Односторонний емкостной датчик усилия для электронных устройств - RU2454702C1
Код документа: RU2454702C1
Чертежи





Описание
Область техники
Настоящее изобретение относится к емкостным датчикам, в частности к емкостному датчику усилия, в котором применяется установленная на подложке конденсаторная пара, чтобы определять степень контактного усилия.
Уровень техники
Портативные электронные устройства, включающие в себя мобильные телефоны и Персональные Цифровые Секретари (Personal Digital Assistant, PDA), становятся все более изощренными в силу развития технологий, ассоциированных с этими устройствами. Например, до недавнего времени пользовательский интерфейс для мобильного телефона включал в себя от двенадцати до пятнадцати механических кнопок. В настоящее время, однако, множество портативных устройств включают в себя полную QWERTY-клавиатуру. Кроме того, в некоторых портативных электронных устройствах используются чувствительные к касанию экраны, которые вообще не имеют механических клавиш. Вместо нажатия механической кнопки пользователь просто прикасается к пластиковой или стеклянной поверхности. Схемы восприятия касания, такие как емкостные датчики касания, определяют местоположение пальца или стилуса пользователя. Далее, процессор соотносит позицию пальца или стилуса с виртуальной клавиатурой, чтобы определить нажатие клавиши. Такие емкостные датчики описаны, например, в находящейся на одновременном рассмотрении патентной заявке США №11/679,228 "Adaptable User Interface and Mechanism for a Portable Electronic Device", которая была подана 27 февраля 2007 г. и которая включена в состав настоящего документа посредством ссылки.
Хотя емкостные датчики касания полезны для определения геометрического местоположения объектов, таких как пальцы и стилусы, они не предоставляют указание применяемого контактного усилия. Во многих устройствах для детектирования контактного усилия должны использоваться воспринимающие усилие резисторы или переключатели. Тем не менее, когда пользовательский интерфейс содержит только неподвижную стеклянную или пластиковую деталь, воспринимающие усилие резисторы проявляют нежелательные свойства. Например, воспринимающие усилие резисторы имеют как правило нелинейный отклик, который зависит от материала производственных допусков. В добавление, воспринимающие усилие резисторы имеют высокую стоимость, что повышает стоимость всего электронного устройства.
Соответственно, существует необходимость в усовершенствованном, дешевом чувствительном к касанию интерфейсе, который способен детектировать и определять контактное усилие.
Краткое описание чертежей
Фиг.1 - иллюстрация одного примера емкостного датчика усилия согласно вариантам осуществления настоящего изобретения;
Фиг.2 - иллюстрация одного примера рисунка емкостного электрода, подходящего для размещения на подложке, согласно вариантам осуществления настоящего изобретения;
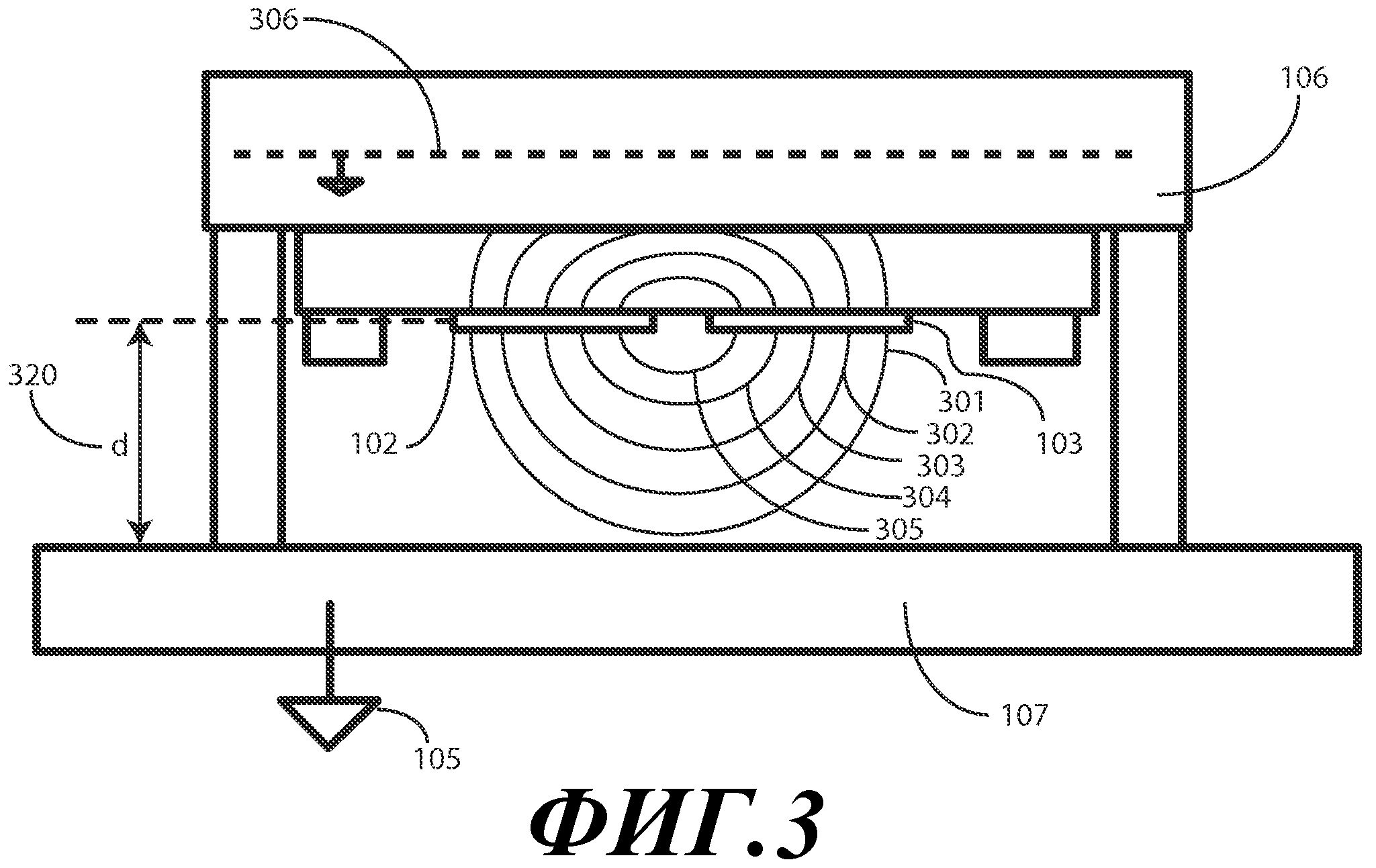
Фиг.3 и 4 - иллюстрации одного варианта осуществления емкостного датчика усилия согласно настоящему изобретению в состоянии покоя и при сжатии, соответственно, и ассоциированных с ним линий напряженности электрического поля;
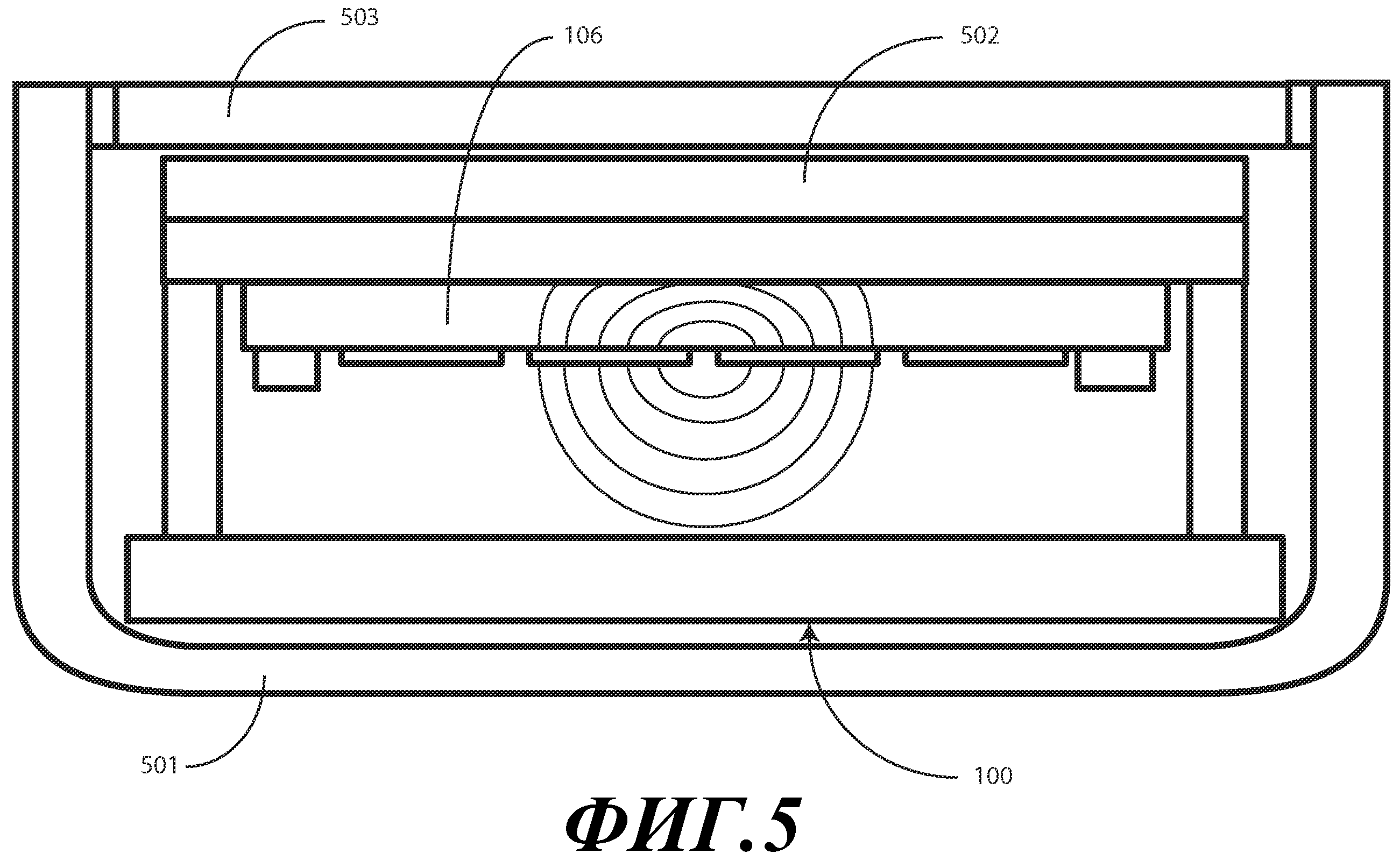
Фиг.5 - иллюстрация одного примера чувствительного к касанию пользовательского интерфейса, подходящего для использования в электронном устройстве, согласно вариантам осуществления настоящего изобретения;
Фиг.6 - иллюстрация одного электронного устройства в разобранном виде, содержащего чувствительный к касанию пользовательский интерфейс согласно вариантам осуществления настоящего изобретения;
Фиг.7 и 8 - иллюстрации одного способа использования емкостного датчика усилия для определения прилагаемого контактного усилия согласно вариантам осуществления настоящего изобретения.
Специалистам в данной области техники будет очевидно, что элементы на фигурах проиллюстрированы для простоты и ясности, и необязательно, чтобы они были вычерчены в масштабе. Например, размеры некоторых элементов на фигурах могут быть увеличены относительно других элементов, чтобы облегчить понимание вариантов осуществления настоящего изобретения.
Подробное описание изобретения
До изложения подробного описания вариантов осуществления настоящего изобретения следует отметить, что варианты осуществления представляют собой, главным образом, комбинации этапов способа и компонентов прибора, относящиеся к емкостному детектированию контактного усилия. Соответственно, компоненты прибора и этапы способа представлены, где это уместно, традиционными символами на чертежах, показывая только те конкретные детали, которые относятся к пониманию вариантов осуществления настоящего изобретения, так, чтобы не загружать раскрытие деталями, которые будут очевидны специалистам в данной области техники, для которых будет полезно приведенное в данном документе описание.
Очевидно, что описанные в данном документе варианты осуществления могут состоять из одного или более обычных процессоров и уникальных сохраненных программных команд, которые управляют одним или более процессорами, чтобы в сочетании с определенными несвязанными с процессором схемами осуществлять некоторые, большинство или все функции описанных здесь вариантов осуществления емкостного детектирования усилия. Альтернативно, некоторые или все функции могут быть реализованы посредством конечного автомата, который не содержит сохраненных программных команд, или в одной или более специализированных интегральных схемах (ASIC), в которых каждая функция или какие-либо комбинации некоторых функций реализуются как заказные логические схемы. Само собой разумеется, что может использоваться комбинация этих двух подходов. Кроме того, предполагается, что, несмотря на возможные значительные усилия и множество выборов конструкций, обусловленных, например, доступным временем, текущим уровнем технологии и экономическими соображениями, руководствуясь раскрытыми в данном документе концепциями и принципами специалисты в данной области техники с легкостью смогут генерировать такие программные команды и программы и специализированные интегральные схемы с минимальным объемом экспериментирования.
Ниже приведено подробное описание вариантов осуществления настоящего изобретения. На чертежах одинаковые номера обозначают одинаковые детали на всех фигурах. В описании и формуле изобретения следующие термины принимают значения, которые явно ассоциированы с ними, если из контекста не следует иное: значение предлога "в" включает в себя значение "в" и "на". Относительные термины, такие как первый и второй, верхний и нижний и т.п., могут использоваться исключительно для того, чтобы различать один объект или действие от другого объекта или действия, и необязательно, чтобы требовалось или подразумевалось какое-либо актуальное такое отношение или порядок между такими объектами или действиями. Кроме того, ссылочные обозначения, показанные в данном документе в скобках, указывают компоненты, которые показаны на фигуре, отличной от обсуждаемой. Например, упоминание устройства (10) в обсуждении фигуры А указывает элемент 10, показанный на фигуре, отличной от фигуры А.
Варианты осуществления настоящего изобретения предоставляют систему для емкостного детектирования контактного усилия, которое прилагается на чувствительный к касанию пользовательский интерфейс, такой как чувствительный к касанию пользовательский интерфейс для портативного электронного устройства. Один вариант осуществления системы включает в себя податливый элемент, такой как пружина или прокладка из пеноматериала, и систему для детектирования измерения емкости. Податливый элемент создает зазор между одним или более наборами электродов и опорной плоскостью заземления. Податливый элемент, сверх того, создает отношение между прилагаемым усилием и высотой зазора.
В одном варианте осуществления схема восприятия емкости включает в себя, по меньшей мере, два электрода. Для простоты описания эти электроды обозначаются в данном документе как электрод "X" и электрод "Y". В одном варианте осуществления электроды X и Y располагаются в одной плоскости. Например, они могут быть расположены на подложке. Подходящие подложки включают в себя гибкую подложку, такую как инкапсулированную в полимер медь, или жесткую подложку, такую как стекловолокно типа FR-4. Путем размещения электрода X и электрода Y на одной подложке (следует отметить, что они могут быть размещены на разных слоях подложки), электроды X и Y располагаются на одной стороне воздушного зазора, который существует между электродами и опорной плоскости заземления.
Когда схема возбуждения возбуждает один из электродов, например электрод X, между электродами X и Y устанавливается электрическое поле. Это электрическое поле задает емкость "электрода X к электроду Y", которая может быть измерена посредством воспринимающей емкость схемы. Воспринимающие емкость схемы известны в технике. Одним из примеров воспринимающей емкость схемы является воспринимающая емкость схема с переносом заряда, хотя специалистам в данной области техники, для которых полезно данное раскрытие, будет очевидно, что также могут использоваться другие эквивалентные воспринимающие емкость схемы.
В одном варианте осуществления податливый элемент создает зазор между парой электродов X-Y и опорной плоскости заземления. Опорная плоскость заземления может представлять собой просто проводящую секцию материала, которая соединена с заземлением схемы или общим узлом. Когда электрод X возбуждается, электрические поля создаются не только между электродами X и Y, но и между электродом X и опорной плоскости заземления и между электродом Y и опорной плоскости заземления. Когда податливый элемент сжимается, возможно, в результате контактного усилия, действующего на пользовательский интерфейс, зазор между электродами X и Y сокращается. В результате, соединение между электродом X и землей, а также между электродом Y и землей увеличивается, в результате чего сокращается измеряемая емкость X-Y. Таким образом, податливый элемент создает отношение между контактным усилием и смещением. Схема детектирования емкости тогда может воспринимать изменения смещения. Путем измерения изменения емкости между электродами X и Y, система может определить изменение смещения и, соответственно, определить усилие, прилагаемое на входную поверхность.
Фиг.1 представляет собой иллюстрацию одного варианта осуществления емкостного датчика 100 усилия согласно настоящему изобретению. Емкостной датчик 100 усилия включает в себя подложку 101 с, по меньшей мере, одной расположенной на ней электродной парой 102, 103. В одном варианте осуществления электродная пара 102, 103 содержит множество электродных пар. Количество и размещение электродных пар 102, 103 зависит от применения. Множество электродных пар могут быть размещены в матричной конфигурации. В добавление, множество электродных пар могут быть стратегически размещены вдоль подложки, например под иконками или целевыми областями, которые активирует пользователь.
Как упомянуто выше, подложка 101 может быть либо гибкой, либо жесткой. Например, в одном варианте осуществления подложка 101 представляет собой печатную монтажную плату, такую как схемная плата на базе материала FR4, либо гибкую подложку, инкапсулированную в полимер. В таком варианте осуществления электродная пара 102, 103 может быть либо нанесена на подложку 101, либо вытравлена обычной методикой изготовления печатной монтажной платы. Следует отметить, что электроды электродной пары 102, 103 могут быть расположены на разных слоях многослойной подложки.
В такой конфигурации электродная пара 102, 103 располагается вдоль одной стороны воздушного зазора 114 между пластиной 107 и электродной парой 102, 103. Эта "односторонняя" компоновка восприятия емкости предоставляет ряд преимуществ. Во-первых, такая структура очень выгодна, поскольку электроды на основе подложки дешевы в изготовлении. Когда вытравливаются проводящие дорожки печатной монтажной платы, требуется лишь изменить маску для добавления электродов там, где это необходимо. В этом случае не требуется выстраивать сложную электрическую структуру с большими металлическими конденсаторными пластинами, которые двигаются относительно друг друга и которые должны быть настроены в процессе изготовления. Проводящие дорожки, сверх того, используют преимущество плоскостей заземления, которые часто присутствуют в электронных сборках.
Во-вторых, когда оба электрода 102, 103 располагаются на одной стороне подложки 101, электрическое соединение с каждым электродом упрощается, поскольку дорожки от схем возбуждения могут быть изготовлены в процессе изготовления самих электродов. Следует отметить, что во многих применениях, где емкостной датчик 100 усилия используется с матрицей из электродных пар, многослойная подложка будет полезна тем, что один слой может быть использован для электродов, а другой слой может использоваться для маршрутизации электропроводящих дорожек между электродами и компонентами схемы.
В-третьих, проводящие плоскости в пакете подложки могут служить как экраны, для предотвращения помех от внешних объектов при измерении емкости.
На Фиг.2 проиллюстрирован один вариант осуществления рисунка 200 электрода, подходящего для использования в вариантах осуществления настоящего изобретения. Рисунок 200 электрода включает в себя электрод 102 X и электрод 103 Y. В иллюстративном варианте осуществления согласно Фиг.2 электрод 102 X и электрод 103 Y располагаются в одной плоскости, на одной стороне подложки, в гребенчатой чередующейся конфигурации. Следует отметить, что это лишь один рисунок 200 электрода, подходящий для использования в настоящем изобретении. Специалистам в данной области техники будут очевидны другие подходящие рисунки. Например, электрод 102 X может быть размещен на одном слое подложки, тогда как электрод 103 Y размещается на другой стороне подложки.
Ссылаясь на Фиг.1, подложка 101 соединена с первой пластиной 106. Для изготовления первой пластины 106 может использоваться множество материалов, включая стекло, пластик, металл, стекловолокно и другие материалы. Первая пластина 106 может включать в себя экран, такой как слой проводящего материала, сконфигурированный так, чтобы экранировать электродную пару 102, 103 от емкостного соединения с объектами, расположенными вблизи первой пластины 106. (Для емкостного датчика такие объекты, как палец пользователя, могут действовать как плоскость заземления. По существу, одним из подходящих местоположений для емкостного датчика 100 усилия в электронном устройстве, является место под дисплеем, таким как жидкокристаллический дисплей, где он экранируется от воздействия пальца пользователя. Хотя жидкокристаллические дисплеи представляют собой подходящий дисплей для экранирования емкостного датчика 100 усилия, специалистам в данной области техники будет очевидно, что также могут использоваться другие дисплеи, включая дисплеи на основе органических светоизлучающих диодов. В добавление к использованию дисплея для экранирования, еще одной необязательной возможностью является экранирование в первой пластине 106). Например, первая пластина 106 может включать в себя электрический экран, такой как металл. При использовании этот металл соединяется либо с заземлением 105 схемы, либо соединяется с сигнальной шиной схемы 104 возбуждения.
Следует отметить, что когда желательно наличие экранирования, подложка 101 также может быть сконфигурирована так, чтобы экранировать электродную пару 102, 103 от емкостного соединения с объектами, расположенными вблизи первой пластины 106. Например, сторона подложки 101, которая противоположна электродной паре 102, 103, может содержать электродную решетку 113, например, ряды и столбцы равностоящих окружностей или квадратов из проводящего материала, которая расположена на ней и находится прямо напротив электродной пары 102, 103. Тогда эта решетка может быть соединена с возбуждаемым электродом 102, то есть электродом X, чтобы возбуждаться посредством схемы 104 возбуждения, когда возбуждается электрод X, или с другим электродом 103. Такая конфигурация имеет эффект увеличения исходной емкостной связи между электродами X и Y, в результате чего увеличивается чувствительность датчика.
Механическое соединение между подложкой 101 и первой пластиной 106 таково, что электродная пара 102, 103 физически зафиксирована относительно первой пластины 106. Например, подложка 101 может быть механически соединена с первой пластиной 106 таким образом, чтобы расстояние между первой пластиной 106 и электродной парой 102, 103 оставалось постоянным, когда к емкостному датчику 100 усилия прилагаются усилия. Подходящее соединение между первой пластиной 106 и подложкой 101 включает в себя адгезивы и клеи.
Схема 104 возбуждения сконфигурирована так, чтобы применять к одному из электродов 102, 103 напряжение с амплитудой, измеряемой относительно заземления 105 схемы. В одном варианте осуществления схема 104 возбуждения может быть расположена вдоль подложки 101. В других вариантах осуществления схема 104 возбуждения может быть расположена в других местоположениях, и в этом случае электрические выводы, проходящие по подложке 101, соединяют электроды 102, 103 и схему 104 возбуждения. Схема 104 возбуждения может быть сконфигурирована так, например, чтобы предоставлять характеристический, основанный на частоте сигнал в электрод 102 X. Иллюстративные сигналы включают в себя волны переменного тока, квадратные волны, ступенчатые импульсы и другие подходящие сигналы, изменяющиеся во времени.
Податливый элемент, показанный на Фиг.1 как податливые элементы 108, 109, располагается между первой пластиной 106 и второй пластиной 107. В одном варианте осуществления вторая пластина 107 содержит электропроводящий материал, такой как медь или никель, который связан с заземлением 105 схемы. Это соединение заземления, как будет описано ниже, может быть использована для изменения формы линий напряженности электрического поля, ассоциированного с электродной парой 102, 103. Когда первая пластина 106 и вторая пластина 107 движутся вместе, вторая пластина 107, по существу, меняет форму линий 112 напряженности электрического поля, установленного между электродной парой 102, 103. Это измененная форма линий 112 напряженности электрического поля измеряется как изменение емкости электродной пары 102, 103.
Податливый элемент 108, 109 сконфигурирован так, чтобы механически отделять первую пластину 106 от второй пластины 107, между тем обеспечивая возможность первой пластине 106 физически перемещаться относительно второй пластины 107 под действием усилия 110 сжатия. Следует отметить, что хотя на Фиг.1 показано применение усилия 110 сжатия к первой пластине 106, емкостной датчик 100 усилия может быть инвертирован, и усилие 100 сжатия может применяться ко второй пластине 107.
В одном варианте осуществления податливый элемент 108, 109 содержит сжимающуюся прокладку, такую как прокладка из эластомера, такого как пенистая резина. Тем не менее, специалистам в данной области техники будет очевидно, что настоящее изобретение этим не ограничивается. В качестве податливого элемента 108, 109 могут использоваться другие устройства пружинного типа либо по отдельности, либо в комбинации. Сверх того, материал или устройства, используемые в качестве податливого элемента 108, 109, могут быть настроены так, чтобы улучшить движение двух пластин 106, 107 относительно друг друга. Например, сжимающаяся прокладка может быть комбинирована с пластинчатой пружиной или пружинной шайбой, чтобы обеспечить неоднородный отклик в тех случаях, когда динамическая характеристика пластин 106, 107, движущихся вместе, отличается от динамической характеристики при отдельном движении пластин 106, 107. Разработчику может потребоваться, чтобы одна была быстрее другой. Альтернативно, разработчику может потребоваться нелинейный отклик. Например, разработчику может потребоваться начальное быстрое движение пластин 106, 107 с последующим медленным движением. Для обеспечения такого отклика могут использоваться различные комбинации материалов, например пена, металл, резина и т.п.
Схема 111 детектирования емкости соединена с электродной парой. Схема 111 детектирования емкости сконфигурирована так, чтобы детектировать измерение или указание емкости электродной пары 102, 103 в ответ на применение сигнала схемой 104 возбуждения. По существу, схема 111 детектирования емкости может детектировать изменение емкости, когда податливый элемент 108, 109 сжимается. Емкость меняется, поскольку сила связи между каждым электродом электродной пары 102, 103 и землей изменяется вместе с расстоянием между электродной парой 102, 103 и заземленной второй пластиной 107. По существу, между емкостью и смещением первой пластины 106 существует отношение. Схема 111 детектирования емкости может определить изменение емкости путем определения изменения емкости между состоянием покоя пластин 106, 107 и сжатым состоянием пластин 106, 107. Когда известна постоянная пружины податливого элемента 108, 109, это изменение емкости может быть преобразовано в значение смещения.
На Фиг.3 и 4 можно с легкостью увидеть определение смещения. Фиг.3 представляет собой один вариант осуществления емкостного датчика 100 усилия согласно одному варианту осуществления настоящего изобретения в состоянии покоя, тогда как Фиг.4 иллюстрирует этот емкостной датчик 100 усилия в сжатом состоянии, обусловленном усилием 110 сжатия, прилагаемым к первой пластине 106. В вариантах осуществления показанных на Фиг.3 и 4, первая пластина 106 содержит слой 306 электропроводящего материала, который соединен с заземлением схемы. (Следует отметить, что первая пластина 106 в равной степени может быть соединена с сигнальной линией, например с электродом X). Вторая пластина 107 содержит металлическую пластину, такую как стальная пластина, например, которая соединена с заземлением 105 схемы.
На Фиг.3 и 4 электрическое поле, созданное, когда схема (104) возбуждения прилагает сигнал к одному из электродов 102, 103, проиллюстрировано посредством линий напряженности поля. На Фиг.3 линии 301, 302, 303, 304, 305 напряженности поля представляют поле в состоянии покоя. Эти линии 301, 302, 303, 304, 305 соединяют между собой электроды 102, 103, когда пластины 106, 107 удалены друг от друга на расстояние 320 покоя.
Ссылаясь на Фиг.4, когда пластины 106, 107 сжимаются, расстояние 420 между электродами 102, 103 и второй пластиной 107 сокращается. Поскольку вторая пластина 107 соединена с заземлением 105 схемы, эта пластина 107 сокращает некоторые из этих линий. В результате форма электрического поля меняется - это заметно из меньшего количества линий напряженности электрического поля, соединяющих электроды 102, 103. На Фиг.4 линии 401, 402 напряженности поля представляют это поле. Применение усилия 110 сжатия вызывает деформацию податливого элемента 108, 109, результатом которой является смещение (проиллюстрированное посредством разности между расстоянием 320 и расстоянием 420) электродов 102, 103 относительно стальной пластины 107. Это смещение воспринимается схемой (111) детектирования емкости как уменьшение емкости между электродной парой 102, 103. Схема обработки способна выполнять простое вычисление смещения из емкости, используя постоянную пружины податливого элемента 108, 109.
Когда требуется измерить как контактное усилие, так и позицию контакта, емкостной датчик касания может быть интегрирован с емкостным датчиком касания. На Фиг.5 проиллюстрирован один такой вариант осуществления. Хотя в настоящем документе в качестве подходящего устройства определения "позиции касания" используется емкостной датчик касания, специалистам в данной области техники будет очевидно, что настоящее изобретение этим не ограничивается. Также могут использоваться другие датчики касания, включая, но не ограничиваясь перечисленным, оптический датчик, датчик акустических волн поверхности или резистивный сенсорный экран.
На Фиг.5 показан емкостной датчик 100 усилия согласно Фиг.1. Емкостной датчик 100 усилия расположен в корпусе 501 портативного электронного устройства, такого как мобильный телефон или PDA. Емкостной датчик касания 502 расположен над первой пластиной 106, под лицевым элементом 503, который служит как главная лицевая сторона электронного устройства. В одном варианте осуществления, лицевой элемент 503 может быть сконфигурирован так, чтобы немного перемещаться относительно корпуса 501 для согласования функционирования емкостного датчика 100 силы. В таком варианте осуществления для уплотнения лицевого элемента 503 в корпусе 501 может использоваться уплотнение, соединение или прокладка. Датчик 502 касания, который может представлять собой емкостной датчик касания, сконфигурирован так, чтобы детектировать позицию объекта относительно устройства.
Лицевой элемент 503 представляет собой крышку корпуса, которая может быть съемной или несъемной, для электронного устройства. Когда электронное устройство включает в себя чувствительное к касанию средство ввода, лицевой элемент 503 сконфигурирован так, чтобы принимать "касание" пальца или стилуса пользователя. В одном иллюстративном варианте осуществления лицевой элемент 503 представляет собой тонкий жесткий материал, такой как армированное стекло или пластик. В других вариантах осуществления может использоваться тонкий гибкий материал, такой как прозрачная или полупрозрачная пленка из пластика. Для предоставления орнаментации, текста, графики и других визуальных индикаторов, на задней поверхности лицевого элемента 503 может быть нанесена выборочная печать. Печать также может потребоваться на передней поверхности для различных причин. Например, может потребоваться тонкая текстурная печать или печать верхнего слоя, чтобы предоставить полупрозрачный матовый слой поверх электронного устройства. Подобная окончательная обработка полезна для предотвращения возникновения косметических дефектов от острых объектов или отпечатков пальцев. Лицевой элемент 503 также может включать в себя барьер ультрафиолетового света или иной фильтр.
Когда емкостной датчик касания используется как датчик 502 касания, в одном варианте осуществления емкостной датчик касания формируется путем нанесения небольших емкостных плоских электродов на подложку, и сконфигурирован так, чтобы детектировать приблизительную позицию объекта вдоль первой пластины 106 (или второй пластины 107, если емкостной датчик 100 усилия инвертирован). Например, на подложке могут быть отпечатаны электроды из оксида индия и олова. Схема управления в устройстве детектирует изменение емкости конкретной комбинации пластин на датчике 502 касания, когда палец пользователя или стилус располагается вблизи лицевого элемента 503. Датчик 502 касания может использоваться в обычном режиме, например, чтобы детектировать общую приблизительную позицию объекта относительно лицевого элемента 503, хотя эту функциональность также может предоставлять емкостной датчик 100 усилия. Чаще датчик 502 касания будет использоваться в особом режиме, где может быть детектирована конкретная пара конденсаторных пластин, чтобы детектировать местоположение объекта вдоль длины и ширины лицевого элемента 503.
Следует отметить, что датчик 502 касания и емкостной датчик 100 усилия могут быть интегрированы в один компонент. Путем использования многослойной подложки, такой как многослойная печатная монтажная плата, различные емкостные датчики и экраны могут быть интегрированы в одну подложку. Например, по меньшей мере, одна электродная пара (102, 103) емкостного датчика 100 усилия, используемого для измерения усилия, может быть расположена вдоль нижней стороны такой печатной монтажной платы. Экран, где это необходимо, может быть интегрирован как внутренний слой печатной монтажной платы. Тогда, емкостные датчики для датчика 502 касания могут быть размещены поверх печатной монтажной платы.
На Фиг.6 показано электронное устройство 600 в разобранном виде, такое как мобильный телефон, персональный цифровой секретарь или портативный компьютер, которое содержит, по меньшей мере, один емкостной датчик 100 усилия для определения контактного усилия согласно вариантам осуществления настоящего изобретения. Для целей описания электронное устройство 600 согласно Фиг.6 описано как устройство с чувствительным к касанию интерфейсом. Такие устройства являются подходящими для применения емкостных датчиков касания, описанных в настоящем документе. Специалистам в данной области техники будет очевидно, что это не единственное применение, с которым может быть использован емкостной датчик 100 усилия. Варианты настоящего изобретения также могут использоваться с другими пользовательскими интерфейсами, включая интерфейсы с клавиатурой или другими элементами управления.
Начиная с верхней стороны электронного устройства 600, лицевой элемент 601 сконфигурирован так, чтобы принимать входной тактильный сигнал от пользователя. Лицевой элемент 601 охватывает, по меньшей мере, часть электронного устройства. В одном варианте осуществления лицевой элемент охватывает основную лицевую поверхность (или ее часть) электронного устройства 600. Лицевой элемент 601 может быть изготовлен из армированного стекла, пластика или других подходящих материалов. В одном варианте осуществления лицевой элемент 601 представляет собой жесткий лицевой элемент, и он включает в себя электропроводящий материал, такой как оксид индия и олова, который соединен с узлом земли в электронном устройстве 600 для экранирования.
Далее, электронное устройство 600 включает в себя необязательный слой 602 емкостного датчика касания. Слой 602 емкостного датчика касания может быть включен в состав устройства тогда, когда требуется определить не только контактное усилие, принимаемое от пользователя, но так же и позицию контакта. Слой 602 емкостного датчика касания расположен под, по меньшей мере, частью лицевого элемента 601, например в области пользовательского интерфейса. Слой 602 емкостного датчика касания сконфигурирован так, чтобы детектировать позицию вдоль электрического устройства 600, которая соответствует пальцу пользователя или стилусу.
Во многих вариантах осуществления, электронное устройство 600 будет включать в себя дисплей 606 высокого разрешения для представления информации пользователю. Кроме того, для представления виртуальных клавиш и другой информации пользовательского интерфейса, опционально может использоваться дисплей 607 низкого разрешения, описанный в находящейся на одновременном рассмотрении заявке '228, указанной выше. В одном варианте осуществления, по меньшей мере, часть подложки 101 может быть размещена под дисплеем (либо дисплеем 606, либо дисплеем 607, или под обоими этими дисплеями), и дисплей может быть использован для целей экранирования, как описано выше.
Далее располагается емкостной датчик 100 усилия. В одном варианте осуществления емкостной датчик усилия включает в себя подложку 101, которая расположена под лицевым элементом 601. Подложка 101 может быть соединена с первой пластиной 106. Альтернативно, расположенные выше компоненты могут служить как первая пластина 106, в результате чего устраняется необходимость в дополнительном компоненте.
Иллюстративная подложка 101 согласно Фиг.6 зафиксирована относительно лицевого элемента 601, так что промежуток между лицевым элементом 601 и подложкой 101 остается постоянным, когда пользователь активирует пользовательский интерфейс. Подложка 101 включает в себя, по меньшей мере, одну электродную пару, расположенную на ней. В иллюстративном варианте осуществления согласно Фиг.6, по меньшей мере, одна электродная пара включает в себя множество электродных пар, расположенных в матричной конфигурации на нижней части подложки 101. В одном варианте осуществления матрица содержит множество датчиков электродных пар. Это множество датчиков может быть скомпоновано различными методами, включая расположение по столбцам и рядам, расположение в произвольном порядке или расположение согласно частям пользовательского интерфейса, которые, вероятно, будут приводиться в действие пользователем.
В одном варианте осуществления подложка 101 представляет собой гибкую подложку. В одном варианте осуществления электродная пара расположена вдоль гибкой подложки в чередующемся рисунке, где один электрод чередуется с другим, как показано на Фиг.2.
Электропроводящая пластина 107, которая соединена с узлом земли электронного устройства 600, располагается под подложкой 101. Податливый элемент 108, 109 отделяет подложку 101 от электропроводящей пластины 107 и обеспечивает между ними воздушный зазор. В одном варианте осуществления податливый элемент 108, 109 содержит комбинацию сжимаемого материала и металлических пружин. Например, для податливого элемента 108, 109 подходит сочетание сжимаемой пены и пластинчатой пружины. Очевидно, что вместо комбинации податливых элементов может использоваться один податливый элемент.
Также показана электронная схема 603. Электронная схема 603 включает в себя воспринимающую емкость схему 604. Воспринимающая емкость схема 604, которая может быть реализована посредством микропроцессора, программируемой логики или другой управляющей схемы, электрически соединена с электродной парой и принимает от нее входной сигнал. Воспринимающая емкость схема 604, которая может выполнять внедренное внутреннее программное обеспечение, хранимое в ассоциированной памяти, сконфигурирована так, чтобы определять емкостную связь электродной пары, когда податливый элемент 107 сжимается. Далее, эта "сжатая" емкость может быть сравнена с емкостью "состояния покоя", чтобы определить степень усилия, прилагаемого на лицевой элемент 601, как описано выше.
В одном варианте осуществления схема 605 обработки, которая также может представлять собой микропроцессор, программируемую логику или иной контроллер, включена в состав и работает с воспринимающей емкость схемой 604. Схема 605 обработки сконфигурирована посредством исполняемого кода, чтобы определять контактное усилие, которое зависит от степени сжатия податливого элемента 108, 109. Исполняемое внутреннее программное обеспечение, хранимое в ассоциированной памяти (не показана), может использоваться для программирования схемы 605 обработки, чтобы выполнять определение усилия. Например, в памяти может храниться опорная емкость, которая представляет собой меру емкости, когда емкостной датчик 100 усилия находится в состоянии покоя. Когда податливый элемент 108, 109 сжимается, воспринимающая емкость схема 604 определяет емкость сжатия, используя методики восприятия переноса заряда или иное подходящее средство восприятия емкости. Емкость сжатия, далее, передается в схему 605 обработки.
Схема 605 обработки определяет величину контактного усилия на основании изменения между емкостью сжатия и опорной емкостью. Это может быть выполнено путем извлечения из памяти коэффициента упругости пружины (например, постоянной пружины), ассоциированного с податливым элементом 108, 109, и определения степени сжатия податливого элемента 108, 109 путем использования степени сжатия и коэффициента упругости пружины, чтобы определить величину контактного усилия. Также могут быть выполнены иные вычисления. Например, к коэффициенту упругости пружины может быть применен коэффициент компенсации старения, чтобы компенсировать потерю упругости с течением времени.
Схема 605 обработки или воспринимающая емкость схема 604 для этого может быть сконфигурирована так, чтобы предоставлять сигнал приведения в действие устройства, когда контактное усилие превышает предопределенное пороговое значение. Например, чтобы исключать неумышленную операцию касания, схема 605 обработки может быть сконфигурирована так, чтобы определять, превышает ли контактное усилие предопределенное пороговое значение, такое как 0,10 фунтов. При такой конфигурации схема 605 обработки не будет предоставлять сигнал приведения в действие в центральный контроллер или процессор электронного устройства 600, если контакт не превышает этого усилия.
Фиг.7 представляет собой иллюстрацию способа 700 определения контактного усилия, прилагаемого к поверхности, такой как поверхность электронного устройства, согласно вариантам осуществления настоящего изобретения. Этот способ подходит для кодирования встроенного программного обеспечения или программного обеспечения, которое выполняется на процессоре в электронном устройстве. Многие их этапов этого способа были описаны выше, так что ниже приведено их краткое изложение.
На этапе 701 предоставляется чувствительное к касанию устройство, содержащее жесткую поверхность и электропроводящую, заземленную пластину, которые отделены друг от друга податливым элементом. Также предоставляется подложка. Подложка, которая остается в фиксированном положении относительно поверхности, включает в себя, по меньшей мере, одну электродную пару. В одном варианте осуществления упомянутая, по меньшей мере, одна электродная пара, которая может быть сконфигурирована в чередующейся геометрической расстановке, располагается на одной подложке на одной стороне воздушного зазора, заданном подложкой и электропроводящей, заземленной пластиной. Следует отметить, что, по меньшей мере, одна электродная пара может включать в себя множество электродных пар, которые могут быть расположены в конфигурации матрицы строк и столбцов.
На этапе 702 предоставляется воспринимающая емкость схема, работающая посредством упомянутой, по меньшей мере, одной электродной пары. Как описано выше, воспринимающая емкость схема сконфигурирована так, чтобы детектировать значение емкости, ассоциированной с этой электродной парой.
На этапе 704 воспринимающая емкость схема получает опорную емкость, ассоциированную с упомянутой, по меньшей мере, одной электродной парой, когда податливый элемент находится в состоянии покоя. Эта опорная емкость может быть определена в реальном времени путем измерения, когда податливый элемент находится в состоянии покоя. Альтернативно, опорная емкость может быть сохранена в памяти при изготовлении или процесса калибровки.
На этапе 704 воспринимающая емкость схема определяет емкость сжатия, когда к поверхности прилагается контактное усилие, сжимающее податливый элемент. На этапе 705 воспринимающая емкость схема определяет величину контактного усилия на основании изменения между емкостью сжатия и опорной емкостью.
Ссылаясь на Фиг.8, один иллюстративный вариант осуществления определения контактного усилия проанализирован более детально. На этапе 801 воспринимающая емкость схема получает коэффициент упругости пружины, ассоциированный с податливым элементом. Часто этот коэффициент упругости пружины сохраняется в памяти в процессе изготовления емкостного датчика усилия. На этапе 802 воспринимающая емкость схема определяет степень сжатия податливого элемента на основании изменения между емкостью сжатия и опорной емкостью, как описано выше, путем использования степени сжатия и коэффициента упругости пружины, чтобы определить величину контактного усилия. Как описано выше, при определении контактного усилия воспринимающая емкость схема может применять к коэффициенту упругости пружины коэффициент компенсации старения.
В емкостных датчиках силы по предшествующему уровню техники используются обычные конденсаторы на параллельных пластинах, в которых два электрода, формирующие емкость, расположены на противоположных сторонах диэлектрического материала (воздушного зазора). Варианты осуществления настоящего изобретения обеспечивают ряд преимуществ относительно датчиков по предшествующему уровню техники. Как описано выше, конденсаторные пары согласно вариантам осуществления настоящего изобретения могут быть управляемым и экономически эффективным образом размещены на одной подложке - либо на одном слое одной подложки, либо на множестве слоев. Таким образом, конденсаторные пары располагаются на одной стороне воздушного зазора между плоскостью заземления и подложкой. Такая конфигурация механически более проста и более надежна, чем при расположении конденсаторных пластин на обеих сторонах воздушного зазора. Далее, электродные пары согласно вариантам осуществления настоящего изобретения могут быть сконфигурированы в матричной ориентации, и они могут быть легко и дешево экранированы от таких объектов, как палец пользователя.
Также есть другие преимущества. Во-первых, варианты настоящего изобретения могут быть оптимизированы для восприятия движения в плоскости тактильной поверхности, такой как армированное стекло, путем использования комбинации пружин и электродов, сконфигурированных в множестве матриц. Кроме того, пружинящее действие податливого элемента может быть сконфигурировано так, чтобы обеспечивать разные характеристики при сжатии и при расслаблении. Чередующиеся конфигурации электродов обеспечивают возможность точной, простой и выборочной электронной калибровки, чтобы обеспечить более равномерное вычисление усилия касания.
Сверх того, как упомянуто выше, емкостные датчики для определения приблизительной позиции объекта могут быть комбинированы с емкостным датчиком усилия. При этом чувствительные к касанию пользовательские интерфейсы могут иметь как способность определения местоположения, так и способность восприятия усилия. Для простых приложений чувствительной к касанию клавиатуры, комбинация слоя емкостного датчика касания и емкостного датчика усилия может функционировать вместе индивидуальным образом. Когда вывод емкостного датчика касания и емкостного датчика усилия комбинируются по логике "И", может быть сокращена вероятность ложной, непреднамеренной операции из-за случайного касания к пользовательскому интерфейсу.
Когда электронное устройство включает в себя чувствительный к касанию пользовательский интерфейс, такой как сенсорный экран, варианты осуществления настоящего изобретения устраняют необходимость в неестественных "жестах постукивания" при выборе различных функций устройства. Например, это может быть реализовано следующим образом: сначала определяется приблизительное местоположение пальца пользователя или стилуса. Затем схема обработки определяет, находится ли контакт в допустимой области, или соответствует ли он конкретной цели или иконке, приводимой в действие пользователем. При положительном результате емкостная схема восприятия усилия может быть сконфигурирована так, чтобы привести в действие эту иконку только тогда, когда превышается предварительно определенное пороговое значение усилия.
В вышеизложенной спецификации были раскрыты конкретные варианты осуществления настоящего изобретения. Однако специалистам в данной области техники будет очевидно, что могут быть выполнены различные модификации и изменения в рамках объема настоящего изобретения, определенного нижеприведенной формулой изобретения. Таким образом, хотя выше были проиллюстрированы и описаны предпочтительные варианты осуществления настоящего изобретения, очевидно, что настоящее изобретение этим не ограничивается. Специалистам в данной области техники будут очевидны многочисленные модификации, изменения, вариации, замены и эквиваленты в рамках сущности и объема настоящего изобретения, которые определяются следующей формулой изобретения. Соответственно, спецификацию и фигуры следует рассматривать в иллюстративном смысле, а не ограничительном, и все подобные модификации должны входить в объем настоящего изобретения. Эффект, преимущества, решения проблем, а также какие-либо элементы, которые могут привести к возникновению или более точному изложению каких-либо эффектов, преимуществ или решений, не должны быть истолкованы как критические, необходимые или существенные функции или элементы какого-либо или всех пунктов формулы изобретения.
Реферат
Изобретение относится к емкостным датчикам, в которых применяется установленная на подложке электродная пара, чтобы по изменению емкости определить степень контактного усилия. Технический результат - упрощение и повышение надежности. Емкостной датчик (100) усилия включает в себя подложку (101) с, по меньшей мере, одной расположенной на ней электродной парой (102, 103), которая задает емкость. Подложка (101) зафиксирована относительно первой пластины (106). Схема (104) возбуждения сконфигурирована так, чтобы применять напряжение относительно заземления 105 схемы к электродной паре (102, 103). Первая пластина (106) разделяется от второй пластины (107), которая соединена с заземлением 105 схемы, податливым элементом (108, 109). Податливый элемент (108, 109) сконфигурирован так, чтобы противодействовать усилию (110) сжатия, между тем обеспечивая возможность перемещения первой пластины (106) относительно второй пластины (107). Схема (111) детектирования емкости сконфигурирована так, чтобы детектировать изменение емкости, когда податливый элемент (108, 109) сжимается. Далее, из изменения емкости и постоянной пружины упомянутого податливого элемента (108, 109) определяется усилие (110) сжатия. 3 н. и 17 з.п. ф-лы, 8 ил.
Формула
подложку с расположенной на ней, по меньшей мере, одной электродной парой, определяющей емкость;
схему возбуждения, сконфигурированную так, чтобы прилагать напряжение относительно заземления схемы к упомянутой, по меньшей мере, одной электродной паре;
первую пластину, зафиксированную относительно подложки;
вторую пластину, электрически соединенную с заземлением схемы;
податливый элемент, расположенный между первой пластиной и второй пластиной и сконфигурированный так, чтобы механически отделять друг от друга первую пластину и вторую пластину и противодействовать усилию сжатия, между тем обеспечивая возможность физического перемещения первой пластины относительно второй пластины под действием усилия сжатия; и
схему детектирования емкости, сконфигурированную так, чтобы детектировать изменение емкости, когда податливый элемент сжимается, причем емкость зависит от расстояния между первой пластиной и второй пластиной.
лицевой элемент, сконфигурированный так, чтобы принимать тактильный ввод, причем этот лицевой элемент охватывает, по меньшей мере, часть лицевой поверхности электронного устройства; и
подложку, размещенную под лицевым элементом и зафиксированную относительно лицевого элемента, с размещенной на ней, по меньшей мере, одной электродной парой;
электропроводящую пластину, которая соединена с узлом земли и которая размещена внутри электронного устройства и физически отделена от подложки воздушным зазором;
податливый элемент, размещенный между лицевым элементом и электропроводящей пластиной; и
воспринимающую емкость схему, которая действует посредством, по меньшей мере, одной электродной пары и которая сконфигурирована так, чтобы определять емкостную связь упомянутой, по меньшей мере, одной электродной пары, когда упомянутый податливый элемент сжимается.
предоставляют чувствительный к касанию прибор, содержащий поверхность и электропроводящую, заземленную пластину, которые отделены посредством податливого элемента, дополнительно содержащий, по меньшей мере, одну электродную пару, размещенную на подложке, которая удерживается в фиксированном положении относительно упомянутой поверхности;
предоставляют воспринимающую емкость схему, соединенную с, по меньшей мере, одной электродной парой;
получают опорную емкость, ассоциированную с, по меньшей мере, одной электродной парой, когда упомянутый податливый элемент находится в состоянии покоя;
из воспринимающей емкость схемы определяют емкость сжатия, когда к поверхности прилагается контактное усилие, сжимающее податливый элемент; и
определяют величину контактного усилия на основании изменения между емкостью сжатия и опорной емкостью.
получают коэффициент упругости пружины, ассоциированный с упомянутым податливым элементом;
определяют степень сжатия податливого элемента на основании изменения между емкостью сжатия и опорной емкостью; и
используют степень сжатия и коэффициент упругости пружины, чтобы определить величину контактного усилия.
Документы, цитированные в отчёте о поиске
Емкостной датчик давления, устанавливаемый на подставке (варианты), снижающая давление подставка и способ анодного соединения двух пластин
Комментарии