Генератор псевдослучайной шумовой последовательности с быстрым подведением - RU2235436C2
Код документа: RU2235436C2
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к области связи. В частности, настоящее изобретение относится к новым усовершенствованным способу и устройству для формирования псевдослучайной шумовой (ПШ) последовательности с возможностью быстрого подведения от одного сдвига к другому.
Уровень техники
Псевдослучайные шумовые (ПШ) последовательности обычно применяются в системах связи с расширением спектра по методу прямой последовательности, например, описанных в стандарте IS-95 эфирного интерфейса и в его производных, таких как IS-95-A и ANSI-J-STD-008 (в дальнейшем упоминаемых вместе как стандарт IS-95), распространяемых Ассоциацией промышленности средств телекоммуникации (TIA) и используемых в основном в системах сотовой связи. Стандарт IS-95 содержит способы модуляции сигнала по принципу многостанционного доступа с кодовым разделением каналов (МДКР) для проведения множества сеансов связи одновременно в пределах одной и той же полосы радиочастот. В совокупности с комплексным управлением мощностью осуществление множества сеансов связи в пределах одной и той же полосы частот увеличивает общее количество вызовов и других видов связи, которые можно осуществлять в системе радиосвязи, за счет того, что помимо прочего, повышается повторное использование частоты по сравнению с другими методами беспроводной связи. Применение методов МДКР в системе многостанционного доступа описано в патенте США №4901307 на "Систему связи с расширением спектра с применением спутниковых или наземных ретрансляторов" и патенте США №5103459 на "Системы и способ формирования сигналов в спутниковой телефонной системе МДКР".
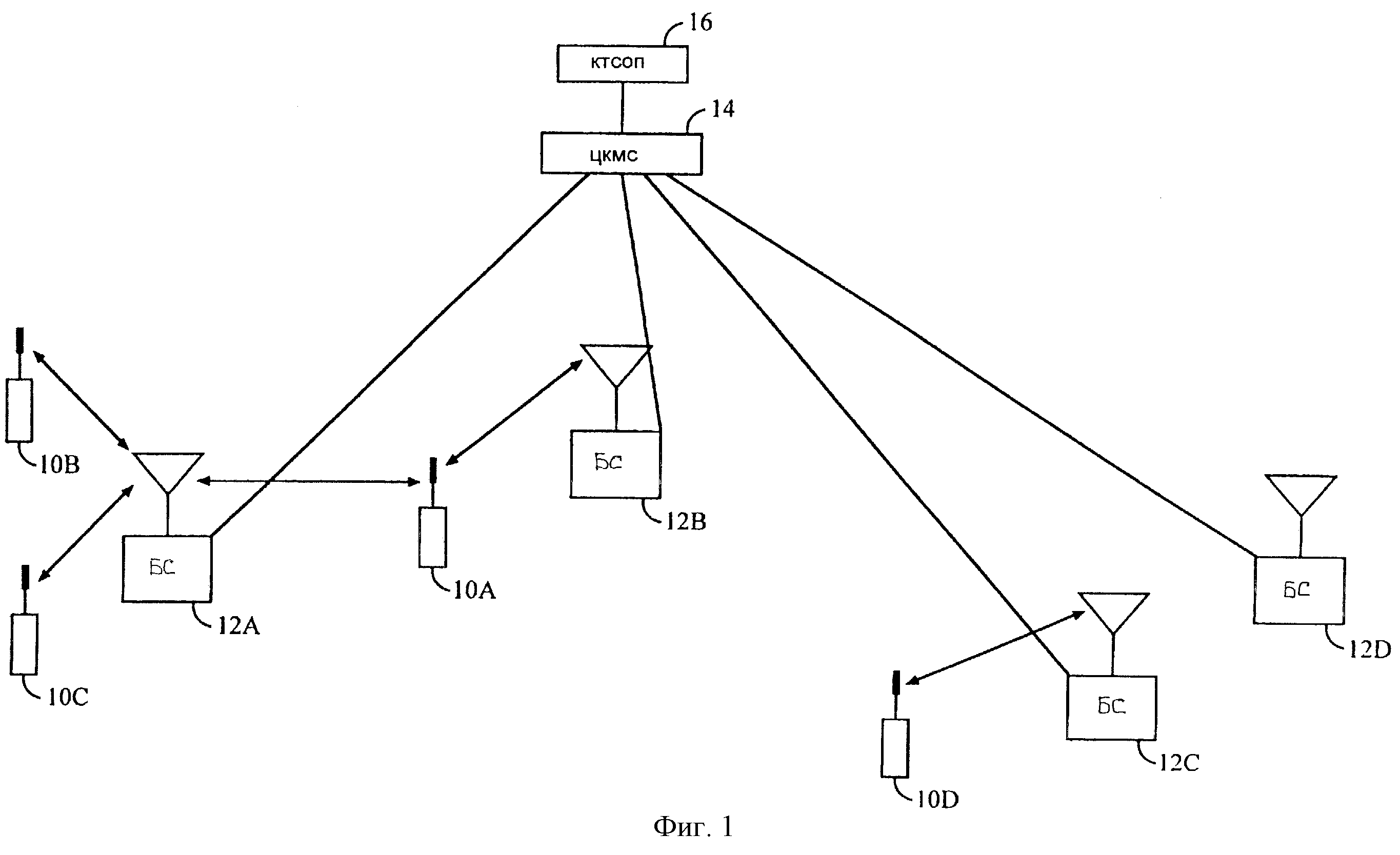
На фиг.1 представлена весьма упрощенная иллюстрация системы сотовой телефонной связи, построенной с применением стандарта IS-95. Во время работы группа абонентских аппаратов 10а-d осуществляет радиосвязь путем установления одного или нескольких радиочастотных РЧ интерфейсов с одной или несколькими базовыми станциями 12a-d, используя МДКР-модулированные радиосигналы. Каждый РЧ интерфейс между базовой станцией 12 и абонентским аппаратом 10 состоит из сигнала прямой линии связи, передаваемого с базовой станции 12, и сигнала обратной линии связи, передаваемого с абонентского аппарата. При использовании этих РЧ интерфейсов связь с другим пользователем обычно осуществляется через центр коммутации мобильной связи (ЦКМС) 14 и коммутируемую телефонную сеть общего пользования (КТСОП) 16. Линии связи между базовыми станциями 12, ЦКМС 14 и КТСОП 16 обычно устанавливаются через соединения проводных линий связи, хотя известно также применение дополнительных РВЧ или СВЧ линий связи.
Каждый абонентский аппарат 10 осуществляет связь с одной или несколькими базовыми станциями 12 с помощью рейк-приемника (RAKE). Рейк-приемник (RAKE) описан в патенте США №5109390 на "Приемник с разнесенным приемом в системе сотовой телефонной связи МДКР". Рейк-приемник обычно состоит из одного или нескольких искателей для обнаружения прямого и многолучевого пилот-сигнала от соседних базовых станций и двух или более указателей (отводов) для приема и объединения информационных сигналов от этих базовых станций. Искатели описаны в совместно рассматриваемой заявке США №08/316177 на "Многолучевой поисковый процессор для систем многостанционного доступа с расширением спектра", поданной 30 сентября 1994 г. Искатели и указатели должны быть способны формировать правильные ПШ последовательности, соответствующие ПШ последовательностям, формируемым на базовой станции. ПШ последовательности обычно формируются с помощью линейных сдвиговых регистров с обратной связью или ЛСРОС.
Характерным требованием для конструкции систем связи с расширением спектра по методу прямой последовательности является то, что приемник должен согласовывать свои ПШ последовательности с ПШ последовательностями базовой станции. Каждая базовая станция и абонентский аппарат используют точно одни и те же ПШ последовательности. Чтобы отличить себя от других базовых станций, базовая станция вводит индивидуальный сдвиг при формировании своих ПШ последовательностей. В системах IS-95 все базовые станции имеют сдвиг, равный целому числу, кратному 64 элементам сигнала. Абонентский аппарат осуществляет связь с базовой станцией путем выделения, по меньшей мере, одного указателя для этой базовой станции. Выделенный указатель должен вводить соответствующий сдвиг в свою ПШ последовательность, чтобы осуществлять связь с данной базовой станцией. Переход ЛСРОС от одного сдвига к другому называют подведением. Один способ подведения заключается во временном увеличении скорости изменения состояний ЛСРОС. Этот способ называют опережением, так как он переводит последовательность вперед относительно последовательности базовой станции. Другой способ подведения заключается во временном уменьшении скорости изменения состояний ЛСРОС. Этот способ называют запаздыванием, так как он переводит последовательность назад относительно последовательности базовой станции.
На фиг.2 изображена типичная известная конфигурация ЛСРОС. Элементы этой конфигурации входят в состав необходимых элементов типичного указателя или искателя. ЛСРОС 210 формирует сигнал ЛСРОС_СОСТОЯНИЕ, который содержит ПШ последовательность, необходимую для поиска или демодуляции (не показаны на схеме). В системах IS-95 требуется два ЛСРОС: один для канала I и один для канала Q. Каждый из этих ЛСРОС слегка отличается от стандартного ЛСРОС тем, что количество состояний увеличено от 215-1 до 215 за счет включения состояния, называемого состоянием-вставкой. Точный характер ПШ последовательности, формируемой ЛСРОС, определяется выбранным многочленом, что реализуется конфигурацией положений отводов. Внутренние операции ЛСРОС 210 не оказывают существенного влияния на функцию подведения. Для целей данного примера ЛСРОС 210 просто переходит из одного состояния в следующее в своей заданной последовательности каждый раз, когда выдается сигнал ЛСРОС _ВКЛ, и остается в своем текущем состоянии каждый раз, когда сигнал ЛСРОС_ВКЛ отсутствует.
Сигнал ЛСРОС_ВКЛ формируется блоком 200 управления подведением. Когда ЛСРОС не осуществляет подведение, сигнал ЛСРОС _ВКЛ будет активизироваться один раз за период элемента сигнала так, что ЛСРОС СОСТОЯНИЕ будет формировать новое состояние со скоростью элементов сигнала. Когда от управляющего микропроцессора, процессора цифровых сигналов (ПЦС) или отдельного аппаратного средства (не показано) поступает сигнал КОМАНДА_ПОДВЕДЕНИЯ, который означает, что необходимо изменить сдвиг, блок 200 управления подведением корректирует согласование во времени сигнала ЛСРОС_ВКЛ, чтобы осуществить изменение сдвига.
Сигнал ЛСРОС_ВКЛ также управляет счетчиком 220. Этот счетчик используется для отслеживания, в каком состоянии находится ЛСРОС, путем формирования индекса, который обозначен как ЛСРОС_СЧЕТ. Все эти элементы возвращаются в исходное состояние путем обычного сброса, который согласует ЛСРОС _СЧЕТ и ЛСРОС_СОСТОЯНИЕ в заданных положениях. Так как ЛСРОС_ВКЛ управляет и счетчиком 220 и ЛСРОС 210, и они оба либо вместе продвигаются вперед, либо не продвигаются вообще, ЛСРОС_СЧЕТ можно использовать для определения, где находится ЛСРОС _ВКЛ в данной ПШ последовательности.
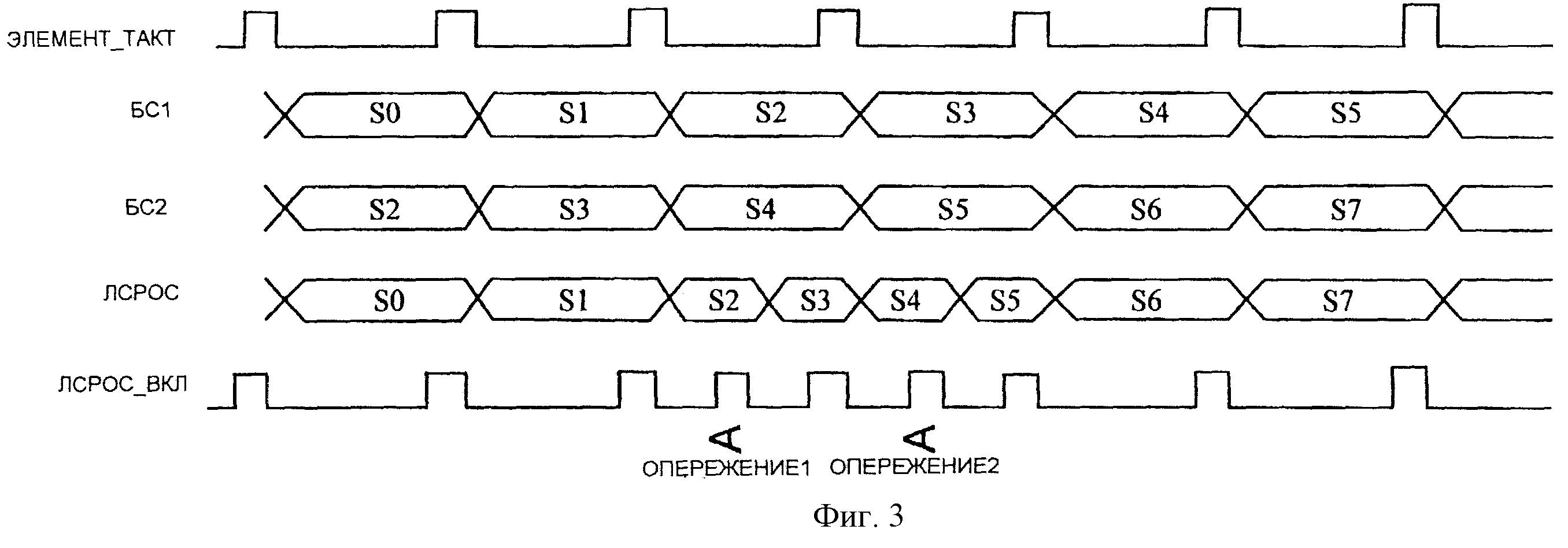
На фиг.3 показана принципиальная временная диаграмма, которая иллюстрирует подведение путем опережения. Сигнал ЭЛЕМЕНТ_ТАКТ показывает скорость элементов сигнала. Сигналы БС1 и БС2 представляют ПШ последовательности двух разных базовых станций. Каждая последовательность проходит через одинаковую последовательность состояний, обозначенных как S0, S1..., но как отмечалось выше, базовые станции различаются сдвигом между своими соответствующими ПШ последовательностями. Этот сдвиг, показанный в данном примере, составляет всего 2 элемента сигнала. Как отмечалось выше, базовые станции стандарта IS-95 всегда сдвинуты на целое число элементов сигнала, кратное 64. Выбор сдвигов не оказывает существенного влияния на выполнение подведения. Сигнал ЛСРОС представляет состояние ЛСРОС, которое будет существовать внутри указателя или искателя в абонентском аппарате. Этот сигнал показан изначально согласованным с БС1. При осуществлении связи (или поиске) БС1 сигнал ЛСРОС _ВКЛ будет вводиться один раз за период элемента сигнала, и ЛСРОС будет оставаться согласованным с БС1. В дальнейшем описании будет продемонстрировано, как можно подвести ЛСРОС к согласованию с БС2. Исходя из относительных положений ЛСРОС, БС1 и БС2, это будет достигнуто путем опережения на два элемента сигнала. Первое опережение обозначено как опережение 1. Когда ЛСРОС находится в S2, выполняется дополнительный ввод сигнала ЛСРОС _ВКЛ. В результате ЛСРОС переходит в S3, а БС1 все еще остается в S2. Затем приходит ожидаемый ЛСРОС_ВКЛ и переводит ЛСРОС в S4. При этом следует отметить, что БС2 находится в S5, а БС1 - в S3, так что ЛСРОС (а значит его указатель или искатель) не согласован ни с одной из этих базовых станций, а значит и не осуществляет связь ни с одной из них. Второе опережение, обозначенное как опережение2, происходит при дополнительном вводе сигнала ЛСРОС_ВКЛ, когда ЛСРОС находится в S4. Это вынуждает ЛСРОС перейти в S5, где он теперь будет согласован с БС2. Следующие вводы ЛСРОС_ВКЛ происходят со скоростью элементов сигнала, поэтому ЛСРОС сохраняет согласование с БС2.
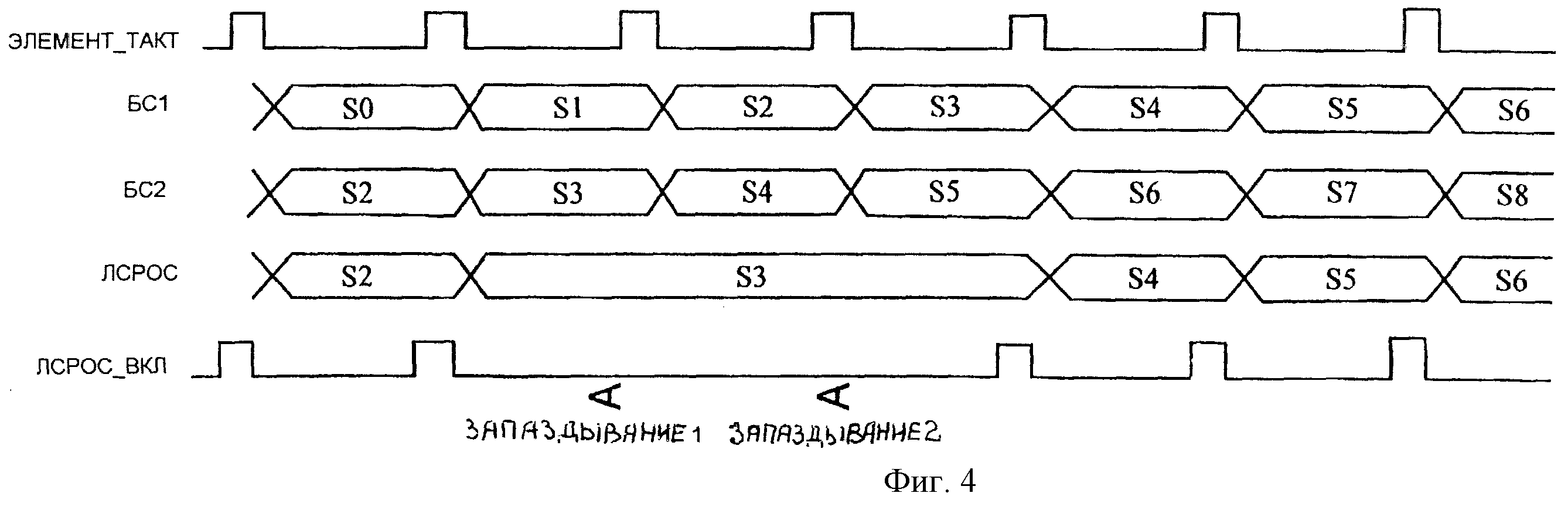
На фиг.4 показана принципиальная временная диаграмма, которая иллюстрирует подведение путем запаздывания. Показанные сигналы представляют те же самые сигналы и состояния, которые были описаны выше для опережения. Разница состоит в том, что ЛСРОС будет подводиться из согласования с БС2 к согласованию с БС1. Для этого потребуется запаздывание на 2 элемента. Вместо дополнительных вводов ЛСРОС_ВКЛ, которые увеличивают скорость изменения ЛСРОС (использованную для опережения), некоторые из вводов ЛСРОС_ВКЛ будут пропущены. Эти пропуски (показанные прочерками на местах пропуска вводов) обозначены как запаздывание1 и запаздывание2, и вынуждают ЛСРОС оставаться в S3, в то время как БС2 продолжает переходить через S4 в S5. Тем временем БС1 переходит из S1 в S3. Когда ЛСРОС_ВКЛ начнет вводиться снова с обычной скоростью элементов сигнала, ЛСРОС будет согласован с БС1.
В нормальных сеансах связи ЛСРОС в указателях должны выполнять подведение в нескольких ситуациях. Одна ситуация возникает, когда выполняется выделение указателя. Каждый указатель должен быть выделен для того положения, в котором искатель обнаружил пилот-сигнал. Короткие подведения могут выполняться, когда указатель, выделенный для многолучевого сигнала, переназначается более сильному ближайшему многолучевому сигналу. Однако обычно требуется выполнять подведения ЛСРОС для больших сдвигов. Указатели могут переназначаться от одной базовой станции соседним базовым станциям, расположенным с большими сдвигами относительно первой. После выхода абонента из режима сохранения энергии обычно требуется заново установить указатели. В большинстве ситуаций целесообразно минимизировать время, необходимое для подведения указателя, так как во время подведения указатель не может использоваться для связи. Приведенные выше примеры иллюстрируют возможность подведения путем опережения или запаздывания на один элемент сигнала за период элемента сигнала. Например, в стандарте IS-95 максимальное время, необходимое для подведения, составляет половину ПШ круга или 13,33 мс. Было бы целесообразно обеспечить более высокую скорость подведения указателей или искателей по разным причинам, включая те, которые были приведены выше.
Сущность изобретения
Предложены новые усовершенствованные способ и устройство для генератора псевдослучайной шумовой последовательности с быстрым подведением. Один или несколько загружаемых ПШ генераторов управляются ПЦС или микропроцессором вместе с автономным счетчиком, который ведет эталонный счет сдвигов. ПШ генератор обычно является частью указателя или искателя. ПЦС или микропроцессор может принимать участие в других функциях указателя или искателя, а также в функции подведения и может управлять одним или несколькими указателями и/или искателями. Каждый ПШ генератор состоит из загружаемого линейного сдвигового регистра с обратной связью (ЛСРОС) или его эквивалента, загружаемого счетчика для поддержания индекса состояния данного конкретного ПШ генератора и устройства управления подведением, выполненного с возможностью приема команды на подведение и управления ЛСРОС и счетчиком индексов для осуществления опережения или запаздывания на определенное расстояние сдвига.
Увеличение скорости осуществляется посредством управления ПЦС. В памяти хранится таблица состояний ЛСРОС и соответствующие номера индексов. Эти состояния ЛСРОС разделяют общее возможное количество возможных состояний. Целесообразно равномерно разнести хранимые состояния по ПШ кругу. ПЦС обеспечивает быстрое подведение за счет двухступенчатого процесса. Сначала ПШ генератор загружается таким образом, чтобы он "перескочил" к ближайшему состоянию с использованием таблицы, а затем используется блок управления подведением ПШ генератора для подведения на остальную часть пути.
Когда указатель необходимо подвести к определенному сдвигу, вычисляется положение, определяемое путем прибавления данного сдвига к текущему значению автономного эталонного счетчика. Из таблицы выбираются ближайшее положение и соответствующее состояние ЛСРОС. Одновременно данный индекс загружается в счетчик конкретного указателя, а состояние ЛСРОС загружается в ЛСРОС конкретного указателя. После того, как ЛСРОС и счетчик загрузились, они эффективно "перескакивают" в положение, очень близкое к выбранному из таблицы, при этом некоторая неточность обусловлена временем обработки, необходимым для выполнения этих операций. Затем ПЦС одновременно считывает значение счетчика ПШ генератора и значение автономного эталонного счетчика, чтобы определить новый текущий сдвиг. Текущий сдвиг вычитается из требуемого сдвига. Полученная разность определяет остаточную корректировку сдвига. Остаточная корректировка выполняется по команде на подведение, посланной в блок управления подведением ПШ генератора, которая вызывает опережение или запаздывание для подвода ПШ генератора точно к требуемому сдвигу.
Увеличение скорости пропорционально количеству ПШ состояний, хранимых в ПЦС. Время на подведение в любое положение (следует отметить, что предыдущее состояние ПШ генератора не используется) определяется общим количеством ПШ состояний, деленным на количество состояний, хранимых в ПЦС, и умноженным на скорость подведения блока управления подведением (если положения хранимых состояний разнесены равномерно).
Предложенный способ отличается от известного способа, в котором указатель прямо подводится от его текущего сдвига к требуемому новому сдвигу непосредственно по команде на подведение, поступившей в блок управления подведением. Поскольку типичные скорости подведения составляют порядка одного элемента сигнала на элемент сигнала для опережений и запаздываний, подведение на большое расстояние на ПШ круге заняло бы продолжительное время. В среднем, подведение составило бы половину ПШ круга. Поскольку обычно подведение может идти в любом направлении путем опережения или запаздывания, среднее подведение составляет _ ПШ круга, и поэтому соответствующее среднее время подведения будет равно количеству состояний, деленному на скорость подведения.
В данном примерном варианте реализации изобретения предусмотрено 215 возможных состояний. В ПЦС хранится 16 ПШ состояний и соответствующие значения индексов, которые равномерно разнесены по ПШ кругу (на расстояние 2048 элементов сигнала). Данный примерный ПШ генератор может осуществлять подведение со скоростью 7 элементов сигнала за время элемента сигнала при опережении или 1 элемент сигнала за время элемента сигнала при запаздывании. При этом максимальное время подведения составляет время 256 элементов сигнала плюс время, которое потребуется ПЦС, чтобы вызвать скачок. Любое положение в любом интервале из 2048 элементов сигнала можно достичь в пределах 256 элементов сигнала путем скачка в ближайшее хранимое положение перед ним и опережения со скоростью 7 элементов сигнала на элемент сигнала или скачка в ближайшее хранимое положение сзади него и запаздывания со скоростью 1 элемента сигнала на элемент сигнала. При увеличении хранимых состояний вдвое максимальный интервал подведения уменьшается до 1024 и также вдвое уменьшается максимальное время подведения (не принимая во внимание незначительное время на обработку в ПЦС).
Данный способ можно использовать для самых разных видов ПШ последовательностей. Можно предусмотреть пространство памяти в ПЦС в зависимости от требуемого увеличения скорости подведения. Описанные выше примерные варианты ЛСРОС, счетчика и блока управления подведением хорошо работают в данном изобретении, однако предложенный способ не ограничен данной конфигурацией. Любой загружаемый генератор последовательностей, связанный с устройством управления подведением, можно сконфигурировать в соответствии с настоящим изобретением.
Краткое описание чертежей
В дальнейшем существенные признаки, задачи и преимущества изобретения поясняются подробным описанием примеров его осуществления со ссылками на прилагаемые чертежи, на которых использованы одинаковые ссылочные обозначения и на которых
фиг.1 изображает структурную схему системы сотовой телефонной связи;
фиг.2 изображает структурную схему известного ПШ генератора;
фиг.3 изображает временную диаграмму, иллюстрирующую типичное опережение в ПШ генераторе;
фиг.4 изображает временную диаграмму, иллюстрирующую типичное запаздывание в ПШ генераторе;
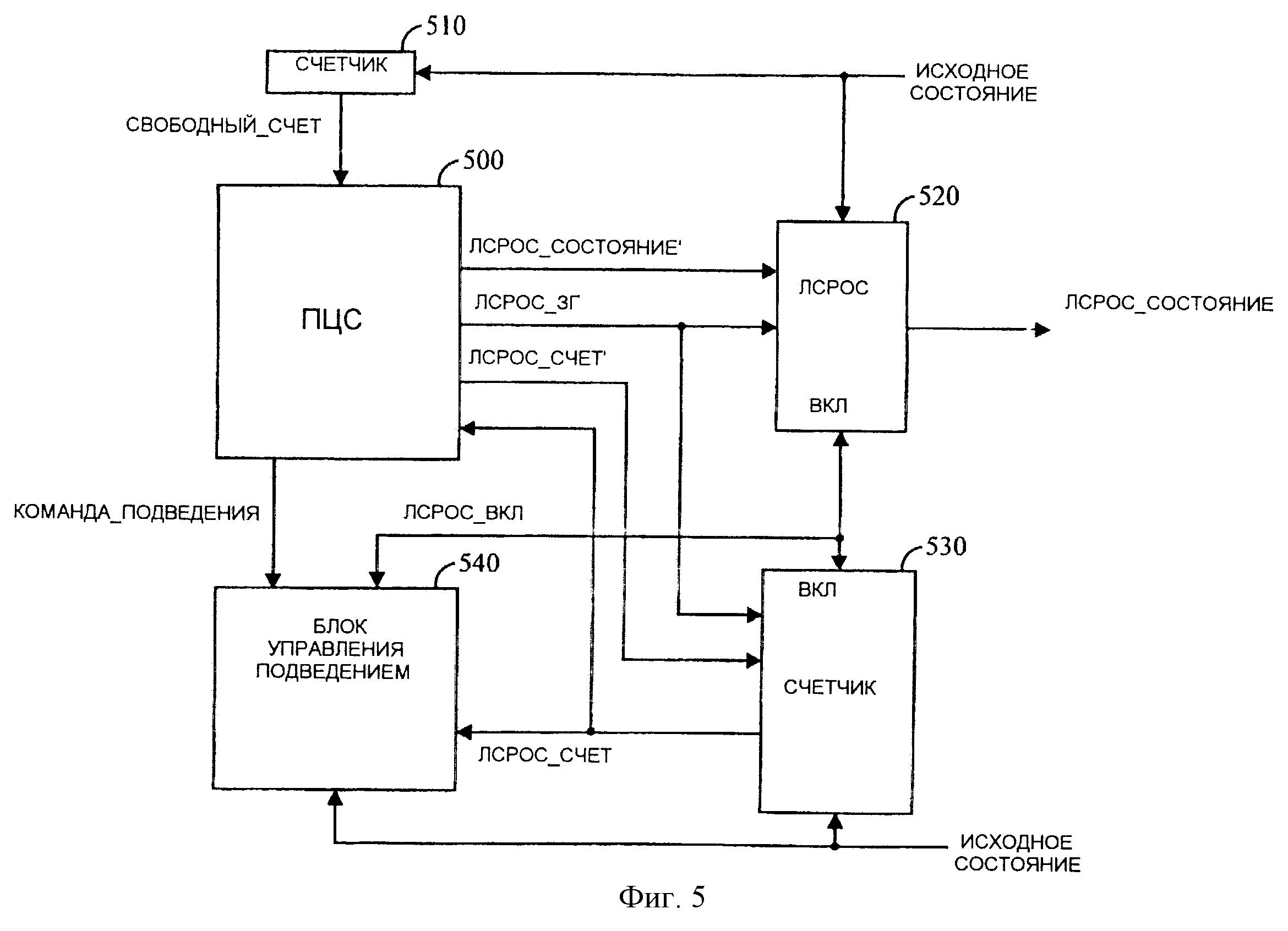
фиг.5 изображает структурную схему, выполненную в соответствии с примерным вариантом реализации изобретения;
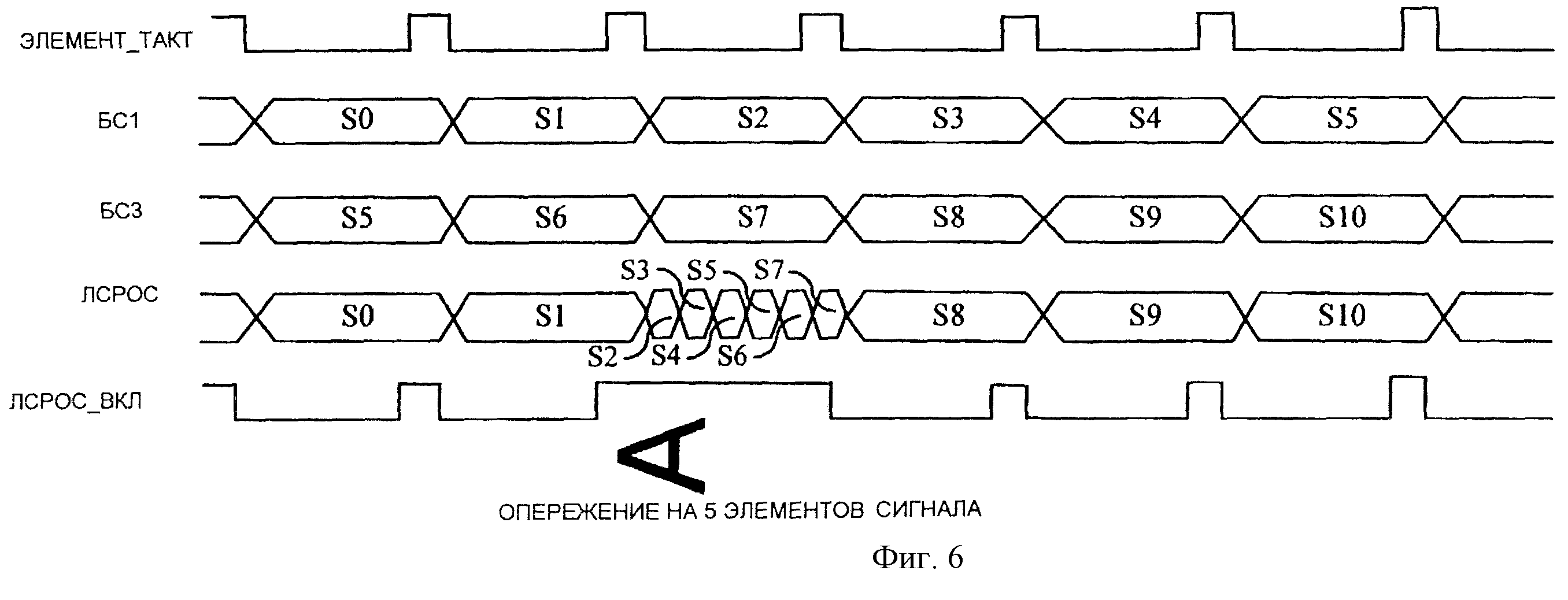
фиг.6 изображает временную диаграмму, иллюстрирующую более быстрое опережение в ПШ генераторе;
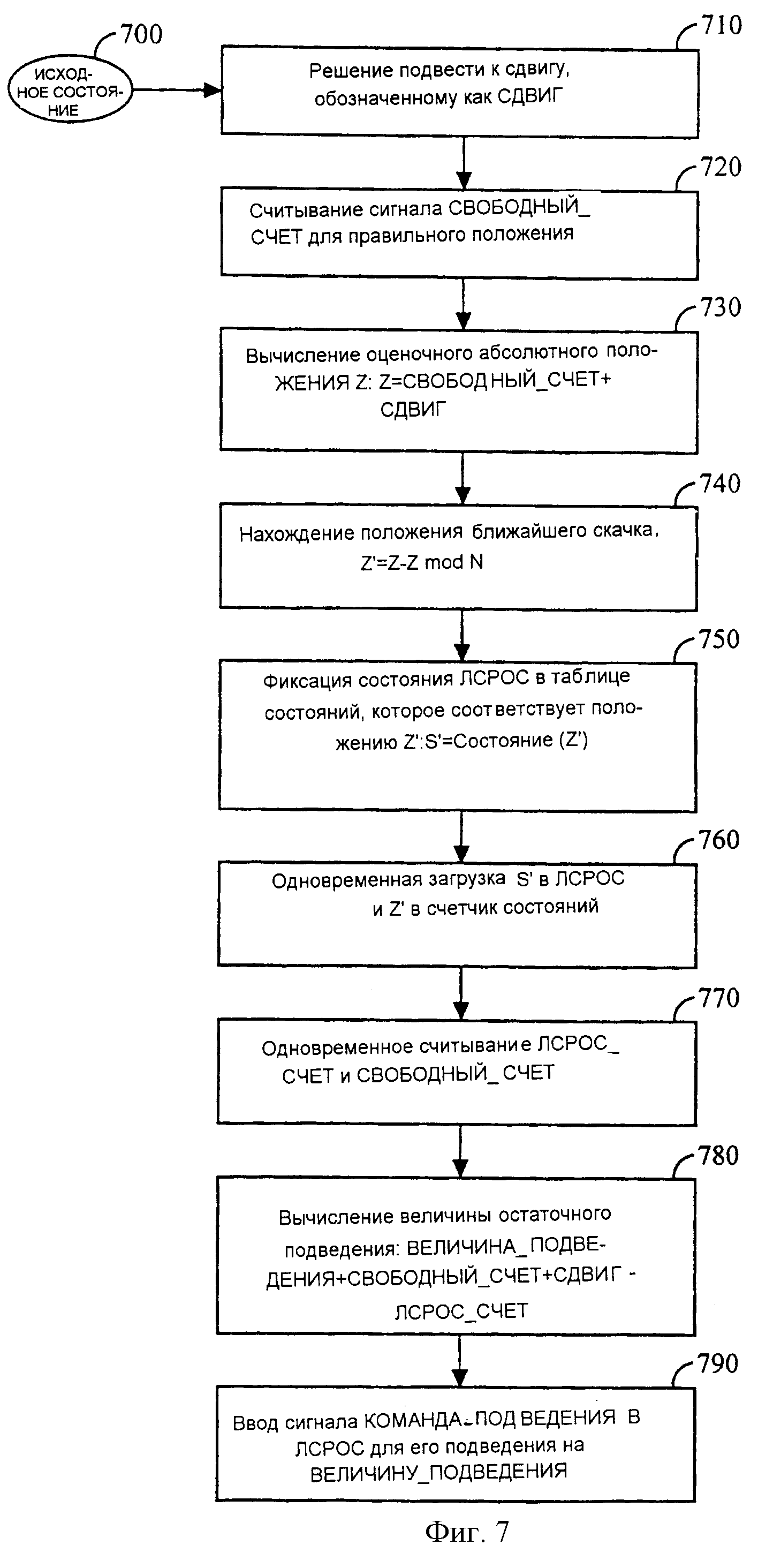
фиг.7 изображает алгоритм операций осуществления настоящего изобретения.
Подробное описание предпочтительных вариантов осуществления изобретения
На фиг.5 показана структурная схема согласно настоящему изобретению. ЛСРОС 520, счетчик 530 и блок 540 управления подведением представляют функции, относящиеся к данному изобретению, которые будут использоваться при ПШ формировании в указателе, искателе или комбинации указателя и искателя. Для описания настоящего изобретения нет необходимости описывать полностью указатель или искатель. В дальнейшем описании упоминаются только указатели, хотя специалистам в данной области техники будет ясно, что описанные способы формирования ПШ последовательности и подведения могут применяться как для указателей, так и для искателей. В данном примере осуществления изобретения эти элементы соединены с ПЦС 500. Для простоты и без ущерба для обобщения показаны элементы только одного указателя, но на практике к ПЦС 500 будет подсоединено несколько указателей. В данном примере предусмотрено четыре указателя. При этом ПЦС 500 кроме подведения используется вместе с указателями и искателями для выполнения частей их задач. Хотя это и не является обязательным, но если ПЦС уже подсоединен к указателям, настоящее изобретение может быть реализовано с более низкими дополнительными расходами. ПЦС 500 также подсоединен к счетчику 510. Этот счетчик не связан специально с каким-либо одним указателем, а используется в связи со всеми указателями. Требуется только один такой счетчик независимо от количества указателей.
После инициализации демодулятора, использующегося в данном изобретении, с помощью сигнала возврата в исходное состояние выходной сигнал ЛСРОС 520, ЛСРОС_СОСТОЯНИЕ, согласуется с соответствующим значением индекса, ЛСРОС_СЧЕТ, содержащимся в счетчике 530. Поскольку, как отмечалось выше, разные базовые станции изолированы друг от друга посредством индивидуальных сдвигов в общей ПШ последовательности, используемой совместно всеми устройствами, осуществляющими связь в системе МДКР, важно, чтобы было однозначное соответствие между сигналами ЛСРОС_СОСТОЯНИЕ и ЛСРОС_СЧЕТ. Тот же самый сигнал возврата в исходное состояние будет возвращать в исходное состояние счетчик 510, выходной сигнал которого, СВОБОДНЫЙ_СЧЕТ, будет использоваться как общий эталон. Сигнал возврата в исходное состояние используется также и для других целей инициализации. Например, им удобно производить возврат в исходное состояние блока 540 управления подведением.
Счетчик 510 будет служить в качестве эталона времени. Его выходной сигнал, СВОБОДНЫЙ_СЧЕТ, ведет счет среди количества состояний в данной ПШ последовательности (215 в данном примере) со скоростью одно состояние за период элемента сигнала. Следует отметить, что для данного счетчика не применяется сигнал включения, так как он действует автономно.
Сигнал СВОБОДНЫЙ_СЧЕТ не должен быть точно согласован с каким-либо конкретным счетчиком ПШ последовательностей в системе. Достаточно, чтобы СВОБОДНЫЙ_СЧЕТ обновлялся со скоростью один раз за элемент сигнала и поэтому сохранял постоянный сдвиг относительно системы в целом. После установления связи с какой-либо базовой станцией эта базовая станция может информировать абонентский аппарат, какой конкретный сдвиг используется ею при формировании ее ПШ последовательности. На основании этой информации можно вычислить разность между сигналом СВОБОДНЫЙ_СЧЕТ и действительной ПШ фазой системы и ввести ее как постоянный множитель в любые будущие вычисления сдвигов. СВОБОДНЫИ_СЧЕТ подается в ПЦС 500 для использования в таких вычислениях.
ЛСРОС 520 формирует выходной сигнал, ЛСРОС_СОСТОЯНИЕ, на основании которого можно сформировать ПШ последовательность для использования при демодуляции (не показано). В данном примере будут применяться два ЛСРОС: один для канала I и один для канала Q. Однако это не является обязательным требованием для реализации настоящего изобретения. ЛСРОС будет осуществлять опережение на одно состояние в ПШ последовательности один раз за время каждого тактового цикла, в котором активизирован ЛСРОС_ВКЛ. Соответственно, поскольку ЛСРОС_СЧЕТ служит в качестве индекса для сигнала ЛСРОС_СОСТОЯНИЕ, он будет обновляться для отражения текущего сигнала ЛСРОС_СОСТОЯНИЕ. ЛСРОС_ВКЛ формируется блоком 540 управления подведения. В установившемся состоянии ЛСРОС_ВКЛ будет вводиться один раз на каждый элемент сигнала, как было описано выше. ЛСРОС_ВКЛ можно вводить с более высокой скоростью, чтобы выполнить подведение путем опережения, или можно приостановить, чтобы выполнить подведение с запаздыванием. Блок 540 управления подведением формирует ЛСРОС_ВКЛ в соответствии с сигналом КОМАНДА_ПОДВЕДЕНИЯ, выданным ему ПЦС 500. КОМАНДА_ПОДВЕДЕНИЯ укажет блоку управления подведением, следует ли ему осуществлять опережение или запаздывание и на сколько элементов сигнала. На фиг.5 ЛСРОС_СЧЕТ изображен подающимся на блок 540 управления подведением. В некоторых вариантах реализации устройств управления подведением используется текущий индекс ЛСРОС. Однако это не является обязательным требованием. Осуществление настоящего изобретения не зависит от какого-либо одного конкретного выполнения блока управления подведением. Единственное требование заключается в том, чтобы ПЦС 500 мог выдавать сигнал КОМАНДА_ПОДВЕДЕНИЯ блоку 540 управления подведением и чтобы затем вводился соответствующий сдвиг в ЛСРОС_СОСТОЯНИЕ и соответствующий индекс ЛСРОС_СЧЕТ.
На фиг.6 изображена временная диаграмма более быстрого подведения путем опережения, чем описанное в известном аналоге. Как и в описании, касающемся фиг.3 и 4, БС1 и БСЗ представляют индекс ПШ последовательности, используемой двумя разными базовыми станциями при осуществлении связи с абонентским аппаратом, индекс ПШ последовательности которого показан посредством ЛСРОС. При этом следует отметить, что БСЗ имеет сдвиг на пять элементов относительно БС1. Тактовая частота управления ЛСРОС в шесть раз выше скорости элементов сигнала. (Этот пример приведен для демонстрации, в описываемом примере осуществления изобретения используется тактовая частота, в восемь раз превышающая скорость элементов сигнала, а согласно IS-95 все базовые станции разнесены на число, кратное 64 элементам сигнала). Изначально ЛСРОС согласован с БС1. Он осуществляет опережение в последовательности один раз за элемент сигнала, как показано, когда вводится ЛСРОС_ВКЛ. При такой конфигурации можно осуществлять максимальное опережение в размере пять элементов сигнала на элемент сигнала, как показано частью ЛСРОС_ВКЛ, обозначенной как "опережение на 5 элементов". Здесь ЛСРОС_ВКЛ вводится на весь период элемента сигнала. Состояние ЛСРОС приращивается один раз за тактовый цикл. При отсутствии подведения ЛСРОС будет обновляться один раз за период элемента сигнала, а в данном случае он обновляется шесть раз. Таким образом, ЛСРОС произвел опережение на пять сдвигов и теперь согласован с БС3. Обычно ЛСРОС, синхронизированный по скорости элементов сигнала, умноженной на некоторое целое число N, может осуществлять опережение со скоростью N-1 элементов сигнала за период элемента сигнала. В данном примерном варианте реализации изобретения возможны опережения на семь элементов сигнала за период элемента сигнала. Запаздывания же выполняются со скоростью один элемент сигнала за период элемента сигнала, как описано в связи с фиг.4 выше. Эти числа служат только для иллюстрации данного примера. Признаки изобретения не зависят от того, выполняет ли блок 540 управлением подведением более медленное или быстрое подведение в ответ на сигнал КОМАНДА_ПОДВЕДЕНИЯ от ПЦС 500, хотя максимальная скорость подведения в любое положение на ПШ круге будет зависеть от этих чисел.
ЛСРОС 520 также подсоединен к ПЦС 500 для загрузки некоторого значения, ЛСРОС_СОСТОЯНИЕ’, когда вводится сигнал загрузки, ЛСРОС_ЗГ. Аналогично ЛСРОС_ЗГ подается на счетчик 530 для загрузки значения, ЛСРОС_СЧЕТ’, в счетчик 530. Следует отметить, что выходной сигнал счетчика 530, ЛСРОС_СЧЕТ, который является значением индекса ЛСРОС_СОСТОЯНИЕ, также вводится в ПЦС 500. ЛСРОС_СОСТОЯНИЕ не требуется для ПЦС 500, так как информация о его положении содержится в сигнале ЛСРОС_СЧЕТ, и принимаются меры, гарантирующие сохранение правильного согласования сигналов ЛСРОС_СОСТОЯНИЕ и ЛСРОС_СЧЕТ. В известных счетчиках и ЛСРОС, описанных выше, возможность загрузки не требуется. Достаточно простого возврата в исходное состояние, который их согласует, и подведение осуществляется блоком управления подведением подобным блоку 540 управления подведением, который может корректировать их сдвиги в любое произвольное положение. Однако, как отмечалось выше, подведение в любое произвольное положение на ПШ круге может занимать значительное количество времени.
Конфигурация ПЦС 500, ЛСРОС 520, счетчика 530 и блока 540 управления подведением, показанная на фиг.5, не исключает использования описанного выше известного подведения со скоростью один элемент сигнала за элемент сигнала. Однако за счет использования признака загрузки ЛСРОС 520 и счетчика 530 вместе со счетчиком 510 и некоторыми дополнительными операциями, выполняемыми в ПЦС 500, можно существенно улучшить время подведения. Общее описание процедуры быстрого подведения приведено в разделе Сущность изобретения. На фиг.7 показан алгоритм выполнения операций для осуществления быстрого подведения. Эти операции подробно описаны ниже.
Процедура начинается в блоке 700 возврата в исходное состояние для согласования сигналов ЛСРОС_СОСТОЯНИЕ и ЛСРОС_СЧЕТ и установки сигнала СВОБОДНЫЙ_СЧЕТ в его исходное значение. При этом не имеет значения, согласованы ли СВОБОДНЫЙ_СЧЕТ и ЛСРОС_СЧЕТ после инициализации. Следует помнить, что в данном примерном варианте реализации изобретения будет множество указателей, и следующие операции можно выполнять с любым из числа имеющихся указателей. Для простоты при описании следующих операций все ссылки относятся к тому указателю, который является целью подведения.
В блоке 710 принимается решение подвести указатель к какому-то сдвигу, обозначенному как СДВИГ. Этот сдвиг вычисляется на основе локального сдвига, определенного сигналом СВОБОДНЫЙ_СЧЕТ. Существует ряд причин для подведения указателя. Может иметь место ситуация, когда абонентский аппарат пытается осуществить захват сигнала, то есть в текущий момент не находится на связи с базовой станцией. В результате поиска по всему ПШ кругу или его части возвращаются определенные возможные сдвиги, среди которых потенциально находятся базовые станции. В этом случае сдвиг можно вычислить из значений счетчика индексов в счетчике и сигнала СВОБОДНЫЙ_СЧЕТ. Полученная разность определяет СДВИГ'. Возможно мобильный абонентский аппарат осуществляет связь с базовой станцией, которая дает положения сдвига для соседних базовых станций. В этом случае данная базовая станция может дать сдвиг относительно всей системы, который может быть согласован или не согласован с сигналом СВОБОДНЫЙ_СЧЕТ, как было описано выше. Правильный сдвиг можно вычислить путем сравнения системного сдвига базовой станции и сравнения его с разностью между сигналами СВОБОДНЫЙ_СЧЕТ и ЛСРОС_СЧЕТ указателя, осуществляющего связь с данной базовой станцией. Для целей настоящего описания СДВИГ вычисляется относительно эталона времени абонентского аппарата, содержащегося в сигнале СВОБОДНЫЙ_СЧЕТ.
В блоке 720 считывается значение сигнала СВОБОДНЫЙ_СЧЕТ. СВОБОДНЫЙ СЧЕТ является выходным сигналом счетчика 510, который хранит эталонный индекс, циклически проходящий через общее количество ПШ состояний (215 в данном примерном варианте). Так как счетчик обновляется один раз за период элемента сигнала, а период элемента сигнала известен, выходной сигнал счетчика можно также использовать как эталон времени. Для ПЦС 500 необходима фиксация текущего положения. Детали реализации того, как передать данные сигнала СВОБОДНЫЙ_СЧЕТ в ПЦС 500, будут зависеть от того, какой тип ПЦС используется, и от ширины шины, через которую он осуществляет связь. В обстоятельствах, когда требуется выполнять множество считываний для передачи всех разрядов сигнала СВОБОДНЫЙ_СЧЕТ в ПЦС, специалистам в данной области техники известно множество путей решения этой задачи без сопутствующего изменения в сигнале СВОБОДНЫЙ_СЧЕТ, разрушающего данные. Один способ заключается в захвате значения в регистре, которое не обновляется до тех пор, пока не закончится считывание. Это позволяет беспрепятственно продолжать СВОБОДНЫЙ_СЧЕТ, как того требует изобретение. Тот факт, что данная фиксация может быть слегка устаревшей, когда она поступит в ПЦС 500, не имеет особого значения.
В блоке 730 ПЦС 500 вычисляет оценочное требуемое положение, Z, которое, будучи загруженным в счетчик 530, приведет к его сдвигу, обозначенному как СДВИГ, на основании сигнала СВОБОДНЫЙ_СЧЕТ:Z=СВОБОДНЫЙ_СЧЕТ+СДВИГ.
Затем в блоке 740 ПЦС 500 вычисляет положение ближайшего скачка, Z’. Это положение скачка следует выбирать из таблицы значений, хранимой в памяти ПЦС. Таблица будет содержать значения индексов для загрузки в счетчик 530 и соответствующие состояния ЛСРОС для загрузки в ЛСРОС 520. После загрузки этих значений ЛСРОС эффективно "перескочит" в данное состояние. Скачок по сути является мгновенным подведением, но он отличается от того вида подведения, которое выполняется блоком 540 управления подведением, поэтому здесь используется другой термин.
Обычно целесообразно выбирать такие положения скачков, которые обеспечат кратчайшее время максимального подведения, соответствующего выбору положений, равномерно разнесенных вокруг ПШ круга. Можно выбирать и другие положения скачков, при этом время максимального подведения будет зависеть от наибольшего расстояния на ПШ круге между двумя хранимыми положениями скачка. Для определенных распределений действительных сдвигов базовых станций в системе такой тип разнесения, хотя и увеличивает время максимального подведения, может уменьшить среднее время подведения. Можно предусмотреть огромное разнообразие видов разнесения, которые подпадают под объем изобретения.
Другим фактором является компромисс между требованиями к хранению в памяти и скоростью подведения. Как будет ясно из следующих операций, если хранить в памяти все состояния, то подведение в любое положение может быть действительно мгновенным. Хранение всего двух состояний сократит максимальное время подведения вдвое. Хранение четырех состояний сократит время подведения в 4 раза и т.д. Как отмечалось выше, в данном примерном варианте реализации изобретения в таблице хранится 16 состояний, равномерно разнесенных на 2048 элементов сигнала по ПШ кругу, состоящему из 215 элементов сигнала.
Для определения ближайшего оптимального положения скачка необходимо знать скорости подведения путем опережения и запаздывания блоком 540
управления подведением. Если, например, скорость подведения как путем опережения, так и путем запаздывания составляет один элемент сигнала за время элемента сигнала, то Z’ можно вычислить просто путем
округления до ближайшего положения скачка. Затем можно выдать команду на подведение путем запаздывания, если Z
В блоке 750 ПЦС 500 находит в таблице состояние ЛСРОС, S’, которое соответствует значению индекса, определенному положением скачка Z’:S’= Состояние (Z’), где Состояние представляет таблицу состояний, содержащую состояния ЛСРОС, помеченные индексами положения скачка.
В блоке 760 ПЦС 500 вводит S’ в сигнал ЛСРОС_СОСТОЯНИЕ’ и Z’ в ЛСРОС_СЧЕТ’ и одновременно загружает их в ЛСРОС 520 и счетчик 530 путем ввода сигнала ЛСРОС_ЗГ. Проблемы записи сигналов ЛСРОС_СОСТОЯНИЕ и ЛСРОС_СЧЕТ на шине, имеющей меньшую ширину в разрядах, чем СВОБОДНЫЙ_СЧЕТ, аналогичны проблемам, связанным со считыванием сигнала СВОБОДНЫЙ_СЧЕТ. Известно несколько путей решения этих проблем. Одной из альтернатив является отключение счетчика и ЛСРОС, пока идет загрузка в банк разных частей. Другой альтернативой является загрузка банка регистра, а затем загрузка счетчика 530 и ЛСРОС 520. Детали реализации не имеют значения - все что требуется, это чтобы после завершения операции загрузки сигналы ЛСРОС_СОСТОЯНИЕ и ЛСРОС_СЧЕТ были правильно согласованы. Следует помнить, что ЛСРОС_СЧЕТ является только индексом, который идентифицирует порядковыми числами состояния, через которые циклически проходит ЛСРОС_СОСТОЯНИЕ. Обязательным является то, чтобы ЛСРОС_СЧЕТ было точным эталоном для сигнала ЛСРОС_СОСТОЯНИЕ. Это требование сможет легко удовлетворить любой специалист в данной области техники.
Теперь перейдем к блоку 770. ПЦС 500 одновременно считывает ЛСРОС_СЧЕТ и СВОБОДНЫЙ_СЧЕТ. ПЦС 500 будет использовать эти значения для определения текущего сдвига, следующего за совершенным скачком. Важно, чтобы эти два значения выходного сигнала счетчика считывались одновременно. Типичным путем реализации этой задачи является загрузка этих двух значений в регистры в одном тактовом цикле, тогда ПЦС 500 сможет выполнить столько операций считывания, сколько потребуется для загрузки всех значений.
В блоке 780 ПЦС 500 вычисляет величину остаточного подведения: ВЕЛИЧИНА_ПОДВЕДЕНИЯ=СВОБОДНЫЙ СЧЕТ_+СДВИГ-ЛСРОС_СЧЕТ. Номинально величина остаточного подведения будет равна абсолютному положению Z минус ближайшее положение скачка Z’. Оно представляет собой величину подведения, не выполненного во время скачка. Кроме того, некоторое время было затрачено ПЦС 500 на выполнение описанных выше операций. В течение этого времени СВОБОДНЫЙ_СЧЕТ продвинулся вперед на некоторую величину, которая не была включена в исходное вычисление Z. В приведенном выше описании блока 740 обсуждались величины остаточного подведения на основании разных процедур выбора положения скачка. Хотя эти вычисленные значения остаточного подведения полезны для целей планирования, они не являются необходимыми для выполнения операций настоящего изобретения. Сигнал ВЕЛИЧИНА_ПОДВЕДЕНИЯ, вычисленный с новым считыванием сдвига между сигналами ЛСРОС_СЧЕТ и СВОБОДНЫЙ_СЧЕТ, содержит всю информацию, необходимую для выполнения подведения к требуемому сдвигу, обозначенному как СДВИГ.
Другую незначительную оптимизацию в целях минимизации времени подведения можно осуществить путем вычисления среднего количества элементов сигнала, на которое продвигается СВОБОДНЫЙ_СЧЕТ, пока ПЦС обрабатывает скачок, и прибавление этого числа к вычислению Z. Для большинства подведений это не будет иметь какого-либо эффекта, так как блок 540 управления подведением выполняет остаточное подведение, но иногда это дополнительное значение может привести к выбору более оптимального скачка, что сократит время максимального подведения.
И, наконец, в блоке 790 ПЦС 500 выдает сигнал КОМАНДА_ПОДВЕДЕНИЯ в блок 540 управления подведением для подведения ЛСРОС 520 и счетчика 530 на величину, содержащуюся в сигнале ВЕЛИЧИНА_ПОДВЕДЕНИЯ. КОМАНДА_ПОДВЕДЕНИЯ будет указывать, следует ли выполнять опережение или запаздывание и на сколько элементов сигнала. После того, как блок 540 управления подведением завершит задачу, инициированную сигналом КОМАНДА_ПОДВЕДЕНИЯ, ПШ последовательность, сформированная через ЛСРОС_СОСТОЯНИЕ, будет содержать точный сдвиг, определенный в блоке 710.
Таким образом, были описаны способ и устройство для генератора псевдослучайной шумовой последовательности с быстрым подведением. Данное описание позволит любому специалисту в данной области техники осуществить или использовать изобретение. Для специалистов в данной области техники будут очевидны различные модификации вариантов осуществления изобретения, а его общие принципы могут быть применены для создания других вариантов без применения творческих усилий. Следовательно, настоящее изобретение не ограничено проиллюстрированными конкретными вариантами, а имеет самый широкий объем, соответствующий раскрытым принципам и новым признакам.
Реферат
Изобретение относится к области связи, в частности предназначено для формирования псевдослучайной шумовой последовательности с возможностью быстрого подведения от одного сдвига к другому. Технический результат - повышение скорости подведения. один или несколько загружаемых ПШ генераторов управляются ПЦС или микропроцессором вместе с автономным счетчиком, который ведет опорный счет сдвигов. ПШ генератор обычно является частью указателя для искателя. Каждый ПШ генератор состоит из загружаемого линейного сдвигового регистра с обратной связью (ЛСРОС) или его эквивалента, загружаемого счетчика для поддержания индекса состояния данного конкретного ПШ генератора и блока управления подведением, выполненного с возможностью приема команды на подведение и управления ЛСРОС и счетчиком индексов для осуществления опережения или запаздывания на определенное расстояние сдвига. Увеличение скорости осуществляется посредством управления ПЦС. В памяти хранится таблица состояний ЛСРОС и соответствующие номера индексов. Состояния ЛСРОС подразделяют общее возможное количество возможных состояний. Целесообразно равномерно разнести хранимые состояния по ПШ кругу. ПЦС обеспечивает быстрое подведение путем выполнения двухступенчатого процесса. Сначала ПШ генератор загружается таким образом, чтобы он “перескочил” к ближайшему состоянию с использованием таблицы, а затем используется блок управления подведением ПШ генератора для подведения на остальную часть пути. 3 н. и 1 з.п.ф-лы, 7 ил.