Способ содействия вождению и устройство содействия вождению - RU2760714C1
Код документа: RU2760714C1
Чертежи








Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу содействия вождению и устройству содействия вождению.
Уровень техники
[0002] Устройство определения положения задействуемого транспортного средства, которое сравнивает форму дорожной разметки, которая присутствует в непосредственной близости от задействуемого транспортного средства и которая распознается на основе фотографической информации от фотографического устройства, прикрепленного к задействуемому транспортному средству, с формой дорожной разметки, которая включена в картографическое изображение для корректировки тем самым абсолютного положения задействуемого транспортного средства, известно из предшествующего уровня техники (например, см. Патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Опубликованная заявка на патент Японии № 2015-114126
Сущность изобретения
Проблема, решаемая изобретением
[0004] На данный момент, с помощью обычного устройства определения положения задействуемого транспортного средства, необходимо распознавать форму дорожной разметки на основе фотографической информации, чтобы скорректировать абсолютное положение задействуемого транспортного средства. Однако существуют случаи, в которых не всегда возможно скорректировать абсолютное положение задействуемого транспортного средства, потому что информация о форме дорожной разметки, необходимая для коррекции, не всегда включена в фотографическую информацию. В частности, во время следования за каким-либо транспортным средством во время дорожного затора задействуемое транспортное средство будет приближаться к впередиидущему транспортному средству, которое движется непосредственно перед задействуемым транспортным средством, следуя за впередиидущим транспортным средством ближе, чем во время обычного движения (когда нет дорожного затора). Следовательно, существует вероятность того, что дорожная разметка будет скрыта впередиидущим транспортным средством, и дорожная разметка не сможет быть надлежащим образом сфотографирована посредством использования фотографирующего устройства, так что возможность внести коррекцию будет потеряна.
[0005] Учитывая проблему, описанную выше, цель настоящего раскрытия состоит в том, чтобы предоставить способ содействия вождению и устройство содействия вождению, которые смогут снизить вероятность упущения возможности скорректировать положение задействуемого транспортного средства, установленное в картографических данных.
Средство для решения проблемы
[0006] Чтобы реализовать описанную выше задачу, настоящее раскрытие представляет собой способ содействия вождению, использующий контроллер, который устанавливает целевое расстояние между транспортными средствами от задействуемого транспортного средства до впередиидущего транспортного средства, движущегося непосредственно перед задействуемым транспортным средством.
[0007] В данном случае контроллер определяет, имеется ли запрос на выполнение коррекции положения задействуемого транспортного средства, установленного в картографических данных, что выполняется на основе результата сравнения информации, относящейся к цели, описанной в картографических данных, с информацией, относящейся к цели, полученной посредством использования бортового датчика, установленного в задействуемом транспортном средстве. После определения того, что запрос на выполнение не был сделан, целевое расстояние между транспортными средствами устанавливается в первое целевое расстояние между транспортными средствами, которое было установлено заранее. Если, с другой стороны, определено, что запрос на выполнение был сделан, то целевое расстояние между транспортными средствами устанавливается во второе целевое расстояние между транспортными средствами, которое больше первого целевого расстояния между транспортными средствами.
Полезные эффекты изобретения
[0008] Следовательно, в настоящем раскрытии можно снизить вероятность упущения возможности скорректировать положение задействуемого транспортного средства, установленное в картографических данных.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009]
На фиг.1 представлен общий вид системы, иллюстрирующий систему автоматического управления движением, к которой применены способ содействия вождению и устройство содействия вождению согласно первому варианту осуществления.
На Фиг.2 представлена блок-схема управления, иллюстрирующая контроллер режима положения, предусмотренный в блоке автоматического управления движением.
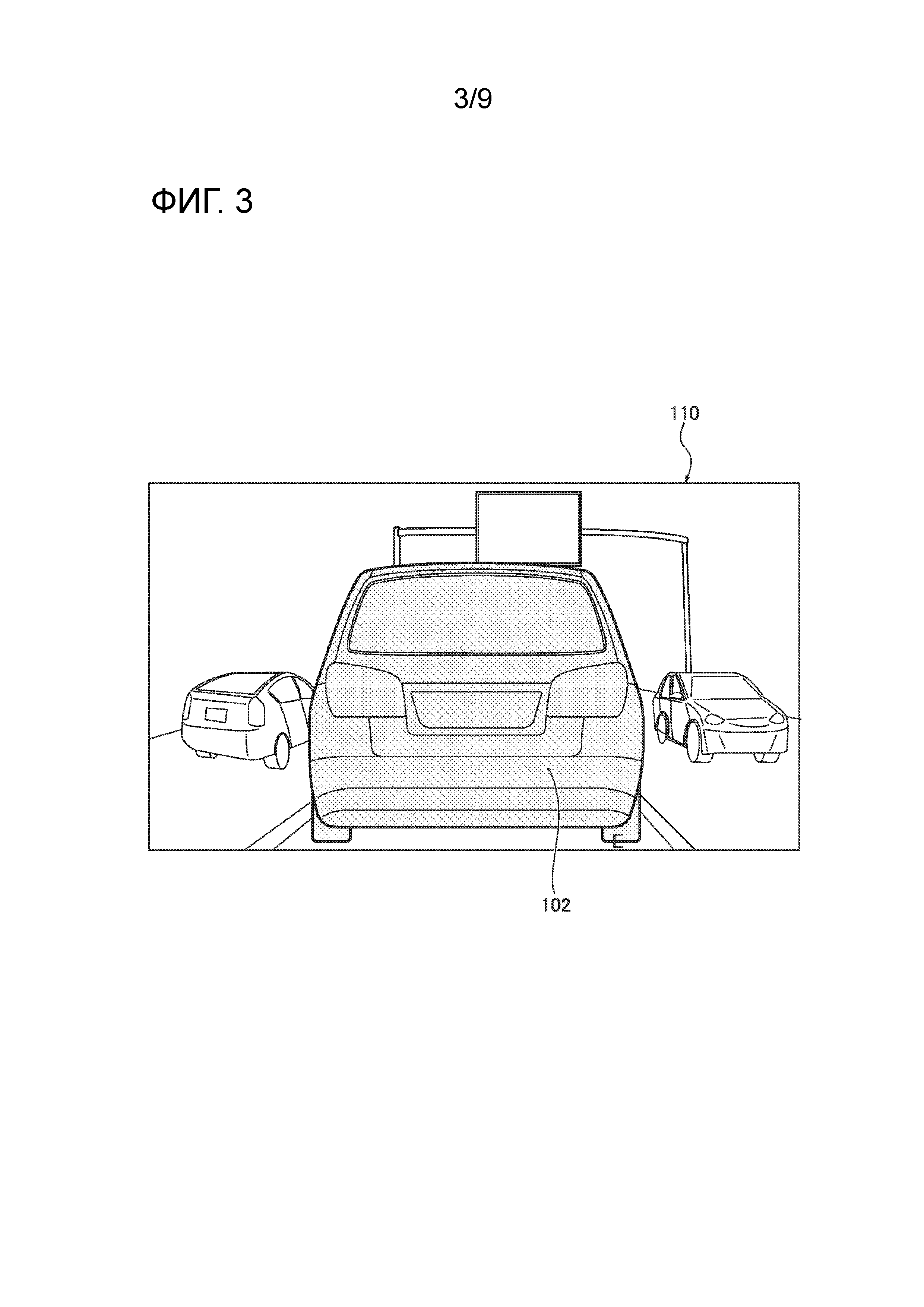
На Фиг.3 представлен пояснительный вид, иллюстрирующий фотографическое изображение, снятое передней камерой распознавания.
На фиг.4 представлена блок-схема, иллюстрирующая последовательность операций управления выбором режима положения, выполняемого в контроллере режима положения, согласно первому варианту осуществления.
На Фиг.5 представлена блок-схема, иллюстрирующая последовательность операций управления определением дорожного затора, выполняемого в блоке определения дорожного затора согласно первому варианту осуществления.
На Фиг.6A представлен пояснительный вид, иллюстрирующий дальность фотографирования, когда впередиидущее транспортное средство является обычным легковым автомобилем, а расстояние между транспортными средствами является первым целевым расстоянием между транспортными средствами.
На Фиг.6B представлен первый пояснительный вид, иллюстрирующий дальность фотографирования, когда впередиидущее транспортное средство является большим грузовиком, а расстояние между транспортными средствами является первым целевым расстоянием между транспортными средствами.
На Фиг.6C представлен второй пояснительный вид, иллюстрирующий дальность фотографирования, когда впередиидущее транспортное средство является большим грузовиком, а расстояние между транспортными средствами является первым целевым расстоянием между транспортными средствами.
На Фиг.6D представлен третий пояснительный вид, иллюстрирующий дальность фотографирования, когда впередиидущее транспортное средство является большим грузовиком, а расстояние между транспортными средствами является первым целевым расстоянием между транспортными средствами.
На Фиг.6E представлен пояснительный вид, иллюстрирующий дальность фотографирования, когда впередиидущее транспортное средство является большим грузовиком, а расстояние между транспортными средствами является вторым целевым расстоянием между транспортными средствами.
На Фиг.7 представлен пояснительный вид, поясняющий действие по увеличению вероятности обнаружения цели в сценарии, в котором запрос на коррекцию собственного местоположения делается во время последующего движения в дорожном заторе.
Фиг.8 представлен пояснительный вид, поясняющий действие по увеличению вероятности обнаружения цели в сценарии, в котором оцененная погрешность положения превышает пороговую погрешность.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0010] Вариант осуществления для реализации способа содействия вождению и устройства содействия вождению согласно настоящему раскрытию будет описан ниже на основе первого варианта осуществления, проиллюстрированного на чертежах.
[0011] (Первый вариант осуществления)
Способ содействия вождению и устройство содействия вождению согласно первому варианту осуществления применяются к транспортному средству с автоматическим вождением (один пример транспортного средства с содействием вождению), в котором движение, торможение и угол поворота управляются автоматически, с тем чтобы двигаться по созданному целевому маршруту движения при выборе режима автоматического вождения. «Общая конфигурация системы», «конфигурация блока управления контроллера режима положения», «конфигурация процесса управления выбором режима положения» и «конфигурация процесса управления определением дорожного затора» будут описаны отдельно ниже в отношении конфигурация первого варианта осуществления.
[0012] Общая конфигурация системы первого варианта осуществления будет описана ниже со ссылкой на Фиг.1.
[0013] Система 10 автоматического вождения содержит бортовой датчик 1, блок 2 хранения картографических данных, внешнее устройство 3 обмена данными, блок 4 автоматического управления движением, исполнительный механизм 5 и устройство 6 HMI.
[0014] Бортовой датчик 1 включает в себя камеру 11, радар 12, GPS 13 и бортовое устройство 14 обмена данными. Информация датчика (информация об окружении задействуемого транспортного средства), полученная посредством использования бортового датчика 1, выводится в блок 4 автоматического управления движением. Бортовой датчик 1 включает в себя датчики для получения информации о задействуемом транспортном средстве, такой как скорость транспортного средства, степень открытия акселератора, угол поворота рулевого колеса и т.п.
[0015] Камера 11 представляет собой датчик распознавания периферийной окружающей среды, который реализует функцию сбора на основе данных изображения, полученных посредством фотографирования, информации об окружающей среде задействуемого транспортного средства, например, касаемо полос движения, впередиидущих транспортных средств, пешеходов и т.п. как функцию, необходимую для автоматического вождения. Эта камера 11 выполнена, например, посредством объединения передней камеры распознавания, задней камеры распознавания, правой камеры распознавания, левой камеры распознавания и т.п.
[0016] Камера 11 обнаруживает информацию об окружении задействуемого транспортного средства, такую как объекты на пути движения задействуемого транспортного средства, такие как дорожная разметка, белые линии дорог, границы дорог, стоп-линии, пешеходные переходы, бордюры и т.п., а также объекты за пределами пути движения задействуемого транспортного средства, такие как дорожные конструкции, впередиидущие транспортные средства, идущие позади транспортные средства, встречные транспортные средства, окружающие транспортные средства, пешеходы, велосипеды, двухколесные транспортные средства, дорожные знаки, светофоры, информационные табло и т.п. Камера 11 имеет дальность фотографирования, которая определяется углом обзора объектива, и эта дальность фотографирования становится дальностью обнаружения, из которой может быть получена информация о цели. Здесь «цель» - это среди объектов, описанных в картографических данных, объект, который выступает в качестве ссылки при корректировке положения задействуемого транспортного средства в картографических данных. В частности, объектом, информация о положении которого является точкой и который может использоваться в качестве опорного объекта для корректировки собственного местоположения, являются, например, дорожные знаки, стоп-линии, белые дорожные линии, которые нанесены в точке слияния и простираются в направлениях, отличается от линий движения, дорожные вывески и т.п.
[0017] Радар 12 является датчиком дальности, который реализует функцию обнаружения присутствия объекта в непосредственной близости от задействуемого транспортного средства с использованием выходных радиоволн и функцию определения расстояния до объекта в непосредственной близости от задействуемого транспортного средства, в качестве функций, необходимых для автоматического вождения. То есть, радар 12 обнаруживает информацию о положении объектов на пути движения задействуемого транспортного средства и объектов за пределами пути движения задействуемого транспортного средства, а также информацию о расстоянии от задействуемого транспортного средства до каждого из объектов. Радар 12 имеет дальность, из которой могут быть обнаружены объекты, которая определяется дальностью выходных радиоволн, и эта дальность обнаружения становится дальностью обнаружения, из которой может быть получена информация о цели.
[0018] Здесь «радар 12» - это общий термин, который включает в себя радары, использующие радиоволны, лидары, использующие свет, и сонары, использующие ультразвуковые волны. Примеры радара 12, который можно использовать, включают в себя лазерный радар, радар миллиметровых волн, ультразвуковой радар, лазерный дальномер и т.п. Данный радар 12 выполнен, например, посредством объединения переднего радара, заднего радара, правого радара, левого радара и т.п.
[0019] GPS 13 - это датчик положения задействуемого транспортного средства, который имеет антенну 13a GNSS и который определяет информацию о положении задействуемого транспортного средства (широту и долготу) посредством использования спутниковой связи. «GNSSS» - это аббревиатура от «Global Navigation Satellite System» ("Глобальная навигационная спутниковая система"), а «GPS» - от «Global Positioning System» ("Система глобального позиционирования"). Кроме того, точность определения положения задействуемого транспортного средства у GPS 13 может снижаться в местах с относительно большим количеством зданий и туннелей. Следовательно, в таких случаях информация о положении задействуемого транспортного средства вычисляется и оценивается на основе информации от камеры 11, радара 12 и точного расчета в блоке 4 автоматического управления движением.
[0020] Бортовое устройство 14 обмена данными представляет собой внешний датчик данных, который осуществляет беспроводную связь с внешним устройством 3 обмена данными через приемопередающие антенны 3a, 14a, чтобы, таким образом, получать информацию извне, которую иначе не может получить задействуемое транспортное средство.
[0021] Например, в случае устройства обмена данными, установленного в другом транспортном средстве, движущемся поблизости от задействуемого транспортного средства, внешнее устройство 3 обмена данными осуществляет связь по типу "транспортное средство - транспортное средство" между задействуемым транспортным средством и другим транспортным средством, и среди различных частей информации, хранящейся в другом транспортном средстве, получает информацию, необходимую для задействуемого транспортного средства, по запросу от бортового устройства 14 обмена данными. Кроме того, например, в случае устройства обмена данными, предусмотренного в инфраструктурном оборудовании, внешнее устройство 3 обмена данными выполняет инфраструктурную связь между задействуемым транспортным средством и инфраструктурным оборудованием, а также из различных частей информации, хранящихся в инфраструктурном оборудовании, получает информацию, необходимую для задействуемого транспортного средства, по запросу от бортового устройства 14 обмена данными. Информация, полученная посредством использования внешнего устройства 3 обмена данными, выводится в блок 4 автоматического управления движением через бортовое устройство 14 обмена данными.
[0022] То есть, например, если имеется недостаточная информация в картографических данных, хранящихся в блоке 2 хранения картографических данных, или информация, которая была обновлена из картографических данных, блок 4 автоматического управления движением может дополнить недостаточную информацию или обновленную информацию посредством связи с внешним устройством с внешним устройством 3 обмена данными. Также возможно получить информацию о дорожном движении, такую как информацию о дорожных заторах и информацию об ограничениях движения, для целевого маршрута движения, по которому планируется движение задействуемого транспортного средства.
[0023] Блок 2 хранения картографических данных (картографические данные) состоит из встроенной памяти, в которой хранятся так называемые электронные картографические данные, в которых картографическая информация связана с информацией о положении, обозначенной широтой и долготой.
[0024] Здесь картографические данные GPS и трехмерные картографические данные высокой точности (динамическая карта) хранятся в блоке 2 хранения картографических данных. Картографические данные GPS используются для обычного ведения по маршруту. С другой стороны, трехмерные картографические данные высокой точности содержат трехмерную пространственную информацию, которая даже более точна, чем картографические данные GPS, - точность, с которой можно распознать, по меньшей мере, каждую полосу дороги, имеющую множество полос движения. Используя такие картографические данные высокой точности, можно установить целевой маршрут движения, указывая, по какой полосе движения, из множества полос движения, будет двигаться задействуемое транспортное средство посредством использования автоматического вождения, и установить положение остановки и целевое положение движения в направлении ширины транспортного средства в пределах одной полосы движения.
[0025] Кроме того, картографическая информация, описанная в электронных картографических данных, включает в себя информацию о дороге, связанную с каждой точкой. Информация о дороге задается узлами и соединительными линиями дорог, которые соединяют узлы. Кроме того, картографическая информация, описанная в электронных картографических данных, включает в себя информацию, относящуюся к целям (дорожные знаки, дорожная разметка, белые линии дорог, границы дорог, стоп-линии, пешеходные переходы и т.д.), нанесенные на поверхность дороги или обочины пути движения задействуемого транспортного средства. Здесь, в дополнение к информации о положении для каждой цели, электронные картографические данные также могут хранить связанную информацию, отличную от информации о положении, например, информацию о форме и размерах.
[0026] Когда положение задействуемого транспортного средства, обнаруженное посредством GPS 13, или положение задействуемого транспортного средства, оцененное посредством вычислений, распознается как информация о положении задействуемого транспортного средства, блок 4 автоматического управления движением делает запрос к блоку 2 хранения картографических данных на электронные картографические данные вокруг положения задействуемого транспортного средства на основе распознанной информации о положении задействуемого транспортного средства, чтобы таким образом получить необходимые электронные картографические данные. Затем положение задействуемого транспортного средства устанавливается на полученных электронных картографических данных. Кроме того, блок 4 автоматического управления движением объединяет полученные электронные картографические данные и информацию, введенную бортовым датчиком 1, и т.п. (информацию о задействуемом транспортном средстве, информацию о положении задействуемого транспортного средства, информацию об окружении задействуемого транспортного средства, информацию о пункте назначения и тому подобное), для создания целевого маршрута движения, профиля целевой скорости транспортного средства (включающего в себя профиль ускорения и профиль замедления) и т.п.
[0027] Когда создан целевой маршрут движения, блок 4 автоматического управления движением выдает команду управления движением или команду управления остановкой, так что транспортное средство движется по целевому маршруту движения, и вычисляет требуемое значение команды движения, значение команды торможения, и значение команды угла поворота рулевого колеса. Различные типы значений команд, вычисляемые блоком 4 автоматического управления движением, выводятся из блока 4 автоматического управления движением в каждый исполнительный механизм 51-53, и задействуемое транспортное средство движется по заданному маршруту движения, тем самым управляя собственной скоростью транспортного средства и рулением транспортным средством. Здесь, в частности, блок 4 автоматического управления движением выводит результат вычисления значения команды движения в исполнительный механизм 51 привода, выводит результат вычисления значения команды торможения в исполнительный механизм 52 торможения и выводит результат вычисления значения команды угла поворота рулевого колеса в исполнительный механизм 53 угла поворота рулевого колеса.
[0028] Кроме того, блок 4 автоматического управления движением сравнивает информацию о положении целей, хранящуюся в электронных картографических данных, с информацией о положении цели, полученной из данных изображения, сфотографированных камерой 11 бортового датчика 1, установленного в задействуемом транспортном средстве. Затем, на основе результатов сравнения, положение задействуемого транспортного средства, установленное в электронных картографических данных, корректируется (в дальнейшем именуемое «коррекцией собственного местоположения»). Эта коррекция собственного местоположения выполняется посредством вывода запроса на выполнение коррекции собственного местоположения, который периодически выводится. Кроме того, положение задействуемого транспортного средства, установленное в электронных картографических данных, представляется водителю вместе с изображением карты, например, через устройство 6 HMI.
[0029] Исполнительный механизм 5 представляет собой управляющий исполнительный механизм, который выполняет управление скоростью транспортного средства и управление рулевым управлением задействуемого транспортного средства, и включает в себя исполнительный механизм 51 привода, исполнительный механизм 52 торможения и исполнительный механизм 53 угла поворота рулевого колеса.
[0030] Исполнительный механизм 51 привода принимает значения команды движения, введенные от блока 4 автоматического управления движением, и управляет движущей силой, которая выводится на ведущие колеса. Примеры исполнительного механизма 51 привода, который может использоваться, включают в себя двигатель в случае транспортного средства с приводом от двигателя, двигатель и мотор-генератор (работающий на электрической мощности) в случае гибридного транспортного средства, а также мотор-генератор (работающий на электрической мощности) в случае электромобиля.
[0031] Исполнительный механизм 52 торможения принимает значения команды движения, введенные от блока 4 автоматического управления движением, и управляет силой торможения, которая выводится на ведущие колеса. Примеры исполнительного механизма 52 торможения, который можно использовать, включают в себя гидроусилитель, электрический усилитель, исполнительный механизм давления тормозной жидкости, исполнительный механизм торможения двигателем и двигатель-генератор (рекуперация).
[0032] Исполнительный механизм 53 угла поворота рулевого колеса принимает значения команды угла поворота рулевого колеса, введенные от блока 4 автоматического управления движением, и управляет углом поворота управляемых колес. Примеры исполнительного механизма 53 угла поворота рулевого колеса, который может быть использован, включают в себя двигатель рулевого управления и т.п., который предусмотрен в системе передачи усилия рулевого управления в системе рулевого управления.
[0033] Устройство 6 HMI предоставляет информацию водителю и пассажирам, например, о том, где на карте движется задействуемое транспортное средство во время автоматического вождения. «HMI» - это аббревиатура от «Human Machine Interface» («человеко-машинного интерфейса»). Устройство 6 HMI представляет собой, например, HUD (Head-Up Display (Дисплей на голове)), приборную панель, монитор навигации (монитор внутри автомобиля) и т.д., одно или более из которых могут быть объединены.
[0034] Затем, блок 4 автоматического управления движением согласно первому варианту осуществления имеет контроллер 40 режима положения (контроллер), который включает в себя CPU (центральный блок управления), носитель данных и т.п., и который выполняет управление выбором режима положения для установки целевого расстояния между транспортными средствами от задействуемого транспортного средства до впередиидущего транспортного средства, движущегося непосредственно перед задействуемым транспортным средством.
[0035] Конфигурация блока управления контроллера 40 режима положения будет описана ниже на основе Фиг.2.
[0036] Как показано на Фиг.2, контроллер 40 режима положения включает в себя блок 41 определения запроса, блок 42 определения периода невозможности коррекции, блок 43 прогнозирования обнаружения цели, блок 44 определения дорожного затора, блок 45 оценки погрешности положения и блок 46 выбора режима положения (блок установки целевого расстояния между транспортными средствами).
[0037] На основе наличия или отсутствия запроса на выполнение коррекции собственного местоположения, выводимого из блока 4 автоматического управления движением, блок 41 определения запроса определяет, имеется ли запрос на выполнение, и выводит информацию определения запроса. Выводимая информация определения запроса вводится в блок 42 определения периода невозможности коррекции и блок 46 выбора режима положения. Здесь, если запрос на выполнение коррекции собственного местоположения был введен, блок 41 определения запроса устанавливает флаг запроса в «1». Кроме того, после того, как управление коррекцией на основе запроса на выполнение коррекции собственного местоположения было запущено, если определено, что выполнение коррекции собственного местоположения было завершено, или определено, что выполнение коррекции собственного местоположения не будет завершено в течение предписанного периода времени с вывода запроса на выполнение коррекции собственного местоположения, блок 41 определения запроса устанавливает флаг запроса в «ноль». Затем, когда этот флаг запроса установлен в «1», блок 41 определения запроса выводит информацию определения запроса о том, что имеется запрос на выполнение коррекции собственного местоположения. С другой стороны, когда этот флаг запроса установлен в «ноль», блок 41 определения запроса выводит информацию определения запроса, что нет запроса на выполнение коррекции собственного местоположения.
[0038] Когда информация определения запроса о том, что «имеется запрос на выполнение коррекции собственного местоположения», вводится из блока 41 определения запроса, блок 42 определения периода невозможности коррекции сравнивает период, в течение которого коррекция собственного местоположения не может быть выполнена (в дальнейшем именуется как «период невозможности коррекции») с пороговым периодом, который был установлен заранее. Затем определяется, продолжался ли период невозможности коррекции в течение порогового периода или дольше, и выводится информация о периоде невозможности коррекции. Выводимая информация о периоде невозможности коррекции вводится в блок 43 прогнозирования обнаружения цели и блок 46 выбора режима положения. Здесь, когда запрос на выполнение для коррекции собственного местоположения вводится из блока 4 автоматического управления движением в состоянии, в котором период невозможности коррекции равен нулю, блок 42 определения периода невозможности коррекции начинает отсчет времени. Это отсчитанное время становится «периодом невозможности коррекции».
[0039] После начала отсчета период невозможности коррекции непрерывно отсчитывается до тех пор, пока выполнение коррекции собственного местоположения не будет завершено, и возвращается в нуль после завершения выполнения коррекции собственного местоположения. Таким образом, «период невозможности коррекции» - это период с момента, когда запрос на выполнение коррекции собственного местоположения появляется в состоянии, в котором период невозможности коррекции равен нулю, до того момента, когда выполнение коррекции собственного местоположения завершено. По этой причине, даже если запрос на выполнение коррекции собственного местоположения появляется снова во время отсчета периода невозможности коррекции, период невозможности коррекции продолжает отсчитываться до тех пор, пока выполнение коррекции собственного местоположения не будет завершено.
[0040] Когда информация о периоде невозможности коррекции, что «период невозможности коррекции продолжался в течение порогового периода или дольше», вводится из блока 42 определения периода невозможности коррекции, блок 43 прогнозирования обнаружения цели определяет, была ли обнаружена цель, такая как дорожный знак, описанный в электронных картографических данных находящимся в пределах предписанной дальности в непосредственной близости от положения задействуемого транспортного средства, на основе данных изображения, сфотографированных камерой 11 бортового датчика 1 во время выполнения коррекции собственного местоположения, начатой на основе запроса на выполнение, и выводит информацию об обнаружении цели. То есть определяется, действительно ли сфотографирована цель, которую, согласно прогнозам, можно сфотографировать с задействуемого транспортного средства, на основе электронных картографических данных. Выводимая информация об обнаружении цели вводится в блок 44 определения дорожного затора и блок 45 оценки погрешности положения.
[0041] Здесь блок 43 прогнозирования обнаружения цели сначала получает электронные картографические данные в предписанной дальности вокруг положения задействуемого транспортного средства, установленного в электронных картографических данных. Затем цель, которая может быть обнаружена бортовым датчиком 1 (камерой 11), прогнозируется и указывается среди объектов, описанных в полученных электронных картографических данных. Таким образом, указанная здесь цель является целью, которая перекрывает фотографируемую дальность (дальность обнаружения) камеры 11, которая определяется на основе положения задействуемого транспортного средства, установленного в электронных картографических данных. Когда цель указана, данные изображения, фактически сфотографированные камерой 11, анализируются, и определяется, включена ли указанная цель в данные изображения, то есть было ли возможно сфотографировать указанную цель посредством использования камеры 11. Когда указанная цель включена в данные изображения, блок 43 прогнозирования обнаружения цели выводит информацию об обнаружении цели, указывающую, что цель, спрогнозированная как подлежащая обнаружению, действительно была обнаружена. С другой стороны, когда указанная цель не включена в данные изображения, блок 43 прогнозирования обнаружения цели выводит информацию об обнаружении цели, указывающую, что цель не может быть фактически обнаружена.
[0042] Когда информация об обнаружении цели, указывающая, что «цель, спрогнозированная как подлежащая обнаружению, была фактически обнаружена», вводится из блока 43 прогнозирования обнаружения цели, блок 44 определения дорожного затора определяет, имеется ли дорожный затор на полосе движения, в которой движется задействуемое транспортное средство и выводит информацию о дорожном заторе. Выводимая информация о дорожном заторе вводится в блок 46 выбора режима положения. Здесь, когда осуществляются перечисленные ниже определения, блок 44 определения дорожного затора выводит информацию о дорожном заторе, указывающую, что имеется дорожный затор. С другой стороны, если перечисленные ниже определения не могут быть осуществлены, то выводится информация о дорожном заторе, указывающая на отсутствие дорожного затора.
• Состояние, в котором скорость задействуемого транспортного средства равна или ниже предписанной скорости транспортного средства, продолжалось в течение, по меньшей мере, предписанного предварительно установленного периода времени (далее именуемого «первое время определения дорожного затора»).
• Предписанная дальность или более из сфотографированного изображения (дальность обнаружения) камеры 11 бортового датчика 1 загорожена впередиидущим транспортным средством, движущимся непосредственно впереди задействуемого транспортного средства.
• Состояние, в котором расстояние между транспортными средствами от задействуемого транспортного средства до впередиидущего транспортного средства, движущегося непосредственно перед задействуемым транспортным средством, стало предписанным расстоянием или меньше, продолжалось в течение, по крайней мере, предписанного предварительно установленного периода времени (далее именуемого «второе время определения дорожного затора»).
Следует отметить, что «предписанная дальность или более из сфотографированного изображения загорожена впередиидущим транспортным средством» означает состояние, в котором по отношению к области 110 сфотографированного изображения, показанной на фиг.3, соотношение, занятое областью изображения (областью, окрашенной точками на Фиг.3) впередиидущего транспортного средства 102, движущегося непосредственно перед задействуемым транспортным средством, является предписанным соотношением или превышает его.
[0043] Когда информация об обнаружении цели, указывающая, что «цель, спрогнозированная как обнаруживаемая, не может быть фактически обнаружена», вводится из блока 43 прогнозирования обнаружения цели, блок 45 оценки погрешности положения определяет, был ли «режим большого расстояния между транспортными средствами» уже выбран в качестве режима положения блоком 46 выбора режима положения на основе информации, введенной из блока 46 выбора режима положения. Затем, если определено, что «режим большого расстояния между транспортными средствами» уже был выбран в качестве режима положения, определяется, является ли оцененная погрешность положения между истинным положением задействуемого транспортного средства и положением задействуемого транспортного средства, установленным в электронных картографических данных, больше или равна предварительно установленной пороговой погрешности, и выводится оцененная погрешность положения. Выводимая информация определения режима и информация об оцененной погрешности вводятся в блок 46 выбора режима положения.
[0044] Здесь блок 45 оценки погрешности положения прогнозирует оцененную погрешность положения в соответствии с длительностью периода невозможности коррекции. То есть, как правило, оцененная погрешность положения увеличивается, когда период невозможности коррекции становится длиннее. Следовательно, когда период невозможности коррекции меньше установленного заранее предварительно установленного периода определения погрешности, блок 45 оценки погрешности положения выводит информацию об оцененной погрешности о том, что оцененная погрешность положения меньше пороговой погрешности. С другой стороны, если период невозможности коррекции больше или равен предварительно установленному периоду определения погрешности, определяется, что между истинным положением задействуемого транспортного средства и положением задействуемого транспортного средства, установленным в электронных картографических данных, произошла погрешность, превышающая предполагаемую величину погрешности, и выводится информация об оцененной погрешности о том, что оцененная погрешность положения больше или равна пороговой погрешности. Когда определено, что «режим большого расстояния между транспортными средствами» не был выбран в качестве режима положения, установленного блоком 46 выбора режима положения, блок 45 оценки погрешности положения также выводит информацию об оцененной погрешности, что оцененная погрешность положения меньше чем пороговая погрешность.
[0045] Блок 46 выбора режима положения выбирает режим положения на основе информации определения запроса из блока 41 определения запроса, информации периода невозможности коррекции из блока 42 определения периода невозможности коррекции, информации о дорожном заторе из блока 44 определения дорожного затора и информации об оцененной погрешности из блока 45 оценки погрешности положения, и устанавливает на основе выбранного режима положения целевое расстояние между транспортными средствами от задействуемого транспортного средства до впередиидущего транспортного средства, движущегося непосредственно перед задействуемое транспортное средство, и целевую полосу, по которой задействуемое транспортное средство предписывается двигаться. Блок 4 автоматического управления движением вычисляет требуемое значение команды движения, значение команды торможения и значение команды угла поворота рулевого колеса, чтобы реализовать установленное целевое расстояние между транспортными средствами и целевую полосу движения. Различные типы значений команд, вычисляемых блоком 4 автоматического управления движением, выводятся из блока 4 автоматического управления движением в каждый из исполнительных механизмов 51-53, и управление скоростью транспортного средства и управление рулевым управлением выполняются таким образом, чтобы расстояние между транспортными средствами и полоса движения соответствовали целям. Выбранный режим положения поддерживает текущее выбранное состояние до тех пор, пока не будет выбран новый режим положения.
[0046] Здесь, когда вводится информация, перечисленная ниже, блок 46 выбора режима положения выбирает «обычный режим» в качестве режима положения.
• Когда информация определения запроса о том, что «отсутствует запрос на выполнение коррекции собственного местоположения», вводится из блока 41 определения запроса.
• Когда информация о периоде невозможности коррекции, о том, что «период невозможности коррекции не продолжался в течение порогового периода или дольше», вводится из блока 42 определения периода невозможности коррекции.
• Когда информация о дорожном заторе о том, что «на полосе движения, по которой движется задействуемое транспортное средство, нет дорожного затора», вводится из блока 44 определения дорожного затора.
[0047] Кроме того, когда вводится информация, перечисленная ниже, блок 46 выбора режима положения выбирает «режим большого расстояния между транспортными средствами» в качестве режима положения.
• Когда информация о дорожном заторе о том, что «на полосе движения, по которой движется задействуемое транспортное средство, имеется дорожный затор», вводится из блока 44 определения дорожного затора.
• Когда информация об оцененной погрешности, что «оцененная погрешность положения меньше пороговой погрешности», вводится из блока 45 оценки погрешности положения.
[0048] Дополнительно, когда вводится информация ниже, блок 46 выбора режима положения выбирает «режим потери положения» в качестве режима положения.
• Когда информация об оцененной погрешности, что «оцененная погрешность положения больше или равна пороговой погрешности», вводится из блока 45 оценки погрешности положения.
[0049] Затем, когда «обычный режим» выбирается в качестве режима положения, целевая полоса, по которой должно двигаться задействуемое транспортное средство, устанавливается в полосу, по которой движется задействуемое транспортное средство (полосу движения задействуемого транспортного средства), и целевое расстояние между транспортными средствами устанавливается в первое целевое расстояние между транспортными средствами, которое устанавливается заранее на основе относительной разницы скоростей транспортного средства с впередиидущим транспортным средством, погоды, типа дороги и т.п. Когда в качестве режима положения выбран «режим большого расстояния между транспортными средствами», целевая полоса устанавливается в полосу движения задействуемого транспортного средства, а целевое расстояние между транспортными средствами устанавливается во второе целевое расстояние между транспортными средствами, которое больше, чем первое целевое расстояние между транспортными средствами. Здесь второе целевое расстояние между транспортными средствами установлено в 1,5 раза больше первого целевого расстояния между транспортными средствами.
[0050] Когда в качестве режима положения выбран «режим потери положения», целевая полоса устанавливается в самую дальнюю слева (крайнюю левую полосу) на дороге, по которой движется задействуемое транспортное средство, и целевое расстояние между транспортными средствами устанавливается в первое целевое расстояние между транспортными средствами. Здесь, в случае левостороннего движения, цели, такие как дорожные знаки, размещаются с левой стороны дороги. Кроме того, высока вероятность того, что выезд с автомагистрали или полоса слияния предусмотрены на левой стороне дороги и что присутствует белая линия дороги, идущая в направлении, отличном от полос движения. Кроме того, перейдя в крайнюю левую полосу движения, можно подготовиться к выезду с ближайшего съезда с автомагистрали впереди на общую дорогу. Следовательно, когда выбран «режим потери положения», становится легче обнаруживать цели, устанавливая целевую полосу в крайнюю левую полосу.
[0051] Конфигурация процесса управления выбором режима положения, который выполняется контроллером 40 режима положения согласно первому варианту осуществления, будет описана ниже на основе блок-схемы последовательности операций управления выбором режима положения, показанной на Фиг.4. Это управление выбором режима положения, в принципе, выполняется повторно до тех пор, пока задействуемое транспортное средство не покинет точку отправления и не прибудет в точку назначения.
[0052] На этапе S1 определяется, имеется ли запрос на выполнение коррекции собственного местоположения. Если ДА (присутствует запрос на выполнение), процесс переходит к этапу S2. Если НЕТ (запрос на выполнение отсутствует), процесс переходит к этапу S7. Здесь наличие или отсутствие запроса на выполнение коррекции собственного местоположения определяется на основе ввода запроса на выполнение коррекции собственного местоположения или на основе флага запроса, который устанавливается на основе завершения выполнения коррекции собственного местоположения, или тому подобному. Этап S1 соответствует блоку 41 определения запроса.
[0053] На этапе S2, после определения того, что запрос на выполнение коррекции собственного местоположения присутствует на этапе S1, определяется, является ли период невозможности коррекции, в течение которого коррекция собственного местоположения не может быть выполнена, большим или равным предварительно установленному пороговому периоду. Если ДА (период невозможности коррекции ≧ порогового периода), процесс переходит к этапу S3. Если НЕТ (период невозможности коррекции < порогового периода), процесс переходит к этапу S7. Этап S2 соответствует блоку 42 определения периода невозможности коррекции.
[0054] На этапе S3, после определения того, что период невозможности коррекции ≥ порогового периода на этапе S2, определяется, может ли объект, прогнозируемый обнаруживаемым бортовым датчиком 1 на основе электронных картографических данных, действительно быть обнаружен на основе данных изображения, сфотографированных камерой 11. Если ДА (успешное обнаружение спрогнозированной цели), процесс переходит к этапу S4. Если НЕТ (неудачное обнаружение спрогнозированной цели), процесс переходит к этапу S5. Этап S3 соответствует блоку 43 прогнозирования обнаружения цели.
[0055] На этапе S4, после определения успешного обнаружения прогнозируемой цели на этапе S3, определяется, имеется ли дорожный затор в полосе движения, по которой движется задействуемое транспортное средство. Если ДА (присутствует дорожный затор), процесс переходит к этапу S8. Если НЕТ (дорожного затора нет), процесс переходит к этапу S7. Здесь процесс определения того, имеется ли дорожный затор, выполняется на основе блок-схемы последовательности операций управления определением дорожного затора, описанной дополнительно ниже. Этап S4 соответствует блоку 44 определения дорожного затора.
[0056] На этапе S5, после определения безуспешного обнаружения спрогнозированной цели на этапе S3, определяется, был ли выбран «режим большого расстояния между транспортными средствами» в качестве текущего выбранного режима положения. Если ДА (режим положения = режиму большого расстояния между транспортными средствами), процесс переходит к этапу S6. Если НЕТ (режим положения = обычному режиму или режиму потери положения), процесс переходит к этапу S8.
[0057] На этапе S6, после определения того, что режим положения = режиму большого расстояния между транспортными средствами на этапе S5, определяется, является ли оцененная погрешность положения между истинным положением задействуемого транспортного средства и положением задействуемого транспортного средства, установленным в электронных картографических данных, большей или равной предварительно установленной пороговой погрешности. Если ДА (оцененная погрешность положения ≧ пороговой погрешности), процесс переходит к этапу S9. Если НЕТ (оцененная погрешность положения < пороговой погрешности), процесс переходит к этапу S8. Этап S5 и этап S6 соответствуют блоку 45 оценки погрешности положения.
[0058] На этапе S7 после определения того, что запрос на выполнение коррекции собственного местоположения отсутствует на этапе S1, определения того, что период невозможности коррекции < порогового периода на этапе S2, или определения того, что дорожный затор отсутствует на этапе S4, "обычный режим" выбирается в качестве режима положения, и процесс переходит к ВОЗВРАТУ. Целевая полоса движения таким образом устанавливается в полосу движения задействуемого транспортного средства, и задействуемое транспортное средство продолжает движение по полосе, по которой задействуемое транспортное средство уже движется. Кроме того, целевое расстояние между транспортными средствами устанавливается в первое целевое расстояние между транспортными средствами, установленному заранее на основе относительной разницы скоростей транспортного средства с впередиидущим транспортным средством и т.п. Ситуация «нет запроса на выполнение коррекции собственного местоположения» означает, что нет необходимости выполнять коррекцию собственного местоположения. Кроме того, ситуация «период невозможности коррекции < порогового периода» означает, что время, прошедшее после того, как была выполнена коррекция собственного местоположения, короткое, и оцененная погрешность положения мала, так что нет необходимости в упреждающем изменении целевого расстояния между транспортными средствами или целевой полосы движения. Кроме того, ситуация «нет дорожного затора» означает, что расстояние между транспортными средствами между задействуемым транспортным средством и впередиидущим транспортным средством может поддерживаться надлежащим образом, и маловероятно, что впередиидущее транспортное средство помешает обнаружению цели.
[0059] На этапе S8, после определения наличия дорожного затора на этапе S4, определения того, что режим положения = обычному режиму или режиму потери положения на этапе S5, или определения того, что оцененная погрешность положения < пороговой погрешности на этапе S6, "Режим большого расстояния между транспортными средствами" выбирается в качестве режима положения, и процесс переходит к ВОЗВРАТУ. Таким образом, полоса движения, по которой в настоящее время движется задействуемое транспортное средство, сохраняется в качестве целевой полосы. Кроме того, целевое расстояние между транспортными средствами устанавливается во второе целевое расстояние между транспортными средствами, которое больше первого целевого расстояния между транспортными средствами. Ситуация «имеется дорожный затор» означает, что расстояние между транспортными средствами между задействуемым транспортным средством и предшествующим транспортным средством стало коротким, и что вероятно, что предшествующее транспортное средство будет мешать обнаружению цели. Кроме того, ситуация «режим положения = обычному режиму или режиму потери положения» и «оцененная погрешность положения < пороговой погрешности» означает, что есть место для увеличения шансов обнаружения цели за счет увеличения расстояния между транспортными средствами.
[0060] На этапе S9, после определения того, что оцененная погрешность положения ≥ пороговой погрешности на этапе S6, «режим потери положения» выбирается в качестве режима положения, и процесс переходит к ВОЗВРАТУ. Таким образом, целевая полоса устанавливается в крайнюю левую полосу движения, и при необходимости выполняется автоматическая смена полосы движения. Кроме того, целевое расстояние между транспортными средствами устанавливается в первое целевое расстояние между транспортными средствами. Ситуация «оцененная погрешность положения ≥ пороговой погрешности» означает, что оцененная погрешность положения велика и что необходима коррекция собственного местоположения, поэтому желательно упростить обнаружение цели, описанной в электронных картографических данных. Этапы S7-S9 соответствуют блоку 46 выбора режима положения.
[0061] Конфигурация процесса управления определением дорожного затора, который выполняется блоком 44 определения дорожного затора согласно первому варианту осуществления, будет описана ниже на основе блок-схемы последовательности операций управления определением дорожного затора, показанной на Фиг.5.
[0062] На этапе S11 определяется, находится ли задействуемое транспортное средство в дальности D и скорость транспортного средства меньше или равна предписанной скорости транспортного средства (например, 10 км/ч). Если ДА (скорость транспортного средства ≤ предписанной скорости транспортного средства), процесс переходит к этапу S12. Если НЕТ (скорость транспортного средства > предписанной скорости транспортного средства), процесс переходит к этапу S14. Скорость транспортного средства определяется датчиком скорости транспортного средства, установленным в задействуемом транспортном средстве. Кроме того, ситуации, в которых скорость транспортного средства меньше или равна предписанной скорости транспортного средства, включают в себя как случай, когда транспортное средство движется, так и случай, когда скорость транспортного средства становится нулевой и транспортное средство останавливается.
[0063] На S12, после определения того, что скорость транспортного средства ≤ предписанной скорости транспортного средства на этапе S11, выполняется отсчет первого таймера, который представляет собой время, прошедшее с того момента, как скорость транспортного средства стала меньше или равной предписанной скорости транспортного средства, и процесс переходит к этапу S13.
[0064] На этапе S13, после подсчета первым таймером на этапе S12, определяется, больше или равен подсчет первого таймера предварительно установленному первому времени определения дорожного затора. Если ДА (первый таймер ≥ первого времени определения дорожного затора), определяется, что состояние, в котором скорость задействуемого транспортного средства стала предписанной скоростью транспортного средства или меньше, продолжалось в течение первого времени определения дорожного затора или более, и процесс переходит к этапу S18. Если НЕТ (первый таймер < первого времени определения дорожного затора), то определяется, что состояние, в котором скорость задействуемого транспортного средства стала предписанной скоростью транспортного средства или меньше, не продолжалось в течение первого времени определения дорожного затора или более, и процесс возвращается к этапу S11.
[0065] На этапе S14, после определения того, что скорость транспортного средства > предписанной скорости транспортного средства на этапе S11, определяется, загорожена ли предписанная дальность или более из сфотографированного изображения (дальность обнаружения) камеры 11 бортового датчика 1 впередиидущим транспортным средством, движущимся непосредственно впереди задействуемого транспортного средства. Если ДА (предписанная дальность или более загорожена), процесс переходит к этапу S18. Если НЕТ (предписанная дальность или более не загорожена), процесс переходит к этапу S15. Здесь определение того, загорожена ли предписанная дальность или более из сфотографированного изображения камеры 11 впередиидущим транспортным средством, на основе соотношения области изображения впередиидущего транспортного средства к области сфотографированного изображения. То есть, если область изображения впередиидущего транспортного средства, занимающая область сфотографированного изображения, больше или равна предписанному соотношению, то определяется, что «предписанная дальность или более из сфотографированного изображения загорожена впередиидущим транспортным средством, «и если область изображения впередиидущего транспортного средства, занимающая область сфотографированного изображения, меньше, чем предписанное соотношение, определяется, что «предписанная дальность или более из сфотографированного изображения не загорожена впередиидущим транспортным средством».
[0066] На этапе S15, после определения того, что предписанная дальность или более сфотографированного изображения (дальность обнаружения) камеры 11 не загорожена впередиидущим транспортным средством на этапе S14, определяется, является ли фактическое расстояние между транспортными средствами от задействуемого транспортного средства до впередиидущего транспортного средства, движущегося непосредственно перед задействуемым транспортным средством, меньшим или равным предписанному расстоянию. Если ДА (расстояние между транспортными средствами ≤ предписанного расстояния), процесс переходит к этапу S16. Если НЕТ (расстояние между транспортными средствами > предписанного расстояния), процесс переходит к этапу S19. Здесь расстояние между транспортными средствами определяется радаром 12.
[0067] На этапе S16, после определения того, что расстояние между транспортными средствами ≤ предписанного расстояния на этапе S15, второй таймер, который представляет собой время, прошедшее с момента, когда расстояние между транспортными средствами перед задействуемым транспортным средством стало меньше или равно предписанному расстоянию, и процесс переходит к этапу S17.
[0068] На этапе S17, после подсчета вторым таймером на этапе S16, определяется, является ли счет второго таймера большим или равным предварительно установленному второму времени определения дорожного затора. Если ДА (второй таймер ≥ второго времени определения дорожного затора), определяется, что состояние, в котором расстояние между транспортными средствами от задействуемого транспортного средства до впередиидущего транспортного средства стало предписанным расстоянием или меньше, продолжалось в течение второго времени определения дорожного затора или более, и процесс переходит к этапу S18. Если НЕТ (второй таймер < второго времени определения дорожного затора), определяется, что состояние, в котором расстояние между транспортными средствами от задействуемого транспортного средства до впередиидущего транспортного средства стало предписанным расстоянием или меньше, не продолжалось в течение второго времени определения дорожного затора или более, и процесс возвращается к этапу S15.
[0069] На этапе S18, после определения того, что первый таймер ≥ первого времени определения дорожного затора на этапе S13, определение того, что предписанная дальность или более из сфотографированного изображения (дальность обнаружения) камеры 11 загорожена впередиидущим транспортным средством на этапе S14, или при определении того, что второй таймер ≥ второго времени определения дорожного затора на этапе S17, определяется, что на полосе движения, по которой движется задействуемое транспортное средство, имеется дорожный затор, и процесс переходит к КОНЦУ. Таким образом, блок 44 определения дорожного затора выводит информацию о дорожном заторе, указывающую, что имеется дорожный затор.
[0070] На этапе S19, после определения того, что расстояние между транспортными средствами ≥ предписанного расстояния на этапе S15, определяется, что на полосе движения, по которой движется задействуемое транспортное средство, нет дорожного затора, и процесс переходит к КОНЦУ. Таким образом, блок 44 определения дорожного затора выводит информацию о дорожном заторе, указывающую, что дорожного затора нет.
[0071] Изменения в дальности обнаружения цели из-за различий в расстоянии между транспортными средствами от задействуемого транспортного средства до впередиидущего транспортного средства и связанные с ними проблемы будут описаны ниже на основе рисунков 6A-6E. Здесь целью должен быть дорожный знак 103, установленный на левом конце дороги, а бортовым датчиком 1 должна быть камера 11 (передняя камера распознавания), которая установлена в передней части задействуемого транспортного средства 101 и которая фотографирует в направлении впереди задействуемого транспортного средства. Кроме того, на чертежах дальность 111, которая может быть сфотографирована камерой 11, обозначена крупными диагональными линиями, а дальность фотографирования (дальность, в которой может быть сфотографирован дорожный знак 103) 112, которая не загорожена движущимся впереди транспортным средством 102, обозначена мелкими диагональными линиями.
[0072] Если впередиидущее транспортное средство 102 является обычным легковым автомобилем, небольшим легковым автомобилем, легким транспортным средством и т.п., имеющим относительно небольшую высоту транспортного средства, как показано на Фигуре 6A, даже если выполняется движение следования с целевым расстоянием между транспортными средствами, установленным в первое целевое расстояние L1 между транспортными средствами, соотношение сфотографированного изображения (дальность обнаружения) камеры 11, загороженного впередиидущим транспортным средством 102, является низким. Следовательно, можно обеспечить дальность 112 фотографирования, которая не загорожена впередиидущим транспортным средством 102, и, таким образом, сфотографировать целевой дорожный знак 103 посредством использования камеры 11 и обнаружить его на основе данных изображения. В результате появляется возможность выполнить коррекцию собственного местоположения.
[0073] С другой стороны, если впередиидущее транспортное средство 102 является большим транспортным средством, таким как грузовик или автобус, имеющим относительно большую высоту транспортного средства, как показано на Фиг.6B, если выполняется движение следования с целевым расстоянием между транспортными средствами, установленным в первое целевое расстояние L1 между транспортными средствами, то соотношение сфотографированного изображения (дальность обнаружения) камеры 11, загороженного впередиидущим транспортным средством 102, является высоким. Следовательно, трудно в достаточной степени обеспечить дальность 112 фотографирования, которая не загорожена впередиидущим транспортным средством 102, и целевой дорожный знак 103 не может быть надлежащим образом сфотографирован камерой 11. Кроме того, как показано на Фиг.6C и 6D, даже если задействуемое транспортное средство 101 и впередиидущее транспортное средство 102 движутся и приближаются к дорожному знаку 103, дорожный знак 103 входит только в часть дальности 112 фотографирования, которая не загорожена впередиидущим транспортным средством 102. Следовательно, становится чрезвычайно трудно обнаружить дорожный знак 103 на основе данных изображения, сфотографированных камерой 11. Следовательно, существует риск, что вероятность коррекции собственного местоположения будет снижена.
[0074] Напротив, давайте рассмотрим случай, в котором, даже если впередиидущее транспортное средство 102 является большим транспортным средством, имеющим относительно большую высоту транспортного средства, как показано на Фигуре 6E, движение следования выполняется с целевым расстоянием между транспортными средствами, установленным во второе целевое расстояние L2 между транспортными средствами, которое больше первого целевого расстояния L1 между транспортными средствами (например, в 1,5 раза больше первого целевого расстояния L1 между транспортными средствами). В это время, поскольку задействуемое транспортное средство 101 отделено от впередиидущего транспортного средства 102, то угол (угол обзора), создаваемый двумя линиями, проведенными от обоих концов впередиидущего транспортного средства 102 к центру камеры 11, становится небольшим. В результате соотношение сфотографированного изображения (дальность обнаружения) камеры 11, которое загорожено впередиидущим транспортным средством 102, становится малым. Таким образом, даже если впередиидущее транспортное средство 102 является большим транспортным средством, можно обеспечить дальность 112 фотографирования, которая не загорожена впередиидущим транспортным средством 102, увеличив расстояние между ними, и, таким образом, сфотографировать целевой дорожный знак 103 посредством использования камеры 11, и обнаружить этот дорожный знак 103 на основе данных изображения. В результате появляется возможность выполнить коррекцию собственного местоположения.
[0075] Действие по увеличению вероятности обнаружения цели в способе содействия вождению и в устройстве содействия вождению согласно первому варианту осуществления в сценарии, в котором имеется дорожный затор на полосе движения, по которой движется задействуемое транспортное средство, будет описано ниже на основе Фигуры 7.
[0076] То есть, когда задействуемое транспортное средство 101, движущееся посредством автоматического вождения, следует за впередиидущим транспортным средством 102 на расстоянии между транспортными средствами, установленным в первое целевое расстояние L1 между транспортными средствами, если запрос на выполнение коррекции собственного местоположения вводится в момент времени t1, то на этапе S1, показанном на Фиг.4, делается положительное определение, и процесс переходит к этапу S2. Здесь, если время, прошедшее с момента завершения предыдущего выполнения коррекции собственного местоположения, больше или равно пороговому периоду, определение этапа S2 является утвердительным, и процесс переходит к этапу S3.
[0077] Затем, во время выполнения коррекции собственного местоположения, определяется, может ли цель, например, дорожный знак, который, согласно прогнозам, можно сфотографировать с задействуемого транспортного средства 101 на основе электронных картографических данных, действительно быть обнаружена, на основе данные изображения, сфотографированных камерой 11. Если обнаружение цели успешно, то на этапе S3 делается положительное определение, процесс переходит к этапу S4, и определяется, имеется ли дорожный затор на полосе 104 движения задействуемого транспортного средства, которая является полосой, по которой движется задействуемое транспортное средство 101.
[0078] Здесь, если состояние, в котором скорость задействуемого транспортного средства 101 стала предписанной скоростью транспортного средства или меньше, продолжалось в течение предварительно установленного первого времени определения дорожного затора или более, процесс переходит с этапа S11 на этап S12, этап S13 и этап S18 в порядке на блок-схеме последовательности операций, показанной на Фиг.5, и определяется, что полоса 104 движения задействуемого транспортного средства имеет затор. В результате на этапе S4 делается положительное определение, процесс переходит к этапу S8, и в качестве режима положения выбирается «режим большого расстояния между транспортными средствами». То есть целевая полоса устанавливается в полосу движения, по которой движется задействуемое транспортное средство 101 (полоса 104 задействуемого транспортного средства), а целевое расстояние между транспортными средствами устанавливается во второе целевое расстояние L2 между транспортными средствами, которое больше первого целевого расстояния L1 между транспортными средствами.
[0079] Во время движения следования с целевым расстоянием между транспортными средствами, установленным в первое целевое расстояние L1 между транспортными средствами, даже если скорость транспортного средства высока, если предписанная дальность или более из сфотографированного изображения (дальность обнаружения) камеры 11 загорожена впередиидущим транспортным средством 102, процесс переходит от этапа S11 к этапу S14 и этапу S18 в порядке, который показан на блок-схеме последовательности операций, показанной на Фиг.5, и определяется, что полоса движения 104 задействуемого транспортного средства имеет затор. Затем в качестве режима положения выбирается «режим большого расстояния между транспортными средствами», и целевое расстояние между транспортными средствами устанавливается во второе целевое расстояние L2 между транспортными средствами.
[0080] Кроме того, во время следующего движения с целевым расстоянием между транспортными средствами, установленным в первое целевое расстояние L1 между транспортными средствами, если фактическое расстояние между транспортными средствами становится меньше или равным предписанному расстоянию, и это состояние продолжается в течение второго целевого расстояния L2 между транспортными средствами или более, процесс переходит от этапа S11 к этапу S14, этапу S15, этапу S16, этапу S17 и этапу S18 в порядке, который указан на блок-схеме последовательности операций, показанной на Фигуре 5, и определяется, что полоса движения 104 задействуемого транспортного средства имеет затор. Затем "режим большого расстояния между транспортными средствами" выбирается в качестве режима положения, и целевое расстояние между транспортными средствами устанавливается во второе целевое расстояние L2 между транспортными средствами.
[0081] Кроме того, во время выполнения коррекции собственного местоположения, если цель, такая как дорожный знак, не может быть обнаружена на основе данных изображения, сфотографированных камерой 11 бортового датчика 1, отрицательное определение выполняется на этапе S3, и процесс переходит к этапу S5. Затем определяется, был ли уже выбран «режим большого расстояния между транспортными средствами» в качестве режима положения.
[0082] В сценарии, показанном на Фиг.7, поскольку «обычный режим», в котором целевое расстояние между транспортными средствами установлено в первое целевое расстояние L1 между транспортными средствами, выбирается в момент времени t1, то на этапе S5 выполняется отрицательное определение, процесс переходит к этапу S8, и в качестве режима положения выбирается «режим большого расстояния между транспортными средствами». Затем целевое расстояние между транспортными средствами устанавливается во второе целевое расстояние L2 между транспортными средствами, которое больше первого целевого расстояния L1 между транспортными средствами, в то время как полоса движения 104 задействуемого транспортного средства поддерживается в качестве целевой полосы движения.
[0083] С другой стороны, когда на этапе S3 делается отрицательное определение и процесс переходит к этапу S5, если «режим большого расстояния между транспортными средствами» уже был выбран в качестве режима положения, процесс переходит с этапа S5 к этапу S6. Затем определяется, является ли оцененная погрешность положения между истинным положением задействуемого транспортного средства и положением задействуемого транспортного средства, установленным в электронных картографических данных, большей или равной предварительно установленной пороговой погрешности. Если оцененная погрешность положения мала и меньше пороговой погрешности, то на этапе S6 выполняется отрицательное определение, процесс переходит к этапу S8, и в качестве режима положения выбирается «режим большого расстояния между транспортными средствами». В этом случае, поскольку «режим большого расстояния между транспортными средствами» уже выбран в качестве режима положения, «режим большого расстояния между транспортными средствами» поддерживается в качестве режима положения. Другими словами, целевое расстояние между транспортными средствами поддерживается на втором целевом расстоянии L2 между транспортными средствами, которое больше первого целевого расстояния L1 между транспортными средствами, в то время как полоса движения 104 задействуемого транспортного средства поддерживается в качестве целевой полосы движения.
[0084] Затем, когда целевое расстояние между транспортными средствами установлено во второе целевое расстояние L2 между транспортными средствами, фактическое расстояние между транспортными средствами увеличивается посредством выполнения управления замедлением, задерживая время начала, чтобы оно было позже, чем время начала впередиидущего транспортного средства 102, останавливая до момента остановки впередиидущего транспортного средства 102, или тому подобное. Таким образом, расстояние между транспортными средствами от задействуемого транспортного средства 101 до впередиидущего транспортного средства 102 совпадает со вторым целевым расстоянием L2 между транспортными средствами в момент времени t2. Затем, как показано на Фиг.6E, даже если впередиидущее транспортное средство 102 является большим транспортным средством, можно обеспечить дальность 112 фотографирования, которая не загорожена впередиидущим транспортным средством 102, посредством увеличения расстояния между транспортными средствами и, таким образом, увеличить вероятность обнаружения объекта. В результате можно снизить вероятность упущения возможности коррекции собственного местоположения.
[0085] Напротив, когда задействуемое транспортное средство 101, перемещаясь посредством автоматического вождения, следует за впередиидущим транспортным средством 102 на расстоянии между транспортными средствами, установленным в первое целевое расстояние L1 между транспортными средствами, если нет запроса на выполнение коррекции собственного местоположения, на этапе S1 делается отрицательное определение, и процесс переходит к этапу S7. То есть «обычный режим» выбирается в качестве режима положения, и целевое расстояние между транспортными средствами устанавливается в первое целевое расстояние L1 между транспортными средствами, которое определяется на основе предписанного условия, такого как скорость транспортного средства, в то время как полоса 104 движения задействуемого транспортного средства сохраняется в качестве целевой полосы движения.
[0086] Кроме того, даже если период невозможности коррекции меньше порогового периода, или если определено, что на полосе 104 движения задействуемого транспортного средства нет дорожного затора, в любом случае, на этапе S2 делается отрицательное определение, и процесс переходит к этапу S7, или на этапе S4 делается отрицательное определение, и процесс переходит к этапу S7. Затем в качестве режима положения выбирается «обычный режим», и целевое расстояние между транспортными средствами устанавливается в первое целевое расстояние L1 между транспортными средствами, которое определяется на основе предписанного условия, такого как скорость транспортного средства, в то время как полоса движения 104 задействуемого транспортного средства сохраняется в качестве целевой полосы движения.
[0087] В результате, в сценарии, в котором выполнение коррекции собственного местоположения не требуется, или в сценарии, в котором мало опасений, что расстояние между транспортными средствами уменьшится, можно предотвратить установку расстояния между транспортными средствами неоправданно большим и двигаться на соответствующем расстоянии между транспортными средствами.
[0088] Кроме того, в первом варианте осуществления, при условии, что период невозможности коррекции продолжался в течение предварительно установленного порогового периода или дольше, в качестве режима положения выбирается «режим большого расстояния между транспортными средствами». То есть, когда коррекция собственного местоположения выполняется в подходящий момент времени, можно предотвратить выбор «режима большого расстояния между транспортными средствами» в качестве режима положения. Следовательно, можно предотвратить установку излишне большого целевого расстояния между транспортными средствами и сдержать уменьшение вероятности коррекции при сокращении изменений расстояния между транспортными средствами.
[0089] Кроме того, в первом варианте осуществления, когда имеется дорожный затор на полосе 104 движения задействуемого транспортного средства, по которой двигается задействуемое транспортное средство 101, «режим большого расстояния между транспортными средствами» выбирается в качестве режима положения, даже если цель (дорожный знак 103 и т. д.) может быть обнаружена на основе данных изображения камеры 11. В результате можно установить целевое расстояние между транспортными средствами в относительно длинное второе целевое расстояние между транспортными средствами, когда расстояние между транспортными средствами становится коротким из-за дорожного затора и существует высокая вероятность упустить шанс выполнить коррекцию собственного местоположения. Таким образом, можно снизить вероятность упущения возможности коррекции.
[0090] Затем, в первом варианте осуществления, определение того, что имеется дорожный затор на полосе 104 движения задействуемого транспортного средства, выполняется, когда состояние, в котором скорость задействуемого транспортного средства 101 стала предписанной скоростью транспортного средства или меньше, продолжалось в течение первого времени определения дорожного затора или более. Следовательно, становится возможным легко определить наличие дорожного затора и установить целевое расстояние между транспортными средствами во второе целевое расстояние L2 между транспортными средствами в надлежащий момент времени. Затем можно создать подходящую ситуацию, в которой становится возможным выполнение коррекции собственного местоположения.
[0091] Кроме того, если определено, что на полосе 104 движения задействуемого транспортного средства имеется дорожный затор из-за того, что по меньшей мере предписанная дальность из сфотографированной дальности (дальность обнаружения) 110 камеры 11 загорожена впередиидущим транспортным средством 102, можно установить целевое расстояние между транспортными средствами во второе целевое расстояние L2 между транспортными средствами, с распознаванием ситуации, в которой трудно обнаружить цель (дорожный знак 103 и т.д.) на основе данных изображения камеры 11. Следовательно, можно надежно создать ситуацию, в которой выполнение коррекции собственного местоположения становится возможным, когда требуется выполнение коррекции собственного местоположения.
[0092] Кроме того, если определено, что имеется дорожный затор на полосе 104 движения задействуемого транспортного средства на основании того факта, что ситуация, в которой фактическое расстояние между транспортными средствами от задействуемого транспортного средства 101 до впередиидущего транспортного средства 102 стало предписанным расстоянием или меньше, продолжалась в течение второго времени определения дорожного затора или более, становится возможным легко определить, что существует дорожный затор. Затем можно установить целевое расстояние между транспортными средствами во второе целевое расстояние L2 между транспортными средствами в соответствующий момент времени и соответствующим образом создать ситуацию, в которой становится возможным выполнение коррекции собственного местоположения.
[0093] Действие по увеличению вероятности обнаружения цели в способе содействия вождению и в устройстве содействия вождению согласно первому варианту осуществления в сценарии, в котором оцененная погрешность положения превышает пороговую погрешность, будет описано ниже на основе Фиг.8.
[0094] То есть, если имеется запрос на выполнение коррекции собственного местоположения, и период невозможности коррекции больше или равен пороговому периоду, и объект (дорожный знак 103 на Фиг.8), хранящийся в электронных картографических данных, не может быть обнаружен, процесс переходит от этапа S1 к этапу S2, этапу S3 и этапу S5 в этом порядке, и определяется, выбран ли «режим большого расстояния между транспортными средствами» в качестве режима положения. Здесь, если «режим большого расстояния между транспортными средствами» уже был выбран в качестве режима положения, и целевое расстояние между транспортными средствами было установлено во второе целевое расстояние L2 между транспортными средствами, то процесс переходит к этапу S6, и определяется, является ли оцененная погрешность положения между истинным положением задействуемого транспортного средства и положением задействуемого транспортного средства, установленным в электронных картографических данных, большей или равной предварительно установленной пороговой погрешности.
[0095] То есть, как показано на Фиг.8, рассматривается случай, в котором положением задействуемого транспортного средства, установленным в электронных картографических данных, является положение 101а. В это время предположим, что оцененная погрешность положения составляет ±0,2 м в направлении ширины транспортного средства и ±5,0 м в продольном направлении транспортного средства, что пороговая погрешность составляет 5,0 м и что дальность фотографирования камеры 11 составляет 5-50 м от задействуемого транспортного средства 101. Поскольку направление вдоль ширины транспортного средства может быть скорректировано на основе белых линий дороги, будет учитываться только погрешность в продольном направлении транспортного средства. Если оцененная погрешность положения максимальна, то дальность в 1-55 м от дорожного знака 103 становится дальностью, которую можно было бы спрогнозировать при фотографировании посредством использования камеры 11. Если задействуемое транспортное средство 101 присутствует в пределах дальности оцененной погрешности положения, считается, что дорожный знак 103 может быть обнаружен по меньшей мере один раз, пока задействуемое транспортное средство 101 движется в пределах этого дальности оцененной погрешности положения (дальности, обведенной пунктирной линией 105 на Фиг.8).
[0096] С другой стороны, когда предполагается, что задействуемое транспортное средство 101 движется в пределах этой дальности оцененной погрешности положения, и дорожный знак 103 не может быть обнаружен даже один раз, можно подумать, что дальность 106 фотографирования загорожена впередиидущим транспортным средством, или что истинное положение задействуемого транспортного средства находится в положении 101b и что возникает оцененная погрешность положения, которая больше или равна пороговой погрешности. Следовательно, определяется, является ли оцененная погрешность положения большей или равной пороговой погрешности, на основе сфотографированного изображения с камеры 11 и оцененного положения задействуемого транспортного средства 101.
[0097] Затем, если оцененная погрешность положения (оцененная на основе периода невозможности коррекции) больше или равна пороговой погрешности, на этапе S6 выполняется утвердительное определение, и процесс переходит к этапу S9. Затем в качестве режима положения выбирается «режим потери положения». В результате целевая полоса устанавливается как самая дальняя слева (крайняя левая полоса 107 движения) на дороге, по которой движется задействуемое транспортное средство, а целевое расстояние между транспортными средствами устанавливается в первое целевое расстояние L1 между транспортными средствами. Следовательно, выполняя автоматическую смену полосы движения на крайнюю левую полосу 107 движения, которая является целевой полосой, задействуемое транспортное средство 101 перемещается на полосу, с которой становится легче обнаружить дорожный знак 103, который является целью, описанной в электронных картографических данных. Таким образом, даже если оцененная погрешность положения велика, можно снизить риск уменьшения вероятности коррекции собственного местоположения.
[0098] В первом варианте осуществления был представлен пример, в котором, когда «режим потери положения» выбран в качестве режима положения, целевая полоса движения устанавливается в крайнюю левую полосу 107 движения, и положение, в котором движется задействуемое транспортное средство 101, меняется на крайнюю левую полосу 107 движения посредством автоматической смены полосы движения. Однако, например, может быть такая конфигурация, что режим автоматического вождения отменяется, и режим переключается в режим ручного вождения, в котором водитель управляет самостоятельно. Кроме того, если определено, что смена полосы движения на эту крайнюю левую полосу 107 движения фактически невозможна, даже если целевая полоса движения установлена в крайнюю левую полосу 107 движения, целевая полоса движения устанавливается в крайнюю правую полосу 108 движения, и может выполняться автоматическая смена полосы движения в крайнюю правую полосу 108 движения. Даже в этом случае можно двигаться по полосе движения, с которой можно относительно легко обнаружить цель в конце дороги, и снизить риск снижения вероятности коррекции собственного местоположения.
[0099] Эффекты описаны ниже. Следующие эффекты достигаются посредством использования способа содействия вождению и устройства содействия вождению согласно первому варианту осуществления.
[0100] Способ содействия вождению с использованием контроллера (контроллера 40 режима положения), который устанавливает целевое расстояние между транспортными средствами от задействуемого транспортного средства 101 до впередиидущего транспортного средства 102, движущегося непосредственно перед задействуемым транспортным средством 101, выполнен с возможностью определения, имеется ли запрос на выполнение коррекции положения задействуемого транспортного средства, установленного в картографических данных (электронных картографических данных), на основе результата сравнения информации о положении в отношении цели (дорожный знак 103), описанной в картографических данных (электронных картографических данных), с информацией о положении в отношении цели (дорожный знак 103), полученной посредством использования камеры 11 бортового датчика 1, установленного в задействуемом транспортном средстве 101 (этап S1), установки целевого расстояния между транспортными средствами в предварительно установленное первое целевое расстояние L1 между транспортными средствами, если запрос на выполнение не был сделан (этап S7), и установки целевого расстояния между транспортными средствами во второе целевое расстояние L2 между транспортными средствами, которое больше первого целевого расстояния L1 между транспортными средствами, если был сделан запрос на выполнение (этап S8).
[0101] В результате можно снизить вероятность упущения возможности скорректировать положение задействуемого транспортного средства, установленное в электронных картографических данных.
[0102] Кроме того, после определения того, что запрос на выполнение был сделан (этап S1), определяется, продолжался ли период невозможности коррекции, в течение которого коррекция собственного местоположения не может быть выполнена, в течение предварительно установленного порогового периода или более (этап S2), и если период невозможности коррекции продолжался в течение порогового периода или более, то целевое расстояние между транспортными средствами устанавливается во второе целевое расстояние между транспортными средствами (этап S8).
[0103] В результате можно предотвратить установку излишне большого целевого расстояния между транспортными средствами и подавить снижение вероятности коррекции при подавлении изменений расстояния между транспортными средствами.
[0104] Кроме того, после определения того, что запрос на выполнение был сделан (этап S1), определяется, имеется ли дорожный затор на полосе движения (полоса 104 задействуемого транспортного средства), по которой движется задействуемое транспортное средство 101 (этап S4), и если определено, что имеется дорожный затор, целевое расстояние между транспортными средствами устанавливается во второе целевое расстояние между транспортными средствами (этап S8).
[0105] В результате можно установить целевое расстояние между транспортными средствами в относительно длинное второе целевое расстояние между транспортными средствами, когда расстояние между транспортными средствами становится коротким из-за дорожного затора и существует высокая вероятность упустить шанс, чтобы сделать коррекцию собственного местоположения, чтобы тем самым снизить вероятность упущения возможности внести коррекцию.
[0106] Затем определение того, что возник дорожный затор, выполняется, когда состояние, в котором скорость задействуемого транспортного средства 101 стала предписанной скоростью транспортного средства или меньше, продолжалось в течение предписанного периода времени (первого времени определения дорожного затора) или более (этапы с S11 по S13 и этап S18).
[0107] Таким образом, можно легко определить, что существует дорожный затор, и соответствующим образом создать ситуацию, в которой становится возможным выполнение коррекции собственного местоположения.
[0108] Кроме того, камера 11 бортового датчика 1 имеет дальность обнаружения (дальность фотографирования), из которой может быть получена информация, относящаяся к цели (дорожный знак 103), и осуществляется определение, что имеется дорожный затор, когда определено, что, по меньшей мере, предписанная дальность дальности обнаружения (дальности фотографирования) загорожена впередиидущим транспортным средством 102 (этапы S14 и S18).
[0109] Таким образом, можно создать подходящую ситуацию, в которой становится возможным выполнение коррекции собственного местоположения, одновременно распознавая ситуацию, которая затрудняет обнаружение цели (дорожный знак 103 и т.д.).
[0110] Кроме того, определение того, что имеется дорожный затор выполняется, когда состояние, в котором фактическое расстояние между транспортными средствами от задействуемого транспортного средства 101 до впередиидущего транспортного средства 102 стало предписанным расстоянием или меньше, продолжалось в течение, по меньшей мере, предписанного предварительно установленного периода времени (второго времени определения дорожного затора) (этапы с S15 по S18).
[0111] Таким образом, можно легко определить, что существует дорожный затор, и соответствующим образом создать ситуацию, в которой становится возможным выполнение коррекции собственного местоположения.
[0112] Кроме того, в устройстве содействия вождению, содержащем контроллер (контроллер 40 режима положения), который устанавливает целевое расстояние между транспортными средствами от задействуемого транспортного средства 101 до впередиидущего транспортного средства 102, движущегося непосредственно перед задействуемым транспортным средством 101, контроллер (контроллер 40 режима положения) включает в себя блок 41 определения запроса для определения, имеется ли запрос на выполнение коррекции положения задействуемого транспортного средства, установленного в картографических данных (электронных картографических данных), на основе результата сравнения информации касаемо информации о положении цели (дорожный знак 103), описанной в картографических данных (электронных картографических данных), с информацией о положении касаемо цели (дорожный знак 103), полученной посредством использования камеры 11 бортового датчика 1, установленного в задействуемом транспортном средстве 101, и блок установки расстояния между транспортными средствами (блок 46 выбора режима положения), который устанавливает целевое расстояние между транспортными средствами в предварительно установленное первое целевое расстояние L1 между транспортными средствами, когда результат определения (информация об определении запроса), что запрос на выполнение не был сделан, вводится из блока 41 определения запроса, и устанавливает целевое расстояние между транспортными средствами во второе целевое расстояние L2 между транспортными средствами, которое больше первого целевого расстояния L1 между транспортными средствами, когда был сделан запрос на выполнение.
[0113] В результате можно снизить вероятность упущения возможности скорректировать положение задействуемого транспортного средства, установленное в электронных картографических данных.
[0114] Способ содействия вождению и устройство содействия вождению согласно настоящему раскрытию были описаны выше на основе первого варианта осуществления, но их конкретные конфигурации не ограничиваются этим первым вариантом осуществления, и различные модификации и дополнения к исполнению могут быть сделаны без отклонения от объема изобретения согласно каждому пункту формулы изобретения.
[0115] В первом варианте осуществления был представлен пример, в котором способ содействия вождению и устройство содействия вождению согласно настоящему раскрытию применяются к сценарию, в котором устанавливается целевое расстояние между транспортными средствами, когда за впередиидущим транспортным средством 102 осуществляется следование во время движения в режиме автоматического движения. Однако изобретение этим не ограничивается. Например, способ содействия вождению и устройство содействия вождению согласно настоящему раскрытию также могут применяться к транспортному средству с содействием вождению, которое выдает предупреждение через устройство 6 HMI, когда транспортное средство находится слишком близко к впередиидущему транспортному средству 102 во время движения в ручном режиме движения, в котором сам водитель управляет задействуемым транспортным средством 101. То есть даже в ручном режиме движения целевое расстояние между транспортными средствами, служащее стандартом для выдачи предупреждения, устанавливается во второе целевое расстояние L2 между транспортными средствами, если имеется запрос на выполнение коррекции собственного местоположения. Таким образом, можно предотвратить сокращение расстояния между транспортными средствами от задействуемого транспортного средства 101 до впередиидущего транспортного средства 102. Затем, поскольку можно предотвратить сокращение расстояния между транспортными средствами, становится легче обнаруживать цель посредством использования камеры 11, и можно снизить вероятность упущения возможности выполнить коррекцию собственного местоположения.
[0116] Кроме того, в первом варианте осуществления был представлен пример, в котором, если определено, что выполнение коррекции собственного местоположения было завершено, или если определено, что выполнение коррекции собственного местоположения не будет быть завершено в течение предписанного периода времени с момента вывода запроса на выполнение коррекции собственного местоположения, флаг запроса устанавливается в «ноль». Затем выводится информация определения запроса, что запрос на выполнение коррекции собственного местоположения отсутствует, и в качестве режима положения выбирается «обычный режим». То есть, в первом варианте осуществления, когда «режим большого расстояния между транспортными средствами» выбран в качестве режима положения, и целевое расстояние между транспортными средствами установлено во второе целевое расстояние L2 между транспортными средствами, если выполнение коррекции собственного местоположения не завершается в течение предписанного периода времени, временно выбирается «обычный режим», и целевое расстояние между транспортными средствами устанавливается в первое целевое расстояние L1 между транспортными средствами. Таким образом, можно предотвратить ненужное продолжение состояния, в котором целевое расстояние между транспортными средствами велико (состояние, в котором установлено второе целевое расстояние L2 между транспортными средствами).
[0117] Однако изобретение этим не ограничивается. Например, флаг запроса может быть постоянно установлен в «1», «режим большого расстояния между транспортными средствами» может быть выбран в качестве режима положения, и целевое расстояние между транспортными средствами может продолжаться устанавливаться во второе целевое расстояние L2 между транспортными средствами до тех пор, пока не будет завершена коррекция собственного местоположения. Таким образом, можно подавить колебания при смене целевой полосы движения. Кроме того, независимо от продолжительности времени, в течение которого коррекция собственного местоположения не может быть выполнена, когда пройденное расстояние после прохождения цели, такой как дорожный знак, описанной в электронных картографических данных, достигает предписанного расстояния, флаг запроса может быть установлен в «ноль», и «обычный режим» может быть выбран в качестве режима положения.
[0118] Кроме того, в первом варианте осуществления был представлен пример, в котором процесс управления определением дорожного затора, показанного на Фиг.5, выполняется для определения того, имеется ли дорожный затор на полосе движения транспортного средства, но изобретение этим не ограничивается. Например, наличие или отсутствие дорожного затора может быть определено на основе информации о дорожном заторе, полученной посредством связи с внешним устройством 3 обмена данными.
[0119] Кроме того, в первом варианте осуществления был представлен пример, в котором камера 11 (передняя камера распознавания) используется в качестве бортового датчика 1, который установлен в задействуемом транспортном средстве 101 и используется для обнаружения целей, но изобретение не ограничивается этим. Например, коррекция собственного местоположения может выполняться на основе информации о положении цели, обнаруженной посредством использования радара 12.
[0120] Кроме того, в первом варианте осуществления был представлен пример, в котором коррекция собственного местоположения выполняется на основе результата сравнения информации о положении цели, описанной в картографических данных, с информацией о положении цели, полученной камерой 11, но изобретение этим не ограничивается. Например, коррекция собственного местоположения может быть выполнена на основе результата сравнения информации о форме цели (дорожная разметка, белые линии дороги и т.д.), описанной в картографических данных, с информацией о форме цели (дорожная разметка, белая дорожные линии и т. д.), полученной камерой 11.
Реферат
Изобретение относится к способу содействия вождению. Способ содействия вождению с использованием контроллера содержит этапы, на которых определяют, имеется ли запрос на выполнение коррекции положения задействуемого транспортного средства, на основе результата сравнения информации о цели с информацией о цели, полученной посредством использования бортового датчика, установленного в задействуемом транспортном средстве. Также устанавливают целевое расстояние между транспортными средствами в предварительно установленное первое целевое расстояние между транспортными средствами после определения того, что запрос на выполнение не был сделан. Способ также содержит этапы, на которых определяют, что запрос на выполнение был сделан, продолжался ли период невозможности коррекции, в течение которого коррекция не может быть выполнена, в течение предварительно установленного порогового периода, и после определения того, что период невозможности коррекции продолжался в течение упомянутого порогового периода, устанавливают расстояние между транспортными средствами во второе целевое расстояние между транспортными средствами, после определения того, что запрос на выполнение был сделан. Достигается повышение безопасности водителя транспортного средства. 4 н. и 3 з.п. ф-лы, 12 ил.

Формула
Документы, цитированные в отчёте о поиске
Устройство управления движением и способ управления движением
Комментарии