Способ и устройство для передачи данных при несинхронизированных переходах между областями с разными тактовыми частотами - RU2639956C1
Код документа: RU2639956C1
Чертежи




Описание
При передаче данных между двумя устройствами или узлами, работающими с разной тактовой частотой, наряду с обеспечением передачи всех данных, важна также синхронизация обоих рабочих циклов.
Например, в первом узле данные могут производиться с первой тактовой частотой, затем второй узел считывает или запрашивает их со второй тактовой частотой, которая отличается от первой тактовой частоты. Так, например, в датчиках значения частичных приращений формируются с тактовой частотой информационного канала и сначала аккумулируются. Считывающий блок читает мгновенное состояние накопителя с тактовой частой опроса, так что в каждом тактовом периоде опроса на считывающий блок передается значение полного приращения датчика, сформированное за накопительный интервал.
Полное приращение образуется путем накапливания данных на протяжении целого числа тактов информационного канала. Однако, если тактовый период опроса не равен целочисленному кратному тактового периода информационного канала, то это целое число тактов информационного канала не будет постоянным. Количество тактов информационного канала изменяется между двумя целочисленными значениями N и N+1 таким образом, что его установившееся среднее значение, между N и N+1, соответствует отношению тактовой частоты информационного канала к тактовой частоте опроса. И даже если тактовый период опроса составляет целочисленное кратное тактового периода информационного канала, уже самые мелкие отклонения тактовых частот информационного канала или запроса могут приводить к эффектам периодичного изменения количества тактов информационного канала.
Все это позволяет соответствовать так называемому интегральному критерию погрешности, который показывает, насколько хорошо частичные приращения регистрируются в полных приращениях, так что после определенного количества циклов опроса оказываются переданными все частичные приращения, произведенные с тактовой частотой информационного канала.
Однако изменения в количестве частичных приращений, содержащихся в получаемом полном приращении, интерпретируются считывающим блоком как дополнительные помехи. Считанное полное приращение не соответствует полностью интегрированию данных по тактовому периоду опроса, вследствие чего требование соответствия так называемому дифференциальному критерию погрешности, который описывает это качество, выполняется лишь в недостаточной степени.
Поэтому задачей настоящего изобретения является предоставление такого способа, а также такого устройства для передачи данных при несинхронизированном переходе между двумя областями с разными тактовыми частотами, которые и соответствуют интегральному критерию погрешности и улучшают соответствие дифференциальному критерию погрешности.
Эта задача решена способом и устройством согласно независимым пунктам формулы изобретения. Предпочтительные варианты исполнения приведены в зависимых пунктах.
В дальнейшем варианты исполнения способа согласно изобретению и устройства согласно изобретению более детально разъясняются посредством чертежей, причем однотипные элементы снабжены одними и теми же обозначениями.
На фигуре 1А показано прохождение тактов работы информационного канала на временной оси, а также частичные приращения, аккумулируемые в накопителе.
На фигуре 1В показано прохождение циклов опроса на временной оси, а также полное приращение, считанное в каждом из соответствующих тактов опроса.
На фигуре 2 показан в виде примера способ согласно изобретению.
На фигуре 3 показан первый вариант осуществления операции для получения второго значения полного приращения, которая включает в себя либо экстраполяцию, либо интерполяцию полного приращения, запрошенного к настоящему моменту.
На фигуре 4 показан второй вариант осуществления операции для получения второго значения полного приращения, при которой появляется задержка на один такт опроса между запросом первого полного приращения и передачей полученного из него значения второго полного приращения.
На фигуре 5 показано в виде примера устройство согласно изобретению, а также первый узел и второй узел.
На фигуре 6 показан первый вариант исполнения устройства согласно изобретению, предназначенный для выполнения первого варианта осуществления способа согласно изобретению.
На фигуре 7 показан второй вариант исполнения устройства согласно изобретению, предназначенный для выполнения второго варианта осуществления способа согласно изобретению.
Фигуры 1А и 1В служат для иллюстрации проблемы, лежащей в основе данного изобретения. На фигуре 1А представлено прохождение во времени тактов работы информационного канала с первой частотой fa, а также состояние накопителя, относящееся к каждому такту информационного канала, то есть количество аккумулируемых в накопителе частичных приращений v1, в то время как на фигуре 1В представлено прохождение во времени циклов опроса со второй частотой fs, а также полное приращение v0, запрошенное или считанное в каждом соответствующем такте опроса. В качестве примера взята первая частота fa, равная 3,4 кГц, и вторая частота fs - 800 Гц. Следовательно, один такт опроса состоит из N=fa/fs=4,25 тактов информационного канала.
Поскольку накапливание возможно только на протяжении целого числа тактов информационного канала, для полной передачи всех данных они аккумулируются на протяжении трех раз по четыре такта информационного канала и одного раза, длящегося пять тактов информационного канала. То есть количество частичных приращений v1, которое содержится в полном приращении v0, варьируется между 4 и 5. Процесс повторяется периодически по этому образцу, в представленном случае период повторения этого образца составляет четыре такта опроса. При этом последовательность чередующихся значений 4 и 5 количества частичных приращений v1, содержащихся в полном приращении v0, выстраивают таким образом, что число переключений между обоими значениями становится максимальным.
Возможные виды погрешности, которые могут появляться при этом виде опроса данных и интегрирования, подразделяются на два класса: во-первых, интегральный критерий погрешности, который оценивает, насколько хорошо регистрируемые частичные приращения v1 отражаются в полных приращениях v0, и, во-вторых, дифференциальный критерий погрешности, который оценивает, насколько хорошо полное приращение v0 соответствует интегрированию по такту опроса.
В представленном примере требования по интегральному критерию погрешности удовлетворяются полностью, однако по дифференциальному критерию погрешности они выполнены только недостаточно, что интерпретируется в считывающем блоке как дополнительные помехи. Поэтому необходимо улучшить дифференциальный критерий погрешности с помощью способа согласно изобретению, в то же время оставляя без изменения выполнение требований интегрального критерия погрешности.
Для разъяснения способа согласно изобретению вводятся следующие символы:
ts - номинальное временное приращение, относящееся ко второй частоте fs;
t0(k) - временное приращение, относящееся к запрошенному в данный момент первому полному приращению;
t1(k) - временное приращение, относящееся к предыдущему первому полному приращению;
t1r(k) - оставшаяся часть временного приращения t1(k), относящегося к предыдущему первому полному приращению, еще не обработанная в предыдущей операции по получению второго полного приращения;
v0(k) - первое полное приращение, запрошенное в ходе выполняемой в настоящей момент операции по опросу первого полного приращения;
v1(k) - предыдущее первое полное приращение, запрошенное в ходе предыдущей операции по опросу первого полного приращения;
vr(k) - использованная в предыдущей операции по получению второго полного приращения экстраполируемая часть, которая должна учитываться в ходе выполняемой в настоящей момент операции по получению второго полного приращения в качестве корректирующей величины приращения;
v2(k) - "позапрошлое" первое полное приращение, запрошенное перед предыдущей операцией по опросу первого полного приращения;
t2(k) - временное приращение, относящееся к позапрошлому первому полному приращению;
t2r(k) - оставшаяся часть временного приращения t2(k), относящегося к позапрошлому первому полному приращению, еще не обработанная в предшествующих операциях по получению второго полного приращения;
v(k) - второе полное приращение, к которому относится соответствующее номинальное временное приращение ts.
Понятие "приращение" используется как синоним разности в информационном содержимом между конечным значением и начальным значением. Например, понятие "полное приращение" означает такую разность в информационном содержимом, для которой начальное значение информационного содержимого определяется в начале определенного интервала времени, а конечное значение информационного содержимого - в конце этого интервала времени. Соответствующий интервал времени обозначается как относящееся к этой разности временное приращение. Информационное содержимое может представлять собой, например, измеряемую величину.
На фигуре 2 показан в виде примера способ согласно изобретению в форме блок-схемы. После начала осуществления способа в первой операции S11 запрашивают от первого узла первое полное приращение v0(k), а также первое значение параметра W(k). В первом узле данные, называемые также частичными приращениями определенной величины, аккумулируются с первой частотой fa, которая обозначается также как частота информационного канала. Например, первый узел может представлять собой датчик, регистрирующий или выдающий результаты измерения с первой частотой fa и непрерывно аккумулирующий их в накопителе. Целочисленное количество аккумулированных частичных приращений образует первое полное приращение v0(k), причем первое полное приращение v0(k) соответствует информационному содержимому блока данных, имеющегося к настоящему моменту k опроса в первом узле - другими словами, совокупности данных аккумулированных частичных приращений. Накапливание данных позволяет компенсировать неравномерность данных или результатов измерения на протяжении накопительного интервала.
Помимо этого, первый узел производит первое значение параметра W(k), который характеризует временное приращение t0(k), относящееся к первому полному приращению vo(k). Это первое значение W(k) может представлять собой, например, показание счетчика накопителя, которое возвращает количество частичных приращений, содержащихся в первом полном приращении v0(k) и из которого путем умножения на тактовый период ta=1/fa информационного канала рассчитывается временное приращение t0(k), относящееся к первому полному приращению v0 (k). Однако первое значение W(k) может представлять собой также и само временное приращение t0(k), относящееся к первому полному приращению v0(k). Временное приращение t0(k) соответствует накопительному интервалу, причем накопительный интервал - это промежуток времени между моментом производства последнего частичного приращения, вошедшего в результат предыдущей операции опроса первого полного приращения, и моментом производства последнего частичного приращения, вошедшего в результат операции опроса первого полного приращения, выполняемой в настоящей момент. Таким образом, накопительный интервал всегда представляет собой целочисленное кратное тактового периода ta информационного канала.
После опроса первого полного приращения v0(k) содержание накопителя в первом блоке устанавливается на 0. Определяется также первое значение W(k) для определения в следующей операции опроса первого значения W(k+1). Например, возможна установка счетчика накопителя на ноль.
Во второй операции S12 способа согласно изобретению из первого полного приращения v0(k), используя первое значение W(k), получают второе полное приращение v(k), причем второе полное приращение соответствует информационному содержимому блока данных, к которому относится номинальное временное приращение ts. Номинальное временное приращение ts соответствует интервалу интегрирования, причем интервал интегрирования - это продолжительность периода между моментом выполнения предыдущей операции по опросу первого полного приращения и моментом выполнения той операции по опросу первого полного приращения, которая проводится в настоящей момент. Таким образом, номинальное временное приращение ts соответствует тактовому периоду ts=1/fs опроса, где fs - вторая частота, с которой второй блок опрашивает данные, аккумулируемые в первом блоке. Вторая частота fs, а вместе с ней и номинальное временное приращение ts, в общем случае задаются и принимаются за постоянную величину. Однако возможно также определение конкретного значения ts и использование его, в качестве моментального значения t, при расчете второго полного приращения.
В третьей операции S13 полученное второе полное приращение v(k) передают на второй узел. Второй узел может представлять собой, например, блок оценки результатов или обрабатывающий блок, который оценивает или обрабатывает данные, производимые или регистрируемые в первом блоке, и при этом опрашивает данные из первого блока со второй частотой fs.
Как представлено на фигуре 2, возможно многократное повторение выполнения операций по опросу первого полного приращения v0(k) и первого значения W(k), по получению второго полного приращения v(k), а также по передаче второго полного приращения v(k), со второй частотой fs, причем каждый раз соответствующий индекс k повышается на единицу.
Способ согласно изобретению при любом соотношении первой частоты fa и второй частоты fs (fa/fs>1) приводит к улучшению дифференциального критерия погрешности, причем независимо от этого интегральный критерий погрешности остается выполненным.
Это относится, в частности, также к случаю, когда первая частота fa равна целочисленному кратному второй частоты fs.
Способ согласно изобретению предоставляет указанные преимущества также в случае, если отношение fa/fs, первой частоты fa ко второй частоте fs, обычно постоянное, варьирует в течение ограниченного времени. Это может быть вызвано, например, фазовыми флуктуациями, то есть колебаниями, значений первой частоты fa или второй частоты fs.
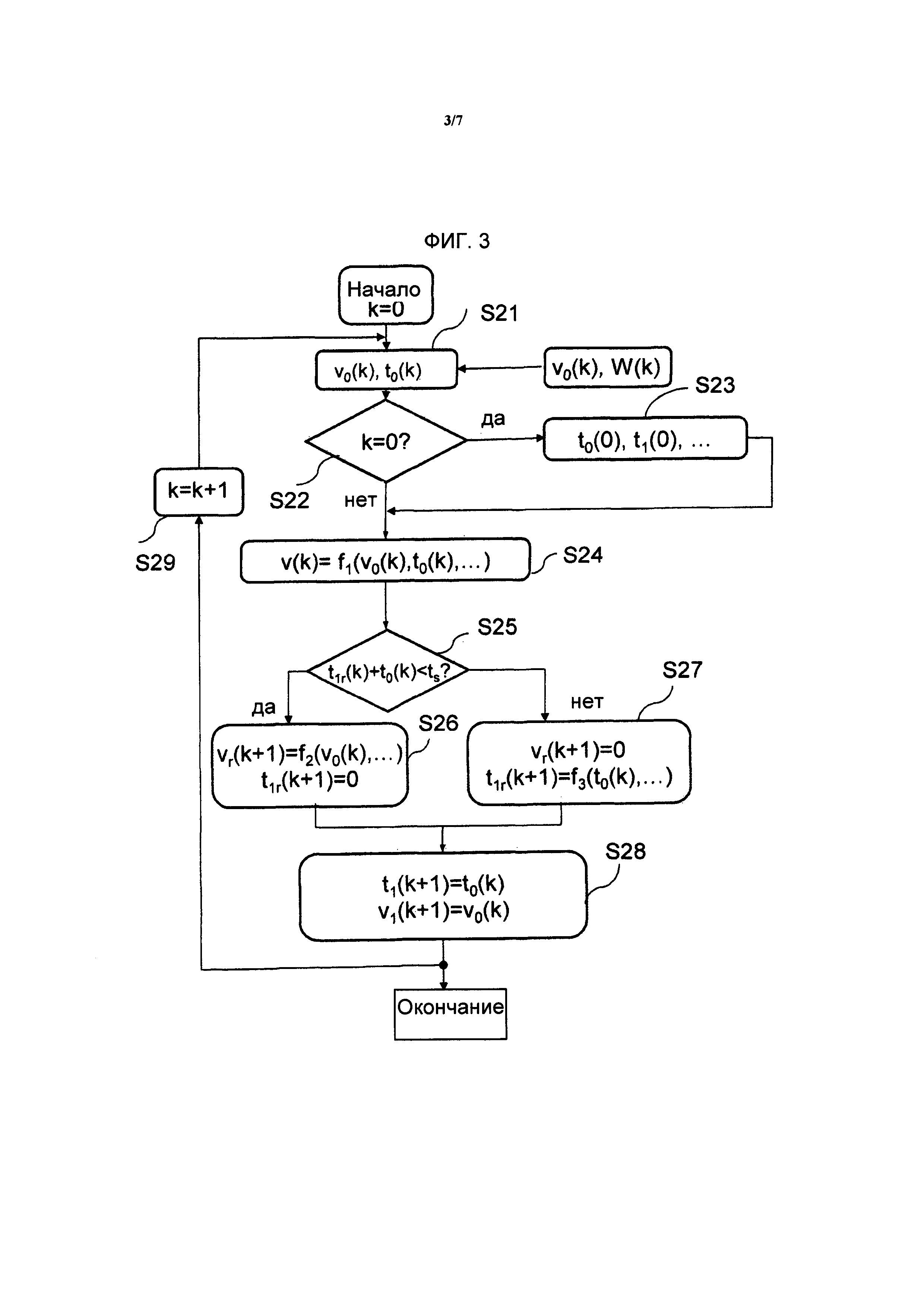
На фигуре 3 операция получения второго полного приращения согласно первому варианту исполнения способа представлена в виде блок-схемы процесса. После начала осуществления способа, при котором обнуляется индекс k, сначала в операции S21 запрашивают от первого узла первое полное приращение v0(k) и первое значение W(k), и, если первое значение W(k) не соответствует непосредственно временному приращению t0(k), относящемуся к первому полному приращению, то это временное приращение t0(k), относящееся к первому полному приращению v0(k), рассчитывают, исходя из значения W(k).
Затем в ходе операции S22 решают, равен ли индекс k нулю или нет. В случае если k=0, в операции S23 для получения второго полного приращения v(k) устанавливают следующие начальные значения:





В следующей операции S24 второе полное приращение рассчитывают, как указано ниже:

При этом первое слагаемое представляет возможную оставшуюся часть из предыдущего интервала интегрирования, еще не обработанную, второе слагаемое - самую большую часть актуального интервала интегрирования или всю его величину, а также возможное временно взятое значение, экстраполированное на еще неизвестный следующий интервал интегрирования, а последнее слагаемое, или соответственно вычитаемое - корректирующую величину приращения, которая учитывает временно взятое значение, экстраполированное на рассматриваемый интервал интегрирования, возможно, использованное в предыдущей операции по получению второго полного приращения. Таким образом, второе полное приращение соответствует сумме, состоящей из оставшейся части, еще не обработанной в предыдущей операции получения второго полного приращения, при наличии таковой части, из по меньшей мере части первого полного приращения, запрошенного в ходе выполняемой в настоящей момент операции опроса первого полного приращения, и доли актуального полного приращения, экстраполируемой в следующую операцию, при наличии таковой доли, и из корректирующей величины приращения, при ее наличии, которая соответствует величине, противоположной экстраполированной части, использованной в предыдущей операции получения второго полного приращения.
Чтобы разъяснять это подробнее, рассмотрим различные случаи, в зависимости от соотношения длительности номинального временного приращения ts и суммы, которая состоит из оставшейся части t1r (k) временного приращения, относящего к предыдущему первому полному приращению, еще не обработанной в предыдущей операции по получению второго полного приращения, и из временного приращения t0(k), относящегося к запрошенному на настоящем этапе первому полному приращению.
В случае если t1r(k)+t0(k)
Экстраполируемая часть второго полного приращения соответствует величине корректирующего приращения в следующей операции по получению второго полного приращения. Поскольку в расчете второго полного приращения v(k) участвует целиком все временное приращение t0(k), относящееся к рассматриваемому первому полному приращению, на следующую операцию по получению второго полного приращения не будет приходиться никакая еще не обработанная оставшаяся часть первого полного приращения, запрошенного на данном этапе.
В случае если t1r(k)+t0(k)≥ts, производится интерполяция первого полного приращения v0(k). С помощью этой интерполяции временное приращение t0(k), относящее к запрошенному на данном этапе первому полному приращению, укорачивается до окончания номинального временного приращения ts, так что в результате t1r(k)+t0'(k)=ts, где t0'(k) - укороченное временное приращение t0(k).
Поэтому на следующую операцию по получению второго полного приращения приходится еще не обработанная оставшаяся часть первого полного приращения, запрошенного на данном этапе. Поскольку не имеется экстраполируемой части второго полного приращения, при следующей операции по получению второго полного приращения не требуется вычитание корректирующей величины приращения.
Таким образом, для обоих представленных случаев различными являются, как описано, оставшаяся часть t1r(k), используемая в следующей операции по получению второго полного приращения, и корректирующая величина приращения vr(k), используемая в следующей операции по получению второго полного приращения. Поэтому после или перед расчетом второго полного приращения v(k) в ходе операции S25 производят разграничение случаев по длительности номинального временного приращения ts, как описано выше. В зависимости от этого в ходе операций S26 или S27 определяют, как указано ниже, переходные положения, то есть значения vr(k+1) и t1r(k+1), предназначенные для использования в следующей операции получения второго полного приращения:
для случая, когда t1r(k)+t0(k)

и

для случая, когда t1r(k)+t0(k)≥ts,

и

В ходе операции S28 определяют, одинаково для обоих случаев, оба следующих переходных положения, то есть значения t1(k+l) и v1(k+l), предназначенные для использования в следующей операции получения второго полного приращения, указанным ниже образом:


Далее, до тех пор, пока осуществление способа согласно изобретению не закончено, в операции S29 повышают индекс k на единицу, и операции S21-S29 повторяют, причем весь повторяемый процесс проводят со второй частотой fs, то есть один раз за каждый такт опроса.
Моделирование способа, представленного на фигуре 3, с применением фактических данных от датчика в качестве частичных приращений, в результате показало, что после вхождения в установившийся режим процесса второе полное приращение удовлетворяет требования по интегральному критерию погрешности даже в случае обременения частот fa и fs фазовыми флуктуациями, а дифференциальный критерий погрешности по отношению к первому полному приращению значительно улучшен. Отклонения второго полного приращения от ожидаемого значения, вызванные экстраполяцией при осуществлении способа, не превышали шума датчика.
На фигуре 4 представлена в виде блок-схемы процесса операция по получению второго полного приращения согласно второму варианту исполнения способа. После начала осуществления способа, при котором обнуляется индекс k, сначала в операции S31 запрашивают от первого узла первое полное приращение v0(k) и первое значение W(k) и, если первое значение W(k) не соответствует непосредственно временному приращению t0(k), относящемуся к первому полному приращению, рассчитывают временное приращение t0(k), относящиеся к первому полному приращению v0(k), исходя из значения W(k).
Затем в ходе операции S32 решают, равняется ли индекс нулю. В случае, если k=0, устанавливают в операции S33 для получения второго полного приращения v(k) следующие начальные значения:







В следующей операции S34 производят разграничение случаев по длительности номинального временного приращения ts в зависимости от суммы, которая состоит из оставшейся части t2r(k) временного приращения, относящего к предыдущему первому полному приращению, еще не обработанной в предыдущих операциях по получению второго полного приращения, и из оставшейся части t1r(k) временного приращения, относящего к предыдущему первому полному приращению, еще не обработанной в предыдущей операции по получению второго полного приращения.
В случае, если t2r(k)+t1r(k)

Таким образом, второе полное приращение складывается из оставшейся части позапрошлого первого полного приращения, возможно, еще не обработанной, то есть из позапрошлого интервала интегрирования, из всей еще не обработанной оставшейся части предыдущего первого полного приращения, то есть из предыдущего интервала интегрирования, а также из части актуального первого полного приращения из актуального интервала интегрирования. Поскольку вся оставшаяся часть предыдущего первого полного приращения учитывается во втором полном приращении, от предыдущего первого полного приращения не остается никакой части, подлежащей учету в следующей операции по получению второго полного приращения. Часть первого полного приращения, рассматриваемого в настоящего момент, уже участвует во втором полном приращении, так что в следующей операции получения второго полного приращения нужно учитывать только лишь остальную часть этого первого полного приращения. Таким образом, отсюда следуют для дальнейшей операции по получению второго полного приращения такие переходные положения, также рассчитываемые в операции S35:


В случае, если t2r(k)+t1r(k)≥ts, второе полное приращение рассчитывают в операции S36 следующим образом:

Таким образом, второе полное приращение складывается из оставшейся части позапрошлого первого полного приращения, возможно, еще не обработанной, то есть из позапрошлого интервала интегрирования, а также из большей части предыдущего первого полного приращения, то есть из предыдущего интервала интегрирования. Поскольку только часть предыдущего первого полного приращения уже учитывается во втором полном приращении, от предыдущего первого полного приращения остается еще часть, подлежащая учету в следующей операции по получению второго полного приращения. Во втором полном приращении пока не учитывается никакая часть от первого полного приращения, совершаемого в настоящий момент, так что в следующей операции получения второго полного приращения нужно учитывать это первое полное приращение целиком. Таким образом, отсюда следуют для дальнейшей операции по получению второго полного приращения такие переходные положения, также рассчитываемые в операции S36:


В общем виде можно говорить о том, что второе полное приращение соответствует сумме, состоящей из оставшейся части позапрошлого первого полного приращения, запрошенного в позапрошлой операции по опросу первого полного приращения, еще не обработанной в позапрошлой операции получения второго полного приращения, при наличии таковой части, из по меньшей мере части первого полного приращения, запрошенного в ходе предыдущей операции опроса первого полного приращения, а также из части первого полного приращения, запрошенного в ходе осуществляемой в настоящей момент операции по опросу первого полного приращения. Таким образом, имеет место задержка на один такт опроса между операцией опроса первого полного приращения первого узла и операцией переноса второго полного приращения, соответствующего этому запрошенному первому полному приращению.
В ходе операции S28 определяют одинаково для обоих случаев оба следующих переходных положения, то есть значения, предназначенные для использования в следующей операции получения второго полного приращения, указанным ниже образом:




Далее, до тех пор, пока осуществление способа согласно изобретению не закончено, в операции S38 повышают индекс k на единицу, и операции S31-S39 повторяют, причем весь повторяемый процесс проводят со второй частотой fs, то есть один раз за каждый такт опроса.
Моделирование способа, представленного на фигуре 4, с применением фактических данных от датчика в качестве частичных приращений, в результате показало, что после вхождения в установившийся режим процесса второе полное приращение удовлетворяет требованиям как по интегральному критерию погрешности, так и по дифференциальному критерию погрешности даже в случае обременения частот fa и fs фазовыми флуктуациями.
Таким образом, способ, представленный на фигуре 4, более надежен в отношении флуктуаций первой частоты fa или второй частоты fs по сравнению со способом, представленным на фигуре 3. Однако создается задержка на один такт l/fs опроса между первым полным приращением и относящимся к нему вторым полным приращением, то есть задержка того второго полного приращения, в котором по меньшей мере частично содержится первое полное приращение. Таким образом, представленный на фигуре 4 способ особенно подходит для такой передачи данных, при которой либо такая задержка не играет никакой роли, имеется возможность учитывать такую задержку при последующей обработке данных.
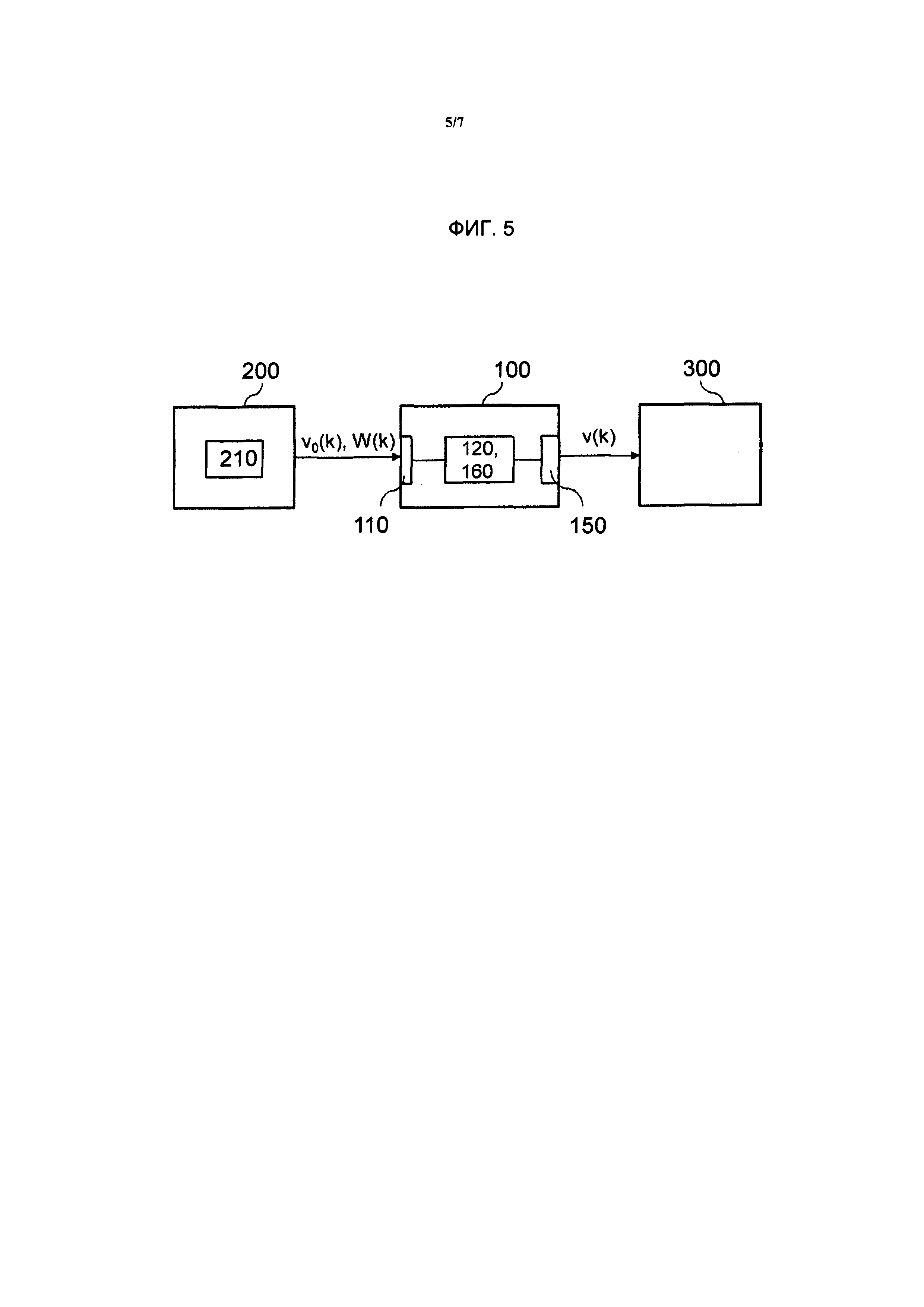
На фигуре 5 в схематичном виде показано устройство 100, предназначенное для осуществления способа, описываемого фигурой 2, а также первый узел 200 и второй узел 300.
Первый блок 200 включает в себя накопитель 210, аккумулирующий данные, или частичные приращения, которые произведены или зарегистрированы с первой частотой fa, и предоставляющий первое полное приращение v0 (k), а также предоставляющий первое значение W(k), которое представляет временное приращение t0(k), относящееся к первому полному приращению, то есть интервал накопления. Первый узел 200 может представлять собой, например, датчик, который производит данные или частичные приращения с первой частотой fa, тактовой частотой информационного канала, и в этом случае включает в себя дальнейшие узлы, например, измерительные блоки и/или блоки обработки. Примерами такого датчика служат, наряду с прочими, датчики скорости вращения или датчики ускорения. У датчиков скорости вращения частичные приращения представляют собой приращения угла, в то время как для датчиков ускорения частичные приращения - это значения частичных приращения скорости. В альтернативном варианте первый узел 200 может также запрашивать с первой частотой fa данные или частичные приращения от дальнейшего узла и аккумулировать их в накопителе 210.
Устройство 100 согласно изобретению включает в себя вход 110, предназначенный для того, чтобы запрашивать или принимать от первого узла 200 первое полное приращение v0(k) и первое значение W(k) со второй частотой fs, фильтр 120 или 160, предназначенный для того, чтобы, используя первое значение W(k), получать из первого полного приращения v0(k) второе полное приращение v(k), и выход 150, предназначенный для того, чтобы переносить второе полное приращение v(k) на второй узел 300 со второй частотой fs.
Второй узел 300 может представлять собой блок обработки результатов и индикации или любой тип обрабатывающего узла, который запрашивает или принимает значения второго полного приращения со второй частотой fs, переданные устройством 100, и соответствующим образом оценивает, сообщает и/или перерабатывает их.
Устройство 100 позволяет синхронизировать данные, получаемые с первой частотой fa, со второй частотой fs. Таким образом, имеется возможность представлять данные, производимые с первой частотой fa, в точном соответствии с тактовым периодом опроса, со второй частотой fs. В частности, устройство 100 делает возможным соблюдение интегрального критерия погрешности и улучшение дифференциального критерия погрешности для независимых друг от друга первой и второй частот, fa и fs.
Устройство 100 представлено на фигуре 5 в качестве отдельного узла, который расположен между первым узлом 200 и вторым узлом 300. Однако возможно также интегрированное устройство 100 в первом узле 200 или во втором узле 300, что позволяет исключить соответственно вход 110 или выход 150.
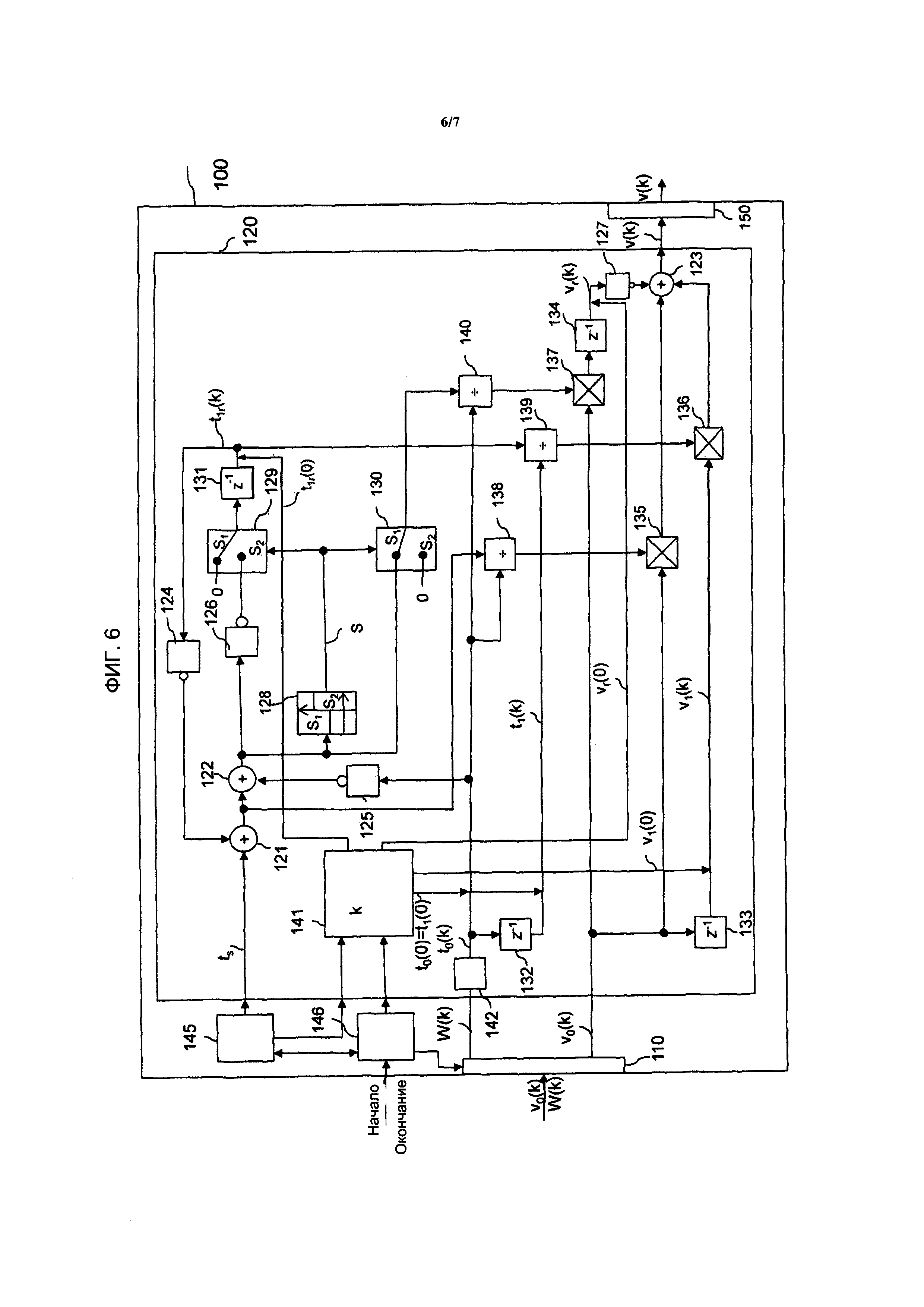
На фигуре 6 показан первый вариант исполнения устройства 100 согласно изобретению, предназначенного для осуществления первого способа согласно изобретению, описываемого со ссылкой на фигуру 3.
В этом варианте исполнения имеются, наряду с уже упомянутыми входом 110 и выходом 150, фильтр 120, память 145 и датчик 146 тактовых импульсов. Датчик 146 тактовых импульсов выполнен с возможностью получения извне в устройство 100 начального сигнала или конечного сигнала и после этого управляет, со второй частотой fs, опросом первого полного приращения v0(k) и первого значения W(k) от первого блока 200, а также установлением индекса k. Начальный и конечный сигналы могут предоставляться первым узлом 200, вторым узлом 300 или другим устройством или пользователем.
В памяти 145 записаны начальные значения величин, необходимых в фильтре 120 для расчета второго полного приращения v(k), и при получении начального сигнала они предоставляются фильтру 120. Кроме того, возможно занесение в память 145 второй частоты fs. Однако возможно также непосредственное предоставление второй частоты fs или соответствующего следующего из нее номинального временного приращения ts вторым блоком 300 либо ее определение на основе одного из отправленных вторым блоком 300 сигналов. Начальные значения, а также номинальное временное приращение подаются на фильтр 120 памятью 145 и/или подводятся извне.
Фильтр имеет счетчик 141, который предоставляет актуальное значение индекса k. При получении начального сигнала датчика 146 тактовых импульсов индекс k в счетчике 141 обнуляют и при каждом следующем такте, заданном датчиком 146 тактовых импульсов, повышают на единицу. Если значение индекса к равно нулю, то счетчик 141 предоставляет начальные значения, то есть t1r(0), t0(0), t1(0), v1(0) и vr(0), соответствующим компонентам фильтра, которые более подробно описываются ниже.
Возможна реализация функциональности различных компонентов устройства 100, например, памяти 145, датчика 146 тактовых импульсов и/или счетчика 141, совместно в одном или нескольких компонентах. Кроме того, также возможно подведение тактового импульса для опроса первого полного приращения и первого значения, а также для повышения индекса k, снаружи, то есть извне устройства 100, так что в устройстве 100 не требуется наличие датчика 146 тактовых импульсов.
Фильтр 120 включает в себя расчетный блок 142, предназначенный для расчета временного приращения t0(k), относящегося к первому полному приращению v0(k), на основе запрошенного первого значения W(k). Если первое значение W(k) уже соответствует временному приращению t0(k), то блок расчета 142 также может быть исключен.
Для расчета второго полного приращения v(k), а также переходных положений t1(k+1), v1(k+1), vr(k+1) и t1r(k+1) фильтр 120 включает в себя, кроме того, сумматоры 121-123, инверторы 124-127, двухпозиционный элемент 128, коммутирующие элементы 129 и 130, блоки 131-134 задержки, блоки 135-137 умножения, а также блоки 138-140 деления. Двухпозиционный элемент 128 предоставляет на выходе сигнал S и делает возможным разграничение случаев по длине номинального временного приращения ts в зависимости от значения суммы величин t1r(k) и t0(k). В случае, если t1r(k)+t0(k)
Точная схема коммутации отдельных компонентов фильтра 120 видна на фигуре 6. Таким образом, фильтр 120 позволяет производить расчет второго полного приращения v(k), а также переходных положений t1(k+1), v1(k+1), v1(k+1) и t1r(k+1) в соответствии с формулами (6), (7) и (8) или, соответственно, (9) и (10), а также (11) и (12).
На фигуре 7 показан первый вариант исполнения устройства 100 согласно изобретению, предназначенного для осуществления второго способа согласно изобретению, описываемого со ссылкой на фигуру 4.
В этом варианте исполнения имеются, наряду с уже упомянутыми входом 110 и выходом 150, фильтр 160, память 145 и датчик 146 тактовых импульсов. На память 145 и датчик 146 тактовых импульсов распространяются сведения, указанные в отношении фигуры 6.
Фильтр имеет счетчик 186, который предоставляет актуальное значение индекса k. При получении начального сигнала от датчика 146 тактовых импульсов индекс k в счетчике 186 обнуляют и при каждом следующем такте, заданном датчиком 146 тактовых импульсов, повышают на единицу. Если значение индекса k равно нулю, то счетчик 186 предоставляет начальные значения, то есть t2r(0), t1r(0), t0(0), t2(0), t1(0), v1(0) и V2(0), соответствующим компонентам фильтра, которые более подробно описываются ниже.
Возможна реализация функциональности различных компонентов устройства 100, например, памяти 145, датчика 146 тактовых импульсов и/или счетчика 186, совместно в одном или нескольких компонентах или отказ отдатчика 146 тактовых импульсов, как это описано со ссылкой на фигуру 6.
Аналогично описанному со ссылкой на фигуру 6, фильтр 160 может включать в себя расчетный блок 187, предназначенный для расчета временного приращения t0(k), относящегося к первому полному приращению v0(k), на основе запрошенного первого значения W(k). Если первое значение W(k) уже соответствует временному приращению t0(k), то блок расчета 142 также может быть исключен.
Кроме того, для расчета второго полного приращения v(k), а также переходных положений t1(k+1), t2(k+1), v1(k+l), v2(k+1), t1r(k+l) и t2r(k+l) фильтр 160 включает в себя сумматоры 161-164, инверторы 165-168, двухпозиционный элемент 169, коммутирующие элементы 170-173, блоки 174-179 задержки, блоки 180-182 умножения, а также блоки 183-185 деления. Двухпозиционный элемент 169 предоставляет на выходе сигнал S и делает возможным разграничение случаев по длине номинального временного приращения ts в зависимости от значения суммы величин t1r(k) и t2r(k). В случае если t1r(k)+t2r(k)
Точная схема коммутации отдельных компонентов фильтра 160 видна на фигуре 7. Таким образом, фильтр 160 позволяет производить расчет второго полного приращения v(k), а также переходных положений t1(k+1), t2(k+1), v1(k+1), v2(k+1), t1r(k+1) и t2r(k+1) в соответствии с формулами (20) или (23), (21) и (22) или (24) и (25), а также (26)-(29).
Реферат
Изобретение относится к передаче данных. Технический результат – обеспечение передачи данных при несинхронизированном переходе между двумя областями с разными тактовыми частотами. Данный способ переноса данных между первым узлом, аккумулирующим данные, произведенные с первой частотой, и вторым узлом, запрашивающим аккумулируемые данные со второй частотой, включает в себя запрос от первого узла первого полного приращения и первого значения параметра, характеризующего временное приращение, которое относится к первому полному приращению, причем первое полное приращение представляет собой информационное содержимое имеющегося к моменту опроса блока данных, аккумулированных в первом узле, получение второго полного приращения из первого полного приращения с использованием первого значения параметра, причем второе полное приращение представляет собой информационное содержимое блока данных, к которому относится номинальное временное приращение, соответствующее второй частоте, и передачу второго полного приращения на второй узел. 2 н. и 13 з.п. ф-лы, 7 ил.
Формула







Документы, цитированные в отчёте о поиске
Синхронно-асинхронный и асинхронно-синхронный преобразователь
Комментарии