Вращающиеся в противоположных направлениях двигатели с линейным выходом - RU2471646C2
Код документа: RU2471646C2
Чертежи







Описание
Область техники
Настоящее описание изобретения относится к вращающимся в противоположных направлениях двигателям с выходом поступательного движения.
Уровень техники
В патенте США № 4981309 описан линейный двигатель для применения в активной автомобильной подвеске.
Краткое описание изобретения
В общем, в некоторых аспектах, исполнительный механизм включает в себя первый вращательный двигатель, второй вращательный двигатель и трансмиссию, соединенную с первым и вторым вращательными двигателями. Трансмиссия преобразует вращение первого вращательного двигателя в первом направлении и одновременное вращение второго вращательного двигателя во втором направлении в поступательное движение выходного вала в одном направлении.
Варианты осуществления изобретения могут включать в себя одно или более из следующего. Первый и второй вращательные двигатели расположены последовательно и вращаются вокруг общей оси. Трансмиссия включает в себя первую шариковую гайку, соединенную с первым вращательным двигателем; вторую шариковую гайку, соединенную со вторым вращательным двигателем, при этом первая и вторая шариковые гайки выполнены с противоположными направлениями резьбы; и шариковый винт, имеющий первый резьбовой участок, соответствующий направлению резьбы первой шариковой гайки, и второй резьбовой участок, соответствующий направлению резьбы второй шариковой гайки. Первый вращательный двигатель вращается вокруг первой оси, а второй вращательный двигатель вращается вокруг второй оси, отличной от первой оси. Трансмиссия включает в себя первую трансмиссию преобразования вращательного движения в поступательное движение, соединенную с первым вращательным двигателем; вторую трансмиссию преобразования вращательного движения в поступательное движение, соединенную со вторым вращательным двигателем; и хомут, соединенный с первой и второй трансмиссиями преобразования вращательного движения в поступательное движение. Как первая, так и вторая трансмиссии преобразования вращательного движения в поступательное движение включают в себя шариковую гайку, соединенную с соответствующим вращательным двигателем, и шариковый винт, соединенный с соответствующей шариковой гайкой и с выходным валом. Подсборка, включающая в себя первый и второй вращательные двигатели, расположена, по меньшей мере, частично внутри цилиндрической винтовой пружины. Первый и второй вращательные двигатели полностью расположены внутри цилиндрической винтовой пружины. Часть выходного вала, выступающая из первого и второго двигателей, расположена внутри пневматического подвешивающего элемента.
Первый усилитель мощности присоединен для приведения в действие, по меньшей мере, первого вращательного двигателя; датчик положения указывает положение трансмиссии; и схема управления, соединенная с кодером и первым усилителем мощности, выполнена для управления усилителем мощности для приведения в действие первого и второго вращательных двигателей совместно, на основе определения положения кодером. Схема управления выводит положение второго вращательного двигателя из положения первого вращательного двигателя, основываясь на комбинации допусков первого и второго вращательных двигателей и первой и второй трансмиссий. Второй усилитель мощности присоединен для приведения в действие второго вращательного двигателя; схема управления также соединена со вторым усилителем мощности. Датчик положения включает вращающийся датчик положения, соединенный с первым вращательным двигателем, и положение второго вращательного двигателя выводится из положения первого вращательного двигателя. Датчик положения включает первый вращающийся датчик положения, соединенный с первым вращательным двигателем, и второй вращающийся датчик положения, соединенный со вторым вращательным двигателем. Датчик указывает перемещение трансмиссии, и схема управления получает команду усилия и выполнена для расчета компенсирующего усилия, основываясь на выраженной инерции трансмиссии и ускорении, рассчитанном от датчика, расчета общего усилия из команды усилия и компенсирующего усилия и управления первым и вторым двигателями, основываясь на общем усилии. Датчик указывает выходное усилие трансмиссии, и схема управления получает команду усилия и определенное выходное усилие и изменяет управляющую команду, обеспечиваемую для первого и второго двигателей, основываясь на разнице между командой усилия и определенным выходным усилием.
Гофрированная трубка окружает часть трансмиссии, проходящую снаружи относительно первого и второго вращательных двигателей на первом конце устройства, и уплотняет внутреннюю часть первого и второго вращательных двигателей от окружающей среды; трансмиссия включает в себя проход, проходящий через выходной вал и соединяющий текучую среду из гофрированной трубки с объемом на втором конце устройства. Трансмиссия выбирается из группы, состоящей из шариковых винтов, роликовых винтов, магнитных винтов, гидростатических винтов, ходовых винтов и винтов с коническими роликами. Буферы, расположенные вдоль оси выходного вала, выполнены для передачи энергии от выходного вала на окружающую конструкцию, когда выходной вал максимально втягивается или выдвигается, таким образом, по меньшей мере, некоторая энергия от выходного вала не соединяется с окружающей конструкцией через первый или второй двигатели.
В общем, в одном аспекте, в автомобильной подвеске, соединяющей сборку колеса с подрессоренной массой, подвеска включает в себя активный подвешивающий элемент, соединенный со сборкой колеса и подрессоренной массой. Подвеска, кроме того, включает в себя первый вращательный двигатель, второй вращательный двигатель и трансмиссию, соединенную с первым и вторым вращательными двигателями. Трансмиссия преобразует вращение первого вращательного двигателя в первом направлении и одновременное вращение второго вращательного двигателя во втором направлении в поступательное движение выходного вала в одном направлении.
В некоторых примерах рычажные механизмы, соединенные со сборкой колеса и подрессоренной массой, управляют геометрией относительного движения между сборкой колеса и подрессоренной массой.
В общем, в одном аспекте, в автомобильной подвеске, соединяющей сборку колеса с подрессоренной массой, подвеска включает в себя активный подвешивающий элемент, включающий в себя первый вращательный двигатель и второй вращательный двигатель. Первый и второй вращательные двигатели соединены с одним из сборки колеса и подрессоренной массы и расположены линейно таким образом, чтобы вращаться вокруг общей оси. Первая шариковая гайка соединена с первым вращательным двигателем, а вторая шариковая гайка соединена со вторым вращательным двигателем. Первая и вторая шариковые гайки выполнены с противоположными направлениями резьбы. Шариковый винт соединен с другим из сборки колеса и подрессоренной массы и имеет первый резьбовой участок, соответствующий направлению резьбы первой шариковой гайки, и второй резьбовой участок, соответствующий направлению резьбы второй шариковой гайки, для преобразования вращения первого вращательного двигателя в первом направлении и одновременного вращения второго вращательного двигателя во втором направлении в поступательное движение шарикового винта в одном направлении. Пассивный подвешивающий элемент включает цилиндрическую винтовую пружину, по меньшей мере, частично окружающую активный подвешивающий элемент и соединяющую активный подвешивающий элемент с подрессоренной массой.
В некоторых примерах цилиндрическая винтовая пружина функционально размещена параллельно шариковому винту и соединяет корпус двигателей активного подвешивающего элемента с подрессоренной массой. В некоторых примерах цилиндрическая винтовая пружина функционально размещена параллельно шариковому винту и двигателям и соединяет конец шарикового винта с подрессоренной массой.
Преимущества включают обеспечение линейного исполнительного механизма в компоновочном пространстве, обычно занимаемом элементами пассивной подвески, и использование компактных вращательных исполнительных механизмов, не прикладывая реактивного вращающего момента к окружающей конструкции. Применение трансмиссии, имеющей отличное от единицы передаточное отношение, обеспечивает повышенную гибкость размера элементов и компоновки.
Другие признаки и преимущества будут очевидными из описания и формулы изобретения.
Краткое описание чертежей
Фиг. 1 - вид сборку в разрезе последовательно собранных вращающихся в противоположных направлениях двигателей с трансмиссией линейного выхода;
Фиг. 2A - вид в разрезе пары шариковых гаек;
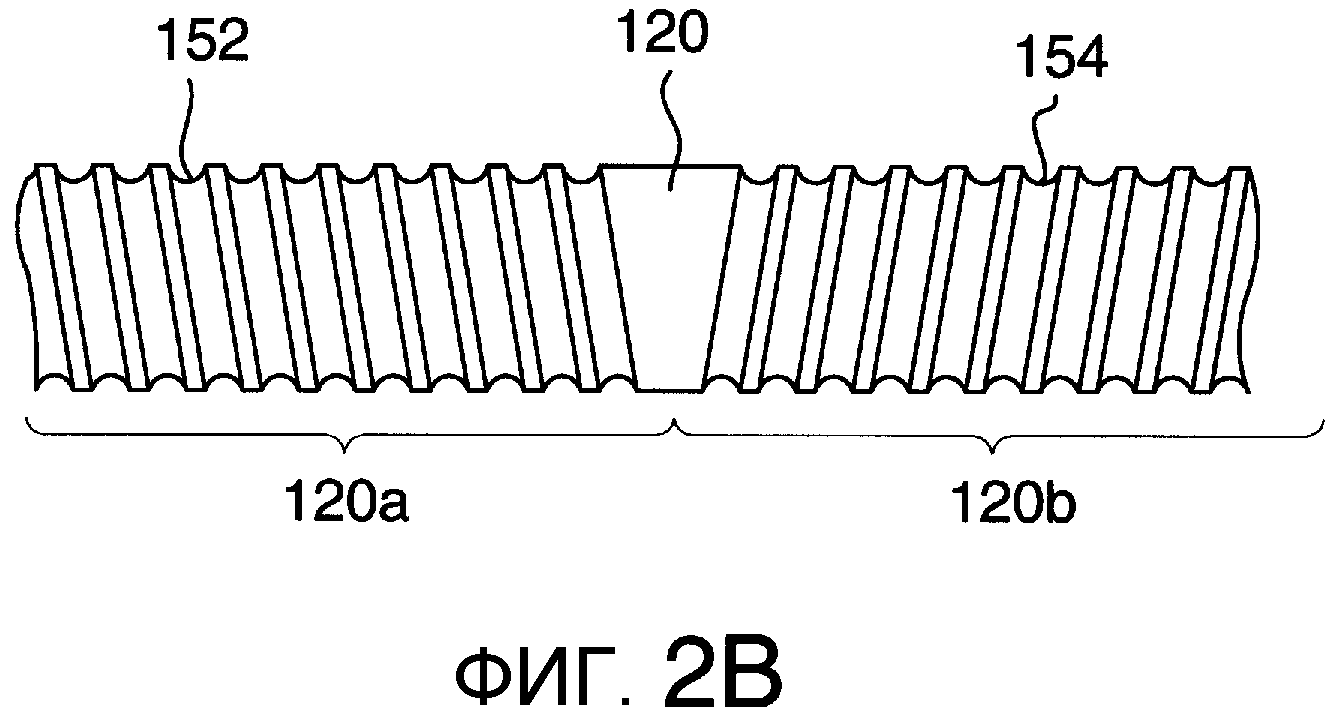
Фиг. 2B - шариковый винт с двумя резьбами;
Фиг. 2C - шариковый винт с двумя резьбами с фиг. 2B в комбинации с шариковыми гайками с фиг. 2A;
Фиг. 3A и 3B - виды в перспективе подвесок колес, включающих в себя двигатель и трансмиссию с фиг. 1;
Фиг. 3C и 3D - схематичные виды в плане подвесок колес, включающих в себя двигатель и трансмиссию с фиг. 1;
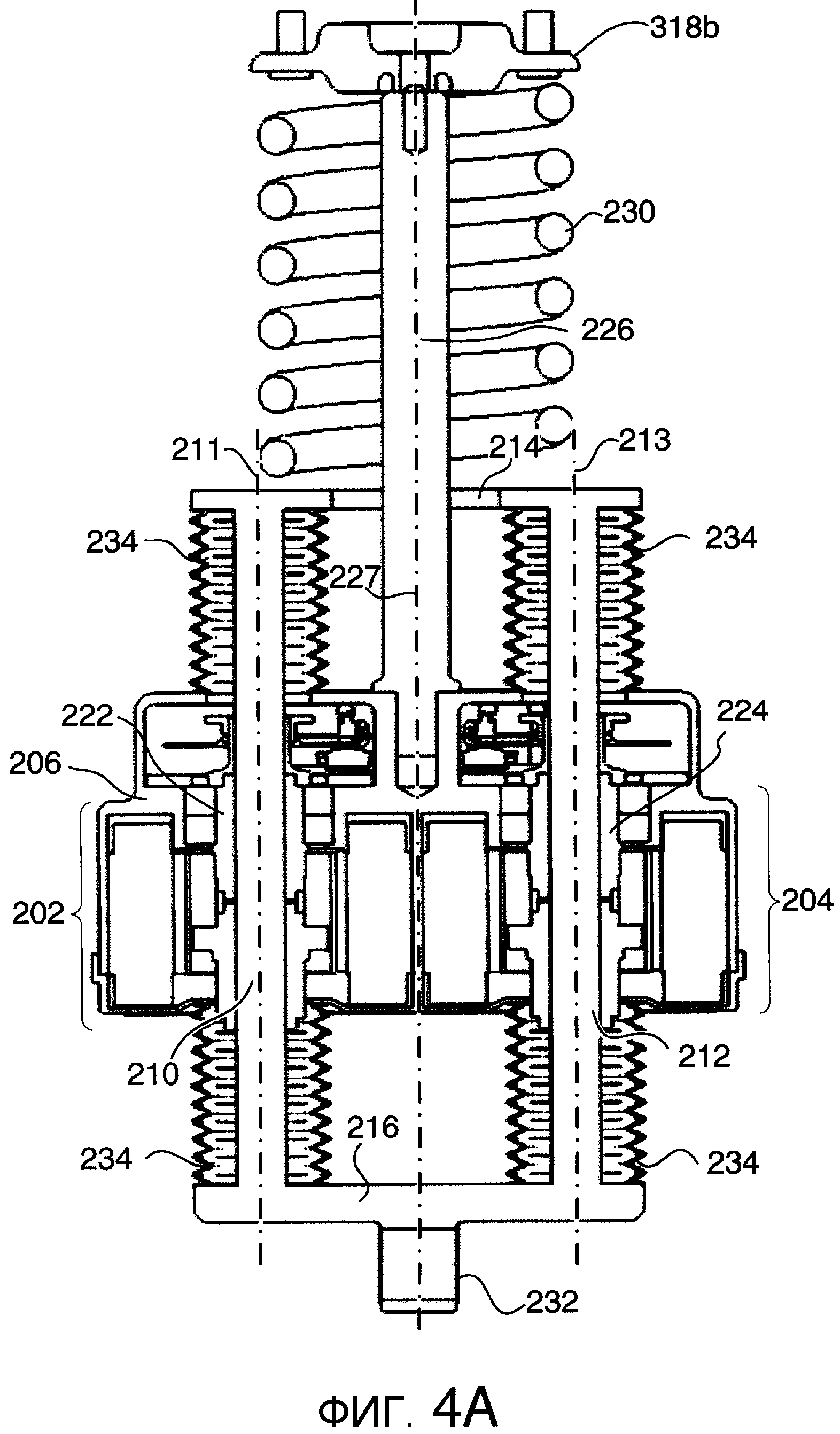
Фиг. 4A - вид в разрезе параллельно расположенных вращающихся в противоположных направлениях двигателей с трансмиссией линейного выхода; и
Фиг. 4B - вид в перспективе параллельно расположенных вращающихся в противоположных направлениях двигателей с трансмиссией линейного выхода.
Подробное описание изобретения
Вращательные двигатели с трансмиссиями, обеспечивающими линейный выход, могут обеспечить аналогичную производительность относительно линейных двигателей, при этом требуя меньше компоновочного пространства, но они обычно порождают вращающие силы реакции, которые прикладывают вращающий момент (также называемый моментом) к выходному валу и к конструкциям, к которым прикреплены двигатели и выходной вал. Как описано ниже, вращающаяся в противоположных направлениях пара вращательных двигателей уменьшает до минимума вращающий момент, который пара прикладывает к поддерживающей конструкции. Трансмиссия соединяет выходы обоих вращающихся в противоположных направлениях двигателей с одним валом линейного выхода. В общем, мы ссылаемся на отдельные комбинации ротора/статора в качестве "двигателей" и на объединенную сборку двигателей и трансмиссии в качестве "исполнительного механизма".
В некоторых примерах, как показано на фиг. 1, линейный исполнительный механизм 100 включает в себя верхний двигатель 102 и нижний двигатель 104. Каждый двигатель образован из статора 106, 108 и ротора 110, 112. В этом примере роторы 110, 112 вращаются вокруг общей оси 114. Роторы 110, 112 соединены с вращающейся частью трансмиссии преобразования вращательного движения в поступательное движение. В примере на фиг. 1 трансмиссия представляет собой трансмиссию шариковинтового типа с вращающимися шариковыми гайками 116, 118 и валом 120 шарикового винта линейного выхода. Трансмиссия показана полностью выдвинутой для ясности иллюстрации. Корпус 122 двигателей размещает двигатели и закрывает один конец сборки исполнительного механизма. Гофрированная трубка 124 закрывает часть выходного вала, которая выступает от корпуса 122 двигателей на другом конце. Гофрированная трубка выдвигается с выходным валом и предотвращает проникновение инородного вещества в двигатели через отверстие в корпусе, через которое проходит выходной вал. В некоторых примерах канал 126 (показан только на концах) в центре выходного вала соединен с отдушинами 128, 130 на каждом конце вала. Так как выходной вал выдвигается и втягивается, объем в гофрированной трубке увеличивается и уменьшается. Для уменьшения изменений давления воздуха в гофрированной трубке воздушный проход, образованный каналом 126 и отдушинами 128, 130, позволяет воздуху протекать между гофрированной трубкой 124 и объемом 132 на противоположном конце корпуса 122 двигателей. Это увеличивает общий объем воздуха, доступный в системе, уменьшая изменение давления в гофрированной трубке. В конце исполнительного механизма, противоположном выходному валу, буфер 134 сжатия предотвращает столкновение выходного вала с корпусом двигателей при полном втягивании, и буфер 135 отдачи предотвращает столкновение выходного вала с корпусом двигателей при полном выдвижении. Располагая буферы 134, 135, конец вала обеспечивает возможность передачи удара от какого-либо сжатия или отдачи непосредственно на внешнюю конструкцию вместо передачи через корпус 122 двигателей. Это также позволяет одной концевой пластине 137 остановить выходной вал при любой степени его перемещения.
Каждый двигатель включает в себя подшипник 140, 142, который обеспечивает возможность вращения ротора, при этом поддерживая точный воздушный зазор между ротором и статором. В некоторых примерах, как на фиг. 1, подшипник 140, 142 и шариковая гайка 116, 118 каждого двигателя составляют единый элемент. Датчик 144 положения соединен с исполнительным механизмом и применяется для определения положения выходного вала. Возможные датчики положения включают круговые или линейные датчики положения прямого действия, датчики скорости и акселерометры с соответствующим дифференцированием или интегрированием, применяющимся для определения требуемых параметров. Круговые и линейные положения выводятся друг из друга, если необходимо, на основе передаточного отношения трансмиссии. В некоторых примерах используются два круговых датчика, тогда как в других примерах используется только один круговой или линейный датчик, как объяснено ниже. Датчик положения указывает положение двигателя и положение выходного вала для управления электронным оборудованием, чтобы обеспечить четкую осведомленность и управление положением исполнительного механизма. В примере с фиг. 1, к каждому двигателю прикреплен отдельный круговой кодер 144, 146 с неподвижной частью 144a, 146a, детектирующей символ на вращающейся части 144b, 146b, соединенной с ротором. В некоторых примерах дополнительный абсолютный датчик положения (не показан) используется для сообщения положения исполнительного механизма алгоритмам внешнего управления.
В примере на фиг. 1 двигатели являются типом двигателей с "подвижным магнитом", так что роторы 110, 112 составлены из магнитов, а статоры 106, 108 включают в себя обмотки. Когда электрический ток проходит через обмотки, создается вращающееся магнитное поле, вызывая вращение роторов вокруг оси 114. В некоторых примерах статоры обмотаны в противоположных направлениях, таким образом совпадающие входные сигналы вызывают вращение двигателей в противоположных направлениях. В некоторых примерах обмотки являются идентичными, а входные сигналы для одного двигателя инвертированы относительно другого с той же самой целью. В других примерах используются подвижная обмотка или другие типы двигателей.
Когда двигатели вращаются, трансмиссия преобразует вращение в поступательное движение. В примере на фиг. 1 шариковые гайки вращаются с роторами и вызывают поступательное движение шарикового винта. Для предотвращения приложения исполнительным механизмом вращающих усилий к окружающей конструкции два двигателя спроектированы и управляются для одновременного вращения в противоположных направлениях. Это требует, чтобы трансмиссия преобразовывала одновременное вращение в двух направлениях в поступательное движение в одном направлении. В некоторых примерах, как показано на фиг. 1, это осуществляется посредством размещения двух двигателей друг над другом и их последовательного соединения с состоящей из двух частей трансмиссией, при этом две части каждая преобразуют вращательное движение в их соответствующих противоположных направлениях в поступательное движение в общем направлении и работают совместно для перемещения одного выходного вала. Для шариковинтовой трансмиссии, как показано более подробно на фиг. 2A-2C, две шариковые гайки 116, 118 изготовлены с их канавками 116a, 118a для шариков, спирально проходящими в противоположных направлениях (в примере с фиг. 2C только два витка резьбы содержат шарики; количество использующихся витков резьбы является проектным решением в любом данном исполнении). Шариковый винт 120 включает в себя резьбы, нарезанные в двух разных направлениях вдоль его длины, первую резьбу 152, приблизительно на половине длины 120a вала и соответствующую первой шариковой гайке 116, и вторую резьбу 154 на остальной части 120b вала и соответствующую второй шариковой гайке 118. Когда собрано, каналы, образованные из выровненных резьб на шариковом винте и канавок на шариковых гайках, заполнены шариками 121, которые способны циркулировать через каналы 116b, 118b возврата шариков. Тип каналов возврата шариков, показанный на фиг. 2A и 2C, представлен только для иллюстрации - различные конструкции канала возврата шариков могут быть использованы в зависимости от таких факторов, как размеры элементов, имеющиеся силы и компоновочные требования. Шарики 121 служат для передачи вращающего момента на шариковой гайке в поступательное движение шарикового винта, или наоборот. В некоторых примерах, как показано на фиг. 1, шариковые гайки короче, чем двигатели, и расположены около середины исполнительного механизма (в противоположность, например, серединам или внешним концам двигателей). Это имеет преимущество увеличения общего хода, возможного для шарикового винта. Два двигателя 102, 104 расположены с зазором между ними (см. фиг. 1), который обеспечивает пространство для секции 120a шарикового винта 120, имеющей первую резьбу 152, чтобы выступать из первого двигателя 102, не входя во вторую шариковую гайку 118. Подобным образом секция 120b шарикового винта 120, имеющая вторую резьбу 154, не входит в первую шариковую гайку 116, когда вал втянут.
Одно ограничение при выборе трансмиссии преобразования вращательного движения в поступательное движение для применения в подвеске заключается в том, что линейный выход должен быть реверсивным, т.е. усилия, прикладываемые к выходному валу неподрессоренной массой, приводят к вращению двигателей без заклинивания. Также является желательным уменьшить до минимума мертвый ход, т.е. изменение направления внешнего усилия на выходной вал должно превращаться в изменение направления вызванного вращения двигателей с минимальным непреобразованным движением. Другое ограничение заключается в том, что выраженная инерция, эффективная инерция трансмиссии, должна быть уменьшена до минимума. То есть трансмиссия должна переходить между вращательным и поступательным движением, не добавляя дополнительной составляющей выраженной инерции, когда исполнительный механизм рассматривается от входа к выходу. Шариковый винт представляет собой один пример трансмиссии, которая обеспечивает гибкость при уравновешивании этих ограничений. Другие примеры трансмиссий, которые могут быть подходящими в некоторых применениях, включают роликовые винты, магнитные винты, гидростатические винты, ходовые винты и винты с коническими роликами.
Усилие, передаваемое шариковинтовой трансмиссией, зависит от количества шариков в области взаимодействия между шариковой гайкой и шариковым винтом, что зависит, в свою очередь, от диаметра винта и количества витков резьбы, содержащих шарики. Количество витков резьбы в области взаимодействия зависит от длины гайки и шага витков резьбы. Увеличенный диаметр шарикового винта позволяет области взаимодействия между шариковой гайкой и шариковым винтом размещать больше шариков на виток резьбы, делая возможным меньшее количество витков резьбы и, следовательно, более короткую гайку для передачи данного усилия. Подобным образом, увеличенный шаг резьбы обеспечивает больше резьб, поэтому больше шариков и, следовательно, бóльшее усилие для данной длины или меньшую длину для данного усилия. Длина шариковых гаек, в свою очередь, накладывает ограничения на общую высоту сборки двигателей. В одном примере усилие, требующее от исполнительного механизма, и компоновочные ограничения на доступную длину для шариковых гаек являются заданными параметрами, и диаметр шарикового винта и шаг резьбы выбираются таким образом, чтобы обеспечить их, при этом уменьшая до минимума выраженную инерцию, рассмотренную ниже.
На фиг. 3A и 3B показаны иллюстративные установки последовательно собранного исполнительного механизма 100 с фиг. 1 в подвеску 300a, 300b транспортного средства. На фиг. 3C показан абстрактный вид подвески 300b фиг. 3B. Кроме исполнительного механизма 100, подвеска 300a, 300b также включает в себя пассивный подвешивающий элемент, пружину 302a, 302b. Подвеска 300a, 300b также включает в себя конструктивные элементы: верхний рычаг 304 независимой подвески, кулак 306 и нижний рычаг 308 независимой подвески. Сборка 310 колеса (фиг. 3C) прикрепляется к кулаку 306 и нижнему рычагу 308 независимой подвески. Сборка 310 колеса связывает подвеску с землей 313. Исполнительный механизм соединен с подвеской посредством втулки 318a и с кузовом 314 транспортного средства посредством второй втулки 318b. В некоторых примерах втулки 318a, 318b представляют собой простые втулки, использующиеся для крепления пассивного амортизатора. Конструктивные элементы поддерживают геометрическую взаимосвязь между ступицей 310 колеса и подрессоренной массой транспортного средства, т.е. кузовом 314 транспортного средства. На видах с фиг. 3A и 3B корпус 122 исполнительного механизма сформован в пластины, которые служат в качестве радиатора.
В некоторых примерах, как показано на фиг. 3A и 3B, пассивный подвешивающий элемент включает цилиндрическую винтовую пружину. Пассивный подвешивающий элемент поддерживает статическую нагрузку транспортного средства таким образом, что исполнительный механизм находится в средней точке его диапазона перемещения, когда транспортное средство находится в состоянии покоя, а исполнительный механизм не приводится в действие. Одно преимущество последовательно собранной конструкции вращающихся в противоположных направлениях двигателей заключается в том, что она может быть спроектирована таким образом, чтобы размещаться в пределах внутреннего диаметра типичной цилиндрической винтовой пружины, как используется в настоящее время в автомобильных подвесках. Пружина может проходить на всей длине исполнительного механизма, как показано на фиг. 3A, присоединяясь между концом выходного вала 120 и конструкцией транспортного средства, или пружина может быть присоединена к корпусу 122 исполнительного механизма вместо выходного вала, как показано на фиг. 3B. На фиг. 3B втулка 316 соединяет пружину 302b с корпусом 122. В некоторых примерах (не показаны) вторая цилиндрическая винтовая пружина проходит от втулки 316 к другому концу исполнительного механизма (нижний конец на фиг. 3B). В таком примере втулка может быть способной скользить вдоль корпуса исполнительного механизма для приспосабливания к относительному движению пружины и исполнительного механизма, при этом предотвращая истирание указанных двух элементов. В примере с фиг. 3B конструкция активной подвески является обратной с двигателями в нижней части (конец со стороны колеса) и шариковым винтом в верхней части, проходящим в кузов 314 транспортного средства. Примеры, использующие пружину меньше, чем на всей длине исполнительного механизма, могут быть осуществлены с ориентацией любого примера.
В некоторых примерах, как показано на фиг. 3D, пассивный подвешивающий элемент включает пневмопружину 320. В пневматической подвеске 300c эластичный резервуар используется в качестве пружинного элемента, и давление воздуха, содержащегося в резервуаре, изменяется для регулирования усилия, прикладываемого резервуаром. В комбинации с активной подвеской пневматический подвешивающий элемент может управляться таким образом, чтобы компенсировать изменения статической нагрузки (например, вес пассажиров), существенно не изменяя общую жесткость системы. В некоторых примерах, как показано, пневмопружина установлена вокруг выходного вала шарикового винта и занимает место гофрированной трубки фиг. 1, уплотняя двигатели относительно наружных элементов. В этом примере конструкция воздушного прохода в выходном вале 120 изменена и проход может быть полностью удален в зависимости от конструкции пневмопружины. Также отметим, что в этом примере конструкция исполнительного механизма является обратной, как на фиг. 3B. Двигатели расположены на конце подвески со стороны колеса, причем выходной вал и пневмопружина проходят вверх в конструкцию 314 транспортного средства. Преимущество этой конфигурации заключается в том, что она обеспечивает конструкции, в которых пневмопружина является более громоздкой, чем сборка двигателей, не требуя изменений конструкции транспортного средства, выполненной для стандартной пассивной подвески, так как имеется больше места в верхней части подвески (в углублении кузова для подвески), чем в ступице колеса. В других примерах конструкция двигателей остается в верхней части, а пневмопружина и шариковый винт располагаются в нижней части подвески. В примере с фиг. 3D ролики 320a в пневмопружине показаны на нижнем конце пневмопружины. В других примерах ролики могут быть расположены на верхнем конце или может быть использована пневмопружина без роликов.
В некоторых примерах двигатель и трансмиссия обеспечивают достаточную конструкционную прочность для подвески, таким образом один или оба рычага независимой подвески могут быть исключены, упрощая подвеску, но увеличивая важность устранения моментов от активных элементов.
В некоторых примерах, как показано на фиг. 4A и 4B, два двигателя 202, 204 расположены с параллельной конфигурацией. Двигатели могут совместно использовать единый корпус 206, как показано, или они могут быть в отдельных корпусах. Два выходных вала 210, 212 на параллельных осях 211, 213 соединены посредством хомута 214 и стержня 216. Для уменьшения реактивного вращающего момента на поддерживающей конструкции, как и в последовательно собранном примере, два двигателя 202, 204 работают в противоположных направлениях. Выходные валы 210, 212 соединены с двигателями посредством трансмиссий 222, 224, как описано выше. Опорный вал 226 вдоль третьей оси 227 поддерживает положение двигателей относительно кузова транспортного средства (не показан) посредством втулки 318b, при этом пружина 230 соединяет хомут 214 с втулкой 318b. Стержень 216 соединен с подвеской посредством соединительного элемента 232 (который соединяется с втулкой 318a, как на фиг. 3C и 3D; не показано). Гофрированные трубки 234 закрывают промежуточные выходные валы 210, 212 в верхней и нижней частях. Параллельная конфигурация обеспечивает аналогичное усилие, что и последовательно собранная конфигурация, но требует меньше вертикального пространства, что является предпочтительным в некоторых применениях.
Применение трансмиссии вносит некоторую гибкость в конструкцию активной подвески, не имеющую место при применении прямого линейного двигателя. В частности, трансмиссия вносит отличное от единицы передаточное отношение, или выигрыш в силе, которое может обеспечить возможность применения меньших двигателей. Передаточное отношение MR для всей системы равно действительной линейной скорости роторов относительно статоров, разделенной на скорость сборки колеса в точке, в которой шина соприкасается с землей, называемой пятном контакта шины. Это общее передаточное отношение является произведением двух передаточных отношений в системе:

где MRk - кинематическое передаточное отношение, вытекающее из геометрии подвески, и MRrot - передаточное отношение трансмиссии преобразования вращательного движения в поступательное движение. Кинематическое передаточное отношение MRk определяется как линейная скорость выходного вала, разделенная на вертикальную составляющую скорости колеса в пятне контакта шины (как показано на фиг. 3C, рассматривая нижний рычаг 308 независимой подвески в качестве рычага, MRk соответствовало бы размещению втулки 318b вдоль рычага 308 относительно общей длины рычага). Передаточное отношение MRrot трансмиссии определяется как скорость роторов относительно статоров, разделенная на скорость выходного вала, функция конструкции шарикового винта и размера двигателей. Для шарикового винта с шагом Pbs и вращательного двигателя с диаметром d ротора, MRrot вычисляется как

В типичной автомобильной подвеске кинематическое передаточное отношение двигателя составляет от 0,5 до 0,65. Для обеспечения единого общего передаточного отношения это привело бы к MRrot в 1,5-2,0, но бóльшие значения MRrot (достигающиеся посредством выбора соответствующего шарикового винта) обеспечивают дополнительную гибкость конструкции. Для постоянной производительности двигателя, называемой бета, объем двигателя оценивается как (1/MR)2. Таким образом, увеличение передаточного отношения обеспечивает возможность использования меньшего двигателя, без необходимости двигателя с бóльшей бета. С другой стороны, увеличенное передаточное отношение приводит к увеличению выраженной инерции, описанному ниже.
Для управления исполнительным механизмом команды посылаются на один или более усилителей, подающих ток к двигателям. Обычно команды указывают усилие, которое исполнительный механизм должен прикладывать к подвеске. Исполнительный механизм применяется для противодействия ускорению неподрессоренной массы (колеса) относительно подрессоренной массы (автомобиля), таким образом автомобиль не испытывает ускорений. Как отмечено выше, трансмиссия вносит составляющую выраженной инерции, не имеющую место в прямом линейном исполнительном механизме. В некоторых примерах усилители, приводящие в действие двигатели, регулируются таким образом, чтобы компенсировать выраженную инерцию, таким образом входной силовой сигнал не требует регулировки, чтобы учесть трансмиссию. Выраженная инерция может быть смоделирована в качестве массы, где воздействие на выходное усилие вследствие той массы основывается на относительных ускорениях автомобиля и колеса. Эффективная выраженная масса вычисляется как

где Jrot - общая инерция вращения системы, типично в единицах измерения кг-м2.
Электромагнитное выходное усилие исполнительного механизма, на колесе, Fем вычисляется из передаточного отношения MRrot трансмиссии:

где d - диаметр ротора, а Tем - электромагнитный вращающий момент. В этом примере свойства двух двигателей с фиг. 1 предполагаются быть одинаковыми и суммироваться в математическую модель равным образом.
Усилие, прикладываемое вращательным двигателем, воздействует на выраженную инерцию трансмиссии, нежели чем непосредственно на неподрессоренную массу. Для исключения эффекта выраженной массы используется регулирование вращательных двигателей, упрощая внешние элементы управления. Для осуществления этого ускорение через выраженную массу измеряется и умножается на выраженную массу для определения корректирующего усилия:

где ac - ускорение кузова автомобиля, а aw - ускорение сборки колеса, и дифференциальное ускорение (ac-aw) является известным от датчика положения (например, с помощью дифференцирования выхода датчика положения и преобразования из углового в линейное ускорение, если необходимо). Это корректирующее усилие затем прибавляется к выходному усилию, требующемуся от схем внешнего управления, таким образом исполнительный механизм в целом обеспечивает требующееся усилие.
В некоторых примерах управляющие расчеты выполняются в диапазоне частот. При низких частотах, приблизительно до 4-6 Гц, вклад составляющей выраженной инерции в передачу ускорений через трансмиссию, от колеса к автомобилю, является пренебрежимо малым, и управление основывается непосредственно на ускорении. При бóльших частотах выраженная инерция является существенной, увеличивая передачу нежелательных ускорений от колеса к автомобилю, и управляющие расчеты учитывают результирующую составляющую массы для уменьшения этого эффекта.
В некоторых примерах выходы кодеров 144a, 146a используются для определения относительного ускорения колеса и автомобиля. Выходы кодеров дважды дифференцируются для преобразования положения в ускорение. В некоторых примерах кодер с дорожками sin/cos используется со следящим фильтром относительно его инкрементного положения. В этом примере ускорение оценивается с внутренней стороны относительно фильтра и используется алгоритмами управления, когда необходимо. Преобразование между угловым положением, определенным кодерами, и линейным выдвижением выходного вала основывается на конструкции трансмиссии, например, для шарикового винта угол поворота делится на шаг резьбы для того, чтобы найти линейное перемещение. В некоторых примерах используется только один кодер, соединенный с одним из двигателей, и положение другого двигателя выводится из известной геометрической взаимосвязи между двигателями и трансмиссией.
Применение одного усилителя увеличивает влияния отклонений (суммирование допусков) и податливостей между элементами. В некоторых примерах это делает относительное выравнивание статоров между двумя двигателями важным допуском при проектировании и изготовлении сборки исполнительного механизма. В некоторых примерах один усилитель используется для приведения в действие обоих двигателей на основе одного кодера. Двигатели выполнены с возможностью создания равного вращающего момента в противоположных направлениях, основываясь на общем входном сигнале, например, посредством выполнения обмоток статоров со сдвигом по фазе 180° (в зависимости от количества полюсов, использующегося в данной конструкции двигателя, другие углы сдвига фаз были бы подходящими).
Когда транспортное средство ускоряется или тормозит (т.е. подвергается ускорению в направлении перемещения, нежели чем вертикально), неподрессоренная масса, обычно податливо смонтированная, подвергается вращающим моментам, некоторые из которых передаются в исполнительный механизм через выходной вал, вращая роторы. Когда применяется только один усилитель, вызванное вращение выводит роторы из фазовой синхронизации, предполагаемой алгоритмами управления. В результате, двигатели могут не создавать равный вращающий момент для общего сигнала, и максимальный вращающий момент уменьшен. В некоторых примерах для противодействия этому двигатели выполнены таким образом, чтобы допускать предполагаемую величину вызванного вращения выходного вала, не выходя достаточно далеко за пределы режима управления, чтобы вызвать проблемы. То есть для предполагаемой степени вызванного вращения изменение относительного вращающего момента между двигателями будет несущественным относительно созданного общего вращающего момента. Это осуществляется, например, посредством выбора двигателей с небольшим общим количеством полюсов, например только 12 полюсов. Примером такого двигателя является двигатель модели K089300 от Parker Bayside, Порт-Вашингтон, шт. Нью-Йорк. В некоторых примерах используется дополнительный датчик положения вала, и контур управления компенсирует изменения усилия, возникающие из-за вызванных вращающих моментов, на основе известной геометрии элементов исполнительного механизма.
В некоторых примерах торможение и ускорение автомобиля дает различные степени вызванного вращения на выходном валу и роторах. Для компенсации этого двигатели могут быть собраны со статорами, имея известный заданный угол поворота относительно идеального выравнивания, таким образом вращающие моменты при торможении и ускорении являются одинаковыми. В некоторых примерах подвеска также включает в себя акселерометры, которые измеряют ускорение транспортного средства в направлении перемещения (в противоположность вертикальному ускорению, компенсированному исполнительным механизмом). Эта информация может быть использована для того, чтобы предсказать и компенсировать вращение, вызванное резким торможением или ускорением.
В некоторых примерах, кроме контура управления, компенсирующего инерцию, внешний контур управления используется для управления двигателями таким образом, что исполнительный механизм отвечает непосредственно на ввод команды усилия, т.е. исполнительный механизм управляется непосредственно в качестве силового источника, с точки зрения внешних элементов управления. Для осуществления этого датчик используется для определения выходного усилия исполнительного механизма. Измеренное выходное усилие передается по каналу обратной связи и объединяется с командой требуемого усилия в контуре обратной связи для приведения исполнительного механизма к требуемому выходному усилию. Значение силовой обратной связи может представлять собой выход датчика усилия прямого действия, например тензодатчика, или оно может представлять собой что-либо менее прямое, например разницу акселерометров со стороны автомобиля и со стороны колеса, разделенную на значение массы.
Другие варианты осуществления изобретения входят в объем прилагаемой формулы изобретения и другой формулы изобретения, которая может быть уточнена заявителем.
Реферат
Изобретения относятся к исполнительному элементу подвески транспортного средства. Исполнительный механизм (100) по первому варианту включает в себя первый вращательный двигатель (102), второй вращательный двигатель (104) и трансмиссию, соединенную с первым и вторым вращательными двигателями. Трансмиссия преобразует вращение первого вращательного двигателя (102) в первом направлении и одновременное вращение второго вращательного двигателя (104) во втором направлении в поступательное движение выходного вала (120) в одном направлении. Исполнительный механизм по второму варианту дополнительно содержит датчик, указывающий выходное усилие трансмиссии, и схему управления, получающую команду усилия и определенное выходное усилие и выполненную для изменения управляющей команды, обеспечиваемой для первого и второго двигателей, основываясь на разнице между командой усилия и определенным выходным усилием. Достигается повышение компактности исполнительного механизма, а также отсутствие воздействия реактивного крутящего момента на конструкцию подвески. 2 н. и 28 з.п. ф-лы, 11 ил.
Формула
первый вращательный двигатель;
второй вращательный двигатель и
трансмиссию, соединенную с первым и вторым вращательными двигателями;
при этом трансмиссия преобразует вращение первого вращательного двигателя в первом направлении и одновременное вращение второго вращательного двигателя во втором направлении в поступательное движение выходного вала в одном направлении.
первую шариковую гайку, соединенную с первым вращательным двигателем;
вторую шариковую гайку, соединенную со вторым вращательным двигателем, при этом первая и вторая шариковые гайки выполнены с противоположными направлениями резьбы; и
шариковый винт, имеющий первый резьбовой участок, соответствующий направлению резьбы первой шариковой гайки, и второй резьбовой участок, соответствующий направлению резьбы второй шариковой гайки.
первую трансмиссию преобразования вращательного движения в поступательное движение, соединенную с первым вращательным двигателем;
вторую трансмиссию преобразования вращательного движения в поступательное движение, соединенную со вторым вращательным двигателем; и
хомут, соединенный с первой и второй трансмиссиями преобразования вращательного движения в поступательное движение.
первый усилитель мощности, присоединенный для приведения в действие, по меньшей мере, первого вращательного двигателя;
датчик положения, указывающий положение трансмиссии; и
схему управления, соединенную с кодером и первым усилителем мощности и выполненную для управления усилителем мощности для приведения в действие первого и второго вращательных двигателей совместно, на основе определения положения кодером.
датчик, указывающий перемещение трансмиссии; и
схему управления, получающую команду усилия и выполненную для:
расчета компенсирующего усилия, основываясь на выраженной инерции трансмиссии и ускорении, рассчитанном от датчика,
расчета общего усилия из команды усилия и компенсирующего усилия и управления первым и вторым двигателями, основываясь на общем усилии.
датчик, указывающий выходное усилие трансмиссии; и
схему управления, получающую команду усилия и определенное выходное усилие и выполненную для изменения управляющей команды, обеспечиваемой для первого и второго двигателей, основываясь на разнице между командой усилия и определенным выходным усилием.
при этом трансмиссия содержит проход, проходящий через выходной вал и соединяющий текучую среду из гофрированной трубки с объемом на втором конце устройства.
первый вращательный двигатель;
второй вращательный двигатель и
трансмиссию, соединенную с первым и вторым вращательными двигателями;
при этом трансмиссия преобразует вращение первого вращательного двигателя в первом направлении и одновременное вращение второго вращательного двигателя во втором направлении в поступательное движение выходного вала в одном направлении,
датчик, указывающий выходное усилие трансмиссии; и
схему управления, получающую команду усилия и определенное выходное усилие и выполненную для изменения управляющей команды, обеспечиваемой для первого и второго двигателей, основываясь на разнице между командой усилия и определенным выходным усилием.
первую шариковую гайку, соединенную с первым вращательным двигателем;
вторую шариковую гайку, соединенную со вторым вращательным двигателем, при этом первая и вторая шариковые гайки выполнены с противоположными направлениями резьбы; и
шариковый винт, имеющий первый резьбовой участок, соответствующий направлению резьбы первой шариковой гайки, и второй резьбовой участок, соответствующий направлению резьбы второй шариковой гайки.
первый усилитель мощности, присоединенный для приведения в действие, по меньшей мере, первого вращательного двигателя;
датчик положения, указывающий положение трансмиссии; и
схему управления, соединенную с кодером и первым усилителем мощности и выполненную для управления усилителем мощности для приведения в действие первого и второго вращательных двигателей совместно, на основе определения положения кодером.
датчик, указывающий перемещение трансмиссии; и
схему управления, получающую команду усилия и выполненную для:
расчета компенсирующего усилия, основываясь на выраженной инерции трансмиссии и ускорении, рассчитанном от датчика,
расчета общего усилия из команды усилия и компенсирующего усилия и
управления первым и вторым двигателями, основываясь на общем усилии.
Комментарии