Схемное устройство и способ измерения дрожания тактового сигнала - RU2451391C2
Код документа: RU2451391C2
Чертежи






Описание
Область техники
Настоящее изобретение, в общем, связано со схемными устройствами и способами измерения дрожания тактового сигнала.
Уровень техники
В общем, временная стабильность тактового сигнала в рамках схемного устройства может оказывать влияние на производительность, в частности, в синхронных цифровых схемных устройствах. Кратковременные колебания тактового сигнала или дрожание тактового сигнала могут снижать производительность системы вследствие опасности нарушений временных ограничений. Дрожание тактового сигнала вводит параметрическое ограничение выхода в схемных устройствах, поскольку дрожание тактового сигнала затрагивает максимальную частоту, на которой могут работать основные процессоры. Традиционно, может быть трудным точно измерять уменьшение частоты процессора, в частности, поскольку вставка измерительных точек также может возмущать тактовый сигнал. Например, измерение дрожания тактового сигнала внешних измерительных датчиков может возмущать тактовый сигнал за счет появления несовпадений емкостей, индуктивности, полного сопротивления и других аномалий, которые могут вводить дополнительные колебания тактового сигнала.
Чтобы более точно измерять дрожание тактового сигнала, тестовые структуры на микросхеме добавлены в схемные устройства. Тестовые структуры на микросхеме могут включать в себя большое число триггеров, чтобы фиксировать значение тактового сигнала во множестве точек дискретизации вдоль цепи задержки. Тем не менее, чтобы точно дискретизировать тактовый сигнал, большое число точек дискретизации и, как следствие, большое число триггеров используется. Большое число триггеров может занимать значительную площадь всей схемы. Дополнительно, точность, ассоциированная с такими тестовыми структурами, типично ограничена задержкой вставки каждого элемента цепи задержки. Например, если каждый элемент в цепи задержки имеет задержку в 20 пикосекунд, точность измерений, проводимых между элементами в цепи задержки, может ограничиваться рамками плюс или минус 20 пикосекунд. В схемах процессоров, которые работают на частотах выше одного гигагерца, допустимый запас задержки в 40 пикосекунд может представлять значительную величину неопределенности в обнаруженном дрожании тактового сигнала, которая может быть разрешена посредством добавления допустимого рабочего запаса, который превышает обнаруженный допустимый запас на неопределенность дрожания тактового сигнала. Этот допустимый рабочий запас ограничивает частоту, на которой может работать схемное устройство.
Дополнительно, после того как дрожание тактового сигнала в конкретной схемной конструкции измерено, остается трудным определять то, может ли изменение схемы уменьшать дрожание. В то время как чрезмерный допустимый запас на дрожание может увеличивать использование площади подложки схемы, повышать потребляемую мощность и увеличивать время вывода на рынок конкретной схемы, недостаточный допустимый запас на дрожание может приводить к снижению качества и увеличению числа сбоев или уменьшению выхода. Следовательно, есть потребность в улучшенных схемных устройствах и способах измерения дрожания тактового сигнала.
Сущность изобретения
В конкретном варианте осуществления раскрыт способ, который включает в себя отправку тактового сигнала вдоль цепи задержки схемного устройства и определение значения тактового сигнала в выбранной точке в цепи задержки. Способ также включает в себя регулирование местоположения выбранной точки, когда значение не указывает обнаружение требуемой части тактового сигнала.
В другом конкретном варианте осуществления раскрыто схемное устройство, которое включает в себя цепь задержки, состоящую из множества элементов задержки. Цепь задержки чувствительна к тактовому сигналу. Схемное устройство также включает в себя логическую схему и схему иерархического мультиплексора с множественными входами, чувствительными к цепи задержки. Логическая схема управляет иерархическим мультиплексором так, чтобы определять значение тактового сигнала в выбранной точке в цепи задержки и регулировать выбранную точку, когда значение не указывает фронт тактового сигнала.
В еще одном другом конкретном варианте осуществления раскрыт способ, который включает в себя прием тактового сигнала в цепи задержки схемного устройства и определение местоположения фронта тактового сигнала в цепи задержки, чтобы определять тактовый интервал. Определение местоположения фронта тактового сигнала включает в себя итеративное определение значения тактового сигнала в выбранной точке в цепи задержки и регулирование выбранной точки до тех пор, пока значение не указывает фронт тактового сигнала. Способ также включает в себя сравнение местоположения фронта тактового сигнала с местоположением фронта номинального тактового сигнала для того, чтобы определять измерение дрожания тактового сигнала.
В еще одном конкретном варианте осуществления раскрыто устройство процессора, которое включает в себя средство для прохождения тактового сигнала вдоль цепи задержки схемного устройства и средство для определения значения тактового сигнала в выбранной точке. Устройство процессора также включает в себя средство для регулирования выбранной точки, когда значение не указывает фронт тактового сигнала.
Одно конкретное преимущество, предоставляемое посредством вариантов осуществления схемы определения дрожания тактового сигнала, заключается в том, что схема определения дрожания тактового сигнала достигает высокой точности в определении дрожания тактового сигнала, давая возможность проектировщикам задавать меньший допустимый запас на дрожание тактового сигнала, чтобы повышать рабочие тактовые частоты для схемных устройств.
Другое конкретное преимущество заключается в том, что схема определения дрожания тактового сигнала занимает меньшую площадь всей схемы и потребляет меньше рабочей мощности, чем схемы компенсации дрожания и/или традиционные схемы определения дрожания тактового сигнала.
Еще одно конкретное преимущество заключается в том, что схема определения дрожания тактового сигнала выполнена с возможностью измерения дрожания в течение длительных периодов времени в ядрах процессоров, которые выполняют различные приложения.
Другое конкретное преимущество заключается в том, что схема определения дрожания тактового сигнала может работать без калибровки.
Другое преимущество реализовано в том, что схема определения дрожания тактового сигнала не требует аналоговых схемных компонентов.
Другие аспекты, преимущества и признаки настоящего изобретения должны стать очевидными из прочтения всей заявки, включающей в себя следующие разделы: "Краткое описание чертежей", "Подробное описание изобретения" и "Формула изобретения".
Краткое описание чертежей
Фиг.1 является графиком, иллюстрирующим тактовый сигнал, который включает в себя неопределенность синхронизации вследствие дрожания;
Фиг.2 является блок-схемой конкретного иллюстративного варианта осуществления схемы для того, чтобы измерять дрожание тактового сигнала;
Фиг.3 является блок-схемой конкретного иллюстративного варианта осуществления схемного устройства, включающего в себя схему для того, чтобы измерять дрожание тактового сигнала;
Фиг.4 является временным графиком, иллюстрирующим обнаружение фронта тактового сигнала с использованием схем, показанных на фиг.2 и 3;
Фиг.5 является временным графиком, иллюстрирующим обнаружение фронта тактового сигнала с использованием схем, показанных на фиг.2 и 3, после регулирования синхронизации тактового сигнала на известную задержку;
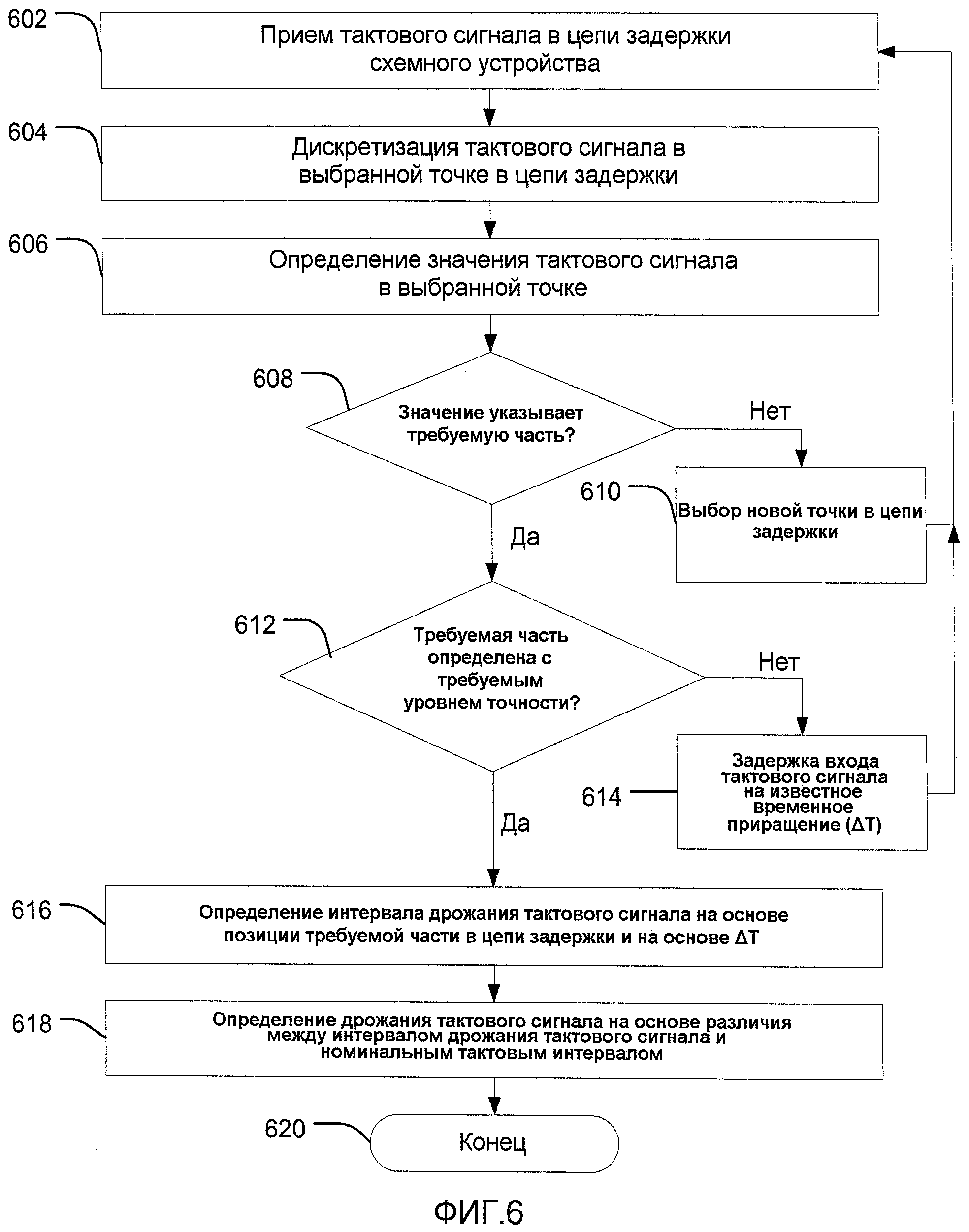
Фиг.6 является блок-схемой последовательности операций конкретного иллюстративного варианта осуществления способа измерения дрожания тактового сигнала;
Фиг.7 является блок-схемой последовательности операций конкретного иллюстративного варианта осуществления способа управления рабочим тактовым сигналом схемного устройства на основе измеренного дрожания тактового сигнала; и
Фиг.8 является блок-схемой конкретного иллюстративного варианта осуществления портативного устройства связи, включающего в себя схему для измерения дрожания тактового сигнала.
Подробное описание
Фиг.1 является графиком 100, иллюстрирующим тактовый сигнал 102, который включает в себя неопределенность синхронизации вследствие дрожания. График 100 включает в себя ось X, представляющую время, и ось Y, представляющую логический уровень или уровень напряжения. Следует понимать, что временная ось может указывать время в единицах задержки в схеме, в единицах абсолютного времени (таких как наносекунды), других единицах или в любой комбинации вышеозначенного. Тактовый сигнал 102 имеет номинальный тактовый интервал 106 и имеет обнаруженный тактовый интервал с дрожанием 108. В общем, дрожание тактового сигнала - это искажение в тактовом цикле и разности фаз, накапливаемое со временем, так что фронт тактового сигнала (передний фронт, задний фронт или и то, и другое) может искажаться или может наступать раньше или позже относительно ожидаемого номинального фронта тактового сигнала. Ранние передние фронты тактового сигнала, вызываемые посредством дрожания, в общем, указываются посредством ссылок с номерами 104 и 112, а задержанный фронт тактового сигнала, в общем, указывается посредством ссылки с номером 110.
В общем, тактовый сигнал 102 может включать в себя несколько потенциальных переходов от логического низкого уровня к логическому высокому уровню, как, в общем, указывается посредством линии 104 и линии 110. Тактовый сигнал 102 также включает в себя переход от логического высокого уровня к логическому низкому уровню. Помимо этого, последующий переход от логического низкого уровня к логическому высокому уровню показывается в 112. Хотя тактовый сигнал 102 может иметь номинальный тактовый интервал 106, фактический тактовый интервал может варьироваться в зависимости от различных потенциальных переходов фронта и задержек, ассоциированных с такими переходами (т.е. на основе дрожания). В этом случае, обнаруженный тактовый интервал с дрожанием 108 представляет дрожание тактового сигнала наихудшего случая, когда обнаруженный тактовый интервал меньше номинального тактового интервала, что, в традиционных системах, может приводить к ошибкам при передаче данных вследствие дрожания тактового сигнала, если проектировщик не включил допустимый запас рабочего тактового сигнала так, чтобы учитывать такое дрожание тактового сигнала.
В общем, дрожание, описанное относительно фиг.1, связано с различием между ожидаемым номинальным тактовым интервалом (от переднего фронта первого номинального тактового импульса до переднего фронта следующего номинального тактового импульса) и определенным тактовым интервалом (от переднего фронта принимаемого тактового импульса до переднего фронта следующего принимаемого тактового импульса). Тем не менее, следует понимать, что значение дрожания тактового сигнала также может быть определено из задних фронтов тактового сигнала или из выбранных частей тактового сигнала.
Ссылаясь на фиг.2, блок-схема конкретного иллюстративного варианта осуществления схемного устройства 200, которое может использоваться для того, чтобы измерять дрожание тактового сигнала посредством определения тактового интервала и сравнения тактового интервала с ожидаемым номинальным тактовым интервалом. Схемное устройство 200 включает в себя вход 202 тактового сигнала, элемент 204 переменной задержки и цепь 206 задержки. Цепь 206 задержки включает в себя множество элементов задержки, которые могут быть буферами, инверторами, другими элементами задержки или любой комбинацией вышеозначенного. В конкретном варианте осуществления цепь 206 задержки может включать в себя множество последовательно соединенных инверторов, в том числе проиллюстрированные инверторы 238, 240, 242 и 244. Вход 202 тактового сигнала чувствителен к источнику, чтобы принимать тактовый сигнал, который предоставляется в цепь 206 задержки после компенсации через элемент 204 переменной задержки. В общем, последовательная задержка, вводимая посредством каждого из множества последовательно соединенных инверторов цепи задержки, намного меньше номинального тактового интервала (т.е. ожидаемого тактового интервала). В конкретном иллюстративном неограничивающем варианте осуществления номинальный тактовый интервал может составлять 1000 пикосекунд, и каждый инвертор может представлять задержку приблизительно в 20 пикосекунд.
Схемное устройство 200 также включает в себя схему иерархического мультиплексора, которая включает в себя первый уровень одной или более схем мультиплексора, таких как мультиплексоры 208 и 210. Схема иерархического мультиплексора также включает в себя схему 216 мультиплексора второго уровня, которая может использоваться для того, чтобы определять дрожание тактового сигнала посредством дискретизации тактового сигнала в цепи 206 задержки. Дополнительно, схема иерархического мультиплексора может включать в себя логические схемные устройства, такие как один или более защелкивающих элементов 212 и 214. В конкретном иллюстративном варианте осуществления схема иерархического мультиплексора может включать в себя дополнительные уровни схем мультиплексора или логики, такие как мультиплексор 222 и защелкивающий элемент 224.
Схемное устройство 200 также включает в себя контроллер 228 указателя выбора цепи задержки, который управляет иерархическими мультиплексорами. В частности, контроллер 228 указателя выбора цепи задержки управляет мультиплексорами 208 и 210 через линию 232 управления, управляет мультиплексором 216 через линию 234 управления и управляет мультиплексором 222 через линию 236 управления. Схемное устройство 200 дополнительно включает в себя логическую схему 226, которая чувствительна к защелкивающему элементу 224 и которая выполнена с возможностью определять фронт тактового сигнала в точке в цепи 206 задержки.
Логическая схема 226 может предоставлять данные, связанные с тактовым сигналом, на выходе 246. В конкретном иллюстративном варианте осуществления логическая схема 226 может предоставлять на выходе 246 значение или другой индикатор, который может использоваться посредством программного обеспечения или других схем для того, чтобы идентифицировать тактовый интервал принимаемого тактового сигнала в цепи 206 задержки. В конкретном иллюстративном варианте осуществления логическая схема 226 предоставляет регулирование 248 указателя цепи задержки (управляющий сигнал обратной связи) в контроллер 228 указателя выбора цепи задержки. Дополнительно, логическая схема 226 предоставляет сигнал 235 обратной связи для регулирования задержки тактового сигнала в элемент 204 переменной задержки тактового сигнала.
Первый уровень мультиплексоров, такой как мультиплексоры 208 и 210, включает в себя множественные входы, соединенные с различными точками в цепи 206 задержки, и управляется посредством контроллера 228 указателя выбора цепи задержки так, чтобы мультиплексировать значения из соответствующих точек в цепи 206 задержки. Например, мультиплексор 208 может управляться посредством контроллера 228 указателя выбора цепи задержки через линию 232 управления, чтобы мультиплексировать (дискретизировать) значение тактового сигнала в точке между элементами 238 и 240 задержки. Мультиплексор 210 также может управляться посредством контроллера 228 указателя выбора цепи задержки через линию 232 управления, чтобы дискретизировать значение тактового сигнала в точке между элементами 242 и 244 задержки в цепи 206 задержки. Мультиплексор 208 предоставляет дискретизированное значение в защелкивающий элемент 212, а мультиплексор 210 предоставляет дискретизированное значение в защелкивающий элемент 214.
В общем, каждый из последовательно соединенных инверторов (буферов или других элементов задержки) цепи 206 задержки выполняет функцию элемента задержки, и каждый из них имеет заранее определенную номинальную задержку, ассоциированную с данными, проходящими через инвертор. В конкретном иллюстративном неограничивающем варианте осуществления номинальный тактовый интервал может составлять 1000 пикосекунд, и каждый инвертор может представлять задержку приблизительно в 20 пикосекунд. Используя цепь 206 задержки для того, чтобы измерять дрожание тактового сигнала, задержка, представленная посредством каждого инвертора, определяет степень детализации измерения (т.е. допустимый запас на ошибку для данной выборки). Например, в конкретном иллюстративном варианте осуществления измерения, проводимые между двумя элементами задержки, известны с точностью приблизительно плюс или минус 20 пикосекунд (т.е. с допустимым запасом на ошибку приблизительно в 40 пикосекунд). Переменная задержка 204 тактового сигнала может управляться посредством логической схемы 226 через сигнал 235 обратной связи для регулирования задержки тактового сигнала, чтобы вставлять известное временное смещение в тактовый сигнал на входе цепи 206 задержки, так что разрешение цепи 206 задержки может задаваться более точно для целей определения дрожания тактового сигнала. Например, если точка дискретизации между инверторами 238 и 240 представляет период времени в 40 пикосекунд от начала цепи задержки до точки дискретизации на выходе инвертора 240, переменная задержка 204 тактового сигнала может вводить задержку в 5 пикосекунд, которая регулирует полную задержку вставки в точку дискретизации, так что период времени для сигнала, чтобы распространяться в точку дискретизации на выходе инвертора 240, представляет 45 пикосекунд. Таким образом, степень детализации конкретного определения фронта тактового сигнала может повышаться, чтобы более точно определять тактовый интервал.
В конкретном иллюстративном варианте осуществления тактовый сигнал, принимаемый на входе 202 тактового сигнала, принимается в цепи 206 задержки схемного устройства 200. Контроллер 228 указателя выбора цепи задержки управляет первым уровнем иерархического мультиплексора, таким как мультиплексоры 208 и 210, чтобы дискретизировать точку в цепи 206 задержки. В общем, мультиплексоры 208 и 210 включают в себя множество входов, которые чувствительны к множеству выходов цепи 206 задержки. Каждый из множества выходов цепи 206 задержки соответствует надлежащему выходу одного из элементов задержки, таких как проиллюстрированные инверторы.
Тактовый сигнал дискретизируется в выбранной точке в цепи 206 задержки. Выбранная точка в цепи 206 задержки может представлять фронт тактового сигнала для тактового сигнала, имеющего номинальный или ожидаемый тактовый интервал. Альтернативно, выбранная точка может представлять фронт для тактового сигнала, имеющего тактовый интервал, который превышает номинальный или ожидаемый тактовый интервал. Контроллер 228 указателя выбора цепи задержки управляет мультиплексорами 208 и 210 таким образом, чтобы предоставлять дискретизированные данные в защелкивающие элементы 212 и 214. Следует понимать, что есть множество выходов из первого уровня схемы иерархического мультиплексора, которая предоставляет дискретизированные данные из цепи 206 задержки во множество логических элементов. Дискретизированные данные из множества защелкивающих элементов предоставляются параллельно в мультиплексор второго уровня схемы иерархического мультиплексора, такой как второй мультиплексор 216. Данные могут предоставляться на другой уровень схемы иерархического мультиплексора, представленной посредством инвертора 218 и буфера 220, соединенных параллельно, которые предоставляют дискретизированные данные тактового сигнала в мультиплексор 222. Контроллер 228 указателя выбора цепи задержки может управлять мультиплексором 222 через линию 236 управления, чтобы предоставлять дискретизированные данные тактового сигнала в защелкивающий элемент 224 и логическую схему 226. Логическая схема 226 выполнена с возможностью определять то, обнаружен ли фронт тактового сигнала в точке дискретизации в цепи 206 задержки.
Логическая схема 226 может предоставлять выход, такой как данные, связанные с точкой дискретизации в цепи 206 задержки, через выход 246. Дополнительно, логическая схема 226 может предоставлять регулирование 248 указателя цепи задержки в контроллер 228 указателя выбора цепи задержки, чтобы регулировать точку дискретизации мультиплексоров 208 и 210 так, чтобы дискретизировать другую точку в цепи 206 задержки. В конкретном иллюстративном варианте осуществления точка дискретизации в цепи 206 задержки может указывать тактовый интервал, который меньше номинального тактового интервала, и точка дискретизации может регулироваться посредством выбора другой точки дискретизации в цепи задержки для того, чтобы идентифицировать вторую точку, которая является более ранней в цепи задержки, чем начальная точка. Точка дискретизации в цепи 206 задержки может представлять ожидаемое расстояние вдоль цепи 206 задержки, пройденное посредством фронта тактового сигнала, на основе номинальной тактовой частоты.
В конкретном иллюстративном варианте осуществления, если логическая схема 226 определяет, что фронт тактового сигнала не обнаружен в точке дискретизации в цепи 206 задержки, логическая схема 226 может изменять точку дискретизации так, чтобы дискретизировать в другой точке тактового сигнала, имеющей период, который меньше или превышает ожидаемый тактовый интервал, в зависимости от значения дискретизированных данных. В частности, если передний фронт тактового сигнала не достиг точки дискретизации, логическая схема может предоставлять регулирование 248 указателя цепи задержки, чтобы компенсировать меньший тактовый интервал. Схемное устройство 200 может выполнять процесс повторно посредством управления мультиплексорами 208, 210, 216 и 222 схемы иерархического мультиплексора так, чтобы дискретизировать в отрегулированной точке дискретизации.
После того как логическая схема 226 обнаруживает фронт тактового сигнала в цепи 206 задержки, логическая схема 226 может регулировать переменную задержку 204 тактового сигнала через сигнал обратной связи для регулирования задержки тактового сигнала, чтобы регулировать входной тактовый сигнал на известное временное приращение, так что тактовый сигнал проходит в цепи 206 задержки в отрегулированное время (т.е. T0+ΔT), где T0 представляет задержку на распространение/вставку от начала цепи 206 задержки в точку дискретизации в цепи 206 задержки до того, как входной тактовый сигнал отрегулирован. Контроллер 228 указателя выбора цепи задержки может повторно дискретизировать тактовый сигнал в точке дискретизации в цепи 206 задержки, чтобы более точно определять фронт тактового сигнала.
Элемент 204 переменной задержки тактового сигнала соединен с входом цепи 206 задержки, чтобы сдвигать принимаемый тактовый сигнал на известное временное приращение с высокой точностью, чтобы изменять время, в которое тактовый сигнал принимается в цепи 206 задержки. Посредством регулирования переменной задержки 204 тактового сигнала степень детализации цепи 206 задержки фактически повышается или возрастает. Переменная задержка 204 тактового сигнала тем самым предоставляет механизм для схемного устройства 200, чтобы предоставлять небольшие точные регулирования тактового сигнала во время процесса обнаружения фронта тактового сигнала. В частности, входной тактовый сигнал может регулироваться на приращение, которое меньше задержки, вводимой посредством каждого элемента задержки в цепи 206 задержки. Например, если каждый элемент задержки, такой как инвертор 238, вводит задержку в 20 пикосекунд, элемент 204 переменной задержки тактового сигнала может вводить задержку в 5 пикосекунд (задержку, имеющую известное временное приращение), чтобы определять то, помещен ли фронт тактового сигнала в следующую точку дискретизации в цепи задержки, уменьшая допустимый запас на ошибку в обнаружении фронта тактового сигнала до плюс или минус 5 пикосекунд без необходимости добавлять дополнительные точки дискретизации. Хотя описывается задержка в 5 пикосекунд, следует понимать, что другие временные приращения также могут использоваться.
Таким образом, логическая схема 226 посредством предоставления регулирования 248 указателя цепи задержки может дискретизировать различные точки в цепи 206 задержки и может управлять контроллером 228 указателя выбора цепи задержки так, чтобы предоставлять итеративное регулирование иерархических мультиплексоров, чтобы дискретизировать различные точки вдоль цепи задержки. Итеративно отрегулированные выборки принимаемого тактового сигнала могут использоваться для того, чтобы обнаруживать первый сигнал фронта тактового сигнала, так что фронт тактового сигнала обнаруживается таким образом, чтобы учитывать дрожание (т.е. колебания в синхронизации фронта тактового сигнала).
Логическая схема 226 необязательно может уточнять обнаружение фронта посредством предоставления сигнала 235 обратной связи для регулирования задержки тактового сигнала, чтобы регулировать переменную задержку 204 тактового сигнала. Логическая схема 226 может использовать отрегулированный тактовый сигнал для того, чтобы более точно определять переход тактового сигнала. Например, логическая схема 226 может регулировать переменную задержку 204 тактового сигнала на первую часть времени задержки (т.е. часть задержки, вводимой посредством каждого элемента задержки в цепи 206 задержки). Логическая схема 226 затем может повторно дискретизировать отрегулированный тактовый сигнал, чтобы обнаруживать фронт тактового сигнала. Если обнаруженный фронт тактового сигнала по-прежнему имеет неопределенность в измерении, которая превышает пороговую неопределенность, логическая схема может регулировать переменную задержку 204 тактового сигнала на вторую часть, которая меньше первой части. Логическая схема 226 может итеративно регулировать переменную задержку 204 тактового сигнала до тех пор, пока фронт тактового сигнала не определен с требуемым уровнем точности.
Во время последней итерации логическая схема 226 может предоставлять выход 246, указывающий, что фронт тактового сигнала обнаружен с требуемым уровнем точности. В конкретном иллюстративном варианте осуществления логическая схема 226 может предоставлять управляющий сигнал, указывающий наименьший обнаруженный тактовый интервал, на основе дрожания тактового сигнала. Наименьший обнаруженный тактовый интервал может указывать тактовый интервал наихудшего случая. Дополнительные схемные элементы могут использовать такую информацию для того, чтобы выполнять полезные функции, к примеру регулировать частоту рабочего тактового сигнала или регулировать напряжение схемы. Например, может быть предусмотрена адаптивная схема управления напряжением и частотой, которая может использовать обнаруженный тактовый интервал для того, чтобы регулировать тактовую частоту или напряжение. Такие регулирования частоты или напряжения могут использоваться для того, чтобы предоставлять более точную синхронизацию, и тем самым могут давать возможность настройки результирующей схемы для повышения производительности, энергосбережения или любой комбинации вышеозначенного.
В общем, следует понимать, что первый уровень мультиплексоров (к примеру, мультиплексоры 208 и 210) в рамках схемы иерархического мультиплексора может реализовываться с использованием множества мультиплексоров, имеющих приблизительно равные числа входов, которые соединены с множеством различных точек в цепи 206 задержки. В конкретном иллюстративном варианте осуществления посредством использования приблизительно равного числа входов для каждого мультиплексора первого уровня мультиплексоров задержка через первый уровень мультиплексоров (т.е. мультиплексоры 208 и 210) может быть сбалансирована. В конкретном варианте осуществления, мультиплексоры могут быть мультиплексорами "восемь-к-одному", и шестнадцать мультиплексоров могут использоваться для того, чтобы дискретизировать 128 точек в цепи 206 задержки. В другом конкретном варианте осуществления большее число мультиплексоров может использоваться для того, чтобы дискретизировать большее число точек в цепи задержки. Дополнительно, следует понимать, что хотя один мультиплексор второго уровня 216 показан, второй уровень мультиплексоров может включать в себя один или более компонентов мультиплексора. В конкретном иллюстративном варианте осуществления схема иерархического мультиплексора может включать в себя несколько уровней мультиплексоров.
В общем, в зависимости от конкретной реализации, время поступления сигнала точки дискретизации может первоначально выбираться так, чтобы превышать, равняться или быть меньше номинального тактового интервала. Точка дискретизации в цепи 206 задержки может выбираться на основе ожидаемого времени поступления сигнала точки дискретизации. На основе принимаемого тактового сигнала другие точки дискретизации могут итеративно выбираться (раньше или позже в цепи 206 задержки) до тех пор, пока требуемая часть принимаемого тактового сигнала не обнаружена в конкретной точке дискретизации. В конкретном иллюстративном варианте осуществления требуемая часть принимаемого тактового сигнала может быть передним фронтом тактового сигнала. В другом конкретном иллюстративном варианте осуществления требуемая часть принимаемого тактового сигнала может быть задним фронтом. В еще одном другом конкретном иллюстративном варианте осуществления требуемая часть тактового сигнала может быть частью уровня. В этом конкретном случае множество точек дискретизации может использоваться, например, для того, чтобы определять ширину импульса части уровня тактового сигнала. В любом случае значение дрожания тактового сигнала может быть определено на основе отклонения требуемой части принимаемого тактового сигнала от соответствующей требуемой части номинального тактового сигнала.
В конкретном иллюстративном варианте осуществления схемное устройство 200 может использоваться для того, чтобы измерять дрожание тактового сигнала в относительных единицах задержки в схеме. В конкретном иллюстративном варианте осуществления может быть определен минимальный тактовый интервал. В другом конкретном иллюстративном варианте осуществления схемное устройство 200 может использоваться для того, чтобы отслеживать варьирования тактового сигнала в относительных единицах задержки в схеме, а не в единицах времени. Тем не менее, может быть использована логика для того, чтобы преобразовывать измеренную задержку в схеме в единицы времени через калибровку.
Дополнительно, хотя пояснение по фиг.2 указывает иерархическую компоновку мультиплексоров для дискретизации тактового сигнала, следует понимать, что имеется множество различных конфигураций схем, которые могут использоваться для того, чтобы дискретизировать тактовый сигнал. Например, мультиплексоры 208 и 210 могут заменяться одним мультиплексором, имеющим число входов, которое соответствует числу точек дискретизации в цепи 206 задержки.
Ссылаясь на фиг.3, показана система 300, которая включает в себя схемное устройство 302. Схемное устройство 302 включает в себя схему 306 синхронизации, схему 312 управления тактовым сигналом, логическую схему 310, схему 304 тестирования дрожания тактового сигнала, схему 314 управления мощностью, схему 316 питания и другие схемные элементы 308. В конкретном варианте осуществления схема 304 тестирования дрожания тактового сигнала может быть аналогичной, соответственно, схеме 200 тестирования дрожания тактового сигнала, проиллюстрированной на фиг.2. Схема 306 синхронизации чувствительна к схеме 312 управления тактовым сигналом и может предоставлять выход (такой как тактовый сигнал) в другие схемные элементы 308. Схема 304 тестирования дрожания тактового сигнала может быть соединена с выходом схемы 306 синхронизации, чтобы тестировать тактовый сигнал с тем, чтобы определять тактовый интервал. Схема 304 тестирования дрожания тактового сигнала предоставляет выход в логическую схему 310, который может определять то, совпадает ли тактовый интервал тактового сигнала из схемы 306 синхронизации с ожидаемым значением. Когда фронт тактового сигнала не обнаружен или если фронт тактового сигнала не принят в ожидаемое время, логическая схема 310 может регулировать точку дискретизации в рамках схемы 304 тестирования дрожания тактового сигнала, чтобы измерять тактовый интервал, который включает в себя дрожание тактового сигнала.
После того как логическая схема 310 обнаруживает измеренный тактовый интервал, логическая схема 310 может регулировать схему 312 управления тактовым сигналом так, чтобы управлять схемой 306 синхронизации. Логическая схема 310 может предоставлять первый выход в схему 312 управления тактовым сигналом и второй выход в схему 314 управления мощностью. В конкретном варианте осуществления логическая схема 310 предоставляет сигнал регулирования в схему 312 управления тактовым сигналом, чтобы управлять схемой 306 синхронизации. Логическая схема 310 также может предоставлять информацию, связанную с обнаруженным тактовым интервалом после выполнения измерения тестовой схемой дрожания тактового сигнала, в схему 314 управления мощностью, которая может использовать обнаруженную информацию тактового интервала из логической схемы 310 для того, чтобы предоставлять управляющий сигнал в схему 316 питания. В конкретном иллюстративном варианте осуществления логическая схема 310 может предоставлять информацию, связанную с тактовым интервалом, в схему 314 управления мощностью, которая может использовать эту информацию для того, чтобы управлять схемой 316 питания, и отрегулированная мощность или другой управляющий сигнал может предоставляться в другие схемные элементы 308 в рамках системы, к примеру в устройство типа "система на микросхеме" (SOC).
В конкретном иллюстративном неограничивающем варианте осуществления логическая схема 310 может предоставлять информацию, связанную с измеренным тактовым интервалом, в схему 314 управления мощностью. Схема 314 управления мощностью может использовать эту информацию, например, для того чтобы регулировать мощность в других схемных элементах 308. Альтернативно, схема 314 управления мощностью может предоставлять дополнительную мощность схеме 312 управления тактовым сигналом, схеме 306 синхронизации или любой комбинации вышеозначенного (связь не показана), чтобы предоставлять дополнительную мощность схеме 306 синхронизации, чтобы потенциально уменьшать дрожание тактового сигнала.
Ссылаясь на фиг.4, показана часть характерного тактового сигнала 400. Тактовый сигнал 400 имеет высокий логический уровень на 402 и переходит к низкому логическому уровню, начиная с 406. Тактовый сигнал 400 показывается на сетке, которая иллюстрирует множество точек дискретизации, взятых между элементами задержки, которые представляют задержку, такую как задержка 404. Точка 406 перехода тактового сигнала 400 возникает внутри окна между точками дискретизации, как указано на 408. Поскольку переход 406 возникает между точками дискретизации, как показано, точность дискретизированной точки перехода известна в пределах допустимого запаса, который задается посредством окна 408 дискретизации.
Ссылаясь на фиг.5, тактовый сигнал может быть задержан с использованием элемента переменной задержки, такого как переменная задержка 204 тактового сигнала на фиг.2, чтобы предоставлять задержанную версию тактового сигнала 500. В частности, элемент переменной задержки может вставлять известное временное смещение в тактовый сигнал на входе цепи задержки. Задержанный тактовый сигнал 500 может быть задержан на временное приращение (временное смещение), которое точно известно. Как показано на фиг.5, задержанный тактовый сигнал 500 является задержанной версией тактового сигнала 400 (на фиг.4), который задержан на временное приращение (ΔT), указанное на 506, так что точка перехода от высокого логического уровня 502 к низкому логическому уровню задержанного тактового сигнала 500 возникает в точке 508, которая соответствует точке 510 дискретизации. Посредством вставки точного временного смещения переход точки 508 фронта тактового сигнала может быть определен с большей степенью точности, чем элементы задержки в цепи задержки (такой как цепь 206 задержки на фиг.2) могут обеспечивать в противном случае.
Ссылаясь на фиг.6, проиллюстрирован способ обнаружения тактового интервала и определения дрожания тактового сигнала, к примеру, через использование схемного устройства на фиг.2. Способ включает в себя прием тактового сигнала в цепи задержки схемного устройства, как показано на этапе 602. В конкретном иллюстративном варианте осуществления схемное устройство может включать в себя формирователь тактового сигнала, который отправляет тактовый сигнал в цепь задержки. Способ дополнительно включает в себя дискретизацию тактового сигнала в выбранной точке в цепи задержки на этапе 604 и определение значения тактового сигнала в выбранной точке, как показано на этапе 606. В конкретном иллюстративном варианте осуществления выбранная точка - это точка дискретизации в цепи задержки. Точка дискретизации может первоначально представлять точку дискретизации в цепи задержки, где требуемая часть ожидаемого номинального тактового сигнала должна обнаруживаться. Требуемая часть может быть передним фронтом, задним фронтом или частью уровня тактового сигнала. В конкретном иллюстративном варианте осуществления этапы, указанные на этапе 604 и 606, могут быть комбинированы. В другом конкретном варианте осуществления значение тактового сигнала в выбранной точке может быть определено посредством вычисления, масштабирования, интерполяции или иной обработки значения тактового сигнала, дискретизированного на этапе 604.
Переходя к этапу 608, значение тактового сигнала в точке дискретизации затем сравнивается, чтобы определять то, представляет ли значение тактового сигнала требуемую часть (к примеру, передний фронт, задний фронт, часть уровня). Если значение тактового сигнала указывает, что требуемая часть обнаружена, то способ переходит к этапу 612. Если значение тактового сигнала указывает, что требуемая часть не обнаружена, то способ переходит к этапу 610, где новая точка дискретизации выбирается в цепи задержки. Способ возвращается к этапу 602, и обработка продолжается. Если, первоначально, значение тактового сигнала указывает, что требуемая часть не обнаружена, как показано на этапе 610, последующая обработка осуществляется в других точках дискретизации в цепи задержки до тех пор, пока требуемая часть тактового сигнала в итоге не обнаружена на этапе 608. Затем способ переходит к этапу 612.
После того как дискретизированное значение указывает, что требуемая часть обнаружена, дискретизированное значение далее сравнивается с требуемым уровнем точности на этапе 612 принятия решения. Если требуемый уровень точности не достигнут, то способ переходит к этапу 614, где вход тактового сигнала задерживается на известное временное приращение (ΔT). После того как вход тактового сигнала задержан на известное временное приращение (ΔT), способ возвращается к этапу 602 для дополнительной обработки.
Когда фронт тактового сигнала определен с требуемым уровнем точности на этапе 612, способ переходит к этапу 616, где тактовый интервал дрожания определяется (т.е. измеряется) на основе позиции фронта тактового сигнала в цепи задержки и на основе известного временного приращения (ΔT). Помимо этого, способ переходит к этапу 618, где дрожание тактового сигнала определяется на основе различия между измеренным тактовым интервалом дрожания и номинальным тактовым интервалом. Способ завершается на этапе 620 после того, как тактовый интервал дрожания и различие между тактовым интервалом дрожания и номинальным тактовым интервалом определены. Таким образом, способ может предоставлять как обнаруженный тактовый интервал дрожания, так и отличие обнаруженного тактового интервала дрожания от номинального тактового интервала, чтобы идентифицировать измерение ошибки дрожания.
Тактовый интервал определяется на основе обнаружения фронта тактового сигнала в выбранной точке цепи задержки. Помимо этого, тактовый интервал определяется в конкретное время (представляющее задержку на распространение/вставку от начала цепи задержки до точки дискретизации в цепи задержки) на основе значения, определенного из конкретной точки в цепи задержки, которая указывает фронт тактового сигнала. Дополнительно, допустимый запас на ошибку, ассоциированный с обнаружением фронта тактового сигнала, известен на основе задержек, вводимых посредством элементов в цепь 206 задержки, и допустимый запас на ошибку может быть сокращен посредством сдвига времени, в которое тактовый сигнал принимается в цепи задержки, на известное временное приращение, например, при помощи высокоточного элемента 204 переменной задержки тактового сигнала, как показано на фиг.2. Помимо этого, чтобы повышать точность, известное временное приращение элемента переменной задержки может быть частью времени задержки одного из инверторов в цепи задержки. Помимо этого, после того как тактовый интервал дрожания и различие между тактовым интервалом дрожания и номинальным тактовым интервалом определены, результирующая информация может использоваться для того, чтобы управлять частотой рабочего тактового сигнала, или может использоваться для того, чтобы управлять напряжением рабочего тактового сигнала или других схемных компонентов.
Для определения дрожания тактового сигнала начальная точка дискретизации может быть точкой в цепи задержки, которая представляет задержку на распространение/вставку, которая превышает номинальный тактовый интервал, при этом номинальный тактовый интервал основан на ожидаемой частоте тактового сигнала. В этом примере регулирование точки выбора включает в себя дискретизацию тактового сигнала в выбранной точке в цепи задержки и итеративное регулирование выбранной точки до тех пор, пока фронт тактового сигнала не обнаружен. В конкретном иллюстративном варианте осуществления логическая схема первоначально выбирает точку в цепи задержки, которая превышает ожидаемый тактовый интервал, и, если фронт тактового сигнала не обнаружен, логика выбирает вторую точку в цепи сканирования и определяет значение тактового сигнала во второй точке. Если фронт тактового сигнала не обнаружен, логика снова регулирует точку дискретизации в цепи сканирования. Таким образом, выбранная точка - это точка в цепи задержки, которая связана с ожидаемым расстоянием, пройденным вдоль цепи задержки посредством фронта тактового сигнала, на основе номинальной тактовой частоты, и такая выбранная точка может итеративно регулироваться до более ранних точек во времени, чтобы обнаруживать фронт перехода тактового сигнала, чтобы выполнять обнаружение дрожания тактового сигнала.
Ссылаясь на фиг.7, в другом иллюстративном варианте осуществления показан способ управления рабочим тактовым сигналом схемы на основе обнаруженного измерения дрожания. Способ включает в себя прием тактового сигнала в цепи задержки схемного устройства, на этапе 702, и определение местоположения фронта тактового сигнала в цепи задержки, чтобы определять тактовый интервал тактового сигнала, на этапе 704. Определение местоположения фронта тактового сигнала включает в себя дискретизацию тактового сигнала в различных точках в цепи задержки до тех пор, пока фронт тактового сигнала не обнаружен. Способ дополнительно включает в себя сравнение местоположения фронта тактового сигнала с местоположением ожидаемого фронта номинального тактового сигнала для того, чтобы определять значение дрожания тактового сигнала, на этапе 706, и управление рабочим тактовым сигналом или рабочим напряжением схемного устройства на основе значения дрожания тактового сигнала, на этапе 708. Способ завершается на этапе 710.
В конкретном иллюстративном варианте осуществления выбранная точка для целей измерения - это точка в цепи задержки, которая превышает точку дискретизации, ассоциированную с номинальным тактовым интервалом. После того как размещение тактового интервала для измерения дрожания определено, напряжение или частота сигнала рабочего тактового сигнала могут регулироваться так, как описано. В конкретном варианте осуществления частота рабочего тактового сигнала может уменьшаться, когда дрожание тактового сигнала превышает заранее определенное пороговое значение. Помимо этого, напряжение рабочего тактового сигнала может повышаться, когда дрожание тактового сигнала превышает заранее определенное пороговое значение. Таким образом, частота и напряжение рабочего тактового сигнала могут регулироваться на основе измеренного дрожания тактового сигнала рабочего тактового сигнала.
Помимо этого, раскрытая система и способ предоставляют средство для определения наименьшего тактового интервала, когда выбранная точка из цепи задержки указывает фронт тактового сигнала, и для определения значения дрожания на основе различия между наименьшим тактовым интервалом и номинальным тактовым интервалом. Помимо этого, раскрытая система предоставляет средство для управления частотой, напряжением или любой их комбинацией для рабочего тактового сигнала на основе измеренного значения дрожания. Примером средства для регулирования выбранной точки является логическая схема, такая как логическая схема 310, проиллюстрированная на фиг.3.
В конкретном иллюстративном варианте осуществления схема тестирования дрожания тактового сигнала, такая как схемы 200 и 304, проиллюстрированные на фиг.2 и 3, может быть использована в ходе процесса изготовления для того, чтобы сортировать схемные устройства в различные двоичные устройства на основе протестированной производительности. Например, схемные устройства, которые указывают высокую величину дрожания на основе различия между обнаруженным тактовым интервалом с дрожанием и номинальным тактовым интервалом, которое превышает пороговое различие, могут быть отсортированы для использования в менее производительных схемных устройствах. Альтернативно, такие устройства могут быть переработаны или утилизированы в зависимости от схемы.
Дополнительно, хотя схема иерархического мультиплексора по фиг.2 иллюстрирует только два уровня компонентов иерархического мультиплексора, может использоваться один или более уровней мультиплексора. В конкретном иллюстративном варианте осуществления используются несколько уровней мультиплексора. Дополнительно, число устройств мультиплексора первого уровня может варьироваться в зависимости от числа точек дискретизации и степени точности. Дополнительно, могут использоваться другие элементы задержки, которые имеют большие или меньшие времена задержки, в зависимости от требуемой степени точности и затрат (как с точки зрения финансовых затрат, так и с точки зрения затрат на использование площади схемы). Дополнительно, варианты осуществления схемы определения дрожания тактового сигнала могут использоваться для того, чтобы определять значение дрожания тактового сигнала с высокой степенью точности посредством регулирования элемента переменной задержки тактового сигнала, такого как переменная задержка 204 тактового сигнала на фиг.2, до тех пор, пока точка перехода фронта тактового сигнала не обнаружена с требуемой степенью точности. Посредством определения дрожания тактового сигнала с таким уровнем точности проектировщики схем могут предусматривать меньший допустимый запас на дрожание тактового сигнала, чтобы повышать рабочие тактовые частоты для схемных устройств.
Дополнительно, поскольку схема обнаружения дрожания тактового сигнала использует мультиплексоры для того, чтобы выборочно дискретизировать цепь задержки, схема обнаружения может занимать относительно небольшую площадь всей схемы без сокращения числа потенциальных точек дискретизации. Хотя традиционные схемы обнаружения дрожания включают в себя отдельные защелкивающие схемы для каждой точки дискретизации, мультиплексоры обеспечивают измерения из выбранных точек дискретизации, которые должны быть защелкнуты, вместо измерений с защелкиванием для каждой точки дискретизации, тем самым сокращая число защелкивающих схем, используемых для того, чтобы измерять дрожание тактового сигнала, и уменьшая площадь схемы, используемой для того, чтобы проводить такие измерения. Дополнительно, схема определения дрожания тактового сигнала может использоваться для того, чтобы регулировать напряжение или частоту рабочего тактового сигнала для данной схемы или для другой схемы, чтобы повышать производительность и экономить мощность тактового сигнала, на основе определения дрожания тактового сигнала.
Вместе с описанными схемными устройствами, способами и системами схема измерения дрожания тактового сигнала может быть использована для того, чтобы измерять тактовый интервал, ассоциированный с принимаемым тактовым сигналом, на основе обнаружения требуемого значения в конкретной точке дискретизации. Различие между ожидаемым номинальным тактовым сигналом и принимаемым тактовым сигналом может быть определено на основе обнаружения. В конкретном иллюстративном варианте осуществления, различие может представлять значение дрожания тактового сигнала, которое может использоваться для того, чтобы регулировать мощность в схеме формирователя тактового сигнала, регулировать мощность в других схемных элементах, изменять частоту тактового сигнала или для любой комбинации вышеозначенного. Следует понимать, что требуемая часть тактового сигнала может быть передним фронтом или задним фронтом тактового сигнала. В конкретном иллюстративном варианте осуществления требуемая часть тактового сигнала может быть частью уровня тактового сигнала. В конкретном иллюстративном варианте осуществления дрожание тактового сигнала может быть определено из ранних фронтов тактового сигнала, поздних фронтов тактового сигнала или любой комбинации вышеозначенного.
Дополнительно, хотя многие из примеров описывают измерения с точки зрения времени, термин "время", при использовании в данном документе, является относительной единицей измерения. В конкретном варианте осуществления время может представляться с точки зрения абсолютного времени (к примеру, секунды, микросекунды, наносекунды, пикосекунды и т.д.). В другом конкретном иллюстративном варианте осуществления время может представляться с точки зрения относительных единиц задержки в схеме. В еще одном другом конкретном иллюстративном варианте осуществления время может указываться с использованием другой единицы измерения. В еще одном конкретном иллюстративном варианте осуществления время может быть вычисленным значением, которое основано на одном или более из абсолютного времени, относительного времени и другой единицы измерения.
Фиг.8 иллюстрирует примерный неограничивающий вариант осуществления портативного устройства связи, которое, в общем, обозначается посредством 800. Портативное устройство 800 связи включает в себя систему 822 на микросхеме, которая включает в себя процессор, такой как процессор 810 цифровых сигналов, имеющий схему 811 определения дрожания тактового сигнала (как описано относительно фиг.2-3 и 6-7). Фиг.8 также показывает контроллер 826 дисплея, который может быть соединен с процессором 810 цифровых сигналов и с дисплеем 828. Кроме того, устройство 830 ввода соединено с процессором 810 цифровых сигналов. Дополнительно, запоминающее устройство 832 соединено с процессором 810 цифровых сигналов. Кодер/декодер (кодек) 834 также может быть соединен с процессором 810 цифровых сигналов. Динамик 836 и микрофон 838 могут быть соединены с кодеком 834.
Фиг.8 также указывает, что беспроводной контроллер 840 может быть соединен с процессором 810 цифровых сигналов и с беспроводной антенной 842. В конкретном варианте осуществления источник 844 питания соединен с системой 822 на микросхеме. Кроме того, в конкретном варианте осуществления, как проиллюстрировано на фиг.8, дисплей 828, устройство 830 ввода, динамик 836, микрофон 838, беспроводная антенна 842 и источник 844 питания являются внешними для системы 822 на микросхеме. Тем не менее, каждый из них соединен с компонентом системы 822 на микросхеме.
В конкретном иллюстративном варианте осуществления схема 811 определения дрожания тактового сигнала может использоваться для того, чтобы отслеживать дрожание тактового сигнала для рабочего тактового сигнала, и может использоваться для того, чтобы динамически регулировать мощность тактового сигнала, потребляемую мощность схемы или частоту рабочего тактового сигнала на основе обнаруженного дрожания. Схема 811 определения дрожания тактового сигнала может использоваться для того, чтобы повышать общую производительность портативного устройства 800 связи. В частности, схема 811 определения дрожания тактового сигнала может формировать информацию дрожания, которая может использоваться посредством схемы управления, такой как схема управления тактовым сигналом (к примеру, схема 312 управления тактовым сигналом, проиллюстрированная на фиг.3), или посредством управляющей логики в рамках DSP 810, для того чтобы увеличивать скорость процессора (т.е. посредством уменьшения допустимого запаса на дрожание тактового сигнала для потерь на ошибки, чтобы обеспечивать повышение производительности), регулировать рабочий тактовый сигнал (т.е., например, посредством небольшого замедления рабочего тактового сигнала для того, чтобы уменьшать дрожание), регулировать потребляемую мощность или для любой комбинации вышеозначенного.
Следует понимать, что, хотя схема 811 определения дрожания тактового сигнала показана в процессоре 810 цифровых сигналов, схема 811 определения дрожания тактового сигнала может быть предусмотрена в других компонентах, включая контроллер 826 дисплея, беспроводной контроллер 840, кодек 834 или любой другой компонент, который выполняет операции, на которые может влиять дрожание тактового сигнала.
Специалисты в данной области техники дополнительно должны принимать во внимание, что различные иллюстративные логические блоки, конфигурации, модули, схемы и этапы алгоритма, описанные в связи с раскрытыми в данном документе вариантами осуществления, могут быть реализованы как электронные аппаратные средства, вычислительное программное обеспечение либо комбинации вышеозначенного. Чтобы понятно проиллюстрировать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные иллюстративные компоненты, блоки, конфигурации, модули, схемы и этапы описаны выше, в общем, на основе их функциональности. Реализована эта функциональность в качестве аппаратных средств или программного обеспечения, зависит от конкретного варианта применения и проектных ограничений, накладываемых на систему в целом. Высококвалифицированные специалисты могут реализовывать описанную функциональность различными способами для каждого конкретного варианта применения, но такие решения по реализации не должны быть интерпретированы как являющиеся отступлением от объема настоящего раскрытия сущности.
Этапы способа или алгоритма, описанные в связи с раскрытыми в данном документе вариантами осуществления, могут быть реализованы непосредственно в аппаратных средствах, в программном модуле, приводимом в исполнение посредством процессора, или в их комбинации. Программный модуль может постоянно размещаться в памяти типа RAM, флэш-памяти, памяти типа ROM, памяти типа PROM, памяти типа EPROM, памяти типа EEPROM, в регистрах, на жестком диске, сменном диске, компакт-диске или любой другой форме носителя хранения данных, известной в данной области техники. Типичный носитель хранения данных соединен с процессором так, что процессор может считывать информацию и записывать информацию на носитель хранения данных. В альтернативном варианте, носитель хранения данных может быть встроен в процессор. Процессор и носитель хранения данных могут постоянно размещаться в ASIC. ASIC может постоянно размещаться в вычислительном устройстве или пользовательском терминале. В альтернативном варианте, процессор и носитель хранения данных могут постоянно размещаться как дискретные компоненты в вычислительном устройстве или пользовательском терминале.
Предшествующее описание раскрытых вариантов осуществления предоставлено для того, чтобы давать возможность любому специалисту в данной области техники создавать или использовать раскрытые варианты осуществления. Различные модификации в этих вариантах осуществления должны быть очевидными для специалистов в данной области техники, а описанные в данном документе общие принципы могут быть применены к другим вариантам осуществления без отступления от сущности и объема раскрытия сущности. Таким образом, настоящее раскрытие сущности не имеет намерение быть ограниченным показанными в данном документе вариантами осуществления, а должно удовлетворять самому широкому возможному объему, согласованному с принципами и новыми признаками, задаваемыми посредством прилагаемой формулы изобретения.
Реферат
Изобретение относится к устройствам и способам измерения дрожания тактового сигнала. В варианте осуществления раскрыт способ, который включает в себя прием тактового сигнала в цепи задержки схемного устройства и определение значения тактового сигнала в выбранной точке в цепи задержки. Способ также включает в себя регулирование выбранной точки, когда значение не указывает обнаружение фронта тактового сигнала. Технический результат - обеспечение точности синхронизации тактового сигнала. 4 н. и 26 з.п. ф-лы, 8 ил.
Формула
принимают тактовый сигнал в цепи задержки схемного устройства;
выбирают точку дискретизации в цепи задержки;
дискретизируют тактовый сигнал в выбранной точке дискретизации;
определяют значение тактового сигнала в выбранной точке дискретизации в цепи задержки;
определяют тактовый интервал, когда значение указывает обнаружение требуемой части тактового сигнала; и
определяют значение дрожания на основе различия между определенным тактовым интервалом и номинальным тактовым интервалом.
определяют допустимый запас на ошибку, ассоциированный с обнаружением требуемой части тактового сигнала; и
сдвигают время, в которое тактовый сигнал принимают в цепи задержки, на известное временное приращение, когда допустимый запас на ошибку превышает пороговое значение ошибки.
определяют второе значение тактового сигнала во второй точке и
регулируют вторую точку, когда второе значение не указывает обнаружение фронта тактового сигнала.
цепь задержки, содержащую множество элементов задержки, причем цепь задержки является чувствительной к тактовому сигналу;
схему иерархического мультиплексора, включающую в себя множество входов, чувствительных к цепи задержки; и
логическую схему, соединенную с иерархическим мультиплексором, выполненную с возможностью управления иерархическим мультиплексором для выбора точки дискретизации в цепи задержки, дискретизации тактового сигнала в выбранной точке дискретизации, определения значения тактового сигнала в выбранной точке дискретизации в цепи задержки, определения тактового интервала, когда значение указывает обнаружение требуемой части тактового сигнала, и определения значения дрожания на основе различия между определенным тактовым интервалом и номинальным тактовым интервалом.
первое множество мультиплексоров, причем каждый мультиплексор из первого множества мультиплексоров включает в себя равное число входов, соединенных с различными точками в цепи задержки, причем каждый мультиплексор из первого множества мультиплексоров включает в себя вход выбора; и,
по меньшей мере, один второй мультиплексор, включающий в себя второе множество входов, соединенных с соответствующими выходами первого множества мультиплексоров, причем, по меньшей мере, один второй мультиплексор включает в себя вход выбора, чувствительный к логической схеме, и имеет выход для предоставления значения, связанного с выбранной точкой дискретизации цепи задержки, в логическую схему.
принимают тактовый сигнал в цепи задержки схемного устройства;
определяют местоположение фронта тактового сигнала в цепи задержки, чтобы определить обнаруженный тактовый интервал тактового сигнала, причем определение местоположения фронта тактового сигнала содержит этапы, на которых:
итеративно определяют значение тактового сигнала в выбранной точке в цепи задержки;
регулируют выбранную точку до тех пор, пока значение не укажет фронт тактового сигнала;
сравнивают местоположение фронта тактового сигнала с местоположением фронта номинального тактового сигнала для того, чтобы определять измерение дрожания тактового сигнала; и
управляют рабочим тактовым сигналом на основе измерения дрожания тактового сигнала.
средство для приема тактового сигнала в цепи задержки схемного устройства;
средство для выбора точки дискретизации в цепи задержки;
средство для дискретизации тактового сигнала в выбранной точке дискретизации;
средство для определения значения тактового сигнала в выбранной точке дискретизации в цепи задержки;
средство для определения тактового интервала, когда значение указывает обнаружение требуемой части тактового сигнала; и
средство для определения значения дрожания на основе различия между определенным тактовым интервалом и номинальным тактовым интервалом.
Комментарии