Линейно-цепной электродвигатель - RU2736775C1
Код документа: RU2736775C1
Чертежи
Описание
Настоящее изобретение относится к электротехнике и может быть использовано, преимущественно, в транспортных средствах (электрические велосипеды, мотоциклы, квадроциклы и т.п.), а также в нефтяной и газодобывающей отраслях, где активно используются мощные приводные цепи, в станкостроении, в производстве компрессорных установок, где низкий крутящий момент выходного вала электродвигателя при помощи ремня или цепи передается на маховик со шкивом или звездочкой большого диаметра для увеличения крутящего момента.
Известно устройство для линейного перемещения [RU 2351817, C1, F16H 1/34, 10.04.2009], содержащее электродвигатель, контроллер, управляющий движением двигателя, передачу, включающую ходовую и опорные гайки и резьбовой ролик, который жестко соединен с ферромагнитными катящимися роторами, обмотки статора и постоянные магниты, обеспечивающие создание вращающегося асимметричного магнитного поля, жестко соединены с опорными гайками, опорные участки ролика имеют резьбовые сопряжения с опорными гайками, у которых углы подъема резьбы одинаковы по величине и противоположны по знаку, причем, ходовая гайка имеет резьбовое сопряжение с ходовым участком ролика при разных углах подъема резьбы на ходовой гайке и ходовом участке ролика.
Недостатком устройства является относительно большие потери при преобразовании вращательного движения в линейное.
Наиболее близким по технической сущности к предложенному является линейный электродвигатель [RU 2543512, C1, H02K 41/02, 10.03.2015], содержащий статор, состоящий из магнитного корпуса, внутри которого между левым и правым магнитными полюсами установлены намагничивающие катушки, промежуточные полюса закреплены немагнитными вставками на резьбе, между правым магнитным полюсом одной катушки и левым магнитным полюсом другой катушки располагаются немагнитные кольца, закрепленные штифтами, торцевой магнитный полюс крепится к магнитному корпусу болтом, якорь линейного электродвигателя состоит из магнитных и немагнитных колец, насаженных в чередующейся последовательности на немагнитный стержень, форма сечения торцов правых магнитных полюсов и левой части промежуточных полюсов, а также торцевого полюса имеет вид неправильной трапеции, форма сечения торцов левых магнитных полюсов и правой части промежуточного полюса имеет вид прямоугольного треугольника, форма сечения левых торцов магнитных колец якоря имеет вид неправильного прямоугольника, а правых торцов - прямоугольного треугольника
Недостатком наиболее близкого технического решения является относительно узкие функциональные возможности, поскольку обеспечивается только ограниченное линейное перемещении исполнительных элементов, а стремление преобразования линейного перемещения во вращательное приводит к большим потерям энергии при преобразовании и снижению коэффициента полезного действия.
Задача, которая решается в изобретении, направлена на создание такой конструкции электродвигателя, в которой используется свойство группы прилегающих друг к другу катушек индуктивности образовывать составной соленоид, внутри которого индукция магнитного поля в 2 раза выше, чем на выходе. При этом можно получать управляемое линейное движение или торможение ферромагнитного якоря. Используя в качестве якоря цепь или ремень особой конструкции, через звездочки или шкивы линейное движение можно преобразовать во вращательное движение, востребованное в транспортных средствах, станках и другом оборудовании. Такая конструкция расширит арсенал технических средств, используемых в качестве электродвигателей.
Требуемый технический результат заключается в расширении арсенала технических средств, используемых в качестве электродвигателей, с одновременным уменьшением потерь энергии при обеспечении, по крайней мере, двух вращательных движений.
Требуемый технический результат достигается предлагаемой конструкцией линейно-цепного электродвигателя, обеспечивающего непрерывное движение звеньев цепи особой конструкции в требуемом направлении с регулируемым тяговым усилием, торможение с рекуперацией части кинетической энергии в электрическую и обеспечивающего преобразование линейного перемещения приводной цепи, в, по крайней мере, два вращательных движения, что позволит получать высокий крутящий момент на звездочках большого диаметра и высокую угловую скорость на звездочках малого диаметра, снизит потери энергии по сравнению с традиционными роторными электродвигателями, у которых часть энергии расходуется на паразитную радиальную составляющую силы взаимодействия полюсов статора и ротора, а также расширит арсенал технических средств, используемых в качестве электродвигателей.
Поставленная задача решается, а требуемый технический результат достигается тем, что линейно-цепной электродвигатель содержит орган управления, источник электропитания, контроллер, датчик положения и цепную передачу в виде, по крайней мере, двух разнесенных ведомых звездочек, соединенных цепью из последовательно чередующихся групп звеньев, в одной из которых звенья выполнены из ферромагнитного материала, а в другой – из немагнитного материала, при этом прямолинейный участок цепи между звездочками установлен с зазором в пластиковой гильзе, вокруг которой последовательно размещены катушки индуктивности, входные зажимы которых подключены к выходным зажимам контроллера, выполненного с возможностью подачи напряжения на входные зажимы катушек индуктивности в соответствии с требуемым режимом работы.
Сущность изобретения поясняется чертежом на примере цепи, с чередующимися группами ферромагнитных звеньев и немагнитных звеньев.
На чертеже представлены:
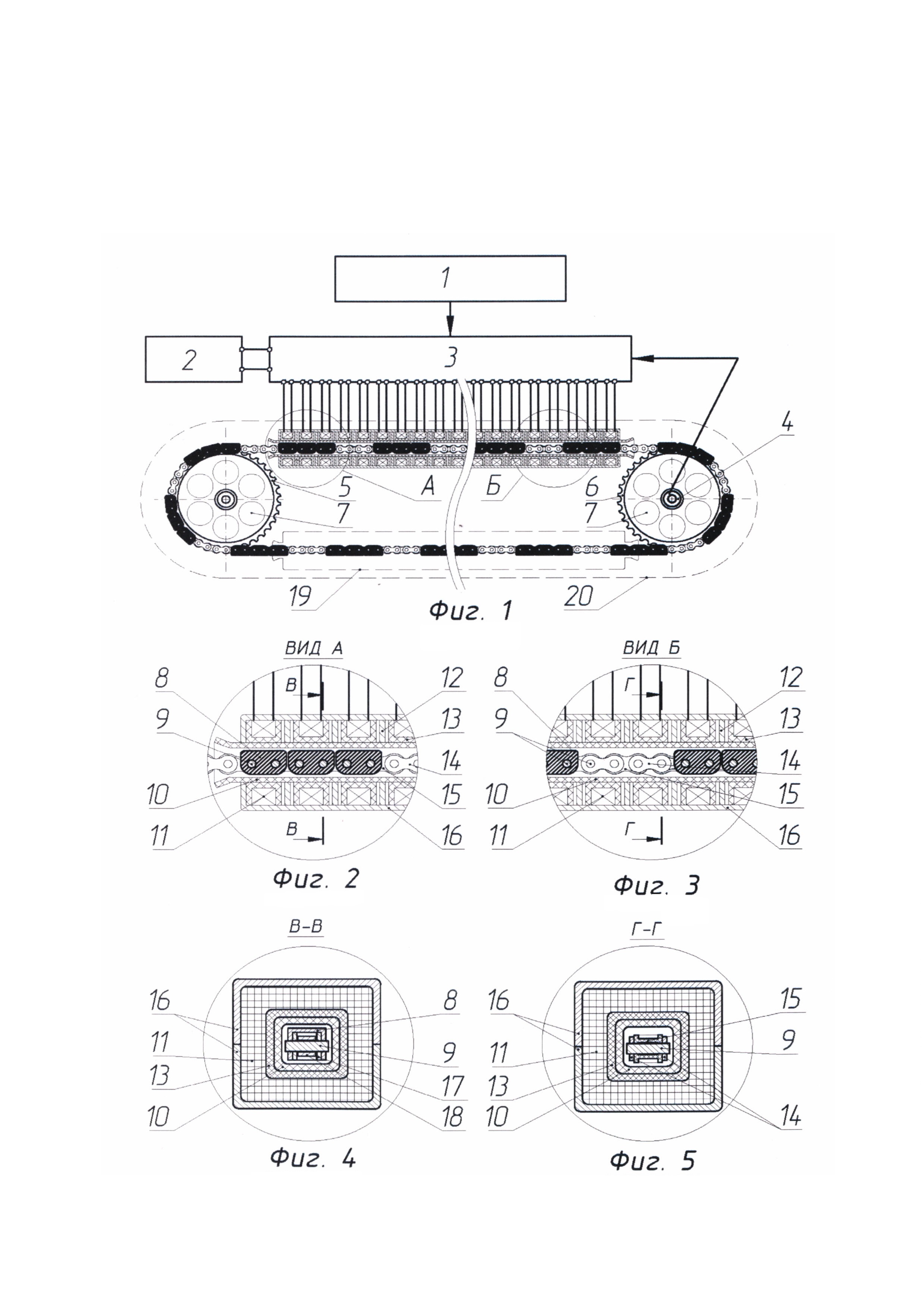
на фиг. 1 - общая функциональная схема линейно-цепного электродвигателя;
на фиг. 2 - укрупненный фрагмент конструкции с группой ферромагнитных звеньев;
на фиг. 3 - укрупненный фрагмент конструкции с группой немагнитных звеньев;
на фиг. 4 - поперечное сечение ферромагнитного звена;
на фиг. 5 - поперечное сечение немагнитного звена.
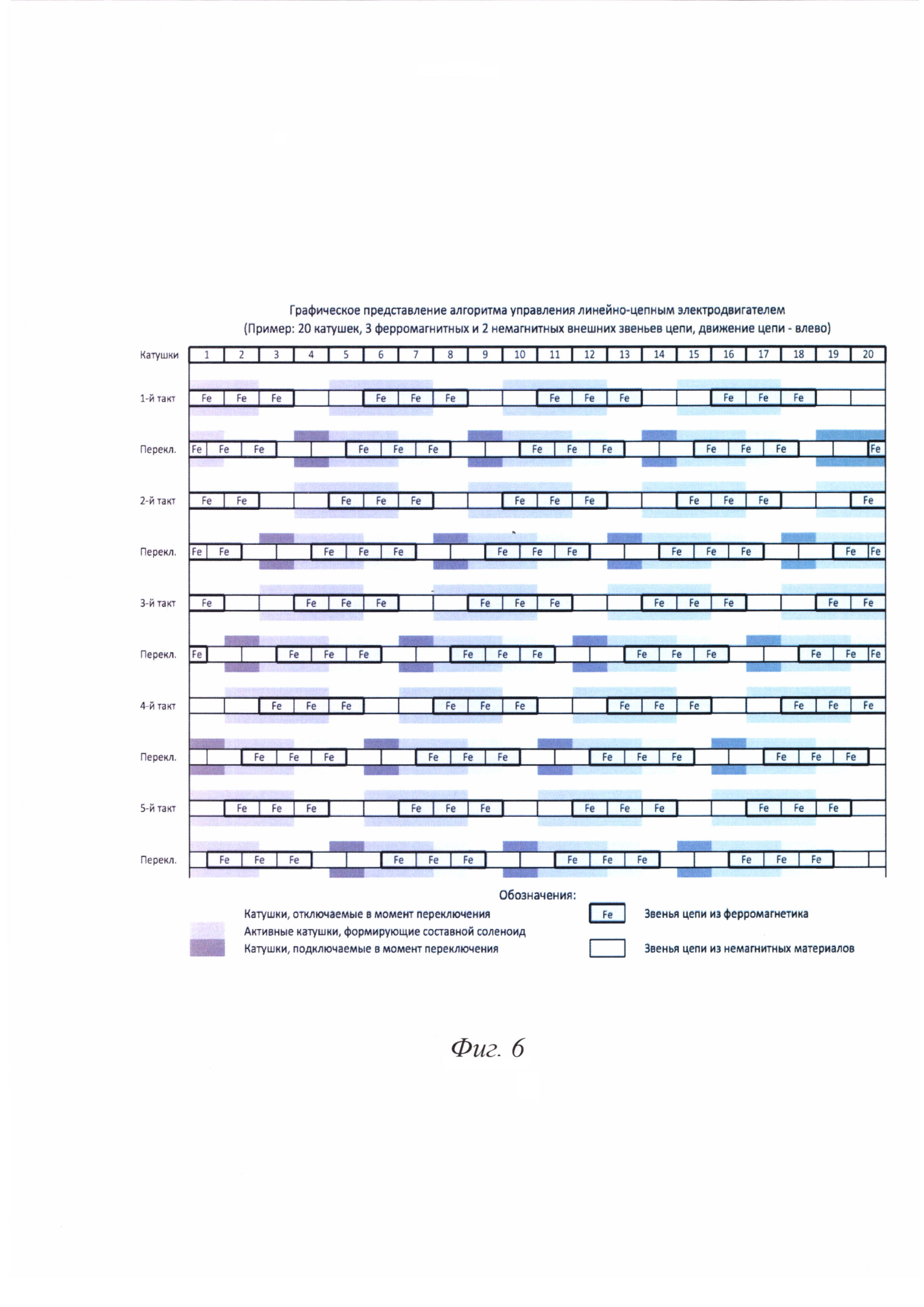
на фиг. 6 - графическое представление алгоритма управления линейно-цепным электродвигателем (пример: 20 катушек индуктивности, 3 ферромагнитных и 2 немагнитных внешних звеньев цепи, движение цепи - влево).
На чертеже обозначены:
1 - орган управления;
2 - источник электропитания;
3 - блок управления (контроллер);
4 - датчик углового положения (энкондер);
5 - зубчатое колесо (звездочка) №1
6 - зубчатое колесо (звездочка) №2
7 - вырезы (пустоты) произвольной формы (в пределах избыточной прочности) в теле ведомых звездочек;
8 - внешнее ферромагнитное звено;
9 - стальной валик (иногда называют штифт, пин);
10 - пластиковая гильза;
11 - обмотка катушки индуктивности;
12 - стальная шайба или пакет шихтованных пластин электротехнической стали;
13 - корпус катушки индуктивности;
14 - внешнее немагнитное звено;
15 - внутреннее немагнитное звено;
16 - внешний стальной корпус блока катушек индуктивности;
17 - внутреннее ферромагнитное звено;
18 - стальной ролик;
19 - дополнительный блок катушек индуктивности;
20 - внешний герметичный корпус;
Линейно-цепной электродвигатель содержит орган управления 1, источник электропитания 2, блок управления (контроллер) 3, датчик углового положения (энкондер) 4 и цепную передачу в виде, по крайней мере, двух разнесенных первой 5 и второй 6 ведомых звездочек, соединенных цепью из последовательно чередующихся групп звеньев, в одной из которых звенья 8 выполнены из ферромагнитного материала, а в другой звенья 14 выполнены из немагнитного материала (на чертеже представлен пример с чередующимися группами ферромагнитных (3 внешних, 2 внутренних звеньев) и немагнитных (2 внешних, 3 внутренних звеньев), но в конструкции допускается и иное количество звеньев и катушек индуктивности, а также количество ведомых звездочек и их диаметров).
В линейно-цепном электродвигателе на прямолинейном участке цепи между ведомыми звездочками установлена с зазором пластиковая гильза 10, вокруг которой последовательно размещены катушки индуктивности 11, входные зажимы которых подключены к выходным зажимам контроллера 3, выполненного с возможностью подачи напряжения на входные зажимы катушек индуктивности 11 по заложенным алгоритмам.
Особенностями линейно-цепного электродвигателя является то, что, орган управления 1 задает режим работы (вперед, назад, торможение и интенсивность этих режимов) электродвигателя и выдает управляющие электрические сигналы контроллеру 3, который по описанным ниже алгоритмам управляет движением цепи на ее линейном участке, а ведомые звездочки позволяют получать на валах механическую мощность вращательного движения.
Источник электропитания 2 представляет собой источник электрической энергии, в транспортных средствах это, как правило, аккумуляторная батарея и ионисторы (суперконденсаторы).
Указанный на чертеже фиг. 1 сигнал датчика углового положения 4 является электрическим сигналом контроллеру 3 о положении звеньев цепи по отношению к катушкам индуктивности. В рассмотренном примере конструктивного выполнения это может быть энкондер (датчик углового положения), но возможны другие варианты.
При использовании энкондера число зубьев звездочек должно быть кратным числу валиков 9 группы ферромагнитных и немагнитных звеньев цепи. В приведенном примере цепи это могут быть 10, 20, 30 и т.д. зубьев.
Контроллер 3 по сигналам от органа управления 1, датчика положения 4 и по заложенным алгоритмам через силовые ключи подает напряжение на соответствующие катушки 11 индуктивности в требуемой последовательности.
Вырезы (пустоты) 7 произвольной формы (в пределах избыточной прочности) в теле ведомых звездочек 5, 6 позволяют снизить массу конструкции и момент инерции ведомых звездочек 5, 6.
Внешнее ферромагнитное звено 8 в сечении представляет собой П-образную скобу. Так как сила втягивания сердечника, называемого по традиции якорем (в нашем случае это группа ферромагнитных звеньев), пропорциональна МДС (магнитодвижущая сила = ампер х витки) и массе якоря, то варьируя толщиной стенок этой П-образной скобы можно достигать нужной массы «железа». В мощных цепях, имеющих большую массу, применение такой скобы может быть не обязательным. Возникающее при этом утяжеление ферромагнитных участков цепи компенсируется снижением массы немагнитных участков, где могут применяться легкие немагнитные сплавы, композиты, полимеры. Масса таких цепей существенно ниже стандартных стальных.
Внешний стальной корпус 16 блока катушек индуктивности, для удобства сборки состоящий из двух половин, принимает на себя внешние воздействия и силу противодействия движения цепи, поэтому должен быть надежно прикреплен к корпусу (раме) механизма. Кроме того, вместе со стальными шайбами или пакетами шихтованных пластин электротехнической стали 12, внешний стальной корпус 16 выполняет функцию электротехнического ярма.
Дополнительный блок 19 катушек индуктивности не является обязательным, но рекомендуется при необходимости повышения мощности устройства и может быть выполнен аналогично представленному в верхней части фиг. 1 для увеличения тягового усилия и размещенный со сдвигом так, что на момент переключения катушек одного блока, в другом блоке катушки находились бы в положении максимальной силы втягивания (в рассмотренном примере сдвиг равен

Устройство может быть помещено в не обязательный, но рекомендуемый, внешний герметичный корпус 20 для защиты от попадания абразивных частиц извне. Рекомендуется также наполнять корпус 20 некоторым количеством трансформаторного или моторного масла для снижения трения и охлаждения конструкции, предусмотрев в корпусе заливное и сливное отверстия с магнитной пробкой для сбора металлических опилок. Также рекомендуется перед одной из ведомых звездочек устанавливать натяжитель цепи (на чертеже не показан).
Может быть рассмотрен вариант применения не цепного, а ременного привода. В этом случае в армированный резиновый ремень в качестве корда вплетены участки стального гибкого троса, а вместо звездочек используются шкивы.
Работает линейно-цепной электродвигатель следующим образом.
Графическое представление примера алгоритма управления линейно-цепного электродвигателя приведено на фиг. 6. Этот алгоритм показывает последовательность включения катушек индуктивности 11 для создания втягивающего составного соленоида при движении цепи влево. Поскольку наибольшая сила втягивания возникает, когда якорь вошел в соленоид более чем наполовину, а максимума достигает при погружении в соленоид на 2/3, то данный алгоритм активизирует катушки индуктивности, находящиеся в диапазоне погружения якоря от 1/2 до 5/6 (т.е. от 50% до 83,3%). Таким образом, используется наиболее эффективный участок.
Регулирование силы втягивания и, соответственно, крутящего момента на валах звездочек, производится путем изменения силы тока в катушках, формирующих составной соленоид. Сила тока задается контроллером 3 с использованием, например, широтно-импульсной модуляции (ШИМ).
Реверсивное (обратное) движение цепи задается алгоритмом, в котором катушки индуктивности активизируются в противоположном порядке.
Торможение двигателя, с рекуперацией части кинетической энергии в электрическую, основано на том, что движущиеся намагниченные звенья цепи создают изменяющееся магнитное поле, что по закону Фарадея порождает в катушках индуктивности ЭДС электромагнитной индукции. Возникающий при этом электрический ток контроллер направляет в ионистор и аккумуляторную батарею.
Таким образом, в изобретении достигается требуемый технический результат, заключающийся в снижении потерь энергии и расширении арсенала технических средств, используемых в качестве электродвигателей на основе использования электромагнитных свойств соленоидов, обеспечивающих линейное движение или торможение якоря (цепи, ремня) особой конструкции, при преобразовании линейного движения во вращательное, по крайней мере, на двух валах.
Реферат
Изобретение относится к электротехнике. Технический результат - расширении арсенала технических средств, используемых в качестве электродвигателей, и в снижении потерь энергии. Линейно-цепной электродвигатель содержит орган управления, источник электропитания, контроллер, датчик положения и цепную передачу в виде, по крайней мере, двух разнесенных ведомых звездочек, соединенных цепью из последовательно чередующихся групп звеньев, в одной из которых звенья выполнены из ферромагнитного материала, а в другой – из немагнитного материала. Прямолинейный участок цепи между звездочками установлен с зазором в пластиковой гильзе, вокруг которой последовательно размещены катушки индуктивности, входные зажимы которых подключены к выходным зажимам контроллера, выполненного с возможностью последовательной подачи напряжения на входные зажимы катушек индуктивности в требуемом направлении движения или торможения цепи. Отбор механической мощности вращения может происходить, по крайней мере, на двух валах ведомых звездочек. 6 ил.
Комментарии