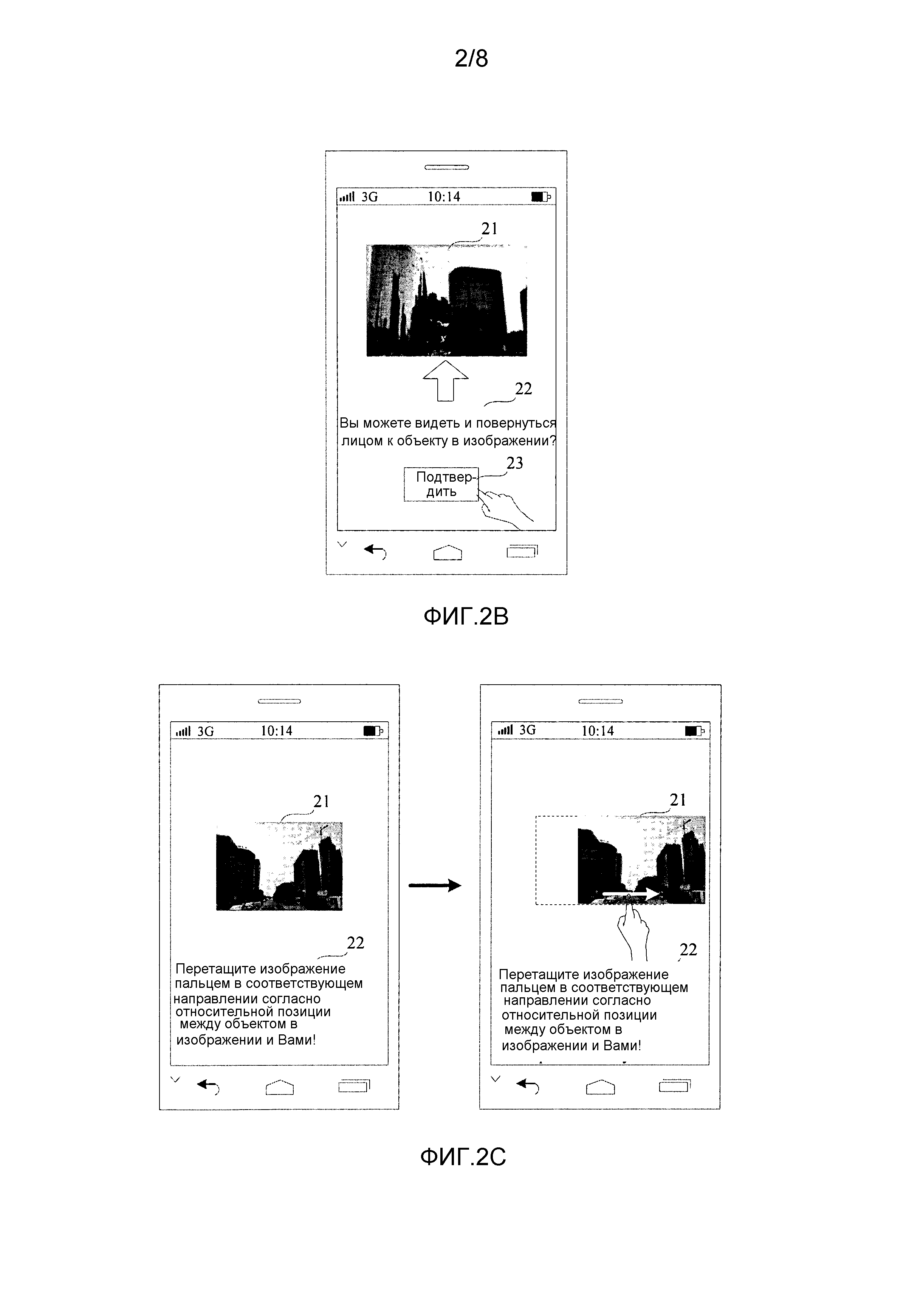
[00100] Фиг. 2B является блок-схемой, предусмотренной при получении относительной позиции в способе для позиционирования и навигации согласно другому примерному варианту осуществления;
[00101] Фиг. 2C является другой блок-схемой, предусмотренной при получении относительной позиции в способе для позиционирования и навигации согласно другому примерному варианту осуществления;
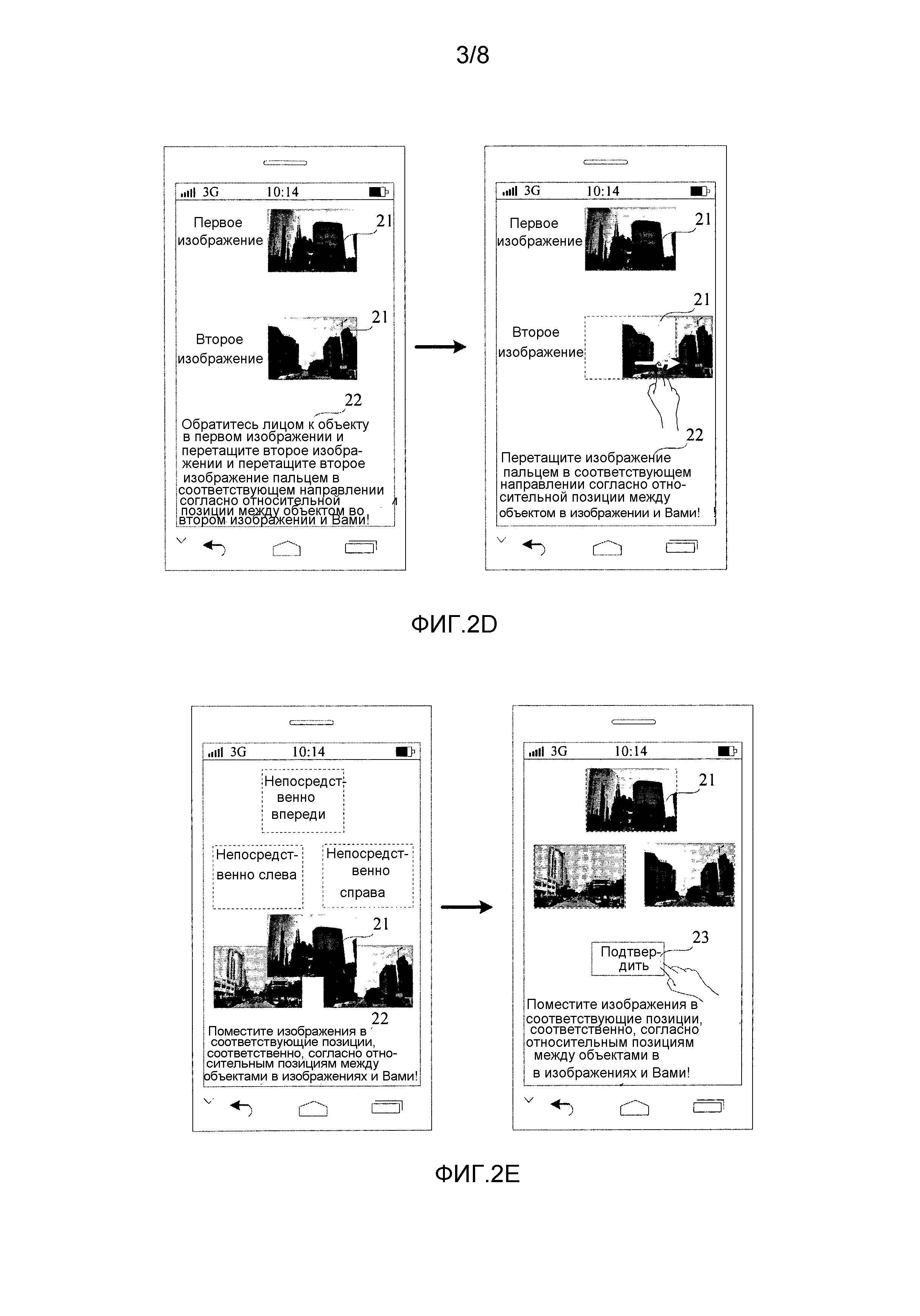
[00102] Фиг. 2D является еще одной другой блок-схемой, предусмотренной при получении относительной позиции в способе для позиционирования и навигации согласно другому примерному варианту осуществления;
[00103] Фиг. 2E является еще одной другой блок-схемой, предусмотренной при получении относительной позиции в способе для позиционирования и навигации согласно другому примерному варианту осуществления;
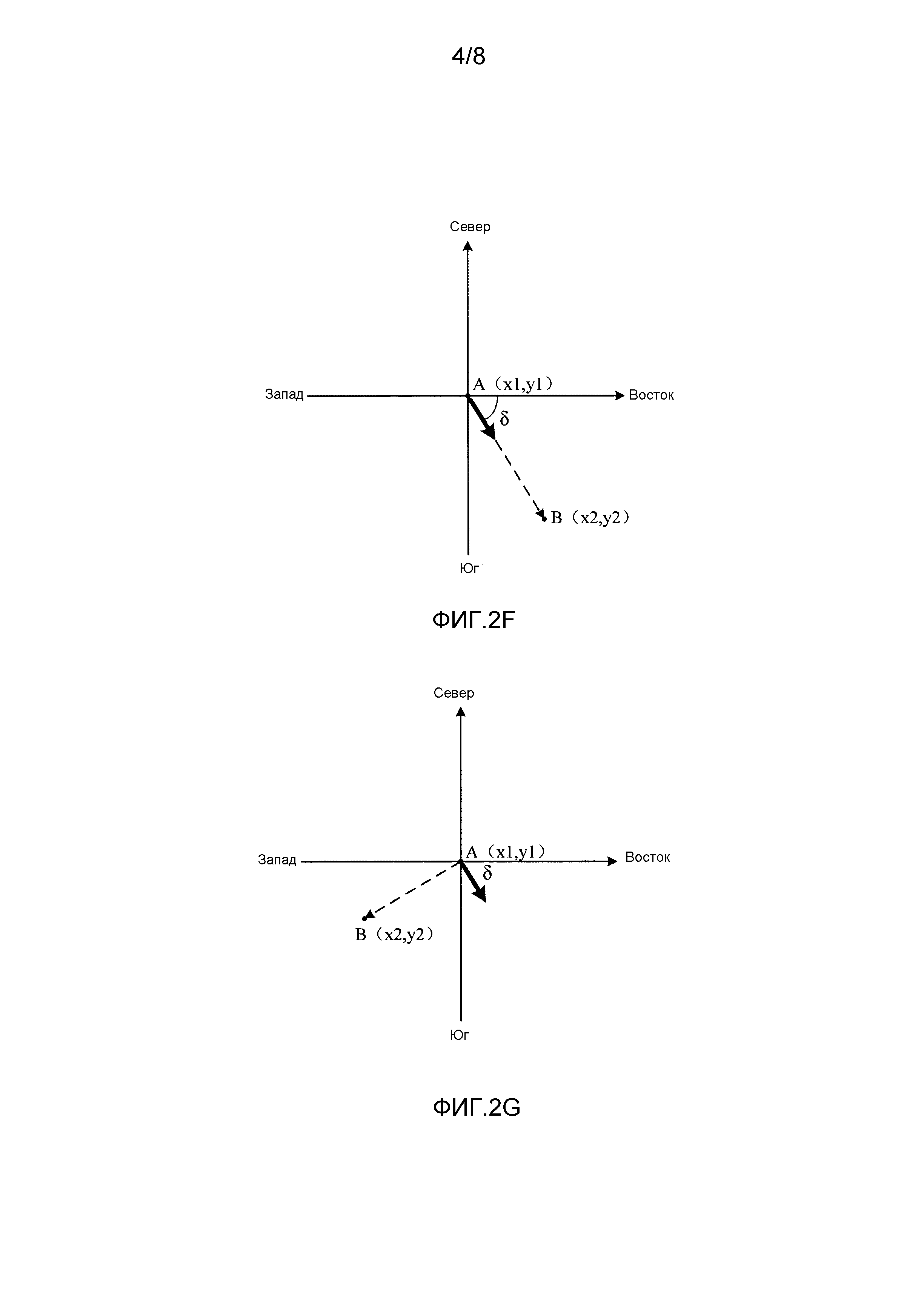
[00104] Фиг. 2F является блок-схемой, предусмотренной при вычислении информации географической позиции в способе для позиционирования и навигации согласно другому примерному варианту осуществления;
[00105] Фиг. 2G является другой блок-схемой, предусмотренной при вычислении информации географической позиции в способе для позиционирования и навигации согласно другому примерному варианту осуществления;
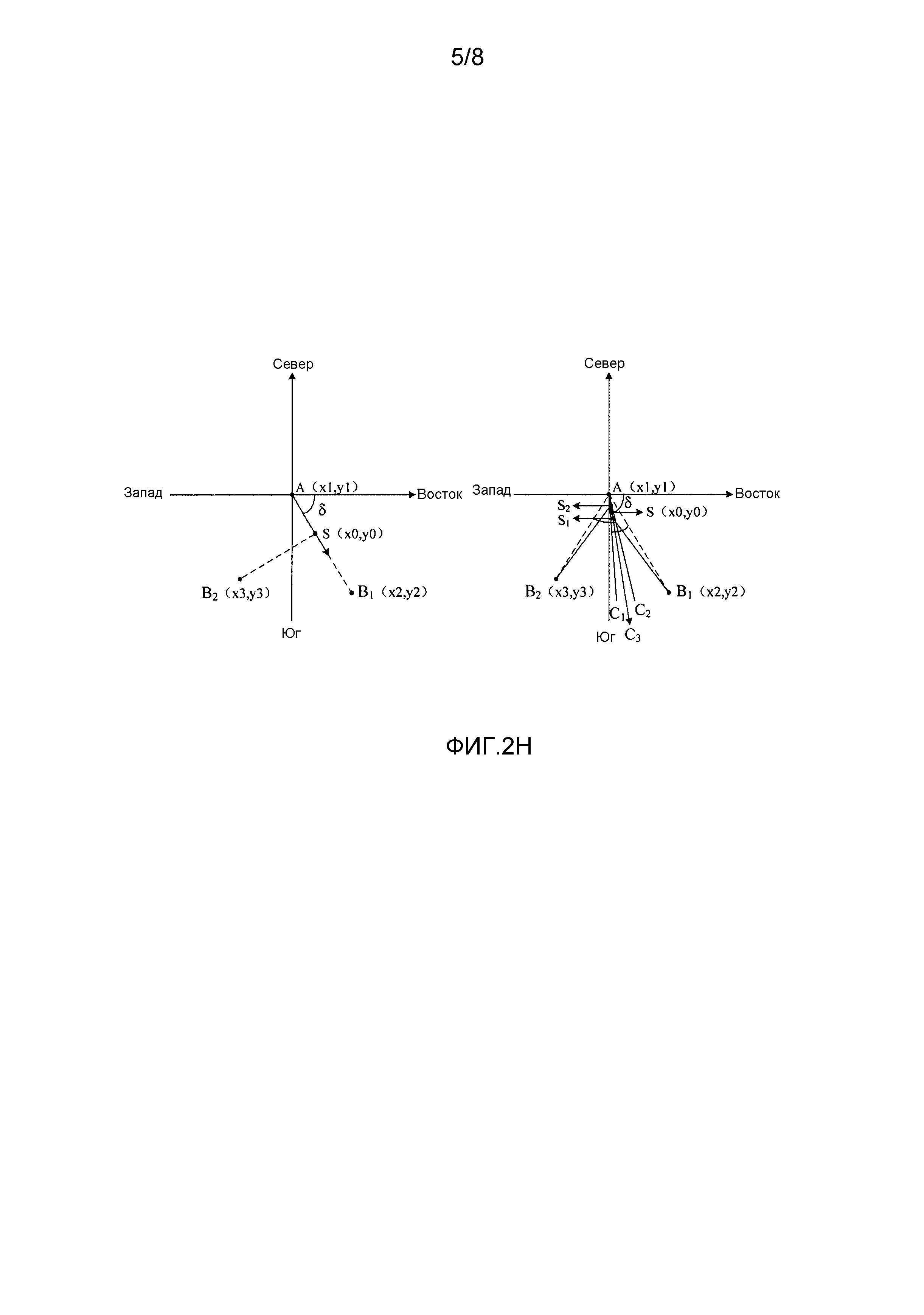
[00106] Фиг. 2H является еще одной другой блок-схемой, предусмотренной при вычислении информации географической позиции в способе для позиционирования и навигации согласно другому примерному варианту осуществления;
[00107] Фиг. 2I является еще одной другой блок-схемой, предусмотренной при вычислении информации географической позиции в способе для позиционирования и навигации согласно другому примерному варианту осуществления;
[00108] Фиг. 3 является блок-схемой, показывающей устройство для позиционирования и навигации согласно примерному варианту осуществления;
[00109] Фиг. 4 является блок-схемой, показывающей устройство для позиционирования и навигации согласно другим примерным вариантам осуществления; и
[00110] Фиг. 5 является блок-схемой, показывающей устройство для позиционирования и навигации согласно примерному варианту осуществления.
[00111] Конкретные варианты осуществления в этом раскрытии сущности показаны в качестве примера на вышеприведенных чертежах и далее подробно описываются. Чертежи и письменное описание не имеют намерение каким-либо образом ограничивать объем принципов настоящего изобретения. Наоборот, они предоставляются для того, чтобы иллюстрировать принципы настоящего изобретения и для специалистов в данной области техники со ссылкой на конкретные варианты осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[00112] Чтобы обеспечивать большую понятность целей, технических решений и преимуществ настоящего изобретения, настоящее изобретение подробнее описывается со ссылкой на прилагаемые чертежи. Очевидно, что описанные варианты осуществления представляют собой только часть, а не все варианты осуществления настоящего изобретения. На основе вариантов осуществления в настоящем раскрытии сущности, все другие варианты осуществления, которые могут получаться специалистами в данной области техники в этой области техники без изобретательских усилий, принадлежат объему настоящего изобретения.
[00113] Во-первых, следует указать, что в соответствующих вариантах осуществления настоящего изобретения, приспосабливаемое электронное устройство может представлять собой мобильный телефон, планшетный компьютер, устройство для чтения электронных книг, проигрыватель по стандарту MP3 (стандарту уровня 3 Экспертной группы по киноизображению), проигрыватель по стандарту MP4 (стандарту уровня 4 Экспертной группы по киноизображению), переносной портативный компьютер, настольный компьютер и т.п.
[00114] Фиг. 1 является блок-схемой последовательности операций, показывающей способ для позиционирования и навигации согласно примерному варианту осуществления. Настоящий вариант осуществления иллюстрируется посредством применения способа для позиционирования и навигации к электронному устройству. Способ для позиционирования и навигации может включать в себя следующие этапы.
[00115] На этапе 102, получается начальная координата пользователя.
[00116] На этапе 104, получается предварительно установленное число изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, и получается абсолютная координата, соответствующая каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами.
[00117] На этапе 106, получается относительная позиция между объектом в изображении окружения и пользователем для каждого изображения окружения.
[00118] На этапе 108, определяется информация текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты.
[00119] Если обобщать, в способе для позиционирования и навигации, предоставленном посредством настоящего варианта осуществления, посредством получения начальной координаты пользователя, получения предварительно установленного числа изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, и получения абсолютной координаты, соответствующей каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами, получения относительной позиции между объектом в изображении окружения и пользователем для каждого изображения окружения и определения информации текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты, разрешается такая проблема в предшествующем уровне техники, что вес, размеры и стоимость изготовления электронного устройства увеличиваются вследствие использования аппаратных компонентов, таких как гироскоп или электронный компас, для того чтобы получать ориентацию пользователя. В способе для позиционирования и навигации, предоставленном посредством настоящего варианта осуществления, информация географической позиции, включающая в себя ориентацию пользователя, может получаться без установки аппаратных компонентов, таких как гироскоп или электронный компас, внутри электронного устройства, за счет чего могут уменьшаться вес и размеры электронного устройства, и может сокращаться стоимость изготовления.
[00120] Фиг. 2A является блок-схемой последовательности операций, показывающей способ для позиционирования и навигации согласно другому примерному варианту осуществления. Настоящий вариант осуществления иллюстрируется посредством применения способа для позиционирования и навигации к электронному устройству. Способ для позиционирования и навигации может включать в себя следующие этапы.
[00121] На этапе 201, получается начальная координата пользователя.
[00122] Электронное устройство получает начальную координату пользователя посредством таких способов позиционирования, как GPS, посредством базовой станции или Wi-Fi. Начальная координата пользователя представляет собой координату, соответствующую текущей географической позиции пользователя в абсолютной системе координат, при рассмотрении земли в качестве системы координат. Поскольку в вышеуказанных трех способах могут возникать различные степени ошибки, начальная координата пользователя, полученная посредством электронного устройства при таком условии, может рассматриваться в качестве относительно приближенной величины, т.е. начальная координата может не быть совершенно идентичной фактической координате географической позиции, в которой в данный момент фактически находится пользователь.
[00123] Например, может возникать ошибка приблизительно в 15 метров между начальной координатой, полученной посредством GPS-позиционирования, и текущей фактической координатой пользователя. Согласно другому примеру, может возникать ошибка в десятки или даже сотни метров между начальной координатой, полученной посредством позиционирования посредством базовой станции или Wi-Fi-позиционирования, и текущей фактической координатой пользователя.
[00124] Кроме того, вышеуказанная начальная координата пользователя, полученная посредством таких способов позиционирования, как GPS, посредством базовой станции или Wi-Fi, представляет собой двумерную координату, в которой не учитывается высота географической позиции, в которой фактически находится пользователь. В варианте осуществления, трехмерная начальная координата может получаться посредством вышеуказанных трех способов позиционирования или дополнительных комбинированных компонентов, таких как барометрический высотомер.
[00125] На этапе 202, получается предварительно установленное число изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате.
[00126] После получения начальной координаты пользователя электронное устройство получает предварительно установленное число изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате.
[00127] Этот этап может включать в себя следующие подэтапы.
[00128] Во-первых, получаются m возможных вариантов изображений в пределах предварительно установленного географического диапазона, соответствующего начальной координате.
[00129] Множество возможных вариантов изображений предварительно сохраняется в электронном устройстве или на сервере, соответствующем прикладной программе, предоставляющей способ для позиционирования и навигации, предусмотренный в настоящем варианте осуществления. Возможные варианты изображений обычно представляют собой изображения архитектурных достопримечательностей или пейзажей различных мест, таких как горы, башни, высокие здания, школы и магазины. Возможные варианты изображений могут собираться и получаться заранее техническими специалистами в различных местах либо могут получаться посредством сбора картинок, загруженных от различных пользователей.
[00130] Кроме того, отношение соответствия между различными возможными вариантами изображений и различными абсолютными координатами сохраняется в электронном устройстве или на сервере, соответствующем прикладной программе, предоставляющей способ для позиционирования и навигации, предусмотренный в настоящем варианте осуществления. Абсолютная координата представляет собой координату, соответствующую географической позиции, в которой фактически находится объект в возможном варианте изображения в абсолютной системе координат, при рассмотрении земли в качестве системы координат. Обычно, абсолютные координаты модифицируются и корректируются в течение длительного периода времени, так что можно считать, что абсолютная координата, соответствующая каждому возможному варианту изображения, является точной, т.е. абсолютная координата допускает точное отражение географической позиции, в которой фактически находится объект в возможном варианте изображения.
[00131] После получения начальной координаты пользователя электронное устройство определяет предварительно установленный географический диапазон согласно начальной координате. Например, круговая область, при рассмотрении начальной координаты в качестве центра и с радиусом в 500 метров, составляет предварительно установленный географический диапазон. Затем электронное устройство получает m возможных вариантов изображений, абсолютные координаты которых находятся в пределах предварительно установленного географического диапазона.
[00132] Во-вторых, изображения окружения в предварительно установленном числе n выбираются из m возможных вариантов изображений, где m≥n>0.
[00133] В первой возможной реализации, m возможных вариантов изображений упорядочиваются согласно предварительно установленному приоритету, с тем чтобы получать последовательность возможных вариантов изображений, и изображения окружения в предварительно установленном числе n выбираются из последовательности возможных вариантов изображений.
[00134] После получения m возможных вариантов изображений в пределах предварительно установленного географического диапазона, соответствующего начальной координате, электронное устройство может упорядочивать m возможных вариантов изображений согласно предварительно установленному приоритету, с тем чтобы получать последовательность возможных вариантов изображений. Например, электронное устройство упорядочивает возможные варианты изображений согласно расстоянию между абсолютными координатами, соответствующими различным возможным вариантам изображений, и начальной координатой, с тем чтобы получать последовательность возможных вариантов изображений. Последовательность возможных вариантов изображений спереди назад последовательно включает в себя m возможных вариантов изображений с расстояниями между абсолютными координатами и начальной координатой от близких до далеких.
[00135] Затем электронное устройство автоматически выбирает изображения окружения в предварительно установленном числе n из последовательности возможных вариантов изображений. Обычно, электронное устройство выбирает возможные варианты изображений в предварительно установленном числе n с более высоким приоритетом в качестве изображений окружения. Изображения окружения означают изображения окружения, окружающего географическую позицию, в которой в данный момент фактически находится пользователь. Предварительно установленное число n предварительно установлено исследователями и может быть предварительно установлено в качестве 1, 2 или 3 согласно различным алгоритмам, предоставленным ниже посредством настоящего варианта осуществления. Конечно, настоящий вариант осуществления не ограничивает другие возможные значения для предварительно установленного числа n.
[00136] Во второй возможной реализации, отображаются часть или все из m возможных вариантов изображений, принимается сигнал выбора, соответствующий возможным вариантам изображений, и определяются изображения окружения в предварительно установленном числе n согласно сигналу выбора.
[00137] После получения m возможных вариантов изображений электронное устройство также может отображать часть или все из m возможных вариантов изображений, т.е. возможные варианты изображений показываются пользователю; затем, пользователь выбирает возможные варианты изображений в предварительно установленном числе n из этих возможных вариантов изображений в качестве изображений окружения. При таком условии, согласно текущей и фактической окружающей обстановке, пользователь может выбирать изображения окружения, соответствующие объектам, которые могут быть ясно видны самим пользователем или имеют более близкое расстояние от самого пользователя, что позволяет в определенной степени повышать точность последующего позиционирования и позволяет улучшать взаимодействие и повышать заинтересованность.
[00138] На этапе 203, абсолютная координата, соответствующая каждому изображению окружения, получается из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами.
[00139] На вышеуказанном этапе 202 представлено то, что отношение соответствия между различными возможными вариантами изображений и различными абсолютными координатами сохраняется в электронном устройстве или на сервере, соответствующем прикладной программе, предоставляющей способ для позиционирования и навигации, предусмотренный в настоящем варианте осуществления. Абсолютная координата представляет собой координату, соответствующую географической позиции, в которой фактически находится объект в возможном варианте изображения в абсолютной системе координат, при рассмотрении земли в качестве системы координат. После получения изображений окружения в предварительно установленном числе электронное устройство получает абсолютную координату, соответствующую каждому изображению окружения, из вышеуказанного отношения соответствия.
[00140] На этапе 204, получается относительная позиция между объектом в изображении окружения и пользователем для каждого изображения окружения.
[00141] Электронное устройство получает относительную позицию между объектом в изображении окружения и пользователем для каждого изображения окружения. Относительная позиция может получаться посредством взаимодействия с пользователем. Этот этап может включать в себя следующие подэтапы.
[00142] Во-первых, отображаются изображение окружения и направляющая информация, причем направляющая информация выполнена с возможностью направлять пользователя таким образом, что он находится лицом к объекту в изображении окружения, и/или направлять пользователя таким образом, чтобы перемещать изображение окружения в соответствующем направлении согласно относительной позиции между объектом в изображении окружения и самим пользователем, и/или направлять пользователя таким образом, чтобы перемещать изображение окружения в соответствующую позицию согласно относительной позиции между объектом в изображении окружения и самим пользователем.
[00143] Во-вторых, принимается входной сигнал, инициированный пользователем согласно направляющей информации.
[00144] В-третьих, определяется относительная позиция между объектом в изображении окружения и пользователем согласно входному сигналу.
[00145] Со ссылкой на фиг. 2B, когда текущее число n=1, электронное устройство отображает изображение 21 окружения и направляющую информацию 22. Например, направляющая информация 22 "Вы можете видеть и повернуться лицом к объекту в изображении?". После наблюдения изображения 21 окружения и направляющей информации 22, пользователь поворачивается к объекту лицом в изображении 21 окружения согласно подсказке из направляющей информации 21 и нажимает кнопку 23 "Подтвердить". После приема сигнала подтверждения, что пользователь нажимает кнопку 23 "Подтвердить", электронное устройство получает относительную позицию между объектом в изображении окружения и пользователем, и относительная позиция представляет собой то, что объект в изображении окружения находится непосредственно перед пользователем.
[00146] Со ссылкой на фиг. 2C, когда текущее число n=1, электронное устройство по-прежнему отображает изображение 21 окружения и направляющую информацию 22. При таком условии, направляющая информация 22 может представлять собой "Перетащите изображение пальцем в соответствующем направлении согласно относительной позиции между объектом в изображении и Вами!". После наблюдения изображения 21 окружения и направляющей информации 22, пользователь сначала просматривает относительную позицию (например, непосредственно справа) между объектом в изображении 21 окружения и самим пользователем согласно подсказке из направляющей информации 22 и после этого перетаскивает изображение 21 окружения пальцем на экране электронного устройства на определенное расстояние в направлении непосредственно справа относительно изображения 21 окружения. После обнаружения сигнала проведения пальцем по экрану пользователя электронное устройство определяет относительную позицию между объектом в изображении окружения и пользователем согласно геометрическому месту точек проведения пальцем по экрану, и относительная позиция представляет собой то, что объект в изображении окружения находится непосредственно справа от пользователя.
[00147] Конечно, направление проведения пальцем по экрану может быть произвольным, и любое направление проведения пальцем по экрану уникально соответствует одной относительной позиции. Например, проведение пальцем по экрану вверх соответствует тому, что объект в изображении окружения находится непосредственно перед пользователем, проведение пальцем по экрану вправо соответствует тому, что объект в изображении окружения находится непосредственно справа от пользователя, проведение пальцем по экрану влево соответствует тому, что объект в изображении окружения находится непосредственно слева от пользователя, проведение пальцем по экрану вниз соответствует тому, что объект в изображении окружения находится непосредственно позади пользователя, проведение пальцем по экрану вверх вправо на 45° соответствует тому, что объект в изображении окружения находится спереди справа под углом 45° от пользователя, проведение пальцем по экрану вверх влево на 30° соответствует тому, что объект в изображении окружения находится спереди слева под углом в 30° от пользователя, и т.д.
[00148] Со ссылкой на фиг. 2D, когда предварительно установленное число n=2, электронное устройство по-прежнему отображает изображения 21 окружения и направляющую информацию 22. При таком условии, направляющая информация 22 может представлять собой "Обратитесь лицом к объекту в первом изображении и перетащите второе изображение пальцем в соответствующем направлении согласно относительной позиции между объектом во втором изображении и Вами!". После наблюдения двух изображений 21 окружения и направляющей информации 22, согласно подсказке из направляющей информации 22, пользователь сначала поворачивается к объекту лицом в первом изображении окружения 21, затем просматривает относительную позицию (например, непосредственно справа) между объектом во втором изображении окружения 21 и самим пользователем; и после этого перетаскивает второе изображение 21 окружения пальцем на экране электронного устройства на определенное расстояние в направлении непосредственно справа относительно второго изображения окружения 21. После обнаружения сигнала проведения пальцем по экрану пользователя электронное устройство получает относительные позиции между объектами в двух изображениях окружения и пользователем, соответственно, и относительная позиция представляет собой то, что объект в первом изображении окружения находится непосредственно перед пользователем, а объект во втором изображении окружения находится непосредственно справа от пользователя.
[00149] Конечно, в других возможных реализациях, когда предварительно установленное число n=2, направляющая информация 22 также может представлять собой "Перетащите изображения пальцем в соответствующих направлениях, соответственно, согласно относительным позициям между объектами в изображениях и Вами!". Таким образом, электронное устройство может определять относительные позиции между объектами в двух изображениях окружения и пользователем, соответственно, согласно двум геометрическим местам точек проведения пальцем по экрану.
[00150] Со ссылкой на фиг. 2E, когда предварительно установленное число n=3, электронное устройство по-прежнему отображает изображения 21 окружения и направляющую информацию 22. При таком условии, направляющая информация 22 может представлять собой "Поместите изображения в соответствующие позиции, соответственно, согласно относительным позициям между объектами в изображениях и Вами!". После наблюдения трех изображений 21 окружения и направляющей информации 22, согласно подсказке из направляющей информации 22, пользователь просматривает относительные позиции (включающие в себя непосредственно впереди, непосредственно слева и непосредственно справа) между объектами в трех изображениях 21 окружения и самим пользователем, соответственно; затем помещает три изображения 21 окружения в соответствующие поля, соответственно, и после этого нажимает кнопку 23 "Подтвердить". После приема сигнала подтверждения, что пользователь нажимает кнопку 23 "Подтвердить", электронное устройство получает относительные позиции между объектами в изображениях окружения и пользователем, соответственно, и относительные позиции включают в себя такую взаимосвязь, что объект в первом изображении окружения находится непосредственно перед пользователем, объект во втором изображении окружения находится непосредственно справа от пользователя, а объект в третьем изображении окружения находится непосредственно слева от пользователя.
[00151] Конечно, фиг. 2E иллюстрирует только относительно простую реализацию. В других возможных реализациях, не обязательно задаются ограничения тремя относительными позициями непосредственно впереди, непосредственно слева и непосредственно справа. К реализации на фиг. 2C по-прежнему можно обращаться, и относительные позиции между объектами в изображениях окружения и пользователем могут получаться согласно геометрическому месту точек проведения пальцем по экрану под любым угловым градусом, что не представлено конкретно в данном документе.
[00152] На этапе 205, определяется информация текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты.
[00153] После получения относительной позиции между объектом в каждом изображении окружения и пользователем и абсолютной координатой объекта в каждом изображении окружения, электронное устройство вычисляет информацию текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты. Информация географической позиции включает в себя фактическую координату и ориентацию пользователя.
[00154] В дальнейшем в этом документе, для различных реализаций, показанных посредством фиг. 2B-2E, соответственно, представлены и подробно описаны вычисления информации географической позиции.
[00155] В первой возможной реализации, иллюстрация приводится с предварительно установленным числом n=1.
[00156] Со ссылкой на фиг. 2B и фиг. 2F или фиг. 2C и фиг. 2G, когда число изображений окружения равно 1, текущая ориентация пользователя определяется на основе относительной позиции, абсолютной координаты и начальной координаты, и начальная координата определяется в качестве фактической координаты пользователя.
[00157] Во-первых, начальная координата определяется в качестве фактической координаты пользователя.
[00158] В случае если число изображений окружения равно 1, начальная координата непосредственно использована в качестве фактической координаты. Хотя начальная координата может быть не очень точной, она может отражать, в пределах допустимого диапазона ошибок, географическую позицию, в которой в данный момент фактически находится пользователь. Самое главное, может упрощаться алгоритм, и может повышаться эффективность для позиционирования и навигации.
[00159] Во-вторых, текущая ориентация пользователя определяется на основе относительной позиции, абсолютной координаты и начальной координаты.
[00160] Вышеуказанный второй подэтап дополнительно может включать в себя следующие два подэтапа:
[00161] 1. Получается опорное направление от координатной точки A начальной координаты к координатной точке B абсолютной координаты.
[00162] Со ссылкой на фиг. 2F или фиг. 2G, предполагается, что в абсолютной системе координат (т.е. в двумерной прямоугольной системе координат на чертеже, в которой в вертикальном направлении, при условии направления вверх в качестве севера, а направления вниз в качестве юга, в горизонтальном направлении, при условии направления влево в качестве запада и направления вправо в качестве востока), координатная точка начальной координаты составляет A(x1, y1), а координатная точка B абсолютной координаты составляет B (x2, y2), получается опорное направление от координатной точки A(x1, y1) начальной координаты к координатной точке B (x2, y2) абсолютной координаты (показано посредством пунктирной стрелки на чертеже).
[00163] 2. Ориентация определяется на основе опорного направления и относительной позиции.
[00164] Со ссылкой на фиг. 2B и фиг. 2F, когда относительная позиция между объектом в изображении окружения и пользователем представляет собой то, что объект находится непосредственно перед пользователем, опорное направление от координатной точки A(x1, y1) к координатной точке B (x2, y2) представляет собой ориентацию пользователя (показана посредством сплошной стрелки на фиг. 2F). Затем угол δ между этой ориентацией и направлением прямо на восток в абсолютной системе координат может быть дополнительно вычислен, т.е. δ=arctan|(y2-y1)/(x2-x1)|.
[00165] Со ссылкой на фиг. 2C и фиг. 2G, когда относительная позиция между объектом в изображении окружения и пользователем представляет собой то, что объект в изображении окружения находится непосредственно справа от пользователя, ориентация пользователя представляет собой направление, полученное посредством отклонения опорного направления от координатной точки A(x1, y1) к координатной точке B (x2, y2) на 90° против часовой стрелки (показано посредством сплошной стрелки на фиг. 2G). Затем угол δ между этой ориентацией и направлением прямо на восток в абсолютной системе координат может быть дополнительно вычислен, т.е. δ=arctan|(x2-x1)/(y2-y1)|.
[00166] Кроме того, когда относительная позиция представляет собой то, что объект в изображении окружения находится непосредственно слева от пользователя, ориентация пользователя представляет собой направление, полученное посредством отклонения опорного направления от координатной точки A к координатной точке B на 90° по часовой стрелке (не показано); либо когда относительная позиция представляет собой то, что объект в изображении окружения находится спереди слева под углом в 30° от пользователя, ориентация пользователя представляет собой направление, полученное посредством отклонения опорного направления от координатной точки A к координатной точке B на 30° по часовой стрелке. По этой аналогии, электронное устройство может определять ориентацию пользователя на основе опорного направления и относительной позиции.
[00167] Следует отметить, что вышеописанные варианты осуществления иллюстрируются посредством угла ϒ между ориентацией пользователя и направлением прямо на восток в абсолютной системе координат; в фактических вариантах применения, после получения ориентации пользователя, может вычисляться угол между этой ориентацией и любым направлением (включающим в себя направление прямо на восток, направление прямо на север, направление прямо на запад и т.д.) в абсолютной системе координат.
[00168] Во второй возможной реализации, иллюстрация приводится с предварительно установленным числом n=2.
[00169] Когда число изображений окружения равно 2, текущая ориентация и фактическая координата пользователя определяются на основе относительной позиции, абсолютной координаты и начальной координаты.
[00170] Во-первых, со ссылкой на левые части по фиг. 2D и фиг. 2H, когда предварительно установленное число n=2, получается прямая линия AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате; фактическая координата определяется на основе второй координатной точки B2 в абсолютной координате, прямой линии AB1 и двух из относительных позиций; и ориентация определяется на основе фактической координаты и, по меньшей мере, одной из относительных позиций.
[00171] 1. Получается прямая линия AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате.
[00172] В случае если число изображений окружения равно 2, во-первых, одна координатная точка B1(x2, y2) выбирается из двух координатных точек абсолютной координаты, и затем прямая линия AB1 получается посредством связывания координатной точки A(x1, y1) начальной координаты и координатной точки B1(x2, y2).
[00173] Что касается левой части по фиг. 2H, в настоящем варианте осуществления предполагается, что относительная позиция между объектом, соответствующим первой координатной точке B1(x2, y2), выбранной в абсолютной координате, и пользователем представляет собой то, что объект находится непосредственно перед пользователем. Прямая линия AB1 (показана посредством пунктирной линии) получается посредством связывания координатной точки A(x1, y1) начальной координаты и первой координатной точки B1(x2, y2) в абсолютной координате.
[00174] 2. Фактическая координата определяется на основе второй координатной точки B2 в абсолютной координате, прямой линии AB1 и двух из относительных позиций.
[00175] Со ссылкой на фиг. 2D, поскольку относительная позиция между объектом, соответствующим первой координатной точке B1(x2, y2) в абсолютной координате, и пользователем представляет собой то, что объект находится непосредственно перед пользователем, и относительная позиция между объектом, соответствующим второй координатной точке B2(x3, y3) в абсолютной координате, и пользователем представляет собой то, что объект находится непосредственно слева от пользователя, ∠B1S÷B2, который составляется посредством взятия координатной точки S(x0, y0) фактической координаты пользователя в качестве вершины и взятия прямой линии SB1 и прямой линии SB2 в качестве двух сторон угла, должен составлять 90°; в силу чего посредством проведения вертикальной линии B2S прямой линии AB1, которая проходит через координатную точку B2, координата (x0, y0) основания S перпендикуляра представляет собой фактическую координату.
[00176] Кроме того, при условии, что относительная позиция между объектом, соответствующим первой координатной точке B1(x2, y2) в абсолютной координате, и пользователем представляет собой то, что объект находится спереди слева под углом в 30° от пользователя, и относительная позиция между объектом, соответствующим второй координатной точке B2(x3, y3) в абсолютной координате, и пользователем представляет собой то, что объект находится спереди справа под углом 45° от пользователя, ∠B1S÷B2, который составляется посредством взятия координатной точки S(x0, y0) фактической координаты пользователя в качестве вершины и взятия прямой линии SB1 и прямой линии SB2 в качестве двух сторон угла, должен составлять 75°; в силу чего точка S может быть найдена на прямой линии AB1 таким образом, что ∠B1S÷B2=75°, так что координата (x0, y0) точки S представляет собой фактическую координату.
[00177] 3. Ориентация определяется на основе фактической координаты и, по меньшей мере, одной из относительных позиций.
[00178] После получения фактической координаты S(x0, y0) ориентация пользователя определяется на основе одной или двух из относительных позиций. Поскольку относительная позиция между объектом, соответствующим первой координатной точке B1(x2, y2) в абсолютной координате, и пользователем представляет собой то, что объект находится непосредственно перед пользователем, ориентация пользователя представляет собой направление радиальной линии SB1 (показано посредством сплошной стрелки на чертеже). Затем угол δ между этой ориентацией и направлением прямо на восток в абсолютной системе координат может быть дополнительно вычислен. В варианте осуществления, показанном посредством левой части по фиг. 2H, δ=arctan|(y0-y1)/(x0-x1)|.
[00179] Следует отметить, что в силу способа вычисления, предоставленного посредством левой части по фиг. 2H, предусмотрено более строгое требование для выбора первой координатной точки B1в двух абсолютных координатах. Точность относительной позиции между объектом, соответствующим первой координатной точке B1, и пользователем непосредственно связана с точностью конечной вычисленной фактической координаты и ориентации. Таким образом, координатная точка, соответствующая объекту, относительная позиция которого находится непосредственно перед пользователем, обычно выбирается в качестве первой координатной точки B1.
[00180] Также следует отметить, что поскольку отличаются начальные координаты пользователя, полученные посредством различных таких способов позиционирования, как GPS, посредством базовой станции или Wi-Fi, и GPS-позиционирование имеет большую точность, чем позиционирование посредством базовой станции или Wi-Fi-позиционирование, в силу этого, когда включается функция GPS-позиционирования электронного устройства, средняя точка сегмента AS в левой части по фиг. 2H может выбираться в качестве координатной точки фактической координаты пользователя; а когда выключается функция GPS-позиционирования электронного устройства, точка S в левой части по фиг. 2H может быть непосредственно выбрана в качестве координатной точки фактической координаты пользователя. В фактических вариантах применения, различные алгоритмы могут выбираться согласно фактическим требованиям, чтобы получать фактическую координату пользователя. Настоящий вариант осуществления не налагает конкретные ограничения на это.
[00181] Левая часть по фиг. 2H показывает возможный способ вычисления, когда число изображений окружения равно 2. В дальнейшем в этом документе, другой возможный способ вычисления, когда число изображений окружения равно 2, представлен в сочетании с правой частью по фиг. 2H.
[00182] Во-вторых, со ссылкой на правые части по фиг. 2D и фиг. 2H, когда предварительно установленное число n=2, получаются, соответственно, прямая линия AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате и прямая линия AB2, которая проходит через координатную точку A начальной координаты и вторую координатную точку B2 в абсолютной координате; ориентация определяется на основе прямой линии AB1, прямой линии AB2 и двух из относительных позиций; и фактическая координата определяется на основе ориентации и, по меньшей мере, одной из относительных позиций.
[00183] 1. Получаются, соответственно, прямая линия AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате, и прямая линия AB2, которая проходит через координатную точку A начальной координаты и вторую координатную точку B2 в абсолютной координате.
[00184] В настоящем варианте осуществления предполагается, что относительная позиция между объектом в первом изображении окружения (которое получается посредством электронного устройства на вышеуказанном этапе 203) и пользователем представляет собой то, что объект находится спереди слева под углом в 30° от пользователя, и относительная позиция между объектом во втором изображении окружения и пользователем представляет собой то, что объект находится спереди справа под углом 45° от пользователя. Что касается правой части по фиг. 2H, прямая линия AB1 получается посредством связывания первой координатной точки B1(x2, y2) в абсолютной координате и координатной точки A(x1, y1) начальной координаты; и прямая линия AB2 (показана посредством пунктирных линий) получается посредством связывания второй координатной точки B2(x3, y3) в абсолютной координате и координатной точки A(x1, y1) начальной координаты.
[00185] 2. Ориентация определяется на основе прямой линии AB1, прямой линии AB2 и двух из относительных позиций.
[00186] Во-первых, первый возможный вариант ориентации определяется на основе прямой линии AB1 и относительной позиции между объектом в первом изображении окружения и пользователем. Например, поскольку относительная позиция между объектом в первом изображении окружения и пользователем представляет собой то, что объект находится спереди слева под углом в 30° от пользователя, ∠B1A÷C1 формируется посредством взятия A(x1, y1) в качестве вершины угла, взятия прямой линии AB1 в качестве одной стороны угла и после этого поворота прямой линии AB1 на 30° против часовой стрелки. Направление радиальной линии AC1 представляет собой первый возможный вариант направления.
[00187] Затем второй возможный вариант ориентации определяется на основе прямой линии AB2 и относительной позиции между объектом во втором изображении окружения и пользователем. Например, поскольку относительная позиция между объектом во втором изображении окружения и пользователем представляет собой то, что объект находится спереди справа под углом 45° от пользователя, ∠B2A÷C2 формируется посредством взятия A(x1, y1) в качестве вершины угла, взятия прямой линии AB2 в качестве одной стороны угла и поворота прямой линии AB2 на 45° по часовой стрелке. Направление радиальной линии AC2 представляет собой второй возможный вариант направления.
[00188] Затем угловая биссектриса AC3 ∠C1A÷C2 предоставляется. Направление радиальной линии AC3 представляет собой ориентацию пользователя.
[00189] 3. Фактическая координата определяется на основе ориентации и, по меньшей мере, одной из относительных позиций.
[00190] После определения ориентации пользователя точка S1 и точка S2 выбираются на прямой линии AC3 таким образом, что ∠B1S1÷C3=30°, и ∠B2S2÷C3=45°; когда точка S1 и точка S2совпадают друг с другом, точка S1 или точка S2 выбираются в качестве координатной точки S(x0, y0) фактической координаты пользователя; а когда точка S1 и точка S2не совпадают друг с другом, средняя точка сегмента S1S2 выбирается в качестве координатной точки S(x0, y0) фактической координаты пользователя.
[00191] Затем может дополнительно вычисляться угол ϒ между ориентацией пользователя и направлением прямо на восток в абсолютной системе координат. В варианте осуществления, показанном посредством правой части по фиг. 2H, δ=arctan|(y0-y1)/(x0-x1)|.
[00192] Следует отметить, что в способе вычисления, предоставленном посредством правой части по фиг. 2H, взаимосвязи позиций между объектами в двух изображениях окружения и пользователе одновременно рассматриваются при вычислении ориентации и фактической координаты пользователя, и ориентация и фактическая координата пользователя определяются посредством усреднения алгоритма на основе двух возможных вариантов ориентаций, так что повышается стабильность результата вычисления.
[00193] В третьей возможной реализации, иллюстрация приводится с предварительно установленным числом n=3.
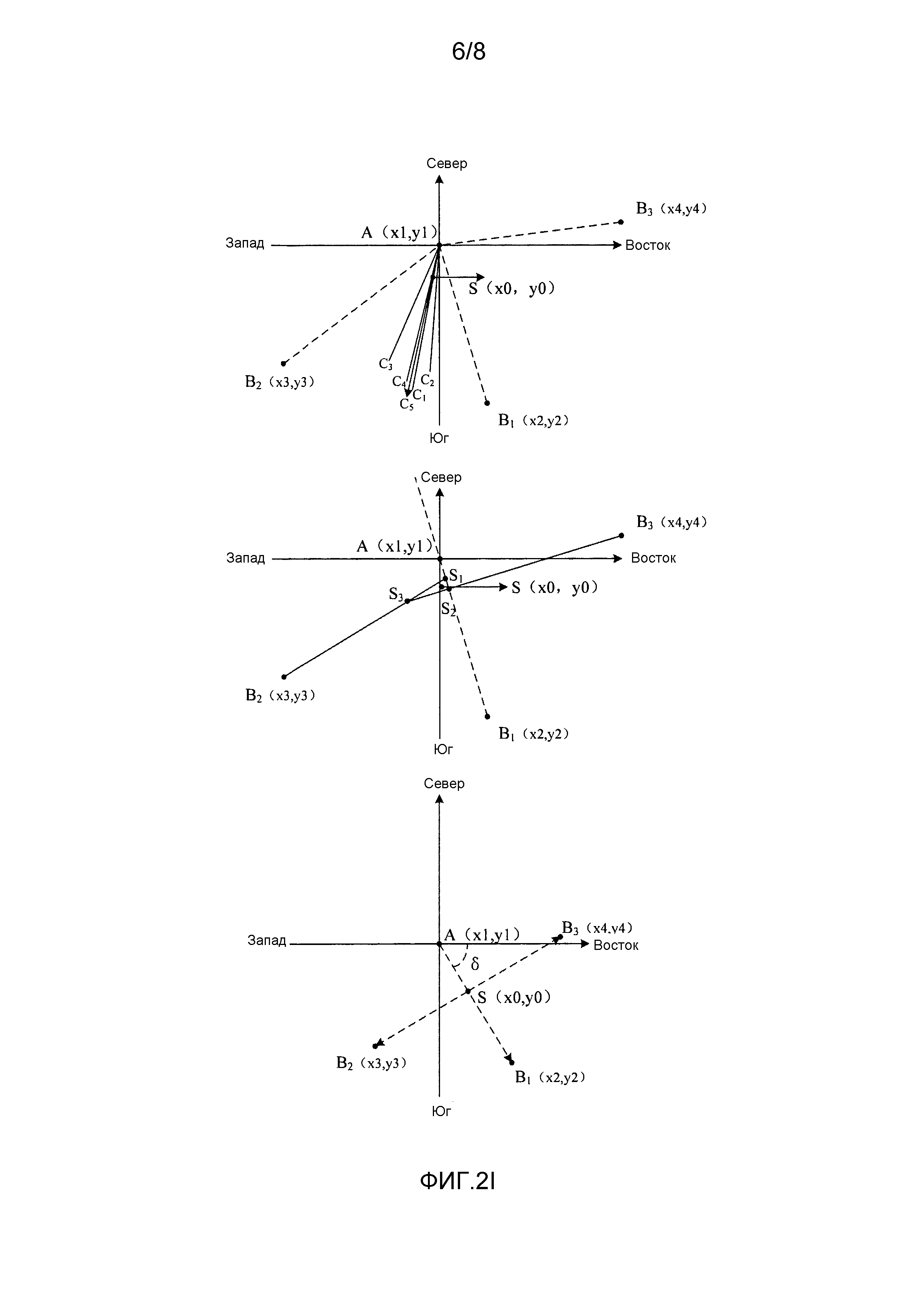
[00194] Во-первых, со ссылкой на фиг. 2E и верхнюю часть по фиг. 2I, когда предварительно установленное число n=3, соответственно, получаются прямая линия AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате, прямая линия AB2, которая проходит через координатную точку A начальной координаты и вторую координатную точку B2 в абсолютной координате, и прямая линия AB3, которая проходит через координатную точку A начальной координаты и третью координатную точку B3 в абсолютной координате; ориентация определяется на основе прямой линии AB1, прямой линии AB2, прямой линии AB3 и трех из относительных позиций; и фактическая координата определяется на основе ориентации и, по меньшей мере, одной из относительных позиций.
[00195] 1. Получаются, соответственно, прямая линия AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате, прямая линия AB2, которая проходит через координатную точку A начальной координаты и вторую координатную точку B2 в абсолютной координате, и прямая линия AB3, которая проходит через координатную точку A начальной координаты и третью координатную точку B3 в абсолютной координате.
[00196] В настоящем варианте осуществления предполагается, что относительная позиция между объектом в первом изображении окружения (которое получается посредством электронного устройства на вышеуказанном этапе 203) и пользователем представляет собой то, что объект находится спереди слева под углом в 30° от пользователя, относительная позиция между объектом во втором изображении окружения и пользователем представляет собой то, что объект находится спереди справа под углом 45° от пользователя, и относительная позиция между объектом в третьем изображении окружения и пользователя представляет собой то, что объект находится спереди слева под углом 120° от пользователя. Что касается верхней части по фиг. 2I, прямая линия AB1 получается посредством связывания первой координатной точки B1(x2, y2) в абсолютной координате и координатной точки A(x1, y1) начальной координаты; прямая линия AB2 получается посредством связывания второй координатной точки B2(x3, y3) в абсолютной координате и координатной точки A(x1, y1) начальной координаты; и прямая линия AB3 (показана посредством пунктирных линий) получается посредством связывания третьей координатной точки B3(x4, y4) в абсолютной координате и координатной точки A(x1, y1) начальной координаты.
[00197] 2. Ориентация определяется на основе прямой линии AB1, прямой линии AB2, прямой линии AB3 и трех из относительных позиций.
[00198] (1) Первый возможный вариант ориентации определяется на основе прямой линии AB1 и относительной позиции между объектом в первом изображении окружения и пользователем. Например, поскольку относительная позиция между объектом в первом изображении окружения и пользователем представляет собой то, что объект находится спереди слева под углом в 30° от пользователя, ∠B1A÷C1 предоставляется посредством взятия A(x1, y1) в качестве вершины угла, взятия прямой линии AB1 в качестве одной стороны угла и поворота прямой линии AB1 на 30° против часовой стрелки. Направление радиальной линии AC1 представляет собой первый возможный вариант направления.
[00199] (2) Второй возможный вариант ориентации определяется на основе прямой линии AB2 и относительной позиции между объектом во втором изображении окружения и пользователем. Например, поскольку относительная позиция между объектом во втором изображении окружения и пользователем представляет собой то, что объект находится спереди справа под углом 45° от пользователя, ∠B2A÷C2 предоставляется посредством взятия A(x1, y1) в качестве вершины угла, взятия прямой линии AB2 в качестве одной стороны угла и поворота прямой линии AB2 на 45° по часовой стрелке. Направление радиальной линии AC2 представляет собой второй возможный вариант направления.
[00200] (3) Третий возможный вариант ориентации определяется на основе прямой линии AB3 и относительной позиции между объектом в третьем изображении окружения и пользователем. Например, поскольку относительная позиция между объектом в третьем изображении окружения и пользователем представляет собой то, что объект находится спереди слева под углом 120° от пользователя, ∠B3A÷C3 предоставляется посредством взятия A(x1, y1) в качестве вершины угла, взятия прямой линии AB3 в качестве одной стороны угла и поворота прямой линии AB3 на 120° по часовой стрелке. Направление радиальной линии AC3 представляет собой третий возможный вариант направления.
[00201] (4) Угловая биссектриса AC4∠C2A÷C3 предоставляется, и угловая биссектриса AC5∠C1A÷C4предоставляется. Направление радиальной линии AC5 представляет собой ориентацию пользователя.
[00202] 3. Фактическая координата определяется на основе ориентации и, по меньшей мере, одной из относительных позиций.
[00203] После определения ориентации пользователя точка S1, точка S2 и точка S3(не показана) выбираются на прямой линии AC5 таким образом, что ∠B1S1÷C5=30°, ∠B2S2÷C5=45°, и ∠B3S3÷C5=120°; когда точка S1, точка S2 и точка S3совпадают друг с другом, точка S1 или точка S2, или точка S3выбирается в качестве координатной точки S(x0, y0) фактической координаты пользователя; а когда точка S1, точка S2 и точка S3не совпадают друг с другом, средняя точка сегмента, состоящего из точки S1, точки S2 и точки S3, выбирается в качестве координатной точки S(x0, y0) фактической координаты пользователя. Затем может дополнительно вычисляться угол δ между ориентацией пользователя и направлением прямо на восток в абсолютной системе координат, т.е. δ=arctan|(y0-y1)/(x0-x1)|.
[00204] Вышеприведенный первый способ вычисления, когда число изображений окружения равно 3, является идентичным или аналогичным второму способу вычисления, когда число изображений окружения равно 2, так что можно обратиться ко второму способу вычисления, когда число изображений окружения равно 2.
[00205] Во-вторых, со ссылкой на фиг. 2E и среднюю часть по фиг. 2I, когда предварительно установленное число n=3:
[00206] 1. Получается прямая линия AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате.
[00207] Что касается средней части по фиг. 2I, в настоящем варианте осуществления предполагается, что относительная позиция между объектом, соответствующим выбранной первой координатной точке B1(x2, y2) в абсолютной координате, и пользователем представляет собой то, что объект находится спереди слева под углом в 30° от пользователя. Прямая линия AB1 (показана посредством пунктирной линии) получается посредством связывания координатной точки A(x1, y1) начальной координаты и первой координатной точки B1(x2, y2) в абсолютной координате.
[00208] 2. Фактическая координата определяется на основе второй координатной точки B2 и третьей координатной точки B3 в абсолютной координате, прямой линии AB1 и трех из относительных позиций.
[00209] Поскольку относительная позиция между объектом в первом изображении окружения и пользователем представляет собой то, что объект находится спереди слева под углом в 30° от пользователя, относительная позиция между объектом во втором изображении окружения и пользователем представляет собой то, что объект находится спереди справа под углом 45° от пользователя, и относительная позиция между объектом в третьем изображении окружения и пользователя представляет собой то, что объект находится спереди слева под углом 120° от пользователя, точки S1 и точки S2 выбираются на прямой линии AB1 таким образом, что ∠B2S1B1=30°+45°=75°, и ∠B3S2B1=120°-30°=90°.
[00210] Что касается средней части по фиг. 2I, после получения точки S1 и точки S2, координата средней точки сегмента S1S2 может выбираться в качестве фактической координаты пользователя (не показана); либо инвертированная удлиняющая линия может предоставляться вдоль B3S2 таким образом, что она пересекается с B2S1 в точке S3, и координата (x0, y0) средней точки S ΔS1S2S3 может выбираться в качестве фактической координаты пользователя.
[00211] 3. Ориентация определяется на основе фактической координаты и, по меньшей мере, одной из относительных позиций.
[00212] После получения фактической координаты S(x0, y0) ориентация пользователя определяется на основе, по меньшей мере, одной из относительных позиций.
[00213] Вышеуказанный второй способ вычисления, когда число изображений окружения равно 3, является идентичным или аналогичным первому способу вычисления, когда число изображений окружения равно 2, так что можно обратиться к первому способу вычисления, когда число изображений окружения равно 2.
[00214] В дальнейшем в этом документе, со ссылкой на фиг. 2E и нижнюю часть по фиг. 2I, ниже приводится алгоритм, используемый, когда относительные позиции между объектами в трех изображениях окружения и пользователем находятся непосредственно впереди, непосредственно слева и непосредственно справа:
[00215] 1. Обнаруживается то, удовлетворяют или нет три относительных позиции предварительно установленному условию, и предварительно установленное условие представляет собой следующее: одна из относительных позиций представляет собой то, что объект находится непосредственно перед пользователем, другая из относительных позиций представляет собой то, что объект находится непосредственно слева от пользователя, и еще одна другая из относительных позиций представляет собой то, что объект находится непосредственно справа от пользователя.
[00216] 2. Если обнаруживается то, что предварительно установленное условие удовлетворяется, получается прямая линия B2B3, которая проходит через координатную точку B2, соответствующую абсолютной координате объекта с относительной позицией непосредственно слева от пользователя, и координатную точку B3, соответствующую абсолютной координате объекта с относительной позицией непосредственно справа от пользователя.
[00217] 3. Получается вертикальная линия B1S между координатной точкой B1, соответствующей абсолютной координате объекта с относительной позицией непосредственно перед пользователем, и прямой линией B2B3.
[00218] 4. Координата основания S перпендикуляра определяется в качестве фактической координаты, и направление от основания S перпендикуляра к координатной точке B1 определяется в качестве ориентации.
[00219] Затем может дополнительно вычисляться угол δ между ориентацией пользователя и направлением прямо на восток в абсолютной системе координат, т.е. δ=arctan|(y0-y1)/(x0-x1)|.
[00220] В способе вычисления, предоставленном посредством нижней части по фиг. 2I, начальная координата не требуется во время вычисления фактической координаты и ориентации пользователя, в силу чего этот способ вычисления специально адаптирован с возможностью находить географическую позицию, в которой фактически находится пользователь, когда полученная начальная координата не является точной. Дополнительно, на основе способа для позиционирования и навигации, предоставленного посредством вышеописанного варианта осуществления, в комбинации с трехмерной начальной координатой, могут получаться изображения окружения с различными высотными отметками, с тем чтобы реализовывать позиционирование и навигацию на различных этажах в помещении. Существенно улучшаются объем адаптации и удобство и простота использования способа для позиционирования и навигации, предоставленного посредством настоящего варианта осуществления.
[00221] Кроме того, после получения информации текущей географической позиции пользователя, электронное устройство дополнительно может выполнять следующие этапы.
[00222] На этапе 206, получается координата назначения для пункта назначения, который должен быть достигнут пользователем.
[00223] Электронное устройство получает координату назначения для пункта назначения, который должен быть достигнут пользователем. Название пункта назначения обычно вводится пользователем, далее электронное устройство получает координату назначения для пункта назначения в абсолютной системе координат согласно названию пункта назначения, введенному пользователем.
[00224] На этапе 207, по меньшей мере, один маршрут определяется на основе координаты назначения и информации географической позиции.
[00225] Электронное устройство определяет, по меньшей мере, один маршрут на основе координаты назначения и информации географической позиции. Поскольку информация географической позиции содержит текущую фактическую координату пользователя, после получения координаты назначения и фактической координаты, электронное устройство может определять для пользователя, по меньшей мере, один маршрут от фактической координаты до координаты назначения, т.е. маршрут от географической позиции, в которой в данный момент находится пользователь, до пункта назначения, который должен быть достигнут пользователем.
[00226] На этапе 208, отображаются информация географической позиции, координата назначения и маршрут.
[00227] Затем электронное устройство отображает ориентацию пользователя, фактическую координату пользователя, координату назначения и маршрут, с тем чтобы направлять пользователя таким образом, чтобы достигать пункта назначения согласно отображаемой информации.
[00228] Если обобщать, в способе для позиционирования и навигации, предоставленном посредством настоящего варианта осуществления, посредством получения начальной координаты пользователя, получения предварительно установленного числа изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, и получения абсолютной координаты, соответствующей каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами, получения относительной позиции между объектом в изображении окружения и пользователем для каждого изображения окружения и определения информации текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты, разрешается такая проблема в предшествующем уровне техники, что вес, размеры и стоимость изготовления электронного устройства увеличиваются вследствие использования аппаратных компонентов, таких как гироскоп или электронный компас, для того чтобы получать ориентацию пользователя. В способе для позиционирования и навигации, предоставленном посредством настоящего варианта осуществления, информация географической позиции, включающая в себя ориентацию пользователя, может получаться без установки аппаратных компонентов, таких как гироскоп или электронный компас, внутри электронного устройства, за счет чего могут уменьшаться вес и размеры электронного устройства, и может сокращаться стоимость изготовления.
[00229] Дополнительно, что касается различных чисел изображений окружения, настоящий вариант осуществления предоставляет множество способов для вычисления ориентации и фактической координаты пользователя, некоторые алгоритмы являются простыми и имеют высокую эффективность для позиционирования и навигации; некоторые алгоритмы определяют ориентацию и фактическую координату пользователя посредством усреднения двух или трех возможных вариантов ориентаций, с тем чтобы повышать стабильность результата вычисления; и некоторые алгоритмы обеспечивают тесное взаимодействие с пользователем. В фактических вариантах применения, различные способы вычисления могут приспосабливаться согласно различным требованиям.
[00230] Ниже изложены варианты осуществления устройства настоящего изобретения, которое может быть выполнено с возможностью выполнять варианты осуществления способа настоящего изобретения. Что касается нераскрытых подробностей вариантов осуществления устройства настоящего изобретения, см. варианты осуществления способа настоящего изобретения.
[00231] Фиг. 3 является блок-схемой, показывающей устройство для позиционирования и навигации согласно примерному варианту осуществления. Устройство для позиционирования и навигации может быть реализовано как часть или все электронное устройство посредством программного обеспечения, аппаратных средств или комбинации вышеозначенного. Устройство для позиционирования и навигации может включать в себя модуль 310 получения начальных координат, модуль 320 получения изображений, модуль 330 получения позиции и модуль 340 картографического позиционирования.
[00232] Модуль 310 получения начальных координат выполнен с возможностью получать начальную координату пользователя.
[00233] Модуль 320 получения изображений выполнен с возможностью получать предварительно установленное число изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, и получать абсолютную координату, соответствующую каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами.
[00234] Модуль 330 получения позиции выполнен с возможностью получать относительную позицию между объектом в изображении окружения и пользователем для каждого изображения окружения.
[00235] Модуль 340 картографического позиционирования выполнен с возможностью определять информацию текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты.
[00236] Если обобщать, в устройстве для позиционирования и навигации, предоставленном посредством настоящего варианта осуществления, посредством получения начальной координаты пользователя, получения предварительно установленного числа изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, и получения абсолютной координаты, соответствующей каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами, получения относительной позиции между объектом в изображении окружения и пользователем для каждого изображения окружения и определения информации текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты, разрешается такая проблема в предшествующем уровне техники, что вес, размеры и стоимость изготовления электронного устройства увеличиваются вследствие использования аппаратных компонентов, таких как гироскоп или электронный компас, для того чтобы получать ориентацию пользователя. В устройстве для позиционирования и навигации, предоставленном посредством настоящего варианта осуществления, информация географической позиции, включающая в себя ориентацию пользователя, может получаться без установки аппаратных компонентов, таких как гироскоп или электронный компас, внутри электронного устройства, за счет чего могут уменьшаться вес и размеры электронного устройства, и может сокращаться стоимость изготовления.
[00237] Фиг. 4 является блок-схемой, показывающей устройство для позиционирования и навигации согласно другому примерному варианту осуществления. Устройство для позиционирования и навигации может быть реализовано как часть или все электронное устройство посредством программного обеспечения, аппаратных средств или комбинации вышеозначенного. Устройство для позиционирования и навигации может включать в себя модуль 310 получения начальных координат, модуль 320 получения изображений, модуль 330 получения позиции, модуль 340 картографического позиционирования, модуль 350 получения данных пункта назначения, модуль 360 определения маршрутов и модуль 370 отображения навигационной информации.
[00238] Модуль 310 получения начальных координат выполнен с возможностью получать начальную координату пользователя.
[00239] Модуль 320 получения изображений выполнен с возможностью получать предварительно установленное число изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, и получать абсолютную координату, соответствующую каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами.
[00240] Необязательно, модуль 320 получения изображений включает в себя блок 320a получения возможных вариантов и блок 320b получения изображений окружения.
[00241] Блок 320a получения возможных вариантов выполнен с возможностью получать m возможных вариантов изображений в пределах предварительно установленного географического диапазона, соответствующего начальной координате.
[00242] Блок 320b получения изображений окружения выполнен с возможностью выбирать изображения окружения в предварительно установленном числе n из m возможных вариантов изображений.
[00243] - где m≥n>0.
[00244] Необязательно, блок 320b получения изображений окружения включает в себя подблок 320b1 автоматического получения; или подблок 320b2 выбора пользователя.
[00245] Подблок 320b1 автоматического получения выполнен с возможностью упорядочивать m возможных вариантов изображений согласно предварительно установленному приоритету, с тем чтобы получать последовательность возможных вариантов изображений, и выбирать изображения окружения в предварительно установленном числе n из последовательности возможных вариантов изображений.
[00246] Подблок 320b2 выбора пользователя выполнен с возможностью отображать часть или все из m возможных вариантов изображений, принимать сигнал выбора, соответствующий возможным вариантам изображений, и определять изображения окружения в предварительно установленном числе n согласно сигналу выбора.
[00247] Модуль 330 получения позиции выполнен с возможностью получать относительную позицию между объектом в изображении окружения и пользователем для каждого изображения окружения.
[00248] Необязательно, модуль 330 получения позиции включает в себя блок 330a отображения информации, блок 330b приема сигналов и блок 330c определения позиции.
[00249] Блок 330a отображения информации выполнен с возможностью отображать изображение окружения и направляющую информацию, причем направляющая информация выполнена с возможностью направлять пользователя таким образом, что он находится лицом к объекту в изображении окружения, и/или направлять пользователя таким образом, чтобы перемещать изображение окружения в соответствующем направлении согласно относительной позиции между объектом в изображении окружения и самим пользователем, и/или направлять пользователя таким образом, чтобы перемещать изображение окружения в соответствующую позицию согласно относительной позиции между объектом в изображении окружения и самим пользователем.
[00250] Блок 330b приема сигналов выполнен с возможностью принимать входной сигнал, инициированный пользователем согласно направляющей информации.
[00251] Блок 330c определения позиции выполнен с возможностью определять относительную позицию между объектом в изображении окружения и пользователем согласно входному сигналу.
[00252] Модуль 340 картографического позиционирования выполнен с возможностью определять информацию текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты.
[00253] Необязательно, модуль 340 картографического позиционирования включает в себя первый блок 340a позиционирования и/или второй блок 340b позиционирования, и/или третий блок 340c позиционирования.
[00254] Первый блок 340a позиционирования выполнен с возможностью, когда число изображений окружения равно 1, определять текущую ориентацию пользователя на основе относительной позиции, абсолютной координаты и начальной координаты и определять начальную координату в качестве фактической координаты пользователя.
[00255] Необязательно, первый блок 340a позиционирования включает в себя подблок 340a1 получения направления и подблок 340a2 определения ориентации.
[00256] Подблок 340a1 получения направления выполнен с возможностью получать опорное направление от координатной точки A начальной координаты к координатной точке B абсолютной координаты.
[00257] Подблок 340a2 определения ориентации выполнен с возможностью определять ориентацию на основе опорного направления и относительной позиции.
[00258] Второй блок 340b позиционирования выполнен с возможностью, когда число изображений окружения равно 2, определять текущую ориентацию и фактическую координату пользователя на основе относительной позиции, абсолютной координаты и начальной координаты.
[00259] Необязательно, второй блок 340b позиционирования включает в себя первый подблок 340b1 позиционирования; или второй подблок 340b2 позиционирования.
[00260] Первый подблок 340b1 позиционирования выполнен с возможностью получать прямую линию AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате; определять фактическую координату на основе второй координатной точки B2 в абсолютной координате, прямой линии AB1 и двух из относительных позиций; и определять ориентацию на основе фактической координаты и, по меньшей мере, одной из относительных позиций.
[00261] Второй подблок 340b2 позиционирования выполнен с возможностью получать прямую линию AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате, и прямую линию AB2, которая проходит через координатную точку A начальной координаты и вторую координатную точку B2 в абсолютной координате, соответственно; определять ориентацию на основе прямой линии AB1, прямой линии AB2 и двух из относительных позиций; и определять фактическую координату на основе ориентации и, по меньшей мере, одной из относительных позиций.
[00262] Третий блок 340c позиционирования выполнен с возможностью, когда число изображений окружения равно 3 или больше, определять текущую ориентацию и фактическую координату пользователя на основе относительной позиции и абсолютной координаты.
[00263] Необязательно, третий блок 340c позиционирования включает в себя подблок 340c1 получения прямых линий, подблок 340c2 вычисления ориентации и подблок 340c3 вычисления координат.
[00264] Подблок 340c1 получения прямых линий выполнен с возможностью получать прямую линию AB1, которая проходит через координатную точку A начальной координаты и первую координатную точку B1 в абсолютной координате, прямую линию AB2, которая проходит через координатную точку A начальной координаты и вторую координатную точку B2 в абсолютной координате, и прямую линию AB3, которая проходит через координатную точку A начальной координаты и третью координатную точку B3 в абсолютной координате, соответственно.
[00265] Подблок 340c2 вычисления ориентации выполнен с возможностью определять ориентацию на основе прямой линии AB1, прямой линии AB2, прямой линии AB3 и трех из относительных позиций.
[00266] Подблок 340c3 вычисления координат выполнен с возможностью определять фактическую координату на основе ориентации и, по меньшей мере, одной из относительных позиций.
[00267] Необязательно, третий блок 340c позиционирования включает в себя подблок 340c4 обнаружения условий, подблок 340c5 поперечного связывания, подблок 340c6 получения вертикальных линий и подблок 340c7 определения результатов.
[00268] Подблок 340c4 обнаружения условий выполнен с возможностью обнаруживать то, удовлетворяют или нет три из относительных позиций предварительно установленному условию, которое представляет собой следующее: одна из относительных позиций представляет собой то, что объект находится непосредственно перед пользователем, другая из относительных позиций представляет собой то, что объект находится непосредственно слева от пользователя, и еще одна другая из относительных позиций представляет собой то, что объект находится непосредственно справа от пользователя.
[00269] Подблок 340c5 поперечного связывания выполнен с возможностью, если обнаруживается то, что предварительно установленное условие удовлетворяется, получать прямую линию B2B3, которая проходит через координатную точку B2, соответствующую абсолютной координате объекта с относительной позицией непосредственно слева от пользователя, и координатную точку B3, соответствующую абсолютной координате объекта с относительной позицией непосредственно справа от пользователя.
[00270] Подблок 340c6 получения вертикальных линий выполнен с возможностью получать вертикальную линию B1S между координатной точкой B1, соответствующей абсолютной координате объекта с относительной позицией непосредственно перед пользователем, и прямой линией B2B3.
[00271] Подблок 340c7 определения результатов выполнен с возможностью определять координату основания S перпендикуляра в качестве фактической координаты и определять направление от основания S перпендикуляра к координатной точке B1 в качестве ориентации.
[00272] Модуль 350 получения данных пункта назначения выполнен с возможностью получать координату назначения для пункта назначения, который должен быть достигнут пользователем.
[00273] Модуль 360 определения маршрутов выполнен с возможностью определять, по меньшей мере, один маршрут на основе координаты назначения и информации географической позиции.
[00274] Модуль 370 отображения навигационной информации выполнен с возможностью отображать информацию географической позиции, координату назначения и маршрут.
[00275] Если обобщать, в устройстве для позиционирования и навигации, предоставленном посредством настоящего варианта осуществления, посредством получения начальной координаты пользователя, получения предварительно установленного числа изображений окружения в пределах предварительно установленного географического диапазона, соответствующего начальной координате, и получения абсолютной координаты, соответствующей каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами, получения относительной позиции между объектом в изображении окружения и пользователем для каждого изображения окружения и определения информации текущей географической позиции пользователя на основе относительной позиции и абсолютной координаты, разрешается такая проблема в предшествующем уровне техники, что вес, размеры и стоимость изготовления электронного устройства увеличиваются вследствие использования аппаратных компонентов, таких как гироскоп или электронный компас, для того чтобы получать ориентацию пользователя. В устройстве для позиционирования и навигации, предоставленном посредством настоящего варианта осуществления, информация географической позиции, включающая в себя ориентацию пользователя, может получаться без установки аппаратных компонентов, таких как гироскоп или электронный компас, внутри электронного устройства, за счет чего могут уменьшаться вес и размеры электронного устройства, и может сокращаться стоимость изготовления.
[00276] Дополнительно, что касается различных чисел изображений окружения, настоящий вариант осуществления предоставляет множество способов для вычисления ориентации и фактической координаты пользователя, некоторые алгоритмы являются простыми и имеют высокую эффективность для позиционирования и навигации; некоторые алгоритмы определяют ориентацию и фактическую координату пользователя посредством усреднения двух или трех возможных вариантов ориентаций, с тем чтобы повышать стабильность результата вычисления; и некоторые алгоритмы обеспечивают тесное взаимодействие с пользователем. В фактических вариантах применения, различные способы вычисления могут приспосабливаться согласно различным требованиям.
[00277] Что касается устройства в вышеприведенном варианте осуществления, конкретные способы для выполнения операций посредством соответствующих модулей подробно описаны в вариантах осуществления способа, которые не описываются подробно в данном документе.
[00278] Фиг. 5 является блок-схемой, показывающей устройство для позиционирования и навигации согласно примерному варианту осуществления. Например, устройство 500 может представлять собой мобильный телефон, компьютер, цифровой широковещательный терминал, устройство для обмена сообщениями, игровую приставку, планшетный компьютер, медицинское устройство, тренажерное оборудование, персональное цифровое устройство и т.п.
[00279] Со ссылкой на фиг. 5, устройство 500 может включать в себя один или более из следующих компонентов: компонент 502 обработки, запоминающее устройство 504, компонент 506 питания, мультимедийный компонент 508, аудиокомпонент 510, интерфейс 512 ввода-вывода, сенсорный компонент 514 и компонент 516 связи.
[00280] Компонент 502 обработки типично полностью управляет работой устройства 500, к примеру, операциями, ассоциированными с отображением, телефонными вызовами, передачей данных, операциями камеры и операциями записи. Компонент 502 обработки может включать в себя один или более процессоров 520 для того, чтобы выполнять инструкции, чтобы выполнять все или часть этапов в вышеописанных способах. Кроме того, компонент 502 обработки может включать в себя один или более модулей, которые упрощают взаимодействие между компонентом 502 обработки и другими компонентами. Например, компонент 502 обработки может включать в себя мультимедийный модуль для того, чтобы упрощать взаимодействие между мультимедийным компонентом 508 и компонентом 502 обработки.
[00281] Запоминающее устройство 504 выполнено с возможностью сохранять различные типы данных для того, чтобы поддерживать работу устройства 500. Примеры таких данных включают в себя инструкции для любых приложений или способов, работающих на устройстве 500, контактные данные, данные телефонной книги, сообщения, изображения, видео и т.д. Запоминающее устройство 504 может реализовываться с использованием любого типа энергозависимых или энергонезависимых запоминающих устройств либо их комбинации, к примеру, как статическое оперативное запоминающее устройство (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитное запоминающее устройство, флэш-память, магнитный или оптический диск.
[00282] Компонент 506 питания предоставляет питание в различные компоненты устройства 500. Компонент 506 питания может включать в себя систему управления питанием, один или более источников питания, один или более режимов питания и другие компоненты, ассоциированные с формированием, управлением и распределением питания в устройстве 500.
[00283] Мультимедийный компонент 508 включает в себя экран, предоставляющий интерфейс вывода между устройством 500 и пользователем. В некоторых вариантах осуществления, экран может включать в себя жидкокристаллический дисплей (ЖК-дисплей) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, экран может быть реализован в качестве сенсорного экрана для того, чтобы принимать входные сигналы от пользователя. Сенсорная панель включает в себя один или более датчиков касания для того, чтобы считывать касания, проведения по экрану и жесты на сенсорной панели. Датчики касания могут не только считывать границу действия касания или проведения по экрану, но также и считывать период времени и давление, ассоциированное с действием касания или проведения по экрану. В некоторых вариантах осуществления, мультимедийный компонент 508 включает в себя фронтальную камеру и/или тыловую камеру. Фронтальная камера и тыловая камера могут принимать внешние мультимедийные данные в то время, когда устройство 500 находится в рабочем режиме, к примеру, в режиме фотосъемки или в видеорежиме. Каждая из фронтальной камеры и тыловой камеры может представлять собой систему с фиксированной оптической линзой либо иметь характеристики фокусировки и оптического масштабирования.
[00284] Аудиокомпонент 510 выполнен с возможностью выводить и/или вводить аудиосигналы. Например, аудиокомпонент 510 включает в себя микрофон (MIC), выполненный с возможностью принимать внешний аудиосигнал, когда устройство 500 находится в рабочем режиме, к примеру, в режиме вызова, в режиме записи и в режиме распознавания речи. Принимаемый аудиосигнал может быть дополнительно сохранен в запоминающем устройстве 504 или передан через компонент 516 связи. В некоторых вариантах осуществления, аудиокомпонент 510 дополнительно включает в себя динамик для того, чтобы выводить аудиосигналы.
[00285] Интерфейс 512 ввода-вывода предоставляет интерфейс между компонентом 502 обработки и периферийными интерфейсными модулями, такими как клавиатура, колесико с кнопками, кнопки и т.п. Кнопки могут включать в себя, но не только, кнопку перехода на домашнюю страницу, кнопку громкости, кнопку запуска и кнопку блокировки.
[00286] Сенсорный компонент 514 включает в себя один или более датчиков для того, чтобы предоставлять оценки состояния различных аспектов устройства 500. Например, сенсорный компонент 514 может обнаруживать открытое/закрытое состояние устройства, относительное позиционирование компонентов, например, дисплея и клавишной панели, устройства 500, изменение позиции устройства 500 или компонента устройства 500, присутствие или отсутствие контакта пользователя с устройством 500, ориентацию или ускорение/замедление устройства 500 и изменение температуры устройства 500. Сенсорный компонент 514 может включать в себя бесконтактный датчик, выполненный с возможностью обнаруживать присутствие находящих рядом объектов без физического контакта. Сенсорный компонент 514 также может включать в себя светочувствительный датчик, такой как CMOS- или CCD-датчик изображений, для использования в приложениях формирования изображений. В некоторых вариантах осуществления, сенсорный компонент 514 также может включать в себя датчик акселерометра, гиродатчик, магнитный датчик, датчик давления или температурный датчик.
[00287] Компонент 516 связи выполнен с возможностью упрощать связь, в проводном или в беспроводном режиме, между устройством 500 и другими устройствами. Устройство 500 может осуществлять доступ к беспроводной сети на основе стандарта связи, такого как Wi-Fi, 2G или 3G или комбинация вышеозначенного. В одном примерном варианте осуществления, компонент 516 связи принимает широковещательный сигнал или ассоциированную с широковещательной передачей информацию из внешней системы управления широковещательной передачей через широковещательный канал. В одном примерном варианте осуществления, компонент 516 связи дополнительно включает в себя модуль связи в поле в ближней зоне (NFC) для того, чтобы упрощать ближнюю связь. Например, NFC-модуль может реализовываться на основе технологии радиочастотной идентификации (RFID), технологии по стандарту Ассоциации по передаче данных в инфракрасном диапазоне (IrDA), технологии по стандарту сверхширокополосной связи (UWB), технологии Bluetooth (BT) и других технологий.
[00288] В примерных вариантах осуществления, устройство 500 может реализовываться с помощью одной или более специализированных интегральных схем (ASIC), процессоров цифровых сигналов (DSP), устройств обработки цифровых сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, для осуществления вышеописанных способов.
[00289] В примерных вариантах осуществления, также предусмотрен энергонезависимый машиночитаемый носитель хранения данных, включающий в себя инструкции, к примеру, включенные в запоминающее устройство 504, выполняемые посредством процессора 520 в устройстве 500, для осуществления вышеописанных способов. Например, энергонезависимый машиночитаемый носитель хранения данных может представлять собой ROM, RAM, CD-ROM, магнитную ленту, гибкий диск и оптическое устройство хранения данных и т.п.
[00290] Энергонезависимый машиночитаемый носитель хранения данных предоставляет возможность, когда инструкции на носителе хранения данных выполняются посредством процессора устройства 500, устройству 500 осуществлять способ для позиционирования и навигации, как показано посредством фиг. 1 или фиг. 2A.
[00291] Другие варианты осуществления изобретения должны быть очевидными для специалистов в области техники из изучения технического описания и практического применения изобретения, раскрытого в данном документе. Эта заявка имеет намерение охватывать все изменения, варианты использования или адаптации изобретения согласно его общим принципам, в том числе такие отклонения от настоящего раскрытия сущности, которые попадают в рамки известной или общепринятой практики в данной области техники. Данное подробное описание и варианты осуществления должны рассматриваться только как примерные, при этом истинный объем и сущность изобретения указывается посредством прилагаемой формулы изобретения.
[00292] Следует принимать во внимание, что настоящее изобретение не ограничено точной структурой, которая описана выше и проиллюстрирована на прилагаемых чертежах, и что различные модификации и изменения могут вноситься без отступления от его объема. Подразумевается, что объем изобретения должен быть ограничен только посредством прилагаемой формулы изобретения.
Реферат
Изобретение относится к области приборостроения и может найти применение в устройствах и системах позиционирования и навигации, обеспечивающих задачи картографического позиционирования. Технический результат – расширение функциональных возможностей. Для этого обеспечивают: получение начальной координаты пользователя; получение предварительно установленного числа изображений окружения в пределах установленного географического диапазона, соответствующего начальной координате, и получение абсолютной координаты, соответствующей каждому изображению окружения, из предварительно установленного отношения соответствия между различными изображениями окружения и различными абсолютными координатами; получение относительной позиции между объектом на изображении окружения и пользователем для каждого изображения окружения; и определение информации географической позиции пользователя на основе относительной позиции и абсолютной координаты. В технических решениях вариантов осуществления способа, информация географической позиции пользователя может быть сформирована без установки аппаратных средств, таких как гироскоп или электронный компас, внутри электронного устройства, за счет чего могут уменьшаться вес, размеры и стоимость изготовления электронного устройства. 3 н. и 14 з.п. ф-лы, 5 ил.
Комментарии