Способ демодулирования сигналов данных, модулированных цифровым способом - RU2144739C1
Код документа: RU2144739C1
Чертежи



Описание
Изобретение относится к радиоприемникам, предназначенным для приема модулированных цифровым методом сигналов, и более конкретно - к способу демодулирования или декодирования сигнала данных, модулированного цифровым методом.
Способы цифровой модуляции включают в себя способы чисто фазовой модуляции, в которых фаза сигнала несет цифровую информацию, а амплитуда сигнала не имеет значения; способы амплитудной модуляции, в которых информация содержится в переменных уровнях амплитуды; и комбинированные способы. Даже при использовании чисто фазовой модуляции, когда сигнал проходит по каналу, подвергаясь искажениям, обусловленным отражениями или временной дисперсией, принимаемый сигнал будет иметь изменения амплитуды, которые зависят от информационных битов, образующих сигналы. Специальные методы детектирования, имеющие хорошие рабочие характеристики, используют в этих условиях информацию, содержащуюся в амплитудных изменениях. Если информация содержится в изменениях амплитуды, в приемнике необходимо некоторое масштабирование для устранения произвольного изменения амплитуды в канале распространения между передатчиком и приемником. Такое масштабирование производят в приемнике с помощью автоматической регулировки усиления (АРУ). При этом возникает дилемма: нужно решать, как системе АРУ следует адаптироваться к детектируемым изменениям в принимаемых сигналах - быстро или медленно; если слишком быстро, то несущие информацию изменения амплитуды могут быть частично устранены, если слишком медленно, то приемнику не удастся адаптироваться к изменяющимся колебаниям траектории распространения сигнала, например из-за меняющегося положения мобильного приемника.
Типовая система АРУ, используемая на протяжении примерно 60 лет в аналоговых приемниках с амплитудной модуляцией, основывается на модуляции информации обычно путем качания амплитуды передаваемого сигнала в одинаковой степени вверх и вниз относительно среднего значения. Путем определения среднего значения принимаемого сигнала путем вычисления текущего среднего, т. е. с использованием фильтра нижних частот можно решать, находится ли среднее значение уровня принятого сигнала в детекторе в нужных пределах, и если нет, то коэффициент усиления одного или нескольких усилительных каскадов в приемнике повышают или понижают, чтобы ввести продетектированное среднее значение в нужные пределы.
Кроме того, известны системы для выбора оптимальных постоянных времени, порогов, мертвых зон или распределения регулировки усиления между разными усилительными каскадами. В последнее время появление устройства для цифровой обработки сигналов обеспечило конструкторам большие возможности в осуществлении оптимальных стратегий АРУ в рамках выполняемой микропроцессором программы.
С развитием радиолокации стало очевидным, что известные способы АРУ неэффективны, поскольку невозможно заранее спрогнозировать уровень отраженного от цели сигнала, чтобы определить необходимый коэффициент усиления приемника. Был разработан приемник с детектором, названный логарифмическим усилителем. Этот тип приемника состоит из цепочки постепенно насыщающих (ограничивающих) усилительных и детекторных каскадов, при этом выходные сигналы детектора суммируются. Слабые сигналы могут приводить в действие только детектор в конце усилительной цепочки. С повышением уровня сигнала этот последний усилитель и детектор насыщаются, в то время как предыдущий каскад начинает вносить свой вклад в выходной сигнал, и т.д. Таким образом, это устройство дает единичное приращение в суммарном выходном сигнале детектора всякий раз, когда выходной сигнал увеличивается на коэффициент, равный усилению на каскад, т.е. реализуется логарифмическая характеристика. Такой приемник устраняет необходимость использования АРУ для обеспечения функционирования в широком динамическом диапазоне входных сигналов.
Еще один характерный принцип АРУ, используемый в приемниках со скачкообразной перестройкой частоты, известен как АРУ с памятью. Когда приемник систематически или псевдослучайным образом перестраивается между некоторым числом частотных каналов при управлении процессора скачкообразной перестройки частоты, то разные потери при распространении на разных частотах могут потребовать, чтобы усиление регулировалось в соответствии с выбранной частотой. Это может быть реализовано с помощью усилительных каскадов с цифровым программированием коэффициента усиления, при этом установка коэффициента усиления для каждой выбранной частоты осуществляется вызовом соответствующего значения из памяти. При приеме "скачка" или пачки сигнала на выбранной частоте значение коэффициента усиления обновляют и снова записывают в память для этой частоты, чтобы использовать это обновленное значение в следующий раз. Иногда, чтобы обеспечить достаточно быструю адаптацию усиления, даже когда каждый канал из большого числа каналов выбирают нечасто, можно разработать методы частичного обновления коэффициентов усиления, при которых будут использоваться значения коэффициентов усиления для определенных частот исходя из наблюдений, сделанных на другой частоте.
Еще один характерный принцип АРУ, имеющий отношение к способу, реализованному в логарифмическом усилителе, описан в патенте США N 5048059 на "Логарифмически полярную обработку сигнала". Для радиосигнала, характеризуемого фазой и амплитудой, требуется пара числовых последовательностей для полного его описания. Обычно используют векторное представление в декартовой системе координат, причем радиосигнал описывают с помощью косинусоидальной или синфазной составляющей X и синусоидальной или квадратурной составляющей Y. Радиосигнал разлагают на его составляющие I и Q путем его умножения на косинусоидальный опорный сигнал или синусоидальный опорный сигнал, сглаживая полученный результат и затем преобразуя их в цифровую форму для последующей цифровой обработки. При обычном подходе АРУ требуется для удержания уровня сигнала в точке преобразования в цифровую форму в оптимальной части динамического диапазона аналого-цифрового преобразователя.
В способе, раскрытом в указанном патенте, декартово представление не используют, а используют полярное представление, в котором логарифм амплитуды сигнала определяется цифровым преобразованием выходного сигнала детектора логарифмического приемника радиолокационного типа, одновременно с цифровым преобразованием насыщенного выходного сигнала последнего усилительного каскада для получения значения, связанного с фазой. Тем самым создается возможность цифрового преобразования радиосигнала с сохранением его полного векторного характера до определения масштабирования АРУ. Затем можно последующей обработкой в цифровом процессоре сигнала определить оптимальное масштабирование для демодуляции сигнала, содержащего информацию в его амплитудных изменениях.
С использованием АРУ в приемниках тесно связана автоматическая подстройка частоты (АПЧ). Цель АПЧ заключается в устранении ошибок по частоте, связанных неточностями по частоте приемника или передатчика или с доплеровским сдвигом из-за относительного перемещения, что в противном случае будет препятствовать извлечению информации, содержащейся в частотной или фазовой модуляции. Как и в случае систем АРУ, аналогичная дилемма существует и для систем АПЧ, а именно: как отделить изменения, обусловленные неизвестной передаваемой информацией, от других источников изменений сигнала. Патент США N 5136616 описывает способ, которым некоторые требования к параметрам системы АПЧ взаимосвязывают с соответствующими постулатами последовательности модуляции данных, лежащей в основе принятого сигнала, причем параметры АПЧ сохраняют и обновляют или сбрасывают при принятии решения о том, какие из соответствующих последовательностей данных с наибольшей вероятностью правильные.
Задачей изобретения является решение вышеуказанных проблем, характерных для известного уровня техники, путем хранения многочисленных значений параметра АРУ соответственно разным определенным комбинациям передаваемых данных и принятия решений о том, какие параметры АРУ нужно сохранить и обновить или отбросить параллельно с определением тех комбинаций данных, которые с наибольшей вероятностью были переданы.
В соответствии с одним из вариантов осуществления данного изобретения заявлен способ для декодирования или демодулирования принимаемых модулированных сигналов цифровых данных. Сначала принятые сигналы преобразуют из аналоговых в цифровые для получения выборок цифровых сигналов. Выборки цифровых сигналов затем сравнивают со значениями выборок, ожидаемыми для каждого числа возможных последовательностей символов с использованием коэффициента масштабирования, связанного с каждой из последовательностей символов для определения значения рассогласования для каждой последовательности. Значения рассогласования являются поэтому логически самосогласованными. Затем наименьшее суммарное значение рассогласования выбирают из всех предыдущих последовательностей, которые могут логически предшествовать новой последовательности, которая должна быть накоплена при значении рассогласования для этой новой последовательности, при этом выбранное рассогласование идентифицирует наиболее оптимальную предшествующую последовательность. Затем выбирают коэффициент масштабирования, связанный с оптимальной предшествующей последовательностью; коэффициент масштабирования обновляют для получения коэффициента масштабирования, связанного с данной новой последовательностью.
Признаки и преимущества изобретения будут понятны специалисту в данной области техники из изложенного ниже описания, иллюстрируемого чертежами, на которых
представлено следующее:
фиг. 1 - демодулятор оценки последовательности максимального правдоподобия (ОПМП) 16 состояний для двоичных символов в соответствии с изобретением;
фиг. 2
- демодулятор ОПМП, который использует логарифмически полярную арифметику согласно одному из вариантов осуществления изобретения;
фиг. 3 - вычислитель логарифмически полярной метрики согласно
одному из вариантов осуществления изобретения;
фиг. 4 - вычислитель логарифмически полярной метрики в соответствии с другим вариантом осуществления изобретения;
фиг. 5 - декодер ОПМП,
имеющий АПЧ и АРУ предсостояния в соответствии с одним из вариантов осуществления изобретения;
фиг. 6 - вычислитель логарифмически полярной метрики для комбинированных АПЧ и АРУ в
соответствии с одним из вариантов осуществления изобретения.
Описание вариантов осуществления изобретения.
Настоящее изобретение в первую очередь предназначено для использования в сотовых системах связи, но специалистам в данной области будет понятно, что данное изобретение может иметь различные другие применения для техники связи.
Данное изобретение относится к приемникам для приема модулированных цифровым методом сигналов, в которых соответствующие формы передаваемых сигналов содержат символы данных и в которых вследствие фильтрации в передатчике для ограничения передаваемого спектра, фильтрации в приемнике для устранения помеховых сигналов либо случайных искажений на траектории распространения, обусловленных отраженными сигналами от отражающих объектов, принятая форма сигнала может подвергаться влиянию межсимвольной интерференции (МСИ), в связи с чем выборки принятого сигнала зависят не только от одного символа переданных данных, а от нескольких соседних символов. Другими словами, влияние канала передачи приводит к тому, что символы "смазываются" друг с другом. Из-за этого чисто фазомодулированные сигналы могут приниматься с зависящей от передаваемых данных амплитудной модуляцией и также с фазовой модуляцией, и аналогично чисто амплитудно-модулированные сигналы могут приниматься с дополнительной фазовой модуляцией. Модуляцию данных можно выполнять с помощью разных способов, таких как фазовая манипуляция, квадратурная фазовая манипуляция, минимальная частотная манипуляция, минимальная частотная манипуляция с гауссовой фильтрацией, многоуровневая амплитудная, фазовая или частотная модуляция, многоуровневая квадратурная амплитудная модуляция, импульсная квадратурная амплитудная модуляция и квадратурная фазовая манипуляция с поворотом на π/4. Известный способ демодулирования сигналов, испытывающих влияние указанных воздействий, использует модель общей траектории передачи между модулирующим источником данных и демодулятором. Эту модель используют для прогнозирования и фазы, и амплитуды, т.е. комплексной векторной величины принимаемого сигнала для всех возможных последовательностей символов данных. Прогнозированные значения затем сравнивают с фактическими принятыми выборками сигналов и принимают решения о том, какая из определенных последовательностей символов данных дает наилучшее совпадение.
Число возможных последовательностей данных, которые подлежат рассмотрению, является конечным. Если данный символ испытывает влияние МСИ только от непосредственно окружающих символов, тогда достаточно будет рассмотреть только все возможные тройки символов при прогнозировании выборок принимаемого сигнала. При использовании двоичных символов необходимо будет рассмотреть только 8 возможных комбинаций. При четвертичной модуляции необходимо будет рассмотреть 64 возможных комбинации.
Решение для троек символов должно быть согласованным с накладываемыми тройками символов. Например, можно логически решить, что двоичная тройка 110 является оптимальной только тогда, когда решено, что предыдущая тройка должна быть 011 или 111, а последующая - 100 или 101, поскольку эти три тройки накладываются друг на друга следующим образом (см. таблицу в конце описания). Из 8х8х8 = 512 возможных решений, которые можно принять для трех последовательных троек независимо, логически непротиворечивыми являются только 2х8х2 = 32.
Последовательный алгоритм оценки последовательности максимального правдоподобия, известный под названием алгоритма Витерби, можно использовать для определения оптимальной логически непротиворечивой последовательности символов с указанными выше ограничениями. Из вышеизложенного можно видеть, что в двоичном случае есть только две допустимые тройки предшествующей последовательности для каждой возможной новой тройки. Алгоритм Витерби реализуется определением подсчетов, называемых метриками траектории, для каждой тройки из числа восьми возможных троек символов, представляющих аккумулированное на данный момент рассогласование между прогнозированными выборками сигналов и выборками принятого сигнала. Когда новый прогноз сравнивают с новой выборкой сигнала, новое рассогласование накапливается только с низшей из метрик траектории из ее двух возможных предшествующих последовательностей; и тогда результат становится новой метрикой траектории одной последовательности из нового набора из восьми последовательностей символов. Фактически низшую пару из числа этих пар метрик траектории можно пересчитать, чтобы нужно было запоминать только 4 значения для случая, когда выборки сигнала зависят от 3 битов. В общем алгоритм Витерби поддерживает MN-1 последовательностей символов кандидатов, которые называют "состояниями", где M - число разных значений символа в алфавите и N - число символов, от которых зависит каждая выборка сигнала.
Схематичное представление демодулятора ОПМП 16 состояний для двоичных символов в соответствии с данным изобретением изображено на фиг. 1. Ряд электронных элементов памяти упорядочены в группы, называемые состояниями, при этом число состояний составляет 2(n-1), где n - число последовательных символов данных, от которых зависит каждая выборка сигнала. Это также определяется длительностью импульсной характеристики канала. Память для каждого состояния содержит три разных типа информации: так называемая "битовая история", связанная с каждым состоянием; метрика траектории, связанная с каждым состоянием; и АРУ или параметр масштабирования, связанный с каждым состоянием. Нет необходимости в непосредственном хранении числа (n-1)-битового состояния, поскольку оно в неявном виде содержится в положении данных в памяти.
Важной частью декодера ОПМП является модель канала и соответствующие элементы процедуры модуляции передатчика, которые используют для прогнозирования значений выборок сигналов, которые нужно принять для данной переданной последовательности символов. Процесс модуляции является часто линейным, что можно представить линейной комбинацией R(i) = Co • S(i) + C1 • S(i-1) + C2 • S(i-2) ...+ C(n-2) • S(i-n+2), где Co, C1, C2...C(n-2) являются n-2 комплексными коэффициентами, и S(i), S(i-1) и пр. являются n-2 последовательно переданными битами значений +1 или -1. R(i) является прогнозированным комплексным принятым значением выборки для этой комбинации битов. Коэффициенты Cо. . . C(n-2) обычно устанавливают передачей тестовой комбинации символов данных, которая известна приемнику заранее. Этот код синхронизации или тестовая комбинация данных устанавливает комплексные коэффициенты, необходимые для модели канала либо в начале передачи, либо через регулярные интервалы во время передачи. Однако возможно, что уровень сигнала будет дрейфовать между этими интервалами, в результате чего прогнозированные значения будут отличаться в амплитуде от принятых выборок.
В примере для 16 состояний по фиг. 1 модель канала прогнозирует принимаемые значения I, Q,
которые должны зависеть от пяти последовательных символов: четырех неявно выраженных в номере состояний, и одного нового символа, который может быть либо 1, либо 0 и который еще не определен.
Прогнозированные значения сравнивают с принятыми значениями, и сумма квадратов разностей вычисляется следующим образом:
(Ip - Ir)2 + (Qp - Qr)2,
где суффикс p
относится к прогнозированному значению, а r - к принимаемому значению. Это рассогласование прибавляют к накопленному рассогласованию, запомненному для этого состояния, и сравнивают со значением,
вычисленным аналогично для номера состояния, которое отличается только позицией самого старшего разряда. Именно этот бит должен переместиться влево на одну позицию и выйти из пятибитового интервала,
который оказывает влияние на значения I, Q. Если номера состояний 0abc и 1abc сдвигаются влево, то с новым битом d они оба вырабатывают новый номер состояния abcd; и необходимо принять решение о
следующем: какая из накопленных метрик траектории двух первоначальных состояний плюс новое квадратичное рассогласование должна стать накопленной метрикой траектории для нового номера abcd состояния.
Это решение принимают по результату упомянутого сравнения и выбранного предшествующего состояния, выбранного из условия получения низшей метрики траектории. Кроме новой метрики траектории, выводимой
из выбранного предшествующего состояния, битовую предысторию слева от номера состояния (т.е. биты, которые старее битов номера состояния) также копируют из выбранного предшествующего состояния в новое
состояние. Этим обеспечивается то, что последовательность битов, запомненная относительно этого состояния, не противоречит метрике траектории, запомненной относительно этого состояния, т.е. эта
метрика траектории была действительно результатом связанной с ней последовательности битов.
С использованием выбора abc в двух сравниваемых состояниях 0abc и 1abc вместе с новым битом d, равным либо 1, либо 0, вычисляют новые значения для всех 16 состояний, и этим завершается одна итерация алгоритма для демодулирования одной выборки сигнала. Описанный выше процесс далее излагается поэтапно.
Для первого состояния, обозначенного 0000, определяют, что новый бит также является 0. Число 00000, таким образом, используют для модели канала для получения значений I, Q, которые ожидаются для приема при условии передачи 00000. Фактические принятые значения I, Q сравнивают с рассчитанными выше значениями и вычисляют квадратичное рассогласование. Квадратичное рассогласование прибавляют к метрике траектории для состояния 0000, чтобы получить одно из двух значений-кандидатов для метрики траектории для нового состояния 0000.
Изложенную выше операцию повторяют теперь для состояния 1000 при использовании нового 0 для получения второго значения-кандидата для новой метрики траектории. Две метрики-кандидата траектории затем сравнивают и выбирают низшую метрику траектории. Битовая предыстория из выбранного предшествующего состояния, т.е. 0000 или 1000 затем становится битовой предысторией для нового состояния 0000. Помимо этого символьная предыстория смещается влево на одну позицию, и самый старший разряд предшествующего состояния смещается в первую позицию.
Всю процедуру повторяют при условии, что новый бит равен 1. Это в результате дает новое состояние 0001, которое также имело возможные предшествующие состояния 0000 и 1000.
Вся процедура повторяется для каждой пары предшествующих состояний, таких как 0001 и 1001 (что в результате дает новые состояния 0010 и 0011), 0010 и 1010 (что в результате дает новые состояния 0100 и 0101), 0011 и 1011 (что дает новые состояния 0110 и 0111), и т.д.
В конце каждой такой итерации обработана принятая выборка I, Q и демодулирован один дополнительный бит. Поскольку предыстории битов переписывают другие битовые предыстории, когда выбрана одна пара состояний, более старые биты в памяти битовой предыстории имеют тенденцию сходиться к одному биту. Если наиболее старый бит во всех битовых предысториях согласуется, то ясно, что неопределенности далее не будет, и его можно извлекать в качестве окончательного решения, тем самым сокращая битовые предыстории на один бит. Если этого не происходит до заполнения памяти располагаемой битовой предыстории, то выполняют обычную процедуру выбора, в качестве окончательного решения, наиболее старого бита из состояния с низшей суммарной метрикой, отбрасывая старейшие биты из других состояний. Возможны и другие варианты, например запоминание в памяти предысторий указателей, формирующих связный перечень, из которого предысторию любого состояния можно проследить в обратном порядке.
Этот алгоритм действует до тех пор, пока коэффициенты, использованные в модели канала для прогнозирования значений I, Q, являются корректными. В патентах США N 5136616 и 5093848 предлагается корректировать прогнозированные или принятые значения для компенсации ухода фазы сигнала во время демодуляции, которая в отсутствие такой коррекции обусловит расхождение прогнозированных значений от принятых значений и последующую дисфункцию. В этих патентах значение корректировки фазы предлагается запоминать для каждого состояния. Их используют для фазового сдвига прогнозированных или принятых значений I, Q относительно друг друга для корректировки ухода фазы. Кроме этого предлагалось обновлять значения корректировки фазы всякий раз при обработке выборки сигнала в таком направлении и на такую величину, которая обеспечивает лучшее согласование прогнозированного значения с выборкой принятого сигнала. Для каждого состояния необходимо отдельное значение корректировки фазы по той причине, что только одно состояние содержит истинный постулат принятой последовательности данных, при том что прочие являются ошибочными, но еще не обработано достаточное количество информации для определения истинного постулата среди других. Значение фазы можно, таким образом, обновлять исходя из допущения, что постулат последовательности битов в связанном с ним номере состояния является истинным. Если одно из пары состояний отобрано в качестве предпочтительного предшественника нового состояния, то соответствующее значение корректировки фазы также выбирается в качестве значения корректировки фазы для нового состояния, и обновляется. Таким образом, значение корректировки фазы, связанное с состоянием, которое содержит истинную последовательность, будет вычислено и обновлено с использованием истинной последовательности битов. Для всех состояний соответствующее значение корректировки фазы будет сформировано обновлениями с использованием значений битов в связанной предыстории в предположении, что они правильные. Каждое значение корректировки фазы при этом сохраняется непротиворечивым с другими элементами, запомненными для соответствующего состояния, в том что все они базируются на одном и том же предположении, что соответствующая последовательность битов является истинной.
В данном изобретении аналогичный метод используется при корректировке принятого сигнала по уходу амплитуды. Коэффициент АРУ или коэффициент масштабирования запоминают для каждого состояния, как показано на фиг. 1. Коэффициент АРУ используют для масштабирования принятого сигнала или прогнозированных значений при сравнении для уменьшения рассогласования. Коэффициенты АРУ обновляют при этой процедуре обработки в таком направлении и на такую величину, чтобы еще больше уменьшить рассогласование. Эта процедура обработки излагается ниже.
При применении коэффициента масштабирования "a" к принятым
значениям Ir, Qr квадратичное рассогласование определяют как
(Ip-a • Ir)2 + (Qp-a • Qr)2. (1)
Путем дифференцирования по "a" и приравнивания к
нулю получают оптимальное значение "a"
Если сигнал и прогнозируемые значения выразить в полярных координатах (Rr, Ar) (Rp, Ap), то выражение для "a" будет иметь следующий вид:

Полученное выражение подходит для использования логарифмически полярной обработки сигнала.
При применении коэффициента масштабирования "a"
к прогнозируемым значениям квадратичное рассогласование определяют как
(Ir-a • Ip)2 + (Qp-a • Qp)2. (3)
Путем дифференцирования по "а" и
приравнивания к нулю можно получить оптимальное значение для "а"
Если сигнал и прогнозируемые значения выразить в полярных координатах (Rr, Ar) (Rp, Ap), то выражение для "а" принимает следующий вид:

что также подходит для использования логарифмически полярной обработки сигнала.
Однако обоим этим способам свойственны преимущества и недостатки. Недостаток первого способа в том, что знаменатель IrIr + QrQr может принять нулевое значение, так как Ir и Qr подвергаются воздействию шумов приемника. Недостатком можно также считать то, что при замираниях сигналa значения Ir, Qr сигналов увеличиваются на коэффициент масштабирования, в результате чего зашумленный сигнал вносит в метрику вклад в той же степени, что и ранее. С другой стороны, второй способ снижает вклад в метрику составляющих сигнала с замираниями, но, вероятно, в чрезмерно большой степени, в результате чего сигнал с замираниями должным образом не декодируется, даже если его отношение "сигнал-шум" все еще хорошее.
Поэтому предложена метрика, в которой значения сигнала и прогнозируемых значений масштабируют в противоположных
направлениях
(a • Ir-Ip/a)2 + (a • Qr - Qp/a)2. (5)
При дифференцировании этого выражения по "а" и приравнивании к нулю получают оптимальное
значение для "а" в следующем виде:
a4 = (Ir2 + Or2)/(Ip2 + Qp2) = Rr2/Rp2 или LOG(a) = [LOG(Rr) - LOG(Rp)] /2
(6)
Если выражение (5) для рассогласования выразить в полярных координатах, то получим
a2Rr2 + Rp2/a2 - 2 • Rp • Rr •
Cos (Ar-Ap). (7)
Первая составляющая одинакова для всех номеров состояния, не влияет на выбор оптимальных состояний предшественника и может не учитываться при расчете метрики. Но может
оказаться полезным отдельное накопление значений этой составляющей для формирования истинного окончательного значения метрики в конце ряда циклов обработки.
Вторую составляющую можно
подсчитать при задании LOG(a) и прогнозируемых значений в логарифмически полярном виде следующим образом:
ANTILOG {2[LOG(Rp)-LOG(a)]}. (8)
Функцию ANTILOG можно реализовать на
соответствующем компьютере с помощью просмотровой таблицы в ПЗУ.
Последнюю составляющую можно вычислить следующим образом:
ANTILOG {LOG(Rp)+LOG(Rr) + LOG2COS(Ar-Ap)}. (9)
Функцию LOG2COS2 можно также реализовать с
использованием просмотровой таблицы вычисленных заранее значений логарифма удвоенного косинуса угла.
Значение "а", определяемое выражением (6), является текущим значением, но текущие значения не являются наилучшими значениями для использования при вычислении выражения (7). Если текущие значения подставить из выражения (6) в выражение (7), то получим, что "а" уничтожается, и поэтому коэффициент АРУ не нужен. Хотя это является альтернативой масштабированию в принципе, т.е. определению амплитудно-инвариантной метрики, однако эффективность данного метода не столь высока по сравнению с тем, когда при вычислении выражения (7) используют сглаженное значение "а" вместо текущих значений.
Обозначив текущее
сглаженное значение "а" в номере k состояния как a(k, n), а обновленное значение как a(k, n+1), соответствующее обновленное уравнение можно получить в виде
a(k, n+1) = a(k, n) + (a - a(k,
n))/2m,
где "а" - значение, вычисленное из уравнения (6); 2m - выбрано для упрощения деления в виде правого сдвига на m позиций. Значение m определяет, насколько быстро
демодулятор адаптируется к изменениям в амплитуде сигнала. В тех случаях, когда используют логарифмически-полярные вычисления, целесообразно сохранять значение LOG(a), определяемое уравнением (8).
Обозначив текущий логарифм "а" для состояния k как La(k, n) и обозначив следующее значение как La(k, n+1), соответствующее уравнение обновления получим в следующем виде:
La(k,
n+1) = La(k, n) + (LOG(a) - La(k, n))/2m.
Путем подстановки LOG(a) из (6) получим
La(k, n+1) = La (k, n) + (LOG(Rr)/2 - LOG(Rp)/2 - a(k, n))2m. (10)
Решение этого уравнения можно реализовать в цифровой логике с помощью арифметических операций с фиксированной запятой с использованием только операций сложения, вычитания и сдвига.
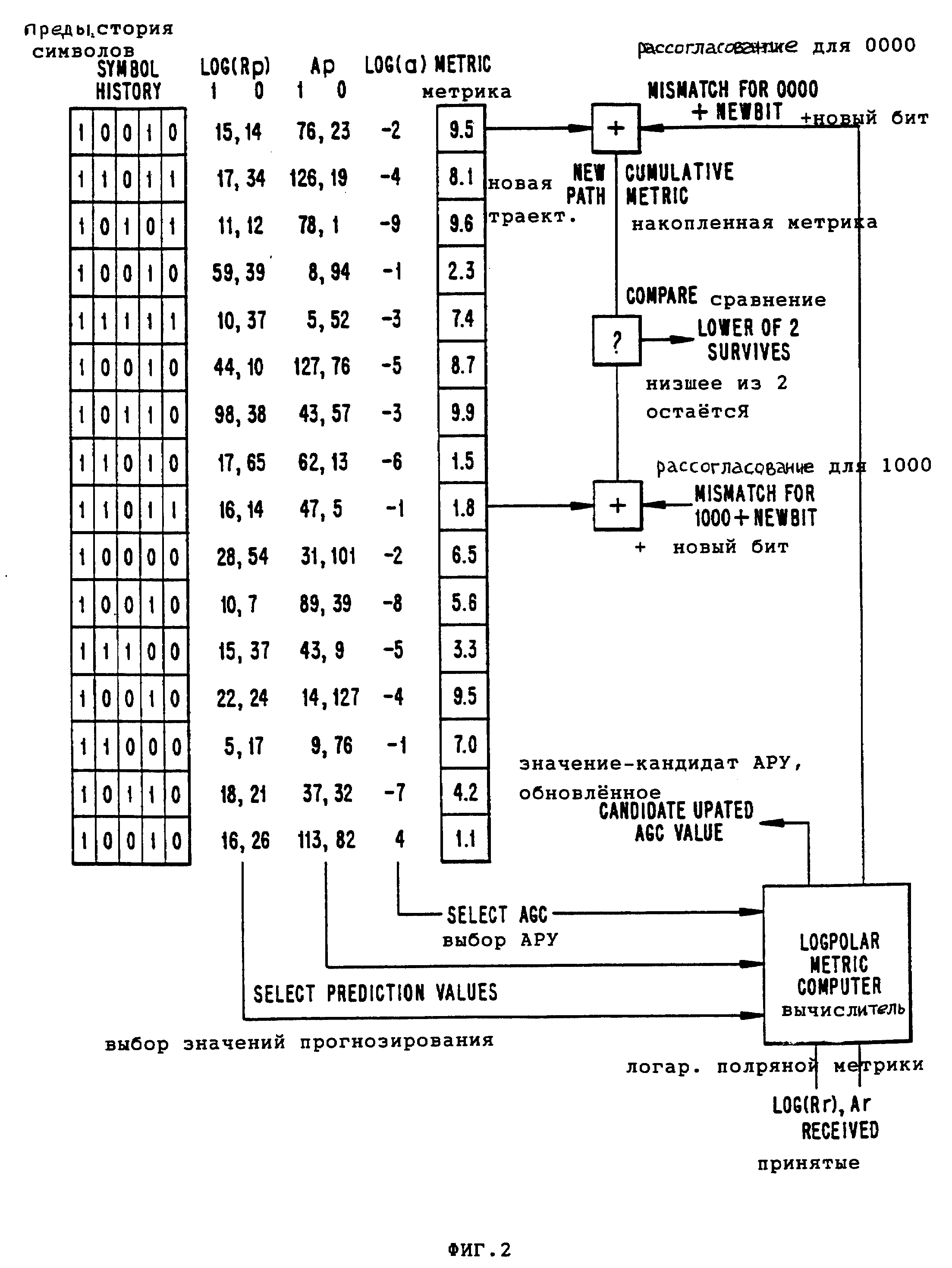
Для реализации с использованием логарифмической полярной обработки сигнала может быть использована структура демодулятора, показанная на фиг. 2, когда логарифмически полярные прогнозируемые значения Lp=LOG(Rp) и Ap, и логарифмические значения La(k) АРУ распределены согласно соответствующим им состояниям. Изображенные в качестве примера значения для логарифма прогнозированной амплитуды LOG(Rp) для каждого состояния предполагают 8-битовое целочисленное представление натурального логарифма Rp в формате xxxx, xxxx, в то время как для значения Ap фазы предполагается, что пределы от 0 до 2π представлены величинами целых чисел от 0 до 127. Представление LOG(a) значений АРУ то же, что и для LOG(Rp).
Функционирование демодулятора со структурой по фиг. 2 далее излагается со ссылками на фиг. 3. Предполагается, что значения LOG(Rp), Ap логарифмически полярного прогнозируемого значения уже определены для всех возможных 5-битовых последовательностей, например путем передачи известной тестовой комбинации для демодулятора.
Для первого состояния (0000) постулируют, что новым битом является 0, и пару прогнозируемых значений LOG(Rp), Ap выбирают для случая, когда новый бит = 0, и подают на вычислитель логарифмически полярной метрики вместе со значением LOG(a) АРУ для данного состояния и принятыми логарифмически полярными значениями сигнала LOG(Rr), Ar.
Вычислитель 20 метрики вычисляет квадратичное рассогласование с использованием уравнений (7), (8) и (9) и просмотровых таблиц для ANTILOG и LOG2COS. Полученное рассогласование прибавляют к метрике траектории для состояния 0000, чтобы получить одно из двух значений-кандидатов для метрики траектории для нового состояния 0000. Вычислитель 20 метрики также определяет обновленное значение-кандидат АРУ с помощью, например, уравнения (10).
Указанные операции повторяют с использованием состояния 1000 с постулатом нового 0 для получения второго значения-кандидата для новой метрики траектории и второго значения-кандидата для обновленного значения АРУ.
Затем сравнивают две метрики-кандидаты траектории и выбирают низшую метрику траектории. Битовая предыстория и обновленное значение АРУ из выбранного предшествовавшего состояния (0000 или 1000) затем становятся битовой предысторией и значением АРУ для нового состояния 0000. Кроме того, битовая предыстория смещается на одну позицию влево, и самый старший разряд предшествовавшего состояния сдвигается в первую позицию.
Процедура повторяется с постулатом о том, что новый бит имеет значение 1. В результате этого получается новое состояние 0001, возможными предшественниками которого явились 0000 и 1000.
Процедура затем повторяется для каждой пары предшественников, таких как 0001 и 1001 (что дает новые состояния 0010 и 0001), 0010 и 1010 (что дает новые состояния 0100 и 0101), 0011 и 1011 (что дает новые состояния 0110 и 0111), и т.д.
Возможны также другие реализации вычислителя метрики с использованием декартовa представления (I, Q), при этом преобразование логарифмически полярного представления в декартово осуществляется при помощи просмотровых таблиц.
С помощью логарифмически полярной арифметики возможны также другие конфигурации вычислителя метрики. На фиг. 4
представлена конфигурация, в которой значение (Rp/a)2 запоминают вместо LOG(a), и непосредственно обновляют вместо обновления LOG(a). При обозначении запомненного значения как Ra
соответствующее уравнение обновления принимает следующий вид:
Ra(n+1)=Ra(n) + (Rp3/Rr-Ra(n)/2m,
которое решают с использованием логарифмического вычисления
Rp3/Rr.
Важным фактором при создании вычислителей метрики указанного выше типа является динамический диапазон значений квадратичных рассогласований и метрик траектории и вытекающая отсюда длина слов, используемая в арифметических операциях. Эту проблему можно решить одним из двух путей: использование логарифмической арифметики также для значений метрики, предварительное масштабирование всего блока выборок, принятого между тестовыми комбинациями демодулятора относительно максимальной амплитуды. Последний способ несколько проще и поэтому предпочтителен при осуществлении. Способ масштабирования блока осуществляется следующим образом.
Приемник фиксирует блок принятых комплексных выборок, которые могут легко преобразовываться в цифровую форму логарифмически полярным способом. Преимущество этого способа в том, что амплитуды выборок имеются в логарифмическом виде, в результате чего для масштабирования относительно максимальной амплитуды требуется просто найти максимальную логарифмическую амплитуду и затем ее вычесть из остальных логарифмических амплитуд в блоке. Максимальная амплитуда Rr равна 1. Затем приемник, предпочтительно используя известные символы данных, содержащихся в зарегистрированном блоке выборок, приступает к определению прогнозируемых значений логарифмической амплитуды и значений фазы LOG(Rp) и Ap для каждой возможной последовательности символов в пределах конечной длительности импульсной характеристики канала. Эти значения Rp будут того же порядка, что и Rr, по меньшей мере вблизи известных тестовых символов, использованных для их вычисления, и вблизи единицы, но меньше ее. Поэтому первоначальное значение "a" является единицей, а LOG(a) первоначально является нулем, причем Rp • Rp/a также будет иметь значение порядка единицы. Член 2Rr • Rp • cos (Ar-Ap) будет порядка 2, в результате чего квадратичное рассогласование будет иметь значение вблизи -1 для хорошего согласования и +3 для плохого согласования. Причиной этого является отбрасывание обязательного члена (aRr)2 из метрики, и это гарантирует положительный результат между нулем и четырьмя. Поэтому метрики имеют тенденцию к возрастанию в отрицательной области, но этого можно избежать разными методами, например прибавлением 1 в каждой итерации; вычетом наименьшего (наиболее отрицательного) значения метрики из остальной части при каждой итерации; вычитанием метрики только в том случае, если она обнаруживает потерю значимости из всех метрик.
Таким образом, с использованием метода масштабирования блока и одного из упомянутых методов ограничения роста метрики можно удерживать динамический диапазон или длину слова, необходимые для вычислений метрик, в пределах практически приемлемых значений, например 16 битов или меньше. Далее посредством адаптивного масштабирования с помощью коэффициента масштабирования, отдельно адаптированного для каждого состояния Витерби в демодуляторе, модулятор можно сделать нечувствительным к изменениям уровней принимаемого сигнала при выполнении масштабирования блока или пересчете прогнозируемых значений.
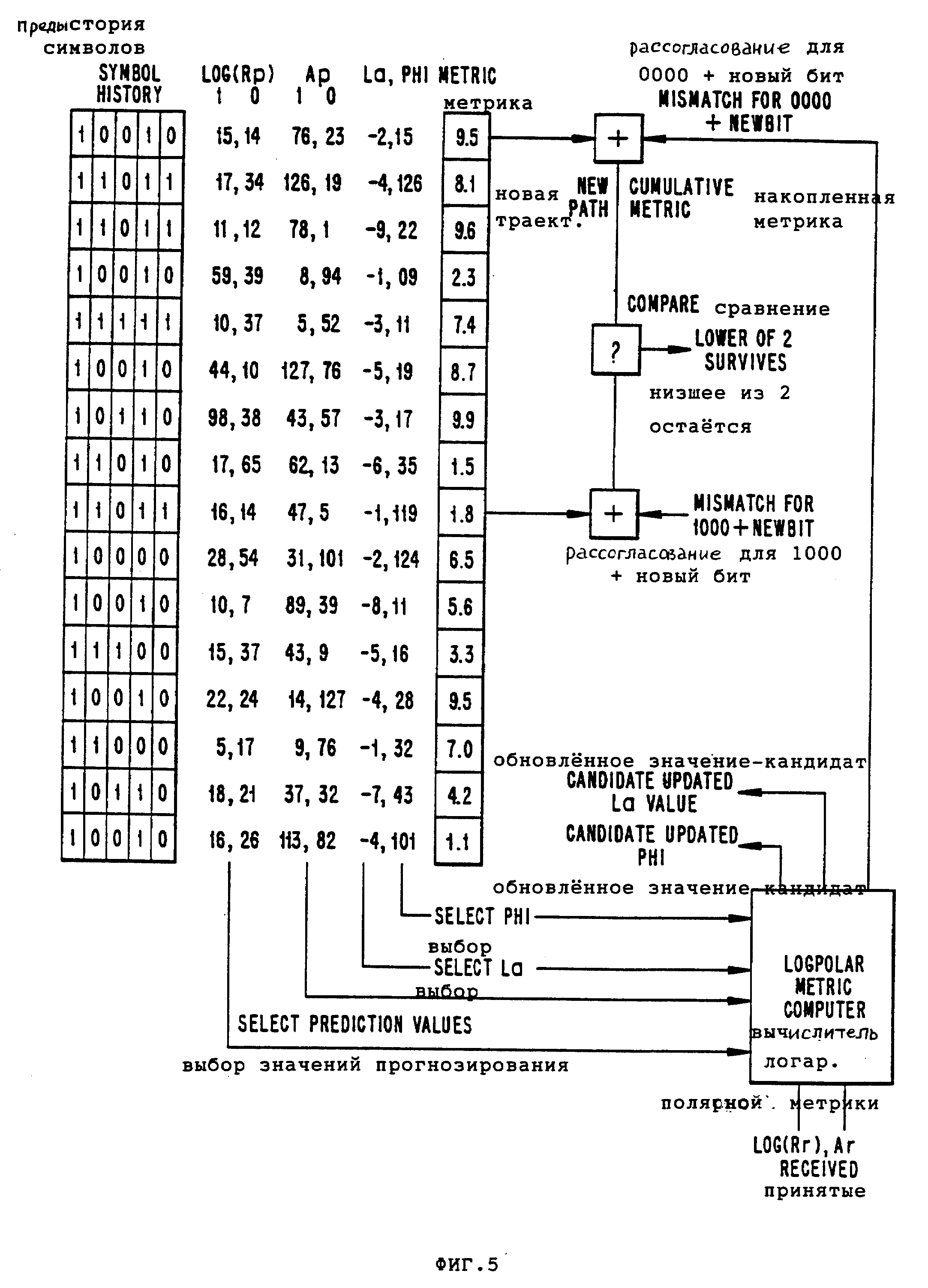
Данное изобретение позволяет без каких-либо затруднений совместно с ним использовать способ автоматической подстройки частоты, раскрытый в патентах США N 5136616 и 5093848, для создания демодулятора, отслеживающего изменения фазы и амплитуды в блоке обрабатываемых выборок сигнала. Структура декодера с одновременным АПЧ и АРУ для каждого состояния показана на фиг. 5.
Запоминание значения АРУ (La=LOG(a)) теперь группируют в пары со связанным значением корректировки фазы или значениями АПЧ (ϕ). Значения АРУ используют в вычислителе метрики в соответствии с приведенным выше описанием, в то время как значения ϕ используют при суммировании по модулю 2π с принятыми значениями Ar фазы для их корректировки в целях компенсации нарастающего ухода перед осуществлением сравнения с предсказанными знамениями Ap фазы. Значения АПЧ (ϕ) обновляют поворотом (сдвигом фазы) их в том направлении, которое обеспечивает лучшее согласование принятых значений Ar с прогнозируемыми значениями Ap. Таким же путем, как получены два обновленных значения-кандидата АРУ для каждого нового состояния, получают и два обновленных значения АПЧ; и значение, выбранное для нового состояния, соответствует предшествовавшему состоянию, выбранному для получения низшей метрики. Во многих случаях применения достаточен очень простой способ обновления значений ϕ. Если значение Ar+ϕ-Ap положительное, т.е. от 1 до 63, если используют 7-битовые значения фазы, то ϕ уменьшается на один младший разряд, а если значение Ar+ϕ-Ap отрицательно, т.е. от 64 до 127 при использовании 7-битовых значений фазы, то ϕ увеличивается на один младший разряд.
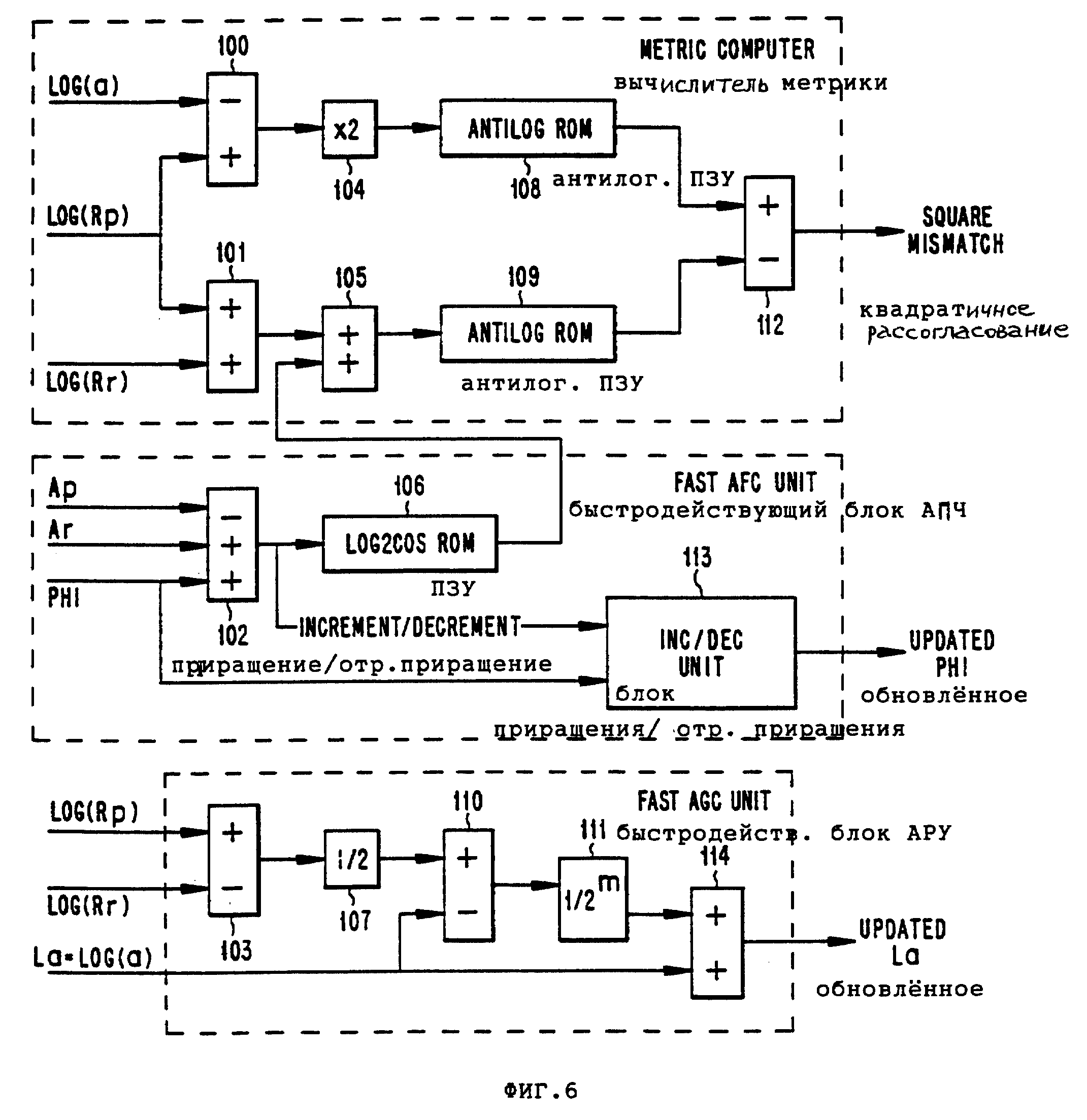
Структура вычислителя метрики, который осуществляет одновременное масштабирование АРУ и отслеживание фазы АПЧ, изображена на фиг. 6. Принятые логарифмически полярные данные Log(Rr), Ar преобразуют в цифровую форму и запоминают в памяти соответственно одному сегменту сигнала (например, пачка сигналов системы многостанционного доступа с временным разделением каналов). Наибольшее значение Log(Rr) в блоке данных можно определить вне вычислителя, показанного на фиг. 6, и вычесть из всех значений Log(Rr), тем самым обеспечивая нормировку амплитуды вектора максимальным значением. Прогнозируемые значения (фиг. 5) затем вычисляют с использованием известной комбинации синхрослова, введенного в сегмент сигнала, посредством процедуры оценки канала, например корреляцией с известной комбинацией символов. Прогнозируемые значения, не модифицированные масштабированием, первоначально являются наилучшими возможными значениями для использования, если демодуляция производится начиная с данных вблизи синхрослова. Ввиду возможного дрейфа амплитуды и фазы относительно данных синхрослова масштабирование и фазу, тем не менее, нужно обновлять в процессе демодуляции, как предусмотрено настоящим изобретением.
Реализуемая метрика описывается уравнением (7); при этом первый член отбрасывают, так как он не зависит от решений по символам. Второй член (Rp/a)2 вычисляют с использованием значений Log(Rp) и Log(a), где "a" является коэффициентом масштабирования. Первоначальное значение Log(a) устанавливают равным нулю (a=1). Блок вычитания 100 вычитает Log "a" из Log величины Rp для получения Log отношения Rp/a. Сдвиг влево на один бит в регистре сдвига 104 удваивает значение до Log квадрата. ПЗУ антилогарифмов 108 вычисляет экспоненциальный результат для получения величины квадрата.
Параллельно вычисляют последний член уравнения (7). Блок вычитания 102 вычисляет разность фаз между прогнозом Ap фазы и принятой фазой Ar и также прибавляет составляющую ϕ отслеживания фазы, которая первоначально равна нулю. ПЗУ 106 содержит просмотровую таблицу для логарифмов двойного косинуса этой разности фаз. Сумматор 101 суммирует значения логарифмических величин Rp и Rr, а сумматор 105 прибавляет из суммы к результату LOG2COS, запомненному в ПЗУ 106, для получения логарифма величины 2RpRr×cos(Ar-Ap+ϕ). ПЗУ антилогарифмов 109, которое, как ясно специалистам в данной области техники, физически может быть тем же, что и ПЗУ 108, используемое с разделением во времени, затем используют для получения значения указанного выражения. Полученный результат вычитают из значения, полученного из ПЗУ 108, для получения метрики квадратичного рассогласования, используемой при обработке с использованием алгоритма Витерби (фиг. 5). Затем обновляют значение масштабирования Log(a) и компенсацию π дрейфа фазы.
Значение масштабирования обновляют в соответствии с уравнением (10). Блок вычитания 103 формирует разность логарифма от Rp и логарифма от Rr, в результате чего формируется логарифм отношения Rp/Rr. Затем регистр 107 сдвига вправо делит разность на два для получения логарифма квадратного корня Rp/Rr в соответствии с уравнением (6). Затем Log(a) обновляют до этого значения путем вычисления разности между Log(a) и целевым значением в блоке вычитания 110 путем сдвига вправо результата на m позиций в регистре 111 сдвига вправо для получения величины 1/2m от разности, и затем суммирования Log(a) с квадратным корнем Rp/Rr прибавлением дроби к Log(a) в сумматоре 114. Обновленное значение является только одним значением из новых значений-кандидатов, которое еще предстоит выбрать для получения обновленного значения Log(a) для определенного состояния Витерби. Алгоритм Витерби, иллюстрирующий фиг. 5, обеспечивает выбор наилучшего предшествующего состояния для каждого будущего нового состояния, в результате чего получают низшую накопленную метрику для нового состояния. Обновленное значение Log(a), вычисленное для выбранного состояния предшественника, т.е. значение, вычисленное с помощью прогнозируемых значений Log(Rp), Ap из выбранного состояния, является значением, которое записывают в память La для нового состояния.
Значение ϕ отслеживания фазы также обновляют в некотором направлении, чтобы уменьшить рассогласование между прогнозированными фазами Ap и принятыми фазами Ar. Это рассогласование определяют блоком 102 суммирования, по модулю 2π и вычитания, который содержит корректировку прогноза путем прибавления текущего значения ϕ. Если результат является положительным, т.е. соответствует углу между 0 и +180o, то значение ϕ слишком велико. С другой стороны, если результат является отрицательным, то значение ϕ следует увеличить. Эти изменения ϕ осуществляют блоком 113 положительного/отрицательного приращения. Результатом является один кандидат для обновленного значения ϕ и кандидат, который будет выбран для получения обновленного значения ϕ, так как новое состояние выбирают одновременно с выбором кандидата Log(a). Значения ϕ и La, другими словами, выбирают для одной и той же итерации вычислителя, причем имеется в виду итерация, сформировавшая низшую накопительную метрику для нового состояния. Итак, данное изобретение гарантирует, что обновление значений АРУ и отслеживания фазы происходит с помощью оптимальной последовательности символов, которая будет окончательно выбрана согласно алгоритму Витерби в качестве демодулированного выхода.
Изложенное описание описывает систему отслеживания фазы первого порядка. Системы отслеживания фазы второго порядка можно также использовать для обеспечения большего допуска ошибки частоты, как это раскрыто в патентах США N 5136616 и 5093848.
Специалистам в данной области техники ясно, что данное изобретение может быть осуществлено в других конкретных вариантах без изменения сущности. Раскрытые здесь варианты осуществления поэтому следует считать иллюстративными, а не ограничивающими. Объем изобретения определяется формулой изобретения, а не изложенным выше описанием; и все изменения, соответствующие смыслу изобретения и входящие в диапазон его эквивалентов, должны входить в объем данного изобретения.
Реферат
Заявлен способ демодулирования или декодирования модулированного цифровым способом сигнала данных, в котором параметры АРУ сохраняют и обновляют или отбрасывают параллельно с определением комбинации данных, переданных с наибольшей вероятностью, что является техническим результатом. Сначала принятые сигналы преобразуют из аналоговых в цифровые для получения цифровых выборок сигналов. Цифровые выборки затем сравнивают со значениями выборок, ожидаемыми для каждой последовательности из ряда возможных последовательностей символов, с использованием коэффициента масштабирования, связанного с каждой из последовательностей символов, для определения значения рассогласования для каждой последовательности. Значения рассогласования являются логически самосогласованными. Затем низшее накопленное значение рассогласования выбирают из всех предшествующих последовательностей, которые могут логически предшествовать новой последовательности, накапливаемой при значении рассогласования для этой новой последовательности, при этом выбранное рассогласование идентифицирует наилучшую предшествующую последовательность. Затем выбирают коэффициент масштабирования, связанный с этой наилучшей предшествующей последовательностью, и обновляют этот коэффициент масштабирования для получения коэффициента масштабирования, связанного с этой новой последовательностью. 6 с. и 19 з.п. ф-лы, 1 табл., 6 ил.

Формула
11. Способ по п.1, отличающийся тем, что упомянутые выборки цифрового сигнала формируют в виде комплексных пар чисел, состоящих из действительной и мнимой частей.

Комментарии