Электрифицированный инструмент - RU2555315C2
Код документа: RU2555315C2
Чертежи






Описание
ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
Эта международная заявка претендует на приоритет заявки на патент Японии № 2009-298292, поданной в Патентное бюро Японии 28 декабря 2009 года, содержание которой включено посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к электрифицированному инструменту.
УРОВЕНЬ ТЕХНИКИ
Стандартный кусторез включает в себя батарею, электрический двигатель и фрезу (например, режущую пластину, режущую головку с нейлоновым кордом и т.д.), причем он сконфигурирован так, что фреза соединена с приводным валом электрического двигателя через механизм передачи приводного усилия (то есть зубчатая передача, трансмиссионный вал и т.д.).
В указанном кусторезе требуется быстрое прекращение вращения электрического двигателя, а значит, фрезы после того, как поступила команда останова электрического двигателя.
В качестве способа прекращения вращения фрезы в Патентном документе 1 представленном ниже, используется рекуперативное торможение. При рекуперативном торможении, когда отключают ток в обмотке электрического двигателя, и концы этой обмотки замыкают накоротко, на роторе электрического двигателя создается большое тормозное усилие. То есть вращение ротора, а значит, вращение фрезы, можно быстро остановить посредством рекуперативного торможения.
ДОКУМЕНТЫ, ХАРАКТЕРИЗУЮЩИЕ ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
ПАТЕНТНЫЙ ДОКУМЕНТ
Патентный документ 1: опубликованная непроверенная заявка на патент Японии № 08-66074.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ПРОБЛЕМЫ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
При быстром прекращении вращения ротора электрического двигателя в вышеописанном кусторезе к механизму передачи приводного усилия (а значит, к полой трубке) прикладывается отдача, вызванная кинетической энергией фрезы. Указанная отдача может стать одной из причин ухудшения удобства использования кустореза.
Таким образом, целью изобретения является обеспечение электрифицированного инструмента, который способен нивелировать ухудшение удобства использования электрифицированного инструмента из-за торможения электрического двигателя.
СРЕДСТВА РЕШЕНИЯ ПРОБЛЕМ
Электрифицированный инструмент по настоящему изобретению, созданный для достижения вышеописанной цели, включает в себя электрический двигатель, устройство определения скорости вращения, тормозное устройство и активирующее устройство на основе скорости вращения.
В электрифицированном инструменте электрический двигатель создает приводное усилие для вращения объекта, подлежащего приведению в движение, в то время как устройство определения скорости вращения определяет скорость вращения электрического двигателя. Когда скорость вращения, определенная устройством определения скорости вращения, становится равной или меньшей, чем заданная скорость вращения, которую устанавливают произвольным образом, после выдачи команды останова для отключения подачи электрического тока в электрический двигатель, активирующее устройство на основе скорости вращения активирует тормозное устройство, и тормозное устройство осуществляет управление торможением для торможения электрического двигателя.
В частности, в электрифицированном инструменте управление торможением выполняется после ожидаемого снижения скорости вращения электрического двигателя, то есть снижения кинетической энергии объекта, подлежащего приведению в движение, в процессе его вращения после выдачи команды останова.
Таким образом, в электрифицированном инструменте может быть уменьшена отдача, прикладываемая к электрифицированному инструменту в результате торможения электрического двигателя, поскольку торможение электрического двигателя выполняется после того, как скорость вращения электрического двигателя уменьшится до заданной скорости вращения. То есть согласно предложенному электрифицированному инструменту можно нивелировать ухудшение удобства использования электрифицированного инструмента, являющегося результатом торможения электрического двигателя.
Электрифицированный инструмент согласно настоящему изобретению также может включать в себя активирующее устройство на основе времени, которое активирует тормозное устройство, когда истекло время с момента выдачи команды останова до начала управления торможением, длительность которого устанавливается произвольно.
В этом случае, если даже скорость вращения электрического двигателя будет больше, чем заданная скорость вращения, управление торможением может выполняться после того, как истекло установленное произвольным образом время с момента выдачи команды останова.
Заданное значение скорости вращения может быть установлено в зависимости от режима использования электрифицированного инструмента. В этом случае электрифицированный инструмент по настоящему изобретению может включать в себя устройство установки заданной скорости, которое устанавливает заданную скорость вращения.
Электрифицированный инструмент по настоящему изобретению, кроме того, может включать в себя устройство вычисления интенсивности снижения, которое последовательно вычисляет интенсивность снижения, представляющий собой интенсивность снижения скорости вращения электрического двигателя в течение единичного периода времени, в соответствии с результатом определения скорости, полученным устройством определения скорости вращения. В этом случае устройство задания заданной скорости может быть сконфигурировано для установки заданной скорости вращения на основе интенсивности снижения скорости, вычисленного устройством вычисления интенсивности снижения скорости. Устройство установки заданной скорости в качестве заданного значения скорости может устанавливать тем большее значение, чем больше упомянутая интенсивность снижения скорости.
Также электрический двигатель может быть сконфигурирован с возможностью вращения в прямом направлении и в обратном направлении. В этом случае устройство установки заданной скорости предпочтительно устанавливает заданную скорость вращения отдельно для вращения в прямом направлении и отдельно для вращения в обратном направлении. В случае использования устройства установки заданной скорости, сконфигурированного, как было описано выше, заданная скорость вращения может устанавливаться произвольным образом отдельно для вращения в прямом направлении и отдельно для вращения в обратном направлении.
Время до начала управления торможением может быть установлено в зависимости от режима использования электрифицированного инструмента. В этом случае электрифицированный инструмент по настоящему изобретению предпочтительно включает в себя устройство установки времени, которое устанавливает время до начала управления торможением.
При использовании вышеописанной конфигурации электрифицированного инструмента время до начала управления торможением может быть установлено автоматически самим электрифицированным инструментом.
Кроме того, электрифицированный инструмент по настоящему изобретению может включать в себя устройство вычисления интенсивности снижения, которое последовательно вычисляет интенсивность снижения, представляющий собой интенсивность снижения скорости вращения электрического двигателя в течение единичного периода времени, в соответствии с результатом определения скорости, полученным устройством определения скорости вращения. В этом случае устройство установки времени предпочтительно сконфигурировано для установки времени до начала управления торможением на основе интенсивности снижения скорости, вычисленного устройством вычисления интенсивности снижения.
Согласно электрифицированному инструменту, сконфигурированному так, как было описано выше, можно установить время до начала управления торможением в зависимости от интенсивности снижения скорости вращения электрического двигателя в течение единичного периода времени.
Устройство установки времени в качестве времени до начала управления торможением предпочтительно устанавливает тем более короткий временной отрезок, чем больше интенсивность снижения.
Электрифицированный инструмент по настоящему изобретению может включать в себя переключатель команды скорости вращения для установки значения команды скорости вращения электрического двигателя и устройство получения значения команды, которое получает значение команды, установленного переключателем команды скорости вращения. В этом случае устройство установки времени может установить время до начала управления торможением на основе скорости вращения в момент отключения, которая представляет собой скорость вращения, при которой значение команды, полученное устройством получения значения команды, оказывается в диапазоне остановки, в котором считается, что имеет место команда на остановку электрического двигателя.
Согласно сконфигурированному, как было описано выше, электрифицированному инструменту по настоящему изобретению время до начала управления торможением можно установить в зависимости от режима использования электрифицированного инструмента, когда выполняется попытка прекращения вращения электрического двигателя. В этом случае устройство установки времени в качестве времени до начала управления торможением предпочтительно устанавливает тем больший временной отрезок, чем больше скорость вращения в момент отключения.
При вышеуказанной конфигурации устройства установки времени можно подождать, пока не истечет тем более длинный временной отрезок, чем выше скорость вращения в момент отключения, а затем выполнить управление торможением.
Электрифицированный инструмент может включать в себя датчик, который непосредственно определяет скорость вращения в момент отключения, или может включать в себя устройство оценки, которое оценивает скорость вращения в момент отключения на основе значения команды, полученного устройством получения значения команды.
При наличии устройства оценки оно предпочтительно дает тем большую оценку значения скорости вращения в момент отключения, чем больше значение команды перед заданным моментом времени, когда значение команды оказывается в диапазоне останова.
Также один из объектов, подлежащих приведению в движение, может быть выбран из множества типов объектов, подлежащих приведению в движение, и электрифицированный инструмент может быть сконфигурирован так, что объект, подлежащий приведению в движение, который выбирают из множества типов объектов, подлежащих приведению в движение, является объектом, который можно присоединить к электрифицированному инструменту. В этом случае устройство установки времени предпочтительно сконфигурировано для установки, в качестве времени до начала управления торможением электрифицированного инструмента, времени до начала управления торможением, соответствующим объекту, подлежащему приведению в движение, с максимальной инерционностью среди множества типов объектов, подлежащих приведению в движение.
При наличии устройства установки времени, сконфигурированного, как было описано выше, можно так начать торможение электрического двигателя, что будет обеспечено подавление отдачи, являющейся результатом торможения электрического двигателя, независимо от того, какой объект из множества типов объектов, подлежащих приведению в движение, присоединен к электрифицированному инструменту.
Кроме того, электрический двигатель может быть сконфигурирован с возможностью вращения в прямом направлении и вращения в обратном направлении. В этом случае устройство установки времени предпочтительно сконфигурировано для установки времени до начала управления торможением отдельно для вращения в прямом направлении и отдельно для вращения в обратном направлении.
При наличии сконфигурированного вышеописанным образом устройства установки времени можно установить подходящее время до начала управления торможением отдельно для вращения в прямом направлении и отдельно для вращения в обратном направлении.
Например, когда электрифицированный инструмент сконфигурирован так, что его скорость вращения в обратном направлении ниже, чем скорость вращения в прямом направлении, предпочтительно установить время до начала управления торможением для вращения в прямом направлении более коротким, чем время до начала управления торможением для вращения в прямом направлении.
То есть, если даже электрический двигатель вращается в обратном направлении с максимальной скоростью, кинетическая энергия объекта, приводимого в движение во время вращения, будет меньше, чем в случае вращения электрического двигателя в прямом направлении с максимальной скоростью. Соответственно, можно выполнить управление торможением с более подходящими временными характеристиками, даже в том случае, когда электрический двигатель вращается в обратном направлении, путем установки времени до начала управления торможением для вращения в обратном направлении меньшим, чем время до начала управления торможением для вращения в прямом направлении.
Кроме того, электрифицированный инструмент по настоящему изобретению может включать в себя механизм передачи приводного усилия, который передает приводное усилие электрического двигателя на объект, который должен быть приведен в движение.
Согласно электрифицированному инструменту с указанной конфигурацией можно уменьшить вероятность воздействия на механизм передачи приводного усилия непредвиденно большой кинетической энергии. Таким образом, можно воспрепятствовать накоплению усталости в механизме передачи приводного усилия, что увеличит срок службы механизма передачи приводного усилия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - вид в перспективе, показывающий внешний вид электрифицированного инструмента по первому варианту;
фиг.2 - блок-схема, показывающая электрическую конфигурацию электрифицированного инструмента по первому варианту;
фиг.3 - блок-схема основной программы, выполняемой микрокомпьютером в первом варианте;
фиг.4 - блок-схема процесса приведения в движение электрического двигателя, выполняемого микрокомпьютером по первому варианту;
фиг.5 - блок-схема, показывающая шаги процесса приведения в движение электрического двигателя по второму вариант;
фиг.6А - блок-схема, показывающая часть шагов процесса приведения в движение электрического двигателя по третьему варианту;
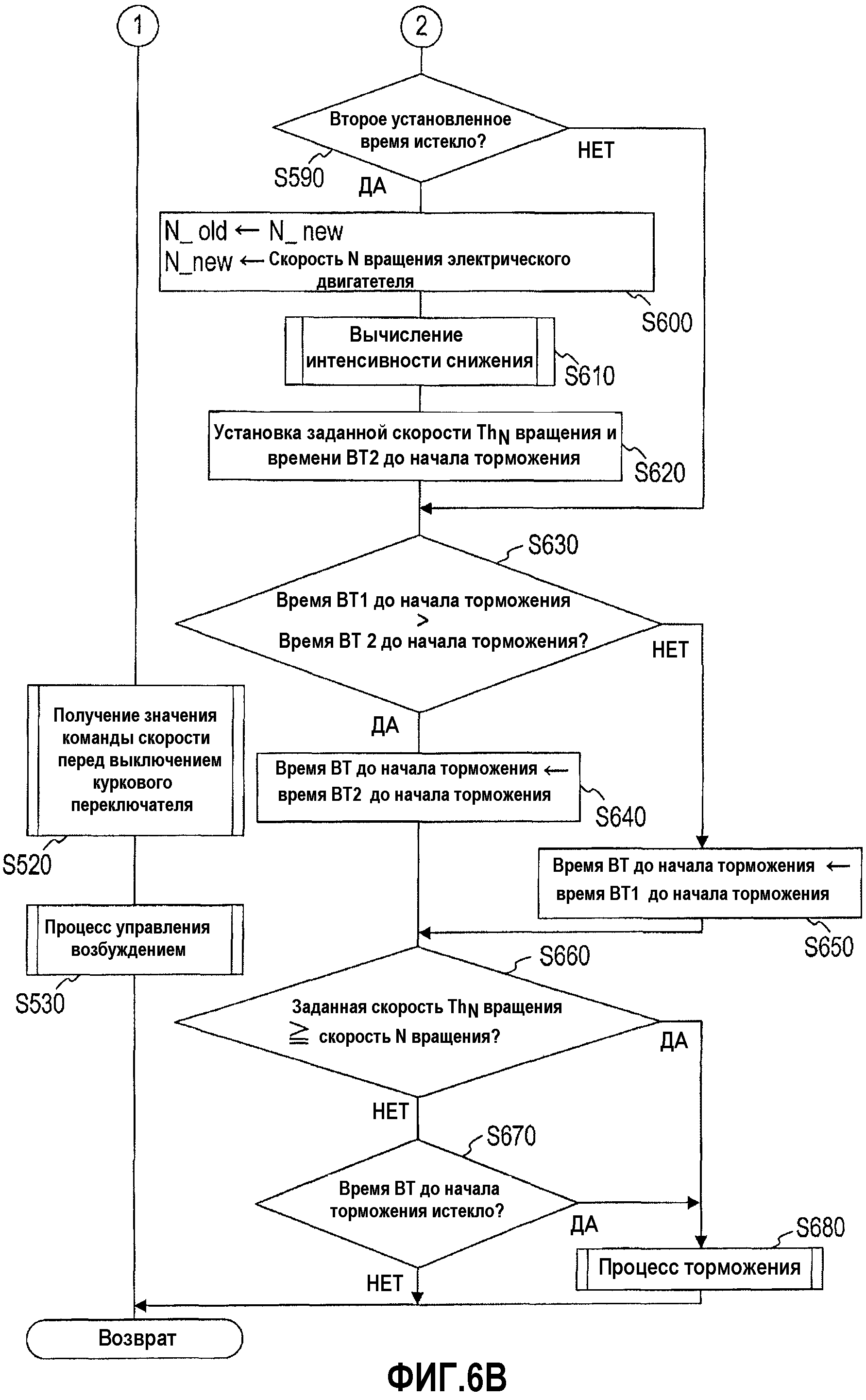
фиг.6В - блок-схема, показывающая остальные шаги процесса приведения в движение электрического двигателя по третьему варианту;
фиг.7 - блок-схема, показывающая электрическую конфигурацию электрифицированного инструмента по четвертому варианту;
фиг.8 - блок-схема, показывающая электрическую конфигурацию электрифицированного инструмента согласно модифицированному примеру.
ТЕХНИЧЕСКОЕ ВЫПОЛНЕНИЕ ИЗОБРЕТЕНИЯ
Далее со ссылками на чертежи описываются варианты настоящего изобретения.
Первый вариант
Общая конфигурация электрифицированного инструмента
Как показано на фиг.1, электрифицированный инструмент 1, который сконфигурирован в виде так называемого «кустореза» для срезания сорняков и небольших деревьев, включает в себя трубку 2 вала, моторный блок 3 и фрезу 4.
Трубка 2 вала сформирована в виде полого стержня. На одном конце трубки 2 вала предусмотрен моторный блок 3, в то время как на другом конце трубки 2 вала предусмотрена фреза 4, которую можно присоединять/отсоединять к/от трубки вала. Далее конец трубки 2 вала, на котором предусмотрен моторный блок 3, называется верхним концом, а конец, на котором предусмотрена фреза 4, называется нижним концом.
Фреза 4 в целом сформирована фактически в форме диска. В частности, центральная часть фрезы 4 выполнена из материала, жесткость которого превышает или равна заранее заданному значению (например, металл или сверхпрочная синтетическая смола), и сформована в виде диска или имеет столбчатую форму. На периферии фрезы 4 имеется множество режущих пластин (не показаны). Это множество пластин может представлять собой тонкие пластины, выполненные из того же материала, что и центральная часть фрезы 4 или из другого материала, либо они могут представлять собой нити синтетического корда (так называемый «нейлоновый корд»), сформированные из синтетической смолы в форме струны.
В средней части трубки 2 вала предусмотрена рукоятка 8. Рукоятка 8 включает в себя ручку 9 для правой руки, которую пользователь электрифицированного инструмента 1 держит правой рукой, и ручку 10 для левой руки, которую пользователь держит левой рукой. Ручка 9 для правой руки включает в себя переключатель 11 разблокирования, курковый переключатель 12 и реверсивный селекторный переключатель 13 (см. фиг.2).
Моторный блок 3 включает в себя батарею 7 и электрический двигатель 18.
Батарея 7 включает в себя перезаряжаемую вторичную батарею, такую как ионно-литиевая вторичная батарея. Конфигурация батареи 7 предусматривает возможность ее присоединения к моторному блоку 3 и ее отсоединения.
При подаче электрического тока от батареи 7 на обмотку электрического двигателя 18 ротор электрического двигателя 18, имеющий приводной вал, вращается.
В трубке 2 вала находится вал 21, передающий приводное усилие (далее просто называемый трансмиссионным валом). Трансмиссионный вал 21 соединен с приводным валом электрического двигателя 18 на верхнем конце трансмиссионного вала 21, и соединен с фрезой 4 на нижней конце трансмиссионного вала 21 через зубчатую передачу 6, включающую в себя множество шестерен.
При вышеописанной конфигурации вращательное приводное усилие электрического двигателя 18 передается на фрезу 4 через трансмиссионный вал 21 и зубчатую передачу 6.
Электрическая конфигурация электрифицированного инструмента
Как показано на фиг.2, электрифицированный инструмент 1 включает в себя вышеописанный электрический двигатель 18, мостовую схему 20, шесть ключевых схем 31-36 и схему 14 управления.
Электрический двигатель 18 сконфигурирован в виде широко известного трехфазного бесщеточного двигателя постоянного тока. Когда электрический ток последовательно подается в обмотки соответствующих фаз U, V и W, ротор электрического двигателя 18 начинает вращаться. Электрический двигатель 18 в первом варианте включает в себя блок 17 определения положения для определения угла поворота ротора. Блок 17 определения положения включает в себя хорошо известный элемент Холла.
Обмотки для соответствующих фаз U, V и W электрического двигателя подсоединены к батарее 7 через мостовую схему 20.
Мостовая схема 20 представляет собой хорошо известную трехфазную мостовую схему, включающую в себя шесть коммутационных устройств Q1-Q6. В мостовой схеме 20 пара последовательно соединенных коммутационных устройств Q1, Q4, пара последовательно соединенных коммутационных устройств Q2, Q5 и пара последовательно соединенных коммутационных устройств Q3, Q6 подсоединены параллельно между положительным электродом и отрицательным электродом батареи 7. Также обмотки для соответствующих фаз U, V и W электрического двигателя 18 подсоединены соответственно к точке между коммутационными устройствами Q1 и Q4, точке между коммутационными устройствами Q2 и Q5 и к точке между коммутационными устройствами Q3 и Q6.
В частности, мостовая схема 20 сконфигурирована таким образом, что она дает возможность приведения во вращение ротора электрического двигателя 18 в любом направлении: прямом или обратном, путем соответствующего управления включением/выключением коммутационных устройств Q1-Q6. Вращение в прямом направлении означает вращение фрезы 4 в направлении, обеспечивающем срезание сорняков и небольших деревьев. В противоположность этому, обратное направление вращения означает направление вращения, противоположное прямому направлению вращения, которое используют при удалении сорняков или т.п., запутавшихся во фрезе. В этой связи электрифицированный инструмент 1 по первому варианту сконфигурирован таким образом, что скорость вращения в обратном направлении ниже скорости вращения в прямом направлении.
Ключевые схемы 31-36 сконфигурированы для правильного включения/выключения соответствующих коммутационных устройств Q1-Q6 в мостовой схеме 20 в соответствии с сигналами возбуждения, вводимыми из схемы 14 управления в ключевые схемы 31-36 соответственно.
Схема 14 управления включает в себя широко известный микрокомпьютер 14А, снабженный центральным процессором (CPU), памятью, средствами ввода/вывода и т.д.
К схеме 14 управления подсоединена схема стабилизации напряжения (Reg) 15, причем схема 14 управления сконфигурирована так, что она приводится в действие при заранее определенном управляющем напряжении Vcc (например, 5В постоянного тока), создаваемом путем снижения напряжения постоянного тока (например, 36В постоянного тока) батареи 7 с помощью Reg 15.
К схеме 14 управления подсоединены переключатель 11 разблокирования, курковый переключатель 12 и реверсивный селекторный переключатель 13.
Переключатель 11 разблокирования представляет собой переключатель, предназначенный для предотвращения ошибочного приведения в движение электрического двигателя 18 пользователем электрифицированного инструмента 1. В частности, когда переключатель 11 разблокирования выключен, логический уровень напряжения сигнала (сигнал запрета приведения в движение), введенного в схему 14 управления от переключателя 11 разблокирования, устанавливается на низком уровне (то есть приведение в движение электрического двигателя 18 запрещено), в то время как, когда переключатель 11 разблокирования включен, логический уровень напряжения сигнала запрета приведения в движение устанавливается на высоком уровне (приведение в движение электрического двигателя 18 разрешено).
Реверсивный селекторный переключатель 13 представляет собой переключатель, с помощью которого пользователь электрифицированного инструмента 1 устанавливает одно из возможных направлений вращения ротора электрического двигателя 18: в прямом направлении или в обратном направлении. Когда реверсивный селекторный переключатель 13 выключен, логический уровень напряжения сигнала (сигнал вращения в прямом направлении), поступающего на вход схемы 14 управления от реверсивного селекторного переключателя 13, устанавливается на низком уровне, в то время как при включенном состоянии реверсивного селекторного переключателя 13 логический уровень напряжения сигнала вращения в прямом направлении устанавливается на высоком уровне.
Курковый переключатель 12, который содержит контактный переключатель 12А и переменный резистор 12В, сконфигурирован для выдачи в схему 14 управления сигнала (операционный сигнал), указывающего, был ли нажат курковый переключатель 12, а также сигнала (значение Cv команды скорости), напряжение которого зависит от величины рабочего хода (хода курка) куркового переключателя 12.
Также в памяти микрокомпьютера 14А хранятся программы для различных процессов, выполняемых микрокомпьютером 14А. В описываемом ниже процессе приведения в движение электрического двигателя управление ключевыми схемами 31-36 осуществляется так, что электрический ток, величина которого зависит от значения Cv команды скорости, подается через обмотки для соответствующих фаз U, V и W электрического двигателя 18, причем, когда удовлетворяется заранее определенное заданное условие, к ротору электрического двигателя 18 прикладывается тормозное усилие.
В памяти микрокомпьютера 14А также хранятся различные пороговые значения Th, необходимые для определения того, удовлетворяется ли заданное условие.
То есть схема 14 управления выдает сигнал возбуждения на каждую из ключевых схем 31-36, так что ротор электрического двигателя 18 вращается со скоростью, зависящей от значения Cv команды скорости, получаемой от куркового переключателя 12, когда оба переключателя: переключатель 11 разблокирования и курковый переключатель 12 включены.
Процесс в схеме управления
Далее описывается процесс, выполняемый схемой 14 управления (или более точно, микрокомпьютером 14А).
Основная программа, показанная на фиг.3, активируется в первом варианте при включении переключателя 11 разблокирования. Однако основная программа может активироваться при подсоединении батареи 7 к электрифицированному инструменту 1, или при нажатии куркового переключателя 12.
Как показано на фиг.3, в основной программе с многократным повторением выполняются процесс (S100) определения состояния куркового переключателя и процесс S102 приведения в движение электрического двигателя.
В процессе определения состояния куркового переключателя определяется значение Cv команды скорости, введенной от куркового переключателя 12. В частности, значение сопротивления переменного резистора 12В изменяется в зависимости от рабочего хода куркового переключателя 12, установленного пользователем, и в качестве значения Cv команды скорости определяется напряжение, зависящее от указанного значения сопротивления.
Затем, как показано на фиг.4, в процессе приведения в движение электрического двигателя определяется, меньше ли значение Cv команды скорости, определенное в процессе (S100) определения состояния куркового переключателя, заданного значения Thv, которое представляет собой заранее заданное пороговое значение (S110). Заданное значение Thv представляет собой точное значение Cv команды скорости, на основании которого можно считать, что курковый переключатель 12 выключен. Соответственно, когда значение Cv команды скорости находится в диапазоне от 0 [B] до значения, меньшего заданного значения Thv (пример диапазона остановки в настоящем изобретении), микрокомпьютер 14А определяет, что была выдана команда останова электрического двигателя 18, и прекращает вывод сигналов возбуждения на ключевые схемы 31-36.
Если на шаге S110 определено, что значение Cv команды скорости равно или превышает заданное значение Thv (S110: Нет), данный процесс продолжается на шаге S120. То есть данный процесс продолжается на шаге S120, если можно посчитать, что оба переключателя: переключатель 11 разблокирования и курковый переключатель 12 включены.
На шаге S120 выполняется ранее определенный процесс управления возбуждением. Процесс управления возбуждением является хорошо известным процессом вывода на ключевые схемы 31-36 сигналов возбуждения, которые инициируют протекание электрического тока, зависящего от значения Cv команды скорости, через обмотки для соответствующих фаз U, V и W электрического двигателя 18. При выполнении процесса управления возбуждением ротор электрического двигателя 18 вращается со скоростью (указываемой количеством оборотов в единицу времени (например, одна минута) в первом варианте) в соответствии с ходом курка, то есть, рабочим ходом куркового переключателя 12. После завершения операции на шаге S120 данный процесс приведения в движения электрического двигателя завершается.
Если на шаге S110 определено, что значение Cv команды скорости меньше заданного значения Thv, то есть курковый переключатель 12 выключен (S110: Да), данный процесс переходит к шагу S130. На шаге S130 прекращается вывод сигналов возбуждения. В результате ключевые схемы 31, 36 выключают все коммутационные устройства Q1-Q6, и отключается электрический ток в каждой из обмоток для соответствующих фаз U, V и W электрического двигателя 18. Соответственно, ротор электрического двигателя 18 продолжает вращаться за счет инерции после отключения электрического тока.
Затем на шаге S140 определяют, имеет ли сигнал вращения в прямом направлении от реверсивного селекторного переключателя 13 высокий уровень. Если определено, что сигнал вращения в прямом направлении имеет высокий уровень (S140: Да), то тогда определяют, что ротор электрического двигателя 18 вращается в прямом направлении, и данный процесс переходит к шагу S150.
На шаге S150 получают заданную скорость ThN, которая представляет собой заранее заданное пороговое значение. Заданную скорость ThN устанавливают в качестве скорости вращения, при которой следует начинать торможение ротора электрического двигателя 18. В первом варианте в качестве заданной скорости ThNвращения устанавливают скорость вращения, при которой следует начинать торможение ротора, когда к электрифицированному инструменту 1 присоединена фреза, имеющая максимальную инерционность среди множества типов фрез, присоединяемых к электрифицированному инструменту 1. Также в первом варианте в качестве заданной скорости ThNвращения устанавливают отдельное значение в случае, когда ротор электрического двигателя 18 вращается в прямом направлении, и отдельное значение в случае, когда ротор электрического двигателя 18 вращается в обратном направлении. Заданная скорость ThNвращения, соответствующая вращению в прямом направлении, может иметь такое же значение, как заданная скорость ThNвращения, соответствующая вращению в обратном направлении, либо может иметь другое значение, отличное от заданной скорости ThNвращения, соответствующей вращению в обратном направлении.
Если на шаге S140 определено, что сигнал вращения в прямом направлении, поступивший от реверсивного селекторного переключателя 13, имеет низкий уровень (S140: Нет), определяют, что ротор электрического двигателя 18 вращается в обратном направлении. Затем данный процесс переходит к шагу S160, на котором получают заданную скорость ThNвращения, соответствующую вращению в обратном направлении.
Далее на шаге S170 на основе выходного сигнала из блока 17 определения положения получают скорость N [об/мин] вращения ротора электрического двигателя 18 в данный момент времени.
Затем на шаге S180 определяют, меньше или равна скорость N вращения, полученная на шаге S170, заданной скорости ThN вращения, полученной либо на шаге S10, либо на шаге S160. Если определено, что скорость N вращения равна или меньше заданной скорости ThNвращения (S180: Да), настоящий процесс переходит к шагу S190.
На шаге S190 выполняется определенный ранее процесс торможения. Процесс торможения представляет собой процесс выдачи сигналов возбуждения в ключевые схемы 31-36, которые включают все коммутационные устройства в группе коммутационных устройств Q1-Q3, образующих мостовую схему 20, или в группе коммутационных устройств Q4-Q6, образующих мостовую схему 20. При выполнении процесса торможения обмотки для соответствующих фаз U, V и W электрического двигателя 18 замыкают накоротко. Тогда к ротору электрического двигателя 18, который вращается за счет инерции, прикладывается тормозное усилие в результате так называемого «рекуперативного торможения». После завершения обработки на шаге S190 выполнение данной подпрограммы заканчивается.
Если на шаге S180 определено, что скорость N вращения превышает заданную скорость ThN вращения, процесс приведения в движение электрического двигателя завершается без выполнения шага S190.
Положительные эффекты первого варианта
Как было описано выше, в процессе приведения в движение электрического двигателя по первому варианту процесс торможения выполняют тогда, когда скорость N вращения становится равной или меньшей, чем заданная скорость ThNвращения, после прекращения подачи электрического тока в обмотки для соответствующих фаз U, V и W электрического двигателя 18.
Короче говоря, в процессе приведения в движение электрического двигателя по первому варианту предусмотрено время ожидания, пока кинетическая энергия фрезы 4, вращающейся за счет инерции, уменьшится до величины, равной или меньшей заранее определенного значения, после чего выполняется процесс торможения.
В частности, в процессе приведения в движение электрического двигателя по первому варианту заданная скорость ThN вращения, сравниваемая со скоростью N вращения, имеет значение, соответствующее фрезе с максимальной инерционностью относительно приводного вала электрического двигателя 18 как центра вращения, среди различных типов фрез, присоединяемых к электрифицированному инструменту 1. Соответственно, независимо от фрезы, присоединенной к электрифицированному инструменту 1, процесс торможения может выполняться после того, как кинетическая энергия фрезы во время вращения станет равной или меньшей заранее определенного значения.
В результате, согласно электрифицированному инструменту 1 по первому варианту тормозное усилие прикладывается к ротору после снижения скорости N вращения, вследствие чего может быть уменьшена отдача от электрифицированного инструмента 1 из-за тормозного усилия. Таким образом, можно нивелировать ухудшение удобства использования электрифицированного инструмента 1, являющегося результатом торможения электрического двигателя 18.
Также согласно электрифицированному инструменту 1, можно подавить воздействие неожиданно большой кинетической энергии на трансмиссионный вал или шестерни в зубчатой передаче 6. Следовательно, можно воспрепятствовать накоплению усталости в трансмиссионном вале и шестернях, и тем самым продлить срок службы трансмиссионного вала и шестерен.
В первом варианте примером объекта, приводимого в движение в настоящем изобретении, является фреза 4, шаг S170 в процессе приведения в движение электрического двигателя является примером функционирования устройства определения скорости вращения в настоящем изобретении. Шаг S190 является примером функционирования тормозного устройства в настоящем варианте, а шаг S180 является примером функционирования устройства активирования на основе скорости вращения согласно настоящему изобретению.
Кроме того, в первом варианте шаги S150 и S160 являются примерами функционирования устройства задания заданной скорости в настоящем изобретении, курковый переключатель 12 является примером переключателя команды скорости вращения в настоящем изобретении, а шаг S100 в основной программе является примером функционирования устройства получения значения команды в настоящем изобретении.
Второй вариант
Далее описывается второй вариант настоящего изобретения.
Электрифицированный инструмент, описанный во втором варианте, отличается от электрифицированного инструмента 1, описанного в первом варианте, только процессом приведения в движения электрического двигателя, выполняемым схемой 14 управления.
Таким образом, во втором варианте будет в основном описан процесс приведения в движение электрического двигателя, который отличается от аналогичного процесса в электрифицированном инструменте 1 по первому варианту, в то время как составляющим, совпадающим с электрифицированным инструментом 1 по первому варианту, присвоены одинаковые ссылочные позиции, и их описание будет опущено.
Процесс приведения в движение электрического двигателя
Как показано на фиг.5, в процессе приведения в движение электрического двигателя по второму варианту сначала определяют, меньше ли значение Cv команды скорости, чем заданное значение Thv (S310). Если на шаге S310 определено, что значение Cv команды скорости больше или равно заданному значению Thv (S310: Нет), данный процесс переходит к шагу S320. В частности, если можно считать, что оба переключателя: переключатель 11 разблокирования и курковый переключатель 12 включены, то данный процесс переходит к шагу S320.
На шаге S320 выполняется процесс управления возбуждением. Процесс управления возбуждением по второму варианту аналогичен процессу возбуждения, описанному в первом варианте. После завершения процесса на шаге S320 настоящий процесс приведения в движение электрического двигателя заканчивается.
Если на шаге S310 определено, что значение Cv команды скорости меньше заданного значения Thv (S310: Да), то определяют, что курковый переключатель 12 был выключен, и данный процесс переходит к шагу S330. На шаге S330 прекращается вывод сигналов возбуждения. В частности, ключевые схемы 31-36 выключают все коммутационные устройства Q1-Q6, чтобы тем самым отключить электрический ток в обмотках для соответствующих фаз U, V и W электрического двигателя 18.
Далее на шаге S340 определяют, находится ли сигнал вращения в прямом направлении, поступивший от реверсивного селекторного переключателя 13, на высоком уровне. Если определено, что сигнал вращения в прямом направлении имеет высокий уровень (S340: Да), определяют, что ротор электрического двигателя 18 вращается в прямом направлении, и настоящий процесс переходит к шагу S350.
На шаге S350 получают время BT до начала торможения (как пример времени до начала управления торможением в настоящем изобретении), который представляет собой заранее заданный временной отрезок. Временной отрезок, заданный в качестве времени BT до начала торможения, представляет собой временной отрезок, необходимое с момента, когда курковый переключатель 12 выключен, до момента, когда кинетическая энергия фрезы 4 станет меньшей или равной заранее установленному значению. Упоминаемая здесь кинетическая энергия фрезы 4 базируется на предположении, что фреза 4 вращается с максимальной скоростью электрического двигателя 18. В качестве времени BT до начала торможения во втором варианте устанавливают временной отрезок с момента выключения куркового переключателя 12 до момента, когда кинетическая энергия фрезы, имеющей максимальную инерционность, среди множества типов фрез, присоединяемых к электрифицированному инструменту 1, становится меньшей или равной заранее установленному значению.
Во втором варианте время BT до начала торможения в случае, когда ротор электрического двигателя 18 вращается в прямом направлении, и время BT до начала торможения в случае, когда ротор вращается в обратном направлении, устанавливают по отдельности. Например, время BT до начала торможения при вращении в обратном направлении задают более коротким, чем время BT до начала торможения при вращении в прямом направлении.
На шаге S350 по второму варианту получают время BT до начала торможения при вращения в прямом направлении.
С другой стороны, когда на шаге S340 определяют, что сигнал вращения в прямом направлении, поступивший от реверсивного селекторного переключателя 13, имеет низкий уровень (S340: Нет), определяют, что ротор электрического двигателя 18 вращается в обратном направлении, и данный процесс продолжается на шаге S360, где получают время BT до начала торможения для направления вращения в обратном направлении.
Далее на шаге S370 определяют, больше ли истекшее время с момента выключения куркового переключателя 12, чем время BT до начала торможения. Если определено, что истекшее время больше времени BT до начала торможения (S370: Да), то настоящий процесс переходит к шагу S380. То есть, когда время BT до начала торможения истекло с момента выключения куркового переключателя 12, настоящий процесс переходит к шагу S380.
На шаге S380 выполняется ранее определенный процесс торможения. Процесс торможения, выполняемый во втором варианте, аналогичен процессу торможения, описанному в первом варианте. После завершения процесса на шаге S380, настоящий процесс приведения в движение электрического двигателя заканчивается.
Если на шаге S370 определено, что время BT до начала торможения не истекло, считая с момента выключения куркового переключателя 12 (S370: Нет), то процесс приведения в движение электрического двигателя немедленно завершается без выполнения процесса торможения на шаге S380.
Положительные эффекты второго варианта
В процессе приведения в движение электрического двигателя по второму варианту, как было описано выше, процесс торможения выполняется тогда, когда истекло время BT до начала торможения, начиная с момента выключения куркового переключателя 12.
В частности, время BT до начала торможения во втором варианте устанавливают в виде временного отрезка, необходимого до момента, когда кинетическая энергия фрезы 4 в процессе вращения станет меньше или равной заранее установленному значению.
Соответственно, в процессе приведения в движение электрического двигателя по второму варианту также предусмотрено время ожидания, пока кинетическая энергия фрезы 4, вращающейся за счет инерции, уменьшится до величины, равной или меньшей заранее определенного значения, после чего выполняется процесс торможения таким же образом, как в процессе приведения в движение электрического двигателя, описанном в первом варианте.
В результате в электрифицированном инструменте по второму варианту могут быть достигнуты такие же положительные эффекты, как в электрифицированном инструменте 1 по первому варианту.
Электрифицированный инструмент по второму варианту сконфигурирован так, что скорость вращения в обратном направлении ниже, чем скорость вращения в прямом направлении. В результате, даже в том случае, если ротор вращается в обратном направлении с максимальной скоростью, кинетическая энергия фрезы будет меньше, чем в случае, когда ротор вращается в прямом направлении с максимальной скоростью. Также во втором варианте время BT до начала торможения для вращения в обратном направлении задается более коротким, чем время BT до начала торможения для вращения в прямом направлении.
Таким образом, согласно электрифицированному инструменту по второму варианту процесс торможения может быть выполнен с правильными временными характеристиками даже в том случае, когда ротор вращается в обратном направлении.
Кроме того, время BT до начала торможения для случая вращения в обратном направлении может совпадать или отличаться от времени BT до начала торможения для вращения в прямом направлении.
Во втором варианте шаг S370 в процессе приведения в движение электрического двигателя является примером функционирования активирующего устройства на основе времени в настоящем изобретении, а шаг S350 и шаг S360 являются примером функционирования устройства установки времени в настоящем изобретении.
Третий вариант
Далее описывается третий вариант настоящего изобретения.
Электрифицированный инструмент по третьему варианту отличается от электрифицированного инструмента 1, описанного в первом и втором вариантах только процессом приведения в движение электрического двигателя, выполняемым схемой 14 управления.
Таким образом, в третьем варианте в основном будет описан процесс приведения в движение электрического двигателя, который отличается от аналогичного процесса в электрифицированном инструменте 1, описанном в первом и втором вариантах, причем аналогичным составляющим в электрифицированном инструменте 1, описанном в первом и втором вариантах, присвоены соответственно одинаковые ссылочные позиции, и далее они не описываются.
Процесс приведения в движение электрического двигателя
Как показано на фиг.6А-6В в процессе приведения в движение электрического двигателя по третьему варианту сначала определяют, меньше ли значение Cv команды скорости, чем заданное значение Thv (S510). Если на шаге S510 определено, что значение Cv команды скорости больше или равно заданному значению Thv (S510: Нет), то настоящий процесс переходит к шагу S520. В частности, если можно считать, что оба переключателя: переключатель 11 разблокирования и курковый переключатель 12 включены, то настоящий процесс переходит к шагу S520.
На шаге S520 получают значение Cv команды скорости, перед тем как значение Cv команды скорости становится меньше заданного значения Thv, то есть перед выключением куркового переключателя 12, чтобы использовать это значение на шаге S570, описанном ниже.
Далее на шаге S530 выполняется процесс управления возбуждением. Процесс управления возбуждением по третьему варианту аналогичен процессу управления возбуждением по первому и второму вариантам. После завершения процесса на шаге S530 настоящий процесс приведения в движение электрического двигателя прекращается.
Если на шаге S510 определено, что значение Cv команды скорости меньше заданного значения Thv (S510: Да), определяют, что курковый переключатель 12 выключен, и настоящий процесс переходит к шагу S540. На шаге S540 прекращается вывод сигналов возбуждения. В частности, ключевые схемы 31-36 выключают все коммутационные устройства Q1-Q6, чтобы тем самым отключить электрический ток в обмотках для соответствующих фаз U, V и W электрического двигателя 18.
Затем на шаге S550 получают скорость N вращения в текущий момент времени ротора электрического двигателя 18 на основе выходного сигнала блока 17 определения положения.
Далее на шаге S560 определяют, истекло ли первое установленное время, которое представляет собой заранее заданный временной отрезок (например, несколько десятков [мс]), с момента первого определения на шаге S510 того, что значение Cv команды скорости меньше заданного значения Thv. Если на шаге S560 определено, что указанное первое установленное время не истекло (S560: Нет), то настоящий процесс переходит к шагу S570. То есть условие для перехода к шагу S570 состоит в том, что этот переход осуществляется немедленно после выключения куркового переключателя 12.
На шаге S570 устанавливают время BT1 до начала торможения на основе значения Cv команды скорости непосредственно перед выключением куркового переключателя 12 (далее это называется «значение Cvf команды в момент отключения»), которое было получено на шаге S520.
Время BT1 до начала торможения - это временной отрезок, необходимый с момента выключения куркового переключателя 12 до момента, когда кинетическая энергия фрезы 4 в процессе вращения становится меньшей или равной заранее установленному значению. На шаге S570, чем больше значение Cvf команды в момент отключения, тем более длинный временной отрезок должен быть установлен. Значение Cvf команды в момент отключения - это значение Cv команды скорости в заранее заданное время (например, за несколько [мс]) до момента времени, когда первый раз на шаге S510 определено, что значение Cv команды скорости меньше заданного значения Thv.
В частности, на шаге S570, чем выше скорость вращения ротора сразу после выключения куркового переключателя 12, тем больше кинетическая энергия фрезы 4 во время вращения, а значит, в качестве времени BT1 до начала торможения устанавливают более длинный временной отрезок.
Далее на шаге S580 скорость N вращения двигателя 12 устанавливают равной первой скорости N_new вращения, и настоящий процесс переходит к шагу S590.
Если на шаге S560 определено, что первое установленное время истекло, поскольку на шаге S510 определено, что значение Cv команды скорости меньше заданного значения Thv, настоящий процесс также переходит к шагу S590.
Затем на шаге S590 определяют, истекло ли второе установленное время, которое является заранее заданным временным отрезком (например, несколько десятков [мс]), с тех пор, как настоящий процесс перешел к шагу S600 последний раз. Если определено, что второе установленное время истекло (S590: Да), настоящий процесс переходит к шагу S600.
На шаге S600 скорость N вращения, которая была установлена равной первой скорости N_new вращения с момента последнего выполнения шага S600 до момента перехода настоящего процесса к шагу S600 в данный момент времени, рассматривается как вторая скорость N_old вращения. Также на шаге S600 скорость N вращения, полученную на шаге S550, устанавливают равной первой скорости N_new вращения. То есть, как только настоящий процесс переходит к шагу S600, полученная ранее скорость N вращения рассматривается как вторая скорость N-old вращения, в то время как полученная позже скорость N вращения рассматривается как первая скорость N_new вращения, когда указанное время прошло.
При выполнении шага S600 первый раз значение первой скорости N_new вращения, установленное на шаге S580, равно начальному значению первой скорости N_new вращения.
Далее на шаге S610 вычисляют интенсивность снижения скорости, с которой уменьшаются скорость вращения со второй скорости N_old вращения до первой скорости N_new вращения в течение заранее определенного единичного периода времени.
На шаге S620 в качестве заданной скорости ThNвращения и времени BT2 до начала торможения соответственно устанавливают заданную скорость вращения и время до начала торможения, которые соответствуют интенсивности снижения скорости, вычисленной на шаге S610.
Заданной скоростью вращения, соответствующей интенсивности снижения скорости, является скорость вращения ротора, связанная с данной интенсивностью снижения скорости. Следует заметить, что скорость вращения, соответствующая интенсивности снижения скорости, которая представляет собой скорость вращения, при которой кинетическая энергия фрезы 4 в процессе вращения равна или меньше заранее установленного значения, будет тем больше, чем больше интенсивность снижения скорости.
По этой причине кинетическая энергия фрезы 4 в процессе вращения имеет слабую тенденцию к уменьшению, а время, необходимое для того, чтобы кинетическая энергия стала равна или меньше заранее установленного значения, будет тем больше, чем меньше интенсивность снижения скорости.
Время до начала торможения, которое соответствует интенсивности снижения, представляет собой временной отрезок, зависящий от интенсивности снижения скорости. Следует заметить, что отрезок времени, зависящий от интенсивности снижения скорости, который представляет собой отрезок времени, необходимый с момента выключения куркового переключателя 12 до момента, когда кинетическая энергия фрезы 4 в процессе вращения станет равной или меньшей заранее установленной величины, будет тем короче, чем больше интенсивность снижения.
После установки на шаге S620 заданной скорости ThN вращения и времени BT2 до начала торможения, как было описано выше, настоящий процесс переходит к шагу S630.
На шаге S630 определяют, меньше ли время BT2 до начала торможения, установленное на шаге S620, времени BT1 до начала торможения, установленного на шаге S570. Если на шаге S630 определено, что время BT2 до начала торможения меньше времени BT1 до начала торможения (S630: Да), настоящий процесс переходит к шагу S640. Если на шаге S630 определено, что время BT2 до начала торможения равно или превышает время BT1 до начала торможения (S630: Нет), настоящий процесс переходит к шагу S650. Если настоящий процесс переходит к шагу S630 без выполнения обработки на шаге S620, то в качестве времени BT2 до начала торможения никакое подходящее значение не устанавливается. Следовательно, на шаге S630 определяют, что время BT2 до начала торможения равно или превышает время BT1 до начала торможения.
На шаге S640 в качестве времени BT до начала торможения устанавливают время BT2 до начала торможения, которое подлежит использованию в операции определения на шаге S670, как описано ниже. Затем настоящий процесс переходит к шагу S660. С другой стороны, на шаге S650 в качестве времени BT до начала торможения устанавливают время BT1 до начала торможения, которое используют в операции определения на шаге S670. Затем настоящий процесс переходит к шагу S660.
Если на шаге S590 определено, что второе установленное время не истекло с момента последнего перехода настоящего процесса к шагу S600, настоящий процесс переходит к шагу S630 без выполнения операций на шагах с S600 по S620.
На шаге S660 определяют, равна ли или меньше скорость N вращения, полученная на шаге S550, чем заданная скорость ThNвращения, установленная на шаге S620. Если определено, что скорость N вращения превышает заданную скорость ThN вращения (S660: Нет), то настоящий процесс переходит к шагу S670. Если настоящий процесс переходит к шагу S660 без выполнения обработки на шаге S620, то на шаге S660 определяют, что скорость N вращения превышает заданную скорость ThNвращения.
Далее на шаге S670 определяют, превышает ли истекшее время с момента выключения куркового переключателя 12 время BT до начала торможения, установленное на шаге S640 или S650. Если определено, что это истекшее время превышает время BT до начала торможения (S670: Да), то настоящий процесс переходит к шагу S680. То есть настоящий процесс переходит к шагу S680, когда истекло время BT до начала торможения с момента выключения куркового переключателя 12. Также, если на шаге S660 определено, что скорость N вращения равна или меньше заданной скорости ThNвращения (S660: Да), то настоящий процесс переходит к шагу S680.
На шаге S680 выполняется процесс торможения. Процесс торможения, выполняемый в третьем варианте, аналогичен процессу торможения, описанному в первом и втором вариантах. После завершения обработки на шаге S680 настоящий процесс приведения в движение электрического двигателя заканчивается.
Когда на шаге S670 определено, что время BT до начала торможения еще не истекло с момента выключения куркового переключателя 12 (S670: Нет), настоящий процесс приведения в движение электрического двигателя завершается без выполнения на шаге S680 процесса торможения.
Положительные эффекты третьего варианта
Как было описано выше, в процессе приведения в движение электрического двигателя по третьему варианту процесс торможения выполняется тогда, когда истекло время BT до начала торможения с момента выключения куркового переключателя 12, или когда скорость N вращения станет равной или меньшей, чем заданная скорость ThNвращения.
Другими словами, в процессе приведения в движение электрического двигателя по третьему варианту процесс торможения выполняется после ожидания снижения кинетической энергии фрезы 4, вращающейся за счет инерции, до величины, равной или меньшей установленного значения.
Кроме того, согласно электрифицированному инструменту по третьему варианту также можно нивелировать неожиданно большое воздействие кинетической энергии (механическое воздействие) на трансмиссионный вал или шестерни в зубчатой передаче 6 таким же образом, как в электрифицированном инструменте по первому варианту или второму варианту.
Кроме того, согласно электрифицированному инструменту по третьему варианту, интенсивность снижения скорости, используемую для установки времени BT до начала торможения, и заданную скорость ThNвращения вычисляют каждый раз, когда истекает второе установленное время с момента выключения куркового переключателя 12.
Следовательно, согласно электрифицированному инструменту по третьему варианту процесс торможения может выполняться с правильными временными характеристиками в зависимости от нагрузки.
В частности, в процессе приведения в движение электрического двигателя по третьему варианту установка времени BT до начала торможения выполняется сразу после выключения куркового переключателя 12. Таким образом, согласно электрифицированному инструменту по третьему варианту можно задавать время BT до начала торможения в зависимости от режима использования электрифицированного инструмента при выполнении попытки прекращения вращения ротора электрического двигателя 18.
В третьем варианте шаг S610 в процессе приведения в движение электрического двигателя является примером функционирования устройства вычисления интенсивности снижения скорости в настоящем изобретении, шаг S620 представляет собой пример функционирования устройства установки заданной скорости и устройства установки времени в настоящем изобретении, а шаг S570 представляет пример функционирования устройства оценки в настоящем изобретении.
Четвертый вариант
Далее описывается четвертый вариант настоящего изобретения.
Электрифицированный инструмент по четвертому варианту имеет другой электрический двигатель и другую электрическую конфигурацию для приведения в движение электрического двигателя по сравнению с электрифицированным инструментом 1, описанным в вариантах с первого по третий.
Таким образом, в четвертом варианте в основном описывается электрический двигатель и электрическая конфигурация для приведения в движение электрического двигателя, отличные от тех, которые использовались в электрифицированном устройстве 1 по вариантам с первого по третий, причем конфигурациям и процессам, которые совпадают с аналогичными конфигурациям и процессами в электрифицированном инструменте 1 в вариантах с первого по третий, присвоены одинаковые ссылочные позиции, и их описание опущено.
Электрическая конфигурация электрифицированного инструмента
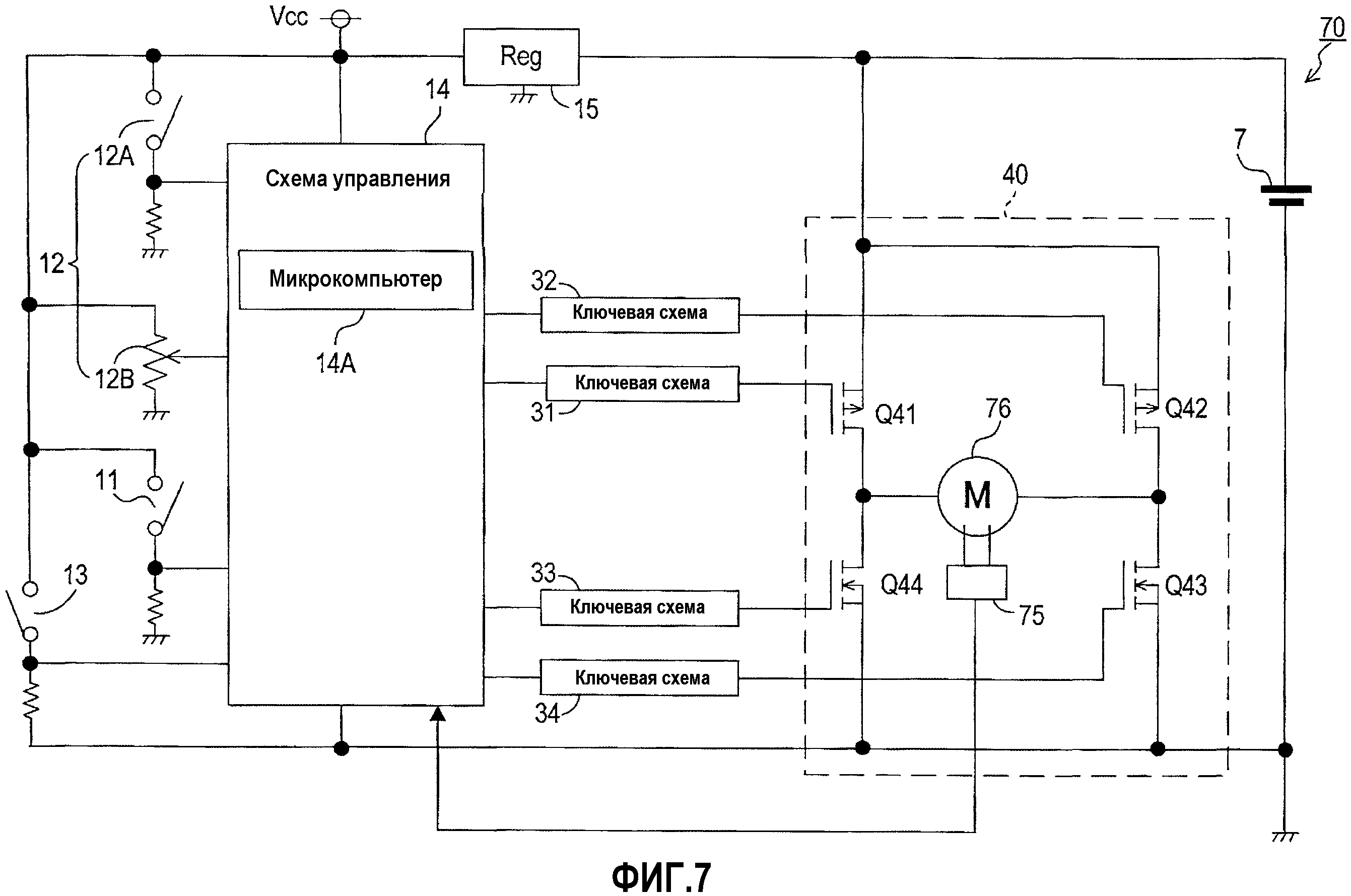
На фиг.7 представлена блок-схема, раскрывающая электрическую конфигурацию электрифицированного инструмента по четвертому варианту. В примере, показанном на фиг.7, электрифицированный инструмент 70 по четвертому варианту включает в себя электрический двигатель 76, сконфигурированный в виде щеточного двигателя постоянного тока.
На приводном валу электрического двигателя 76 обеспечен блок 75 определения положения для определения угла поворота приводного вала. Блок 75 определения положения включает в себя хорошо известный кодер (так называемый «преобразователь углового положения в код»), который выводит сигнал определения угла поворота из указанного преобразователя в схему 14 управления.
Электрический двигатель 76 подсоединен к батарее 7 через мостовую схему 40. Мостовая схема 40 представляет собой широко известную схему H-моста, образованную четырьмя коммутационными устройствами Q41-Q44.
Ротор электрического двигателя 76 вращается в прямом направлении, когда включены коммутационное устройство Q41 и коммутационное устройство Q43, и вращается в обратном направлении, когда включены коммутационное устройство Q42 и коммутационное устройство Q44.
Процесс торможения
В процессе торможения по четвертому варианту сигналы возбуждения выдаются в ключевые схемы 31-34, с тем, чтобы включалась только одна группа коммутационных устройств Q41 и Q42, которые выполняют функцию переключателей верхнего плеча, и группу коммутационных устройств Q43 и Q44, которые выполняют функцию переключателей нижнего плеча. Благодаря такому процессу торможения происходит короткое замыкание между обоими концами обмотки электрического двигателя 76. В результате осуществляется так называемое «рекуперативное торможение», и к ротору электрического двигателя 76 прикладывается тормозное усилие во время его вращения за счет инерции.
Положительные эффекты четвертого варианта
Как было описано выше, в электрифицированном инструменте 70 по четвертому варианту в качестве источника энергии для вращения фрезы 4 используется щеточный двигатель постоянного тока, а в качестве схемы возбуждения для приведения в движение щеточного двигателя постоянного тока используется схема H-моста.
Также в том случае, когда электрифицированный инструмент 70 сконфигурирован так, как было описано выше, можно приложить тормозное усилие к ротору электрического двигателя 76 после снижения кинетической энергии вращающейся фрезы 4 до значения, равного или меньшего установленного значения, таким же образом, как в электрифицированном инструменте 1, описанном в вариантах с первого по третий.
Другие варианты
Хотя выше был описан ряд вариантов настоящего изобретения, настоящее изобретение на должно сводиться к вариантам с первого по четвертый, а оно может быть реализовано в различных формах в рамках объема, не выходящего за рамки существа настоящего изобретения.
Например, хотя установка заданной скорости ThN вращения и времени BT до начала торможения выполняется независимо от направления вращения ротора электрического двигателя 18 в процессе приведения в движение электрического двигателя по третьему варианту, установка заданной скорости ThN вращения и времени BT до начала торможения может выполняться в зависимости от направления вращения ротора электрического двигателя 18 также как в процессе приведения в движение электрического двигателя по третьему варианту. То есть могут выполняться шаги процесса, соответствующие шагам S140-S160 в первом варианте, или шаги процесса, соответствующие шагам S340-S360 во втором варианте.
В качестве альтернативы, в то время как заданную скорость ThN вращения и время BT до начала торможения устанавливают в зависимости от направления вращения ротора электрического двигателя 18 в процессе приведения в движение электрического двигателя по первому и второму вариантам, заданную скорость ThN вращения и время BT до начала торможения не обязательно изменять в зависимости от направления вращения ротора в процессе приведения в движение электрического двигателя по первому и второму вариантам. То есть шаги S140-S160 в первом варианте и шаги S340-S360 во втором варианте могут быть опущены.
В этом случае электрический двигатель 76 может быть использован в качестве источника энергии для вращения фрезы 4, а в качестве схемы возбуждения для приведения в движение электрического двигателя 76 в электрифицированном инструменте 1 можно использовать схему возбуждения, показанную на фиг.8.
Схема возбуждения, показанная на фиг.8, включает в себя два коммутационных устройства Q51 и Q52. Коммутационное устройство Q52 включено последовательно в электрическую цепь, идущую от батареи 7 к электрическому двигателю 76, в то время как коммутационное устройство Q51 подключено параллельно электрическому двигателю 76. В коммутационном устройстве Q51 сток коммутационного устройства Q51 соединен с положительным электродом батареи 7, в то время как исток коммутационного устройства Q51 подсоединен между стоком коммутационного устройства Q52 и выводом электрического двигателя 76.
То есть при выключении коммутационного устройства Q51 и включении коммутационного устройства Q52 электрический ток подается в обмотку электрического двигателя 76, обеспечивая вращение ротора электрического двигателя 76.
Однако в то время, когда коммутационное устройство Q52 выключается, а коммутационное устройство Q51 только включается, подача тока от батареи 7 в обмотку электрического двигателя 76 отсутствует, и оба конца обмотки замкнуты накоротко. В результате осуществляется так называемое «рекуперативное торможение», и к ротору электрического двигателя 76 во время его вращения за счет инерции прикладывается тормозное усилие.
В вариантах с первого по четвертый время активирования процесса приведения в движение электрического двигателя может, например, представлять собой время, когда активирована схема 14 управления, то есть время, когда электрическая энергия подается в различные компоненты электрифицированного инструмента 1.
Кроме того, хотя настоящее изобретение применено к электрифицированному инструменту, сконфигурированному в виде кустореза в вариантах с первого по четвертый, настоящее изобретение можно использовать для электрифицированного инструмента в другом виде, например, для шлифовальной машины.
ПОЯСНЕНИЕ К ССЫЛОЧНЫМ ПОЗИЦИЯМ
1, 70 - электрифицированный инструмент; 2 - трубка вала; 3 - моторный блок; 4 - фреза; 6 - зубчатая передача; 7 - батарея; 8 - рукоятка; 9 - ручка для правой руки; 10 - ручка для левой руки; 11 - переключатель разблокирования; 12 - курковый переключатель; 13 - реверсивный селекторный переключатель; 14 - схема управления; 14А - микрокомпьютер; 17, 75 - блок определения положения; 18, 76 - электрический двигатель; 20, 40 - мостовая схема; 31-36 - ключевая схема; 77 - батарея; Q1-Q6, Q41-Q44, Q51, Q52 - коммутационное устройство.
Реферат
Изобретение относится к ручным приводным инструментам. Электрифицированный инструмент включает электрический двигатель, устройство определения скорости вращения электрического двигателя, тормозное устройство для торможения электрического двигателя и активирующее устройство для торможения электрического двигателя. Активирующее устройство выполнено с возможностью активирования тормозного устройства, когда скорость вращения, определенная устройством определения скорости вращения, становится равной или меньшей заданной скорости вращения, которую устанавливают после выдачи команды останова на отключение источника электрического тока от электрического двигателя. Технический результат заключается в повышении удобства использования при эксплуатации ручного инструмента за счет оптимизации операции торможения электрического двигателя. 15 з.п. ф-лы, 8 ил.
Комментарии