Опорно-приводное устройство - RU2193703C2
Код документа: RU2193703C2
Чертежи









Описание
Изобретение относится к опорно-приводным устройствам, включающим в себя электродвигатель и газодинамическую опору (ГДО). Предпочтительная область применения - узлы накопления информации (жесткие диски, магнитооптические накопители, устройства для считывания компакт-дисков и т.д.), однако устройство может быть использовано для вращения полигонального зеркала лазерного принтера, сканера видеокамеры и т.д.
Известны опорно-приводные устройства с электродвигателями, в частности торцевыми, и опорами, состоящими из радиальных подшипников качения и упорных подпятников (ЕР 0561463 Н 02 К 1/27, 22.09.93; US 4839551 Н 02 К 5/16, 13.06.89).
Однако известные устройства указанной конструкции из-за несовершенных технических характеристик получили распространение лишь в низкоскоростных конструкциях.
В шпиндель-моторах накопителей на жестких магнитных дисках необходимость повышения скорости вращения ротора при одновременном обеспечении требований к увеличению ресурса безотказной работы и снижению собственной вибрации заставляет рассматривать в качестве альтернативы шарикоподшипникам более приемлемые подшипники скольжения с газовой и жидкой смазкой, которые в определенных условиях позволяют добиться существенного снижения уровня собственной вибрации и нестабильной составляющей биения поверхностей шпиндель-мотора, а также повышение срока службы.
Известно опорно-приводное устройство, в котором имеется торцевой электродвигатель с ротором и статором, на поверхностях которых, обращенных друг к другу, выполнены канавки, создающие динамическое давление жидкости при перемещении поверхностей (ЕР 0229911, Н 02 К 5/16, 29.07.87).
Недостаток известного устройства связан со значительными тепловыми потерями в используемой опоре, что отрицательно сказывается на общем КПД.
Наиболее близким к предложенному является опорно-приводное устройство (шпиндель-мотор) для накопителя информации по патенту US 5543984 G 11 В 17/035, 06.08.96, в котором для повышения точности поддержания параметров вращения ротора в газодинамической опоре используется подшипник овального скольжения с жидкой смазкой, имеющий одну плоскую торцевую рабочую поверхность со спиральными канавками, обеспечивающими несущую способность и жесткость в одном осевом направлении, и примыкающую к плоской одну цилиндрическую рабочую поверхность, обеспечивающую радиальную несущую способность. Для создания осевой жесткости в противоположном направлении предусмотрена специальная опорная плата со скосами. Рабочая поверхность платы располагается вблизи поверхности информационного диска накопителя, что предопределяет осевую жесткость и несущую способность при вращении указанного диска за счет затягивания воздуха в зазор, образуемый диском и опорной платой. Для снижения габаритов электродвигатель в этом устройстве имеет осевой рабочий зазор, что позволяет более компактно разместить ротор и статор, чем в случае с радиальным магнитным потоком в рабочем зазоре электродвигателя.
Недостатком указанного опорно-приводного устройства и, в частности, его опорной системы
являются:
- неизбежные перекосы в рабочем режиме и как следствие повышенная вибрация и нестабильные биения базовых поверхностей, возникающие из-за несимметрии жидкостного подшипника;
- нестабильность
жесткостных характеристик и возникновение перекосов при колебаниях окружающей температуры из-за различий тепловых расширений жидкости и газа (воздуха), используемых в качестве
смазки, и как следствие
изменение рабочих зазоров в воздушной и жидкостной опоре;
- повышенная вибрация в осевом направлении из-за магнитного силового взаимодействия магнитной системы ротора
с железом статора;
- вытекание смазки из жидкостного подшипника, что приводит к загрязнению рабочих поверхностей информационных дисков, выводящему их из строя, а также к сокращению ресурса
безотказной работы
привода дисков;
- отсутствие возможности обеспечения реверсивного вращения.
Технический результат изобретения заключается в создании опорно-приводного устройства, преимущественно для высокоскоростного накопителя большой емкости, с вентильным приводом и практически неограниченным ресурсом, исключающего загрязнение подшипников посторонними частицами и, кроме того, загрязнение информационных дисков жидкой смазкой и возникновение вибрации от перекосов, работоспособного при различных положениях оси вращения и при изменениях рабочей температуры в широком диапазоне, с минимальным моментом сухого трения при запусках и остановках, работоспособного при изменении направления вращения на 180o.
Технический результат достигается тем, что опорно-приводное устройство, содержащее электродвигатель со статором и ротором, газодинамическую опору с подшипниками скольжения, подвижные элементы которых образованы соответствующими участками внутренней поверхности ротора, а сопряженные с ними неподвижные элементы установлены на оси, закрепленной на основании, при этом устройство выполнено с расположенными на опоре поверхностными канавками, предназначенными для обеспечения расклинивания газом подвижных и неподвижных элементов подшипников, при этом каждая из рабочих поверхностей подвижных и неподвижных элементов подшипников является частью поверхности сферы, а каждый из двух подшипников имеет свой радиус кривизны рабочей поверхности.
Достижению технического результата способствуют также частные варианты выполнения узлов устройства.
Канавки для обеспечения циркуляции газа выполнены также на поверхностях, противоположных рабочим поверхностям элементов подшипников.
Радиусы кривизны, углы отверстия и охвата каждого из подшипников, определяющие границы его рабочих поверхностей относительно оси вращения, а также углы наклона канавок к плоскости вращения ротора могут быть выбраны с учетом величины и направления нагрузки, действующей на подшипники при рабочей скорости, а также направления вектора скорости вращения.
Для обеспечения реверсивности вращения на одной или обеих рабочих поверхностях каждого из подшипников скольжения дополнительно могут быть нанесены канавки, направляющие газовую смазку под углом к плоскости вращения ротора, отличающимся от угла наклона основных канавок.
Кроме того, ротор электродвигателя может быть выполнен из двух немагнитных, установленных один внутри другого цилиндров с фланцами на торцах, внутри которых расположены чередующиеся полюса постоянных магнитов с осевой намагниченностью, охваченные с внешних сторон кольцами из магнитомягкого материала, а статор размещен в полости между фланцами цилиндров ротора и выполнен в виде несущей якорные обмотки платы из немагнитного материала.
Постоянные магниты ротора могут быть выполнены дискретными или в виде сплошных колец с многополюсной намагниченностью.
На фиг.1 представлено схематическое изображение в продольном осевом разрезе предложенного опорно-приводного устройства (шпиндель-мотора); на фиг.2 - частичный вид разреза, приведенного на фиг.1, изображающий размещение датчика положения ротора; на фиг.3 - вид в плане того же места, которое показано на фиг.2; на фиг.4 - вид, иллюстрирующий конфигурацию рабочей поверхности подшипника, несущей преимущественно осевую нагрузку; на фиг.5 - вид, иллюстрирующий конфигурацию рабочей поверхности подшипника, несущей преимущественно радиальную нагрузку; на фиг.6 - развертка рабочей поверхности подшипника с канавками, показанного на фиг.4, иллюстрирующая расположение и форму канавок, обеспечивающих необходимую жесткость и несущую способность этого подшипника; на фиг.7 - развертка рабочей поверхности подшипника с канавками, показанного на фиг.5, иллюстрирующая расположение и форму канавок, обеспечивающих необходимую жесткость и несущую способность этого подшипника; на фиг. 8 (а-е) - расчетные зависимости несущей способности ГДО от ее геометрических параметров; на фиг.9 - упрощенная функциональная схема электропривода в целом.
Существо изобретения заключается в конструктивном и функциональном объединении элементов ГДО с криволинейными рабочими поверхностями, геометрические параметры и физические свойства которых оптимизированы для обеспечения требуемой жесткости и несущей способности в рабочем режиме, запускаемости на рабочую скорость вращения и реверсирования скорости вращения, и электродвигателя вентильного электропривода. Статор электродвигателя выполнен из немагнитных материалов для исключения магнитного силового взаимодействия между ротором и статором, что повышает эффективность и надежность работы ГДО с вогнутой или выпуклой рабочей поверхностями. Изобретение позволяет уменьшить количество сопряжений деталей, протяженность размерных цепей, уровень энерговыделения, улучшить теплоотвод от выделяющих тепло обмотки и ГДО, увеличить стабильность размеров, снизить уровень и нестабильность осевых и радиальных биений базовых поверхностей шпиндель-мотора при сохранении габаритных размеров, а также заменить жидкую смазку в подшипниках на воздушную.
Предложенное опорно-приводное устройство (шпиндель-мотор) содержит торцевой электродвигатель с ротором 1 (фиг.1) из немагнитного материала (например, алюминиевого сплава), состоящим из сопряженных коаксиальных полого цилиндра 2 и втулки 3 с фланцами 4 и 5 на торцах. Втулка 3 жестко соединена с цилиндром 2, например, с помощью клея. Между фланцами 4 и 5 образован зазор 6. Статор 7 электродвигателя выполнен в виде печатной платы, вставлен в указанный зазор 6 и закреплен на основании 8 устройства. В печатной плате 7 в пределах площади А фланцев 4 и 5 размещена обмотка 9 якоря электродвигателя. На фланцах 4 и 5 установлены две пары (2 р) постоянных магнитов 10 чередующейся полюсности и кольца 11 и 12 из магнитомягкого материала, замыкающие магнитный поток со стороны, противоположной зазору 6, а также являющиеся магнитным экраном. Якорная обмотка 9 представляет собой катушки, размещенные по окружности вокруг оси вращения на определенном расстоянии друг от друга. Для улучшения теплоотвода обмотка 9 якоря залита компаундом, наполненным алюминиевой пудрой.
За пределами поверхности А на печатной плате статора 7 установлены электронная схема и датчик 13 положения ротора. В качестве датчика 13 использованы магниточувствительные микросхемы 14 и 15 (фиг.2, 3). Поскольку эти микросхемы имеют размеры, не позволяющие разместить их в рабочем зазоре 6 электродвигателя, они расположены на плате 7 вне рабочего зазора, но между двумя тонкими пластинами 16 и 17, выполненными из магнитомягкого материала. Концы этих пластин вставлены в зазоры между платой 7 статора и фланцами 4 и 5. Благодаря этому часть магнитного потока основных полюсов ротора 1 (магниты 10) попадает в магнитопровод датчика 13 и пронизывает магниточувствительную микросхему.
Статор 7 крепится на основании 8 с помощью винтов (не показано). Основание 8 имеет центральное отверстие, в котором жестко крепится нижний конец оси 18. На хвостовой части оси 18 жестко закреплен шип 19 с криволинейной (например, часть выпуклой поверхности сферы) рабочей поверхностью (фиг.4), воспринимающей в данном случае преимущественно осевую нагрузку. Фиксация положения шипа 19 на оси 18 осуществляется, например, с помощью клея. Конец оси 18, расположенный со стороны, противоположной основанию 8, имеет жестко закрепленный на нем шип 20, воспринимающий в данном случае преимущественно радиальную нагрузку (фиг.5). Положение шипа 20 на оси 18 фиксируется, например, с помощью клея. Находящаяся между шипами 19 и 20 втулка 3 имеет цилиндрическое отверстие, в которое свободно входит центральная часть оси 18.
Криволинейные рабочие поверхности и шипов 19 и 20 сопряжены через зазоры с
соответствующими поверхностями втулки 3. Эти зазоры находятся в диапазоне от 1,0 до 2,0 мкм в направлении радиуса
криволинейной поверхности. Криволинейные поверхности, по крайней мере, по одной в
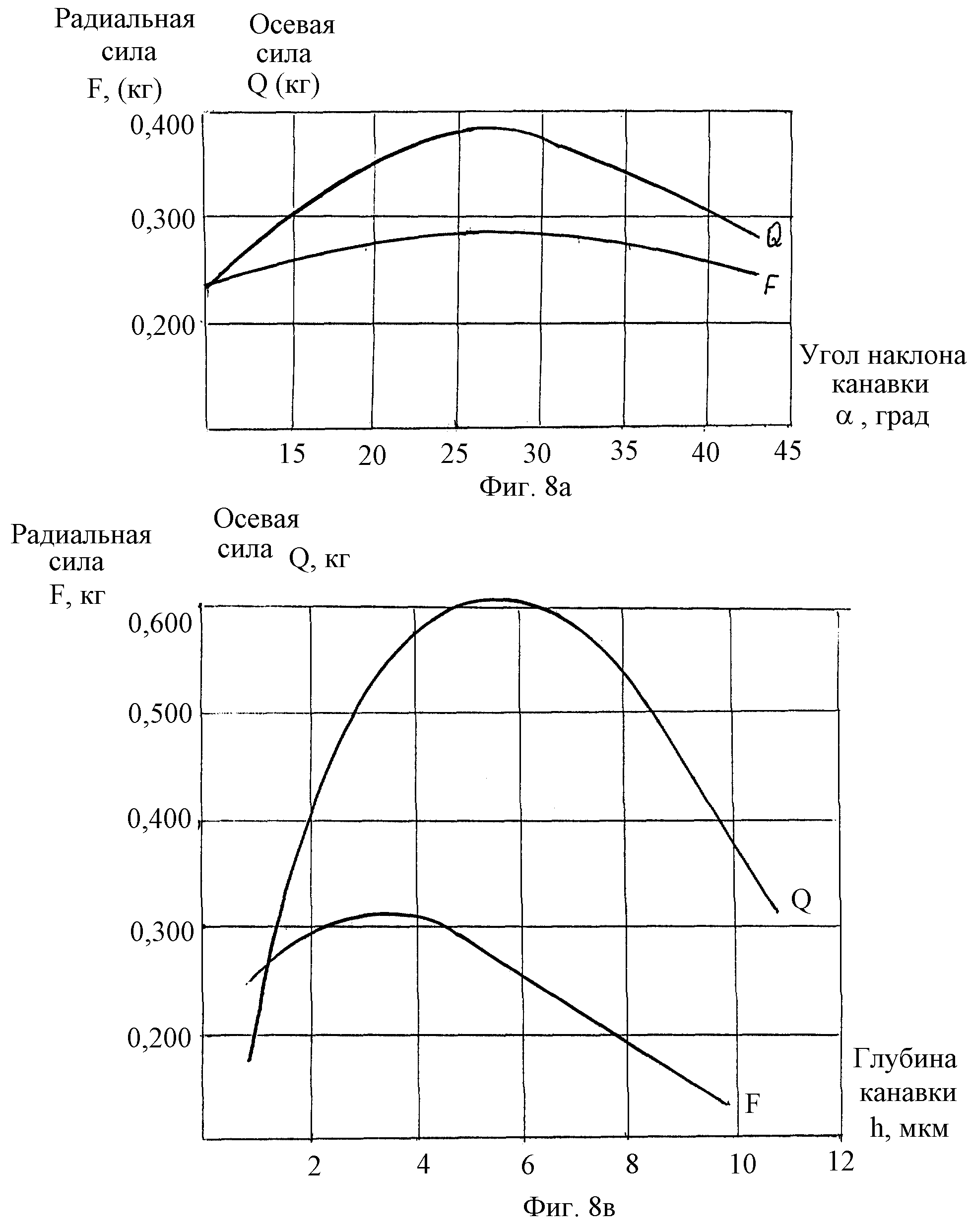
каждом подшипнике имеют канавки глубиной от 2,0 до 5,0 мкм (фиг.6), по крайней мере, на одной из рабочих поверхностей
каждого подшипника. Параметры канавок, в частности глубина h и угол наклона
канавок α0 (фиг.6), определяют несущую способность опоры, как это показано на фиг.8 (а, б). Здесь в
качестве примера приведена зависимость осевой и радиальной несущей способности
полусферической ГДО радиусом R= 6 мм при скорости вращения ротора П=4500 об/мин от глубины h и угла наклона канавок
α0 к плоскости вращения. В случае необходимости обеспечения
возможности реверсирования на одной или обоих рабочих поверхностях каждого подшипника ГДО дополнительно наносят канавки
под углом к плоскости вращения, например, 180°±α0.
Размеры и конфигурация рабочих поверхностей подшипников ГДО (наружные поверхности шипов 19 и 20,
а также внутренние поверхности втулки 3) при заданной скорости вращения
выбираются исходя из заданных габаритных размеров, максимальной величины и направления нагрузки, при которой шпиндель-мотор
должен выполнять свои функции, а также исходя из требуемой жесткости опорной
системы. В качестве примера на фиг.8 показаны зависимости предельной нагрузки в радиальном и осевом направлении от радиуса
кривизны R полусферической рабочей поверхности ГДО (с), угла охвата θ1 (d) и угла θ2 (е); эти углы ограничивают криволинейные рабочие поверхности и определяют
угловую координату ϕ реакции опоры F относительно оси вращения. В общем
случае каждый из двух подшипников имеет свой радиус кривизны рабочих поверхностей шипа и втулки R, свои углы отверстия
ϕ и охвата θ1 и θ2, ограничивающие
рабочие поверхности. Наряду с оптимизацией геометрических параметров рабочих поверхностей R, ϕ, θ1 и θ2, обеспечивающих требуемую несущую способность и
жесткость ГДО, это позволит расположить электродвигатель, статор 7 которого выполнен без использования магнитных
материалов, со стороны подшипника, обеспечивающего меньший диаметр втулки 3, и тем
самым более рационально использовать объемы, выделенные для размещения электрической машины и ГДО
шпиндель-мотора.
Функционально электропривод шпинделя (фиг. 8) содержит стабилизатор (регулятор) напряжения (не показан), коммутатор 21, декодер 22, реагирующий на сигналы датчика 13 положения ротора, и собственно электрическую машину.
Работает предложенное опорно-приводное устройство следующим образом.
При включении электропитания произвольное положение ротора 1 фиксируется датчиком 13, в соответствии с выходными сигналами которого посредством декодера 22 и силовых ключей коммутатора 21 (фиг.9) включается одна из двух фаз обмотки якоря 9. При этом в результате взаимодействия магнитодвижущей силы этой обмотки с постоянными магнитами 10 ротора 1 возникает вращающий момент, под действием которого ротор 1 поворачивается в заданном положением магнитодвижущей силы обмотки 9 направлении. При повороте ротора 1 сигнал датчика 13 изменяется, происходит коммутация обмотки якоря 9, ротор 1 поворачивается в том же направлении. Автокоммутация повторяется до тех пор, пока электродвигатель подключен к электропитанию. Установившийся режим вращения наступает при равенстве развиваемого электродвигателем момента и аэродинамического момента трения вращающихся частей (в том числе и подшипников). Пока аэродинамический момент трения не меняется, неизменным остается и напряжение на входе коммутатора 21, т.е. регулятор напряжения работает в режиме стабилизатора.
Каждый запуск на рабочую скорость ГДО сопровождается прохождением двух режимов работы:сухого трения в начальный период разгона до всплытия и конечный период выбега с момента посадки до остановки; работы с газовой смазкой с момента всплытия после запуска, в установившемся режиме и при выбеге до момента посадки. Первый режим наступает после преодоления вращающим моментом электродвигателя момента трогания в ГДО и характеризуется повышенным моментом сопротивления, так как здесь имеет место непосредственный контакт вращающейся и неподвижной поверхностей (сухое трение). С началом движения ротора 1 газом (в нашем случае воздух) захватывают канавки, нанесенные на рабочие поверхности ГДО, и гонят к полюсу, создавая при этом в зоне уплотнения давление, расклинивающее подвижные и неподвижные элементы подшипников. В результате ГДО всплывает и переходит во второй режим работы, при котором ее вращающиеся и неподвижные элементы разделены воздушным клином и непосредственный контакт между этими поверхностями отсутствует. При этом расклинивающая планка, создающая осевую несущую способность, возникает только в результате работы канавок и наличия уплотняющей зоны. Образование клина, создающего радиальную несущую способность, происходит благодаря затягиванию воздуха в суживающийся радиальный зазор при движении одной поверхности относительно другой с эксцентриситетом (максимальный эксцентриситет имеет место при отсутствии всплытия).
Из рабочей зоны воздух перемещается к полюсу, а затем через специальные отверстия в валике ГДО поступает к поверхностям подшипников, противоположным рабочим. Здесь воздух в свою очередь захватывается специальными канавками и подается к периферийной части рабочей поверхности ГДО.
Далее воздух с помощью канавок поступает в рабочую зону. Таким образом, в подшипниках обеспечивается циркуляция воздуха в замкнутом объеме, что практически исключает вероятность загрязнения подшипников из-за попадания посторонних частиц в рабочую зону подшипников из внешней среды и тем самым повышает надежность работы ГДО.
Высокая стабильность мгновенной частоты вращения и потребляемого тока, обеспечиваемая стабильностью момента сопротивления ГДО в газодинамическом режиме, обуславливает постоянство выделяемой в виде тепла мощности и высокую стабильность теплового режима шпиндель-мотора. Благодаря тому, что в данной конструкции разнесены источники тепловыделения и пути отвода от них тепла, а также хорошему теплоотводу от выделяющих тепло обмотки якоря и ГДО, а также благодаря повышенному КПД двигателя температура шпинделя не только постоянна, но и невысокая. Это означает, что в рабочем режиме практически отсутствуют температурные изменения, линейные изменения линейных размеров деталей шпинделя и температурные деформации информационных дисков, которые могли бы привести к изменению осевых и радиальных биений информационных дисков в процессе работы и изменению жесткостных характеристик ГДО.
Снижение нестабильной составляющей биений достигается реализацией основных преимуществ ГДО - практически неограниченного ресурса работы, высокой стабильности положения оси вращения и низкого уровня собственной вибрации. Это обеспечивается благодаря отсутствию непосредственного контакта между вращающимися и неподвижными элементами ГДО и сжимаемости газового смазочного слоя (воздуха). Оптимизация параметров ГДО, учитывающая характер ее нагрузки, размеры и конфигурацию электродвигателя, возможность совмещения деталей шпиндель-мотора и ГДО и включающая мероприятия по сокращению воздухообмена с окружающей ГДО средой, высокая точность изготовления рабочих поверхностей в сочетании с сжимаемостью воздуха в газодинамическом режиме позволяют получить высокую жесткость ГДО, колебания зазора в ГДО при рабочей скорости вращения ротора, не превышающие 1-2 микродюйма, и, следовательно, нестабильную составляющую колебаний базовых поверхностей ротора 1, не превышающие 1-2 микродюйма. Благодаря совмещению деталей шпинделя, электродвигателя и ГДО общий объем шпиндель-мотора оказывается минимальным.
Выше описана одна из возможных конструкций предложенного опорно-приводного устройства. Следует отметить, что вместо дискретно установленных на роторе 1 отдельных магнитов 10 может быть использовано сплошное кольцо с многополюсной намагниченностью. Сопряжение цилиндра 2 и втулки 3 может быть осуществлено по иной поверхности. В качестве смазки может быть применен не только воздух, но и другой газ. Рабочая поверхность одного из подшипников ГДО может иметь радиус кривизны, равный бесконечности, т.е. быть плоской. Направление движения смазки может быть ориентировано как к полюсу, так и к экватору рабочих поверхностей подшипников, при этом в одной ГДО направление газа для одного и другого подшипников может быть различным. Канавки в рабочей зоне подшипника могут быть как на одной, так и на обеих рабочих поверхностях.
Для обеспечения реверсивности вращения, по крайней мере, на одной рабочей поверхности каждого подшипника углы наклона канавок к плоскости экватора (плоскости вращения) могут отличаться, например, на 180o. Важно только, чтобы оба подшипника имели канавки с противоположных сторон и чтобы геометрические параметры - радиус кривизны, углы охвата и отверстия каждой рабочей поверхности, а также величины и направления углов канавок в рабочей зоне подшипника соответствовали величине и направлению вращения и условиям реверсирования. К тому же на рабочей и противоположной ей поверхностях каждого или хотя бы одного из двух подшипников следует предусмотреть канавки, направляющие смазку по требуемой траектории, обеспечивающей требуемую несущую способность и жесткость ГДО в рабочем режиме, а также сводящей к минимуму миграцию смазки из полости подшипника.
Электродвигатель в каждом случае предпочтительно выполнять торцевым с якорем без магнитопровода, а элементы шпинделя, ГДО и электродвигателя целесообразно совмещать с целью преодоления аддитивности объема.
Реферат
Изобретение относится к опорно-приводным устройствам для узлов накопления информации, преимущественно жестких дисков компьютеров. Опорно-приводное устройство содержит электродвигатель со статором и ротором, газодинамическую опору с подшипниками скольжения, подвижные элементы которых образованы соответствующими участками внутренней поверхности ротора, а сопряженные с ними неподвижные элементы установлены на оси, закрепленной на основании. Устройство выполнено с расположенными на опоре поверхностными канавками, предназначенными для расклинивания газом подвижных и неподвижных элементов подшипников, при этом каждая из рабочих поверхностей подвижных и неподвижных элементов подшипников является частью поверхности сферы. Каждый из двух подшипников имеет свой радиус кривизны рабочей поверхности. Электродвигатель является торцевым, при этом ротор выполнен из двух немагнитных, установленных один внутри другого цилиндров с фланцами на торцах, а статор размещен между фланцами цилиндров и выполнен в виде несущей якорной обмотки платы из немагнитного материала. Технический результат - исключение загрязнения информационных дисков жидкой смазкой, исключение вибраций и перекосов. 4 з.п. ф-лы, 9 ил.

Комментарии