Электрический инструмент, а также блок управления и способ управления электродвигателем с двунаправленным вращением для него - RU2780033C1
Код документа: RU2780033C1
Чертежи
Описание
Область техники
Настоящая заявка относится к электрическому инструменту, содержащему электродвигатель с двунаправленным вращением, и, в частности, также относится к блоку управления и способу управления для управления операцией изменения направления вращения электродвигателя с двунаправленным вращением электрического инструмента на обратное.
Предпосылки изобретения
Многие ручные электрические инструменты, такие как сабельные пилы, перфораторы и электрические отбойные молотки, используют электродвигатель для приведения резцовой головки электрического инструмента для выполнения ожидаемого действия; электродвигатели этих инструментов обычно производят однонаправленное вращательное движение. Между электродвигателем и резцовой головкой расположен механизм передачи движения; зубчатые механизмы передачи широко используются для этой цели благодаря наличию таких преимуществ как компактная конструкция, высокая точность передачи, широкий диапазон применений и большое передаточное число. В вариантах применения, где зубчатый механизм передачи используется в качестве средства передачи, на зубцах сцепленных зубчатых колес обычно образован упрочненный слой для того, чтобы выдерживать износ при сцеплении и увеличивать срок службы зубчатых колес.
Несмотря на это, по мере использования электрического инструмента, после длительного периода сцепления зубчатых колес упрочненный слой на поверхности зубцов также будет постепенно изнашиваться и даже может отделиться; это значительно ускорит износ зубчатого колеса и, таким образом, сократит срок службы электрического инструмента. В таких условиях эту проблему можно до некоторой степени облегчить путем использования электродвигателя, способного обеспечивать двунаправленное вращение, так что износ зубцов распределяется между двумя противоположными сторонами зубцов.
Тем не менее, из-за того, что технология для управления направлением вращения электродвигателя является ограниченной, зубцы не изнашиваются равномерно на двух противоположных сторонах зубцов, что приводит к неудовлетворительному результату. В настоящее время управление изменением направления вращения электродвигателя на обратное либо выполняется вручную, либо выполняется автоматически в соответствии с определенным временным интервалом или определенным суммарным энергопотреблением электродвигателя, но ни один из этих способов не учитывает фактические эксплуатационные факторы, такие как производительность или нагрузка конкретного электрического инструмента. Например, в случае таких электрических инструментов как электрические дрели и сабельные пилы, действия, выполняемые резцовой головкой, включают эффективный рабочий ход или ход обработки резцом, выполняющий эффективную обработку, и холостой ход или ход возврата резца, не выполняющий эффективную обработку, при этом два хода не являются полностью одинаковыми по нагрузке, энергопотреблению, длительности и износу зубцов; вышеупомянутый образ управления, очевидно, не учитывает эти факторы, в результате чего износ остается неравномерным на двух противоположных сторонах зубцов.
Ожидается, что будет найдено решение вышеописанной технической проблемы.
Сущность изобретения
Цель настоящей заявки заключается в оптимизации управления изменением направления вращения, производимого электродвигателем с двунаправленным вращением электрического инструмента, на обратное, и предоставление блока управления и способа управления для достижения этого оптимизированного управления.
С этой целью в настоящей заявке предоставлен блок управления для определения направления вращательного движения, производимого электродвигателем электрического инструмента, причем электродвигатель представляет собой электродвигатель с двунаправленным вращением, и исполнительное устройство электрического инструмента, поочередно выполняющее эффективный рабочий ход и холостой ход в рабочем процессе, блок управления, содержащий датчик тока для измерения тока электродвигателя в режиме реального времени и контроллер, который находится в коммуникационном соединении с датчиком тока и электродвигателем, причем контроллер выполнен с возможностью:
определения, отвечает ли параметр определения соответствующему условию обратного хода, когда электрический инструмент начинает новый рабочий процесс; и
если определено, что параметр определения отвечает соответствующему условию обратного хода, подачи электродвигателю команды на запуск, так что направление вращательного движения, производимого им, изменяется на обратное относительно направления вращательного движения, производимого электродвигателем в предыдущем рабочем процессе электрического инструмента; в ином случае, если определено, что параметр определения не отвечает соответствующему условию обратного хода, подачи электродвигателю команды на запуск, так что направление вращательного движения, производимого им, идентично направлению вращательного движения, производимого электродвигателем в предыдущем рабочем процессе электрического инструмента,
при этом параметр определения и соответствующее условие обратного хода относятся к эффективному рабочему ходу, выполняемому электрическим инструментом с предыдущего изменения вращательного движения, производимого электродвигателем, на обратное. Настоящая заявка обладает следующими преимуществами: этот способ определения по существу относится только к эффективному рабочему ходу электрического инструмента и не относится к холостому ходу, выполняемому электрическим инструментом; такой способ определения является более точным и более специализированным, так что износ компонентов передачи в электрическом инструменте, особенно зубчатых колес, является более сбалансированным.
В частности, параметр определения и соответствующее условие обратного хода могут быть основаны на измеренном токе электродвигателя и конкретном токе, который относится к эффективному рабочему ходу.
Параметр определения может представлять собой суммарное время, в течение которого измеренный ток электродвигателя превысил конкретный ток, с предыдущего изменения вращательного движения, производимого электродвигателем, на обратное, и/или количество раз, когда измеренный ток электродвигателя совершил эффективный цикл тока, с предыдущего изменения вращательного движения, производимого электродвигателем, на обратное; соответственно, условием обратного хода может быть то, что суммарное время достигло или превысило конкретную критическую продолжительность работы электрического инструмента, и/или что количество раз равно или превышает конкретное количество циклов тока электрического инструмента.
В настоящей заявке дополнительно предоставлен электрический инструмент, содержащий: электродвигатель; механизм передачи, который сцеплен с выходным валом электродвигателя и приводится им в движение; исполнительное устройство, приводимое посредством механизма передачи; и блок управления, как описано выше. Исполнительное устройство может выполнять возвратно-поступательное линейное движение или возвратно-поступательное поворотное движение или производить однонаправленное вращательное движение.
Настоящая заявка является особенно преимущественной в случае, когда механизм передачи является зубчатым механизмом передачи. Настоящее изобретение точно определяет и управляет изменением вращения электродвигателя на обратное, на основании эффективного рабочего хода, который фактически выдерживает нагрузку, связанную с обработкой детали, так что износ двух сцепленных поверхностей каждого зубца зубчатого механизма передачи становится максимально сбалансированным, тем самым максимально увеличивая срок службы зубчатых колес и, таким образом, всего электрического инструмента.
В настоящей заявке дополнительно предоставлен способ использования вышеописанного блока управления для определения направления вращательного движения, производимого электродвигателем электрического инструмента, при этом способ включает следующие этапы, когда электрический инструмент начинает новый рабочий процесс: этап определения, отвечает ли параметр определения соответствующему условию обратного хода; этап запуска электродвигателя, при этом, когда в результате определения определяют, что параметр определения отвечает соответствующему условию обратного хода, направление вращательного движения, производимого электродвигателем, изменяют на обратное относительно направления вращательного движения, производимого электродвигателем в предыдущем рабочем процессе электрического инструмента; в ином случае, если в результате определения определяют, что параметр определения не отвечает соответствующему условию обратного хода, направление вращательного движения, производимого электродвигателем, оставляют таким же, что и направление вращательного движения, производимого электродвигателем в предыдущем рабочем процессе электрического инструмента, при этом параметр определения и соответствующее условие обратного хода относятся к эффективному рабочему ходу, выполняемому электрическим инструментом с предыдущего изменения вращательного движения, производимого электродвигателем, на обратное, и не относится к холостому ходу, выполняемому электрическим инструментом.
Согласно настоящей заявке, в каждом случае, когда электрический инструмент выполнил эффективный рабочий ход или эффективный цикл тока определенное количество раз, вращательное движение, производимое электродвигателем, будет меняться на обратное в следующем рабочем процессе электрического инструмента; этот способ управления обратным ходом исключает холостой ход, выполняемый электрическим инструментом, так что управление становится более точным, износ электрического инструмента сведен к минимуму и срок службы максимально увеличивается. Это особенно верно для электрических инструментов, содержащих зубчатый механизм передачи; изменение вращения электродвигателя на обратное точно управляется согласно количеству раз, когда электрический инструмент или его зубчатый механизм передачи выдерживает эффективную нагрузку, или согласно длительности этой нагрузки, так что степень износа двух сцепленных поверхностей каждого зубца зубчатого колеса является сопоставимой и сбалансированной в максимальной степени, тем самым увеличивая срок службы зубчатого механизма передачи и всего электрического инструмента.
Краткое описание графических материалов
Вышеупомянутые и другие признаки и преимущества настоящей заявки будут более понятны специалистам в данной области после ознакомления с вариантами осуществления, описанными ниже в сочетании с графическими материалами, на которых:
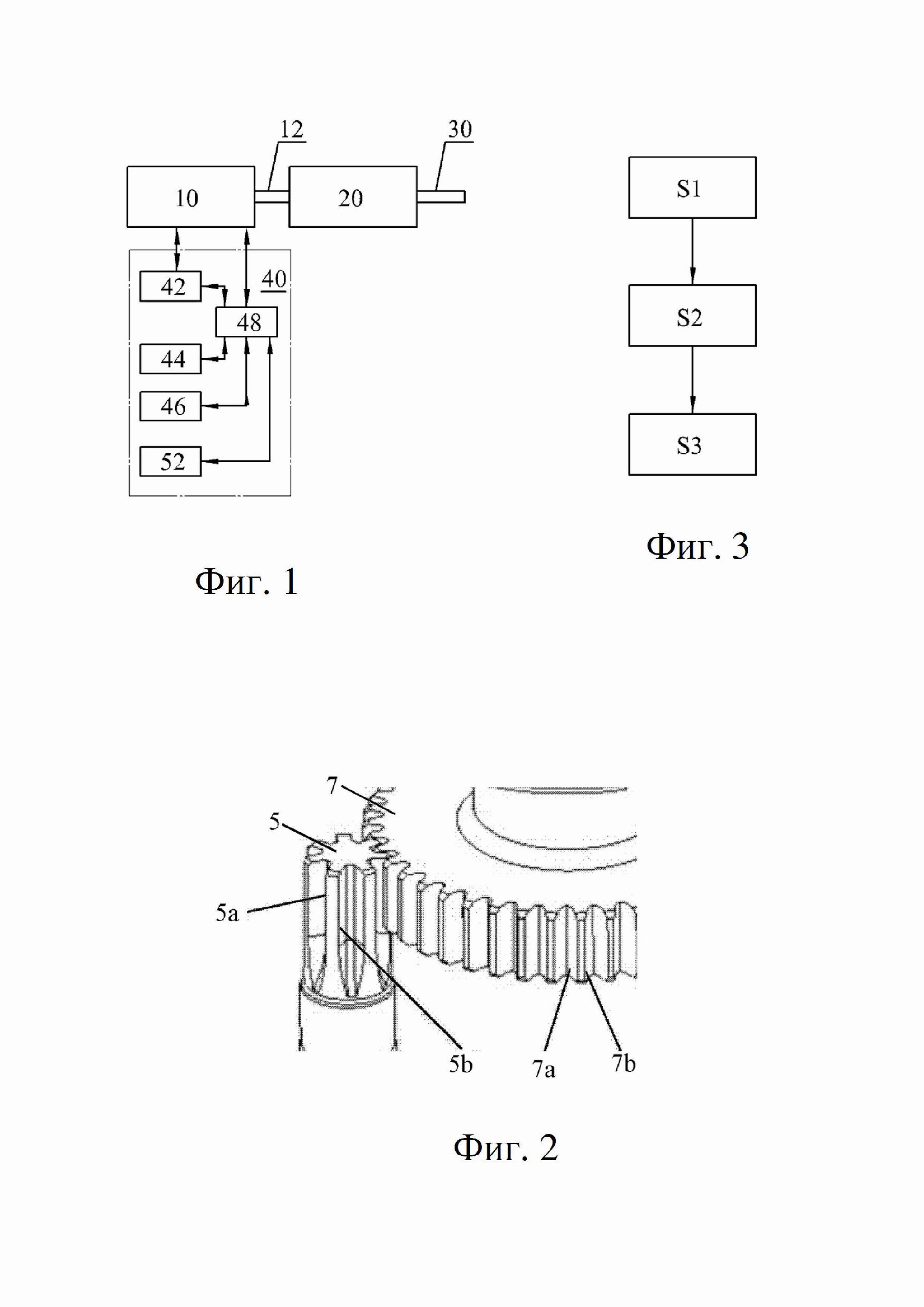
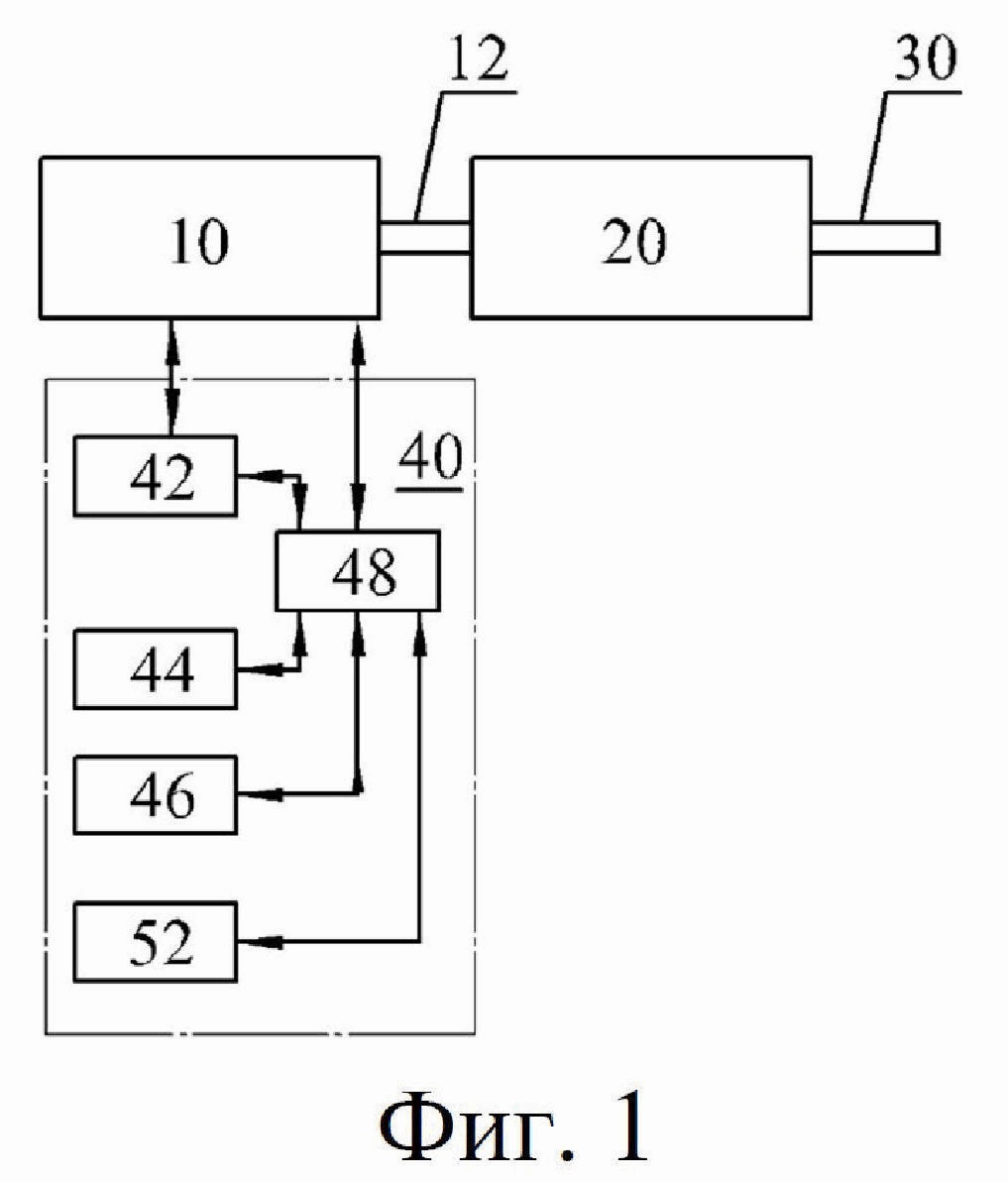
на фиг. 1 схематически показана упрощенная функциональная структурная схема электрического инструмента согласно принципам настоящей заявки;
на фиг. 2 показан частичный вид пары сцепленных зубчатых колес иллюстративного электрического инструмента согласно настоящей заявке;
на фиг. 3 показана блок-схема способа определения направления вращения электродвигателя с двунаправленным вращением электрического инструмента согласно принципам настоящей заявки; и
на фиг. 4 показано схематическое изображение, демонстрирующее суть эффективного цикла тока электрического инструмента.
Подробное описание изобретения
Настоящая заявка относится к электрическому инструменту, который содержит электродвигатель с двунаправленным вращением в качестве источника движущей силы и поочередно выполняет операции эффективного рабочего хода и холостого хода. В контексте настоящего документа термин «эффективный рабочий ход» относится к циклу хода, при котором заготовка или цель электрического инструмента подвергается эффективной операции и который по этой причине обладает большей нагрузкой и большим энергопотреблением; «холостой ход» или «ход возврата резца» относится к циклу хода, в котором заготовка или цель не подвергается эффективной операции и который по этой причине обладает меньшей нагрузкой и меньшим энергопотреблением. С другой точки зрения, электрический инструмент может производить возвратно-поступательное движение, возвратно-поступательное поворотное движение или однонаправленное вращательное движение; все эти движения, производимые электрическим инструментом, состоят из эффективного рабочего хода и холостого хода, которые чередуются друг с другом.
Основной принцип настоящей заявки заключается в следующем: на основании обнаружения тока в реальном времени в рабочем процессе электродвигателя с двунаправленным вращением электрического инструмента определяют, необходимо ли электрическому инструменту менять направление вращения, производимое электродвигателем с двунаправленным вращением, на обратное, когда начинается следующий рабочий процесс, согласно тому, отвечает ли соответствующему условию обратного хода параметр определения, связанный с этим током в реальном времени. В контексте настоящего документа термин «следующая операция» относится к операции, выполняемой электрическим инструментом, когда его снова запустят после завершения текущей операции, т.е. электрический инструмент выполнил одно действие выключения и одно действие включения между этим «рабочим процессом», когда был измерен ток в реальном времени, и «следующим рабочим процессом».
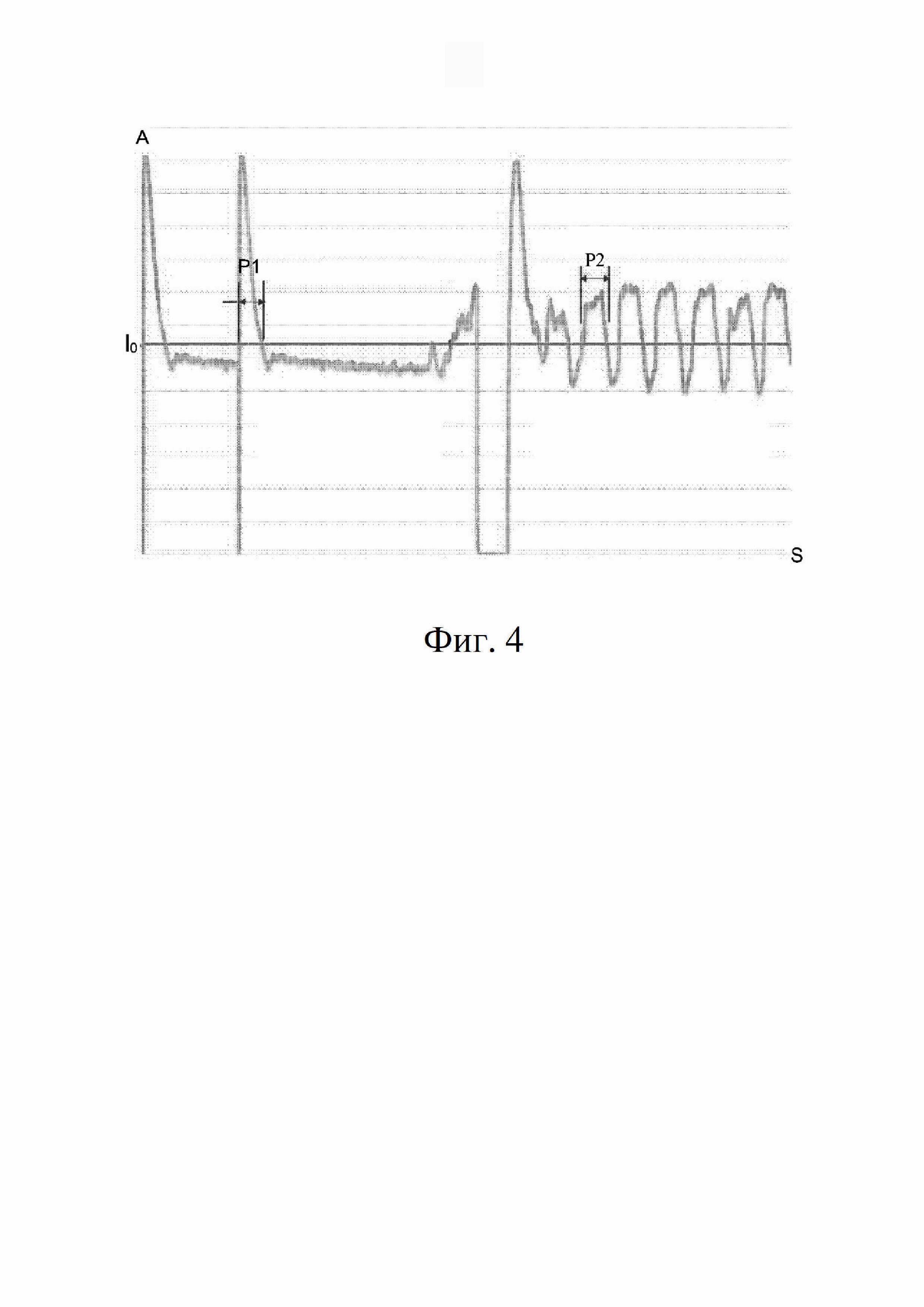
Согласно настоящей заявке «параметр определения, связанный с этим током в реальном времени» включает по меньшей мере одно из первого параметра определения и второго параметра определения, при этом первый параметр определения представляет собой количество раз, когда измеренный ток электродвигателя совершил эффективный цикл тока, с предыдущего изменения вращательного движения, производимого электродвигателем, на обратное, и соответствующим условием обратного хода является то, что количество раз равно или превышает конкретное число циклов тока N0 этого электрического инструмента. В контексте настоящего документа термин «эффективный цикл тока» определен следующим образом: начинаясь в момент, когда ток в реальном времени электродвигателя с двунаправленным вращением этого электрического инструмента проходит конкретный ток I0 от величины меньше конкретного тока I0 до величины больше конкретного тока I0, и заканчиваясь в момент, когда этот ток в реальном времени проходит конкретный ток I0 от величины больше конкретного тока I0 до величины меньше конкретного тока I0; второй параметр определения представляет собой суммарное время, в течение которого измеренный ток электродвигателя превысил конкретный ток этого электрического инструмента с предыдущего изменения вращательного движения, производимого электродвигателем, на обратное, и соответствующим условием обратного хода является то, что суммарное время достигло или превысило конкретную критическую продолжительность работы Т0этого электрического инструмента.
Перед тем, как представить подробное описание способа определения того, необходимо ли электрическому инструменту менять на противоположное направление производимого вращения электродвигателя с двунаправленным вращением при начале следующего рабочего процесса, на основании по меньшей мере одного из двух вышеупомянутых параметров определения, сначала будет предоставлено описание трех внутренних характеристик электрического инструмента, имеющих значение для настоящей заявки: конкретный ток I0, конкретное число циклов тока N0 и конкретная критическая продолжительность работы Т0.
В случае конкретного типа электрического инструмента с конкретным номером модели или для конкретного применения, в частности в случае электрического инструмента, содержащего зубчатый механизм передачи, на этапе проектирования электрического инструмента конструктор собирает и анализирует релевантные данные, такие как условия эксплуатации электрического инструмента, данные о нагрузке, которую необходимо выдерживать, ситуации возникновения отказа электрического инструмента и хронологические данные испытаний, для получения причинно-следственной связи между током электродвигателя электрического инструмента и износом зубчатых колес в электрическом инструменте, и тем самым заранее получая конкретный ток I0, конкретное число циклов тока N0 и конкретную критическую продолжительность работы Т0 для этого типа электрического инструмента с этим номером модели и для этого применения. Конкретный ток I0 по существу соответствует величине тока, когда электрический инструмент выполняет эффективный рабочий ход, а не холостой ход, и оба вышеупомянутых параметра определения согласно настоящей заявке связаны с этим конкретным током I0.
Эти параметры заранее сохранены в электрическом инструменте. В частности, как подробно описано ниже, электрический инструмент содержит блок управления, и вышеупомянутые параметры могут быть сохранены в запоминающем устройстве блока управления или в любом другом хранилище данных электрического инструмента. Следует отметить, что термин «конкретный» параметр или «конкретная» характеристика обозначают параметр или характеристику, которые являются специфичными или специально используются для электрического инструмента этого конкретного типа с этим конкретным номером модели и для этого конкретного применения; электрические инструменты других типов, или с другими номерами модели, или для других применений могут иметь другие параметры или характеристики.
Прежде всего, ниже приведено описание примера определения того, является ли направление производимого вращения электродвигателя с двунаправленным вращением электрического инструмента в следующем рабочем процессе идентичным или противоположным направлению вращения в предыдущем рабочем процессе, на основании первого параметра определения. В настоящей заявке предоставлен блок управления, предназначенный для осуществления этого процесса определения.
На фиг. 1 в упрощенной форме показана функциональная структурная схема электрического инструмента, содержащего электродвигатель с двунаправленным вращением и блок управления, как описано выше. Как изображено на фиг.1, с функциональной точки зрения, электрический инструмент главным образом содержит электродвигатель 10 с двунаправленным вращением, механизм 20 передачи, исполнительное устройство 30 и блок 40 управления для управления операцией изменения направления вращения, производимого электродвигателем 10, на обратное. Электродвигатель 10 с двунаправленным вращением передает вращательное движение механизма 20 передачи посредством выходного вала 12. Механизм 20 передачи присоединен между электродвигателем 10 и исполнительным устройством 30 и преобразует вращательное движение электродвигателя 10 в форму движения, подходящую для исполнительного устройства 30, и передает его исполнительному устройству 30. Исполнительное устройство 30 может представлять собой резцовую головку электрического инструмента или рабочий стержневой элемент, прикрепленный к резцовой головке или резцу электрического инструмента и приводящий резцовую головку или резец для выполнения ожидаемого действия на объект выполнения или заготовку.
Блок 40 управления содержит датчик 42 тока, запоминающее устройство 44, счетчик 46 и контроллер 48, находящийся в коммуникационном соединении с датчиком 42 тока, запоминающим устройством 44, счетчиком 46 и электродвигателем 10, при этом для обозначения коммуникационного соединения на структурной схеме, изображенной на фиг. 1, использованы соединительные линии в форме стрелок. Счетчик 46 выполнен с возможностью подсчета количества раз, когда измеренный ток (I) электродвигателя (10) совершил эффективный цикл тока с предыдущего изменения вращательного движения, производимого электродвигателем (10), на обратное. Датчик 42 тока выполнен с возможностью измерения в режиме реального времени тока в реальном времени I электродвигателя 10. Запоминающее устройство 44 выполнено с возможностью хранения всех релевантных параметров, включая изложенные выше, а также алгоритм вычислений или логический алгоритм, например, оно хранит по меньшей мере конкретный ток I0, конкретное число циклов тока N0 и конкретную критическую продолжительность работы Т0, упомянутые выше. Согласно настоящей заявке, начиная с момента, когда ток I электродвигателя 10 проходит конкретный ток I0от величины меньше конкретного тока I0 до величины больше конкретного тока I0, и заканчиваясь моментом, когда ток I проходит конкретный ток I0 от величины больше конкретного тока I0 до величины меньше конкретного тока I0, регистрируется один эффективный цикл тока. Суть эффективного цикла тока изображена на фиг. 4; Р1 и Р2 на фиг. 4 представляют эффективные циклы тока.
Когда электрический инструмент включают и он должен начать новый рабочий процесс, контроллер 48 прежде всего извлекает конкретное число циклов тока N0 этого электрического инструмента из запоминающего устройства 42 и определяет, превышает ли или равно ли текущее показание N счетчика 46 конкретному числу циклов тока N0. Если текущее показание N больше или равно конкретному числу циклов тока N0, то определяют, что направление вращения выходного вала 12 электродвигателя 10 с двунаправленным вращением противоположно направлению вращения выходного вала 12 электрического инструмента в предыдущем рабочем процессе, и в то же время счетчик 46 обнуляется; в ином случае направление вращения выходного вала 12 идентично направлению вращения в предыдущем рабочем процессе и счетчик 46 не обнуляется. Когда новый электрический инструмент доставляют для эксплуатации, показание N в счетчике 46 устанавливают равным 0, и когда новый электрический инструмент доставляют для эксплуатации, электродвигатель 10 имеет предустановленное начальное направление вращения.
После определения направления вращения выходного вала 12 электродвигателя 10 с двунаправленным вращением контроллер 48 подает команду электродвигателю 10 для начала запуска и датчик 42 тока блока 40 управления начинает отслеживать или измерять ток в реальном времени I электродвигателя 10 и передает измеренный ток I контроллеру 48. Контроллер 48 принимает измеренный ток I от датчика 42 тока и извлекает конкретный ток I0 и конкретное число циклов тока N0 этого электрического инструмента из запоминающего устройства 42. Контроллер 48 определяет, соответствует ли ток в реальном времени I вышеупомянутому определению «эффективного цикла тока», и когда он соответствует, определяет, что ток I электродвигателя 10 выполнил один эффективный цикл тока, в то же время контроллер 48 подает команду увеличить показание N счетчика 46 на 1. Это повторяется циклически до тех пор, пока этот рабочий процесс не завершится, и этот электрический инструмент затем выключают путем прекращения подачи энергии электродвигателю 10.
При следующем использовании электрического инструмента или когда электрический инструмент используют для выполнения следующего рабочего процесса, как указано выше, сначала выполняют определение, соответствует ли показание N в счетчике 46 значению N0 при завершении текущего рабочего процесса, и таким образом определяют последующее направление вращения электродвигателя 10.
В этом способе определения показание N в счетчике 46 электрического инструмента при завершении предыдущего рабочего процесса является единственным критерием для определения того, необходимо ли менять направление вращения выходного вала электродвигателя электрического инструмента на обратное в следующем рабочем процессе, и это показание N является количеством эффективных циклов тока, пройденных током электродвигателя с предыдущего изменения направления вращения электродвигателя электрического инструмента на обратное, т.е. количество раз, когда электрический инструмент выполнил эффективный рабочий ход. Как видно, основанием для управления изменением направления вращения электродвигателя на обратное блоком управления согласно настоящей заявке является количество раз, когда электрический инструмент выполнил эффективный рабочий ход, и это не связано с холостым ходом. По сравнению со способами определения известного уровня техники, которые не могут исключить холостой ход, способ определения согласно настоящей заявке является более точным.
Далее приведено описание примера определения того, является ли направление производимого вращения электродвигателя с двунаправленным вращением электрического инструмента в следующем рабочем процессе идентичным или противоположным направлению вращения в предыдущем рабочем процессе, на основании второго параметра определения.
Как указано выше, вторым параметром определения является суммарное время Т, в течение которого ток в реальном времени I превышает конкретный ток I0электрического инструмента. Соответственно, блок 40 управления содержит таймер 52 для суммирования общего времени, в течение которого ток в реальном времени I электродвигателя 10 превышает конкретный ток I0, и запоминающее устройство 42 блока 40 управления сохраняет конкретное критическое время Т0 для этого электрического инструмента.
При включении электрического инструмента контроллер 48 сначала извлекает из таймера 52 суммарное время Т этого электрического инструмента, когда закончился предыдущий рабочий процесс, извлекает конкретное критическое время Т0 этого электрического инструмента из запоминающего устройства 42 и определяет, достигло или превысило ли суммарное время Т конкретное критическое время Т0. Если суммарное время Т достигло или превысило конкретное критическое время Т0, контроллер 48 подает команду на изменение направления вращения выходного вала 12 электродвигателя 10 с двунаправленным вращением на противоположное направлению вращения выходного вала 12 электрического инструмента в предыдущем рабочем процессе и в то же время таймер 52 обнуляется; в ином случае направление вращения выходного вала 12 остается идентичным направлению вращения в предыдущем рабочем процессе и таймер 52 не обнуляется. Когда новый электрический инструмент доставляют для эксплуатации, суммарное время Т в таймере 52 устанавливают равным 0.
После того, как направление вращения выходного вала 12 электродвигателя 10 с двунаправленным вращением было определено, электродвигатель 10 начинает запуск и датчик 42 тока блока 40 управления начинает отслеживать или измерять ток в реальном времени I электродвигателя 10 и передает измеренный ток I контроллеру 48 в режиме реального времени. Контроллер 48 принимает измеренный ток I от датчика 42 тока, извлекает конкретный ток I0 этого электрического инструмента из запоминающего устройства 42 и подает команду счетчику 52 начать суммировать время, когда ток в реальном времени I больше конкретного тока I0. Когда ток в реальном времени I опускается ниже конкретного тока I0, контроллер 48 уведомляет счетчик 52 о том, что отсчет времени не нужно осуществлять до окончания этого рабочего процесса, и этот электрический инструмент затем выключают путем прекращения подачи энергии электродвигателю 10.
При следующем использовании электрического инструмента или когда электрический инструмент используют для начала следующего рабочего процесса, как указано выше, сначала выполняют определение, достигла или превысила ли продолжительность Т в таймере 52 конкретное критическое время Т0, когда предыдущий рабочий процесс завершился, и на основании этого определяют последующее направление вращения электродвигателя 10, а также определяют необходимость обнуления счетчика 52.
Снова рассмотрим фиг. 4, где можно увидеть, что благодаря тому, что конкретный ток I0 соответствует эффективному рабочему ходу электрического инструмента, временной период, в течение которого ток в реальном времени I больше конкретного тока I0 и продолжительность которого должна суммироваться счетчиком 52, также по существу соответствует эффективному рабочему ходу электрического инструмента и подобным образом также соответствует эффективному циклу тока, описанному применительно к первому параметру определения. Таким образом, этот второй способ определения и вышеописанный первый способ определения являются по существу одинаковыми и имеют одинаковые преимущества по сравнению с известным уровнем техники.
Предпочтительно контроллер блока 40 управления согласно настоящей заявке может одновременно определять эти два параметра определения. Другими словами, когда электрический инструмент начинает запускать новый рабочий процесс, контроллер 28 определяет, превысило ли показание N в счетчике 46 конкретное число циклов тока N0, и определяет, превысила ли продолжительность Т в счетчике 52 конкретное критическое время Т0, и если по меньшей мере одно из этих двух условий обратного хода соблюдено, подает команду электродвигателю 10 производить вращательное движение, обратное вращательному движению в предыдущем рабочем процессе, и в то же время счетчик 46 и счетчик 52 обнуляются. Напротив, если ни одно из двух условий обратного хода не соблюдено, электродвигатель 10 принимает команду не менять направление производимого вращательного движения на обратное и ни счетчик 46, ни счетчик 52 не обнуляются.
Принципы настоящей заявки, как описано выше, являются преимущественными для большинства электрических инструментов, содержащих электродвигатель с двунаправленным вращением и поочередно выполняющих эффективный рабочий ход и холостой ход. Электрический инструмент согласно настоящей заявке может представлять собой любой подходящий тип электрического инструмента, содержащий приводной электродвигатель 10 с двунаправленным вращением как описано выше, например, ручной электрический инструмент, который может представлять собой электрический инструмент для работы с твердым объектом, таким как бетон или каменная кладка, или может представлять собой электрический инструмент для работы с таким объектом как металл, пластик или древесина, например, электрический отбойный молоток, электрическую дрель или перфоратор. Электрический инструмент согласно настоящей заявке также может представлять собой электрическую пилу для разрезания заготовки, например, сабельную пилу.
Настоящая заявка является особенно преимущественной для электрических инструментов, содержащих зубчатые колеса, например, электрических инструментов, содержащих зубчатый механизм передачи. В качестве наглядного примера, на фиг. 2 изображена пара сцепленных зубчатых колес 5 и 7, содержащихся в определенном типе электрического инструмента.
На фиг. 2 зубчатое колесо 5 может быть использовано в качестве шестерни на выходном валу 12 электродвигателя 10. Когда выходной вал 12 электродвигателя 10, т.е. зубчатое колесо 5, вращается по часовой стрелке, стороны 5а и 7а зубцов пары зубчатых колес 5 и 7 сцепляются друг с другом и передают крутящий момент движущей силы. После того, как электрический инструмент выполнил N0 эффективных циклов тока или выполнил эффективный рабочий ход N0 раз или после того, как электрический инструмент осуществил конкретную критическую продолжительность работы Т0, стороны 5а и 7а зубцов зубчатых колес 5 и 7 выдерживали эффективную большую нагрузку и соответствующий сильный износ N0 раз. Согласно принципам настоящей заявки, в это время контроллер 48 подает команду на изменение направления вращения выходного вала 12 электродвигателя 10 на обратное, т.е. начинает производиться вращение против часовой стрелки. В это время стороны 5b и 7b зубцов этой пары зубчатых колес 5 и 7 сцепляются друг с другом и передают крутящий момент движущей силы; электрический инструмент снова выполняет N0эффективных циклов тока или выполняет эффективный рабочий ход N0 раз или снова осуществляет конкретную критическую продолжительность работы Т0, стороны 5а и 7а зубцов зубчатых колес 5 и 7 подобным образом выдерживают эффективную большую нагрузку и соответствующий сильный износ N0 раз, и выходной вал 12 электродвигателя 10 снова принимает команду на изменение направления вращения на противоположное, возвращаясь к вращению по часовой стрелке. Очевидно, что в этом случае, когда направлением производимого вращения электродвигателя 10 управляют согласно этой схеме, каждая сторона зубцов зубчатых колес выдерживает по существу равномерную нагрузку и износ, и это является оптимальным решением для зубчатых колес в целом и для электрического инструмента в целом. Эта схема управления является наиболее рациональной и наиболее оптимизированной, особенно для электрических инструментов, в которых нагрузки и продолжительности эффективного рабочего хода и холостого хода являются неопределенными или несбалансированными.
На фиг. 3 показана блок-схема способа определения направления вращательного движения, производимого электродвигателем 10 электрического инструмента, согласно принципам настоящей заявки. Способ включает следующие этапы:
S1) электрический инструмент включают, т.е. электрический инструмент должен начать новый рабочий процесс;
S2) контроллер 28 блока 40 управления определяет, отвечает ли параметр определения соответствующему условию обратного хода, и когда параметр определения отвечает соответствующему условию обратного хода, определяет, что направление вращательного движения, производимого электродвигателем 10, необходимо изменить на обратное относительно направления вращательного движения, производимого электродвигателем 10 в предыдущем рабочем процессе электрического инструмента, и в ином случае определяет, что электродвигатель 10 будет иметь такое же направление вращения;
S3) электродвигатель 10 приводят в действие, так что его выходной вал 12 вращается в направлении вращения, определенном на предыдущем этапе. Предпочтительно на этом этапе 3) контроллер 28 подает команду на обнуление счетчика 46 и таймера 52.
Настоящая заявка определяет необходимость изменения вращательного движения, производимого электродвигателем, на обратное, когда электрический инструмент находится в следующем рабочем процессе, исключительно на основании эффективного рабочего хода, выполняемого электрическим инструментом; такой способ управления обратным ходом исключает холостой ход, выполняемый электрическим инструментом, так что управления является более точным, внутренний износ электрического инструмента сведен к минимуму и срок службы максимально увеличивается. Это особенно верно для электрических инструментов, содержащих зубчатый механизм передачи; изменение вращения электродвигателя на обратное точно управляется согласно количеству раз, когда электрический инструмент или его зубчатый механизм передачи выдерживает эффективную нагрузку, или согласно длительности этой нагрузки, так что степень износа двух сцепленных поверхностей каждого зубца зубчатого колеса является сопоставимой и сбалансированной в максимальной степени, тем самым увеличивая срок службы зубчатого механизма передачи и всего электрического инструмента.
Настоящая заявка была изображена и описана на основании предпочтительных вариантов осуществления, но не ограничивается деталями, изображенными на фигурах и описанными выше в этом документе. Напротив, различные замены или изменения могут быть осуществлены без отступления от сути и объема, определенных в прилагаемой формуле изобретения.
Реферат
Изобретение относится к электротехнике. Технический результат заключается в повышении срока службы электрического инструмента за счет изменения направления вращательного движения электродвигателя инструмента. Раскрыты блок (40) управления и способ определения для определения направления вращения электродвигателя (10) электрического инструмента, содержащего блок (40) управления. Электродвигатель (10) представляет собой электродвигатель с двунаправленным вращением. Электрический инструмент выполняет эффективный рабочий ход и холостой ход поочередно в рабочем процессе. Блок (40) управления содержит датчик (42) тока и контроллер (48). Контроллер (48) выполнен с возможностью использования для определения, когда электрический инструмент начинает новый рабочий процесс, отвечает ли параметр определения соответствующему условию обратного направления; и для подачи, когда условие удовлетворяется, электродвигателю (10) команды на запуск так, чтобы направление вращательного движения, производимого таким образом, было обратным относительно направления вращательного движения в предыдущем рабочем процессе, при этом параметр определения и соответствующее условие обратного направления относятся к эффективному рабочему ходу, выполняемому электрическим инструментом с предыдущего изменения вращательного движения, производимого электродвигателем (10), на обратное. Способ определения по существу относится только к эффективному рабочему ходу электрического инструмента и не относится к холостому ходу, выполняемому электрическим инструментом. 3 н. и 13 з.п. ф-лы, 4 ил.
Комментарии