Исполнительный привод с устройством управления и соответствующий способ управления - RU2777916C2
Код документа: RU2777916C2
Чертежи



Описание
Изобретение относится к области техники автоматического управления, в частности к исполнительному приводу, имеющему устройство управления для управления исполнительным приводом, а также к соответствующему способу управления таким исполнительным приводом.
Исполнительные приводы имеют множество применений, в частности в установках для подачи нефти и газа. Такие установки работают кое-где в экстремальных климатических условиях, например, в пустынях или в областях с вечномерзлыми грунтами. Соответственно могут быть и суровые условия окружающей среды.
Безопасное и надежное управление исполнительными приводами в таких условиях представляет собой сложную задачу, так как, в частности, персонал, обслуживающий исполнительные приводы, зачастую работает в перчатках, и при эксплуатации установок появляется дополнительная загрязненность, например, масляная.
Наряду с этим постоянно возрастает функциональная возможность, которая обеспечивается исполнительными приводами. Поэтому в отношении исполнительных приводов, известных из уровня техники, можно наблюдать, что количество переключателей управления постоянно увеличивается. И все же хочется сделать исполнительные приводы наиболее компактными. Поэтому и возникают споры, так как переключатели определенного размера, необходимые для простого и удобного обслуживания, нельзя разместить в любом количестве в ограниченном пространстве.
К тому же из-за воздействия загрязнений, коррозии или обледенения это может привести к заеданию переключателей и тем самым к полному отказу функции управления, обеспечиваемой соответствующим переключателем. Это, в частности, угрожает эксплуатационной безопасности.
Поэтому задачей предложенного изобретения является улучшение удобства управления исполнительными приводами и повышение их надежности и безопасности. В частности, нужно реализовать высокий уровень сложных функций управления с помощью наименьшего числа элементов управления. Таким образом, нужно компактно сформировать исполнительный привод с широким объемом функций.
Эта задача решается с помощью заявленного исполнительного привода, имеющего устройство управления для управления исполнительным приводом, за счет того, что устройство управления имеет внутренний поворотный элемент и внешний поворотный элемент, причем оба поворотных элемента расположены концентрично друг относительно друга и выполнены с возможностью вращения вокруг одной общей оси независимо друг от друга.
При наличии двух концентрично расположенных поворотных элементов вводится новая посылка для управления исполнительными приводами. При этом поворотные элементы можно тактильно осязать, что улучшает управление в перчатках. В частности, устройство управления можно выполнить свободным от тумблеров.
Кроме того, выгодно, что путем вращения, перемещения, а также качания поворотных элементов можно реализовать многие и сложные функции управления иным образом, нежели при наличии перекидных выключателей, с помощью которых можно управлять только в двух переключаемых положениях. Это, в частности, выгодно тогда, когда исполнительный привод имеет дисплей, на котором оператор может отслеживать функции управления, предпринятые устройством управления. С помощью обоих поворотных переключателей можно, например, очень просто и быстро ориентироваться в графической интерактивной экранной среде дисплея.
При этом концентрическое расположение обоих поворотных элементов обеспечивает то, что они имеют в данном пространстве максимально возможное расположение для простого и безопасного управления, в частности, в перчатках. Наличие одной общей оси вращения выгодно тем, что возможен, например, поворот отдельных поворотных элементов на 360° и одновременно их максимально возможная форма выполнения, не препятствующая их взаимному движению.
Согласно изобретению задача может решаться с помощью других выгодных форм выполнения, представленных в зависимых пунктах формулы.
Например, в одной предпочтительной форме выполнения предусмотрено, что внутренний поворотный элемент выступает на оси над внешним поворотным элементом. Дополнительно или альтернативно можно предусмотреть, чтобы внешний поворотный элемент выступал над внутренним поворотным элементом в радиальном направлении. Благодаря таким формам выполнения обеспечивается то, что устройство управления можно обслуживать даже грубыми пальцами перчатки или рукой, одетой в рукавицу. При этом особенно выгодно, если ко всему устройству управления есть доступ спереди и/или если, по меньшей мере, к части окружности одного, предпочтительно, обоих поворотных элементов есть доступ сбоку. Ибо благодаря этому облегчается обхватывание поворотных элементов.
Согласно следующей форме выполнения выгодно, если устройство управления установлено на исполнительном приводе с возможностью снятия с него. Так как благодаря этому устройство управления при неисправности можно заменить, не предпринимая каких-либо больших изменений на исполнительном приводе. Преимущественно это происходит с помощью приемного устройства, определяющего ось вращения обоих поворотных элементов. Такое приемное устройство можно сформировать, например, за счет углубления на корпусе исполнительного привода, в которое можно вставлять устройство управления, в частности, выступ, выполненный на устройстве управления. Для этого, например, на выступе можно предусмотреть резьбу, а на приемном устройстве - соответствующую сопряженную резьбу. Альтернативно или дополнительно приемное устройство само может образовывать выступ, который опять-таки сопрягается с соответствующим приемником устройства управления и образует с ним ось вращения.
Согласно другой предпочтительной форме выполнения изобретения внешний поворотный элемент опирается на оси на внутренний поворотный элемент преимущественно в ограниченной области углов. Альтернативно можно предусмотреть, чтобы внутренний поворотный элемент и внешний поворотный элемент удерживались по отдельности преимущественно на оси, определяющей ось вращения. Подразумевается, что при этом ось, разумеется, может состоять из нескольких частей. Благодаря такому выполнению устройство управления может быть сконструировано, например, так, что внутренний поворотный элемент при вращении внешнего поворотного элемента совершает движение вместе с ним или же что внутренний поворотный элемент при вращении внешнего поворотного элемента остается неподвижным. Ибо в обоих случаях можно гарантировать возможность вращения внутреннего поворотного элемента относительно внешнего поворотного элемента. Таким образом, с помощью внутреннего поворотного элемента, независимо от положения внешнего поворотного элемента, можно вводить управляющие сигналы.
В соответствии с другой формой выполнения изобретения предусмотрено, что, по меньшей мере, один из поворотных элементов имеет, по меньшей мере, одно углубление, предпочтительно, однако, три углубления для приема механического фиксатора. При этом углубления можно сформировать, в частности, в виде канавки. При наличии, по меньшей мере, одного такого углубления можно блокировать соответствующий поворотный элемент с помощью такого фиксатора. Тем самым можно предотвратить несанкционированное управление исполнительным приводом. Наличие нескольких таких углублений выгодно тем, что исполнительный привод можно защитить в разных состояниях, заданных путем установки поворотных элементов, зафиксированных с помощью фиксатора.
С целью расширения функций управления, реализуемых с помощью устройства управления, следующая форма выполнения изобретения предусматривает, что для одного из поворотных элементов, предпочтительно для двух поворотных элементов сформировано, по меньшей мере, одно положение равновесия. Под термином «положение равновесия» здесь можно понимать, в частности, заданное положение поворотного элемента, исходя из которого можно передавать управляющие сигналы на исполнительный привод за счет движения поворотного элемента.
Поэтому предпочтительно, если, по меньшей мере, одно положение равновесия оператор может определить путем осязания. Соответствующий поворотный элемент, для которого сформировано, по меньшей мере, одно положение равновесия, может, кроме того, отклоняться из положения равновесия в направлении движения часовой стрелки и/или против направления движения часовой стрелки, например, за счет качания. Таким образом, особенно просто можно ориентироваться внутри меню с помощью отдельных пунктов меню.
При этом особенно удачно, если соответствующий поворотный элемент может отклоняться, по меньшей мере, из одного положения равновесия навстречу первой возвращающей силе. Ибо, таким образом, оператор может чувствовать и лучше контролировать управляющее движение качания поворотного элемента. Другими словами, улучшается активное осязание посредством ощупывания объекта восприятия рукой для реализации сложных функций управления. При этом с особым предпочтением можно предусмотреть, чтобы соответствующий поворотный элемент мог быть переведен навстречу второй возвращающей силе, по меньшей мере, из одного положения равновесия в соседнее положение равновесия. Благодаря наличию второй возвращающей силы оператор может различить перестройку между соседними положениями равновесия по перемещению из положения равновесия, т.е. управляющие движения качания. При этом выгодно, если вторая возвращающая сила будет больше, чем первая возвращающая сила. Ибо в этом случае оператор для перевода из одного положения равновесия в соседнее положение равновесия должен преодолеть больший порог усилия, чем при качании поворотного элемента. Это помогает избежать непреднамеренных ошибок в управлении.
Согласно следующей удачной форме выполнения изобретения можно предусмотреть, чтобы для движений отклонения поворотного элемента из положения равновесия, т.е. управляющих движений качания, имелась область углов, составляющая, по меньшей мере, +/- 5°. Предпочтительно эта область углов составляет, однако, по меньшей мере, +/- 12.5°.
Такие области углов для движений отклонения могут быть необходимы для возможности активного осязания посредством ощупывания объекта восприятия для управления руками в перчатках. При этом устройство управления может быть выполнено, в частности, таким образом, что в области углов, предусмотренной для движений отклонений, поворотный элемент может автоматически возвращаться под воздействием возвращающих сил в положение равновесия, используемое как исходное положение. Таким образом, становится возможным, что соответствующий поворотный элемент при его освобождении всегда возвращается на определенную исходную позицию, из которой он снова может отклоняться. Таким образом, оператор, не утомляясь, может быстро выполнить большое число управляющих движений, так что повышается комфорт при управлении.
Альтернативно или дополнительно можно далее предусмотреть, чтобы соседние положения равновесия поворотного элемента были разнесены между собой, по меньшей мере, на 25°. Эта мера выгодна для достижения активного осязания посредством ощупывания объекта восприятия для управления руками в перчатках.
Согласно еще одной выгодной форме выполнения изобретения предусмотрено, что управляющий сигнал, введенный с помощью внутреннего поворотного элемента и/или внешнего поворотного элемента, передается бесконтактным способом, в частности, с помощью магнитной связи во внутреннюю, предпочтительно герметичную камеру исполнительного привода. Ибо согласно изобретению с помощью магнитов, помещенных в поворотные элементы, в частности сзади, можно безупречно передавать сложные управляющие сигналы сквозь герметичный корпус исполнительного привода, как это предписано, в частности, во взрывоопасной среде, например, в установках по подаче газа.
Для этого изобретение предлагает, в частности, установить на внутренней стороне крышки корпуса исполнительного привода плату, а на ней разместить датчики магнитного поля, предпочтительно датчики Холла, связанные с магнитами поворотного элемента, как это еще будет описано более подробно. С помощью магнитов, расположенных на внешней стороне относительно корпуса исполнительного привода, и датчиков магнитного поля, находящихся на внутренней стороне, создается магнитная связь между устройством управления и исполнительным приводом.
Бесконтактная передача управляющих сигналов, введенных с помощью поворотных элементов, выгодна тем, что здесь, в отличие от обычных переключателей, можно отказаться от отверстий в корпусе исполнительного привода. Другими словами, устройство управления можно установить на крышке корпуса, которая, несмотря на высверленные отверстия под крепежные болты, не имеет дыр.
Для решения уже указанной задачи в исполнительном приводе, имеющем устройство управления для управления исполнительным приводом, альтернативно или дополнительно предлагается снабдить устройство управления поворотным элементом, который имеет, по меньшей мере, один магнит для передачи управляющих движений или управляющих сигналов во внутреннюю камеру исполнительного привода. При этом можно установить, в частности, во внутренней камере исполнительного привода, датчики магнитного поля для считывания управляющих движений поворотного элемента.
В отношении особого расположения магнита или магнитов внутри соответствующего поворотного элемента согласно изобретению выгодно, если, по меньшей мере, один магнит, в частности, магниты, расположен / расположены радиально снаружи и/или обращен / обращены к корпусу исполнительного привода в или на поворотном элементе. При этом расположение радиально снаружи выгодно тем, что максимально увеличивается путь, проделанный магнитом во время движения вращения поворотного элемента. Это позволяет считывать это движение с высокой точностью. Расположение аксиально внутри, в частности, на задней стороне соответствующего поворотного элемента, обращенной к корпусу исполнительного привода, выгодно тем, что расстояние между соответствующим магнитом и приданным ему датчиком магнитного поля во внутренней камере исполнительного привода предельно уменьшается, в результате чего достигается высокая напряженность магнитного поля на датчике магнитного поля. Это также выгодно для возможности надежного считывания движений соответствующего поворотного элемента, в частности, с учетом колебаний температур, которые могут влиять на чувствительность датчиков магнитного поля.
Согласно следующей форме выполнения изобретения сложные функции управления при реализации решения, связанного с передачей по магнитной связи, можно осуществить особенно просто, если каждому положению равновесия поворотного элемента подчинить пару, состоящую из магнита поворотного элемента и датчика магнитного поля первого типа, расположенного в желаемом положении равновесия внутри корпуса исполнительного привода. При этом можно, в частности, предусмотреть, чтобы магнит поворотного элемента соответствовал всем положениям равновесия поворотного элемента. Другими словами, этот магнит создает, таким образом, во всех положениях равновесия, применяемых для управления исполнительным приводом, напряженность магнитного поля, определяемую датчиком магнитного поля, находящимся в положении равновесия или позиции равновесия, так что можно точно определить положения равновесия.
При этом особенно предпочтительно, если предусмотрен, по меньшей мере, один другой датчик магнитного поля второго типа и/или, по меньшей мере, один другой магнит. Ибо благодаря таким альтернативным или дополнительным формам выполнения можно регистрировать отклонение соответствующего поворотного элемента из положения равновесия и преимущественно применяемое при этом направление вращения. Это возможно, так как помимо первой напряженности поля, зарегистрированной датчиком магнитного поля первого типа, можно регистрировать, в частности, отличную от нее вторую напряженность поля с помощью датчика магнитного поля второго типа. С помощью непрерывного измерения этих двух напряженностей поля посредством датчиков магнитного поля первого и второго типа можно сделать выводы об отклонении поворотного элемента и, в частности, о применяемом при этом направлении вращения.
Согласно усовершенствованному варианту изобретения особенно выгодно, если датчики магнитного поля первого типа, предназначенные для регистрации созданных положений равновесия, разнесены между собой таким образом, что их области регистрации магнитного поля не перекрываются. Под областью регистрации магнитного поля здесь можно понимать, в частности, область, в частности, область углов, внутри которой соответствующий датчик магнитного поля еще может определять присутствие магнита, расположенного на одном из поворотных элементов. Благодаря отсутствию перекрывания можно обеспечить то, что в положении равновесия постоянно будет срабатывать только один из датчиков магнитного поля первого типа, так что можно избежать неопределенных состояний.
При этом, альтернативно или дополнительно можно предусмотреть, чтобы каждому положению равновесия поворотного элемента, т.е., в частности, внутреннего и/или внешнего поворотного элемента, были подчинены два датчика магнитного поля второго типа. При этом, каждый из этих двух датчиков магнитного поля второго типа предназначен для регистрации отклонения из соответствующего положения равновесия в каждом направлении. За счет такой формы выполнения на исполнительный привод можно передавать два разных сигнала направления, исходя из положения равновесия, в результате качания соответствующего поворотного элемента в направлении движения часовой стрелки или против направления движения часовой стрелки. Таким образом, можно, например, перемещаться внутри меню вверх или вниз или можно перемещать исполнительный привод вперед или назад.
Согласно еще одной форме выполнения изобретения устройство управления можно сформировать таким образом, чтобы на поворотном элементе находились, по меньшей мере, два магнита. При этом, один, по меньшей мере, из двух магнитов, взаимодействует с датчиками магнитного поля первого типа для регистрации положений равновесия, а второй, по меньшей мере, из двух магнитов, взаимодействует с датчиками магнитного поля второго типа для регистрации отклонений поворотного элемента из положения равновесия. И при такой форме выполнения выгодно, если датчики магнитного поля первого типа и датчики магнитного поля второго типа разнесены между собой таким образом, что их области индикации магнитного поля не перекрываются.
Для наиболее эффективного применения датчиков магнитного поля изобретение предлагает среди прочего, чтобы для N положений равновесия поворотного элемента применялись каждый раз N датчики магнитного поля первого типа для регистрации положений равновесия. Кроме того, альтернативно или дополнительно предлагается, чтобы при N положениях равновесия применялись N+1 другие датчики магнитного поля второго типа для регистрации управляющих движений поворотного элемента (3, 4). Эти N+1 датчики магнитного поля второго типа можно применять, в частности, для регистрации направления вращения поворотного элемента.
Для решения поставленной задачи в отношении исполнительного привода, имеющего устройство управления для управления исполнительным приводом, альтернативно или дополнительно предлагается применение упругого элемента для создания возвращающей силы при отклонении и/или переключении поворотного элемента. С помощью упругого элемента можно, таким образом, воздействовать на поворотный элемент при его отклонении с помощью возвращающих сил, которые дают оператору путем активного осязания знать об отклонении поворотного элемента. Таким образом, обслуживание устройства управления становится для оператора более комфортным и менее утомительным.
При этом упругий элемент взаимодействует с поворотным элементом преимущественно таким образом, что интенсивность нарастания возвращающей силы по мере отклонения поворотного элемента из положения равновесия увеличивается. При этом можно, в частности, предусмотреть, чтобы эта интенсивность нарастания возвращающей силы увеличивалась перед фиксированием поворотного элемента в новом, соседнем положении равновесия. Согласно особенно предпочтительной форме выполнения для этого на зажимной направляющей можно предусмотреть различные уклоны, с которыми взаимодействует упругий элемент для повышения интенсивности нарастания возвращающей силы.
Усовершенствованный вариант механизма с упругим элементом предусматривает выполнение стопорного механизма, который обеспечивает осязаемое фиксирование соответствующего поворотного элемента, по меньшей мере, в одном положении равновесия. Для этого можно применить, например, сам упругий элемент для фиксации в положении равновесия. Предпочтительно фиксирование более, чем в одном положении равновесия можно активно осязать, например, в двух, трех, четырех или более четырех положениях равновесия.
В соответствии с формой выполнения изобретения упругий элемент представляет собой плоскую пружину. При применении плоской пружины выгодно, что она в области обоих своих концов удерживается поворотным элементом. Это крепление можно выполнить, в частности, таким образом, что плоская пружина может поворачиваться вокруг опор, находящихся на удалении от ее концов. Кроме того, альтернативно или дополнительно можно предусмотреть, чтобы концы плоской пружины были подвижными и/или чтобы плоская пружина имела форму буквы М.
Согласно особой форме выполнения изобретения можно предусмотреть наличие дискового кулачка с рядом разных скосов. Этот дисковый кулачок может взаимодействовать с упругим элементом, преимущественно с плоской пружиной для создания разных по величине возвращающих сил. Согласно предпочтительной форме выполнения для этого плоская пружина образует выступ, преимущественно в виде фиксирующей лапки, для заскакивания его, по меньшей мере, в одно соответствующее углубления дискового кулачка, причем, разумеется, можно предусмотреть и несколько таких углублений, в зависимости от числа положений равновесия. В одном из наиболее предпочтительных вариантов дисковый кулачок образует к тому же концевой упор. С помощью этих концевых упоров можно ограничивать управляющие движения вращения поворотного элемента. Таким образом, можно, например, предотвратить перекручивание поворотного элемента.
Согласно следующей форме выполнения изобретения можно предусмотреть возможность закрепления или крепление устройства управления на корпусе исполнительного привода при помощи описанного выше дискового кулачка. Для этого дисковый кулачок может иметь с корпусом, в частности, точечное соединение, преимущественно одно единственное резьбового соединение. Альтернативно или дополнительно дисковый кулачок можно соединить с корпусом с помощью, в частности, упомянутой выше оси. Кроме того, дисковый кулачок может прилегать своей плоскостью к корпусу.
В соответствии с предпочтительной формой выполнения дисковый кулачок имеет круговой бортик. Бортик выгоден для повышения механической прочности дискового кулачка и обеспечения широких плоскостей для описанных выше концевых упоров и для вхождения упругого элемента.
Для достижения наиболее эффективной и надежной магнитной связи изобретение предлагает провести внутренний поворотный элемент, в частности, область поворотного элемента, содержащую магнит, сквозь внешний поворотный элемент и/или дисковый кулачок к корпусу исполнительного привода.
При этом предпочтительно, если проходное отверстие выполнено на дисковом кулачке и/или на внешнем поворотном элементе. Ибо в этом случае можно, например, выполнить упомянутый выше бортик круговым, что послужит прочности дискового кулачка.
Для решения задачи, связанной с уже описанным исполнительным приводом, изобретение альтернативно или дополнительно предлагает управлять исполнительным приводом с помощью магнитного штыря. Для этого штырь имеет на своем конце магнит, который, если его подвести к внешней стороне корпуса исполнительного привода, может привести в действие датчик магнитного поля внутри исполнительного привода и считать, таким образом, управляющий сигнал. При этом выгодно, что управление с помощью штыря можно, в частности, осуществить таким образом, что оно будет возможным без задействования поворотного элемента или прочих управляющих элементов. Таким образом, имеется альтернативный вариант, с помощью которого самим исполнительным приводом можно надежно управлять в экстренных случаях при отказе поворотного или управляющего элемента, например, из-за обледенения.
Разумеется, для управления с помощью штыря можно установить, в частности, в (защищенной) внутренней камере исполнительного привода датчики магнитного поля. Кроме того, согласно изобретению выгодно, если обслуживание устройства управления можно перевести с ручного управления, т.е. с помощью поворотных или прочих управляющих элементов, на управление с помощью штыря. Такое переключение между типами управления может осуществляться при помощи магнитного штыря.
Для упрощения управления с помощью магнитного штыря на внешней стороне корпуса исполнительного привода можно предусмотреть маркировку распределения датчиков магнитного поля исполнительного привода. Такую маркировку можно нанести, например, также под преимущественно съемным устройством управления, так что дополнительного места не потребуется. Маркировки или символы управления можно, например, наклеить или выполнить надпись на металлической пластине.
Поставленная выше задача решается, кроме того, с помощью заявленного способа управления исполнительным приводом, причем исполнительный привод имеет устройство управления, по меньшей мере, с одним поворотным элементом, причем решается за счет того, что все управляющие сигналы, необходимые для работы исполнительного привода, можно вводить путем управления, по меньшей мере, одним поворотным элементом, в частности, двумя поворотными элементами, и, причем, при применении, по меньшей мере, двух поворотных элементов этими элементами можно управлять где-то одновременно и/или параллельно и/или двумя руками.
Таким образом, этот способ предлагает при полном отходе от существующих до сих пор норм наименьшее число управляющих элементов и обеспечение необходимой функциональной сложности в управлении по сравнению со сложной обслуживаемостью поворотных элементов из-за большого количества управляющих элементов. При этом, при применении, по меньшей мере, двух поворотных элементов удобно, если ими управляют отчасти одновременно и/или параллельно и/или двумя руками. Потому что таким образом можно просто, быстро и надежно передавать также и сложные управляющие сигналы.
Поставленная выше задача решается с помощью заявленного способа управления исполнительным приводом, причем исполнительный привод имеет устройство управления, по меньшей мере, с одним поворотным элементом, причем решается дополнительно за счет того, что все управляющие сигналы, необходимые для работы исполнительного привода, передаются бесконтактным путем через корпус во внутреннюю камеру исполнительного привода. Этот способ предлагается, в частности, для применения в тех случаях, когда предъявляются высокие требования в отношении взрывозащищенности, так что в корпусе исполнительного привода, по возможности, следует исключить сквозные отверстия.
Представленный способ согласно изобретению можно выгодным образом усовершенствовать, если управляющие сигналы передавать на исполнительный привод исключительно таким образом, что, по меньшей мере, один поворотный элемент поворачивается из первого положения равновесия в соседнее положение равновесия. Альтернативно или дополнительно поворотный элемент может отклоняться также из положения равновесия в определенные точки переключения для передачи управляющих сигналов. Для простоты управления здесь особенно выгодно, что и положения равновесия, и точки переключения можно определять путем активного осязания. Для этого изобретение предлагает, в частности, фиксирование, по меньшей мере, одного поворотного элемента в положениях равновесия.
Еще один усовершенствованный вариант представленного здесь изобретения предусматривает возможность при помощи упомянутого магнитного штыря переключаться между ручным управлением с помощью, по меньшей мере, одного поворотного элемента, и управлением при помощи магнитного штыря. При этом выгодным образом переход от одного типа управления к другому осуществляется при помощи магнитного штыря.
Предложенное изобретение относится к любым комбинациям предпочтительных форм выполнения, если только они не являются взаимоисключающими.
Изобретение описывается более подробно с помощью примеров выполнения, однако не ограничивается этими примерами выполнения.
Другие примеры выполнения возникают в результате сочетания признаков отдельных или нескольких пунктов формулы между собой и/или сочетания с отдельными или несколькими признаками соответствующего примера выполнения. В частности, формы выполнения изобретения можно извлечь из последующего описания предпочтительного примера выполнения в сочетании с общим описанием, пунктами формулы, а также чертежами.
Фиг. 1 вид в аксонометрии спереди крышки корпуса заявленного
исполнительного привода с размещенным на нем заявленным устройством управления с двумя поворотными элементами;
Фиг. 2 фронтальный вид спереди крышки корпуса исполнительного привода из
Фиг. 1;
Фиг. 3 вид сбоку в поперечном сечении крышки корпуса исполнительного привода из Фиг. 1;
Фиг. 4 вид в аксонометрии сзади внутреннего поворотного элемента заявленного устройства управления;
Фиг. 5 перспективный вид сзади внешнего поворотного элемента заявленного устройства управления;
Фиг. 6 фронтальный вид сзади обоих вставленных друг в друга поворотных элементов Фиг. 4 и 5, а также укрупненный вид, показывающий стопорный механизм;
Фиг. 7 вид сверху на оба вставленных друг в друга поворотных элемента Фиг. 4 и 5;
Фиг. 8 задний вид устройства управления, показывающий оба поворотных элемента, а также дисковый кулачок;
Фиг. 9 вид сбоку поперечного сечения устройства управления, показывающий
систему крепления обоих поворотных элементов;
Фиг. 10 фронтальный вид исполнительного привода после снятия крышки корпуса, так что видна плата с датчиками магнитного поля, находящаяся за крышкой корпуса внутри исполнительного привода;
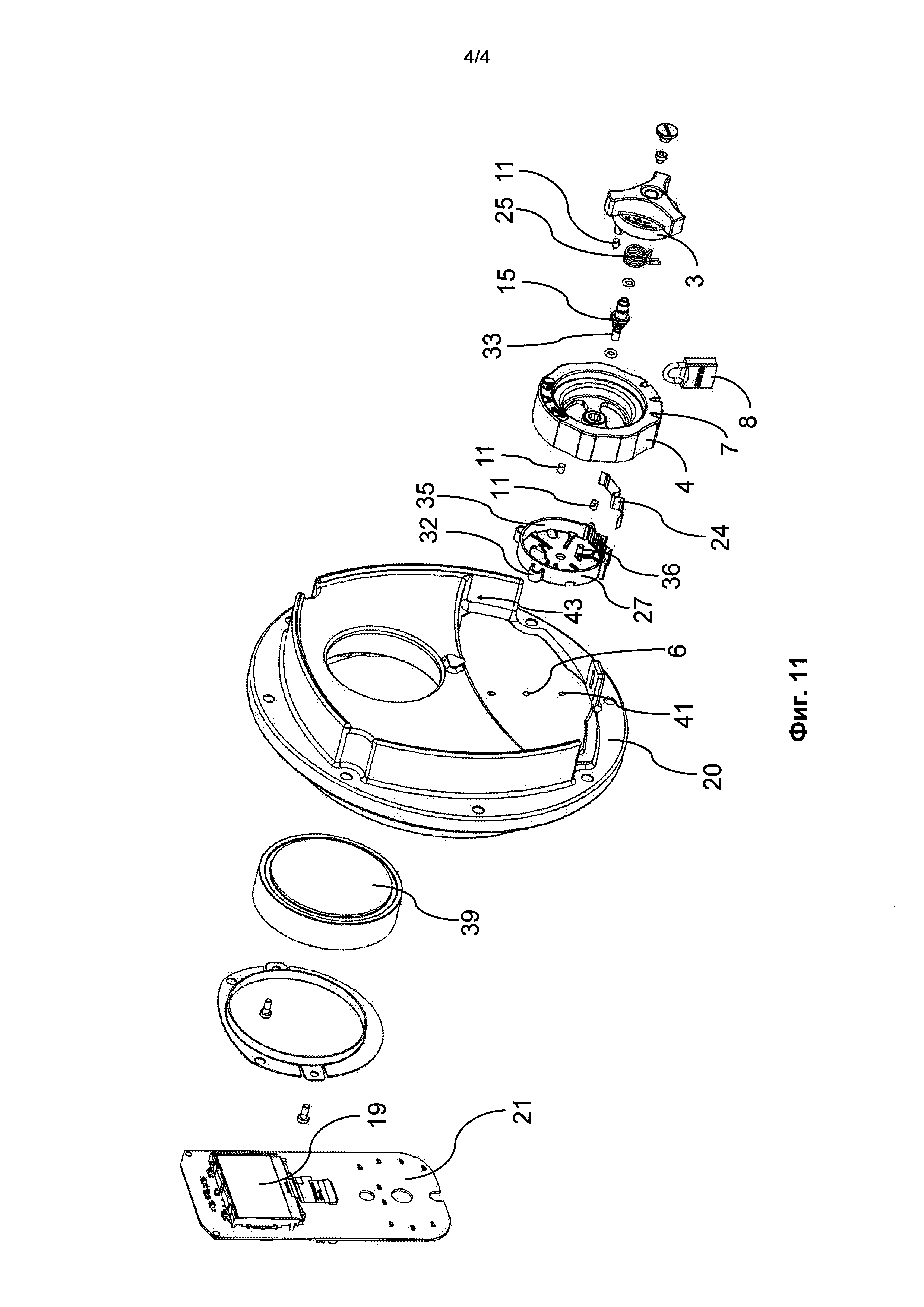
Фиг. 11 перспективное объемное изображение с пространственным разделением деталей заявленного исполнительного привода с описанным выше устройством управления.
На Фиг. 1 показана крышка корпуса 20 как часть корпуса 14 исполнительного привода 1, которая, как видно на Фиг. 3, снаружи огораживает защищенную внутреннюю камеру 10 исполнительного привода 1. Для управления исполнительным приводом 1 с внешней стороны на крышке корпуса 20 размещено устройство управления 2, которое, как показано на Фиг. 1, имеет внутренний поворотный элемент 3 и внешний поворотный элемент 4.
Как можно видеть на изображенном поперечном сечении крышки корпуса 20 на Фиг. 3, оба поворотных элемента 3, 4 расположены концентрично друг относительно друга, так что они имеют возможность вращаться независимо друг от друга вокруг одной общей оси вращения 5.
Для этого оба поворотных элемента 3, 4 установлены с возможностью вращения на общей неподвижной оси 15 (ср. также Фиг. 9). Ось 15 образует шейку 26 с резьбой 33, которая ввинчена в приемное устройство 6 на корпусе 14, точнее на крышке корпуса 20 исполнительного привода 1. Приемное устройство 6 выполнено в виде глухого отверстия с внутренней резьбой, подходящей для шейки 26 оси 15. Ось 15 и приемное отверстие 6 определяют тем самым ось вращения 5 устройства управления 2.
Благодаря резьбовому соединению, выполненному между приемным устройством 6 и шейкой 26 оси 15, устройство управления 2 можно без каких-либо повреждений снять с исполнительного привода 1, вывинтив ось 15 из приемного устройства 6. После снятия устройства управления 2 имеется доступ к находящейся под ним внешней поверхности крышки корпуса 20, что дает возможность описанного выше управления исполнительным приводом 1 с помощью магнитного штыря.
Как можно видеть на Фиг. 3, на устройстве управления 2, точнее на дисковом кулачке 27, выполнены другие шейки 26, входящие в соответствующие углубления 7 крышки корпуса 20. Таким образом, дисковый кулачок 27 служит в качестве опорной пластины для других надстроек.
Шейки 26 дискового кулачка 27 предохраняют устройство управления 2 от проворачивания. Поэтому достаточно одного единственного резьбового соединения, чтобы устройство управления 2 соединить с исполнительным приводом 1 с защитой от проворачивания.
Достойно внимания техническое решение, показанное на Фиг. 3 и заключающееся в том, что крышку корпуса 20, в частности, в области устройства управления 2, можно выполнить без отверстий, так как управляющие сигналы можно передавать во внутреннюю камеру 10 с помощью описанной выше магнитной связи. Поэтому устройство управления 2 не имеет никаких электронных устройств и является безотказным.
Как хорошо видно на Фиг. 1, на внешнем поворотном элементе 4 выполнены три углубления 7 в виде канавок. В каждую канавку 7 можно вставить механический фиксатор, чтобы зафиксировать положение внешнего поворотного элемента 4 и защитить его от несанкционированного доступа. Для этого механический фиксатор 8 входит в соответствующее углубление 7 корпуса 4, как это видно на Фиг. 2 и Фиг. 3.
Внешний поворотный элемент 4 можно устанавливать в трех разных положениях равновесия 9, обозначенных на Фиг. 2 буквами а, b и с для настраивания разных режимов работы исполнительного привода 1. Представленные на Фиг. 2 (вид спереди) положения равновесия 9а, 9b и 9с соответствуют при этом положениям равновесия 9 на Фиг. 6 (вид сзади устройства управления 2), также обозначенным буквами а, Ъ и с, причем согласно виду сзади направленность на Фиг. 6 является обратной по сравнению с Фиг. 2.
Как видно на Фиг. 4 и 5, каждый из двух поворотных элементов 3, 4 имеет по одному упругому элементу 16. У внешнего поворотного элемента 4 упругий элемент 16 выполнен в виде плоской пружины 24.
Упругий элемент 16 внутреннего поворотного элемента 3, наоборот, выполнен в виде винтовой пружины 25. На примере выполнения, представленном на Фиг. 4, концы упругого элемента 16 внутреннего поворотного элемента 3 имеют лапки, так что он образует витую изгибную пружину. Для закрепления этой витой изгибной пружины на внутреннем поворотном элементе выполнен захват 37. Как показано на Фиг. 6 и 11, на дисковом кулачке 27 выполнен фиксирующий элемент 36, который в зависимости от отклонения внутреннего поворотного элемента 3 фиксирует одну из двух лапок витой изгибной пружины.
С помощью упругих элементов 16 (т.е. плоской пружины 24 и винтовой пружины 25) можно создать возвращающие силы, которые оператор может активно осязать, т.е. оператор может чувствовать отклонение соответствующего поворотного элемента 3, 4. Как видно на Фиг. 5 и 6, на плоской пружине 24 внешнего поворотного элемента 4 выполнен выступ 30, с помощью которого плоская пружина 24 может входить в соответствующие углубления 7, выполненные на дисковом кулачке 27 устройства управления 2. На укрупненном изображении Фиг. 6 видно, что углубление 7 дискового кулачка 27 сочетается с выпуклым концом выступа 30 плоской пружины 24, которая образует фиксирующую защелку 23 (ср. Фиг. 5). Поэтому плоская пружина 24 может надежно заскакивать в углубление 7. Другими словами, благодаря взаимодействию плоской пружины 24 с дисковым кулачком 27 получается стопорный механизм 18.
При вращении внешнего поворотного элемента 4 относительно неподвижного дискового кулачка 27, прилегающего своей плоскостью к корпусу 14, выступ 30 плоской пружины 24, которая перемещается вместе с внешним поворотным элементом 4, совершает движение вдоль зажимной направляющей 17 дискового кулачка 27. При этом, на зажимной направляющей 17 выполнены различные уклоны, так что при увеличивающемся отклонении от положения равновесия 9 постоянно возрастает возвращающая сила, созданная плоской пружиной 24 и действующая на внешний поворотный элемент 4.
При более внимательном рассмотрении укрупненного вида Фиг. 6 обращает на себя внимание то, что уклон зажимной направляющей 17 резко возрастает в том месте, в котором на дисковом кулачке 27 выполнен острый выступ. Таким образом, степень нарастания возвращающей силы увеличивается не только с отклонением внешнего поворотного элемента 4, но и дальше ощутимо увеличивается и именно тогда, когда плоская пружина 24 доходит до выступа дискового кулачка 27. Таким образом, путем осязания можно определить точку переключения 31, которую нужно преодолеть, например, если оператор захочет осуществить переключение из положения равновесия 9а, показанного на Фиг. 6, в положение равновесия 9b.
Кроме того, на дисковом кулачке 27 выполнены два концевых упора 32 в форме дугообразных изгибов. В эти концевые упоры 32 упираются выступы 30, выполненные на внешнем поворотном элементе 4, так что вращение внешнего поворотного элемента 4 в задаваемой области углов ограничено, как это можно легко понять, взглянув на Фиг. 6.
Как показано на Фиг. 9, внутренний поворотный элемент 3 и внешний поворотный элемент 4 по отдельности поддерживаются осью 15, которая также задает общую ось вращения 5. Таким образом, оба поворотных элемента 3, 4 могут поворачиваться независимо друг от друга и, в частности, навстречу друг другу, что способствует реализации сложных функций управления.
Если, например, внешний поворотный элемент 4 повораивается при неподвижном внутреннем поворотном элементе 3, то за счет описанной выше плоской пружины 24 будет действовать первая возвращающая сила, как только внешний поворотный элемент 4 отклонится из одного из трех положений равновесия 9а, 9b и 9с.
Если, напротив, внешний поворотный элемент 4 нужно переместить, например, из положения равновесия 9а, показанного на Фиг. 6, в положение равновесия 9b, то оператор должен преодолеть вторую возвращающую силу, которая больше, чем возвращающая сила, упомянутая выше. Эта вторая возвращающая сила действует в уже описанных точках переключения 31. В примере выполнения, представленном на Фиг. 6, вторая возвращающая сила действует как раз тогда, когда плоская пружина 24 должна преодолеть выступ, выполненный на дисковом кулачке 27 между положениями равновесия 9а и 9b. При этом резкое возрастание уклона зажимной направляющей обеспечивает то, что это переключение оператор ощущает.
В частности, двуручное и одновременное управление внутренним поворотным элементом 3 и внешним поворотным элементом 4, как это показано на Фиг. 7, существенно облегчается за счет того, что, во-первых, внешний поворотный элемент 4 выступает над внутренним поворотным элементом 3 в радиальном направлении (ср. обе точечные вертикальные линии) и, кроме того, внутренний поворотный элемент 3 выступает над внешним поворотным элементом 4 в осевом направлении (как показывают обе точечные горизонтальные линии на Фиг. 7). Ибо благодаря этому при управлении в перчатках можно хорошо обхватить соответствующий поворотный элемент.
Пример выполнения устройства управления 2, представленный на Фиг. 6, имеет еще одну функцию, как это показано с помощью области углов, обозначенных позицией 22: так, внешний поворотный элемент 4, всякий раз исходя из одного из положений равновесия 9а, 9b и 9с, отклоняется навстречу описанной выше первой возвращающей силе, а именно в оба направления вращения. Благодаря такому «качанию» внешнего поворотного элемента 4 можно ловко перемещаться туда-сюда, например, внутри меню. Благодаря действующим возвращающим силам внешний поворотный элемент 4 каждый раз автоматически возвращается в исходную позицию, т.е. в положение равновесия 9.
Чтобы для такого движения качания имелась достаточно большая область перемещения, в представленном на Фиг. 6 примере выполнения соседние положения равновесия 9, т.е., например, положения 9а и 9b разнесены между собой на 25°. Для самих движений качания имеется область углов примерно +/- 10°, которую можно определять с помощью датчиков магнитного поля второго типа 13 (ср. Фиг 10).
Второй аспект изобретения, представленный на Фигурах, состоит в бесконтактной передаче управляющих сигналов, заданных с помощью поворотных элементов 3 и 4, на исполнительный привод 1, точнее в защищенную внутреннюю камеру 10 исполнительного привода. Так как, как это хорошо можно видеть на Фиг. 3, крышка корпуса 20 выполнена в области устройства управления 2 без отверстий. На соответствующей обратной стороне, обращенной к корпусу 14, во внешний поворотный элемент 4 вставлены два магнита 11, а во внутренний поворотный элемент 3 вставлен другой магнит 11, как это показано на Фиг. 4 и 5. Соответственно этим магнитам 11 на внутренней стороне, т.е. в защищенной внутренней камере 10 и тем самым за крышкой корпуса 20 на плате 21 расположены несколько датчиков магнитного поля 12, 13, 34, представленных на Фиг. 10 в виде заштрихованных кружочков.
При этом, для обнаружения трех положений равновесия 9а, 9b и 9с (ср. Фиг. 2) внешнего поворотного элемента 4 предусмотрены три датчика (N=3) магнитного поля первого типа 12 (ср. Фиг. 10). Зато на плате 21 расположены четыре датчика (N=3+1=4) магнитного поля второго типа 13. Этих четырех датчиков магнитного поля 13 как раз достаточно для определения в каждом из трех положений равновесия 9а, 9b и 9с движений качания, т.е. вращательных движений внешнего поворотного элемента 4 и, в частности, примененного при этом направления вращения (по часовой стрелке или против часовой стрелки).
Как показано на Фиг. 10, все семь датчиков магнитного поля первого и второго типа 12, 13, предназначенные для определения положений равновесия 9 или управляющих движений, находятся на одной общей окружности. Эта окружность как раз соответствует пути, который проходят оба магнита 11 внешнего поворотного элемента 4 (показано на Фиг. 8) при вращении поворотного элемента 4. Как хорошо видно на Фиг. 8, оба магнита 11 внешнего поворотного элемента 4 расположены на внешнем поворотном элементе 4 радиально снаружи, так что получается соответственно большой диаметр упомянутой окружности на Фиг. 10. Такое расположение выгодно для повышения угловой разрешающей способности при считывании управляющих движений поворотного элемента 4.
Для считывания вращательных управляющих движений внутреннего поворотного элемента, точнее его магнита 11, на плате 21 (Фиг. 10) имеются два других датчика магнитного поля третьего типа 34.
На Фиг. 9 хорошо видно, что единственный магнит 11 внутреннего поворотного элемента 3 - аналогично обоим магнитам 11 внешнего поворотного элемента 4 - расположен аксиально внутри, т.е. на задней стороне поворотного элемента 3, обращенной к корпусу 14 исполнительного привода 1. На Фиг. 3, показывающей поперечное сечение, видно, что такое расположение выгодно для сведения к минимуму дистанции между датчиками магнитного поля 12, 13, 34, расположенными на внутренней стороне, и соответствующим магнитом 11.
Кроме того, на Фиг. 5, 8 и 9 видно, что область внутреннего поворотного элемента 3, имеющего свой единственный магнит 11, направлена, с одной стороны, в проходное отверстие 38, выполненное в дисковом кулачке 27, а с другой стороны, в другое проходное отверстие 38 внешнего поворотного элемента 4 (ср. Фиг. 5). Как показано на Фиг. 3, этим достигается то, что магнит 11 расположен как можно ближе к внешней стенке корпуса 14 исполнительного привода и тем самым как можно ближе к датчикам магнитного поля 34 во внутренней камере 10. Это выгодно тем, что на датчик магнитного поля можно воздействовать, по возможности, наиболее сильным магнитным полем.
В примере выполнения изобретения, представленном на Фигурах, магнит 11 внешнего поворотного элемента 4, показанный на Фиг. 8 (вид сзади) слева внизу, соотносится со всеми положениями равновесия 9а, 9b и 9с (ср. Фиг. 2). Если, например, на Фиг. 2 внешний поворотный элемент 4 поворачивается против часовой стрелки из положения равновесия 9с в положение равновесия 9b, а затем в положение равновесия 9а, то описанный магнит 11 внешнего поворотного элемента 4 перекрывает положения, обозначенные на Фиг. 10 буквами с, b, а. Другими словами, в каждом положении равновесия 9 один из датчиков магнитного поля первого типа 12, представленных на Фиг. 10, образует вместе с упомянутым магнитом 11 (на Фиг. 8 слева внизу на внешнем поворотном элементе) пару, соотнесенную с соответствующим положением равновесия 9а, 9b или 9с.
Если внешний поворотный элемент 4 находится, например, в положении равновесия 9с (Фиг. 2), то оба датчика магнитного поля второго типа 13 (Фиг. 10) расположены на плате 21 для обнаружения отклонений внешнего поворотного элемента 4 в направлении движения часовой стрелки или против него из положения равновесия 9с. Путем обработки сигналов датчиков магнитного поля первого типа 12 и второго типа 13 можно также сделать вывод о направлении вращения поворотного элемента 4.
При этом, на Фиг. 10 соседствующие между собой датчики магнитного поля первого или второго типа 12, 13 разнесены между собой на плате 21 таким образом, что их области индикации магнитного поля не перекрываются. Благодаря этому обеспечивается то, что в каждом положении внешнего поворотного элемента 4 каждый раз только один из датчиков магнитного поля первого типа 12 или только один из датчиков магнитного поля второго типа 13 активируется магнитами 11 внешнего поворотного элемента 4 и тем самым формирует соответствующий сигнал.
При совместном обозрении Фиг. 2, 8 и 10 становится ясно, что самый верхний на Фиг. 10 датчик магнитного поля второго типа 13 предназначен для регистрации отклонения внешнего поворотного элемента 4 из положения равновесия 9с в направлении движения часовой стрелки, а находящийся под ним, т.е. второй сверху датчик магнитного поля второго типа 13 служит для регистрации отклонения внешнего поворотного элемента 4 из положения равновесия 9с в направлении против движения часовой стрелки (ср. также Фиг. 2).
Другой аспект предложенного изобретения заключается в выполнении сложного стопорного механизма 18, принцип действия которого уже упоминался в связи с Фиг. 6. Как показывает укрупненный вид Фиг. 6, М-образная плоская пружина 24 прочно соединена с внешним поворотным элементом 4. Этот упругий элемент 16 вставлен при этом во внешний поворотный элемент 4 таким образом, что оба конца 29 плоской пружины 24 свободны в своем движении. Это достигается за счет того, что плоская пружина 24 закреплена между двумя опорами 28, выполненными на внешнем поворотном элементе 4 и находящимися на расстоянии от концов 29 плоской пружины 24. Так как плоская пружина 24 может поворачиваться вокруг опоры 28, можно избежать жесткого зажатия и тем самым преждевременной усталости плоской пружины 24.
С помощью описанного выше выступа 30, выполненного на плоской пружине 24, входящего в соответствующие углубления 7 на дисковом кулачке 27 и, в частности, взаимодействующего с разными уклонами на зажимной направляющей 17 дискового кулачка, на поворотный элемент 4 могут действовать как удерживающие силы, так и возвращающие силы, которые оператор может чувствовать путем активного осязания. При этом выгодно, что оператор во время работы с устройством управления 2 может смотреть на дисплей 19, показанный на Фиг. 1. Таким образом, оператор может, даже не бросая взгляд на устройство управления 2, только на основании осязаемого им ответного сигнала при отклонении поворотных элементов 3 и 4 или при переключении между отдельными положениями равновесия 9 быстро, точно и не утомляясь обслуживать устройство управления 2. Таким образом, управление исполнительным приводом 1 существенно упрощается и ускоряется по сравнению с обычными переключателями.
У представленной на Фиг. 6 М-образной плоской пружины 24 возвращающая сила тем больше, чем дальше радиально снаружи находится выпуклый конец выполненного посередине выступа 30 плоской пружины 24. Поэтому в примере выполнения, представленном на Фиг. 6, созданная плоской пружиной 24 возвращающая сила имеет максимальное значение как раз тогда, когда плоская пружина 24 перекрывает находящиеся радиально снаружи выступы между соседствующими между собой зажимными направляющими 17 дискового кулачка 27.
Для повышения надежности управления исполнительным приводом 1 изобретение предлагает способ, с помощью которого исполнительным приводом 1 можно управлять с помощью магнитного штыря. При совместном рассмотрении Фиг. 3 и 10 видно, что после снятия устройства управления 2 с крышки корпуса 20 исполнительного привода 1 (ср. Фиг. 3) датчики магнитного поля 12, 13, 34, расположенные на внутренней стороне на плате 21, отделены от внешней среды только лишь крышкой корпуса 20. Таким образом, достаточно поместить штырь с намагниченным наконечником вблизи расположения датчиков магнитного поля 12, 13, 34, обозначенных на Фиг. 1 заштрихованными кружочками, чтобы соответствующие сигналы управления были считаны.
Чтобы при этом упростить управление, можно предусмотреть, чтобы после снятия устройства управления 2 с исполнительного привода 1 оператор с помощью магнитного штыря и, например, проводя по активной поверхности дисплея 19, сначала перевел исполнительный привод с ручного управления на управление с помощью штыря. Для этого, например, можно предусмотреть, чтобы определенные датчики магнитного поля 12, 13, 34 приводились в действие с помощью магнитного штыря последовательно в определенном порядке.
Как представлено на Фиг. 1, к устройству управления 2 имеется доступ как со стороны, т.е. снизу, так и спереди, так что, в частности, возможно управление сразу двумя руками. При этом, например, левая рука управляет внешним поворотным элементом 4, а правая рука - внутренним поворотным элементом 3.
Для возможности использования движений качания внешнего поворотного элемента 4 для ввода управляющих сигналов, предусмотрены определенные точки переключения 31, показанные на Фиг. 6. Можно, например, предусмотреть, чтобы соответствующий управляющий сигнал сработал только тогда, когда поворотный элемент 4 или применяемый для этого магнит 11 достиг уже упомянутой точки переключения 31 или пунктов переключения, показанных на Фиг. 6.
Благодаря заскакиванию выступа 30 плоской пружины 24 в соответствующее углубление 7 дискового кулачка 27 обеспечивается надежная фиксация внешнего поворотного элемента 4 в соответствующем положении равновесия 9. Таким образом, имеется всегда определенное исходное положение, исходя из которого можно выполнять вращательные управляющие движения.
Наконец, на Фиг. 11 представлено перспективное объемное изображение с пространственным разделением деталей устройства управления 2, крышки корпуса 20, а также показана защищенная ею плата 21. Хорошо видны, в частности, резьба 33, выполненная на оси 15, круговой бортик 35 дискового кулачка 27 и приемное устройство 6 в виде глухого отверстия с внутренней резьбой, предназначенное для принятия оси 15.
На Фиг. 3 показан еще один признак, имеющий, пожалуй, самостоятельное изобретательское свойство: видно, что смотровое окошко 39 встроено в приемник 40 корпуса 14, причем приемник 40 имеет такие размеры и расположен таким образом, что плату 21, на которой находятся датчики магнитного поля 12, 13, 34, можно установить за смотровым окошком 39. При этом, в частности, глубина приемника 40 соотнесена с толщиной смотрового окошка 39. Таким образом, снаружи на корпусе 14 сформирован уступ 43, образующий механическую защиту для устройства управления 2. При этом, кроме того, выгодно, что можно применять одну единственную плату, на которой размещены как датчики магнитного поля 12, 13, 34, так и упомянутый выше дисплей 19.
В общем, для улучшения удобства управления исполнительным приводом 1 предлагается отказаться от выключателей и вместо них установить концентрично друг относительно друга, по меньшей мере, два поворотных элемента 3, 4, т.е. приводимых во вращение управляемых элемента, так чтобы ими можно было управлять двумя руками и при этом они могли вращаться по отдельности и независимо друг от друга преимущественно вокруг одной общей оси 5. Кроме того, предлагается переносить вращательные движения отклонения обоих поворотных элементов 3, 4 всякий раз с помощью магнитной связи через участок корпуса исполнительного привода, не имеющий отверстий, в его внутреннюю камеру 10, так чтобы для считывания магнитных полей можно было применять обычные датчики Холла, а корпус 14 исполнительного привода 1 выполнить взрывозащищенным. К тому же это условие позволяет при отказе поворотных элементов 3, 4, например, из-за обледенения, переносить магнитные поля, необходимые для управления, во внутреннюю камеру 10 с помощью магнитного штыря, так что можно обеспечить высокую эксплуатационную безопасность и надежность при всех обстоятельствах.
Перечень обозначений позиций
1 исполнительный привод
2 устройство управления
3 внутренний поворотный элемент
4 внешний поворотный элемент
5 ось вращения
6 приемное устройство
7 углубление
8 механический фиксатор
9 положение равновесия
10 внутренняя камера
11 магнит
12 датчик магнитного поля первого типа
13 датчик магнитного поля второго типа
14 корпус (исполнительного привода)
15 ось
16 упругий элемент
17 зажимная направляющая
18 стопорный механизм
19 дисплей
20 крышка корпуса
21 плата
22 область углов
23 фиксирующая защелка
24 плоская пружина
25 винтовая пружина
26 шейка
27 дисковый кулачок
28 опора
29 конец (плоской пружины)
30 выступ
31 точка переключения
32 концевой упор
33 резьба
34 датчик магнитного поля третьего типа
35 бортик
36 фиксирующий элемент
37 захват
38 проходное отверстие
39 смотровое окошко
40 приемник (корпуса)
41 углубление (в корпусе)
42 углубление (для упругого элемента)
43 уступ
Реферат
Изобретение относится к электротехнике. Технический результат заключается в повышении надежности и уменьшении массогабаритных показателей исполнительного привода. Исполнительный привод (1) имеет устройство управления (2) для управления исполнительным приводом. Устройство управления (2) имеет внутренний поворотный элемент (3) и внешний поворотный элемент (4). Поворотные элементы (3, 4) установлены концентрично относительно друг друга и выполнены с возможностью поворота вокруг одной общей оси (5) независимо друг от друга. Для одного из поворотных элементов (3, 4) выполнено по меньшей мере одно положение равновесия (9). Поворотный элемент (3, 4) выполнен с возможностью отклонения из указанного по меньшей мере одного положения равновесия (9) до определенной точки переключения (31) против первой возвращающей силы. Управляющий сигнал приводят в действие только тогда, когда поворотный элемент (3, 4) достигает указанную точку переключения (31). Поворотный элемент (3, 4) выполнен с возможностью перевода из указанного по меньшей мере одного положения равновесия (9) в соседнее положение равновесия (9) против второй возвращающей силы, которая больше, чем первая возвращающая сила. Поворотный элемент (3, 4) удерживается в указанном по меньшей мере одном положении равновесия (9) при помощи стопорного механизма (18). Дополнительный управляющий сигнал является передаваемым на исполнительный привод (1) посредством поворачивания соответствующего поворотного элемента (3, 4) из первого положения равновесия (9a) в соседнее положение равновесия (9b). 2 н. и 22 з.п. ф-лы, 11 ил.

Комментарии