Способ компенсации низкочастотной возмущающей силы ротора с помощью активных магнитных подшипников, активный магнитный подшипник, имеющий компенсационный контур регулирования для осуществления компенсации, и применение магнитного подшипника - RU2637050C2
Код документа: RU2637050C2
Чертежи
Описание
Описание
Изобретение касается способа компенсации низкочастотного механического возмущающего колебания, которое возникает в роторе, имеющем по меньшей мере один активный магнитный подшипник (ротор на магнитной опоре). Также изобретение касается активного магнитного подшипника, имеющего компенсационный контур регулирования для осуществления компенсации. Кроме того, предлагается применение активного магнитного подшипника.
Активный магнитный подшипник (АМП) используется, например, в турбонагнетателе. Вследствие особых свойств турбонагнетателей и особых свойств магнитных подшипников может возникать следующая проблема: в зависимости от аэродинамического расчета турбонагнетателя. в его специфицированной рабочей области на ротор вследствие аэродинамических явлений могут воздействовать возмущающие силы, которые приводят к неприемлемо сильным механическим колебаниям (колебаниям с высокими амплитудами колебаний). Для защиты турбонагнетателя от повреждения при недопустимо сильных механических колебаниях турбонагнетатель отключается.
Магнитные подшипники обладают более низкой жесткостью подшипника по сравнению с подшипниками с масляной смазкой. Относительно низкая жесткость подшипника способствует возникновению механических колебаний с высокими амплитудами колебаний. Это касается, в частности, возмущающих сил с низкой частотой возмущения (частотой возбуждения). Так, например, известное гидродинамическое явление «rotating diffuser stall» (англ. вращающийся срыв в диффузоре) соответствует описанным выше условиям, и у турбонагнетателей, имеющих магнитные подшипники, может приводить к недопустимо высоким амплитудам.
Задачей настоящего изобретения является показать, как может подавляться возникновение недопустимо сильных механических колебаний в активном магнитном подшипнике.
Для решения задачи предлагается способ компенсации по меньшей мере одного низкочастотного механического возмущающего колебания, которое создается в роторе активного магнитного подшипника вследствие воздействия на ротор возмущающей силы. Это механическое возмущающее колебание имеет частоту возмущающего колебания меньше 100 Гц. Способ содержит следующие шаги:
a) анализ низкочастотного механического возмущающего колебания, которое приводит к некоторому результату анализа возмущающей силы;
b) определение компенсационной силы на основе результата анализа возмущающей силы для создания в роторе механической компенсационной силы, противодействующей механическому возмущающему колебанию; и
c) создание в роторе механического компенсационного колебания, противодействующего механическому возмущающему колебанию, путем приложения этой компенсационной силы к ротору, при этом шаги a), b) и c) осуществляются с помощью по меньшей мере одного компенсационного контура регулирования активного магнитного подшипника, разъединенного с контуром регулирования магнитного подшипника для регулирования активного магнитного подшипника.
Для решения задачи предлагается также активный магнитный подшипник, имеющий ротор, по меньшей мере один контур регулирования магнитного подшипника для регулирования активного магнитного подшипника и по меньшей мере один разъединенный с контуром регулирования магнитного подшипника компенсационный контур регулирования для компенсации по меньшей мере одного низкочастотного механического возмущающего колебания. Механическое возмущающее колебание может создаваться в роторе активного магнитного подшипника вследствие воздействия на ротор возмущающей силы. При этом механическое возмущающее колебание имеет частоту возмущения, которая ниже частоты вращения ротора.
С помощью компенсационного контура регулирования амплитуда механического возмущающего колебания, вызванного в роторе (вале) возмущающей силой, снижается. При этом механическое возмущающее колебание может гаситься частично или практически полностью.
Максимальная амплитуда A(ωχ) возмущающего колебания, имеющего частоту ωχ возмущения, снижается до значения ниже допустимого предельного значения.
Например, возмущающая сила представляет собой аэродинамическую возмущающую силу, действующую снаружи. Такая аэродинамическая возмущающая сила представляет собой низкочастотное внешнее возмущение в смысле «вынужденного колебания». Аэродинамическая возмущающая сила действует на систему ротор/подшипник и создает в роторе механическое возмущающее колебание. Для компенсации этого низкочастотного возмущения предлагается посредством дополнительной настройки магнитного подшипника, не зависимой от контура регулирования магнитного подшипника, прикладывать к ротору компенсационные силы, которые целенаправленно противодействуют возмущающим силам и при этом препятствуют возникновению больших амплитуд колебаний в роторе. Для целенаправленного подключения компенсационных сил применяется надлежащий алгоритм, который рассчитывает эти компенсационные силы по величине, фазовому углу и частоте так, что амплитуды колебаний в соответствующем частотном диапазоне снижаются.
Основополагающая идея изобретения заключается в том, чтобы применять для компенсации или, соответственно, демпфирования возмущающего колебания не контур регулирования магнитного подшипника, а отдельный компенсационный контур регулирования. Контур регулирования магнитного подшипника и компенсационный контур регулирования разъединены друг с другом, т.е. являются разделенными (отдельными). Благодаря этому разделению может снижаться негативное воздействие компенсации возмущающего колебания без негативного влияния на свойства контура регулирования магнитного подшипника.
При этом разделение или, соответственно, разъединение контура регулирования магнитного подшипника и компенсационного контура регулирования означает, что для компенсационного контура регулирования вполне могут использоваться имеющиеся элементы контура регулирования магнитного подшипника, напр., сенсоры, усилители или актуаторы и их выходные величины.
Свойства магнитной опоры при имеющихся низкочастотных возмущающих силах значительно способствуют возникновению высоких (волновых) колебаний. Эти свойства магнитной опоры, в свою очередь, определяются по существу расчетом контура регулирования магнитного подшипника, а также динамическими свойствами применяемых компонентов аппаратного обеспечения.
При расчете контура регулирования магнитного подшипника необходимо позаботиться о приемлемом в целом поведении всей системы. Это относится, в частности с учетом свойств магнитного подшипника, в том числе жесткости магнитного подшипника, к диапазону частот вращения от прибл. 100 Гц до прибл. 1000 Гц, так что одна только оптимизация контура регулирования магнитного подшипника с точки зрения максимальной жесткости подшипника в диапазоне частот возмущения от прибл. 1 Гц до прибл. 50 Гц была бы нецелесообразна.
Для оптимизации расчета контура регулирования магнитного подшипника часто так называемые фильтровые модули используются с целью повышения или понижения усиления электрического сигнала контура регулирования в относительно узком частотном диапазоне. Но так как вследствие встраивания фильтровых модулей в контур регулирования магнитного подшипника, наряду с усилением или, соответственно, ослаблением сигнала, изменяется также его фазовый угол, такого рода фильтровые модули обладают только ограниченными возможностями использования с точки зрения достижения в целом приемлемого поведения всей системы. С помощью изобретения можно, по меньшей мере, частично обойтись без использования фильтровых модулей для контура регулирования магнитного подшипника с целью оптимизации расчета контура регулирования магнитного подшипника.
Предлагается повторять или, соответственно, осуществлять способ во время эксплуатации магнитного подшипника через регулярные интервалы времени или же постоянно. Вследствие повторяющегося или, соответственно, постоянного осуществления способа обеспечено, что во время эксплуатации в роторе, имеющем магнитные подшипники, не возникают нежелательно сильные механические возмущающие колебания. Поэтому по одному из особенных вариантов осуществления шаги a) и b) повторно осуществляются во время рабочей фазы магнитного подшипника.
Анализ низкочастотного механического возмущающего колебания, определение компенсационной силы, а также создание и приложение механической (или, соответственно, электромагнитной) компенсационной силы, противодействующей механическому возмущающему колебанию, могут, в принципе, осуществляться с помощью одного общего алгоритма. Но предпочтительно обрабатывать эти отдельные шаги отдельно друг от друга. Поэтому по одному из особых вариантов осуществления шаги a), b) и/или c) осуществляются с помощью различных алгоритмов. Возможно также использование одного алгоритма, имеющего разные части для обработки шагов a), b) и/или c).
По другому варианту осуществления для анализа низкочастотного возмущающего колебания осуществляется частотный анализ сигнала времени отклонения ротора. Частотный анализ осуществляется, в частности, с помощью FFT (Fast Fourier Transformation, англ. БПФ, быстрое преобразование Фурье).
С помощью этого способа компенсируется или, соответственно, демпфируется низкочастотное возмущающее колебание. При этом в принципе, возможно покрытие широкого частотного спектра. Предпочтительно частотный анализ осуществляется для частотного спектра (полосы частот) из частотного диапазона от 1 Гц до 50 Гц и, в частности, из частотного диапазона от 1 Гц до 30 Гц, и также, в частности, из частотного диапазона от 1 Гц до 20 Гц. Возмущающие колебания именно из этих частотных диапазонов могут вызывать очень высокие, неприемлемые амплитуды колебаний. С помощью изобретения такие высокие амплитуды колебаний снижаются.
Для анализа возмущающего колебания могут использоваться разные параметры возмущающего колебания, или, соответственно, также осуществляться различные оценки параметров колебания. По одному из особых вариантов осуществления для анализа низкочастотного возмущающего колебания осуществляются определение амплитуды Ap возмущения возмущающего колебания и сравнение определенной амплитуды Ap возмущения и стандартной предельной амплитуды Alim. Эти амплитуды соответствуют, например, радиальному отклонению ротора. Радиальное отклонение составляет, например, несколько мкм.
При сравнении друг с другом определенной амплитуды Ap возмущения и стандартной предельной амплитуды Alim, в частности, устанавливается, будет ли амплитуда Ap возмущения меньше, равна или больше стандартной предельной амплитуды Alim. Сравнение осуществляется, например, путем составления частного определенной амплитуды Ap возмущения и стандартной предельной амплитуды Alim.
В случае если амплитуда Ap возмущения равна или больше стандартной предельной амплитуды Alim, осуществляется определение фазового угла φp возмущающего колебания. Определенный фазовый угол φp и/или амплитуда Ap возмущения, а также частота ωχ возмущения возмущающего колебания используются в качестве входных величин компенсационного контура регулирования. Фазовый угол φp и/или амплитуда Ap возмущения используются для определения компенсационной силы или, соответственно, компенсационного колебания.
Активный магнитный подшипник может использоваться во многих областях техники, причем в частности там, где необходима невибрирующая опора чувствительных компонентов. Примерами этого являются турбомашины, вентиляторы, холодильные машины, вакуумные насосы и инструментальные шпиндели на магнитной опоре.
В частности, активный магнитный подшипник находит применение в турбонагнеталелях. Поэтому в соответствии с другим аспектом изобретения предлагается применение активного магнитного подшипника в турбонагнетателе (турбокомпрессоре), при этом ротор турбонагнетателя опирается с помощью активного магнитного подшипника.
Изобретение описывается подробнее ниже с помощью одного из примеров осуществления и соответствующей ему фигуры.
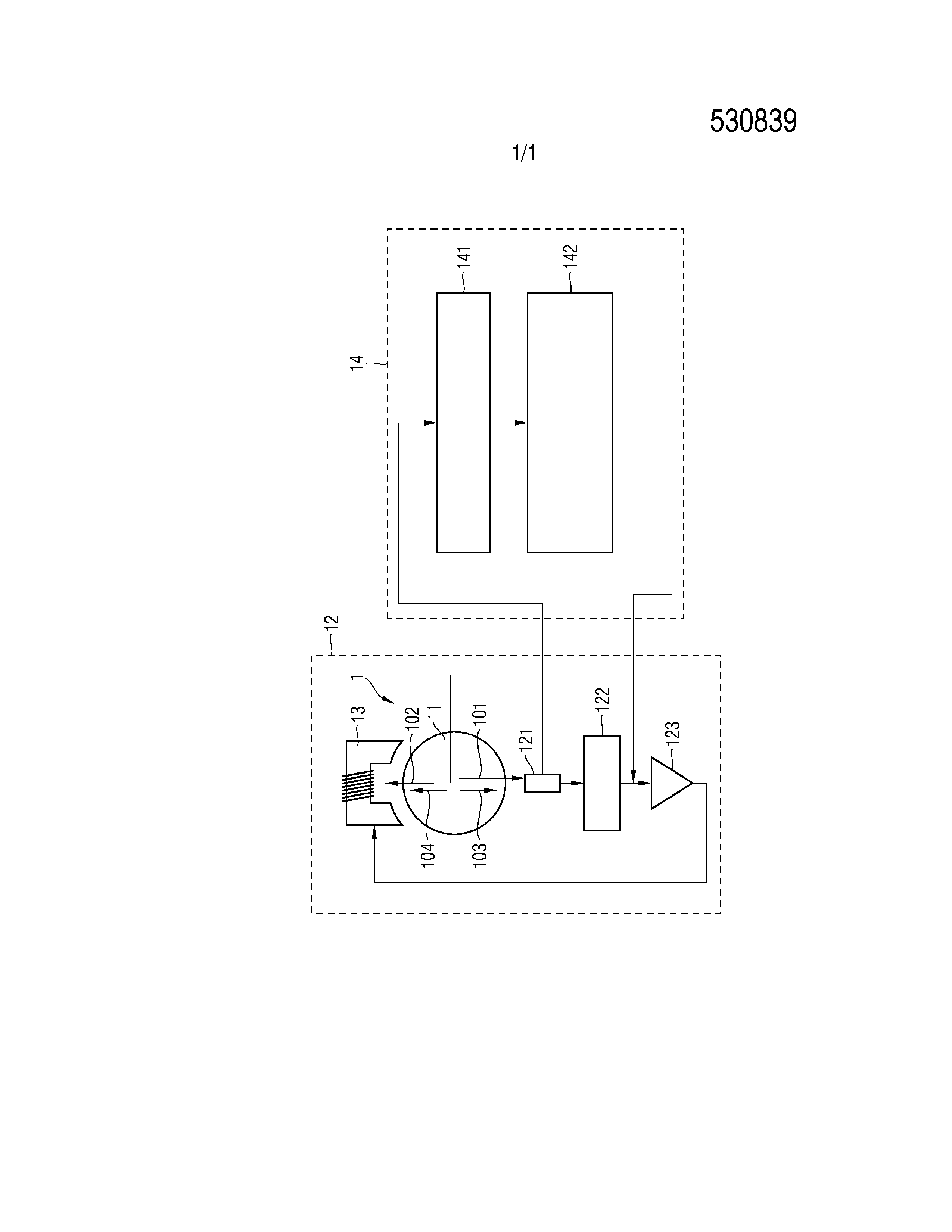
На чертеже схематично показан активный магнитный подшипник, имеющий предусмотренные контуры регулирования.
Имеется активный магнитный подшипник 1 турбонагнетателя. Активный магнитный подшипник 1 имеет ротор 11, а также замкнутый контур 12 регулирования магнитного подшипника для регулирования активного магнитного подшипника 1.
Наряду с этим имеется разъединенный с контуром 12 регулирования магнитного подшипника компенсационный контур 14 регулирования для компенсации низкочастотного механического колебания, которое может создаваться в роторе 11 активного магнитного подшипника 1 вследствие воздействия на ротор 11 возмущающей силы 103. Механическое возмущающее колебание имеет частоту возмущения ниже частоты вращения ротора 11.
С помощью статора (обозначен электромагнитом 13) образуется магнитный подшипник 1. Ротор 11 бесконтактно опирается с помощью магнитного подшипника 1 в статоре 13 (ротор на магнитной опоре). Регулирование бесконтактной опоры осуществляется с помощью контура 12 магнитного подшипника. Компонентами контура 12 магнитного подшипника являются, в частности, так называемый сенсор 121 смещения (сенсор положения, сенсор перемещения), который регистрирует изменение положения ротора 11, а также блок контроля (контроллер) 122 и усилитель 123 сигнала (англ. power amplifier, усилитель мощности).
При эксплуатации магнитного подшипника 1 на ротор 11 действуют разные силы. Этими силами являются, в частности, сила 101 гравитации и электромагнитная сила 102. Сила 101 гравитации и электромагнитная сила 102 в соответствии с фигурой направлены противоположно друг другу.
Наряду с силой 101 гравитации и электромагнитной силой 102 на ротор 11 может действовать внешняя низкочастотная возмущающая сила 103. Возмущающая сила 103 представляет собой аэродинамическую возмущающую силу. Эта возмущающая сила периодически действует на ротор 11 и при этом вызывает в роторе 11 механическое низкочастотное возмущающее колебание. Это низкочастотное возмущающее колебание имеет частоту ωχ возмущения ниже 50 Гц.
Для компенсации низкочастотного возмущающего колебания, вызванного в роторе 11 активного магнитного подшипника 1 вследствие воздействия возмущающей силы 103, осуществляются следующие шаги:
a) анализ низкочастотного механического возмущающего колебания, которое приводит к некоторому результату анализа возмущающей силы;
b) определение компенсационной силы 104 на основе результата анализа возмущающей силы для создания в роторе 11 механической компенсационной силы, противодействующей механическому возмущающему колебанию; и
c) создание в роторе 11 компенсационной силы 11.
При этом шаги a), b) и c) осуществляются с помощью компенсационного контура 14 регулирования активного магнитного подшипника 1, разъединенного с контуром 12 регулирования магнитного подшипника для регулирования активного магнитного подшипника 1.
Для этого способа используются два алгоритма или, соответственно, один алгоритм, имеющий две части: с помощью части 1 (ссылочное обозначение 141) реализуется шаг a). Речь идет о распознавании высоких отклонений в низком частотном диапазоне.
Для этого анализ низкочастотного механического колебания включает в себя анализ спектра в области низких частот ω (ωmin<ω<ωmax). ωmin составляет, например, 1 Гц, а ωmax 50 Гц.
Для анализа низкочастотного колебания возмущающей силы осуществляется частотный анализ сигнала времени отклонения ротора (напр., 20 мкм). Для частотного анализа используется БПФ.
С помощью частотного анализа определяются амплитуды Apx возмущения. При сравнения определенных амплитуд Apx возмущения и стандартной предельной амплитуды Alim устанавливается, будет ли амплитуда Apx возмущения меньше, равна или больше стандартной предельной амплитуды Alim. Осуществляется опрос, превышают ли амплитуды Apx возмущения допустимое предельное значение Alim.
В случае если амплитуда Ap возмущения больше допустимого предельного значения Alim, осуществляются следующие шаги:
i) определение фазового угла и частоты максимальной величины отклонения ротора (возмущающего колебания) в исследуемом частотном диапазоне;
ii) передача этих значений A(ωχ) (амплитуды) и φ (ωx) (фазового угла) при частоте ωxв алгоритм, часть 2 (ссылочное обозначение 142, см. ниже).
В случае если амплитуды Ap возмущения меньше допустимого предельного значения Alim, никакое дальнейшее действие не производится.
Шаги i) и ii) осуществляются, повторяясь, во время эксплуатации магнитного подшипника 1 (рекурсивное осуществление шагов способа).
В соответствии с алгоритмом, часть 2, применяется способ, который снижает определенную в частотном диапазоне ωmin < ω < ωmax максимальную амплитуду A(ωχ) до значения ниже допустимого предельного значения Alim.
С этой целью определяется необходимая для этого компенсационная сила 104. Для определения компенсационной силы 104 определяется имеющая частоту магнитная сила fkomp(ωx) и фаза pf (ωx) при одинаковой частоте ωχ (соответствующей частоте возмущающего колебания).
Определенная таким образом магнитная сила передается в регулирующие воздействия компенсационного контура регулирования и подключается к усилителю 123. Затем к ротору 11 посредством электромагнита 13 прикладывается компенсационная сила 104 в виде механического компенсационного колебания. Приложенное механическое компенсационное колебание направлено противоположно механическому возмущающему колебанию и приводит к демпфированию механического возмущающего колебания.
Активный магнитный подшипник, а также способ компенсации низкочастотных механических колебаний находят применение в турбонагнетателе.
Реферат
Изобретение касается способа компенсации по меньшей мере одного низкочастотного механического возмущающего колебания, которое создается в роторе (11) активного магнитного подшипника (1) вследствие действия на ротор (1) возмущающей силы (103). Механическое возмущающее колебание имеет частоту возмущающего колебания ниже частоты вращения ротора (11). Способ включает в себя следующие шаги: a) анализ низкочастотного механического возмущающего колебания, b) определение компенсационной силы (104) для создания в роторе (1) механической компенсационной силы, противодействующей механическому возмущающему колебанию, и c) приложение этой компенсационной силы к ротору (11), при этом шаги a), b) и c) осуществляются с помощью по меньшей мере одного компенсационного контура (14) регулирования активного магнитного подшипника (1), разъединенного с контуром (12) регулирования магнитного подшипника для регулирования активного магнитного подшипника (1). Кроме того, предлагается соответствующий активный магнитный подшипник (1), имеющий ротор (11), по меньшей мере один контур (12) для регулирования активного магнитного подшипника (1) и по меньшей мере один разъединенный с контуром (12) компенсационный контур (14) регулирования для компенсации по меньшей мере одного низкочастотного механического возмущающего колебания. Активный магнитный подшипник (1), а также способ находят применение в турбонагнетателе. Технический результат: снижение возмущающей силы, при этом механическое возмущающее колебание может гаситься частично или практически полностью. 3 н. и 7 з.п. ф-лы, 1 ил.
Комментарии