Система для модулирования информационных сигналов в ячеистой телефонной системе с кодовым разделением множественного доступа и способ его осуществления - RU2125344C1
Код документа: RU2125344C1
Чертежи










Описание
I. Область техники
Настоящее изобретение относится к ячеистым телефонным системам. Более конкретно, настоящее изобретение относится к новым и усовершенствованным системам и способу
передачи данных в мобильной ячеистой телефонной системе или спутниковой мобильной телефонной системе, использующей расширенные спектрально коммуникационные сигналы.
II. Предшествующий
уровень техники
Способ, базирующийся на (кодовом разделении множественного доступа) модулировании кодоразделенного множественного доступа, является одним из способов, обеспечивающих
информационное общение большого числа системных пользователей. Другими известными способами, используемыми в коммуникационных системах множественного доступа, являются: множественный доступ с
временным разделением, множественный доступ с частотным разделением и разнообразные амплитудные модуляции, подобные амплитудно-сжимающей однополосной модуляции. Однако широкоспектральный модуляционный
способ с кодовым разделением множественного доступа имеет существенные преимущества над названными модуляционными способами в системах связи с множественным доступом. Использование способов кодового
разделения множественного доступа в множественного доступа коммуникационной системе описано в патенте США N 4901307 "Широкоспектральная множественного доступа коммуникационная система, использующая
спутниковые или наземные повторители", выданном 13 февраля 1990 г. и переуступленном правопреемнику настоящего изобретения, который включен в настоящее описание путем ссылки.
В названном выше патенте описан способ множественного доступа, при котором большое число пользователей мобильной телефонной системы, каждый из которых имеет приемопередатчик, общаются через спутниковые повторители или наземные базовые станции (которые также называют ячейными станциями, ячейными узлами или, для краткости, ячейками) с применением широкоспектральных коммуникационных сигналов при кодовом разделении множественного доступа. При использовании связи с кодовым разделением множественного доступа частотным спектром можно пользоваться многократно, что позволяет повысить пропускную способность пользовательской системы. Использование кодового разделения множественного доступа позволяет более эффективно использовать спектр, чем это возможно при других способах множественного доступа.
Спутниковому каналу обычно свойственно замирание, называемое замиранием Ричиана (Rician). Поэтому принимаемый сигнал состоит из прямой составляющей, сложенной с многократно отраженной составляющей, обладающей характеристиками замирания Релея. Отношение мощностей прямой и отраженной составляющих составляет порядка 6-10 дБ в зависимости от характеристик антенны подвижного устройства и среды, окружающей подвижное устройство.
В противоположность к спутниковому каналу, наземный канал испытывает сигнальное замирания, которое обычно состоит из составляющей замирания Релея без прямой составляющей. Таким образом, наземный канал представляет среду более сильного замирания, чем спутниковый канал, в котором доминирующей характеристикой является замирание Ричиана.
Замирание Релея, испытываемое сигналом наземного канала, вызвано тем, что сигнал многократно отражается от различных предметов физического окружения. В результате этого сигнал приходит на приемник подвижного устройства с различных направлений с различными задержками прохождения. В полосах сверхвысоких частот, обычно используемых мобильной радиосвязью, а также ячеистыми мобильными телефонными системами, могут образовываться значительные фазовые разности между сигналами, идущими различными путями. Этим объясняется вероятность деструктивного суммирования сигналов, приводящего к глубоким федингам.
Замирание наземного канала в сильной мере зависит от физического положения подвижного устройства. Небольшое изменение положения подвижного устройства изменяет физические задержки на всех путях распространения сигнала, делая различные фазы различных путей. Поэтому движение подвижного устройства в окружающей среде может повлечь чрезвычайно быстрый фединговый процесс. Например, в полосе частот 850 МГц ячеистой радиосвязи скорость такого фединга может составлять один фед (fade) в секунду на милю в час скорости подвижного устройства. Такой фединг способен быть исключительно разрушительным для сигналов в наземном канале, приводя к низкому качеству связи. Для преодоления фединга можно использовать дополнительную передаточную мощность. Однако такое повышение мощности повлечет излишний расход мощности пользователем и усилит интерференционные помехи в системе.
Способ модулирования кодовым разбиением множественного доступа, описанный в патенте США N 4901307, имеет много преимуществ в сравнении со способами узкополосной модуляции, применяемыми в коммуникационных системах, использующих спутниковые или наземные повторители. Наземный канал в любой коммуникационной системе ставит много проблем, связанных с многопутными сигналами. Способ кодового разбиения множественного доступа позволяет преодолеть специальные проблемы наземного канала путем ослабления вредного воздействия многопутья, например - фединг, и в то же время воспользоваться предоставляемыми им преимуществами.
В кодоворазделяющей множественный доступ ячеистой телефонной системе одной и той же частотной полосой можно пользоваться для связи во всех ячейках. Свойства формы волны при кодовом разделении множественного доступа, повышающие скорость обработки, дополнительно используются для различения сигналов, занимающих одну и ту же полосу частот. Далее, высокоскоростная псевдошумовая модуляция позволяет отделять многие различные пути распространения при условии, если разность в путевых задержках превышает псевдошумовую чиповую длительность, т.е. 1/ ширина полосы. Если псевдошумовая чиповая частота около 1 МГц используется в кодоворазделяющей множественный доступ системе, то коэффициент обработки полностью развернутого спектра, равный отношению развернутой полосы к системной скорости передачи данных, можно применить против путей, которые отличаются по длительности путевой задержки более чем на одну микросекунду от заданного пути. Разность путевых задержек в одну микросекунду соответствует разностному путевому расстоянию приблизительно 1000 футов. Городское окружение обычно порождает разностные путевые задержки, которые значительно превышают одну микросекунду и для некоторых областей достигают 10-20 микросекунд.
В узкополосных модулирующих системах, подобных используемым известными телефонными системами с аналоговой частотной модуляцией, существование множества путей порождает сильный многопутный фединг. Однако при широкополосной модуляции с кодовым разделением множественного доступа можно различные пути опознавать в процессе демодулирования. Такое опознание сильно уменьшает вредное действие многопутного фединга. Многопутный фединг неполностью исключается при использовании способов опознания с кодовым разделением множественного доступа, поскольку случайно возникают пути, разности задержки которых меньше псевдослучайной чиповой длительности для конкретной системы. Сигналы, имеющие путевые задержки такого порядка, нельзя различить в демодуляторе, что обусловливает некоторый фединг.
Поэтому желательно ввести некоторого рода различие, которое позволит системе понизить фединг. Введение различия является одним из подходов к ослаблению вредного действия фединга. Существуют три типа различия: временное различие, частотное различие и пространственное различие.
Временное различие можно лучше всего обеспечить использованием повторения, перемежения и обнаруживающего ошибки кодирования, которое является одной из форм повторения. Настоящее изобретение применяет каждый из этих способов в форме временного различия.
Кодоворазделяющий множественный доступ, будучи по своей природе широкополосным сигналом, предоставляет возможность ввести частотное различие путем распределения сигнальной энергии по широкой полосе. Поэтому частотно-избирательный фединг окажет вредное действие лишь на небольшую часть полосы сигнала кодоворазделяющего множественного доступа.
Пространственное или путевое различие обеспечивается созданием нескольких сигнальных путей через одновременные линии от подвижного пользователя через две или более ячеек. Далее, путевое различие можно получить используя многопутную среду в процессе обработки расширенного спектра, принимая и обрабатывая отдельно каждый сигнал, поступающий с отличающейся от других задержкой прохождения. Примеры путевого разнообразия даны в совместно рассматриваемой патентной заявке США "Мягкое переключение в ячеистой телефонной системе с кодовым разделением множественного доступа", N 07/433030, поданной 7 ноября 1989, которая защищена теперь патентом США N 5101501, выданным 31 марта 1992, и одновременно рассматриваемой заявке США "Различающий приемник в ячеистой телефонной системе с кодовым разделением множественного доступа", N 07/432552, также поданной 7 ноября 1989, которая теперь защищена патентом США N 5109390, выданным 26 апреля 1992, которые переуступлены правопреемнику настоящего изобретения.
Вредное воздействие фединга можно также снижать в определенной мере в кодоворазделяющей множественный доступ системе путем управления мощностью передатчика. Система для управления мощностью как ячейки, так и подвижного устройства описана в одновременно рассматривающейся патентной заявке США "Способ и устройство для управления мощностью передачи в ячеистой подвижной телефонной системе с кодовым разделением множественного доступа" N 07/433031, поданной 7 ноября 1989, ставшей патентом США N 5056109, выданным 8 октября 1991, также переуступленный правопреемнику настоящего изобретения.
Способ кодового разделения множественного доступа, описанный в патенте США N 4901307, предполагает использование когерентных модуляции и демодуляции для обоих направлений линии коммуникаций между подвижным устройством и спутником. Поэтому там описано использование контрольного несущего сигнала в качестве когерентного фазового эталона для линии между спутником и подвижным устройством и линии между ячейкой и подвижным устройством. Однако в наземном ячеистом окружении мощность многопутевого фединга, влекущего фазовое расстройство канала, делает невозможным использование способа когерентной демодуляции применительно к линии между подвижным устройством и ячейкой. Настоящее изобретение обеспечивает наличие устройства, которое нейтрализует вредные эффекты многопутья в линии между подвижным устройством и ячейкой посредством использования некогерентных модуляций и демодуляции.
Способ кодового разделения множественного доступа, описанный в патенте США N 4901307, дополнительно предполагает использование сравнительно длинных псевдошумовых последовательностей, причем каждому пользовательскому каналу в этом случае приписывается индивидуальная псевдошумовая последовательность. Взаимная корреляции между различными псевдошумовыми последовательностями и автокорреляция любой псевдошумовой последовательности для любых временных сдвигов, отличных от нуля, обе имеют средним нулевое значение, что позволяет при приеме различать сигналы различных пользователей.
Однако такие псевдошумовые сигналы не являются ортогональными. Хотя среднее взаимных корреляций равно нулю, на коротком временном интервале, подобном длительности информационного бита, взаимная корреляция следует биноминальному распределению. Поэтому сигналы интерферируют друг с другом точно так, как если бы они были широкополосным гауссовым шумом с одинаковой спектральной плотностью. Поэтому другие пользовательские сигналы, или шум взаимной интерференции, ставят предел достижимой пропускной способности.
Существование многопутья может способствовать введении путевого различия в широкополосную псевдошумовую систему с кодовым разделением множественного доступа. Если имеется два или более путей с разностью путевых задержек более одной микросекунды, то можно использовать два или более псевдошумовых приемника для раздельного приема этих сигналов. Поскольку таким сигналам обычно свойственна индивидуальность в отношении к многопутному федингу, т.е. они обычно одновременно не замирают, выходы этих двух приемников можно скомбинировать по различию. Следовательно, затухание случается лишь тогда, когда оба приемника воспринимают замирания одновременно. Поэтому одной из особенностей настоящего изобретения является использование двух или более псевдошумовых приемников, скомбинированных с комбинатором различий. Чтобы использовать существование многопутных сигналов и преодолеть фединг, необходимо использовать такую форму волны, которая позволит выполнять операции комбинирования путевых различий.
В основу изобретения положена задача создать возможность генерирования псевдошумовых ортогональных последовательностей для уменьшения взаимной интерференции, повышения пропускной способности для пользователей и обеспечения путевого различия, чтобы преодолеть фединг.
Раскрытие изобретения.
Реализация широкоспектральных коммуникационных способов, в частности способа кодового разделения множественного доступа, в мобильной ячеистой телефонной среде, как должно быть ясно из сказанного выше, обусловливает появление свойств, которые в значительной мере повышают системные надежность и пропускную способность в сравнении с другими коммуникационными системными способами. Способ кодового разделения множественного доступа, как сказано выше, дополнительно устраняет такие проблемы, как фединг и интерференция. Более того, способ кодового разделения множественного доступа повышает степень повторного использования частот, тем самым существенно увеличивая число пользователей системы.
Настоящее изобретение относится к новым и усовершенствованным способу и системе для конструирования псевдошумовых последовательностей, которые обеспечивают ортогональность между пользователями, чтобы уменьшалась взаимная интерференция, для повышения пропускной способности и улучшения линейных характеристик. При ортогональности псевдошумовых кодов на предопределенном временном интервале взаимная корреляция равна нулю, что влечет отсутствие интерференции между ортогональными кодами при условии, что кодовые временные рамки выравнены друг с другом.
В предпочтительном варианте осуществления коммуникационный обмен между ячейкой и подвижными устройствами выполняется прямыми широкоспектральными коммуникационными сигналами. В линии между ячейкой и подвижным устройством выделяют контрольный, синхронизирующий, страничный и речевой каналы. Информация, передаваемая по каналам линии между ячейкой и подвижным устройством, подвергается, вообще говоря, кодированию, перемежению, двухфазному смещению (телеграфным) ключом с ортогональным покрытием каждого символа, подвергнутого двухфазному смещению ключом, совместно с распределением (телеграфным) ключом по квадратурным фазам покрытых символов.
В линии между подвижным устройством и ячейкой выделяются каналы доступа и речи. Информация, передаваемая по каналам линии между подвижным устройством и ячейкой, обычно кодируется, перемежается, ортогонально передается совместно с распределением квадратурно-фазово смещающим ключом.
Краткое описание чертежей
В дальнейшем изобретение поясняется
конкретным примером его выполнения со ссылками на прилагаемые чертежи, на которых:
- Фиг. 1 схематично представляет изображение примера выполнения ячеистой телефонной системы с кодовым
разделением множественного доступа.
- Фиг. 2 представляет блок-схему оборудования ячейного участка, используемого ячеистой телефонной системой с кодовым разделением множественного доступа.
- Фиг. 3 представляет блок-схему приемника ячейного участка.
- Фиг. 4 представляет блок-схему модулятора передатчика ячейного участка.
- Фиг. 5 представляет пример временной диаграммы синхронизации синхронизирующих канальных символов.
- Фиг. 6 представляет пример временной диаграммы тактирования синхронных каналов с ортогональным покрытием.
- Фиг. 7 представляет пример временной диаграммы общего тактирования линии между ячейкой и подвижными устройствами.
- Фиг. 8 представляет блок-схему оборудования мобильной телефонной станции.
- Фиг. 9 представляет блок-схему телефона подвижного устройства, предназначенного для выполнения коммуникаций с кодовым разделением множественного доступа в ячеистой телефонной системе с кодовым разделением множественного доступа.
- Фиг. 10 представляет блок-схему приемника подвижного устройства.
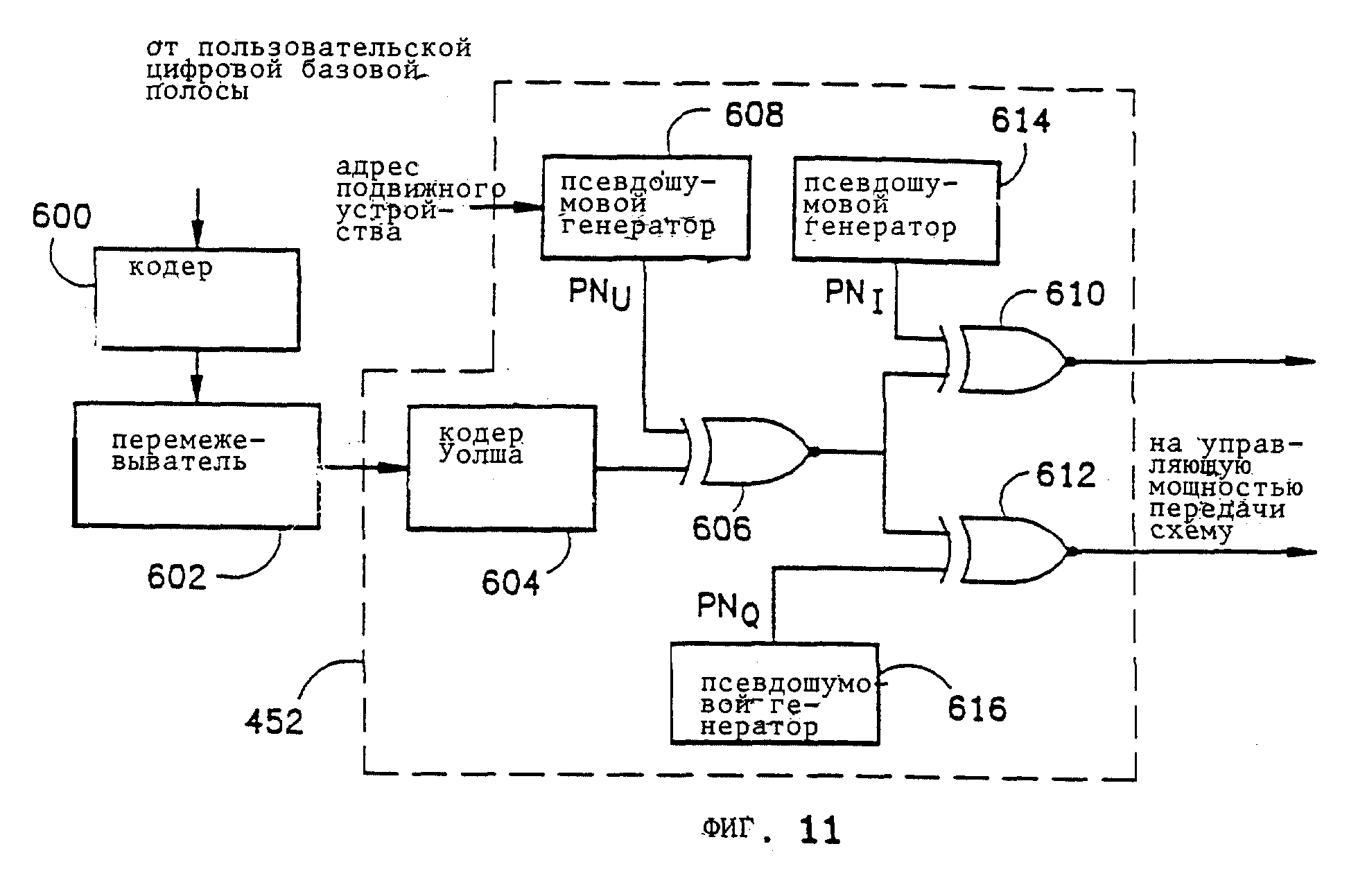
- Фиг. 11 представляет блок-схему модулятора передатчика подвижного устройства.
- Фиг. 12 представляет пример временной диаграммы для линии между ячейкой и подвижным устройством при различных скоростях передачи данных в пакетном режиме передачи.
- Фиг. 13 представляет временную диаграмму тактирования всей линии между подвижным устройством и ячейкой.
Наилучший вариант осуществления изобретения.
В ячеистой телефонной системе с кодовым разделением множественного доступа каждый ячейный участок имеет некоторое множество модулирующих-демодулирующих устройств или широкоспектральных модемов. Каждый модем состоит из цифрового широкоспектрального передаточного модулятора, по крайней мере, одного цифрового приемника широкоспектральных данных и поискового приемника. Каждый модем ячейного участка приписывается некоторому подвижному устройству по мере необходимости для обеспечения наилучших условий связи с приписываемым подвижным устройством.
В ячеистой телефонной системе с кодовым разделением множественного доступа используется схема мягкого переключения, в котором подвижному устройству задается модем нового ячейного участка, в то время как модем старого ячейного участка продолжает обслуживать соединение. Когда подвижное устройство располагается в промежуточной области между двумя ячейными участками, соединение может переключаться между этими ячейными участками в зависимости от мощности сигнала. Поскольку подвижное устройство всегда держит связь, по крайней мере, с модемом одного ячейного участка, то весьма мала вероятность сбоев в работе подвижного устройства и в обслуживании. Подвижное устройство использует несколько приемников для осуществления процесса переключения в дополнение к функции различения для снижения воздействий фединга.
В ячеистой телефонной системе с кодовым разделением множественного доступа каждый ячейный участок передает сигнал "контрольной несущей". Если ячейка разбита на секторы, то в пределах ячейки каждому сектору присваивается индивидуальный контрольный сигнал. Этот контрольный сигнал используется подвижными устройствами для создания исходной системной синхронизации и для жесткого слежения за временем, частотой и фазой сигналов, передаваемых ячейным участком. Каждый ячейный участок также передает широкоспектрально модулированную информацию, подобную идентификации ячейного участка, системному тактированию, страничную информацию подвижного устройства и другие разнообразные сигналы.
Контрольный сигнал, передаваемый каждым сектором каждой ячейки, имеет один и тот же расширяющий код, но при индивидуальном фазовом смещении кода. Фазовое смещение позволяет отличать контрольные сигналы друг от друга, что позволяет различать передающие ячейные участки или сектора. Применение одного и того же контрольного сигнального кода позволяет подвижному устройству установить синхронизацию системного тактирования одноразовым поиском по всем фазам контрольного сигнального кода. Посредством корреляционной обработки весьма просто определяется наиболее мощный контрольный сигнал. Обнаруженный наиболее мощный контрольный сигнал обычно соответствует контрольному сигналу, передаваемому ближайшим ячейным участком. Однако всегда используется наиболее мощный контрольный сигнал вне зависимости от того, передает его ближайший ячейный участок или какой-либо другой.
После получения наиболее мощного контрольного сигнала, т. е. после синхронизации подвижного устройства с наиболее мощным контрольным сигналом, подвижное устройство начинает поиск другой несущей, которая предназначена для приема всеми системными пользователями в ячейке. Эта несущая, называемая синхронизирующим каналом, передает широковещательное сообщение, содержащее системную информацию для использования подвижными устройствами в системе. Системная информация идентифицирует ячейный участок и систему, а также передает такую информацию, которая позволяет без дополнительного поиска синхронизировать длинные псевдошумовые коды, рамки перемежателя, вокодеры и другую тактирующую систему информацию, используемые подвижным устройством. Может быть предусмотрен другой канал, называемый страничным каналом, для передачи сообщений на подвижные устройства, указывающий, что для них поступил вызов, и для реагирования присвоением канала, когда подвижное устройство делает вызов.
Подвижное устройство продолжает сканирование принятого кода сигнала контрольной несущей на кодовых смещениях, соответствующих соседнему сектору ячейного участка или передаваемых поблизости контрольных сигналов. Это сканирование выполняется для определения, не стал ли контрольный сигнал, подаваемый соседним сектором или ячейкой, сильнее контрольного сигнала, который первоначально был определен как сильнейший. Если во время отсутствия вызовов контрольный сигнал от соседнего сектора или соседнего ячейного участка становится сильнее сигнала, поступающего первоначально выбранного ячейного сектора или ячейного участка по силе контрольного сигнала, то подвижное устройство будет принимать наиболее сильные контрольные сигналы и соответствующие синхронизирующий и страничные каналы нового сектора или ячейного участка.
Когда инициируется вызов, определяется адрес псевдошумового кода для использования во время этого соединения. Кодовый адрес может быть либо присвоен ячейным участком, либо определяться по предопределенному правилу, учитывающему идентификацию подвижного устройства. После установления соединения подвижное устройство продолжает сканировать контрольный сигнал, передаваемый этим ячейным участком и по которому установлено соединение, а также контрольные сигналы соседних секторов или ячеек. Сканирование контрольных сигналов выполняется для того, чтобы определить, когда один из контрольных сигналов, передаваемых соседними секторами или ячейками, становится сильнее контрольного сигнала, передаваемого той ячейкой, с которой подвижное устройство держит связь. Когда контрольный сигнал, подаваемый соседней ячейкой или ячейным сектором, становится сильнее контрольного сигнала текущей ячейки или ячейного сектора, это становится указанием для подвижного устройства, что совершен вход в новую ячейку или ячейный сектор и что надлежит инициировать переключения.
Пример телефонной системы, иллюстрирующей вариант осуществления настоящего изобретения, дан на фиг. 1. Система, иллюстрируемая фиг. 1, реализует способ широкоспектральной модуляции применительно к связям между системными подвижными устройствами или мобильными телефонами и ячейными участками. Ячеистые системы в больших городах могут иметь сотни ячейных станций, обслуживающих сотни тысяч мобильных телефонов. Применение широкоспектрального способа, в частности способа кодового разделения множественного доступа, способствует повышению пропускной способности системы такого размера, если сравнивать с известными ячеистыми системами с фазовой модуляцией.
Как видно из фиг. 1, системный контроллер и переключатель 10, который также называют мобильной телефонной коммутационной станцией, обычно содержит интерфейсную и обрабатывающую аппаратуру для обеспечения системного управления ячейным участком. Контроллер 10 также управляет маршрутизацией телефонных вызовов от телефонной сети общего пользования на подходящую ячейку для передачи на подходящее подвижное устройство. Контроллер 10 также управляет маршрутизацией вызовов от подвижных устройств через по крайней мере один ячейный участок к телефонной сети общего пользования. Контроллер 10 может устанавливать соединения между подвижными пользователями через подходящие ячейные участки, поскольку подвижные устройства обычно не сообщаются непосредственно друг с другом.
Контроллер 10 может быть сопряжен с ячейными участками разнообразными средствами, подобными постоянным телефонным линиям, волоконно-оптическим кабелям или микроволновой радиосвязи. На фиг. 1 изображены два ячейных участка 12 и 14 и подвижные устройства 16 и 18, каждое из которых имеет ячейный телефон. Ячейные узлы 12 и 14, как предполагается в описании и изображено на фигурах, обслуживают всю площадь ячейки. Однако должно быть ясно, что географически ячейка может быть разбита на сектора, причем каждый сектор рассматривается как отдельная площадь охвата. Поэтому переключения выполняются между секторами одной и той же ячейки так же, как это описано для множества ячеек, при одновременном обеспечении различия между секторами, как для ячеек.
На фиг. 1 стрелками 20a-20b и 22a-22b обозначены возможные коммуникационные линии между ячейным узлом 12 и подвижными устройствами 16 и 18. Аналогично, стрелками 24a-22b и 24a-24b, соответственно, обозначены возможные коммуникационные линии между ячейным узлом 14 и подвижными устройствами 16 и 18. Ячейные узлы 12 и 14 обычно передают на одинаковой мощности.
Площади, обслуживаемые отдельными ячейными узлами, или ячейки имеют такие географические очертания, что подвижное устройство обычно будет находиться ближе к одному из ячейных узлов, и внутри одного ячейного сектора, если ячейка разбита на сектора. Когда подвижное устройство бездействует, т.е. вызовы не обрабатываются, подвижное устройство постоянно следит за передачами контрольных сигналов, ведущимися каждым из ближних ячейных узлов и, если применимо, каждым отдельным ячейным узлом, обслуживаемая которым ячейка разбита на секторы. Как показывает фиг. 1, контрольные сигналы соответственно передаются на подвижное устройство 16 ячейными узлами 12 и 14 по коммуникационным линиям 20a и 26a. Подвижное устройство 16 может определить ячейку путем сравнения по мощности контрольных сигналов, передаваемых ячейными узлами 12 и 14.
В примере, иллюстрируемом фиг. 1, подвижное устройство 16 можно полагать расположенным ближе к ячейному узлу 12. Когда подвижное устройство 16 инициирует вызов, управляющее сообщение передается на ближайший ячейный узел, т. е. узел 12. После приема запрашивающего соединение сообщения ячейный узел 12 передает набранный номер на системный контроллер 10. Затем системный контроллер 10 прокладывает соединение через телефонную сеть общего пользования до вызываемого абонента.
Если вызов инициируется в пределах телефонной сети общего пользования, контроллер 10 передает вызывную информацию на все ячейные узлы на территории. В ответ ячейные узлы передают каждый страничное сообщение в пределах охватываемой им области, которое предназначено для вызываемого подвижного пользователя. Когда вызываемый подвижной пользователь (устройство) услышит страничное сообщение, оно отвечает управляющим сообщением, которое передается на ближайший ячейный узел. Это управляющее сообщение сигнализирует системному контроллеру, что этот конкретный ячейный узел имеет связь с подвижным устройством. Затем контроллер 10 маршрутизирует вызов через этот ячейный узел на подвижное устройство. Если подвижное устройство 16 переместится за пределы площади, охватываемой начальным ячейным узлом, т.е. узлом 12, предпринимается попытка продолжить соединение маршрутизацией вызова через другой ячейный узел.
Что касается ячеистых телефонных систем, то Федеральная комиссия по связи (FCC) выделила всего 25 МГц для линий от подвижного устройства до ячейки и 25 МГц для линий от ячейки до подвижного устройства. Федеральная комиссия по связи разделила выделенный ресурс поровну между двумя сервисными службами, одной из которых является проводная телефонная компания для обслуживаемой области, а другая выбрана по лотерее. По причине порядка, в котором сделаны выделения, 12,5 МГц, выделенные для каждой несущей каждого направления связи, дополнительно разделены на две подполосы. Для проводных несущих каждая подполоса имеет ширину 10 МГц и 2,5 Мгц. Для непроводных несущих каждая подполоса имеет ширину 11 МГц и 1,5 МГц. Таким образом, сигнальная полоса менее 1,5 МГц может быть вложена в любую из подполос, в то время как полоса менее 2,5 МГц может быть вложена во все, кроме одной подполосы.
Для сохранения максимальной гибкости в применении способа кодового разделения множественного доступа к наличному ячеистому частотному спектру, форма волны, используемая в ячеистой телефонной системе, должна иметь полосу менее 1,5 МГц. Второй хороший выбор представила бы полоса около 2,5 МГц, позволяющая полную гибкость обращения с проводными ячейными несущими и почти полную гибкость с непроводными ячейными несущими. Хотя использование более широкой полосы имеет преимущество в повышении степени многопутной различимости, недостатки обнаруживаются в форме более высоких затрат на оборудование и меньшей гибкости при выделении частот внутри присвоенной полосы.
В широкоспектральной ячеистой телефонной системе, иллюстрируемой фиг. 1, предпочтительная форма волны включает несущую расширенного спектра псевдошумовых последовательностей. Чиповая частота псевдошумовой последовательности для предпочтительного варианта осуществления выбрана равной 1,2288 МГц. Эта чиповая частота выбрана для того, чтобы результирующая полоса, составляющая 1,25 МГц после фильтрования, составляла приблизительно одну десятую от полной полосы, выделяемой одной несущей ячейного сервиса. Другим соображением в пользу выбора именно этой чиповой частоты, является то, что желательно, чтобы чиповую частоту можно было бы делить нацело на частоты немодулированных данных. В предпочтительном варианте осуществления частота передачи данных в основной полосе составляет 9600 битов/сек, что определяет выбор 1,2288 МГц, т.е. 128 раз по 9600, для псевдошумовой чиповой частоты.
В линии ячейка - подвижное устройство двоичные последовательности, используемые для расширения спектра, создаются из двух различных типов последовательностей, каждая с различными свойствами, для создания различных функций. Имеется внешний код, общий для всех сигналов в ячейке или секторе, который используется для различения многопутных сигналов. Внешний код также используется для различения сигналов, передаваемых различными ячейками или секторами на подвижные устройства. Имеется также внутренний код, который используется для различения пользовательских сигналов, передаваемых одиночным сектором или ячейкой.
Форма несущей в предпочтительном варианте осуществления для передаваемых ячейным узлом сигналов использует синусоидальную несущую, которая квадрофазно (четырехфазно) модулируется парой бинарных псевдошумовых последовательностей для создания внешнего кода, передаваемого одиночным сектором или ячейкой. Эти последовательности генерируют два различных псевдошумовых генератора с одинаковой длиной последовательностей. Одна последовательность двухфазно модулирует синфазный канал (1 канал) несущей, и другая последовательность двухфазно модулирует квадратурный фазовый канал (Q канал) несущей. Результирующие сигналы суммируются для образования полной четырехфазной несущей.
Хотя величины логический ноль и логическая единица известным образом используются для представления двоичных последовательностей, сигнальными напряжениями, используемыми в модуляционном процессе, являются +V вольт для логической "единицы" и -V вольт для логического "нуля". Чтобы двухфазно промодулировать синусоидальный сигнал, синусоиду с нулевым средним умножают на +V или -V уровень напряжения, как это предопределяют двоичные последовательности, посредством множительной схемы. Затем результирующий сигнал можно ограничить по полосе, пропуская через полосовой фильтр. Также известен способ использования фильтра нижних частот для пропускания потока двоичных последовательностей до умножения на синусоидальный сигнал, чтобы изменить порядок выполнения операций. Квадрафазный модулятор состоит из двух двухфазных модуляторов, каждый из которых возбуждается индивидуальной последовательностью, при этом синусоидальные сигналы, используемые двухфазными модуляторами, разнесены по фазе на 90o.
В предпочтительном варианте осуществления длина последовательностей для несущей передаваемого сигнала выбрана равной 32768 чипам. Последовательности такой длины можно генерировать генератором модифицированных максимальной длины линейных последовательностей путем добавления нуля к последовательности длиной 32767 чипов. Результирующая последовательность обладает хорошими взаимокорреляционными и автокорреляционными свойствами. Хорошие взаимокорреляционные и автокорреляционные свойства необходимы для предотвращения взаимной интерференции контрольных несущих, передаваемых различными ячейками.
Такая короткая длина последовательности целесообразна, потому что минимизирует время приема подвижных устройств, когда они впервые входят в систему без знания системного тактирования. Без знания тактирования должна просматриваться вся длина последовательности для определения правильного тактирования. Более длинная последовательность делает время приема более длинным. Хотя можно использовать последовательности, которые короче 32768, следует понимать, что при сокращении длины последовательности уменьшается коэффициент кодовой обработки. При уменьшении коэффициента обработки режекция многопутной интерференции, а также интерференции (с сигналами) от соседних ячеек или других источников может снизиться до недопустимого уровня. Поэтому желательно пользоваться наиболее длинной последовательностью, которую можно принять за приемлемое время. Также желательно использовать одинаковые полиномы во всех ячейках, чтобы подвижное устройство, не знающее, в какой ячейке оно находится, когда первоначально синхронизируется, могло достичь полной синхронизации путем поиска одного кодового полинома.
Чтобы упростить процесс синхронизации, все ячейки в системе синхронизируются друг с другом. В примере осуществления изобретения ячейковая синхронизация выполняется синхронизацией всех ячеек с общей системой отсчета времени, спутниковой навигационной системой "Навстар Глобел Позишнинг Систем", которая сама синхронизирована с Универсально Скоординированным Временем (UTC).
Сигналы от различных ячеек разделяются путем создания временного смещения базовых последовательностей. Каждой ячейке приписано индивидуальное временное смещение базовых последовательностей, отличающееся от таковых ее соседей. В предпочтительном варианте период 32768 разбит на набор из 512 временных смещений. 512 временных смещений разнесены друг от друга с шагом 64 чипа. Каждому сектору каждой ячейки также приписано одно из различных временных смещений для использования во всех его передачах. Если в системе окажется более 512 секторов или ячеек, то смещения можно повторно использовать точно так, как частоты повторно используются в известной частотно-модулирующей ячеистой системе. В других проектах можно устанавливать число смещений, отличающееся от 512. При тщательном процессе присвоения смещений контрольных сигналов не следует допускать, чтобы близко расположенные ячейки использовали близко расположенные временные смещения.
Все сигналы, передаваемые ячейной или одним из секторов ячейки, обладают одинаковыми внешними псевдошумовыми кодами для I и Q каналов. Сигналы расширяются внутренним ортогональным кодом, генерируемым с помощью функций Уолша (Walsh). Сигнал, направленный на некоторого конкретного пользователя, умножается на внешнюю псевдошумовую последовательность и некоторую конкретную последовательность Уолша или последовательность из последовательностей Уолша, присвоенную системным контроллером на время телефонного соединения пользователя. Этот же внутренний код поступает одновременно на I и Q каналы, что влечет модуляцию, которая фактически является двухфазной для внутреннего кода.
Известно, что можно построить набор из n ортогональных двоичных последовательностей, каждая длиной n, причем n любой степени 2, о чем можно узнать, например, в статье С.У. Голомба и др. в статье "Спутниковые приложения цифровой связи", Прентис-Холл, Инк., стр. 45 - 65. Действительно, известны ортогональные двоичные последовательности для большинства длин, которые являются кратными 4 и менее чем двух сотен. Один класс таких последовательностей, которые очень просто генерировать, называется функцией Уолша, а также известны как матрицы Хадамарда (Hadamard).
Функцию Уолша порядка n можно определить рекурсивно следующим образом:

где
W' означает логическое дополнение W и

Таким образом,


(8) имеет вид:

Последовательность Уолша является одной строкой в матрице функций Уолша. Функция Уолша порядка n содержит n последовательностей, каждая длиной в n битов.
Функция Уолша порядка n (как и другие ортогональные функции) обладает таким свойством, что на интервале из n кодовых символов взаимная коррекция различных последовательностей внутри набора равна нулю при условии, что последовательности совмещены во времени друг с другом. Это можно обнаружить, заметив, что каждая последовательность отличается от любой другой последовательности точно половиной своих битов. Также следует заметить, что всегда имеется одна последовательность, состоящая из нулей, и что все другие последовательности состоят наполовину из нулей и наполовину из единиц.
Соседние ячейки и сектора могут повторно использовать последовательности Уолша, поскольку внешние псевдошумовые коды, используемые соседними ячейками и секторами, различны. Поскольку различны длительности распространения сигналов между некоторой конкретной подвижной станцией (т.е. местом ее расположения) и двумя или более различными ячейными узлами, то нет возможности удовлетворить условию временного совмещения, необходимого для ортогональности функций Уолша для обеих ячеек одновременно. Поэтому можно использовать внешний псевдошумовой код для различия сигналов, поступающих на подвижное устройство от различных ячеечных узлов. Однако все сигналы, передаваемые ячеечным узлом, ортогональны друг другу, и между ними не возникает интерференция. Этим исключается в значительной мере интерференция в большинстве участков, позволяя повысить пропускную способность.
Система предполагает, что речевой канал представляет собой канал с переменной скоростью передачи, причем скорость передачи данных может изменяться от одного блока данных к другому с минимальными издержками, обусловливаемыми необходимостью управлять скоростью данных. Использование переменных скоростей передачи данных уменьшает взаимную интерференцию, исключая ненужные передачи, когда нет речевого сигнала, подлежащего передаче. Используются алгоритмы, встроенные в вокодеры, для генерирования изменяющегося числа битов в каждом вокодером блоке в соответствии с изменениями в речевой активности. Во время активной речи вокодер может генерировать 20 мсек., блоки данных, содержащие 20, 40, 80 или 160 битов, в зависимости от активности говорящего. Желательно передавать блоки данных за фиксированное время, изменяя скорость передачи. Также желательно не требовать, чтобы сигнальные биты информировали приемник о числе передаваемых битов.
Блоки дополнительно кодируются с использованием кода циклической избыточности (CRCC), который прибавляет к блоку дополнительный набор паритетных битов, которые можно использовать для определения, является или нет блок данных правильным после декодирования. Коды проверки циклической избыточности генерируются делением блока данных на предопределенный двоичный полином. Контрольный код циклической избыточности состоит из всех или некоторой части битов остатка после деления. Контрольный код циклической избыточности проверяется приемником путем получения такого же остатка и сравнения его на совпадение с принятыми битами остатка.
В описываемом изобретении принимающий декодер декодирует блок, как если бы он содержал 160 битов, и затем вновь, как если бы он содержал 80 битов, т. д., пока не будут опробованы все возможные блочные длины. Контрольный код циклической избыточности вычисляется на каждом сеансе декодирования. Если одно из пробных декодирований закончится правильным контрольным кодом циклической избыточности, то блок данных принимается и пропускается на вокодер для дальнейшей обработки. Если пробное декодирование не даст правильный контрольный код циклической избыточности, то принятые символы передаются на сигнальный процессор системы, где могут быть выполнены другие вспомогательные операции.
В передатчике ячейки мощность передаваемой волны изменяется в зависимости от скорости данных блока. При наибольшей скорости данных используется наибольшая мощность несущей. Когда скорость данных ниже максимальной, модулятор, помимо понижения мощности, повторяет каждый символ закодированных данных столько раз, сколько требуется для достижения желаемой скорости передачи данных. Например, при наименьшей скорости передачи каждый символ закодированных данных передается четыре раза.
В передатчике подвижного устройства пиковая мощность сохраняется постоянно, но передатчик отключается 1/2, 1/4 или 1/8 длительности в соответствии с числом битов, подлежащих передаче в блоке данных. Позиции интервалов включения передатчика изменяются псевдослучайно в соответствии с кодом адресуемого пользователя подвижного устройства.
В предпочтительном варианте размер n функции Уолша устанавливается равным шестидесяти четырем (n=64) для линии ячейка - подвижное устройство. Поэтому каждому из вплоть до 64 различных сигналов, подлежащих передаче, присваивается уникальная ортогональная последовательность. Поток символов, закодированных с возможностью последующего исправления ошибок, для каждого речевого диалога умножается на присвоенную ему последовательность Уолша. Поток символов, закодированных последовательностью Уолша и кодом исправления ошибок, для каждого речевого канала затем умножается на волну, закодированную внешним псевдошумовым кодом. Окончательные расширенные символьные потоки складываются для образования полной формы волны.
Полученная полная форма волны затем модулируется синусоидальной несущей, пропускается через полосовой фильтр, передается на любой рабочей частоте, усиливается и излучается антенной системой. В альтернативных вариантах осуществления настоящего изобретения может быть изменен порядок некоторых и вышеназванных операций для формирования сигнала, передаваемого ячейным узлом. Например, может оказаться предпочтительным умножать каждый речевой канал на форму волны, закодированную внешним псевдошумовым кодом, и выполнять операцию фильтрования до суммирования всех канальных сигналов, подлежащих излучению антенной. Хорошо известно, что можно менять порядок линейных операций для создания разнообразных проектов и достижения разнообразных преимуществ.
Форма волны предпочтительного варианта осуществления для ячеистого сервиса реализует идею "контрольной несущей" для линии ячейка - подвижное устройство, как это описано в патенте N 4901307. Все ячейки передают контрольные несущие, используя одну и ту же длину последовательности в 32768, но с различными временными смещениями для предотвращения взаимной интерференции.
Контрольная форма использует сплошь нулевую последовательность Уолша, т. е. последовательность Уолша, содержащую одни нули, которая имеется во всех наборах функций Уолша. Использование нулевой последовательности Уолша для контрольных последовательностей всех ячеек позволяет при выполнении начального поиска игнорировать функции Уолша до достижения синхронизации внешним псевдошумовым кодом. Рамки Уолша привязываются к циклу псевдошумового кода в силу того, что длина рамки Уолша является множителем длины псевдошумовой последовательности. Поэтому, если адресующие ячейки смещения псевдошумового кода умножены на 64 чипа (или длину рамки Уолша), оказывается известным процесс образования рамок Уолша по циклу тактирования внешнего псевдошумового кода.
Все ячейные узлы в обслуживаемой области обеспечиваются точной синхронизацией. В предпочтительном варианте осуществления приемник Глобальной Позиционирующей Системы в каждой ячейке синхронизирует местное тактирование формы волны с Универсальным скоординированным временем (UTC). Система глобального позиционирования позволяет синхронизировать с точностью, превышающей 1 микросекунду. Точная синхронизация ячеек желательна для того, чтобы обеспечивалось простое переключение вызовов (соединений) между ячейками, когда подвижные устройства перемещаются из одной ячейки в другую во время существования вызова (соединения). Если соседние ячейки синхронизированы, то у подвижного устройства не возникает трудностей войти в синхронизм с новой ячейкой, чем обеспечивается плавное переключение.
Контрольная несущая передается на более высоком уровне мощности, чем обычная речевая несущая, чтобы обеспечить более высокие отношения сигнал/шум и предел на интерференцию для этого сигнала. Более высокий уровень мощности контрольной несущей позволяет выполнить поиск начального приема на высокой скорости и делает возможным весьма точное слежение за фазой контрольной несущей с помощью сравнительно широкополосной следящей за фазой схемы. Фаза несущей, полученная при прослеживании контрольной несущей, используется в качестве эталона фазы несущей при демодулировании несущих, модулированных информационными сигналами пользователя. Этот способ позволяет многим несущим пользователей совместно использовать общий контрольный сигнал в качестве эталона фазы несущей. Например, в системе, передающей всего пятнадцать одновременных речевых несущих, контрольной несущей может быть выделена мощность, равная мощности четырех речевых несущих.
В дополнение к контрольной несущей другая несущая, предназначенная для приема всеми пользователями системы в ячейке, передается ячейным узлом. Эта несущая, называемая синхронизирующим каналом, также использует псевдошумовую последовательность длиной 32768 для расширения спектра, но с другой предварительно присвоенной последовательность Уолша. Синхронизирующий канал передает широковещательное сообщение, содержащее системную информацию для использования подвижными устройствами в системе. Эта системная информация идентифицирует ячейный узел и систему и сообщает информацию, позволяющую длинные псевдошумовые коды, используемые в информационных сигналах подвижных устройств, синхронизировать без дополнительного поиска.
Может быть предусмотрен другой канал, называемый страничным каналом, для передачи сообщений на подвижные устройства о том, что для них поступил вызов, и для реагирования присвоением канала, когда подвижное устройство инициирует вызов.
Каждая речевая несущая передает цифровое представление речи для телефонного соединения. Аналоговая речевая форма преобразуется а цифровую форму с использованием известных в цифровой телефонии способов и затем сжимается вокодерным процессом до скорости данных приблизительно 9600 бит/сек. Этот сигнал данных затем кодируется свертывание с повторением при скорости r=1/2, длине связи K= 9 и перемежается для создания обнаруживающих и исправляющих ошибки функций, которые позволяют системе работать при значительно более низких отношениях сигнал/шум и интерференции. Способы кодирования свертыванием, повторения и перемножения известны специалистам в данной области техники.
Результирующие закодированные символы умножаются на присвоенную последовательность Уолша и затем умножаются на внешний псевдошумовой код. В результате этого процесса частота псевдошумовой последовательности становится равной 1,2288 МГц или 128 раз по 9600 бит/сек скорости передачи данных. Результирующий сигнал модулирует радиочастотную несущую и суммируется с контрольной и установочной несущими, а также другими речевыми несущими. Суммирование можно выполнять в нескольких различных точках обрабатывающего процесса, подобных, например, JF (промежуточной) частоте или частоте базовой полосы, и как после, так и перед умножением на псевдошумовую последовательность.
Каждая речевая несущая также умножается на некоторую величину, которая устанавливает мощность ее передачи относительно мощности других речевых несущих. Этот признак управления мощностью позволяет выделять мощность между линиями таким образом, что больше мощности выделяется тем, чей получатель находится в сравнительно неблагоприятном месте. Предусмотрено оснащение подвижных устройств средствами, которые будут сообщать о принимаемом ими отношении сигнал/шум, чтобы можно было устанавливать мощность на уровне, обеспечивающем адекватную работу без потерь. Ортогональность функций Уолша не нарушается из-за применения различных уровней мощности для различных речевых несущих при условии сохранения временного совмещения.
Фиг. 2 иллюстрирует в схематичном виде пример осуществления оборудования ячейного узла. Ячейный узел использует две приемные системы, причем каждая имеет отдельную антенну и аналоговый приемник для приема с пространственным различением. В каждой из приемных систем сигналы обрабатываются одинаково, пока не начинается обработка комбинации различий. Элементы, заключенные в пунктирные контуры соответствуют элементам, необходимым для связи между ячейным узлом и одним подвижным устройством. Имеется также выход аналоговых приемников на другие элементы, обеспечивающие связь с другими подвижными устройствами.
Как иллюстрирует фиг. 2, первая приемная система состоит из антенны 30, аналогового приемника 32, поискового приемника 34 и приемника цифровых данных 36. Первая приемная система может дополнительно содержать оптический приемник цифровых данных 38. Вторая приемная система включает в себя антенну 40, аналоговый приемник 42, поисковый приемник 44 и приемник цифровых данных 46.
Ячейный узел также включает в себя управляющий процессор 48. Управляющий процессор 46 соединен с приемниками данных 36, 38 и 46, а также с поисковыми приемниками 34 и 44. Управляющий процессор 48 выполняет много функций, среди которых: обработка сигналов, генерирование тактовых сигналов, управление мощностью, управление переключением, различением, комбинированием различий и интерфейсом управляющего системой процессора с мобильной телефонной станцией (фиг. 8). Управляющий процессор 48 также выделяет последовательности Уолша, передатчики и приемники.
Эти две приемные системы соединены посредством приемников данных 36, 38 и 46 с комбинирующей различия и декодирующей схемой 50. Цифровая линия 52 также соединена с управляющим процессором 48, передающим модулятором ячейного узла 54 и цифровым переключателем мобильной телефонной станции. Цифровая линия 52 используется для обмена сигналами между мобильной телефонной станцией (фиг. 8) и передающим модулятором 54 и схемой 50 под управлением управляющего процессора 48.
Сигналы, передаваемые подвижным устройством, являются прямопоследовательными спектрально расширенными сигналами, модулированными псевдошумовой последовательностью, тактируемой с предопределенной частотой, которая в предпочтительном варианте осуществления равна 1,2288 МГц. Такое значение таковой частоты выбрано с тем, чтобы оно было кратным частоте данных базовой полосы, где она равна 9,6 Кбит/сек.
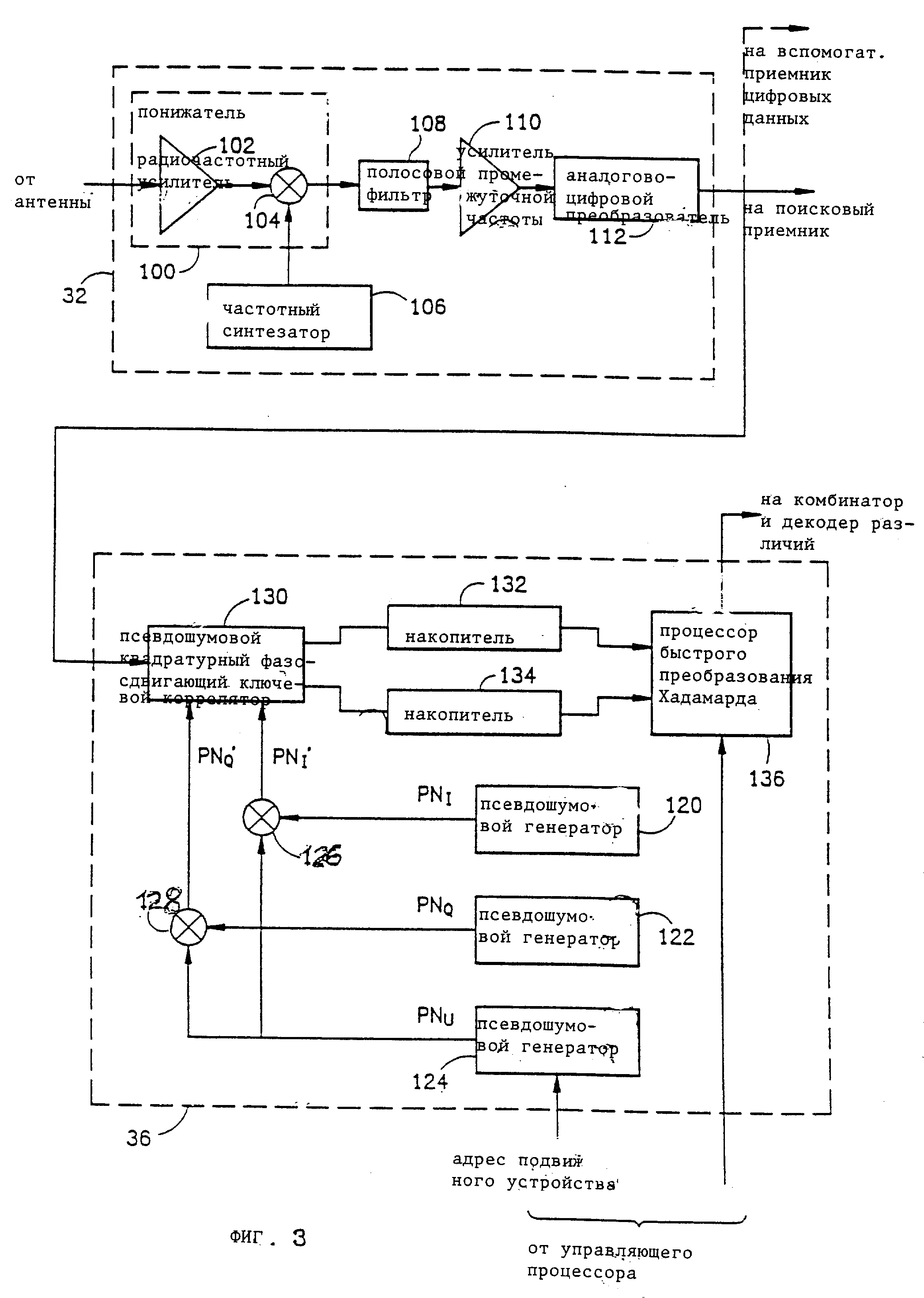
Сигналы, принятые антенной 30, поступают на аналоговый приемник 32. Детали приемника 32 иллюстрирует фиг. 3. сигналы, принятые антенной 30, поступают на понижающий преобразователь 100, который состоит из RF (радиочастотного) усилителя 102 и смесителя 104. Принятые сигналы поступают на вход RF усилителя, который усиливает их и подает на вход смесителя 104. Смеситель имеет другой вход, на который поступает выходной сигнал частотного синтезатора 106. Усиленные RF (радиочастотные) сигналы преобразуются смесителем 104 в сигналы IF (промежуточной частоты путем смешения с выходным сигналом частотного синтезатора).
Затем IF промежуточной частоты сигналы поступают с выхода смесителя 104 на полосовой фильтр 108, которым может быть фильтр поверхностных акустических волн, имеющий полосу пропускания 1,25 МГц, где они фильтруются по полосе. Отфильтрованные сигналы с выхода полосового фильтра 108 поступают на усилитель промежуточной полосы 110, где эти сигналы усиливаются. Усиленные сигналы промежуточной частоты с выхода усилителя промежуточной частоты 110 поступают на аналогово-цифровой преобразователь 112, где они дискретизируются с частотой 9,8304 МГц, которая точно в восемь раз превышает псевдошумовую чиповую частоту. Хотя аналогово-цифровой преобразователь 112 изображен как часть приемника 32, он вместо этого может быть частью приемника данных и поискового приемника. Отцифрованные промежуточной частоты сигналы от аналогово-цифрового преобразователя 112 поступают на приемник данных 36, вспомогательный приемник данных 38 и поисковый приемник 34. Выходными сигналами приемника 32 являются сигналы синфазного и квадратурного каналов, о которых будет сказано ниже. Хотя на фиг. 3 аналогово-цифровой преобразователь 112 изображен как отдельное устройство с последующим разделением сигналов на синфазный и квадратурный каналы, можно видеть, что разделение каналов может быть выполнено перед отцифрованием двумя отдельными аналогово-цифровыми преобразователями, отцифровывающими синфазный и квадратурный сигналы. Специалистам в данной области известны схемы для преобразования частот с понижением от радиочастот через промежуточную частоту к базовым частотам и аналогово-цифрового преобразования синфазного и квадратурного каналов.
Поисковый приемник 34 используется ячейным узлом для сканирования временной области около принимаемого сигнала, чтобы убеждаться, что ассоциированный приемник цифровых данных 36 и приемник данных 38, если используются, отслеживают и обрабатывают наиболее сильный сигнал временной области. Поисковый приемник 34 подает сигнал на управляющий процессор ячейного узла 48, который подает сигналы на приемники цифровых данных 36 и 38 для селекции подходящего принятого сигнала для обработки.
Обработка сигналов в приемниках данных ячейного узла и поисковом приемнике ячейного узла во многом отличается от обработки сигналов аналогичными элементами в подвижном устройстве. Во входящей, или обратной, линии, т.е. от подвижного устройства до ячейного узла, подвижное устройство не передает контрольный сигнал, который может быть использован для обеспечения когерентности при обработке сигналов ячейным узлом. Линия от подвижного устройства до ячейного узла отличается некогерентной модулирующей и демодулирующей схемой, использующей 64 двоичную, ортогональную сигнализацию.
При 64 двоичной ортогональной обработке сигналов символы, передаваемые подвижным устройством, кодируются в одну из 26, т.е. 64, различных двоичных последовательностей. Набор выбранных последовательностей известен как функции Уолша. Оптимальной функцией для кодирования m двоичных функций Уолша является быстрое преобразование Хадарда.
Вернемся вновь к фиг. 2; поисковый приемник 34 и приемники цифровых данных 36 и 38 принимают сигналы, поступающие от аналогового приемника 32. Чтобы декодировать спектрально расширенные сигналы, переданные на приемник конкретного ячейного узла, через посредство которого подвижное устройство держит связь, должна быть сгенерирована подходящая псевдошумовая последовательность. Более подробно о генерировании сигналов подвижным устройством сказано ниже.
Как иллюстрирует фиг. 3, приемник 36 включает в себя два псевдошумовых генератора 120 и 122, которые генерируют две различные последовательности коротких псевдошумовых кодов одинаковой длины. Эти две псевдошумовые последовательности являются общим для всех приемников ячейного узла и всех подвижных устройств в отношении внешнего кода модулирующей схемы, о чем будет более подробно сказано ниже. Псевдошумовые генераторы 120 и 122 создают соответственно выходные последовательности PNI и PNQ. Последовательности PNI и PNQ называются псевдошумовыми последовательностями синфазного (I) и квадратурного (Q) каналов. Две псевдошумовые последовательности PNI и PNQ генерируются различными полиномами степени 15, увеличенные для создания последовательностей длиной 32768, а не 32767 обычно получаемой. Например, приращение может проявиться в форме добавления одного нуля к серии из четырнадцати нулей в строке, которая появляется один раз в каждой максимальной длины линейной последовательности степени 15. Другими словами, одно состояние псевдошумового генератора будет повторяться при генерировании этой последовательности. Поэтому модифицированная последовательность содержит одну серию из пятнадцати единиц и одну серию из пятнадцати нулей.
В описываемом варианте осуществления приемник 36 также включает в себя генератор 124 длинных псевдошумовых кодов, который генерирует PNU последовательностью, соответствующую псевдошумовой последовательности, генерируемой подвижным устройством в линии подвижное устройство - ячейный узел. Псевдошумовой генератор 124 может быть генератором максимальной длины линейных последовательностей, который генерирует пользовательский псевдошумовой код, который очень длинен, например, степени 42, сдвинут во времени в соответствии с дополнительным фактором, подобным адресу подвижного устройства или идентификатору пользователя JD, для обеспечения различия пользователей. Таким образом, принимаемый ячейным узлом сигнал модулируется одновременно последовательностью длинных псевдошумовых кодов PNU и последовательностями коротких кодов PNI и PNQ. Альтернативно, нелинейный шифрующий генератор, подобный шифратору, применяющему стандарт шифрования данных (DES) для шифрования 64-символьного представления универсального времени, использующего специальный ключ пользователя, можно использовать вместо псевдошумового генератора 124.
Последовательность PNU, выделяемая псевдошумовым генератором 124, объединяется операцией Исключающее ИЛИ с последовательностями PNI и PNQ соответственно на вентилях исключающее ИЛИ 126 и 128 для получения последовательностей PN'I и PN'Q.
Последовательности PN'I и PN'Q поступают на псевдошумовой сдвигающий квадратурно-фазово-ключевой коррелятор 130 вместе с сигналами I и Q каналов, поступающих от приемника 32. Коррелятор 130 используется для коррелирования данных I и Q. каналов с последовательностями PN'I и PN'Q. Скоррелированные коррелятором 130 выходы каналов I и Q попадают на накопители 132 и 134, где символьные данные накапливаются за период 4 чипа. Выходные сигналы накопителей 132 и 134 поступают на входы процессора "Быстрого преобразования Хадамарда" 136. Процессор "быстрого преобразования Хадамарда" 136 создает набор из 64 коэффициентов на каждые 6 символов. Затем 64 коэффициента умножаются на весовую функцию, генерируемую управляющим процессором 48. Весовая функция зависит от силы демодулируемого сигнала. Взвешенные данные, выдаваемые процессором "быстрого преобразования Хадамарда" 136, поступают на схему комбинатора и декодера различий 50 (смотри фиг. 2) для дальнейшей обработки.
Вторая приемная система обрабатывает принятые сигналы точно так, как это описано относительно первой приемной системы со ссылками на фиг. 2 и фиг. 3. Взвешенные 64 символа, выдаваемые приемниками 36 и 46, поступают на схему комбинатора и декодера различий 50. Схема 50 включает в себя сумматор, который складывает 64 коэффициента, поступившие от приемника 36, с взвешенными коэффициентами, поступившими от приемника 46. Результирующие 64 коэффициента сравниваются один с другим для обнаружения наибольшего коэффициента. Значение результата сравнения и идентификатор наибольшего из 64 коэффициентов используются для определения набора весов декодера и символов для использования внутри декодера алгоритма Витерби, встроенного в схему 50.
Декодер Витерби, встроенный в схему 50, способен декодировать данные, закодированные на подвижном устройстве, с ограничивающей длиной K = 9 и кодовой скоростью r = 1/3. Декодер Витерби применяется для обнаружения наиболее вероятной информационной битовой последовательности. Периодично, именно через 1,25 мсек., формируется оценка качества сигнала и передается в качестве регулирующей мощность подвижного устройства команды вместе с данными на подвижное устройство. Более подробную информацию о генерировании этой оценки качества можно найти в одновременно поданной заявке, названной выше. Эта оценка качества является отношением сигнал/шум, усредненным на интервале 1,25 мсек.
Каждый приемник данных следит за тактированием принимаемого сигнала. Это осуществляется хорошо известным способом коррелирования принимаемого сигнала с слегка упреждающим местным эталонным псевдошумом и коррелирования принимаемого сигнала с слегка запаздывающим местным эталонным псевдошумом. Разница между этими двумя корреляциями должна быть равна нулю, если нет ошибки тактирования. Наоборот, если есть ошибка тактирования, то эта разница укажет значение и знак ошибки, по которым можно отрегулировать тактирование приемника.
Ячейный узел дополнительно содержит антенну 62, которая соединена с приемником глобальной позиционирующей системы 64. Приемник глобальной 64 позиционирующей системы обрабатывает сигналы, принимаемые антенной 62 от спутников, входящих в состав спутниковой навигационной системы Навстар Глобал Позишнинг Систем, выдавая тактирующие сигналы, соответствующие Универсальному скоординированному времени. Приемник глобальной позиционирующей системы 64 подает эти тактирующие сигналы на управляющий процессор 48 для тактирования синхронизации на ячейном узле, о чем было сказано выше.
В схему, изображенную на фиг. 2, может быть встроен вспомогательный приемник цифровых данных 38 для улучшения эксплуатационных характеристик системы. Конструкция и работа этого приемника аналогичны таковым, описанным со ссылками на приемники данных 36 и 46. Приемник 38 можно использовать на ячейном узле для создания дополнительных режимов различения. Этот дополнительный приемник данных один или в комбинации с дополнительными приемниками может отслеживать и принимать другие возможные сигналы, передаваемые подвижным устройством и приходящие с задержками по другим путям. Вспомогательные дополнительные приемники цифровых данных, подобные приемнику 38, обеспечивают реализацию дополнительных режимов различения, которые исключительно полезны для тех ячейных узлов, которые размещены в загроможденных городских районах, где возможно появление многопутных сигналов.
Сигналы от подвижной телефонной станции поступают на подходящий передаточный модулятор по цифровой линии 52 под управлением управляющего процессора 48. Передаточный модулятор 54 под управлением управляющего процессора 48 модулирует спектральным расширением данные для передачи на адресуемое подвижное устройство-излучатель. Детали конструкции и принцип работы передаточного модулятора 54 описаны ниже со ссылками на фиг. 4.
Выходной сигнал передаточного модулятора 54 поступает на управляющую мощность передачи схему 56, которая под управлением управляющего процессора 48 управляет мощностью передачи. Выходной сигнал схемы 56 поступает на сумматор 57, который суммирует его с выходом передаточного модулятора и выходом управляющей мощностью передачи схемы, направляемыми на другие подвижные устройства в ячейке. Выход сумматора 57 поступает на усиливающую мощность передачи схему 58 для пересылки на антенну 60 для излучения на подвижные устройства, находящиеся в обслуживаемом ячейным узлом районе. На фиг. 2 также изображены генераторы контрольного и управляющего каналов и управляющая мощностью передачи схема, которые обозначены общей позицией 66. Схема 66 под управлением управляющего процессора 48 генерирует и управляет мощностью контрольным сигналом, синхронизирующим каналом и страничным каналом для соединения со схемой 58 и вывода на антенну 60.
Блок-схема описываемого варианта осуществления передатчика ячейного узла изображена на фиг. 4. Передатчик включает в себя пару псевдошумовых последовательностных генераторов, используемых для генерирования внешнего кода. Эти псевдошумовые генераторы генерируют две различные псевдошумовые (PN) последовательности, а именно: PNI и PNQ последовательности, о которых было сказано со ссылками на фиг. 3. Однако эти PNI и PNQ последовательности задерживаются во времени в соответствии с адресом сектора или ячейки.
На фиг. 4 более детально изображена передающая схема, представленная фиг. 3, с контрольными, синхронизирующим, страничными и речевыми канальными сигналами. Передающая схема имеет два псевдослучайных шумовых генератора, псевдошумовой генератор 196 и псевдошумовой генератор 198, которые генерируют PNI и PNQ последовательности. Псевдошумовые генераторы 196 и 198 соответственно реагируют на входной сигнал, соответствующий сигналу секторного или ячейного адреса, поступающему от управляющего процессора, для создания предопределенной временной задержки псевдошумовым последовательностям. Эти задержанные во времени PNI и PNQ последовательности относятся соответственно к синфазному (I) и квадратурному (Q) каналам. Хотя изображены только два псевдошумовых генератора для генерирования соответственно PNI и PNQ последовательностей для соответствующих каналов ячейного узла или сектора, должно быть понятно, что можно встроить много других псевдошумовых генераторов. Например, в несекторизированной ячейке пару псевдошумовых генераторов можно предусмотреть для каждого из контрольного, синхронизирующего, страничного и речевого каналов для генерирования синхронно PNI и PNQ последовательностей, применяемых во внешнем коде. Такой вариант может иметь преимущество, поскольку позволяет избежать распределение PNI и PNQ последовательностей по большому числу схем.
В предпочтительном варианте осуществления кодирование функциями Уолша канальных сигналов используется в качестве внутреннего кода. В описываемом варианте имеется всего 64 различные последовательности Уолша, из которых три последовательности выделены для контрольной, синхронизирующей и страничной канальных функций. В синхронизирующем, страничном и речевом каналах входные данные кодируются свертыванием и затем перемежаются, как это хорошо известно специалистам. Далее, закодированные свертыванием данные также подвергаются повторению перед перемежанием, как хорошо известно специалистам.
В контрольном канале данные не подвергаются модулированию, и он характеризуется как немодулированный расширенный спектрально сигнал, которым пользуются все пользователи конкретного ячейного узла или сектора для целей приема или слежения. Каждая ячейка и, если ячейка разделена, каждый сектор обладают уникальным контрольным сигналом. Однако было осознано, что вместо использования различных псевдошумовых генераторов для генерирования контрольных сигналов лучше генерировать различные контрольные сигналы путем сдвигов одной и той же базовой последовательности. Реализуя этот способ, подвижное устройство последовательно просматривает всю последовательность и настраивается на смещение или сдвиг, который обеспечивает сильнейшую корреляцию. При использовании сдвигов базовой последовательности эти сдвиги должны быть таковы, что контрольные сигналы в соседних ячейках или секторах не интерферируют или подавляются.
Контрольная последовательность должна быть длинной настолько, чтобы можно было бы генерировать сдвигами базовой последовательности много различных последовательностей для обеспечения наличия большого числа контрольных сигналов в системе. Далее, разделение или сдвиги должны быть достаточно большими, чтобы гарантировалось отсутствие интерференции контрольных сигналов. Поэтому в описываемом варианте осуществления настоящего изобретения для контрольной последовательности выбрана длина 215. Последовательность генерируется, начиная с последовательности 215 - 1 с дополнительным нулем (0), который добавляется к последовательности, когда обнаруживается некоторое конкретное состояние. В описываемом варианте осуществления имеется 512 различных контрольных сигналов с смещением базовой последовательности в 64 чипа. Однако такие смещения могут быть целыми кратными 64 чипового смещения при соответствующем уменьшении числа различных контрольных сигналов.
Для генерирования контрольного сигнала используется "нулевая" последовательность Уолша (W0), состоящая из одних нулей, чтобы не модулировать контрольный сигнал, который представляет собой существенно PNI и PNQ последовательности. Поэтому нулевая последовательность Уолша (W0) умножается на последовательности PNI и PNQ на вентилях исключающее ИЛИ. Поэтому результирующий контрольный сигнал содержит исключительно PNI и PNQ последовательности. Поскольку все ячейки и сектора имеют одну и ту же псевдошумовую последовательность для контрольного сигнала, различающим признаком для определения источника передачи между ячейками или секторами является фаза этой последовательности.
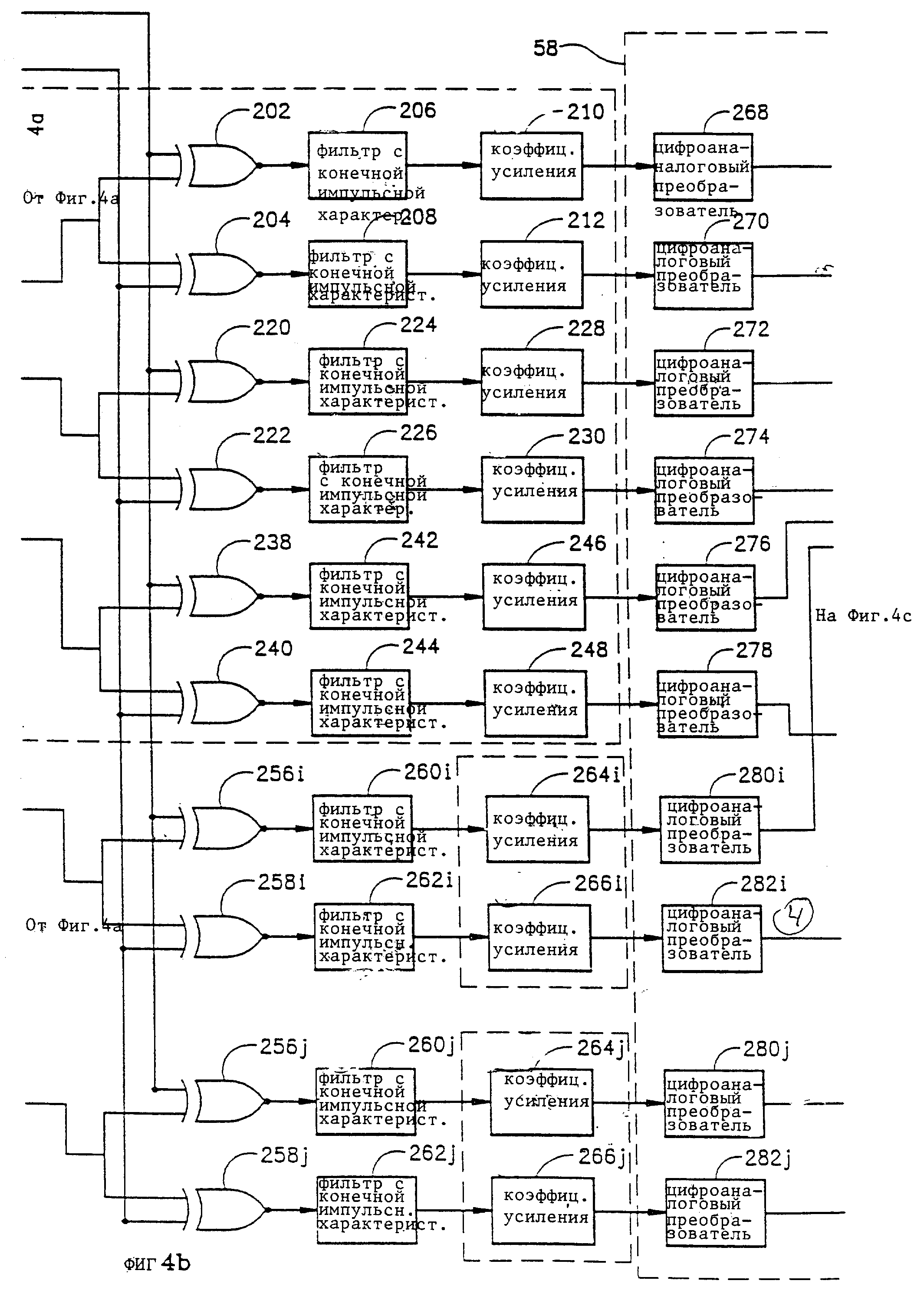
Что касается части передаточного модулятора и управляющей мощностью схемы 66, касающейся контрольного канала, генератор Уолша (W0) 200 генерирует сигнал, соответствующий полностью нулевой функции, как сказано выше. Тактирование при генерировании функции Уолша выполняется управляющим процессором, который также тактирует все генераторы функций Уолша ячейного узла и подвижного устройства. Выходной сигнал генератора 200 поступает в качестве входного сигнала на два вентиля исключающее ИЛИ 202 и 204. Другой вход вентиля исключающее ИЛИ 202 принимает PNI сигнал; на другой вход вентиля исключающее ИЛИ 204 поступает PNQ сигнал. PNI и PNQ сигналы объединяются операцией исключающее ИЛИ с выходным сигналом генератора 200 и поступают в качестве входных сигналов на фильтры с конечной импульсной характеристикой 206 и 208. Отфильтрованные сигналы, выдаваемые фильтрами с конечной импульсной характеристикой 206 и 208, поступают на управляющую мощность передачи схему, состоящую из управляющих усилением элементов 210 и 212. Сигналы, поступающие на управляющие усилением элементы 210 и 212, усиливаются по входным сигналам (не изображены), поступающим от управляющего процессора. Сигналы, идущие от управляющих усилением элементов, поступают на усиливающую мощность передачи схему 58, подробное описание которой дано ниже.
Информация синхронизирующего канала кодируется и затем умножается на вентилях исключающее ИЛИ на предписанную последовательность Уолша. В описываемом варианте осуществления выбранной функцией Уолша является (W32), которая состоит из последовательности 32 "единиц", за которыми следуют 32 "нуля". Затем результирующая последовательность умножается на PNI и PNQ последовательности вентилями исключающее ИЛИ. В описываемом варианте осуществления информация синхронизирующего канала поступает на передаточный модулятор, как правило, со скоростью 1200 б/с. В описываемом варианте осуществления данные синхронизирующего канала предпочтительно кодируются свертыванием со скоростью r = 1/2 при ограничительной длине K = 9, причем каждый кодовый символ повторяется дважды. Эти кодирующие скорость и ограничительная длина являются общими для всех прямых закодированных связных каналов, т.е. для синхронизирующего, страничного и речевого. В описываемом варианте осуществления конструкция типа сдвиговых регистров применена для построения генераторов кода C = 753 (восьмеричное) и C = 561 (восьмеричное). Скорость передачи символов в синхронизирующем канале в описываемом варианте осуществления принята равной 4800 символов/сек, т.е. один символ занимает 208 мкс или 256 псевдошумовых чипов.
Кодовые символы перемежают свертывающим перемежателем, который в описываемом варианте осуществления имеет цикл 40 мсек. Существенными параметрами перемежателя являются I = 16 и J = 48. Дополнительную информацию о перемежании можно найти в Дейта Коммюникейшн, Нетуорк энд Системз, Хоуард У. Самз анд Ко., 1987, страницы 343-352. Свертывающий перемежатель предназначен распределять ненадежные канальные символы таким образом, что любые два символа непрерывной последовательности из I-1 или меньше символов разделяются по крайней мере J + 1 символами в выходном сигнале обратного перемежателя. Аналогично, любые два символа в непрерывной последовательности из J - 1 символов разделяются, по крайней мере, I + 1 символами в выходном сигнале обратного перемежателя. Другими словами, если I = 16 и J = 48, в последовательности из 15 символов символы передаются с интервалом 885 мкс, что создает временное различие.
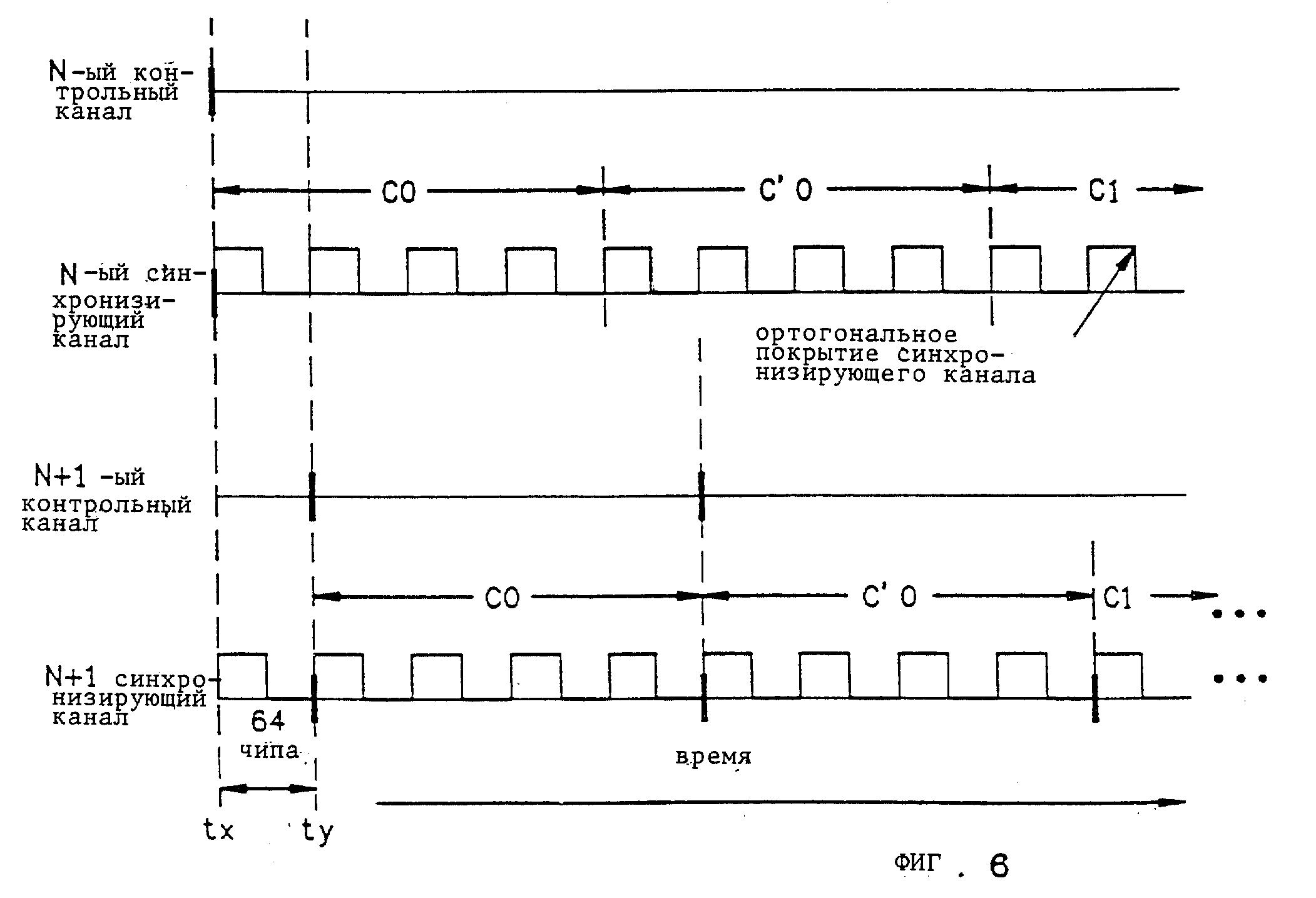
Символы синхронизирующего канала некоторой конкретной ячейки или сектора привязаны к соответствующему контрольному сигналу этой ячейки или сектора. Фиг. 5 иллюстрирует тактирование двух различных контрольных каналов (N) и (N + 1), которые отстоят на сдвиг в 64 чипа. Фиг. 5 иллюстрирует пример тактовой диаграммы для примерных контрольного и синхронизирующего каналов, причем состояния фактических чипов контрольного сигнала и символов синхронизирующего канала не изображены. Каждый синхронизирующий канал начинает новый цикл перемежателя с первого кодового символа (cx) пары кодовых символов (cx, cx), поскольку код повторяется дважды, который сдвинут относительно абсолютного времени на величину, равную соответствующему контрольному каналу.
Как видно на фиг. 5, контрольный канал N начинает новый цикл перемежателя или контрольную синхронизацию в момент tx. Аналогично, контрольный канал N+1 начинает новый цикл перемежателя или контрольную синхронизацию в момент ty, который наступает во времени на 64 чипа позже, чем момент tx. В описываемом варианте осуществления контрольный цикл длится 26,67 мсек, что соответствует 128 кодовым символам синхронизирующего канала или 32 информационным битам синхронизирующего канала. Символы синхронизирующего канала перемежают свертывающим перемежателем, который перекрывает 26,67 мсек. Поэтому, когда подвижное устройство приняло контрольный сигнал, оно немедленно синхронизирует перемежатель синхронизирующего канала.
Символы синхронного канала покрываются предварительно выделенной последовательностью Уолша для придания сигналу ортогональности. В синхронизирующем канале один кодовый символ перекрывает четыре покрывающих последовательности, т.е. один кодовый символ соответствует четырем повторам последовательности "32 единицы" - "32 нуля", как иллюстрирует фиг. 6. Как иллюстрирует фиг. 6, одиночная логическая "единица" представляет 32 "единичных" чипа Уолша, и одиночный логический "ноль" представляет 32 "нулевых" чипа Уолша. Ортогональность в синхронизирующем канале сохраняется, даже если символы синхронного канала оказываются смещенными относительно абсолютного времени в зависимости от ассоциированного контрольного канала, поскольку сдвиги синхронизирующих каналов являются целыми кратными рамки Уолша.
В описываемом варианте осуществления сообщения синхронного канала имеют переменную длину. Длина сообщения является целым кратным 80 мсек, что соответствует 3 контрольным циклам. В информационные биты синхронизирующего канала добавлены биты циклической избыточности для обнаружения ошибок.
Фиг. 7 иллюстрирует в форме тактовой диаграммы тактирование описываемой системы. На периоде в две секунды укладываются 75 контрольных циклов. На фиг. 7 N-ный контрольный и синхронизирующий каналы соответствуют сектору или ячейке, использующей несдвинутый контрольный сигнал, в результате чего контрольный и синхронизирующие сигналы точно совмещены с универсальным скоординированным временем. Импульс синхронизации контрольного сигнала, т.е. исходное состояние, точно совпадает с общим сигналом 1 импульс/сек.
Вор всех случаях, когда используется сдвинутый контрольный сигнал, вводится псевдошумовое фазовое смещение, соответствующее сдвигу контрольного сигнала. Другими словами, импульс синхронизации контрольного сигнала (исходное состояние) и сообщения синхронизирующего канала оказываются сдвинутыми относительно 1 импульс/сек сигналов. Синхронизирующие сообщения несут информацию об этом фазовом сдвиге, чтобы подвижное устройство могло должным образом отрегулировать свое тактирование.
Как только будет правильно получено сообщение синхронизирующего канала, подвижное устройство способно немедленно синхронизировать либо страничный канал, либо речевой канал. По импульсу контрольной синхронизации, соответствующему концу каждого синхронизирующего сообщения, начинается новый 40 мсек, цикл перемежания. В этот момент подвижное устройство начинает обратное перемежание первого кодового символа, либо кодового повтора, либо (cx, cx+1) пары при достижении синхронизма декодера. Адрес записывания обратного перемежателя устанавливается изначально в 0, и адрес считывания обратного перемежателя устанавливает изначально на J, достигается синхронизация памяти обратного перемежателя.
Сообщения синхронизирующего канала несут информацию, касающуюся состояния 42-битовой длины псевдошумового генератора для речевого канала, выделенного для коммуникации с этим подвижным устройством. Эта информация используется приемниками цифровых данных подвижного устройства для синхронизации соответствующих псевдошумовых генераторов. Например, на фиг. 7 (N+1) сообщение синхронизирующего канала содержит 42-битовое поле, которое указывает состояние, состояние X, которое обретет длиннокодовый псевдошумовой генератор соответствующего секторного или ячейного речевого канала через определенное время спустя, например после 160 мсек. Подвижное устройство после успешного декодирования сообщения синхронизирующего канала загружает в должный момент длиннокодовый псевдошумовой генератор состоянием X. Таким образом, длиннокодовый псевдослучайный генератор подвижного устройства синхронизируется, чтобы обеспечивалась расшифровка адресуемых пользователю сообщений.
Что касается части блока 66, содержащего передаточный модулятор и управляющую мощность схему, которая работает с синхронизирующим каналом, то информация синхронизирующего канала передается от управляющего процессора на кодер 214. В описываемом варианте осуществления данные синхронизирующего канала кодируются свертыванием кодером 214. Кодер 214 также выполняет повторы закодированных символов, если закодированные символы синхронизирующего канала должны повторяться. Символы, выдаваемые кодером 214, поступают на перемежатель 215, который выполняет перемежание свертыванием поступающих символов. Перемеженные символы с выхода перемежателя 215 поступают на вход вентиля исключающее ИЛИ 216.
Генератор Уолша 218 генерирует сигнал, соответствующий последовательности Уолша (W32), который поступает на другой вход вентиля исключающее ИЛИ 216. Поток символов синхронизирующего канала и последовательность Уолша (W32) объединяются операцией исключающее ИЛИ, выполняемой вентилем исключающее ИЛИ 216, результат которой поступает на выходы двух вентилей исключающее ИЛИ 220 и 222.
Другой вход вентиля исключающее - ИЛИ 220 принимает сигнал, другой вход вентиля исключающее ИЛИ 222 принимает PNI PNQ сигнал. PNI и PNQ сигналы соответственно объединяются операцией исключающее или с выходным сигналом вентиля исключающее ИЛИ 216 и соответственно поступают на входы фильтров с конечной импульсной характеристикой 224 и 226. Отфильтрованные сигналы с выходов фильтров с конечной импульсной характеристикой 224 и 226 поступают на управляющую мощностью передачи схему, составленную из управляющих коэффициентом усиления элементов 228 и 230. Сигналы, поступающие на управляющие коэффициентом усиления элементы 228 и 230, цифровым способом усиливаются в ответ на входные цифровые сигналы (не изображены), поступающие от управляющего процессора. Сигналы с выходов управляющих коэффициентом усиления элементов 228 и 230 поступают на усиливающую мощность передачи схему 58.
Информация страничного канала также кодируется с повторением, перемежанием и последующим умножением на предварительно выделенную последовательность Уолша. Результирующая последовательность умножается на PNI и PNQ последовательности. Скорость передачи данных страничного канала для конкретного сектора или ячейки указывается в выделенном поле сообщения синхронизирующего канала. Хотя скорость передачи данных страничного канала может быть переменной, в описываемом варианте осуществления она имеет для каждой системы одно из фиксированных значений: 9,6; 4,8; 2,4 и 1,2 Кб/с.
Что касается передаточного модулятора и управляющей мощностью схемы страничного канала, то страничная канальная информация поступает от управляющего процессора на кодер 232. В описываемом варианте осуществления кодер 232 представляет собой свертывающий кодер, который также выполняет повторы символов в соответствии с предписанной скоростью передачи данных этого канала. Выходной сигнал кодера 232 поступает на перемежатель 233, где символы перемежают свертыванием. Выходной сигнал перемежателя 233 поступает на вход вентиля исключающее ИЛИ 234. Хотя скорость передачи данных страничного канала изменяется, скорость передачи кодовых символов удерживается постоянной на 19,2 ксимволов/сек путем повторения кодов.
Генератор Уолша 236 генерирует сигнал, соответствующий предварительно выделенной последовательности Уолша, который поступает на другой вход вентиля исключающее ИЛИ 234. Символьные данные и последовательность Уолша объединяются операцией исключающее ИЛИ, выполняемой вентилем исключающее ИЛИ 234, и поступает на выходы двух вентилей исключающее ИЛИ 238 и 240.
Другой вход вентиля исключающее ИЛИ 238 принимает PNI сигнал, другой вход вентиля исключающее ИЛИ 240 принимает PNQ сигнал. PNI и PNQ сигналы соответственно объединяются операцией исключающее ИЛИ с выходным сигналом вентиля исключающее ИЛИ 234 и поступают соответственно на входы фильтров с конечной импульсной характеристикой 242 и 244. Отфильтрованные сигналы с выходов фильтров с конечной импульсной характеристикой поступают на управляющую мощностью передачи схему, составленную из управляющих коэффициентов усиления элементов 246 и 248. Сигналы, поступающие на управляющие коэффициентом усиления элементы 246 и 248, усиливаются в ответ на входные сигналы (не изображены), поступающие от управляющего процессора. Сигналы с выходов управляющих коэффициентом усиления элементов поступают на усиливающую мощность передачи схему 58.
Данные каждого речевого канала также кодируются с повторением, перемежаются, шифруются, умножаются на выделенную последовательность Уолша (Wi - Wj) и затем умножаются на PNI и PNQ последовательности. Последовательность Уолша, которой должен пользоваться конкретный канал, выделяется системным контроллером во время установления соединения точно так, как выделяются каналы для соединений в аналоговой частотно-модулирующей ячеистой системе. В описываемом варианте осуществления вплоть до 61 различных последовательностей Уолша имеется в наличии для использования речевыми каналами.
В описываемом варианте осуществления настоящего изобретения речевой канал использует переменную скорость передачи данных. Использование переменной скорости передачи данных обусловлено желанием снижать скорость передачи данных, когда отсутствует речевой сигнал, для уменьшения интерференции, создаваемой этим конкретным речевым сигналом для других пользователей. Подробный вокодер генерирует данные на четырех различных скоростях передачи данных, учитывая речевую активность в рамках по 20 мсек каждая. Примерами скоростей передачи данных являются: 9,6 кб/с, 4,8 кб/с, 2,4 кб/с и 1,2 кб/с. Хотя скорость передачи данных может меняться каждые 20 мсек, скорость передачи кодовых символов удерживается постоянной путем кодовых повторов на уровне 19,2 ксимвола/сек. Поэтому кодовые символы повторяются 2, 4 или 8 раз при скорости передачи данных соответственно 4,8 кб/с, 2,4 кб/с и 1,2 кб/с.
Поскольку схема с переменной скоростью передачи разработана для уменьшения интерференции, кодовые символы на пониженных скоростях передачи должны обладать меньшей энергией. Например, для приведенных скоростей передачи данных 9,6 кб/с, 4,8 кб/с, 2,4 кб/с и 1,2 кб/с энергия кодового символа (ES) будет равна соответственно Eb/2, Eb/4, Eb/8 и Eb/16, где Eb является энергией информационного бита при скорости передачи 9,6 кб/с.
Кодовые символы перемежают свертывающим перемежателем таким образом, что кодовые символы с различными энергетическими уровнями оказываются перемешанными перемежателем. Чтобы можно было опознать энергетический уровень, кодовый символ должен обладать меткой, прикрепленной к каждому символу, специфицирующей его скорость передачи для целей масштабирования. После ортогонального покрытия функциями Уолша и псевдошумового расширения квадратурные каналы цифровым образом фильтруются фильтром с конечной импульсной характеристикой. Фильтр с конечной импульсной характеристикой должен получать сигнал, соответствующий уровню символьной энергии, чтобы выполнять энергетическое масштабирование в соответствии со скоростью передачи данных. Синфазный (I) и квадратурный (Q) каналы масштабируются коэффициентами: 1,


На фиг. 4 изображена схема двух речевых каналов (i) и (j). Данные речевого канала (i) поступают от ассоциированного вокодера (не изображен) на передаточный модулятор 54 (смотрите фиг. 2). Передаточный модулятор 54 состоит из кодера 250i, перемежателя 251i, вентилей исключающее ИЛИ 252i, 255i, 256i и 258i, псевдошумового генератора 253 и генератора Уолша (Wi) 254.
Данные речевого канала (i) поступают на кодер 250i, где, как это предусмотрено для описываемого варианта осуществления, они кодируются свертыванием с повторением кодовых символов в соответствии со скоростью входных данных. Затем закодированные данные поступают на перемежатель 251i, где, как это предусмотрено для описываемого варианта осуществления, они перемежают свертыванием. Перемежатель 251i также принимает от вокодера, ассоциированного с речевым каналом (i) двухбитную метку скорости данных, которая перемежена с символьными данными, для идентификации скорости передачи данных для фильтров с конечной импульсной характеристикой. Метка скорости данных не передается. На подвижном устройстве декодер проверяет все возможные коды. Перемеженные символьные данные с выхода перемежателя 251 с примерной скоростью 19,2 ксимволов/сек поступают на вход вентиля исключающее ИЛИ 252.
В описываемом варианте осуществления каждый сигнал речевого канала шифруется для обеспечения повышенной секретности передач от ячейки на подвижное устройство. Хотя такое шифрование не является необходимостью, оно повышает секретность коммуникаций. Например, шифрование сигналов речевого канала можно осуществить псевдошумовым кодированием, причем псевдошумовой код определяется по адресу подвижного устройства или идентификатора пользователя. Подобное шифрование может быть осуществлено схемой шифрования или PNU последовательностей, как это описано со ссылками на фиг. 3 применительно к конкретному приемнику для коммуникаций по линии "подвижное устройство - ячейный узел". Соответственно можно использовать отдельный псевдошумовой генератор для этой функции, как иллюстрирует фиг. 4. Хотя шифрование описано со ссылками на псевдошумовую последовательность, оно может быть реализовано другими способами, включая хорошо известные специалистам.
Вновь обратимся к фиг. 4; шифрование сигнала речевого канала (i) может быть осуществлено с помощью псевдошумового генератора 253i, который принимает присвоенный подвижному устройству адрес от управляющего процессора. Псевдошумовой генератор 253i генерирует уникальный псевдошумовой код, который поступает на другой вход вентиля исключающее ИЛИ 255i. Сигнал с выхода вентиля исключающее ИЛИ 255i поступает на один из входов вентиля исключающее ИЛИ 252i.
Генератор Уолша (Wi) 254 генерирует, реагируя на выбирающий функцию сигнал и тактовые сигналы от управляющего процессора, сигнал, соответствующий предварительно выделенной последовательности Уолша. Значение выбирающего функцию сигнала может определяться по адресу подвижного устройства. Сигнал последовательности Уолша поступает на другой вход вентиля исключающее ИЛИ 252i. Зашифрованные символьные данные и последовательность Уолша объединяются операцией исключающее ИЛИ, исполняемой вентилем исключающее ИЛИ 252i, и ее результат поступает на входы двух вентилей исключающее ИЛИ 256i и 258i. Псевдошумовой генератор 253i вместе с другими генераторами псевдослучайного шума и генераторами Уолша, размещенными на ячейном узле, генерируют выходные сигналы с частотой 1,2288 МГц. Следует заметить, что псевдошумовой генератор 253i включает в себя дециматор, который генерирует выходной сигнал на частоте 19,2 КГц, поступающий на вентиль исключающее ИЛИ 255i.
Другой вход вентиля исключающее ИЛИ 256i принимает PNI сигнал, другой вход вентиля исключающее ИЛИ 258 принимает PNQ сигнал. PNI и PNQ сигналы соответственно объединяются операцией исключающее ИЛИ с выходным сигналом вентиля исключающее ИЛИ 252i и соответственно поступают на входы фильтров с конечной импульсной характеристикой 260i и 262i. Входные сигналы фильтруются в соответствии с входной меткой скорости передачи данных (не изображена), поступающей от свертывающего перемежателя 251i. Отфильтрованные сигналы с выходов фильтров с конечной импульсной характеристикой 260i и 262i поступают на управляющую мощностью передачи схему 56, состоящую из управляющих коэффициентом усиления элементов 264i и 266i. Сигналы, поступающие на управляющие коэффициентом усиления элементы 264i и 266i усиливаются в ответ на входные сигналы (не изображено), идущие от управляющего процессора. Сигналы с выходов управляющих коэффициентом усиления элементов поступают на управляющую мощностью передачи схему 58.
В дополнение к речевым битам речевой канал прямой линии связи несет управляющую мощность передачи информации. В описываемом варианте осуществления скорость передачи управляющих мощностью битов принята равной 800 б/с. Приемник ячейного узла, который демодулирует сигнал линии "подвижное устройство - ячейка" от заданного подвижного устройства, генерирует управляющую мощностью информацию, которая вставляется в речевой канал линии "ячейка - подвижное устройство", адресованный конкретному подвижному устройству. Более подробную информацию об управлении мощностью можно найти в одновременно поданной заявке, названной выше.
Управляющие мощностью биты вставляются в выходной сигнал свертывающего перемежателя способом, называемым пробивкой кодовых символов. Другими словами, когда возникает надобность в передаче управляющего мощностью бита, два кодовых символа заменяются двумя идентичными кодовыми символами с полярностью, задаваемой управляющей мощностью информацией. Более того, управляющие мощностью биты передаются на энергетическом уровне, соответствующем скорости передачи 9600 б/с.
Дополнительное ограничение, накладываемое на управляющий мощностью информационный поток, состоит в том, что размещение этих битов должно быть случайным среди каналов линии "подвижное устройство - ячейка". В противном случае максимальной энергии управляющие мощностью биты порождали бы пики интерференции через регулярные интервалы, снижая различимость таких битов.
На фиг. 4 также изображен речевой канал (j), который функционально и конструктивно идентичен речевому каналу (i). Предполагается, что существует некоторое множество речевых каналов (не изображены), общее число которых в описываемом варианте осуществления равно 61.
Что касается генераторов Уолша, изображенных на фиг. 4, то функции Уолша представляют собой множество ортогональных двоичных последовательностей, которые можно генерировать известными способами. Интересной особенностью функции Уолша является то, что каждая из 64 последовательностей точно ортогональна со всеми другими последовательностями. Любая пара таких последовательностей отличается точно столькими битовыми позициями, сколькими они совпадают, т.е. 32 на интервале из 64 символов. Поэтому, если информация закодирована для передачи последовательностями Уолша, приемник оказывается способным выбирать любую одну из последовательностей Уолша в качестве "желаемого" несущего сигнала. Любая сигнальная энергия, закодированная другими последовательностями Уолша, будет подавляться и не будет взаимно интерферировать с желаемой одной последовательностью Уолша.
В описываемом варианте осуществления линии связи "ячейка - подвижное устройство" синхронизирующий, страничный и речевые каналы, как сказано выше, используют кодирование свертывание с ограничивающей длиной K = 9 и кодовой скоростью r = 1/2, т.е. для каждого информационного бита создаются и передаются два закодированных символа. Помимо кодирования свертыванием применяется свертывающее перемежание символьных данных. Предполагается также использование повторов совместно с кодированием свертыванием. На подвижном устройстве оптимальным декодером для этого типа кода является декодер, реализующий алгоритм мягкого принятия решения Витерби. Известная схема может быть применена в целях декодирования. Результирующие биты декодированной информации поступают на цифровое базовой полосы оборудование, смонтированное на подвижном устройстве.
Вновь вернемся к фиг. 4; схема 58 содержит набор цифроаналоговых преобразователей (D/A) для преобразования цифровой информации, представляющей расширенные PNI и PNQ данные контрольного, синхронизирующего, строчного и речевых каналов, к двоичной форме. В частности, расширенные PNI данные контрольного канала с выхода управляющего коэффициентом усиления элемента 210 поступают на цифроаналоговый преобразователь 268. Цифровые данные с выхода цифроаналогового преобразователя 268 поступают на сумматор 284. Аналогично, выходные сигналы соответствующих управляющих коэффициентом усиления элементов, усиливающих расширенные PNI данные синхронизирующего, строчного и речевых каналов, т.е. управляющих коэффициентом усиления элементов 228, 246i и 264i - 264j, соответственно поступают на цифроаналоговые преобразователи 272, 276 и 280i - 280j, где эти сигналы отцифровываются и поступают на сумматор 284. Расширенные PNQ данные для контрольного, синхронного, строчного и речевых каналов с выходов управляющих коэффициентом усиления элементов 212, 230, 248 и 266i - 266j поступают соответственно на цифроаналоговые преобразователи 270, 274, 278 и 282i - 282j, где сигналы отцифровываются, и пересылаются на сумматор 286.
Сумматор 284 суммирует расширенные PNi данные для контрольного, синхронизирующего, страничного и речевых каналов; сумматор 286 суммирует расширенные PNQ данные для тех же самых каналов. Суммированные данные 1 (синфазного) и Q (квадратурного) каналов совместно с частотными сигналами местного осциллятора sin(2πft) и cos(2πft) поступают на смесители 288 и 290, где они смешиваются и откуда передаются на сумматор 292. Частотные сигналы местного осциллятора (LO) sin(2πft) и cos(2πft) поступают от подходящих источников частоты (не изображены). Эти смешанные промежуточной частоты сигналы суммируются на сумматоре 292 и поступают на смеситель 294.
Смеситель 294 смешивает сигнал с радиочастотным сигналом, генерируемым частотным анализатором 296, чтобы обеспечивался переход в полосу радиочастот. Радиочастотный сигнал, выдаваемый смесителем 294 фильтруется по полосе полосовым фильтром 298 и поступает на радиочастотный усилитель 299. Усилитель 299 усиливает ограниченной полосы сигнал в соответствии с входным управляющим коэффициентом сигналом, идущим от управляющей мощностью передачи схемы 56 (смотрите фиг. 3). Следует понимать, что изображенная усиливающая мощность передачи схема 58 служит исключительно иллюстративным целям, поскольку допускает разнообразные модификации при суммировании, смешивании, фильтровании и усилении сигналов, как это хорошо известно специалистам.
Управляющий процессор ячейного узла 48 (смотри фиг. 3) занимается выделением приемников цифровых данных и передаточных модуляторов каждому конкретному вызову. Управляющий процессор 48 также наблюдает за ходом соединения, качеством сигналов и инициирует разъединение при потере сигнала. Ячейный узел обменивается сообщениями с мобильной телефонной станцией по линии 52, с которой он соединен известной телефонной проводкой, оптическим волокном или микроволновой линией.
Фиг. 8 представляет в блочной форме оборудование, используемое на мобильной телефонной станции. Мобильная телефонная станция обычно содержит системный контроллер или управляющий процессор 300, цифровой переключатель 302, комбинатор различий 304, цифровой вокодер 306 и цифровой переключатель 308. Между цифровыми переключателями 302 и 308 включены дополнительные комбинаторы различий и цифровые вокодеры, хотя они и не изображены.
Когда активен режим различения ячейных узлов, вызов обрабатывается двумя ячейными узлами. Поэтому сигналы будут поступать на мобильную телефонную станцию более чем от одного ячейного узла с фактически одинаковой информацией. Однако, поскольку существует фединг и интерференция на входящей или обратной линии от подвижного устройства на ячейные узлы, сигнал от одного ячейного узла может быть более высокого качества, чем сигнал от другого ячейного узла.
Цифровой переключатель 302 используется для маршрутизации информационного потока, соответствующего заданному подвижному устройству, от одного или более ячейных узлов на комбинатор различий по сигналу, поступающему от системного управляющего процессора 300. Когда система не находится в режиме различения ячейных узлов, комбинатор различий может быть обойден или запитан одной и той же информацией на каждый входной порт.
Множество соединенных комбинаторов различий и вокодер организованы в параллель, а именно: один (комбинатор) на каждый вызов, подлежащий обработке. Комбинатор различий 304 сравнивает индикаторы качества сигналов, сопровождающие информационные биты, поступающие от двух или более ячейных узлов. Комбинатор различий 304 выбирает биты, соответствующие более качественному ячейному узлу, рамка за рамкой из (поступающей) информации для выдачи на вокодер 306.
Вокодер 306 преобразует цифровой речевой сигнал в стандартный 64 Кб/с импульсно-кодово-модулированный телефонный формат, аналоговый или любой другой стандартный формат. Результирующие сигналы передаются от вокодера 306 на цифровой переключатель 308. Под управлением системного управляющего процессора 300 вызов маршрутизируется на телефонную сеть общего пользования.
Речевые сигналы, поступающие от телефонной сети общего пользования и адресуемые подвижным устройствам, поступают на цифровой переключатель 308 для соединения с подходящим цифровым вокодером, подобным вокодеру 306, под управлением системного управляющего процессора 300. Вокодер 306 кодирует входные цифровые речевые сигналы и направляет результирующий поток информационных битов непосредственно на цифровой переключатель 302. Цифровой переключатель 302 под управлением системного управляющего процессора непосредственно направляет закодированные данные на ячейный узел или ячейные узлы, для которых подвижное устройство передает сообщение. Хотя выше было сказано, что информация, передаваемая на телефонную сеть общего пользования, является по форме аналоговой речевой, можно предположить, что в системе происходит обмен цифровой информацией. Чтобы обеспечить совместимость с этой системой, должны быть приняты меры по правильному разбиению данных на рамки.
Если подвижное устройство находится в переключательном режиме, сообщаясь с несколькими ячейными узлами, или в режиме различения ячеек, цифровой переключатель 302 маршрутизирует вызовы на подходящие ячейные узлы для передачи подходящим ячейным передатчиком на адресуемое подвижное устройство-получатель. Однако, если подвижное устройство сообщается лишь с одним ячейным узлом или не находится в режиме различения ячеек, то сигнал направляется только на один ячейный узел.
Системный управляющий процессор 300 выполняет управление цифровыми переключателями 302 и 306 для маршрутизации данных на и от мобильной телефонной станции. Системный управляющий процессор 300 также занимается выделением соединений ячейным узлам и вокодерам на мобильной телефонной станции. Более того, системный управляющий процессор 300 обменивается сообщениями с управляющим процессором каждого ячейного узла, касающимися распределения конкретных вызовов (соединений) между мобильной телефонной станцией и ячейным узлом, а также выделением псевдошумовых кодов для вызовов. Должно быть понятно, что функцию, которую выполняют цифровые переключатели 302 и 306, изображенные на фиг. 8, может выполнять физически одиночное переключательное устройство.
Когда действует режим различения ячеек, подвижное устройство должно использовать поисковый приемник для идентификации и приема наисильнейшего многопутного сигнала от каждой из двух ячеек. Приемники цифровых сигналов должны работать под управлением поискового приемника и управляющего процессора, чтобы демодулировать сильнейшие сигналы. Когда число приемников меньше числа ячейных узлов, передающих информацию параллельно, можно воспользоваться способностью различительного переключения. Например, при наличии только одного приемника данных и двух передающих ячейных узлов поисковый приемник будет следить за контрольными сигналами обоих ячейных улов и выбирать наиболее сильный сигнал для приемника для демодулирования. В описываемом варианте осуществления выбор можно производить для каждой рамки или каждые 290 мсек.
Системный управляющий процессор ответственен за выделение приемников цифровых данных и модуляторов на ячейном узле для обработки конкретных соединений. Поэтому в линии ячейка - подвижное устройство системный управляющий процессор управляет выделением последовательностей Уолша, используемых ячейным узлом для передачи конкретного вызова на подвижное устройство. Дополнительно, системный управляющий процессор управляет последовательностями Уолша и псевдошумовыми кодами, используемыми приемником. В линии "подвижное устройство - ячейка" системный управляющий процессор также управляет пользовательскими псевдошумовыми кодами для соединения подвижного устройства. Информация о выделениях передается от мобильной телефонной станции на ячеистый узел и от ячейного узла на подвижное устройство. Системный управляющий процессор также наблюдает за ходом соединения, качеством сигналов и инициирует разъединение при потере сигнала.
В линии связи "подвижное устройство - ячеистый узел" канальные характеристики требуют изменения техники модулирования. В частности, нельзя использовать контрольную несущую так, как она используется в линии связи "ячеистый узел - подвижное устройство". Контрольная несущая должна быть более мощной, чем речевая несущая, чтобы обеспечивался хороший фазовый эталон для модулирования данных. Поскольку ячеистый узел одновременно передает много речевых несущих, все речевые несущие совместно пользуются одним контрольным сигналом. Поэтому (отношение) мощность контрольного сигнала на речевую несущую весьма мала.
Однако в линии связи "подвижное устройство - ячейный узел" только одна речевая несущая приходится на подвижное устройство. Если бы использовался контрольный сигнал, то он потребовал значительно больше мощности, чем речевая несущая. Такая ситуация нежелательна, поскольку общая системная пропускная способность значительно бы понизилась по причине интерференции, обусловленной наличием большего числа мощных контрольных сигналов. Следовательно, надлежит пользоваться модуляцией, допускающей эффективную демодуляцию без контрольного сигнала.
Поскольку канал "подвижное устройство - ячейный узел" подвержен федингу Релея, влекущему резкие изменения фазы канала, невыполнимы способы когерентной демодуляции, подобные реализуемому петлей Костаса (Costas), которая извлекает фазу из принимаемого сигнала. Можно пользоваться другими способами, подобными дифференциальному когерентному PSK, но они не обеспечивают желаемый уровень отношения сигнал/шум.
Поэтому следует использовать ортогональную сигнализацию, подобную двоичной, четвертичной или m-чной сигнализации. В описываемом варианте осуществления применен способ 64-ной ортогональной сигнализации, использующий функции Уолша. Демодулятор m-чной ортогональной сигнализации требует когерентность каналов только на протяжении передачи m-чного символа. В описываемом варианте осуществления такой временной отрезок равен длительности двух битов.
Процесс кодирования и модулирования сообщения начинает свертывающий кодер с ограничивающей длиной K = 9 и кодовой скоростью r = 1/3. При номинальной скорости передачи данных 9600 битов/сек кодер генерирует 28800 двоичных символов в секунду. Они группируются в знаки, содержащие по 6 символов каждый, со скоростью 4800 знаков в секунду, при этом общее число возможных знаков равно 64. Каждый знак кодируется последовательностью Уолша, состоящей из 64 двоичных битов или "чипов". В описываемом варианте осуществления передача 64-битовой последовательности Уолша выполняется со скоростью 307 200 чипов в секунду.
Затем чипы Уолша "покрываются" или, другими словами, умножаются на псевдошумовую последовательность, генерируемую со скоростью 1,2288 МГц. Каждому подвижному устройству выделяется уникальная псевдошумовая последовательность для этой цели. Псевдошумовая последовательность может либо выделяться на длительность соединения, либо выделяться для постоянного пользования подвижному устройству. Выделенная псевдошумовая последовательность далее в тексте именуется пользовательской псевдошумовой последовательностью. Генератор пользовательских псевдошумовых последовательностей работает с частотой 1,2288 Мгц и, следовательно, создает четыре псевдошумовых чипа для каждого чипа Уолша.
Наконец, генерируется пара коротких, длиной 32768, псевдошумовых последовательностей. В описываемом варианте осуществления используются такие же последовательности, что и для линии "ячейный узел - подвижное устройство". Покрытая пользовательской псевдошумовой последовательностью последовательность чипов Уолша затем покрывается, или умножается, каждой из двух коротких псевдошумовых последовательностей. Затем две результирующие последовательности двухфазно модулируют квадратурную пару синусоид и суммируются для образования одного сигнала. Затем результирующий сигнал фильтруется на полосе, переносится в конечную радиочастотную полосу, усиливается, фильтруется и излучается антенной на подвижное устройство. Как было сказано выше относительно сигнала в линии "ячейный узел - подвижное устройство", порядок выполнения фильтрования, усиления, переноса в другую полосу и модулирования можно изменять.
В альтернативном варианте осуществления можно создавать и использовать две различные фазы пользовательского псевдослучайного кода для модулирования двух несущих фаз квадрофазной формы волны, чтобы избавиться от необходимости использовать последовательности длиной 32768. В другом альтернативном варианте линии связи "подвижное устройство - ячейный узел" может использовать только двухфазную модуляцию, также не применяя короткие последовательности.
Приемник ячейного узла для каждого сигнала генерирует короткие псевдошумовые последовательности и последовательские псевдошумовые последовательности для каждого принятого сигнала, переданного активным подвижным устройством. Приемник коррелирует энергию принятого сигнала с каждой из закодированных сигнальных форм в отдельных корреляторах. Выходной сигнал каждого из корреляторов затем отдельно обрабатывается для декодирования 64-чного кодирования и кодирования свертывания с использованием процессора "Быстрое преобразование Хадамарда" и реализующего алгоритм Витерби.
В другом альтернативном варианте модулирующей схемы для линии "подвижное устройство - ячейный узел" та же самая модулирующая схема может быть использована для линии "ячейный узел - подвижное устройство". При этом подвижное устройство использует пару секторных кодов длиной 32768 чипов как внешние коды. Внутренний код будет использовать последовательность Уолша 64 битов, которая выделена подвижному устройству для использования, пока оно находится в этом секторе. Фактически одна и та же последовательность Уолша может быть выделена для линии "подвижное устройство - ячейный узел", как и для линии "ячейный узел - подвижное устройство".
Указанная выше схема ортогонального псевдошумового кодирования ограничивает расширение наличной полосы частот, которая может быть использована модулирующей системой, до частного от деления максимальной скорости передачи чипов на 64, т.е. 19200 Гц при числовых данных, принятых для описываемого варианта осуществления. Это исключит использование m-чного кодирования при больших m так, как это описано применительно настоящему варианту осуществления. Альтернативно, однако можно использовать скорость передачи r = 1/1 и ограничительную длину K = 9 при кодировании свертыванием совместно с дифференциальной двоичной фазово-замещающей ключевой модуляцией закодированных двоичных символов. Демодулятор ячейного узла мог бы формировать фазовый эталон на коротком временном интервале, реализуя способ, изложенный в работе Андрея Дж. Витерби и Аудрея М. Витерби "Нелинейная оценка модулированной ключевым смещением фазы несущей применительно к пачковым цифровым передачам", Труды IEEE по теории информации, том IT-29, N 4, июль 1983. Например, фазовый эталон может быть усредняем лишь по 4 символам, требуя не большей когерентности, чем описанная выше 64-чная схема.
Однако вышеописанная альтернативная схема будет работать хуже предпочтительного варианта в условиях сильного фединга Релея и многопутья. Но в окружающей среде, где в меньшей степени проявляются фединг и многопутье, как, например, в канале "спутник - подвижное устройство" и в определенных каналах наземного подвижного устройства, альтернативная система способна работать лучше, чем предпочтительный вариант осуществления. Это может случаться, поскольку выгоды от придания взаимной ортогональности сигналам подвижного устройства могут перевесить потери в эффективности распознавания дифференциальной сдвигающей фазу ключевой схемы.
Чтобы удовлетворить требование временной совместимости ортогональных функций Уолша для линии связи "подвижное устройство - ячейный узел", каждый ячейный приемник определяет временное отклонение от номинального тактирования каждого принятого сигнала. Если некоторый принятый сигнал тактируется с запозданием, то ассоциированные ячейный модулятор и передатчики передают на это подвижное устройство команду сместить вперед тактирование передачи на некоторый шаг. Наоборот, если тактирование принимаемого сигнала подвижного устройства опережает номинальное тактирование, то на подвижное устройство подается команда задержки на некоторый шаг. Шаги регулирования тактирования составляют 1/8 псевдошумового чипа или 107,7 нс. Такие команды передаются на сравнительно низкой скорости, порядка 10-15 Гц, и каждая состоит из одного бита, вставляемого в поток цифровых речевых данных.
Во время операции мягкого переключения подвижное устройство принимает сигналы от двух или более ячейных узлов. Поскольку подвижное устройство способно синхронизировать свое тактирование только по командам регулировки тактирования от одного из ячейных узлов, то подвижное устройство будет сдвигать свое тактирование по командам, принимаемым от наиболее мощного принимаемого ячейного узла. Поэтому передаваемый подвижным устройством сигнал будет во времени совмещен с ячейкой, между которой и ним имеется наилучший путь. В противном случае возникает значительно большая взаимная интерференция с другими пользователями.
Если каждый ячейный приемник, принимающий сигнал подвижного устройства, будет выполнять описанные выше измерение временного отклонения и делать корректирующие передачи, то все принимаемые подвижными устройствами сигналы будут приниматься при приблизительно одинаковом тактировании, что повлечет снижение интерференции.
Фиг. 9 представляет в форме блок-схемы телефонную аппаратуру, кодово делящую множественный доступ подвижного устройства. Кододелящая множественный доступ телефонная аппаратура подвижного устройства включает в себя антенну 430, которая соединена диплексером 432 с аналоговым приемником 344 и усилителем мощности передачи 436. Антенна и диплексер 432 выполнены по известным схемам и позволяют одновременно вести передачу и прием через одиночную антенну. Антенна 430 собирает передаваемые сигналы и подает их через диплексер 432 на аналоговый приемник 434. Приемник 434 принимает радиочастотные сигналы от диплексера 432, которые обычно заключены в частотной полосе 850 МГц, для усиления и переноса в полосу промежуточных частот. Этот процесс переноса осуществляется с помощью частотного синтезатора известной конструкции, который позволяет настраивать приемник на любую из частот внутри принимаемой частотной полосы общей полосы частот ячеистой телефонной сети. Сигналы также фильтруются и отцифровываются перед подачей на приемники цифровых данных 540 и 542 и поисковый приемник 544.
Фиг. 10 представляет более детально приемник 434. Принятые сигналы от антенны 430 поступают на понижающий преобразователь 500, который состоит из радиочастотного усилителя 502 и смесителя 504. Принятые сигналы поступают на вход радиочастотного усилителя 502, где они усиливаются и откуда они подаются на вход смесителя 504. Смеситель 504 имеет другой вход, на который поступает выходной сигнал частотного синтезатора 506. Усиленные радиочастотные сигналы переносятся смесителем на промежуточную частоту путем смешения с выходным сигналом частотного синтезатора.
Промежуточной частоты сигналы с выхода смесителя 504 поступают на полосовой фильтр 508, которым обычно является фильтр "Поверхностных акустических волн" с полосой пропускания около 1,25 МГц, где они фильтруются по полосе. Характеристики фильтра "поверхностных акустических волн" выбраны так, чтобы они согласовались с формой сигнала, передаваемого ячейным узлом. Сигнал, передаваемый ячейным узлом, представляет собой прямой последовательный расширенный спектрально сигнал, который модулируется псевдошумовой последовательностью, тактируемой с предопределенной частотой, которая в описываемом варианте принята равной 1,2288 Мгц. Именно эта тактовая частота выбрана для того, чтобы она была целым кратным скорости передачи данных 9,6 кб/с в базовой полосе.
Отфильтрованные сигналы с выхода фильтра полосы 508 поступают на вход промежуточной частоты усилителя переменного коэффициента усиления 510, который усиливает эти сигналы. Усиленные сигналы промежуточной частоты с выхода усиления промежуточной частоты 510 поступают на аналогово-цифровой преобразователь 512, где они преобразуются к цифровой форме. В описываемом варианте осуществления преобразование сигнала промежуточной частоты в цифровой сигнал выполняется с тактовой частотой 9,8304 МГц, которая точно в восемь раз превышает частоту псевдошумовых чипов. Хотя аналогово-цифровой преобразователь 512 изображен в виде части приемника 534, его можно вместо этого сделать частью приемников данных или поискового приемника. Отцифрованные промежуточной частоты сигналы с выхода преобразователя 512 поступают на приемники данных 440 и 442, а также поисковый приемник 444.
Приемник 434 также выполняет функцию управления мощностью для регулирования мощности передачи подвижного устройства. Автоматическая управляющая коэффициентов схема 514 также соединена с выходом усилителя промежуточной частоты 510. По уровню усиленного промежуточной частоты сигнала автоматическая управляющая коэффициентом усиления схема 514 подает сигнал обратной связи на управляющий коэффициентом усиления вход промежуточной частоты усилителя 510. Приемник 434 также использует автоматическую управляющую коэффициентом усиления схему 514 для генерирования аналогового управляющего мощностью сигнала, который передается на управляющую мощность передачи схему 438.
Как видно на фиг. 9, цифровой сигнал с выхода приемника 434 поступает на приемники цифровых данных 440 и 442 и поисковый приемник 444. Следует заметить, что недорогое малопроизводительное подвижное устройство может иметь лишь один приемник данных, в то время как более производительные подвижные устройства могут иметь два или более приемников, чтобы обеспечивался прием с различением.
Цифровой промежуточной частоты сигнал может содержать сигналы многих предстоящих соединений вместе с контрольными несущими, передаваемыми действующим в текущий момент ячейным узлом и всеми соседними ячейными узлами. Назначением приемников 440 и 442 является коррелирование дискрет промежуточной частоты с подходящей псевдошумовой последовательностью. Этот процесс коррелирования обладает свойством, которое известно специалистам как "усиление обработки", при котором повышается значение отношения сигнал/шум сигнала, соответствующего подходящей псевдошумовой последовательности, но не усиливаются другие сигналы. Скоррелированный выход затем синхронно детектируется с использованием контрольной несущей от ближайшего ячейного узла в качестве эталона фазы несущей. Результатом этого процесса детектирования является последовательность символов закодированных данных.
Полезное свойство псевдошумовой последовательности, используемое в настоящем изобретении, состоит в том, что она обеспечивает дискриминацию многопутных сигналов. Когда сигнал поступает на приемник подвижного устройства после прохождения по более чем одному пути, наблюдается различие в моментах приема этого сигнала. Это различие по времени приема соответствует разнице расстояний, деленной на скорость распространения. Если эта разница превышает одну секунду, то коррелирующий процесс выполнит дискриминацию между путями. Приемник может выбирать: отслеживать и принимать более короткий или более длинный путь. Если имеются два приемника, подобных приемникам 440 и 442, то можно отслеживать и обрабатывать два независимых пути параллельно.
Поисковый приемник 444 под управлением управляющего процессора 446 непрерывно сканирует временную область около номинального времени принимаемого контрольного сигнала ячейного узла для поиска других многопутных контрольных сигналов от этого же ячейного узла и других ячейных узлов, передающих контрольные сигналы. Приемник 444 измеряет силу любого сигнала заданной формы в моменты, отличные от номинального времени. Приемник 444 сравнивает по силе принимаемые сигналы. Приемник 444 подает сигнал о силе сигналов на управляющий процессор 446, указывая наиболее сильный сигнал.
Процессор 446 подает управляющие сигналы на приемники данных 440 и 442, чтобы каждый обрабатывал один из различных наиболее сильных сигналов. В некоторых случаях может оказаться, что контрольный сигнал, передаваемый другим ячейным узлом, сильнее сигнала ячейного узла, с которым в текущий момент поддерживается связь. Тогда управляющий процессор 446 генерирует управляющее сообщение для передачи на системный контроллер через несущую в текущий момент соединение ячейный узел, требующее перенос соединения на ячейный узел, соответствующий наиболее сильному контрольному сигналу. Поэтому приемники 440 и 442 могут обрабатывать вызовы (соединения) через два различных узла.
Во время операции мягкого переключения подвижное устройство будет принимать сигналы от двух или более ячеек. Поскольку подвижное устройство способно регулировать свое тактирование исключительно в ответ на регулирующие тактирование команды одного из ячейных узлов, то обычно подвижное устройство сдвигает во времени тактирование по командам, принимаемым от наиболее хорошо принимаемого ячейного узла. Поэтому передаваемый подвижным устройством сигнал оказывается совпадающим во времени с ячейным узлом, который создает наилучший путь. В противном случае будет усиливаться взаимная интерференция с другими пользователями.
Дополнительные детали описываемого примерного приемника, подобного приемнику данных 440, представлены на фиг. 10. Приемник данных 440 включает в себя псевдошумовые генераторы 516 и 518, которые генерируют PNI и PNQ последовательности точно так и соответствующими тем, какие генерирует ячейный узел. Тактирующие и последовательные управляющие сигналы поступают на псевдослучайные генераторы 516 и 518 от управляющего процессора 446. Приемник данных 440 также имеет генератор Уолша 520, который создает подходящую функцию Уолша для сообщения этого подвижного устройства с ячейным узлом. Генератор Уолша 520 генерирует в ответ на тактирующие сигналы (не изображены) и выбирающий функцию сигнал от управляющего процессора сигнал, соответствующий выделенной последовательности Уолша. Выбирающий функцию сигнал передает на подвижное устройство ячейным узлом в качестве устанавливающего соединение сообщения. PNI и PNQ последовательности с выходов псевдошумовых генераторов 516 и 518 поступают соответственно на входы вентилей исключающее ИЛИ 522 и 524. Генератор Уолша 520 подает свой выходной сигнал на два вентиля исключающее ИЛИ 522 и 524, где эти сигналы объединяются операцией исключающее ИЛИ и откуда они подаются как выходные последовательности PN'I и PN'Q.
Последовательности PN'I и PN'Q поступают на приемник 440, в котором они попадают на вход псевдошумового квадратурного сдвигающего фазу ключевого коррелятора 526. Псевдошумовой коррелятор 526 может быть сконструирован по подобию псевдошумовому коррелятору цифровых приемников ячейного узла. Псевдошумовой коррелятор 526 коррелирует принятые синфазные (I) и квадратурные (Q) канальные данные с последовательностями PN'I и PN'Q последовательностями и выдает скоррелированные 1 и 0 канальные выходные данные на соответствующие накопители 528 и 530. Накопители 528 и 530 накапливают входную информацию на периоде одного символа или 64 чипов. Выходные сигналы накопителей поступают на фазовый вращатель 532, который также принимает контрольный фазовый сигнал от управляющего процессора 446. Фаза принимаемых символьных данных вращается в соответствии с фазой контрольного сигнала, как это задает поисковый приемник и управляющий процессор. Выходным сигналом фазовращателя 532 являются синфазные канальные данные, которые поступают на обратно перемежевывающую и декодирующую схему.
Управляющий процессор 446 также имеет псевдошумовой генератор 534, который генерирует пользовательскую псевдошумовую последовательность в ответ на входной адрес подвижного устройства или идентификатор пользователя. Псевдошумовая последовательность с выхода псевдошумового генератора 534 поступает на комбинирующую и декодирующую различия схему. Поскольку сигнал по линии "ячейный узел - подвижное устройство" зашифрован смешением с псевдошумовой последовательностью адреса пользователя подвижного устройства, то выходной сигнал псевдошумового генератора 534 используется для дешифрования передаваемого ячейным узлом сигнала, адресуемого пользователю подвижного устройства, аналогично тому, как это делается в приемнике ячейного узла. В частности, псевдошумовой генератор 534 генерирует выходную псевдослучайную последовательность для обратно перемежевывающей и декодирующей схемы, где она используется для расшифрования зашифрованных пользовательских данных. Хотя шифрование в описываемом варианте осуществления выполняется с использованием псевдошумовой последовательности, должно быть ясно, что можно использовать другие способы шифрования, известные специалистам в данной области техники.
Таким образом, выходные сигналы приемников 440 и 442 подаются на комбинирующую и декодирующую различия схему 448. Комбинирующая различия схема, встроенная в схему 448, просто совмещает тактирование двух потоков принимаемых сигналов и складывает их друг с другом. Этот процесс сложения можно предварить умножением этих двух потоков на некоторое число, соответствующее относительной силе сигнала для каждого из этих двух потоков. Можно полагать, что эту операцию реализует комбинатор различий максимальных отношений. Результирующий комбинированный сигнальный поток затем декодируется с использованием декодера, исправляющего ошибки и который включен в схему 448. Обычным цифровым базовой полосы оборудованием является цифровая вокодерная система. Кодоразделяющая множественный доступ система спроектирована так, что допускает включение разнообразных по конструкции вокодеров.
Базовой полосы схема 450 обычно включает в себя цифровой вокодер (не изображен), который может обладать переменной скоростью передачи данных, как это описано в ранее названном одновременно поданной заявке. Базовой полосы оборудование 450 дополнительно служит в качестве интерфейса для телефонного аппарата или другого периферийного устройства. Базовой полосы оборудование 450 позволяет использовать вокодеры различных схем. Базовой полосы схема 450 подает выходные информационные сигналы пользователю в соответствии с информацией, поступающей на нее от схемы 448.
В линии "подвижное устройство - ячейный узел" аналоговые речевые сигналы пользователя обычно передаются через телефонный аппарат на вход базовой полосы схемы 450. Базовой полосы схема 450 включает в себя аналогово-цифровой преобразователь (не изображен), который преобразует аналоговый сигнал к цифровой форме. Цифровой сигнал поступает на цифровой вокодер, где кодируется. Выходной сигнал вокодера подается на кодирующую с заблаговременным исправлением ошибок схему (не изображена) для исправления ошибок. В описываемом варианте осуществления исправляющее ошибки кодирование реализуется кодирующей свертыванием схемой. Отцифрованный закодированный сигнал с выхода базовой полосы схемы 450 поступает на модулятор 452.
Передаточный модулятор 452 сначала кодирует функцией Уолша передаваемые данные и затем модулирует закодированным сигналом базовой полосы пользовательской схемы на кодер 600, где, согласно допущению о примерном варианте осуществления, выполняется кодирование свертыванием. Выходной сигнал кодера 600 поступает на перемежевыватель 602, который в описываемом варианте осуществления является блочным перемежевывателем. Перемежеванные символы выдаются блочным перемежевывателем 602 на кодер Уолша 604 передаточного модулятора 452. Кодер Уолша 604 использует входные символы для генерирования кодового последовательного выхода. Последовательность Уолша поступает на один вход вентиля исключающее ИЛИ 606.
Передаточный модулятор 452 дополнительно содержит псевдошумовой генератор 608, который принимает адрес подвижного устройства как входной сигнал для определения выходной псевдошумовой последовательности. Псевдошумовой генератор 608 генерирует пользовательскую уникальную 42-битовую последовательность, как это было разъяснено со ссылками на фигуры 3 и 4. Дополнительным атрибутом псевдошумового генератора 608, который является общим для всех пользовательских псевдошумовых генераторов и который выше не упоминался, состоит в использовании техники маскирования при генерировании выходной пользовательской псевдошумовой последовательности. Например, 42-битовая маска обеспечивается для пользователя, причем каждый бит 42-битовой маски объединен операцией исключающее ИЛИ с битовым выходом каждого регистра в серии сдвигового регистра, который образует псевдошумовой генератор. Результаты операции объединения исключающим ИЛИ маски и битов сдвигового регистра затем объединяются операцией исключающее ИЛИ для формирования выходного сигнала псевдошумового генератора, который используется в качестве пользовательской псевдошумовой последовательности. Выходная псевдошумовая последовательность псевдошумовой несущий сигнал, для которого псевдошумовая последовательность выбирается в соответствии с адресной функцией, выделенной для этого (вызова) соединения. Псевдошумовая последовательность определяется управляющим процессором 44 по устанавливающей соединение информации, которая передается ячейным узлом и декодируется приемниками 440 и 442 и управляющим процессором 446. Альтернативно, управляющий процессор 446 может определять псевдошумовую последовательность по предварительному согласованию с ячейным узлом. Управляющий процессор 446 подает информацию о псевдошумовой последовательности на передаточный модулятор 452 и на приемники 440 и 442 для декодирования вызова (соединения).
Выходной сигнал передаточного модулятора 452 поступает на управляющую мощностью передачи схему 438. Мощность передачи сигнала управляется аналоговым управляющим мощностью сигналом, поступающим от приемника 434. Управляющие биты, передаваемые ячейными узлами в форме регулирующей мощность команды, обрабатываются приемниками данных 440 и 442. Регулирующая мощность команда используется управляющим процессором 446 для установки уровня мощности передачи подвижного устройства. По этой команде управляющий процессор 446 генерирует цифровой управляющий мощностью сигнал, который идет на схему 438. Дополнительную информацию о взаимодействии приемников 440 и 442, управляющего процессора 446 и управляющей мощностью передачи схемы 438 при управлении мощностью можно найти в названной выше одновременно поданной заявке.
Управляющая мощностью передачи схема 438 подает задающий мощность модулированный сигнал на усиливающую мощность передачи схему 436. Схема 436 усиливает и переносит промежуточной частоты сигнал на радиочастоту путем смешивания его с выходным сигналом частотного синтезатора, который настраивает этот сигнал на нужную выходную частоту. Схема 436 имеет усилитель, который усиливает мощность до окончательного выходного уровня. Сигнал адресуемой передачи с выхода схемы 436 поступает на диплексер 432. Диплексор 432 передает сигнал на антенну 340 для передачи на ячейные узлы.
Управляющий процессор также способен генерировать управляющие сообщения, подобные запросам режима различения ячейных узлов и командам прекращения связи с ячейным узлом. Эти команды поступают на передаточный модулятор 452 для передачи. Управляющий процессор 446 реагирует на данные, поступающие от приемников данных 440 и 442 и поисковый приемник 444 при вынесении решений, касающихся переключений и комбинирования различий.
Что касается передачи подвижного устройства, то аналоговый речевой сигнал пользователя подвижного устройства сначала проходит через цифровой вокодер. Выходной сигнал вокодера затем последовательно кодируется свертыванием с заблаговременным исправлением ошибок, кодируется 64-чными ортогональными последовательностями и используется для модулирования псевдослучайного несущего сигнала. 64-чная ортогональная последовательность генерируется кодером функции Уолша. Этот кодер управляется собиранием шести последовательных двоичных символьных выходов свертывающего с заблаговременным исправлением ошибок кодера. Шесть двоичных выходных сигналов совместно указывают, какая из 64 возможных последовательностей Уолша подлежит передаче. Каждая из последовательностей Уолша имеет длину в 64 бита. Поэтому скорость передачи чипов Уолша должна равняться 9600•3• (1/6)•64 = 307200 Гц при скорости передачи данных 9600 б/с.
В линии "подвижное устройство - ячейный узел" общая коротная псевдошумовая последовательность применяется для всех речевых несущих системы, в то время как кодирование адреса пользователя выполняется с помощью генератора пользовательских псевдослучайных последовательностей. Пользовательская псевдошумовая последовательность однозначно выделяется подвижному устройству по крайней мере на длительность соединения. Пользовательская псевдошумовая последовательность объединяется операцией исключающее ИЛИ с общими псевдошумовыми последовательностями, которые являются увеличенной длины 32768 последовательностями максимальной длины линейного сдвигового регистра. Затем каждый результирующий двоичный сигнал двухфазно модулирует квадратурную несущую, суммируется для образования сложного сигнала, фильтруются по полосе и преобразуются в выходные сигналы промежуточной частоты. В описываемом варианте осуществления некоторую часть фильтрационной обработки фактически выполняет цифровой фильтр с конечной импульсной характеристикой, работающий с двоичным последовательным выходом.
Затем выход модулятора регулируется по мощности сигналами от цифрового управляющего процессора и аналогового приемника, преобразуется в радиочастотный путем смешивания с выходным сигналом частотного синтезатора, который настраивает этот сигнал на заданную выходную частоту, и затем усиливается до окончательного выходного уровня. Передаваемый сигнал затем проходит на диплексер и антенну.
Фиг. 11 иллюстрирует предпочтительный, но все-таки примерный вариант осуществления передаточного модулятора подвижного устройства 452. Данные поступают в цифровой форме от цифровой псевдошумового генератора 608, т.е. последовательность PNU, поступает на вход исключающее ИЛИ 606. Символьные данные Уолша и PNV последовательность объединяются операцией исключающее ИЛИ, выполняемой вентилем 606, и поступают на входы двух вентилей исключающее ИЛИ 610 и 612.
Передаточный модулятор 452 дополнительно содержит псевдослучайные генераторы 614 и 616, которые соответственно генерируют PN1 и PNQ последовательности. Все подвижные устройства используют одни и те же PN1 и PNQ последовательности. В описываемом варианте осуществления эти псевдошумовые последовательности характеризуются нулевым сдвигом при использовании для связи по линии "ячейный узел - подвижное устройство". На другой вход каждого из вентилей исключающее ИЛИ 610 и 612 поступает соответственно PN1 и PNQ последовательности от генераторов псевдошумов 614 и 616. Последовательности PN1 и PNU объединяются операцией исключающее ИЛИ с выходным сигналом управляющей мощностью передачи 438 (смотрите фиг. 9).
В описываемом варианте осуществления линия связи "подвижное устройство - ячейный узел" используется код свертывания со скоростью r = 1/3 и ограничивающей длиной K = 9. Генераторами кода являются G = 557 (восьмеричное), G = 663 (восьмеричное) и G = 711 (восьмеричное). Аналогично с линией "ячейный узел - подвижное устройство", применяется повторение для работы на четырех различных скоростях передачи данных, которые создает вокодер рамками по 20 мсек. В противоположность линии "ячейный узел - подвижное устройство" повторяемые кодовые символы не передаются по воздуху при низких энергетических уровнях, а передается только один кодовый символ из повторяющейся группы на номинальном уровне мощности. В заключении, кодовое повторение в описываемом варианте осуществления используется как средство подгонки схемы с переменной скоростью передачи данных к перемежающей и модулирующей конструкции, как это будет показано в последующих параграфах.
Блочный перемежатель, перекрывающий 20 мсек, т.е. точно одну рамку вокодера, применяется в линии связи "подвижное устройство - ячейный узел". Число кодовых символов на интервале 20 мсек, предполагая скорость передачи данных 9600 б/с и кодовая скорость r = 1/3, равно 576. Параметры H и B, где H есть число строк и B число столбцов в матрице перемежателя, равны соответственно 32 и 18. Кодовые символы записываются в матрицу памяти перемежателя построчно, а считываются по столбцам.
Формат модулирования представляет собой 64-чное ортогональное сигнализирование. Другими словами, перемежанные кодовые символы группируются в группы по шесть для выбора одной из 64 ортогональных форм. 64 временные ортогональные формы являются теми самыми функциями Уолша, которые используются в качестве покрывающих последовательностей в линии связи "ячейный узел - подвижное устройство".
Временной интервал модулирования данных равен 208,33 мкс и называется интервалом символов Уолша. При скорости 9600 б/с интервал 208,33 мкс соответствует 2 информационным битам и эквивалентен 6 кодовым символам при скорости передачи кодовых символов 28800 символов/сек. Интервал символов Уолша разбивается на 64 равной длины временных интервала, каждый из которых называется чипом Уолша и равен 208,33/64 = 3,25 мкс. Поэтому скорость передачи чипов Уолша равна 1/3,25 мкс = 307,2 кГц. Поскольку скорость псевдошумового расширения симметрична в этих двух линиях связи, т.е. равна 1,2288 МГц, то на 4 псевдошумовых чипа приходится точно один чип Уолша.
Всего три псевдошумовых генератора используются на пути связи "подвижное устройство - ячейный узел", которыми являются генератор 42-битовых уникальных пользовательских псевдошумовых последовательностей и пара 15-битовых псевдошумовых генераторов синфазного и квадратурного каналов. После выполнения операции расширения уникальной пользовательской последовательности сигнал расширяется квадратурно ключевым фазовым сдвигом, как это делается в линии "ячейный узел - подвижное устройство". В противоположность линии "ячейный узел - подвижное устройство", в которой каждый сектор или ячейка идентифицирована одной из уникальных последовательностей длиной 215, здесь все подвижные устройства используют одни и те же I и Q последовательности. Эти псевдослучайные последовательности являются последовательностями нулевого сдвига, используемыми в линии "ячейный узел - подвижное устройство" и также именуемыми контрольными последовательностями.
Кодовое повторение и энергетическое масштабирование применяются в линии "ячейный узел - подвижное устройство", чтобы можно было допустить работу вокодера на переменных скоростях. Линия "подвижное устройство - ячейный узел" использует отличную схему, базирующуюся на пакетной передаче.
Вокодер работает на четырех различных скоростях передачи данных: 9600, 4800, 2400 и 1200 б/с, рамками по 20 мсек, как и в линии "ячейный узел - подвижное устройство". Информационные биты кодируются свертывающим кодером со скоростью r = 1/3 при повторе кодовых символов, 2, 4 и 8 раз на трех более низких скоростях передачи данных. Поэтому скорость передачи кодовых символов удерживается постоянной на 28800 символов/сек. После кодера кодовые символы перемежевываются блочным перемежателем, который перекрывает точно одну вокодерную рамку или 20 мсек. Всего 576 кодовых символов генерирует каждые 20 мсек свертывающий кодер, некоторые из которых являются повторными символами.
На фиг. 12 изображена последовательность кодовых символов, как она передается. Обратите внимание, что вокодерная рамка 20 мсек разбита на 16 вырезов, каждый длиной 1,25 мсек. Числовые характеристики линии "подвижное устройство - ячейный узел" таковы, что каждый вырез вмещает 36 кодовых символов при скорости передачи 28800 символов/сек или, что эквивалентно, 6 символов Уолша при скорости 4800 символов/сек. При скорости r = 1/2, т.е. 4800 б/с, вырезы объединяются в 4 группы, каждая из которых насчитывает 4 выреза, и, наконец, при скорости r = 1/8, т.е. 1200 б/с, вырезы объединяются в две группы, по восемь вырезов в каждой.
Фиг. 12 дает пример другого типа передачи символов пачками. Например, при скорости 1/4, т. е. 2400 б/с за время четвертого выреза первой группы четвертая и восьмая строки матрицы памяти перемежателя считываются по столбцам и последовательно передаются. Позиция вырезов для передаваемых данных должна рандомизироваться, чтобы снизить интерференцию.
Тактирование линии "подвижное устройство - ячейный узел" иллюстрирует фиг.
13. Фиг. 13 представляет собой развернутую диаграмму, представленную фиг. 7, которая включает в себя каналы "подвижное устройство - ячейный узел", т. е. речевой и доступа. Синхронизация линии
"подвижное устройство - ячейный узел" предполагает выполнение следующих шагов:
1. Успешное декодирование синхронизирующего сообщения, т.е. проверка по коду циклической избыточности;
2. Загрузка длинного псевдошумового сдвигового регистра состоянием, принимаемым от сектора, который использует сдвинутый контрольный сигнал;
3. Компенсация фазового сдвига контрольного кода,
если прием ведется от сектора, который использует сдвинутый контрольный сигнал.
После из выполнения подвижное устройство оказывается полностью синхронизированным, т. е. установятся псевдошумовой синхронизм и синхронность с реальным временем, и оно может начать передачу либо канала доступа, либо речевого канала.
Подвижное устройство, чтобы инициировать вызов (соединение) должно быть обеспечено сигнализирующими средствами, которые выполняют соединение с другим системным пользователем через ячейный узел. В линии "подвижное устройство - ячейный узел" перспективным способом доступа является вырезанная AlOHA. Пакет канала доступа состоит из преамбулы и последующей информации.
Длина преамбулы в описываемом варианте осуществления является кратным 20 мсек рамки и является параметром сектора/ячейки, который подвижное устройство принимает в одном из сообщений страничного канала. Поскольку приемники используют преамбулы для разрешения задержек распространения, эта схема позволяет изменять длину преамбул в зависимости от радиуса ячейки. Пользовательский псевдошумовой код для канала доступа либо заранее запрограммирован, либо передается на подвижные устройства по страничному каналу.
Модуляция фиксирована и постоянна на протяжении преамбулы. Ортогональной формой, применяемой в преамбуле, является W0, т.е. полностью нулевая функция Уолша. Обратите внимание, что нулевая последовательность на входе свертывающего генератора порождает желаемую форму W0.
Пакет данных канала доступа может состоять из одной или самое большее двух 20 мсек рамок. Кодирование, перемежание и модулирование канала доступа выполняется точно так, как для речевого канала при скорости 9600 б/сек. В описываемом варианте осуществления сектор/ячейка требует от подвижных устройств передачи 40 мсек. преамбулы, и сообщение канала доступа требует одну рамку данных. Допустим, что Np есть число преамбульных рамок, где k есть число интервалов по 20 мсек, истекших от предопределенного начала отсчета времени. Тогда подвижным устройствам разрешается инициировать передачу по каналу доступа лишь в том случае, если удовлетворяется уравнение: (k, Np+2) = 0.
Применительно к другим коммуникационным приложениям может оказаться желательным изменить порядок различных элементов кодирования с исправлением ошибок, кодирования ортогональными последовательностями и псевдошумового кодирования, чтобы лучше удовлетворить конкретному приложению.
Например, при спутниковых коммуникациях, когда сигналы ретранслируются между большими наземными станциями и подвижными терминалами одним или более спутниками, может оказаться желательным использовать когерентную модуляцию и демодуляцию в обеих направлениях линии связи, поскольку этот канал в большей степени фазово когерентен, чем канал наземных подвижных устройств. В подобном приложении подвижной модулятор не будет использовать m-чное кодирование, как это описано выше. Вместо этого будет использоваться двухфазное или четырехфазное модулирование заблаговременно исправленных символов с известной когерент демодулированием с фазой несущей, извлекаемой из принимаемого сигнала с помощью способов, базирующихся на петле Костаса. Дополнительно, может быть использована, как она описана выше применительно к линии "ячейный узел - подвижное устройство", канализация ортогональными функциями Уолша. Пока фаза канала остается сравнительно когерентной, эта модулирующая и демодулирующая система обеспечивает работу с более низким отношением Eb/N0 (энергия/количество), чем при m-чном сигнализировании, обеспечивая большую пропускную способность системы.
В другом варианте осуществления может оказаться предпочтительным кодировать речевой сигнал непосредственно в сигнал радиочастоты, вместо использования вокодера и упреждающего исправления ошибок. Хотя применение вокодера и способов упреждающего исправления ошибок обеспечивают высокую работоспособность линии связи, сложность ее реализации высока, что влечет дополнительные расходы и значительное потребление энергии. Эти недостатки особенно нежелательны для карманного телефона, применительно к которому расход батарейной энергии и стоимость имеют большое значение. В практике потребительских цифровых телефонных передач речевой сигнал представляется в цифровом формате в виде 8-битовых дискрет речи, получаемых при частоте дискретизации 8 кГц. Кодоразделяющая множественный доступ система способна кодировать 8-битовые дискреты непосредственно, представляя их фазовыми углами несущей. Это исключает необходимость в использовании вокодера или кодера/декодера с исправлением ошибок. Это также потребует несколько более высокое отношение сигнал/шум для обеспечения хорошего качества работы, что повлечет понижение пропускной способности. В другом альтернативном варианте 8-битовые дискреты речи можно непосредственно кодировать амплитудами несущей. В следующем варианте, дискреты речевого сигнала можно кодировать фазами и амплитудами несущей.
Предпочтительные варианты осуществления описаны для того, чтобы любой специалист в данной области мог реализовать или использовать настоящее изобретение. Для специалистов должны быть очевидны разнообразные модификации настоящих вариантов, и родовые принципы, изложенные выше, можно применить к другим вариантам без изобретательского творчества. Поэтому настоящее изобретение не ограничивается вариантами осуществления, описанными выше, но должно восприниматься в наиболее широком объеме, совместимом с принципами и признаками новизны, раскрытыми выше.
Реферат
Система и способ для обмена информационными сигналами, реализующие технику спектрального расширения сообщений. Конструируются псевдослучайные шумовые последовательности, которые обеспечивают ортогональность пользователей, благодаря чему уменьшается взаимная интерференция, повышается пропускная способность и улучшается качество линии связи. При ортогональности псевдослучайных шумовых кодов взаимная корреляция равна нулю на предопределенном временном интервале, что влечет отсутствие интерференции между ортогональными кодами при условии, что временные рамки кодов по времени совмещены друг с другом. В описанном варианте осуществления ячейный узел и подвижные устройства обмениваются сообщениями, используя прямые последовательные коммуникационные сигналы с расширенным спектром. В линии связи ячейка - подвижное устройство выделяются контрольный, синхронизирующий, страничный и речевой каналы. Информация, которая передается по каналам линии ячейка - подвижное устройство, вообще говоря, кодируется, перемежается, модулируется двухфазным ключевым сдвигом с ортогональным покрытием каждого модулированного двухфазным ключевым сдвигом символа и расширением ключевым квадратурно-фазовым сдвигом покрытых символов. В линии "подвижное устройство - ячейка" выделены канал доступа и речевой канал. Информация, передаваемая по каналам линии "подвижное устройство - ячейка", вообще говоря, кодируется, перемежается, ортогонально сигнализируется вместе с расширением ключевым квадратурно-фазовым сдвигом. 13 с. и 48 з.п.ф-лы, 13 ил.

Комментарии