Компьютер и способ определения расположения пользователя транспортного средства - RU2714360C2
Код документа: RU2714360C2
Чертежи


Описание
УРОВЕНЬ ТЕХНИКИ
Существующие системы и способы для определения, где пользователь расположен в пределах транспортного средства, имеют различные недостатки. Например, системы машинного зрения, такие как системы распознавания лиц, являются дорогостоящими и типично требуют специализированных камер. Системы, определяющие расположение пользователя на основании расположения мобильных телефонов, являются неточными и ненадежными, так как расположение пользователя и расположение устройства могут быть разными, например, пользователь может размещать мобильный телефон пользователя на другом сиденье. Кроме того, после определения расположения пользователя, пользователь может изменять положение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
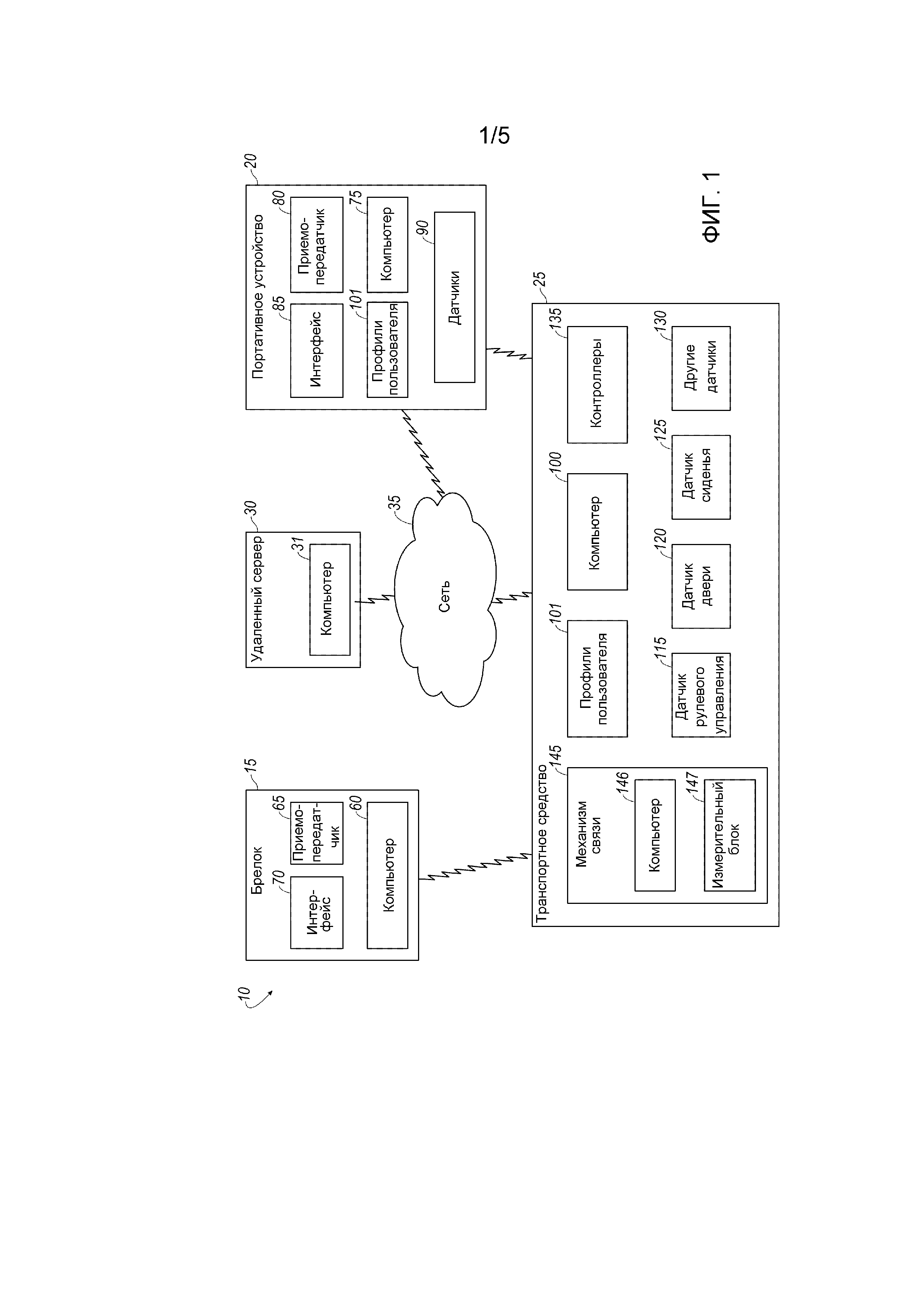
Фиг. 1 - структурная схема примерной системы для определения расположения(ий) одного или более пользователей транспортного средства с использованием носимого портативного устройства.
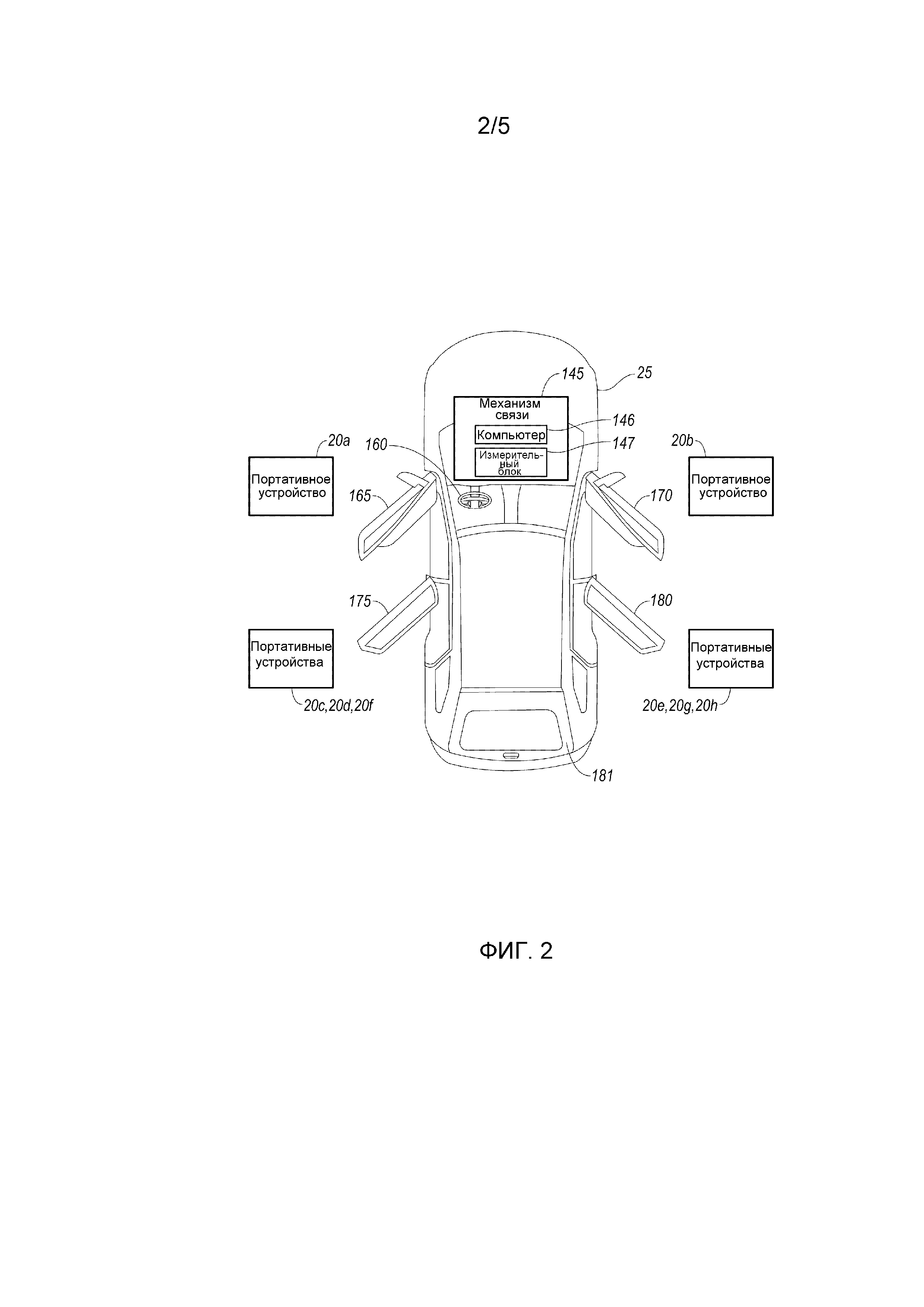
Фиг. 2 - вид сверху примерного устройства, включающего в себя механизм связи для поддержания связи с портативными устройствами.
Фиг. 3 - дополнительный вид сверху примерного транспортного средства по фиг. 2, включающего в себя механизм связи, иллюстрирующий зоны расположения.
Фиг. 4 - дополнительный вид сверху примерного транспортного средства по фиг. 2, иллюстрирующий событие поворачивания.
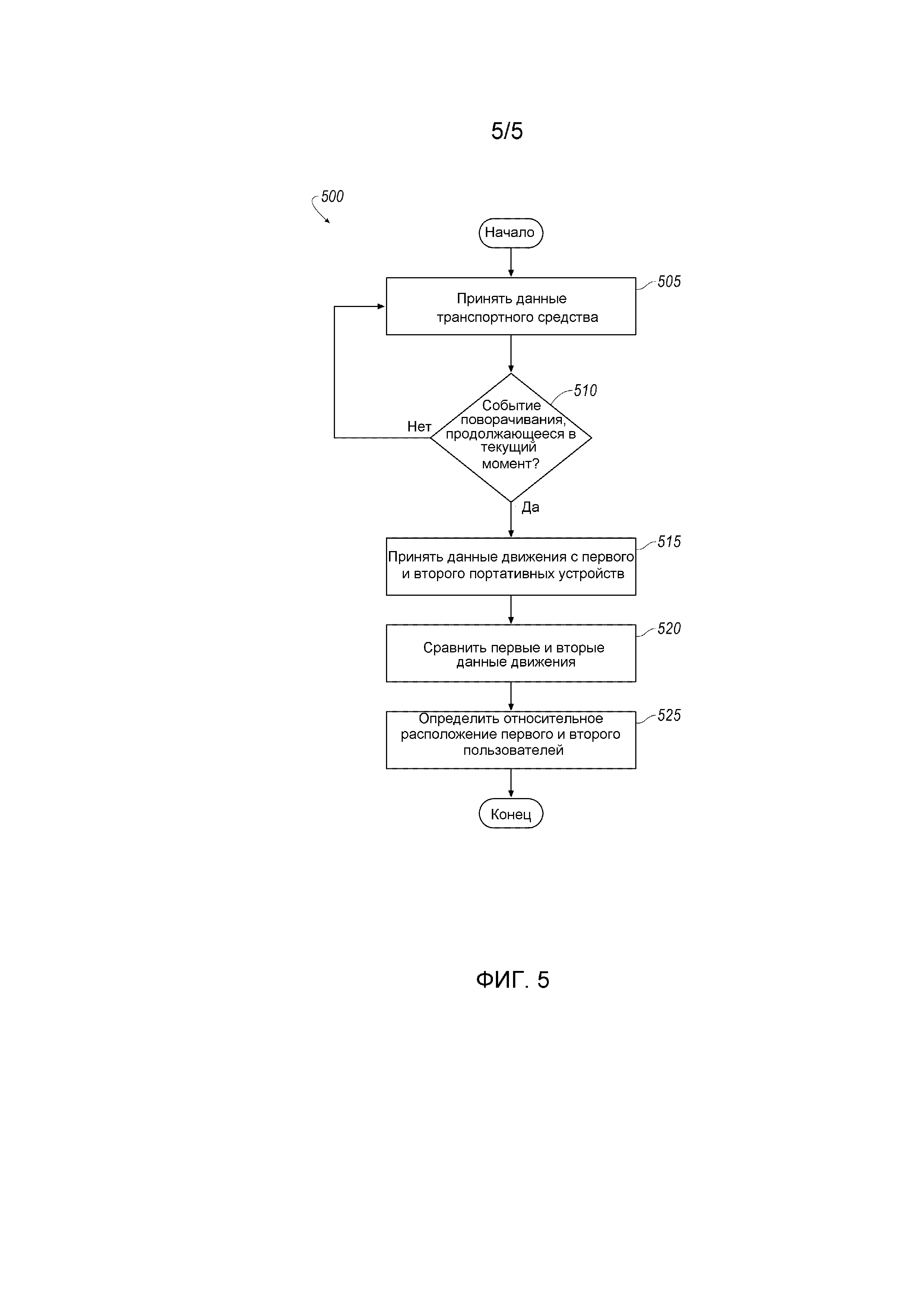
Фиг. 5 - схема примерного процесса определения относительных расположений первого и второго пользователей транспортного средства во время события поворачивания.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Со ссылкой на фиг. 1, данные о движении из одного или более портативных устройств 20, связанных с двумя или более пользователей, во время события поворачивания транспортного средства 25 могут использоваться компьютером 100 для определения расположений пользователей в транспортном средстве 25. Два или более портативных устройств 20, например, могут быть носимыми портативными устройствами 20, носимыми соответствующими пользователями. Компьютер 100 транспортного средства 25 как правило принимает данные транспортного средства с датчиков и контроллеров 115, 120, 125, 130, 135 транспортного средства и запрограммирован определять, по данным транспортного средства, продолжается ли событие поворачивания в текущий момент. На основании определения, что событие поворачивания продолжается в текущий момент, компьютер 100 может отправлять запрос на каждое из двух или более портативных устройств 20 на данные о движении. Компьютер 100 принимает данные о движении соответственно с двух или более портативных устройств 20.
После приема данных о движении компьютер 100 сравнивает соответствующие ускорения, испытываемые каждым из портативных устройств 20. Компьютер 100 затем может определять, например, что первое портативное устройство 20 испытывало более высокое ускорение, чем второе портативное устройство 20. Компьютер 100 дополнительно может определять, что первый пользователь, связанный с первым портативным устройством, расположен радиально снаружи в транспортном средстве относительно второго пользователя, связанного с вторым портативным устройством. То есть, в случае, если транспортное средство 25 поворачивает налево, то первый пользователь расположен по правую сторону от второго пользователя, измеряемые радиально от центра радиуса поворота.
Данные относительного расположения могут комбинироваться с другими данными расположения касательно пользователей, чтобы определять расположение каждого из пользователей внутри транспортного средства 25. Например, следуя примеру, приведенному выше, дополнительно может сохраняться в памяти компьютера 100, например, как подробно описано ниже, что первый и второй пользователи каждый расположен в переднем ряду сидений. На основании идентификации ряда сидений, занятых первым и вторым пользователями, и относительного радиального расположения первого и второго пользователей, компьютер 100 может определять, в случае левого поворота, что первый пользователь расположен на переднем пассажирском сиденье транспортного средства 25, а второй пользователь расположен в водительском сиденье транспортного средства 25.
Определение конкретного расположения, например, конкретного сиденья, занятого пользователем в транспортном средстве 25, может предоставлять компьютеру 100 транспортного средства 25 возможность персонализировать поведенческие особенности пользователя, например, настраивая управление микроклиматом, настраивая положение сиденья, настраивая положения зеркал, и т.д. В дополнение, системы обеспечения безопасности, такие как системы ремней безопасности или системы подушек безопасности могут настраиваться согласно соответствующим расположениям одного или более пользователей внутри транспортного средства 25.
ЭЛЕМЕНТЫ СИСТЕМЫ
Как показано на фиг. 1, система 10 включает в себя устройство дистанционного отпирания дверей без ключа, которое может быть традиционным брелоком или, например, установленным на телефоне телематическим приложением 15 дистанционного отпирания дверей (в дальнейшем - брелок), одно или более портативных устройств 20, транспортное средство 25, сервер 30 и сеть 35. Как описано ниже, брелок 15 и портативное устройство 20 могут быть с возможностью обмена информацией связаны с транспортным средством 25. Кроме того, как описано ниже, портативное устройство 20, например, может быть носимым устройством с или без возможностей сотовой связи, мобильным телефоном, планшетом, и т.д., и может быть с возможностью обмена информацией связан с транспортным средством 25 или опосредованно связан с транспортным средством 25, например, через другое портативное устройство 20. Транспортное средство 25 дополнительно может быть с возможностью обмена информацией связано с сервером 30 через сеть 35.
Брелок 15 выполнен, то есть, включает в себя известные механизмы, такие как программы в компьютере 60 и аппаратное обеспечение, такое как приемопередатчик 65 для беспроводной связи, с возможностью отправлять сообщения на транспортное средство 25, например, команды или инструкции, контролирующие операции транспортного средства 25. Например, брелок 15 может отправлять команды на транспортное средство 25, дающие транспортному средству 25 указание запирать или отпирать двери, открывать крышку багажника или другой люк, запускать зажигание, и т.д. Брелок 15 как правило дополнительно включает в себя пользовательский интерфейс 70. Брелок 15 может быть приложением на портативном устройстве 20, которое отправляет те же самые команды на удаленный сервер 30 или в сеть 35, которые затем могут отправлять команды на транспортное средство 25, дающие транспортному средству 25 указание запирать или отпирать двери, открывать крышку багажника или другой люк, запускать зажигание, и т.д.
Один или более брелоков 15 могут быть спарены с транспортным средством 25. Например, как известно, брелок 15 может быть запрограммирован специфичным идентификационным кодом, а транспортное средство 25 может заключать в себе список идентификационных кодов, авторизованных отправлять команды на транспортное средство 25. Транспортное средство 25 может отыскивать один или более идентификационных кодов по приему сообщений и определять, авторизован ли брелок 15.
Компьютер 60 брелока включает в себя процессор и память. Процессор запрограммирован исполнять программы, хранимые в памяти, например, чтобы отправлять команды на транспортное средство 25. Приемопередатчик 65 выполнен с возможностью передавать радиочастотные (РЧ, RF) сигналы на и, по выбору, принимать РЧ-сигналы из транспортного средства 25. Как показано, рабочие частоты типичного брелока 15 для односторонней связи имеют значения 315 МГц или 433 МГц, а для двухсторонней связи имеют значения 902 МГц или 868 МГц. Что касается систем пассивного отпирания дверей и пассивного запуска, транспортное средство 25 может отправлять команды на брелок 15 с использованием низкочастотных передач (НЧ, LF) на частотах 125 кГц или 135 кГц.
Пользовательский интерфейс 70 брелока 15 включает в себя один или более механизмов ввода и может включать в себя устройство отображения. Механизмы ввода могут быть кнопками, устройством отображения с сенсорным экраном, устройством распознавания жестов, и т.д., для приема ввода от пользователя. Устройство может включать в себя (LCD, жидкокристаллический) ЖКД-дисплей, устройство отображения на СИД, звуковые сигнализаторы, громкоговорители, тактильную обратную связь, и т.д., для выдачи информации пользователю.
Дополнительно или в качестве альтернативы, другие системы также могут использоваться, чтобы давать транспортному средству 25 команду для отпирания, запуска, и т.д. Например, транспортное средство 25 может быть оборудовано системой пассивного отпирания дверей, например, которая отправляет сообщение на брелоки 15, ближайшие к транспортному средству 25, и ожидать ответа от спаренного брелока 15. Другие возможные системы для отпирания/запуска/и т.д., транспортного средства 25 включают в себя кнопочную панель, механический ключ дистанционного отпирания дверей, телематическую систему отпирания, и т.д.
Портативное устройство 20, например, может быть носимым портативным устройством 20 или мобильным портативным устройством 20. Носимое портативное устройство 20 может включать в себя изделие с возможностью соединения, такое как «интеллектуальные» наручные часы, браслет для фитнеса, интеллектуальная одежда, ювелирные изделия, и т.д. Мобильное портативное устройство 20, например, может включать в себя мобильный телефон, планшет, дорожный компьютер, и т.д. Некоторые носимые портативные устройства 20 могут включать в себя встроенные модемы или полные возможности сотовой связи. Другие носимые портативные устройства 20 могут быть нужны для установления соединения или образования пары, например, с мобильным портативным устройством 20, таким как мобильный телефон, планшет, дорожный компьютер, и т.д., для того чтобы устанавливать связь с транспортным средством 25. Каждое портативное устройство 20 типично включает в себя компьютер 75, приемопередатчик 80 и интерфейс 85. Портативное устройство 20 дополнительно может включать в себя один или более датчиков 90, дополнительно обсужденных ниже.
Каждое портативное устройство 20 может быть связано с пользователем. Например, портативное устройство 20 может включать в себя профиль 101 пользователя и отправлять профиль 101 пользователя на транспортное средство 25, когда портативное устройство 20 инициирует связь с транспортным средством 25. В качестве альтернативы, портативное устройство 20 могло быть спарено с транспортным средством 25, например, с помощью системы синхронизации в транспортном средстве 25. В этом случае, транспортное средство 25 может поддерживать профиль 101 пользователя, связанный со спаренным (синхронизируемым) портативным устройством 20.
Профиль 101 пользователя может быть набором данных, связанных с пользователем. Профиль 101 пользователя может включать в себя данные, такие как предпочитаемые пользователем регулировки транспортного средства (например, регулировки сидений, регулировки зеркал, регулировки температуры, радиостанция), характеристики пользователя (например, высоту, вес, возраст, медицинские условия), заведенный порядок (типично, поездки на работу утром в рабочие дни), и т.д. Профиль 101 пользователя может поддерживаться компьютером 100 на транспортном средстве 25. Дополнительно или в качестве альтернативы, одно или более портативных устройств 20 могут поддерживать профиль 101 пользователя, идентифицированный пользователем. Профили 101 пользователя, поддерживаемые на портативных устройствах 20, могут подвергаться доступу транспортным средством 25 и комбинироваться с данными в профиле 101 пользователя транспортного средства 25. Данные в профиле 101 пользователя могут вводиться пользователем через интерфейс на транспортном средстве 25 или одном из портативных устройств 20, связанных с пользователем, определяться компьютером 100 в транспортном средстве 25, загружаться из других вычислительных устройств, например, сервера 30, и т.д.
Портативное устройство 30 может быть выполнено с возможностью для беспроводной связи малой дальности с транспортным средством 25. Например, приемопередатчик 80 портативного устройства 20 может быть приемопередатчиком BLUETOOTH®, способным формировать соединения с другими приемопередатчиками Bluetooth. Одно или более портативных устройств 20 и транспортное средство 25 могут обмениваться сообщениями соответствующим образом. Портативное устройство 20 может передавать сигнал, например, включающий в себя идентификационные данные (идентифицирующие тип пользовательского устройства, идентичность пользователя, и т.д.), данные о движении и т.д., на транспортное средство 25. В дополнение к или в качестве альтернативы BLUETOOTH, другие пригодные протоколы беспроводной связи, например, NFC, IEEE 802.11 или другие протоколы, как может быть известно, могут использоваться для связи между портативными устройствами 20 и транспортным средством 25.
Кроме того, портативное устройство 20 может быть выполнено с возможностью устанавливать соединение с другими портативными устройствами 20. Например, первое портативное устройство может быть интеллектуальными наручными часами, а второе портативное устройство 20 может быть мобильным телефоном. Первое портативное устройство 20 может устанавливать соединение со вторым портативным устройством 20 и обмениваться данными со вторым портативным устройством 20; первое и второе портативные устройства 20 могут быть связаны с одним и тем же пользователем. В качестве одного из примеров, первое портативное устройство 20 может включать в себя биометрические датчики 90 для измерения частоты сердечных сокращений пользователя и передавать частоту сердечных сокращений на второе портативное устройство 20. Второе портативное устройство 20 может выводить данные частоты сердечных сокращений пользователю через интерфейс 85 второго портативного устройства 20. Линии связи Bluetooth типично действуют на частотах от 2402-2480 МГц. Как приведено выше, другие пригодные протоколы беспроводной связи, такие как известные, могут в качестве альтернативы или дополнительно использоваться для формирования линий связи с другими портативными устройствами 20.
В дополнение к биометрическим датчикам 90, датчики 90 портативных устройств 20 могут включать в себя измерители ускорения, датчики перегрузки, гироскопы, компасы, световые датчики, камеры, и т.д. Датчики 90 могут измерять движения портативного устройства 20 и выводить данные о движении, которые портативное устройство 20 затем может передавать на транспортное средство 25. Как описано ниже, транспортное средство 25 может определять, на основании данных о движении, например, что пользователь портативного устройства 20 открыл дверь транспортного средства 25.
Транспортное средство 25 как правило является наземным транспортным средством, имеющим три или более колес, например, пассажирским автомобилем, грузовым автомобилем малой грузоподъемности, и т.д. Транспортное средство 25, соответственно, как правило имеет переднюю часть, заднюю часть, левую сторону и правую сторону, при этом, термины передний, задний, левый и правый понимаются с ракурса пользователя транспортного средства 25, сидящего в водительском сиденье в стандартном рабочем положении, то есть, обращенного к рулевому колесу 160 (фиг. 2). Транспортное средство 25 включает в себя компьютер 100, включающий в себя процессор и память. Память включает в себя одну или более форм машиночитаемых носителей и хранит инструкции, исполняемые процессором, для выполнения различных операций, в том числе, как раскрытые в материалах настоящего документа. Кроме того, компьютер 100 может включать в себя и/или быть связан с возможностью обмена информацией с более чем одним другим компьютером, например, датчиками 115 рулевого управления, датчиками 120 двери, датчиками 125 сиденья, другими датчиками 130 и контроллерами 135. Компьютер 100 транспортного средства, кроме того, типично связан с возможностью обмена информацией с механизмами 145 связи, выполненными с возможностью для поддержания беспроводной связи с бортовыми и внешними беспроводными устройствами, в том числе, брелоком 15, портативным устройством 20, удаленным сервером 30 и сетью 35.
Компьютер 100, как правило, запрограммирован и выполнен с возможностью для поддержания связи по шине локальной сети контроллеров (CAN) или тому подобному. Вычислительное устройство 100 также может иметь соединение с разъемом бортовой диагностики (OBD-II), например, согласно стандарту J1962. Через шину CAN, порт с разъемом OBD-II и/или другие проводные или беспроводные механизмы, компьютер 100 может передавать сообщения в различные устройства в транспортном средстве и/или принимать сообщения с различных устройств, например, контроллеров, исполнительных механизмов, датчиков, и т.д. В дополнение, компьютер 100 может быть выполнен с возможностью для поддержания связи, например, с одним или более удаленных серверов 30, с одним или более портативных устройств 20 и/или с сетью 35.
Датчики 115 рулевого управления могут быть датчиками угла поворота управляемых колес, датчиками крутящего момента рулевого управления, датчиками электродвигателя, связанными с системой рулевого управления с усилителем, и т.д., известными для предоставления данных, непосредственно или опосредованно связанных с операциями рулевого управления. Например, датчик 115 рулевого управления может быть датчиком угла поворота управляемых колес, который считывает поворачивание рулевого колеса 160 транспортного средства 25 и передает данные поворачивания рулевого колеса 160 в вычислительное устройство 100. В качестве еще одного примера, датчик 115 рулевого управления может считывать вращение электродвигателя, обеспечивающего усиление для операций рулевого управления, и выдавать данные вращения электродвигателя в компьютер 100.
Датчики 120 дверей могут быть механическими переключателями, которые вводятся в действие дверью, датчиками близости или присутствия, датчиками на эффекте Холла, или тому подобными, такими как известные, которые указывают, открыта ли или закрыта дверь, и которые выдают данные состояния двери в вычислительное устройство 100. Например, может быть один датчик 120 двери, связанный с каждой дверью транспортного средства 25, в том числе, задней наклонной дверью или задней подъемной дверью.
Датчики 125 сиденья могут включать в себя многообразие датчиков, в том числе, датчики занятости и датчики положения сиденья, такие как известные. Датчики 125 сиденья, например, могут определять, занимает ли пользователь сиденье, определять вес пользователя и передавать определенный вес в компьютер 100. Кроме того, датчики 125 сиденья могут выявлять, непосредственно или опосредованно, положение сиденья, угол спинки сиденья, высоту подголовника, и т.д., и выдавать данные в компьютер 100 касательно одной или более из этих регулировок. Кроме того дополнительно, компьютер 100, например, по идентификации пользователя сиденья, настраивает регулировки под профиль пользователя, связанный с пользователем.
Транспортное средство 25 может включать в себя один или более других датчиков 130. Другие датчики 130 могут включать в себя, только в качестве неограничивающего примера, камеры, оптические датчики, радиолокатор, микрофоны, датчики близости или присутствия, ультразвуковые датчики, датчики давления, измерители ускорения, гироскопы, датчики температуры, датчики тока, датчики напряжения, инфракрасные датчики, емкостные датчики, и т.д. Датчики могут включать в себя процессоры и память, и могут быть выполнены с возможностью поддерживать связь с и отправлять данные в компьютер 100, например, через шину CAN, или тому подобное.
Транспортное средство 25 также может включать в себя один или более контроллеров 135 для управления компонентами транспортного средства 25. Один или более контроллеров 135 могут включать в себя известные контроллеры, в качестве неограничивающих примеров, контроллер сиденья, контроллер рулевого управления с усилителем, контроллер дверного замка, контроллер дверной защелки, контроллер микроклимата, контроллер регулировки зеркал, контроллер ремней безопасности, контроллер микроклимата, контроллер тормозов, и т.д. Каждый из контроллеров 135 может включать в себя соответствующие процессоры и память, один или более исполнительных механизмов и один или более датчиков, как известно. Контроллеры 135 могут быть выполнены с возможностью принимать инструкции из вычислительного устройства 100 и управлять исполнительным механизмом на основании таких инструкций. Например, контроллер 135 дверного замка может принимать инструкцию отпереть дверь и может побуждать исполнительный механизм отпирать электродвигатель замка с защелкой, связанный с дверью. Кроме того, контроллер 135 может включать в себя датчики. Датчики, например, могут выявлять действие исполнительного механизма. Например, контроллер 135 дверного замка может выявлять нахождение замка в незапертом состоянии. Контроллер 135 может выдавать данные касательно состояния замка в компьютер 100.
Как изложено выше, транспортное средство 25 дополнительно может включать в себя механизм 145 связи для беспроводной связи с бортовыми и внешними устройствами транспортного средства, выполненными с возможностью для беспроводной связи. Например, механизм 145 связи может включать в себя компьютер 146, имеющий процессор и память, и измерительное устройство 147. Связь может быть непосредственной связью, то есть, между приемопередатчиком в механизме 145 связи и приемопередатчиком в беспроводном устройстве, или опосредованной связью, например, через сеть, такую как сеть 35.
Блок 145 как правило может быть выполнен с возможностью поддерживать связь с односторонними (типично 315 МГц или 433 МГц) или двухсторонними (типично 902 МГц или 868 МГц) системами дистанционного отпирания дверей без ключа (RKE), системами пассивного отпирания дверей и пассивного запуска (PEPS) (НЧ-запрос на 125 кГц и ответ на 315 МГц или 433 МГц), связь через поле в ближней зоне (NFC) (типично 13,56 МГц), системами Bluetooth (2402-2408 МГц), системами между транспортными средствами (V2V) и системами между транспортным средством и инфраструктурой (V2I) в полосе (5,9 ГГЦ) специализированной связи малой дальности (DSRC), портативными устройствами в полосах сотовой связи, Wi-Fi (типично, полосах 2,4 ГГц или 5ГГц), системами GPS (1575,42 МГц и 1227,6 МГц), и т.д. Примеры протоколов, которые может поддерживать блок 145 связи, включают в себя протоколы Bluetooth, NFC, DSRC, UMTS (Универсальной системы мобильной связи) 3G (3-его поколения), как определенные комитетом по стандартизации 3GPP (Проекта партнерства 3-его поколения), протоколы LTE (долгосрочного развития) 4G (4-ого поколения), как определенные комитетом по стандартам 3GPP, протоколы Wi-Fi 802.11, как определенные IEEE (Институтом инженеров по электротехнике и электронике), протоколы W-Max 802.16, как определенные IEEE, или другие пригодные протоколы беспроводной связи.
Как подробнее описано ниже, механизм 145 связи может быть выполнен с возможностью поддерживать связь с брелоком 15, портативным устройством 20 и, через сеть 35, с удаленным сервером 30.
Механизм 145 связи может быть выполнен с возможностью устанавливать связь с одним или более портативных устройств 20. По приему инструкции отпереть транспортное средство, как описано выше, компьютер 100 может давать механизму 45 связи указание отыскивать и устанавливать связь с портативными устройствами 20, ближайшими к, например, в пределах 3 метров от транспортного средства 25. Механизм 145 связи может отыскивать все портативные устройства 20, ближайшие к транспортному средству, например, конкретный список портативных устройств 20, связанных с известными пользователями транспортного средства 25. Портативные устройства 20 затем могут отвечать механизму 145 связи. В еще одном сценарии, механизм 145 связи может, например, периодически отыскивать и устанавливать связь с портативными устройствами 20, ближайшими к транспортному средству 25. По установлению связи с устройствами 20, блок 145 связи может отправлять инструкции, запрашивающие идентификационные данные пользователя, данные о движении и т.д., с портативных устройств 20. В определенных сценариях, компьютер 100 в особенности может непосредственно или опосредованно устанавливать связь с носимыми портативными устройствами 20.
В дополнение к поддержанию связи с одним или более портативных устройств 20, механизм 145 связи может определять интенсивность сигналов, принимаемых с соответствующих портативных устройств 20. Как показано на фиг. 1, механизм 145 связи может включать в себя измерительный блок 147. Измерительный блок 147 может принимать сигналы с портативных устройств 20 и измерять интенсивность сигнала известным образом. Когда применимо, например, при стремлении определять расположение пользователя, измерительный блок 147 должен измерять интенсивность сигнала, передаваемого с носимого портативного устройства 20, а не сигнала, передаваемого с вспомогательного мобильного портативного устройства 20. Измерительный блок 147 может выдавать эту информацию в компьютер 100. Как описано ниже, интенсивность сигнала, принимаемого с портативного устройства 20, может быть указанием расстояния (также указываемого ссылкой в материалах настоящего документа как дальность) портативного устройства 20 от механизма 145 связи. Эта информация может использоваться, особенно в случае носимого портативного устройства 20, для определения границы или зоны, где пользователь носимого портативного устройства 20 расположен в пределах транспортного средства 25. Измерительный блок 147 может определять эти зоны одной приемно-передающей антенной. В качестве альтернативы, две или более антенн могут использоваться, например, если они существуют для других признаков.
Механизм 145 связи транспортного средства 25 дополнительно может быть выполнен с возможностью поддерживать связь, например, через сеть 35, с удаленным сервером 30. Например, когда транспортное средство 25 было вовлечено в происшествие, транспортное средство 25 может быть способно передавать сообщение на удаленный сервер 30, указывающее, что транспортное средство 25 было вовлечено в происшествие, и может быть способным отправлять дополнительную информацию, такую как местоположение транспортного средства 25. Когда транспортное средство 25 связано с одним или более портативных устройств 20, транспортное средство 25, через механизм 145 связи дополнительно или в качестве альтернативы, может быть способно отправлять информацию о состоянии пользователя, такую как основные показатели состояния организма, на удаленный сервер 30.
Сеть 35 представляет собой один или более механизмов, посредством которых транспортное средство 25 может поддерживать связь с удаленными вычислительными устройствами, и может быть одним или более из различных проводных или беспроводных механизмов связи, в том числе, любой требуемой комбинацией проводных (например, кабельных или волоконных) и/или беспроводных (например, сотовых, беспроводных, спутниковых, сверхвысокочастотных или радиочастотных) механизмов связи и любой требуемой топологии сети (или топологий, когда используются многочисленные механизмы связи). Примерные сети связи включают в себя беспроводные сети связи, локальные сети (LAN) и/или глобальные сети (WAN), в том числе, сеть Интернет, обеспечивающие услуги передачи данных.
ПРОЦЕССЫ
Идентификация отпирания транспортного средства или другого пускового события для процесса идентификации расположения пользователя
Компьютер 100 транспортного средства 25 может принимать сигнал с брелока 15 для отпирания транспортного средства 25 или распознавать другое пусковое событие для запуска процесса идентификации расположения пользователя. Например, пользователь транспортного средства 25 может вводить в действие брелок 15, и брелок 15 может отправлять команду отпирания на транспортное средство 25. Компьютер 100 транспортного средства может принимать сигнал отпирания и инициировать процесс идентификации расположений одного или более пользователей в транспортном средстве 25.
В качестве еще одного примера, датчик 130 может выявлять захватывание или касание пользователем дверной ручки, чтобы тянуть дверную ручку на себя с намерением открыть дверь и, на основании выявления, компьютер 100 может инициировать установление связи с брелоками 15, ближайшими к транспортному средству 25, для авторизации отпирания двери. Компьютер 100 может определять, что один или более из брелоков 15 являются авторизованным брелоком 15 для транспортного средства 25, например, как описанным выше образом. Наоборот, если дверь уже была отперта, пусковой механизм датчика 130 по-прежнему может использоваться для информирования компьютера 100, что пользователь собирается открыть дверь. Компьютер 100 также может принимать входной сигнал из кнопочной панели на транспортном средстве 25, события отпирания двери или события общего отпирания, введенного в действие механическим ключом, зажигания, введенного в действие механическим ключом, из телематической системы, и т.д., который идентифицируется в качестве пускового события для инициирования процесса идентификации расположения пользователя. Кроме того дополнительно, компьютер 100 мог бы инициировать процесс идентификации расположения пользователя периодически, на основании таймера, и т.д.
Связывание портативных устройств с пользователями
Компьютер 100, как правило, запрограммирован инициировать процесс поддержания связи с одним или более портативных устройств 20, ближайших к транспортному средству 25. Например, компьютер 100 может приводиться в действие, чтобы инициировать связь, как описано выше. Компьютер 100 может отправлять команды на портативные устройства 20, которые были спарены, например, владельцем, с транспортным средством 25, запрашивающие, чтобы портативные устройства 20 отвечали и предоставляли идентификацию. Компьютер 100 дополнительно может прослушивать другие, не спаренные ранее портативные устройства 20, которые находятся рядом с транспортным средством 25. Кроме того, компьютер 100 может прослушивать сообщения между портативными устройствами 20. На основании данных, собранных из сообщений, например, каждое портативное устройство 20 может передавать идентификатор, или тому подобное, компьютер 100 может идентифицировать портативное устройство 20 или группу портативных устройств 20, связанных с пользователем, и кроме того, может связывать пользователя или группу портативных устройств 20 с профилем 101 пользователя, например, поддерживаемым компьютером 100. Компьютер 100 затем может ожидать в течение предопределенного периода времени, например, 10 секунд, вслед за передачей команд на портативные устройства 20 и приступать к идентификации одной или более групп портативных устройств 20 и связыванию портативных устройств 20 и/или групп портативных устройств 20 с пользователями.
Идентификация событий открывания двери по движениям носимого устройства
По распознаванию пускового события, компьютер 100 может инициировать процесс выдачи указаний портативному устройству 20, которое может быть носимым портативным устройством 20, регистрировать данные датчика перегрузок в течение заданного периода, чтобы идентифицировать движения рук, а затем, контролировать все датчики 120 дверей транспортного средства 25, чтобы определять, где пользователи входили в транспортное средство 25. Компьютер 100 может контролировать движения датчиков перегрузки портативных устройств 20, связанных с пользователями транспортного средства 25, и, на основании данных о движении, идентифицировать устройство 20, а отсюда, пользователя, который может быть связан с открыванием конкретной двери транспортного средства 25. В случае только одного открывания двери или только одного портативного устройства 20, идентифицируемых конфигурацией данных о движении с определенными чертами, может быть возможным делать вывод, кто сел через такую дверь. В случаях, где открылось большее количество дверей, чем выявленных портативных устройств 20, дополнительные данные требуются для предсказания расположения пользователя. Компьютер 100 дополнительно может использовать данные о движении в качестве указания, где пользователь расположен в транспортном средстве 25 после входа в транспортное средство 25.
Далее, со ссылкой на фиг. 2, транспортное средство 25 может включать в себя рулевое колесо 160, переднюю левую дверь 1654, переднюю правую дверь 170, заднюю левую дверь 175, заднюю правую дверь 180 и заднюю наклонную дверь 181. Транспортное средство 25 дополнительно может включать в себя механизм 145 связи. Механизм 145 связи может быть расположен в передней центральной части транспортного средства 25. В качестве альтернативы, например, часть механизма 145 связи, используемая для установления связи с портативными устройствами 20, может быть расположена в центральной передней части транспортного средства 25, а другие части механизма 145 связи могут быть расположены в одном или более других мест в транспортном средстве 25. Часть механизма 145 связи, используемая для установления связи с портативными устройствами 20, должна быть стратегически размещена так, чтобы интенсивность сигнала, принимаемого с соответствующего портативного устройства 20, была указывающей определимую зону в пределах транспортного средства 25.
Как описано выше, механизм 145 связи может включать в себя измерительный блок 147 и может быть выполнен с возможностью устанавливать связь с портативными устройствами 20. Измерительный блок 147 может быть выполнен с возможностью измерять интенсивность сигналов, принимаемых с портативных устройств 20, и сообщать интенсивность сигналов из соответствующих портативных устройств 20 в компьютер 100 транспортного средства 25.
По идентификации пускового события для инициирования процесса идентификации расположения пользователя, как описано выше, компьютер 100, на основании пускового события, может вводить в действие механизм 145 связи и давать указание механизму 145 связи отыскивать и устанавливать связь с портативными устройствами 20, ближайшими к транспортному средству 25. Компьютер 100 может ограничивать поиск спаренными ранее портативными устройствами 20. Как приведено выше, когда применимо, например, при попытке идентифицировать дальность пользователя от механизма 145 связи, измерительный блок 147 должен измерять интенсивность сигнала, передаваемого с носимого портативного устройства 20, а не сигнала, передаваемого с вспомогательного мобильного портативного устройства 20.
Как показано на фиг. 2, в одном из примеров, компьютер 100 может находить и устанавливать связь (с помощью механизма 145 связи) с портативными устройствами 20a-20h, которые определены носимыми портативными устройствами 20. Компьютер 100 может давать команду каждому из носимых портативных устройств 20a-20h отправлять данные о движении, связанные с соответствующими носимыми портативными устройствами 20a-20h, в компьютер 100.
Посредством контроля и оценки данных о движении, принятых из носимых портативных устройств 20a-20h, компьютер 100, например, может определять, что пользователь носимого портативного устройства 20a открыл левую дверь 165, 175. Конкретные движения запястья, например, одно или более из скручивания против часовой стрелки для захватывания дверной ручки, поворачивания вверх и влево для открывания дверной ручки, поворачивания влево на дугу, аналогичную дуге дверной ручки на открываемой левосторонней двери, могут быть указывающими открывание левой двери 165, 175 транспортного средства 25.
Подобным образом, вычислительное устройство 100, например, может определять, что пользователь носимого портативного устройства 20d также открывал левую дверь 165, 175, а кроме того, подобным образом, посредством идентификации жестов, связанных с правой дверью, например, что пользователь носимого портативного устройства 20e открыл правую дверь 170, 180.
В дополнение к идентификации движений носимого портативного устройства 20, носимого пользователем на руке, используемой для открывания двери, другие типы движений могут идентифицироваться в качестве движений, указывающих открывание двери. Например, что касается пользователя, открывающего правую дверь 170, 180 своей правой рукой и носящего носимое портативное устройство 20 на своей левой руке, конкретные движения, например, поворачивание левой руки вокруг тела во время открывания двери (или входа в транспортное средство 25) могут быть указывающими событие открывания правой двери 170, 180. Другие движения носимых устройств 20 могут определяться характерными для открывания двери 165, 170, 175, 180,181 транспортного средства 25. Кроме того, движения, которые характерны закрыванию двери 165, 170, 175, 180 транспортного средства 25, могут указывать пользователя, севшего через левую дверь или правую дверь.
Как описано выше, определение, что пользователь открыл конкретную дверь 165, 170, 175, 180, 181 транспортного средства 25, может выполняться компьютером 100. Дополнительно или в качестве альтернативы, определение, например, может производиться компьютером 75 в соответствующем носимом портативном устройстве 20, а результаты передаваться в компьютер 100. Дополнительно или в качестве альтернативы, определение может производиться другим компьютером, с возможностью обмена информацией присоединенным к компьютеру 100.
Идентификация зон расположения для носимых устройств на основании интенсивности принятого сигнала
Дополнительная информация касательно расположения пользователей в транспортном средстве 25 может определяться на основании интенсивности принимаемого сигнала по сигналам, принятым механизмом 145 связи с портативных устройств 20. Когда применимо, например, при попытке определять дальность пользователя от механизма 145 связи, портативные устройства 20 могут быть носимыми портативными устройствами 20.
Как показано на фиг. 3, транспортное средство 25 может быть разделено на три или более зон на основании расстояния от механизма 145 связи; первую зону 185, вторую зону 190 и третью зону 195. Зоны 185, 190, 195, например, могут быть радиально профилированы вокруг части приемника, например, антенны, в механизме 145 связи. В качестве еще одного примера, часть приемника в механизме 145 связи может быть направленной, то есть, иметь чувствительность приема, которая является большей в некоторых направлениях, чем в других, и зоны 185, 190, 195 могут определяться направленностью части приемника.
Кроме того, зоны 185, 190, 195 могут продолжаться за пределы транспортного средства 25, и/или механизм 145 связи может принимать сигналы извне определенных зон 185, 190, 195. Например, механизм 145 связи может быть способен принимать сигнал с портативного устройства 20, которое находится за пределами третьей зоны 195. Кроме того, зоны 185, 190, 195 могут формировать набор концентрических окружностей вокруг приемной части и включают в себя зоны вне транспортного средства 25. Механизм 145 связи может определять, на основании RSSI портативного устройства 20, что портативное устройство 20 находится в пределах дальности для поддержания связи с механизмом 145 связи, но вне третьей зоны 195.
Портативные устройства 20a и 20b могут быть расположены в первой зоне 185. Портативные устройства 20c, 20d, 20e могут быть расположены во второй зоне 190, а портативные устройства 20f, 20g, 20h могут быть расположены в третьей зоне 195. Как приведено выше, каждое из портативных устройств 20a-20h может быть носимым портативным устройством 20. К тому же, как приведено выше, вычислительное устройство 100 может устанавливать связь с помощью механизма 145 связи с каждым из портативных устройств 20a-20h.
Механизм 145 связи может быть выполнен с возможностью измерять интенсивность принимаемого сигнала по сигналам, принятым с каждого из портативных устройств 20a-20h, и выдавать индикацию уровня принимаемого сигнала (RSSI), такую как известная, в компьютер 100, соответственно, для каждого из портативных устройств 20a-20h.
На основании соответствующих интенсивностей принимаемых сигналов, компьютер 100 может определять зону, в которой расположено каждое из портативных устройств 20a-20h. Например, если RSSI является большим, чем или равным первому предопределенному пороговому значению и меньшим, чем второе предопределенное пороговое значение, вычислительное устройство может определять, что связанное портативное устройство 20 расположено в пределах третьей зоны 195. Если RSSI является большим, чем или равным второму предопределенному пороговому значению и меньшим, чем третье предопределенное пороговое значение, компьютер 100 может определять, что связанное портативное устройство 20 расположено во второй зоне 190. Если RSSI является большим, чем или равным третьему предопределенному пороговому значению, компьютер 100 может определять, что связанное портативное устройство 20 расположено во первой зоне 185. Первый, второй и третий предопределенные пороговые значения могут определяться опытным путем на основании образцовых портативных устройств 20, расположения механизма 145 связи, типа транспортного средств 25, и т.д. В примере согласно фиг. 3, компьютер 100 определял бы, что портативные устройства 20a-20b находятся в первой зоне 185, устройства 20c-20e находятся во второй зоне 190, и устройства 20f-20h находятся в третьей зоне 195.
Идентификация водителя и пассажира переднего сиденья на основании данных открывания двери и зоны
На основании данных открывания двери и данных зоны, собранных выше, компьютер 100 может быть запрограммирован определять водителя и переднего пассажира транспортного средства 25.
Например, если, как описано выше, компьютер 100 определяет, на основании RSSI портативного устройства 20a, что портативное устройство 20 находится в первой зоне 185, и определяет, на основании данных о движении из портативного устройства 20a, что пользователь портативного устройства 20a сел через левую дверь транспортного средства 25, компьютер 100 дополнительно может определять, что пользователь портативного устройства 20a расположен на переднем левом (водительском) сиденье транспортного средства 25.
Кроме того, если, в примере, приведенном выше, компьютер 100 определяет, на основании RSSI портативного устройства 20b, что портативное устройство 20b также находится в первой зоне 185, компьютер 100 может определять, что пользователь портативного устройства 20b находится на переднем пассажирском сиденье. Такой же процесс определения расположения водителя и пассажира переднего ряда также может применяться к транспортным средствам с правым рулем посредством обращения зависимостей от выявленных событий открывания дверей.
Идентификация относительных расположений пользователей транспортного средства на основании данных ускорения во время события поворачивания
Во время события поворачивания, то есть, когда транспортное средство 25 поворачивает, портативные устройства 20 в транспортном средстве как правило будут испытывать ускорение. Ускорение, испытываемое каждым портативным устройством 20, будет зависеть от расположения портативного устройства 20 в транспортном средстве 25. Как описано ниже, компьютер 100 может принимать данные о движении соответственно с каждого из портативных устройств 20 и может определять относительное расположение портативных устройств 20, например, первого портативного устройства 20 по отношению к второму портативному устройству 20, на основании данных о движении. Как правило, во время события поворачивания, портативные устройства 20, расположенные на стороне транспортного средства 25, соответствующей направлению поворота, например, на левой стороне транспортного средства во время левого поворота, будет перемещаться на более низкой скорости и испытывать более низкое ускорение, чем портативное устройство 20, расположенное на стороне транспортного средства 25, противоположной направлению поворота. Когда применимо, например, при попытке определять расположение первого пользователя относительно второго пользователя на основании данных ускорения во время события поворачивания, портативные устройства 20 могут быть носимыми портативными устройствами 20.
В качестве примера, со ссылкой на фиг. 4, транспортное средство может быть поворачивающим налево. Портативные устройства 20a-20h каждое может быть разном месте в транспортном средстве 25, как показано. Вследствие разных расположений, каждое из портативных устройств 20a-20h будет перемещаться по разной траектории во время события поворачивания, а отсюда, поэтому, как правило испытывать ускорение, иное чем ускорение(ия), испытываемое другими устройствами 20. В этом примере, портативные устройства 20a и 20c перемещаются приблизительно по первой траектории 201 и испытывают первое ускорение a1. Портативные устройства 20d и 20f перемещаются приблизительно по второй траектории 202 и испытывают приблизительно второе ускорение a2. Портативные устройства 20b, 20e и 20g перемещаются приблизительно по третьей траектории 203 и испытывают приблизительно третье ускорение a3. Портативное устройство 20h перемещается приблизительно по четвертой траектории 204 и испытывает четвертое ускорение a4. Согласно примеру, приведенному выше, a4 > a3 > a2 > a1. Например, большее ускорение a3, испытываемое портативным устройством 20e, относительно ускорения a2, испытываемого портативным устройством 20d, указывает, что портативное устройство 20e расположено радиально снаружи от портативного устройства 20d. Кроме того, компьютер 100 также может использовать данные ускорения, полученные с датчиков транспортного средства (например, датчика столкновения), в качестве дополнительной точки отсчета. Например, датчик транспортного средства находится в известном положении, поэтому, значения ускорения с портативных устройств 20 также могут соотноситься с показаниями ускорения с датчика транспортного средства, чтобы получать дополнительные данные о расположении.
По-прежнему следуя примеру по фиг. 4, компьютер 100 может определять, на основании данных из датчиков и контроллеров 115, 120, 125, 130, 135 транспортного средства, что событие поворачивания является продолжающимся в текущий момент. Например, событие поворачивания может быть определено в качестве транспортного средства, поворачивающего на угол, больший, чем десять градусов (10º), в течение периода времени, большего чем одна секунда.
После определения, что событие поворачивания является продолжающимся в текущий момент, компьютер 100 может отправлять запрос на портативные устройства 20a-20h на данные о движении с каждого из портативных устройств 20a-20h во время события поворачивания. Компьютер 100 может определять период времени, например, задавать время начала и длительность, для которых компьютер 100 запрашивает данные о движении. Портативные устройства 20a-20h могут, по приему запроса, отправлять данные, характеризующие движение соответствующих портативных устройств 20a-20h в течение периода времени.
На основании принятых данных о движении компьютер 100 может определять ускорения, испытываемые соответственно каждым из портативных устройств 20a-20h. В качестве еще одного примера, компьютер 100 может выбирать конкретное время в течение периода времени и определять ускорение каждого из портативных устройств 20a-20h за период времени. Дополнительно или в качестве альтернативы, компьютер 100 может определять среднее ускорение, испытываемое соответственно каждым из портативных устройств 20a-20h в течение периода времени. В качестве еще одного альтернативного варианта, компьютер 100 может определять пиковое ускорение, испытываемое соответственно каждым из портативных устройств 20a-20h в течение периода времени.
Вслед за определением ускорения соответственно для каждого из портативных устройств 20a-20h, компьютер 100 может определять относительное расположение портативных устройств 20a-20h, друг относительно друга.
Например, по-прежнему следуя примеру, приведенному выше, ускорение портативных устройств 20d и 20f будет иметь значение приблизительно a2 наряду с тем, что ускорение портативных устройств 20a и 20c будет иметь значение приблизительно a1. На основании этих значений ускорения, компьютер 100 может определять, что портативные устройства 20d, 20f расположены радиально снаружи от портативных устройств 20a, 20c, в то время как измеряются от центра c1 поворота. Аналогично, портативные устройства 20b, 20e, 20g с ускорением приблизительно a3 могут определяться находящимися радиально снаружи от портативных устройств 20d, 20f, а портативное устройство 20h может быть определено находящимся радиально снаружи от портативных устройств 20b, 20e, 20g.
Использование данных ускорения для подтверждения/определения расположения сиденья пользователя
Как описано выше, компьютер 100 транспортного средства 25 может определять, в некоторых обстоятельствах, на основании данных открывания дверей и данных интенсивности сигнала с портативных устройств 20a-20h, пассажиров и водителя водительского сиденья и переднего пассажирского сиденья. Компьютер 100 дополнительно может определять, на основании указания интенсивности принятого сигнала каждого из соответствующих портативных устройств 20, зону, например, первую, вторую и третью зоны 185, 190, 195 по фиг. 3, где расположен пользователь каждого из соответствующих портативных устройств 20a-20h. Однако, пользователи транспортного средства 25 могут менять сиденья, не выходя из транспортного средства 25. Кроме того, данных зоны, характеризующих зону, в которой расположен пользователь, как правило недостаточно для определения, в каком сиденье расположен пользователь. Соответственно, данные ускорения преимущественно могут использоваться для подтверждения и/или дополнения таких данных интенсивности сигнала.
Например, расположения пользователей транспортного средства 25 могут подтверждаться или определяться с дополнительной точностью, например, посредством комбинирования данных зоны, основанных на интенсивностях сигналов портативных устройств 20, с данными относительного положения, основанными на ускорениях портативных устройств 20 во время события поворачивания.
По-прежнему следуя примеру по фиг. 4, на основании указаний интенсивностей принятых сигналов, компьютер 100 может определять, что портативные устройства 20a и 20b расположены в первой зоне 185. На основании сравнений ускорения портативных устройств 20a, 20b во время события поворачивания, компьютер 100, например, может определять, что портативное устройство 20a расположено радиально внутри от портативного устройства 20b во время левого поворота. Посредством комбинирования данных зоны с данными относительного положения, компьютер 100 может определять, что пользователь, связанный с портативным устройством 20a, находится в водительском сиденье, а пользователь, связанный с портативным устройством 20b, находится на переднем пассажирском сиденье.
Подобным образом, что касается второй зоны 190, компьютер 100 может определять, на основании указаний интенсивностей принятых сигналов, что портативные устройства 20c, 20d и 20e расположены во второй зоне 190. На основании сравнений ускорения портативных устройств 20c, 20d, 20e во время события поворачивания, компьютер 100 может определять, что пользователь портативного устройства 20c находится слева от пользователя портативного устройства 20d, а кроме того, что пользователь портативного устройства 20d находится слева от пользователя портативного устройства 20e. С использованием аналогичных подходов, может определяться расположение соответствующих пользователей портативных устройств 20f, 20g, 20h в третьей зоне 195.
Процесс определения расположения(ий) пользователя
Фиг. 5 - схема примерного процесса 500 определения относительных расположений двух или более пользователей в транспортном средстве 25 на основании данных из портативных устройств 20, связанных с пользователями транспортного средства. Процесс 500 начинается на этапе 505.
На этапе 505 компьютер 100 принимает данные транспортного средства 25 с датчиков и контроллеров 115, 120, 125, 130, 135, и т.д. транспортного средства. Данные транспортного средства, например, могут включать в себя скорость транспортного средства 25, угол поворота управляемых колес транспортного средства 25, ускорение транспортного средства 25, угловое смещение колес транспортного средств 25, и т.д. По приему данных транспортного средства 25, процесс 500 продолжается на этапе 510.
На этапе 510 компьютер 100 определяет, является ли событие поворачивания продолжающимся в текущий момент. Например, событие поворачивания могло бы быть определено в качестве транспортного средства, поворачивающего на больший угол, чем или равный десяти (10º) градусам, в течение предопределенного периода времени, например, одной секунды. Дополнительно, компьютер 100 может определять, что событие поворачивания должно включать в себя повороты, которые происходят на скорости, большей, чем предопределенная скорость, например, 20 миль в час. Компьютер 100 дополнительно может определять период времени, соответствующий событию поворачивания. Период времени, например, может быть определен в качестве трех секунд, сопровождающих идентифицированное время начала. Период времени может использоваться, как описано ниже, для определения периода времени, в течение которого должны измеряться данные о движении с носимых устройств 20. Если компьютер 100 определяет, на основании данных транспортного средства 25, что событие поворачивания не является продолжающимся в текущий момент, процесс 500 продолжается на этапе 505. Если компьютер 100 определяет, что событие поворачивания продолжается в текущий момент, процесс 500 продолжается на этапе 515.
На этапе 515 компьютер 100 принимает данные о движении из первого и второго портативных устройств 20a, 20b. Например, компьютер 100, по идентификации, что событие поворачивания продолжается в текущий момент, может отправлять запрос на первое и второе портативные устройства 20a, 20b на данные о движении, характеризующие движение соответствующих первого и второго портативных устройств 20a, 20b в течение периода времени. Первое и второе портативные устройства 20a, 20b каждое может передавать соответствующие данные о движении в компьютер 100. Процесс 500 продолжается на этапе 520.
На этапе 520 компьютер 100 сравнивает данные о движении из первого портативного устройства 20a с данными о движении из второго портативного устройства 20b. Например, компьютер 100 может, как описано выше. Определять ускорение для каждого из соответствующих первого и второго портативных устройств 20a, 20b и сравнивать соответствующие ускорения. Процесс 500 продолжается на этапе 525.
На этапе 525 компьютер может определять расположение первого пользователя, связанного с первым портативным устройством 20a, относительно второго пользователя, связанного с вторым портативным устройством 20b. Как правило, как описано выше, портативное устройство 20, которое испытывает большее ускорение, и связанный с ним пользователь будут расположены радиально снаружи от портативного устройства 20, которое испытывает меньшее ускорение, и связанный с ним пользователь. Например, на основании сравнения, выполненного на этапе 520, компьютер 100 может определять, что ускорение второго портативного устройства 20b в течение периода времени было большим, чем ускорение первого портативного устройства 20a. На основании более высокого значения ускорения в течение периода времени для второго портативного устройства 20b, компьютер 100 может определять, как описано выше, что второе портативное устройство 20b расположено радиально снаружи от первого портативного устройства 20a, во время события поворачивания. Например, в случае, если компьютер 100 знает, что каждое из первого и второго портативных устройств 20a, 20b расположены в первой зоне 185 транспортного средства 25, компьютер 100 дополнительно может определять, что пользователь первого портативного устройства 20a находится на водительском сиденье, а пользователь второго портативного устройства 20b находится на пассажирском сиденье. После выдачи наиболее подходящего определения расположения первого и второго пользователей процесс 500 заканчивается.
Для того чтобы минимизировать использование мощности аккумуляторной батареи у портативного устройства 20, компьютер 100 или транспортное средство 25 могут принимать решение запрашивать только данные портативного устройства 20 в определенных условиях, таких как время после последнего запроса, скорость или другие критерии. Необходимо выполнять процедуру по фиг. 5 на каждом повороте.
ЗАКЛЮЧЕНИЕ
Каждое из вычислительных устройств, обсуждаемых в материалах настоящего документа, как правило, включает в себя инструкции, исполняемые одним или более вычислительными устройствами, такими как идентифицированные выше, для выполнения этапов процессов, описанных выше. Например, этапы процессов, которые были обсуждены выше, могут быть воплощены в качестве машиноисполняемых инструкций.
Машиноисполняемые инструкции могут компилироваться или интерпретироваться из компьютерных программ, созданных с использованием многообразия языков и/или технологий программирования, в том числе, но не в качестве ограничения, и в одиночку или в комбинации, Java™™, C, C++, Visual Basic, Java Script, Perl, HTML, и т.д. Вообще, процессор (например, микропроцессор) принимает инструкции, например, из памяти, машиночитаемого носителя, и т.д., и исполняет эти инструкции, тем самым, выполняя один или более процессов, в том числе, один или более из процессов, описанных в материалах настоящего документа. Такие инструкции и другие данные могут храниться в файлах и передаваться с использованием многообразия машиночитаемых носителей. Файл в вычислительном устройстве, как правило является совокупностью данных, хранимых на машиночитаемом носителе, таком как запоминающий носитель, оперативное запоминающее устройство и т.д.
Машиночитаемый носитель включает в себя любой носитель, который принимает участие в предоставлении данных (например, инструкций), которые могут читаться компьютером. Такой носитель может принимать многие формы, в том числе, но не в качестве ограничения, энергонезависимые носители, энергозависимые носители, и т.д. Энергонезависимые носители, например, включают в себя оптические или магнитные диски и другую постоянную память. Энергозависимые носители включают в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы машиночитаемых носителей, например, включают в себя дискету, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM (постоянное запоминающее устройство (ПЗУ) на компакт-диске), DVD (цифровой многофункциональный диск), любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель со схемой расположения отверстий, ОЗУ (оперативное запоминающее устройство, RAM), ППЗУ (программируемое ПЗУ, PROM), СППЗУ (стираемое программируемое ПЗУ, EPROM), флэш-память/ЭСППЗУ (FLASH-EEPROM (электрически стираемое программируемое ПЗУ)), любые другие микросхему или картридж памяти, или любой другой носитель, с которого компьютер может осуществлять считывание.
Все термины, используемые в формуле изобретения, как подразумевается, представлены в своих принятых и обычных значениях, понятных специалистам в данной области техники, если в материалах настоящего документа в явном виде не указано иное. В частности, использование форм единственного числа, например, «упомянутый» и т.д., должно пониматься как подразумевающее один или более из указанных элементов, если в пункте формулы изобретения в явном виде не указание иное ограничение.
Термин «примерный» в материалах настоящего документа используется в смысле обозначения примера; например, ссылка на «примерное устройство» должна толковаться в качестве просто упоминающей пример устройства.
Наречие «приблизительно», модифицирующее значение или результат, означает, что форма, конструкция, измерение, значение, определение, расчет и т.д., могут отклоняться от точно описанной геометрии, расстояния, измерения, значения, определения, расчета и т.д., вследствие несовершенства материалов, механической обработки, производства, измерений датчиков, вычислений, времен обработки, времени передачи данных и т.д.
На чертежах, одинаковые номера ссылок указывают идентичные элементы. Кроме того, некоторые или все из этих элементов могли бы быть изменены. Что касается носителей, процессов, систем, способов и т.д., описанных в материалах настоящего документа, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны в качестве происходящих согласно определенной упорядоченной последовательности, такие процессы могли бы быть осуществлены на практике с описанными этапами, выполняемыми в порядке, ином, чем порядок, описанный в материалах настоящего документа. Кроме того, должно быть понятно, что некоторые этапы могли бы выполняться одновременно, что могли бы быть добавлены другие этапы, или что некоторые этапы, описанные в материалах настоящего документа, могли бы быть опущены. Другими словами, описания способов в материалах настоящего документа предоставлены с целью иллюстрации некоторых вариантов осуществления и никоим образом не должны толковаться как ограничивающие заявленное изобретение.
Реферат
Группа изобретений относится к компьютеру и способу определения расположения пользователя транспортного средства. Компьютер содержит память и процессор. Память хранит инструкции, исполняемые процессором. Компьютер запрограммирован с возможностью: принимать из первого носимого портативного устройства, связанного с первым пользователем, первые данные о движении, характеризующие движение первого носимого портативного устройства в течение первого периода времени; принимать из второго носимого портативного устройства, связанного со вторым пользователем, вторые данные о движении, характеризующие движение второго носимого устройства в течение первого периода времени; сравнивать соответствующие первые и вторые данные о движении; и определять расположение в транспортном средстве первого пользователя относительно второго пользователя, по меньшей мере, частично на основании сравнения. Достигается определение расположения каждого из пользователей в транспортном средстве с помощью портативных носимых пользователями устройств. 2 н. и 18 з.п. ф-лы, 5 ил.
Комментарии