Система управления поездом и железнодорожным депо - RU2640389C1
Код документа: RU2640389C1
Чертежи



Описание
Ссылка на родственную заявку
Настоящая заявка испрашивает приоритет в соответствии с предварительной заявкой на выдачу патента США №61/909,899, поданной 27 ноября 2013 года, содержание которой тем самым включено в настоящую заявку посредством ссылки.
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к системе датчиков, в частности к системе датчиков, контролирующей различные характеристики, параметры и местонахождение железнодорожных вагонов и локомотивов в составе поезда, именуемом также поездом или составом, а также отцепленных железнодорожных вагонов и локомотивов в депо за счет использования одной или нескольких беспроводных ячеистых сетей передачи данных.
Предшествующий уровень техники настоящего изобретения
Возможность отслеживания и определения местонахождения подвижного состава в режиме реального времени, в том числе железнодорожных вагонов, локомотивов и поездов, приобретает все большее значение для владельцев железных дорог и операторов-перевозчиков.
С точки зрения безопасности крайне важно иметь возможность контролировать различные рабочие параметры железнодорожных вагонов, например температуру подшипников, в реальном масштабе времени, чтобы можно было прогнозировать и предотвращать неминуемые отказы, которые могли бы привести к серьезным последствиям, таким как сход поезда с рельсов. Важно также вовремя подать сигнал тревоги о наличии опасного состояния и передать рабочие параметры, ставшие причиной выдачи предупредительного сигнала, непосредственно машинисту поезда или в центр дистанционного управления железнодорожными перевозками с тем, чтобы можно было своевременно принять меры по устранению аварийного состояния.
С эксплуатационной точки зрения операторам-перевозчикам важно определить, находится ли железнодорожный вагон в составе поезда за пределами или внутри депо, а также установить, загружен ли железнодорожный вагон или нет. Значимость информации о текущем состоянии железнодорожных вагонов заключается в том, что оператор-перевозчик может определить, используются ли железнодорожные вагоны в каждый данный момент времени или простаивают, что облегчает управление операциями в депо.
В существующей отраслевой практике управление составами поездов и вагонными парками основывается на считывании пассивных меток радиочастотной идентификации (RFID), закрепленных на каждом железнодорожном вагоне, в фиксированных точках железнодорожной сети. И хотя этот способ обеспечивает высокую производительность работы операторов железных дорог, он лишен преимуществ динамической беспроводной сети, способной передавать информацию и данные, например, о местонахождении, состоянии или рабочих характеристиках, которые выходят за пределы рабочего диапазона RFID-ридера. Кроме того, в существующей системе не предусмотрен механизм передачи сигналов тревоги об эксплуатационных неисправностях на локомотив, который позволил бы вовремя предупреждать об опасности.
С учетом жестких условий эксплуатации и суровых климатических условий, в которых работают железнодорожные составы, любая система непрерывного контроля должна быть защищена от внешних воздействий, обладать эксплуатационной надежностью и способностью работать в течение длительного периода времени с минимальным вмешательством для проведения технического обслуживания или вообще без такового. Кроме того, для обеспечения рентабельности системы ее установка, обслуживание и эксплуатация не должны требовать существенных дополнительных затрат. Поскольку только в Северной Америке эксплуатируется свыше полутора миллионов грузовых железнодорожных вагонов, крайне востребована система непрерывного контроля за всеми используемыми вагонами; при этом указанная система должна обладать возможностью наращивания с тем, чтобы она могла справляться с огромным количеством потенциально используемых устройств.
Следовательно, необходимо предложить такую систему контроля, которая могла бы использоваться во время движения поезда с целью непрерывного отслеживания различных рабочих параметров железнодорожных вагонов и передачи данных об аварийном состоянии непосредственно машинисту или за пределы состава и которая могла бы также использоваться в отношении поездов и/или железнодорожных вагонов, находящихся в депо, для облегчения управления процессами формирования и роспуска составов.
Краткое раскрытие настоящего изобретения
Соответственно, цель настоящего изобретения заключается в том, чтобы предложить систему связи для железнодорожного вагона, в котором предусмотрен блок управления связью и один или несколько беспроводных датчиков, образующих ячеистую вагонную сеть, покрывающую железнодорожный вагон и отнесенную к конкретному вагону. Блок управления связью поддерживает множество беспроводных датчиков в ячеистой сети на базе открытых стандартных протоколов. Архитектура ячеистой вагонной сети является основополагающим структурным элементом международного стандарта беспроводной связи (IEC 62591), а также стандарта ISA 100.11 Международного общества автоматизации.
В блоке управления связью предусмотрены средства мониторинга выходных данных с различных беспроводных датчиков, закрепленных на железнодорожном вагоне, и определения характера изменения режима работы и состояния железнодорожного вагона и его различных узлов на основе анализа данных. Беспроводные датчики собирают, сохраняют, анализируют и обрабатывают данные, которые затем передаются в блок управления связью для дальнейшей передачи на локомотив, где машинист или автоматизированная система принимает решение о передаче полученных данных в центр дистанционного управления железнодорожными перевозками или обработке и анализе этих данных с целью генерирования сигнала тревоги, регистрации события или составления отчета. Это дает гарантию надлежащей работы и состояния вагонов, а также своевременной и эффективной выдачи операторам-перевозчикам и владельцам железнодорожных вагонов, входящих в состав поезда, необходимых предупреждений о приближающемся или фактическом отказе.
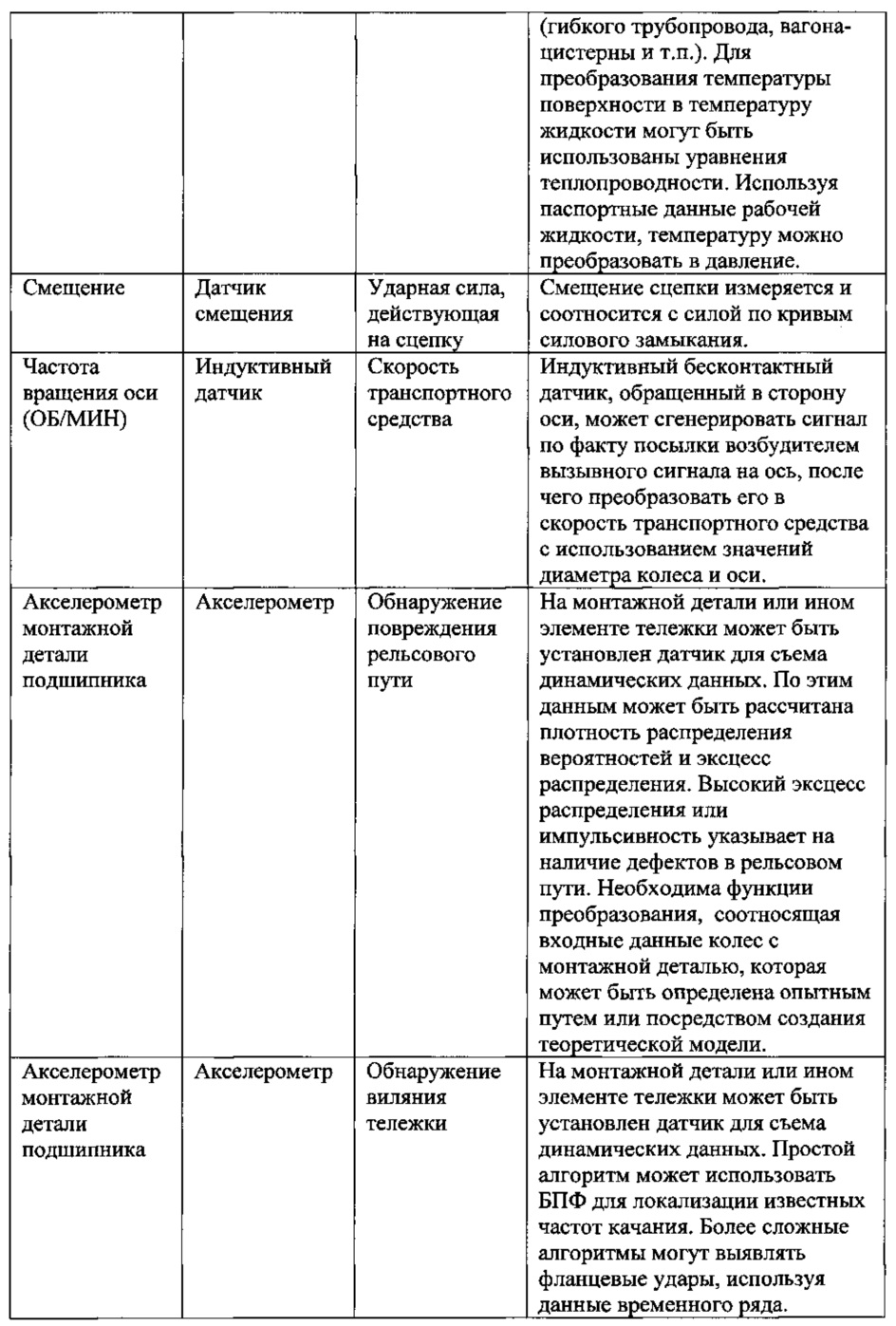
К числу эксплуатационных параметров, которые целесообразно отслеживать, относятся, помимо прочего: температура роликовых подшипников, температура перевозимого груза, положение ручного тормоза, смещение переходника роликовых подшипников, состояние колес, виляние/деформация/заклинивание тележек, статус и эксплуатационные характеристики тормоза, статус и величина нагрузки, потенциально проблематичное состояние пути, а также имеет ли место частичный сход вагона с рельсов.
Еще одна из целей настоящего изобретения заключается в том, чтобы предложить ячеистую поездную сеть, покрывающую состав поезда, которая образуется блоками управления связью каждого вагона в составе поезда и приводным беспроводным шлюзом на хосте или в пункте управления, такой как локомотив.
Каждый железнодорожный вагон снабжен блоком управления связью, который связан со всеми беспроводными датчиками, размещенными на вагонах. Блок управления связью может собирать данные с каждого из беспроводных датчиков и выполнять высокоуровневый анализ данных для выявления приближающихся или фактических отказов. В ходе выполнения такого анализа может быть применен набор эвристических правил для выявления потенциальных неисправностей по статистическим моделям и опытным данным. Блок управления связью также способен передавать данные и результаты любого анализа в какую-либо иную систему, расположенную вне железнодорожного вагона, используя любой из многочисленных протоколов передачи данных.
Дистанционный приемник может располагаться, например, на поезде, в депо или за пределами железнодорожного состава в центре дистанционного управления железнодорожными перевозками. Дистанционный приемник способен также выполнять высокоуровневый анализ состояния поезда путем применения набора эвристических правил и статистических моделей в отношении данных, событий и аварийных сигналов, получаемых с множества блоков управления связью, установленных на разных железнодорожных вагонах поезда. Анализ собранных данных может проводиться в любом из множества модулей обработки событий, распределенных по различным составным частям настоящего изобретения, включая блоки датчиков, блоки управления связью, поездные или наземные беспроводные шлюзы с приводом или иные наземные станции. Модуль обработки событий используется для выявления изменений состояния и определения действий, которые необходимо выполнить на устройстве, по множеству входных данных, получаемых внутри системы или извне. Логика, используемая для определения конечного результата, основана на наборе правил, которые могут задаваться и обновляться дистанционно.
Таким образом, цель настоящего изобретения заключается в том, чтобы предложить комплексную систему, способную обеспечить сбор данных и анализ этих данных для прогнозирования эксплуатационных отказов и выдачи соответствующих предупредительных сигналов о возможности таких отказов с тем, чтобы обеспечить своевременное вмешательство человека или автоматизированной системы до того, как произойдет катастрофический отказ. Такие предупредительные сигналы могут ранжироваться по высокому приоритету и обычному приоритету. Система будет перемещать высокоприоритетные предупреждения в начало очереди на передачу предупредительных сообщений. Предупреждения обычного приоритета будут следовать неэвристическому алгоритму передачи предупредительных сообщений о возможных эксплуатационных отказах.
Еще одна из целей настоящего изобретения заключается в том, чтобы предложить систему управления поездами, предусматривающую покрытие депо ячеистой сетью и содержащую один или несколько беспроводных шлюзов с приводом, установленных в депо, которые выступают в качестве пунктов передачи информации и агрегаторов данных, генерируемых и передаваемых ячеистыми сетями всех железнодорожных вагонов, находящихся в депо. Кроме того, приводные беспроводные шлюзы управляют составами и проводят анализ данных с множества отслеживаемых объектов и систем.
Настоящее изобретение также относится к способу отслеживания вагонов в депо; при этом устанавливается местонахождение железнодорожного вагона в депо, определяется и подтверждается его ориентация и место в составе поезда. Место железнодорожного вагона в составе поезда, его ориентацию и/или местонахождение в депо можно установить несколькими способами, в том числе, помимо прочего, по данным GNSS (глобальной навигационной спутниковой системы, такой как GPS), данным с датчиков движения, показаниям компаса, показаниям RFID, данным с датчиков ускорения и показателю уровня мощности принимаемого сигнала (RSSI) в близлежащих узлах. Ориентация железнодорожного вагона в составе поезда является критически важным элементом при формировании состава. Как известно, в описываемой отрасли конец железнодорожного вагона обозначается литерой A или B. Для определения ориентации вагона могут быть использованы показания магнитометра или электронного компаса и акселерометра. Кроме этого, ориентация может определяться по местонахождению компонентов системы на железнодорожном вагоне.
Предложены также способы управления вагонами в депо и способы управления поездом, которые оба могут выполняться системой, описанной в настоящем документе.
Краткое описание фигур
Для более глубокого понимания нижеследующего подробного описания его следует рассматривать в привязке к фигурам, прилагаемым к настоящему документу, на которых показан предпочтительный вариант реализации заявленного изобретения, носящий исключительно иллюстративный характер. При этом следует иметь в виду, что настоящее изобретение не ограничено представленным вариантом его осуществления или конкретными проиллюстрированными схемами.
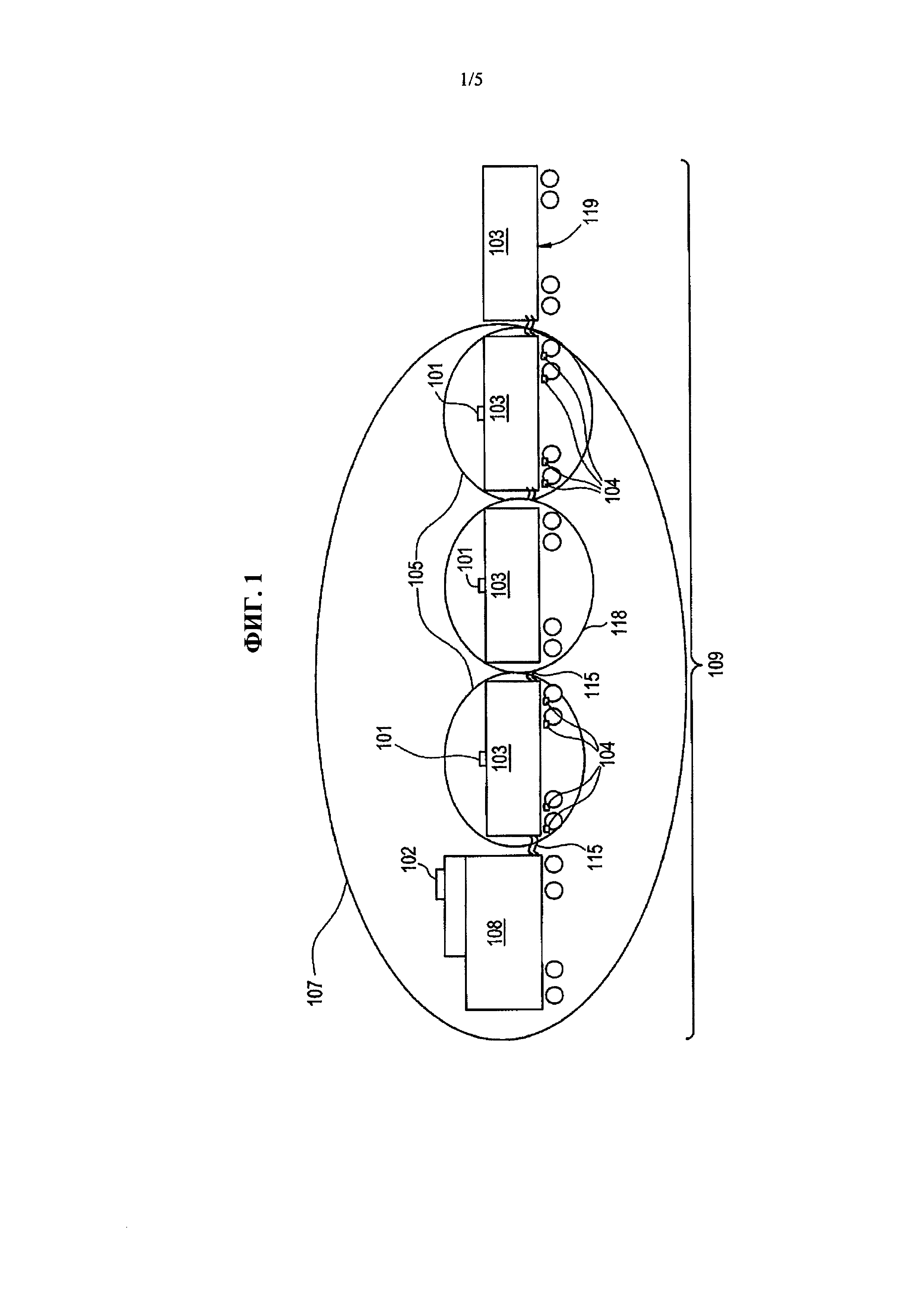
На фиг. 1 показано перспективное изображение двух железнодорожных вагонов, в каждом из которых предусмотрен блок управления связью и множество беспроводных сенсорных блоков, установленных вблизи колесных подшипников железнодорожного вагона; один железнодорожный вагон, снабженный только блоком управления связью без беспроводных сенсорных блоков; один железнодорожный вагон без блока управления связью; и локомотив с установленным на нем приводным беспроводным шлюзом; при этом блок управления связью и множество беспроводных датчиков, установленных на железнодорожном вагоне, образуют ячеистую вагонную сеть и сообщаются с приводным беспроводным шлюзом на хосте или в пункте управления, таком как локомотив или иной объект, образуя ячеистую поездную сеть;
На фиг. 2 представлена блок-схема системы связи депо и структура ячеистой поездной сети с локальной сетью согласно одному из вариантов осуществления настоящего изобретения;
На фиг. 3 представлена блок-схема формирования состава поезда;
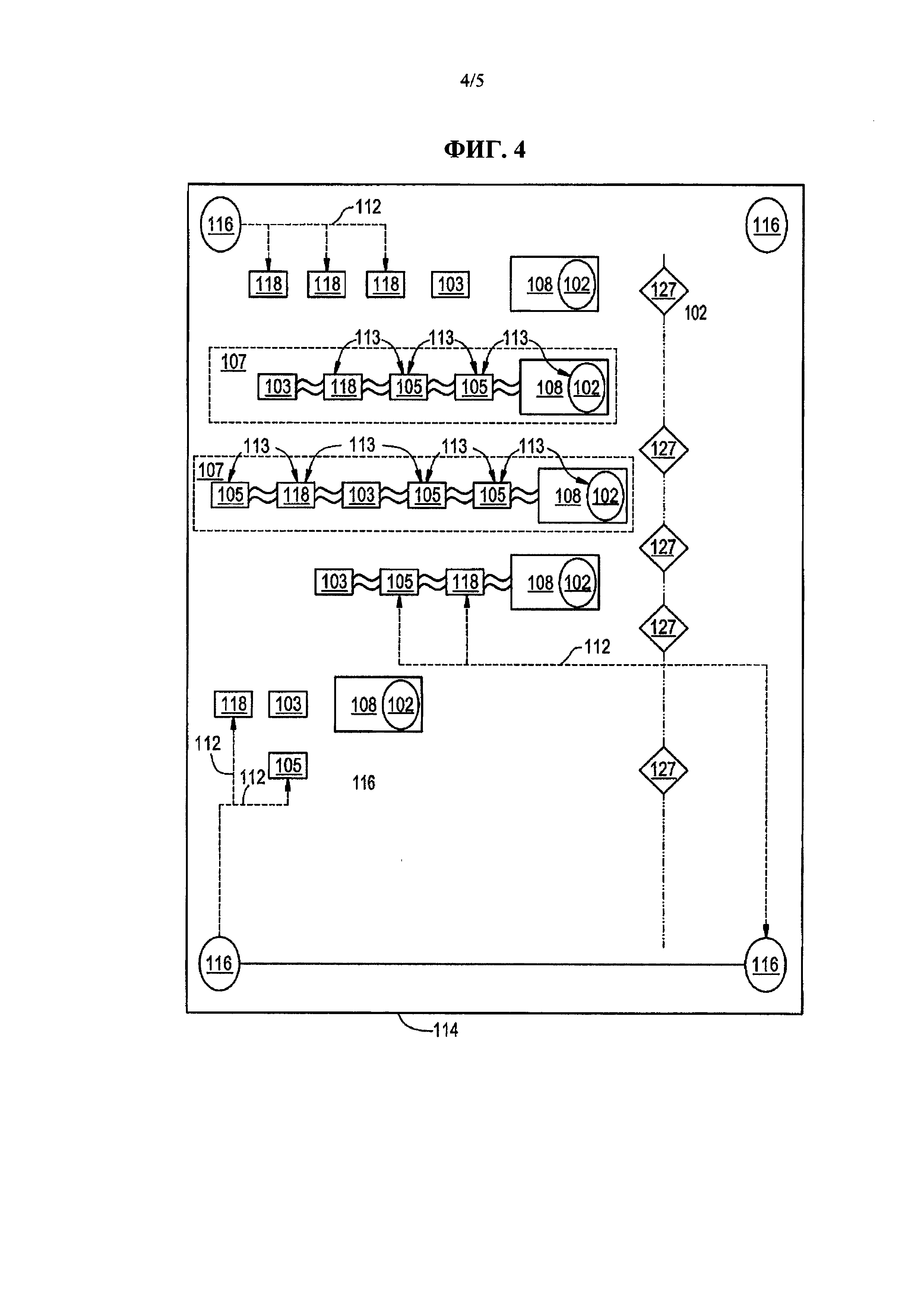
На фиг. 4 представлена блок-схема организации ячеистой поездной сети; и
На фиг. 5 представлена блок-схема валидации состава поезда.
Подробное раскрытие настоящего изобретения
Депо, обозначенное на чертеже позицией (114), представляет собой зону, в которой выстаиваются, сортируются и составляются вместе локомотивы и железнодорожные вагоны, образующие состав поезда, где распускаются составы поездов и где заправляются топливом, обрабатываются, загружаются, разгружаются и обслуживаются локомотивы и железнодорожные вагоны.
Состав поезда, обозначенный на чертеже позицией (109), определяется как группа соединенных друг с другом железнодорожных вагонов (103) и локомотива (108).
Беспроводной сенсорный блок (БСБ), обозначенный на чертеже позицией (104), устанавливается на железнодорожном вагоне (103) и в предпочтительном варианте помещается в изолированный защитный корпус; при этом он может содержать один или несколько датчиков, источник питания и совокупность схем связи, которые позволяют БСБ поддерживать связь с блоком (101) управления связью (БУС) в ячеистой вагонной сети. Блок БСБ (104) может также обладать интеллектуальными возможностями для анализа данных, полученных с датчиков, и определения того, следует ли эти данные передать немедленно, сохранить их для последующей передачи или свести в событие или сигнал тревоги. Блок БСБ (104) используется для считывания контролируемого параметра (например, температуры подшипников или окружающего воздуха) или состояния (например, положения люка или ручного тормоза). Все блоки БСБ (104) одного железнодорожного вагона (103) образуют ячеистую вагонную сеть (105), управляемую блоком (101) управления связью. Примеры БСБ описаны в опубликованной заявке на выдачу патента США №2013/0342362, содержание которой тем самым включено в настоящую заявку посредством ссылки.
Блок управления связью (БУС), обозначенный на чертеже позицией (101), установлен на железнодорожном вагоне (103). Он управляет ячеистой вагонной сетью (105), которая покрывает железнодорожный вагон (103). В состав аппаратного обеспечения БУС (101) предпочтительно входят следующие элементы: процессор; источник питания (например, аккумуляторная батарея, солнечная батарея или внутренний источник выработки электроэнергии); устройство глобальной навигационной спутниковой системы, такое как приемник глобальной навигационной спутниковой системы (GPS); устройство Wi-Fi; спутниковая и/или сотовая система радиосвязи; система беспроводной телекоммуникационной связи для обслуживания ячеистой вагонной сети (105); и - опционально - один или несколько датчиков, в том числе, помимо прочего, акселерометр или датчик температуры. Блок БУС (101) поддерживает один или несколько блоков БСБ (104) в конфигурации ячеистой сети с использованием открытых протоколов связи, например стандарта радиосвязи IEEE 802.15.4 диапазона 2,4 ГГц. Кроме того, блок БУС (101) также является составной частью ячеистой поездной сети (107), которая состоит из блоков БУС (101) всех подключенных железнодорожных вагонов (103) в составе (109) поезда, управляемых приводным беспроводным шлюзом (102), который установлен на локомотиве (108); или же он является составной частью ячеистой сети (117) депо, управляемой одним или несколькими приводными беспроводными шлюзами (116), распределенными по всему депо (114). Таким образом, блок БУС (101) выполняет четыре функции: 1) управляет слаботочной ячеистой вагонной сетью (105), покрывающей железнодорожный вагон (103); 2) обобщает данные с одного или нескольких блоков БСБ (104) в ячеистой вагонной сети (105) и применяет логику в отношении собранных данных с целью генерирования и выдачи сигналов тревоги на хост, например, на локомотив (108) или в центр (120) дистанционного управления железнодорожными перевозками; 3) поддерживает встроенные датчики, такие как акселерометр, в блоке БУС (101) для мониторинга конкретных параметров железнодорожного вагона (103), таких как местонахождение, скорость движения, ускорение движения и другие; и 4) поддерживает двустороннюю связь по восходящему тракту с хостом или пунктом управления, таким как локомотив (108) и/или центр (120) контроля подвижного состава и дистанционного управления железнодорожными перевозками, а также двустороннюю связь по нисходящему тракту с одним или несколькими блоками БСБ (104), установленными на железнодорожном вагоне. Блок БУС (101) может сообщаться беспроводным способом с БПШ (102) в конфигурации ячеистой сети; или же он может быть выполнен с возможностью поддержания связи через проводное соединение, например через тормозную систему ЕСР (пневматические тормоза с электронным управлением). Специалистам в данной области техники понятно, что система GPS является лишь одним из возможных вариантов глобальной навигационной спутниковой системы (GNSS). К GNSS других типов относятся такие системы, как ГЛОНАСС и BeiDou, при этом на стадии разработки находятся и иные системы. Соответственно, хотя в вариантах осуществления заявленного изобретения, описанных в настоящем документе, используется система GPS, может быть использована система GNSS любого иного типа.
Блок БУС (101) способен принимать данные и/или сигналы тревоги с одного или нескольких блоков БСБ (104) и делать выводы по этим данным или сигналам тревоги о рабочих параметрах железнодорожного вагона (103), а также передавать данные и информацию об аварийных сигналах на удаленный приемник. В предпочтительном варианте блок БУС (101) представляет собой единый блок, служащий каналом связи с другими пунктами, такими как подвижная базовая станция (102) (например, локомотив (108)), наземная базовая станция (116) и прочие; при этом он выполнен с возможностью обработки полученных данных. Блок БУС (101) также поддерживает связь с органами управления и мониторами блока БСБ (104) в локальной ячеистой поездной сети (105).
Приводной беспроводной шлюз (ПБШ), обозначенный на чертеже позицией (102), или установлен на локомотиве (108), что является предпочтительным вариантом, или развернут как часть ячеистой сети (117) депо. Обычно он включает в себя следующие элементы: процессор; приемник GPS; спутниковую и/или сотовую систему радиосвязи; локальный беспроводной приемопередатчик (например, Wi-Fi), порт Ethernet; диспетчер ячеистой сети с высокой пропускной способностью и иные средства связи. Шлюз ПБШ (102) запитывается с локомотива (108), если он установлен на объекте с силовым приводом, таком как локомотив (108); или же он может получать питание из другого источника, например с гелиоустановки или аккумуляторной батареи большой емкости. Шлюз ПБШ (102) управляет ячеистой поездной сетью (107), покрывающей состав (109) поезда и включающей в себя множество блоков БУС (101) каждого из железнодорожных вагонов (103) в составе (109) поезда; изолированными блоками БУС (101), которые не входят в состав поезда; или ячеистой сетью (117) депо, покрывающей депо (114), которая включает в себя наземные ПБШ (116) и блоки БУС (101) отдельных железнодорожных вагонов (103), в настоящее время отцепленных от состава (109) поезда.
Элементы и конфигурация ПБШ (102) аналогичны элементам и конфигурации блока БУС (101), за исключением того, что ПБШ (102) получает питание из внешнего источника, тогда как блок БУС (101) снабжен собственным источником питания. Кроме того, ПБШ (102) собирает данные и делает выводы о рабочих характеристиках состава (109) поезда и ячеистой поездной сети (107) в отличие от блоков БУС (101), которые делают выводы о рабочих характеристиках отдельных железнодорожных вагонов (103) и ячеистой вагонной сети (105) или (118).
«Молчащий» железнодорожный вагон (103) представляет собой железнодорожный вагон (103), в котором предусмотрен блок БУС (101), но который не связан или не соединен с ячеистой поездной сетью (107) или ячеистой сетью (117) депо согласно приведенному ниже определению.
Идентификатор поездной сети (ИПС), обозначенный на чертеже позицией (113), однозначно идентифицирует ячеистую поездную сеть (107) и используется во время формирования ячеистой поездной сети (107) по завершении формирования состава (109) поезда.
Идентификатор роуминговой сети (ИРС), обозначенный на чертеже позицией (112), однозначно идентифицирует ячеистую сеть (117) депо и используется для отслеживания объектов (например, локомотивов (108) и железнодорожных вагонов (103)), находящихся в депо (114) и отцепленных от состава (109) поезда.
Ячеистая вагонная сеть, обозначенная на чертеже позицией (105), включает в себя блок БУС (101), который установлен на железнодорожном вагоне (103), является частью ячеистой вагонной сети (105) и управляет указанной сетью, состоящей из множества блоков БСБ (104), каждый из которых в предпочтительном варианте установлен на одном и том же вагоне (103).
Ячеистая поездная сеть, обозначенная на чертеже позицией (107), включает в себя шлюз ПБШ (102), который установлен на локомотиве (108) и который является частью ячеистой поездной сети (107) и управляет указанной сетью, состоящей из множества блоков БУС (101), каждый из которых установлен на отдельном железнодорожном вагоне (103); при этом локомотив (108) и множество железнодорожных вагонов (103) образуют состав (109) поезда, а ячеистая поездная сеть (107) опознается по уникальному идентификатору ИПС (113).
Ячеистая сеть депо, обозначенная на чертеже позицией (117), включает в себя один или несколько наземных ПБШ (116), установленных в стратегических точках депо (114), и, опционально, один или несколько блоков БУС (101), каждый из которых установлен на железнодорожном вагоне (103) и который может являться или не являться частью ячеистой вагонной сети (105). Железнодорожный вагон (103), в котором предусмотрен блок БУС (101), называется контролируемым железнодорожным вагоном (118), а железнодорожный вагон (103), в котором предусмотрен блок БУС (101) и один или несколько блоков БСБ (104), называется ячеистой вагонной сетью (105). Если контролируемый железнодорожный вагон (118) или ячеистая вагонная сеть (105) не связаны или не соединены с ячеистой поездной сетью (107) с идентификатором ИПС (113), то они могут быть подключены к ячеистой сети (117) депо, находящейся в пределах досягаемости, используя идентификатор ИРС (112).
Ячеистая сеть (117) депо опознается по идентификатору ИРС (112). Контролируемый железнодорожный вагон (118) или ячеистая вагонная сеть (105) могут быть подключены только к одной сети, используя или идентификатор ИПС, или идентификатор ИРС в каждый отдельно взятый момент времени.
Нижеследующее описание раскрывает систему применительно к железнодорожному вагону (103), однако любому специалисту в данной области техники понятно, что эти же способы применимы к любому рельсовому транспортному средству или объекту. Также следует отметить, что определения, приведенные выше, не являются исключительными в том аспекте, что определяемые элементы могут характеризоваться наличием дополнительных элементов или признаков, не включенных в данное определение. Кроме того, хотя нижеследующее описание характеризует железнодорожный вагон (103) с двумя тележками, оно применимо к вагонам любой конфигурации, снабженным большим или меньшим числом тележек или осей.
Ячеистая поездная сеть
Как показано на фиг. 1, ячеистая вагонная сеть обозначена позицией (105). Ячеистая вагонная сеть (105) содержит блок БУС (101), установленный на железнодорожном вагоне (103), и один или несколько блоков БСБ (104), установленных на том же вагоне (103). Архитектура ячеистой вагонной сети (105) является основополагающим структурным элементом международного стандарта беспроводной связи (IEC 62591), а также стандарта ISA 100.11 Международного общества автоматизации.
В одном аспекте настоящее изобретение предлагает новаторское устройство, контролирующее эксплуатационные характеристики и работу железнодорожного вагона (103) с использованием ячеистой вагонной сети (105), покрывающей вагон (103), и передающее эти эксплуатационные и рабочие характеристики на хост или в пункт управления, такой как локомотив (108) состава (109) поезда, как это показано на фиг. 1. Блок БУС (101), в предпочтительном варианте установленный на железнодорожном вагоне (103), получает данные и сигналы тревоги с одного или нескольких блоков БСБ (104), также установленных на железнодорожном вагоне (103), и управляет указанными данными и сигналами. При обнаружении проблемы блок БУС (101) подает сигналы тревоги для принятия решения шлюзом ПБШ (102), установленным на объекте, предпочтительно с доступом к источнику питания, и - опционально - в центр (120) контроля подвижного состава и дистанционного управления железнодорожными перевозками.
Система обеспечивает возможность приема событий и информации о состоянии с блока БУС (101) и одного или нескольких блоков БСБ (104), установленных на железнодорожном вагоне (103). В реестр внесены интерфейсы для асинхронного приема событий; или же могут быть вызваны удаленные процедуры для получения информации из блока БУС (101) методом опроса. Интерфейс открывается через веб-сервис или библиотеку; при этом он доступен по локальной сети (110) через SSL-соединение с проверкой прав доступа по уникальному ключу, закрепленному за каждым конечным пользователем.
Как показано на фиг. 1, блок БУС (101) может быть прикреплен непосредственно к железнодорожному вагону (103) любым приемлемым способом, например с помощью самонарезных установочных винтов или любых иных металлических крепежных винтов. Еще один из способов установки блока БУС (101) на железнодорожном вагоне (103) предусматривает его закрепление на монтажном кронштейне с помощью болтов или иных металлических крепежных винтов; при этом указанный кронштейн крепится непосредственно к железнодорожному вагону (103) саморезами или иными металлическими крепежными винтами. Блок БУС (101) выполнен с возможностью конфигурирования одного или нескольких блоков БСБ (104) в локальной ячеистой сети на передачу данных, переход в режим приема или ожидания в точно заданное время.
Блок БУС (101), установленный на каждом железнодорожном вагоне (103), выполнен с возможностью поддержки опционального датчика глобальной навигационной спутниковой системы (GNSS) для определения местонахождения, направления и/или скорости движения железнодорожного вагона (103). Кроме того, блок БУС (101), установленный на каждом железнодорожном вагоне (103), выполнен с возможностью использования встроенных датчиков и/или управления ячеистой вагонной сетью (105) на железнодорожном вагоне (103) для генерирования сообщений, которые должны быть выданы на хост или в пункт управления, такой как локомотив (108).
Блок БУС (101), установленный на железнодорожном вагоне (103), собирает данные, касающиеся работы указанного вагона (103), с одного или нескольких блоков БСБ (104), установленных на железнодорожном вагоне (103). Блоки БСБ (104) передают данные в блок БУС (101). Блок БУС (101) подключен к ячеистой поездной сети (109), покрывающей состав (109) поезда, для передачи данных на приводной беспроводной шлюз (102), установленный на локомотиве (108).
Блок БСБ (104) использует сетевой протокол с возможностью снижения потребляемой мощности, а также характеризуется наличием встроенного радиотрансивера и антенны, сертифицированной для работы в нелицензируемой полосе частот. В каждом блоке БСБ (104) предусмотрен 32-разрядный микроконтроллер с ультранизким потреблением мощности, который позволяет проводить дискретизацию и масштабные автономные вычисления, включая быстрые преобразования Фурье (БПФ), фильтрацию и анализ трендов. Питание блока БСБ (104) осуществляется от литиевых аккумуляторных батарей большой мощности с низким саморазрядом. Каждый блок БСБ (104) выполняет функции маршрутизатора, способного поддерживать связь с любым другим блоком БСБ (104) в пределах дальности связи и закрепленного за ячеистой вагонной сетью (105), вследствие чего в ячеистой вагонной сети (105) создаются резервные каналы связи.
Блок БСБ (104) может быть выполнен с возможностью контроля определенного параметра или состояния, например температуры колесного подшипника; при этом он может быть установлен на железнодорожном вагоне (103) в месте, специально выбранном для осуществления такого контроля. Блок БСБ (104) может характеризоваться наличием одного или множества сенсорных устройств, отслеживающих множество рабочих параметров. Например, блок БСБ (104) может содержать датчик температуры, предназначенный для контроля температуры колесных подшипников; датчик температуры, предназначенный для измерения температуры окружающей среды; и акселерометр. Блок БСБ (104) закреплен непосредственно на железнодорожном вагоне (103) методом сварки, с помощью самонарезных установочных винтов или любых иных металлических крепежных винтов.
Рабочим примером может служить блок БСБ (104) который способен реагировать на температуру колесного подшипника за счет того, что он приварен или иным образом установлен рядом с указанным колесным подшипником, предпочтительно - на монтажной детали подшипника (которая может представлять собой собственно подшипник, переходник подшипника или любое иное дополнительное приспособление, связанное с подшипником). Примеры блоков БСБ (104) описаны в предварительной заявке на выдачу патента США №2013/0342362, содержание которой тем самым включено в настоящий документ посредством ссылки.
Каждый блок БСБ (104) содержит совокупность схем для обеспечения беспроводной связи. В предпочтительном варианте блок БСБ (104), установленный на железнодорожном вагоне (103), входит в состав ячеистой самоорганизующейся вагонной сети (105) вместе с другими блоками БСБ (104) этого же вагона (103) и блоком БУС (101), который также предпочтительно монтируется на этом же железнодорожном вагоне (103), как это показано на фиг. 1. В предпочтительном варианте осуществления настоящего изобретения каждый блок БСБ (104) данного конкретного вагона (103) будет передавать данные или сигналы тревоги в блок БУС (101) этого же железнодорожного вагона (103). Такая передача данных может осуществляться непосредственно, или же данные могут передаваться в блок БУС (101) другим блоком БСБ (104) в составе той же ячеистой вагонной сети (105). В предпочтительном варианте ячеистая самоорганизующаяся вагонная сеть (105) формируется с использованием синхронизированного во времени протокола ячеистой сети, протокола передачи данных для самоорганизующихся сетей беспроводных устройств. Могут быть также использованы и другие протоколы.
Блоки БСБ (104) содержат долгосрочный источник питания, предпочтительно литий-тионилхлоридную аккумуляторную батарею, отвечающую требованиям армейских стандартов. Схемное решение предусматривает стабилизацию питания и управление потреблением мощности, а также возможность продления срока службы батареи за счет экономии ее ресурса, благодаря чему блок БСБ (104) удерживается в состоянии эксплуатационной готовности и периодически или асинхронно активируется для передачи показаний с бортовых датчиков.
Отдельные блоки БСБ (104) устанавливаются на железнодорожном вагоне (103) в зонах, представляющих интерес. Например, на фиг. 1 и 2 показаны температурно-чувствительные блоки БСБ (104), тип которых описан выше и которые установлены на монтажной детали подшипника железнодорожного вагона (103). В данном конкретном примере блоки БСБ (104) могут быть закреплены на монтажных деталях всех колесных подшипников каждого колеса железнодорожного вагона (103). Кроме того, в разных зонах железнодорожного вагона (103) также могут быть установлены термодатчики БСБ (104), реагирующие на температуру окружающей среды и принимающие потоки воздуха. В том случае, если целесообразно отслеживать температуру колесных подшипников, на обычном железнодорожном вагоне (103) предусмотрено девять блоков БСБ (104), снабженных датчиками температуры, по одному на каждую монтажную деталь подшипника (на каждом колесе); и один датчик для измерения температуры окружающей среды. Термодатчик, реагирующий на температуру атмосферного воздуха, передает данные о температуре окружающей среды в блок БУС (101), который передает эту информацию на датчики, установленные на монтажных деталях подшипников по мере того, как они запрашивают эти данные. Это позволяет блокам БСБ (104), установленным на монтажных деталях подшипников, определять температуру подшипников, а затем принимать решение о том, следует ли предпринимать какие-либо дальнейшие действия, такие как подача сигнала тревоги о недопустимо высокой температуре.
Для обеспечения передачи данных, собранных каждым блоком БСБ (104), каждый блок БСБ (104) поддерживает двустороннюю связь с блоком БУС (101), установленным на железнодорожном вагоне (103), который собирает данные с каждого блока БСБ (104), а также может подавать команды на блоки БСБ (104). Как было сказано выше, блок БУС (101) и все блоки БСБ (104), установленные на одном и том же железнодорожном вагоне (103), образуют ячеистую самоорганизующуюся вагонную сеть (105) локальной области для облегчения связи между ними. Обмен пакетами сообщений синхронизирован таким образом, чтобы исключить подавление пакетов в ячеистой вагонной сети (105), чтобы для каждого пакета была установлена очередность и чтобы они были синхронизированы с целью обеспечения рационального использования энергетических ресурсов. Коммуникационный трафик в ячеистой вагонной сети (105) защищен сквозным шифрованием AES-128 (или выше), проверкой целостности сообщений и аутентификацией устройства.
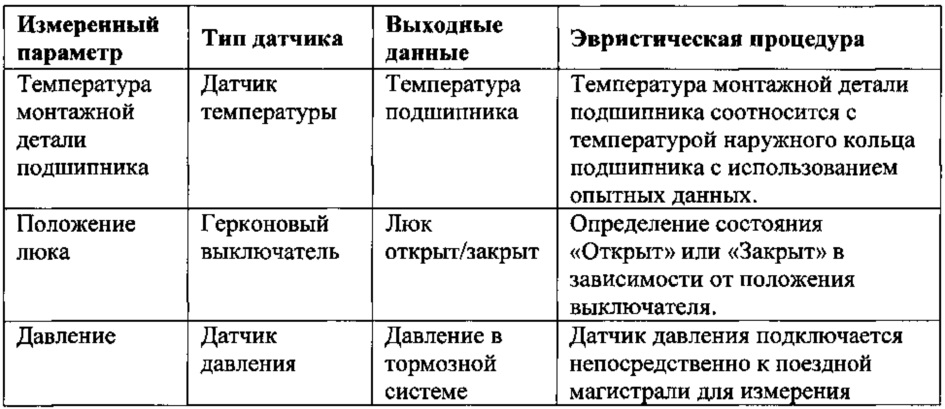
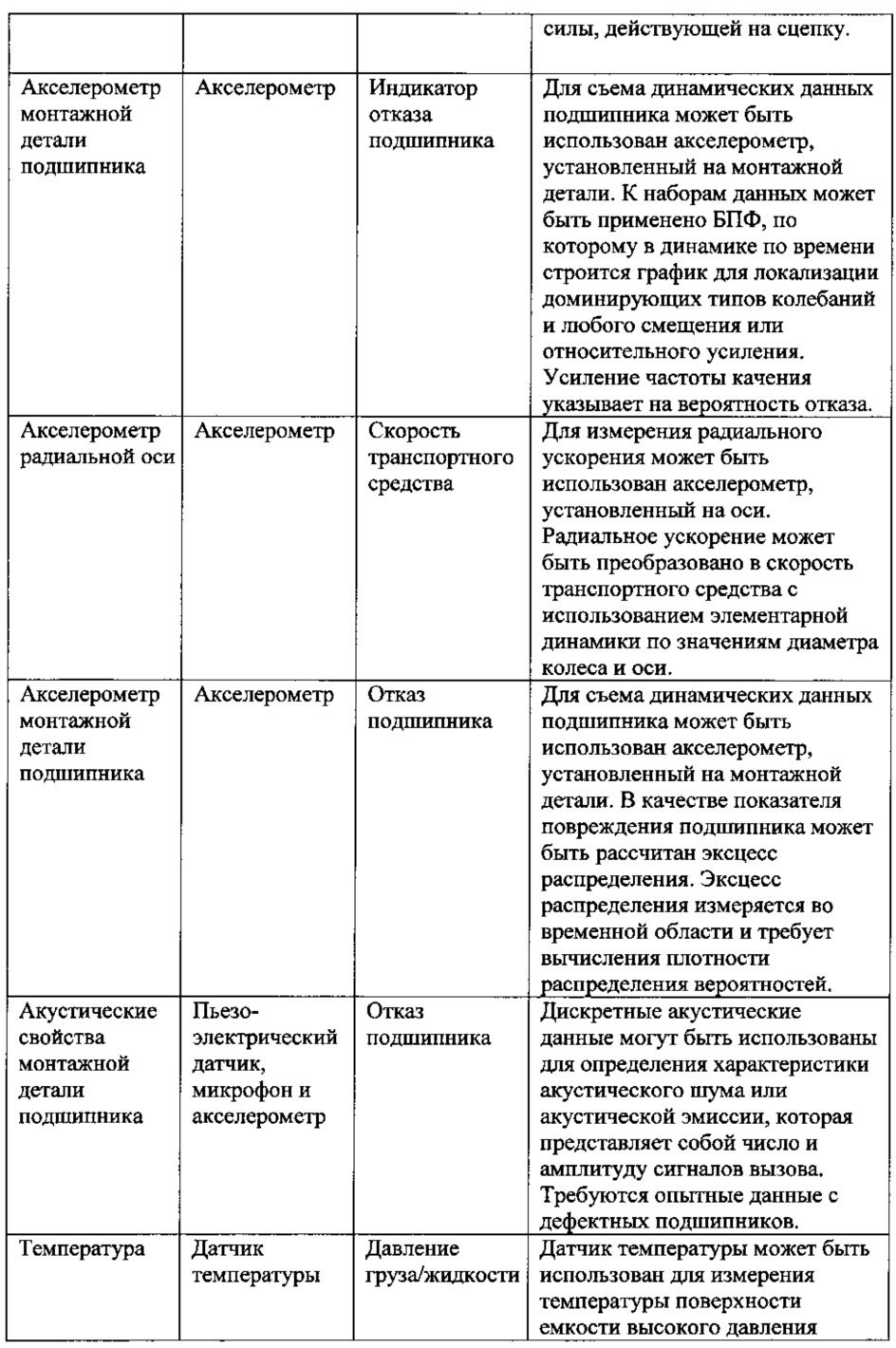
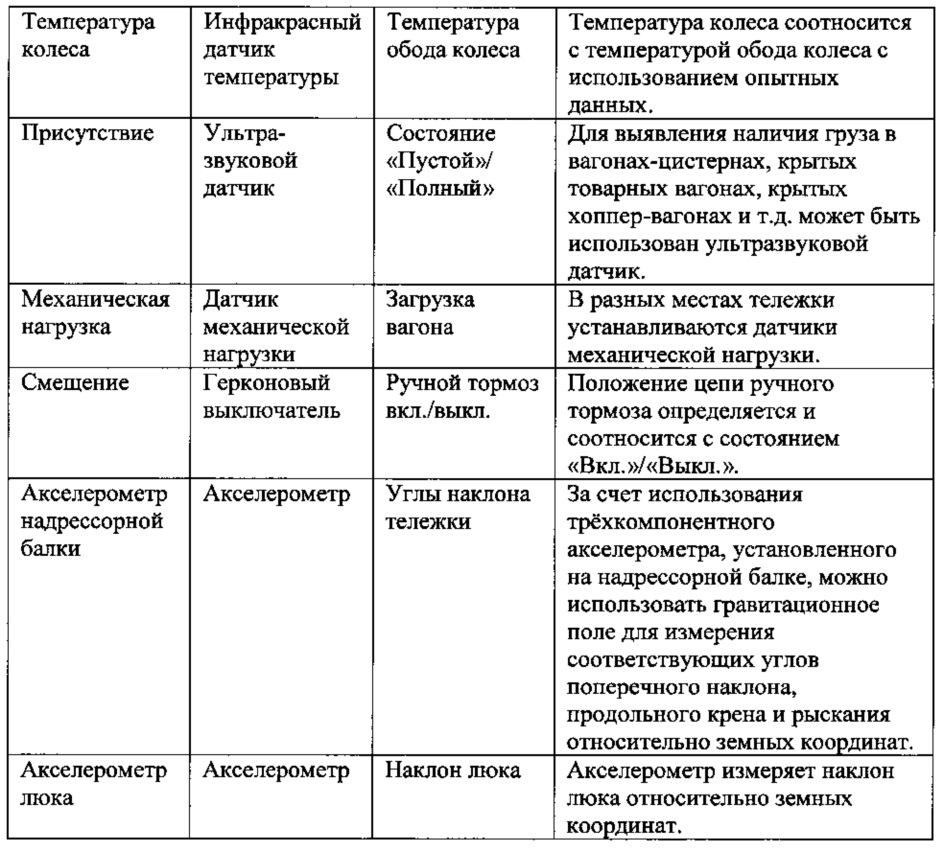
Блок БУС (101) выполнен с возможностью проведения усовершенствованного анализа данных, полученных с множества блоков БСБ (104); при этом он может применять эвристические процедуры для выведения заключений, исходя из результатов такого анализа. В таблице ниже содержатся примеры типов датчиков БСБ (104) и высокоуровневое описание эвристических процедур, применяемых для анализа данных.

Ячеистая поездная сеть
Ячеистая поездная сеть обозначена на фиг. 1 позицией (107). Ячеистая поездная сеть (107) покрывает состав (109) поезда и содержит шлюз ПБШ (102), установленный на хосте или в пункте управления (таком как локомотив (108) или иной объект) с доступом к источнику питания, а также один или несколько блоков БУС (101), каждый из которых относится к ячеистой поездной сети (107) и соответствующей ячеистой вагонной сети (105) при наличии одного или нескольких блоков БСБ (104) или же к соответствующим ячеистым вагонным сетям (118) для железнодорожных вагонов (103), в которых предусмотрен блок БУС (101), но нет блоков БСБ. Таким образом, в рамках настоящей заявки блоки БУС (101) могут относиться к двум ячеистым сетям, т.е. к ячеистой вагонной сети (105) (если на железнодорожном вагоне (103) предусмотрен один или несколько блоков БСБ (104)) и ячеистой поездной сети (107), но обязательна принадлежность только к ячеистой поездной сети (107). Опционально каждый блок БУС (101) также управляет соответствующей ячеистой вагонной сетью (105). Ячеистая вагонная сеть (105) непрерывно контролируется блоком БУС (101) и рассчитана на постоянно меняющуюся беспроводную среду, которая оказывает воздействие на движущийся железнодорожный вагон (103). Ячеистая поездная сеть (107) использует покрытую ячеистую сеть для поддержки низкоэнергетической двусторонней связи по всему составу (109) поезда и со шлюзом ПБШ (102), установленным на локомотиве (108). Покрытая ячеистая поездная сеть (107) состоит из беспроводных приемопередатчиков, встроенных в блок БУС (101), установленных на каждом железнодорожном вагоне (103). Каждый блок БУС (101) выполнен с возможностью передачи сообщения в ячеистую поездную сеть (107) или передачи сообщения с одного блока БУС (101) на другой. Покрытая ячеистая поездная сеть (107) выполнена и работает независимо от ячеистых вагонных сетей (105), предусмотренных на каждом железнодорожном вагоне (103) в составе (109) поезда.
Шлюз ПБШ (102), работающий в обоих направлениях, управляет ячеистой поездной сетью (107) и передает сигналы тревоги с блоков БУС (101), установленных на отдельных железнодорожных вагонах (103), на хост или в пункт управления, такой как локомотив (108); при этом сигналы тревоги могут передаваться дальше или в ручном режиме машинистом, или автоматизированной системой. В локомотиве (108) может быть предусмотрен пользовательский интерфейс для приема и отображения аварийных сообщений, сгенерированных ячеистой поездной сетью (107) или любой отдельно взятой ячеистой вагонной сетью (105). Шлюз ПБШ (102), работающий в обоих направлениях, выполнен с возможностью приема множества сигналов тревоги, событий и исходной информации с блоков БСБ (104) через блоки БУС (101), установленные на каждом отдельно взятом железнодорожном вагоне (103); при этом он может делать выводы о конкретных аспектах работы состава (109) поезда.
Шлюз ПБШ (102), работающий в обоих направлениях, выполнен с возможностью обмена информацией с внешним центром (120) дистанционного управления железнодорожными перевозками, системой сбора и обработки данных или иной системой управления поездом. Этот канал связи показан на фиг. 2, где он обозначен позицией (122). Он может представлять собой локальную сеть, беспроводную сеть Wi-Fi, Bluetooth, сотовые, спутниковые или иные средства связи. Этот канал связи может использоваться для передачи сигналов тревоги за пределы поезда, когда состав (109) находится в пути; или же, когда состав (109) находится в депо (114), он может быть использован для выполнения функций управления поездом, например для определения железнодорожных вагонов (103), которые должны входить в состав (109) поезда, разрешая включать в состав (109) поезда только эти вагоны (103), а также для предоставления информации о железнодорожных вагонах (103), отсутствующих в составе (109) поезда, или о железнодорожных вагонах (103), включенных не в тот состав (109) поезда (т.е. проводить валидацию состава (109) поезда). Если в депо (114) не предусмотрена ячеистая сеть (117), то ячеистая поездная сеть (107) остается в своем текущем состоянии без каких-либо изменений, пока не произойдет одно из следующих событий: пока через пользовательский интерфейс на локомотиве (108) из состава (109) поезда не будут выведены вагоны; пока железнодорожные вагоны (103) не будут перемещены за пределы состава (109) поезда, или через центр (120) дистанционного управления железнодорожными перевозками, или через удаленные серверы по каналам (122) связи.
Ячеистая сеть депо
В другом варианте осуществления настоящего изобретения в привязке к фиг. 3 шлюзы ПБШ (116) и блоки БУС (101) могут являться частью ячеистой сети (117) депо. Наземные ПБШ (116) размещаются в разных точках депо (114) для обеспечения охвата вне зависимости от их местонахождения в депо (114). Шлюзы ПБШ (116) в депо используются для организации ячеистой вагонной сети (105) или (118) устройств на хосте или ином объекте с доступом к источнику питания, а также железнодорожных вагонов (103) в пределах зоны действия ПБШ (116), не связанных с составом (109) поезда. Подробнее этот процесс описан ниже. Таким образом, ячеистая сеть (117) депо состоит из узлов, включающих в себя наземные ПБШ (116); шлюзы ПБШ (112) на локомотиве, если локомотив (108) отцеплен от состава (109) поезда; и блоки БУС (101), если их соответствующие вагоны (103) отцеплены от состава (109) поезда. Если железнодорожный вагон (103), в котором предусмотрен блок БУС (101), не связан с идентификатором ИПС (113), то он связан с идентификатором ИРС (112). Локомотивы (108), в которых предусмотрен шлюз ПБШ (102), могут воспринимать ячеистую сеть (117) депо, фактически не являясь при этом элементами указанной сети.
Интерфейс прикладного программирования (интерфейс API) или пользовательский интерфейс подает команды в шлюз ПБШ (116) депо через центр (120) дистанционного управления железнодорожными перевозками по каналу (122) связи; при этом указанный шлюз поддерживает беспроводную связь с железнодорожными вагонами (103), на которых установлены блоки БУС (101), для формирования соответствующей ячеистой поездной сети (107) по завершении формирования состава (109) поезда. Команды интерфейса API или пользовательского интерфейса также подаются в шлюз ПБШ (102) на локомотиве (108), что позволяет сформировать ячеистую поездную сеть (107), которая согласуется с составом (109) поезда.
Как показано на фиг. 2, сеть Wi-Fi или глобальная сеть, обозначенная позицией (122), выполнена с возможностью передачи данных в блок БУС (101), предусмотренный на каждом железнодорожном вагоне (103), если такой вагон находится в депо (114) и логически не связан с составом (109) поезда (хотя железнодорожный вагон (103) может быть связан с составом (109) поезда физически).
Система управления депо
Описанная выше инфраструктура может быть использована применительно к депо (114) для управления формированием и роспуском состава (109) поезда. В предпочтительном варианте каждый железнодорожный вагон (103) должен быть снабжен одним блоком БУС (101) и одним или несколькими блоками БСБ (104) с акселерометрами для распознавания ориентации и акселерометром для регистрации движения или ударного воздействия. В альтернативном варианте блок БУС (101) на железнодорожном вагоне (103) может быть снабжен внутренним акселерометром и/или магнитометром.
Система управления депо использует четыре состояния сети. Первое состояние называется «В сети». Это означает, что один или несколько железнодорожных вагонов (103), снабженных блоками БУС (101), и один или несколько локомотивов (108), снабженных шлюзами ПБШ (102), подключены к ячеистой поездной сети (107), которая распознается по идентификатору ИПС (113).
Второе состояние называется «Вне сети». Это означает, что один или несколько железнодорожных вагонов (103), снабженных блоками БУС (101), и/или один или несколько локомотивов (108), снабженных шлюзами ПБШ (102), не подключены к ячеистой поездной сети (107), а подключены к ячеистой сети (117) депо, распознаваемой по идентификатору ИРС (112), который передается шлюзами ПБШ (116), установленными в депо (114).
Третье состояние называется «Молчание». Это означает, что один или несколько железнодорожных вагонов (103), снабженных блоками БУС (101), не подключены к ячеистой поездной сети (107) или ячеистой сети (117) депо, что имеет место тогда, когда блок БУС (101) находится вне зоны действия шлюза ПБШ (102) или (116).
Четвертое состояние называется «Не контролируется». Это означает, что один или несколько железнодорожных вагонов (103), в которых нет блоков БУС (101), не могут быть подключены к ячеистой сети (117) депо, ячеистой поездной сети (107) и ячеистой вагонной сети (105) до тех пор, пока вагон (103) не будет снабжен блоком БУС (101). Состояние «Не контролируется» может также относиться к депо (114), в котором не предусмотрен шлюз ПБШ (116) и, соответственно, отсутствует ячеистая сеть (117). Если депо не контролируется, то управлять им будет невозможно, хотя ячеистая поездная сеть (107) может быть организована одним из следующих способов: через пользовательский интерфейс на локомотиве (108) в состав (109) поезда добавляются вагоны (103); вагоны (103) переставляются в пределах зоны действия ячеистой поездной сети (107), или через центр (120) дистанционного управления железнодорожными перевозками, или через удаленные серверы по каналам (122) связи.
Существует четыре способа, с помощью которых блоку БУС (101), установленному на железнодорожном вагоне (103), может быть передана команда на переход с идентификатора ИПС (113) на идентификатор ИРС (112).
1. Первый и основной способ выполняется через шлюз ПБШ (102), установленный на хосте (108), который управляет ячеистой поездной сетью (107), к которой подключен блок БУС (101). Шлюз ПБШ (102) может подать команду на один или несколько блоков БУС (101) для переключения с ячеистой поездной сети (107) с уникальным идентификатором ИПС (113) на ячеистую сеть депо, использующую идентификатор ИРС (112). Шлюз ПБШ (102) осуществляет эту операцию после того, как он распознает ячеистую сеть (117) депо после захода поезда в указанное депо или после подачи соответствующей команды из центра (120) дистанционного управления железнодорожными перевозками или с удаленных серверов по другому каналу (122) связи.
2. Второй способ выполняется через шлюз ПБШ (116), установленный в депо (114). Шлюз ПБШ (116) может передать сообщение о событии, давая команду одному или нескольким блокам БУС (101), подключенным к соответствующей ячеистой сети (117) депо с идентификатором ИРС (112), на переключение на уникальный идентификатор ИПС (113).
3. Третий способ заключается в том, что блок БУС (101), который не является частью ячеистой поездной сети (107) или ячеистой сети (117) депо и который называется «молчащим вагоном», распознает присутствие сети и сам себе подает команду на подключение к обнаруженной сети с идентификатором ИРС (112) или ИПС (113).
4. Четвертый и последний способ выполняется через пользовательский интерфейс (122), используемый машинистом поезда или диспетчером в центре (120) дистанционного управления железнодорожными перевозками. Через пользовательский интерфейс машинист поезда может передать сообщение о событии в блок БУС (101), установленный на железнодорожном вагоне (103), давая ему команду на переключение на ячеистую поездную сеть (107) с уникальным идентификатором ИПС (113) или ячеистую сеть (117) депо с идентификатором ИРС (112). Это сообщение может быть передано через сотовую или иную систему связи по каналу (122), как это показано на фиг. 2.
Формирование состава поезда
На фиг. 3 проиллюстрирован процесс формирования логической связи между железнодорожным вагоном (103) и ячеистой поездной сетью (107). Железнодорожный вагон (103) с блоком БУС (101) физически добавляется в состав (109) поезда на сортировочной горке или во время безгорочной сортировки, хотя логически он по-прежнему остается частью ячеистой сети (117) депо с идентификатором ИРС (112), как это показано на фиг. 3.
Затем железная дорога определяет, какой локомотив (108) должен быть подцеплен к составу (109) поезда. Если локомотив (108) со шлюзом ПБШ (102) закрепляется за группой железнодорожных вагонов (103), которые на данный момент времени уже физически сцеплены, как это показано на фиг. 4, то шлюз ПБШ (102) получает сообщение из центра (120) дистанционного управления железнодорожными перевозками с командой на организацию ячеистой поездной сети (107). На этой стадии локомотив (108) формирует ячеистую поездную сеть, использующую уникальный идентификатор ИПС (113). Локомотив (108) на данном этапе является частью ячеистой поездной сети (107), использующей идентификатор ИПС (113), но он по-прежнему может распознавать ячеистую сеть (117) депо через идентификатор ИРС (112).
Один из механизмов подтверждения того, что состав поезда сформирован, описан ниже. Шлюз ПБШ (102), установленный на выбранном локомотиве (108), может содержать акселерометр, который измеряет ударное воздействие, испытываемое локомотивом (108) при его физическом сцеплении с составом (109) поезда. При физическом сцеплении локомотива (108) с составом (109) поезда акселерометр будет измерять ударные воздействия. Если указанное ударное воздействие превышает заданное пороговое значение, то шлюз ПБШ (102) передает сообщение о событии, подтверждающее факт сцепки локомотива (108) с составом (109) поезда. Представление о том, какие железнодорожные вагоны являются частью состава поезда, важно с точки зрения логистики, и оно может быть получено при сцеплении локомотива (108) с составом (109) поезда. Например, если железнодорожный вагон (103), загруженный химическими продуктами, которые вызывают отравление при попадании в дыхательные пути (TIH-продукты), оказался не в том составе, то формирование этого состава должно быть прервано, а вагон (103) с TIH-продуктами должен быть отцеплен от состава (109) поезда.
Блок БУС (101) на каждом из железнодорожных вагонов (103), приписанных к составу (109) поезда, также получает сообщение по ячеистой сети (117) депо, по сети Wi-Fi депо (114) или по глобальной сети (122) депо (114) с командой на поиск конкретного идентификатора ИПС (113), который будет представлять собой идентификатор ИПС (113), связанный с ячеистой поездной сетью (107), которая управляется шлюзом ПБШ (102) на закрепленном локомотиве (108), как это показано на фиг. 4. На этой стадии блок БУС (101), установленный на каждом из железнодорожных вагонов (103), переключается с ячеистой сети (117) депо и начнет поиск ячеистой поездной сети (107), передающей соответствующий идентификатор ИПС (113). Шлюз ПБШ (102) принимает сообщения, передаваемые блоками БУС (101) всех железнодорожных вагонов (103), которые ячеистая поездная сеть (107) использует для привязки каждого вагона (103) к составу (109) поезда. При обнаружении железнодорожным вагоном (103) локомотива (108) со шлюзом ПБШ (102), который передает идентификатор ИПС (113), потребный этому вагону (103), то железнодорожный вагон (103) подключается к ячеистой поездной сети (107), использующей идентификатор ИПС (113).
Роспуск состава поезда
Когда железнодорожный вагон (103), снабженный блоком БУС (101), заходит в депо (114) в составе (109) поезда, то блок БУС (101) и шлюз ПБШ (102), установленный на локомотиве (108), поддерживают между собой двустороннюю связь по ячеистой поездной сети (107) с конкретным идентификатором ИПС (113).
В депо (114) предусмотрен один или несколько наземных шлюзов ПБШ (116), установленных в фиксированных точках, которые распределены по всей территории депо (114). Наземные шлюзы ПБШ (116) формируют ячеистую сеть (117) депо. Ячеистая сеть (117) депо непрерывно передает закрепленный или назначенный идентификатор ИРС (112).
Шлюз ПБШ (102), установленный на локомотиве (108), принимает сообщение с пользовательского интерфейса по сети Wi-Fi депо, глобальной сети (122) или ячеистой диспетчерской сети (119), как это показано на фиг. 2, которое подает команду шлюзу ПБШ (102) на передачу сообщения в блок БУС (101) каждого железнодорожного вагона (103) с закрепленным идентификатором ИПС (113), который он непрерывно передает. Это сообщение подает команду блоку БУС (101) каждого железнодорожного вагона на переключение с идентификатора ИПС (113) на идентификатор ИРС (112), передаваемый ячеистой сетью (117) депо. На этой стадии железнодорожные вагоны (103) и локомотив (108) могут быть сцеплены физически.
В рамках процесса маневровых операций железнодорожные вагоны (103) затем физически отцепляются от состава (109) поезда и вновь сортируются для формирования одного или нескольких новых составов (109). Ячеистая сеть (117) депо выполнена с возможностью валидации роспуска состава (109) поезда одним или несколькими следующими способами: по местонахождению, скорости, ориентации, наличию движения, RSSI и текущему состоянию сети в соответствии с данными шлюза ПБШ (102), установленного на локомотиве (108) в составе (109) поезда, или блока БУС (101), установленного на железнодорожном вагоне (103) в составе (109) поезда.
Валидация состава поезда
Как показано на фиг. 4 и 5, системы железнодорожного депо (114) фиксируют конкретные вагоны (103), которые должны быть перемещены в другое место для формирования нового состава (109) поезда. Ячеистая поездная сеть (107) выполнена с возможностью сбора информации и валидации сцепки железнодорожных вагонов, образующих состав (109) поезда.
Существует вероятность того, что блок БУС (101) на железнодорожном вагоне (103) не получит сообщение с командой на устранение привязки к идентификатору ИРС (112), передаваемому шлюзом ПБШ (116), который установлен в депо (114), и на повторную привязку к идентификатору ИПС (113), передаваемому шлюзом ПБШ (102), который установлен на ведущем локомотиве (108).
Для валидации состава (109) поезда система должна подтвердить наличие железнодорожных вагонов (103) в составе (109) поезда, порядок их расположения в составе (109) поезда и ориентацию (т.е. какой конец вагона - «A» или «B» - обращен в сторону головы состава (109) поезда) указанных вагонов в составе (109) поезда.
Валидация состава (109) поезда осуществляется путем объединения данных GPS о местонахождении, скорости и ориентации, полученных датчиками GPS каждой ячеистой вагонной сети (105), такими как датчики, предусмотренные во всех блоках БУС (101), которые установлены на каждом железнодорожном вагоне (103), и дополнительно одним или несколькими следующими способами:
1) путем создания динамических геозон, где геозона представляет собой физическую зону произвольной формы, заданную координатами GPS;
2) посредством отслеживания одновременных ударных воздействий по акселерометру, установленному в блоке БУС (101) на «ударяющем» вагоне (103) и «ударяемом» вагоне (103);
3) по показателю уровня мощности принимаемого сигнала (RSSI) между устройствами, установленными на отдельных вагонах;
4) с помощью датчика движения, который установлен в блоке БУС (101) и предназначен для фиксации движения или его отсутствия;
5) с помощью считывателя (127) меток автоматической идентификации оборудования (AEI) или активной метки радиочастотной идентификации (RFID), где блок БУС (101) снабжен RFID-ридером, который подтверждает получение сигнала активной RFID-метки;
6) с помощью блока БУС (101), установленного на железнодорожном вагоне (103), который активно ищет и распознает источник возможного подключения, передающий идентификатор ИПС (113);
7) с помощью блока БСБ (104), снабженного датчиком локальной информации или бесконтактным датчиком приближения;
8) с помощью блока БУС (101), установленного на железнодорожном вагоне (103), который реагирует на одну или несколько ближайших ячеистых поездных сетей (107); или
9) с помощью блоков БСБ (104), установленных на напорных трубопроводах тормозной системы железнодорожного вагона (103) для отслеживания сброса давления и последующей передачи соответствующего сообщения в блок БУС (101), установленный на вагоне (103).
Например, система может использовать имеющийся считыватель (127) меток автоматической идентификации оборудования (AEI), который использует RFID для считывания информации с метки AEI, закрепленной на железнодорожном вагоне (103). Считыватели (127) меток AEI предусмотрены на выходе из депо (114), где они установлены в фиксированных точках. Считыватели (127) меток AEI используют частоту возбуждения в диапазоне 902-915 МГц. В нормальном режиме работы сигнал возбуждения используется только для запитывания метки AEI, закрепленной на железнодорожном вагоне (103), и выработки электроэнергии для обратного рассеяния сигнала, который содержит идентификатор метки и другую информацию, запрограммированную в метке AEI. Блок БУС (101) содержит радиочастотный датчик (РЧ-датчик), настроенный на диапазон частот 901-915 МГц. При выходе состава (109) поезда из депо (114) он проходит мимо активного считывателя (127) меток AEI. Радиочастотный датчик в блоке БУС (101) распознает сигнал возбуждения со считывателя (127) меток AEI. Блок БУС (101) обрабатывает данные о местонахождении согласно сигналу считывателя меток, после чего генерирует сообщение о событии. Сообщение о событии передается из блока БУС (101) в шлюз ПБШ (102), установленный на локомотиве (108) состава (109) поезда, по ячеистой поездной сети (107). Ячеистая поездная сеть (017) анализирует временные характеристики сообщений о событии, полученных с каждого блока БУС (101), установленного на железнодорожном вагоне (103), когда тот проходит мимо активного считывателя (127) меток AEI. По этим данным ячеистая поездная сеть (107) может определить порядок расположения и ориентацию железнодорожных вагонов (103) в составе (109) поезда, так как в предпочтительном варианте блок БУС (101) устанавливается на известном конце (например, на конце «B») железнодорожного вагона (103).
Блок БУС (101), установленный на каждом железнодорожном вагоне (103), осуществляет передачу данных в шлюз ПБШ (102) на хосте (например, на локомотиве (108)), который непрерывно передает идентификаторы ИРС (112) и ИПС (113). Приблизительное физическое местонахождение вагона (103) можно узнать по его положению на двумерной сетке или с помощью системы GPS, установленной на железнодорожном вагоне (103).
При использовании только двумерной или трехмерной сетки для определения местонахождения железнодорожного вагона (103) может иметь место погрешность позиционирования, в результате чего вагон (103) может оказаться не на том пути. Для устранения этой погрешности может быть применен дополнительный способ валидации местонахождения железнодорожного вагона (103) по механическому соединению, Механическое соединение подтверждается мониторингом ускорений, указывающих на сцепление вагонов (103), с использованием блоков БСБ (104) и БУС (101), установленных на сцепляемых соседних вагонах (103). Эти ускорения синхронизированы с временной меткой, которая дает сетевое время, дату и местонахождение по GPS. Сетевое время характеризуется точностью до миллисекунды.
Блок БУС (101) анализирует ускорения, полученные со своего акселерометра. После определения ускорения, указывающего на сцепление железнодорожных вагонов (103), блок БУС (101) передает в шлюз ПБШ (116), установленный в депо (114), сигнал тревоги через идентификатор ИРС (112); или же, если железнодорожным вагонам (103) и локомотиву (108) был назначен идентификатор ИПС (113), сигнал тревоги может быть также передан по ячеистой поездной сети (107) с идентификатором ИПС (113). Сигнал тревоги посылается в том случае, если ускорения превышают заданное пороговое значение, содержащее временную метку с датой, временем и местонахождением. Сигнал тревоги передается в шлюз ПБШ (116), установленный в депо (114); в шлюз ПБШ (102), установленный на локомотиве (108); а также непосредственно из блока БУС (101). Источник события ускорения может быть определен тогда, когда «ударяющий» вагон (103) (т.е. движущийся железнодорожный вагон (103)) оказывает ударное воздействие на «ударяемый» вагон (103) (т.е. неподвижный железнодорожный вагон (103)). Как хорошо известно любому специалисту в данной области техники, «ударяющий» вагон (103) представляет собой железнодорожный вагон (103), который ударяется о другой железнодорожный вагон (103), который называется «ударяемым» вагоном (103), для завершения операции сцепки. Ускорения, переданные блоками БУС (101) каждого железнодорожного вагона (103), анализируются с тем, чтобы можно было сделать вывод об успешном завершении сцепления «ударяющего» вагона (103) с «ударяемым» вагоном (103).
Последующие операции по сцепке могут быть использованы для подтверждения соединения между собой железнодорожных вагонов (103) и положения каждого из вагонов (103) в составе (109) поезда. Например, если проанализировать скорость звука в стали, которая составляет около 6000 м/с с разрешением 1 мс, можно предположить, что расстояние от конца железнодорожного вагона (103) длиной 20 метров до другого железнодорожного вагона (103) будет пройдено за 3 мс. Физическое положение железнодорожного вагона (103) в составе (109) поезда может быть дополнительно подтверждено использованием сетевого расположения или бортовой системы GPS.
Состав (109) поезда может быть проверен после прохождения каждого из вагонов (103) через то место, в котором установлен считыватель (127) меток автоматической идентификации оборудования (AEI). Когда железнодорожный вагон (103), снабженный пассивной RFID-меткой системы AEI, проходит мимо считывателя (127) меток AEI, генерируется сообщение, которое может относиться к другим железнодорожным вагонам (103) или локомотиву (108), проходящим через этот же считыватель (127) меток AEI.
Состав (109) поезда, в котором каждый вагон (103) снабжен блоком БУС (101) и в котором ведущий локомотив (108) снабжен шлюзом ПБШ (102), передающим идентификатор ИПС (113) каждому блоку БУС (101) в составе (109) поезда, может быть дополнительно проверен после выхода из депо (114). Все блоки БУС (101) в составе (109) поезда распознают идентификатор ИПС (113), передаваемый шлюзом ПБШ (102), который установлен на локомотиве (108); при этом, как было описано выше, все вместе указанные устройства образуют ячеистую поездную сеть (107). В ячеистой поездной сети (107) каждый блок БУС (101) и шлюз ПБШ (102) могут передавать данные в обоих направлениях.
Система может также осуществлять валидацию состава (109) поезда путем сравнения каждого блока БУС (101) железнодорожного вагона (103), привязанного к идентификатору ИПС (113), с перечнем всех вагонов (103) и соответствующих блоков БУС (101), назначенных и переданных пользовательским интерфейсом или центром (120) дистанционного управления железнодорожными перевозками.
Система может также осуществлять валидацию состава (109) поезда, используя хвостовое устройство, спаренное со шлюзом ПБШ (102), который установлен на ведущем локомотиве (108).
Система может также осуществлять валидацию состава (109) поезда по длине всего указанного состава, переданным идентификационным меткам железнодорожных вагонов (103) и переданной длине железнодорожных вагонов (103).
Если железнодорожный вагон (103) входит в состав (109) поезда, но не привязан к идентификатору ИПС (113), который передается шлюзом ПБШ (102), установленным на ведущем локомотиве (108), то шлюз ПБШ (116), установленный в депо (114), передаст сообщение о событии, предписывающее блоку БУС (101), установленному в вагоне (103), в котором наблюдается такой сбой, перейти с идентификатора ИРС (112) на известный идентификатор ИПС (113), назначенный составу (109) поезда. В том случае, если идентификатор ИПС (113) состава (109) поезда неизвестен, шлюз ПБШ (116) будет стараться перехватить объявления окружающей сети, содержащие идентификатор ИПС (113) состава (109) поезда; или же шлюз ПБШ (116) передаст сообщение о событии, предписывающее блоку БУС (101), установленному в вагоне (103), в котором наблюдается такой сбой, попытаться перехватить объявления окружающей сети, содержащие идентификатор ИПС (113) указанного состава (109) поезда. После распознавания идентификатора ИПС (113) состава (109) поезда, к которому привязан сбойный блок БУС (101), указанный блок БУС (101) автоматически переключится на этот идентификатор ИПС (113) состава (109) поезда. После переключения блока БУС (101) на идентификатор ИПС (113) состава (109) поезда сопряжение сбойного блока БУС (101) с составом (109) поезда с идентификатором ИПС (113) должно быть проверено на корректность идентификатора ИПС (113) одним или несколькими способами, описанными выше в текущем подразделе «Валидация состава поезда». Может быть также сгенерирован сигнал тревоги для оповещения машиниста о том, что в состав (109) поезда входит вагон (103), в котором наблюдается сбой.
«Молчащие» железнодорожные вагоны
Блок БУС (101) на «молчащем» железнодорожном вагоне (103) работает в гибком режиме с пониженной нагрузкой или экономном режиме включения/выключения питания; при этом он осуществляет прослушивание в течение достаточно долгого времени, чтобы перехватить передачу со шлюза ПБШ (102), установленного на локомотиве (108), во время прохода указанного локомотива мимо «молчащего» вагона (103). «Молчащий» вагон (103) может находиться в депо (114), на боковом пути или в тупике. Шлюз ПБШ (102) локомотива характеризуется наличием источника питания; таким образом, он может находиться в режиме постоянного беспорядочного прослушивания (это означает, что он будет пытаться подключиться в любой сети), осуществляя поиск «молчащего» вагона (103), к которому следует подключиться (т.е. занимаясь пассивным прослушиванием сети).
Когда локомотив (108), снабженный шлюзом ПБШ (102), проходит мимо «молчащего» вагона (103), а блок БУС (101) на указанном «молчащем» вагоне (103) передает сообщение о своем присутствии в шлюз ПБШ (102), установленный на локомотиве (108), шлюз ПБШ (102) регистрирует текущее местонахождение «молчащего» вагона (103) и впоследствии передает эту информацию в центр (120) дистанционного управления железнодорожными перевозками.
Блок БУС (101), установленный на «молчащем» вагоне (103), характеризуется тремя режимами прослушивания: 1) Блок БУС (101) осуществляет прослушивание в течение определенной процентной доли времени или рабочего цикла для подключения к сети с идентификатором ИПС (113); 2) Блок БУС (101) осуществляет прослушивание в течение определенной процентной доли времени для подключения к сети с идентификатором ИРС (112); и 3) Блок БУС (101) осуществляет прослушивание в течение определенной процентной доли времени для подключения к любой сети.
Система согласно настоящему изобретению исходит из того, что каждый железнодорожный вагон (103) в составе (109) поезда снабжен блоком БУС (101) и что каждый локомотив (108) снабжен шлюзом ПБШ (102); однако система допускает возможность, что не все железнодорожные вагоны (103) будут снабжены блоками БУС (101). В таких случаях все вычисления, касающиеся валидации состава (109) поезда, корректируются с тем, чтобы принять в расчет тот факт, что подключенные железнодорожные вагоны (103) могут не соседствовать друг с другом, а быть разделены одним или несколькими неподключенными вагонами (103).
Платформа обработки данных
Платформа обработки данных отвечает за реализацию встроенных вычислительных средств, используемых для выведения заключений по данным, полученным с блоков БСБ (104), блоков БУС (101) и шлюзов ПБШ (102). В предпочтительном варианте платформа обработки данных распределена по всем блокам БСБ (104), блокам БУС (101) и шлюзам ПБШ (102) на локомотиве и шлюзам ПБШ (116), установленным в депо (114). Она также использует облачную инфраструктуру, оптимизированную под работу в тесном взаимодействии с ячеистой поездной сетью (107) и ячеистой вагонной сетью (105) во взаимодействии с различными потоками данных, поступающими от сторонних провайдеров или внешних источников.
В предпочтительном варианте платформа обработки данных характеризуется расширяемой архитектурой, использующей модуль распределенной обработки сложных событий (DCEP), который может быть масштабирован для поддержки миллионов отдельных элементов поездных систем в глобальной сети. Модуль DCEP передает функцию принятия решений на самый нижний уровень во избежание чрезмерного потребления мощности и использования полосы частот, которая может понадобиться для передачи больших объемов данных от поездного аппаратного оборудования в облачную систему обработки данных.
Если модуль DCEP используется совместно с блоком БУС (101) или БСБ (104) со встроенным программным обеспечением, то платформа обладает возможностью фильтрации и исполнения миллионов событий в секунду в реальном масштабе времени.
В каждый блок БУС (101) и/или БСБ (104) встроено специальное программное обеспечение для обнаружения событий в реальном масштабе времени на основе собранных данных
Модуль DCEP агрегирует потоки данных, такие как события и метаданные, через адаптеры обработки потоков данных из различных источников для включения пользовательских данных, данных об окружающей среде, а также данных с блоков БУС (101) и БСБ (104). Модуль DCEP содержит адаптеры обработки потоков данных, блок временного анализа, блок пространственного анализа, процессор правил и публикатор.
Блок временного анализа обрабатывает данные для определения изменений значений в динамике по времени. Например, блок БСБ (104) измеряет температуру подшипника. Указанный временной блок зафиксирует изменение показаний температуры за определенный период времени, что даст возможность провести последующий анализ, например, анализ трендов.
Блок пространственного анализа обрабатывает данные для определения относительного положения объекта, в качестве которого в контексте настоящего изобретения выступает железнодорожный вагон (103). Положение железнодорожного вагона сравнивается с геозоной с тем, чтобы определить, находится ли он в пределах или за пределами геозоны, а затем сравнивается с маршрутной картой с тем, чтобы определить, не сошел ли объект с маршрута или не отклонился ли он от курса, или для определения иных параметров подобного рода. Кроме того, может быть проведен анализ по шлюзу ПБШ (102), установленному на локомотиве (108), или шлюзу ПБШ (116), предусмотренному в депо, который охватывает пространственные аспекты по множеству железнодорожных вагонов.
Процессор правил представляет собой модуль прикладных программ, в котором хранятся точные рабочие параметры с тем, чтобы при пересылке данных из временного и пространственного блоков в указанный модуль он мог сравнить эти данные с точными рабочими параметрами. По результатам этого сравнения только те данные, которые были признаны критическими, передаются в публикатор (откуда полученная информация перенаправляется в другую систему или иному пользователю). Процессор правил передает фильтры и логику источнику, в качестве которого может выступать блок БУС (101), блок БСБ (104) или шлюз ПБШ (102), где тот просматривает множество точек данных, сводя данные в практические события, такие как сигналы тревоги, отчеты и информационные панели.
Публикатор представляет собой модуль прикладных программ, который получает критические данные от составителя правил с целью формирования доступных для понимания сигналов тревоги, отчетов и информационных панелей для конечного пользователя или системы.
Сначала данные пропускаются через временной и пространственный блоки, после чего задействуется ряд фильтров процессора правил, где критические данные отделяются от некритических на основании заданного массива правил. Далее информация передается в публикатор или интеграционную платформу стороннего производителя, где могут отрабатываться оперативные решения, операции по планированию ресурсов предприятия (ERP), информационные панели и сигналы тревоги.
Например, блок БУС (101) устанавливается на железнодорожном вагоне (103) вместе с блоком БСБ (104), который монтируется на монтажной части подшипника каждого колеса и предназначен для измерения температуры подшипников. Блок БУС (101) передает данные о температуре, измеренной блоком БСБ (104) на каждом подшипнике, в интегрирующую хвостовую систему (облачную или на локальном сервере). Эти данные могут также называться потоком данных, поступающим с объекта или из парка транспортных средств. Одновременно с этим интегрирующая хвостовая система принимает поток данных из соответствующего источника со сведениями, содержащимися в грузовой накладной железнодорожного вагона (103), после чего в указанной системе эти данные объединяются с потоком данных об объекте, а затем обрабатываются по заданным правилам и пропускаются через фильтры событий. Данные, сгенерированные после обработки фильтрами, могут преобразовываться в информационное сообщение и одновременно передаваться в систему ERP конечного пользователя. Система ERP может затем обработать эти данные и передать результаты в такие инстанции, как управление эксплуатации железной дороги для принятия решений по последующим действиям.
В другом примере один или несколько шлюзов ПБШ (116) установлены в депо (114). Шлюзы ПБШ (116) собирают данные с железнодорожных вагонов (103), снабженных блоком БУС (101) и одним или несколькими блоками БСБ (104), как это описано выше.
Интерфейс API предлагает способы управления железнодорожными вагонами (103), локомотивами (108) и составами (109) поездов в пределах и за пределами депо (114), где вагоны (103) и локомотивы (108) управляются железнодорожным или иным персоналом.
Способы API раскрыты в виде веб-сервисов, использующих защищенный протокол HTTP для передачи данных по SSL или непосредственно в систему через библиотеку приложений. Доступ к командам и функционалу осуществляется через шлюз ПБШ, установленный на локомотиве (108), с помощью проводного сетевого соединения или беспроводным способом из депо (114). Аналогичный API и функционал предусмотрены в шлюзе ПБШ (116) депо для обеспечения большей гибкости системы. Эта гибкость требуется для того, чтобы при необходимости шлюзом ПБШ (116) депо и шлюзом ПБШ (102), установленным на локомотиве (108), можно было управлять из одного центра, такого как центр (120) дистанционного управления железнодорожными перевозками.
Следует иметь в виду, что выше описаны новые системы, устройства и способы. Следует также понимать, что настоящее изобретение не ограничено вариантами его осуществления, описанными и проиллюстрированными выше, а включает в себя весь объем, который определяется формулой изобретения, прилагаемой к настоящему документу.
Реферат
Техническое решение относится к области железнодорожной автоматики для управления железнодорожным депо. Система управления депо для управления железнодорожными вагонами, покрытыми ячеистой вагонной сетью, и составами поездов, покрытыми ячеистой поездной сетью, содержит ячеистую сеть депо с одним или несколькими приводными беспроводными шлюзами, размещенными в указанном депо в качестве сетевых узлов; при этом указанная система выполнена с возможностью выполнения следующих функций: (a) логического формирования составов поездов; (b) валидации сформированных составов поездов; и (c) логического роспуска составов поездов. Достигается повышение надежности управления железнодорожным депо. 2 н. и 14 з.п. ф-лы, 5 ил.
Комментарии