Устройство управления и способ управления - RU2682664C1
Код документа: RU2682664C1
Чертежи







Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству управления и способу управления для управления мощностью переменного тока, подаваемой на электрическую нагрузку.
УРОВЕНЬ ТЕХНИКИ
[0002] В качестве устройства управления для управления электрической нагрузкой, например двигателем, известно устройство, которое осуществляет аналого-цифровое (А/Ц) преобразование для переменного тока двигателя в момент времени, когда несущий сигнал, используемый для управления широтно-импульсной модуляцией (ШИМ), находится на пике и впадине, и вычисляет значение команды заполнения на основании преобразованных данных тока.
[0003] В таком устройстве управления, чтобы пара полупроводниковых приборов, находящихся в одной фазе, одновременно не включалась при генерации сигнала ШИМ в ответ на значение команды заполнения, в сигнале ШИМ обеспечивается время задержки, именуемое ʺмертвым временемʺ. Кроме того, центральный момент времени периода включения сигнала ШИМ, снабженного мертвым временем, отклоняется от тайминга А/Ц преобразования, выполняемого на пике и во впадине несущего сигнала, и ошибка дискретизации вносится как шум в данные тока, подвергнутые А/Ц преобразованию.
[0004] В связи с этим, в JP2007-159185A рассмотрена методика согласования тайминга А/Ц преобразования с центральным моментом времени периода включения сигнала ШИМ путем сдвига тайминга А/Ц преобразования на половину заранее определенного мертвого времени от пика или впадины несущего сигнала.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Однако, согласно вышеупомянутой методике, тайминг А/Ц преобразования равномерно сдвигается на заранее определенное время независимо от коэффициента заполнения сигнала ШИМ. Поэтому тайминг А/Ц преобразования и центральный момент времени периода включения сигнала ШИМ в ряде случаев могут отличаться друг от друга.
[0006] Например, в устройстве управления, где мертвое время сокращается с увеличением коэффициента заполнения вблизи коэффициента заполнения 100%, тайминг А/Ц преобразования равномерно сдвигается несмотря на то, что период мертвого времени изменяется в зависимости от коэффициента заполнения. В этой конфигурации, когда коэффициент заполнения равен 100%, мертвое время в сигнале ШИМ не обеспечено. Поэтому, в частности, отклонение между таймингом А/Ц преобразования и центральным моментом времени периода включения сигнала ШИМ увеличивается. В результате, дискретизированные данные тока имеют форму волны, в которой синусоидальная волна сколлапсирована. Поэтому в данные тока примешивается гармоническая шумовая составляющая.
[0007] Таким образом, если тайминг А/Ц преобразования равномерно сдвигается на половину мертвого времени, генерируется отклонение между таймингом А/Ц преобразования и центральным моментом времени периода включения сигнала ШИМ, из-за чего, в ряде случаев в сигнал обнаружения переменного тока может примешиваться шум дискретизации.
[0008] Таким образом, ввиду вышеупомянутых проблем, задачей настоящего изобретения является обеспечение устройства управления и способа управления, позволяющих противодействовать снижению точности обнаружения переменного тока, подаваемого на электрическую нагрузку.
[0009] Устройство управления для управления электрическим блоком, возбуждаемым мощностью переменного тока, причем устройство управления содержит пару переключающих элементов, выполненных с возможностью преобразования мощности от источника питания в мощность переменного тока и подачи мощности переменного тока на электрический блок. Устройство управления содержит блок преобразования, выполненный с возможностью получения сигнала тока или напряжения, подаваемого на электрический блок, и преобразования сигнала из аналогового формата в цифровой формат. Устройство управления дополнительно содержит блок вычисления, выполненный с возможностью вычисления значения команды заполнения для осуществления управления широтно-импульсной модуляцией (ШИМ) для электрического блока на основании сигнала, преобразованного блоком преобразования; блок генерирования, выполненный с возможностью генерирования сигнала ШИМ на основании значения команды заполнения, вычисленного блоком вычисления, и несущего сигнала для осуществления управления ШИМ, и блок управления, выполненный с возможностью управления мощностью переменного тока, подаваемой на электрический блок путем переключения состояния соединения переключающего элемента на основании сигнала ШИМ, генерируемого блоком генерирования. Устройство управления содержит блок определения, выполненный с возможностью определения, увеличивается ли несущий сигнал или уменьшается; и блок коррекции, выполненный с возможностью регулировки момента времени переключения переключающего элемента путем корректировки значения команды заполнения, вычисленного блоком вычисления, на основании определения, увеличивается ли несущий сигнал или уменьшается, произведенного блоком определения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] Фиг. 1 - схема, демонстрирующая примерную конфигурацию устройства управления для управления устройством электрического двигателя согласно первому варианту осуществления изобретения;
фиг. 2 - временная диаграмма, демонстрирующая соотношение между таймингом А/Ц преобразования и несущим сигналом в устройстве управления;
фиг. 3 - блок-схема, демонстрирующая примерную конфигурацию преобразователя ШИМ согласно варианту осуществления изобретения;
фиг. 4 - временная диаграмма, демонстрирующая примерный способ генерирования напряжения ШИМ на основании значения команды заполнения;
фиг. 5 - блок-схема операций, демонстрирующая примерную последовательность обработки способа управления для управления двигателем согласно варианту осуществления изобретения;
фиг. 6 - временная диаграмма, демонстрирующая способ корректировки значения команды заполнения согласно второму варианту осуществления изобретения;
фиг. 7 - блок-схема операций, демонстрирующая примерную последовательность обработки способа управления согласно варианту осуществления изобретения;
фиг. 8 - временная диаграмма, демонстрирующая способ корректировки значения команды заполнения согласно третьему варианту осуществления изобретения;
фиг. 9 - блок-схема операций, демонстрирующая примерную последовательность обработки способа управления согласно варианту осуществления изобретения;
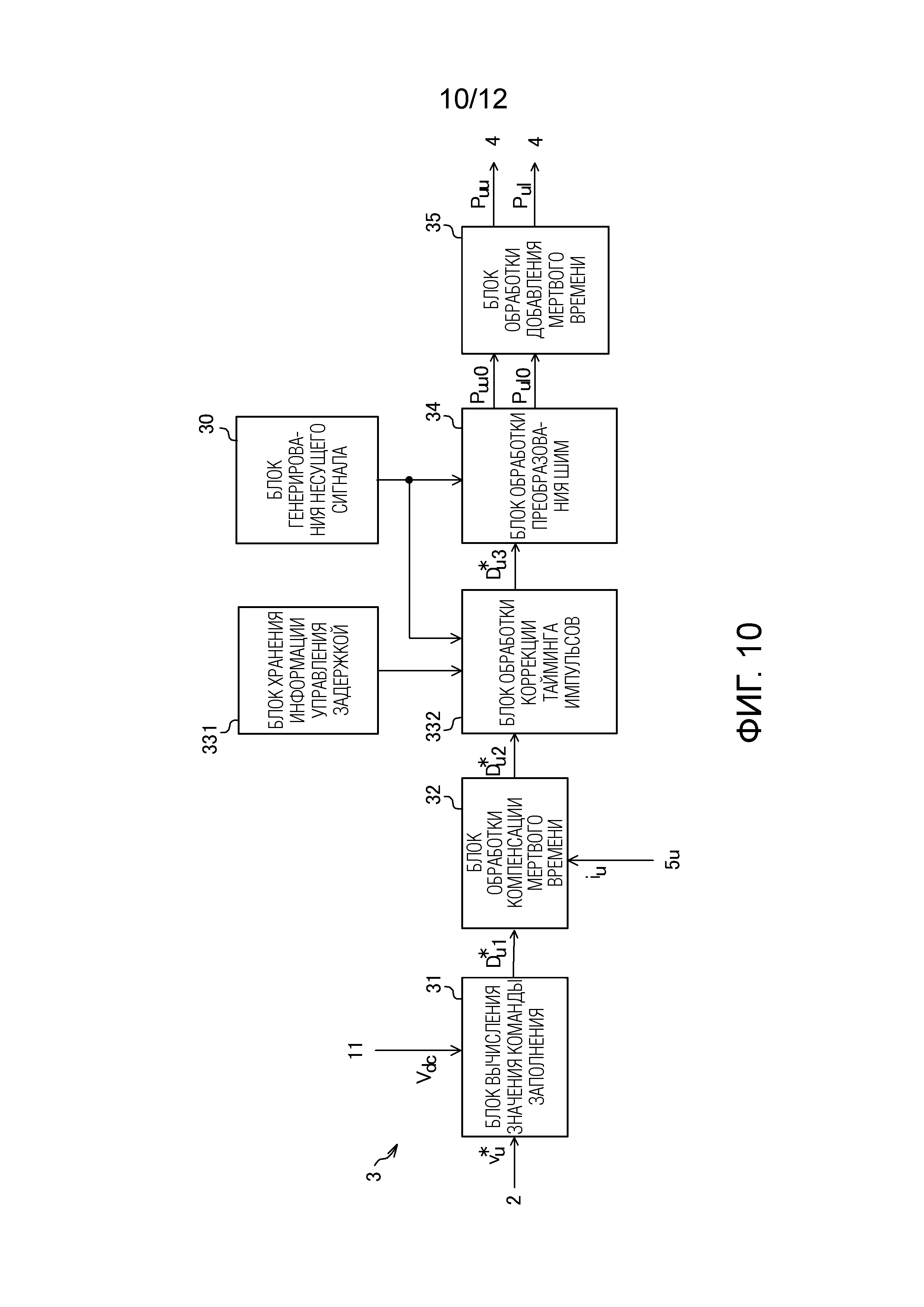
фиг. 10 - блок-схема, демонстрирующая примерную конфигурацию преобразователя ШИМ согласно третьему варианту осуществления изобретения;
фиг. 11 - временная диаграмма, демонстрирующая способ корректировки значения команды заполнения согласно варианту осуществления изобретения; и
фиг. 12 - блок-схема операций, демонстрирующая примерную последовательность обработки способа управления согласно варианту осуществления изобретения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0011] Варианты осуществления настоящего изобретения будет описано ниже со ссылкой на прилагаемые чертежи.
Первый вариант осуществления
[0012] На фиг. 1 показана схема, демонстрирующая примерную конфигурацию устройства управления согласно первому варианту осуществления изобретения.
[0013] Устройство 100 управления представляет собой устройство управления двигателя для возбуждения двигателя 6. Устройство 100 управления устанавливается, например, на гибридном автомобиле, электромобиле и т.п. Согласно этому варианту осуществления, устройство 100 управления выполняет векторное управление для управления мощностью переменного тока, подаваемой на двигатель 6.
[0014] Устройство 100 управления включает в себя блок 1 управления крутящим моментом двигателя, преобразователь 2 оси dq/uvw-фазы, преобразователь 3 широтно-импульсной модуляции (ШИМ), инвертор (инв.) 4 и детекторы 5u и 5v тока. Устройство 100 управления включает в себя детектор 7 положения ротора, вычислитель 8 скорости вращения двигателя, преобразователь 9 uvw-фазы/оси dq, батарею 10 и детектор 11 напряжения батареи.
[0015] Двигатель 6 представляет собой электрический блок, возбуждаемый мощностью переменного тока. В качестве двигателя 6 используется электрическая нагрузка, например, тяговый двигатель или двигатель рулевого привода. Двигатель 6 представляет собой многофазный двигатель переменного тока, возбуждаемый трехфазными переменными токами, включающими в себя токи U-фазы, V-фазы и W-фазы в этом варианте осуществления. Двигатель 6 снабжен детектором 7 положения ротора.
[0016] Детектор 7 положения ротора обнаруживает положение ротора двигателя 6 в заранее определенном цикле. Детектор 7 положения ротора представляет собой, например, круговой датчик положения. Детектор 7 положения ротора выводит сигнал обнаружения, представляющий электрический угол θ ротора, на преобразователь 2 оси dq/uvw-фазы, вычислитель 8 скорости вращения двигателя и преобразователь 9 uvw-фазы/оси dq на основании результата обнаружения.
[0017] Вычислитель 8 скорости вращения двигателя снабжен блоком преобразования, который получает сигнал обнаружения от детектора 7 положения ротора, осуществляет А/Ц преобразование для сигнала обнаружения из аналогового формата в цифровой формат, и выводит обнаруженное значение θ электрического угла. Вычислитель 8 скорости вращения двигателя вычисляет разность между текущим обнаруженным значением θ электрического угла и предыдущим обнаруженным значением электрического угла, то есть величину изменения обнаруженного значения электрического угла за единицу времени, на основании обнаруженного значения θ электрического угла, подвергнутого А/Ц преобразованию. Вычислитель 8 скорости вращения двигателя вычисляет скорость N вращения двигателя 6 из величины изменения обнаруженного значения электрического угла и выводит скорость N вращения на блок 1 управления крутящим моментом двигателя.
[0018] Батарея 10 представляет собой источник питания для подачи мощности на двигатель 6 через инвертор 4. Батарея 10 выводит мощность постоянного тока на инвертор 4. Батарея 10 представляет собой, например, литий-ионная батарея.
[0019] Детектор 11 напряжения батареи обнаруживает напряжение батареи 10. Детектор 11 напряжения батареи выводит обнаруженное значение Vdc напряжения батареи,представляющее обнаруженное напряжение на блок 1 управления крутящим моментом двигателя.
[0020] Блок 1 управления крутящим моментом двигателя получает от контроллера (не показан) значение команды T* крутящего момента, которое определяет движущую силу двигателя 6. Контроллер (не показан) вычисляет значение команды T* крутящего момента в зависимости от действий водителя. Например, с увеличением уровня нажатия педали акселератора автомобиля, значение команды T* крутящего момента, выводимое на блок 1 управления крутящим моментом двигателя, увеличивается.
[0021] Блок 1 управления крутящим моментом двигателя вычисляет значение команды vd* напряжения по оси d и значение команды vq* напряжения по оси q на основании значения команды T* крутящего момента. Обнаруженное значение id тока по оси d и обнаруженное значение iq тока по оси q получаются путем преобразования обнаруженных значений трехфазных переменных токов, подаваемых на двигатель 6, в координаты осей dq.
[0022] Согласно этому варианту осуществления, блок 1 управления крутящим моментом двигателя вычисляет значение команды тока по оси d и значение команды тока по оси q на основании значения команды T* крутящего момента, обнаруженное значение Vdc напряжения батареи, обнаруженное значение id тока по оси d и обнаруженное значение iq тока по оси q. Блок 1 управления крутящим моментом двигателя вычисляет значение команды vd* напряжения по оси d и значение команды vq* напряжения по оси q путем выполнения операции векторного управления током на основании вычисленного значения команды тока по оси d и вычисленного значения команды тока по оси q. Блок 1 управления крутящим моментом двигателя выводит вычисленное значение команды vd* напряжения по оси d и вычисленное значение команды vq* напряжения по оси q на преобразователь 2 оси dq/uvw-фазы.
[0023] Преобразователь 2 оси dq/uvw-фазы преобразует значение команды vd* напряжения по оси d и значение команды vq* напряжения по оси q в трехфазное значение команды напряжения, включающее в себя значение команды vu* напряжения U-фазы, значение команды vv* напряжения V-фазы и значение команды vw* напряжения W-фазы с использованием следующего уравнения (1) на основании обнаруженного значения θ электрического угла от детектора 7 положения ротора.
[0024]
Уравнение 1
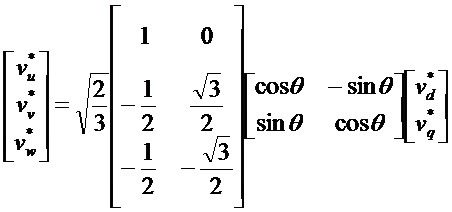
[0025] Преобразователь 2 оси dq/uvw-фазы выводит значения команды vu*, vv* и vw* трехфазного напряжения на преобразователь 3 ШИМ.
[0026] Преобразователь 3 ШИМ управляет мощностью переменного тока, подаваемой на каждую фазу двигателя 6 от инвертора 4 путем выполнения широтно-импульсной модуляции (ШИМ) на основании значений команды vu*, vv* и vw* трехфазного напряжения. Таким образом, преобразователь 3 ШИМ осуществляет управление ШИМ для мощности, подаваемой на каждую фазу двигателя 6 от батареи 10.
[0027] Согласно этому варианту осуществления, преобразователь 3 ШИМ генерирует каждый сигнал ШИМ для возбуждения каждого из пары переключающих элементов, обеспеченных для каждой фазы двигателя 6 на основании значений команды vu*, vv* и vw* трехфазного напряжения и обнаруженного значения Vdc напряжения батареи.
[0028] Кроме того, преобразователь 3 ШИМ добавляет мертвое время к каждому сигналу ШИМ, подаваемому на каждый из пары переключающих элементов, чтобы пара переключающих элементов не могла проводить одновременно. Преобразователь 3 ШИМ выводит сигнал ШИМ, полученный путем добавления мертвого времени, на инвертор 4 в качестве сигнала возбуждения переключающего элемента.
[0029] Например, преобразователь 3 ШИМ вычисляет значение команды заполнения для определения ширины импульса напряжения, подаваемого на U-фазу на основании значения команды vu* напряжения U-фазы и обнаруженного значения Vdc напряжения батареи. Преобразователь 3 ШИМ генерирует каждый сигнал ШИМ для пары переключающих элементов, соответствующих U-фазе, на основании вычисленного значения команды заполнения U-фазы и вычисленного несущего сигнала. Преобразователь 3 ШИМ выводит каждый сигнал Puu и Pul возбуждения, полученный путем добавления мертвого времени к каждому импульсу сигнала ШИМ, на управляющие выводы пары переключающих элементов.
[0030] Преобразователь 3 ШИМ выводит сигналы Puu и Pul возбуждения на каждый управляющий вывод пары переключающих элементов, соответствующих U-фазе, и выводит сигналы Pvu и Pvl возбуждения на каждый управляющий вывод пары переключающих элементов, соответствующих V-фазе. Кроме того, преобразователь 3 ШИМ выводит сигналы Pwu и Pwl возбуждения на каждый управляющий вывод пары переключающих элементов, соответствующих W-фазе двигателя 6.
[0031] Инвертор 4 управляет мощностью переменного тока, подаваемой на каждую фазу двигателя 6 путем переключения состояния соединения (включено/выключено) пары переключающих элементов каждой фазы на основании сигналов Puu, Pul, Pvu, Pvl, Pwu и Pwl возбуждения, генерируемых преобразователем 3 ШИМ.
[0032] Инвертор 4 имеет пару переключающих элементов, параллельно соединенных с батареей 10 для каждой фазы двигателя 6. Пара переключающих элементов образует схему переключения, в которой два полупроводниковых прибора соединены последовательно. В нижеследующем описании переключающий элемент, подключенный между положительным выводом батареи 10 и выводом питания двигателя 6, будет именоваться ʺпереключающим элементом верхнего каскадаʺ, и переключающий элемент, подключенный между выводом питания двигателя 6 и отрицательным выводом батареи 10, будет именоваться ʺпереключающим элементом нижнего каскадаʺ.
[0033] Переключающий элемент верхнего каскада подает электрический потенциал +Vdc/2, генерируемый на положительном выводе батареи 10 в проводящем состоянии (включено) и останавливает подачу электрического потенциала в непроводящем состоянии (отключенный). При этом переключающий элемент нижнего каскада подает электрический потенциал -Vdc/2, генерируемый на отрицательном выводе батареи 10, на двигатель 6 в проводящем состоянии и останавливает подачу электрического потенциала на двигатель 6 в непроводящем состоянии.
[0034] В качестве переключающего элемента, например, используется мощный элемент, например, полевой транзистор (FET). Переключающий элемент может включаться или отключаться в ответ на импульс, подаваемый на его управляющий вывод (например, вывод затвора).
[0035] Инвертор 4 преобразует напряжение Vdc постоянного тока батареи 10 в трехфазные напряжения vu, vv и vw ШИМ на основании сигналов Puu, Pul, Pvu, Pvl, Pwu и Pwl возбуждения, подаваемых на каждый переключающий элемент от преобразователя 3 ШИМ. Инвертор 4 подает напряжение vu ШИМ U-фазы на обмотку U-фазы двигателя 6, подает напряжение vv ШИМ V-фазы на обмотку V-фазы и подает напряжение vw ШИМ W-фазы на обмотку W-фазы. В результате, переменные токи iu, iv и iw текут в обмотки каждой фазы двигателя 6.
[0036] Таким образом, инвертор 4 преобразует напряжение постоянного тока от батареи 10 в трехфазное псевдосинусоидальное напряжение и подает его на двигатель 6. Таким образом, инвертор 4 преобразует мощность постоянного тока от источника питания в мощность переменного тока и подает мощность переменного тока на устройство электрического двигателя.
[0037] Детекторы 5u и 5v тока обнаруживают ток iu U-фазы и ток iv V-фазы, соответственно, подаваемые на двигатель 6. Детектор 5u тока подключен к линии питания U-фазы которая соединяет инвертор 4 и обмотку U-фазы двигателя 6, и подключен к линии питания V-фазы, которая соединяет инвертор 4 и обмотку V-фазы двигателя 6. Детекторы 5u и 5v тока выводят сигналы обнаружения, полученные обнаружением тока iu U-фазы и тока iv V-фазы, на преобразователь 3 ШИМ и преобразователь 9 uvw-фазы/оси dq, соответственно.
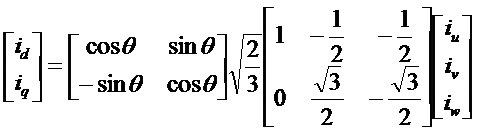
[0038] Преобразователь 9 uvw-фазы/оси dq имеет блок преобразования, который получает сигналы обнаружения тока iu U-фазы и тока iv V-фазы, выводимых из детекторов 5u и 5v тока, и осуществляет А/Ц преобразование для каждого сигнала обнаружения из аналогового формата в цифровой формат. Кроме того, преобразователь 9 uvw-фазы/оси dq вычисляет ток iw W-фазы на основании тока iu U-фазы и тока iv V-фазы, подвергнутых А/Ц преобразованию, с использованием соотношения следующего уравнения (2).
[0039]
Уравнение 2

[0040] Преобразователь 9 uvw-фазы/оси dq преобразует трехфазные токи iu, iv и iw, текущие в двигатель 6, в обнаруженное значение id тока по оси d и обнаруженное значение iq тока по оси qна основании обнаруженного значения θ электрического угла от детектора 7 положения ротора с использованием следующего уравнения (3).
[0041]
Уравнение 3
[0042] Преобразователь 9 uvw-фазы/оси dq выводит обнаруженное значение id тока по оси d и обнаруженное значение iq тока по оси q на блок 1 управления крутящим моментом двигателя. Блок 1 управления крутящим моментом двигателя возвращает обнаруженное значение id тока по оси d и обнаруженное значение iq тока по оси q в значение команды vd* напряжения по оси d и значение команды vq* напряжения по оси q для управления мощностью переменного тока, подаваемой на двигатель 6.
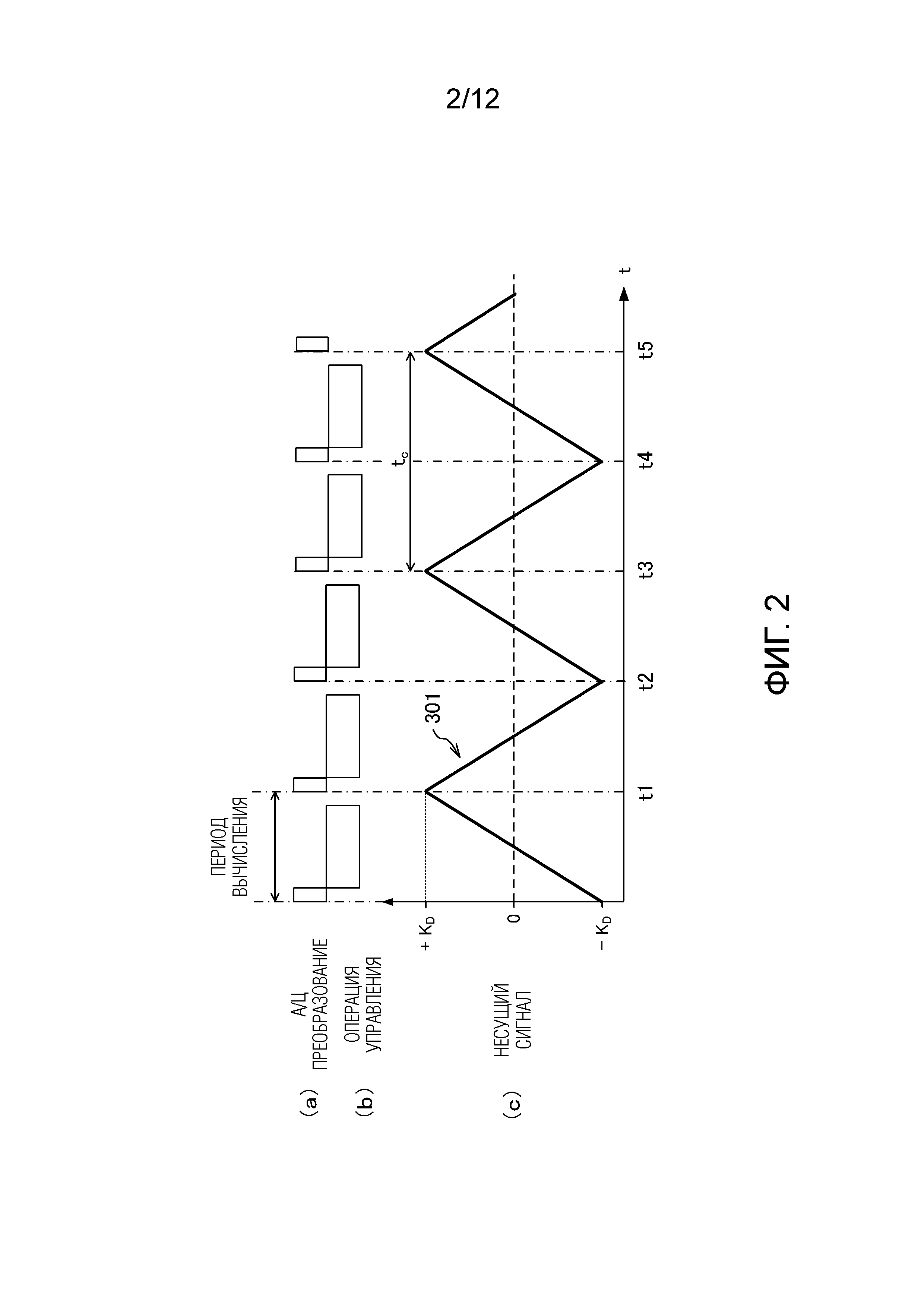
[0043] На фиг. 2 показана временная диаграмма, демонстрирующая соотношение между моментами времени А/Ц преобразования, осуществляемого преобразователем 2 оси dq/uvw-фазы, вычислителем 8 скорости вращения двигателя и преобразователем 9 uvw-фазы/оси dq, и несущими сигналами, генерируемыми на преобразователе 3 ШИМ.
[0044] На фиг. 2(a) показана диаграмма, демонстрирующая тайминг А/Ц преобразования, и на фиг. 2(b) показана диаграмма, демонстрирующая тайминг операции управления, осуществляемой блоком 1 управления крутящим моментом двигателя и преобразователем 3 ШИМ. На фиг. 2(c) показана диаграмма, демонстрирующая форму волны несущего сигнала 301, генерируемого преобразователем 3 ШИМ. Заметим, что все фиг. 2(a)-2(c) имеют общую ось абсцисс в качестве оси времени.
[0045] Как показано на фиг. 2(c), преобразователь 3 ШИМ генерирует треугольную волну в качестве несущего сигнала 301 для генерирования сигнала ШИМ. Амплитуда KD и цикл tc треугольной волны надлежащим образом задаются в зависимости от конструкции устройства 100 управления и т.п.
[0046] Как показано на фиг. 2(a) и 2(b), А/Ц преобразование осуществляется в моменты времени t1-t5, когда треугольная волна имеет пик и впадину. Таким образом, А/Ц преобразование осуществляется в каждой половине цикла tc треугольной волны (периода работы). По завершении А/Ц преобразования, операция управления для управления двигателем 6 выполняется на основании обнаруженных значений и значений команды, полученных посредством А/Ц преобразования.
[0047] Таким образом, поскольку значение тока двигателя 6 дискретизируется на пиках и впадинах треугольной волны, центральный момент времени импульса напряжения ШИМ задерживается относительно тайминга А/Ц преобразования, если преобразователь 3 ШИМ добавляет мертвое время к сигналу ШИМ.
[0048] Если тайминг А/Ц преобразования и центральные моменты времени периодов включения и отключения напряжения ШИМ отклоняются, данные тока, подвергнутые А/Ц преобразованию, представляют сколлапсированную синусоидальную форму волны. Таким образом, данные тока, подвергнутые А/Ц преобразованию, содержат гармоническую составляющую в качестве шума. Поэтому точность обнаружения переменного тока, подаваемого на двигатель 6, снижается.
[0049] В связи с этим, согласно этому варианту осуществления, для противодействия задержке импульсов сигнала ШИМ, преобразователь 3 ШИМ корректирует значение команды заполнения в зависимости от увеличения или уменьшения несущего сигнала.
[0050] На фиг. 3 показана блок-схема, демонстрирующая примерную конфигурацию преобразователя 3 ШИМ согласно этому варианту осуществления. На фиг. 3 проиллюстрирована конфигурация для генерирования сигналов Puu и Pul возбуждения пары переключающих элементов, соответствующих U-фазе.
[0051] Преобразователь 3 ШИМ включает в себя блок 30 генерирования несущего сигнала, блок 31 вычисления значения команды заполнения, блок 32 обработки компенсации мертвого времени, блок 33 обработки коррекции тайминга импульсов, блок 34 обработки преобразования ШИМ и блок 35 обработки добавления мертвого времени.
[0052] Блок 30 генерирования несущего сигнала генерирует несущий сигнал для осуществления управления ШИМ для мощности, подаваемой на двигатель 6. Согласно этому варианту осуществления, блок 30 генерирования несущего сигнала генерирует треугольную волну в качестве несущего сигнала, как показано на фиг. 2(c). Например, блок 30 генерирования несущего сигнала имеет счетчик для генерирования треугольной волны путем увеличения или уменьшения значения счетчика с течением времени. Блок 30 генерирования несущего сигнала выводит генерируемую треугольнику волну на блок 33 обработки коррекции тайминга импульсов и блок 34 обработки преобразования ШИМ.
[0053] Блок 31 вычисления значения команды заполнения вычисляет значение команды Du1* заполнения U-фазы для осуществления управления ШИМ для мощности, подаваемой на U-фазу двигателя 6 на основании значения команды vu* напряжения U-фазы от преобразователя 2 оси dq/uvw-фазы и обнаруженного значения Vdc напряжения батареиот детектора 11 напряжения батареи.
[0054] Согласно этому варианту осуществления, блок 31 вычисления значения команды заполнения вычисляет значение команды Du1* заполнения U-фазы с использованием амплитуды KD треугольной волны, генерируемой от блока 30 генерирования несущего сигнала на основании следующего уравнения (4). Амплитуда KD треугольной волны заранее хранится на блоке 31 вычисления значения команды заполнения.
[0055]
Уравнение 4
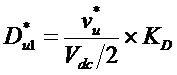
[0056] Как выражено в уравнении (4), блок 31 вычисления значения команды заполнения увеличивает значение команды Du1* заполнения U-фазы с увеличением значения команды vu* напряжения U-фазы. Кроме того, блок 31 вычисления значения команды заполнения увеличивает значение команды Du1* заполнения U-фазы с уменьшением обнаруженного значения Vdc напряжения батареи. Блок 31 вычисления значения команды заполнения выводит вычисленное значение команды Du1* заполнения U-фазы на блок 32 обработки компенсации мертвого времени.
[0057] Блок 32 обработки компенсации мертвого времени осуществляет обработку компенсации мертвого времени для значения команды Du1* заполнения U-фазы для компенсации отклонения ширины импульса напряжения vu ШИМ U-фазы, обусловленного добавлением мертвого времени tdt к сигналу ШИМ. Мертвое время tdt представляет собой постоянное время задержки, обеспеченное в паре сигналов ШИМ во избежание одновременного включения пары переключающих элементов. К мертвому времени tdt может добавляться время задержки, фактически от генерации сигнала ШИМ до подачи сигнала ШИМ на двигатель 6.
[0058] Блок 32 обработки компенсации мертвого времени корректирует значение команды Du1* заполнения U-фазы для компенсации отклонения ширины импульса напряжения vu ШИМ U-фазы в зависимости от полярности тока iu U-фазы.
[0059] Если ток iu U-фазы имеет положительное значение, то есть, если ток iu U-фазы течет от инвертора 4 на двигатель 6, блок 32 обработки компенсации мертвого времени корректирует значение команды Du1* заполнения U-фазы, благодаря чему, период отключения напряжения vu ШИМ U-фазы уменьшается. Используемый здесь термин "период отключения" означает период, в течение которого электрический потенциал отрицательного вывода батареи 10 подается на U-фазу двигателя 6.
[0060] При этом, если ток iu U-фазы имеет отрицательное значение, то есть, если ток iu U-фазы течет от двигателя 6 на инвертор 4, блок 32 обработки компенсации мертвого времени корректирует значение команды Du1* заполнения U-фазы, благодаря чему, период отключения напряжения vu ШИМ U-фазы увеличивается.
[0061] Согласно этому варианту осуществления, блок 32 обработки компенсации мертвого времени вычисляет значение команды Du2* заполнения, подвергнутое обработке компенсации, путем корректировки значения команды Du1* заполнения U-фазы на основании тока iu U-фазы с использованием следующего уравнения (5).
[0062]
Уравнение 5

[0063] На основании уравнения (5), блок 32 обработки компенсации мертвого времени вычисляет величину 2KDtdt/tc коррекции для корректировки значения команды Du1* заполнения U-фазы с использованием амплитуды KD треугольной волны, цикла tc и мертвого времени tdt, показанных на фиг. 2(c). Эта величина 2KDtdt/tc коррекции представляет собой значение, полученное путем преобразования половины мертвого времени tdt из временной области в область значений счетчика треугольной волны.
[0064] Если ток iu U-фазы больше нуля (0), блок 32 обработки компенсации мертвого времени прибавляет вышеупомянутое значение коррекции к значению команды Du1* заполнения U-фазы для вывода значения команды Du2* заполнения, подвергнутого обработке компенсации. В противном случае, если ток iu U-фазы меньше нуля, блок 32 обработки компенсации мертвого времени вычитает вышеупомянутую величину коррекции из значения команды Du1* заполнения U-фазы для вывода значения команды Du2* заполнения, подвергнутого обработке компенсации.
[0065] Блок 33 обработки коррекции тайминга импульсов осуществляет обработку коррекции тайминга импульсов для корректировки отклонения тайминга импульсов напряжения vu ШИМ U-фазы, обусловленного добавлением мертвого времени к сигналу ШИМ, для значения команды Du2* заполнения, подвергнутого обработке компенсации.
[0066] Согласно этому варианту осуществления, блок 33 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения путем корректировки значения команды Du2* заполнения, подвергнутого обработке компенсации, в зависимости от увеличения или уменьшения несущего сигнала. Блок 33 обработки коррекции тайминга импульсов изменяет знак величины коррекции для корректировки значения команды Du2* заполнения, подвергнутого обработке компенсации, в зависимости от полярности величины изменения ΔC треугольной волны на основании следующего уравнения (6).
[0067]
Уравнение 6

[0068] Коэффициент 2KDtdt/tc, связанный со знаковой функцией sgn(ΔC) второго члена правой стороны уравнения (6) является величиной коррекции. Эта величина 2KDtdt/tc коррекции представляет собой значение, полученное путем преобразования половины мертвого времени tdt из временной области в область значений счетчика треугольной волны.
[0069] Величина изменения ΔC треугольной волны представляет собой разность между значениями счетчика двух треугольных волн, полученными в разные моменты времени в ходе первой операции управления. Согласно этому варианту осуществления, величина изменения ΔC треугольной волны вычисляется вычитанием значения C1, полученного из первой треугольной волны, из значения C2, полученного из второй треугольной волны, на основании следующего уравнения (7).
[0070]
Уравнение 7

[0071] Если величина изменения ΔC треугольной волны, вычисленная на основании уравнения (7), больше нуля, блок 33 обработки коррекции тайминга импульсов определяет, что треугольная волна находится в периоде увеличения. Если величина изменения ΔC треугольной волны меньше нуля, треугольная волна находится в периоде уменьшения.
[0072] Таким образом, блок 33 обработки коррекции тайминга импульсов определяет, увеличивается ли, или уменьшается треугольная волна, генерируемая блоком 30 генерирования несущего сигнала. Заметим, что, хотя блок 33 обработки коррекции тайминга импульсов получает значения счетчика двух треугольных волн в этом варианте осуществления, три или более значений счетчика треугольной волны можно получить в разные моменты времени, и увеличивается или уменьшается треугольная волна, можно определить на основании множества значений счетчика.
[0073] Если треугольная волна находится в периоде увеличения, блок 33 обработки коррекции тайминга импульсов прибавляет величину 2KDtdt/tc коррекции к значению команды Du2* заполнения, подвергнутому обработке компенсации, без перемены знака значения коррекции с положительного (+) на отрицательный (-).
[0074] При этом, если треугольная волна находится в периоде уменьшения, блок 33 обработки коррекции тайминга импульсов вычитает величину 2KDtdt/tc коррекции из значения команды Du2* заполнения, подвергнутого обработке компенсации. Таким образом, если треугольная волна находится в периоде уменьшения, блок 33 обработки коррекции тайминга импульсов меняет знак величины коррекции с положительного на отрицательный.
[0075] Таким образом, блок 33 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения, меняя знак величины коррекции для корректировки значения команды Du2* заполнения в периоде увеличения и периоде уменьшения треугольной волны. Блок 33 обработки коррекции тайминга импульсов выводит скорректированное значение команды Du3* заполнения на блок 34 обработки преобразования ШИМ.
[0076] Блок 34 обработки преобразования ШИМ генерирует сигналы Puu0 и Pul0 ШИМ для возбуждения пары переключающих элементов, соответствующих U-фазе, на основании скорректированного значения команды Du3* заполнения и треугольной волны, полученной от блока 30 генерирования несущего сигнала.
[0077] Согласно этому варианту осуществления, с получением скорректированного значения команды Du3* заполнения, блок 34 обработки преобразования ШИМ переключает треугольную волну с периода увеличения на период уменьшения или с периода уменьшения на период увеличения и затем сравнивает скорректированное значение команды Du3* заполнения с треугольной волной от блока 30 генерирования несущего сигнала.
[0078] Когда скорректированное значение команды Du3* заполнения меньше значения счетчика треугольной волны, блок 34 обработки преобразования ШИМ устанавливает сигнал Puu0 ШИМ на высокий (H) уровень для включения переключающего элемента верхнего каскада. При этом, когда скорректированное значение команды Du3* заполнения больше значения счетчика треугольной волны, блок 34 обработки преобразования ШИМ переводит сигнал Puu0 ШИМ с H-уровня на низкий (L) уровень для отключения переключающего элемента верхнего каскада.
[0079] Кроме того, когда скорректированное значение команды Du3* заполнения меньше значения счетчика треугольной волны, блок 34 обработки преобразования ШИМ устанавливает сигнал Pul0 ШИМ на L-уровень для отключения переключающего элемента нижнего каскада. При этом, когда скорректированное значение команды Du3* заполнения больше значения счетчика треугольной волны, блок 34 обработки преобразования ШИМ переводит сигнал Pul0 ШИМ с L-уровня на H-уровень для включения переключающего элемента нижнего каскада.
[0080] Блок 34 обработки преобразования ШИМ выводит сигналы Puu0 и Pul0 ШИМ, генерируемые в соответствии со скорректированным значением команды Du3* заполнения, на блок 35 обработки добавления мертвого времени.
[0081] Блок 35 обработки добавления мертвого времени подготавливает мертвое время tdt в сигнале ШИМ, чтобы пара переключающих элементов могла одновременно находиться в непроводящем состоянии (отключаться). Блок 35 обработки добавления мертвого времени генерирует сигналы Puu и Pul возбуждения для пары переключающих элементов, соответствующих U-фазе путем добавления мертвого времени tdt к каждому импульсу сигналов Puu0 и Pul0 ШИМ от блока 34 обработки преобразования ШИМ.
[0082] Согласно этому варианту осуществления, когда сигнал Puu0 ШИМ принимается от блока 34 обработки преобразования ШИМ, блок 35 обработки добавления мертвого времени генерирует сигнал Puu возбуждения для переключающего элемента верхнего каскада, задерживая момент времени роста сигнала Puu0 ШИМ на мертвое время tdt.
[0083] Когда сигнал Pul0 ШИМ принимается от блока 34 обработки преобразования ШИМ, блок 35 обработки добавления мертвого времени генерирует сигнал Pul возбуждения для переключающего элемента нижнего каскада, задерживая момент времени роста сигнала Pul0 ШИМ на мертвое время tdt.
[0084] Блок 35 обработки добавления мертвого времени выводит сигналы Puu и Pul возбуждения на управляющие выводы пары переключающих элементов, соответствующих U-фазе.
[0085] Заметим, что, хотя на фиг. 3 показана конфигурация для генерирования сигналов Puu и Pul возбуждения на основании значения команды Du1* заполнения U-фазы, конфигурация для генерирования сигналов Pvu и Pvl возбуждения V-фазы и конфигурация для генерирования сигналов Pwu и Pwl возбуждения W-фазытакже аналогичны показанным на фиг. 2. По этой причине, конфигурации V-фазы и W-фазы преобразователя 3 ШИМ не будут описаны.
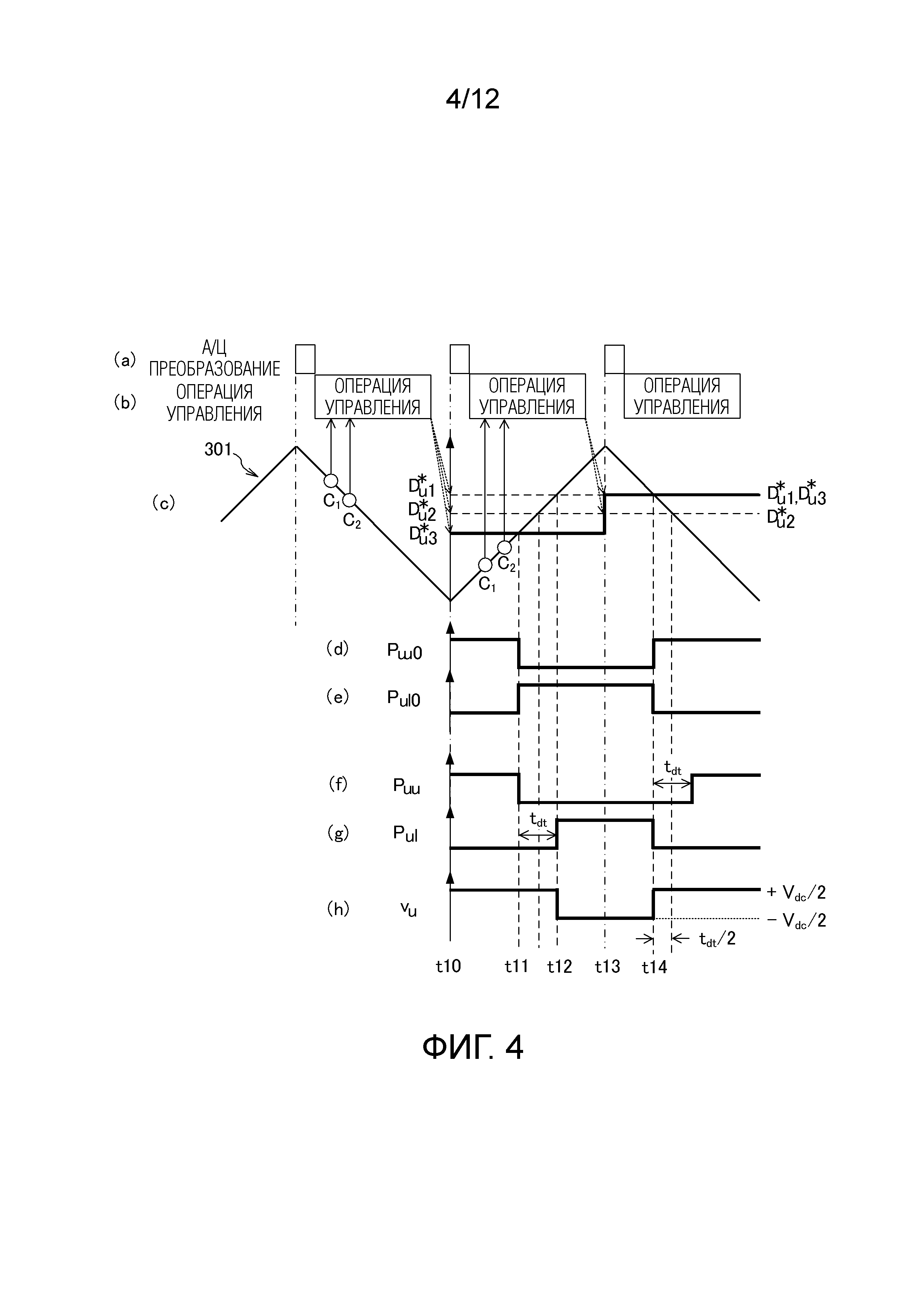
[0086] На фиг. 4 показана временная диаграмма, демонстрирующая пример напряжения vu ШИМ U-фазы, генерируемого на основании значения команды Du1* заполнения U-фазы, когда ток iu U-фазы имеет отрицательное значение.
[0087] На фиг. 4(a) показана диаграмма, демонстрирующая тайминг А/Ц преобразования, осуществляемой преобразователем 2 оси dq/uvw-фазы, вычислителем 8 скорости вращения двигателя и преобразователем 9 uvw-фазы/оси dq. На фиг. 4(b) показана диаграмма, демонстрирующая тайминг операции управления, осуществляемой блоком 1 управления крутящим моментом двигателя и преобразователем 3 ШИМ. На фиг. 4(c) показана диаграмма, демонстрирующая соотношение между значениями команды Du1*, Du2* и Du3* заполнения U-фазы и несущим сигналом 301.
[0088] На фиг. 4(d) и 4(e) показаны диаграммы, демонстрирующие импульсные формы волны сигналов Puu0 и Pul0 ШИМ, генерируемых блоком 34 обработки преобразования ШИМ. На фиг. 4(f) и 4(g) показаны диаграммы, демонстрирующие импульсные формы волны сигналов Puu и Pul возбуждения, генерируемых блоком 35 обработки добавления мертвого времени.
[0089] На фиг. 4(h) показана диаграмма, демонстрирующая импульсную форму волны напряжения vu ШИМ U-фазы, генерируемого инвертором 4 на основании сигналов Puu и Pul возбуждения. Заметим, что фиг. 4(a) - 4(h) имеют общую ось абсцисс в качестве оси времени.
[0090] Как показано на фиг. 4(b), значение команды Du1* заполнения U-фазы вычисляется в ходе операции управления до момента времени t10. При этом, поскольку ток iu U-фазы имеет отрицательное значение, значение команды Du2* заполнения вычисляется вычитанием величины 2KDtdt/tc коррекции из значения команды Du1* заполнения U-фазы на основании уравнения (5). В результате, поскольку период отключения напряжения vu ШИМ U-фазы увеличивается, отклонение ширины импульса, обусловленное добавлением мертвого времени, компенсируется.
[0091] В этом случае, как показано на фиг. 4(b) и 4(c), блок 33 обработки коррекции тайминга импульсов получает значение счетчика треугольной волны два раза и вычисляет величину изменения ΔC вычитанием первого значения C1 счетчика из второго значения C2 счетчика на основании уравнения (7). Кроме того, блок 33 обработки коррекции тайминга импульсов определяет, больше или меньше нуля величина изменения ΔC треугольной волны.
[0092] Если величина изменения ΔC треугольной волны до момента времени t10 меньше нуля, блок 33 обработки коррекции тайминга импульсов определяет, что следующий период работы от момента времени t10 до момента времени t13 находится в периоде увеличения треугольной волны, и меняет знак величины коррекции на отрицательный. Кроме того, блок 33 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения вычитанием величины коррекции из значения команды Du2* заполнения, подвергнутого обработке компенсации, на основании уравнения (6).
[0093] В момент времени t10, треугольная волна находится во впадине, как показано на фиг. 4(c), поэтому треугольная волна переходит с периода уменьшения на период увеличения. Кроме того, скорректированное значение команды Du3* заполнения, вычисленное в период уменьшения, сравнивается с треугольной волной.
[0094] В момент времени t11, уровни сигнала сигналов Puu0 и Pul0 ШИМ переключаются, как показано на фиг. 4(d) и 4(e). Благодаря такой корректировке значения команды Du2* заполнения, подвергнутого обработке компенсации, моменты времени переключения сигналов Puu0 и Pul0 ШИМ можно приближать на мертвое время tdt от момента времени переключения на основании значения команды Du1* заполнения U-фазы.
[0095] Затем, поскольку блок 35 обработки добавления мертвого времени отдаляет момент времени роста сигнала Pul0 ШИМ от момента времени t11 на мертвое время tdt, импульс сигнала Pul возбуждения растет в момент времени t12, как показано на фиг. 4(g).
[0096] В момент времени t12 переключающий элемент нижнего каскада переходит в отключенное состояние, в то время как переключающий элемент верхнего каскада включен. Поэтому, как показано на фиг. 4(h), импульс напряжения vu ШИМ U-фазы, подаваемого на двигатель 6, падает.
[0097] Таким образом, использование значения команды Du3* заполнения, полученного вычитанием величины коррекции из значения команды Du2* заполнения в течение периода увеличения несущего сигнала, позволяет согласовывать момент времени уменьшения импульса напряжения vu ШИМ U-фазы с моментом времени переключения на основании значения команды Du1* заполнения.
[0098] В этом случае, как показано на фиг. 4(b) и 4(c), блок 33 обработки коррекции тайминга импульсов получает значение счетчика треугольной волны два раза и вычисляет величину изменения ΔC треугольной волны. Кроме того, блок 33 обработки коррекции тайминга импульсов определяет, что следующий период работы является периодом уменьшения треугольной волны, и меняет знак величины коррекции на положительный, поскольку величина изменения ΔC треугольной волны больше нуля.
[0099] Блок 33 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения путем прибавления величины коррекции к значению команды Du2* заполнения, подвергнутому обработке компенсации. В результате, скорректированное значение команды Du3* заполнения становится равным значению команды Du1* заполнения U-фазы.
[0100] В момент времени t13 треугольная волна находится на пике, как показано на фиг. 4(c), и треугольная волна переходит с периода увеличения на период уменьшения, поэтому скорректированное значение команды Du3* заполнения, вычисленное в период увеличения, сравнивается с треугольной волной.
[0101] В момент времени t14, уровни сигнала сигналов Puu0 и Pul0 ШИМ переключаются, как показано на фиг. 4(d) и 4(e). Кроме того, как показано на фиг. 4(f), блок 35 обработки добавления мертвого времени отдаляет момент времени роста сигнала Puu возбуждения от момента времени t14 на мертвое время tdt.
[0102] В этом случае, поскольку переключающий элемент нижнего каскада переходит во включенное состояние, в то время как переключающий элемент верхнего каскада отключен, импульс напряжения vu ШИМ U-фазы, подаваемого на двигатель 6, растет, как показано на фиг. 4(h).
[0103] Таким образом, использование значения команды Du3* заполнения, полученного путем прибавления величины коррекции к значению команды Du2* заполнения в течение периода уменьшения несущего сигнала, позволяет согласовывать момент времени роста импульса напряжения vu ШИМ U-фазы с моментом времени переключения на основании значения команды Du1* заполнения.
[0104] Как описано выше, когда ток iu U-фазы имеет отрицательное значение, значение команды Du2* заполнения, подвергнутое обработке компенсации, корректируется, благодаря чему, тайминг А/Ц преобразования согласуется с центральным моментом времени импульса трехфазного напряжения ШИМ. Аналогично, даже когда ток iu U-фазы имеет положительное значение, значение команды Du2* заполнения, подвергнутое обработке компенсации, корректируется, благодаря чему, тайминг А/Ц преобразования согласуется с центральным моментом времени импульса трехфазного напряжения ШИМ.
[0105] В общем случае, при добавлении мертвого времени к сигналу ШИМ, ширина импульса фактического напряжения ШИМ, подаваемого на двигатель 6, изменяется в зависимости от направления течения тока. Кроме того, фаза напряжения ШИМ задерживается на половину мертвого времени относительно треугольной волны.
[0106] В сравнении, значение команды Du1* заполнения U-фазы корректируется таким образом, что отклонение ширины импульса компенсируется блоком 32 обработки компенсации мертвого времени, показанным на фиг. 3. Кроме того, значение команды Du1* заполнения U-фазы корректируется таким образом, что отклонение фазы напряжения ШИМ компенсируется блоком 33 обработки коррекции тайминга импульсов. Это позволяет противодействовать отклонению фазы трехфазных напряжений ШИМ, а также a отклонению ширины импульса трехфазных напряжений ШИМ.
[0107] В частности, отклонению фазы можно препятствовать, не изменяя ширины импульса каждого напряжения ШИМ путем корректировки значения команды Du2* заполнения в зависимости от увеличения или уменьшения несущего сигнала. Это позволяет согласовывать тайминг А/Ц преобразования с центральным моментом времени импульса трехфазного напряжения ШИМ.
[0108] Таким образом, можно противодействовать смешению гармонической составляющей, обусловленной коллапсом формы волны, с данными тока, полученными А/Ц преобразованием тока двигателя 6. Использование блока 1 управления крутящим моментом двигателя, который осуществляет управление с обратной связью с использованием данных тока, позволяет противодействовать снижению точности управления крутящим моментом.
[0109] Заметим, что, когда ток iu U-фазы имеет отрицательное значение, значение команды Du2* заполнения, подвергнутое обработке компенсации, корректируется таким образом, что период отключения напряжения vu ШИМ U-фазы совпадает с периодом отключения на основании значения команды Du1* заполнения U-фазы, как показано на фиг. 4. При этом, когда ток iu U-фазы имеет положительное значение, период отключения напряжения vu ШИМ U-фазы корректируется так, чтобы он был короче периода отключения, на основании значения команды Du1* заполнения U-фазы.
[0110] На фиг. 5 показана блок-схема операций, демонстрирующая примерную последовательность обработки способа управления устройства 100 управления согласно этому варианту осуществления. Этот способ управления повторно выполняется в момент времени, когда треугольная волна, генерируемая блоком 30 генерирования несущего сигнала, находится на пике и во впадине.
[0111] На этапе S901, преобразователь 9 uvw-фазы/оси dq осуществляет А/Ц преобразование для сигнала обнаружения от детектора 5u и 5v тока для получения данных тока, представляющих ток iu U-фазы и ток iv V-фазы.Кроме того, вычислитель 8 скорости вращения двигателя осуществляет А/Ц преобразование для сигнала обнаружения от детектора 7 положения ротора для получения обнаруженного значения θ электрического угла.
[0112] На этапе S902, преобразователь 9 uvw-фазы/оси dq преобразует ток iu U-фазы и ток iv V-фазыданных тока и ток iw W-фазы, полученный из уравнения (2), в обнаруженное значение id тока по оси d и обнаруженное значение iq тока по оси q на основании обнаруженного значения θ электрического угла, как выражено в уравнении (3). Кроме того, преобразователь 9 uvw-фазы/оси dq возвращает обнаруженное значение id тока по оси d и обнаруженное значение iq тока по оси q на блок 1 управления крутящим моментом двигателя.
[0113] На этапе S903, вычислитель 8 скорости вращения двигателя вычисляет скорость N вращения двигателя на основании обнаруженного значения θ электрического угла. Кроме того, вычислитель 8 скорости вращения двигателя выводит скорость N вращения двигателя на блок 1 управления крутящим моментом двигателя.
[0114] На этапе S904, блок 1 управления крутящим моментом двигателя вычисляет значение команды vd* напряжения по оси d и значение команды vq* напряжения по оси q на основании значения команды T* крутящего момента, обнаруженного значения Vdc напряжения батареи,скорости N вращения двигателя, обнаруженного значения id тока по оси d и обнаруженного значения iq тока по оси q.
[0115] На этапе S905, преобразователь 2 оси dq/uvw-фазы преобразует значение команды vd* напряжения по оси d и значение команды vq* напряжения по оси q в значения команды vu*, vv* и vw* трехфазного напряжения на основании обнаруженного значения θ электрического угла, как выражено в уравнении (1). Кроме того, преобразователь 2 оси dq/uvw-фазы выводит преобразованные значения команды vu*, vv* и vw* трехфазного напряжения на преобразователь 3 ШИМ.
[0116] На этапе S906, блок 31 вычисления значения команды заполнения вычисляет трехфазные значения команды Du1, Dv1 и Dw1 заполнения на основании значений команды vu*, vv* и vw* трехфазного напряжения и обнаруженного значения Vdc напряжения батареи,как выражено в уравнении (4).
[0117] На этапе S907, блок 32 обработки компенсации мертвого времени осуществляет обработку компенсации мертвого времени для значений команды Du1, Dv1 и Dw1 заполнения каждой фазы. В частности, блок 32 обработки компенсации мертвого времени вычисляет значение команды Du2, Dv2 и Dw2 заполнения, подвергнутое обработке компенсации, на основании трехфазных токов iu, iv и iw двигателя 6 и трехфазного значения команды Du1, Dv1 и Dw1 заполнения, как выражено в уравнении (5). Таким образом, можно противодействовать отклонению ширины импульса между напряжениями vu, vv и vw ШИМ, подаваемыми на каждую фазу двигателя 6.
[0118] На каждом из этапов S908 - S910 обработки, блок 33 обработки коррекции тайминга импульсов вычисляет скорректированные значения команды Du3, Dv3 и Dw3 заполнения путем осуществления обработки коррекции тайминга импульсов для значений команды Du2, Dv2 и Dw2 заполнения, подвергнутых обработке компенсации.
[0119] На этапе S908, блок 33 обработки коррекции тайминга импульсов определяет, находится ли период работы, в котором получается значение счетчика треугольной волны, в периоде увеличения или периоде уменьшения треугольной волны.
[0120] На этапе S909, блок 33 обработки коррекции тайминга импульсов прибавляет величину 2KDtdt/tc коррекции к значениям команды Du2, Dv2 и Dw2 заполнения, подвергнутым обработке компенсации, поскольку следующий период работы находится в периоде уменьшения, если треугольная волна находится в периоде увеличения, как выражено в уравнении (6). Таким образом, можно задерживать момент времени переключения сигналов Puu0 и Pul0 ШИМ на половину мертвого времени tdt, когда треугольная волна уменьшается.
[0121] На этапе S910, блок 33 обработки коррекции тайминга импульсов вычитает величину 2KDtdt/tc коррекции из значений команды Du2, Dv2 и Dw2 заполнения, подвергнутых обработке компенсации, поскольку следующий период работы находится в периоде увеличения, если треугольная волна находится в периоде уменьшения. Таким образом, можно приближать момент времени переключения сигналов Puu0 и Pul0 ШИМ на половину мертвого времени tdt, когда треугольная волна увеличивается.
[0122] Таким образом, блок 33 обработки коррекции тайминга импульсов меняет знак величины коррекции в зависимости от увеличения или уменьшения несущего сигнала. Это позволяет противодействовать отклонению фазы импульсов трехфазных напряжений vu, vv и vw ШИМ, как показано на фиг. 4(h).
[0123] На этапе S911, блок 34 обработки преобразования ШИМ генерирует сигналы Puu0, Pul0, Pvu0, Pvl0, Pvu0 и Pvl0 ШИМ для пары переключающих элементов каждой фазы на основании скорректированных значений команды Du3*, Dv3* и Dw3* заполнения. Кроме того, блок 35 обработки добавления мертвого времени генерирует сигналы Puu, Pul, Pvu, Pvl, Pwu и Pwl возбуждения путем добавления мертвого времени к сигналам Puu0, Pul0, Pvu0, Pvl0, Pwu0, Pwl0 ШИМ каждой фазы, как показано на фиг. 4(d) - 4(g).
[0124] Блок 35 обработки добавления мертвого времени выводит сигналы Puu и Pul возбуждения на каждый управляющий вывод пары переключающих элементов, соответствующих U-фазе, выводит сигналы Pvu и Pvl возбуждения на каждый управляющий вывод пары переключающих элементов, соответствующих V-фазе, и выводит сигналы Pwu и Pwl возбуждения на каждый управляющий вывод пары переключающих элементов, соответствующих W-фазе.
[0125] На этапе S912, инвертор 4 возбуждает пару переключающих элементов каждой фазы на основании каждого из сигналов Puu, Pul, Pvu, Pvl, Pwu и Pwl возбуждения и подает напряжения vu, vv и vw ШИМ на каждую фазу двигателя 6, соответственно. На этом последовательность процедур обработки способа управления устройства 100 управления заканчивается.
[0126] Согласно первому варианту осуществления настоящего изобретения, устройство 100 управления имеет пару переключающих элементов, которые преобразуют мощность от источника 10 питания в мощность переменного тока и подают мощность переменного тока на устройство электрического двигателя. Устройство 100 управления получает сигнал тока или напряжения, подаваемый на двигатель 6, и осуществляет А/Ц преобразование из аналогового формата в цифровой формат из полученных сигналов.
[0127] Кроме того, устройство 100 управления имеет блок 31 вычисления значения команды заполнения, который вычисляет значение команды заполнения для осуществления управления ШИМ для устройства электрического двигателя на основании сигнала, подвергнутого А/Ц преобразованию, и блок 34 обработки преобразования ШИМ, который генерирует сигнал ШИМ на основании значения команды заполнения и несущего сигнала. Кроме того, устройство 100 управления имеет инвертор 4, который управляет возбуждением устройства электрического двигателя путем переключения состояния соединения переключающего элемента на основании сигнала ШИМ.
[0128] Кроме того, устройство 100 управления имеет блок 33 обработки коррекции тайминга импульсов, который определяет, увеличивается ли несущий сигнал или уменьшается, и корректирует значение команды заполнения на основании результата определения, увеличивается ли несущий сигнал или уменьшается.
[0129] Таким образом, можно регулировать сдвиг момента времени переключения пары переключающих элементов для момента времени для инициирования А/Ц преобразования посредством вычислительной обработки значения команды заполнения. По этой причине, средний момент времени периода включения напряжения ШИМ для пары переключающих элементов можно регулировать к таймингу А/Ц преобразования. Поэтому, по сравнению с конфигурацией уровня техники, в которой тайминг А/Ц преобразования равномерно сдвигается на заранее определенное время, можно противодействовать снижению точности обнаружения переменного тока, подаваемого на устройство электрического двигателя, независимо от коэффициента заполнения.
[0130] Согласно этому варианту осуществления, двигатель используется в качестве устройства электрического двигателя, и инвертор 4 снабжен множеством пар переключающих элементов для каждой фазы двигателя 6. Кроме того, блок 33 обработки коррекции тайминга импульсов корректирует значение команды заполнения на основании того, увеличивается ли несущий сигнал или уменьшается. Это позволяет противодействовать коллапсу формы волны данных тока, дискретизированных посредством А/Ц преобразования.
[0131] Это позволяет противодействовать смешению гармонической составляющей, обусловленной коллапсом формы волны, с данными тока, полученными посредством А/Ц преобразования. Соответственно, можно противодействовать снижению точности обнаружения мощности переменного тока, подаваемой на двигатель 6. Кроме того, поскольку устройство 100 управления вычисляет значение команды заполнения путем возврата данных тока двигателя 6, можно противодействовать снижению точности управления крутящим моментом двигателя, подавляя шум, включенный в данные тока.
[0132] Согласно этому варианту осуществления, устройство 100 управления дополнительно имеет блок 35 обработки добавления мертвого времени, добавляющий к сигналу ШИМ мертвое время, в течение которого пара переключающих элементов одновременно находятся в непроводящем состоянии. Кроме того, блок 33 обработки коррекции тайминга импульсов корректирует значения команды Du1* и Du2* заполнения на основании мертвого времени tdt и цикла tc несущего сигнала. Таким образом, можно противодействовать фазовой задержке напряжения ШИМ, обусловленной добавлением мертвого времени к сигналу ШИМ.
[0133] Согласно этому варианту осуществления, блок 33 обработки коррекции тайминга импульсов меняет величину коррекции для корректировки значения команды заполнения между периодом увеличения и периодом уменьшения несущего сигнала.
[0134] В частности, поскольку значение команды заполнения корректируется путем смены знака величины коррекции без изменения величины коррекции, как показано на фиг. 5, абсолютное значение величины коррекции постоянно. Это позволяет упрощать вычисление величины коррекции. Соответственно, можно противодействовать усложнению операции управления, обусловленному обработкой коррекции тайминга импульсов. Кроме того, можно противодействовать отклонениям, как ширины импульса, так и фазы напряжения ШИМ, обусловленным добавлением мертвого времени, путем изменения величины коррекции для значения команды Du1* заполнения между периодом увеличения и периодом уменьшения несущего сигнала как показано на фиг. 4.
[0135] Согласно этому варианту осуществления, устройство 100 управления дополнительно имеет блок 32 обработки компенсации мертвого времени, который осуществляет обработку компенсации для компенсации отклонения ширины импульса напряжения ШИМ, подаваемого на двигатель 6, для значения команды Du1* заполнения U-фазы. Кроме того, блок 33 обработки коррекции тайминга импульсов корректирует значение команды Du2* заполнения, подвергнутое обработке компенсации, на основании того, увеличивается ли несущий сигнал или уменьшается, как выражено в уравнении (6).
[0136] Таким образом, выполняя обработку коррекции тайминга импульсов после обработки компенсации ширины импульса, можно противодействовать отклонениям, как ширины импульса, так и фазы напряжения ШИМ, препятствуя при этом усложнению операции управления, обусловленному обработкой коррекции. Кроме того, можно осуществлять монтаж на устройстве управления, заранее снабженном блоком 32 обработки компенсации мертвого времени, с использованием простой конфигурации.
[0137] Согласно этому варианту осуществления, блок 33 обработки коррекции тайминга импульсов получает значение несущего сигнала несколько раз в течение периода работы, показанного фиг. 2, как выражено в уравнении (6), и определяет, увеличивается ли несущий сигнал или уменьшается. Кроме того, блок 33 обработки коррекции тайминга импульсов увеличивает или уменьшает величину коррекции значения команды заполнения на основании результата определения. Кроме того, блок 34 обработки преобразования ШИМ генерирует сигнал ШИМ путем сравнения скорректированного значения команды заполнения и несущего сигнала в течение следующего периода работы после периода работы, в котором значение несущего сигнала получается, как показано на фиг. 4.
[0138] Таким образом, увеличивая или уменьшая величину коррекции значения команды заполнения, подвергнутого обработке компенсации, в зависимости от увеличения или уменьшения несущего сигнала, можно одновременно компенсировать задержку в моменты времени роста и спада напряжения ШИМ, подаваемого на двигатель 6. Кроме того, определяя, увеличивается ли несущий сигнал или уменьшается в течение периода работы до периода работы, в котором устанавливается скорректированное значение команды заполнения, можно надежно устанавливать скорректированное значение команды заполнения в момент времени для инициирования А/Ц преобразования.
[0139] Заметим, что, хотя в этом варианте осуществления значение команды заполнения, подвергнутое обработке компенсации мертвого времени, корректируется на основании уравнения (5), обработка компенсации мертвого времени может осуществляться для значения команды заполнения с использованием способа, отличного от представленного в уравнении (5). В связи с этим, в нижеследующем варианте осуществления, будет описано устройство управления, которое выполняет обработку компенсации мертвого времени с использованием способа, отличного от представленного в уравнении (5), и способа корректировки значения команды заполнения, подвергнутого обработке компенсации мертвого времени.
Второй вариант осуществления
[0140] Опишем конфигурацию устройства управления согласно второму варианту осуществления настоящего изобретения.
[0141] Базовая конфигурация устройства управления согласно этому варианту осуществления аналогична конфигурации устройства 100 управления, показанной на фиг. 1. По этой причине, будет описана каждая конфигурация устройства управления согласно этому варианту осуществления, при этом аналогичные ссылочные позиции обозначают элементы, аналогичные показанным на фиг. 1 и 3.
[0142] Согласно этому варианту осуществления, обработка, осуществляемая блоком 32 обработки компенсации мертвого времени и блоком 33 обработки коррекции тайминга импульсов преобразователя 3 ШИМ, показанными на фиг. 3, отличается от обработки первого варианта осуществления. По этой причине, здесь будут подробно описаны только конфигурации блока 32 обработки компенсации мертвого времени и блока 33 обработки коррекции тайминга импульсов, и другие конфигурации не будут повторно описаны, поскольку они аналогичны конфигурациям первого варианта осуществления.
[0143] Конфигурации каждой фазы преобразователя 3 ШИМ, в основном, аналогичны. Поэтому здесь будет описана только конфигурация U-фазы.
[0144] Аналогично первому варианту осуществления, блок 32 обработки компенсации мертвого времени вычисляет значение команды Du2* заполнения, подвергнутое обработке компенсации, путем корректировки значения команды Du1* заполнения U-фазы на основании тока iu U-фазы.
[0145] Согласно этому варианту осуществления, блок 32 обработки компенсации мертвого времени корректирует значение команды Du1* заполнения U-фазы таким образом, что период отключения напряжения vu ШИМ U-фазы увеличивается только в случае, когда ток iu U-фазы имеет отрицательное значение, как выражено в следующем уравнении (8).
[0146]
Уравнение 8
[0147] На основании уравнения (8), если ток iu U-фазы больше или равен нулю, блок 32 обработки компенсации мертвого времени выводит значение команды Du1* заполнения U-фазы как значение команды Du2* заполнения, подвергнутое обработке компенсации, без коррекции. В противном случае, если ток iu U-фазы меньше нуля, блок 32 обработки компенсации мертвого времени вычитает величину 2KD2tdt/tc коррекции из значения команды Du1* заполнения U-фазы и выводит значение команды Du2* заполнения, подвергнутое обработке компенсации. Таким образом, можно компенсировать отклонение ширины импульса напряжения vu ШИМ U-фазы, генерируемого путем добавления мертвого времени tdt к сигналу ШИМ от блока 34 обработки преобразования ШИМ.
[0148] Аналогично первому варианту осуществления, блок 33 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения путем осуществления обработки коррекции тайминга импульсов для значения команды Du2* заполнения, подвергнутого обработке компенсации, в зависимости от увеличения или уменьшения несущего сигнала.
[0149] Согласно этому варианту осуществления, блок 33 обработки коррекции тайминга импульсов заменяет величину коррекции для корректировки значения команды Du2* заполнения, подвергнутого обработке компенсации, разными значениями в зависимости от полярности величины изменения ΔC треугольной волны, как выражено в следующем уравнении (9). Величина изменения ΔC треугольной волны вычисляется на основании вышеупомянутого уравнения (7).
[0150]
Уравнение 9

[0151] Второй член 2KD2tdt/tc правой стороны уравнения (9) является величиной коррекции. Эта величина 2KD2tdt/tc коррекции представляет собой значение, полученное путем преобразования периода мертвого времени tdt из временной области в область значений счетчика треугольной волны.
[0152] На основании уравнения (9), если величина изменения ΔC треугольной волны меньше нуля, блок 33 обработки коррекции тайминга импульсов определяет, что треугольная волна находится в периоде уменьшения. Если величина изменения ΔC треугольной волны больше или равна нулю, принимается решение, что треугольная волна находится в периоде увеличения. Таким образом, блок 33 обработки коррекции тайминга импульсов определяет, увеличивается или уменьшается треугольная волна, выводимая из блока 30 генерирования несущего сигнала.
[0153] Если треугольная волна находится в периоде уменьшения, блок 33 обработки коррекции тайминга импульсов выводит значение команды Du2* заполнения, подвергнутое обработке компенсации, как скорректированное значение команды Du3* заполнения, поскольку следующий период работы является периодом увеличения треугольной волны.
[0154] В противном случае, если треугольная волна находится в периоде увеличения, блок 33 обработки коррекции тайминга импульсов прибавляет величину 2KD2tdt/tc коррекции к значению команды Du2* заполнения, подвергнутому обработке компенсации, поскольку следующий период работы находится в периоде уменьшения треугольной волны. Таким образом, если треугольная волна находится в периоде увеличения, блок 33 обработки коррекции тайминга импульсов меняет величину коррекции, вычитаемую из значения команды Du2* заполнения, подвергнутого обработке компенсации, от нуля до заранее определенного значения 2KD2tdt/tc.
[0155] Таким образом, аналогично первому варианту осуществления, блок 33 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения путем изменения значения величины коррекции для корректировки значения команды Du2* заполнения между периодом увеличения и периодом уменьшения треугольной волны.
[0156] На фиг. 6 показана временная диаграмма, демонстрирующая пример, в котором напряжение vu ШИМ U-фазы генерируется преобразователем 3 ШИМ согласно этому варианту осуществления на основании значения команды Du1* заполнения U-фазы, когда ток iu U-фазы имеет отрицательное значение.
[0157] Ось ординат на фиг. 6(a) - 6(h) аналогична оси ординат на фиг. 4(a) - 4(h). Кроме того, ось абсцисс на фиг. 6(a) - 6(h) является общей осью времени.
[0158] В операции управления до момента времени t20, значение команды Du1* заполнения U-фазы вычисляется, как показано на фиг. 6(c). При этом, поскольку ток iu U-фазы имеет отрицательное значение, значение команды Du2* заполнения вычисляется вычитанием величины 2KD2tdt/tc коррекции из значения команды Du1* заполнения U-фазы на основании уравнения (8).
[0159] В этом случае, как показано на фиг. 6(b) и 6(c), блок 33 обработки коррекции тайминга импульсов получает значение счетчика треугольной волны два раза и вычисляет величину изменения ΔC вычитанием первого значения C1 счетчика из второго значения C2 счетчика на основании уравнения (7).
[0160] Если величина изменения ΔC треугольной волны до момента времени t20 меньше нуля, блок 33 обработки коррекции тайминга импульсов определяет, что следующий период работы от момента времени t20 до момента времени t23 находится в периоде увеличения треугольной волны, и меняет величину коррекции на нуль, как выражено в уравнении (9). По этой причине, блок 33 обработки коррекции тайминга импульсов устанавливает значение команды Du2* заполнения, подвергнутое обработке компенсации, как скорректированное значение команды Du3* заполнения.
[0161] В результате, как показано на фиг. 6(d) и 6(e), моменты времени переключения сигналов Puu0 и Pul0 ШИМ опережают момент времени t22 переключения на мертвое время tdt на основании значения команды Du1* заполнения U-фазы. По этой причине, сигналы Puu0 и Pul0 ШИМ переключаются в момент времени t21.
[0162] Как показано на фиг. 6(g), блок 32 обработки компенсации мертвого времени отдаляет момент времени роста сигнала Pul0 ШИМ на мертвое время tdt от момента времени t21. В результате, импульс сигнала Pul возбуждения растет в момент времени t22 переключения на основании значения команды Du1* заполнения U-фазы.
[0163] В результате, в момент времени t22 переключения на основании значения команды Du1* заполнения U-фазы, импульс напряжения vu ШИМ U-фазы падает, и напряжение vu ШИМ U-фазы находится в периоде отключения, как показано на фиг. 6(h).
[0164] В этом случае, как показано на фиг. 6(b) и 6(c), блок 33 обработки коррекции тайминга импульсов получает значение счетчика треугольной волны два раза и вычисляет величину изменения ΔC треугольной волны. Поскольку величина изменения ΔC вычисленной треугольной волны больше нуля, блок 33 обработки коррекции тайминга импульсов определяет, что следующий период работы находится в периоде уменьшения треугольной волны, и меняет величину коррекции на значение, большее нуля, 2KD2tdt/tc.
[0165] Блок 33 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения вычитанием величины коррекции из значения команды Du2* заполнения, подвергнутого обработке компенсации, на основании уравнения (9). В результате, скорректированное значение команды Du3* заполнения становится равным значению команды Du3* заполнения согласно фиг. 4.
[0166] В результате, в момент времени t24, уровни сигнала сигналов Puu0 и Pul0 ШИМ переключаются, как показано на фиг. 6(d) и 6(e), таким образом, что сигнал Pul возбуждения переключающего элемента нижнего каскада падает, как показано на фиг. 6(g). Поэтому, в момент времени t24 переключения на основании значения команды Du1* заполнения U-фазы, импульс напряжения vu ШИМ U-фазы растет, как показано на фиг. 6(h).
[0167] Таким образом, переключая величину коррекции для корректировки значения команды Du2* заполнения, подвергнутого обработке компенсации, между периодом увеличения и периодом уменьшения несущего сигнала, можно согласовывать момент времени переключения импульса напряжения vu ШИМ с моментом времени переключения на основании значения команды Du1* заполнения U-фазы.
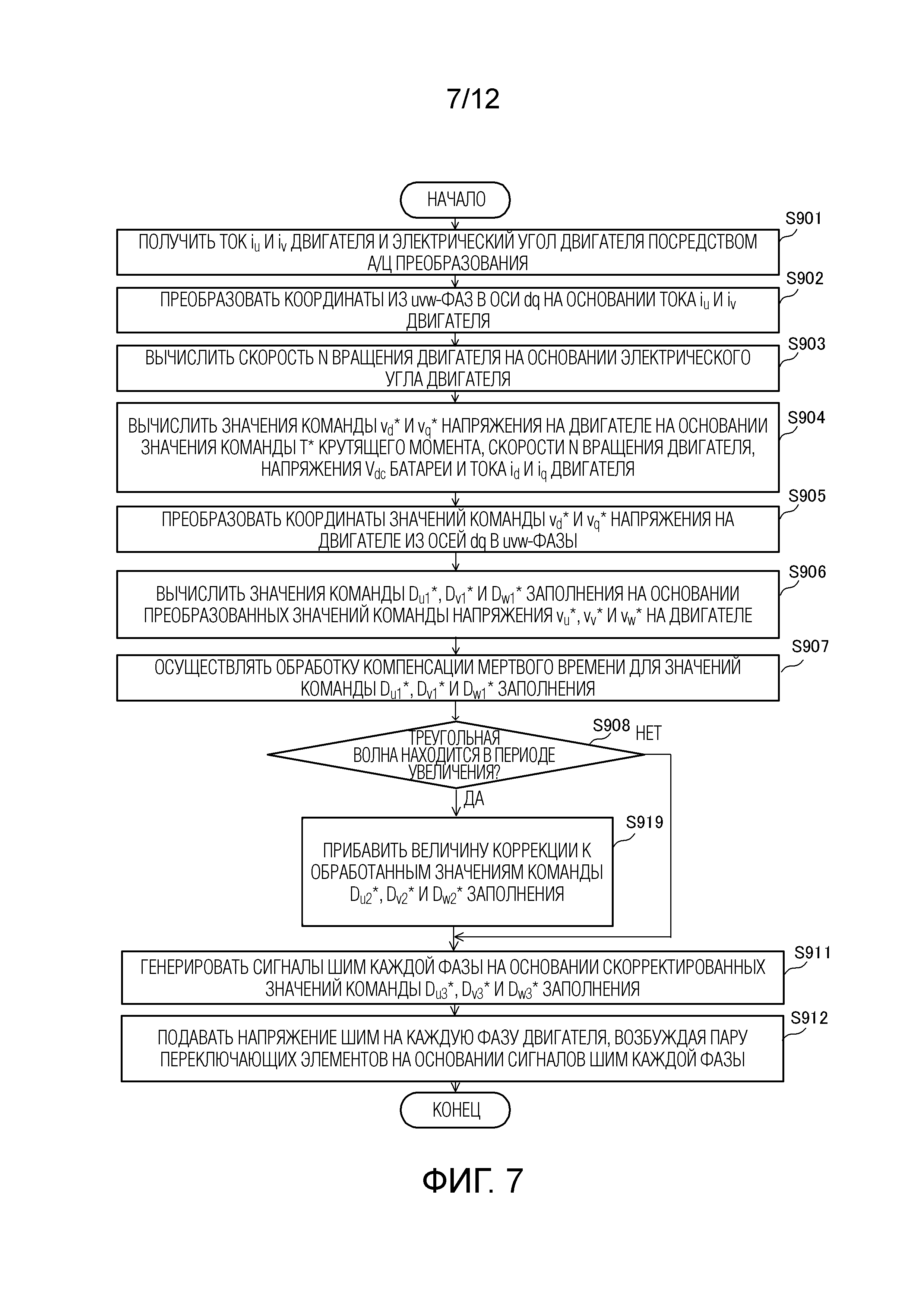
[0168] На фиг. 7 показана блок-схема операций, демонстрирующая примерную последовательность обработки способа управления согласно этому варианту осуществления. Этот способ управления повторно выполняется в каждом периоде работы, показанном на фиг. 2.
[0169] Согласно этому варианту осуществления способа управления, каждая обработка этапов S917 и S919 добавляется вместо каждой обработки этапов S907, S909 и S910, показанных на фиг. 5. По этой причине, здесь будет подробно описана только каждая обработка этапов S917 и S919.
[0170] На этапе S917, блок 32 обработки компенсации мертвого времени осуществляет обработку компенсации мертвого времени для значения команды Du1, Dv1 и Dw1 заполнения, вычисленного на этапе S906. Согласно этому варианту осуществления, блок 32 обработки компенсации мертвого времени вычисляет значения команды Du2, Dv2 и Dw2 заполнения, подвергнутые обработке компенсации, на основании токов iu, iv и iw двигателя 6 каждой фазы и значений команды Du1, Dv1 и Dw1 заполнения, как выражено в уравнении (8). Таким образом, можно противодействовать отклонению ширины импульса трехфазного напряжения ШИМ, подаваемого на двигатель 6.
[0171] На этапе S908, блок 33 обработки коррекции тайминга импульсов определяет, находится ли треугольная волна в периоде увеличения или периоде уменьшения. Если треугольная волна находится в периоде уменьшения, блок 33 обработки коррекции тайминга импульсов переходит к обработке этапа S911, не корректируя значения команды Du2*, Dv2* и Dw2* заполнения, подвергнутые обработке компенсации.
[0172] В результате, как показано на фиг. 6, момент времени роста сигнала Pul0 ШИМ наступает раньше на мертвое время tdt. Это позволяет согласовывать момент времени спада напряжения vu ШИМ U-фазы с моментом времени переключения на основании значения команды Du1* заполнения U-фазы.
[0173] На этапе S919, если треугольная волна находится в периоде увеличения, блок 33 обработки коррекции тайминга импульсов прибавляет величину 2KD2tdt/tc коррекции к значению команды Du2*, Dv2* и Dw2* заполнения, подвергнутому обработке компенсации, как выражено в уравнении (9), и процесс переходит к этапу S911.
[0174] В результате, как показано на фиг. 6, момент времени спада сигнала Pul возбуждения становится моментом времени переключения на основании значения команды Du1* заполнения U-фазы. Это позволяет согласовывать момент времени роста напряжения vu ШИМ с моментом времени переключения на основании значения команды Du1* заполнения U-фазы.
[0175] Согласно второму варианту осуществления настоящего изобретения, блок 33 обработки коррекции тайминга импульсов меняет величину коррекции значения команды заполнения, вычисленного на основании уравнения (8), на разные значения между периодом увеличения и периодом уменьшения несущего сигнала, как выражено в уравнении (9). В результате, аналогично первому варианту осуществления, можно противодействовать отклонению, как ширины импульса, так и фазы напряжения ШИМ, обусловленному добавлением мертвого времени.
Третий вариант осуществления
[0176] Опишем конфигурацию устройства управления согласно третьему варианту осуществления настоящего изобретения.
[0177] Согласно этому варианту осуществления, обработка блока 32 обработки компенсации мертвого времени и блока 33 обработки коррекции тайминга импульсов, осуществляемая преобразователем 3 ШИМ, показанным на фиг. 3, отличается от обработки согласно первому и второму вариантам осуществления.
[0178] Здесь будут подробно описаны только блок 32 обработки компенсации мертвого времени и блок 33 обработки коррекции тайминга импульсов, и другие конфигурации не будут повторно описаны, поскольку они аналогичны конфигурациям первого варианта осуществления. Кроме того, поскольку все фазы преобразователя 3 ШИМ имеют, в основном, одинаковую конфигурацию, будет описана только конфигурация U-фазы.
[0179] Согласно этому варианту осуществления, блок 32 обработки компенсации мертвого времени корректирует значение команды Du1* заполнения U-фазы таким образом, что период отключения напряжения vu ШИМ U-фазы уменьшается только в случае, когда ток iu U-фазы имеет положительное значение, как выражено в следующем уравнении (10).
[0180]
Уравнение 10

[0181] На основании уравнения (10), если ток iu U-фазы меньше нуля, блок 32 обработки компенсации мертвого времени выводит значение команды Du1* заполнения U-фазы как значение команды Du2* заполнения, подвергнутое обработке компенсации, без коррекции. В противном случае, если ток iu U-фазы больше или равен нулю, блок 32 обработки компенсации мертвого времени прибавляет величину 2KD2tdt/tc коррекции к значению команды Du1* заполнения U-фазы и выводит значение команды Du2* заполнения, подвергнутое обработке компенсации.
[0182] Согласно этому варианту осуществления, блок 33 обработки коррекции тайминга импульсов переключает величину коррекции значения команды Du2* заполнения, подвергнутого обработке компенсации, на разные значения в зависимости от полярности величины изменения ΔC треугольной волны, как выражено в следующем уравнении (11).
[0183]
Уравнение 11
[0184] Второй член правой стороны уравнения (11) является величиной коррекции. Эта величина 2KD2tdt/tc коррекции представляет собой значение, полученное путем преобразования периода мертвого времени tdt из временной области в область значений счетчика треугольной волны.
[0185] На основании уравнения (11), если величина изменения ΔC треугольной волны меньше нуля, блок 33 обработки коррекции тайминга импульсов определяет, что треугольная волна находится в периоде уменьшения. Если величина изменения ΔC треугольной волны больше или равна нулю, блок 33 обработки коррекции тайминга импульсов определяет, что треугольная волна находится в периоде увеличения. Таким образом, блок 33 обработки коррекции тайминга импульсов определяет, увеличивается или уменьшается треугольная волна, выводимая из блока 30 генерирования несущего сигнала.
[0186] Если треугольная волна находится в периоде уменьшения, блок 33 обработки коррекции тайминга импульсов вычитает величину 2KD2tdt/tc коррекции из значения команды Du2* заполнения, подвергнутого обработке компенсации, поскольку следующий период работы находится в периоде увеличения треугольной волны. Таким образом, если треугольная волна находится в периоде уменьшения, блок 33 обработки коррекции тайминга импульсов меняет величину коррекции, вычитаемую из значения команды Du2* заполнения, подвергнутого обработке компенсации, от нуля до заранее определенного значения 2KD2tdt/tc.
[0187] В противном случае, если треугольная волна находится в периоде увеличения, блок 33 обработки коррекции тайминга импульсов выводит значение команды Du2* заполнения, подвергнутое обработке компенсации, как скорректированное значение команды Du3* заполнения, поскольку следующий период работы находится в периоде уменьшения треугольной волны.
[0188] Таким образом, аналогично вышеупомянутым вариантам осуществления, блок 33 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения путем изменения величины коррекции значения команды Du2* заполнения между периодом увеличения и периодом уменьшения треугольной волны, позволяющее скомпенсировать фазовую задержку напряжения ШИМ.
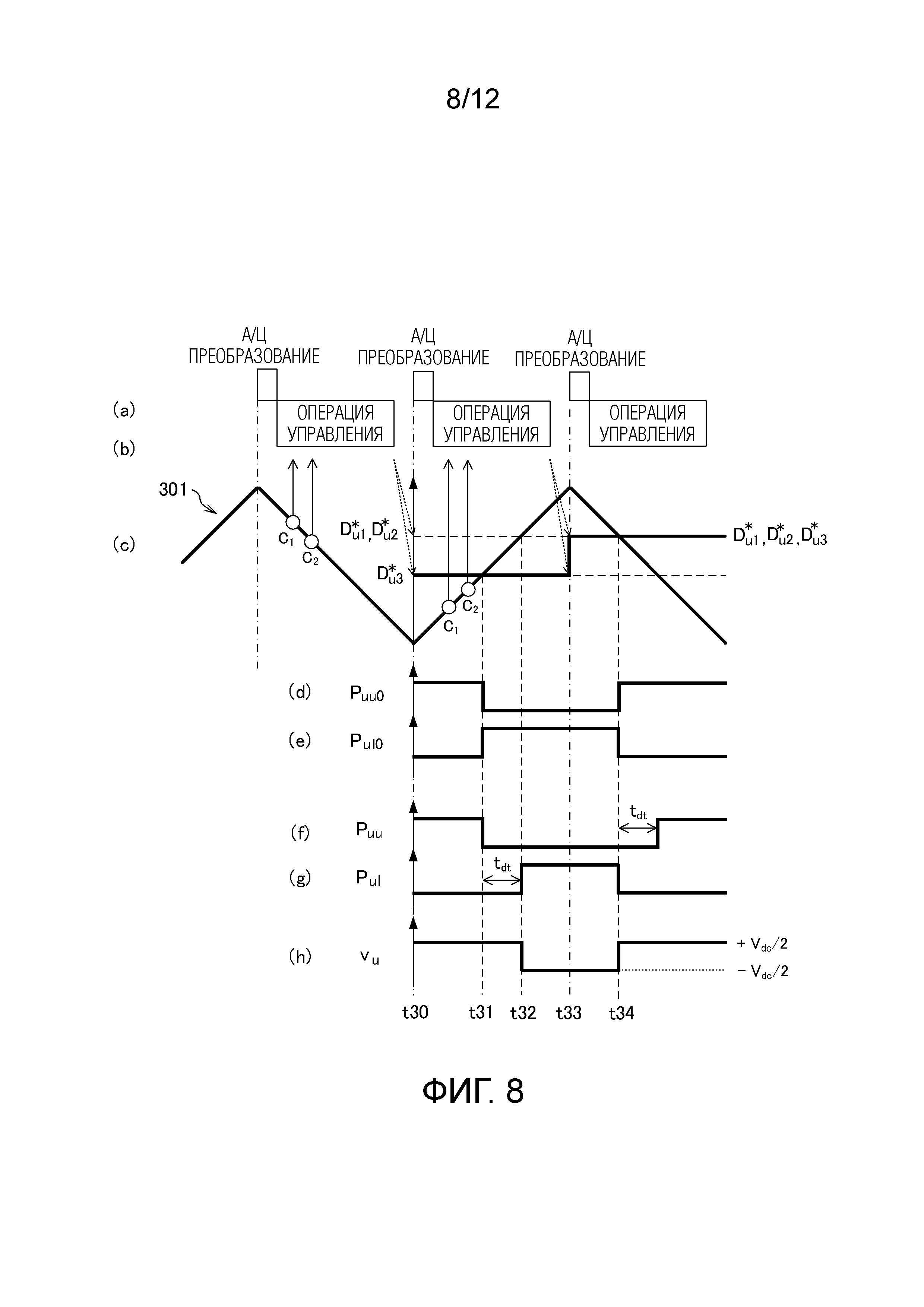
[0189] На фиг. 8 показана временная диаграмма, демонстрирующая пример, в котором преобразователь 3 ШИМ согласно этому варианту осуществления генерирует напряжение vu ШИМ на основании значения команды Du1* заполнения U-фазы в случае, когда ток iu U-фазы имеет отрицательное значение.
[0190] Ось ординат на фиг. 8(a) - 8(h) аналогична оси ординат на фиг. 4(a) - 4(h). Кроме того, ось абсцисс на фиг. 8(a) - 8(h) является общей осью времени.
[0191] В ходе операции управления до момента времени t30, значение команды Du1* заполнения U-фазы вычисляется, как показано на фиг. 8(c). При этом, поскольку ток iu U-фазы имеет отрицательное значение, значение команды Du1* заполнения U-фазы устанавливается как значение команды Du2* заполнения без коррекции на основании уравнения (10). В этом случае, как показано на фиг. 8(b) и 8(c), блок 33 обработки коррекции тайминга импульсов вычисляет величину изменения ΔC вычитанием первого значения C1 счетчика из второго значения C2 счетчика на основании уравнения (7).
[0192] Величина изменения ΔC треугольной волны до момента времени t30 меньше нуля. Поэтому блок 33 обработки коррекции тайминга импульсов определяет, что следующий период работы от момента времени t30 до момента времени t33 находится в периоде увеличения треугольной волны, и меняет величину коррекции на значение 2KD2tdt/tc, большее нуля, как выражено в уравнении (11). Кроме того, блок 33 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения вычитанием величины 2KD2tc/tdt коррекции из значения команды Du2* заполнения, подвергнутого процессу компенсации.
[0193] В результате, как показано на фиг. 8(d) и 8(e), моменты времени переключения сигналов Puu0 и Pul0 ШИМ опережают момент времени t32 переключения на основании значения команды Du1* заполнения U-фазы на мертвое время tdt. По этой причине, в момент времени t31, сигналы Puu0 и Pul0 ШИМ взаимно переключаются.
[0194] Соответственно, как показано на фиг. 8(g), момент времени роста сигнала Pul0 ШИМ задерживается от момента времени t31 на мертвое время tdt. Поэтому, в момент времени t32, импульс сигнала Pul возбуждения растет.
[0195] В результате, в момент времени t32 переключения на основании значения команды Du1* заполнения U-фазы, импульс напряжения vu ШИМ U-фазы падает, и напряжение vu ШИМ U-фазы находится в периоде отключения, как показано на фиг. 8(h).
[0196] В этом случае, как показано на фиг. 8(b) и 8(c), блок 33 обработки коррекции тайминга импульсов вычисляет величину изменения ΔC треугольной волны, получая значение счетчика треугольной волны два раза на основании уравнения (7). Поскольку вычисленная величина изменения ΔC треугольной волны больше нуля, блок 33 обработки коррекции тайминга импульсов определяет, что следующий период работы находится в периоде уменьшения треугольной волны, и меняет величину коррекции на нуль.
[0197] В момент времени t33, блок 33 обработки коррекции тайминга импульсов устанавливает значение команды Du2* заполнения, подвергнутое обработке компенсации, как скорректированное значение команды Du3* заполнения на основании уравнения (11). Это скорректированное значение команды Du3* заполнения равно значению команды Du3* заполнения согласно фиг. 4 и 6.
[0198] В результате, в момент времени t34, уровни сигнала сигналов Puu0 и Pul0 ШИМ переключаются, как показано на фиг. 8(d) и 8(e). Соответственно, сигнал Pul возбуждения падает, как показано на фиг. 8(g). Поэтому, в момент времени переключения t34 на основании значения команды Du1* заполнения U-фазы, импульс напряжения vu ШИМ U-фазы растет, как показано на фиг. 8(h).
[0199] Таким образом, переключая величину коррекции значения команды Du2* заполнения, подвергнутого обработке компенсации, в зависимости от увеличения или уменьшения несущего сигнала, можно согласовывать момент времени переключения напряжения vu ШИМ U-фазы с моментом времени переключения на основании значения команды Du1* заполнения U-фазы.
[0200] На фиг. 9 показана блок-схема операций, демонстрирующая примерную последовательность обработки способа управления согласно этому варианту осуществления. Этот способ управления повторно выполняется в каждом периоде работы, показанном на фиг. 2.
[0201] Согласно этому варианту осуществления способа управления, каждая обработка этапов S920 и S927 добавляется вместо каждой обработки этапов S907, S909 и S910, показанных на фиг. 5. По этой причине, здесь будет подробно описана только каждая обработка этапов S920 и S927.
[0202] На этапе S927, блок 32 обработки компенсации мертвого времени осуществляет обработку компенсации мертвого времени для трехфазных значений команды Du1*, Dv1* и Dw1* заполнения, вычисленных на этапе S906. Согласно этому варианту осуществления, блок 32 обработки компенсации мертвого времени вычисляет значения команды Du2*, Dv2* и Dw2* заполнения, подвергнутые обработке компенсации, на основании токов iu, iv и iw каждой фазы двигателя 6 и значений команды Du1*, Dv1* и Dw1* заполнения, как выражено в уравнении (10). Таким образом, можно противодействовать отклонению ширины импульса напряжения ШИМ, подаваемого на каждую фазу двигателя 6.
[0203] На этапе S908, блок 33 обработки коррекции тайминга импульсов определяет, находится ли треугольная волна в периоде увеличения или периоде уменьшения. Если треугольная волна находится в периоде увеличения, блок 33 обработки коррекции тайминга импульсов переходит к обработке этапа S911, не корректируя значения команды Du2*, Dv2* и Dw2* заполнения, подвергнутые обработке компенсации.
[0204] В результате, как показано на фиг. 8, момент времени роста сигнала Pul0 ШИМ наступает раньше на мертвое время tdt. Это позволяет согласовывать момент времени спада напряжения vu ШИМ U-фазы с моментом времени переключения на основании значения команды заполнения U-фазы Du1.
[0205] На этапе S920, если треугольная волна находится в периоде уменьшения, блок 33 обработки коррекции тайминга импульсов вычитает величину 2KD2tdt/tc коррекции из значений команды Du2*, Dv2* и Dw2* заполнения, подвергнутых обработке компенсации, как выражено в уравнении (11), и процесс переходит к этапу S911.
[0206] В результате, как показано на фиг. 8, момент времени спада сигнала Pul возбуждения становится моментом времени переключения на основании значения команды Du1* заполнения U-фазы. Это позволяет согласовывать момент времени роста напряжения vu ШИМ U-фазы с моментом времени переключения на основании значения команды Du1* заполнения U-фазы.
[0207] Согласно третьему варианту осуществления, блок 33 обработки коррекции тайминга импульсов переключает величины коррекция значений команды заполнения, подвергнутых обработке компенсации, вычисленных с использованием уравнения (10) на разные значения между периодом увеличения и периодом уменьшения несущего сигнала, как выражено в уравнении (11). В результате, аналогично вышеупомянутым вариантам осуществления, можно противодействовать отклонению, как ширины импульса, так и фазы напряжений vu, vv и vw ШИМ каждой фазы, обусловленному добавлением мертвого времени.
[0208] Заметим, что, согласно вышеупомянутым вариантам осуществления, устройство 100 управления компенсирует отклонение фазы напряжения ШИМ, обусловленное добавлением мертвого времени к сигналу ШИМ. Однако отклонение фазы напряжения ШИМ может происходить даже вследствие задержки, возникающей в схеме передачи сигнала, расположенной в устройстве 100 управления, или задержки отклика переключающего элемента инвертора 4, а также вследствие добавления мертвого времени.
Четвертый вариант осуществления
[0209] В связи с этим, будет описан вариант осуществления устройства управления, способного компенсировать задержку в схеме передачи сигнала ШИМ и отклонение фазы напряжения ШИМ, обусловленное задержкой отклика переключающего элемента, а также фазовую задержку, обусловленную мертвым временем.
[0210] На фиг. 10 показана блок-схема, демонстрирующая конфигурацию преобразователя 3 ШИМ согласно четвертому варианту осуществления изобретения.
[0211] Согласно этому варианту осуществления, преобразователь 3 ШИМ имеет блок 331 хранения информации задержки управления и блок 332 обработки коррекции тайминга импульсов вместо блока 33 обработки коррекции тайминга импульсов, показанного на фиг. 3. Здесь не будут описаны конфигурации других блоков, кроме блока 331 хранения информации задержки управления и блока 332 обработки коррекции тайминга импульсов, поскольку они аналогичны представленным на фиг. 3, при этом аналогичные ссылочные позиции обозначают аналогичные элементы.
[0212] На блоке 331 хранения информации задержки управления хранится информация задержки управления, представляющая времена задержки сигналов Puu и Pul возбуждения пары переключающих элементов. Согласно этому варианту осуществления, информация задержки управления содержит мертвое время tdt, время tdly_c задержки схемы передачи, используемой для передачи сигнала ШИМ, генерируемого преобразователем 3 ШИМ, и время tdly_s задержки отклика переключающего элемента инвертора 4.
[0213] Время tdly_c задержки схемы передачи представляет собой значение, заранее определенное из экспериментальных данных и пр. Схема передачи располагается между блоком 35 обработки добавления мертвого времени и инвертором 4 и включает в себя фильтр отсечки шума, оптрон и пр.
[0214] Время tdly_s задержки отклика переключающего элемента является средним значением задержки, обусловленной временем включения, и задержки, обусловленной временем отключения, и заранее определяется из экспериментальных данных и пр. Время включения это время, необходимое для включения переключающего элемента из отключенного состояния, и время отключения это время, необходимое для отключения переключающего элемента из включенного состояния.
[0215] Блок 332 обработки коррекции тайминга импульсов корректирует значение команды Du2* заполнения, подвергнутое обработке компенсации, на основании информации задержки управления. Таким образом, блок 332 обработки коррекции тайминга импульсов корректирует значение команды Du2* заполнения для компенсации отклонения фазы напряжения ШИМ на основании, по меньшей мере, одного из мертвого времени tdt, времени tdly_s задержки отклика переключающего элемента и времени tdly_s задержки отклика переключающего элемента.
[0216] Согласно этому варианту осуществления, блок 332 обработки коррекции тайминга импульсов меняет знак величины коррекции для корректировки значения команды Du2* заполнения, подвергнутого обработке компенсации, в зависимости от величины изменения ΔC треугольной волны, как выражено в следующем уравнении (12).
[0217]
Уравнение 12

[0218] Коэффициент Kdly во втором члене правой стороны уравнения (12) является величиной коррекции, и эта величина Kdly коррекции вычисляется на основании следующего уравнения (13).
[0219]
Уравнение 13

[0220] На основании уравнения (12), если величина изменения ΔC треугольной волны меньше нуля, блок 332 обработки коррекции тайминга импульсов определяет, что треугольная волна находится в периоде уменьшения. Если величина изменения ΔC треугольной волны больше нуля, блок 332 обработки коррекции тайминга импульсов определяет, что треугольная волна находится в периоде увеличения.
[0221] Если треугольная волна находится в периоде увеличения, блок 332 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения путем прибавления величины Kdly коррекции к значению команды Du2* заполнения, подвергнутому обработке компенсации, без изменения знака величины коррекции.
[0222] В противном случае, если треугольная волна находится в периоде уменьшения, блок 332 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения вычитанием величины Kdly коррекции из значения команды Du2* заполнения, подвергнутого обработке компенсации. Таким образом, если треугольная волна находится в периоде уменьшения, блок 332 обработки коррекции тайминга импульсов меняет знак величины коррекции с положительного на отрицательный.
[0223] Таким образом, блок 33 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения, меняя знак величины коррекции для корректировки значения команды Du2* заполнения между периодом увеличения и периодом уменьшения треугольной волны. Блок 33 обработки коррекции тайминга импульсов выводит скорректированное значение команды Du3* заполнения на блок 34 обработки преобразования ШИМ.
[0224] На фиг. 11 показана временная диаграмма, демонстрирующая пример, в котором преобразователь 3 ШИМ согласно этому варианту осуществления генерирует напряжение vu ШИМ U-фазы на основании значения команды Du1* заполнения U-фазы в случае, когда ток iu U-фазы имеет отрицательное значение.
[0225] Ось ординат на фиг. 11(a) - 11(h) аналогична оси ординат на фиг. 4(a) - 4(h). Кроме того, ось абсцисс на фиг. 11(a) - 11(h) является общей осью времени.
[0226] В операции управления до момента времени t40, значение команды Du1* заполнения U-фазы вычисляется, как показано на фиг. 11(c). При этом, поскольку ток iu U-фазы имеет отрицательное значение, значение команды Du2* заполнения вычисляется вычитанием величины 2KDtdt/tc коррекции из значения команды Du1* заполнения U-фазы на основании уравнения (5).
[0227] В этом случае, как показано на фиг. 11(b) и 11(c), блок 332 обработки коррекции тайминга импульсов вычисляет величину изменения ΔC вычитанием первого значения C1 счетчика из второго значения C2 счетчика на основании уравнения (7). Кроме того, блок 332 обработки коррекции тайминга импульсов определяет, меньше или больше нуля величина изменения ΔC треугольной волны.
[0228] Если величина изменения ΔC треугольной волны до момента времени t40 меньше нуля, блок 332 обработки коррекции тайминга импульсов определяет, что следующий период работы моментов времени t40 - t43 находится в периоде увеличения треугольной волны, и меняет знак величины коррекции на отрицательный.
[0229] На основании уравнения (12), блок 33 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения вычитанием величины Kdly коррекции из значения команды Du2* заполнения, подвергнутого обработке компенсации. В результате, компенсируется отклонение фазы напряжения vu ШИМ U-фазы обусловленный добавлением мертвого времени tdt, и компенсируется отклонение фазы напряжения vu ШИМ U-фазы, обусловленное задержкой управления схемы передачи и переключающего элемента.
[0230] В момент времени t40, как показано на фиг. 11(c), скорректированное значение команды Du3* заполнения, вычисленное в период уменьшения треугольной волны, сравнивается с треугольной волной. В момент времени t41, как показано на фиг. 11(d) и 11(e), уровни сигнала сигналов Puu0 и Pul0 ШИМ переключаются. Таким образом, можно приближать моменты времени переключения сигналов Puu0 и Pul0 ШИМ от момента времени переключения на основании значения команды Du1* заполнения U-фазы на время tdly задержки, полученного путем прибавления времени (tdly_c+tdly_s) задержки управления к половине мертвого времени tdt.
[0231] Затем блок 35 обработки добавления мертвого времени отдаляет момент времени роста сигнала Pul0 ШИМ от момента времени t41 на мертвое время tdt. Поэтому, как показано на фиг. 11(g), импульс сигнала Pul возбуждения растет до момента времени t42.
[0232] В момент времени, когда импульс сигнала Pul возбуждения растет, переключающий элемент нижнего каскада переходит во включенное состояние. В этом случае, как показано на фиг. 11(h), импульс напряжения vu ШИМ, подаваемого на U-фазу двигателя 6 в момент времени t42, падает вследствие задержки схемы передачи и задержки, обусловленной временем включения переключающего элемента нижнего каскада.
[0233] Таким образом, с учетом задержки схемы передачи или задержки отклика переключающего элемента, можно согласовывать момент времени спада импульса напряжения vu ШИМ U-фазы с моментом времени переключения на основании значения команды Du1* заполнения U-фазы.
[0234] В этом случае, как показано на фиг. 11(b) и 11(c), блок 332 обработки коррекции тайминга импульсов вычисляет величину изменения ΔC треугольной волны и определяет, что следующий период работы находится в периоде уменьшения треугольной волны, поскольку величина изменения ΔC треугольной волны больше нуля. Затем блок 332 обработки коррекции тайминга импульсов меняет знак величины коррекции на положительный.
[0235] Кроме того, блок 332 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3* заполнения путем прибавления величины Kdly коррекции к значению команды Du2* заполнения, подвергнутому обработке компенсации, на основании уравнения (12). В результате, скорректированное значение команды Du3* заполнения увеличивается сверх значения команды Du1* заполнения U-фазы за счет задержки схемы передачи и задержки отклика переключающего элемента.
[0236] В момент времени t43, скорректированное значение команды Du3* заполнения, вычисленное в период увеличения треугольной волны, сравнивается с треугольной волной.
[0237] момент времени t44, как показано на фиг. 11(e), уровни сигнала сигналов Puu0 и Pul0 ШИМ переключаются на L-уровень, благодаря чему, переключающий элемент нижнего каскада переходит во включенное состояние. В этом случае, как показано на фиг. 11(h), импульс напряжения vu ШИМ U-фазы растет в момент времени t45 переключения на основании значения команды Du1* заполнения U-фазы вследствие задержки схемы передачи и задержки отклика переключающего элемента нижнего каскада.
[0238] Таким образом, с учетом задержки схемы передачи или задержки отклика переключающего элемента, можно согласовывать момент времени роста импульса напряжения vu ШИМ U-фазы с моментом времени переключения на основании значения команды Du1* заполнения U-фазы.
[0239] Таким образом, за счет добавления времени tdly_c задержки схемы передачи и времени tdly_s задержки отклика переключающего элемента помимо мертвого времени tdt, момент времени переключения напряжения ШИМ U-фазы может приближаться к моменту времени переключения на основании значения команды Du1* заполнения U-фазы.
[0240] Заметим, что, хотя, согласно этому варианту осуществления, задержка управления, например, задержка схемы передачи или задержка отклика переключающего элемента, добавляется к обработке коррекции тайминга импульсов первого варианта осуществления, задержка управления, аналогичным образом, также может быть включена в обработку коррекции тайминга импульсов второго и третьего варианты осуществления.
[0241] На фиг. 12 показана блок-схема операций, демонстрирующая примерную последовательность обработки способа управления согласно этому варианту осуществления. Этот способ управления повторно выполняется в каждом периоде работы, показанном на фиг. 2.
[0242] Согласно этому варианту осуществления способа управления, каждая обработка этапов S939 и S940 добавляется вместо каждой обработки этапов S909 и S910, показанных на фиг. 5. По этой причине, здесь будет подробно описана только каждая обработка этапов S939 и S940.
[0243] Если на этапе S908 определено, что треугольная волна находится в периоде увеличения, блок 332 обработки коррекции тайминга импульсов вычисляет скорректированное значение команды Du3*, Dv3* и Dw3* заполнения на основании уравнения (12) на этапе S939. В частности, если треугольная волна находится в периоде увеличения, блок 332 обработки коррекции тайминга импульсов прибавляет величину Kdly коррекции, полученную отражением задержки управления, к значениям команды Du2*, Dv2* и Dw2* заполнения, вычисленным на этапе S907. Затем процесс переходит к этапу S911.
[0244] В результате, как показано на фиг. 11, момент времени спада сигнала Pul возбуждения приближается от момента времени t45 переключения на основании значения команды Du1* заполнения U-фазы на время задержки управления (tdly_c+tdly_s), обусловленной схемой передачи и переключающим элементом.
[0245] На этапе S940, если треугольная волна находится в периоде уменьшения, блок 332 обработки коррекции тайминга импульсов вычитает величину Kdly коррекции, полученную отражением задержки управления, из значений команды Du2*, Dv2* и Dw2* заполнения, вычисленных на этапе S907. Затем процесс переходит к этапу S911.
[0246] В результате, как показано на фиг. 11, момент времени роста сигнала Pul возбуждения приближается от момента времени переключения t42 на основании значения команды Du1* заполнения U-фазы на время задержки управления (tdly_c+tdly_s).
[0247] Согласно четвертому варианту осуществления настоящего изобретения, блок 332 обработки коррекции тайминга импульсов корректирует трехфазные значения команды Du2*, Dv2* и Dw2* заполнения на основании задержки tdly_c схемы передачи, которая передает сигнал от блока 35 обработки добавления мертвого времени на переключающий элемент инвертора 4.
[0248] Таким образом, можно уменьшить отклонение фазы напряжений vu, vv и vw ШИМ каждой фазы, обусловленное задержкой схемы передачи. Это позволяет дополнительно приближать центральный момент времени периода включения напряжения ШИМ к таймингу А/Ц преобразования.
[0249] Согласно этому варианту осуществления, блок 332 обработки коррекции тайминга импульсов корректирует трехфазные значения команды Du2*, Dv2* и Dw2* заполнения на основании задержки отклика переключающего элемента. Таким образом, блок 332 обработки коррекции тайминга импульсов корректирует значения команды Du2*, Dv2* и Dw2* заполнения каждой фазы на основании задержки отклика, обусловленной переходом из проводящего состояния в непроводящее состояние переключающего элемента, или задержки отклика, обусловленной переходом из непроводящего состояния в проводящее состояние.
[0250] Таким образом, можно уменьшить отклонение фазы напряжений vu, vv и vw ШИМ каждой фазы, обусловленное задержкой отклика переключающего элемента. Это позволяет сближать друг с другом тайминг А/Ц преобразования и центральный момент времени периода включения напряжения ШИМ и дополнительно повышать точность обнаружения тока двигателя.
[0251] Хотя выше были описаны варианты осуществления настоящего изобретения, вышеупомянутые варианты осуществления призваны лишь иллюстрировать часть применений изобретения и не призваны ограничивать технический объем изобретения конкретными конфигурациями вариантов осуществления.
[0252] Например, согласно вышеупомянутым вариантам осуществления, двигатель 6 используется в качестве примера электрического блока, возбуждаемого переменным током. Однако настоящее изобретение не ограничивается этим. Например, двигатель 6 может быть двигателем электрического насоса и т.п. или любого устройства, работающего на переменном токе.
[0253] Кроме того, согласно вышеупомянутым вариантам осуществления, настоящее изобретение применимо к устройству управления, которое управляет напряжением ШИМ, подаваемым на каждую фазу двигателя 6, обнаруживая ток, подаваемый на каждую фазу двигателя 6, и возвращая данные тока, полученные А/Ц преобразованием сигнала обнаружения. Аналогично, настоящее изобретение также может быть применимо к устройству управления, которое управляет напряжением ШИМ, подаваемым на устройство электрического двигателя, обнаруживая напряжение, подаваемое на устройство электрического двигателя, и возвращая данные напряжения, полученные А/Ц преобразованием сигнала обнаружения. В этом случае, обеспечивая детектор напряжения для обнаружения напряжения, подаваемого на двигатель 6, вместо детекторов 5u и 5v тока, можно добиться тех же функциональных результатов, что и в вышеупомянутых вариантах осуществления.
[0254] Заметим, что вышеупомянутые варианты осуществления можно надлежащим образом комбинировать.
Реферат
Изобретение относится к области электротехники. Устройство управления для управления электрическим блоком, содержащее: пару переключающих элементов, выполненных с возможностью преобразования мощности от источника питания в мощность переменного тока и подачи мощности переменного тока на электрический блок, блок преобразования, блок вычисления, блок генерирования, блок управления, блок определения, блок коррекции. Технический результат заключается в обеспечении устройства управления и способа управления, позволяющих противодействовать снижению точности обнаружения переменного тока, подаваемого на электрическую нагрузку. Достигается тем, что на основании определения, увеличивается ли амплитуда несущего сигнала или уменьшается, произведенным блоком определения, блок коррекции регулирует момент времени переключения переключающего элемента путем корректировки значения команды заполнения, вычисленного блоком вычисления. 2 н. и 8 з.п. ф-лы, 12 ил.
Комментарии