Шинная система для передачи сообщений - RU2199186C2
Код документа: RU2199186C2
Чертежи






Описание
Уровень техники
Изобретение относится к шинной системе для
передачи сообщений согласно ограничительной части независимого пункта формулы изобретения. Шинная система для передачи сообщений указанного типа, называемая также CAN-шиной (CAN - от англ. Controller
Area Network - представляет собой стандартный протокол ИСО, разработанный для прикладных систем в автомобильной промышленности), уже известна из DE 3506118 С2. CAN-шина обеспечивает первоочередную
передачу имеющих высокий приоритет сообщений. При этом каждому сообщению предшествует так называемый заголовок, определяющий, какое из сообщений при свободной шине будет передано в первую очередь.
Однако в данном случае сообщение нельзя прервать во время его передачи. Кроме того, все сообщения имеют одинаковую амплитуду между двоичными состояниями с высоким и низким уровнями сигнала, т. е.
между высоким и низким состояниями сигнала, каждое из которых соотносится с одним из двух двоичных логических состояний.
Из публикации, IBM Technical Disclosure Bulletin, т. 34, 8, за 1 января 1992 г. , стр. 10-13, известна шинная система, позволяющая прерывать сообщения путем перезаписи двоичных состояний (т. е. их замены другими). При последующем повторном арбитраже сообщениям с более высоким приоритетом предоставляется доступ к шине.
Преимущества изобретения
Преимущество предлагаемых согласно изобретению шинной системы, периферийного устройства и
блока для посылки сообщений с отличительными признаками независимых пунктов формулы изобретения в сравнении с известными состоит в четком отделении друг от друга сообщений с различными приоритетами,
соответственно с различной степенью срочности. Поскольку сообщения с высоким приоритетом в любой момент могут быть переписаны вместо сообщений с низким приоритетом, т. е. просто заменить их, передачу
сообщений с высоким приоритетом можно осуществлять в любой момент, в том числе и при текущей передаче сообщения с низким приоритетом. Кроме того, для сообщений с высоким приоритетом можно использовать
абсолютно иные правила их обработки, т.е. абсолютно иной протокол передачи данных в сравнении с сообщениями с низким приоритетом.
Предпочтительные варианты выполнения представлены в зависимых пунктах формулы изобретения. Путем варьирования длительности двоичных состояний, соответственно длины сообщений в битах, имеющие высокий приоритет сообщения, можно передавать гораздо быстрее имеющих низкий приоритет сообщений. Кроме того, таким образом у имеющих низкий приоритет сообщений можно уменьшить электромагнитные помехи, обусловленные передачей по линиям шины последовательностей двоичных состояний. Для передачи сообщений шина может иметь всего лишь два проводника, соответственно две линии, по которым, помимо этого, можно производить и подачу энергии к периферийным устройствам. Тем самым существенно сокращаются расходы на проводные соединения между блоком управления и периферийными устройствами. Предлагаемую шинную систему наиболее предпочтительно применять в транспортных средствах для обеспечения срабатывания защитных и предохранительных устройств, при этом периферийные устройства можно постоянно диагностировать на предмет их готовности к работе. Ответный сигнал от периферийных устройств наиболее просто формировать замыканием накоротко линий шины.
Чертежи
Ниже изобретение более подробно поясняется на примере нескольких вариантов
его выполнения со ссылкой на прилагаемые чертежи, где показано:
на фиг.1 - общая схема шинной системы,
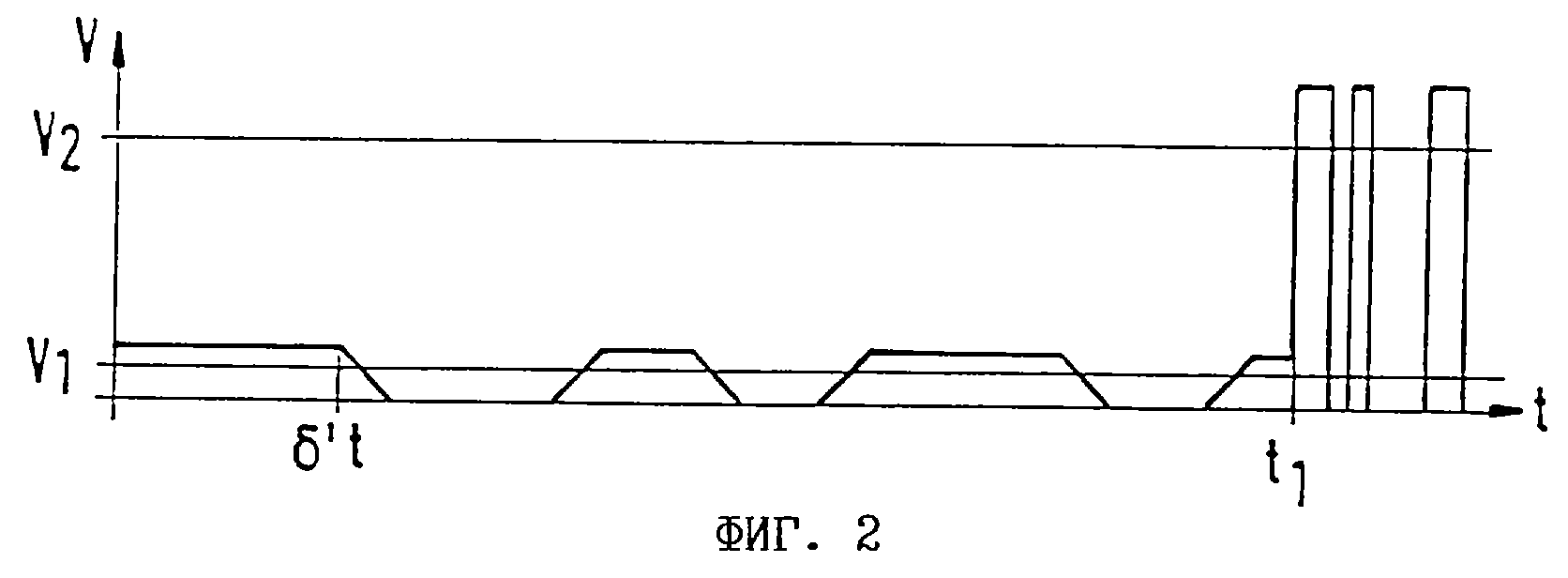
на фиг.2 - диаграмма уровней сигналов в шинной системе,
на фиг.3 и 4
- выделенные из вышеуказанной диаграммы сообщения,
на фиг.5 и 6 - кодирование диагностического запроса, соответственно команды на срабатывание,
на фиг.7 - схема сопряжения
периферийного устройства с шиной,
на фиг.8 - схема блока энергоснабжения периферийного устройства и
на фиг.9 - схема блока разделения сигналов периферийного устройства.
Описание вариантов выполнения
На фиг.1 показан блок 1 управления, соединенный линией 3 шины с высоким уровнем напряжения (Н-линией шины от англ. Bus High) и линией 4 шины с низким уровнем
напряжения (L-линией шины от англ. Bus Low) с несколькими периферийными устройствами 2. Блок 1 управления, ниже называемый также просто блоком, имеет микропроцессор 5 и шинный интерфейс 6. Н-линия 3 и
L-линия 4 соединены с шинным интерфейсом 6. Каждое из периферийных устройств через соответствующий защитный резистор 7 соответственно соединено с Н-линией 3 и L-линией 4.
Обе указанных линии шины - Н-линия 3 и L-линия 4 - вместе образуют двухпроводную шину, по которой может осуществляться обмен сообщениями между блоком 1 управления и периферийными устройствами 2. Поскольку для реализации такой шины необходимы всего две линии, соответственно два проводника, затраты на соединения проводами блока 1 управления с периферийными устройствами 2 сводятся к минимуму. Обмен сообщениями по шине осуществляется за счет того, что одно из передающих устройств выдает на линии 3, 4 шины электрические сигналы как тока, так и напряжения, которые затем обрабатываются приемным устройством. При этом обработка сигналов может осуществляться либо путем сравнения сигналов обеих линий 3, 4 шины, либо путем обработки сигнала только одной из линий. Сами сообщения состоят при этом из последовательности двоичных состояний, каждое из которых может принимать только одно из двух значений: низкое или высокое.
На фиг.2 подобная последовательность двоичных состояний показана в виде диаграммы. Эта последовательность представлена в зависимости от времени t. В последующем описании изобретение рассматривается на примере сигнала напряжения, и поэтому по вертикальной оси отложена величина напряжения V. Вначале двоичная последовательность рассматривается до момента времени t1. Эта двоичная последовательность соответствует одному сигналу напряжения, уровень которого лежит либо выше (двоичное состояние=высокое), либо ниже (двоичное состояние= низкое) уровня опорного напряжения V1. Подобную двоичную последовательность можно сформировать, приложив к линиям 3, 4 шины напряжения соответствующих уровней с последующей оценкой разности между ними, или же к одной из линий можно подвести постоянный потенциал (например, потенциал V1) и варьировать потенциал на другой линии в соответствии с двоичной последовательностью. Амплитуда сигнала напряжения, т.е. разность по напряжению между высоким и низким состояниями выбирается небольшой, иными словами, присутствует лишь одна амплитуда в несколько вольт (обычно в 1 вольт). Кроме того, управление линиями шины осуществляется таким образом, чтобы переходы между высоким и низким двоичными состояниями были не скачкообразными, а имели определенную продолжительность δ′t. Указанная двоичная последовательность с малой амплитудой и относительно продолжительным временем перехода между отдельными двоичными состояниями пригодна лишь для относительно медленной передачи сообщений. Однако подобная передача сообщений обладает определенным преимуществом, состоящим в том, что создаваемые шиной электромагнитные помехи в данном случае являются наиболее незначительными.
Поэтому такую передачу сообщений наиболее целесообразно использовать в том случае, когда сообщения не имеют особой приоритетной срочности. Кроме того, при таком типе передачи сообщений временные интервалы для двоичных состояний, т. е. время, необходимое для идентификации одного отдельного состояния как низкое или высокое, задаются особенно большими.
После момента времени t1 передаваемая по шине двоичная последовательность изменяется. Двоичные состояния имеют большую амплитуду, т.е. они варьируются между нулевым и очень высоким (обычно 10 вольт) значениями сигнала напряжения. Кроме того, импульсы напряжения на участках перехода между отдельными импульсами имеют очень крутые фронты, что приводит к сильным электромагнитным помехам. Большая крутизна фронтов и большая амплитуда сигналов позволяет уменьшить время, необходимое для распознавания двоичного состояния, т.е. тот временной интервал, в течение которого уровень сигнала необходимо удерживать на заданном значении, является коротким. Обработка данной двоичной последовательности осуществляется путем сравнения данного уровня напряжения со вторым его уровнем V2 (обычно 8 вольт), при котором величина напряжения, превышающая уровень напряжения V2, интерпретируется как высокое состояние, а величина напряжения, лежащая ниже этого уровня, интерпретируется как низкое состояние. Подобные сигналы наиболее целесообразно использовать для передачи более срочных, или приоритетных, сообщений, в которых среди прочего за короткий интервал времени необходимо передать большой объем информации.
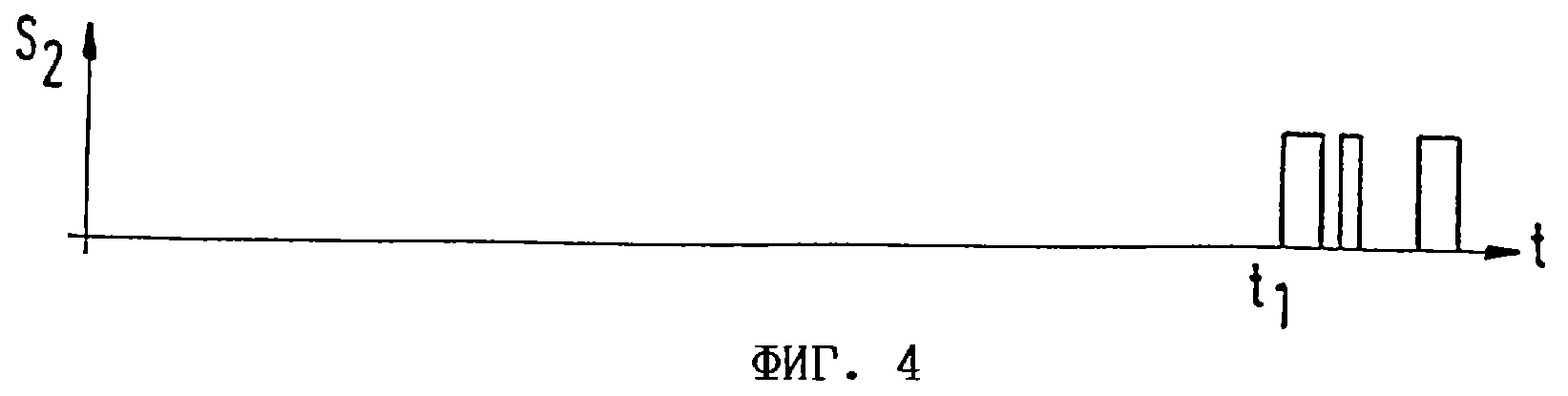
Таким образом, благодаря различной величине амплитуды можно в любой момент отличить сообщения с высоким приоритетом от сообщений с низким приоритетом. Поэтому при посылке сообщения с высоким приоритетом не требуется более ожидать окончания передачи сообщения с низким приоритетом, и начинать отправку более важного сообщения можно в любой момент. С этой целью обработка передаваемых по шине сигналов осуществляется с помощью схем, которые отделяют друг от друга сигналы с различной амплитудой присутствующих на шине двоичных состояний. На фиг.3 и 4 показаны соответственно разделенные сигналы.
На фиг.3 представлен сигнал S1, полученный путем сравнения двоичных состояний на шине с потенциалом V1. При этом до момента t1 речь идет о сообщении, передаваемом с малой амплитудой. Начиная с момента t1, происходит ошибочная обработка сигнала с большой амплитудой. Однако это не имеет значения, поскольку к этому моменту уже началась обработка посланного с большой амплитудой сигнала с высоким приоритетом, что прерывает обработку сигнала с низким приоритетом. Этот сигнал с высоким приоритетом показан на фиг.4. На этом чертеже показано изменение сигнала S2 в зависимости от времени, причем этот сигнал S2 получен путем сравнения двоичного уровня с потенциалом V2. Как видно на диаграмме, до момента t1 сигнал отсутствует. И лишь начиная с момента t1 распознается наличие сигнала. Этот сигнал представляет собой сигнал с высоким приоритетом, что подразумевает его первоочередную обработку.
Под показанной на фиг.1 системой с блоком 1 управления, периферийными устройствами 2 и линиями 3, 4 шины подразумевается в первую очередь система надувной подушки безопасности. Данная система имеет центральный блок 1 управления и периферийные устройства 2, включающие соответственно надувную подушку безопасности, боковую надувную подушку безопасности, натяжитель ремня безопасности или другие элементы. В такого типа системе надувной подушки безопасности команды на срабатывание отдельных периферийных устройств должны передаваться с высоким приоритетом, а какие-либо задержки при этом недопустимы. Кроме того, подобная система должна обеспечивать постоянную проверку исправности отдельных периферийных устройств 2. Поэтому в системе предусмотрена возможность посылки блоком 1 управления диагностических запросов на периферийные устройства 2, которые затем могут подтвердить свою исправность с помощью ответного сигнала. По сравнению с командами на срабатывание периферийных устройств 2 диагностические запросы имеют более низкий приоритет. Таким образом, особые преимущества достигаются при применении предлагаемой в изобретении шинной системы в системе надувной подушки безопасности, в которой между блоком управления и взаимодействующими с ним периферийными устройствами должен происходить постоянный обмен диагностической информацией о готовности к работе этих отдельных периферийных устройств 2 и в которой далее блок 1 управления должен очень быстро передавать на периферийные устройства 2 имеющие высокий приоритет команды на выполнение отдельными периферийными устройствами 2 их функций, таких, как надувание подушки безопасности или срабатывание натяжителя ремня безопасности. Поскольку посылаемые блоком 1 управления сигналы-команды благодаря их большей амплитуде могут в любое время перезаписываться вместо посланных этим же блоком диагностических запросов, т.е. заменять их, эти команды могут без задержки выдаваться на шину при любом промежуточном состоянии передачи диагностического запроса.
Благодаря разделению амплитуд сигналов диагностических запросов и сигналов-команд можно осуществлять абсолютно различную обработку обоих классов этих сообщений. Как уже упоминалось выше, нет необходимости, например, использовать для обоих классов сообщений одинаковую длину в битах, т.е. одинаковую длительность двоичных состояний, а передавать наиболее важные сообщения с более высокой скоростью передачи битов. Кроме того, для обоих различных классов сообщений можно предусмотреть различные протоколы обмена этими сообщениями. Под подобным протоколом подразумевается набор правил или стандартов, регламентирующих обработку отдельных сообщений. Это еще раз наглядно поясняется на фиг. 5 и 6. При этом на фиг.5 поясняется протокол передачи диагностического запроса. На фиг.5 высокое двоичное состояние 100 и низкое двоичное состояние 101 показаны в зависимости от времени. При незанятой шине (состояние незанятости), что соответствует в данном примере высокому состоянию, посылается стартовый бит ST. За ним следуют шесть бит (В0-В5), указывающие адрес периферийного устройства 2. Для контроля правильности передачи этих шести бит используется следующий за ними проверочный бит Р четности. За ним следует стоповый бит Sp, означающий окончание посланного блоком 1 управления диагностического запроса. После этого шина опять переходит в состояние незанятости, т.е. на ней устанавливается высокий двоичный уровень. Затем в ответ на диагностический запрос соответствующее периферийное устройство 2 посылает на блок 1 управления сообщение, несущее информацию о том, готово ли это устройство 2 к работе. В простейшем случае это сообщение состоит в том, что после посылки диагностического запроса при незанятой шине по истечении заданного времени после получения диагностического запроса периферийное устройство, если оно готово к работе, выдает на шину так называемый сигнал исправности, т.е. один единственный бит. Наиболее простым способом сформировать подобный сигнал исправности является способ, при котором получившее запрос периферийное устройство кратковременно закорачивает друг на друга обе линии шины - Н- линию 3 и L-линию 4. Однако возможны и более сложные ответные сигналы, состоящие из двоичной последовательности (последовательности бит).
На фиг.6 показан протокол передачи команды на срабатывание периферийного устройства 2. При незанятой шине (состояние незанятости шины), что соответствует в данном примере высокому состоянию 100, посылается, первый стартовый бит (ST), указывающий на начало сообщения. За ним следует информационное поле (I), длина которого в данном случае равна 10 битам. Однако информационное поле может иметь и любую другую длину. С целью контроля правильности передачи информационного поля после него предусмотрены проверочный бит Р четности и поле контроля циклическим избыточным кодом (CRC-поле от англ. cyclic redundancy check), позволяющим определить правильность передачи всех битов информационного поля I. За CRC-полем следует стоповый бит Sp, после чего шина опять переходит в состояние незанятости. Каждый бит информационного поля I может представлять собой команду на срабатывание одного из периферийных устройств 2. В зависимости от того, на какой уровень установлено двоичное состояние - высокий или низкий, - периферийное устройство 2 инициирует выполнение своей предохранительной функции, например, воспламеняется пироэлектрический заряд для надувания подушки безопасности или срабатывает натяжитель ремня безопасности. Таким образом, с помощью показанного на фиг.6 командного сообщения блок управления может выдавать на периферийные устройства команды, определяющие, какие из них должны или не должны срабатывать. Поскольку на основании одного единственного некорректно переданного бита может быть принято решение о срабатывании или не срабатывании подушки безопасности, предусматривается очень длинное CRC-поле для защиты бит от ошибок при их передаче в информационном поле. Кроме того, можно предусмотреть многократную посылку показанного на фиг.6 сообщения, поскольку при дорожно-транспортном происшествии в любом случае должно происходить срабатывание таких важных для обеспечения безопасности систем, как надувная подушка безопасности.
Таким образом, предлагаемая в изобретении шинная система позволяет пересылать по одним и тем же проводам сообщения, используя абсолютно различные протоколы их обработки. Диагностический запрос, как он описан в примере по фиг. 5, обрабатывается на основании абсолютно иного по своему типу протокола передачи данных, чем команда по фиг.6. Диагностический запрос согласно фиг.5 может, например, передаваться по так называемому V24-протоколу, тогда как команда на срабатывание по фиг.6 может выдаваться согласно CAN-протоколу.
На фиг. 7 показана схема обработки входного сигнала периферийного устройства 2. Периферийное устройство имеет две входных линии 21 и 22, соединенные с линиями шины. Обе линии 21 и 22 соединены с блоком 23 энергоснабжения. Кроме того, одна из входных линий 21 соединена с блоком 24 разделения сигналов. Этот блок разделения сигналов отделяет сигналы с большой амплитудой от сигналов с малой амплитудой, подавая сигналы с большой амплитудой на блок 25 обработки команд, а сигналы с малой амплитудой - на блок 26 обработки диагностических запросов. На вход блока 24 разделения сигналов подается сигнал, как, например, показанный на фиг.2. В результате амплитудного разделения блок разделения сигналов затем выдает на блок 25 обработки команд сигнал, показанный на фиг.4, а на блок 26 обработки диагностических запросов - сигнал, показанный на фиг.3. Такое четкое разделение сигналов позволяет обрабатывать диагностические запросы и команды на срабатывание периферийного устройства отдельно друг от друга.
Блок 25 обработки команд распознает входящие команды для соответствующего периферийного устройства, т.е. он проверяет, предназначены ли поступившие команды для соответствующего блока управления, и на основании проверочного бита четности, соответственно CRC-поля согласно фиг.6, проверяет, действительно ли выдана команда для соответствующего блока управления. Как только такая команда будет распознана, на выходную линию 27 выдается соответствующий выходной сигнал на дальнейшую обработку, с помощью которого, например, включается спусковая схема воспламенения пироэлектрического заряда для надувания подушки безопасности. Блок обработки диагностических запросов проверяет, например, в соответствии с примером по фиг.5, был ли предназначен диагностический запрос для соответствующего блока управления. Затем он определяет исправность периферийного устройства 2, причем выполнение этой же задачи может брать на себя и еще одна схема, в целях упрощения не показанная на фиг. 7. Затем результат диагностирования выдается на выходную линию 28 и тем самым подводится обратно к блоку 1 управления. На фиг.7 показана простейшая схема передачи сигналов подтверждения, в которой сигнал на выходной линии 28 может замыкать выключатель 29, закорачивающий друг на друга обе входных линии 21 и 22. Данное замыкание накоротко обеих линий 21, 22 приводит через защитные резисторы 7 к уравниванию потенциалов на линиях 3, 4 шины, что может регистрироваться блоком 1 управления.
На фиг. 8 более детально показана структура блока 23 энергоснабжения.
Этот блок энергоснабжения состоит в данном примере из выпрямителя 31 и сглаживающего конденсатора 32, при этом выпрямитель 31 входными линиями 21, 22 через резисторы 7 соединен с линиями 3, 4 шины. Таким образом, по линиям 3, 4 шины передается не только информация для управления или диагностики периферийных устройств 2, но и подводится необходимая для работы этих устройств энергия. Схема выпрямителя 31 делает энергоснабжение независимым от полярности линий 3, 4 шины. Кроме того, в блоке 23 энергоснабжения предусмотрен не показанный на данной схеме источник электропитания с целью исключить внесение помех в динамические сигналы на линиях 3, 4 шины. При переключении линий 3, 4 соответственно с потенциала корпуса (низкий уровень) на находящийся под напряжением потенциал (высокий уровень) и в обратном направлении в целях бесперебойного электропитания необходимо обеспечить, чтобы в каждом случае по меньшей мере одна из двух линий 3, 4 шины была подключена к высокому уровню напряжения. Это означает, что если на одну из шин подается высокий уровень напряжения, к другой шине должно быть приложено напряжение низкого уровня или наоборот, чтобы по крайней мере на одной из двух линий 3, 4 шины уровень напряжения по отношению к потенциалу корпуса, приложенного к узловой точке 42 цепи, был равен уровню оконечного напряжения. К узловой точке 41 выпрямителя 31 в этом случае приложено напряжение питания периферийного устройства 2. Проходящие по шине сигналы могут сниматься как в узловой точке 51 линии 21, так и в узловой точке 52 линии 22. Если осуществляющие обработку сигналов части схемы, такие как, например, блок 24 разделения сигналов, блок 25 обработки команд или блок 26 обработки диагностических запросов, оценивают двоичные состояния по определенной их полярности, то перепутывание полярности линий 3 или 4 может привести к выдаче сигналов с неправильной полярностью. Этого можно избежать, если сначала определить полярность линий 3, 4 с помощью периферийного устройства 2, а затем снимать сигнал по выбору в узловых точках 51 или 52, т.е. по выбору либо с линии 3, либо с линии 4. В показанном на фиг.7 случае съем сигнала производится в узловой точке 51 на входной линии 21.
На фиг. 9 поясняется структура блока 24 разделения сигналов. Этот блок разделения сигналов включает два компаратора 61 и 62, неинвертирующие входы которых соответственно соединены с узловой точкой 51. Инвертирующие входы компараторов 61 и 62 соединены с узловыми точками 63 и 64 приложения напряжения, потенциал которых определяется делителем напряжения с тремя резисторами 71, 72 и 73. Делитель напряжения включен между источником напряжения питания VCC и корпусом. Делитель напряжения выполнен таким образом, что к узловой точке 63 приложено описанное в примере по фиг.2 опорное напряжение V2, а к узловой точке 64 - также описанное в примере по фиг.2 опорное напряжение V1. Таким образом, выходной сигнал компаратора 61 представляет собой сигнал по фиг.4, а выходной сигнал компаратора 62 является сигналом по фиг.3. Показанная на фиг.9 схема позволяет наиболее простыми средствами обеспечить разделение сигналов с различной амплитудой.
Реферат
Изобретение относится к шинным системам. Технический результат заключается в четком отделении друг от друга сообщений с различными приоритетами, соответственно с различной степенью срочности. Устройство содержит блок управления, линии шины и по меньшей мере одно периферийное устройство, причем блок управления выполнен с возможностью посылки по меньшей мере на одно периферийное устройство сообщений с высоким приоритетом и сообщений с низким приоритетом с помощью последовательности двоичных состояний с высоким или низким уровнем сигнала, при этом амплитуда сигнала между высоким и низким уровнями двоичных состояний у сообщений с высоким приоритетом больше, чем у сообщений с низким приоритетом. 3 с. и 15 з.п. ф-лы, 9 ил.

Комментарии