Устройство для управления судном - RU2756410C2
Код документа: RU2756410C2
Чертежи




Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к области управления плавучими судами, кораблями и лодками и, в частности, к управлению рыболовными судами, в частности, траулерами.
УРОВЕНЬ ТЕХНИКИ
[0002] За последние десятилетия размеры траулеров увеличились с относительно небольших лодок с очень маленькой командой до больших рыбообрабатывающих траулеров, которые могут находиться в море в течение нескольких недель.
[0003] Хотя размеры судов увеличились, принципы управлениями судами по существу остались теми же. Была добавлена система автопилота, но тем не менее движущая сила главным образом создается двигателем и гребным винтом, а управление главным образом выполняется рулем.
[0004] Следует отметить, что некоторые траулеры и суда других типов были оснащены боковыми гребными винтами и/или азимутальными гребными винтами или другими движущими средствами, но на судах по–прежнему преобладает руль.
[0005] Руль представляет собой простое и надежное устройство для управления судном. В настоящее время он подключен к автопилоту, который устанавливает положение руля в соответствии с заданным направлением. При изменении направления или обнаружении отклонения от заданного направления автопилот изменяет положение руля для возврата судна к требуемому направлению.
[0006] Отклонения от заданного направления чаще всего возникают из–за течений и под влиянием ветра и волн.
[0007] Когда руль направлен прямо вдоль продольной оси судна, он создает небольшое лобовое сопротивление относительно морской воды. Однако, когда судно поворачивает, руль установлен под углом относительно судна. Это существенно увеличивает лобовое сопротивление, и, чем больше угол, тем больше будет лобовое сопротивление. Увеличение лобового сопротивления приводит к увеличению расхода топлива.
[0008] Увеличение размера траулеров требует увеличения руля. Руль большего размера создает большее лобовое сопротивление. Это, в свою очередь, требует больше энергии для преодоления лобового сопротивления.
[0009] Для управления во время тралового лова требуется особенно большой угол руля, так как скорость является относительно низкой и составляет всего несколько узлов. Расход топлива во время тралового лова итак является высоким, а лобовое сопротивление руля дополнительно увеличивает расход.
[0010] Считается, что во время тралового лова очень важен симметричный трал. Симметрия лучше всего достигается при сохранении равномерного натяжения ваеров, т.е. тросов, проходящих между траулером и траловыми досками. Если натяжение ваеров отличается, трал, как правило, не будет симметричным, и раскрытие трала будет не оптимальным. Натяжение регулируется путем разматывания или сматывания одного из ваеров для увеличения или уменьшения его длины.
[0011] Существует множество технологий для определения натяжения и длины ваеров, а также автоматических регулировок для достижения оптимального лова. В документе NO 302391 раскрыт один пример, который учитывает течения при определении надлежащей длины ваеров.
[0012] Также известна технология, позволяющая избежать повреждения ваеров из–за льда путем перемещения траловых блоков внутрь во время тралового лова. Траловые блоки размещают на корме траулера, и определяют, в каком месте ваер можно будет сбросить с судна. Если в море имеется лед, это место не должно слишком близко к борту судна, поскольку лед, движущийся вдоль борта судна, будет попадать внутрь сразу за судном. Следовательно, траловые блоки несколько смещены к центру судна, где лед менее подвижен.
[0013] В документе GB2007181 описываются балки для защиты от льда, которые главным образом предназначены для удерживания буксирных тросов вне контакта со льдом. Балки не могут быть безопасным образом размещены в промежуточных положениях между крайними положениями, проиллюстрированными на чертежах. Следовательно, использование этих балок для управления судном ограничено существенными изменениями направления. Эта технология не может использоваться для меньших или более точных изменений курса, и, разумеется, не может удерживать постоянное направление.
[0014] В документе DE1126271 раскрыта система, выполненная с возможность влияния на направление судна путем перемещения блока (блоков), удерживающего один или оба буксирных троса. Однако отсутствует описание блока управления. Это означает, что перемещение блоков, вероятнее всего, осуществляется вручную и в той степени, которую капитан считает достаточной для изменения курса. Такое ручное перемещение является очень неточным, и капитану придется часто перемещать блоки взад и вперед для сохранения правильного направления.
[0015] Кроме того, в документе DE1126271 не учитываются изменения натяжения буксирных тросов. При перемещении блоков натяжение тросов будет меняться, и это может приводить как к смещению трала, так и к изменению направления судна. Настоящее изобретение учитывает это и направлено на регулировку натяжения при необходимости.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0016] Основная задача настоящего изобретения заключается в снижении расхода топлива траулера во время тралового лова. Для решения этой задачи изобретение уменьшает лобовое сопротивление руля. Для уменьшения лобового сопротивления руля изобретение уменьшает или исключает необходимость установки руля под углом относительно продольной оси судна.
[0017] Решение заключается в использовании возможности смещения положения траловых блоков в поперечном и/или продольном направлении, чтобы натяжение ваеров действовало на судно асимметрично, и соединении исполнительных механизмов для смещения траловых блоков с блоком управления, например, с автопилотом, чтобы автопилот имел возможность управления поперечным и/или продольным положением траловых блоков и мог использовать его для управления судном.
[0018] В частности, это достигается за счет устройства для управления плавучим судном с уменьшенной необходимостью или без необходимости отклонения руля, причем судно буксирует груз, например, трал, содержащего по меньшей мере два буксирных троса, соединенных с соответствующей лебедкой на борту указанного судна, и по меньшей мере два блока на кормовом конце судна, через которые проходит соответствующий буксирный трос, причем по меньшей мере один из блоков выполнен с возможностью перемещения поперечно продольной оси судна и/или в продольном направлении судна; причем положение подвижного блока (блоков) определяет точку приложения силы натяжения буксирного троса, отличающееся тем, что устройство дополнительно содержит блок управления, причем блок управления выполнен с возможностью приема входных данных от навигационной системы, и указанный блок управления соединен с исполнительным механизмом для перемещения указанного блока (блоков) поперечно продольной оси судна и/или в продольном направлении судна для изменения момента силы натяжения относительно центра вращения судна, и тем, что блок управления оснащен вычислительным блоком, который определяет силу натяжения буксирного троса (тросов) и вычисляет момент силы на основе силы натяжения на судне, причем блок управления выполнен с возможностью использования изменения указанного момента силы для управления судном, тем, что блок управления соединен с по меньшей мере одной из указанных лебедок и выполнен с возможностью разматывания или сматывания буксирного троса для уменьшения или увеличения натяжения буксирного троса, соединенного с указанной лебедкой, и тем, что блок управления дополнительно соединен с рулем на судне, так что блок управления при необходимости инициирует отклонение руля, работающее параллельно с перемещением блоков для достижения требуемого направления и курса судна относительно грунта.
[0019] В варианте осуществления с по меньшей мере двумя блоками вычислительный блок предпочтительно вычисляет изменение результирующего момента силы на основе определенной силы натяжения и перемещения по меньшей мере одного блока.
[0020] В дополнительном варианте осуществления каждый буксирный трос в заданной ситуации имеет одинаковую длину или натяжение за счет сматывания или разматывания троса, причем вычислительный блок соединен с исполнительным механизмом на по меньшей мере одной из лебедок для сматывания или разматывания троса.
[0021] В еще одном дополнительном варианте осуществления вычислительный блок выполнен с возможностью сматывания или разматывания буксирного троса, проходящего через блок, который был перемещен, для уменьшения или увеличения натяжения этого троса для достижения одинакового или разного натяжения, которое может требоваться.
[0022] В альтернативном или дополнительном варианте осуществления вычислительный блок выполнен с возможностью сматывания или разматывания буксирного троса с противоположной стороны судна от блока, который был перемещен, для увеличения или уменьшения натяжения этого троса.
[0023] В возможном варианте осуществления вычислительный блок также определяет угол буксирного троса относительно продольной оси судна. Предпочтительно, чтобы углы существенно менялись во время буксировки. Определение угла может предусматривать как горизонтальный угол, так и вертикальный угол.
[0024] В предпочтительном варианте осуществления вычислительный блок определяет комбинированное поперечное и/или продольное перемещение подвижных блоков, которое обеспечивает требуемый момент силы для управления судном. За счет возможности перемещения более чем одного блока может быть достигнут больший диапазон момента силы.
[0025] Задачи изобретения также решаются способом управления плавучим судном с уменьшенной необходимостью или без необходимости отклонения руля, причем судно буксирует груз, например, трал, в котором по меньшей мере два буксирных троса, соединенных с соответствующей лебедкой на борту указанного судна, проходят через по меньшей мере два блока на кормовом конце судна, причем по меньшей мере один из блока (блоков) выполнен с возможностью перемещения поперечно продольной оси судна и/или в продольном направлении судна; причем подвижный блок определяет точку приложения силы натяжения буксирного троса, отличающимся тем, что судно имеет блок управления, причем блок управления соединен с возможностью приема входных данных от навигационной системы, причем часть этих входных данных представляет собой требуемое направление и/или курс судна относительно грунта; причем блок управления содержит вычислительный блок, который заново вычисляет изменение направления относительно момента силы, который обеспечит необходимое изменение направления и/или курса относительно грунта для достижения требуемого направления и/или курса относительно грунта, тем, что вычисляют силу натяжения буксирного троса, тем, что вычисляют поперечное и/или продольное перемещение по меньшей мере одного из блока (блоков), которое обеспечивает требуемый момент силы, и тем, что блок управления передает сигнал в исполнительный механизм, который перемещает блок на расстояние, обеспечивающее требуемый момент силы, и тем, что блок управления соединен с по меньшей мере одной из лебедок для обеспечения разматывания или сматывания буксирного троса для уменьшения или увеличения натяжения буксирного троса, соединенного с указанной лебедкой, и тем, что блок управления дополнительно соединен с рулем на судне для обеспечения при необходимости отклонения руля для достижения требуемого направления и/или курса судна относительно грунта.
[0026] В возможном варианте осуществления вычислительный блок также определяет угол буксирных тросов относительно судна предпочтительно как относительно горизонтальной, так и вертикальной осей.
[0027] В альтернативном варианте осуществления, когда по меньшей мере один из блоков перемещают в продольном и/или поперечном направлении судна, и судно поворачивается относительно направления буксирного троса, непрерывно вычисляют момент силы, полученный из составляющей силы, поперечной указанному судну, указанной силы натяжения и плеча между точкой приложения силы натяжения и центром вращения судна, причем указанное плечо непрерывно регулируют для достижения требуемого момента силы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0028] Далее изобретение будет описано более подробно со ссылкой на варианты осуществления, проиллюстрированные на чертежах, на которых:
Фигура 1 иллюстрирует траулер с тралом, если смотреть сверху,
Фигура 2 иллюстрирует первый вариант осуществления траулера, если смотреть с кормовой части,
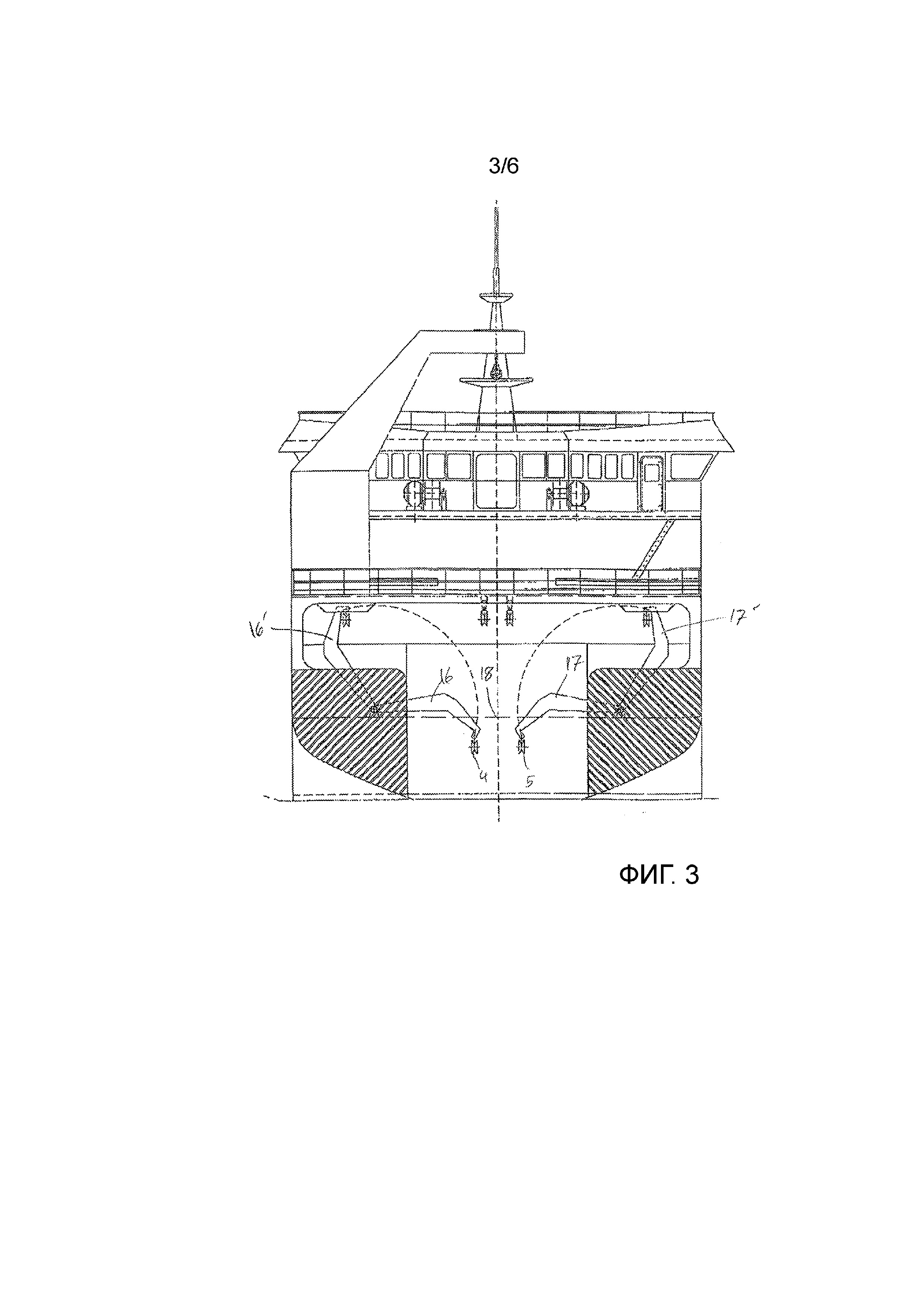
Фигура 3 иллюстрирует другой вариант осуществления траулера, если смотреть с кормовой части,
Фигура 4 иллюстрирует подробный вид Фигуры 1, иллюстрирующий траулер,
Фигура 5 иллюстрирует альтернативный вариант осуществления для достижения изменения точки приложения силы от трала, и
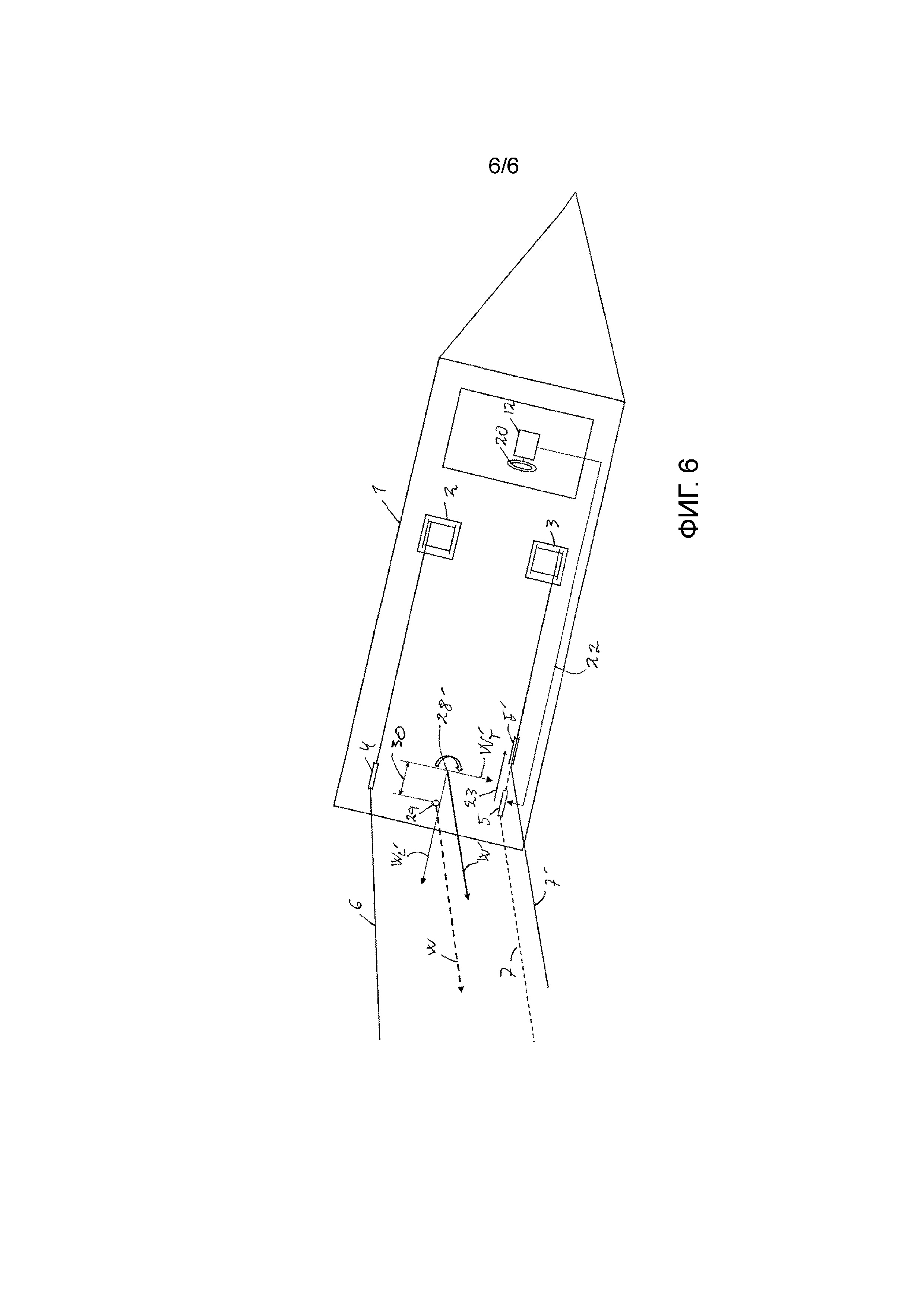
Фигура 6 иллюстрирует вариант осуществления, показанный на Фигуре 5, при повороте судна.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0029] Фигура 1 иллюстрирует траулер 1. Траулер имеет пару траловых лебедок 2, 3. Как правило, имеются дополнительные лебедки, но в целях иллюстрации настоящего изобретения показаны только две лебедки.
[0030] На корме траулера 1 находится пара траловых блоков 4, 5. От каждой лебедки 2, 3 через соответствующий траловый блок 4, 5 до соответствующей траловой доски 8, 9 продолжается пара ваеров 6, 7. Траловые доски соединены с соответствующим концом крыла траловой сети 10.
[0031] Траулер имеет рулевую рубку или мостик 11. В рулевой рубке 11 проиллюстрирован блок 12 управления (здесь и далее в качестве примера представленный устройством автопилота). Автопилот 12 соединен с рулем (не показан) и двигателем (не показан). Он принимает входные данные от навигационной системы, которая обычно является спутниковой (например, GPS), но также может включать в себя компас.
[0032] Все вышеизложенное является общеизвестным в области тралового лова, и детали хорошо известны специалисту в данной области техники.
[0033] Фигура 2 иллюстрирует первый вариант осуществления траулера 1 с кормовой части. На фигуре показан гребной винт 13. Руль не показан.
[0034] На корме находится траловый спуск 14. Также на корме находится портал 15. К порталу 15 подвешена пара траловых блоков 4, 5. Траловые блоки 4, 5 могут перемещаться по порталу.
[0035] Фигура 3 иллюстрирует другой вариант осуществления, в котором траловые блоки 4, 5 расположены на других концах балок 16, 17. Балки могут перемещаться между внешним положением 16’, 17’, в котором траловые блоки 4, 5 находятся в их самом дальнем положении относительно осевой линии 18 судна, и внутренним положением 16, 17, в котором они находятся наиболее близко к осевой линии 18. Балки такого типа в общем называют балками для защиты от льда, поскольку их задача заключает в том, чтобы отвести траловые блоки от льда, который движется вдоль бортов судна.
[0036] Траловые лебедки 2, 3 оснащены датчиками, которые измеряют гидравлическое давление в гидравлических двигателях (не показаны), вращающих лебедки, или в случае лебедки с электрическим приводом измеряют крутящий момент двигателя. Это давление или крутящий момент соответствует натяжению W1, W2 соответствующих ваеров. Также могут быть обеспечены датчики, которые непосредственно измеряют натяжение.
[0037] Как показано на Фигуре 1, натяжения W1, W2 ваеров имеют точки приложения в положениях траловых блоков 4, 5. Когда траловые блоки расположены на одинаковом расстоянии от центра 18 судна, силы W1, W2 натяжения уравновешиваются, и результирующая сила W тянет приблизительно прямо к корме на судне. Однако, если блоки 4, 5 установлены в положениях на разных расстояниях от центра 18, как показано на Фигуре 4, результирующая сила W’ будет иметь точку приложения, смещенную в поперечном направлении относительно длины судна. Эта результирующая сила будет тянуть корму судна в одну сторону. Принцип настоящего изобретения заключается в смещении одного или обоих траловых блоков в поперечном и/или продольном направлении, чтобы результирующая сила W также была смещена, задавая вектор силы в поперечном направлении, как показано стрелкой W’ на Фигуре 4. Таким образом, сила W’ будет действовать на судно с плечом 25 от осевой линии судна. Таким образом, сила будет тянуть судно в одну сторону и, следовательно, разворачивать судно.
[0038] Это более подробно показано на Фигуре 4, которая иллюстрирует траулер 1, показанный на Фигуре 1. В рулевой рубке 11 показано рулевое колесо или штурвал 20, который соединен с автопилотом 12. Также показаны две траловые лебедки 2, 3 и два траловых блока 4, 5. Автопилот 12 соединен с исполнительным механизмом 21, который соединен посредством управляющих тросов 22 с одним из траловых блоков 5. Подобным образом автопилот 12 также может быть соединен с исполнительным механизмом (не показан), который соединен с другим траловым блоком 4. В простейшем варианте осуществления достаточно, чтобы автопилот был соединен только с одним траловым блоком 5. Однако предпочтительно, чтобы автопилот 12 был соединен с обоими траловыми блоками 4, 5.
[0039] Исполнительный механизм 21 может представлять собой гидравлический или электрический исполнительный механизм 12 или любой другой исполнительный механизм, выполненный с возможностью смещения тралового блока 5 в поперечном направлении, как показано стрелкой 23. Разумеется, в пределах настоящего изобретения исполнительный механизм выполнен с возможностью смещения тралового блока 5 в противоположном направлении, т.е. в направлении наружу относительно осевой линии 24 судна 1.
[0040] Если автопилот 12 определяет, что курс судна 1 относительно грунта должен быть изменен, например, в сторону левого борта, он может смещать правый траловый блок 5 к центру судна 1, т.е. ближе к осевой линии 24, как показано ссылочной позицией 5’. Это приведет к смещению результирующей силы W также в направлении левого борта, т.е. в положение, обозначенное W’.
[0041] Таким образом, результирующая сила W’, создаваемая траловыми тросами 6, 7 на судне 1, воздействует на левый борт судна относительно осевой линии 24 с плечом 25. Это создает момент 26 силы на судне, который стремиться сместить или повернуть судно в направлении левого борта. Такой же эффект может быть достигнут при смещении левого тралового блока 4 от осевой линии 24.
[0042] Смещение и/или поворот судна в направлении правого борта произойдет, если левый траловый блок 4 сместится к осевой линии 24 или правый траловый блок 5 сместится от осевой линии.
[0043] В качестве альтернативы смещению одного или более блоков в поперечном направлении также можно смещать блок или блоки в продольном направлении относительно судна. Такой пример проиллюстрирован на Фигуре 5.
[0044] Фигура 5 иллюстрирует блок 5 в его первоначальном положении, в котором он находится на том же расстоянии от кормового конца судна 1, что и противоположный блок 4. Затем блок 5 перемещают на определенное расстояние вперед на судне, как показано стрелкой 23, в положение 5’. Изменение положения блока 5 также приведет к смещению точки приложения тралового троса 7, так что траловый трос будет продолжаться с судна 1, как показано линией 7’.
[0045] Траловый трос 7’ сместится немного наружу от первоначального положения 7. Поскольку траловая сеть находится в нескольких сотнях метров позади судна 1, изменение угла тралового троса 7, 7’ несущественно, поэтому смещение тралового троса 7, 7’ можно рассматривать как параллельное смещение. Следовательно, незначительное смещение тралового троса 7, 7’ наружу также приведет к небольшому смещению результирующей силы траловых тросов 6, 7’ в одну сторону, как показано двойной стрелкой 25, так что вектор W результирующей силы сместится в положение вектора W’ силы. Это создаст момент 26 силы, который сместит центр вращения судна вперед и, возможно, также слегка в поперечном направлении и вызовет поворот судна 1. Момент 26 силы меньше, чем, если бы блок 5 сместился в поперечном направлении на такое же расстояние, но технология смещения блока 5 в продольном направлении может использоваться в качестве дополнения или замены его смещения в поперечном направлении.
[0046] Как видно на Фигуре 5, точка 28 приложения вектора результирующей силы W’ также сместится в продольном направлении судна в точку 28’.
[0047] Также можно комбинировать поперечное и продольное смещение одного или более блоков.
[0048] Хотя продольное смещение точки 28’ приложения вектора результирующей силы имеет ограниченный эффект, когда вектор параллелен центральной оси 24, продольное смещение точки приложения будет иметь реальный эффект, когда судно 1 начнет поворачивать. Это проиллюстрировано на Фигуре 6.
[0049] Как видно на Фигуре 6, результирующая сила W’ может быть разложена на поперечную составляющую WT’ силы и продольную составляющую WL’ силы. Обе составляющие стремятся повернуть судно вокруг центра 29 вращения, но поперечная составляющая WT’ действует на существенно более длинном плече 30, чем продольная составляющая WL’. Чем больше поворот судна относительно трала, т.е. направления траловых тросов 6, 7, тем больше будет поперечная составляющая WT’ силы, и тем больше, в свою очередь, будет момент силы, действующий для поворота судна.
[0050] За счет регулировки продольного положения блока 5 может регулироваться плечо 30 между центром вращения и точкой приложения для создания момента силы, необходимого для поворота судна 1. Например, блок может смещаться дальше назад при увеличении поперечной составляющей WT’ силы с уменьшенным углом между центральной осью судна и траловыми тросами 6, 7 для уменьшения плеча 30 и, следовательно, сохранения момента 26 сила по существу постоянным.
[0051] Чем больше один из траловых блоков смещается в поперечном и/или продольном направлении, или оба траловых блока смещаются в поперечном направлении в одну сторону, тем больше сила W’ смещается в ту же сторону, и тем более резко поворачивает судно. Этот поворот судна может быть выполнен без изменения положения руля. Руль может удерживаться в нулевом положении, т.е. параллельно продольной оси судна, или может поворачиваться вместе с потоком воды. Следовательно, лобовое сопротивление, создаваемое рулем, не будет увеличиваться, и расход топлива может поддерживаться на одном уровне.
[0052] При смещении одного или более траловых блоков в поперечном и/или продольном направлении траектория прохождения тралового троса от кормы судна до лебедки несколько изменится. Это может привести к более длинной или более короткой траектории троса по борту судна. Вычислительный блок может быть настроен так, чтобы учитывать это изменение длины траектории и регулировать длину троса для компенсации этого изменения длины траектории.
[0053] Предпочтительный вариант осуществления изобретения, проиллюстрированный на фигурах, работает следующим образом.
Автопилот, соединенный с исполнительным механизмом (механизмами) 21, который смещает траловые блоки 3, 4, также принимает значение натяжения ваеров. Когда автопилот 12 определяет необходимость изменения направления либо из–за отклонения судна от намеченного курса относительно грунта, либо из–за изменения в результате ручного или автоматического ввода курса относительно грунта, автопилот вычисляет момент силы, необходимый для поворота судна на намеченный курс относительно грунта. Он проверяет натяжение ваеров, вычисляет результирующую силу W и определяет плечо 25 или 30, необходимое результирующей силе W для создания требуемого момента силы. Если требуемое плечо 25 или 30 может быть достигнуто путем смещения только одного тралового блока 4, 5, автопилот передает сигнал соответствующему исполнительному механизму 21 для смещения одного из траловых блоков 4, 5 на расстояние, соответствующее требуемому плечу.
[0054] Если требуемое плечо 25, 30 не может быть достигнуто путем смещения только одного из блоков 4, 5, автопилот делит расстояние смещения между блоками и подает сигнал обоим исполнительным механизмам для смещения соответствующего из блоков 4, 5.
[0055] При достижении намеченного курса относительно грунта автопилот подает сигнал исполнительному механизму (механизмам) 21 для смещения одного блока, который был смещен, или обоих блоков 4, 5 обратно в положение, в котором результирующая сила W действует на судно по осевой линии 24, или для продольного смещения, при котором плечо 30 близко к нулю.
[0056] В зависимости от судна и трала вместо поворота носа судна в направлении намеченного направления, оно может «ползти» боком или частично боком по намеченному курсу относительно грунта, но при этом нос будет указывать в другом направлении. Это может быть вполне приемлемым.
[0057] При наличии поперечного течения или другого влияния, которое стремится отклонить судно от правильного курса относительно грунта, автопилот может удерживать блоки 4, 5 на разном расстоянии от осевой линии 24 или в разном продольном положении.
[0058] В соответствии с изобретением также можно комбинировать поперечное и/или продольное смещение одного или обоих траловых блоков 4, 5 с установкой руля под углом. Это особенно удобно, если изменение курса относительно грунта имеет величину, которая не может быть достигнута путем перемещения блоков 4, 5. Требуемое отклонение руля в этом случае будет иметь существенно меньшую величину, чем если бы изменение курса относительно грунта выполнялось только за счет руля.
[0059] Если судно имеет азимутальные подруливающие устройства, колонки или другие средства управления вместо руля, они будут расположены так, чтобы оказывать наименьшее лобовое сопротивление в воде.
[0060] Хотя натяжение ваеров 6, 7 в идеале должно быть равномерным во время буксировки, в некоторых случаях натяжение может быть неравномерным. Автопилот будет учитывать это. Отклонения от равномерного натяжения могут приводить к изменению направления судна или к разным силам, действующим на буксируемое оборудование. Обычно это решается путем выравнивания натяжения (обычно, представленного гидравлическим давлением) в лебедочной системе, т.е. на практике путем разматывания или сматывания одного из ваеров.
[0061] Когда судно движется прямо вперед, но подвергается боковым течениям, или испытывает не резкий поворот (например, когда трал следует вдоль берега), один из блоков будет перемещаться, например, перемещаться в направлении внутрь. Таким образом, судно будет поворачивать в том же направлении, что и перемещение. Это приводит к тому, что ваеры с внешней стороны поворота испытывают увеличенное натяжение. В то же время ваеры с внутренней стороны поворота испытывают уменьшенное натяжение. Это может противодействовать повороту судна. Для предотвращения этого ваеры с внешней стороны поворота будут ослабляться за счет разматывания троса, и/или ваеры с внутренней стороны будут натягиваться за счет сматывания троса до тех пор, пока ваеры не будут иметь требуемое натяжение. Автопилот соединен с исполнительным механизмом на лебедке для осуществления сматывания или разматывания троса.
[0062] Результирующая сила трала в идеале должна быть параллельна осевой линии судна при движении судна прямо вперед. Однако в определенных условиях она может быть под углом к осевой линии. Следовательно, предпочтительно измерять угол ваеров относительно судна, чтобы учитывать угол приложения результирующей силы.
[0063] Хотя выше описано управление траулером, настоящее изобретение также может быть использовано для управления судами другого типа, которые тянут за собой груз. Одним примером таких судов являются буксиры. Другим примером являются сейсморазведочные суда. К сейсморазведочным судам прикреплено от одной до множества сейсмических кос. За счет прохождения косы через блок непосредственно перед тем, как коса сходит с судна, и за счет размещения блока так, что он может смещаться в поперечном и/или продольном направлении, точка приложения силы лобового сопротивления косы может смещаться в поперечном и/или продольном направлении. Сила лобового сопротивления сейсмической косы в общем существенно меньше, чем сила лобового сопротивления трала, но используя силу лобового сопротивления в качестве средства изменения направления судна, можно уменьшить необходимое отклонение руля и, следовательно, уменьшить лобовое сопротивление руля.
Реферат
Изобретение относится к устройству и способу управления судами, которые буксируют груз. Судно имеет блок на кормовом конце, через который проходит по меньшей мере один буксирный трос. Блок выполнен с возможностью перемещения поперечно продольной оси или в продольном направлении судна. Положение подвижного блока определяет точку приложения силы натяжения буксирного троса. Автопилот соединен с исполнительным механизмом, перемещающим указанный блок для изменения момента силы относительно точки вращения судна, а также автопилот имеет вычислительный блок, который определяет силу натяжения и вычисляет момент силы на судне. Затем автопилот может использовать изменение указанного момента силы для управления судном. Достигается снижение расхода топлива траулера во время тралового лова. 2 н. и 10 з.п. ф-лы, 6 ил.

Комментарии