Интегральная система датчиков - RU2532575C2
Код документа: RU2532575C2
Чертежи










































Описание
УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Область техники, к которой относится изобретение
Настоящее изобретение относится к емкостному датчику для измерения расстояния, в частности к емкостному датчику для измерения расстояния до мишени в литографическом устройстве.
Описание известного уровня техники
Литографические машины, в которых применяют заряженные частицы, и оптические литографические машины и контрольно-измерительные машины используются для экспонирования рисунков на полупроводниковые пластины и иные мишени, обычно в качестве части технологического процесса производства полупроводниковых приборов. В литографической системе полупроводниковую пластину обычно экспонируют во множестве мест экспонирующими пучками оптического излучения или частиц, сгенерированными литографической машиной. Полупроводниковую пластину обычно размещают на столе для полупроводниковых пластин, и множественное экспонирование обычно реализуют путем управляемого перемещения стола для полупроводниковых пластин относительно неподвижной электронной/оптической колонки. Экспонирование обычно производят непрерывно на поверхности полупроводниковой пластины.
Поверхность полупроводниковой пластины, подлежащей экспонированию, почти никогда не является абсолютно плоской. Типичная полупроводниковая пластина может иметь существующий в ней прогиб до 50 мкм без прижима к столу для полупроводниковых пластин. Помимо прогиба полупроводниковой пластины поверхность полупроводниковой пластины может иметь другие неровности по ее поверхности. Прогиб полупроводниковой пластины и иные неровности приводят к изменениям высоты поверхности полупроводниковой пластины. Для достижения чрезвычайно высокой точности, требуемой от современных литографических машин, необходимо компенсировать это изменение высоты для того, чтобы экспонируемая поверхность полупроводниковой пластины оставалась в фокальной плоскости проекционного объектива, используемого для фокусировки экспонирующих оптических пучков или пучков частиц на полупроводниковую пластину.
Стол для полупроводниковых пластин, который удерживает полупроводниковую пластину, может быть отрегулирован для компенсации этих изменений высоты поверхности полупроводниковой пластины. Высота стола для полупроводниковых пластин может быть отрегулирована так, чтобы экспонирование поверхности полупроводниковой пластины происходило в фокальной плоскости проекционного объектива. Регулирование высоты стола для полупроводниковых пластин может быть осуществлено с использованием сигналов, переданных из датчиков, которые измеряют высоту поверхности полупроводниковой пластины, например расстояние между проекционным объективом и поверхностью полупроводниковой пластины. Для обеспечения правильного регулирования положения полупроводниковой пластины с максимальной точностью, требующейся для современных литографических машин, необходимы высокочувствительные датчики. Для прикладной задачи этого типа использовались датчики различных типов, в том числе емкостные зонды. Однако существующие емкостные зонды и соответствующие измерительные системы и системы управления имели некоторые недостатки.
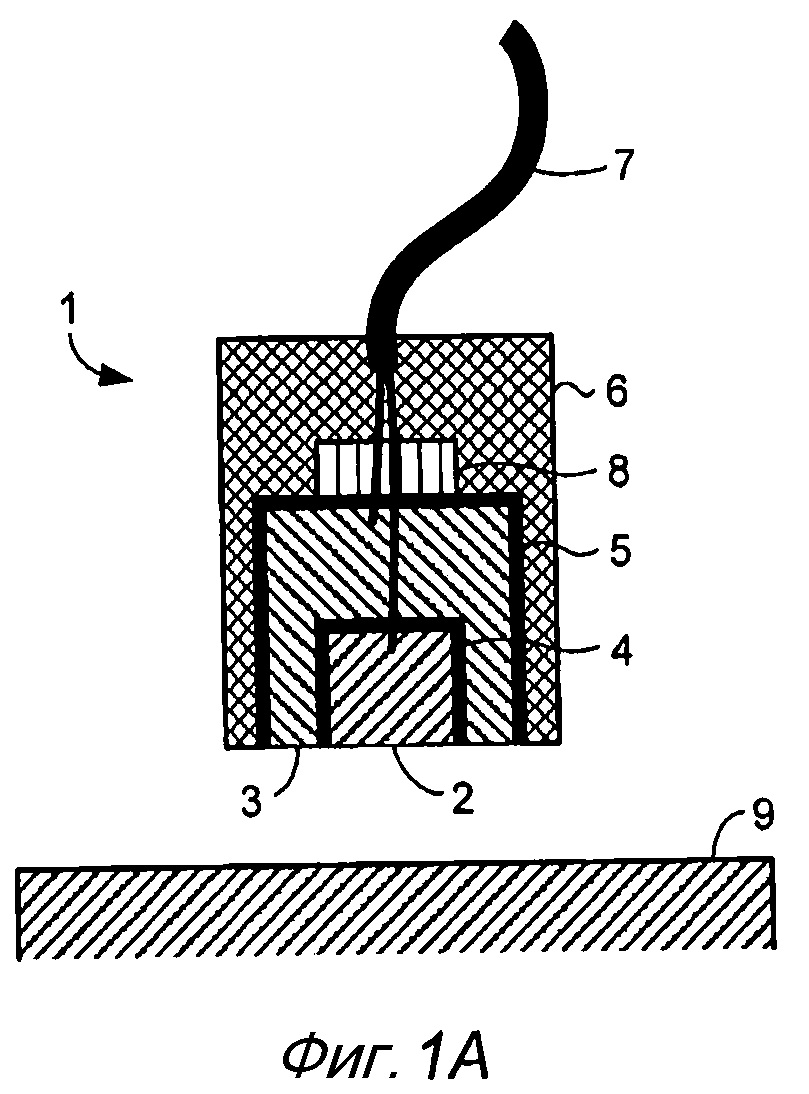
Существующие емкостные датчики обычно являются большими как по высоте, так и по площади датчика. На Фиг. 1A и Фиг. 1B показана конструкция емкостного датчика из предшествующего уровня техники. На Фиг. 1A датчик-зонд показан на виде в разрезе, а на Фиг. 1B он показан на виде с торца. Проводящий измерительный электрод 2 окружен проводящим охранным электродом 3. Изолирующий слой 4 разделяет эти два электрода, а другой изолирующий слой 5 может использоваться для отделения охранного электрода 3 от корпуса 6. Электрический кабель 7 и соединитель 8 соединяют датчик с системой обработки сигналов для получения желательного результирующего сигнала от измерительного прибора. Рабочий диапазон датчика зависит от измерительной области под измерительным электродом 2. Потенциал охранного электрода 3 установлен равным потенциалу измерительного электрода для ограничения электрического поля в пределах измерительной области для генерации относительно однородного электрического поля между измерительным электродом 2 и мишенью 9. Конструкция этого типа приводит к относительно высокому датчику, как правило, высотой около 20 мм, и к относительно большому измерительному электроду.
Относительно большая высота и ширина датчиков требуют, чтобы датчики были расположены относительно далеко от проекционного объектива, что вносит погрешности вследствие изменения относительного позиционирования датчиков и проекционного объектива вследствие производственных допусков и теплового расширения. Относительно большой размер существующих емкостных зондов также требует, чтобы отдельные датчики в конфигурациях с множеством датчиков были расположены относительно далеко друг от друга, что уменьшает пространственное разрешение измерительной системы, вследствие чего могут не обнаруживаться неровности на поверхности полупроводниковой пластины, имеющие место на небольшой площади поверхности полупроводниковой пластины. Относительно большое расстояние между ними также приводит к более медленной процедуре измерений, что уменьшает производительность литографической машины, в которой используют эти системы.
В патенте Великобритании № 2,131,176 описан емкостный зонд для измерения расстояния, изготовленный путем склеивания друг с другом двух термопластических полимерных пленок с покрытием из меди, нанесенным на одну сторону так, чтобы покрытая медью лицевая сторона одного листа была соединена с лицевой стороной другого листа, не имеющей покрытия. Экспонируемое покрытие из меди на одном листе разделено на первую область, которая образует измерительный электрод, и вторую область, которая, по меньшей мере, частично окружает измерительный электрод и электрически связана с покрытием из меди на другом листе, образуя охранный электрод для измерительного электрода. Эта конструкция имитирует конструкцию, показанную на чертеже Фиг. 1, обеспечивая наличие охранного электрода, окружающего измерительный электрод, причем оба электрода: охранный электрод, окружающий измерительный электрод, и измерительный электрод сформированы на одной и той же поверхности и на одном и том же уровне многослойного устройства. Это приводит к конструкции, которая требует наличия электрического соединения между различными проводящими слоями и, соответственно, требует более сложного и дорогостоящего технологического процесса изготовления.
Кроме того, сложно создать проводные соединения с этими датчиками, и межсоединения вносят емкости, которые влияют на показания датчика и которые необходимо учитывать, обычно датчик калибруют совместно с проложенными межсоединениями. Необходимость калибровки существующих датчиков совместно с межсоединениями датчиков требует повторной калибровки всякий раз, когда производится замена датчика, что делает эту замену сложной, трудоемкой и дорогостоящей.
В патенте США № 4,538,069 описан способ калибровки емкостного датчика высоты для литографической машины с одним пучком электронов для экспонирования шаблонов. Датчик высоты сначала калибруют в калибровочном приспособлении с использованием лазерного интерферометра, и устройство затем переставляют в литографическую станцию для экспонирования шаблона, и расстояние до шаблона измеряют емкостным датчиком. Емкостные датчики сформированы на подложке, которая прикреплена к основанию корпуса системы фокусировки электронного пучка. Шаблон-мишень заземлен, емкостные датчики приводят в действие сигналами, сдвинутыми по фазе на 180°, и выходной сигнал с каждого датчика обрабатывают по отдельности для генерации четырех сигналов измерения высоты.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящем изобретении предпринята попытка устранения или уменьшения вышеупомянутых недостатков для создания усовершенствованной интегральной системы датчиков для литографической машины, причем эта система содержит систему проекционного объектива для фокусировки одного или более экспонирующих пучков на мишень, подвижный стол для транспортировки мишени, емкостную измерительную систему для проведения измерений, связанных с расстоянием между последним фокусирующим элементом системы проекционного объектива и поверхностью мишени, и блок управления для управления перемещением подвижного стола для регулировки положения мишени, по меньшей мере, частично на основании сигнала из емкостной измерительной системы. Емкостная измерительная система содержит множество емкостных датчиков, каждый из которых содержит тонкопленочную структуру. Емкостные датчики и последний фокусирующий элемент системы проекционного объектива установлены непосредственно на общем основании, и датчики расположены в непосредственной близости к краю последнего фокусирующего элемента системы проекционного объектива.
По меньшей мере, некоторые из датчиков могут быть расположены так, что нижняя поверхность измерительного электрода датчика, обращенная к мишени, расположена, по существу, на той же самой высоте, что и нижняя поверхность последнего фокусирующего элемента системы проекционного объектива в направлении оси z, перпендикулярном к поверхности мишени. По меньшей мере некоторые из датчиков могут быть расположены так, что нижняя поверхность измерительного электрода датчика, обращенная к мишени, расположена в пределах 50 микрон от нижней поверхности последнего фокусирующего элемента системы проекционного объектива в направлении оси z, перпендикулярном к поверхности мишени. По меньшей мере некоторые из датчиков могут иметь толщину 50-150 микрон, предпочтительно около 100 микрон, от задней поверхности датчика до передней поверхности измерительного электрода датчика, обращенной к мишени. Последний фокусирующий элемент системы проекционного объектива может иметь толщину 100-150 микрон.
Датчики расположены близко к последнему фокусирующему элементу, и могут быть расположены в пределах ширины или длины размера рабочего поля литографической машины на краю последнего фокусирующего элемента. Последним фокусирующим элементом может являться нижний элемент системы проекционного объектива. Емкостные датчики и последний фокусирующий элемент системы проекционного объектива непосредственно соединены друг с другом.
Каждый из емкостных датчиков может содержать тонкопленочную структуру, где эта тонкопленочная структура содержит первый изолирующий слой и первую проводящую пленку, содержащую измерительный электрод, сформированный на первой поверхности первого изолирующего слоя, вторую проводящую пленку, содержащую задний охранный электрод, расположенный на второй поверхности первого изолирующего слоя и первой поверхности второго изолирующего слоя, причем периферийная часть заднего охранного электрода продолжается за пределы измерительного электрода и окружает его, образуя боковой охранный электрод, объединенный с задним охранным электродом. Тонкопленочная структура емкостных датчиков может дополнительно содержать третью проводящую пленку, содержащую экранирующий электрод, расположенный на второй поверхности второго изолирующего слоя. Тонкопленочная структура может быть гибкой.
Емкостная измерительная система может содержать активные электронные компоненты, расположенные на удалении от измерительных электродов без активных электронных компонентов, расположенных вместе с датчиками. Каждый датчик может дополнительно содержать удлиненный соединительный элемент, содержащий гибкую мембрану, на которой напечатаны или к которой прикреплены токопроводящие дорожки, причем эти токопроводящие дорожки электрически соединены с измерительным электродом и с задним охранным электродом датчика на одном конце и с соединителем на другом конце. Токопроводящие дорожки могут быть сформированы на первом изолирующем слое, и первый изолирующий слой может содержать первую область, где расположены измерительный электрод и задний охранный электрод, и вторую удлиненную область, на которой сформированы токопроводящие дорожки.
Емкостные датчики могут содержать множество пар емкостных датчиков, сформированных на тонкопленочном изолирующем слое основы, причем этот тонкопленочный изолирующий слой основы непосредственно установлен на общем основании. Система может дополнительно содержать один или более источников питания переменного тока, выполненных с возможностью запитывать первый датчик из пары датчиков переменным током или напряжением, имеющим сдвиг по фазе на 180 градусов относительно тока или напряжения для второго датчика из этой пары датчиков.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже приведено объяснение различных аспектов настоящего изобретения со ссылкой на варианты его осуществления, показанные на чертежах, на которых изображено следующее:
на Фиг. 1A изображен емкостный датчик на виде в разрезе;
на Фиг. 1B емкостный датчик из Фиг. 1A показан на виде с торца;
на Фиг. 2 изображена упрощенная схема расположения электродов в виде параллельных пластин;
на Фиг. 3 изображена схема емкостного датчика-зонда и заземленной проводящей мишени;
на Фиг. 4 изображена схема двух емкостных датчиков-зондов в компоновке для дифференциальных измерений с заземленной проводящей мишенью;
на Фиг. 5 на виде в разрезе изображен емкостный датчик, содержащий тонкопленочную структуру;
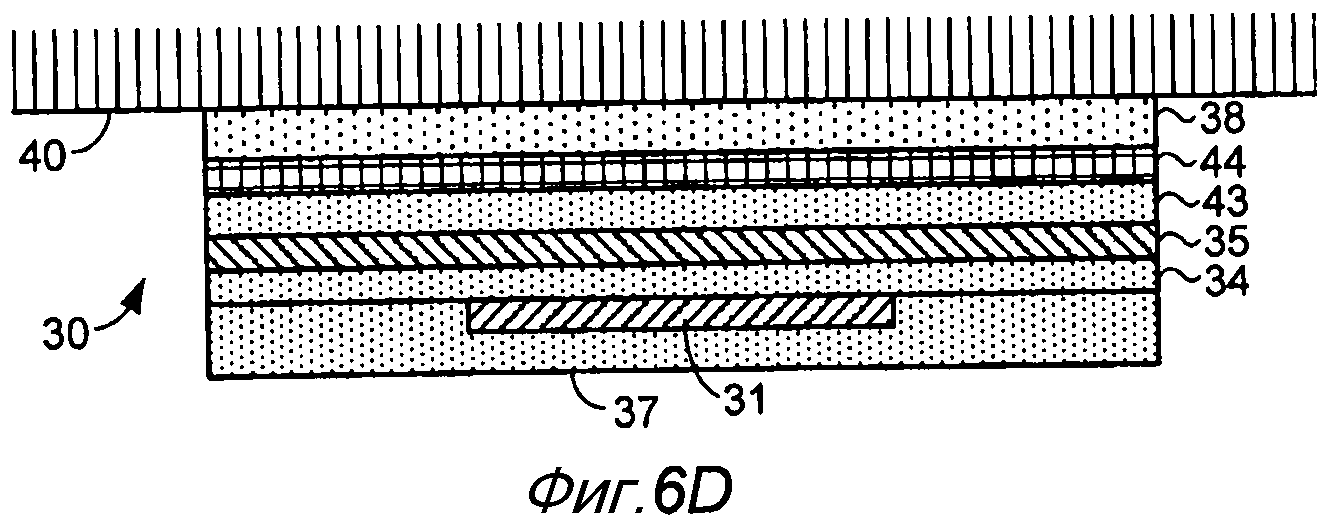
на Фиг. 6A, Фиг. 6B, Фиг. 6C и Фиг. 6D на виде в разрезе изображены различные варианты осуществления тонкопленочного датчика;
на Фиг. 6E на виде сверху изображен датчик из Фиг. 6A и 6B;
на Фиг. 6F на виде сверху изображен датчик из Фиг. 6D;
на Фиг. 7A на виде сверху изображен тонкопленочный датчик с квадратным измерительным электродом;
на Фиг. 7B на виде в разрезе изображен датчик из Фиг. 8A;
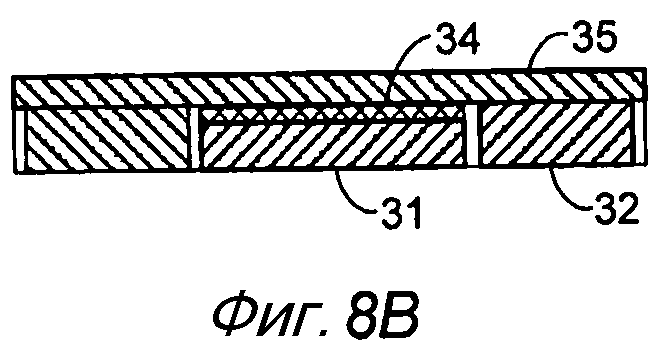
на Фиг. 8A на виде сверху изображен тонкопленочный датчик с круглым измерительным электродом;
на Фиг. 8B на виде в разрезе изображен датчик из Фиг. 8A;
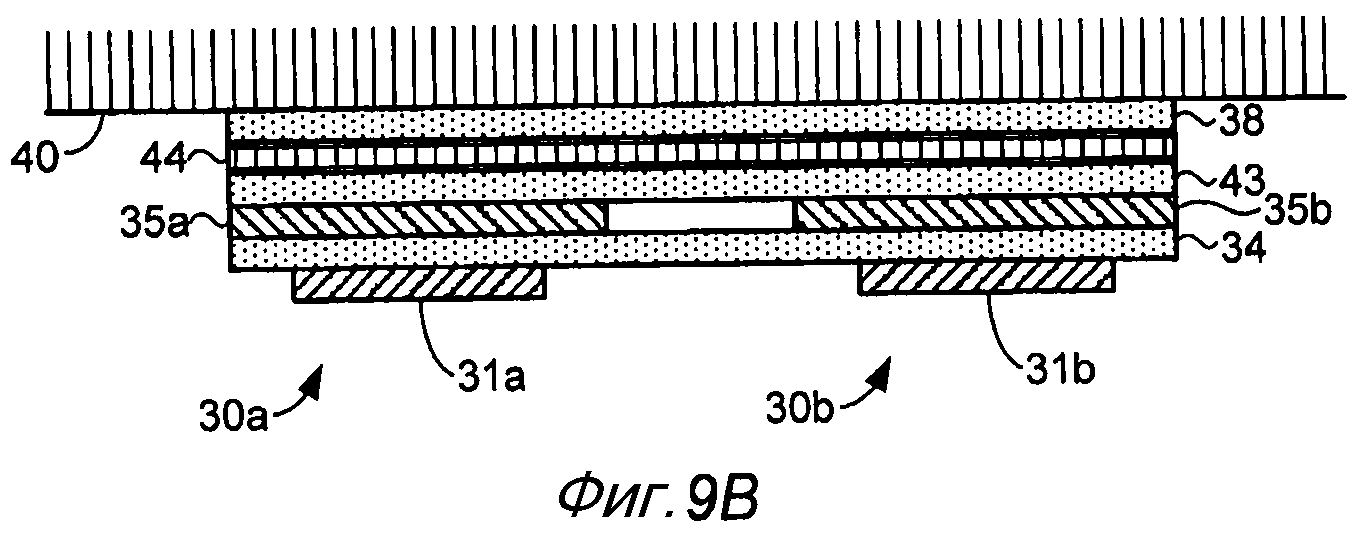
на Фиг. 9A, Фиг. 9B и Фиг. 9C на виде в разрезе изображены различные варианты осуществления интегрального дифференциального тонкопленочного датчика;
на Фиг. 9D на виде сверху изображен интегральный дифференциальный тонкопленочный датчик;
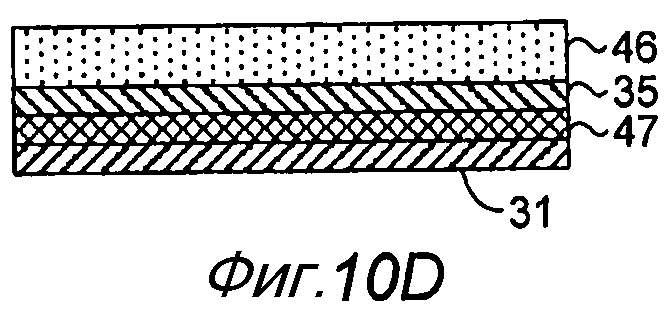
на Фиг. 10A-10D на виде в разрезе изображены тонкопленочные емкостные датчики;
на Фиг. 11 на виде сверху изображен датчик с соединительными шинами и контактными площадками;
на Фиг. 12A-12B на виде в разрезе изображены структуры контактных площадок;
на Фиг. 13A-13D изображены схемы датчиков, соединительных шин и контактных площадок, сформированных на общей подложке;
на Фиг. 14 на виде сбоку изображены датчики, установленные на литографической машине;
на Фиг. 15A и Фиг. 15B изображены схемы гибкого печатного соединителя;
на Фиг. 16A и Фиг. 16B на виде в разрезе изображена стопа линз проекционного объектива литографической машины, в которой применяют заряженные частицы;
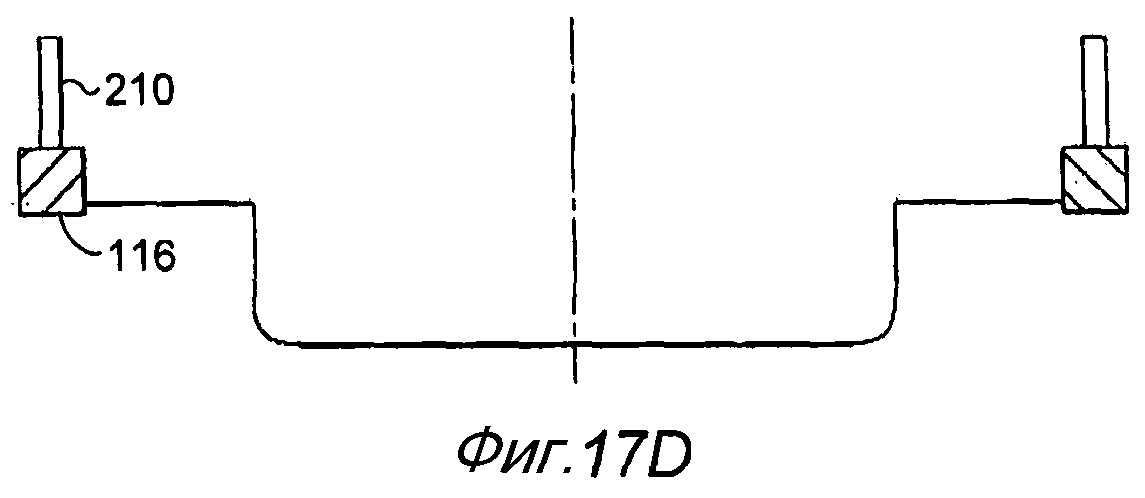
на Фиг. 17A-17D изображены схемы конструкции гибкой печатной платы с множеством датчиков и интегрированными гибкими печатными соединителями;
на Фиг. 18 изображена другая компоновка соединений датчиков на литографической машине;
на Фиг. 19A и Фиг. 19B изображены схемы компоновок для монтажа конструкции, представляющей собой интегральную гибкую печатную плату, на литографической машине;
на Фиг. 20A и Фиг. 20B изображены схемы конфигураций емкостных датчиков на монтажной пластине;
на Фиг. 20C и Фиг. 20D изображены схемы емкостных датчиков, расположенных в диагональной конфигурации;
на Фиг. 21A и Фиг. 21B изображены схемы тонкопленочной структуры со сформированным на ней множеством емкостных датчиков;
на Фиг. 21C изображена схема конструкции гибкой печатной платы с множеством датчиков и интегрированными гибкими печатными соединителями;
на Фиг. 21D на виде в разрезе изображен интегрированный гибкий печатный соединитель;
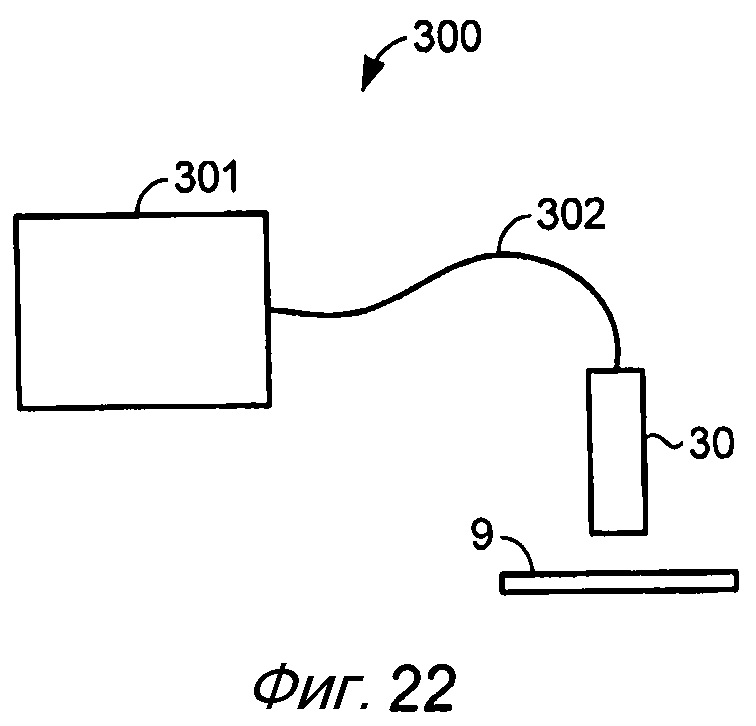
на Фиг. 22 изображена блок-схема системы датчиков и системы обработки сигналов;
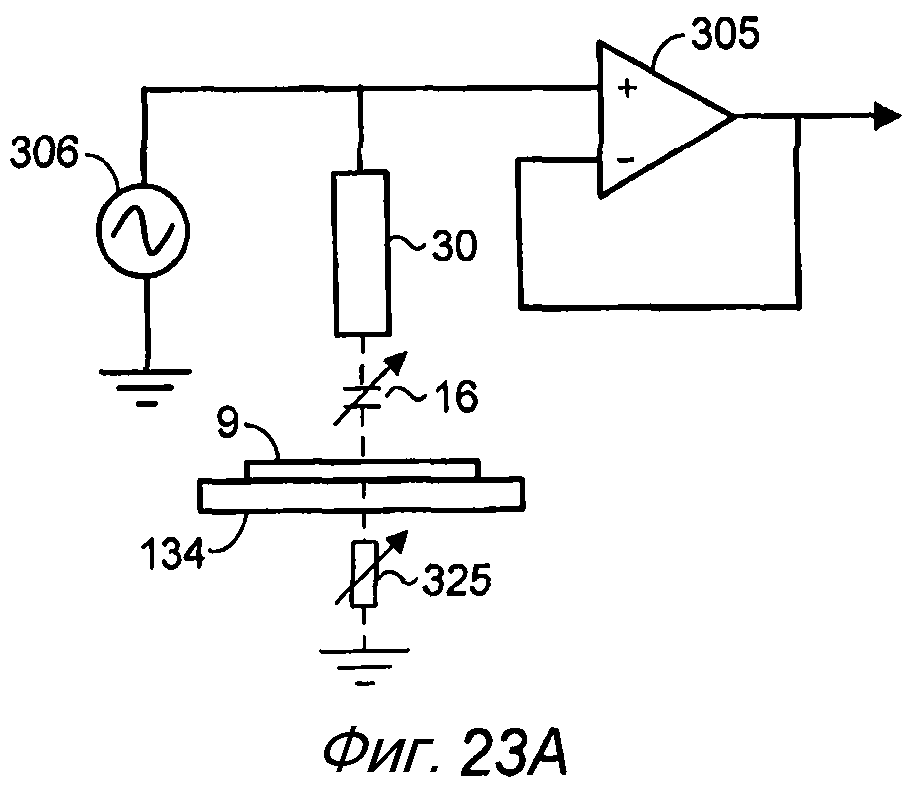
на Фиг. 23A изображена упрощенная принципиальная электрическая схема высокоимпедансного усилителя с источником тока;
на Фиг. 23B изображена упрощенная принципиальная электрическая схема устройства дифференциального датчика с источником тока;
на Фиг. 24A изображена упрощенная принципиальная электрическая схема устройства моста Уитстона с источником напряжения;
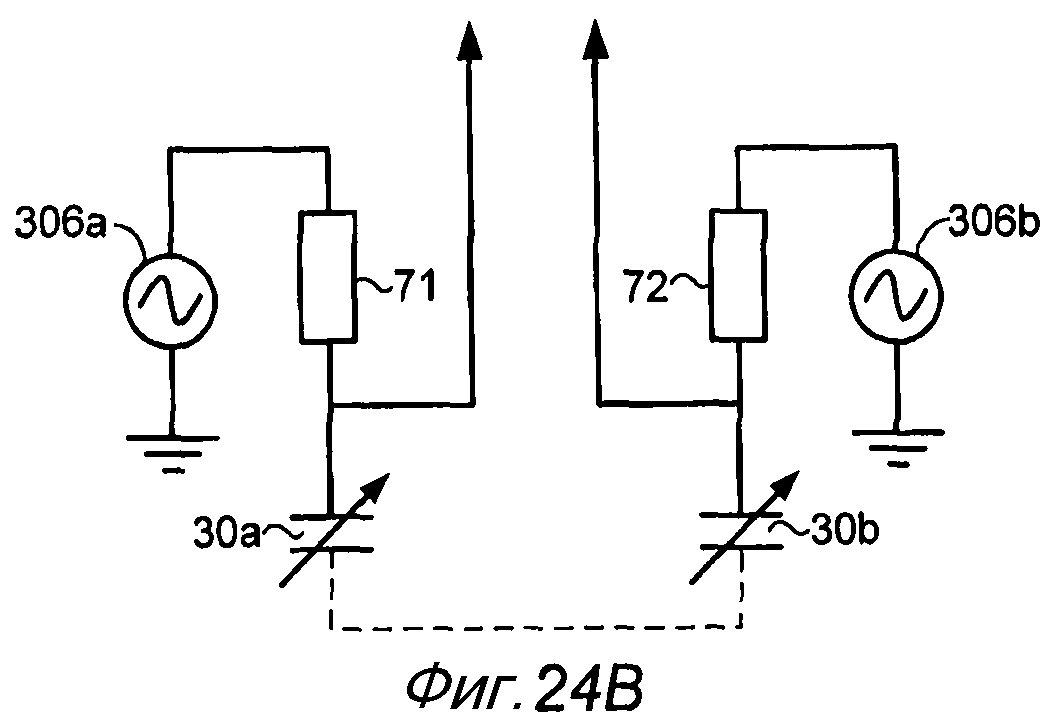
на Фиг. 24B изображена упрощенная принципиальная электрическая схема устройства дифференциального датчика с источником напряжения;
на Фиг. 25 изображена упрощенная принципиальная электрическая схема цепи дифференциального датчика;
на Фиг. 26 изображена упрощенная принципиальная электрическая схема синхронного детектора;
на Фиг. 27 изображена блок-схема, на которой показаны емкости в системе датчиков;
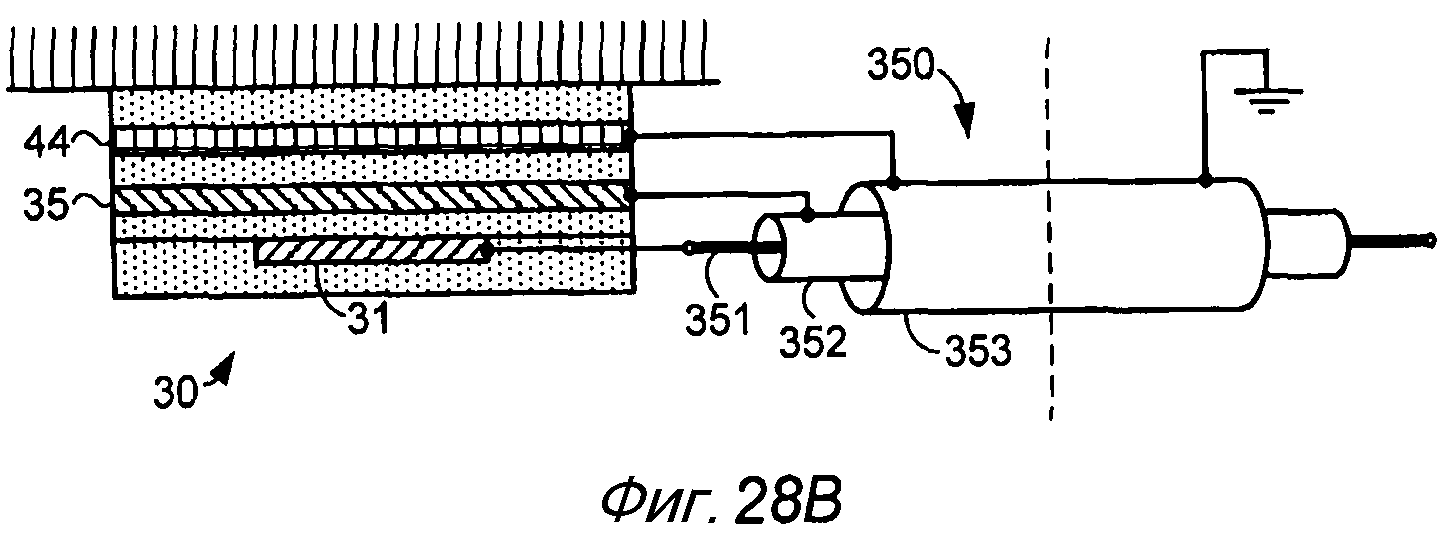
на Фиг. 28A и Фиг. 28B изображены упрощенные схемы соединения устройства с кабелем, соединяющим датчик со схемой обработки сигналов;
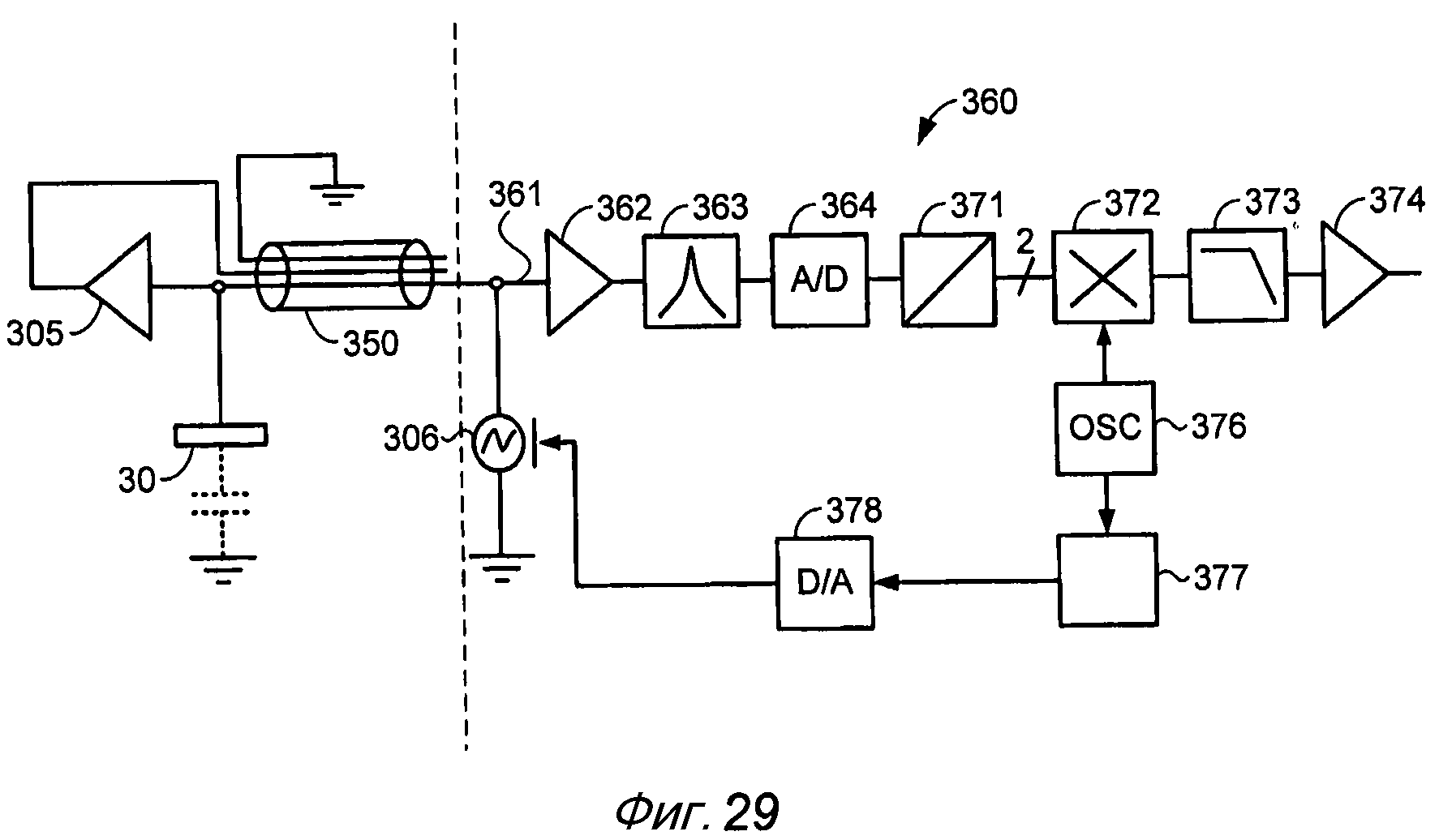
на Фиг. 29 изображена упрощенная принципиальная электрическая схема другого варианта осуществления синхронной схемы;
на Фиг. 30 изображена упрощенная принципиальная электрическая схема устройства обработки сигналов из дифференциальной пары датчиков;
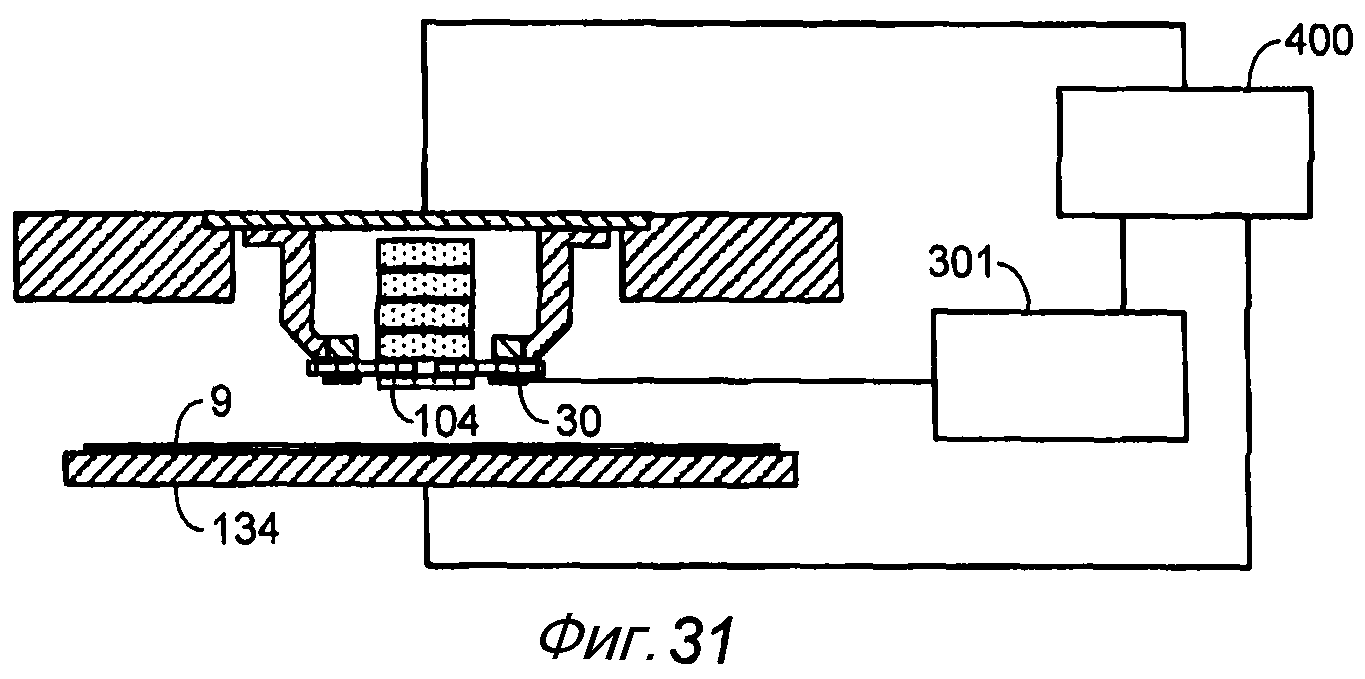
на Фиг. 31 изображена блок-схема системы управления для позиционирования полупроводниковой пластины для литографической машины; и
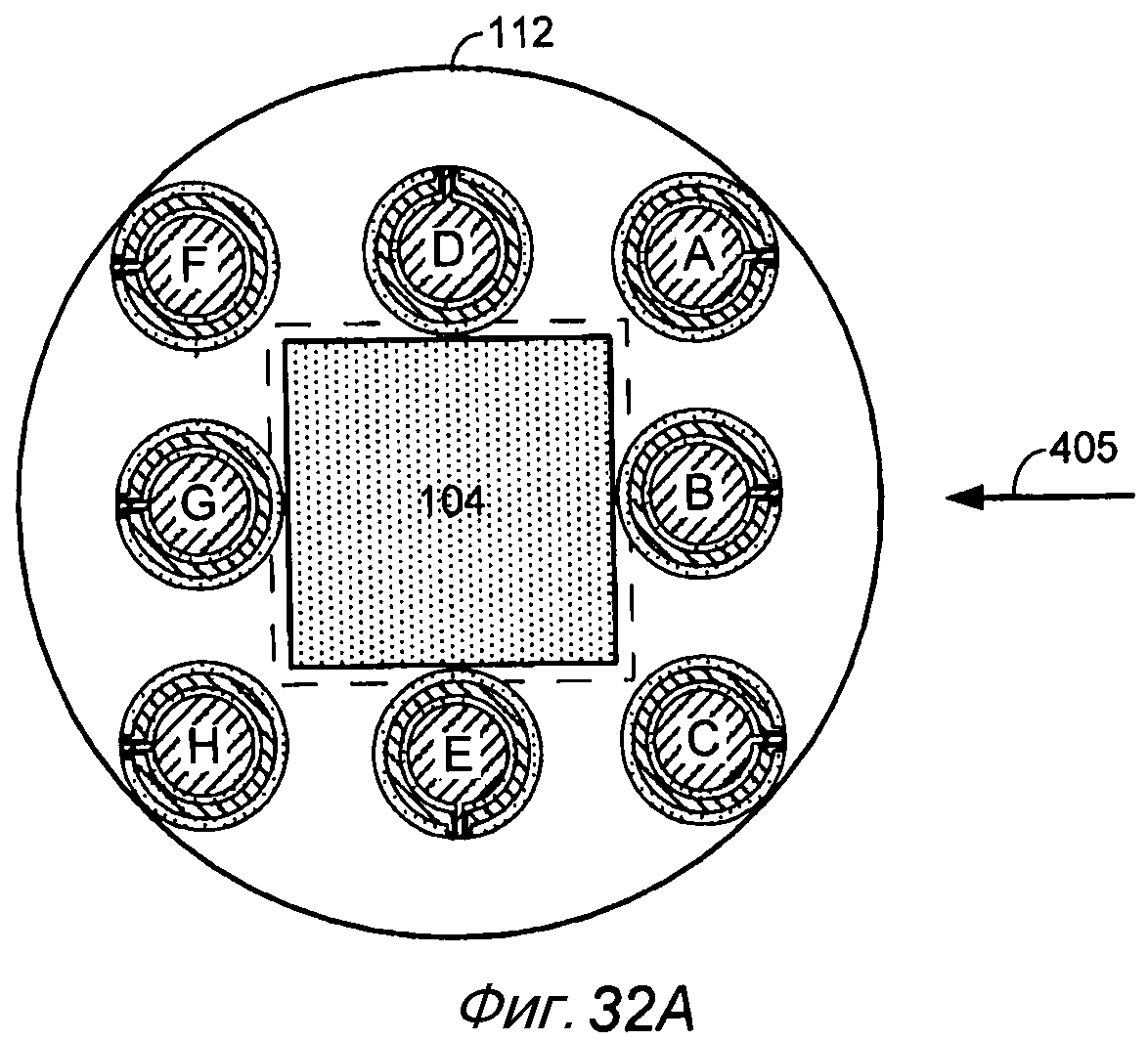
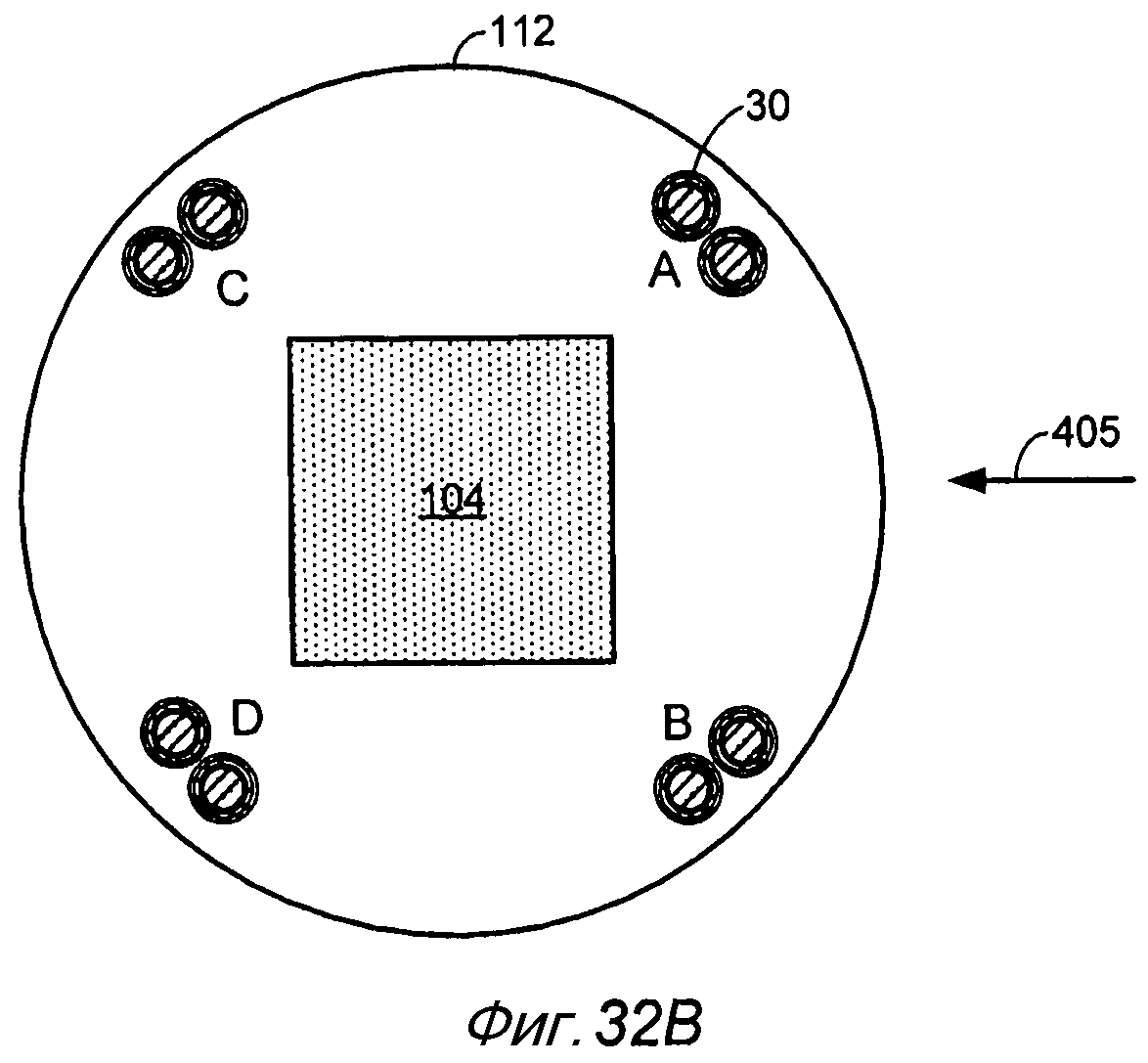
на Фиг. 32A и Фиг. 32B изображены схемы компоновки датчиков для использования с системой управления из Фиг. 31.
ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Ниже дано описание различных вариантов осуществления настоящего изобретения, приведенных просто в качестве примера, и со ссылкой на чертежи.
Теория емкостных датчиков
В емкостном датчике используют однородное электрическое поле, созданное между двумя проводящими поверхностями. На коротких расстояниях приложенное напряжение является пропорциональным расстоянию между поверхностями. Датчики с одной пластины измеряют расстояние между одной пластиной датчика и электропроводящей поверхностью мишени.
На Фиг. 2 показана схема расположения электродов в виде параллельных пластин. Емкость между двумя электродами 11, 12 задана зарядом, индуцированным на одном из электродов вследствие разности потенциалов между этими двумя электродами, деленным на разность потенциалов, как представлено в уравнении (1)


Два параллельных электрода разнесены на расстояние


где





Когда для зарядки конденсатора с параллельными пластинами используют источник 13 переменного электрического тока, то между электродами создается потенциал напряжения, зависящий от импеданса электродов. Импеданс конденсатора с параллельными пластинами задается уравнением (3),

где



Из уравнения (3) можно увидеть, что емкостный импеданс является обратно пропорциональным величине емкости и частоте сигнала, подаваемого на конденсатор. В случае емкостного датчика измеряют изменение электрического параметра (напряжения или тока), которое соответствует изменению импеданса датчика. Когда частота сигнала, подаваемого на датчик, сохраняется постоянной, то может быть сделано, что импеданс является обратно пропорциональным изменению емкости. Уравнение (2) показывает, что емкость является прямо пропорциональной площади зоны перекрытия электродов датчика и обратно пропорциональной изменению расстояния между электродами. Объединение уравнений (2) и (3) дает следующее уравнение:

где

За счет сохранения площади зоны перекрытия электродов и частоты электрического сигнала (тока), подаваемого на датчик, постоянными изменение расстояния между электродами приводит к изменению импеданса емкостного датчика. Напряжение на датчике будет пропорциональным импедансу и пропорциональным расстоянию (

Принцип измерения для емкостного датчика
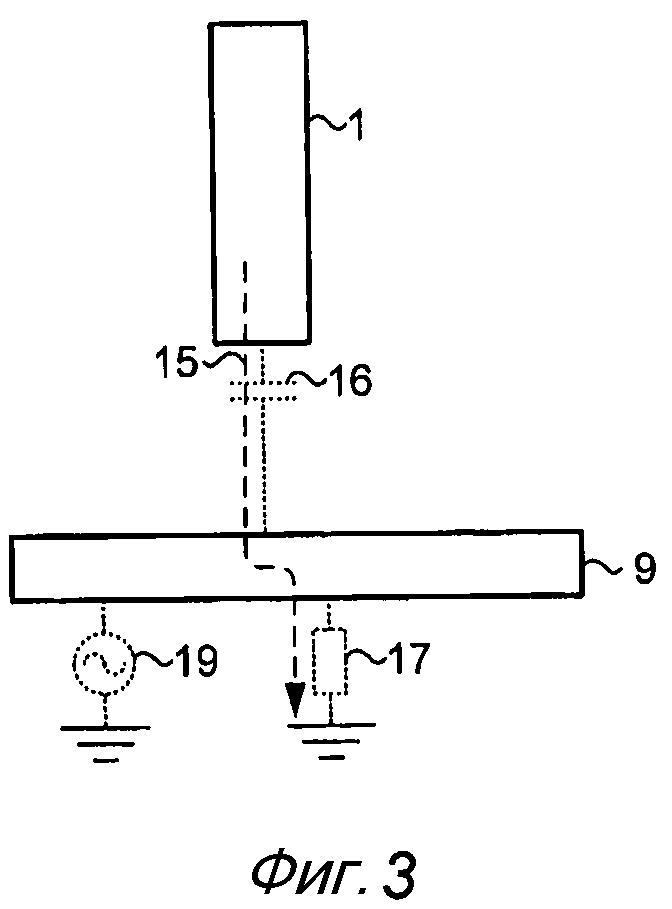
На Фиг. 3 показан один емкостный датчик-зонд 1, измеряющий зазор до заземленной проводящей мишени 9. Когда на него подают переменный ток, то ток течет по пути 15 от датчика до мишени через емкость 16 "датчик-мишень", и от мишени на землю через импеданс 17 "мишень-земля". Возмущения от внешних воздействий или изменений, которые влияют на измерение расстояния, представлены в схеме как напряжение 19. Точность измерения расстояния от датчика до мишени зависит от того, насколько точно датчик может измерять емкость 16 "датчик-мишень". Емкость импеданса 17 "мишень-земля" часто значительно превышает емкость 16 "датчик-мишень" и может превышать ее более чем в 100 раз, когда мишень не является хорошо заземленной. Эта высокая емкость приводит к низкому импедансу 17, поэтому ее влияние на датчик мало. Однако изменения импеданса 17 влияют на измерение расстояния, и это влияние желательно минимизировать.
На Фиг. 4 показана компоновка двух емкостных датчиков-зондов 1a и 1b для дифференциального измерения зазора до мишени 9. На датчики подают переменный ток со сдвигом по фазе на 180 градусов, чтобы ток протекал по пути 18 из одного датчика до мишени через емкость 16a "датчик-мишень", и от мишени к другому датчику через другую емкость 16b "датчик-мишень". Эта компоновка для возбуждения двух датчиков сигналами, сдвинутыми по фазе, является эффективной для предотвращения протекания тока через мишень на землю и минимизирует влияние мишени на импеданс 17 заземления. Она также полезна для незаземленной мишени, поскольку обеспечивает возможность протекания тока из одного датчика в другой без необходимости наличия заземленного обратного пути. Эта компоновка с возбуждением датчиков сигналами, сдвинутыми по фазе, может использоваться в обычной системе измерений, в которой получают отдельные и независимые результаты измерения емкости (и расстояния) от каждого датчика из пары датчиков. Каждый датчик измеряет расстояние до мишени индивидуально. Возмущение 19 представлено на Фиг. 4 двумя напряжениями 19a и 19b возмущения, причем каждая половина величины напряжения 19 относится к синфазному возмущению, которое оказывает одинаковое влияние на каждый датчик.
Компоновка для дифференциальных измерений также может использоваться совместно с сигналами, сдвинутыми по фазе, которые подают на датчики. В этой компоновке выходные сигналы с двух датчиков объединяют в пару таким образом, что емкость 16a "датчик-мишень" датчика 1a заряжается напряжением возбуждения датчика 1a в течение его положительного полупериода, а также напряжением возбуждения датчика 1b в течение его положительного полупериода, тогда как емкость 16b "датчик-мишень" датчика 1b заряжается напряжением возбуждения датчика 1b в течение его отрицательного полупериода, а также напряжением возбуждения датчика 1a в течение его отрицательного полупериода. Таким образом, выходной сигнал с каждого датчика соответствует среднему расстоянию между этими двумя датчиками и мишенью.
Питание датчиков осуществляют сигналом напряжения треугольной формы с постоянным наклоном и амплитудой, что приводит к приблизительно прямоугольной форме сигнала электрического тока, подаваемого на емкость датчика, то есть к приблизительно постоянному положительному электрическому току в одном полупериоде и к приблизительно постоянному отрицательному электрическому току в другом полупериоде. Практически ток увеличивается до, по существу, стационарного состояния в течение каждого полупериода, вследствие чего измерения предпочтительно производят в течение последней части каждого полупериода, когда достигнут стационарный электрический ток.
Ток, протекающий через датчик, и соответствующая емкость датчика могут быть измерены и преобразованы в напряжение для дальнейшей обработки. Результирующие значения для каждого датчика из дифференциальной пары могут быть объединены для уменьшения или устранения синфазных возмущений. Например, стационарный ток, протекающий через датчик 1a в течение положительного периода электрического тока, может быть просуммирован со стационарным током, протекающим через датчик 1b в течение положительного периода электрического тока, и аналогичным образом стационарный ток, протекающий через датчик 1a в течение отрицательного периода электрического тока, может быть просуммирован со стационарным током, протекающим через датчик 1b в течение отрицательного периода электрического тока. Вычитание просуммированного значения в положительном периоде из просуммированного значения в отрицательном периоде дает сигнал дифференциального датчика, то есть Vdiff = (V1pos + V2pos) - (V1neg+V2neg).
Вследствие того что датчики расположены в непосредственной близости и того что возбуждение пары датчиков осуществляют со сдвигом по фазе, ток датчика заряжает и разряжает обе емкости 16a и 16b "датчик-мишень" пары датчиков так, что каждое измеренное значение равно среднему значению расстояния от каждого датчика до мишени. Оно может рассматриваться как расстояние между парой датчиков и точкой на мишени посередине между этими двумя датчиками. На каждое измеренное значение оказывают влияние любые возмущения, например возмущения 19a и 19b, которые показаны на Фиг. 4. Эти возмущения присутствуют как в значениях в положительных периодах, так и в значениях в отрицательных периодах, но, по существу, удалены из результатов измерений путем вычитания положительных и отрицательных величин при получении сигнала дифференциального датчика. Преимущество этой компоновки состоит в том, что синфазные возмущения в отдельных датчиках взаимно компенсируются при измерениях. Любые различия в двух датчиках, которые остаются постоянными во время измерений, будут взаимно скомпенсированными, что приводит к точному результату измерения. Компоновка для дифференциальных измерений сильно ослабляет влияние емкости мишени относительно земли и увеличивает чувствительность измерительной системы.
Конструкция датчиков
На Фиг. 5 на виде в разрезе показан емкостный датчик, содержащий тонкопленочную структуру. Проводящий измерительный электрод 31 и проводящий боковой охранный электрод 32 сформированы на изолирующей пленке 34 или прикреплены к ней. Проводящий задний охранный электрод 35 расположен на задней стороне изолирующей пленки 34. Зазор 39 между измерительным электродом и охранным электродом является узким, обычно равным нескольким десятым долям микрометра, и может представлять собой воздушный зазор или зазор, заполненный изоляционным материалом.
Электрическое поле, сгенерированное между измерительным электродом и мишенью, искривляется вблизи краев измерительного электрода. Наличие проводника вблизи края измерительного электрода может оказывать большое и непредсказуемое влияние на электрическое поле и, следовательно, на результаты измерений посредством датчика. Чтобы избежать этой ситуации (и сделать результаты измерений посредством датчика более прогнозируемыми и более простыми для моделирования, чтобы электрическое поле можно было вычислить аналитически), измерительный электрод окружен охранным электродом, на который подают тот же самый потенциал, что и на измерительный электрод. Охранный электрод функционирует в качестве экрана против внешних помех и также выводит эффекты искривления электрического поля из измерительной области под измерительным электродом, уменьшая паразитную емкость. Электрическое поле генерируют между охранным электродом и мишенью на каждой стороне электрического поля между измерительным электродом и мишенью. Между измерительным электродом и охранным электродом сгенерированное электрическое поле отсутствует, поскольку они имеют одинаковый потенциал. Это приводит, по существу, к однородному электрическому полю в области под измерительным электродом, тогда как на внешних краях охранных электродов происходит искривление поля.
Площадь измерительного электрода 31 должна быть большой по сравнению с расстоянием, отделяющим измерительный электрод от мишени. К тому же, зазор 39 между измерительным электродом 31 и боковым охранным электродом 32 должен быть малым по сравнению с расстоянием между измерительным электродом и мишенью, а ширина бокового охранного электрода 32 должна быть большой по сравнению с расстоянием между измерительным электродом и мишенью. В одном из вариантов осуществления изобретения ширина измерительного электрода является по меньшей мере в пять раз большей, чем расстояние между электродом датчика и мишенью, зазор между измерительным электродом и охранным электродом является меньшим или равным одной пятой расстояния между электродом датчика и мишенью, а ширина охранного электрода является по меньшей мере в пять раз большей, чем расстояние между измерительным электродом и мишенью. Соблюдение эти сравнительных конструктивных правил обеспечивает вариант осуществления конструктивных правил для емкостного датчика с очень предсказуемой емкостью, например, предсказуемость емкости равна одной миллионной. Предсказуемость здесь определяется как относительная погрешность при использовании формулы идеальной емкости пластины в зависимости от расстояния согласно приведенному уравнению (2) для вычисления емкости для электрода конечного размера вместо электрода бесконечного размера.
Помимо измеряемой емкости C1 датчика между измерительным электродом и мишенью датчик имеет собственные паразитные емкости C2 и C3 между каждым из отдельных элементов конструкции. Паразитные емкости C2 и C3 являются малыми по сравнению с измеряемой емкостью C1. В варианте осуществления изобретения, показанном на Фиг. 5, паразитные емкости включают в себя емкость C2 между измерительным электродом и боковыми охранными электродами и емкость C3 между измерительным электродом и задним охранным электродом.
В одном варианте осуществления датчика емкость C1 между измерительным электродом и мишенью составляет от 0,1 пФ до 1 пФ, тогда как паразитная емкость C2 между измерительным электродом и боковыми охранными электродами является в 100-1000 раз меньшей, обычно порядка 0,001 пФ (то есть 10-15 Ф). Паразитная емкость C3 между измерительным электродом и задним электродом обычно является большей и преобладающей, обычно она равна приблизительно от 1 пФ до 1000 пФ (то есть от 10-12 Ф до 10-9 Ф). Влияние этих паразитных емкостей уменьшено за счет подачи на охранный электрод того же самого потенциала, что и на измерительный электрод. Это может быть достигнуто путем электрического соединения бокового охранного электрода и измерительного электрода или за счет использования помощи активной защиты, которая более подробно описана ниже. Активная защита также может использоваться для заднего охранного электрода.
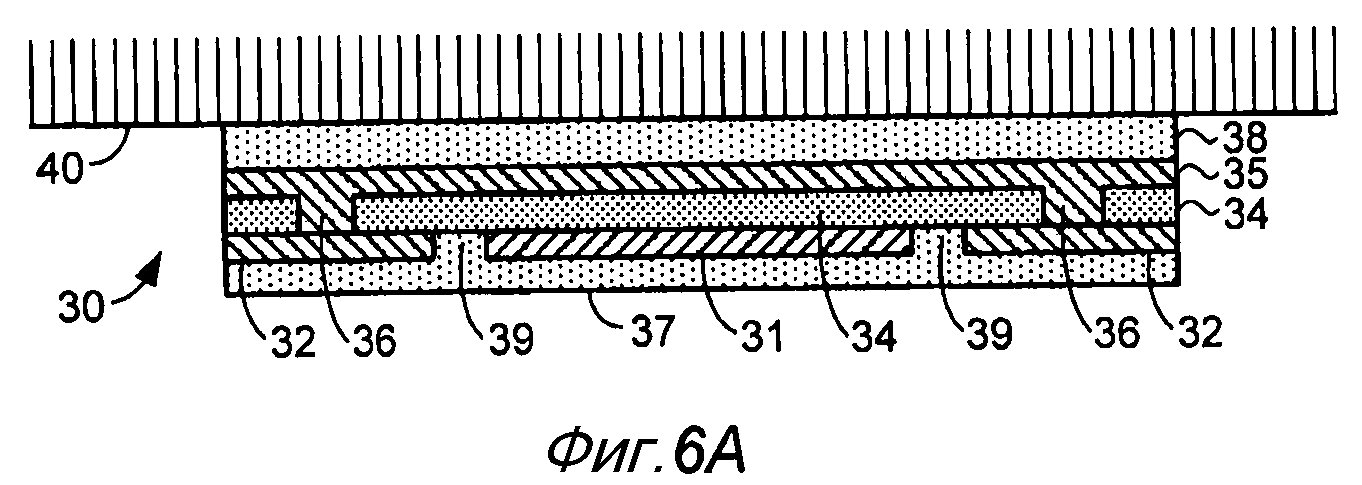
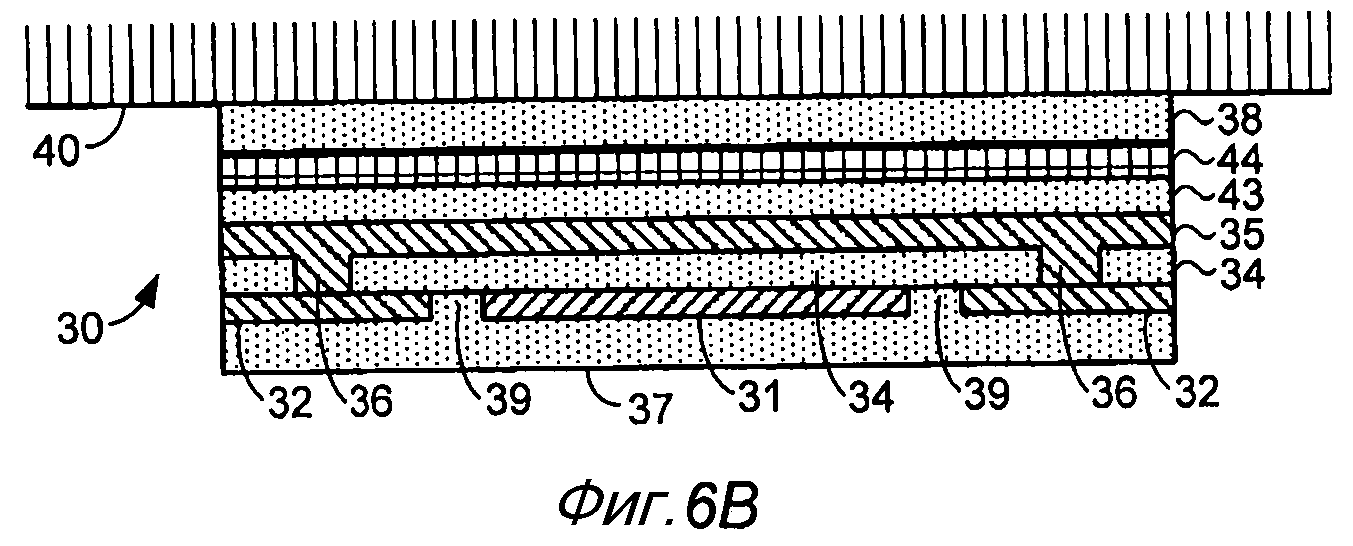
Для применения в литографических машинах, работающих в чистой производственной среде в вакуумной камере, датчики предпочтительно сконструированы так, что выделяют очень низкие уровни загрязняющих веществ, когда находятся в вакууме. Для датчиков, используемых в области применения этого типа, поверх проводников может быть сформирован защитный слой, например, из полиимидной пленки из каптона или из аналогичной защитной пленки, в особенности при использовании материалов, которые могут загрязнять вакуум. На Фиг. 6A-6D на виде в разрезе показаны различные варианты осуществления тонкопленочного датчика, включающего в себя защитные слои 37 и 38, на Фиг. 6E на виде сверху показан датчик из Фиг. 6A и Фиг. 6B, а на Фиг. 6F на виде сверху показан датчик из Фиг. 6D.
На Фиг. 6A на виде в разрезе показан вариант осуществления изобретения с измерительным электродом 31 и боковым охранным электродом 32, которые сформированы на одной поверхности изолирующей пленки 34 или прикреплены к ней, и с задним охранным электродом 35 на другой поверхности пленки 34. Датчик прикреплен к пластине 40, которая обычно является частью конструкции оборудования, в котором необходимо измерять расстояние, или может быть прикреплен к детали конструкции, например к монтажной пластине или к прокладке вокруг проекционного объектива литографической машины, где датчик измеряет расстояние между проекционным объективом и полупроводниковой пластиной под объективом. Пластина 40 может быть проводящей и, следовательно, также может служить в качестве экранирующего электрода для датчика.
На Фиг. 6B показан альтернативный вариант осуществления изобретения, содержащий проводящий экранирующий электрод 44, сформированный на второй изолирующей пленке 43, служащей в качестве части конструкции датчика, или прикрепленный к ней. Эта конструкция обеспечивает возможность установки датчика на непроводящей поверхности. Даже в том случае, если он установлен на проводящей поверхности, это обеспечивает совместимость по протяженности и функционированию экранирующего электрода. Включение экранирующего электрода 44 в качестве детали конструкции датчика также обеспечивает независимый потенциал земли, который в противном случае мог быть получен с опорной поверхности. Например, когда датчик используют в литографической системе с использованием пучка электронов, на потенциал земли из машины могут оказывать влияние электрические помехи от проекционных объективов. Это также обеспечивает возможность наличия того же самого заземления экранирующего электрода датчика, что и заземление измерительных электрических цепей и кабелей, соединяющих датчик с этими электрическими цепями.
Это может быть достигнуто путем соединения экранирующего электрода датчика с экранирующей жилой в соединительном кабеле, которая затем соединена с точкой заземления, используемой в электрических схемах измерений. Это предотвращает необходимость наличия отдельных заземлений для датчика и для измерительной электроники. Когда эта конструкция соединена трехжильным кабелем, например трехжильным коаксиальным кабелем, она также обеспечивает возможность наличия точек соединения, приспособленных для соединения, между каждым из трех проводящих слоев датчика и соответствующей жилой трехжильного коаксиального кабеля, включая экранирующий электрод, в том числе для соединения экранирующего электрода с экранирующей жилой трехжильного коаксиального кабеля для подачи независимого потенциала земли из электрической схемы на датчик.
На Фиг. 6C проиллюстрирован другой вариант осуществления изобретения, включающий в себя внешний боковой охранный электрод 33, электрически соединенный с экранирующим электродом 44. Это соединение может быть реализовано путем формирования отверстий или межслойных переходных отверстий в изолирующих слоях 34 и 43, например, лазером, для обеспечения возможности электрического соединения между участками проводящих слоев на каждом уровне.
На Фиг. 6D изображен еще один вариант осуществления изобретения без боковых охранных электродов на том же самом уровне или на той же самой поверхности, что и измерительный электрод. В предшествующих конструкциях, рассмотренных выше, боковые охранные электроды всегда считали необходимыми для ограничения электрического поля, сгенерированного измерительным электродом в пределах измерительной области для генерации относительно однородного электрического поля между измерительным электродом и мишенью и для уменьшения влияния проводников, расположенных близко к датчику, на датчик. В предшествующих конструкциях, которые были относительно высокими и большими, например, как показано на Фиг. 1A, требовался охранный электрод, который продолжался вниз до той же самой плоскости, в которой расположен электрод датчика, окружая электрод датчика. Аналогичным образом, в тонкопленочных конструкциях боковые охранные электроды считали важными для размещения охранного электрода на том же самом уровне, что и электрод датчика. Боковые охранные электроды предпочтительно являются электрически соединенными с задним охранным электродом, но эта компоновка требует создания электрического соединения между этими двумя электродами, что является затруднительным. В конструкциях, показанных на Фиг. 6A-6C, это соединение сделано сквозь изолирующий слой 34. Вследствие небольшого размера датчика и тонкости изолирующего слоя 34, точное проделывание отверстий надлежащего размера и в надлежащем месте в изолирующем слое является затруднительным. Для этого может быть использован лазер, но технологический процесс становится более сложным и дорогостоящим.
Однако было установлено, что в том случае, если пленки тонкопленочного датчика являются достаточно тонкими, боковые охранные электроды на том же самом уровне, что и измерительный электрод, не нужны. Тот же самый эффект может быть достигнут путем проектирования датчика с измерительным электродом 31 меньшего размера, чем задний охранный электрод 35, чтобы периферийная часть заднего охранного электрода выступала сбоку за его пределы и окружала измерительный электрод. В этом случае периферийная часть заднего охранного электрода действует в качестве бокового охранного электрода. Электрическое поле, исходящее из периферийной части заднего охранного электрода 35, продолжается через изолирующий слой 34, действуя так, что ограничивает электрическое поле, сгенерированное измерительным электродом, измерительной областью, вследствие чего между измерительным электродом и мишенью генерируется относительно однородное электрическое поле. Искривление электрического поля, вызванное проводником, расположенным вблизи датчика, происходит на внешних краях периферийной части заднего охранного электрода, а не в измерительном электроде. Результатом этого является более простая конструкция, которая является менее сложной в изготовлении и настолько же более дешевой в производстве, но которая может обеспечивать генерацию, по существу, однородного электрического поля в области под измерительным электродом с меньшей чувствительностью к возмущениям, вызванным проводником, расположенным близко к датчику.
Варианты осуществления изобретения, изображенные на Фиг. 6A и Фиг. 6B, показаны на виде сверху на Фиг. 6E, где измерительный электрод 31 сформирован имеющим круглую форму с C-образным боковым охранным электродом 32, почти полностью окружающим измерительный электрод, причем между этими двумя электродами остается узкий зазор вокруг периферийного края измерительного электрода 31. В этом варианте осуществления изобретения боковой охранный электрод 32 и задний электрод 35 возможно, но не обязательно, являются электрически соединенными посредством отверстия 37 в изолирующей пленке 34, обеспечивающего возможность электрического контакта между охранным и задним электродами. В этом варианте осуществления изобретения используют одно C-образное отверстие, хотя могут использоваться иные формы и/или может использоваться множество отверстий. Соединение охранного и заднего электродов приводит оба электрода к одинаковому потенциалу для устранения влияния любой емкости между ними, и влияние любой емкости между охранным и задним электродами и измерительным электродом также может быть устранено с использованием активной защиты.
В варианте осуществления изобретения, показанном на Фиг. 6E, внутренний измерительный электрод 31 имеет одно или более продолжений, образующих соединительные шины 41 для обеспечения электрического соединения измерительного электрода с внешними схемами обработки сигналов, и аналогичным образом, боковой охранный электрод 32 имеет одно или более продолжений, образующих соединительные шины 42 для обеспечения электрических соединений. Измерительный электрод 31, боковой охранный электрод 32 и соединительные шины 41 и 42 сформированы из тонких пленок. В варианте осуществления изобретения, показанном на чертеже, все электроды 31 и 32 и все соединительные шины 41 и 42 расположены в одной и той же плоскости и могут быть сформированы из одной и той же тонкой пленки путем осаждения или путем формирования частей пленки, удаляемых с использованием лазера, способом травления или иными подходящими способами удаления. Боковой охранный электрод 32, по существу, окружает измерительный электрод 31, оставляя небольшой зазор для соединительных шин 41, продолжающихся за пределами измерительного электрода, для обеспечения электрического соединения между измерительным электродом и схемами обработки сигналов. Соединительные шины также добавляют паразитные емкости, которые следует учитывать при проектировании датчика.
Вариант осуществления изобретения, изображенный на Фиг. 6D, показан на виде сверху на Фиг. 6F (изолирующий слой 34 не показан, поэтому виден задний охранный электрод 35). Этот вариант аналогичен варианту осуществления изобретения, показанному на Фиг. 6E, за исключением отсутствия боковых охранных электродов на том же самом уровне, что и измерительный электрод. На этом изображении в качестве бокового охранного электрода функционирует периферийная область 35a заднего охранного электрода 35. Датчик может быть сконструирован таким же самым образом, что и датчик из описанного выше варианта осуществления изобретения, показанного на Фиг. 6E, и, как описано выше, соединительные шины 41 и 42 продолжаются за пределы измерительного электрода и заднего охранного электрода для обеспечения электрических соединений.
В этих вариантах осуществления изобретения электроды 31 и 35, и электроды 32 и 44, когда они включены в состав конструкции, могут быть сформированы из проводящих слоев толщиной приблизительно 18 микрон, изолирующие пленки 34 и 43 могут иметь толщину приблизительно 25 микрон, а защитные слои 37, 38 могут иметь толщину приблизительно 50 микрон. Тонкопленочный датчик может быть сконструирован имеющим общую толщину приблизительно 100-200 микрон и толщину между задней поверхностью конструкции датчика и передней поверхностью измерительного электрода (то есть поверхностью, обращенной в направлении, в котором производят измерение расстояния) равную 50-150 микронам, предпочтительно около 100 микрон. Тонкопленочная структура, небольшая площадь и очень малая высота (толщина) датчика позволяют применять эти датчики в тех областях применения, где имеется лишь очень небольшое пространство (в частности, где имеющаяся высота ограничена) и где необходимо близкое расстояние между датчиками или между датчиками и другим оборудованием.
Небольшой размер тонкопленочного датчика, показанного на Фиг. 6A-6F (и также показанного в других вариантах осуществления изобретения, которые описаны ниже), обеспечивает много преимуществ. Тонкопленочная структура приводит к минимальной высоте, и ширина или площадь датчика также могут быть очень малыми. Это обеспечивает возможность установки датчика в непосредственной близости к той точке, в которой желательно производить измерение расстояния. При использовании датчиков в литографической машине для измерения расстояния между проекционным объективом и экспонируемой мишенью они могут быть установлены рядом с проекционным объективом и на той же самой монтажной конструкции так, чтобы как датчики, так и проекционный объектив были зафиксированы в одной и той же опорной точке. Это сильно уменьшает погрешности из-за относительного перемещения между датчиками и проекционным объективом, устраняет необходимость внесения поправок на отклонение места установки датчика от номинального и снижает требования для калибровки. Небольшой размер датчика также снижает требования к плоскостности для самого датчика.
На Фиг. 7 и Фиг. 8 показаны дополнительные варианты осуществления тонкопленочного датчика с изолирующим слоем 34, сформированным только лишь между измерительным электродом 31 и задним электродом 35, чтобы боковой охранный электрод 32 и задний электрод 35 могли быть непосредственно соединены друг с другом.
На Фиг. 7A показан датчик с квадратным измерительным электродом на виде сверху, а на Фиг. 7B этот датчик показан на виде в разрезе. В одном из вариантов осуществления изобретения квадратный датчик спроектирован с номинальной емкостью датчика (емкостью C1 между измерительным электродом и мишенью) равной 1 пФ при номинальном расстоянии между датчиком и мишенью равном 100 микрон, измерительный электрод имеет ширину 3,5 мм (+/-0,01 мм) и площадь 12,25 мм2. Охранный электрод имеет ширину 1,5 мм (+/-0,01 мм) и зазор между измерительным и охранным электродами составляет 0,015 мм (+/-0,001 мм). В другом варианте осуществления изобретения датчик спроектирован с номинальной емкостью датчика равной 10 пФ при номинальном расстоянии между датчиком и мишенью равном 100 микрон. Измерительный электрод имеет ширину 11 мм (+/-0,01 мм) и площадь 121 мм2. Ширина охранного электрода и зазор не изменены и равны соответственно 1,5 мм (+/-0,01 мм) и 0,015 мм (+/-0,001 мм).
На Фиг. 8A показан датчик с круглым измерительным электродом на виде сверху, а на Фиг. 8B этот датчик показан на виде в разрезе. В одном из вариантов осуществления изобретения круглый датчик спроектирован с номинальной емкостью датчика равной 1 пФ при номинальном расстоянии между датчиком и мишенью равном 100 микрон. Измерительный электрод имеет диаметр 4 мм (+/-0,001 мм) и площадь 12,25 мм2. Охранный электрод имеет внутренний диаметр 4,015 мм (+/-0,001 мм) и внешний диаметр 8 мм (+/-0,001 мм). В другом варианте осуществления изобретения датчик спроектирован с номинальной емкостью датчика равной 10 пФ при номинальном расстоянии между датчиком и мишенью равном 100 микрон. Измерительный электрод имеет диаметр 6,2 мм (+/-0,001 мм) и площадь 121 мм2. Охранный электрод имеет внутренний диаметр 6,215 мм (+/-0,001 мм) и внешний диаметр 12,4 мм (+/-0,001 мм).
Варианты осуществления изобретения, показанные на Фиг. 5-8, могут быть сконструированы так, чтобы они имели диапазон измерений (по оси z, перпендикулярной к поверхности измерительного электрода) 80-180 микрон между датчиком и мишенью. Для специалиста в данной области техники понятно, что размеры датчиков могут быть изменены для обеспечения иного диапазона измерений.
Варианты осуществления изобретения, показанные на Фиг. 5-8, также могут быть реализованы с использованием способов литографии для создания еще более тонких слоев материала, например измерительного электрода 31 толщиной 100 нм (+/-10 нм), бокового охранного электрода 32 (если он содержится), заднего электрода 35 толщиной 150 нм (+/-10 нм) и изолирующего слоя 34 толщиной 50 нм (+/-10 нм). В этих вариантах осуществления изобретения измерительный электрод является квадратным или круглым, обеспечивая большую измерительную область для максимального увеличения чувствительности датчика, одновременно обеспечивая минимизацию габаритных размеров датчика. Однако датчик может быть выполнен имеющим иную форму с измерительным электродом (и аналогичным образом, с охранными электродами), выполненным в форме прямоугольника, овала или имеющим иную форму для максимального увеличения измерительной области.
Варианты осуществления изобретения, показанные на Фиг. 5-8, могут быть сконструированы с проводящим слоем для электродов 31, 32, осажденным на изолирующий слой 35 или прикрепленным к изолирующему слою клеевым или связывающим слоем. Зазор 39 между измерительным и охранным электродами может быть сформирован путем формирования одного проводящего слоя для обоих электродов: для измерительного электрода и для охранного электрода, и путем удаления материала с использованием лазера или способом травления для создания зазора. Лазер является предпочтительным для создания зазора с очень малыми значениями ширины, и может быть использован для создания зазора шириной 25 микрон с малым отклонением, тогда как травление обычно обеспечивает меньшую точность.
Датчики могут быть изготовлены с использованием различных способов, например с использованием литографических способов, технологии MEMS (микроэлектромеханических систем), или технологии гибких печатных плат. При использовании технологии гибких печатных плат изолирующий слой 34 может быть создан в виде гибкого листа или ленты из подходящего материала, например из полиимидной пленки из каптона или из аналогичной гибкой изолирующей пленки. Проводящие электроды 31, 32 и 35 могут быть сформированы из тонкого слоя меди или иного подходящего проводящего материала, прикрепленного к изолирующему слою 34 с использованием клея, сформированы в виде слоистого материала без приклеивания, например с использованием способа прямой металлизации, или напечатаны на изолирующем слое с использованием проводящих чернил или иными подходящими способами печати. Защитные изолирующие пленки 37 и 38 могут быть сформированы из материалов тех же самых типов, что и слой 34.
Гибкий печатный тонкопленочный датчик легко изготовить, и он может быть сделан быстро, что приводит к короткому общему времени производственного цикла. Датчик может быть сделан с надежными соединениями датчика со схемой обработки сигналов. Небольшой размер обеспечивает более высокую гибкость для его размещения в той точке, где необходимо измерять расстояние, или очень близко к ней. Датчики могут быть приклеены на месте как отдельные датчики-элементы для быстрой и простой сборки измерительной системы. Плоскостность и наклон отдельных датчиков могут быть проверены после того, как они были приклеены на месте, и откалиброваны в процедуре измерения. Когда для слоев изоляции используют гибкий лист материала, то весь датчик может быть сконструирован гибким.
Ширина зазора между измерительным и боковым охранным электродами в некоторых из вышеописанных вариантов осуществления изобретения не удовлетворяет описанным выше сравнительным конструктивным правилам, например зазор между измерительным и охранным электродами превышает одну пятую расстояния между измерительным электродом и мишенью. Однако для многих областей применения датчиков преимущества тонкопленочной структуры перевешивают это.
На Фиг. 9A-9C показаны различные варианты осуществления пары датчиков, сконструированной в виде единого интегрального блока. В этих вариантах осуществления изобретения интегральный блок включает в себя два датчика 30a и 30b, каждый из которых имеет свой собственный измерительный электрод 31a, 31b и задний охранный электрод 35a, 35b. В датчике, показанном на Фиг. 9A, в качестве экранирующего электрода используют проводящую пластину 40, и в датчиках, показанных на Фиг. 9B и Фиг. 9C, совместно используют один экранирующий электрод 44, интегрированный с парой датчиков. В варианте осуществления изобретения, показанном на Фиг. 9C, датчик прикреплен к пластине 40 с использованием капель или линий 56 клея между экранирующим электродом 44 и пластиной 40. В тех случаях, когда пластина 40 является проводящей, для электрического соединения пластины 40 и экранирующего электрода 44 может использоваться проводящий клей для более эффективного заземления экранирующего электрода. Как описано выше, два датчика 30a, 30b предпочтительно функционируют как дифференциальная пара, в которой каждый датчик возбуждают напряжением или током, который имеет сдвиг по фазе относительно другого датчика из пары, предпочтительно имеют сдвиг по фазе на 180 градусов, и производят дифференциальное измерение для взаимной компенсации синфазных погрешностей.
На Фиг. 9D на виде сверху показана дифференциальная пара датчиков. Задний охранный и измерительный электроды сформированы в форме четырехугольника со скругленными углами, рассчитанную так, чтобы она соответствовала, например, областям 115, показанным на Фиг. 20D и Фиг. 21B. Эта форма приводит к наибольшей площади измерительных электродов в пределах границ области 115 для обеспечения результатов измерений с наивысшей разрешающей способностью. Электроды также могут быть сформированы имеющими круглую форму, которая также близко соответствует областям 115 для создания измерительных электродов наибольшей площади.
На Фиг. 10A-10D показаны различные конфигурации тонкопленочного емкостного датчика с использованием различных материалов для подложки датчика. Эти варианты осуществления изобретения пригодны для конструкции с использованием литографических способов, которые позволяют изготавливать электроды очень точной формы с очень малыми размерами зазора. Это обеспечивает возможность конструирования датчика, удовлетворяющего описанным выше сравнительным конструктивным правилам и имеющего очень высокую разрешающую способность для измерения очень малых элементов и очень малых расстояний. Литографические способы также обеспечивают возможность изготовления соединительных шин и контактных/связывающих площадок с очень малыми значениями ширины дорожки и точными размерами. Кроме того, литографические способы являются хорошо известными для специалистов в данной области техники, и после того как разработана последовательность технологических операций, она может быть легко применена при изготовлении датчиков, имеющих более высокую разрешающую способность. Однако первоначальная разработка технологического процесса приводит к более длительному общему времени производственного цикла и требует экспериментов с коротким циклом для проверки различных этапов технологического процесса. На Фиг. 10A-10D показана только конфигурация слоев и не показан боковой охранный электрод, но если он содержится, то он был бы сформирован в том же самом слое, что и измерительный электрод, и на них не показано необязательное соединение бокового охранного электрода и заднего охранного электрода.
Для тех областей применения, где на машине, например на литографической машине, установлен один или более датчиков, подложка в этих вариантах осуществления изобретения может быть общей для более чем одного датчика, так что набор датчиков сконструирован в одном блоке. Пример компоновки этого типа показан на Фиг. 13A-13D и описан ниже. В этом случае подложка соединена с монтажной пластиной, или подложка может быть использована в качестве монтажной пластины для установки датчиков на машине.
Вариант осуществления изобретения, показанный на Фиг. 10A, содержит кремниевую подложку 45 с изолирующими слоями 47a, 47b, сформированными с обеих сторон. Измерительный электрод 31 сформирован на поверхности одного из изолирующих слоев, а задний охранный электрод 35 сформирован на поверхности другого изолирующего слоя. В этом варианте осуществления изобретения может потребоваться эффективное функционирование активного смещения охранного электрода, для чего может потребоваться формирование рисунка на пластине, на которой закреплен датчик. Кроме того, проблему может вызвать емкостная связь между проекционным объективом и датчиками.
Вариант осуществления изобретения, показанный на Фиг. 10B, содержит кремниевую подложку 45 с множеством слоев, сформированных на одной стороне, которые включают в себя первый изолирующий слой 47a, измерительный электрод 31, сформированный на первом изолирующем слое, второй изолирующий слой 47b и задний охранный электрод 35, сформированный на втором изолирующем слое. В этом варианте осуществления устранена необходимость формирования рисунка на монтажной пластине, к которой прикреплен датчик, и также устранена емкостная связь между проекционным объективом и датчиками. Однако по сравнению с вариантом осуществления изобретения, показанным на Фиг. 10A, требуется наличие дополнительного изолирующего слоя.
Кремниевая подложка не является хорошим изолятором, поэтому эти варианты осуществления изобретения включают в себя изолирующие слои. Еще одним недостатком кремниевой подложки является то, что вследствие наличия в кремнии примесей может происходить генерация паразитных токов в кремнии, и эти токи могут создавать помехи при измерении емкости посредством датчика.
Вариант осуществления изобретения, показанный на Фиг. 10C, содержит подложку 46 из пирекса с измерительным электродом 31, сформированным на одной поверхности, и с задним электродом 35, сформированным на другой поверхности. В этом варианте осуществления изобретения также требуется формирование рисунка на пластине, на которой закреплен датчик, если реализовано активное смещение охранных электродов, хотя активная защита может не использоваться, что приводит к уменьшению чувствительности и к добавлению некоторой нелинейности в датчике. Вариант осуществления изобретения с этой структурой, в котором толщина подложки равна 100 мкм, а зазор между измерительным электродом и боковым охранным электродом равен 16 мкм, когда на нее подают ток величиной 50 мкА (микроампер) с частотой 150 кГц, может создавать действующее выходное напряжение приблизительно 11,5 В на расстоянии 0,8 мкм между датчиком и мишенью и действующее выходное напряжение, приблизительно 13,5 В на расстоянии 1,8 мкм между датчиком и мишенью.
Вариант осуществления изобретения, показанный на Фиг. 10D, содержит подложку 46 из пирекса с множеством слоев, сформированных на одной стороне, которые включают в себя охранный электрод 49, изолирующий слой 47, сформированный на охранном электроде, и измерительный электрод 48, сформированный на изолирующем слое. При этой компоновке не требуется формирование рисунка на пластине, на которой закреплен датчик, и емкостная связь между проекционным объективом и датчиками уменьшена вследствие наличия слоя из пирекса толщиной 100 мкм. Пирекс является хорошим изолятором, и для вариантов осуществления изобретения, в которых используют подложку из пирекса, изолирующие слои, используемые в вариантах осуществления изобретения, в которых использован кремний, могут быть опущены.
Создание электрических соединений между электродами датчика (измерительным, боковым охранным и задним охранным электродами) и системой обработки сигналов требует создания надежного низкоимпедансного соединения с малыми датчиками-элементами. Это соединение должно быть способным выдерживать ожидаемые механические усилия, предотвращая внесение дополнительных паразитных емкостей в компоновку датчика. Для применений датчика в литографических машинах в этих соединениях также следует избегать использования таких материалов, которые выделяют загрязняющие вещества в вакуум.
На Фиг. 11 показан датчик, имеющий контактные площадки 50a, 50b, сформированные на концах соединительных шин 41 и 42, для обеспечения внешних соединений датчика со схемой обработки сигналов. На Фиг. 12A и Фиг. 12B на виде в разрезе показана структура контактных площадок для создания электрического контакта с электродами датчика. Они являются особо подходящими для тех вариантов осуществления изобретения, в которых используют подложки из кремния, пирекса и аналогичных материалов. В этих вариантах осуществления изобретения предусмотрено наличие контактной площадки на задней стороне подложки для электрического соединения с электродами датчика на передней стороне подложки. На Фиг. 12A показан вариант осуществления изобретения с межслойным переходным отверстием, проходящим через подложку 55. Проводящая контактная площадка 50 сформирована на задней стороне кремниевой подложки, и сформировано токопроводящее соединение 51, проходящее через межслойное переходное отверстие, для соединения с проводящим слоем 52 на передней стороне подложки. На Фиг. 12B показан вариант осуществления изобретения с электрическим соединением, сделанным через край подложки 55. Проводящая контактная площадка 50 сформирована на задней стороне подложки, и токопроводящее соединение 51 сформировано на краю подложки для соединения с проводящим слоем 52 на передней стороне подложки.
Для вариантов осуществления изобретения, в которых используют кремниевую или иную недиэлектрическую подложку, изолирующий слой 53 отделяет проводящий слой 52 от подложки и небольшой изолирующий слой 54 отделяет контактную площадку 50 от подложки. На Фиг. 12A межслойное переходное отверстие также покрыто изолирующим слоем, а на Фиг. 12B изолирующим слоем покрыт край подложки под токопроводящим соединением 51. Дополнительный изолирующий слой, необходимый для контактной площадки, вызывает появление дополнительной небольшой паразитной емкости. Для вариантов осуществления изобретения, в которых используют диэлектрическую подложку, например, из пирекса, дополнительные изолирующие слои являются необязательными и дополнительные паразитные емкости уменьшены.
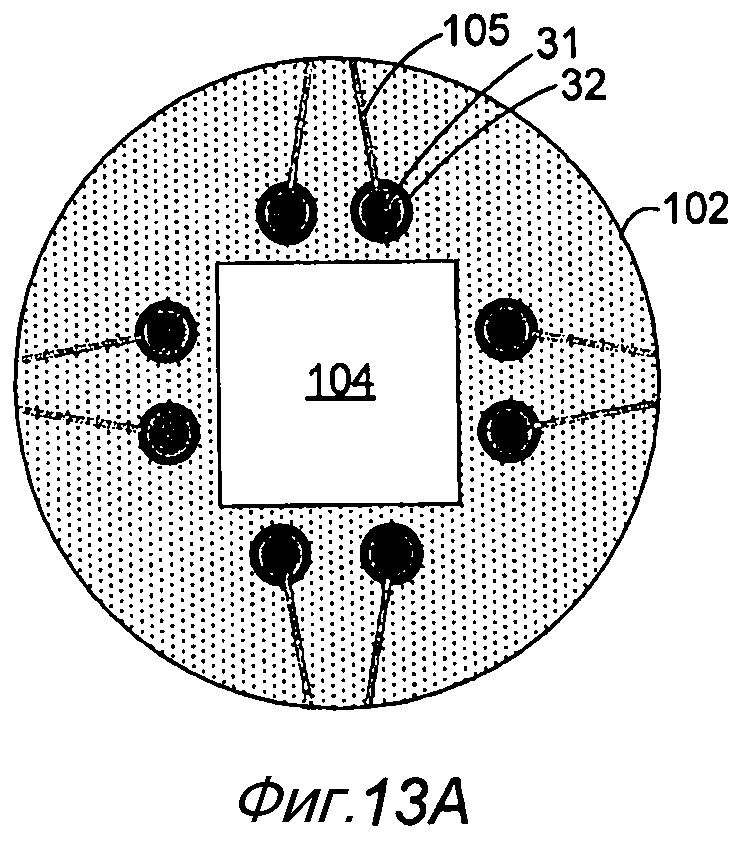
На Фиг. 13A-13D показан вариант осуществления измерительной системы с множеством датчиков, построенной на одной подложке 102, которая расположена вокруг проекционного объектива 104 литографической машины. На Фиг. 13A показана передняя сторона подложки, то есть сторона, обращенная вниз и к полупроводниковой пластине, подлежащей экспонированию. На подложке сформированы восемь датчиков (содержащие четыре пары датчиков), которые расположены попарно вокруг проекционного объектива. В этом варианте осуществления изобретения проводящий измерительный электрод 31 сформирован на передней стороне подложки для каждого датчика. Боковой охранный электрод 32 расположен вокруг каждого измерительного электрода, а между ними сформирован небольшой зазор. Соединительные шины 105 обеспечивают электрические соединения между каждым из измерительных и охранных электродов и краем подложки. В этом варианте осуществления изобретения подложка выполнена из диэлектрика, например из пирекса или каптона, и какой-либо дополнительный изолирующий слой между электродами и подложкой не используется. Также может быть сформирован тонкий защитный изолирующий слой поверх электродов датчика на передней стороне подложки.
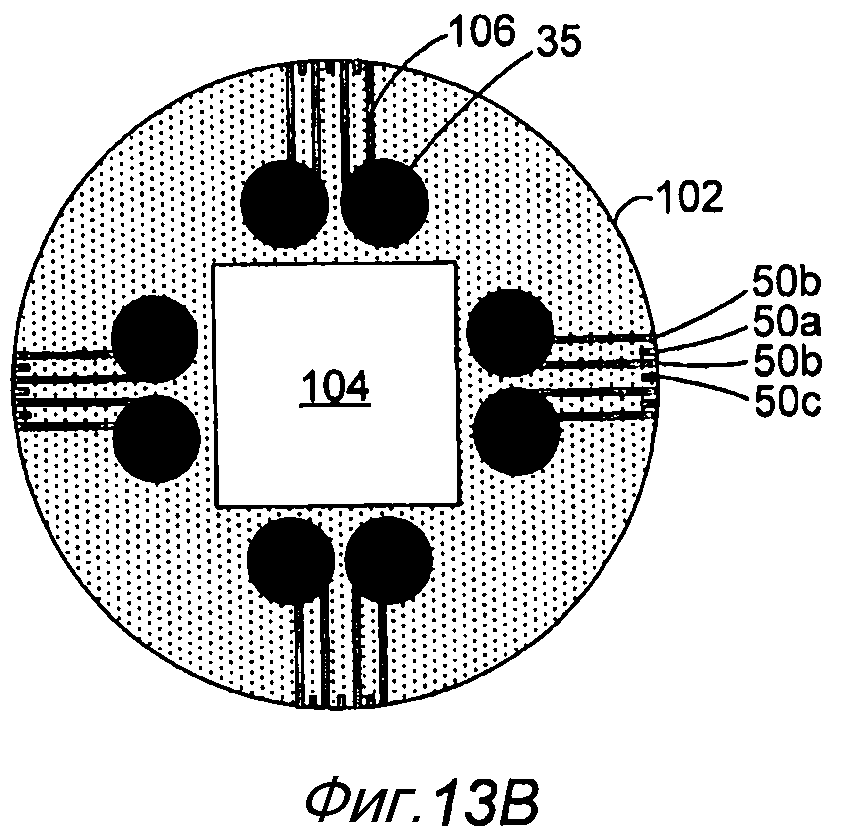
На Фиг. 13B показана задняя сторона подложки, то есть сторона, обращенная вверх от полупроводниковой пластины, подлежащей экспонированию. На задней стороне подложки сформирован проводящий задний охранный электрод 35 для каждого датчика. Для каждого датчика задний электрод является соосным с измерительным и боковым охранным электродами на передней стороне подложки. В этом варианте осуществления изобретения с круглыми электродами центры всех электродов расположены на одной оси для каждого датчика. Задний электрод 35 имеет больший диаметр, чем измерительный электрод 31, и его диаметр может быть равным или большим, чем диаметр бокового охранного электрода 32 на передней стороне. Соединительные шины 106 обеспечивают электрические соединения между задними охранными электродами и краем подложки.
Соединительные шины 105 на передней стороне и 106 на задней стороне подложки могут быть расположены так, что образуют контактные площадки 50a и 50b на задней стороне подложки на ее краю, например, с использованием конструкции, показанной на Фиг. 11, Фиг. 12A или Фиг. 12B, где контактные площадки 50a электрически соединены с измерительными электродами 31, а контактные площадки 50b соединены с боковыми охранными электродами 32 и задними охранными электродами 35. В этом варианте осуществления изобретения области контактных площадок чередуются, причем на любой стороне каждая контактная площадка 50a от измерительного электрода имеет контактную площадку 50b от соответствующего бокового охранного электрода и заднего охранного электрода. На краю подложки также сформирована дополнительная контактная площадка 50c для соединения с экранирующим электродом, который может быть соединен с экраном кабеля, соединяющего датчики с измерительной системой. Области контактных площадок вместе образуют контактные площадки 50, расположенные в отдельных областях, соответствующих схеме расположения пары датчиков на подложке.
На Фиг. 13C показана задняя сторона подложки с изолирующим слоем 110, сформированным поверх подложки, причем вокруг края подложки оставлен зазор, чтобы контактные площадки 50 были открытыми для создания соединений. На Фиг. 13D показана подложка 102, установленная на прокладке/монтажной пластине 112. Монтажная пластина 112 может быть проводящей, может функционировать в качестве экранирующего электрода и может быть заземленной, или в альтернативном варианте проводящая экранирующая пластина, функционирующая в качестве экранирующего электрода, может быть предусмотрена как отдельный компонент. Контактная площадка 50c функционирует в качестве соединительной области для создания электрических соединений с экранирующим электродом, например для соединения с экраном датчика. Изолирующий слой 110 электрически отделяет охранные электроды от монтажной пластины/экранирующего электрода. В этом варианте осуществления изобретения монтажная пластина имеет вырезы вокруг ее края для того, чтобы контактные площадки 50 оставались открытыми для создания электрических соединений.
В одном из вариантов осуществления изобретения компоновка, показанная на Фиг. 13A-13D, может содержать подложку из пирекса диаметром 50 мм с квадратным отверстием размером, например, 19 × 19 мм или 26 × 26 мм, чтобы оно вмещало проекционный объектив. Измерительные электроды имеют диаметр 3,8 мм и зазор 16 мкм между измерительным и охранным электродами, причем охранные электроды имеют ширину 1 мм, а задние электроды имеют диаметр 6 мм. Соединительные шины 105 имеют ширину 0,05 мм и разнесение 16 мкм, и соединительные шины 106 имеют ширину 0,5 мм и разнесение 0,5 мм, а контактные площадки могут иметь ширину 0,5 мм и длину 1,4 мм, причем эти площадки отделены друг от друга зазором шириной 0,5 мм. Питание датчика может осуществляться током величиной 10 мкА с частотой 200 кГц.
Датчики в варианте осуществления изобретения, показанном на Фиг. 13A-13D, или в любой из других описанных здесь компоновок датчиков могут быть сконструированы согласно любому из описанных здесь вариантов осуществления изобретения, например, на Фиг. 6A-6F, Фиг. 7A-7B, Фиг. 8A-8B, Фиг. 9A-9C, Фиг. 10A-10D, Фиг. 11 или Фиг. 12A-12B и могут быть скомпонованы в виде дифференциальных пар, где на каждый датчик из пары подают напряжение или ток, имеющий сдвиг фазы относительно напряжения или тока, подаваемого на другой датчик из пары. Например, на первый датчик из пары может подаваться ток, который имеет сдвиг по фазе на 180 градусов относительно тока, подаваемого на другой датчик из пары. Для ослабления связи между парами датчиков, чтобы множество дифференциальных пар датчиков можно было использовать вместе, на каждую пару датчиков может подаваться напряжение или ток, который сдвиг фазы относительно напряжения или тока, подаваемого на соседнюю пару датчиков. Например, на соседние пары датчиков могут подаваться токи, которые имеют сдвиг по фазе на 90 градусов относительно друг друга. Например, на пару датчиков в верхней части чертежа Фиг. 13A могут подаваться токи с фазами 0 и 180 градусов, тогда как на каждую из пар датчиков: на пару датчиков на правой стороне чертежа и на пару датчиков на левой стороне чертежа подают токи с фазами 90 и 270 градусов, на пару датчиков в нижней части чертежа подают токи с фазами 0 и 180 градусов. Таким образом, для разделения пар и для уменьшения помех между ними используют способ разделения по фазе с ортогональным смещением соседних пар датчиков. В альтернативном варианте или в дополнение к этому для уменьшения помех между парами датчиков могут использоваться иные способы, такие как, например, частотное разделение или временное разделение.
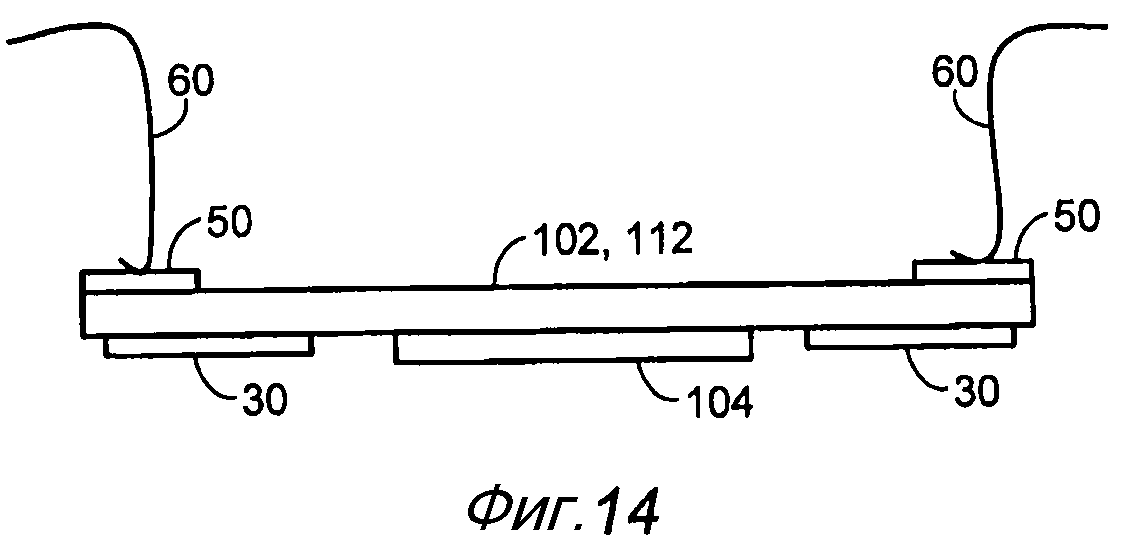
Для вывода электрических сигналов из датчика и для их передачи для преобразования исходных сигналов с датчиков в пригодный для использования формат необходимо электрическое соединение датчиков-зондов с системой обработки сигналов. На Фиг. 14 на виде сбоку показана компоновка датчика с датчиками 30, установленными на передней стороне подложки 102 вокруг проекционного объектива 104 литографической машины. Подложка 102 также может функционировать в качестве монтажной пластины 112 для установки датчиков на оборудовании, откуда производят измерения расстояния, например на проекционном объективе литографической машины. На задней стороне подложки сформированы контактные площадки 50, а электрический контакт с площадками для соединения с системой обработки сигналов обеспечивают соединительные провода 60 в виде металлических контактных пружин.
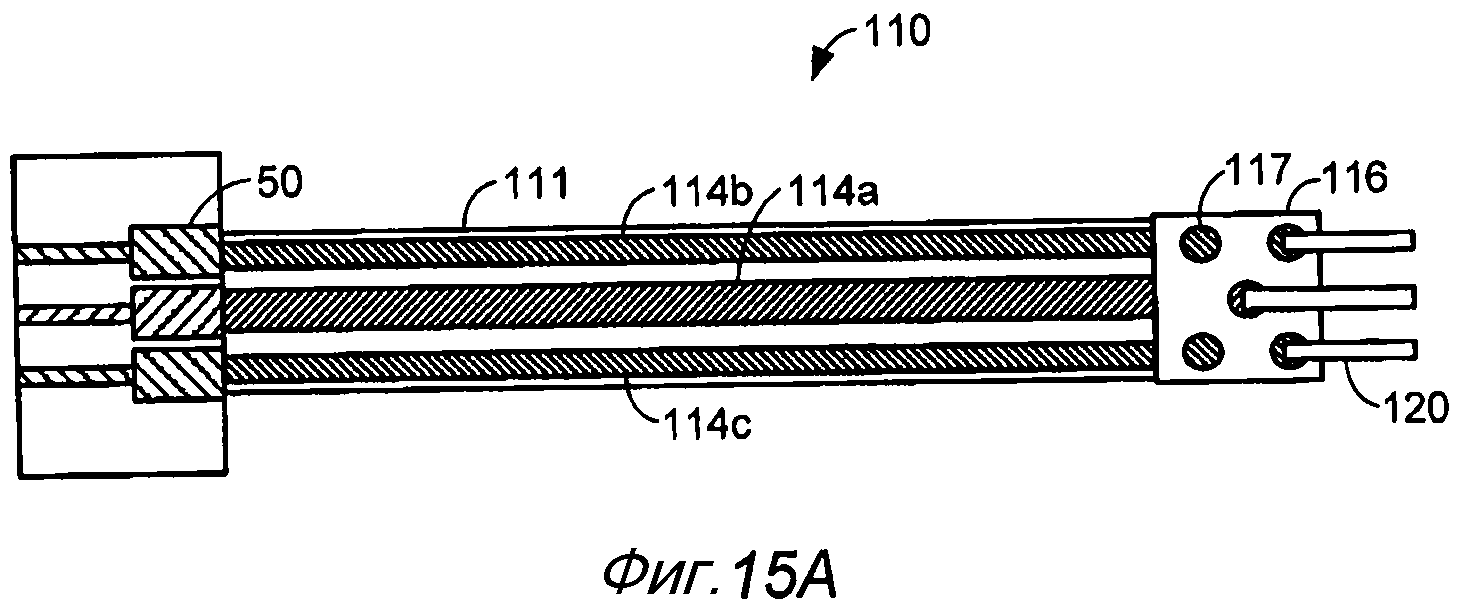
На Фиг. 15A и Фиг. 15B показан альтернативный вариант компоновки соединений, в котором используют соединительный элемент 110 в виде гибкой печатной платы, содержащий гибкую мембрану 111, на которой напечатаны или к которой прикреплены токопроводящие дорожки 114a, 114b, 114c. Поверх токопроводящих дорожек может быть сформирован защитный изолирующий слой. Один конец гибкого печатного соединителя 110 соединен с контактными площадками 50 или с соединительными областями электродов датчика, чтобы токопроводящие дорожки обеспечивали электрическое соединение с электродами датчика. В показанном варианте осуществления изобретения токопроводящая дорожка 114a соединена с контактной площадкой измерительного электрода, а токопроводящие дорожки 114b и 114c соединены с контактными площадками бокового охранного электрода и/или заднего электрода. В тех случаях, когда в состав конструкции датчика включен экранирующий электрод, на гибком печатном соединителе могут быть сформированы дополнительные токопроводящие дорожки для соединения экранирующего электрода с потенциалом земли на удалении от датчика и с конструкцией, обеспечивающей опору для датчика. к другому концу гибкого печатного соединителя 110 прикреплен штекер или разъем 116 соединителя с контактными клеммами 117 для обеспечения электрического контакта с проводами или с соединительными штырьками 120 для передачи сигналов с датчиков в систему обработки сигналов. На Фиг. 15A изображен вариант осуществления изобретения гибкого печатного соединителя 110 на виде с нижней стороны, на котором показаны токопроводящие дорожки 114a-114c, рядом с видом с верхней стороны, на котором показан набор контактных площадок 50, с которыми соединяют токопроводящие дорожки. На Фиг. 15B на виде сбоку показан гибкий печатный соединитель 110, соединенный с контактными площадками. Гибкий печатный соединитель является гибким и может использоваться в любом из описанных здесь вариантов осуществления датчика. Следует учитывать максимальный радиус изгиба гибкого печатного соединителя, в особенности, для очень малых значений ширины токопроводящей дорожки, и во время сборки важно обеспечивать совмещение гибкого печатного соединителя с контактными площадками датчика.
Когда изолирующий слой 34 выполнен из подходящего материала, например из изолирующей полимерной пленки или из аналогичного материала, гибкая мембрана 111 может быть сформирована из того же самого материала и образовывать единое целое с изолирующим слоем 34 как его продолжение. Аналогичным образом, в этом варианте осуществления изобретения токопроводящие дорожки 114a-114c могут быть сформированы из того же самого материала и образовывать единое целое с измерительным электродом 31 и боковым охранным электродом 32 и/или задним электродом 35 как продолжение этих электродов. В этой конфигурации контактные площадки между электродами и токопроводящими дорожками не являются обязательными, но контактные площадки могут использоваться на концах токопроводящих дорожек. В другом варианте осуществления изобретения токопроводящие дорожки могут быть распределенными по слоям таким же самым образом, как и электроды датчика, например токопроводящая дорожка, соединенная с задним охранным электродом, может быть сформирована поверх изолирующего слоя, который сформирован поверх токопроводящей дорожки, соединенной с измерительным электродом. Эта конструкция также может быть доопределена так, что включает в себя токопроводящую дорожку, соединенную с экранирующим электродом, сформированным поверх изолирующего слоя, который сформирован поверх токопроводящей дорожки, соединенной с задним охранным электродом, как показано, например, на Фиг. 21D.
На Фиг. 16A показан поперечный разрез через проекционный объектив и стопу 132 дефлектора литографической машины, в которой применяют заряженные частицы. Стопа 132 обычно содержит элементы проекционного объектива, уложенные друг на друга по вертикали, и элементы дефлектора для элементарных пучков, предназначенные для фокусировки элементарных пучков заряженных частиц, сгенерированных литографической машиной, на поверхности полупроводниковой пластины и для их отклонения по поверхности полупроводниковой пластины в виде растра. Каждый из уложенных друг на друга по вертикали элементов проекционного объектива может фактически содержать множество проекционных объективов для одновременной фокусировки большого количества элементарных пучков на поверхности полупроводниковой пластины, причем каждый элементарный пучок служит для экспонирования различного участка полупроводниковой пластины, и каждый элемент дефлектора может, аналогичным образом, содержать множество дефлекторов.
Стопа 132 линз объектива установлена на элементе 130 рамы корпуса. Монтажная пластина 112, которая также может функционировать в качестве прокладки между двумя элементами стопы, представляющими собой электростатические линзы, расположена ниже и прикреплена к элементу 130 рамы с расположенным в центре отверстием, через которое проецируют пучок заряженных частиц. Пластина/прокладка 112 может быть выполнена из стекла или из другого подходящего изоляционного материала для обеспечения изолирующего слоя между высокими напряжениями, присутствующими в стопе 132 линз объектива и на нижней линзе 104, на полупроводниковой пластине, на датчиках и на других близлежащих компонентах. Пластина 112, вместе с элементом 130 рамы, который обычно имеет цилиндрическую форму, и верхней монтажной пластиной 133 образует конструкцию корпуса для стопы 132 линз проекционного объектива и дефлектора.
В альтернативном варианте пластина 112 может быть проводящей или включать в себя проводящий слой, который функционирует в качестве экранирующего электрода для емкостных датчиков. Пластиной 112 также может являться подложка 102, на которой могут быть сформированы датчики. В показанном варианте осуществления изобретения стопа 132 линз проекционного объектива содержит группу элементов проекционного объектива, скомпонованных в виде вертикальной стопы, которая расположена большей частью выше пластины 112, но последний фокусирующий элемент 104 объектива в стопе расположен ниже пластины на нижней поверхности пластины 112.
На Фиг. 16B показана компоновка датчиков для измерения расстояния, связанного с расстоянием между нижней проекционной линзой 104 стопы линз проекционного объектива и полупроводниковой пластиной 9, опорой для которой служит подвижный стол 134 для полупроводниковых пластин. Следует отметить, что для удобства полупроводниковая пластина и стол показаны схематично, их ширина фактически является намного большей, чем ширина корпуса стопы линз. Диаметр полупроводниковой пластины обычно равен 200 мм или 300 мм, а диаметр корпуса стопы линз равен 50 - 70 мм. Датчики 30 установлены на той же самой пластине 112, что и нижняя проекционная линза 104, и в непосредственной близости к линзе 104. Датчики предпочтительно являются меньшими, чем размер поля экспонирования литографической машины, и некоторые или все датчики могут быть расположены ближе к краю проекционного объектива, чем расстояние, равное ширине или длине размера поля экспонирования.
В этой компоновке датчики установлены неподвижно относительно проекционного объектива, вследствие чего расстояние между нижней проекционной линзой 104 и полупроводниковой пластиной 9 может быть определено по измеренному расстоянию между датчиками и полупроводниковой пластиной. Очень малый размер описанных здесь датчиков позволяет устанавливать датчики в непосредственной близости к проекционному объективу и обеспечивает возможность их установки на том же самом опорном элементе, что и последний фокусирующий элемент проекционного объектива, таким образом, как датчики, так и фокусирующий элемент проекционного объектива зафиксированы в одной и той же опорной точке. Поскольку датчики объединены с нижней проекционной линзой в одной конструкции, это значительно уменьшает погрешности вследствие изменений взаимного положения датчиков и проекционного объектива, вызванных, например, тепловым расширением и сжатием, и относительным перемещением опорного элемента, на котором установлена нижняя проекционная линза, и опорного элемента, на котором установлены датчики, и вследствие неточности монтажа различных основных конструкций, соответственно, для датчиков и для нижней проекционной линзы. Это приводит к устранению необходимости калибровки системы датчиков при изменениях по осям x и у (то есть параллельно поверхности полупроводниковой пластины) и по оси z (то есть перпендикулярно поверхности полупроводниковой пластины) или по меньшей мере к меньшей необходимости такой калибровки. Обычные емкостные датчики являются слишком высокими и широкими для установки на пластине 112, и их необходимо устанавливать дальше от проекционного объектива 104, например на элементе 131 рамы.
Эффект фокусировки определяется, в основном, последней (нижней) проекционной линзой 104. В описанных выше признаках объединенной конструкции емкостные датчики высоты объединены с проекционным объективом так, что между датчиками и той областью, где последний элемент проекционного объектива создает фокус, отсутствуют какие-либо иные элементы. Единственным существенным изменением в объединенной системе является то, что допускается наличие одного электрода проекционного объектива 104, который является очень тонким элементом (обычно толщиной 200 мкм или менее). Связь между датчиком и проекционным объективом нарушает только лишь допустимое отклонение последнего элемента 104. Абсолютной мерой для емкостных датчиков является, по существу, совпадение расстояния от фокусирующего элемента до поверхности полупроводниковой пластины, то есть до плоскости/местоположения, пучки сфокусированы, за исключением допуска на толщину фокусирующего элемента (последнего элемента проекционного объектива). Эта неопределенность по толщине в фокусирующем элементе равна лишь небольшой доле необходимого диапазона измерений и рабочего диапазона датчиков, поэтому дополнительная калибровка датчика не требуется, за исключением 'измерения на бесконечности' для определения остальной емкости датчиков. Она может быть определена путем простого измерения на бесконечности, то есть без полупроводниковой пластины, установленной на ее месте. Тесное объединение датчиков и проекционного объектива минимизирует общую погрешность системы, вследствие чего считываемые показания емкостных датчиков являются достаточно точными для использования их в литографической машине без дополнительной калибровки. Дополнительное преимущество состоит в том, что минимальная сложность конструкции обеспечивает возможность измерения расстояния до мишени (полупроводниковой пластины) близко к экспонирующим пучкам, что дополнительно минимизирует погрешность измерений.
Датчики расположены на пластине 112 рядом с нижней поверхностью проекционного объектива 104. Для датчиков, сконструированных как отдельные элементы, например, согласно тонкопленочной конструкции такого типа, которая показана на Фиг. 5-9, отдельные датчики могут быть прикреплены непосредственно к монтажной пластине 112, например, клеем. Для датчиков, сформированных на общей подложке, например, такого типа, который показан на Фиг. 13A-13D, подложка датчиков может быть прикреплена к монтажной пластине 112 также с использованием клея или иного средства крепления. Общая подложка датчиков также может функционировать в качестве монтажной пластины 112.
Нижняя поверхность проекционного объектива 104 может быть расположена, по существу, на той же самой высоте, что и нижняя поверхность измерительных электродов датчиков 30, или может быть расположена немного ниже. За счет проектирования системы так, чтобы расстояние, которое желательно измерять, было почти равным фактически измеряемому расстоянию (то есть расстоянию между нижней поверхностью измерительных электродов и измеряемой мишенью), повышают чувствительность системы. В одном из вариантов осуществления изобретения, когда его используют для литографической машины, нижняя поверхность проекционного объектива 104 продолжается на 50 мкм вниз относительно нижней поверхности измерительных электродов датчиков 30. Фокальная плоскость проекции расположена на 50 мкм ниже нижней поверхности проекционного объектива и на 100 мкм ниже измерительных электродов. Стол для полупроводниковых пластин имеет диапазон перемещения по оси z (по вертикали) равный 80-180 мкм, ниже нижней поверхности измерительных электродов, с точностью позиционирования, равной 100 нм, причем верхнее значение из этого диапазона соответствует перемещению полупроводниковой пластины на расстояние 80 мкм от измерительных электродов, а нижнее значение из этого диапазона соответствует перемещению полупроводниковой пластины на расстояние 180 мкм ниже измерительных электродов.
На Фиг. 17A-17D показана конструкция 120 гибкой печатной платы с множеством датчиков 30 и с интегрированным гибким печатным соединителем 110. Конструкция 120 содержит гибкую основу из изоляционного материала, такого как, например, полиимидная пленка из каптона или аналогичная гибкая изолирующая пленка. Проводящие электроды для датчиков и токопроводящие дорожки для создания соединительных шин сформированы из тонкого слоя меди или иного подходящего проводящего материала, прикреплены к изолирующему слою основы с использованием клея, сформированы в виде слоистого материала без приклеивания, например, с использованием способа прямой металлизации, или напечатаны на изолирующем слое с использованием проводящих чернил или иными подходящими способами печати. Затем может быть сформирована защитная изолирующая пленка поверх проводящих слоев.
В варианте осуществления изобретения, показанном на Фиг. 17B, восемь пар датчиков расположены в виде квадратной матрицы вокруг квадратного выреза 121 вмещающего нижнюю проекционную линзу 104. Вместо пар датчиков также могут использоваться одиночные датчики, и также могут использоваться различные схемы пространственного расположения датчиков или пар датчиков. Гибкий слой основы включает в себя продолженные участки, которые функционируют в качестве гибких печатных соединителей 110, сконструированные так, как описано выше, для создания электрических соединений между датчиками и системой обработки сигналов. Гибкие печатные соединители 110 соединены с соединителями 116, которые обеспечивают снятие механических напряжений и сопряжение с трехжильными коаксиальными кабелями 210 для соединения с дистанционной системой обработки сигналов.
Объединение датчика, соединений и межсоединений, необходимых для передачи сигналов с датчика в место на удалении от датчика, где могут быть созданы более крупные и более надежные соединения, решает несколько проблем. Очень малый размер датчика затрудняет создание электрических соединений вследствие ограничений межсоединений и аппаратной части соединителей по размеру. Должен быть обеспечен контроль емкостей, вносимых межсоединениями, чтобы они не преобладали над емкостью системы датчиков. Любое небольшое перемещение или любая небольшая вибрация межсоединений могут приводить к повреждению датчика или к необходимости его перекалибровки. Объединение как самого датчика, так и межсоединений датчика на одном гибком слое основы способом печати на гибких материалах обеспечивает возможность реализации соединений в датчике очень малого размера, причем емкости, вносимые межсоединениями, могут быть проконтролированы во время проектирования системы, и объединение на одном слое основы создает механически надежную конструкцию, что сильно уменьшает проблемы, связанные с перемещением межсоединений.
Объединение множества датчиков с соответствующими им межсоединениями на одном слое основы обеспечивает дополнительные преимущества. За счет формирования матрицы датчиков на одной основе пространственное расположение датчиков является зафиксированным при изготовлении, и большая интегральная структура облегчает обработку и прикрепление к оборудованию, например к литографической машине.
Схемы 200 предварительной обработки сигналов могут быть встроены в гибкий печатный соединитель способом печати или иным способом формирования схем на гибком слое основы. Схемы 200 предварительной обработки сигналов могут включать в себя буфер/усилитель, используемый для активного смещения охранных электродов датчика (его описание приведено ниже), могут включать в себя дополнительные схемы или могут быть исключены, чтобы локально относительно проекционного объектива были расположены только аппаратные средства соединений, а все активные компоненты были расположены на удалении. Поскольку литографическая машина работает в вакууме, то размещение активных компонентов близко к датчикам и в вакууме может приводить к проблемам, связанным с рассеянием тепла от активных компонентов, вследствие недостаточного теплообмена в вакууме. Однако расположение компонентов, необходимых для активной защиты, вблизи охранных электродов улучшает рабочие характеристики системы. В варианте осуществления изобретения, показанном на чертеже, схемы 200 предварительной обработки сигналов расположены рядом с соединителями 116, чтобы тепло, выработанное схемами, могло более эффективно проходить через соединители 116 к кабелям 210 и выводиться из конструкции датчика.
На Фиг. 18 показан альтернативный вариант компоновки соединений. Гибкий печатный соединитель 110 на одном конце соединен с датчиком 30 на монтажной пластине 112, а на другом конце со схемой 200 предварительной обработки сигналов посредством соединительных проводов или штырьков 201. Блок 200 предварительной обработки сигналов может быть установлен на элементе 131 рамы, предпочтительно в углублении или в нише. Выходной сигнал из схем 200 предварительной обработки сигналов передают в систему управления через провода или штырьки 202, соединитель 204 и трехжильный коаксиальный кабель 210.
На Фиг. 19A и Фиг. 19B показана компоновка для установки конструкции 120, представляющей собой интегральную гибкую печатную плату (которая показана на Фиг. 17A-17D), на литографическую машину. На Фиг. 19A эта компоновка показана на виде сверху, на котором стопа линз проекционного объектива удалена для улучшения видимости, а конструкция 120, представляющая собой гибкую печатную плату, расположена в углублении в элементе 136 рамы. Соединители 116 соединены трехжильными коаксиальными кабелями 210 со жгутом 212 кабелей, который, в свою очередь, соединен с кабелями 214 для соединения с удаленной системой обработки сигналов. На Фиг. 19B конструкция 120, представляющая собой гибкую печатную плату, и датчики 30, обращенные к полупроводниковой пластине, показаны на виде снизу.
Конструкция 120, представляющая собой гибкую печатную плату, может быть прикреплена к нижней поверхности монтажной пластины, например монтажной пластины 112, показанной на Фиг. 16A и Фиг. 16B, с использованием клея или иным подходящим способом прикрепления. Это приводит к объединению матрицы датчиков вместе с соответствующими межсоединениями с монтажной пластиной 112 и с нижней проекционной линзой 104 в единую конструкцию. В силу этого датчики установлены в непосредственной близости к проекционному объективу и неподвижно относительно проекционного объектива, что приводит к описанным выше преимуществам для варианта осуществления изобретения, показанного на Фиг. 16A и Фиг. 16B.
На Фиг. 20A, Фиг. 20B и Фиг. 20D показаны различные конфигурации емкостных датчиков на монтажной пластине 112, расположенной вокруг проекционного объектива 104 литографической машины. На Фиг. 20A четыре пары датчиков распределены в четырех квадрантах монтажной пластины 112, причем эти датчики расположены попарно для обеспечения дифференциальной регистрации. На нижней стороне монтажной пластины каждый датчик содержит измерительный электрод 31 и может также включать в себя боковой охранный электрод 32. Эта компоновка является особенно подходящей для измерения высоты и наклона полупроводниковой пластины. На Фиг. 20B показана компоновка из шестнадцати датчиков, расположенных попарно в виде квадратной матрицы, причем в середине квадрата, где расположен проекционный объектив 104, датчики отсутствуют. Для всех описанных выше конфигураций на задней стороне подложки датчика предпочтительно содержатся задние охранные электроды, и, как описано выше, на ней также могут содержаться экранирующие электроды. На Фиг. 20C показаны полупроводниковые пластины 9a, b, c, d в различных положениях относительно монтажной пластины 112 и датчиков, причем из четырех углов проекционного объектива 104 выступают области наложения между четырьмя положениями полупроводниковой пластины, описывающими четыре области 115 на пластине 112. На Фиг. 20D показаны четыре пары датчиков (дифференциальные пары), расположенные в этих четырех областях 115.
При таком расположении областей 115 датчики распределяют для максимизации возможности измерения расстояния до поверхности полупроводниковой пластины по меньшей мере одним датчиком или парой датчиков. Если полупроводниковая пластина расположена так, что над полупроводниковой пластиной расположен только один датчик/расположена только одна пара, то измерение расстояния до поверхности полупроводниковой пластины производят на основании только одного этого датчика/только одной этой пары. Как только другой датчик/другая пара становится расположенным выше полупроводниковой пластины, то результаты измерения также берут с этого датчика/с этой пары, и среднее значение расстояния может быть вычислено по этим двум датчикам/парам над полупроводниковой пластиной. Аналогичным образом, учитывают показания третьего и четвертого датчика/третьей и четвертой пар, когда они становятся расположенными над полупроводниковой пластиной. Учет показаний дополнительных датчиков/пар предпочтительно включают в состав вычисления среднего расстояния с затуханием, например, путем постепенного учета вклада дополнительных датчиков/пар во избежание внезапных ступенчатых изменений результирующего измеренного значения расстояния.
Размер монтажной пластины 112 определяет минимальный размер мишени, который обычно равен 60 мм. Для полупроводниковых пластин диаметром 300 мм четыре области 115 наложения между положениями 9a-9d полупроводниковой пластины указывают подходящие области расположения датчиков. Однако датчики предпочтительно устанавливают настолько близко к фактической области проецирования света или электронных пучков в литографической машине, насколько это возможно. При увеличении размеров полупроводниковой пластины, например, до 450 мм области 115 стремятся увеличиться, поскольку круглые участки, определяющие области 115, стремятся превратиться в прямые линии.
На Фиг. 21A и Фиг. 21B показан вариант осуществления конструкции 120, представляющей собой гибкую печатную плату, с четырьмя парами 30a, 30b дифференциальных датчиков. Конструкция 120 может быть сформирована из гибкой основы из изоляционного материала, например полиимидной пленки из каптона или аналогичной гибкой изолирующей пленки подобно варианту осуществления изобретения, показанному на Фиг. 17A-17D, и также может включать в себя один или более интегрированных гибких печатных соединителей 110. В показанных вариантах осуществления изобретения на виде снизу лицом к измерительным электродам (без какого-либо изолирующего защитного слоя поверх датчиков, чтобы можно было увидеть измерительные электроды), эти четыре пары датчиков скомпонованы так, что расположены в областях 115, показанных на Фиг. 20D, вокруг нижней проекционной линзы 104. Вместо пар датчиков также могут использоваться одиночные датчики. Объединение датчиков и проводных соединений обеспечивает возможность создания простых и надежных соединений с очень малыми датчиками и регулирования емкостей, вносимых межсоединениями. На Фиг. 21A проиллюстрирован вариант осуществления изобретения с круглыми датчиками. На Фиг. 21B проиллюстрирован вариант осуществления изобретения с датчиками четырехугольной формы для максимального использования области 115 (датчики для простоты показаны с острыми углами, хотя предпочтительными являются закругленные углы, как показано, например, на Фиг. 9D).
На Фиг. 21C показана конструкция 120, представляющая собой гибкую печатную плату, на виде под углом сзади датчиков. Четыре интегрированных гибких соединителя 110 изогнуты и продолжаются вверх от слоя основы 120. Токопроводящие дорожки продолжаются из электродов датчика в каждом датчике вдоль гибких соединителей 110, а затем вокруг гибких мембран 122 и 123 для соединения с кабелями для соединения с дистанционной схемой. Сверху виден слой основы, и показаны задние охранные электроды 35a, 35b датчиков (изолирующие слои, и какие-либо экранирующие электроды отсутствуют, чтобы можно было увидеть задние охранные электроды) с токопроводящими дорожками 114b, сформированными на внутренней стороне 110b соединителей перегиба 110. На внешней стороне 110a гибких соединителей 110 также могут быть сформированы токопроводящие дорожки. Эти токопроводящие дорожки могут быть сформированы из тонкого слоя меди или иного подходящего проводящего материала, прикрепленного к изолирующему слою с использованием клея, сформированы в виде слоистого материала без приклеивания или напечатаны на изолирующем слое, как в варианте осуществления изобретения, показанном на Фиг. 17A-17D.
На Фиг. 21D на виде в разрезе показан датчик 30 и соответствующий гибкий соединитель 110. Токопроводящие дорожки 114a-114e продолжаются из электродов датчика вдоль гибкого соединителя 110 для соединения датчика с дистанционной схемой. В этом варианте осуществления изобретения токопроводящие дорожки 114a-114e сформированы из того же самого материала, что и электроды датчика, и выполнены в виде единого целого с ними как продолжение электродов. Токопроводящие дорожки расположены в слоях таким же самым образом, что и электроды датчика. Изолирующий слой 34 включает в себя расширенную часть для гибкого соединителя 110. Токопроводящая дорожка 114a продолжается из измерительного электрода 31, причем оба этих элемента сформированы на изолирующем слое 34. Токопроводящая дорожка 114b продолжается из заднего охранного электрода 35, причем оба этих элемента сформированы между изолирующими слоями 34 и 43, а токопроводящая дорожка 114b является более широкой, чем токопроводящая дорожка 114a, вследствие чего токопроводящая дорожка 114b имеет периферийную часть, которая функционирует в качестве бокового охранного электрода для токопроводящей дорожки 114a. По токопроводящей дорожке 114a передают сигнал из измерительного электрода, и она имеет некоторую емкость относительно проводников в окружающей среде. Проводники вблизи токопроводящей дорожки 114a влияют на эту емкость таким же самым образом, как они влияют на измерительный электрод датчика. Токопроводящая дорожка 114b сконструирована так, что действует в качестве бокового охранного электрода, для уменьшения возмущений из-за близлежащих проводников.
В тех случаях, когда датчик включает в себя экранирующий электрод, токопроводящая дорожка 114d продолжается из экранирующего электрода 44, причем оба этих элемента сформированы между изолирующими слоями 43 и 38. Такая компоновка усиливает влияния экранирующего электрода вдоль длины токопроводящей дорожки 114a, по которой передают сигнал с измерительного электрода измерительного прибора, для уменьшения возмущений, вносимых в результаты измерения расстояния, и внешних воздействий.
В варианте осуществления изобретения, показанном на Фиг. 21C, токопроводящие дорожки 114b и 114d и промежуточные изолирующие слои продолжаются внутрь на внутренней поверхности 110b гибких соединителей. Аналогичная компоновка может быть продублирована на наружной поверхности 110a гибких соединителей. Изолирующий защитный слой 37 может быть сформирован и продолжаться вдоль гибкого соединителя 110 поверх токопроводящей дорожки 114a, причем над токопроводящей дорожкой 114a вдоль гибкого соединителя продолжается токопроводящая дорожка 114c с периферийными частями, выступающими по обе стороны от нее. В этом случае токопроводящая дорожка 114c может быть электрически соединена с токопроводящей дорожкой 114b, соединенной с задним охранным электродом, что, таким образом, приводит к тому, что токопроводящая дорожка 114c имеет тот же самый потенциал, что и задний охранный электрод. Токопроводящая дорожка 114c также может быть напрямую соединена с задним охранным электродом или электрически соединена каким-либо иным средством.
Аналогичным образом, может быть сформирован еще один изолирующий слой 43a, продолжающийся вдоль гибкого соединителя поверх токопроводящей дорожки 114c, а другая токопроводящая дорожка 114e продолжается вдоль гибкого соединителя над токопроводящей дорожкой 114c. Токопроводящая дорожка 114c может быть электрически соединена с токопроводящей дорожкой 114d с или с жилой кабеля для соединения с потенциалом земли, предпочтительно с землей на удалении от датчика. Наконец, поверх может быть сформирован защитный слой 38a.
При этой двусторонней компоновке токопроводящая дорожка 114a, по которой передают сигнал с измерительного электрода, фактически расположена между продолжениями заднего охранного электрода, и эта объединенная структура расположена между продолжениями экранирующего электрода, что, следовательно, сильно уменьшает помехи при измерении расстояния и внешние воздействия.
Токопроводящие дорожки 114a-114e могут быть соединены на концах, удаленных от датчиков, с кабелем для передачи сигналов от датчиков в дистанционную схему. Для этого может использоваться трехжильный коаксиальный кабель, в котором центральная жила кабеля соединена с токопроводящей дорожкой 114a, средняя жила кабеля соединена с токопроводящими дорожками 114b и 114c, а внешняя жила кабеля соединена с токопроводящими дорожками 114d и 114e. Эти соединения могут быть созданы путем экспонирования металлических контактных площадок каждой токопроводящей дорожки через отверстия в вышележащих изолирующих слоях.
Конструкция датчика и соединителя, показанная на Фиг. 21C, является пригодной для установки матрицы емкостных датчиков на проекционном объективе литографической машины и для ее соединения с ним. Эта компоновка обеспечивает достижение нескольких целей, обеспечивая гибкий слой основы для монтажа очень малых тонкопленочных емкостных датчиков непосредственно на той же самой монтажной пластине, на которой установлен последний элемент проекционного объектива и в непосредственной близости к фокусу проекционного объектива. Этот способ установки устраняет необходимость калибровки системы датчиков из-за изменений по высоте между измерительными элементами и проекционным объективом. Интегрированные соединители, являющиеся продолжением электродов датчика, создают надежные электрические соединения с датчиком, которые вносят минимальные изменения емкости системы, устраняет необходимость калибровки из-за изменений в соединениях с датчиком.
Это приводит к очень простой системе, в которой не требуется калибровка на месте. Может быть определена остальная емкость датчиков (что может быть выполнено просто путем измерения на бесконечности, то есть без полупроводниковой пластины перед датчиком) и после этого скомпенсирована. Дополнительная калибровка датчиков не требуется, поскольку остальная емкость датчиков является, по существу, неизменной. Паразитные емкости (например, вследствие небольших перемещений межсоединений) легко сохраняются низкими, поскольку перемещения или вибрации соединений в значительной степени устраняются неподвижной конструкцией соединений и трехжильным коаксиальным кабелем. Результирующая структура легко закрепляется в литографической машине и облегчает снятие и замену датчиков или объединенной конструкции "проекционный объектив плюса датчики" без длительной перекалибровки.
Электронные схемы
На Фиг. 22 показана система 300 датчиков, содержащая один или более датчиков-зондов 30, систему 301 обработки сигналов и систему 302 соединений для передачи сигналов из датчиков-зондов в систему обработки сигналов. Система 301 обработки сигналов может включать в себя схему источника тока или источника напряжения для возбуждения датчиков-зондов, схему усилителя/буфера для усиления исходного сигнала от датчика, схему для электрического смещения охранных электродов датчика и для соединения с жилами кабеля, схему обработки сигналов для обработки сигналов, полученных с зондов, и для вывода обработанных сигналов как данных измерений, и схему для калибровки системы. Система 302 соединений может включать в себя кабели для соединения датчиков с системой обработки сигналов.
Каждая часть системы может являться источником погрешностей измерений различных типов и факторов, уменьшающих чувствительность. Датчики-зонды вносят погрешности вследствие конечной геометрии зондов и ограничений, наложенных на технологический процесс, что приводит к неровностям и к неточности геометрической конфигурации электродов датчика и других компонентов. Собственные/паразитные емкости, обусловленные конструкцией датчика-зонда, и взаимодействие с другими компонентами вблизи зондов могут снижать чувствительность датчиков.
Погрешности может вносить монтаж зондов в результате наклона или неплоскостности монтажной поверхности или зондов и допусков по месторасположению и иных факторов, относящихся к монтажу. Погрешности может вносить система обработки сигналов из-за погрешностей обработки сигналов, допусков на схемные компоненты, внешних или внутренних помех и иных факторов. Погрешности также может вносить система соединений, например дополнительные емкости, вносимые соединительными компонентами, например соединительными шинами, контактными площадками, соединительными проводами и кабельной разводкой.
Для обнаружения изменения емкости датчиков, которая отображает расстояние между датчиком и мишенью, могут использоваться различные конфигурации усилителя. На Фиг. 23A показана упрощенная принципиальная электрическая схема высокоимпедансного усилителя. В усилителе с высоким входным импедансом используют конфигурацию неинвертирующего усилителя 305 с единичным усилением. С усилителем соединен источник 306 переменного тока в качестве источника входного сигнала, параллельно с датчиком-зондом 30. Эта схема создает линейный выходной сигнал 309, пропорциональный изменению емкости, которая изменяется при изменении расстояния между датчиком-зондом 30 и мишенью 9.
Датчик 30 подключен между входом усилителя и землей или виртуальным заземлением, то есть один электрод измеряемой емкости соединен с землей. Однако для измерений расстояния до полупроводниковой пластины измерительный электрод датчика образует один из электродов измеряемой емкости, тогда как проводящий слой в полупроводниковой пластине образует другой электрод. Проводящий слой полупроводниковой пластины 9 обычно имеет емкостную связь с землей через стол 134 для полупроводниковых пластин и иные компоненты литографической машины. Емкость между полупроводниковой пластиной и землей обычно варьируется от 6 пФ до 70 нФ, и номинальное значение емкости датчика обычно составляет от приблизительно, 0,1 пФ до приблизительно 1 пФ. Для точного измерения небольших изменений расстояния между датчиком 30 и полупроводниковой пластиной 9 необходимо, чтобы емкость "полупроводниковая пластина-земля" была по меньшей мере в 1000 раз большей, чем номинальная емкость датчика. Поскольку диапазон изменения емкости "полупроводниковая пластина-земля" является довольно большим, то небольшие изменения этой емкости могут влиять на результаты измерения расстояния. Если емкость "полупроводниковая пластина-земля" не является по меньшей мере в 1000 раз большей, чем номинальная емкость датчика, то небольшие изменения емкости "полупроводниковая пластина-земля" вызывают изменения измеренной емкости и нежелательные изменения результатов измерения расстояния.
При использовании принципа дифференциальных измерений два датчика 30a, 30b из дифференциальной пары возбуждают источниками 306a, 306b тока, которые имеют сдвиг по фазе на 180 градусов, как показано на Фиг. 23B. Ток через один зонд находит путь через проводящий слой в мишени. Виртуальная "земля", то есть самый низкий потенциал или постоянный потенциал на пути тока, создана в центре пути тока. Для измерения сигналов напряжения, соответствующих изменению расстояния между датчиками и проводящим слоем в мишени, используют высокоимпедансные усилители 305a, 305b. Принцип дифференциальных измерений делает измерение расстояния независимым от изменения импеданса "полупроводниковая пластина-земля".
На Фиг. 24A показан альтернативный вариант схемы для электрического смещения датчика 30 посредством источника напряжения. Два постоянных импеданса 71 и 72, переменная емкость 73 и датчик 30 (показанный как переменная емкость) скомпонованы в схему моста Уитстона, питание на который подают из источника 306 напряжения. Мост имеет два плеча, скомпонованные в виде параллельной схемы, причем импеданс 71 и переменная емкость 73 соединены вместе в первом узле и образуют одно плечо, а импеданс 72 и датчик 30 соединены во втором узле и образуют другое плечо. Постоянные импедансы 71 и 72 имеют идентичные значения импеданса, а переменная емкость 73 отрегулирована так, что совпадает с номинальной емкостью датчика 30. Эти два узла в середине каждого плеча моста соединены с двумя входами дифференциального усилителя 75, который измеряет разность напряжения, приложенного к узлам, то есть к переменной емкости 73 и датчику 30. Переменная емкость настроена так, чтобы было отрегулировано нулевое значение дифференциального усилителя, и может быть отрегулирована посредством алгоритма автоматизированной калибровки.
Компоненты моста и дифференциальный усилитель могут быть расположены в датчике. При использовании совместно с гибкой печатной конструкцией, показанной на Фиг. 17A-17D, постоянные импедансы 71, 72 могут быть сформированы в том же самом гибком слое основы, что и датчик. Переменная емкость 73 может быть сформирована с использованием диода переменной емкости (варикапа) или иного подходящего компонента. Переменная емкость 73 также может быть встроена в гибкий слой основы в качестве компонента, установленного или сформированного на слое основы, или встроенного в саму гибкую структуру, с использованием медных и изолирующих слоев. Дифференциальный усилитель может быть сформирован на слое основы, но также применимы рассмотренные выше соображения относительно активных компонентов в вакууме. Когда дифференциальный усилитель расположен на удалении и для соединения с датчиком и переменной емкостью использован кабель одной и той же длины, то влияние емкости кабеля может быть устранено, и синфазные возмущения могут быть взаимно скомпенсированы.
На Фиг. 24B показана схема из Фиг. 24A, реализованная для дифференциальной пары датчиков. Каждый датчик 30a, 30b из пары соединен с постоянным импедансом 71, 72, и обеспечено его смещение источником 306a, 306b напряжения. Компоновка моста Уитстона теперь сформирована посредством постоянных емкостей 71 и 72 и пары датчиков 30a и 30b, которые соединены через проводящий резист полупроводниковой пластины на мишени.
На Фиг. 25 показан вариант осуществления изобретения, в котором используют дифференциальные измерения с использованием схем высокоимпедансных усилителей. Два датчика 30a, 30b скомпонованы в виде дифференциальной пары. Измерительный электрод 31a датчика 30a возбуждают источником 306a переменного тока, а измерительный электрод 31b датчика 30b возбуждают источником 306b переменного тока. Эти два источника 306a, 306b тока имеют сдвиг по фазе на 180 градусов один относительно другого. В течение одного полупериода ток 307 течет в одном направлении через датчик 30a и емкость 16a "датчик-мишень", через проводящий слой мишени 9, через емкость 16b "датчик-мишень" и через датчик 30b. В течение следующего полупериода ток течет в обратном направлении.
Усилитель/буфер 305a усиливает исходное выходное напряжение датчика 30a для генерации выходного сигнала 309a для дальнейшей его обработки. Выходной сигнал 309a также может быть подан по линии обратной связи на боковой охранный электрод 32a и/или на задний охранный электрод 35a датчика 30a. Это обеспечивает реализацию активной защиты путем подачи на охранные электроды того же самого напряжения, которое присутствует на измерительном электроде, чтобы не образовывалось электрическое поле между измерительным электродом и охранным электродом, вследствие чего электрическое поле между измерительным электродом и мишенью является настолько однородным, насколько это возможно. Аналогичным образом, усилитель/буфер 305b усиливает исходное выходное напряжение датчика 30b для генерации выходного сигнала 309b и для обеспечения активного смещающего сигнала для охранных электродов датчика 30b. Выходные сигналы 309a, 309b могут быть поданы на входы соответствующих схем 330a, 330b синхронных детекторов.
Усилители 305a, 305b предпочтительно расположены вблизи датчиков 30a, 30b, в особенности, когда реализовано активное смещение охранных электродов, для предотвращения внесения погрешностей, вызванных дополнительными емкостями, вносимыми кабельной разводкой от датчиков до удаленного пункта, где производится обработка сигналов. В областях применения емкостного датчика для литографической машины, работающей в вакууме, размещение активных компонентов вблизи датчиков обычно требует, чтобы эти компоненты были помещены в вакуумную камеру, что может привести к проблемам, связанным с рассеянием тепла, из-за недостаточной теплопередачи излучением в вакууме (хотя теплообмен, обусловленный теплопроводностью, все же происходит в вакууме). Поэтому источники 306a, 306b тока и дальнейшие схемы обработки сигналов, такие как, например, синхронные детекторы 330a, 330b могут быть расположены на удалении от датчиков вне вакуумной камеры. Однако в конфигурации, которая обеспечивает возможность отвода тепла от активных компонентов, усилители 305a, 305b предпочтительно расположены в вакуумной камере вблизи датчиков для обеспечения более низкой погрешности измерений.
На Фиг. 26 показан один из вариантов осуществления схемы 330 синхронного детектора. Генератор 331 опорного сигнала генерирует опорную частоту

Выходной сигнал 309 из датчика на частоте

Как указано выше, схемы источников тока для возбуждения датчиков и схемы обработки сигналов могут быть расположены на удалении от датчиков. Однако кабельное соединение, используемое для соединения датчиков с расположенными на удалении схемами, вносит дополнительные нежелательные емкости в систему. На Фиг. 27 изображена блок-схема, на которой показаны емкости в системе датчиков. Емкость Cin представляет собой сумму емкости кабеля и выходной емкости источника 306 тока, емкость Cs представляет собой сумму измеряемой емкости "датчик-мишень" и собственной (паразитной) емкости датчика и соединительных шин датчика, а емкость Cout представляет собой сумму емкости кабеля и входной емкости буфера 305. Паразитные емкости Cin и Cout должны быть малыми по сравнению с Cs и с измеряемой емкостью "датчик - мишень", поскольку большие паразитные емкости снижают чувствительность датчика.
Емкость кабеля, соединяющего датчики со схемами обработки сигналов, может быть большой и оказывать негативное влияние на чувствительность датчика. Для жил кабеля может использоваться активная защита для ослабления или устранения этой проблемы. На Фиг. 28A показана компоновка с кабелем 350, соединяющим датчики 30 со схемой 330 обработки сигналов. В показанной на компоновке усилитель/буфер 305 расположен локально относительно датчика 30 (слева от вертикальной пунктирной линии), а источник 306 тока расположен на удалении от датчика (справа от вертикальной пунктирной линии). Источник 306 тока передает ток в датчик 30 по центральной жиле 351 кабеля. Буфер 305 подает в коаксиальную жилу 352 то же самое напряжение, которое приложено к измерительным электродам датчика. Поскольку центральная жила 351 и коаксиальная жила 352 имеют одинаковое подаваемое на них напряжение, то влияние любой паразитной емкости между этими жилами фактически сведено к нулю.
На Фиг. 28B показаны соединения между жилами кабеля 350 и проводящими электродами датчика 30. Центральная жила 351 соединена с измерительным электродом 31, внутренняя коаксиальная жила 352 соединена с задним охранным электродом 35, а внешняя коаксиальная жила 353 соединена с экранирующим электродом 44.
В этом варианте осуществления изобретения кабелем является трехжильный коаксиальный кабель с третьей коаксиальной жилой 353, которая функционирует в качестве экрана и является заземленной. Экран предпочтительно соединен с отдельным заземлением на дальнем конце кабеля, например в схеме 330. Это заземление является просто заземлением экрана и предпочтительно не соединен с каким-либо заземлением в датчике.
Возможно множество альтернативных вариантов этой компоновки. Например, также может использоваться кабель, не являющийся коаксиальным, и буфер 305 может быть расположен на удалении от датчика для подачи напряжения в жилу 352 с дальнего конца кабеля 350 в месте расположения схем 330 обработки сигналов.
В обычных конструкциях, в которых датчики и схема поставлялись вместе одним изготовителем и калибровка которых производилась совместно на заводе как комплекта, чтобы электронные схемы соответствовали датчику и для предотвращения нелинейности, избегали физического разделения датчика и схемы обработки сигналов. В описанной здесь системе для быстрой калибровки измерительной системы может использоваться автоматизированный сценарий в сочетании с системой управления столом для полупроводниковых пластин, например, путем перемещения стола для полупроводниковых пластин в известные положения и получения результатов измерений с датчиков. Это устраняет необходимость рассматривать датчик и схему обработки сигналов как согласованную пару и позволяет заменять датчик, не заменяя также схему обработки сигналов, что существенно упрощает техническое обслуживание и сокращает время простоя литографической машины и, следовательно, повышает производительность.
На Фиг. 29 показан другой вариант осуществления синхронной схемы 360. Цифровой генератор (OSC) 376 опорного сигнала генерирует опорную частоту

Входной буфер 362 принимает сигнал 361 от датчика, и буферизованный сигнал поступает на вход полосового фильтра 363, который отфильтровывает шум и помехи от сигнала. Аналого-цифровой преобразователь (A/D) 364 преобразовывает отфильтрованный сигнал в цифровой сигнал. Затем используют цифровую обработку, таким образом, схема 360 объединяет аналоговую и цифровую обработку сигналов, используя наилучшие функции обеих. Цифровой отфильтрованный сигнал от датчика затем поступает на вход дифференциального усилителя 371 с одним входом и с дифференциальным выходом (или фазорасщепителя), имеющего два дифференциальных выходных сигнала, один из которых является синфазным с входным сигналом, и другой выходной сигнал имеет сдвиг по фазе на 180 градусов относительно входного сигнала. Смеситель 372 принимает дифференциальные выходные сигналы (на частоте


Для автоматической калибровки схемы синхронного детектора для системы датчиков может использоваться алгоритм калибровки. Этот алгоритм обеспечивает ступенчатую регулировку дискретного фазовращателя 377 для увеличения или уменьшения задержки по фазе и обеспечивает текущий контроль выходного сигнала из смесителя 372. Фазовращатель регулируют до того момента, пока не будет достигнуто максимальное значение выходного сигнала из смесителя 372, указывающее, что опорный сигнал и сигнал от датчика являются синфазными.
Цифровая обработка в схеме синхронного детектирования может быть реализована с использованием программируемой пользователем вентильной матрицы (FPGA), и алгоритм калибровки также может быть реализован в FPGA и/или в программном обеспечении, работающем в сочетании с FPGA.
Эта конструкция с автоматизированной калибровкой позволяет производить замену датчика или матрицы датчиков без необходимости замены или перекалибровки также и схемы обработки сигналов, которая обрабатывает сигналы измерений от датчика или от датчиков. Традиционные конструкции системы датчиков включали в себя датчики и схему обработки сигналов, откалиброванные вместе на заводе как согласованный комплект, вследствие чего при замене датчика также требуется замена схемы обработки сигналов. Алгоритм автоматизированной калибровки обеспечивает возможность замены датчиков независимо от схем обработки сигналов и убыстряет калибровку новых датчиков с существующими схемами обработки сигналов, что очень упрощает техническое обслуживание и сокращает время простоя литографической машины. Это обеспечивает меньшее время простоя и, следовательно, более высокую производительность литографической машины.
На Фиг. 30 изображена упрощенная схема электрической схемы обработки для дифференциальной пары датчиков 30a, 30b. Электрическое смещение датчиков обеспечивают источники 306a, 306b тока (или напряжения), которые работают со сдвигом по фазе на 180 градусов. Выходной сигнал с каждого датчика 30a, 30b подают в соответствующие схемы 360a, 360b синхронных детекторов, а выходные сигналы из схем синхронных детекторов подают на вход схемы 380, реализующей функцию вычитания. Выходные сигналы с выходов схем синхронных детекторов имеют сдвиг по фазе на 180 градусов, и, следовательно, вычитание функционирует так, что устраняет синфазные помехи из двух выходных сигналов из схемы синхронного детектора, сохраняя сигналы с датчиков.
Емкостные датчики могут использоваться для управления позиционированием полупроводниковой пластины для литографической машины. На Фиг. 31 изображена блок-схема такой системы управления. Датчики 30 измеряют расстояние, связанное с расстоянием между проекционным объективом 104 литографической машины и полупроводниковой пластиной 9, лежащей на подвижном столе 134 для полупроводниковых пластин. В этой компоновке датчики установлены неподвижно относительно проекционного объектива, вследствие чего расстояние между проекционным объективом и полупроводниковой пластиной может быть определено по измеренному расстоянию от датчиков до полупроводниковой пластины. Сигналы от датчиков передают в блок 301 обработки сигналов, а данные измерений, выведенные блоком обработки сигналов, передают в блок 400 управления. Блок 400 управления может использоваться для управления перемещением стола для полупроводниковых пластин по оси z (по вертикали) для удержания полупроводниковой пластины в фокальной плоскости проекционного объектива литографической машины, чтобы элементарные пучки заряженных частиц, сгенерированные машиной, оставались сфокусированными на поверхности полупроводниковой пластины при перемещении полупроводниковой пластины по осям x и y.
Система датчиков совместно с системой управления может использоваться для точного определения расстояния между проекционным объективом и полупроводниковой пластиной в различных точках при перемещении полупроводниковой пластины. Это позволяет системе определять топологию поверхности полупроводниковой пластины, обнаруживая наличие наклона или прогиба полупроводниковой пластины и иных неровностей на поверхности полупроводниковой пластины. Поверхность полупроводниковой пластины почти никогда не является абсолютно плоской. Типичная полупроводниковая пластина может иметь прогиб на ней до 50 мкм без прижима. Кроме прогиба полупроводниковой пластины поверхность полупроводниковой пластины может иметь иные неровности по своей поверхности. Прогиб полупроводниковой пластины и иные неровности приводят к изменениям высоты на поверхности полупроводниковой пластины, которые приводят к тому, что поверхность полупроводниковой пластины не находится в фокальной плоскости проекционного объектива. Система управления может использоваться для введения поправок на это изменение высоты для того, чтобы поверхность полупроводниковой пластины оставалась в фокальной плоскости проекционного объектива, используемого для фокусировки экспонирующих оптических пучков или экспонирующих пучков частиц на полупроводниковой пластине. Вертикальное положение стола для полупроводниковых пластин может быть отрегулировано так, чтобы скомпенсировать эти отклонения поверхности полупроводниковой пластины по высоте с использованием сигналов, переданных из датчиков.
Система спроектирована для измерения топологии поверхности полупроводниковой пластины во время технологической обработки (например, экспонирования) полупроводниковой пластины, а не для выполнения измерений заранее. Это уменьшает общую продолжительность технологической обработки полупроводниковой пластины и увеличивает производительность.
В одном из вариантов осуществления изобретения использована компоновка из восьми датчиков, расположенных в форме квадратной матрицы вокруг проекционного объектива, как показано на Фиг. 32A. Эта компоновка позволяет измерять наклон полупроводниковой пластины, прогиб полупроводниковой пластины и иные неровности, и экспонирование полупроводниковой пластины выполняют за одно сканирование полупроводниковой пластины. В типичной компоновке полупроводниковую пластину перемещают в направлении механического сканирования, при этом пучки оптического излучения или заряженных частиц в литографической машине сканируют по поверхности полупроводниковой пластины для экспонирования полупроводниковой пластины согласно экспонируемому рисунку.
В варианте осуществления изобретения, показанном на Фиг. 32A, когда полупроводниковую пластину перемещают в направлении 405 механического сканирования, то первый ряд датчиков A-C измеряет расстояние до поверхности полупроводниковой пластины в трех точках в линии на поверхности полупроводниковой пластины, соответствующих датчикам A, B и C. Наличие и величина наклона положения полупроводниковой пластины, прогиб полупроводниковой пластины или иные неровности поверхности могут быть вычислены путем сравнения результата измерения с датчика B с результатами измерения с датчиков A и C. Вычисленное значение наклона полупроводниковой пластины, прогиба или неровности вдоль линии сохраняют в запоминающем устройстве в системе управления. По мере продвижения полупроводниковой пластины в направлении 405 линия, ранее измеренная датчиками A-C, попадает под проекционный объектив 104 и готова к экспонированию. Датчики D и E по обе стороны от проекционного объектива измеряют расстояние до точек на линии, ранее измеренное датчиками A и C. Высота полупроводниковой пластины в точке под проекционным объективом теперь может быть вычислена на основании сохраненного значения и результатов текущих измерений из датчиков D и E. Система управления может использовать эту вычисленную высоту полупроводниковой пластины в точке под проекционным объективом для регулировки высоты стола для полупроводниковых пластин для гарантии того, что поверхность полупроводниковой пластины остается в фокальной плоскости проекционного объектива. Это обеспечивает возможность компенсации наклона, прогиба или иной неровности измеряемой поверхности полупроводниковой пластины и введения поправок на них за одно сканирование полупроводниковой пластины.
Третий ряд датчиков F-H предусмотрен для обеспечения возможности использования одного и того же способа, который описан выше, в обоих направлениях механического сканирования, то есть когда полупроводниковая пластина перемещается в направлении 405 или в противоположном направлении. На Фиг. 32A проиллюстрирована матрица из восьми датчиков, однако описанный выше способ может быть реализован с различным количеством датчиков. Кроме того, каждым датчиком, показанным на Фиг. 32A, может являться дифференциальная пара датчиков, выполняющая дифференциальные измерения в каждой точке A-H.
На Фиг. 32B показан другой вариант осуществления изобретения, имеющий компоновку из восьми датчиков в дифференциальных парах в четырех углах проекционного объектива 104. Эта компоновка пригодна, например, для литографических систем, в которых во время экспонирования полупроводниковая пластина достаточно хорошо зажата для уменьшения прогиба полупроводниковой пластины до приемлемого значения. Однако даже при наличии очень плоской поверхности стола для полупроводниковых пластин и хорошего зажима, удерживающего полупроводниковую пластину плотно прижатой к плоскости стола для полупроводниковых пластин, все же имеют место отклонения на поверхности полупроводниковой пластины вследствие отклонений в полупроводниковой пластине и в слое резиста на ее поверхности. В этом варианте осуществления изобретения при перемещении полупроводниковой пластины в направлении 405 механического сканирования первый ряд, содержащий пары A и B датчиков, измеряет расстояние до поверхности полупроводниковой пластины в двух точках на линии на поверхности полупроводниковой пластины, соответствующей положениям A и B. Измерения также могут проводиться парами C и D датчиков в положениях C и D.
Расстояние до полупроводниковой пластины в точках A, B, C и D, среднее расстояние до полупроводниковой пластины и наличие и величина наклона полупроводниковой пластины (например, наклон полупроводниковой пластины в направлении сканирования и в других направлениях) могут быть вычислены и сохранены в запоминающем устройстве в системе управления. Исходя из этих результатов измерений, может быть вычислено расстояние между центром проекционного объектива 104 и поверхностью полупроводниковой пластины.
На Фиг. 32C проиллюстрирован способ измерения для определения расстояния между проекционным объективом и поверхностью полупроводниковой пластины и величин наклона по поверхности полупроводниковой пластины. До экспонирования измеряют локальные градиенты полупроводниковой пластины в нескольких заданных местах, например в центре и в четырех равноотстоящих местоположениях вокруг периферии полупроводниковой пластины, как показано на Фиг. 32C. Управление столом для полупроводниковых пластин может осуществляться так, что регулируют наклон Rx стола для полупроводниковых пластин в направлении x и наклон Ry стола для полупроводниковых пластин в направлении y. Во время измерений наклон Rx и Ry стола для полупроводниковых пластин сохраняют равным постоянному значению.
Используя результаты измерений, блок обработки вычисляет карту высот на всей площади полупроводниковой пластины, подлежащей экспонированию. Исходя из карты высот вычисляют значения Rx(x,y) и Ry(x,y) поправок на наклон для приведения в движение стола для полупроводниковых пластин во время экспонирования, для наклона стола для полупроводниковых пластин для введения поправок на изменения высоты по поверхности полупроводниковой пластины. Могут быть вычислены постоянные поправки по наклону для всего экспонирования для направлений x и y, то есть в течение экспонирования Rx(x,y) является постоянной величиной и Ry(x,y) является постоянной величиной (возможно иной). Также могут быть произведены более сложные вычисления, при которых вычисляют множество значений Rx и Ry поправок на наклон для различных участков полупроводниковой пластины, и при экспонировании каждого участка стол для полупроводниковых пластин регулируют соответствующим образом.
Во время экспонирования наклон стола для полупроводниковых пластин в направлениях x и y регулируют согласно вычисленным значениям Rx и Ry поправок на наклон. Это может быть осуществлено, например, с использованием сигналов интерферометра для обратной связи по положению и наклону стола для полупроводниковых пластин. В этом случае для генерации данных только о направлении z, то есть о расстоянии между проекционным объективом и поверхностью полупроводниковой пластины, могут использоваться датчики уровня.
Эта процедура отличается от описанного выше способа измерения на действующем оборудовании и способа предварительного составления карты полупроводниковой пластины, в котором измеряют расстояние до полупроводниковой пластины в направлении z в различных местах, исходя из которого вычисляют общий наклон поверхности полупроводниковой пластины в направлениях x и y. Затем стол для полупроводниковых пластин регулируют так, чтобы оптимально скорректировать любой такой наклон перед экспонированием, чтобы во время сканирования полупроводниковой пластины к проекционной головке номинально параллельная поверхность полупроводниковой пластины подавалась перпендикулярно оптической оси литографической колонки. Во время сканирования может быть использована вычисленная карта высот поверхности полупроводниковой пластины для адаптации к отклонению в z-направлении, то есть к изменению расстояния между проекционным объективом и поверхностью полупроводниковой пластины. Значения в направлении z могут быть найдены непосредственно из ранее определенной карты высот или с использованием интерполяции между измеренными значениями.
Изобретение было описано путем ссылки на некоторые рассмотренные выше варианты его осуществления. Следует отметить следующее: для специалистов в данной области техники понятно, что выше были описаны различные конструкции и альтернативные варианты, которые могут использоваться в любом из описанных здесь вариантов осуществления изобретения. Кроме того, понятно, что возможны различные видоизменения и альтернативные варианты этих вариантов осуществления изобретения, которые являются хорошо известными для специалистов в данной области техники, не выходя за пределы сущности и объема изобретения. Соответственно, несмотря на то что выше были описаны конкретные варианты осуществления изобретения, они приведены только лишь в качестве примеров и не ограничивают объем настоящего изобретения, определяемый прилагаемой формулой изобретения.
Реферат
Изобретение предназначено для использования в производстве полупроводниковых приборов, в частности для экспонирования рисунков на полупроводниковые пластины и иные мишени. Литографическая машина содержит систему (132) проекционного объектива для фокусировки одного или более экспонирующих пучков на мишень, подвижный стол (134) для транспортировки мишени (9), емкостную измерительную систему (300) для проведения измерений, связанных с расстоянием между последним фокусирующим элементом системы (104) проекционного объектива и поверхностью мишени (9), и блок управления (400) для управления перемещением подвижного стола (134) для регулировки положения мишени (9), по меньшей мере частично, на основании сигнала из емкостной измерительной системы. Емкостная измерительная система (300) содержит множество емкостных датчиков (30), каждый из которых содержит тонкопленочную структуру. Емкостные датчики и последний фокусирующий элемент (104) системы проекционного объектива установлены непосредственно на общем основании (112), и датчики расположены в непосредственной близости к краю последнего фокусирующего элемента системы проекционного объектива. Предложенное техническое решение обеспечивает повышение разрешающей способности и точности литографической машины. 15 з.п. ф-лы, 32 ил.
Формула
систему (132) проекционного объектива для фокусировки одного или более экспонирующих пучков на мишень;
подвижный стол (134) для транспортировки мишени (9);
емкостную измерительную систему (300) для проведения измерений, связанных с расстоянием между последним фокусирующим элементом (104) системы проекционного объектива и поверхностью мишени (9); и
блок (400) управления для управления перемещением подвижного стола (134), чтобы регулировать положение мишени (9), по меньшей мере частично, на основании сигнала из емкостной измерительной системы,
причем емкостная измерительная система (300) содержит множество емкостных датчиков (30), каждый из которых содержит тонкопленочную структуру, содержащую измерительный электрод и задний охранный электрод, при этом тонкопленочная структура является гибкой,
причем емкостные датчики и последний фокусирующий элемент (104) системы проекционного объектива установлены непосредственно на общем основании (112), и
причем упомянутые датчики расположены в непосредственной близости к краю последнего фокусирующего элемента системы проекционного объектива.
причем гибкий изолирующий слой основы включает в себя продолженные участки, функционирующие как удлиненные соединительные элементы для соединения конструкции гибкой печатной платы с соединителем, и
причем токопроводящие дорожки напечатаны или прикреплены на соединительных элементах, при этом токопроводящие дорожки электрически соединены с измерительными электродами и задними охранными электродами множества датчиков на одном конце и с соединителем на другом конце.
- первую проводящую пленку, содержащую измерительный электрод и первую из токопроводящих дорожек;
- вторую проводящую пленку, содержащую задний охранный электрод и вторую из токопроводящих дорожек;
- третью проводящую пленку, содержащую третью из токопроводящих дорожек,
причем первая проводящая пленка размещена между второй проводящей пленкой и третьей проводящей пленкой, при этом упомянутые проводящие пленки отделены изолирующими слоями.
- четвертую проводящую пленку, содержащую экранирующий электрод и четвертую из токопроводящих дорожек, и
- пятую проводящую пленку, содержащую пятую из токопроводящих дорожек, при этом пятая проводящая пленка электрически соединена с четвертой проводящей пленкой,
причем вторая проводящая пленка размещена между четвертой проводящей пленкой и первой проводящей пленкой, и третья проводящая пленка размещена между пятой проводящей пленкой и первой проводящей пленкой, при этом упомянутые проводящие пленки отделены изолирующими слоями.
Комментарии