Способ определения местоположения телефона как ключа на основе обнаружения объекта, соответствующие транспортное средство и машиночитаемый носитель - RU2704769C2
Код документа: RU2704769C2
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение, в общем, относится к подсистемам дистанционного управления для транспортного средства и, более конкретно, к определению местоположения телефона как ключа на основе обнаружения объекта.
УРОВЕНЬ ТЕХНИКИ
[0002] Технология "телефон как ключ" (PAAK) обеспечивает доступ к функциям, традиционно ассоциируемым с брелоком, через приложение, выполняющееся на смартфоне. Смартфон, выполняющий PAAK-приложение, осуществляет связь с транспортными средствами через беспроводную сеть. Однако, транспортные средства, такие как легковые и грузовые автомобили, зачастую припаркованы в зонах с плохими электромагнитными характеристиками, которые блокируют или ухудшают связь между телефоном и транспортным средством. Дополнительно, другие устройства, которые совместно используют частотный диапазон поблизости от транспортного средства, могут вызывать помехи. Как плохие электромагнитные характеристики, так и помехи в частотном диапазоне, могут сокращать рабочий диапазон PAAK-функциональных средств.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Прилагаемая формула изобретения определяет объем этой заявки. Настоящее раскрытие обобщает аспекты вариантов осуществления и не должно использоваться для того, чтобы ограничивать формулу изобретения. Предполагаются другие реализации в соответствии с технологиями, описанными в данном документе, как будет очевидно обычному специалисту в области техники после изучения последующих чертежей и подробного описания, и такие реализации подразумеваются находящимися в рамках этой заявки.
[0004] Примерные варианты осуществления раскрываются для определения местоположения телефона как ключа на основе обнаружения объекта. Примерное раскрытое транспортное средство включает в себя датчики, беспроводные узлы и блок ключа в виде телефона. Примерные датчики обнаруживают объекты около транспортного средства. Примерные беспроводные узлы принимают RSSI-значения от мобильного устройства. Примерный блок ключа в виде телефона определяет количество объектов около транспортного средства. Примерный блок ключа в виде телефона также определяет первое пороговое значение RSSI на основе количества. Дополнительно, в ответ на среднее значение для фрагмента RSSI-значений, удовлетворяющее первому пороговому значению RSSI, блок ключа в виде телефона подготавливает дверь транспортного средства.
[0005] Примерный раскрытый способ включает в себя обнаружение, с помощью датчиков обнаружения диапазона, объектов около транспортного средства. Примерный способ также включает в себя прием, от множества беспроводных узлов, RSSI-значений от мобильного устройства. Примерный способ включает в себя определение количества объектов около транспортного средства. Дополнительно, примерный способ включает в себя определение первого порогового значения RSSI на основе количества и в ответ на среднее значение для фрагмента RSSI-значений, удовлетворяющее первому пороговому значению RSSI, подготовку двери транспортного средства.
[0006] Примерный раскрытый материальный машиночитаемый носитель включает в себя инструкции, которые, когда исполняются, инструктируют примерному транспортному средству (a) обнаруживать, с помощью датчиков обнаружения диапазона, объекты около транспортного средства, (b) принимать, от множества беспроводных узлов, RSSI-значения от мобильного устройства, (c) определять количество объектов около транспортного средства, (d) определять первое пороговое значение RSSI на основе количества и (e) в ответ на среднее значение для фрагмента RSSI-значений, удовлетворяющее первому пороговому значению RSSI, подготавливать дверь транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Для лучшего понимания изобретения можно обратиться к вариантам осуществления, показанным на следующих чертежах. Компоненты на чертежах необязательно начерчены в масштабе, и связанные элементы могут быть опущены, или в некоторых случаях пропорции могут быть преувеличены, с тем, чтобы подчеркивать и ясно иллюстрировать новые признаки, описанные в данном документе. Помимо этого, системные компоненты могут компоноваться различными способами, как известно в данной области техники. Дополнительно, на чертежах, аналогичные ссылочные позиции обозначают соответствующие части на нескольких видах.
[0008] Фиг. 1 иллюстрирует транспортное средство, работающее в соответствии с учениями этого изобретения.
[0009] Фиг. 2A и 2B иллюстрируют зоны обнаружения около транспортного средства на фиг. 1.
[0010] Фиг. 3 - это блок-схема электронных компонентов транспортного средства на фиг. 1.
[0011] Фиг. 4 - это блок-схема последовательности операций способа для определения местоположения мобильного устройства на основе обнаружения объекта, который может быть реализован посредством электронных компонентов согласно фиг. 3.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0012] В то время как изобретение может быть осуществлено в различных формах, на чертежах показаны и будут далее описаны в данном документе некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее изобретение должно рассматриваться как иллюстрация изобретения и не предназначено для ограничения изобретения конкретными иллюстрированными вариантами осуществления.
[0013] Все в большей степени системы пассивного доступа и пассивного запуска (PEPS) включаются в транспортные средства. PEPS-системы облегчают потребителям доступ и вождение их транспортных средств без взаимодействия с брелоком. Эти PEPS-системы используют сочетание низкочастотной (LF) (например, 125 кГц) и сверхвысокочастотной (UHF) (например, 310 МГц, 315 МГц и т.д.) связи, чтобы обнаруживать и определять местоположение брелоков. Антенны в транспортном средстве передают LF-сигналы брелоку. Брелок отправляет информацию об уровне принимаемого сигнала (RSSI) для этих сигналов обратно транспортному средству через UHF-связь. Транспортное средство определяет местоположение брелока на основе предварительно определенной таблицы значений соотношения RSSI к расстоянию. PEPS-система задает пороговые значения для пассивного доступа и пассивного запуска, чтобы активировать соответствующие функции, когда мобильное устройство находится в диапазоне порогового значения.
[0014] Система "телефон как ключ" (PaaK) использует персональные сети (например, Bluetooth® Low Energy (BLE) и т.д.), чтобы обнаруживать и определять местоположение мобильных телефонов. В целом, сетевой контроллер для связи через персональные сети является стандартным функциональным средством на мобильных устройствах. Таким образом, PaaK-система может быть развернута на мобильных устройствах без необходимости в специализированной антенне и контроллерах, чтобы связываться через другие частоты (например, 125 кГц, 315 МГц и т.д.). Аналогично PEPS-системе на основе брелока PaaK-система включает в себя функциональные средства пассивного доступа, пассивного запуска и приветственной подсветки. Однако, так как персональные сети используют относительно высокую частоту (например, диапазон 2,4 ГГц), сигналы от PaaK-системы имеют больший шанс отражения и ослабления объектами или людьми в и около транспортного средства по сравнению с низкочастотным излучением (например, 125 кГц) системы на основе брелока. Вследствие большего шанса отражения и ослабления в частотных диапазонах, используемых персональными сетями, трудно точно определять местоположение мобильного телефона при использовании предварительно определенных значений расстояний для RSSI. Следовательно, вследствие технических проблем, имеющих корни в использовании персональных сетей, установка надежных пороговых значений для пассивного доступа и режима приветствия является трудной.
[0015] Как раскрывается ниже, точность определения местоположения мобильного устройства в PaaK-системе с помощью персональной сети улучшается посредством принятия во внимание объектов поблизости от транспортного средства. Точность пороговых значений для зон пассивного доступа и режима приветствия увеличивается, когда пороговые значения RSSI для этих зон регулируются согласно транспортному средству. PaaK-блок на транспортном средстве соединен с возможностью связи с датчиками обнаружения диапазона (например, ультразвуковыми датчиками, камерой(ами), радиолокационным датчиком и/или лидаром и т.д.) и/или системой связи между транспортными средствами (например, выделенной связи ближнего действия (DSRC) и т.д.). Датчики обнаружения диапазона обнаруживают объекты (например, стены, столбы, другие транспортные средства и т.д.). Система связи между транспортными средствами связывается с другими транспортными средствами, чтобы обнаруживать эти транспортные средства поблизости.
[0016] Когда PaaK-блок первоначально обнаруживает мобильное устройство, он активирует датчики обнаружения диапазона и/или систему связи между транспортными средствами, чтобы обнаруживать объекты поблизости от транспортного средства. PaaK-блок распределяет по категориям плотность объектов поблизости от транспортного средства. В некоторых примерах PaaK-блок распределяет плотность объектов в три категории. В первой категории (например, категория "высокой плотности") PaaK-блок обнаруживает множество больших объектов около транспортного средства. Во второй категории (например, категория "средней плотности") PaaK-блок обнаруживает несколько объектов около транспортного средства. В третьей категории (например, категория "низкой плотности") PaaK-блок не обнаруживает объекты около транспортного средства. PaaK-блок регулирует пороговые значения RSSI для зон пассивного доступа и режима приветствия на основе обнаруженной категории.
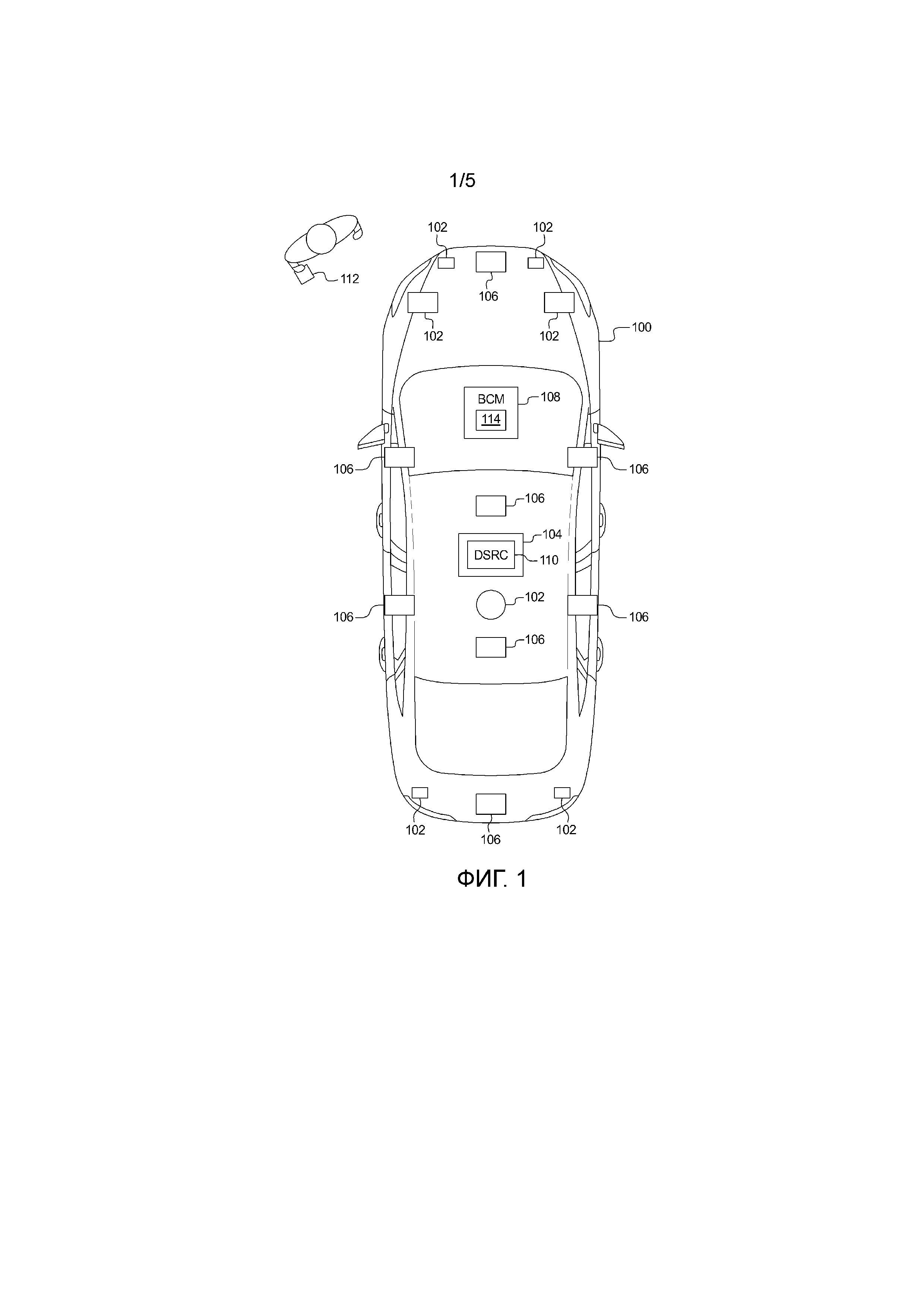
[0017] Фиг. 1 иллюстрирует транспортное средство 100, работающее в соответствии с учениями этого изобретения. Транспортное средство 100 может быть обычным транспортным средством с бензиновым двигателем, гибридным транспортным средством, электрическим транспортным средством, транспортным средством на топливных элементах и/или любым другим типом реализации мобильности транспортного средства. Транспортное средство 100 включает в себя части, связанные с мобильностью, такие как силовая цепь с двигателем, коробка передач, подвеска, приводной вал и/или колеса и т.д. Транспортное средство 100 может быть неавтономным, полуавтономным (например, некоторые рутинные движущие функции управляются посредством транспортного средства 100) или автономным (например, движущие функции управляются посредством транспортного средства 100 без непосредственного входного воздействия водителя). В иллюстрированном примере транспортное средство 100 включает в себя датчики 102, бортовую платформу 104 связи, беспроводные узлы 106 и модуль 108 управления кузовом.
[0018] Датчики могут быть размещены в и повсюду в транспортном средстве 100 любым подходящим образом. Датчики могут быть установлены внутри салона транспортного средства 100 или в кузове транспортного средства 100 (например, в отсеке двигателя, колесных нишах и т.д.), чтобы измерять свойства в салоне транспортного средства 100. Например, такие датчики могут включать в себя акселерометры, одометры, тахометры, датчики поворота относительно поперечной и вертикальной оси, датчики скорости колес, микрофоны, датчики давления в шинах и биометрические датчики, и т.д. В иллюстрированном примере датчики включают в себя один или более датчиков 102 обнаружения диапазона, установленных, чтобы измерять свойства вокруг внешней стороны транспортного средства 100. Датчики 102 обнаружения диапазона устанавливаются на транспортное средство 100, чтобы обнаруживать объекты (например, людей, транспортные средства, стены и т.д.) поблизости от транспортного средства 100. Датчики 102 обнаружения диапазона могут включать в себя ультразвуковые датчики, радиолокационный датчик, лидар, камеры и/или инфракрасные датчики и т.д. Датчики 102 обнаружения диапазона обнаруживают расстояние и/или относительный размер объектов от транспортного средства 100.
[0019] Бортовая платформа 104 связи включает в себя беспроводные сетевые интерфейсы, чтобы предоставлять возможность связи с внешними сетями. Бортовая платформа 104 связи также включает в себя аппаратные средства (например, процессоры, память, устройство хранения, антенну и т.д.) и программное обеспечение, чтобы управлять проводными или беспроводными сетевыми интерфейсами. В некоторых примерах бортовая платформа 104 связи включает в себя сотовую модель (например, включающую в себя такие протоколы как глобальная система мобильной связи (GSM), универсальная система мобильной коммутации (UMTS), проект "долгосрочное развитие" (LTE), множественный доступ с кодовым разделением канала (CDMA) и т.д.) и/или модуль беспроводной локальной вычислительной сети (включающий в себя IEEE 802.11 a/b/g/n/ac или другие). В иллюстрированном примере бортовая платформа 104 связи включает в себя модуль 110 выделенной связи ближнего действия (DSRC), чтобы обнаруживать другие транспортные средства поблизости от транспортного средства 100. Примерный DSRC-модуль 110 включает в себя антенну(ы), радиоприемник(и) и программное обеспечение, чтобы рассылать сообщения и устанавливать связь между транспортным средством 100 и другими транспортными средствами поблизости, также оборудованными DSRC-модулем, инфраструктурными модулями (не показаны) и модулями на основе мобильного устройства (не показаны). Больше информации о DSRC-сети и том, как сеть может связываться с аппаратными средствами и программным обеспечением транспортного средства, доступно в отчете по спецификации системных требований центра министерства транспорта США за июнь 2011 года (доступный по ссылке (http://www.its.dot.gov/meetings/pdf/CoreSystem_SE_SyRS_RevA%20(2011-06-13).pdf), которая, таким образом, включена по ссылке в своей полноте вместе со всеми документами, упомянутыми на страницах 11-14 отчета SyRS. DSRC-системы, объединяющие информацию инфраструктуры, известны как "придорожная" система. DSRC может быть объединена с другими технологиями, такими как система глобального позиционирования (GPS), передача данных видимым светом (VLC), сотовая связь и радиолокационная станция малого радиуса действия, обеспечивающими сообщение транспортным средством его положения, скорости, направления движения, относительного положения по отношению к другим объектам и обмен информацией с другими транспортными средствами или внешними компьютерными системами.
[0020] В настоящее время DSRC-сеть идентифицируется под аббревиатурой или названием DSRC. Однако, иногда используются другие названия, обычно относящиеся к программе соединенных транспортных средств или т.п. Большинство из этих систем являются либо чисто DSRC, либо разновидностью стандарта беспроводной связи IEEE 802.11. Однако, помимо чистой DSRC-системы, он также предназначен, чтобы охватывать специализированные системы беспроводной связи между автомобилями и системой придорожной инфраструктуры, которые объединены с GPS и основываются на протоколе IEEE 802.11 для беспроводных локальных вычислительных сетей (таких как 802.11p и т.д.).
[0021] В иллюстрированном примере беспроводные узлы 106 располагаются повсюду в транспортном средстве 100. Например, беспроводные узлы 106 могут быть установлены рядом с передней дверью водительской стороны, задней дверью водительской стороны, передней дверью пассажирской стороны, задней дверью пассажирской стороны, в передней части транспортного средства 100 и/или в задней части транспортного средства 100. Дополнительно, транспортное средство 100 включает в себя один из беспроводных узлов 106 внутри транспортного средства 100, чтобы обеспечивать определение того, находится ли мобильное устройство 112 внутри или снаружи транспортного средства 100. Когда активированы, беспроводные узлы 106 устанавливают соединения с мобильным устройством(ами) 112, которые были спарены с беспроводными узлами 106. Мобильное устройство(а) 112 могут быть спарены с беспроводными узлами 106 во время процесса настройки через головное устройство информационно-развлекательной системы. Примерные беспроводные узлы 106 реализуют протокол Bluetooth Low Energy (BLE). Протокол BLE изложен в Томе 6 спецификации Bluetooth 4.0 (и последующих версиях), поддерживаемой специальной группой по вопросам Bluetooth.
[0022] Сообщения, которыми обмениваются между собой мобильное устройство(а) 112 и беспроводные узлы 106, включают в себя значения RSSI и/или RX между мобильным устройством(ами) 118 и беспроводными узлами 106. Значения RSSI и RX измеряют уровень сигнала открытого тракта для радиочастотного сигнала, который принимается мобильным устройством 112 (например, смартфоном, интеллектуальными часами и т.д.) от соответствующего беспроводного узла 106. RSSI измеряется в процентах уровня сигнала, значения (например, 0-100, 0-137 и т.д.) которого определяются производителем аппаратных средств, используемых, чтобы реализовывать беспроводные узлы 106. Как правило, более высокий RSSI означает, что мобильное устройство 112 находится ближе к соответствующим беспроводным узлам 106. RX-значения измеряются в децибел-милливатах (дБм). Например, когда мобильное устройство 112 находится в одном метре (3,28 фута), RX-значение может составлять -60 дБм, а когда мобильное устройство находится в двух метрах (6,56 фута), RX-значение может составлять -66 дБм. RSSI/RX-значения используются, чтобы определять радиальное расстояние от мобильного устройства 112 до конкретных беспроводных узлов 106. В некоторых примерах, с помощью трилатерации, беспроводные узлы 106 используются, чтобы определять местоположение(я) мобильного устройства(ств) 112 относительно транспортного средства 100.
[0023] Модуль 108 управления кузовом управляет различными подсистемами транспортного средства 100. Например, модуль 108 управления кузовом может управлять окнами с электроприводом и замками с электроприводом (например, через блок управления дверью и т.д.), системой иммобилайзера и/или зеркалами с электроприводом, и т.д. Модуль 108 управления кузовом включает в себя схемы, чтобы, например, приводить в действие реле (например, управлять жидкостью стеклоочистителя и т.д.), приводить в действие щеточные моторы постоянного тока (DC) (например, чтобы управлять сиденьями с электроприводом, замками с электроприводом, окнами с электроприводом, стеклоочистителями и т.д.), приводить в действие шаговые электромоторы и/или возбуждать множество LED и т.д. В иллюстрированном примере модуль 108 управления кузовом включает в себя блок 114 телефона как ключа (PaaK) (иногда называемый в данном документе блоком "ключа-телефона").
[0024] PaaK-блок 114 связывается с мобильным устройством 112, чтобы обеспечивать PaaK-приложению, выполняющемуся на мобильном устройстве 112, управляющие функции для транспортного средства 100, как если бы мобильное устройство 112 было брелоком. Время от времени, Paak-блок 114, через беспроводные узлы 106, отправляет широковещательный сигнал (иногда называемый "опросом"), чтобы определять, существуют ли и/или обнаруживать ли присутствие каких-либо спаренных мобильных устройств 112 поблизости от транспортного средства 100. В ответ на прием опрашивающего широковещательного сигнала мобильное устройство 112 транслирует ответы каждому из беспроводных узлов 106, которые включают в себя RSSI, с которым опрашивающий широковещательный сигнал был принят от соответствующих беспроводных узлов 106. Например, если транспортное средство 100 включает в себя шесть беспроводных узлов 106, мобильное устройство 112 может транслировать шесть ответов, каждый с идентификатором и RSSI одного из беспроводных узлов 106. Посредством обмена токенами аутентификации PaaK-блок 114 соединяется с возможностью связи с мобильным устройством 112 через один из беспроводных узлов 106.
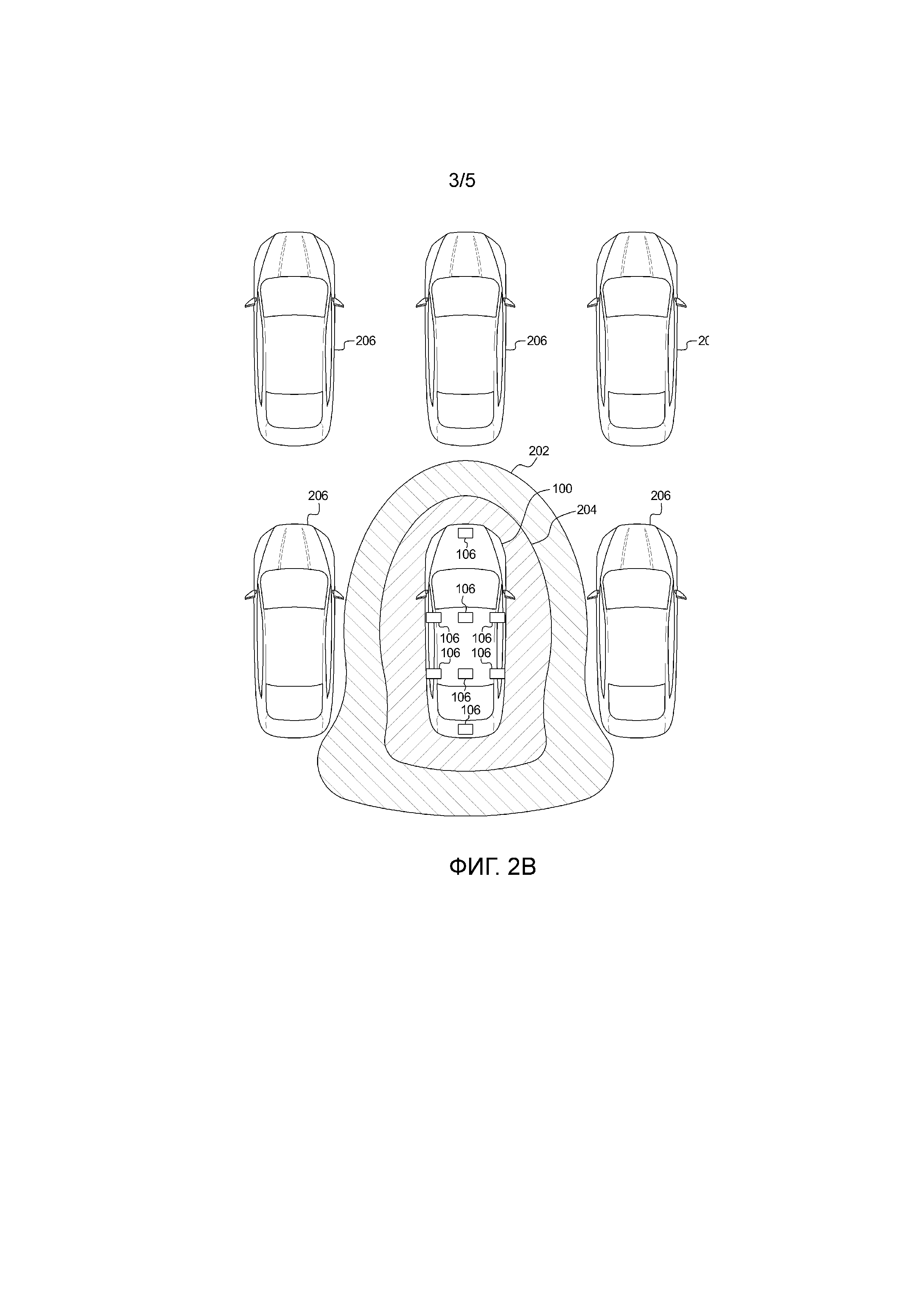
[0025] Как иллюстрировано на фиг. 2A и 2B, PaaK-блок 114 использует первое пороговое значение 202 RSSI и второе пороговое значение 204 RSSI, чтобы определять зоны вокруг транспортного средства 100. Первое пороговое значение 202 RSSI определяет "зону приветствия". Когда мобильное устройство 112 находится в зоне приветствия, модуль 108 управления кузовом включает приветственные фонари (например, внутренние и/или внешние фонари) и/или индивидуально настраивает предпочтения в салоне транспортного средства. Второе пороговое значение 204 RSSI определяет "зону пассивного доступа". Когда мобильное устройство 112 находится в зоне пассивного доступа, модуль 108 управления кузовом подготавливает одну или более дверей, чтобы разблокировать их. В контексте настоящего документа термин "подготовка" относится к отправке сигнала блоку управления двери, чтобы авторизовать разблокировку двери в ответ на обнаружение руки на ручке двери.
[0026] RSSI-значения для первого порогового значения 202 RSSI и второго порогового значения 204 RSSI зависят от плотности объектов поблизости от транспортного средства 100. В ответ на первоначальное обнаружение мобильного устройства 112, PaaK-блок 114 активирует датчики 102 обнаружения диапазона и/или DSRC-модуль 110, чтобы обнаруживать объекты 206 (например, другие транспортные средства, структурные элементы и т.д.) поблизости (например, пять футов, десять футов и т.д.) от транспортного средства. PaaK-блок 114 распределяет плотность объектов по категориям. В некоторых примерах PaaK-блок 114 распределяет плотность объектов в три категории. В первой категории (например, категории "высокой плотности") PaaK-блок 114 обнаруживает количество объектов поблизости от транспортного средства 100, которое удовлетворяет (например, больше) первому пороговому значению плотности. Например, первое пороговое значение плотности может быть равно шести объектам 206. В первой категории первое пороговое значение 202 RSSI и второе пороговое значение 204 RSSI являются относительно небольшими. Например, первое пороговое значение 202 RSSI и второе пороговое значение 204 RSSI могут составлять 60,0 дБм и -68,5 дБм, соответственно. Во второй категории (например, категории "средней плотности") PaaK-блок 114 обнаруживает количество объектов поблизости от транспортного средства 100, которое удовлетворяет (например, больше) второму пороговому значению плотности, но не удовлетворяет первому пороговому значению плотности. Например, второе пороговое значение плотности может быть равно трем объектам 206. Во второй категории первое пороговое значение 202 RSSI и второе пороговое значение 204 RSSI больше, чем в первой категории. Например, первое пороговое значение 202 RSSI и второе пороговое значение 204 RSSI могут составлять 56,3 дБм и -66,2 дБм, соответственно. В третьей категории (например, категории "низкой плотности") PaaK-блок 114 обнаруживает количество объектов поблизости от транспортного средства 100, которые не удовлетворяют второму пороговому значению плотности. В третьей категории первое пороговое значение 202 RSSI и второе пороговое значение 204 RSSI больше, чем в первой и второй категориях. Например, первое пороговое значение 202 RSSI и второе пороговое значение 204 RSSI могут составлять 53,9 дБм и -64,7 дБм, соответственно.
[0027] Чтобы определять, находится ли мобильное устройство 112 в пределах первого порогового значения 202 RSSI или второго порогового значения 204 RSSI, PaaK-блок 114 выбирает поднабор RSSI-значений в ответах от мобильного устройства 112, отправленных в ответ на одинаковый опрашивающий широковещательный сигнал. В некоторых примерах PaaK-блок 114 выбирает два наивысших RSSI-значения. PaaK-блок 114 усредняет выбранные RSSI-значения и сравнивает среднее значение с первым пороговым значением 202 RSSI и вторым пороговым значением 204 RSSI, чтобы определять, находится ли мобильное устройство 112 в зоне приветствия или зоне пассивного доступа. Например, если RSSI-значения от мобильного устройства 112 составляют [-60,2 дБм, -61,0 дБм, -63,8 дБм, -63,5 дБм, -59,8 дБм, -61,7 дБм], среднее значение из двух наибольших значений будет 60,0 дБм. В таком примере PaaK-блок 114 сравнивает -60,0 дБм с первым пороговым значением 202 RSSI и вторым пороговым значением 204 RSSI.
[0028] Фиг. 3 - это блок-схема электронных компонентов 300 транспортного средства 100 на фиг. 1. В иллюстрированном примере электронные компоненты 300 включают в себя датчики 102, бортовую платформу 104 связи, беспроводные узлы 106, модуль 108 управления кузовом, блоки 302 управления дверьми и информационную шину 304 транспортного средства.
[0029] Модуль 108 управления кузовом включает в себя процессор или контроллер 306 и память 308. В иллюстрированном примере модуль 108 управления кузовом структурируется, чтобы включать в себя PaaK-блок 114. Процессор или контроллер 306 может быть любым подходящим устройством обработки или набором устройств обработки, таких как, но не только: микропроцессор, платформа на базе микроконтроллера, подходящая интегральная схема, одна или более программируемых пользователем вентильных матриц (FPGA) и/или одна или более специализированных интегральных схем (ASIC). Память 308 может быть энергозависимой памятью (например, RAM, которое может включать в себя энергонезависимое RAM, магнитное RAM, ферроэлектрическое RAM и любые другие подходящие формы); энергонезависимую память (например, дисковую память, флэш-память, множество EPROM, EEPROM, мемристорную энергонезависимую твердотельную память и т.д.), не допускающую изменений память (например, множество EPROM), постоянное запоминающее устройство и/или запоминающие устройства большой емкости (например, накопители на жестких дисках, твердотельные накопители и т.д.). В некоторых примерах, запоминающее устройство 308 включает в себя несколько видов запоминающего устройства, в частности, энергозависимое запоминающее устройство и энергонезависимое запоминающее устройство.
[0030] Память 308 представляет собой машиночитаемые носители, в которые могут быть включены один или более наборов инструкций, к примеру, программное обеспечение для осуществления способов настоящего раскрытия. Инструкции могут осуществлять один или более способов или логику, как описано в данном документе. В конкретном варианте осуществления инструкции могут находиться полностью, или, по меньшей мере частично, в любом одном или более из памяти 308, машиночитаемого носителя и/или в процессоре 306 во время исполнения инструкций.
[0031] Следует понимать, что термины "энергонезависимый машиночитаемый носитель" и "машиночитаемый носитель" включают в себя один носитель или множество носителей, к примеру, централизованную или распределенную базу данных и/или ассоциированные кэши и серверы, которые сохраняют один или более наборов инструкций. Термины "энергонезависимый машиночитаемый носитель" и "машиночитаемый носитель" также включают в себя любой материальный носитель, который способен хранить, кодировать или нести набор инструкций для исполнения процессором, или который инструктирует системе выполнять любой один или более из способов или операций, раскрытых в данном документе. В контексте настоящего документа термин "машиночитаемый носитель" явно определяется как включающий в себя любой тип машиночитаемого запоминающего устройства и/или диска для хранения и исключающий распространяющиеся сигналы.
[0032] Блоки 302 управления дверьми управляют различными функциями, связанными с соответствующей дверью транспортного средства 100. Например, блок 302 управления дверью управляет задвижкой (например, электронной задвижкой), положением бокового зеркала заднего вида и положением окна. Блок 302 управления дверью включает в себя электронную схему (например, дискретные компоненты, интегральные схемы, процессор и т.д.), чтобы, например, управлять задвижкой, управлять приводами, чтобы манипулировать окном, и осуществлять связь с модулем 108 управления кузовом. Блок 302 управления дверью электрически соединяется с устройствами ввода (например, тумблерами, переключателями, кнопками и т.д.), чтобы управлять окном и/или задвижкой.
[0033] В иллюстрированном примере информационная шина 304 транспортного средства соединяет с возможностью передачи данных датчики 102, бортовую платформу 104 связи и модуль 108 управления кузовом. В некоторых примерах информационная шина 304 транспортного средства включает в себя одну или более информационных шин. Информационная шина 304 транспортного средства может быть реализована в соответствии с протоколом шины локальной сети контроллеров (CAN), который определен Международной организацией стандартизации (ISO) 11898-1, протоколом шины передачи данных мультимедийных систем (MOST), протоколом гибкой информационной CAN-шины (CAN-FD) (ISO 11898-7) и/или протоколом шины K-line (ISO 9141 и ISO 14230-1) и/или протоколом Ethernet™-шины IEEE 802.3 (2002 г. и далее), и т.д.
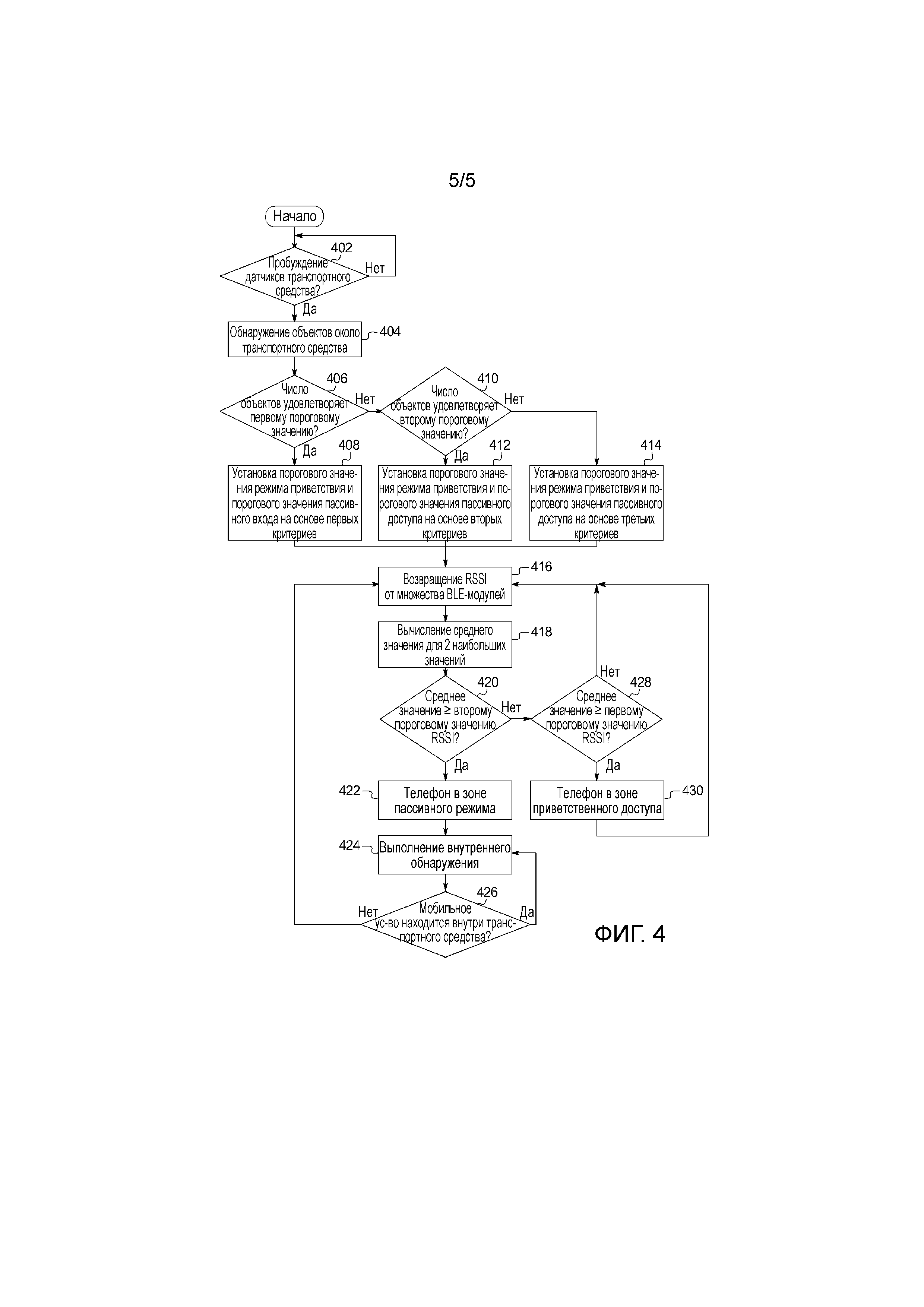
[0034] Фиг. 4 - это блок-схема последовательности операций способа, чтобы определять местоположение мобильного устройства 112 на основе обнаружения объектов 216 поблизости от транспортного средства 100, который реализуется посредством электронных компонентов 300 на фиг. 3. Первоначально, на этапе 402, PaaK-блок 114 ожидает до тех пор, когда он должен пробуждать датчики 102 обнаружения диапазона и/или DSRC-модуль 110. PaaK-блок 114 пробуждает датчики 102 обнаружения диапазона и/или DSRC-модуль 110 в ответ на обнаружение мобильного устройства 112 в диапазоне (например, через опрашивающий широковещательный сигнал). На этапе 404 PaaK-блок 114 обнаруживает объекты 216 около транспортного средства 100. На этапе 406 PaaK-блок 114 определяет, удовлетворяет ли количество объектов 216 около транспортного средства 100 первому пороговому значению плотности. Если количество объектов 216 около транспортного средства 100 удовлетворяет первому пороговому значению плотности, способ продолжается на этапе 408. Иначе, если количество объектов 216 около транспортного средства 100 не удовлетворяет первому пороговому значению плотности, способ продолжается на этапе 410.
[0035] На этапе 408 PaaK-блок 114 устанавливает первое пороговое значение 202 RSSI и второе пороговое значение 204 RSSI на основе плотности объектов поблизости от транспортного средства 100, чтобы они были в категории высокой плотности. На этапе 410 PaaK-блок 114 определяет, удовлетворяет ли количество объектов 216 около транспортного средства 100 второму пороговому значению плотности. Если количество объектов 216 около транспортного средства 100 удовлетворяет второму пороговому значению плотности, способ продолжается на этапе 412. Иначе, если количество объектов 216 около транспортного средства 100 не удовлетворяет второму пороговому значению плотности, способ продолжается на этапе 414. На этапе 412 PaaK-блок 114 устанавливает первое пороговое значение 202 RSSI и второе пороговое значение 204 RSSI на основе плотности объектов поблизости от транспортного средства 100, чтобы они были в категории средней плотности. На этапе 414 PaaK-блок 114 устанавливает первое пороговое значение 202 RSSI и второе пороговое значение 204 RSSI на основе плотности объектов поблизости от транспортного средства 100, чтобы они были в категории низкой плотности.
[0036] На этапе 416 PaaK-блок 114 извлекает или иначе принимает RSSI-значения, принятые посредством множества беспроводных узлов 106 на внешней стороне транспортного средства 100. RSSI-значения принимаются посредством беспроводных узлов 106 от одного и того же мобильного устройства 112 в ответ на опрашивающий широковещательный сигнал. На этапе 418 PaaK-блок 114 вычисляет среднее значение для двух наивысших RSSI-значений. На этапе 420 PaaK-блок 114 определяет, удовлетворяет ли среднее RSSI-значение второму пороговому значению 204 RSSI. Если среднее RSSI-значение удовлетворяет второму пороговому значению 204 RSSI, способ продолжается на этапе 422. Иначе, если среднее RSSI-значение не удовлетворяет второму пороговому значению 204 RSSI, способ продолжается на этапе 428.
[0037] На этапе 422 PaaK-блок 114 активирует режим пассивного доступа, например, инструктируя модулю 108 управления кузовом подготавливать двери. На этапе 424 PaaK-блок 114 выполняет внутреннее обнаружение, чтобы определять, находится ли мобильное устройство 112 внутри транспортного средства 100. Чтобы выполнять внутреннее обнаружение, PaaK-блок 114 сравнивает RSSI-значения от беспроводных узлов 106 на внешней стороне транспортного средства 100 с RSSI-значением(ями) от беспроводного узла(ов) внутри транспортного средства 100. На этапе 426 PaaK-блок 114 определяет, находится ли мобильное устройство 112 внутри транспортного средства 100. Если мобильное устройство 112 находится внутри транспортного средства 100, способ возвращается к этапу 424. Иначе, если мобильное устройство 112 не находится внутри транспортного средства 100, способ возвращается к этапу 416.
[0038] На этапе 428 PaaK-блок 114 определяет, удовлетворяет ли среднее RSSI-значение первому пороговому значению 202 RSSI. Если среднее RSSI-значение удовлетворяет первому пороговому значению 202 RSSI, способ продолжается на этапе 430. Иначе, если среднее RSSI-значение не удовлетворяет первому пороговому значению 202 RSSI, способ возвращается к этапу 416. На этапе 430 PaaK-блок 114 активирует режим приветствия, например, инструктируя модулю 108 управления кузовом, например, освещать один или более приветственных фонарей (например, внутренние и/или внешние фонари) транспортного средства.
[0039] Блок-схема последовательности операций на фиг. 4 представляет машино-читаемые инструкции, сохраненные в памяти (такой как память 308 на фиг. 3), которые содержат одну или более программ, которые, когда исполняются процессором (таким как процессор 304 на фиг. 3), инструктируют транспортному средству 100 реализовывать примерный PaaK-блок 114 на фиг. 1 и 3. Дополнительно, хотя примерная программа(ы) описывается/описываются со ссылкой на блок-схему последовательности операций на фиг. 4, множество других способов реализации примерного PaaK-блока 114 может быть альтернативно использовано. Например, порядок выполнения этапов может быть изменен, и/или некоторые из описанных этапов могут быть изменены, устранены или объединены.
[0040] В этой заявке использование разделительных союзов подразумевается включающим в себя соединительные союзы. Использование формы единственного числа не подразумевается указывающим число элементов. В частности, ссылка на объект в единственном числе предназначена, чтобы обозначать также один из возможного множества таких объектов. Дополнительно, союз "или" может быть использован, чтобы передавать признаки, которые присутствуют одновременно, вместо взаимно исключающих альтернатив. Другими словами, союз "или" должен пониматься как включающий в себя "и/или". Термины "включает в себя", "включающий в себя" и "включать в себя" являются инклюзивными и имеют тот же контекст, что и "содержит", "содержащий" и "содержать", соответственно.
[0041] Вышеописанные варианты осуществления, и, в частности, какие-либо "предпочтительные" варианты осуществления, являются возможными примерами реализаций и просто излагаются для ясного понимания принципов изобретения. Множество изменений и модификаций могут вноситься в вышеописанные варианты осуществления без существенного отступления от сущности и принципов технологий, описанных в данном документе. Все модификации имеют намерение быть включенными в данный документ в пределах объема этого раскрытия и защищенными посредством прилагаемой формулы изобретения.
Реферат
Изобретение относится к способам дистанционного управления для транспортного средства, а именно к определению местоположения телефона как ключа на основе обнаружения объекта. Транспортное средство содержит датчики для обнаружения объектов около транспортного средства, беспроводные узлы для приема значений мощности принятого сигнала (RSSI) от мобильного устройства и блок ключа в виде телефона, определения первого порогового значения RSSI на основе количества и в ответ на среднее значение для фрагмента RSSI-значений, удовлетворяющее первому пороговому значению RSSI, подготавливать дверь транспортного средства. Способ определения местоположения мобильного устройства содержит этапы, на которых обнаруживают объекты около транспортного средства, принимают значения мощности принятого сигнала (RSSI) от мобильного устройства, определяют количество объектов около транспортного средства, определяют первое пороговое значение RSSI на основе количества и в ответ на среднее значение для фрагмента RSSI-значений, удовлетворяющее первому пороговому значению RSSI, подготавливают дверь транспортного средства. Достигается дистанционное управление транспортным средством с телефона. 3 н. и 13 з.п ф-лы, 5 ил.
Комментарии