Предохранительное устройство для обнаружения недостаточности электрического торможения и для переключения на аварийный тормоз - RU2470813C2
Код документа: RU2470813C2
Чертежи
Описание
Настоящее изобретение относится к устройству для обнаружения недостаточности электрического торможения и для переключения на аварийный тормоз. Оно предназначено для транспортного средства на электрической тяге, например для железнодорожного транспортного средства.
Аварийное торможение обеспечивает надежное создание необходимого тормозного усилия.
В области железнодорожных транспортных средств в основном различают два типа торможения: рабочее торможение и аварийное торможение.
- Рабочее торможение является торможением, наиболее часто применяемым во время эксплуатации железнодорожных транспортных средств. Оно может быть изменяемым между минимальным значением усилия, близким к 0, и максимальным значением усилия. Система рабочего торможения может иметь несколько вариантов в зависимости от поезда: только электрический тормоз, только механический тормоз или комбинированный электрический и механический тормоз. Она предназначена для осуществления всех «нормальных» остановок и замедлений поезда, а также для сдерживающего торможения на уклонах. Однако она не является аварийной в том смысле, что использует много электрических, электронных, механических, пневматических или гидравлических компонентов, в которых может возникнуть неисправность и, следовательно, которые могут привести к усилию торможения, отличному от желаемого, и даже, учитывая новые цепи тяги со статической коммутацией тяга/торможение, к тяговому усилию.
- Аварийное торможение, как показывает его название, используют только в экстренных случаях. Этот экстренный случай может быть вызван либо внешними экстренными условиями, либо неисправностью рабочего тормоза. Задачей этого тормоза является максимально быстрая и максимально надежная остановка поезда. Этот тормоз не является изменяемым, а является аварийным, то есть возможность его выхода из строя является чрезвычайно низкой. Следовательно, этот тормоз должен использовать как можно меньше компонентов. Как правило, он является чисто механическим, но это требует его соответствующих размеров, что может отрицательно сказаться на его стоимости и массе, в частности, для высокоскоростного поезда, в котором рассеиваемая энергия торможения является достаточно большой. Поэтому представляет интерес реализация электрического аварийного торможения.
Электрическое устройство аварийного торможения описано в патентной заявке под названием «Устройство аварийного торможения с биполярным резистивным блоком с приводом на постоянных магнитах», поданной на имя Alstom Transport. Недостатком этого устройства является то, что его характеристика усилие/скорость электрического аварийного торможения зависит только от характеристик привода и от выбранного значения сопротивления тормозных резисторов, поэтому ее нельзя регулировать, в частности, она может привести к чрезмерным усилиям на высокой скорости, которые могут приводить к чрезмерному сцеплению или, наоборот, к слишком незначительным усилиям на низкой скорости. Устройство для улучшения этой характеристики усилие/скорость описано в патентной заявке под названием «Электрическое устройство аварийного торможения с приводом с постоянными магнитами и с регулированием тормозного момента», поданной на имя Alstom Transport, но оно требует добавления дополнительного оборудования.
Устройство, описанное в данном изобретении, должно позволить использовать рабочий электрический тормоз для аварийного торможения и применять аварийный тормоз только в случае отказа рабочего электрического тормоза, в результате чего получают следующие преимущества:
- используют все возможности динамического торможения рабочего тормоза в экстренной ситуации таким образом, чтобы оптимально использовать получаемое сцепление колесо/рельс,
- аварийный тормоз используют реже и только в случае отказа рабочего тормоза.
В этой связи объектом настоящего изобретения является система аварийного торможения, предназначенная для транспортного средства на электрической тяге, в частности для железнодорожного транспортного средства, оборудованного тяговой цепью, при этом система содержит
первый тормоз, не аварийный, электрический, интегрированный в тяговую цепь,
второй тормоз, аварийный,
характеризующаяся тем, что содержит
орган коммутации с первого тормоза на второй тормоз,
устройство контроля, выполненное с возможностью контроля эффективности торможения первого тормоза при помощи данных измерения силы тока,
устройство принятия решения на переключение с первого тормоза на второй тормоз при переходе заранее определенного порогового значения, обнаруженного при измерении силы тока, и
устройство для передачи команды на переключение, по меньшей мере, на один орган переключения.
Согласно частным вариантам выполнения аварийный тормоз содержит один или несколько следующих признаков:
- первый электрический тормоз содержит, в виде каскада, электромеханическую машину, выполненную с возможностью работы в режиме генератора напряжения, тяговый инвертор, выполненный с возможностью конфигурирования в виде диодного выпрямительного моста, электромеханический коммутатор для соединения электромеханической машины с инвертором, преобразователь с тормозным резистором преобразователя,
- первый рабочий электрический тормоз содержит линейный фильтр и линейный прерыватель,
- электромеханическая машина содержит ротор с постоянными магнитами,
- электромеханическая машина содержит, по меньшей мере, две обмотки, обеспечивающие циркуляцию, по меньшей мере, двух токов, смещенных по фазе относительно друг друга,
- второй тормоз является тормозом механического типа,
- второй тормоз является электрическим тормозом,
- второй электрический тормоз содержит электромеханическую машину, устройство создания тормозного момента, электромеханический коммутатор, выполненный с возможностью соединения электромеханической машины с устройством создания тормозного момента,
- устройство создания тормозного момента содержит диодный выпрямительный мост и резистор,
- второй электрический тормоз содержит диодный выпрямительный мост тягового инвертора, нагрузочный резистор, вспомогательное электромеханическое реле, последовательно соединенное с резистором и управляемое на входе, при этом блок, состоящий из реле и резистора, установлен между преобразователем и инвертором;
- устройство контроля соединено последовательно с инвертором;
- устройство контроля соединено последовательно с тормозным резистором преобразователя;
- устройство контроля, устройство принятия решения и устройство передачи команды переключения совместно образуют реле силы тока; и
- пороговое значение для устройства принятия решения выбирают таким образом, чтобы оно было ниже по существу постоянной области значений силы тока, отслеживаемой устройством контроля, когда скорость вращения электромеханической машины снижается от максимального значения, при этом первый тормоз является активным,
- решение устройства принятия решения задерживается, начиная от момента перехода заранее определенного порогового значения,
- решение устройства принятия решения деактивируется, если скорость является меньшей заранее определенного порогового значения.
Объектом настоящего изобретения является также способ аварийного торможения, предназначенный для транспортного средства на электрической тяге, в частности для железнодорожного транспортного средства, содержащий следующие этапы, на которых:
активируют первый неаварийный электрический тормоз,
контролируют эффективность первого неаварийного электрического тормоза путем измерений, по меньшей мере, одной переменной, характеризующей тормозное усилие, реализуемое первым электрическим тормозом,
детектируют переход этой переменной за пределы порогового значения,
торможение от первого неаварийного электрического тормоза переключают на второй аварийный тормоз, изолируя первый тормоз от электромеханической машины и активируя второй аварийный тормоз.
Согласно частным вариантам осуществления способ аварийного торможение содержит следующий признак:
- второй аварийный тормоз является электрическим тормозом.
Настоящее изобретение будет более очевидно из нижеследующего описания вариантов выполнения, представленных исключительно в качестве примеров, со ссылками на прилагаемые чертежи, на которых:
Фиг.1 - схематичный вид первого варианта выполнения системы торможения, содержащей первый, неаварийный, рабочий электрический тормоз и второй, аварийный, механический тормоз.
Фиг.2 - схематичный вид второго варианта выполнения системы торможения, в данном случае полностью электрической, содержащей первый неаварийный рабочий электрический тормоз и второй аварийный электрический тормоз.
Фиг.3 - схематичный вид третьего варианта выполнения системы торможения, в данном случае полностью электрической, содержащей первый неаварийный рабочий электрический тормоз и второй аварийный электрический тормоз.
Фиг.4 - схематичный вид версии первого варианта выполнения, показанного на фиг.1.
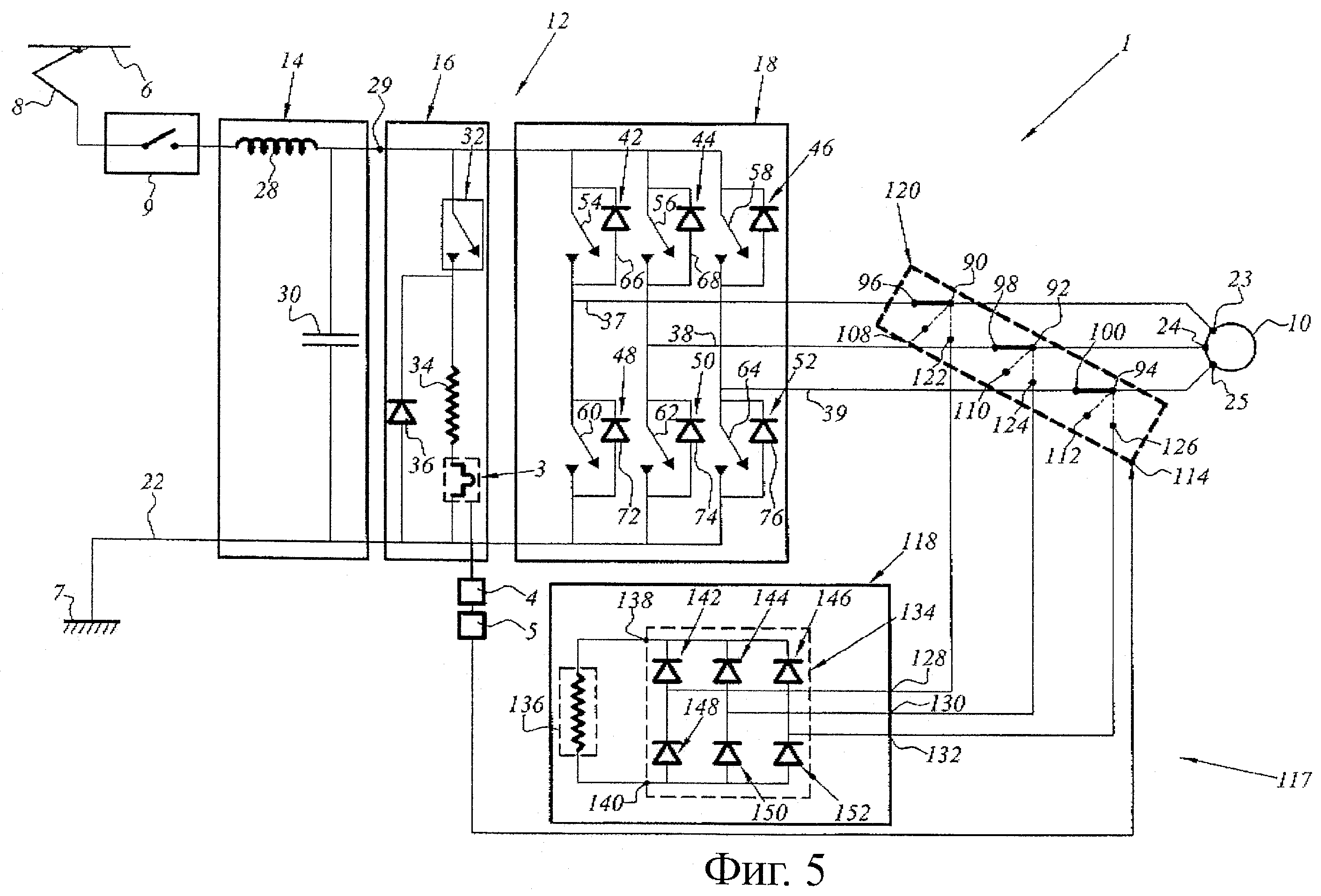
Фиг.5 - схематичный вид версии второго варианта выполнения, показанного на фиг.2.
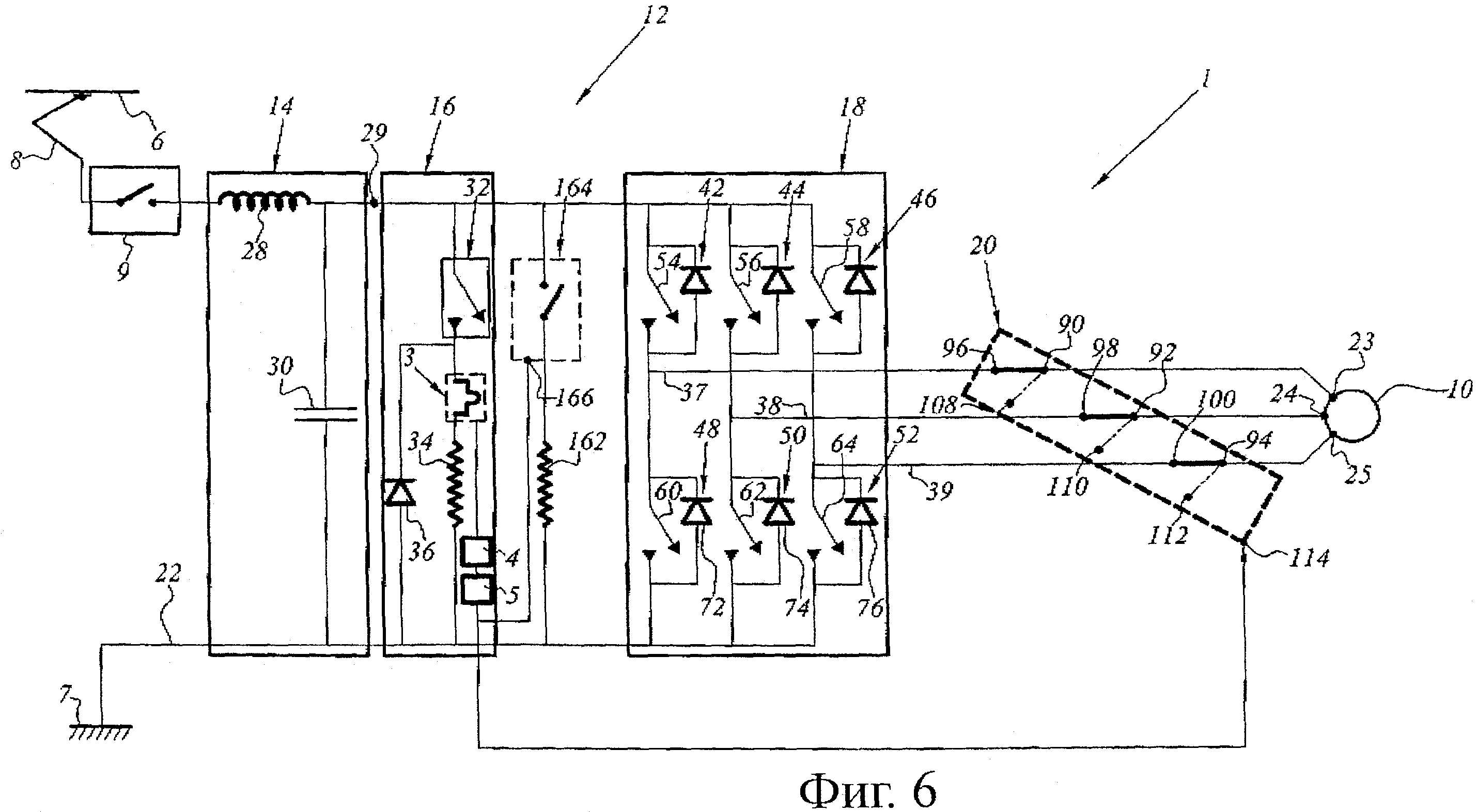
Фиг.6 - схематичный вид версии третьего варианта выполнения, показанного на фиг.3.
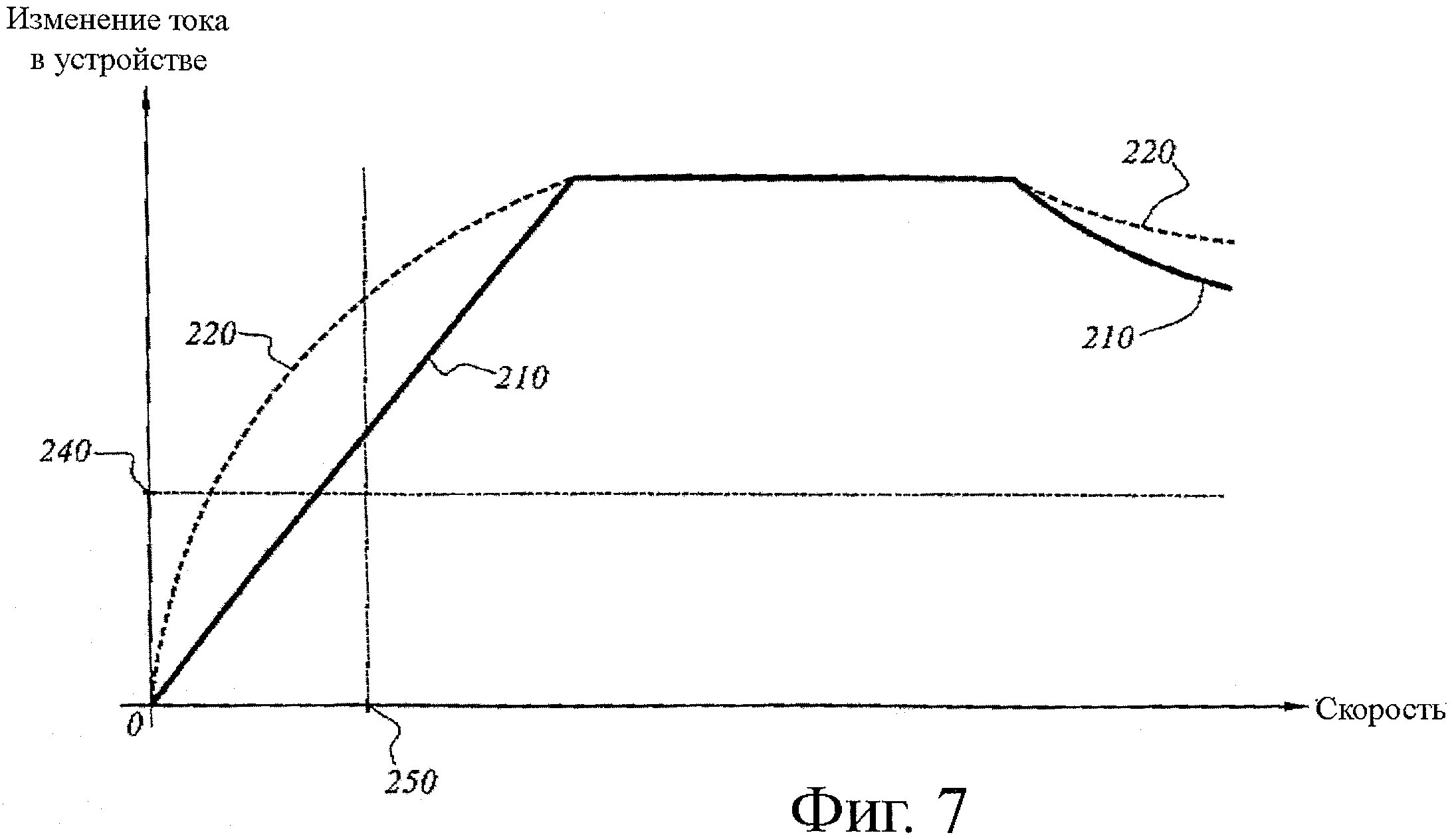
Фиг.7 - кривая тока, являющаяся функцией скорости вращения тягового двигателя, при помощи которой определяют пороговое значение срабатывания реле тока.
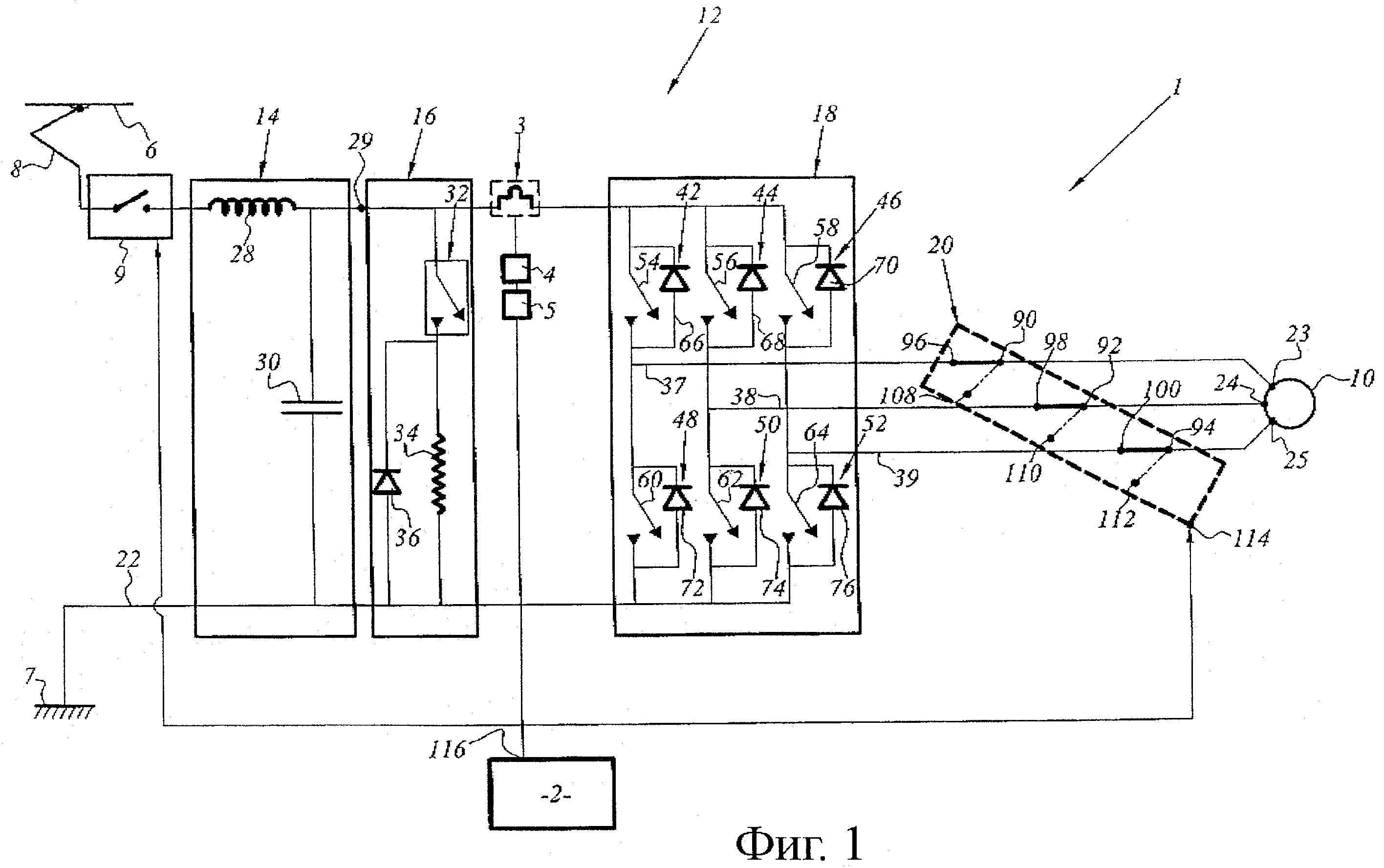
На фиг.1 показан первый вариант выполнения системы аварийного торможения, связанной с электрической тяговой цепью 1 железнодорожного транспортного средства.
Система торможения содержит первый рабочий электрический тормоз, интегрированный в электрическую тяговую цепь 1, и второй аварийный тормоз 2, в данном случае механический.
Система торможения содержит также устройство 3 контроля эффективности торможения первого тормоза на основании данных измерения силы тока, устройство 4 детектирования, выполненное с возможностью принятия решения на переключение с первого тормоза на второй тормоз при переходе заранее определенного порогового значения на основании измерения силы тока, и устройство 5 передачи команды переключения.
Электрическая тяговая цепь 1 питается от контактной линии (или от третьего рельса) 6 высокого напряжения относительно массы 7, соединенной с землей.
Электрическая тяговая цепь 1 содержит, в виде каскада, пантограф (или скользящий контакт) 8 для отбора электрической энергии от контактной линии (или третьего рельса) 6, за которым следует линейный прерыватель 9, выполняющий функцию главного выключателя/контактора между тяговой цепью 1 и контактной линией (или третьим рельсом) 6.
Тяговая цепь 1 содержит также вращающуюся электромеханическую машину 10 постоянного возбуждения, выполненную с возможностью получения питания от силового электронного преобразователя 12.
Силовой электронный преобразователь 12 содержит, в виде каскада от прерывателя 9 к электромеханической машине 10, линейный фильтр 14, классический реостатный тормозной преобразователь 16 и тяговый инвертор 18 в данном случае с трехфазным выходом, выполненный с возможностью подачи питания на вращающуюся машину 10 через электромеханический соединительный коммутатор 20.
Все элементы тяговой цепи 1 соединены с общей массой 7 через линию 22 обратного хода массы.
Вращающаяся электромеханическая машина 10 содержит статор с трехфазным в данном случае переменным питанием, снабженный входными электрическими контактами 23, 24, 25, и ротор, возбуждение которого обеспечивается постоянным магнитом.
В режиме электрической тяги электромеханическая машина 10 работает в качестве привода, тогда как в режиме электрического торможения она работает в качестве генератора напряжения.
Первый рабочий электрический тормоз содержит компоненты тяговой цепи 1, в частности, электромеханическую машину 10, инвертор 18, реостатный тормозной преобразователь 16 и линейный фильтр 14.
Линейный фильтр 14 имеет в данном случае классическую структуру "LC", содержащую линейную катушку 28 индуктивности, последовательно установленную между прерывателем 9 и линейным входом 29 преобразователя 16, и конденсатор 30, электрически соединенный параллельно возле входа 29 преобразователя 16.
Реостатный тормозной преобразователь 16 содержит силовой транзистор 32 типа IGBT (Insulated Gate Bipolar Transistor или биполярный транзистор с изолированным затвором), например, выполняющий роль регулятора и последовательно соединенный с реостатным тормозным резистором 34.
Преобразователь 16 содержит также обратный диод 36, параллельно подключенный к тормозному резистору 34.
Инвертор 18 содержит три трехфазные переменные выходные линии 37, 38, 39, каждая из которых выполнена с возможностью соединения соответственно с входным электрическом контактом 23, 24, 25 фазы статора привода 10 при помощи соединения, реализуемого электромеханическим коммутатором 20.
Инвертор 18 имеет классическую конструкцию с шестью электронными силовыми выключателями 42, 44, 46, 48, 50, 52, соединенными по трем фазам, подключенным между выходом входного фильтра 14 и обратной линией 22.
Каждый электронный силовой выключатель 42, 44, 46, 48, 50, 52 содержит соответственно силовой транзистор типа IGBT, например, 54, 56, 58, 60, 62, 64, управляемый по состоянию пропускания/запирания для командного тока, при этом каждый силовой транзистор связан с обратным диодом 66, 68, 70, 72, 74 и 76, установленным антипараллельно монтажу. В данном случае на фиг.1 стрелка каждого силового транзистора показывает направление прохождения тока, когда этот транзистор является пропускающим.
Каждый силовой выключатель 42, 44, 46 соответственно связан с силовым выключателем 48, 50, 52, при этом выход одного из первых соединен с входом одного из вторых и образует выход инвертора, при этом каждый выход соединен с выходной линией инвертора соответственно 37, 38, 39.
Цепи управления элементов коммутации на фиг.1 не показаны, и предполагается, что они выполнены с возможностью обеспечения синхронной тяговой работы привода 10.
Электромеханический коммутатор 20 содержит набор из трех входных контактных площадок 90, 92, 94, соединенных соответственно с тремя входными контактами 23, 24 и 25 фаз ротора привода 10.
Электромеханический коммутатор 20 содержит также первую группу выходных контактных площадок 96, 98, 100, соединенных соответственно с выходными линиями 37, 38, 39 инвертора 18.
Электромеханический коммутатор 20 содержит также вторую группу электрически изолированных выходных контактных площадок 108, 110 и 112, выполненных с возможностью соединения соответственно с входными контактными площадками 90, 92, 94 для изолирования привода от инвертора 18.
Электромеханический коммутатор 20 содержит командный вход 114, выполненный с возможностью приема команды переключения для переключения контакторов, образующих соединения между входными контактными площадками и выходными контактными площадками, с одной группы на другую.
Электромеханический коммутатор 20 отличается высокой степенью надежности и, следовательно, безопасности.
В данном случае, блок, состоящий из устройства 3 контроля, устройства 4 детектирования и устройства 5 передачи, выполнен в виде одного компонента: реле тока.
В другом варианте устройства 3, 4 и 5 образуют узел из трех отдельных компонентов.
В данном случае, как показано на фиг.1, устройство 3 контроля подключено между инвертором 18 и реостатным тормозным преобразователем 16.
Устройство 5 передачи выдает на выходе командный сигнал переключения, когда ток, измеренный при помощи реле тока, оказывается ниже заранее определенного порогового значения.
Выход состояния включено/выключено устройства 5 передачи соединен с входом 116 управления активацией механического тормоза 2 и с входом 114 управления электромеханического реле 20, выполненного с возможностью соединения/отсоединения между приводом 10 и инвертором 18.
Во время работы в тяговом режиме описанная со ссылками на фиг.1 тяговая цепь 1 конфигурирована для питания током привода 10 от контактной линии 6 через инвертор 18.
Силовой электронный преобразователь 12 использует конфигурацию инвертора для питания постоянным током, при этом линейный прерыватель 9 замкнут, а транзистор преобразователя 16 разомкнут.
В этом случае электромеханический коммутатор 20 конфигурирован таким образом, чтобы обеспечивать соединение выходных линий 37, 38, 39 инвертора 18 с входами питания 23, 24, 25 статора привода.
Во время рабочего торможения электромеханический коммутатор 20 сохраняет то же состояние, что и в режиме тяги.
Инвертор 18 конфигурирован для работы в режиме выпрямителя, а преобразователь 16 служит для ограничения мощности торможения, направляемой в линию 6, максимальной мощностью, которую может принять эта линия, при этом возможный избыток мощности торможения рассеивается в резисторе 34.
Этот режим работы является классическим режимом работы, называемым комбинацией рекуперация/реостатное торможение.
Можно также предусмотреть работу только в режиме реостатного торможения. В этом случае линейный прерыватель 9 разомкнут, инвертор работает также в режиме выпрямителя и подает в реостатный тормозной резистор 34 выпрямленный ток в зависимости от значения сопротивления реостатного резистора 34 преобразователя 16 и от выходного напряжения инвертора 18. Этот режим работы очень часто выбирают, когда электрический тормоз используют для аварийного торможения, так как размыкание прерывателя гарантирует, что момент, создаваемый приводом, не может быть положительным, то есть моментом тяги.
Даже в этом чисто реостатном режиме тормозной момент активно регулируется инвертором 18, работающим в режиме выпрямителя, при этом электронный выключатель 32 преобразователя 16 поддерживается в состоянии постоянной или почти постоянной проводимости за счет того, что в линию 6 не может поступать энергия, поскольку прерыватель 9 разомкнут.
Таким образом, независимо от режима работы рабочего электрического тормоза, используемого для аварийного торможения (комбинированный режим рекуперация/реостатное торможение или чисто реостатный режим), тормозной момент можно динамично регулировать в зависимости от скорости колес и от получаемого сцепления колесо/рельс. Таким образом, этот тормоз будет иметь максимальную эффективность, но не будет предохранительным, так как он содержит слишком много компонентов.
Устройство 4 детектирования при помощи устройства 3 контроля позволяет с уверенностью определять, имеет ли этот электрический тормоз достаточную эффективность, сравнивая ток, проходящий в этом устройстве 3, с заранее определенным пороговым значением. Действительно, поскольку тормозное усилие, необходимое при аварийном торможении, является постоянным (тормоз не является изменяемым), изменение тока в зависимости от скорости поезда в этом устройстве приблизительно будет иметь форму, показанную на фиг.7.
Таким образом, устройство 4 детектирования при взаимодействии с устройством 3 контроля может надежно детектировать недостаточность усилия электрического торможения.
В случае обнаружения недостаточности усилия электрического торможения устройство 5 коммутации может надежно производить переключение от электрического тормоза 1 на аварийный тормоз 2. Для этого оно направляет команду переключения на вход 114 коммутатора 20 и на вход 116 аварийного тормоза 2. В случае, если режим рабочего тормоза, используемого в качестве аварийного тормоза, является комбинированным режимом рекуперация/реостатное торможение, может также податься команда размыкания в прерыватель 9, гарантируя, таким образом, чтобы тяговая цепь 1 не перешла в режим тяги.
В другом варианте можно предусмотреть задержку подтверждения обнаружения устройством принятия решения, например, на интервал от одной до двух секунд, чтобы отфильтровать любую помеху типа ложной тревоги.
В другом варианте можно предусмотреть деактивацию устройства коммутации ниже заранее определенного порогового значения скорости, и в этом случае устройство 4 детектирования снабжают входом, не показанным на фигуре, для сигнала скорости поезда, чтобы в случае нормальной работы рабочего тормоза избежать переключения устройства на аварийный тормоз на низкой скорости. Действительно, характеристика контролируемого тока в зависимости от скорости (см. фиг.7) такова, что этот ток обязательно понизится до значения ниже контрольного порога, когда скорость становится очень низкой. Для сохранения предохраняющего свойства устройства необходимо, чтобы само пороговое значение скорости соответствовало требованиям безопасности.
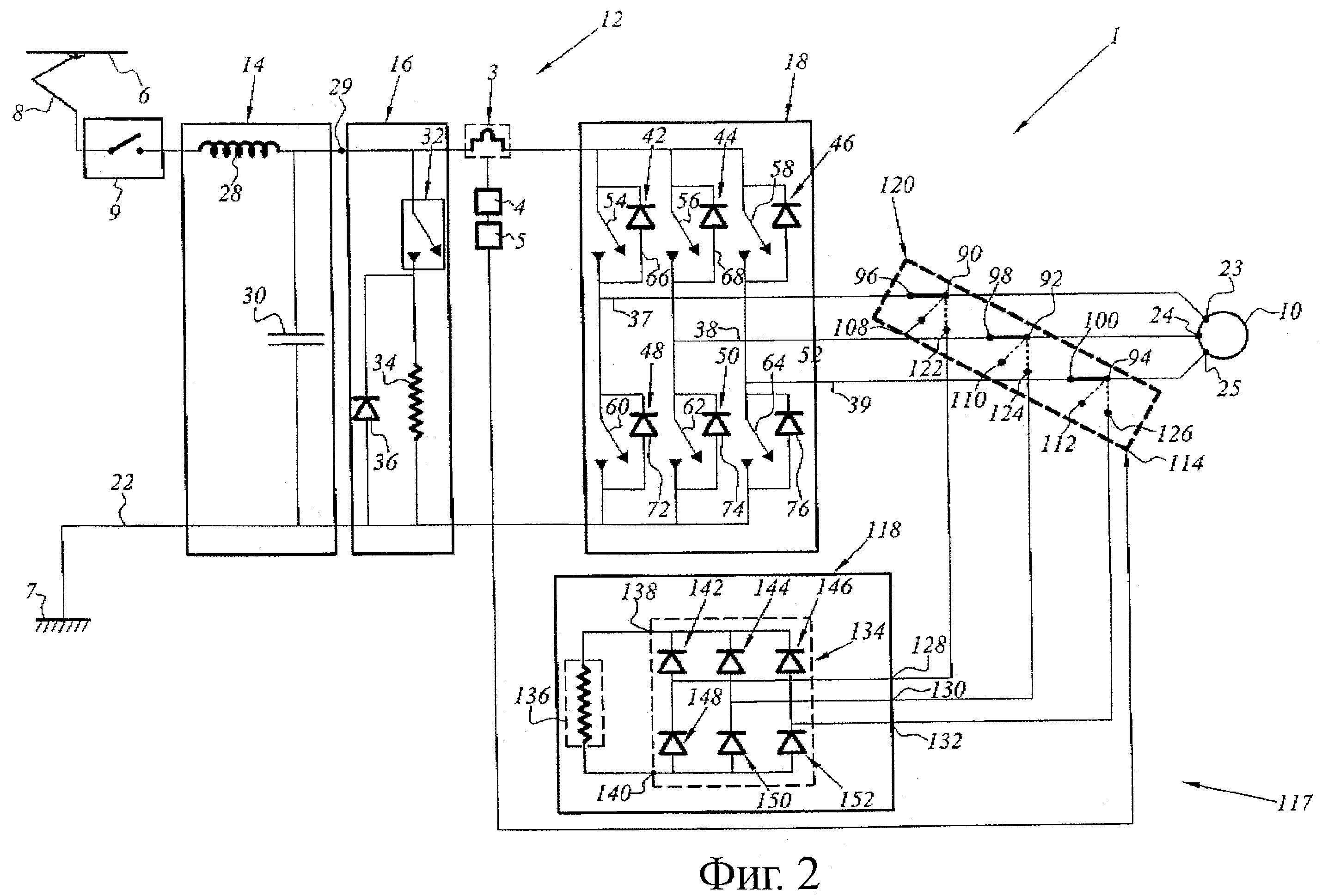
На фиг.2 показан второй вариант выполнения системы аварийного торможения, связанной с тяговой цепью 1, идентичной системе, показанной на фиг.1.
Отличается только аварийный тормоз 2, который в данном случае является электрическим тормозом 117, содержащим устройство 118 тормозного момента и электромеханический коммутатор 20, который в данном случае является электромеханическим коммутатором 20, содержащим третью группу выходных контактных площадок 122, 124, 126, соединенных соответственно с входами 128, 130, 132 устройства 118 производства тормозного момента.
Второй электрический тормоз 117 содержит генератор 10, электромеханический коммутатор 120 и устройство 118 создания тормозного момента.
Электромеханический коммутатор 120 выполнен с возможностью отсоединения входных контактных площадок 23, 24, 25 привода от выходных линий 37, 38, 39 инвертора 18, переключая электрические контакты первой группы контактных площадок 96, 98, 100 на вторую группу выходных контактных площадок 108, 110, 112 и изолируя, таким образом, привод 10 от инвертора 18.
Коммутатор 120 выполнен также с возможностью соединения входных контактов 23, 24, 25 с входами 128, 130, 132 устройства 118 создания тормозного момента второго тормоза 117.
Устройство 118 создания тормозного момента содержит классический диодный выпрямительный мост 134, в данной случае являющийся трехфазным, выполненный с возможностью получения питания на входах 128, 130, 132, и терминальный резистор 136 нагрузки, подключенный к мосту на выходах 138 и 140. В данном случае диодный выпрямительный мост содержит шесть диодов 142, 144, 146, 148, 150, 152, показанных на фиг.2.
Диодный выпрямительный мост 134 и резистор 136 нагрузки являются пассивными электрическими компонентами и не требуют никакого управления.
В варианте системы аварийного торможения, показанном на фиг.2, получают такие же режимы работы, что и в варианте, показанном на фиг.1, за исключением режима торможения, называемого аварийным.
В режиме аварийного торможения, когда устройство контроля 3 и устройство 4 принятия решения детектирует значение тока меньшее порогового значения, характерного для первого электрического тормоза, электромеханический коммутатор 120 производит переключение с первого электрического тормоза на второй тормоз 117.
Электромеханический коммутатор 120 отсоединяет электромеханическую машину 10 от инвертора 18, когда он получает команду переключения на второй тормоз 117 от устройства 5 передачи, и соединяет генератор 10 с устройством 118 создания тормозного момента.
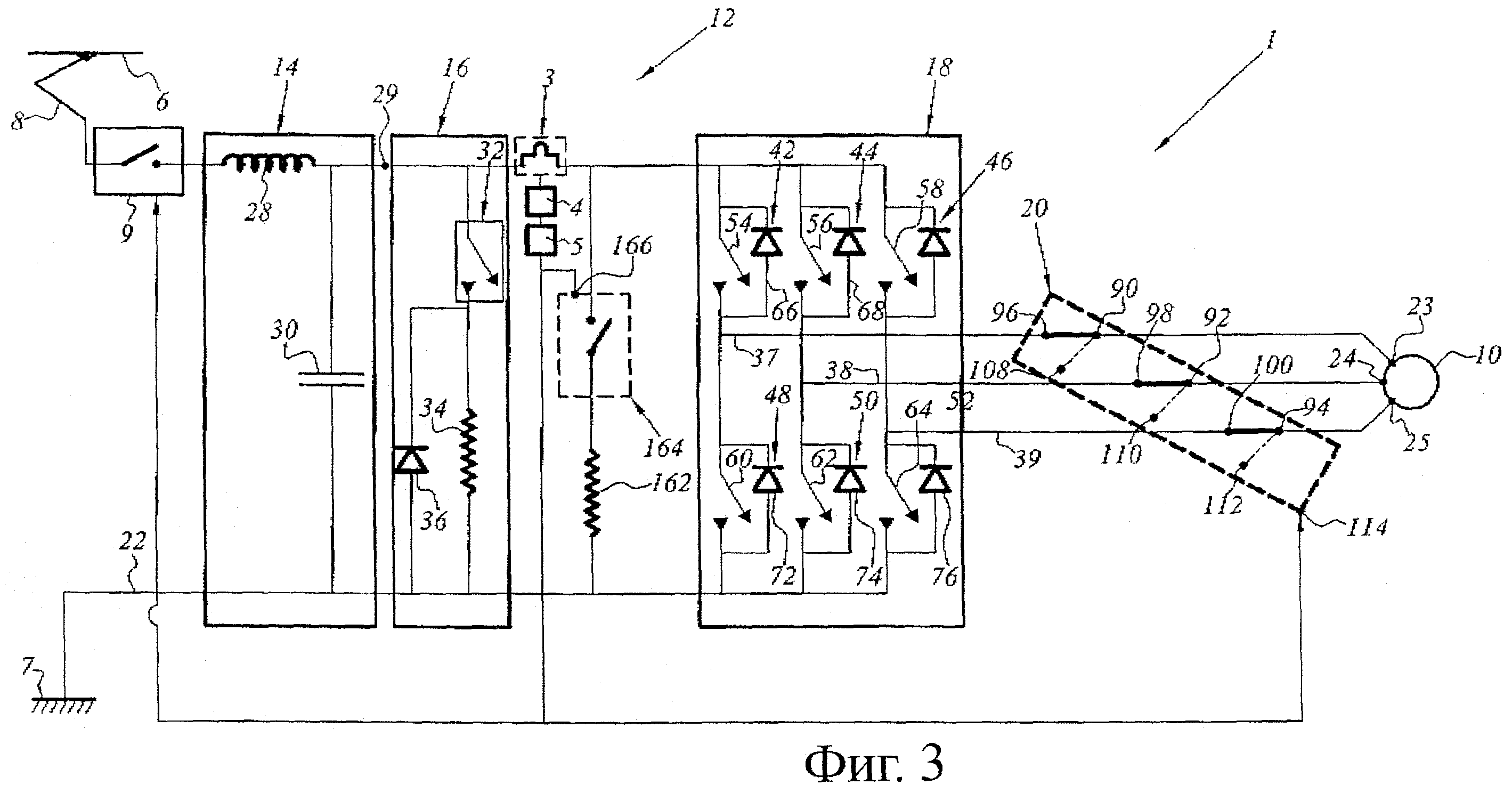
На фиг.3 показан третий вариант выполнения системы аварийного торможения, связанной с тяговой цепью 1, идентичной системе, показанной на фиг.1 и 2.
По сравнению с системой, показанной на фиг.1, второй тормоз в данном случае является электрическим тормозом, содержащим мост с обратными диодами 66, 68, 70, 72, 74, 76 инвертора 18, терминальный резистор 162 нагрузки, вспомогательное электромеханическое реле 164, последовательно соединенное с резистором 162 и управляемое на входе 166, при этом блок, состоящий из реле 164 и резистора 162, установлен между преобразователем 16 и инвертором 18.
Второй электрический тормоз содержит также вспомогательную цепь, которая на фиг.3 не показана, выполненную с возможностью блокирования команд на переход в состояние пропускания силовых транзисторов инвертора 18.
Монтаж устройств 3, 4, 5 в данном случае аналогичен монтажу, показанному на фиг.1.
Вместе с тем, в данном случае выход устройства 5 передачи или выход реле тока соединен с входом 114 электромеханического коммутатора 164 соединения нагрузки 162 второго тормоза с цепью блокирования команд замыкания силовых транзисторов инвертора 18 и, в случае необходимости, команды размыкания прерывателя 9.
В варианте системы аварийного торможения, показанном на фиг.3, получают такие же режимы работы, что и в вариантах, показанных на фиг.1 и 2, за исключением режима торможения, называемого аварийным.
В этом режиме торможения команды управления транзисторами инвертора 18 блокируются в ответ на команду переключения, поступающую из устройства 5 передачи.
В этом случае переключение на второй электрический тормоз обеспечивается замыканием вспомогательного электромеханического реле 164 на резистор 162 для создания момента аварийного торможения.
В вариантах, показанных на фиг.2 и 3, можно предусмотреть дополнительные схемы рассеяния электрической энергии, однако их описание опускается.
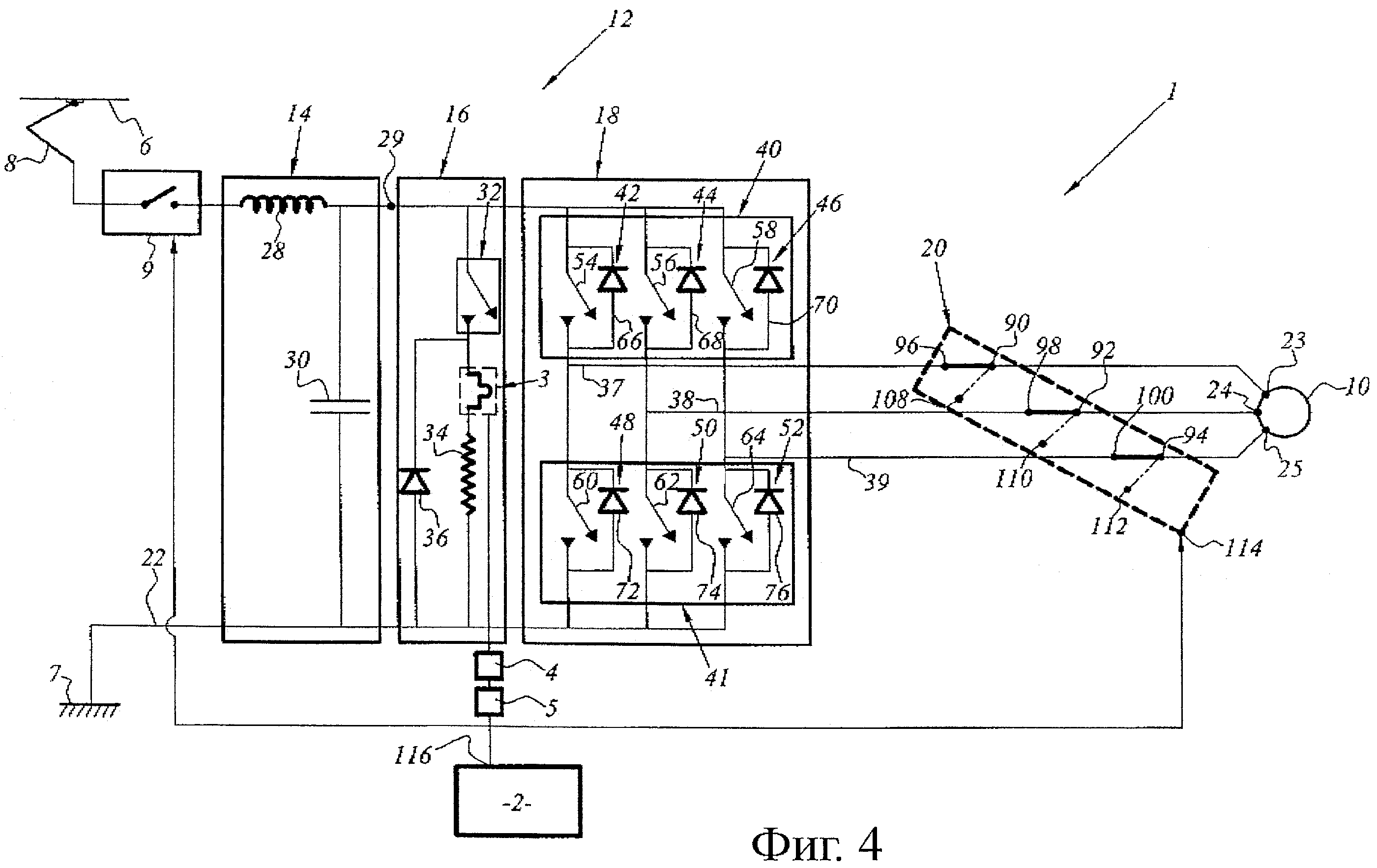
На фиг.4 показана версия первого варианта выполнения системы аварийного торможения, показанной на фиг.1, в которой блок устройств 3, 4, 5 последовательно соединен с резистором 34 преобразователя 16.
Работа системы торможения, показанной на фиг.4, аналогична работе системы, показанной на фиг.1, с тем отличием, что рабочее торможение, используемое во время аварийного торможения, в данном случае является реостатным торможением, при этом прерыватель 9 разомкнут.
На фиг.5 показана версия второго варианта выполнения системы торможения, показанной на фиг.2, в которой реле тока, образованное устройствами 3, 4, 5, последовательно соединено с резистором 34 преобразователя 16.
Работа системы торможения, показанной на фиг.5, аналогична работе системы, показанной на фиг.2, с тем отличием, что рабочее торможение, используемое для аварийного торможения, в данном случае является реостатным торможением, как на фиг.4.
На фиг.6 показана версия третьего варианта выполнения системы торможения, показанной на фиг.3, в которой реле тока 3, 4, 5 последовательно соединено с резистором 34 реостатного тормозного преобразователя 16.
Работа системы торможения, показанной на фиг.6, аналогична работе системы, показанной на фиг.3, с тем отличием, что рабочее торможение, используемое для аварийного торможения, в данном случае является реостатным торможением, как на фиг.4 и 5.
На фиг.7 показано изменение силы тока, проходящего в устройстве 3 контроля, в зависимости от скорости вращения привода, то есть от скорости поезда в отсутствие заклинивания колес. На этой фигуре показаны две возможные формы тока в виде кривых 210 и 220 в зависимости от того, находится ли устройство 3 на линии между реостатным преобразователем 16 и инвертором 18 (случай фиг.1, 2, 3, представленный кривой 210) или последовательно соединено с тормозным резистором (случай фиг.4, 5, 6, представленный кривой 220). Из этой фигуры видно, что контрольное пороговое значение 240 тока, ниже которого устройство 4 принятия решения обнаруживает недостаточность электрического торможения, может быть выбрано в широком диапазоне значений.
Из этой фигуры видно также, что ток стремится к 0, когда скорость стремится к 0. Таким образом, он неизбежно снизится ниже контрольного порогового значения на определенной, достаточно низкой скорости. Это устройство 4 детектирования обнаружит, таким образом, недостаточность электрического торможения на низкой скорости, что вполне нормально, так как усилие электрического торможения не может быть полностью реализовано до полезной скорости. Следовательно, устройство 5 коммутации переведет торможение на второй, аварийный тормоз. Это не является недостатком. Вместе с тем, этого желательно избегать, например, если такой переход приводит к определенному сбою тормозного момента (хотя и допустимому, так как в данном случае речь идет только о редко применяемом аварийном торможении). Чтобы этого избежать, можно блокировать устройство 4 детектирования при значении ниже определенного порога скорости 250 (пример показан на фиг.7). В этом случае необходимо, разумеется, чтобы порог скорости был безопасным, чтобы не утерять предохраняющего свойства устройства.
Преимуществом системы аварийного торможения, описанной со ссылками на фиг.1-6, является то, что первый рабочий электрический тормоз, контролируемый устройством 3 контроля, можно использовать для торможения типа аварийного, одновременно используя возможность регулирования тормозного момента в зависимости от скорости вращения колес.
Описанная система аварийного торможения предпочтительно позволяет:
- использовать все возможности динамического регулирования рабочего тормоза в экстренной ситуации таким образом, чтобы оптимально использовать получаемое сцепление колесо/рельс,
- реже задействовать аварийный тормоз и использовать его только в случае отказа электрического тормоза.
Совместное действие устройств контроля 3, принятия решения 4, передачи 5 команды переключения и второго аварийного тормоза 2, 117 является гарантией безопасности системы торможения.
При такой системе торможения обеспечивается регулирование тормозного момента на высокой скорости, при этом уменьшаются габариты системы торможения по сравнению с использованием только механического аварийного торможения.
С другой стороны, активное регулирование является более эффективным и требует меньших габаритов оборудования, чем пассивное регулирование, осуществляемое электрической системой аварийного торможения пассивного типа.
Реферат
Устройство обнаружения недостаточности электрического торможения и переключения на аварийный тормоз относится к транспортным средствам на электрической тяге, в частности к железнодорожным транспортным средствам. Устройство содержит первый, неаварийный, электрический тормоз, интегрированный в тяговую цепь, и второй аварийный тормоз. Устройство содержит также орган переключения с первого тормоза на второй тормоз, устройство контроля, выполненное с возможностью контроля эффективности торможения первого тормоза при помощи данных измерения силы тока, устройство принятия решения на переключение с первого тормоза на второй тормоз при переходе заранее определенного порогового значения и устройство передачи команды на переключение, по меньшей мере, на один орган переключения. Технический результат заключается в обеспечении регулирования тормозного момента на высокой скорости и уменьшении габаритов системы торможения. 2 н. и 16 з.п. ф-лы, 7 ил.
Комментарии