Вращательное устройство и привод вращения (варианты) - RU2568343C1
Код документа: RU2568343C1
Чертежи
















































Описание
Предпосылки к созданию изобретения
Мотор в транспортном средстве типично расположен в центральной части транспортного средства, например, впереди пассажирского салона транспортного средства. Расположенный по центру мотор приводит во вращение колеса транспортного средства через приводные валы, кардан и другие компоненты. Такие моторы могут быть, например, топливными моторами или электромоторами. Моторы также могут быть расположены у колес или даже в колесах транспортного средства. Такие моторы называют мотор-колесами, причем обычно они являются электромоторами. Транспортное средство с четырьмя колесами может иметь, например, четыре мотор-колеса, по одному мотор-колесу на каждое колесо.
Раскрытие изобретения
При возрастании интереса к электрическим транспортным средствам, в том числе и к гибридным транспортным средствам, возрастает интерес к мотор-колесам. Однако мотор-колеса, подходящие для транспортных средств, до настоящего времени еще не разработаны. Типичная проблема, связанная с мотор-колесом, заключается в том, что первичная масса мотор-колеса не поддерживается компонентами подвески транспортного средства и поэтому способствует повышению неподрессоренной массы транспортного средства. За счет использования совершающей возвратно-поступательное движение обмотки мотора для привода во вращение колеса относительно ступицы более тяжелые компоненты мотора могут поддерживаться в подрессоренной массе транспортного средства, что приводит к улучшению движения транспортного средства и управления им. В самом деле, обмотка сама может служить компонентом подвески.
Вращательное устройство может содержать узел магнитного статора, противоположные электромагнитные исполнительные механизмы и линейно-вращательный преобразователь. Каждый электромагнитный исполнительный механизм содержит совершающую возвратно-поступательное движение обмотку, которая совершает возвратно-поступательное движение относительно узла магнитного статора. Электромагнитные исполнительные механизмы связаны с линейно-вращательным преобразователем и за счет возвратно-поступательного движения приводят линейно-вращательный преобразователь во вращательное движение. Линейно-вращательным преобразователем может быть, например, кулачок, треугольный кривошип, коленчатый рычаг или другое механическое устройство для преобразования прямолинейного движения во вращательное движение. Обмотки также могут совершать линейное перемещение в общем направлении относительно узла магнитного статора, чтобы приводить линейно-вращательный преобразователь в прямолинейное движение. Прямолинейное движение может происходить вместе с вращательным движением или без него.
Транспортное средство может содержать шасси, узел магнитного статора, связанный с шасси, кулачок, подвешенный на шасси, и противоположные обмотки, подвешенные на шасси. Обмотки совершают возвратно-поступательное движение в противоположном направлении относительно узла магнитного статора и приводят кулачок во вращательное движение через следящие элементы кулачка. Колесо транспортного средства соединено с кулачком и приводится во вращательное движение за счет кулачка относительно вращательного подшипника.
Узел магнитного статора может содержать единственный магнитный статор, который совместно используется обмотками, или может содержать несколько магнитных статоров, причем каждый магнитный статор соответствует обмотке. Магнитный статор может содержать один магнит или несколько магнитов, а обмотки могут окружать один или несколько магнитов, причем в этом случае несколько магнитов представляют собой внутренние магниты. Статор может дополнительно содержать несколько дополнительных магнитов, расположенных параллельно первым магнитам и находящихся снаружи от обмоток, причем в этом случае несколько дополнительных магнитов представляют собой внешние магниты. В такой конфигурации, следящие элементы могут быть соединены с обмотками в местоположениях, не закрытых внешними магнитами. Например, обмотки могут иметь форму прямоугольника, а четыре узла внешних магнитов могут быть расположены снаружи от обмоток и вдоль четырех сторон обмоток, но не закрывать углы обмоток. Следящие элементы затем могут быть соединены с углами обмоток через промежуточные конструкции, например, такие как кожуха, которые окружают обмотки. Имеющие форму прямоугольника обмотки могут быть изготовлены при помощи штамповки или травления и гибки множества сегментов обмотки, таких как U-образные сегменты, и сборки сегментов для получения обмотки.
В конфигурациях, которые содержат кулачок, кулачок может быть расположен на одной стороне диска, причем узел магнитного статора расположен параллельно плоскости диска. Кроме того, электромагнитные исполнительные механизмы могут быть соединены с кулачком с использованием следящих элементов, а вращательное движение кулачка может вызывать вращательное движение диска, который, в свою очередь, вращает любое колесо, связанное с диском. Противоположные обмотки могут быть расположены так, чтобы совершать возвратно-поступательное движение с фазовым сдвигом 180 градусов друг относительно друга, чтобы подавлять вибрации друг друга. Кулачок устройства может содержать внутреннюю поверхность и внешнюю поверхность, причем каждая из обмоток может быть связана с кулачком с использованием пары следящих элементов, при этом первый элемент из каждой пары следящих элементов сопряжен с внутренней поверхностью, а второй элемент из каждой пары следящих элементов сопряжен с внешней поверхностью. В одной конфигурации, кулачок может содержать выступ с внутренней и внешней поверхностями, причем внутренняя поверхность обращена внутрь, а внешняя поверхность обращена наружу. Альтернативно, кулачок может содержать канавку с внутренней и внешней поверхностями, причем внутренняя поверхность обращена наружу, а внешняя поверхность обращена внутрь. В такой конфигурации, каждая пара кулачковых следящих элементов расположена внутри канавки. Кулачок может иметь различные формы. Например, кулачок может содержать четное число выступов, каждый из которых может иметь форму участка спирали Архимеда.
Устройство также может содержать держатель, связанный с узлом магнитного статора. Держатель может быть использован, например, для соединения устройства с шасси транспортного средства. Устройство может содержать опорную конструкцию, связанную с держателем, и узел магнитного статора, через множество валов связанный с опорной конструкцией и расположенный параллельно длинной оси узла магнитного статора, причем обмотки совершают возвратно-поступательное движение вдоль узла магнитного статора за счет скольжения вдоль валов с использованием линейных подшипников или других аналогичных компонентов. Опорная конструкция также может быть связана с кулачком и диском с использованием вращательного подшипника. В применениях, относящихся к транспортному средству, опорная конструкция может быть связана с шасси транспортного средства, а диск может быть расположен внутри колеса транспортного средства, причем вращательное движение диска вызывает вращательное движение колеса.
В дополнение к приведению линейно-вращательного преобразователя во вращательное или прямолинейное движение, электромагнитные исполнительные механизмы могут действовать как генераторы за счет отбора тока из обмоток, когда линейно-вращательный преобразователь вращается или поступательно перемещается. Когда механизмы действуют как генераторы, они поглощают энергию вращательного или прямолинейного движения линейно-вращательного преобразователя, чтобы уменьшить вращательное или прямолинейное движение линейно-вращательного преобразователя, например, при рекуперативном торможении или в активной регенеративной подвеске.
Устройство также может содержать первый и второй кулачки, причем первый кулачок расположен на одной стороне диска, а второй кулачок расположен на противоположной стороне диска. Такие конфигурации также могут содержать второй узел магнитного статора, расположенный параллельно первому узлу магнитного статора на противоположной стороне диска. Эти конфигурации также могут содержать дополнительные электромагнитные исполнительные механизмы, которые содержат соответствующие дополнительные обмотки, причем указанные дополнительные обмотки связаны со вторым кулачком с использованием дополнительных следящих элементов и совершают возвратно-поступательное движение в противоположных направлениях вдоль длинной оси второго узла магнитного статора. Возвратно-поступательное движение дополнительных обмоток способствует вращательному движению диска. В устройствах, которые содержат два кулачка, первый и второй кулачки могут быть вращательно смещены друг от друга, например, на 45 градусов.
Устройство также может содержать жидкостные форсунки, которые предназначены для распыления жидкости на обмотки, которые проходят мимо форсунок, чтобы охлаждать обмотки. Форсунки могут быть прикреплены к узлу магнитного статора и могут распылять жидкость на обмотки через отверстия в магнитах узла магнитного статора. Кроме того, распыленная жидкость может быть преобразована в газ и удалена за счет вентиляции из устройства.
В применениях, связанных с транспортным средством, например, имеющим одно или несколько колес, узел магнитного статора, кулачок, вращательный подшипник, опорная конструкция, валы и обмотки все могут быть расположены внутри окружностей колеса. В таких применениях, узел магнитного статора может быть ориентирован в вертикальном направлении относительно шасси транспортного средства, причем поступательное движение колеса в вертикальном направлении действует как подвеска для транспортного средства. За счет такой подвески колесо, кулачок и обмотки образуют неподрессоренную массу, а шасси, узел магнитного статора, опорная конструкция и валы образуют подрессоренную массу.
Устройство также может содержать электрический блок, который подвешен на шасси и который используют для подачи электрического тока на обмотки. Эта конфигурация также может содержать волоконно-оптический кабель, который проложен между электрическим блоком и транспортным средством и используется для управления электрическим блоком. В некоторых конфигурациях, электрический блок может содержать двунаправленный источник питания, соединяющий обмотки и батарею, причем батарея может быть установлена внутри колеса транспортного средства или на шасси транспортного средства. Кроме того, электрический блок может быть сконфигурирован так, чтобы подавать электрический компонент на обмотки, чтобы перемещать обмотки в одном и том же направлении, за счет чего создается вертикальное поступательное движение колеса. Дополнительно, любое поступательное движение колеса, вызванное за счет устройство или нет, измеряется электрическим блоком. В некоторых конфигурациях, электрический блок может быть сконфигурирован так, чтобы поглощать энергию от поступательного движения колеса за счет работы обмоток как электрические генераторы и амортизаторы (демпферы).
Устройство может содержать опорную конструкцию для колеса и флюидный амортизатор, соединяющий опорную конструкцию с шасси транспортного средства. В этом случае опорная конструкция может служить как первичная подвеска, возможно скользящая вдоль валов, соединяющих опорную конструкцию и держатель, причем скольжение демпфируется при помощи флюидного амортизатора. Флюидным амортизатором может быть пневматическая подвеска между опорной конструкцией и шасси, которая может содержать поршень с противоположными пневматическими давлениями, приложенными к противоположным сторонам поршня. Давление можно регулировать за счет изменения жесткости подвески. Пневматическая подвеска может обеспечивать низкочастотное демпфирование, в то время как обмотки обеспечивают более высокочастотное демпфирование. Дополнительные конфигурации могут содержать множество флексур, которые используют для подачи тока в обмотки, причем первый набор флексур присоединен между шасси и опорной конструкцией, а второй набор флексур присоединен между опорной конструкцией и обмотками.
В применениях, связанных с транспортным средством, могут быть использованы два вращательных устройства, причем каждое устройство содержит узел магнитного статора, противоположные обмотки, кулачок, вращательный подшипник и колесо. В этих конфигурациях, вращательные устройства оба могут вращаться в одном и том же направлении, за счет чего создается тяговое усилие для транспортного средства. Колеса вращательных устройств также могут вращаться с различной скоростью или в разных направлениях, что побуждает вращательные устройства и колеса вращаться относительно транспортного средства. Таким транспортным средством можно управлять при его движении за счет изменения скоростей вращения колес. Транспортное средство также может двигаться в вертикальном направлении за счет движения колес в одном и том же вертикальном направлении, возможно, с достаточной силой, чтобы транспортное средство могло совершить прыжок. Два устройства могут также наклонять колеса за счет перемещения двух колес в противоположных вертикальных направлениях. Кроме того, устройства могут быстро поднимать и встряхивать одно колесо в вертикальном направлении, чтобы удалять жидкость с поверхности встряхиваемого колеса. Некоторые конфигурации для транспортных средств могут содержать четыре угла с двумя вращательными устройствами в каждом углу. В этих конфигурациях, каждая пара вращательных устройств может вращаться относительно соответствующей вертикальной оси. Четыре пары вращательных устройств могут вращать соответствующие колеса для вращения транспортного средства или даже вращать транспортное средство вокруг его центра. Четыре пары вращательных устройств также могут поворачивать соответствующие колеса внутрь для парковки транспортного средства.
Электрический генератор содержит вращательно-линейный преобразователь, узел магнитного статора и противоположны обмотки. Каждая обмотка выполнена так, чтобы совершать возвратно-поступательное движение относительно узла магнитного статора, и соединена с вращательно-линейным преобразователем, которым может быть, например, кулачок, треугольный кривошип, коленчатый рычаг или другое механическое устройство для преобразования вращательного движения в прямолинейное движение. За счет вращения вращательно-линейный преобразователь приводит обмотки в противоположное возвратно-поступательное движение, за счет чего через обмотки начинает протекать электрический ток, который может быть отобран из обмоток. Обмотки могут линейно перемещаться в общем направлении, вместе с преобразователем, относительно узла магнитного статора, за счет чего через обмотки также начинает протекать электрический ток. Прямолинейное движение может происходить вместе с вращательным движением или без него.
Вместо того, чтобы быть изготовленным из одного куска материала, электрическая обмотка может содержать несколько плоских сегментов обмотки, уложенных в пакет и электрически соединенных последовательно, причем каждый сегмент обмотки повернут относительно соседнего сегмента обмотки в пакете сегментов обмотки. Например, каждый сегмент обмотки может иметь U-образную форму и может иметь поворот на 270 градусов относительно соседнего сегмента обмотки в пакете сегментов обмотки. Способ изготовления такой электрической обмотки предусматривает изготовление нескольких плоских сегментов обмотки, укладку их в пакет и электрическое соединение нескольких сегментов обмотки последовательно, причем каждый сегмент обмотки повернут относительно следующего сегмента обмотки в пакете, и закрепление сегментов обмотки вместе для образования электрической обмотки.
Сегменты обмотки могут быть изготовлены с небольшими расходами, например, за счет штамповки или травления и гибки сегментов обмотки из плоского листа металла. Все стороны сегмента обмотки могут иметь одинаковую длину или, альтернативно, смежные стороны сегмента обмотки могут иметь разную длину, в то время как противоположные стороны сегмента обмотки могут иметь одинаковую длину. Обмотка дополнительно может иметь электроизоляционный материал на участках сегментов обмотки. В пакете сегментов обмотки, например, все поверхности сегментов обмотки могут быть покрыты слоем электроизоляционного материала, за исключением верхней поверхности завершающего конца нижнего сегмента обмотки в пакете и нижней поверхности начального конца непосредственно более верхнего сегмента обмотки в пакете. Сегменты могут быть скреплены вместе с использованием болтов, например, которые могут быть пропущены через углы сегментов обмотки. Слой электроизоляционного материала также может покрывать болты. При сборке электроизоляционные прокладки могут быть введены в зазоры между сегментами обмотки.
Перестраиваемая пневматическая подвеска может содержать поршень и противоположные камеры, позволяющие прикладывать соответствующие противоположные пневматические давления к противоположным сторонам поршня. Подвеска также может содержать пневматический контроллер, который независимо регулирует пневматические давления в камерах. Давления в камерах можно регулировать путем изменения относительных положений поршня и камер за счет изменения давлений. Кроме того, давления в камерах можно регулировать путем изменения жесткости подвески, добавляя равные давления в камеры или удаляя равные давления из них. Добавление равных давлений в обе камеры повышает жесткость подвески, а удаление равных давлений из обеих камер понижает жесткость подвески. Если подвеска является частью транспортного средства, изменение относительных положений поршня и камер может изменять высоту движения транспортного средства, а изменение жесткости подвески может изменять жесткость при движении транспортного средства.
Указанные ранее и другие характеристики изобретения будут более ясны из последующего детального описания, приведенного со ссылкой на сопроводительные чертежи, на которых аналогичные детали имеют одинаковые позиционные обозначения. Чертежи не обязательно приведены в истинном масштабе, а вместо этого масштаб намеренно изменен, чтобы лучше выделить характеристики вариантов осуществления настоящего изобретения.
Краткое описание чертежей
На фиг. 1А и 1В показаны примерные вращательные устройства.
На фиг. 1С показан примерный узел магнитного статора.
На фиг. 1D-1F показаны поперечные сечения примерных вращательных устройств.
На фиг. 2А-2С показаны компоненты примерного вращательного устройства при его работе.
На фиг. 2D показана примерная форма кулачка.
На фиг. 2Е-2Н показано примерное вращательное устройство при его работе, когда оно соединено с колесом.
На фиг. 3А и 3В показано примерное вращательное устройство с дополнительным кулачком и компонентами магнитного статора.
На фиг. 4А показан держатель, прикрепленный к узлу магнитного статора примерного вращательного устройства.
На фиг. 4В показано упрощенное поперечное сечение примерного вращательного устройства, прикрепленного к шасси транспортного средства.
На фиг. 5A-5D показана опорная конструкция, соединяющая узел магнитного статора и держатель примерного вращательного устройства с электромагнитными исполнительными механизмами и обмотками устройства через множество валов.
На фиг. 6А показан вращательный подшипник, соединяющий опорную конструкцию примерного вращательного устройства с кулачком устройства.
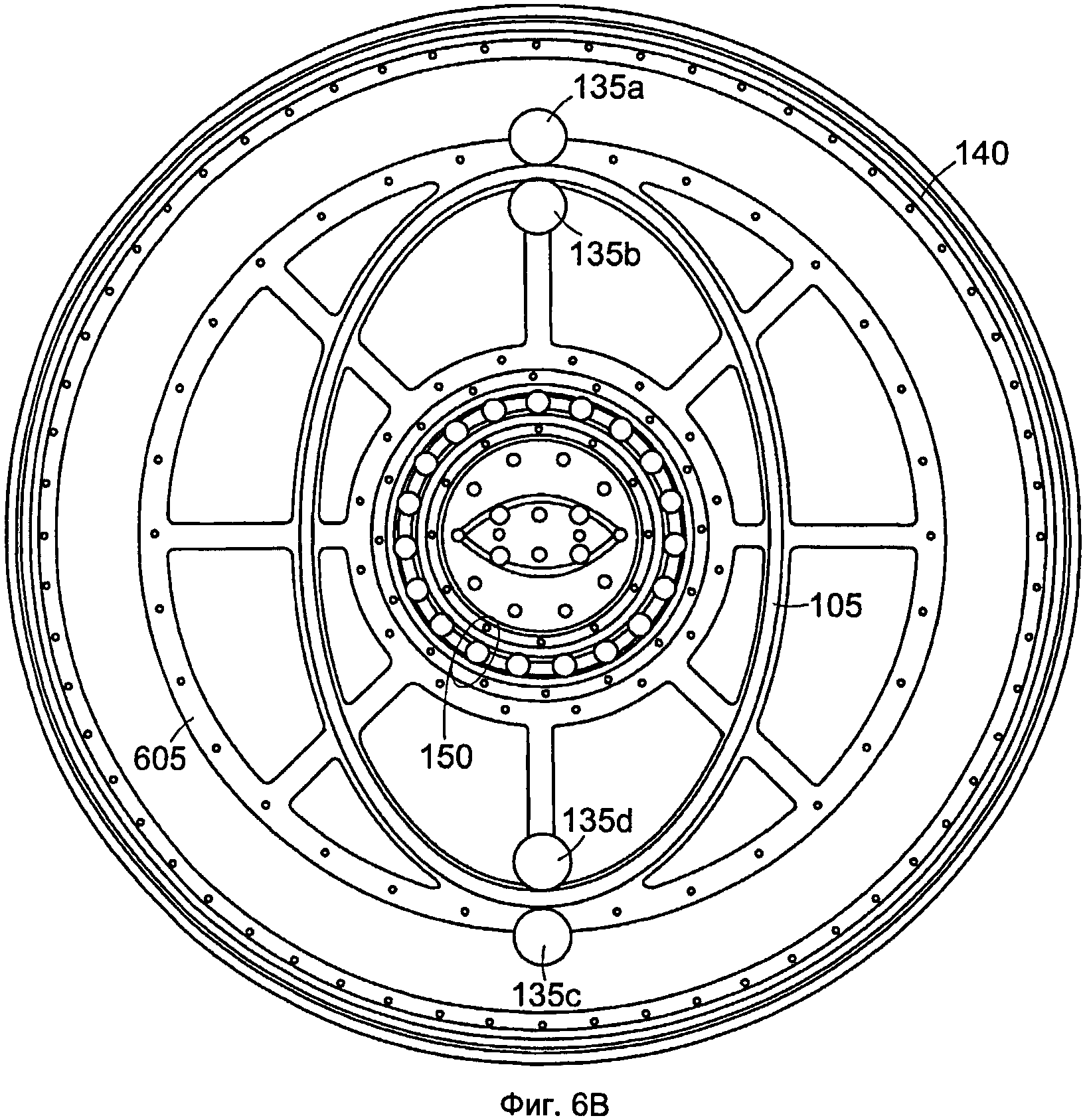
На фиг. 6В показана конструкция для колеса, соединяющего кулачок примерного вращательного устройства с колесом транспортного средства.
На фиг. 7 показан горизонтальный разрез примерного вращательного устройства.
На фиг. 8 показан горизонтальный разрез примерного вращательного устройства в виде сверху вниз.
На фиг. 9 показана внутренняя конструкция узла магнитного статора примерного вращательного устройства.
На фиг. 10 показан горизонтальный разрез примерного вращательного устройства.
На фиг. 11 показан горизонтальный разрез примерного вращательного устройства.
На фиг. 12А показан вертикальный разрез примерного вращательного устройства, где можно видеть, как может быть расположена опорная конструкция примерного вращательного устройства.
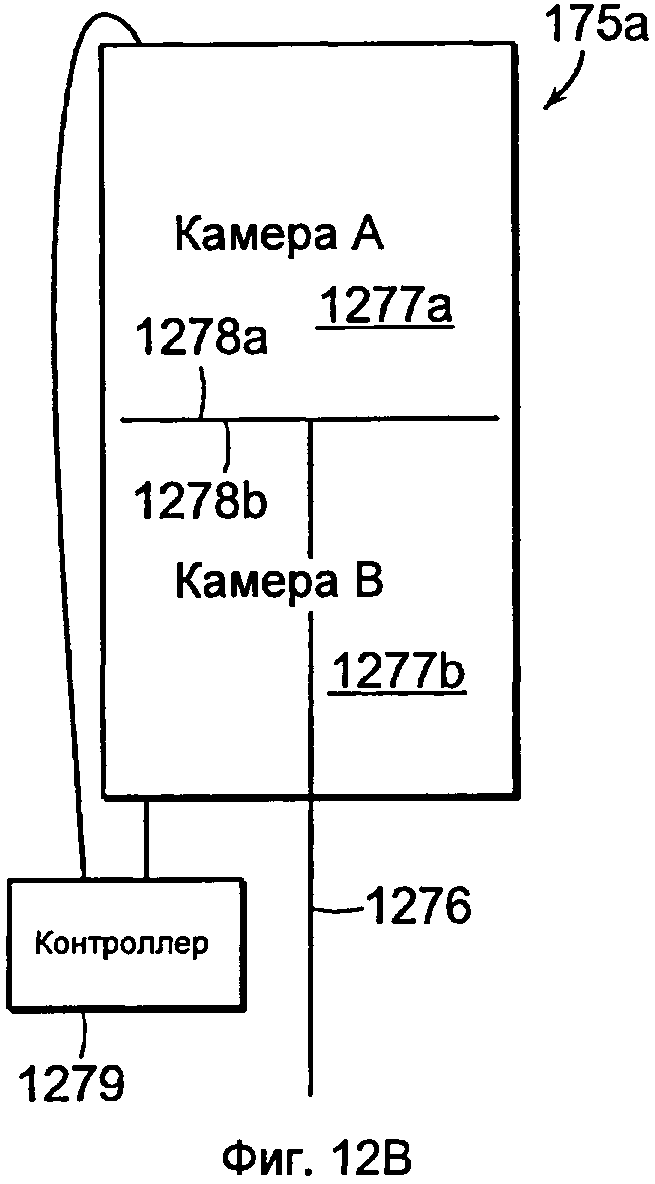
На фиг. 12B-12D показана примерная перестраиваемая пневматическая подвеска.
На фиг. 13А и 13В показано примерное вращательное устройство в других вертикальных положениях.
На фиг. 14А-14С показана конструкция примерной обмотки электромагнитного исполнительного механизма.
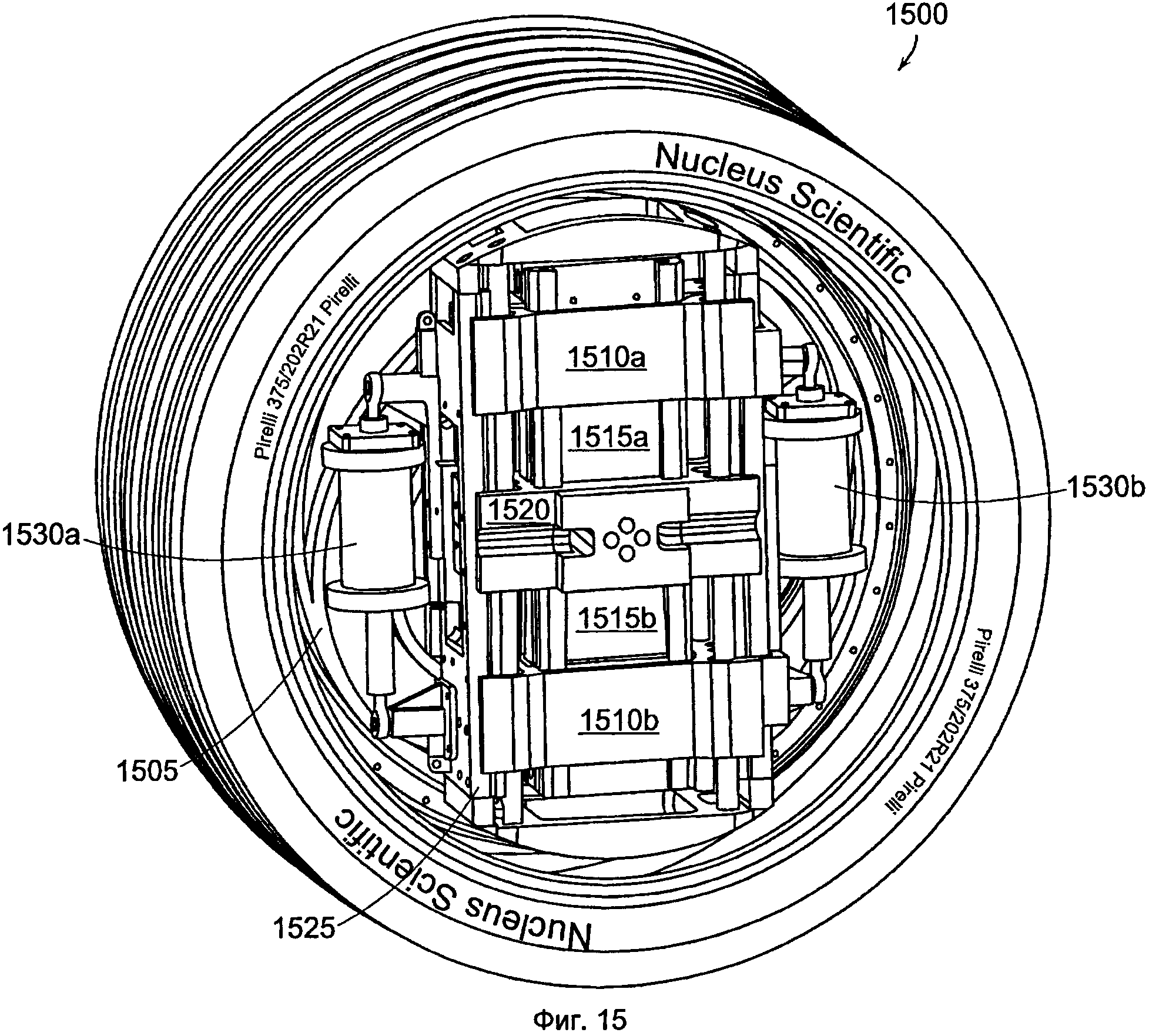
На фиг. 15 показан колесо, которое содержит примерное вращательное устройство.
На фиг. 16А и 16В показаны другие виды примерного вращательного устройства.
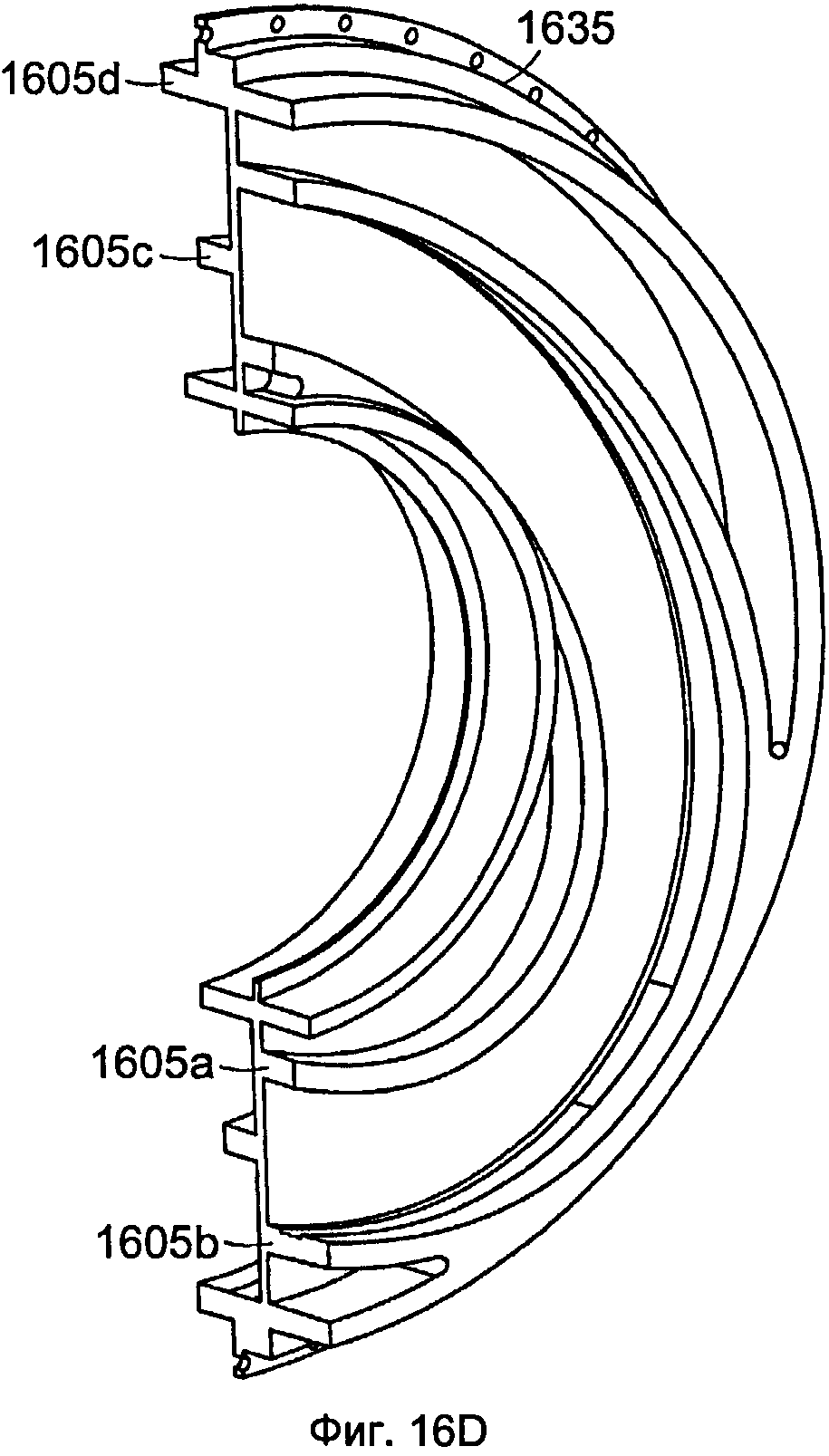
На фиг. 16С и 16D показаны два вращательно смещенных кулачка.
На фиг. 16Е показана примерная форма кулачка.
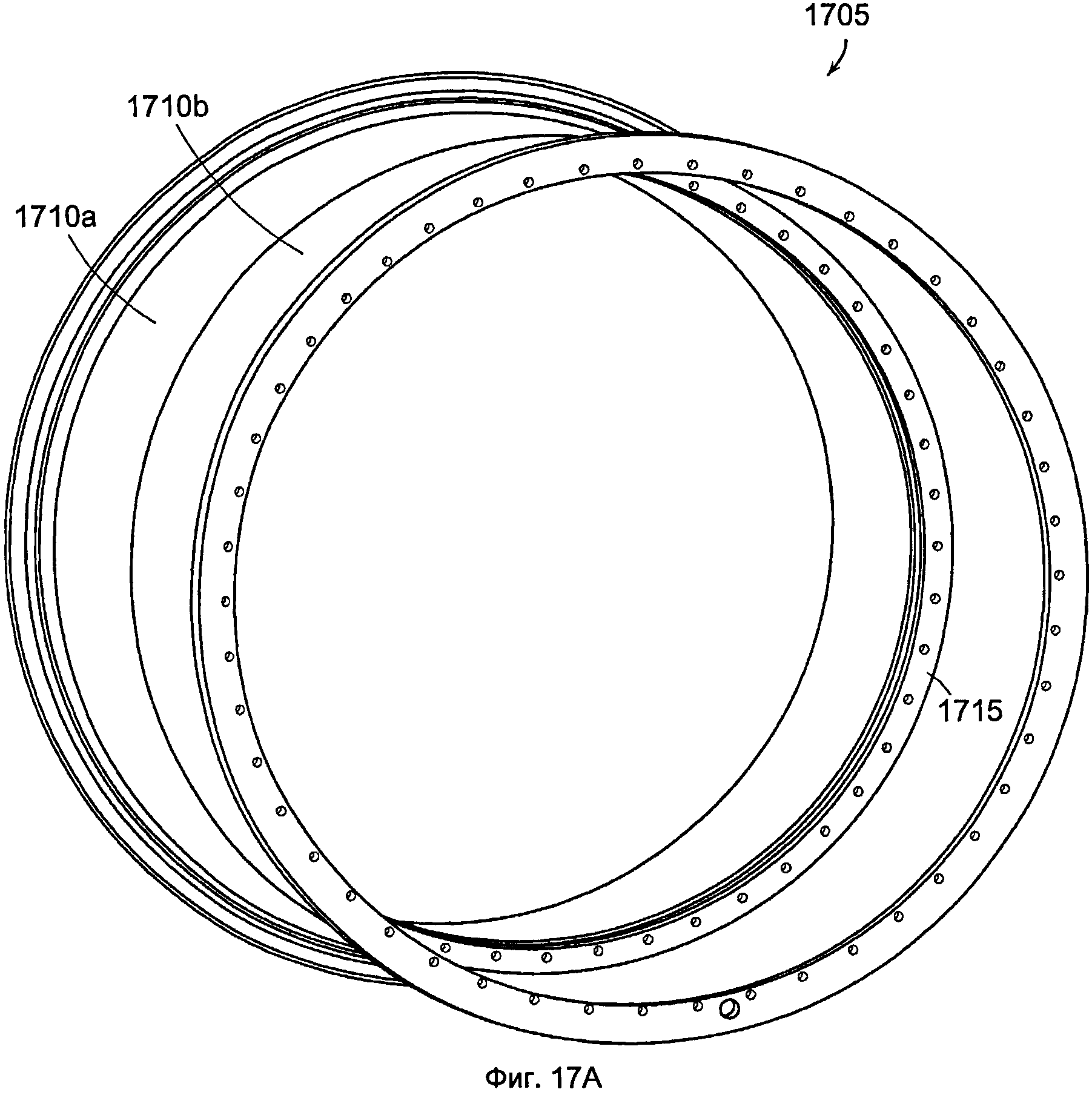
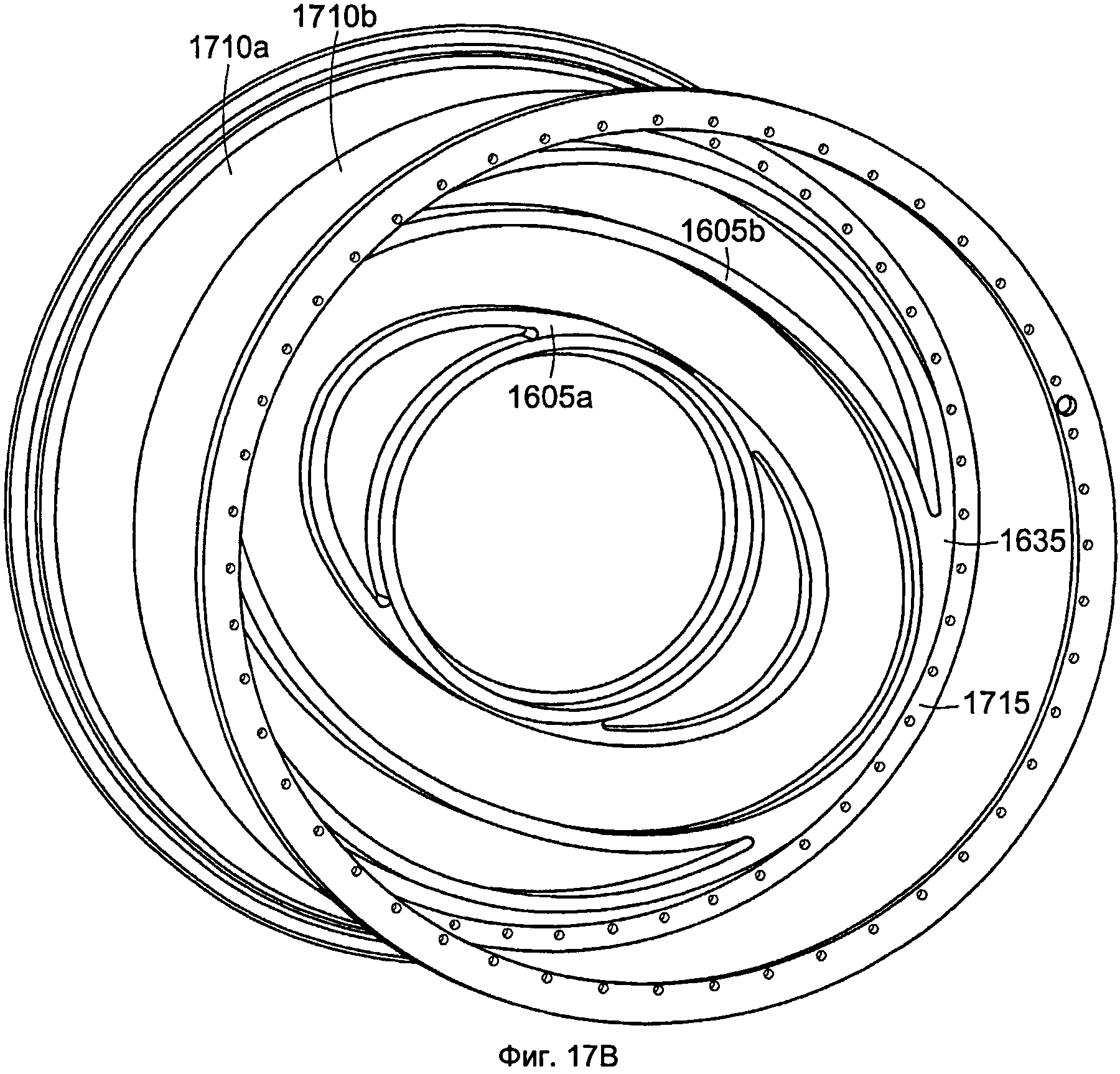
На фиг. 17А и 17В показан диск примерного вращательного устройства, соединенный с ободом колеса.
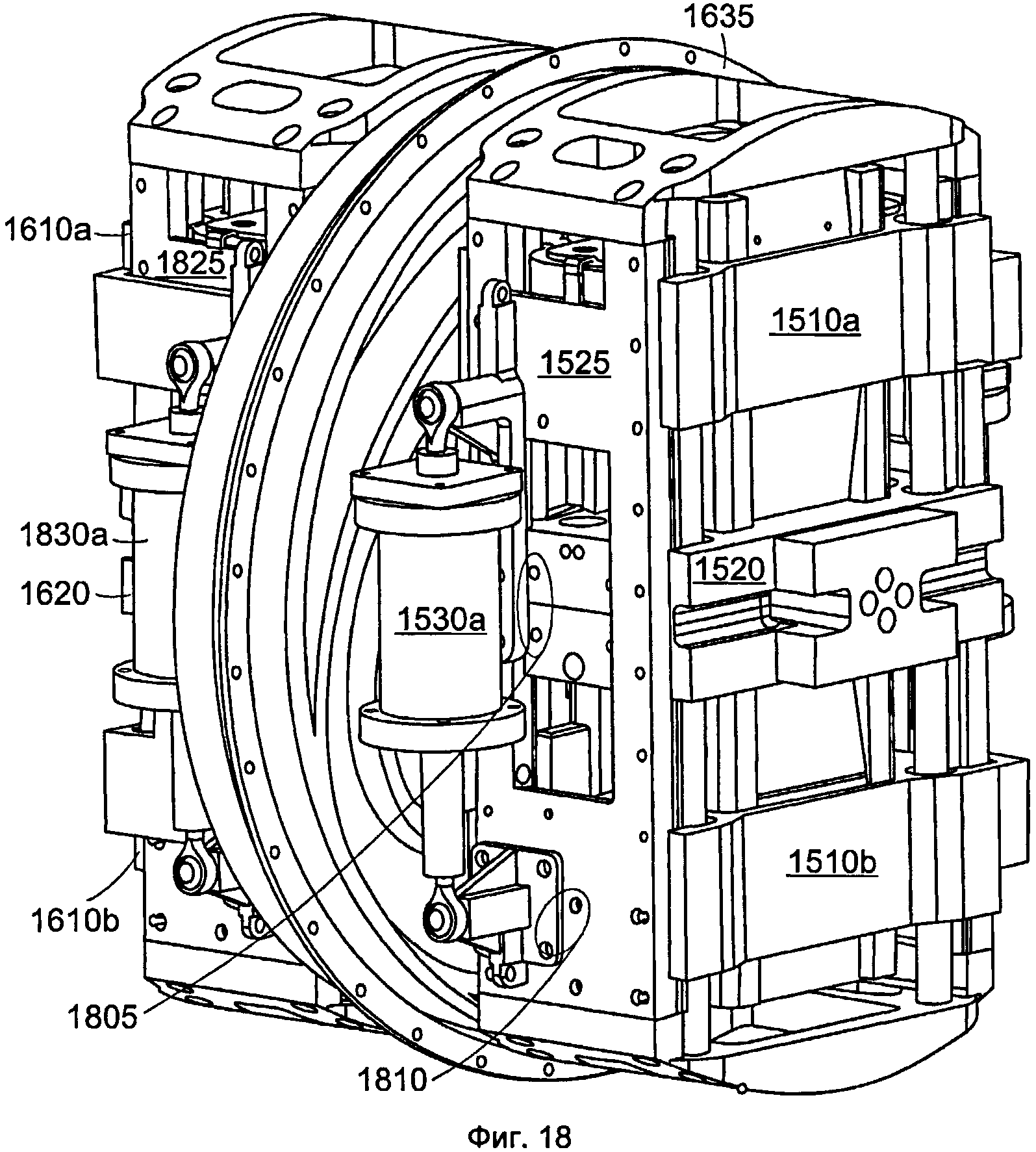
На фиг. 18 показаны две опорные конструкции, соединяющие соответствующие узлы магнитного статора с электромагнитными исполнительными механизмами через множество валов и флюидных амортизаторов.
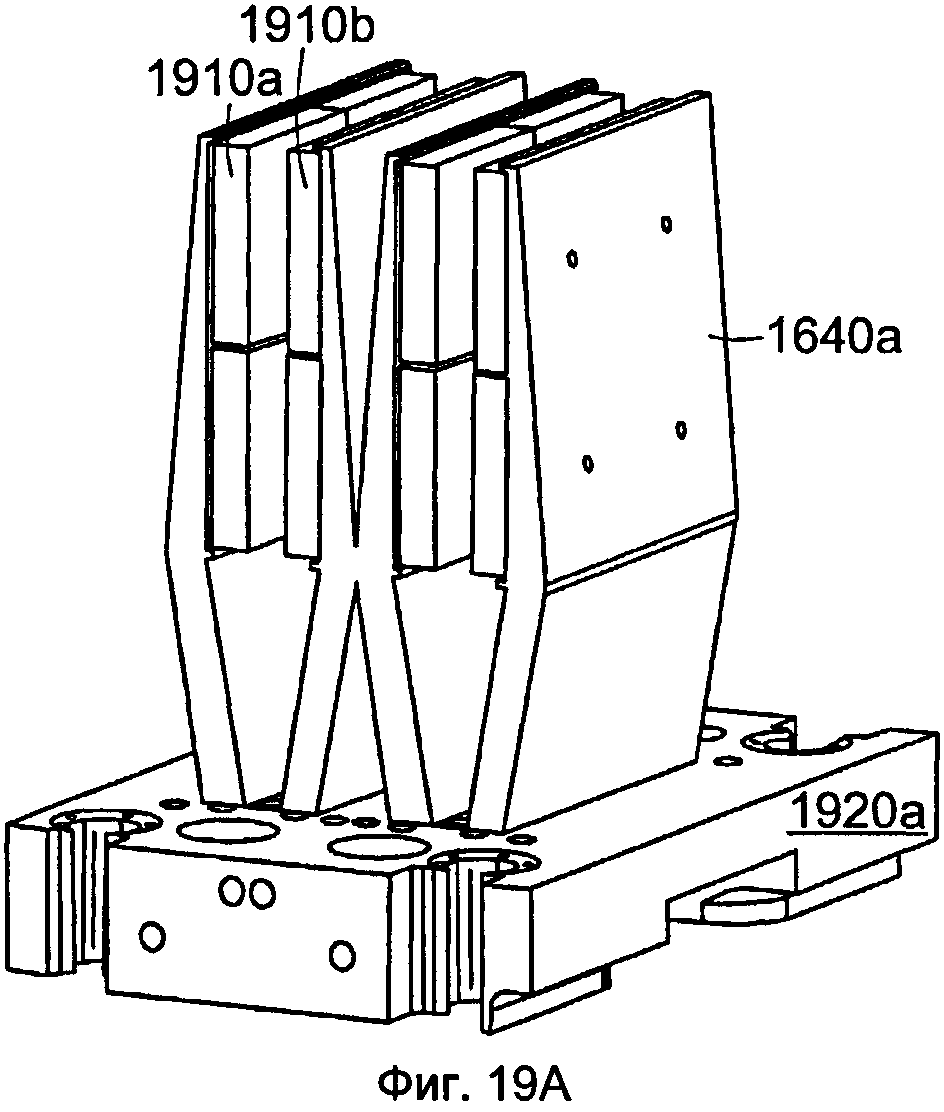
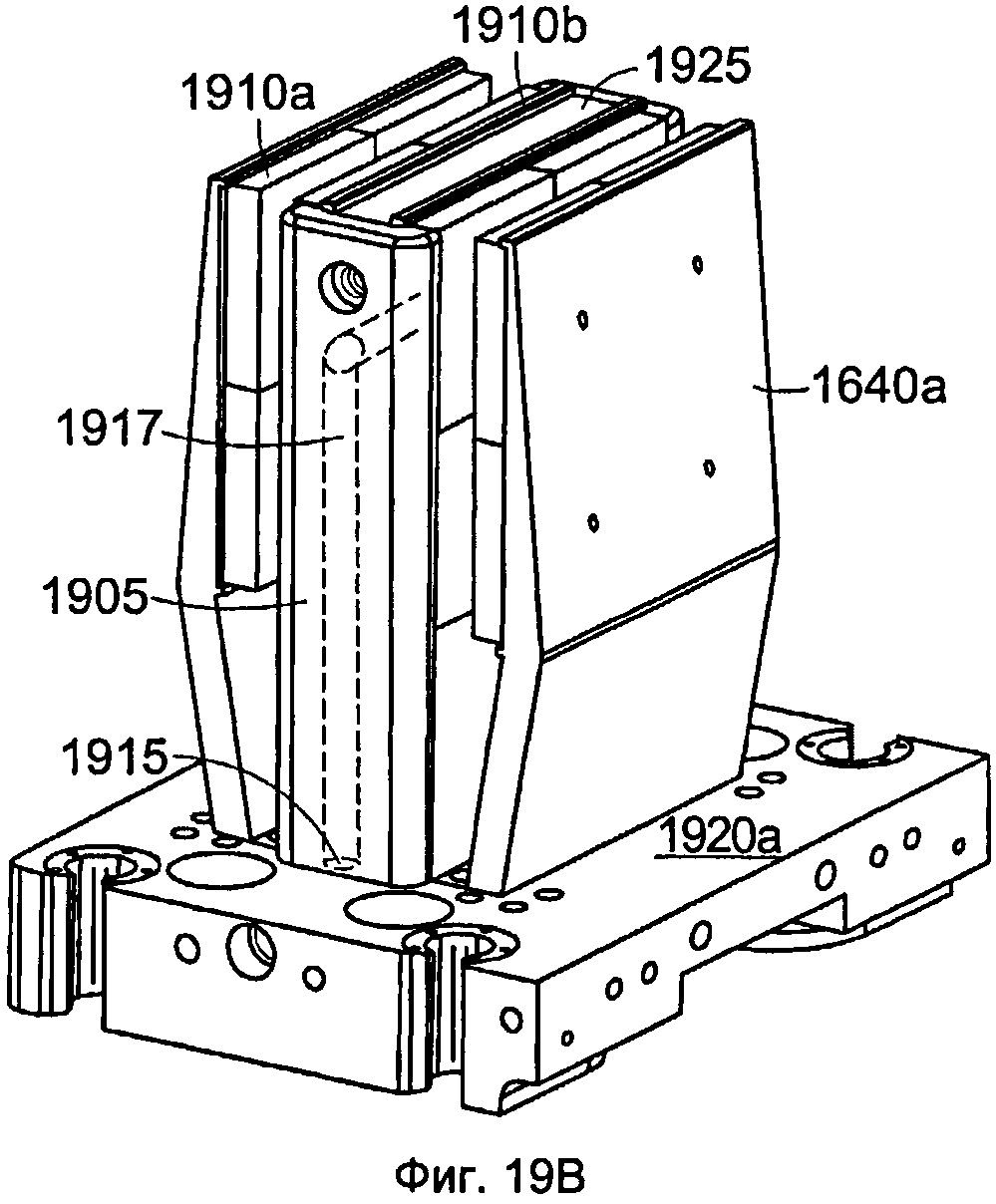
На фиг. 19А-19С показана примерная компоновка магнитных статоров.
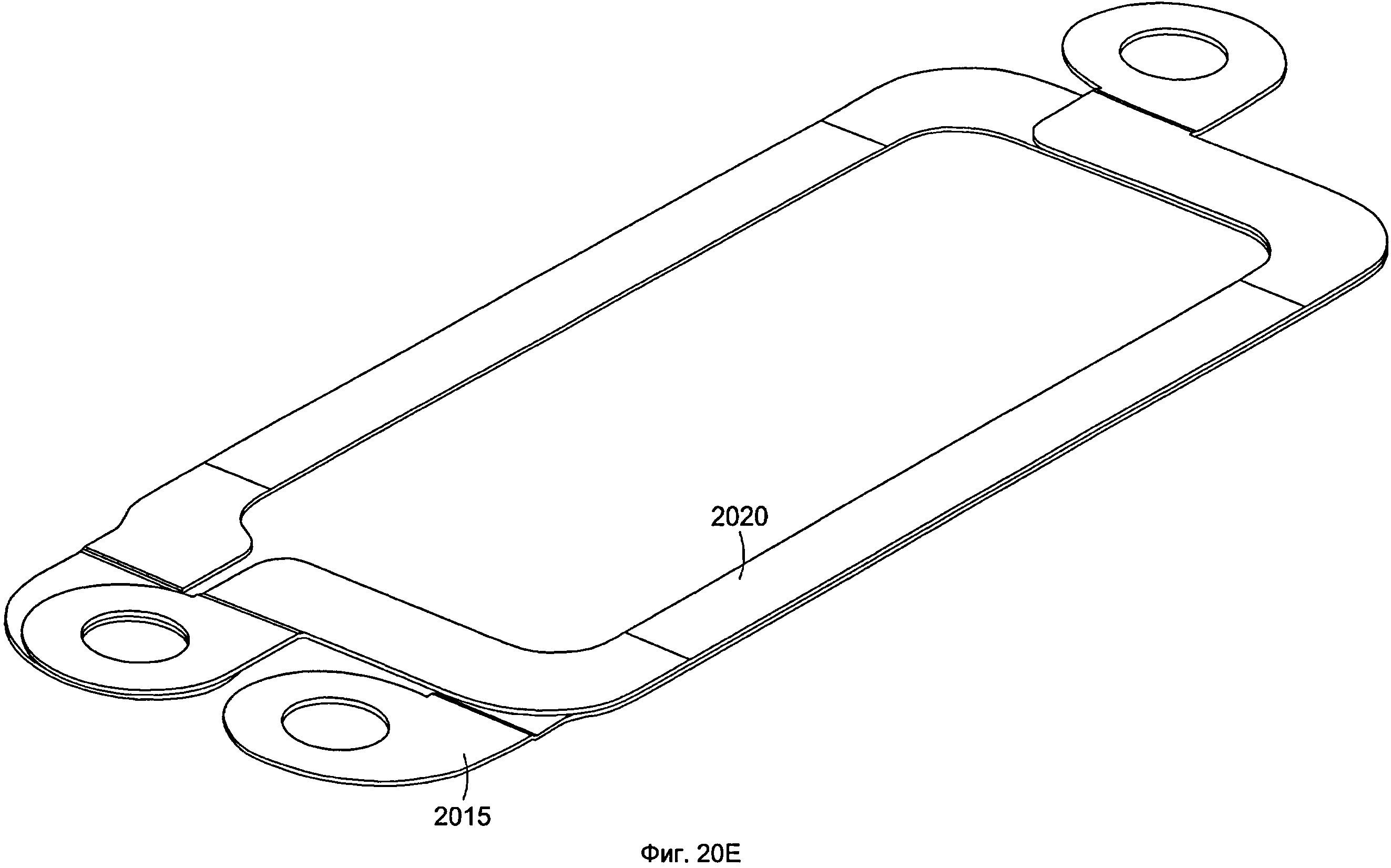
На фиг. 20A-20G показана конструкция примерной обмотки электромагнитного исполнительного механизма.
На фиг. 21А и 21В показаны соответственно вид сбоку и вид сверху двух вращательных устройств с соответствующими колесами.
На фиг. 22А-22С показаны различные другие устройства для вращения колес.
На фиг. 23А и 23В показано вертикальное перемещение колес.
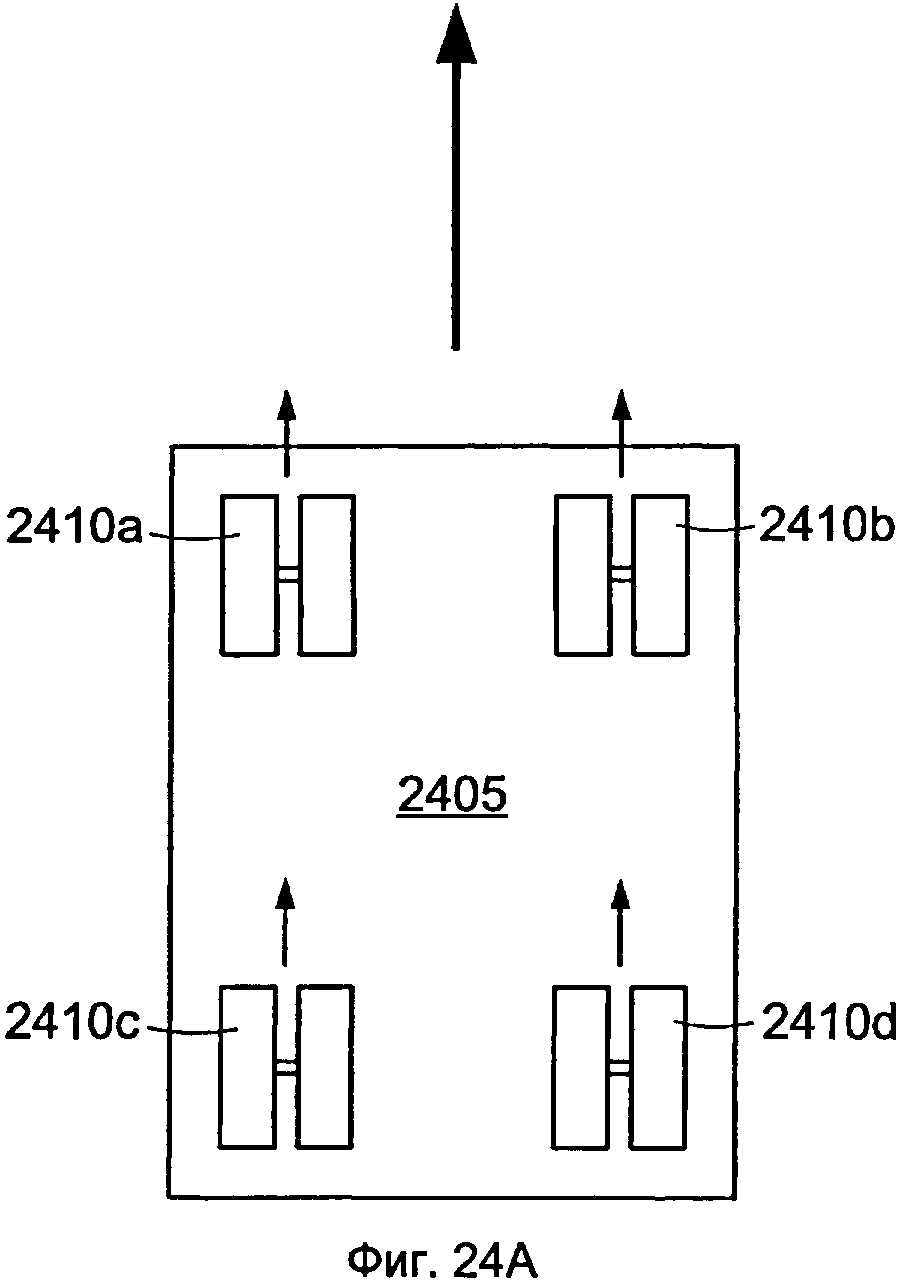
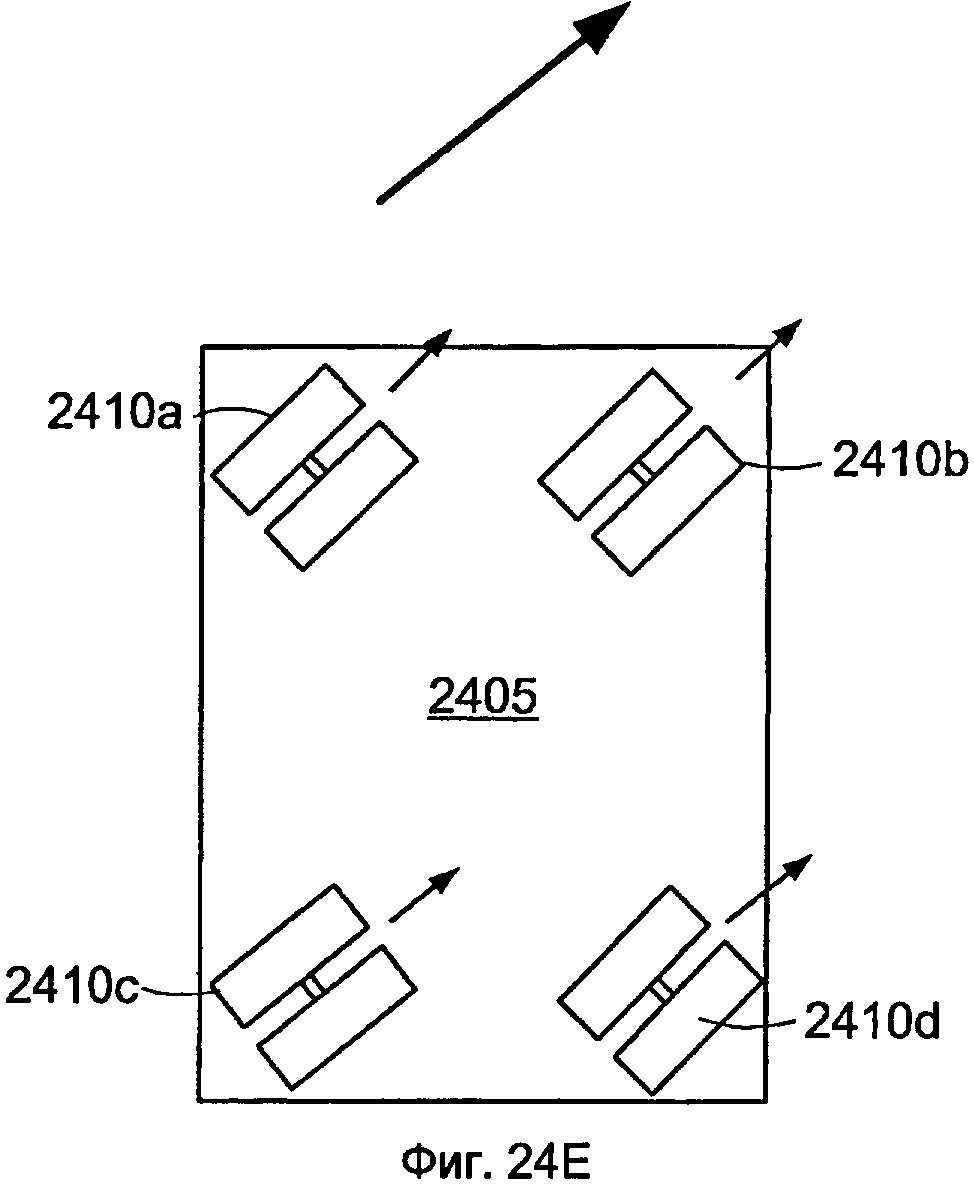
На фиг. 24A-24F показан вид сверху транспортного средства, имеющего четыре пары вращательных устройств с соответствующими колесами.
Подробное описание изобретения
Далее приведено описание примерных вариантов осуществления настоящего изобретения.
На фиг. 1А показано примерное вращательное устройство 100, расположенное внутри колеса. Устройство содержит узел 120 магнитного статора, противоположные электромагнитные исполнительные механизмы 110а, 100b и линейно-вращательный преобразователь (например, кулачок) 105. Устройство может быть прикреплено к шасси транспортного средства, например, в точке на дальней стороне колеса (не показано). Вращательное устройство, расположенное внутри колеса, может быть прикреплено к колесу через кулачок 105, например, с использованием кольцевой пластины, которая была условно удалена, чтобы показать внутреннюю область колеса. Такая пластина может быть прикреплена как к ободу колеса, так и к кулачку 105 с использованием крепежных деталей, таких как болты. Колесо и кулачок поддерживают пластину с возможностью вращения относительно ступицы 145 вокруг подшипника 150. Важно отметить, что несмотря на то, что показан кулачок 105 овальной формы, он может иметь и другую форму, например, может иметь несколько выступов.
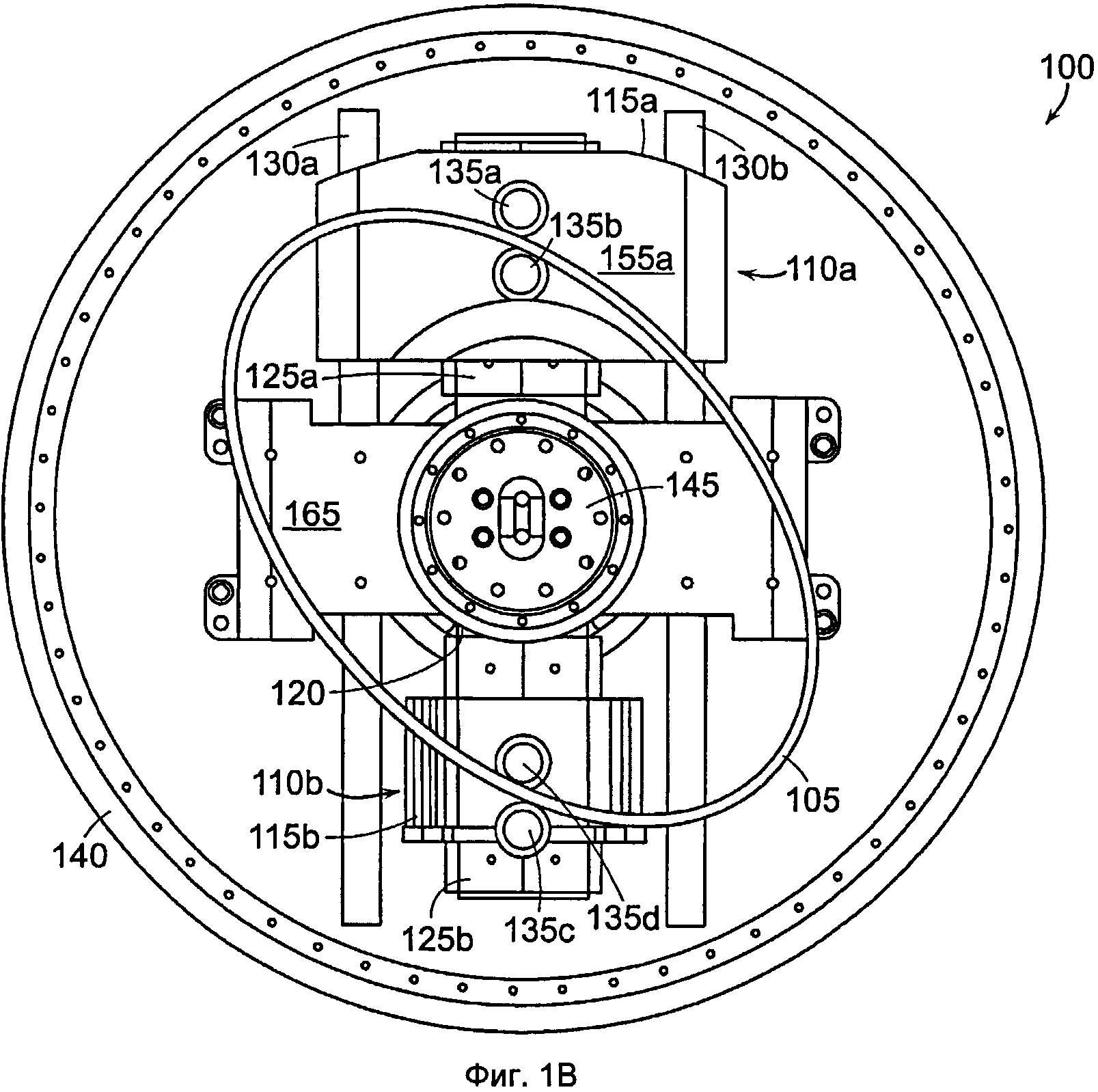
На фиг. 1В показано примерное вращательное устройство 100 в виде сбоку от колеса 140, причем шина колеса 140 и некоторые другие компоненты условно удалены. Сердечник вращательного устройства содержит кулачок 105, два противоположных электромагнитных исполнительных механизма 110а, 110b и узел 120 магнитного статора. Каждый из электромагнитных исполнительных механизмов 110а, 110b содержит соответствующую обмотку 115а, 115b, которая может совершать возвратно-поступательное движение относительно узла 120 магнитного статора. Электромагнитный исполнительный механизм 110а имеет кожух 155а, окружающий его обмотку 115а, а другой электромагнитный исполнительный механизм 110b показан без кожуха, который условно удален, чтобы показать его обмотку 115b.
Узел 120 магнитного статора, показанный на фиг. 1В, ориентирован вертикально и может содержать множество магнитных статоров 125а, 125b. Каждый из магнитных статоров 125а, 125b может содержать один магнит или несколько магнитов. Когда ток протекает через обмотки 115а, 115b электромагнитных исполнительных механизмов 110а, 110b (например, переменный ток), тогда исполнительные механизмы 110а, 110b побуждаются совершать возвратно-поступательное движение вертикально вдоль узла 120 магнитного статора за счет результирующих сил. Специалистам в данной области хорошо известно, что когда обмотку, по которой протекает электрический ток, вводят в магнитное поле, тогда каждый из движущихся зарядов тока испытывает силу Лоренца, которые совместно прикладывают усилие к обмотке. На чертежах показано, что вращательное устройство 100 может содержать множество валов 130а, 130b, соединенных с опорной конструкцией 165 для подшипника. Электромагнитные исполнительные механизмы 110а, 110b могут скользить вдоль валов с использованием, например, линейных подшипников. Могут быть использованы и другие подшипники, в том числе воздушные подшипники, подшипники на базе нитрида кремния, графитовые подшипники и линейные роликовые подшипники. К каждому электромагнитному исполнительному механизму 110а, 110b может быть прикреплена пара следящих элементов 135a-d, которые взаимодействуют с кулачком 105. Для снижения трения следящие элементы 135a-d могут катиться по поверхностям кулачка 105. Следящие элементы 135a-d могут быть прикреплены к электромагнитным исполнительным механизмам 110а, 110b, например, с использованием кожухов исполнительных механизмов. Когда электромагнитные исполнительные механизмы 110а, 110b совершают возвратно-поступательное движение, усилие, оказываемое следящими элементами 135a-d на кулачок 105, побуждает кулачок 105 совершать вращательное движение.
На фиг. 1С показан примерный узел 120 магнитного статора с двумя магнитными статорами 125а, 125b. Каждый из магнитных статоров 125а, 125b содержит несколько магнитов. Например, магнитный статор 125а содержит, на одной поверхности статора 125а, восемь магнитов 160a-h.
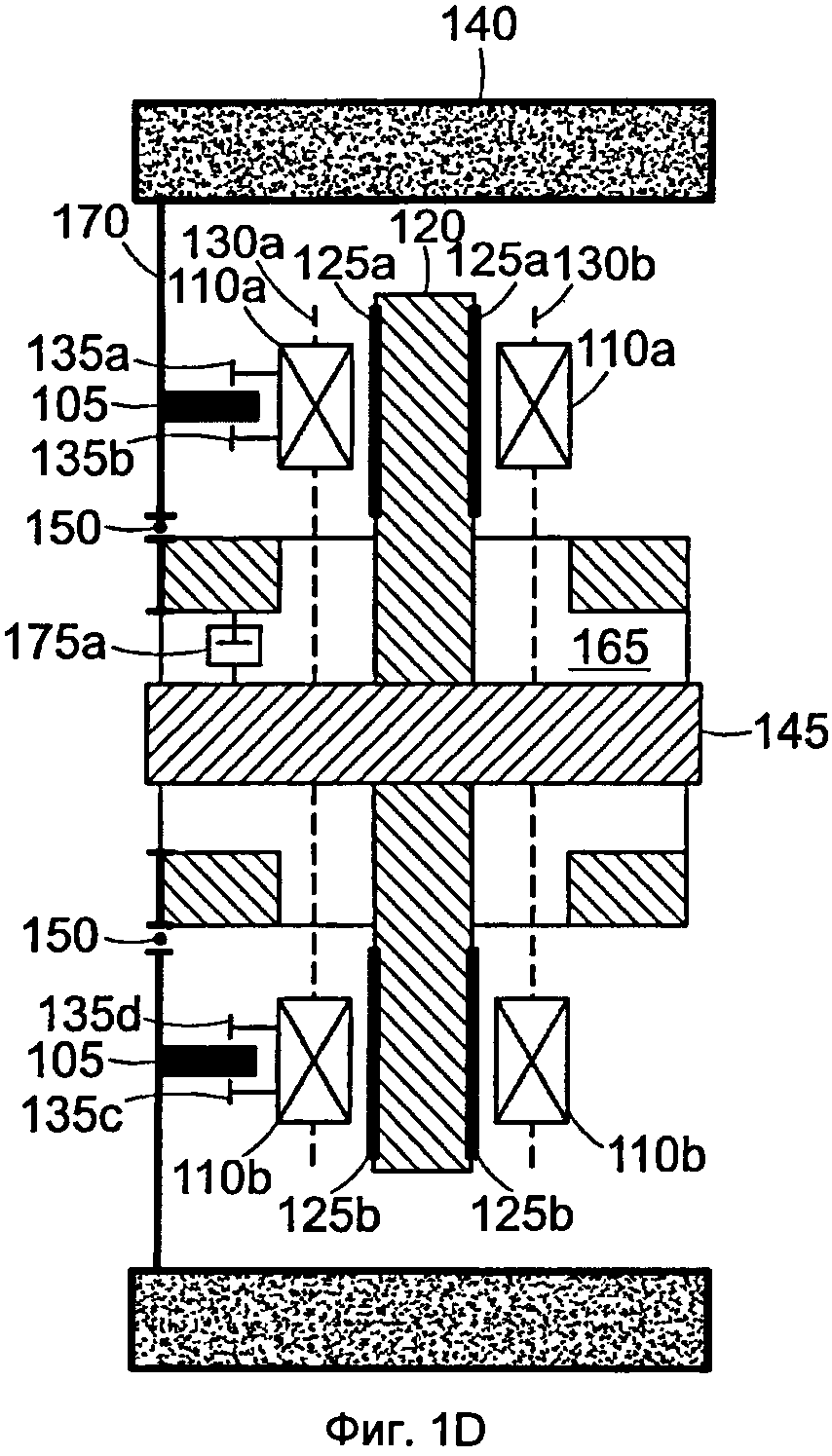
На фиг. 1D-1F показаны упрощенные поперечные сечения примерного вращательные устройства. Устройство на фиг. 1D находится внутри колеса 140 транспортного средства и содержит ступицу (или держатель) 145, присоединенную к узлу 120 магнитного статора, имеющему два магнитных статора 125а, 125b. Также показаны два электромагнитных исполнительных механизма (которые содержат обмотки) 110а, 110b, совершающие возвратно-поступательное движение относительно узла 120 магнитного статора вдоль валов 130а, 130b (показанных пунктиром). Валы 130а, 130b, которые связаны с опорной конструкцией 165 подшипника, удерживают компоненты устройства при вертикальном совмещении и не позволяют устройству выпадать из колеса 140. Кулачковая пластина (диск) 170, связанная с колесом 140, вращательно связана с опорой 165 подшипника через подшипник 150. Прикрепленный к кулачковой пластине 170 кулачок 105 используют для привода во вращательное движение пластины 170 и, таким образом, колеса 140. Кулачок 105 приводится в движение за счет возвратно-поступательного движения электромагнитных исполнительных механизмов 110а, 110b с использованием следящих элементов 135a-d, которые связаны с электромагнитными исполнительными механизмами 110а, 110b и которые сопряжены с кулачком 105. Примерное устройство также содержит флюидный амортизатор 175а, соединяющий опору 165 подшипника и держатель 145. Флюидный амортизатор 175а подвешивает держатель 145 над землей и позволяет некоторое перемещение между опорой 165 подшипника и держателем 145, в зависимости от величины сопротивления амортизатора. Например, если амортизатор представляет собой пневматический амортизатор (демпфер), то более высокие давления газа внутри камер амортизатора позволяют меньшее движение, чем более низкие давления воздуха.
На фиг. 1E показано, что, в отсутствие флюидного амортизатора 175а, электромагнитные силы, созданные за счет электромагнитных исполнительных механизмов 110а, 110b и магнитных статоров 125а, 125b, могут подвешивать держатель 145 над землей. Однако, если снять электрический ток с электромагнитных исполнительных механизмов 110а, 110b, то также пропадут соответствующие электромагнитные силы и держатель 145 может упасть на землю вместе с узлом 120 магнитного статора и шасси транспортного средства, как это показано на фиг. 1F.
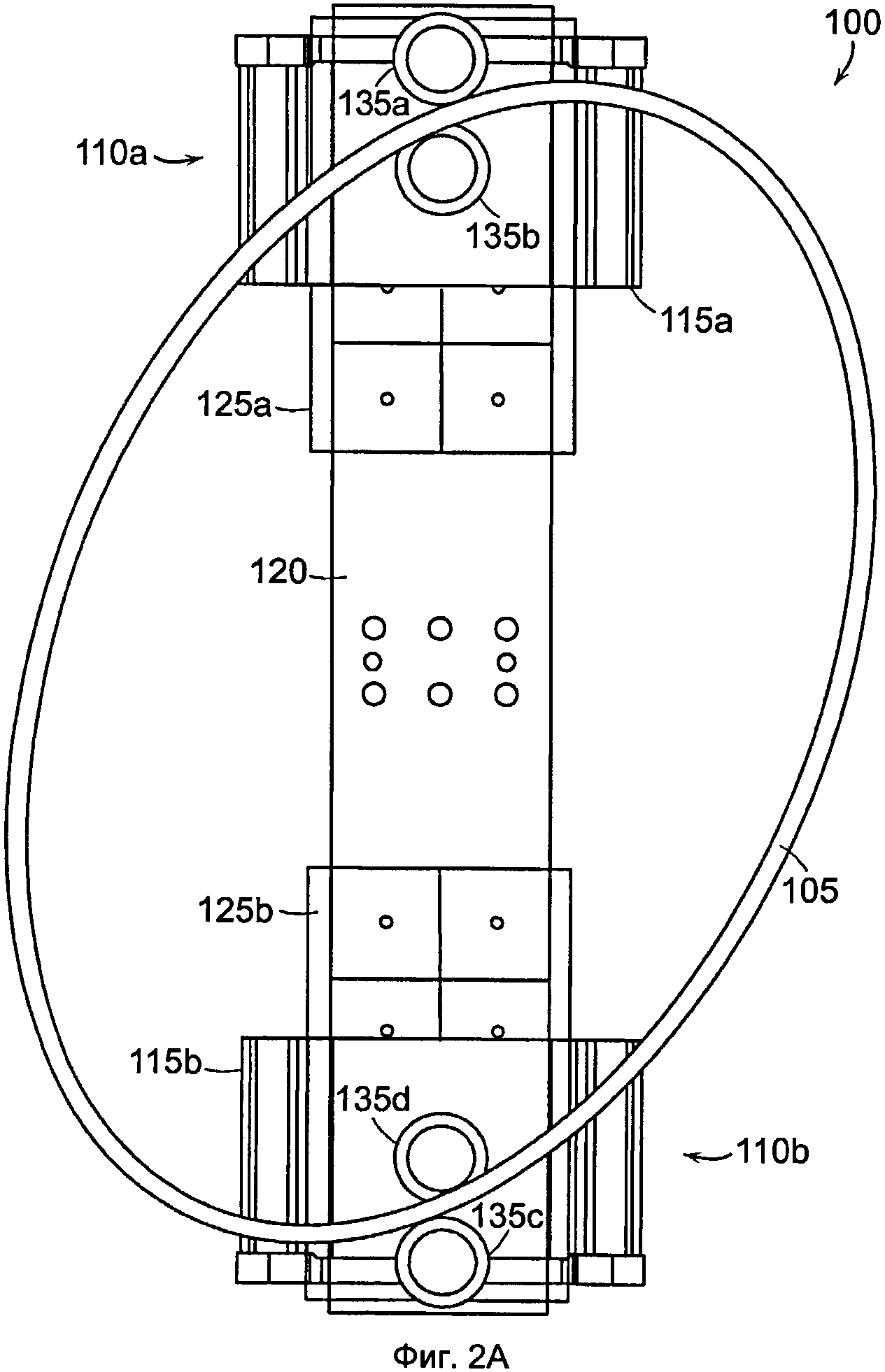
На фиг. 2А-2С показаны в действии компоненты вращательного устройства 100, которые содержат электромагнитные исполнительные механизмы 110а, 110b вращательного устройства (вместе с обмотками 115а, 115b и следящими элементами 135a-d) и кулачок 105, выполненный с возможностью перемещения относительно узла 120 магнитного статора (который содержит соответствующие магнитные статоры 125а, 125b). На этих чертежах не показаны кожухи, при помощи которых следящие элементы прикреплены к обмоткам. Как это показано на фиг. 2А-2С, возвратно-поступательное движение обмоток 115а, 115b в противоположном направлении приводит кулачок 105 во вращение, который, в свою очередь, побуждает вращаться колесо, связанное с кулачком 105. Обмотки 115а, 115b показаны на фиг. 2А на самом дальнем расстоянии друг от друга. На фиг. 2В показано, что обмотки 115а, 115b приближаются друг к другу, при этом обмотки 115а, 115b приводят кулачок 105 во вращение по часовой стрелке, что побуждает любое прикрепленное колесо также вращаться по часовой стрелке. В примерном устройстве, воздействующее на кулачок 105 усилие приложено за счет внешних следящих элементов 135а, 135с, прижимающихся снаружи к кулачку 105. На фиг. 2С показано, что обмотки 115а, 115b приближаются друг к другу еще ближе, что вызывает дополнительное вращение по часовой стрелке кулачка 105.
После того как обмотки 115а, 115b приблизятся друг к другу на самое близкое расстояние, причем кулачок 105, в этом случае, совершает поворот на 90 градусов, обмотки 115а, 115b начинают удаляться друг от друга и приводить кулачок 105 во вращение против часовой стрелки. Когда обмотки 115а, 115b удаляются друг от друга, внутренние следящие элементы 135b, 135d прикладывают усилие к кулачку 105, нажимая на кулачок 105 в направлении наружу. Следует иметь в виду, что несмотря на то, что на чертежах показан кулачок 105 овальной формы, кулачок 105 может иметь более сложную форму, например, может иметь четное число выступов, как это показано на фиг. 2D. Стороны каждого выступа могут быть выполнены, например, в виде синусоиды или участка спирали Архимеда. Число выступов определяет, сколько полных циклов должны совершить обмотки, чтобы кулачок совершил полный оборот. Кулачок с двумя выступами совершает полный оборот за два цикла обмоток. Кулачок с четырьмя выступами совершает полный оборот за четыре цикла обмоток. Кроме того, большее число выступов кулачка создает больший вращающий момент. Кроме приведения кулачка во вращательное движение, электромагнитные исполнительные механизмы могут действовать как генераторы за счет отбора тока из обмоток при вращении кулачка. Это также влияет на снижение вращательного движения кулачка, так как поглощается энергия вращательного движения кулачка. В применениях устройства в транспортном средстве, отбор тока из обмоток может действовать как механизм рекуперативного торможения транспортного средства. Так как устройство может действовать как генератор, вращение колеса, вызванное внешней силой, позволяет заряжать батареи транспортного средства. Например, транспортное средство может быть выполнено так, что по меньшей мере одно из его колес установлено на зарядном устройстве, которое побуждает колесо вращаться. Такое зарядное устройство может быть аналогично динамометру, который может быть установлен на или в полу. Однако в то время как транспортное средство побуждает динамометр вращаться, именно вращение зарядного устройства побуждает колесо транспортного средства вращаться, что побуждает электромагнитные исполнительные механизмы действовать как генераторы, чтобы заряжать батареи транспортного средства. Зарядное устройство может иметь, например, электропитание или топливное питание.
В некоторых устройствах, теплота, созданная за счет возвратно-поступательного движения обмоток 115а, 115b, может быть снижена за счет распыления на обмотки 115а, 115b жидкого холодоносителя, например, такого как вода. Это может быть осуществлено за счет распыления жидкости через отверстия 146 в магнитах магнитных статоров 125а, 125b, причем жидкость поступает на обмотки 115а, 115b, когда они проходят мимо отверстий 146. Жидкий холодоноситель может быть подведен к отверстиям 146 через каналы в узле 120 магнитного статора. Распыленная жидкость после использования может быть собрана для повторного использования или может быть превращена в газ и удалена за счет вентиляции из вращательного устройства.
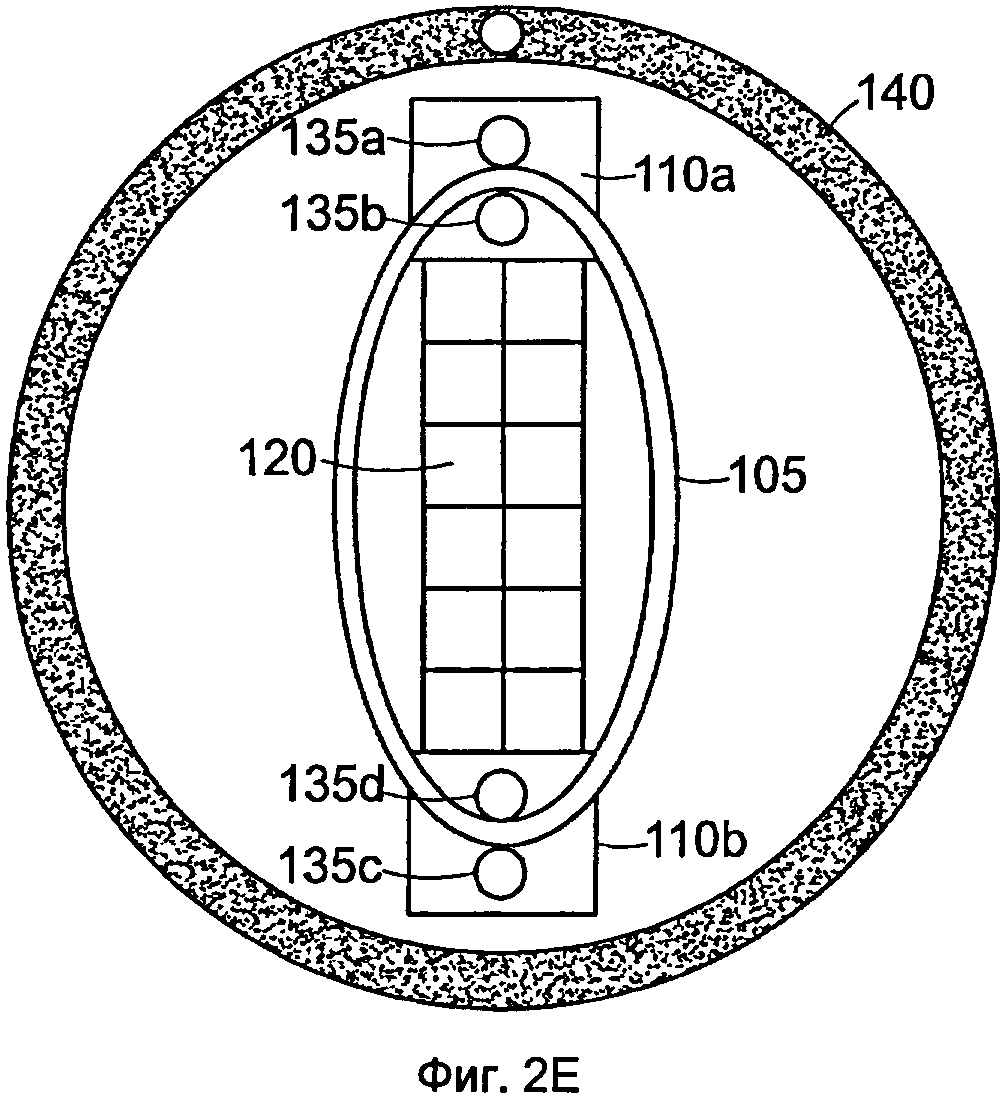
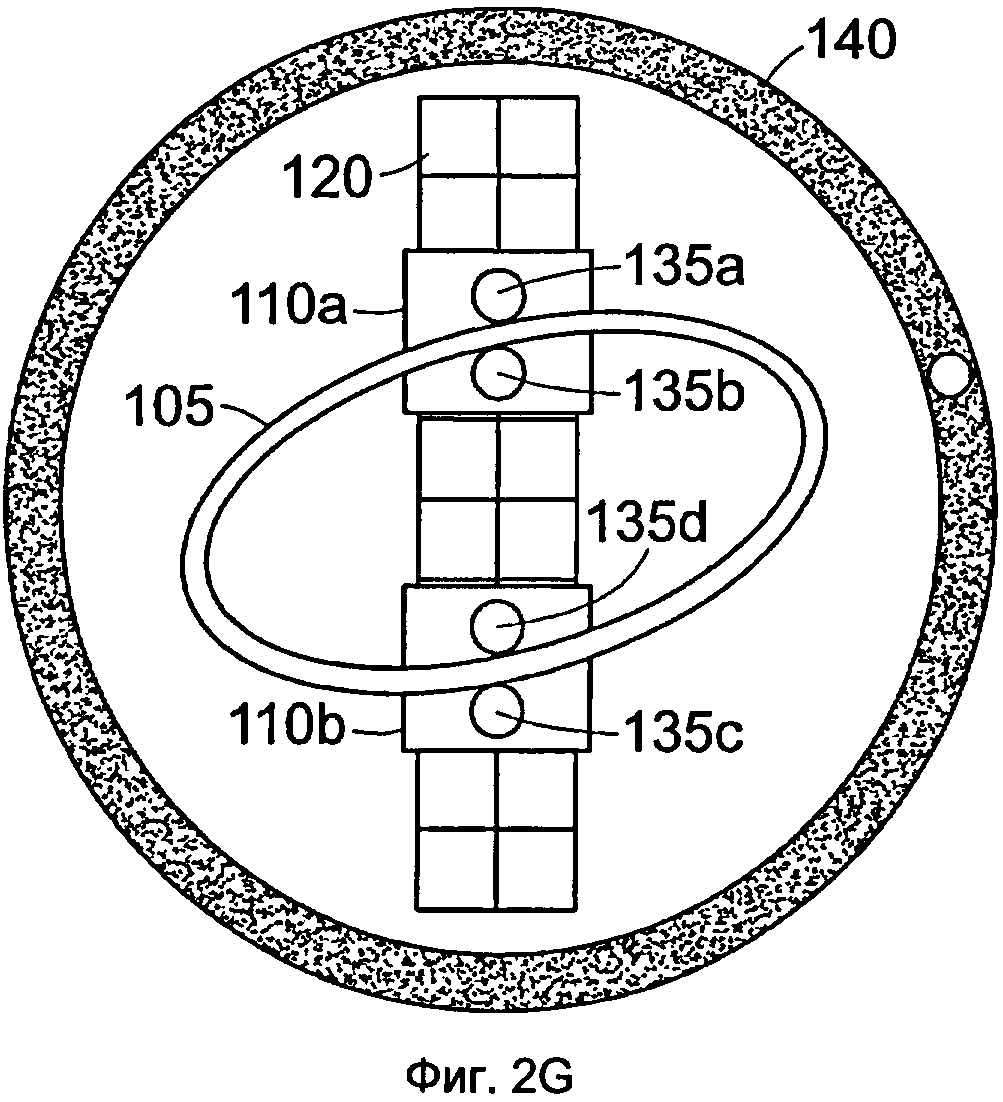
На фиг. 2Е-2Н также показаны компоненты примерного вращательного устройства в действии, но с колесом 140, которое прикреплено к кулачку 105 через пластину или другую аналогичную конструкцию (не показана). Белый кружок на колесе 140 показывает положение колеса в различных точках во время возвратно-поступательного движения электромагнитных исполнительных механизмов 110а, 110b. Как это показано белым кружком на фиг. 2Е-2Н, колесо 140 вращается вместе с вращающимся кулачком 105.
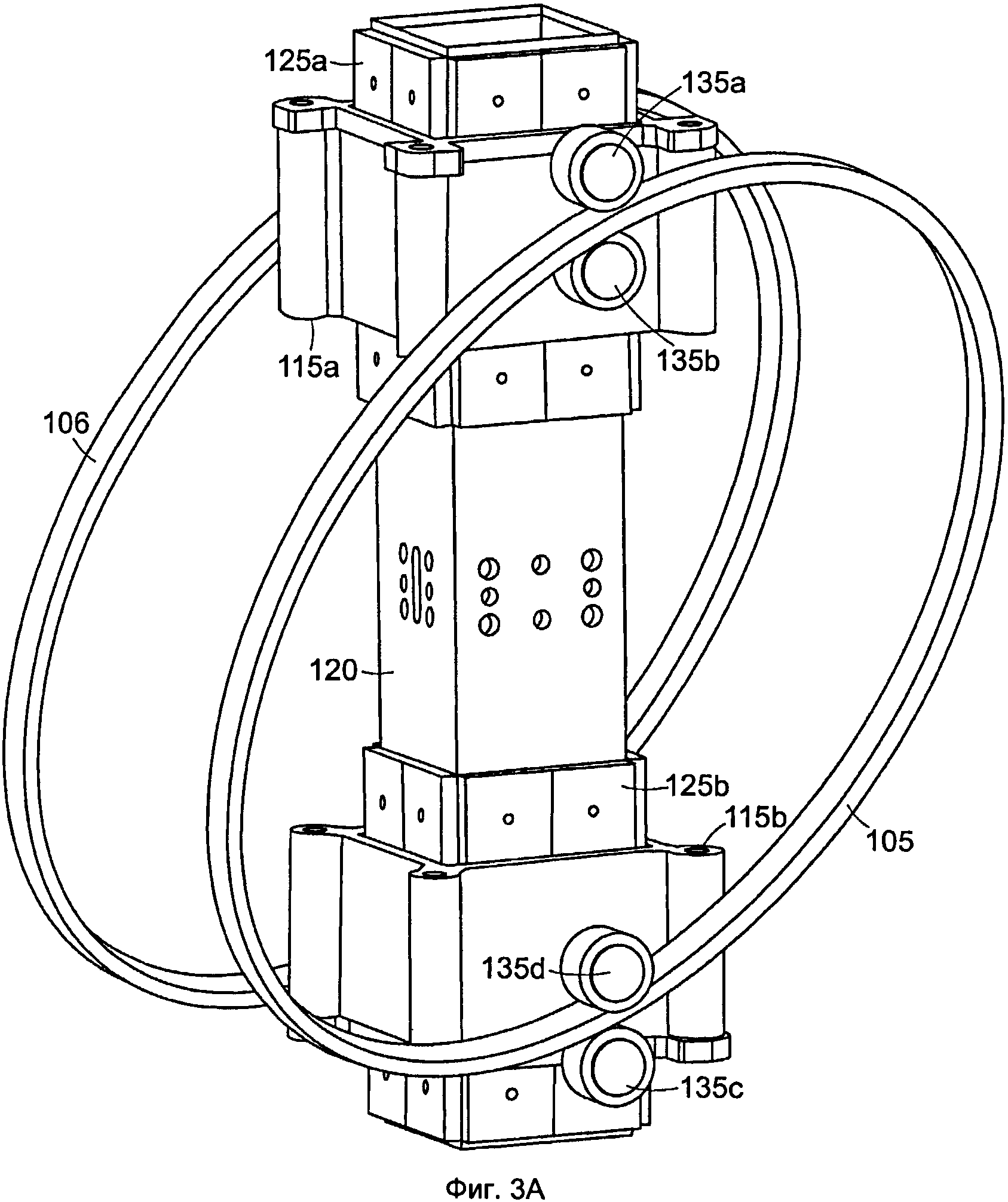
На фиг. 3А показано вращательное устройство, аналогичное устройству, показанному на фиг. 2А-2С, но с дополнительным кулачком 106 на другой стороне узла 120 магнитного статора. Возвратно-поступательное движение обмоток 115а, 115b также приводит второй кулачок 106 во вращательное движение, причем второй кулачок 106 может быть прикреплен к другой стороне колеса с использованием, например, другой кольцевой пластины. Узел 120 магнитного статора примерного устройство может иметь форму длинного прямоугольного сердечника из магнитно-проницаемого материала, с магнитным статорами 125а, 125b на каждом конце. В примерном устройстве, каждый магнитный статор 125а, 125b содержит магниты на всех четырех сторонах узла 120 магнитного статора. Прямоугольный сердечник, на котором в примерном устройстве закреплены магнитные статоры 125а, 125b, может создавать обратный путь для магнитного потока магнитных статоров 125а, 125b. На фиг. 3А также показаны обмотки 115а, 115b электромагнитных исполнительных механизмов, имеющие прямоугольную форму поперечного сечения и окружающие магнитные статоры 125а, 125b. Эта схема расположения позволяет эффективно использовать электромагнитные силы между обмотками 115а, 115b и магнитными статорами 125а, 125b.
На фиг. 3В показано вращательное устройство, аналогичное устройству, показанному на фиг. 3А, но с дополнительными магнитами 325а, 325b, расположенными снаружи от обмоток 115а, 115b. В показанном примерном устройстве, на каждом конце узла 120 магнитного статора предусмотрены дополнительные четыре магнитные матрицы, по одной на каждой стороне обмоток 315а, 315b прямоугольного поперечного сечения. Дополнительные магниты 325а, 325b позволяют создавать дополнительную электромагнитную силу. На фиг. 3В также показан дополнительный обратный путь 320 для магнитного потока дополнительных магнитов 325а, 325b.
На фиг. 4А показан держатель 145, к которому может быть прикреплен узел 120 магнитного статора, который содержит магниты и обратные пути магнитного потока. Держатель может быть частью шасси транспортного средства (не показано) или может быть прикреплен к нему. В частности, держатель 145 содержит внешнюю и внутреннюю пластины 445а, 445b ступицы, последняя из которых может быть прикреплена болтами к шасси транспортного средства. Подвод электрического тока в обмотки 115а, 115b может быть осуществлен с использованием электропроводных флексур (на фиг. 4А не показаны), которые идут от держателя 145 к обмоткам 115а, 115b. Эти флексуры позволяют подавать электрический ток в обмотки 115а, 115b даже тогда, когда обмотки совершают возвратно-поступательное движение вдоль узла 120 магнитного статора. Флексуры могут быть электрически связаны с источником электропитания (на фиг. 4А не показан), таким как батарея, закрепленным на держателе или расположенным на шасси транспортного средства, чтобы подавать электрический ток в обмотки 115а, 115b.
На фиг. 4В показано упрощенное поперечное сечение примерного вращательного устройства, прикрепленного к шасси 405 транспортного средства. Показанное на фиг. 4В устройство аналогично устройству, показанному на фиг. 1D-1F, но здесь некоторые компоненты условно удалены для упрощения. На фиг. 4В показан держатель 145, связанный с шасси 405 транспортного средства, и узел 120 магнитного статора. Также показаны кулачок 105, кулачковая пластина 170, колесо 140, подшипник 150 и электромагнитные исполнительные механизмы 110а, 110b. На держателе 145 закреплен электрический блок 410, который используют для подачи тока на электромагнитные исполнительные механизмы 110а, 110b через пару флексур 415а, 415b. На держателе 145 также закреплена батарея 420, предназначенная для хранения электроэнергии. Несмотря на то, что электрический блок 410 и батарея 420 установлены на держателе 145, следует иметь в виду, что электрический блок 410 и/или батарея 420 могут быть установлены на опорной конструкции 165 (фиг. 1D).
В примерном вращательном устройстве, управление электрическим блоком 410 может быть осуществлено при помощи контроллера 430, установленного на шасси 405 транспортного средства и присоединенного через волоконно-оптический кабель 435, идущий между контроллером 430 и электрическим блоком 410. Примерное вращательное устройство также содержит двунаправленную линию 440 электроснабжения, соединяющую электрический блок 410 и батарею 420. Во время работы в качестве мотора, мощность может поступать от батареи 420 в электрический блок 410 и на электромагнитные исполнительные механизмы 110а, 110b. Во время работы в качестве генератора, мощность может поступать от электромагнитных исполнительных механизмов 110а, 110b в электрический блок 410 и в батарею 420. Транспортное средство также может содержать зарядное устройство 425, предназначенное для зарядки батареи 420 с использованием внешнего источника питания (не показан), такого как электрическая розетка или бензиновый двигатель в случае гибридного транспортного средства. Во время такой зарядки, мощность поступает от внешнего источника питания в зарядное устройство 425 и в батарею 420 через магистраль 427, электрический блок 410 и двунаправленную линию 440 электроснабжения. Таким образом, батарея 420 может быть заряжена от внешнего источника питания или при помощи вращательного устройства, действующего как генератор.
За счет подачи тока в электромагнитные исполнительные механизмы 110а, 110b, электрический блок 410 может управлять возвратно-поступательным движением обмоток. Например, при движении, электрический блок 410 может управлять постоянным возвратно-поступательным движением обмоток. В случае применения в транспортном средстве, контроллером 430 может управлять водитель транспортного средства, причем, при воздействии водителя, контроллер 430 может подавать команды на электрический блок 410, например, чтобы вращательное устройство производило ускорение, торможение или изменяло направление. Кроме того, электрический блок 410 может быть сконфигурирован так, чтобы подавать электрический компонент на электромагнитные исполнительные механизмы 110а, 110b, чтобы приводить в движение их обмотки в одном и том же направлении, создавая таким образом вертикальное поступательное движение колеса 140. Любое поступательное движение колеса 140, вызванное за счет вращательного устройства или нет, может быть обнаружено при помощи электрического блока 410. В некоторых конфигурациях, электрический блок 410 может быть сконфигурирован так, чтобы поглощать энергию поступательного движения колеса, побуждая электромагнитные исполнительные механизмы 110а, 110b действовать как электрические генераторы и амортизаторы. Эта энергия может быть передана в батарею 420 для хранения.
Контроллер 430 может преобразовывать команды оператора (водителя) и данные датчиков в токи электропривода, приложенные к электромагнитным исполнительным механизмам 110. Далее приведены примеры того, как может быть осуществлено такое преобразование. Статическая подсистема вращательного устройства создает тяговое усилие, которое может содержать статическую ("DC") и динамическую ("АС") составляющие. DC, или силы низкой частоты, могут создавать подвеску (например, дорожный просвет в функции веса груза) и обеспечивать другие медленно изменяющиеся функции. Динамические силы могут обеспечивать приведение в движение, приспособление к изменениям местности и рулевое управление. Конструкция вращательного устройства также позволяет по сути разделять "синфазный режим" от "дифференциального режима." Например, пара колес с имеющими индивидуальное управление вращательными устройствами может работать в "синфазном режиме" для задания DC положения, и в" дифференциальном режиме" для приспособления к изменяющимся вводам оператора (например, к командам рулевого управления, торможения, педали газа (акселератора)) и к обратной связи от датчиков (например, от датчиков положения и дорожного просвета).
Контроллер 430 может иметь унифицированную конструкцию, основанную на модели символической математической системы, так что конфигурации, схемные решения, выборы оптимального соотношения, границы подсистемы, граничные условия и т.п., могут быть имитированы, изменены и оценены; и модели могут быть встроены в виртуальную среду, чтобы улучшить управление транспортным средством (с учетом опыта водителя). На высоком уровне, вращательное устройство (или все транспортное средство) может быть аппроксимировано системой уравнений

Функция u(t) управления может охватывать все атрибуты, желательные для оператора транспортного средства, в том числе эквивалент обычного рулевого колеса, педали управления (акселератора) и тормозной педали, а также может содержать новые функции, например, такие как подпрыгивание, встряхивание колеса, регулировка трения или сглаживание, изменение пространственного положения, модуляция динамики подвески и т.п., причем все это может быть осуществлено за счет нового вращательного мотора и за счет комбинаций этих моторов в новых транспортных средствах. Функции управления могут быть осуществлены, например, при помощи управляющего компьютера с контроллером 430. Управляющая программа в этом компьютере может реализовывать статическое уравнение (и его нелинейные, зависящие от времени и/или стохастические расширения), чтобы преобразовывать функцию управления в электрические сигналы возбуждения. Сигналы возбуждения могут быть сигналами постоянного тока, импульсными последовательностями с широтно-импульсной модуляцией, синтезированными колебаниями, многофазными сигналами переменного тока или другими сигналами, согласованными с импедансом обмоток возбуждения мотора и подключенной механической нагрузки. Таким образом, управляющий компьютер позволяет учитывать вводы оператора, всю динамику транспортного средства, сигналы обратной связи от датчиков и индикацию рассогласования и вычислять требуемые сигналы возбуждения в реальном времени. Контроллер 430 позволяет учитывать фазу обмоток возбуждения и угловое положение кулачков, то есть их положение в фазе, со сдвигом по фазе на 90 градусов, на 180 градусов или другое положение.
Широтно-модулированный сигнал возбуждения обмоток исполнительного механизма, когда напряжение питания включают и выключают в быстрой последовательности, чтобы обеспечить желательную временную функцию, имеет значительное преимущество по кпд по сравнению с пропорциональным управлением с линейными усилителями, с учетом низких потерь в переключательных усилителях мощности по сравнению с линейными усилителями, которые обычно имеют кпд на 50% меньше. Колебания с широтно-импульсной модуляцией могут быть синтезированы при помощи управляющего компьютера или при помощи его периферийных интерфейсных схем.
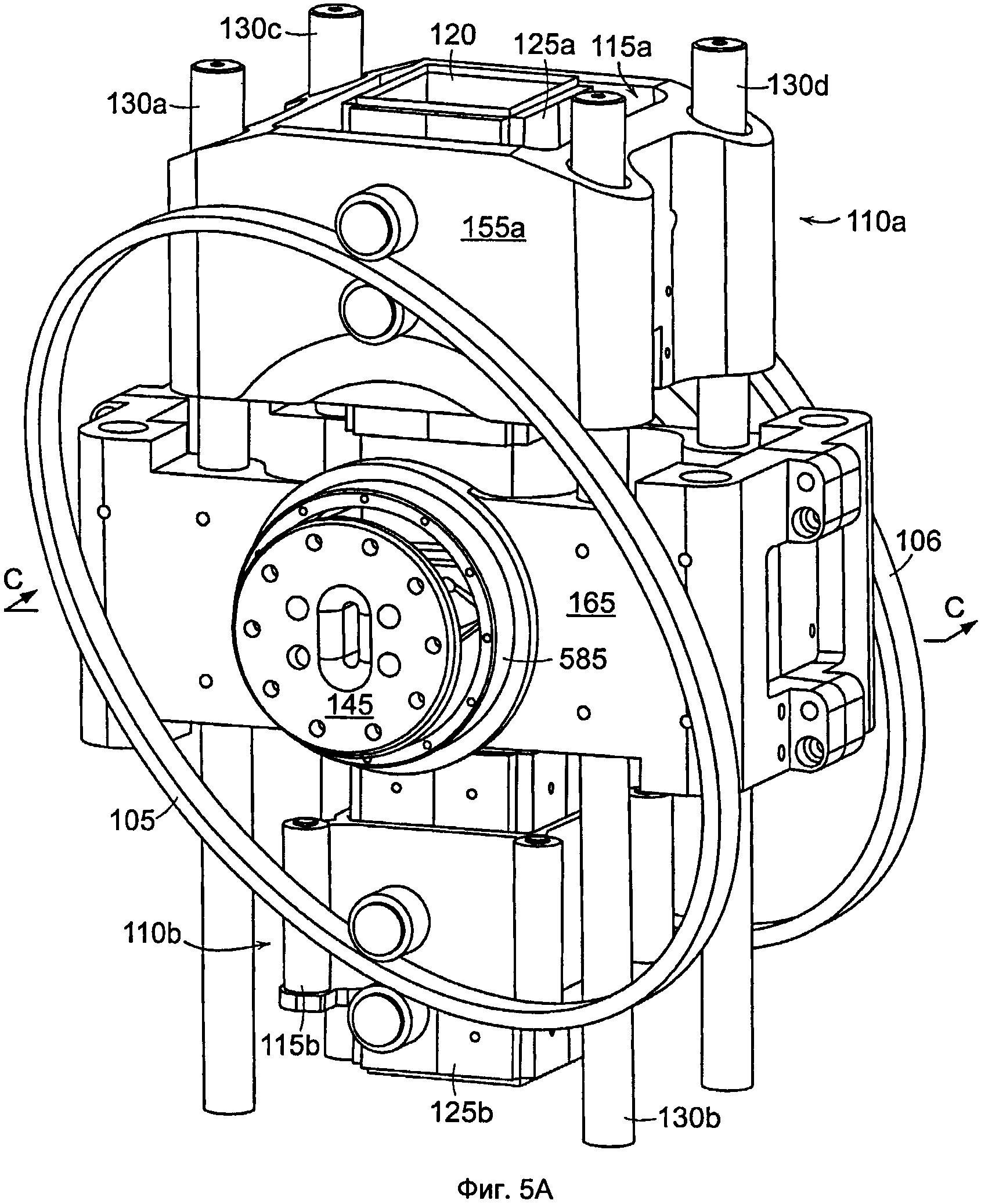
На фиг. 5А показана конструкция опоры 165 для подшипников. Вращательный подшипник (не показан), который поддерживает кулачковую пластину и, таким образом, колесо, установлен на фланце 585. Опора 165 для подшипников и электромагнитные исполнительные механизмы 110а, 110b с обмотками 115а, 115b удерживаются в вертикальном положении с использованием множество валов 130a-d. Если вращательное устройство используют в колесе транспортного средства, то опорная конструкция 165 позволяет удерживать подвешенным над землей узел 120 магнитного статора, держатель 145 и шасси транспортного средства (не показано), без использования электроэнергии. Без опорной конструкции 165 узел 120 магнитного статора, держатель 145 и шасси транспортного средства могут упасть на землю, когда ток не протекает через обмотки 115а, 115b. Таким образом, как опорная конструкция 165, так и электромагнитные исполнительные механизмы 110а, 110b создают подвеску для транспортного средства, однако электромагнитные исполнительные механизмы 110а, 110b требуют использования электроэнергии, чтобы поднять узел 120 магнитного статора, держатель 145 и шасси транспортного средства над землей. С другой стороны, опорная конструкция 165 может использовать для подвески флюидных амортизаторов (не показаны).
Опорная конструкция 165 также позволяет использовать несколько включенных последовательно флексур для подачи тока в обмотки. Например, один набор флексур может идти между держателем 145 и опорной конструкцией 165, а другой набор флексур может идти между опорной конструкцией 165 и обмотками 115а, 115b. Использование нескольких флексур является предпочтительным, когда опора 165 подшипника движется в вертикальном направлении. Во время такого вертикального движения опоры 165 подшипника и возвратно-поступательного движения обмоток 115а, 115b, один набор флексур может изгибаться с учетом вертикального движения опоры 165 подшипника, а другой набор флексур может изгибаться с учетом возвратно-поступательного движения обмоток 115а, 115b. Если использовать только один набор флексур (например, подключенных непосредственно между держателем 145 и обмотками 115а, 115b), то тогда потребуется больший изгиб флексур при вертикальном движении опоры 165 подшипника и возвратно-поступательном движении обмоток 115а, 115b, что может приводить к повышенным механическим напряжениям и износу флексур.
На фиг. 5В показаны узел 120 магнитного статора, держатель 145 и шасси транспортного средства, которые подняты относительно других компонентов вращательного устройства. Это может быть осуществлено за счет ввода электрического компонента в обмотки 115а, 115b, чтобы побуждать двигаться обе обмотки в одном и том же направлении (например, в этом случае вниз относительно узла статора и шасси) или за счет использования флюидных амортизаторов (не показаны) опорной конструкции 165, как это описано далее более подробно. Вертикальное движение обмоток 115а, 115b может происходить одновременно с их возвратно-поступательным движением или отдельно от него. Вертикальное движение позволяет, например, увеличивать или уменьшать высоту движения транспортного средства или действует как амортизатор (например, в случае ударов). Для увеличения высоты движения транспортного средства могут быть использованы флюидные амортизаторы или обмотки 115а, 115b, чтобы поднимать и удерживать поднятым шасси транспортного средства относительно колес. Что действовать как амортизатор, флюидные амортизаторы или обмотки 115а, 115b могут реагировать на ухабы на дороге, чтобы быстро поднимать колеса относительно шасси транспортного средства и затем возвращать их в нормальное положение. Кроме того, все четыре колеса транспортного средства могут быстро опускаться вниз относительно шасси транспортного средства, чтобы транспортное средство могло подпрыгнуть от земли. Таким образом, вращательное устройство может иметь по меньшей мере две степени движения: вращательное движение с противоположным возвратно-поступательным движением обмоток и линейное движение с движением обмоток в общем направлении. Эти степени движения могут быть осуществлены отдельно или вместе.
На фиг. 5С показан горизонтальный разрез устройства, где можно видеть, что опорная конструкция 165 окружает держатель 145, но не связана с ним. Также показаны множество валов 130a-d, связанных с опорной конструкцией, чтобы поддерживать соосность различных компонентов вращательного устройства. Также показаны множество флюидные амортизаторов 175a-d, описанных ниже.
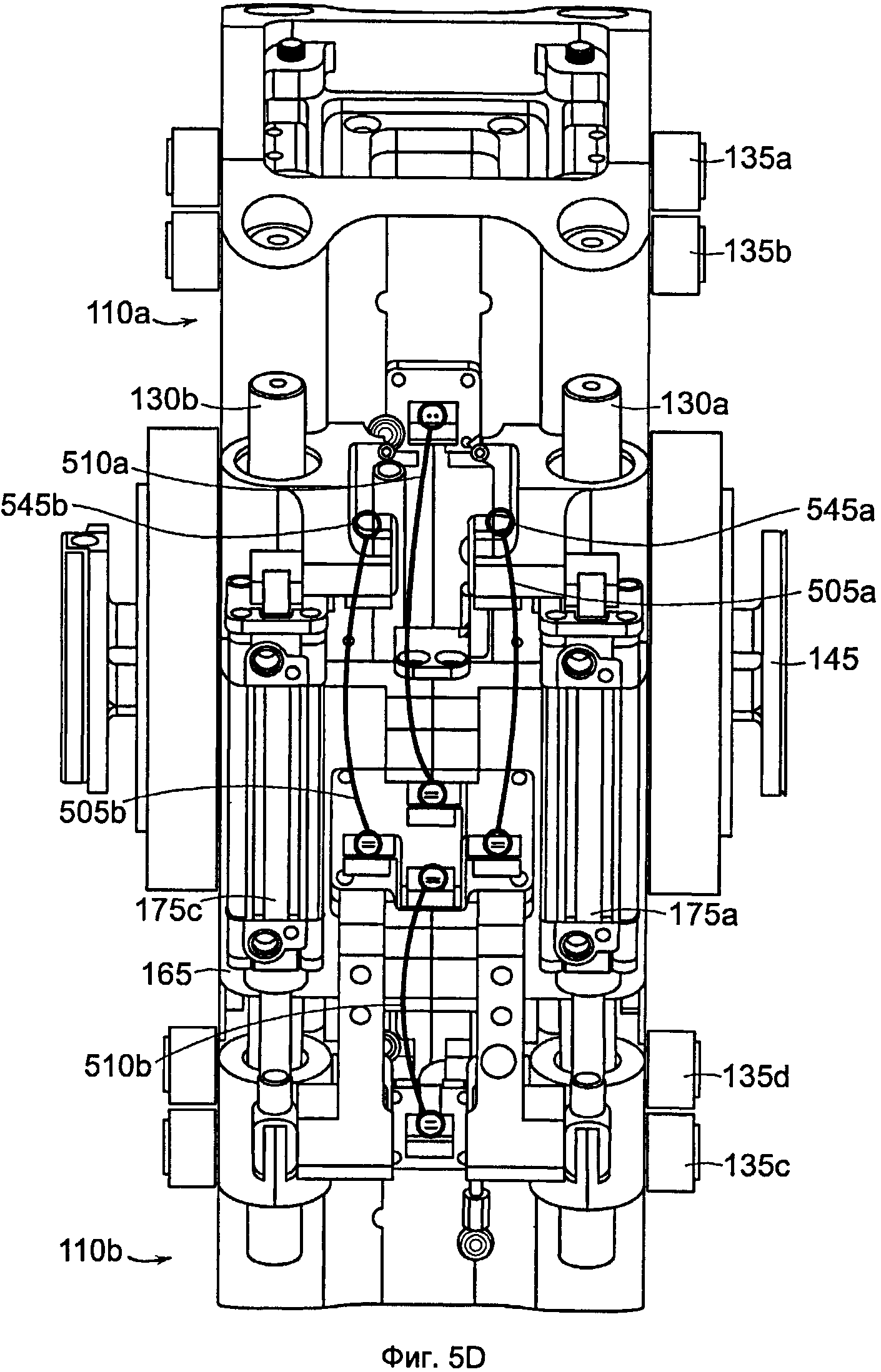
На фиг. 5D показан вид сбоку примерного вращательного устройства, которое содержит одну пару флексур 505а, 505b, идущих между компонентами 545а, 545b держателя 145 и опорной конструкцией 165, и другую пару флексур 510а, 510b, идущих между опорной конструкцией 165 и электромагнитными исполнительными механизмами 110а, 110b.
На фиг. 6А показан вращательный подшипник 150, который использован для соединения опорной конструкции 165 для подшипника с одним из кулачков 105. Внутреннее кольцо 650а подшипника соединено с опорой 165 для подшипника, а внешнее кольцо 650b подшипника соединено с конструкцией колеса (не показана), такой как кулачковая пластина, и, следовательно, с кулачком 105 и с внешним ободом колеса. Конструкцией колеса может быть пластина, множество спиц, решетка или другая соответствующая конструкция, что известно само по себе. Вращательный подшипник 150 не соединен непосредственно с держателем 145, а скорее соединен с ним, в примерном устройстве, через флюидный амортизатор. Другой вращательный подшипник (не показан) может быть использован для соединения опорной конструкции 165 с другим кулачком 105 на другой стороне вращательного устройства. Так как вращательный подшипник 150 вращательно соединен с опорной конструкцией 165 для подшипника, то внешний обод колеса, опорная конструкция 165 и колесо имеют одинаковое вертикальное положение относительно друг друга. За счет их постоянного вертикального положения относительно колеса валы 130a-d могут быть прикреплены к опорной конструкции 165, что не позволяет валам входить в контакт с колесом.
На фиг. 6В показана конструкция 605 колеса, соединяющая кулачок 105 примерного вращательного устройства с ободом колеса 140 транспортного средства. Показано, что кулачок 105 прикреплен к конструкции 605 колеса, а конструкция 605 колеса прикреплена (например, с использованием болтов) к ободу колеса 140. Таким образом, вращение кулачка 105 вызывает вращение конструкции 605 колеса и колеса 140.
На фиг. 7 показан горизонтальный разрез примерного вращательного устройства. Разрез проходит через один из электромагнитных исполнительных механизмов 155. Внутри электромагнитного исполнительного механизма 155 расположена обмотка 115а и компоненты узла 120 магнитного статора. В показанном устройстве, узел 120 магнитного статора содержит внутренний компонент 125а магнитного статора, который содержит множество магнитов, и внешний компонент 325а магнитного статора, который также содержит множество магнитов. Узел 120 магнитного статора также содержит внутренний обратный путь 725а магнитного потока для внутреннего компонента 125а магнитного статора и содержит внешний обратный путь 735а магнитного потока для внешнего компонента 325а магнитного статора. Как уже было указано здесь выше, внутренний компонент 125а магнитного статора и внутренний обратный путь 725а магнитного потока расположены внутри обмотки 115а, а внешний компонент 325а магнитного статора и внешний обратный путь 735а магнитного потока расположены снаружи от обмотки 115а. Также показано поперечное сечение кожуха электромагнитного исполнительного механизма 155, который окружает обмотку 115а и узел 120 магнитного статора и скользит вдоль длинной оси узла 120 магнитного статора за счет скольжения вдоль множества валов 130a-d. Кожух электромагнитного исполнительного механизма 155 позволяет удерживать обмотку 115а с использованием, например, четырех болтов, которые проходят через углы обмотки 115а прямоугольной формы.
На фиг. 8 показан другой горизонтальный разрез примерного вращательного устройства, но в виде сверху вниз. Как и на фиг. 7, показаны обмотка 115а, внутренний компонент 125а магнитного статора, внешний компонент 325а магнитного статора, внутренний обратный путь 725а магнитного потока, внешний обратный путь 735а магнитного потока, кожух 155а электромагнитного исполнительного механизма и валы 130а-d. Внутренний компонент 125а магнитного статора и внутренний обратный путь 725а магнитного потока установлены на внутренней конструкции 820 примерного узла магнитного статора. Болты могут быть пропущены через болтовые отверстия 815 в углах обмотки 115а, чтобы прикрепить обмотку 115а к кожуху 155а.
На фиг. 9 показана внутренняя конструкция 820 примерного узла магнитного статора. Держатель 145 (фиг. 4А) может быть прикреплен в точке 910, например, чтобы соединить конструкцию 820 с шасси транспортного средства. Каналы 905a-d могут быть использованы для протекания охлаждающей жидкости в узел магнитного статора, для распыления на обмотки через отверстия в магнитах.
На фиг. 10 показан еще один горизонтальный разрез примерного вращательного устройства. Разрез проходит через средину устройства и позволяет показать внутреннюю конструкцию 820 узла магнитного статора, держатель 145, внутренний обратный путь 725а магнитного потока и внешний обратный путь 735а магнитного потока. Разрез также позволяет показать канал 1005, который используют для доступа во внутреннюю часть узла магнитного статора, например, для прокладки кабелей или для протекания охлаждающей жидкости.
На фиг. 11 показан еще один горизонтальный разрез вращательного устройства, аналогичный показанному на фиг. 10, но в точке немного выше горизонтального разреза на фиг. 10. Кроме канала 1005 для прокладки кабелей или для протекания охлаждающей жидкости, здесь показаны каналы (отверстия) 1105a-d для ввода крепежных деталей, таких как винты.
На фиг. 12А показан вертикальный разрез примерного вращательного устройства. Здесь можно видеть, как опорная конструкция, показанная на фиг. 5А и 5В, может быть со скольжением прикреплена к узлу магнитного статора и к держателю 145 с использованием дополнительных валов 1230а, 1230b и амортизаторов 175а, 175b. Как это показано на фиг. 12А, опорная конструкция 165 может быть связана с нижним стержнем амортизатора 175а. В частности, соединительная тяга 1215а, прикрепленная в точке 1225а к нижнему концу стержня 1220а, соединена с опорой в точке 1205. Верхний стержень флюидного амортизатора 175а может быть соединен с держателем 145 устройства, который может быть частью шасси транспортного средства. Держатель 145 соединен с плечом 1240а подвески в точке 1210. Вал 1230а, прикрепленный к опоре 165, скользит через плечо 1240а подвески у противоположных концов. Верхний стержень амортизатора 175а прикреплен к плечу 1240а подвески в точке 1235а.
Амортизаторами 175а, 175b может быть пневматическая подвеска, такая как поршень с противоположными газовыми камерами. Давление газа в каждой из камер выше и ниже поршня можно также динамически регулировать, чтобы изменять положение узла магнитного статора и держателя 145 (например, перемещать их вверх или вниз) или чтобы изменять жесткость амортизаторов 175а, 175b. Для изменения положения узла магнитного статора и держателя 145, давление в газовых камерах можно регулировать так, чтобы камеры имели разные давления. Например, если каждый из флюидных амортизаторов 175а, 175b содержит верхнюю и нижнюю камеры, то большее давление должно быть приложено к верхней камере, чтобы перемещать узел магнитного статора и держатель 145 в верхнем направлении, и большее давление должно быть приложено к нижней камере, чтобы перемещать узел магнитного статора и держатель 145 в нижнем направлении. Для изменения жесткости амортизаторов 175а, 175b, одинаковое давление может быть добавлено в верхнюю и нижнюю камеры или удалено из них. Если вращательное устройство используют в колесе транспортного средства, то изменение положения узла магнитного статора и держателя 145 может изменять высоту движения транспортного средства, а изменение жесткости амортизаторов 175а, 175b может изменять жесткость подвески транспортного средства.
В разрезе на фиг. 12А также показана внутренняя часть узла магнитного статора. Здесь можно видеть примерное расположение обмотки 115b электромагнитного исполнительного механизма внутри компонента 125b магнитного статора и снаружи от компонента 325b магнитного статора. Также можно видеть обратный путь 735b магнитного потока снаружи от компонента 325b магнитного статора.
На фиг. 12B-12D показан пример перестраиваемой пневматической подвески. На фиг. 12В показано, что подвеска 175а содержит поршень 1276 и противоположные камеры 1277а, 1277b, позволяющие прикладывать соответствующие противоположные пневматические давления к противоположным сторонам 1278а, 1278b поршня 1276. Примерная подвеска 175а содержит верхнюю камеру 1277а и нижнюю камеру 1277b. Также показан пневматический контроллер 1279, который независимо регулирует пневматические давления в камерах 1277а, 1277b.
Давления в камерах 1277а, 1277b можно регулировать, чтобы изменять относительные положения поршня 1276 и камер 1277а, 1277b за счет изменения давлений. Например, как это показано на фиг. 12С, более высокое давление в нижней камере 1277b подвески 175а, по сравнению с верхней камерой 1277а, прикладывает большее усилие к нижней стороне 1278b поршня 1276, что побуждает поршень 1276 и нижнюю камеру 1277b перемещаться в направлении удаления друг от друга. Как это показано на фиг. 12D, более высокое давление в верхней камере 1277а, по сравнению с нижней камерой 1277b, прикладывает большее усилие к верхней стороне 1278а поршня 1276, что побуждает поршень 1276 и верхнюю камеру 1277а перемещаться в направлении удаления друг от друга. Если подвеска 175а является частью транспортного средства, это движение может изменять высоту движения транспортного средства или направление движения транспортного средства, в зависимости от того, что связано с шасси транспортного средства - камеры 1277а, 1277b или поршень 1276. Один из компонентов группы, которая включает в себя камеры 1277а, 1277b и поршень 1276, может быть заземлен, в то время как другой компонент может быть соединен с шасси транспортного средства.
В дополнение к изменению положения поршня 1276, давления в камерах 1277а, 1277b можно регулировать для изменения жесткости подвески 175а за счет добавления равных давлений в камеры 1277а, 1277b или удаления равных давлений из них. Добавление равных давлений в обе камеры 1277а, 1277b повышает жесткость подвески 175а, а удаление равных давлений из обеих камер 1277а, 1277b снижет жесткость подвески 175а. Если подвеска 175а является частью транспортного средства, то изменение жесткости подвески 175а позволяет изменять жесткость движения транспортного средства.
На фиг. 13А показано примерное вращательное устройство, которое включает в себя несколько описанных выше компонентов. Вращательное устройство содержит, например, кулачок 105, два противоположных электромагнитных исполнительных механизма (содержащие примерный кожух 155а и обмотку 115b), узел магнитного статора (содержащий примерный внутренний компонент 125b магнитного статора, внешний компонент 325b магнитного статора и внешний обратный путь 73 5b магнитного потока для внешнего компонента 325b магнитного статора), держатель 145, плечи 1240а, 1240b подвески, следящие элементы 135a-d, опорную конструкцию 165, вращательный подшипник 150, валы 130а, 130b, 1230а, 1230b и флюидные амортизаторы 175а, 175b.
На фиг. 13В показано вращательное устройство, аналогичное показанному на фиг. 13А, но в котором использованы флюидные амортизаторы 175а, 175b, чтобы поднять узел магнитного статора и держатель 145, например, за счет создания большего давления в верхней камере внутри каждого из флюидных амортизаторов 175а, 175b. Как это показано на фиг. 13В, флюидные амортизаторы 175а, 175b, плечи 1240а, 1240b подвески, узел магнитного статора и держатель 145 имеют более высокое вертикальное положение, чем на фиг. 13А.
На фиг. 14А-14С показана конструкция примерной обмотки одного из электромагнитных исполнительных механизмов. Вместо изготовления из одного куска материала, обмотка может содержать несколько плоских сегментов обмотки, уложенных друг на друга в пакет и электрически соединенных последовательно. На фиг. 14А показаны четыре сегмента обмотки, которые соединены для образования одной обмотки 1400. Обмотка данного электромагнитного исполнительного механизма может содержать несколько таких сегментов обмотки. На фиг. 14В показан один из сегментов 1401 обмотки. На фиг. 14С показан вид 1405 с пространственным разделением сегментов обмотки, показанной на фиг. 14А. Каждый сегмент 1410a-d примерной обмотки может быть выполнен в виде плоской металлической детали U-образной формы, образованной, например, за счет процесса штамповки или травления. Сегменты 1410a-d могут быть собраны в конфигурацию, показанную на фиг. 14С, чтобы образовать законченную обмотку.
На фиг. 14С показаны четыре U-образных сегмента 1410а-d обмотки, которые уложены друг на друга, причем каждый сегмент повернут на 270 градусов (или на 90 градусов, в зависимости от направления вращения) относительно соседнего сегмента обмотки в пакете сегментов обмотки. При укладке в пакет сегментов 1410а-d с поворотом друг относительно друга сегменты 1410а-d могут быть расположены так, что начальный конец 1425 верхнего сегмента 1410b обмотки в пакете будет сопряжен с завершающим концом 1420 находящегося непосредственно под ним в пакете сегмента 1410а обмотки. Обмотка, которая содержит четыре имеющих U-образную форму сегмента 1410а-d обмотки, например, образует три витка, чтобы заканчиваться в том же самом относительном положении, что и положение, где она начинается (концы 1415 и 1450).
Электрический ток может протекать через обмотку, например, от начального конца самого нижнего сегмента обмотки в пакете до завершающего конца самого верхнего сегмента обмотки в пакете. В примерной обмотке, после ее сборки, электрический ток 1455 может протекать через обмотку, например, от начального конца 1415 до завершающего конца 1450. Ток 1415 может начинаться в точке 1415 и протекать против часовой стрелки вокруг сегмента 1410а до точки 1420. Из точки 1420 ток протекает в точку 1425, так как точки 1420 и 1425 находятся в электрическом контакте друг с другом после сборки, как это показано, например, на фиг. 14А. Из точки 1425 ток 1415 протекает против часовой стрелки вокруг сегмента 1410b до точки 1430 и протекает в точку 1435, аналогично описанному здесь выше. Из точки 1435 ток 1415 протекает против часовой стрелки вокруг сегмента 1410 с до точки 1440, протекает в точку 1445 и протекает против часовой стрелки вокруг сегмента 1410d до точки 1450. При соединении с другими сегментами ток может протекать из одного сегмента в следующий сегмент длинной обмотки. В общем, способ изготовления такой электрической обмотки предусматривает изготовление нескольких плоских сегментов обмотки, укладку вместе нескольких сегментов обмотки в пакет, в котором каждый сегмент обмотки повернут относительно соседнего сегмента обмотки, и соединение и закрепление сегментов обмотки вместе, чтобы образовать электрическую обмотку.
Чтобы исключить рассеяние электрического тока от описанного выше пути, каждый сегмент может быть покрыт слоем электроизоляционного материала, за исключением поверхностей, между которыми должен протекать ток, такими как верхняя поверхность точки 1420 и нижняя поверхность точки 1425. Альтернативно, вместо использования покрытия, слои электроизоляционного материала могут быть введены между сегментами обмотки. Когда сегменты 1410а-d обмотки собирают, чтобы образовать обмотку, показанную на фиг. 14А, используют крепежные детали, такие как болты, которые могут быть пропущены через отверстия, показанные в точках 1415, 1420, 1425, 1430, 1435, 1440, 1445 и 1450. Сегменты 1410a-d также могут быть соединены при помощи пайки, в дополнение к соединению при помощи крепежных деталей или вместо него. При сборке сегментов 1410a-d могут оставаться зазоры между некоторыми из указанных точек. Для плотной стяжки сегментов 1410a-d обмотки вместе могут быть введены электроизоляционные прокладки для заполнения указанных зазоров. Например, при сборке сегментов 1410a-d может оставаться зазор между точками 1415 и 1450, и одна или несколько прокладок могут быть введены между точками 1415 и 1450, чтобы заполнить зазор. С другой стороны, никакого зазора не должно быть между точками 1420 и 1425. Крепежные детали также могут быть изолированы, например, с использованием трубок, дающих усадку при нагревании.
Сегменты 1410a-d обмотки могут быть механически и электрически соединены вместе с использованием болтов, которые пропускают через отверстия, выполненные в сегментах 1410a-d, причем эти отверстия расположены снаружи от траектории обмотки, так что может быть образована непрерывная, винтовая, плоская обмотка. Изготовление сегментов обмотки с постоянной толщиной является простым и дешевым, однако, при постоянной толщине сегментов, соединения сегментов обмотки могут происходить снаружи от траектории обмотки, так что промежуточные сегменты не перекрывают точки соединения. Форма точек 1415, 1420, 1425, 1430, 1435, 1440, 1445, 1450 соединения может быть выбрана так, чтобы имелись адекватные контактные области для хорошего механического соединения, обеспечивающие приемлемое контактное сопротивление между сегментами. Сегменты обмотки могут иметь гальваническое покрытие, например, покрытие золотом или никелем, чтобы дополнительно снизить контактное сопротивление.
Точки 1415, 1420, 1425, 1430, 1435, 1440, 1445, 1450 соединения могут быть подняты или опущены, так чтобы траектория обмотки продолжалась гладким образом, без каких-либо резких выступов или точек создания механических напряжений, и с соединением по центру уровня соединения. Например, для соединения между сегментами 1410а и 1410b точка 1420 может быть опущена, а точка 1425 может быть поднята, как это показано на фиг. 14С. Величина подъема или опускания точек может составлять половину толщины сегментов 1410a-d. Общая винтовая траектория может быть задана за счет небольших наклонов или за счет непрерывного наклона, предусмотренного в опорных конструкциях, расположенных непосредственно выше и ниже обмотки. Опорные конструкции могут быть зажаты на обмотке при затяжке болтов и могут также иметь начальные уровни для четырех болтов, так что может быть образована обмотка с плавными переходами и минимальной деформацией сегментов 1410a-d при затяжке болтов. Аналогичный подход возможен и при использовании трех болтов и при более частом повторе сегментов, возможно образующих обмотку треугольной формы. Возможно также использование и большего числа болтов. Также могут быть образованы сегменты, создающие кольцевую траекторию, а не прямоугольную траекторию.
Вместо наличия поднятых и опущенных секций в сегментах 1410a-d обмотки точки 1415, 1420, 1425, 1430,1435, 1440, 1445, 1450 соединения могут иметь половинную толщину, так что при соединении двух сегментов вместе получают полную толщину обмотки, при этом траектория обмотки будет плавно продолжаться. При этом типе соединения, перекрытие промежуточных сегментов может происходить на большей площади. Кроме того, в некоторых устройствах, дополнительные механические напряжения и деформации, созданные за счет отсутствия подъема и опускания точек 1415, 1420, 1425, 1430, 1435, 1440, 1445, 1450 соединения сегментов 1410a-d, могут быть приемлемыми, а затяжка болтов позволяет придать сегментам 1410a-d их окончательную форму.
На фиг. 15 показано другое примерное вращательное устройство 1500 внутри колеса. Как и описанные здесь ранее устройства, устройство 1500 может быть прикреплено к шасси транспортного средства. Устройство 1500 содержит кулачок 1505, два противоположных электромагнитных исполнительных механизма 1510а, 1510b, узел 1520 магнитного статора (который содержит магнитные статоры 1515а, 1515b), опорную конструкцию 1525 и флюидные амортизаторы 1530а, 1530b. Вращательное устройство, расположенное внутри колеса, может быть прикреплено к колесу через кулачок 1505, как это описано далее более подробно.
На фиг. 16А показано примерное вращательное устройство 1500, расположенное внутри шины колеса, причем некоторые другие компоненты условно удалены. Устройство 1500 аналогично описанным здесь выше устройствам, но содержит центральный диск 1635, расположенный между парами электромагнитных исполнительных механизмов 1510а, 1510b, 1610а, 1610b и двумя узлами 1520, 1620 магнитного статора. Каждый из узлов 1520, 1620 магнитного статора содержит два магнитных статора 1515а, 1515b, 1615а, 1615b, которые имеют обратные пути 1640a-d магнитного потока и магниты (например, 1630а, 1630b). Кожухи, окружающие обмотки электромагнитных исполнительных механизмов 1510а, 1510b, 1610а, 1610b, не показаны. Каждая обмотка совершает возвратно-поступательное движение вдоль четырех магнитных матриц, которые, как уже было указано здесь выше, могут содержать несколько магнитов. Две магнитные матрицы расположены внутри обмотки (например, образуют внутренний компонент 1630b магнитного статора) и две магнитные матрицы расположены снаружи от обмотки (например, образуют внешний компонент 1630а магнитного статора). Каждый набор магнитов установлен у обратного пути 1640a-d магнитного потока.
Диск 1635 содержит два кулачка, по одному на каждой стороне диска 1635. Каждый кулачок примерного устройство выполнен в виде канавки, которая имеет внутреннюю поверхность 1605а и внешнюю поверхность 1605b. С электромагнитными исполнительными механизмами 1510а и 1510b соединены две пары следящих элементов 1625а, 1625b, причем различные следящие элементы каждой пары взаимодействуют с соответствующими поверхностями 1605а, 1605b кулачка. Электромагнитные исполнительные механизмы 1610а и 1610b аналогично соединены с соответствующими следящими элементами. Когда обмотки движутся в направлении друг к другу, один из следящих элементов каждого электромагнитного исполнительного механизма 1510а, 1510b оказывает давление на внутреннюю поверхность 1605а кулачка. Когда обмотки движутся в направлении друг от друга, другой следящий элемент оказывает давление на внешнюю поверхность 1605b кулачка.
На фиг. 16В показан другой вид примерного вращательное устройство 1500. Можно видеть, что соответствующие пары электромагнитных исполнительных механизмов (пара 1510а, 1510b и пара 1610а, 1610b) находятся в различных фазах возвратно-поступательного движения. В примерном устройстве это происходит потому, что кулачки на каждой стороне диска 1635 вращательно смещены друг от друга, например, на 45 градусов. Это помогает исключить остановку исполнительных механизмов в точке на кулачках, из которой трудно вновь начать движение. Таким образом, когда одна пара исполнительных механизмов останавливается в "мертвой точке" своего соответствующего кулачка, другая пара исполнительных механизмов не будет находиться в мертвой точке. Альтернативно, если кулачки не смещены друг от друга или если используют только один кулачок, контроллер может управлять вращением кулачка так, что исполнительные механизмы не будут останавливаться в мертвой точке. На фиг. 16В также показана схема расположения обмоток и компонентов магнитного статора. Например, компоненты 1630b и 1630 с магнитного статора расположены внутри обмотки исполнительного механизма 1610а, а компоненты 1630а и 1630d магнитного статора расположены снаружи от обмотки.
На фиг. 16С показаны два вращательно смещенных кулачка 1505,1606. Кулачки 1505, 1606 могут быть частью диска 1635 или могут быть установлены на нем. Один кулачок 1505 может находиться на одной стороне диска 1635, а другой кулачок 1606 может находиться на противоположной стороне, что показано пунктиром. В некоторых устройствах, кулачки могут быть смещены, например, на 45 градусов. Кулачки 1505, 1606 могут иметь любое равное число выступов. Кулачки, которые имеют по два выступа, могут быть смещены, например, на 45 градусов. Кулачки, которые имеют по четыре выступа, могут быть смещены, например, на 22,5 градуса.
На фиг. 16D показан вертикальный разрез диска 1635 с двумя вращательно смещенными кулачками, каждый из которых имеет соответственно внутреннюю поверхность 1605а, 1605 с и внешнюю поверхность 1605b, 1605d. За счет смещения внутренние поверхности 1605а, 1605 с не совпадают друг с другом. Аналогично, внешние поверхности 1605b, 1605d также не совпадают друг с другом.
На фиг. 16Е показано, что внутренняя и внешняя поверхности 1605а, 1605b кулачка могут иметь сложную форму, например, с четным числом выступов. Как уже было указано здесь выше, стороны каждого выступа могут иметь, например, форму синусоиды или участков спирали Архимеда. Каждая из внутренней и внешней поверхностей 1605а, 1605b, показанных на фиг. 16Е, имеет четыре выступа.
На фиг. 17А показано, как диск 1635 примерного вращательное устройство может быть связан с ободом 1705 колеса. Обод 1705 может быть выполнен в виде одной детали, к которой диск 1635 может быть прикреплен с использованием крепежных деталей, таких как болты, вдоль внутреннего кольца 1715. Альтернативно, обод 1705 может быть выполнен в виде двух деталей 1710а, 1710b, которые болтами соединены друг с другом вдоль кольца 1715. При соединении вместе, две детали 1710а, 1710b образуют полный обод 1705 с внутренним кольцом 1715. Затем шина может быть установлена на ободе 1705. На фиг. 17В показано, как диск 1635 может быть прикреплен к внутреннему кольцу 1715 диска 1635.
На фиг. 18 показаны две опорные конструкции 1525, 1825, соединяющие соответствующие узлы 1520, 1620 магнитного статора с электромагнитными исполнительными механизмами 1510а, 1510b, 1610а, 1610b через множество валов и флюидные амортизаторы 1530а, 1530b, 1830а. Опорная конструкция 1525 со скольжением присоединена к узлу 1520 магнитного статора с использованием флюидных амортизаторов 1530а, 1530b. Флюидный амортизатор 1530а может быть связан с опорной конструкцией 1525, например, в точке 1810 и присоединен к узлу магнитного статора 1820а в точке 1805. Аналогично, опорная конструкция 1825 со скольжением присоединена к узлу магнитного статора 1620 с использованием флюидного амортизатора 1830а и соответствующего флюидного амортизатора (не показан) на дальней стороне устройства.
На фиг. 19А-19С показано примерное расположение компонентов узла магнитного статора. Обратимся к рассмотрению фиг. 19А, на которой магнитная матрица 1910а представляет собой внешнюю магнитную матрицу, а магнитная матрица 1910b представляет собой внутреннюю магнитную матрицу. Обратный тракт 1640а полного магнитного потока поддерживает магнитные матрицы. Специфическая геометрическая форма примерного обратного тракта 1640а позволяет образовать обратный тракт 1640а с использованием рентабельного процесса экструзии. В частности, четыре тракта магнитного потока могут быть соединены вместе у центрального стыка и на двух торцевых стыках, причем множество таких конструкций могут быть вырезаны из одной экструзионной заготовки. На фиг. 19А также показана базовая конструкция 1920а, на которой могут быть установлены компоненты магнитного статора.
На фиг. 19В показан компонент 1905, который используют для подвода к магнитам жидкого холодоносителя, который может быть распылен на обмотки, когда они проходят мимо магнитов. Жидкий холодоноситель может поступать из базовой конструкции 1920а к магнитным матрицам 1910а, 1910b через компонент 1905, который закреплен вдоль кромки обратного тракта 1640а. Жидкость может протекать через отверстие 1915 в базовой конструкции 1920а и через канал 1917 компонента 1905 в камеру 1925, расположенную в зазоре между частями обратного тракта 1640а. Из камеры 1925 жидкий холодоноситель может быть направлен через отверстия в магнитных матрицах 1910а, 1910b и распылен на обмотки, когда они совершают возвратно-поступательное движение мимо отверстий.
На фиг. 19С показаны четыре магнитных статора, которые связаны с центральным держателем 1945. Если вращательное устройство используют в колесе транспортного средства, то держатель 1945 может быть связан, например, с шасси транспортного средства.
На фиг. 20A-20G показана конструкция примерной обмотки одного из электромагнитных исполнительных механизмов. На фиг. 20А показана вся обмотка 2000 электромагнитного исполнительного механизма. Следует иметь в виду, что обмотка 2000 может быть образована из нескольких обмоток меньшего размера. На фиг. 20В показаны четыре сегмента обмотки, которое объединены в одну обмотку 2005. Несколько таких сегментов могут быть объединены в одну большую обмотку 2000, показанную на фиг. 20А. На фиг. 20С приведено перспективное изображение 2010 с пространственным разделением деталей обмотки 2005, показанной на фиг. 20В. Каждым сегментом 2015, 2020, 2025, 2030 примерной обмотки может быть плоская металлическая деталь, образованная, например, при помощи процесса штамповки или травления. Сегменты 2015, 2020, 2025, 2030 могут быть собраны в конфигурацию, показанную на фиг. 20С, чтобы образовать полную обмотку. После сборки обмотки электрический ток 2075 может протекать через обмотку, например, от начальной точки 2035 до конечной точки 2070. Например, ток 2075 может начинаться в точке 2035 и протекать против часовой стрелки вокруг сегмента 2015 до точки 2040. Из точки 2040 ток протекает в точку 2045, так как точки 2040 и 2045 находятся в электрическом контакте друг с другом после соединения сегментов. Из точки 2045 ток 2075 протекает против часовой стрелки вокруг сегмента 2020 до точки 2050, из которой ток протекает в точку 2055, аналогично указанному здесь выше. Из точки 2055 ток 2075 протекает против часовой стрелки вокруг сегмента 2025 до точки 2060, из которой ток протекает в точку 2065, и затем протекает против часовой стрелки вокруг сегмента 2030 до точки 2070.
Как уже было указано здесь выше, чтобы исключить рассеяние электрического тока от описанного выше пути протекания, каждый сегмент может быть покрыт слоем электроизоляционного материала, за исключением тех поверхностей, между которыми должен протекать ток, таких как верхняя поверхность в точке 2040 и нижняя поверхность в точке 2045. Когда сегменты обмотки собирают, чтобы образовать обмотку, показанную на фиг. 20В, крепежные детали, такие как болты, пропускают через отверстия в сегментах обмотки. После сборки сегментов могут оставаться зазоры между некоторыми из указанных выше точек. Для того чтобы плотно скрепить вместе сегменты с использованием крепежных деталей, электроизоляционные прокладки могут быть введены между указанными точками для заполнения зазоров.
На фиг. 20D показан один сегмент 2015 обмотки. На фиг. 20Е показан второй сегмент 2020 обмотки, уложенный сверху на сегмент 2015. На фиг. 20Е показан третий сегмент 2025 обмотки, уложенный сверху на сегменты 2015 и 2020, а на фиг. 20G показан четвертый сегмент 2030 обмотки, уложенный сверху на сегменты 2015, 2020 и 2025, в результате чего получают полную обмотку, показанную на фиг. 20В.
На фиг. 21А показан вид сбоку двух вращательных устройств вместе с соответствующими колесами 2105а, 2105b. На фиг. 21В показан вид сверху тех же самых вращательных устройств и колес 2105а, 2105b. Два вращательных устройства в тандеме могут быть использованы в транспортных средствах. Например, транспортное средство может содержать четыре пары устройств, по одной паре в каждом углу транспортного средства. Каждое устройство содержит узел магнитного статора, противоположные обмотки и линейно-вращательный преобразователь (скрытый от взгляда наблюдателя). Устройства связаны с соответствующими колесами 2105а, 2105b и удерживаются вместе с использованием конструкции центрального держателя 145. Конструкция держателя 145 может содержать вертикальный вал 2110 или может быть связана с вертикальным валом 2110, для связи с шасси транспортного средства. Вал 2110 позволяет двум колесам 2105а, 2105b вращаться относительно шасси транспортного средства и относительно вала 2110.
На фиг. 22А-22С показаны примеры вращений колес 2105а, 2105b. На фиг. 22А показано, что вращательные устройства могут создавать тяговое усилие для транспортного средства за счет вращения обоих колес 2105а, 2105b в одном направлении. На фиг. 22В показано, что вращательные устройства могут побуждать два колеса совершать поворот относительно транспортного средства за счет вращения колес 2105а, 2105b с различными скоростями. Разность скоростей вращения колес создает тяговое усилие для транспортного средства и побуждает транспортное средство двигаться по криволинейной траектории. На фиг. 22С показано, что вращательные устройства могут побуждать два колеса совершать поворот относительно транспортного средства за счет вращения колес 2105а, 2105b в противоположных направлениях, когда транспортное средство не находится в движении.
На фиг. 23А и 23В показан пример вертикального движения колес 2105а, 2105b. На фиг. 23А показано, что одно из устройств может побуждать соответствующее колесо 2105b двигаться в вертикальном направлении от земли. Колесо 2105b также может быстро встряхиваться в вертикальном направлении, чтобы удалить жидкость с поверхности колеса 1205b. Кроме того, оба колеса 2105а, 2105b могут двигаться вместе вверх или вниз, что понижать или повышать высоту движения транспортного средства. Два колеса 2105а, 2105b могут быть даже резко опущены вниз с достаточной силой, чтобы транспортное средство подпрыгнуло. На фиг. 23В показано, что вал 2110 может быть связан с шасси транспортного средства так, чтобы позволить угловое движение вала 2110 относительно шасси, например, с использованием шарнира 2305 или другого аналогичного компонента для соединения вала 2110 с шасси. В этой конфигурации, различные вертикальные движения двух колес 2105а, 2105b побуждают колеса 2105а, 2105b наклоняться. Например, одно колесо 2105а может двигаться вниз, а другое колесо 2105b может двигаться вверх, что побуждает колеса 2105а, 2105b наклоняться, также как держатель 145 и вал 2110. Кроме того, шарнир или другой аналогичный компонент может быть использован для соединения вала 2110 с держателем 145, что побуждает наклоняться колеса 2105а, 2105b и держатель 145, но не вал 2110.
На фиг. 24A-24F показан вид сверху транспортного средства 2405, имеющего четыре пары вращательных устройств с соответствующими парами 2410a-d колес. На фиг. 24А показано транспортное средство 2405 с четырьмя парами вращательных устройств и соответствующих пар 2410a-d колес, по одной паре в каждом углу транспортного средства 2405. Транспортное средство также может иметь другую схему расположения вращательных устройств и соответствующих колес, например, с двумя парами вращательных устройств и соответствующих колес в передних углах транспортного средства. В такой схеме расположения, колеса в задних углах транспортного средства могут быть обычными колесами транспортного средства. Как это показано на фиг. 24А, все пары 2410a-d колес могут быть ориентированы в одном направлении, чтобы создавать движение вперед транспортного средства. На фиг. 24В показано, чтобы две передние пары 2410а, 2410b колес могут быть повернуты вправо, например, чтобы побуждать движущееся транспортное средство 2405 поворачиваться направо. На фиг. 24С показано, что задние пары 2410 с, 2410d колес могут быть дополнительно повернуты, например, влево, чтобы уменьшить радиус поворота транспортного средства 2405. На фиг. 24D показано, что каждая пара 2410a-d колес может быть ориентирована в тангенциальном направлении относительно круговой траектории, чтобы побуждать транспортное средство 2405 вращаться относительно его центра. На фиг. 24Е показано, что каждая пара 2410a-d колес может быть ориентирована в одном и том же направлении, другом чем направление вперед, чтобы побуждать транспортное средство 2405 двигаться, например, по диагонали или в сторону. На фиг. 24F показано, что каждая пара 2410a-d колес может быть нацелена к центру транспортного средства или от него, чтобы предотвращать любое движение транспортного средства, что позволяет исключить необходимость использования стояночного тормоза. Независимые движения каждого колеса можно регулировать при помощи соответствующего электрического блока 410 (фиг. 4В) и все движения могут быть скоординированы при помощи центрального контроллера 430 (фиг. 4В), имеющего связь с электрическими блоками.
Несмотря на то, что были описаны примерные варианты осуществления изобретения, совершенно ясно, что в него специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят однако за рамки приведенной далее формулы изобретения. Например, в дополнение к использованию в моторе автомобиля, раскрытые здесь устройства также могут быть использованы в поездах, самолетах, роботах и передающих усилие интерфейсах человек-машина.
Реферат
Группа изобретений относится к двигателям с возвратно-поступательным движением якоря или системы катушек. Вращательное устройство содержит линейно-вращательный преобразователь, узел магнитного статора и два электромагнитных исполнительных механизма, каждый из которых содержит обмотку, совершающую возвратно-поступательное движение. Привод вращения содержит узел магнитного статора, исполнительный механизм, содержащий обмотку, выполненную с возможностью совершать возвратно-поступательное движение внутри магнитных полей. Линейно-вращательный преобразователь сопряжен с исполнительным механизмом и ободом колеса. Привод вращения содержит вращающий элемент, первый и второй линейные исполнительные механизмы, включающие фиксированные элементы и подвижные элементы, которые перемещаются в линейном направлении. Опорная конструкция, на которую установлены первый и второй фиксированные элементы исполнительных механизмов. Узел преобразования сопряжен с вращающимся элементом и с подвижными элементами исполнительных механизмов. Технический результат заключается в снижении неподрессоренной массы транспортного средства. 3 н. и 59 з.п. ф-лы, 70 ил.
Формула
линейно-вращательный преобразователь, имеющий ось вращения;
узел магнитного статора, включающий ядро, имеющее один или более магнитов, создающих магнитные поля; и
два электромагнитных исполнительных механизма, каждый из которых содержит совершающую возвратно-поступательное движение обмотку, описывающую ядро и по меньшей мере часть из одного или больше магнитов ядра и расположенную с возможностью совершать возвратно-поступательное движение относительно узла магнитного статора, причем указанные совершающие возвратно-поступательное движение обмотки расположены напротив друг друга относительно оси вращения и каждая совершающая возвратно-поступательное движение обмотка связана с линейно-вращательным преобразователем, чтобы приводить его в движение.
опорную конструкцию, присоединенную к узлу магнитного статора, для присоединения вращательного устройства к транспортному средству; и
множество валов, расположенных параллельно длинной оси узла магнитного статора, причем обмотки расположены так, что они совершают возвратно-поступательное движение вдоль узла магнитного статора за счет скольжения вдоль валов.
второй кулачок, в дополнение к первому кулачку, причем первый кулачок расположен на одной стороне диска, а второй кулачок расположен на противоположной стороне диска;
второй узел магнитного статора, расположенный на противоположной стороне диска;
и
дополнительные электромагнитные исполнительные механизмы, которые содержат соответствующие дополнительные обмотки, причем указанные дополнительные обмотки связаны со вторым кулачком с использованием дополнительных следящих элементов и совершают возвратно-поступательное движение относительно второго узла магнитного статора, при этом возвратно-поступательное движение дополнительных обмоток способствует вращательному движению диска.
узел магнитного статора, включающий участок ядра магнитного статора, который имеет ось, ориентированную радиально относительно оси вращения, и содержит один или более магнитов, создающих магнитные поля;
исполнительный механизм, содержащий обмотку, описывающую участок ядра магнитного статора и по меньшей мере часть из одного или больше магнитов участка ядра магнитного статора и расположенную с возможностью совершать возвратно-поступательное движение внутри магнитных полей, созданных участком ядра магнитного статора;
обод колеса для крепления шины;
линейно-вращательный преобразователь, сопряженный с исполнительным механизмом и ободом колеса, который в процессе работы преобразует линейное возвратно-поступательное движение исполнительного механизма вдоль оси участка ядра магнитного статора во вращательное движение обода колеса вокруг оси вращения.
и который дополнительно содержит второй исполнительный механизм, содержащий вторую обмотку, описывающую второй участок ядра магнитного статора и по меньшей мере часть из одного или больше магнитов второго участка ядра магнитного статора и расположенную с возможностью совершать возвратно-поступательное движение внутри магнитных полей, созданных вторым участком ядра магнитного статора, и соединенный с линейно-вращательным механизмом;
при этом линейно-вращательный преобразователь в процессе работы преобразует линейное возвратно-поступательное движение второго исполнительного механизма вдоль оси второго участка ядра магнитного статора во вращательное движение обода колеса вокруг оси вращения.
опорную конструкцию, на которой установлен узел магнитного статора,
при этом линейно-вращательный преобразователь включает:
первый и второй механизмы передачи, соединенные соответственно с первой и второй обмотками;
вращающийся элемент, которые определяет ось вращения и на котором устанавливается обод колеса; и
подшипниковый узел, поддерживающий вращающийся элемент и создающий возможность перемещения вращающегося элемента и оси вращения относительно опорной конструкции и узла магнитного статора в направлении, ортогональном оси вращения.
вращающийся элемент, который определяет ось вращения;
первый линейный исполнительный механизм, включающий первый фиксированный элемент, имеющий первую линейную ось, ориентированную радиально относительно оси вращения, и первый подвижный элемент, который перемещается в линейном направлении вдоль первой линейной оси и относительно первого фиксированного элемента, когда на первый линейный исполнительный механизм поступает управляющий сигнал;
второй линейный исполнительный механизм, включающий второй фиксированный элемент, имеющий вторую линейную ось, ориентированную радиально относительно оси вращения, и второй подвижный элемент, который перемещается в линейном направлении вдоль второй линейной оси и относительно второго фиксированного элемента, когда на второй линейный исполнительный механизм поступает управляющий сигнал;
опорную конструкцию, на которую установлены первый и второй фиксированный элементы первого и второго исполнительных механизмов;
узел преобразования, с которым сопряжены вращающийся элемент и первый и второй подвижные элементы первого и второго исполнительных механизмов, который выполнен с возможностью:
(а) преобразовывать первый вид линейного движения подвижных элементов обоих из первого и второго линейных исполнительных механизмов во вращательное движение вращающегося элемента вокруг оси вращения, при этом ось вращения находится в фиксированном положении относительно опорной конструкции; и
(b) реагировать на второй тип линейного движения подвижных элементов обоих из первого и второго линейных исполнительных механизмов созданием относительного движения между осью вращения и опорной конструкцией в направлении, ортогональном оси вращения, без создания вращательного движения вращающегося элемента.
фиксированный элемент второго линейного исполнительного механизма включает второй магнитный статор, содержащий один или более магнитов, создающих магнитные поля, а подвижный элемент второго линейного исполнительного механизма включает вторую обмотку, описывающую второй магнитный статор и выполненную с возможностью возвратно-поступательного движения в магнитных полях, созданных вторым магнитным статором.
(а) линейно-вращательный преобразователь, сопряженный с вращающимся элементом и подвижными элементами первого и второго линейных исполнительных механизмов и преобразующий во время работы первый тип движения подвижных элементов первого и второго линейных исполнительных механизмов во вращательное движение вращательного элемента вокруг оси вращения; и
(b) подшипниковый узел, поддерживающий вращающийся элемент и создающий возможность перемещения вращающегося элемента в ответ на второй тип движения подвижных элементов первого и второго линейных исполнительных механизмов относительно опорной конструкции в направлении, ортогональном оси вращения.
Комментарии