Радар-детектор - RU2577848C1
Код документа: RU2577848C1
Чертежи

Описание
Заявляемое техническое решение относится к области средств обнаружения, предназначенных для предупреждения водителей и пассажиров автомобилей о контроле скоростного режима или иных нарушений, выявляемых правоохранительными органами.
Все современные радар-детекторы (возможно за исключением некоторых дорогих эксклюзивных моделей) используют практически одинаковые принципы, алгоритмы и схемотехнические решения, работают похожим образом и имеют одинаковые недостатки.
1. Слабая чувствительность на многие современные полицейские радары.
Классическая схема радар-детектора (РД) сделана так, что она хорошо видит только немодулированный сигнал (полицейских радаров с таким сигналом вообще не существует), либо сигнал с большой длительностью импульса. На радарах с короткими импульсами (Robot, Mesta) чувствительность может падать в десятки и сотни раз, вплоть до полной потери чувствительности.
2. Реакция на источники излучения, не являющиеся полицейскими радарами.
Это основная причина, по которой многие вообще не хотят покупать РД. Он пищит на каждую автоматическую дверь, на каждую машину с датчиками слепых зон или активным круиз-контролем. Среди десятков и сотен сработок на все это выделить одну сработку на полицейский радар пользователю практически нереально. Со временем количество таких источников помех будет только расти, отстроиться от них в рамках классической схемы невозможно.
3. Пропуски одиночных выстрелов ручных радаров.
Классический РД сканирует диапазоны поочередно и довольно медленно. Он может пропустить одиночный выстрел, потому что в это время сканировал другой диапазон или другую часть того же диапазона.
4. Необходимость выбора режима работы.
Пользователю предлагается самому найти компромисс между чувствительностью и помехозащищенностью, используя режимы с пониженной чувствительностью, отключение некоторых диапазонов и другие настройки. Считается, что в любых условиях можно подобрать оптимальные настройки. На самом деле это не решение проблем, а только видимость их решения. Обычный пользователь, как правило, не имеет необходимых знаний, чтобы правильно настроить детектор, а помехозащищенность в любом случае достигается за счет значительного снижения чувствительности. Пользователь хочет иметь РД, работающий по принципу "включил и поехал", из настроек ему нужны только громкость звука и яркость дисплея.
Наиболее близким техническим решением, устраняющим ряд указанных выше недостатков, является радар-детектор, описанный в патенте РФ №124404 от 20.01.2013. Данный радар-детектор дополнительно содержит схему обработки сигнала, включающую последовательно соединенные: усилитель, компаратор и логический анализатор, при этом на усилитель подается сигнал промежуточной частоты устройства, а логический анализатор своим первым выходом соединен с компаратором для подачи на него сигнала изменения уровня сравнения, а его второй выход является выходом на средства индикации или процессор обработки и управления устройством, при этом схема обработки сигнала осуществляет детектирование сигнала промежуточной частоты и, по меньшей мере, одну или несколько из следующих операций:
i. последовательное сравнение амплитуды импульсов в детектированном сигнале с программно заданными уровнями;
ii. сравнение периода импульсов в детектированном сигнале с программно заданным периодом;
iii. сравнение длительности импульсов принимаемого сигнала с программно заданной длительностью.
Недостатком данного радара-детектора является недостаточная чувствительность.
Используя сигнатурную фильтрацию сигналов, можно устранить все или почти все вышеперечисленные недостатки.
Можно получить радар-детектор, который:
- будет определять все известные полицейские радары с определением их типа;
- дальность определения не будет зависеть от вида модуляции, а только от мощности сигнала (робот будет виден издалека, возможно даже при установке в спину);
- не будет пропускать одиночные выстрелы;
- не будет реагировать на двери, датчики слепых зон и т.п. (ложные срабатывания, возможно, удастся свести к нулю);
- не будет иметь ненужных пользователю настроек.
Современные полицейские радары.
Все современные полицейские радары по важным для нас особенностям сигнала можно разделить на 2 большие группы.
1. Доплеровские радары.
К ним относятся например КРИС, Бинар, Визир. Измеряют скорость непосредственно по частоте Доплера. Имеют большую длительность излучаемого импульса. По словам инженеров «Симикона», импульс не может быть короче 16 мс, иначе спектр расширяется настолько, что становится сложно выделить частоту Доплера. Могут работать в режиме одиночного выстрела.
2. Недоплеровские радары.
К ним относятся Стрелка, Робот, Места, Кречет, Кордон. Непосредственно по доплеровской частоте скорость не измеряют, а вычисляют ее на основе измерения других параметров (дальность, азимут и т.д.). Излучают короткие импульсы (микросекундные, а Стрелка - даже наносекундные). Могут иметь несколько рабочих частот. Работают в непрерывном режиме, режима одиночных выстрелов не имеют.
Вероятно, в будущем будет развиваться в основном 2-я группа радаров, поскольку они имеют более широкие возможности, могут фиксировать не только превышение скорости, но и множество других нарушений.
Технический результат заявляемого технического решения повышение чувствительности и помехозащищенности.
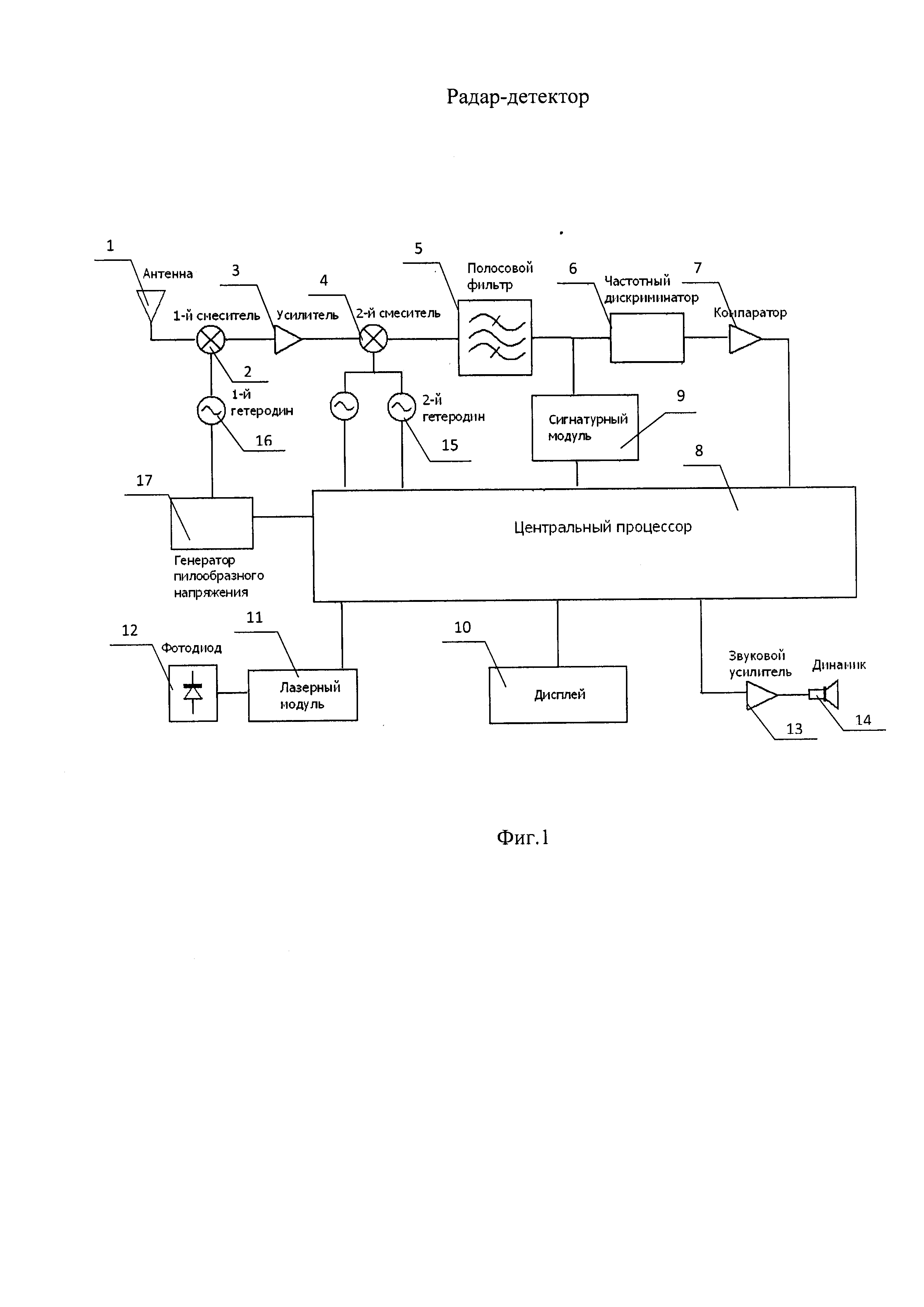
Технический результат достигается тем, что радар-детектор содержит антенну, подключенную к приемнику сигнала, первый смеситель, смешивающий сигнал антенны с сигналом от первого гетеродина, усилитель, второй смеситель, смешивающий усиленный сигнал с сигналом от, по меньшей мере, одного второго гетеродина, полосовой фильтр, сигнатурный модуль и центральный процессор, который выводит информацию об обнаруженных радарах посредством звукового усилителя и динамика, при этом центральный процессор осуществляет управление, по меньшей мере, одним вторым гетеродином и посредством, связанного с ним генератора пилообразного напряжения, первым гетеродином, кроме того, устройство содержит фотодиод и связанный с ним лазерный модуль, сигнал от которого анализируется центральным процессором.
Сигнатурный модуль включает АЦП, цифровой полосовой фильтр, связанный с, по меньшей мере, одним цифровым компаратором, каждый из которых связан с сигнатурным анализатором, а АЦП связан с, по меньшей мере, одним дополнительным цифровым компаратором, каждый из которых также связан с сигнатурным анализатором, при этом сигнатурный анализатор проверяет сигналы на выходе всех компараторов на соответствие известным параметрам излучения радаров, хранимых в нем, и выдает на центральный процессор информацию об обнаруженных радарах и мощности принятого сигнала.
Кроме того, полосовой фильтр может быть связан с частотным дискриминатором и компаратором, выход которого связан с центральным процессором.
Также центральный процессор может дополнительно иметь возможность выводить информацию об обнаруженных радарах на дисплей.
Заявленное техническое решение поясняется следующими фигурами: на фиг. 1 показана общая структурная схема предлагаемого радара-детектора.
На фиг. 2 показана возможная структурная схема сигнатурного модуля.
Устройство, показанное на фиг. 1-2, работает следующим образом. Принятый антенной 1 сигнал поступает на 1-й смеситель 2, где смешивается с сигналом 1-го гетеродина 16 для переноса на 1-ю промежуточную частоту. 1-й гетеродин представляет собой генератор, управляемый напряжением. Его частота меняется в зависимости от управляющего напряжения, поступающего с генератора пилообразного напряжения 17, таким образом, чтобы радар-детектор сканировал весь диапазон частот, в котором могут работать полицейские радары. Затем сигнал 1-й промежуточной частоты через усилитель 3 поступает на 2-й смеситель 4, где смешивается с сигналом 2-го гетеродина 15 для переноса на 2-ю промежуточную частоту. Для сканирования нескольких частотных диапазонов могут использоваться несколько 2-х гетеродинов, которые могут включаться поочередно. Сигнал 2-й промежуточной частоты через полосовой фильтр 5 поступает на сигнатурный модуль 9, который сравнивает параметры принятого сигнала с параметрами сигналов известных полицейских радаров и в случае совпадения выдает на процессор 8 информацию об обнаруженном типе полицейского радара. Также может передаваться информация о мощности принятого сигнала. Центральный процессор обрабатывает полученную информацию и оповещает пользователя об обнаруженных радарах посредством вывода информации на дисплей 10 и звуковыми сигналами, посредством усилителя 13 и динамика 14. Процессор 8 также управляет работой генератора пилообразного напряжения 17 и гетеродинами 15, 16. Цепь, состоящая из частотного дискриминатора 6 и компаратора 7, используется в обычном радар-детекторе для приема любых сигналов в диапазонах частот полицейских радаров, и может быть сохранена в сигнатурном РД для приема радаров с неизвестными параметрами сигнала. Если прием неизвестных радаров не требуется, эта цепь может быть отключена процессором или вовсе отсутствовать. Фотодиод 12 и лазерный модуль 11 предназначены для приема сигналов лазерных измерителей скорости.
На Фиг. 2 показана возможная структурная схема сигнатурного модуля. Очевидно, что для сигнатурного анализа необходимо разделить рабочие частоты, которые находятся достаточно близко друг от друга. Нужен узкополосный фильтр с крутыми срезами АЧХ, с глубоким подавлением за пределами полосы пропускания и достаточно быстродействующий. В таком случае целесообразно использовать цифровой полосовой фильтр 19. Потребуются несколько цифровых компараторов 20 для измерения уровня мощности. Количество компараторов 20 соответствует количеству уровней мощности, отображаемых радар-детектором. Сигнал Стрелки из-за очень широкого спектра на выходе цифрового фильтра, вероятно, будет сильно ослаблен, поэтому для работы со Стрелкой (и другими радарами с наносекундными импульсами, если такие появятся) может потребоваться еще одна группа компараторов 20, подключенных перед фильтром. Сигнатурный анализатор 21 проверяет сигналы на выходе всех компараторов на соответствие известным параметрам излучения радаров (длительность импульса, длительность паузы между импульсами, период повторения импульсов) и выдает на центральный процессор 8 информацию об обнаруженных радарах и мощности принятого сигнала. Цифровой фильтр и все последующие компоненты сигнатурного модуля должны быть достаточно быстродействующими (если не менять вторую промежуточную частоту радара-детектора, то частота дискретизации АЦП 18 должна быть около 40 МГц). Очевидно, что на процессоре, которые обычно используются в радарах-детекторах, такую сигнатурную обработку сигнала реализовать нельзя. Но ее можно реализовать например на ПЛИС FPGA. Сейчас есть достаточно дешевые и защищенные от копирования FPGA чипы, имеющие достаточно ресурсов для реализации всей схемы сигнатурного модуля (за исключением АЦП), например чипы Spartan-3AN фирмы Xilinx.
Алгоритм сканирования.
В России нет и, вероятно, не будет полицейских радаров диапазона Ка. В диапазоне X работает только радар Сокол, снятый с производства в 2008 году. Поэтому, если сканирование разных диапазонов создает проблемы для сигнатурного детектирования, диапазон Ка можно отключить вообще (включать только во время зарубежных поездок), а диапазоны К и X можно сканировать одновременно, если изменить частоту 1-го гетеродина. В детекторах Pilot 21R, Sho-Me G800 и других на таком же приемнике частота 1-го гетеродина подобрана так, что X и К диапазоны принимаются одновременно без переключения 2-го гетеродина. Основное внимание следует сосредоточить на диапазоне К.
Все 4 рабочих частоты находятся ниже нижней границы диапазона К. Нами было проверено несколько радаров Robot SD-580, они все такие. Видимо, для уверенного детектирования всех радаров нужно сканировать диапазон 24.00-24.30 ГГц.
Сигнатурный анализ сигнала возможен при выполнении одного из следующих условий:
Ts Tw>Ton+Toff, где Ton - длительность импульса излучения радара, Toff - длительность паузы между импульсами, Ts - период сканирования всего диапазона, Tw - время нахождения принятого радарного сигнала в полосе пропускания фильтра в процессе сканирования. Поэтому имеем 2 способа сканирования. Быстрое сканирование, когда период сканирования короче длительности самого короткого импульса и самой короткой паузы из всех известных радаров. Длительность импульса радара или паузы между импульсами измеряется путем подсчета количества периодов сканирования, на которых присутствует или отсутствует сигнал на определенной частоте. Медленное сканирование, когда время нахождения сигнала в полосе пропускания больше самого длительного периода повторения импульсов из всех известных радаров. Длительность импульса радара или паузы между импульсами измеряется непосредственно. Очевидно, что медленное сканирование не годится для доплеровских радаров, потому что они могут работать одиночными выстрелами, и они почти наверняка будут пропущены. А быстрое сканирование для недоплеровских радаров практически нереализуемо из-за малых длительностей импульсов. Попытка найти такой период сканирования, чтобы для доплеровских радаров сканирование было быстрым, а для недоплеровских - медленным, также не приводит к положительному результату. Остается воспользоваться тем, что все недоплеровские радары работают постоянно, на каждом периоде сканирования искать такие радары в небольшой части диапазона и чередовать эти части. То есть управляющее напряжение 1-го гетеродина должно меняться примерно пилообразно. Заявленное техническое решение может быть осуществлено с помощью известных в области техники средств и компонентов и соответствует условию "промышленная применимость".
Реферат
Изобретение относится к области средств обнаружения нарушений, выявляемых правоохранительными органами. Достигаемый технический результат - повышение чувствительности и помехозащищенности. Указанный результат достигается за счет того, что радар-детектор содержит антенну, подключенную к приемнику сигнала, первый смеситель, смешивающий сигнал антенны с сигналом от первого гетеродина, усилитель, второй смеситель, смешивающий усиленный сигнал с сигналом от, по меньшей мере, одного второго гетеродина, полосовой фильтр, сигнатурный модуль и центральный процессор, который выводит информацию об обнаруженных радарах посредством звукового усилителя и динамика. При этом центральный процессор осуществляет управление, по меньшей мере, одним вторым гетеродином и, посредством связанного с ним генератора пилообразного напряжения, первым гетеродином. Кроме того, устройство содержит фотодиод и связанный с ним лазерный модуль, сигнал от которого анализируется центральным процессором. 3 з.п. ф-лы, 2 ил.
Формула
.
Документы, цитированные в отчёте о поиске
Способ анализирования данных, полученных от объединенных детекторов радаров
Комментарии