Способ (варианты) и система электропитания - RU2657247C2
Код документа: RU2657247C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к электрифицированному транспортному средству, и в частности, но не только, к системе и способу предотвращения наложения коммутации для предотвращения событий перенапряжения на одном или более коммутационных устройств системы электропитания.
УРОВЕНЬ ТЕХНИКИ
Транспортные средства с гибридным электрическим приводом (HEV), подключаемые к сети транспортные средства с гибридным электрическим приводом (PHEV), транспортные средства с электроприводом от аккумуляторных батарей (BEV), транспортные средства на топливных элементах и другие известные электрифицированные транспортные средства отличаются от традиционных моторных транспортных средств по той причине, что они приводятся в работу одной или более электрических машин (то есть электродвигателей и/или электрогенераторов) вместо или в дополнение к двигателю внутреннего сгорания. Высокое напряжение и высокий ток типично подаются на электрические машины одной или более аккумуляторных батарей, которые хранят электрическую энергию.
Электрифицированные транспортные средства типично применяют системы электропитания, которые поддерживают двунаправленный поток энергии в пределах транспортного средства. Системы электропитания включают в себя множество коммутационных устройств, которые выполняют коммутационные операции согласно сигналу возбуждения, вырабатываемому контроллером для управления нагрузкой. Например, электрифицированные транспортные средства часто включают в себя системы инвертера/конвертера, которые используют множество полупроводниковых коммутационных устройств, таких как мощные полевые (на основе перехода металл-оксид-полупроводник) МОП-транзисторы (MOSFET) или биполярные транзисторы с изолированным затвором (IGBT), которые избирательно подвергаются коммутационным операциям для питания энергией одного или более приводных электродвигателей переменного тока (AC) от аккумуляторной батареи постоянного тока (DC) или, в качестве альтернативы, для зарядки аккумуляторной батареи постоянного тока от источника переменного тока, такого как генератор.
Событие перенапряжения может вызываться различными факторами, такими как задержка регулирования напряжения и ошибка смещения датчика напряжения, и может возникать, когда коммутационное устройство системы электропитания подвергается коммутационным операциям между включенным состоянием (ON) и выключенным состоянием (OFF). Этот выброс напряжения возникает вследствие действия большой скорости изменения тока во время события коммутации, то есть di/dt, и паразитной индуктивности L (которое может быть сформулировано в качестве V=L∙di/dt).
Проблема выброса напряжения, описанная выше, может становиться более значимой у современных мощных коммутационных устройств, которые обычно способны к более быстрому включению и выключению (то есть большому di/dt). Коммутационные силовые преобразователи типично спроектированы, чтобы включать в себя относительно большой диапазон допустимых рабочих напряжений так, чтобы такой выброс напряжения мог поддерживаться ниже максимально допустимого напряжения коммутационного устройства. Однако, в случае многоплечевых коммутационных силовых преобразователей, таких как трехфазные инвертеры с ШИМ (широтно-импульсной модуляцией, PWM), широко применяемые в коммунальных, бытовых и автомобильных применениях, одновременные события коммутации среди двух или более плеч могут приводить к относительно большому выбросу напряжения на отдельном устройстве. Это может давать в результате относительно плохое использование максимально допустимого напряжения для многоплечевых коммутационных силовых преобразователей.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Способ согласно примерному аспекту настоящего изобретения включает в себя, среди прочего, управление системой электропитания для предотвращения события перенапряжения на одном или более коммутационных устройств системы электропитания, причем этап управления основан на информации о наложении коммутации, которая включает в себя команды для осуществления опережения или запаздывания сигнала коммутации, связанного с по меньшей мере одним из коммутационных устройств.
В дополнительном неограничивающем варианте осуществления вышеизложенного способа, способ включает в себя этап не модификации сигнала коммутации при отсутствии риска события перенапряжения.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов этап осуществления опережения или запаздывания сигнала коммутации включает в себя осуществление опережения или запаздывания одного или более фронтов импульсов сигнала коммутации.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов информация о наложении коммутации включает в себя оценку вероятности возникновения наложения коммутации между двумя или более сигналами коммутации.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов этап управления включает в себя осуществление опережения фронта первого импульса сигнала коммутации и осуществление запаздывания фронта второго импульса сигнала коммутации.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов фронт третьего импульса сигнала коммутации не подвергается ни опережению, ни запаздыванию.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов этап управления включает в себя осуществление опережения фронтов импульсов сигнала коммутации или осуществление запаздывания фронтов импульсов сигнала коммутации.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов этап управления включает в себя определение местоположения фронтов импульсов сигнала коммутации и проверку, запланировано ли, появление фронтов дополнительных импульсов вблизи фронтов импульсов сигнала коммутации.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов способ включает в себя вызов процедуры изменения положения фронтов импульсов, если фронты дополнительных импульсов запланированы вблизи фронтов импульсов сигнала коммутации.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов способ включает в себя назначение системы приоритетов, чтобы выбирать, какой из множества сигналов коммутации должен быть перестроен.
Способ согласно еще одному примерному аспекту настоящего изобретения включает в себя, среди прочего, управление системой электропитания транспортного средства для предотвращения события перенапряжения на одном или более коммутационных устройств системы электропитания посредством перестройки сигнала коммутации в ответ на наложение коммутации между двумя или более коммутационных устройств.
В дополнительном неограничивающем варианте осуществления вышеизложенного способа событие перенапряжения включает в себя выброс напряжения, который превышает максимально допустимое напряжение одного или более коммутационных устройств.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов перестройка сигнала коммутации включает в себя осуществление опережения фронта импульса сигнала коммутации или осуществление запаздывания фронта импульса сигнала коммутации.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов способ включает в себя игнорирование наложения коммутации, если есть опасность события перенапряжения.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов этап управления включает в себя осуществление опережения фронта первого импульса сигнала коммутации и задерживание фронта второго импульса сигнала коммутации.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов,способ включает в себя этап игнорирования третьего фронта импульса сигнала коммутации.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов наложение коммутации возникает, когда фронт первого импульса сигнала коммутации возникает одновременно с фронтом второго импульса второго сигнала коммутации.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов способ включает в себя назначение системы приоритетов для выбора того, какой из множества сигналов коммутации должен быть перестроен.
В дополнительном неограничивающем варианте осуществления любого из вышеизложенных способов этап управления включает в себя определение местоположения фронтов импульсов сигнала коммутации и проверку, запланировано ли появление фронтов дополнительных импульсов вблизи фронтов импульсов сигнала коммутации.
Система электропитания согласно еще одному примерному аспекту настоящего изобретения включает в себя, среди прочего, множество коммутационных устройств и систему предотвращения наложения коммутации, которая контролирует события коммутации множества коммутационных устройств, система предотвращения наложения коммутации выполнена с возможностью перестройки одного или более сигналов коммутации в ответ на наложение коммутации между двумя или более из множества коммутационных устройств для предотвращения события перенапряжения.
Варианты осуществления, примеры и альтернативные варианты предшествующих параграфов, пунктов формулы изобретения или последующего описания и чертежей, в том числе любые из их различных аспектов или соответствующих отдельных признаков, могут быть взяты независимо или в любой комбинации. Признаки, описанные в связи с одним вариантом осуществления, применимы ко всем вариантам осуществления, если такие признаки не являются несовместимыми.
Различные признаки и преимущества этого изобретения станут очевидными специалистам в данной области техники из последующего подробного описания. Чертежи, которые сопровождают описание предпочтительных вариантов осуществления изобретения, могут быть описаны кратко, как приведено ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
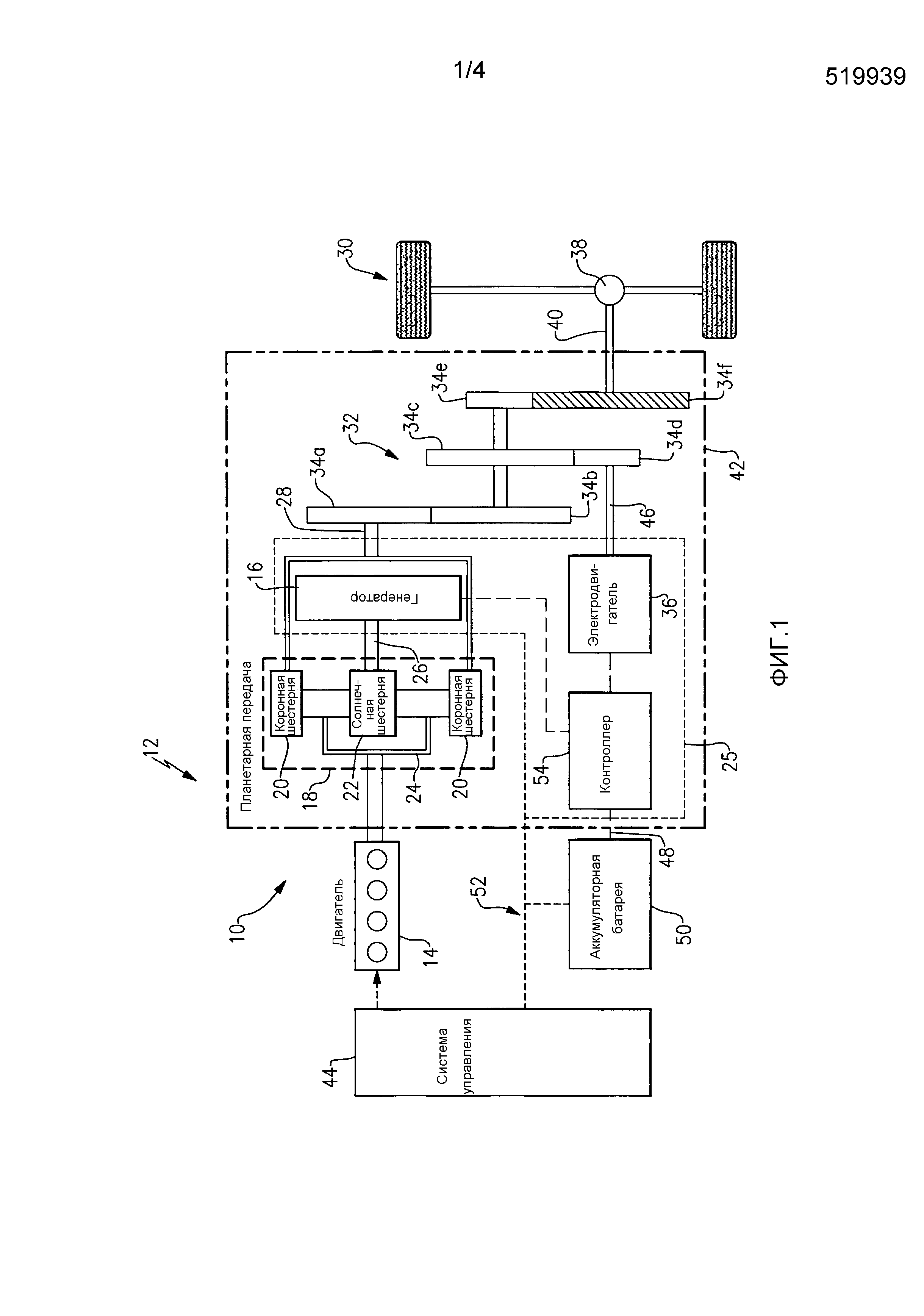
Фиг. 1 схематично иллюстрирует силовую передачу электрифицированного транспортного средства.
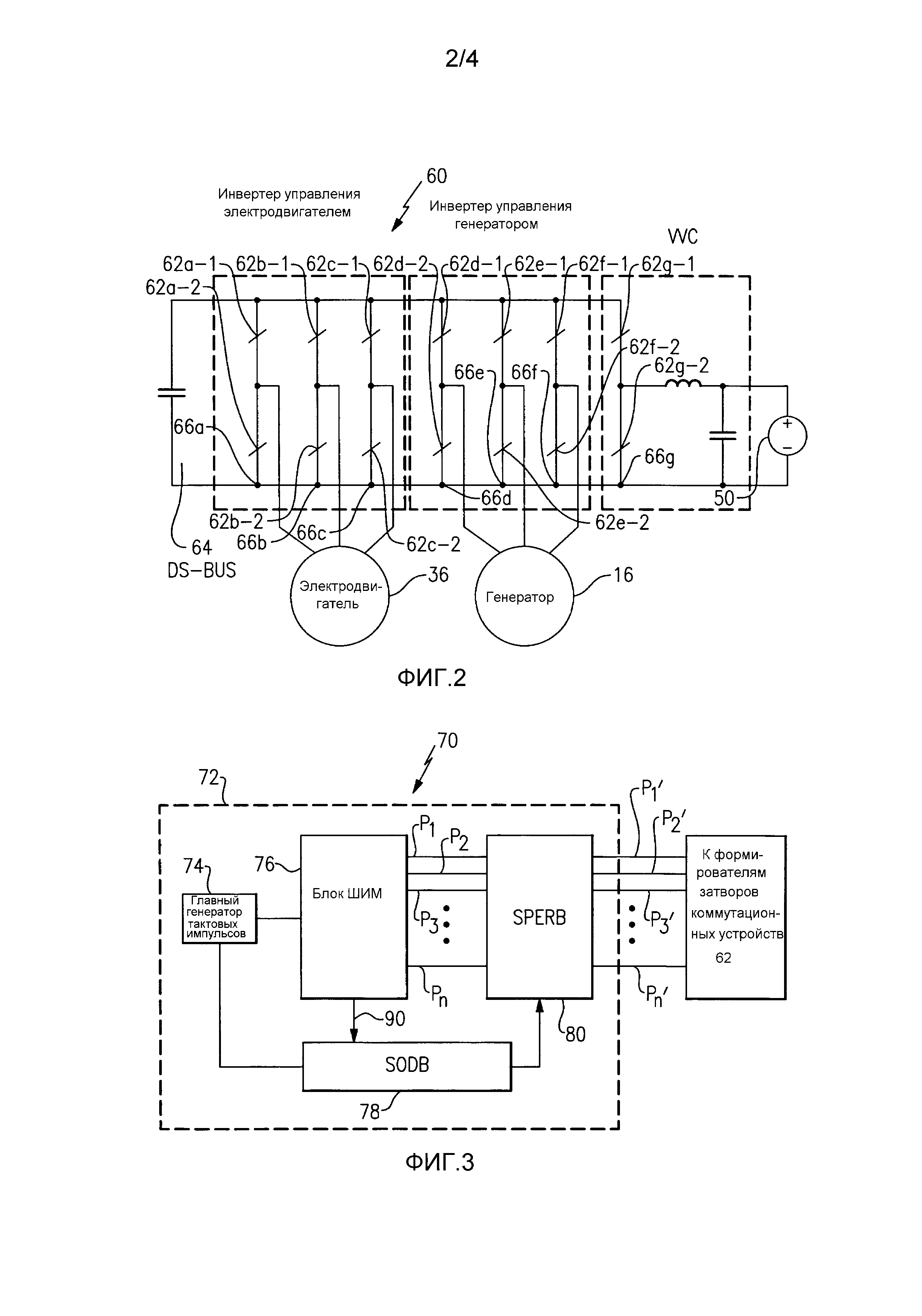
Фиг. 2 иллюстрирует топологию системы электропитания.
Фиг. 3 иллюстрирует систему предотвращения наложения коммутации, которая может использоваться для управления системой электропитания по фиг. 2.
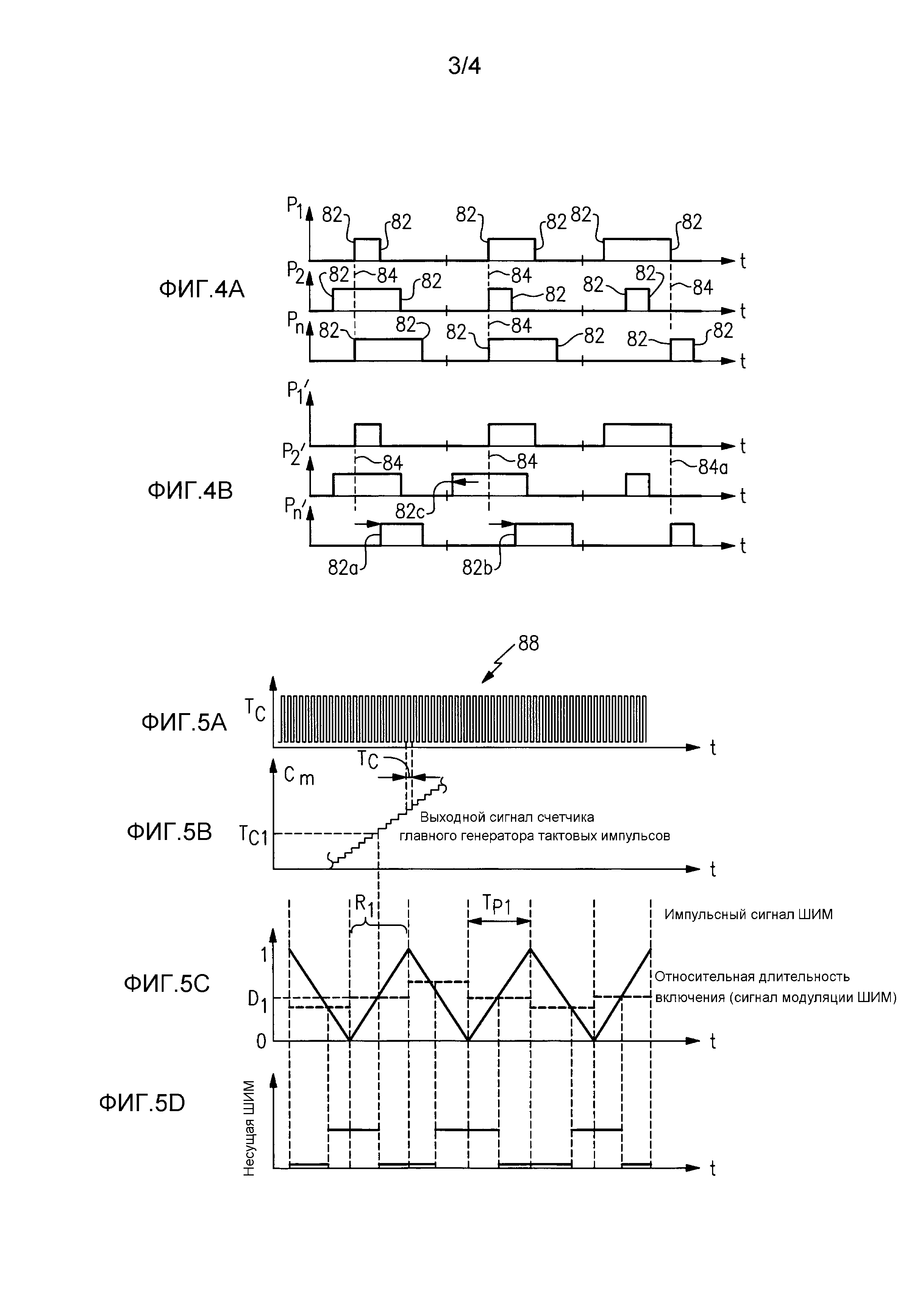
Фиг. 4A и 4B - графические представления сигналов коммутации, измеренных по времени, которые управляют коммутационными операциями системы электропитания.
Фиг. 5A, 5B, 5C и 5D схематично иллюстрируют способ выявления наложений сигналов коммутации с использованием системы предотвращения наложения коммутации по фиг. 3.
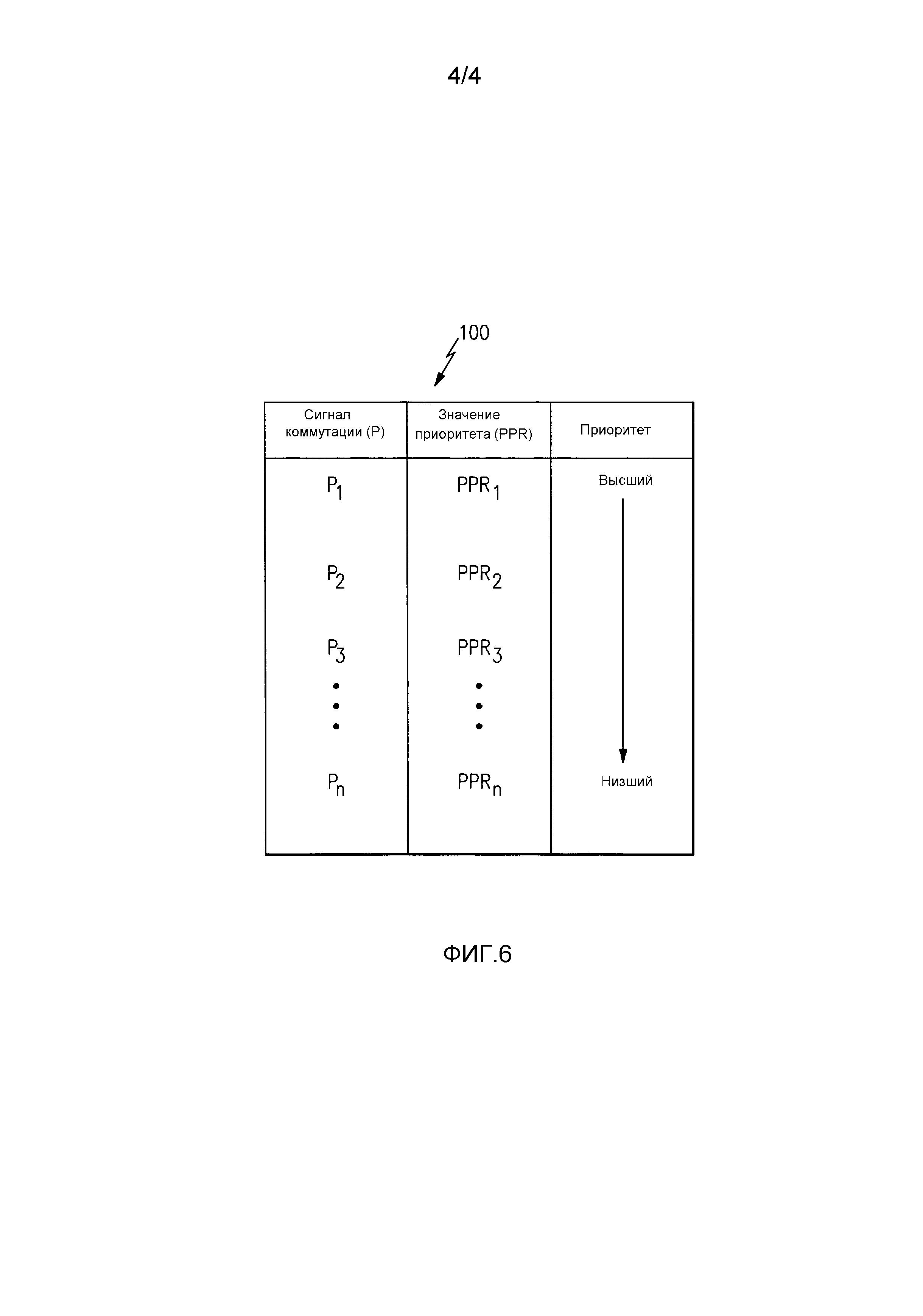
фиг. 6 схематично иллюстрирует систему приоритетов системы предотвращения наложения коммутации по фиг. 3.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к системе и способу предотвращения наложения коммутации для управления системой электропитания электрифицированного транспортного средства. Обладающая признаками изобретения система прогнозирует наложение между двумя или более коммутационными устройствами и модифицирует сигнал коммутации, связанный с по меньшей мере одним из коммутационных устройств, в ответ на выявленное наложение коммутации. Сигналы коммутации могут перестраиваться посредством осуществления опережения или запаздывания фронтов импульсов, которые представляют собой переходы включения/выключения, чтобы избегать события перенапряжения на одном или более коммутационных устройств. Наложение коммутации, идентифицированное совпадающими фронтами импульсов коммутации, в качестве альтернативы, может игнорироваться при отсутствии риска события перенапряжения. Эти и другие признаки обсуждены подробнее в материалах настоящего описания.
Фиг. 1 схематично иллюстрирует силовую передачу 10 для электрифицированного транспортного средства, такого как HEV. Хотя изображено в качестве HEV, следует понимать, что концепции, описанные в материалах настоящего описания, не ограничены HEV и могли бы распространять влияние на другие электрифицированные транспортные средства, в том числе, но не в качестве ограничения PHEV, BEV и транспортные средства на топливных элементах.
В одном из вариантов осуществления, силовая передача 10 является системой разделения мощности, которая применяет первую систему привода, которая включает в себя комбинацию двигателя 14 и генератора 16 (то есть первую электрическую машину) и вторую систему привода, которая включает в себя по меньшей мере электродвигатель 36 (то есть вторую электрическую машину), генератор 16 и аккумуляторную батарею 50. Например, электродвигатель 36, генератор 16 и аккумуляторная батарея 50 могут составлять систему 25 электропривода силовой передачи 10. Первая и вторая системы привода вырабатывают крутящий момент, чтобы приводить в движение один или более наборов ведущих колес 30 транспортного средства у электрифицированного транспортного средства 12.
Двигатель 14, такой как двигатель внутреннего сгорания, и генератор 16 могут быть соединены через узел 18 передачи мощности. В одном из неограничивающих вариантов осуществления узел 18 передачи мощности является планетарной зубчатой передачей. Конечно, другие типы узлов передачи мощности, в том числе другие зубчатые передачи и трансмиссии, могут использоваться для присоединения двигателя 14 к генератору 16. Узел 18 передачи мощности может включать в себя коронную шестерню 20, солнечную шестерню 22 и водило 24. Генератор 16 приводится в движение узлом 18 передачи мощности при действии в качестве генератора, чтобы преобразовывать кинетическую энергию в электрическую энергию. Генератор 16, в качестве альтернативы, может функционировать в качестве электродвигателя, чтобы преобразовывать электрическую энергию в кинетическую энергию, тем самым выводя крутящий момент на вал 26, присоединенный к водилу 24 узла 18 передачи мощности. Так как генератор 16 оперативно присоединен к двигателю 14, скорость вращения двигателя 14 может регулироваться генератором 16.
Коронная шестерня 20 узла 18 передачи мощности может быть присоединена к валу 28, который присоединен к ведущим колесам 30 транспортного средства через второй узел 32 передачи мощности. Второй узел 32 передачи мощности может включать в себя зубчатую передачу, имеющую множество шестерен 34A, 34B, 34C, 34D, 34E и 34F. Другие узлы передачи мощности также могут быть пригодны. Шестерни 34A-34F передают крутящий момент с двигателя 14 на дифференциал 38, чтобы выдавать тяговое усилие на ведущие колеса 30 транспортного средства. Дифференциал 38 может включать в себя множество шестерен, которые дают возможность передачи крутящего момента на ведущие колеса 30 транспортного средства. Второй узел 32 передачи мощности механически присоединен к полуоси 40 через дифференциал 38, чтобы распределять крутящий момент на ведущие колеса 30 транспортного средства.
Электродвигатель 36 также может применяться для приведения в движение ведущих колес 30 транспортного средства посредством вывода крутящего момента на вал 46, который также присоединен к второму узлу 32 передачи мощности. В одном из вариантов осуществления, электродвигатель 36 и генератор 16 являются частью системы рекуперативного торможения, в которой как электродвигатель 36, так и генератор могут применяться в качестве электродвигателей, чтобы выдавать крутящий момент. Например, электродвигатель 36 и генератор 16 каждый может выдавать электрическую энергию на шину 48 высокого напряжения и аккумуляторную батарею 50. Аккумуляторная батарея 50 может быть высоковольтной аккумуляторной батареей, которая способна к выдаче электрической энергии для приведения в действие электродвигателя 36 и генератора 16. Другие типы устройств накопления и/или устройств вывода энергии также могут быть включены в состав для использования с электрифицированным транспортным средством 12.
Электродвигатель 36, генератор 16, узел 18 передачи мощности и узел 32 передачи мощности могут в целом указываться ссылкой как коробка 42 передач в блоке с трансмиссией или трансмиссия электрифицированного транспортного средства 12. Таким образом, когда водитель выбирает конкретное положение переключения, коробка 42 передач в блоке с трансмиссией управляется надлежащим образом, чтобы предусматривать соответствующую передачу для продвижения электрифицированного транспортного средства 12, выдавая тяговое усилие на ведущие колеса 30 транспортного средства.
Силовая передача 10 дополнительно может включать в себя систему 44 управления для контроля и/или управления различными аспектами электрифицированного транспортного средства. Например, система 44 управления может поддерживать связь с системой 25 электропривода, узлами 18, 32 передачи мощности или другими компонентами для контроля и/или управления электрифицированным транспортным средством 12. Система 44 управления включает в себя электронику и/или программное обеспечение для выполнения необходимых функций управления для работы электрифицированного транспортного средства 12. В одном из вариантов осуществления, система 44 управления является комбинацией системного контроллера транспортного средства и модуля управления силовой передачей (VSC/PCM). Хотя показана в качестве единого аппаратного устройства, система 44 управления может включать в себя многочисленные контроллеры в форме многочисленных аппаратных устройств или многочисленных программных контроллеров в пределах одного или более аппаратных устройств.
Локальная сеть 52 контроллеров (CAN) предоставляет системе 44 управления возможность поддерживать связь с коробкой 42 передач в блоке с трансмиссией. Например, система 44 управления может принимать сигналы из коробки 42 передач в блоке с трансмиссией, чтобы указывать, возникает ли переход между положениями переключения. Система 44 управления также могла бы поддерживать связь с модулем управления аккумуляторной батареей аккумуляторной батареи 50 или другими устройствами управления.
Дополнительно, система 25 электропривода может включать в себя один или более контроллеров, таких как контроллер системы инвертера (ISC). Контроллер 54 выполнен с возможностью управлять специфичными компонентами в пределах коробки 42 передач в блоке с трансмиссией, таких как генератор 16 и/или электродвигатель 36, к примеру, для поддержки двунаправленного потока энергии. В одном из вариантов осуществления, контроллер 54 является контроллером системы инвертера, объединенным с регулируемым конвертером напряжения (ISC/VVC).
Фиг. 2 иллюстрирует систему 60 электропитания, которая может быть включена в электрифицированное транспортное средство. Например, система 60 электропитания может включать в себя систему инвертера, систему конвертера или комбинированный конвертер/инвертер напряжения электрифицированного транспортного средства 12 по фиг. 1. В одном из вариантов осуществления, система 60 электропитания включает в себя инвертер управления электродвигателем, инвертер управления генератором и регулируемый конвертер напряжения (VVC). Система 60 электропитания выводит питание для управления нагрузками, такими как электродвигатель 36 и генератор 16, посредством переключения одного или более коммутационных устройств 62.
В одном из вариантов осуществления, система 60 электропитания включает в себя многочисленные коммутационные устройства 62. Коммутационные устройства 62 могут подвергаться коммутационным операциям (то есть переключению между включенным и выключенным состоянием), чтобы питать нагрузки с использованием энергии из аккумуляторной батареи 50 или, в качестве альтернативы, чтобы заряжать аккумуляторную батарею по шине 64 постоянного тока. В одном из вариантов осуществления, коммутационные устройства являются IGBT. В еще одном варианте осуществления, коммутационные устройства 62 являются мощными MOSFET. Другие коммутационные устройства и другие конфигурации системы 60 электропитания предполагаются в качестве находящихся в пределах объема этого изобретения.
Система 60 электропитания может включать в себя многочисленные плечи 66 коммутационных устройства 62, которые присоединены параллельно. Каждое плечо 66 включает в себя первое и второе коммутационные устройства 62a,b,c,d,e,f,g-1, 62a,b,c,d,e,f,g-2, присоединенные соответственно последовательно. Предусмотренное количество плеч 66 может соответствовать общему количеству фаз нагрузок и источников, которыми в одном из вариантов осуществления являются трехфазный электродвигатель 36, трехфазный генератор 16 и аккумуляторная батарея 50. Соответственно, в одном из вариантов осуществления, система 60 электропитания включает в себя семь плеч 66a, 66b, 66c, 66d, 66e, 66f и 66g коммутационных устройств 62 для управления потоком энергии между нагрузками и источником. Однако, следует принимать во внимание, что система 60 электропитания могла бы включать в себя любое количество плеч коммутационных устройств для энергоснабжения нагрузок, имеющих любое количество фаз.
В одном из вариантов осуществления, коммутационные устройства 62a,b,c,d,e,f,g-1, 62a,b,c,d,e,f,g-2каждого плеча с 66a по 66g могут альтернативно переключаться между включенным и выключенным положениями, чтобы преобразовывать питание постоянного тока в питание трехфазного переменного тока для возбуждения электродвигателя 36 и генератора 16, или чтобы преобразовывать в разные уровни напряжения питания постоянного тока для аккумуляторной батареи 50 высокого напряжения. Наложение коммутации может возникать во время событий коммутации различных коммутационных устройств 62, которые могут приводить к событию перенапряжения (то есть, выбросу напряжения, который превышает максимально допустимое напряжение коммутационного устройства 62) на одном или более из коммутационных устройств 62. Как подробнее обсуждено ниже, примерные система и способ прогнозирования наложения коммутации и перестройки сигналов коммутации для предотвращения наложения коммутации могут использоваться для управления системой 60 электропитания.
Фиг. 3 иллюстрирует систему 70 предотвращения наложения коммутации, которая может использоваться для управления системой 60 электропитания по фиг. 2. В одном из вариантов осуществления, система 70 предотвращения наложения коммутации является частью контроллера 72 системы 60 электропитания. Как может быть принято во внимание, в одном из вариантов осуществления, система 70 предотвращения наложения коммутации реализована в качестве программного обеспечения в контроллере 72. Например, система 70 предотвращения наложения коммутации может применять один или более алгоритмов, запрограммированных в контроллер 72, чтобы прогнозировать и предотвращать наложение коммутации. В качестве альтернативы, в еще одном варианте осуществления, система 70 предотвращения наложения коммутации могла бы быть реализована в качестве выполненной по индивидуальному заказу аппаратной схемы системы 60 электропитания.
Примерная система 70 наложения коммутации включает в себя главный генератор 74 тактовых импульсов, блок 76 широтно-импульсной модуляции (ШИМ), блок 78 выявления наложения коммутации (SODB) и блок 80 изменения положения фронтов импульсов коммутации (SPERB). Главный генератор 74 тактовых импульсов дает привязку ко времени для системы 70 предотвращения наложения коммутации. В одном из вариантов осуществления, главный генератор 74 тактовых импульсов создает поток импульсов, которые бывают в форме прямоугольной волны (смотрите график (a) по фиг. 5). Другие форматы тактового сигнала также предполагаются в пределах объема этого изобретения.
Блок 76 ШИМ формирует сигналы с P1 по Pn коммутации для управления коммутационными операциями коммутационных устройств 62 системы 60 электропитания. Сигналы с P1 по Pn коммутации получаются из главного генератора 74 тактовых сигналов и могут формироваться в качестве кратных целых чисел отсчетов главного генератора 74 тактовых импульсов. Сигналы с P1 по Pn коммутации заключают в себе информацию о событиях коммутации для управления коммутационными устройствами между включенным и выключенным положениями.
В одном из вариантов осуществления, SODB 78 может прогнозировать наложения коммутации, контролируя блок 76 ШИМ со схемой синхронизации, приводимой в действие главным генератором 74 тактовых импульсов. SPERB 80 затем может перепланировать накладывающиеся фронты импульсов сигналов с P1 по Pn коммутации и передавать перестроенные сигналы с P1ʹ по Pnʹ коммутации на формирователи затвора коммутационных устройств 62. SPERB 80 может перепланировать один или более сигналов с P1 по Pn коммутации посредством осуществления опережения или запаздывания фронтов импульсов этих сигналов. Общая длительность импульса сигналов с P1ʹ по Pnʹ коммутации может подвергаться влиянию этой перестройки. Между SODB 78 и SPERB 80 гарантируется, что подвергнутые изменению положения фронты импульсов сигналов с P1 по Pn коммутации не вызывают непреднамеренного наложения коммутации.
Фиг. 4 (с непрерывной ссылкой на фиг. 3) схематично иллюстрирует основной принцип работы системы 70 предотвращения наложения коммутации. Блок 76 ШИМ может формировать любое количество сигналов с P1 по Pn коммутации за время t, которые могут впоследствии передаваться на формирователи затворов коммутационных устройств 62 для управления различными событиями коммутации. SODB 78 располагает фронты 82 импульсов (то есть передние фронты или задние фронты), связанные с каждым сигналом с P1 по Pn коммутации и оценивает, есть ли вероятность, что наложение 84 коммутации произойдет между двумя или более сигналами с P1 по Pn коммутации. Наложение 84 коммутации может возникать, когда фронт 82 импульса одного из сигналов с P1 по Pn коммутации возникает одновременно с другим фронтом 82 импульса из другого сигнала с P1 по Pn коммутации. Это показано на графике (a) по фиг. 4.
Информация о наложении коммутации может сообщаться из SODB 78 в SPERB 80. Если есть потенциальная возможность для одного или более наложений 84 коммутации, SPERB 80 выполнен с возможностью перестройки одного или более сигналов с P1 по Pn коммутации для устранения наложения коммутации. Это показано на графике (b) по фиг. 4. В одном из вариантов осуществления, SPERB 80 может перестраивать сигналы с P1 по Pn коммутации посредством осуществления опережения или задержки фронта(ов) 82 импульса, связанного с одним или более из сигналов с P1 по Pn коммутации, для создания перестроенных сигналов с P1ʹ по Pnʹ коммутации. Фронты 82a и 82b импульсов перестроенного сигнала Pnʹ коммутации являются примерами подвергнутых запаздыванию сигналов, а фронт 82c импульса перестроенного сигнала P2ʹ коммутации является примером сигнала, который был подвергнут опережению вследствие потенциальной возможности для наложения коммутации. Перестроенные сигналы с P1ʹ по Pnʹ избегают наложения коммутации, которое может приводить к событиям перенапряжения.
В еще одном варианте осуществления, если системой 70 предотвращения наложения коммутации определено, что конкретное наложение 84 коммутации не несет риска события перенапряжения, наложение 84 коммутации может игнорироваться (например, смотрите наложение 84a коммутации, связанное с поддержанием неизменными сигналов P1ʹ и Pnʹ коммутации). Например, если напряжение шины постоянного тока является достаточно низким, даже когда учтены наложенные выбросы напряжения, событие наложения коммутации может игнорироваться, так как нет опасения получить перенапряжение, выходящее за пределы максимально допустимого напряжения силового устройства в таком случае. Еще один неограничивающий случай, в котором наложение 84 коммутации может игнорироваться бывает в тех случаях, когда перекрытие возникает между событием коммутации, которое заканчивается, и событием коммутации, которое начинается. В еще одном другом варианте осуществления, любая комбинация осуществления опережения, задерживание или сохранения расположения фронтов 82 импульсов может использоваться для перестройки сигналов с P1 по Pn коммутации.
Фиг. 5 и 6 с непрерывной ссылкой на фиг. 1-4, описывают подробнее способ управления системой 60 электропитания с использованием системы 70 предотвращения перекрытия коммутации, описанной выше. Прежде всего со ссылкой на фиг.5, главный генератор 74 тактовых импульсов создает поток импульсов 88 (график (a) по фиг. 5) и приводит в действие счетчик Cm(график (b) по фиг. 5), который может быть частью блока 76 ШИМ. Счетчик Cm дает положительное приращение каждый такт Tc главного генератора 74 тактовых импульсов, чтобы обеспечивать привязку ко времени для системы 70 предотвращения наложения коммутации. Другими словами, счетчик Cm считает поток импульсов 88, сформированных главным генератором 74 тактовых импульсов.
В одном из вариантов осуществления, предполагается, что блок 76 ШИМ вырабатывает сигнал выровненной по центру асимметричной модуляции (коммутации). Однако другие реализации ШИМ также предполагаются в пределах объема этого изобретения.
Фиг. 5(c) иллюстрирует, каким образом импульс коммутации ШИМ для конкретного плеча (то есть одного из плеч 66a, 66b, 66c, 66d, 66e, 66f и 66g по фиг. 2) формируется в блоке 76 ШИМ на фиг. 3. Каждая процедура инициируется на каждом пике или впадине треугольной несущей ШИМ на основании предположения схемы выровненной по центру асимметричной ШИМ. Несущая ШИМ формируется реверсивным счетчиком, который является частью блока 76 ШИМ, ведомого главным генератором 74 тактовых импульсов. Специфичный полуцикл несущей применяется в одном из вариантов осуществления и задан в качестве R1 на фиг. 5(c). В начале полуцикла несущей обновляется относительная длительность включения (или, равносильно, сигнал модуляции ШИМ). Значение относительной длительности включения является результатом тока, крутящего момента или заданной стратегии управления. Сигнал модуляции ШИМ сравнивается с несущей ШИМ, и момент коммутации определяется для этого конкретного полуцикла несущей. Эта процедура повторяется цикл за циклом и последовательность импульсов ШИМ формируется, как показано на фиг. 5(d). Этот импульс определяется в качестве одного из P1, P2,…, Pn на фиг. 2 и фиг. 3.
Такая же процедура применяется ко всем плечам 66 системы 60 электропитания по фиг. 2. В одном из вариантов осуществления, SODB 78 рассчитывает следующий предстоящий момент коммутации на основании обновленного значения относительной длительности включения и периода полуцикла несущей, как изложено ниже:
TC1=D1*Tp1 , (1)
где Tp1=n*Tc,
n - целочисленное значение количества циклов, соответствующих полуциклу несущей ШИМ, и
Tc - период главного генератора тактовых импульсов.
В еще одном варианте осуществления, SODB 78 может рассчитывать следующий момент коммутации, опираясь на соответствующее значение TC1 счетчика главного генератора 74 тактовых импульсов. SODB 78 сравнивает моменты коммутации на основании временной развертки, обеспечиваемой счетчиком Cm главного генератора 74 тактовых импульсов, и выявляет вероятность наложения коммутации между двумя или более многочисленных плеч 66.
Если выявлено наложение коммутации, процедура R1 может вызывать процедуру изменения положения фронтов импульсов для перестройки одного или более сигналов коммутации. Эта процедура выполняется в SPERB 80.
SPERB 80 может функционировать для изменения положения одного или более фронтов импульсов конфликтующих сигналов коммутации, тем временем, пытаясь предохранять форму сигнала от сигналов коммутации. Фронт(ы) импульса может(гут) подвергаться опережению или запаздыванию в зависимости от общего влияния, которое такие изменения могут оказывать на форму сигналов коммутации. В качестве альтернативы, наложение фронтов импульсов могло бы игнорироваться в тех случаях, когда контроллером 72 определено, что коммутационное устройство 62 не подвергается опасности события перенапряжения. Отмечено, что события перенапряжения обычно не возникают при низких токах нагрузки или низких напряжениях шины постоянного тока.
В одном из вариантов осуществления, проиллюстрированном на фиг. 6, SPERB 80 использует систему 100 приоритетов, чтобы выбирать, какой сигнал(ы) коммутации должен быть перестроен. Значение с PPR1 по PPRn приоритета может назначаться каждому сигналу с P1 по Pn коммутации. В одном из вариантов осуществления, значение PPR1 приоритета наделено наивысшим приоритетом, тогда как каждое последующее значение с PPR2 по PPRn приоритета наделено более низким приоритетом, чем предыдущее значение приоритета. Сигналы P коммутации с низшим приоритетом, такие как сигнал Pn в этом примере, наиболее вероятно должны подвергаться изменению положения, тогда как сигналы с наивысшим приоритетом (например, P1 в этом примере) будут неизменными. Приоритет сигналов может рассчитываться и назначаться, чтобы добиваться меньшей величины искажения у формы сигнала выходного тока сигналов с P1 по Pn коммутации. SPERB 80 мог бы быть запрограммирован, чтобы сохранять, динамически оценивать/рассчитывать или иным образом осуществлять доступ к системе 100 приоритетов для использования при перестраивании сигналов с P1 по Pn коммутации в ответ на наложение коммутации.
В одном из вариантов осуществления, следующая информация может использоваться для расчета и назначения значений с PPR1 по PPRn приоритетов:
1) показания датчика тока
2) сведения о стратегии модуляции
3) геометрия электрической шины
4) характеристики распространения канала
Конечно, другая информация также может использоваться для установления системы 100 приоритетов.
Хотя разные неограничивающие варианты осуществления проиллюстрированы в качестве имеющих специфичные компоненты или этапы, варианты осуществления этого изобретения не ограничены такими конкретными вариантами осуществления. Можно использовать некоторые из компонентов или признаков из любого из неограничивающих вариантов осуществления в комбинации с признаками или компонентами из любого из других неограничивающих вариантов осуществления.
Следует понимать, что одинаковые ссылочные позиции указывают соответствующие или подобные элементы на разных чертежах. Следует понимать, что хотя конкретная компоновка компонентов раскрыта и проиллюстрирована в этих примерных вариантах осуществления, другие компоновки также могли бы извлекать пользу из сущности настоящего изобретения.
Вышеизложенное описание следует понимать в качестве иллюстративного, а не в сколько-нибудь ограничивающем смысле. Рядовому специалисту в данной области техники следует понимать, что определенные модификации могли бы подпадать под объем настоящего изобретения. По этим причинам следующая формула изобретения должна рассматриваться для определения истинного объема и содержания настоящего изобретения.
Реферат
Изобретение относится к электрифицированному транспортному средству. Техническим результатом является предотвращение наложения коммутации для предотвращения событий перенапряжения на одном или более коммутационных устройств системы электропитания. Результат достигается тем, что этап управления основан на информации о наложении коммутации, которая включает в себя команды для осуществления опережения или запаздывания сигнала коммутации, связанного с по меньшей мере одним из коммутационных устройств. 12 з.п. ф-лы, 10 ил.
Комментарии